
画像処理装置、および画像処理方法、並びにプログラム
【課題】距離画像や視差画像に含まれるエラーを低減する補正処理を行う画像処理装置、方法を提供する。
【解決手段】被写体までの距離情報または視差情報を有する距離画像を入力し、距離画像に含まれるエラー信号を検出し、画像領域単位のエラー度合いに応じた合成係数を出力するエラー判定処理部と、距離画像に対するローパスフィルタを適用してノイズ低減距離画像を生成するローパスフィルタ処理部と、距離画像と、ノイズ低減距離画像の合成処理により補正距離画像を生成する距離画像合成部を有し、距離画像合成部は、エラー判定処理部の出力する画像領域単位の合成係数に従って、画像領域単位で距離画像とノイズ低減距離画像の合成比率を設定した合成処理を実行して補正距離画像を生成する。
【解決手段】被写体までの距離情報または視差情報を有する距離画像を入力し、距離画像に含まれるエラー信号を検出し、画像領域単位のエラー度合いに応じた合成係数を出力するエラー判定処理部と、距離画像に対するローパスフィルタを適用してノイズ低減距離画像を生成するローパスフィルタ処理部と、距離画像と、ノイズ低減距離画像の合成処理により補正距離画像を生成する距離画像合成部を有し、距離画像合成部は、エラー判定処理部の出力する画像領域単位の合成係数に従って、画像領域単位で距離画像とノイズ低減距離画像の合成比率を設定した合成処理を実行して補正距離画像を生成する。
【発明の詳細な説明】
【技術分野】
【0001】
本開示は、画像処理装置、および画像処理方法、並びにプログラムに関する。特に、距離画像(視差画像)の生成や補正を行う画像処理装置、および画像処理方法、並びにプログラムに関する。
【背景技術】
【0002】
昨今、立体画像(ステレオ画像とも呼ばれる)を撮影可能としたカメラが普及してきている。例えば、レンズを左右に並べたステレオカメラにより、左眼で観察する左眼用画像と右眼で観察する右眼用画像のペアによって構成される両眼視差画像を撮影するものである。
【0003】
これらの左眼用画像と右眼用画像をそれぞれ分離して観察者の左眼と右眼に提示することを可能とした表示装置(3D表示装置)に表示することで、観察者は画像を立体画像、すなわち3次元(3D)画像として視聴できる。
【0004】
このような左眼用画像と右眼用画像は、立体画像として視聴することのみならず、様々な用途に無利用できる。例えば、立体画像として撮影された被写体に対するカメラからの距離を求め、その距離に応じて画像上の対象物を切り出し、他の画像と合成する処理や、立体的なオブジェクトを3次元空間で再現する処理などが実現されている。
【0005】
この様な立体画像の活用において重要な要素の1つとして、カメラから撮影被写体までの距離を正確に算出することがある。被写体までの距離情報の表現手法としては、例えば距離の値を画像の濃淡で表現した距離画像がある。被写体距離は、左眼用画像と右眼用画像の画素位置のずれに相当する視差に対応するものであり、距離画像は視差画像と呼ばれることもある。
この距離画像(視差画像)を利用して、距離に応じた画像上の対象物を切り出す処理が行われる。このような処理において、距離画像の精度が品質向上の重要なポイントとなっている。
【0006】
この距離画像の品質向上に関して、開示されている従来技術が存在する。例えば、特許文献1(特開平11−120359号公報)は、距離画像を求め、隣接し、かつ、距離値が近い距離値を同じ距離値とし、同じ距離値同士でラベリングし、ラベル毎の面積を求め、面積が一定値以下のラベルが付いた視差をノイズとして、ノイズとされた距離値をもつ画素に対してノイズ除去のためにmedian filter(中央値フィルタ)をかけ、距離画像を求めた元画像のノイズを除去し、元画像から求められる距離画像の精度を向上する手法を提案している。
【0007】
しかしながら、この手法は局所的なノイズ除去の効果はあるが、広範囲にわたって発生した画像のずれなど、広い範囲の画像エラーを除去することは困難であるという問題がある。また、上記特許文献1においては、画像内に存在するノイズ領域を判定するために、画像の区分領域単位のラベリング処理を行い、各ラベリングされた領域単位で距離を求めて、距離単位の面積算出などを行う構成であり、処理コストが大きくなることが予想される。
【先行技術文献】
【特許文献】
【0008】
【特許文献1】特開平11−120359号公報
【発明の概要】
【発明が解決しようとする課題】
【0009】
本開示は、例えば上記の状況に鑑みてなされたものであり、処理コストを低減し、より正確な距離画像(視差画像)を生成する画像処理装置、および画像処理方法、並びにプログラムを提供することを目的とする。
【課題を解決するための手段】
【0010】
本開示の第1の側面は、
被写体までの距離情報または視差情報を有する距離画像を入力し、距離画像に含まれるエラー信号を検出し、画像領域単位のエラー度合いに応じた合成係数を出力するエラー判定処理部と、
前記距離画像に対するローパスフィルタを適用してノイズ低減距離画像を生成するローパスフィルタ処理部と、
前記距離画像と、前記ノイズ低減距離画像の合成処理により補正距離画像を生成する距離画像合成部を有し、
前記距離画像合成部は、
前記エラー判定処理部の出力する画像領域単位の合成係数に従って、画像領域単位で前記距離画像と前記ノイズ低減距離画像の合成比率を設定した合成処理を実行して前記補正距離画像を生成する画像処理装置にある。
【0011】
さらに、本開示の画像処理装置の一実施態様において、前記エラー判定処理部は、前記距離画像の区分領域単位の分散値を算出する分散値計算処理部と、前記分散値計算処理部の算出した区分領域単位の分散値の非線形変換処理によって前記合成係数を算出する非線形変換処理部を有する。
【0012】
さらに、本開示の画像処理装置の一実施態様において、前記エラー判定処理部は、前記距離画像を、横(水平)方向に任意の幅に不均等または均等に分割した分割領域である短冊領域間の類似度を判別する短冊間類似度計算部と、前記短冊間類似度計算部の算出した短冊間類似度の非線形変換処理によって前記合成係数を算出する非線形変換処理部を有する。
【0013】
さらに、本開示の画像処理装置の一実施態様において、前記短冊領域は、3次元画像表示に適用する左眼用画像と右眼用画像によって構成されるステレオ画像の生成処理に際して利用される短冊の幅と同じ幅を有する。
【0014】
さらに、本開示の画像処理装置の一実施態様において、前記短冊間類似度計算部は、距離画像における1つおきの短冊領域間の距離信号の差分絶対値和(SAD)を短冊間類似度として算出する。
【0015】
さらに、本開示の画像処理装置の一実施態様において、前記エラー判定処理部は、前記距離画像を、横(水平)方向に任意の幅に不均等または均等に分割した分割領域である短冊領域間の信号値の凹凸状況を検出してエラー度合いを反映した合成係数を生成して出力する短冊間凹凸判定部を有する。
【0016】
さらに、本開示の画像処理装置の一実施態様において、前記短冊間凹凸判定部は、距離画像における3つの連続する短冊領域の距離信号の平均値を算出し、算出した3つの信号平均値から隣接する短冊間の信号平均値の差分を2つ算出して、算出した2つの差分に基づいて、短冊間凹凸の有無を判定し、該判定結果に応じた合成係数を生成して出力する。
【0017】
さらに、本開示の画像処理装置の一実施態様において、前記短冊間凹凸判定部は、3つの連続する短冊領域の距離信号の平均値を平坦にするためのオフセット値を算出して出力する。
【0018】
さらに、本開示の画像処理装置の一実施態様において、前記ローパスフィルタ処理部は、エッジ保存型ノイズ低減処理を実行する。
【0019】
さらに、本開示の画像処理装置の一実施態様において、前記ローパスフィルタ処理部は、前記オフセット値を適用して、3つの連続する短冊領域の距離信号の平均値を平坦にする補正処理を行った距離画像に対してローパスフィルタを適用してノイズ低減距離画像を生成する。
【0020】
さらに、本開示の第2の側面は、
画像処理装置において実行する画像処理方法であり、
被写体までの距離情報または視差情報を有する距離画像を入力し、距離画像に含まれるエラー信号を検出し、画像領域単位のエラー度合いに応じた合成係数を出力するエラー判定処理ステップと、
前記距離画像に対するローパスフィルタを適用してノイズ低減距離画像を生成するローパスフィルタ処理ステップと、
前記距離画像と、前記ノイズ低減距離画像の合成処理により補正距離画像を生成する距離画像合成ステップを実行し、
前記距離画像合成ステップにおいては、
前記エラー判定処理ステップにおいて出力する画像領域単位の合成係数に従って、画像領域単位で前記距離画像と前記ノイズ低減距離画像の合成比率を設定した合成処理を実行して前記補正距離画像を生成する画像処理方法にある。
【0021】
さらに、本開示の第3の側面は、
画像処理装置において画像処理を実行させるプログラムであり、
被写体までの距離情報または視差情報を有する距離画像を入力し、距離画像に含まれるエラー信号を検出し、画像領域単位のエラー度合いに応じた合成係数を出力するエラー判定処理と、
前記距離画像に対するローパスフィルタを適用してノイズ低減距離画像を生成するローパスフィルタ処理と、
前記距離画像と、前記ノイズ低減距離画像の合成処理により補正距離画像を生成する距離画像合成処理を実行させ、
前記距離画像合成処理においては、
前記エラー判定処理ステップにおいて出力する画像領域単位の合成係数に従って、画像領域単位で前記距離画像と前記ノイズ低減距離画像の合成比率を設定した合成処理を実行して前記補正距離画像を生成させるプログラムにある。
【0022】
なお、本開示のプログラムは、例えば、様々なプログラム・コードを実行可能な汎用システムに対して、コンピュータ可読な形式で提供する記憶媒体、通信媒体によって提供可能なプログラムである。このようなプログラムをコンピュータ可読な形式で提供することにより、コンピュータ・システム上でプログラムに応じた処理が実現される。
【0023】
本開示のさらに他の目的、特徴や利点は、後述する本開示の実施例や添付する図面に基づくより詳細な説明によって明らかになるであろう。なお、本明細書においてシステムとは、複数の装置の論理的集合構成であり、各構成の装置が同一筐体内にあるものには限らない。
【発明の効果】
【0024】
本開示の一実施例構成によれば、距離画像や視差画像に含まれるエラーを低減する補正処理を行う画像処理装置、方法が実現される。
具体的には、被写体までの距離情報または視差情報を有する距離画像を入力し、距離画像に含まれるエラー信号を検出し、画像領域単位のエラー度合いに応じた合成係数を出力するエラー判定処理部と、距離画像に対するローパスフィルタを適用してノイズ低減距離画像を生成するローパスフィルタ処理部と、距離画像と、ノイズ低減距離画像の合成処理により補正距離画像を生成する距離画像合成部を有し、距離画像合成部は、エラー判定処理部の出力する画像領域単位の合成係数に従って、画像領域単位で距離画像とノイズ低減距離画像の合成比率を設定した合成処理を実行して補正距離画像を生成する。
この処理によって、距離画像や視差画像に含まれるエラーを低減する補正された距離画像や視差画像を生成することが可能となる。
【図面の簡単な説明】
【0025】
【図1】立体像の知覚原理と立体像の知覚距離について説明する図である。
【図2】画像処理装置の構成例について説明する図である。
【図3】エラー信号判定処理部の一実施例について説明する図である。
【図4】距離画像に発生するエラーの一例について説明する図である。
【図5】エラー信号判定処理部における非線形変換処理部の実行する分散値から合成係数(err)を算出する処理例について説明する図である。
【図6】距離画像における短冊状のエラーについて説明する図である。
【図7】距離画像における短冊状のエラーについて説明する図である。
【図8】距離画像における短冊状のエラーが発生する理由について説明する図である。
【図9】距離画像における短冊状のエラーが発生する理由について説明する図である。
【図10】短冊単位でまとまって発生する距離画像のエラー判定処理として有効な手法について説明する図である。
【図11】エラー信号判定処理部の一実施例について説明する図である。
【図12】エラー信号判定処理部の短冊間類似度計算部の構成例について説明する図である。
【図13】エラー信号判定処理部の一実施例について説明する図である。
【図14】エラー信号判定処理部の一短冊間凹凸判定部の構成について説明する図である。
【図15】エラー信号判定処理部の一実施例について説明する図である。
【図16】エッジ保存型LPF処理部の一実施例について説明する図である。
【図17】エッジ保存型LPF処理部の一実施例について説明する図である。
【図18】短冊間凹凸補正部の構成例について説明する図である。
【図19】本開示の画像処理装置の生成する補正距離画像を適用した処理例について説明する図である。
【図20】距離画像の生成シーケンスについて説明するフローチャートを示す図である。
【図21】距離画像から得られる被写体距離を適用した被写体切り出し処理のシーケンスについて説明するフローチャートを示す図である。
【図22】距離画像の補正処理シーケレンスについて説明するフローチャートを示す図である。
【発明を実施するための形態】
【0026】
以下、図面を参照しながら本開示の画像処理装置、および画像処理方法、並びにプログラムの詳細について説明する。説明は以下の項目に従って行う。
1.立体像の知覚原理と立体像の知覚距離について
2.画像処理装置の構成例について
3.エラー信号判定処理部の第1構成例
4.短冊単位で発生するエラーについての説明
5.エラー信号判定処理部の第2構成例
6.エラー信号判定処理部の第3構成例
7.3種類のエラー信号判定処理を併用する構成例について
8.エッジ保存型LPFの構成例について
9.本開示の処理によって得られる補正された高精度な距離画像を適用するアプリケーションの例について
10.本開示の構成のまとめ
【0027】
[1.立体像の知覚原理と立体像の知覚距離について]
図1以下を参照して立体像の知覚原理と立体像の距離について説明する。
図1に示す様に、左眼用画像11を観察者の左眼21で観察し、右眼用画像12を右眼22で観察する。左眼用画像11と、右眼用画像12には、被写体距離に応じた画像の位置ずれ(視差)があり、この視差に応じて知覚距離が変更され、観察者は、立体画像として観察することができる。
【0028】
左眼用画像11と右眼用画像12における同一被写体の画素位置のずれ=視差dとし、知覚した立体像の距離:知覚立体像距離Ldとする。
この視差dと知覚立体像距離Ldの関係は、
観察者の眼の位置から表示面までの距離:視距離=Ls、
観察者の両眼の間隔=de、
としたとき、以下の(式1)で示される。
【0029】
【数1】

・・・(式1)
【0030】
このように、視距離Lsが決定されると、視差dと知覚立体像距離Ldは、一方の値が決定すれば他方の値が決定される1対1対応の相互依存データである。
すなわち、前述したように、
(a)知覚立体像距離Ld:観察者の知覚する距離(≒被写体距離)、
(b)視差d:左眼用画像と右眼用画像における同一被写体の画素位置のずれ量、
これら(a),(b)の値は、1対1対応の相互依存データである。
【0031】
以下の実施例の説明では、知覚立体像距離(被写体距離)データを用いた処理として説明するが、被写体距離データの代わりに視差データを適用した処理として実行することも可能である。
以下の説明において、距離画像は、被写体までの距離情報または視差情報を有する画像であるものとして説明する。
【0032】
[2.画像処理装置の構成例について]
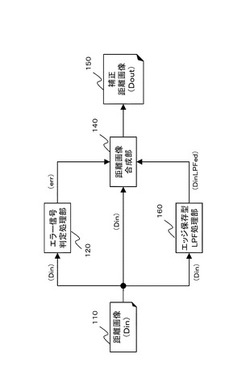
図2は、本開示の画像処理装置の基本構成例を示す図である。距離画像110は、ステレオ視可能な左眼用画像と右眼用画像から求められる。距離画像は、撮影された画像上の被写体距離(知覚立体像距離=観察者や撮影カメラからの距離)を例えば白〜黒の濃淡画像情報として示した画像である。
【0033】
なお、前述したように被写体距離は、左眼用画像と右眼用画像における対応画素位置のずれ量に相当する視差から求められる。したがって距離に応じた濃淡情報は、被写体距離を示すと同時に視差量も示しており、距離画像は視差画像とも呼ばれる。
すなわち、距離画像と視差画像は等価な画像データである。
以下の実施例では、画素単位で被写体までの距離に応じたデータ(距離信号)を有する距離画像を適用した実施例として説明するが、距離画像の代わりに、画素単位で視差信号を有する視差画像を適用した処理として実行することも可能である。
従って、以下の説明において、距離画像は、被写体までの距離情報または視差情報を有する画像として説明する。
【0034】
図2に示すように、距離画像110は、
エラー信号判定処理部120、
距離画像合成部140、
エッジ保存型LPF処理部160、
これらに入力される。
【0035】
エラー信号判定処理部120は、距離画像110を入力し、距離画像110に含まれる被写体距離を示す距離信号(=視差信号)を解析して、距離信号(視差信号)にエラーが発生しているか否かを判定しエラーの度合いを数値で出力する。
【0036】
エラー信号判定処理部120において実行するエラー判定処理としては、例えば以下の値のいずれか、または複数の値を算出して、これらの算出値に基づくエラー判定処理を行う。
(1)距離画像の所定領域単位のばらつき度(分散値)、
(2)距離画像の短冊間の類似度を示す値、
(3)距離画像の短冊間の凸凹度を示す値、
なお、上記(2)、(3)において利用する短冊とは、距離画像110を横(水平)方向に任意の幅に不均等または均等に分割した分割領域を意味する。
これらの処理については後段で詳細に説明する。
【0037】
図2に示すように、距離画像110は、エッジ保存型LPF処理部160に入力される。
エッジ保存型LPF処理部160は、距離画像110に含まれるノイズを除去するフィルタ適用処理を行う。エッジ保存型のローパスフィルタ(LPF:Low Pass Filter)を適用したフィルタ処理を施す。
このLPF処理は、一般的に知られているエッジ保存型LPFであればよく、例えば、εフィルタやバイラテラルフィルタ(Bilateral Filter)等が用いられる。
【0038】
エッジ保存型LPF処理部160において、LPF処理された距離画像は、距離画像合成部140において、元の距離画像110と合成する。
合成処理は、エラー信号判定処理部120から出力される領域単位のエラー度合いを示す数値に応じた合成処理を実行する。
【0039】
なお、エラー信号判定処理部120から出力される領域単位のエラー度合いを示す数値は、
エラー度合い=0.0〜1.0
とする。
0.0がエラー度合いが最も弱く、1.0がエラー度合いがもっとも強いことを示す。
【0040】
距離画像合成部140は、エラー信号判定処理部120から出力される領域単位のエラー度合いを合成係数(err)として適用して、以下の(式2)に従った合成処理を実行する。
【0041】
【数2】
・・・(式2)
【0042】
ただし、
Dout:合成後の補正距離画像150の画素値(距離信号)、
Din:入力した元の距離画像110の画素値(距離信号)、
err:エラー度合い(=合成係数)
DinLPFed:エッジ保存型LPF処理部160においてLPF処理された距離画像
【0043】
上記(式2)は、入力する距離画像110のエラー度合いの高い画素領域については、エッジ保存型LPF処理部160においてLPF処理された距離画像の合成比率(ブレンド比率)を高く設定し、入力する距離画像110のエラー度合いの低い画素領域については、入力する距離画像の合成比率(ブレンド比率)を高く設定した合成処理(ブレンド処理)によって、補正距離画像150を生成する処理を示している。
【0044】
距離画像合成部140は、上記(式2)にしたがって、LPF処理された距離画像と元の距離画像110の合成処理を実行する。
合成処理された距離画像は補正距離画像150として出力される。
【0045】
[3.エラー信号判定処理部の第1構成例]
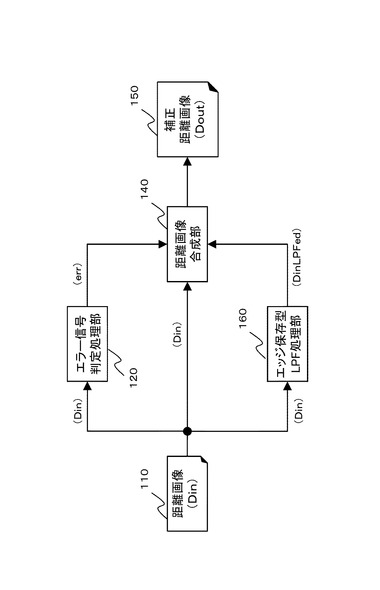
図3にエラー信号判定処理部120の一例を示す。
図3に示すように、エラー信号判定処理部120は、
分散値計算処理部121、
非線形変換処理部122、
を有する。
【0046】
エラー信号判定処理部120に入力された距離画像110は、分散値計算処理部121において、まず、距離画像を予め規定したN×M画素の区分領域に分割し、区分領域単位で画素値の分散値を計算する。
なお、前述したように、距離画像は被写体距離に応じた画素値を有する画像である。
【0047】
図4に、距離画像にエラーのない場合と、エラーのある場合の画像例を示す。
(a)エラーのない距離画像、
(b)エラーが発生した距離画像、
これら2つの画像の例を示している。
【0048】
図に示すように、(b)エラーが発生した距離画像には、ところどころに、周囲とは大きく異なる画素値を持つ領域(図に示す黒い線)が発生している。
このように、エラー発生領域では距離画像の画素値(距離信号)のばらつき度合いが大きくなる。この例ではばらつき度合いをエラー信号の判定に用いるため分散値を利用する。
【0049】
ただし、この構成においては、距離画像における領域単位のばらつき度合いを求めることができればよいので、ばらつき度合いと相関がある値であれば分散値に限定されず、その他の指標値を利用してもよい。例えば、区分領域単位の画素値の標準偏差を利用する構成としてもよい。
【0050】
図3に示す分散値計算処理部121において求められた区分領域(N×M画素)単位の分散値は非線形変換処理部122に入力される。
非線形変換処理部122は、距離画像の区分領域単位のばらつき度合いを示す分散値を、距離画像合成部140で用いる合成係数(err)に変換する処理を行う。
【0051】
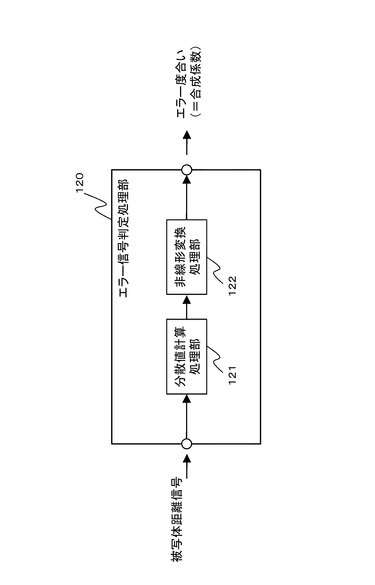
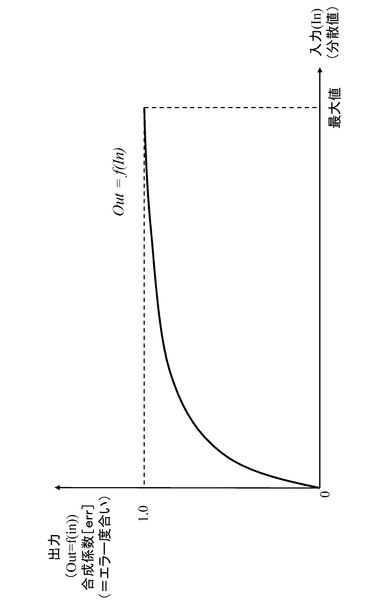
図5は、非線形変換処理部122において実行する非線形変換処理の一例を示している。横軸が、分散値計算処理部121からの入力信号(分散値)である。縦軸が、非線形変換処理部122における非線形変換処理後の出力、すなわち合成係数(err)を示している。
【0052】
非線形変換処理部122は、入力された分散値(In)を、予め規定した関数f(x)により変換して、合成係数[err](Out)を出力する。すなわち、
Out=f(In)
とする。
この変換処理に適用する関数f(x)は、様々な関数が利用可能である。
関数f(x)の一例としては、例えば、以下の(式3)に示す指数関数が適用できる。
f(x)=xβ ・・・(式3)
【0053】
非線形変換処理部122は、上記の(式3)に示されるような指数関数を適用して、入力された分散値(In)の非線形変換処理を行い、例えば図5に示すような入力分散値(In)から出力する合成係数(err)を生成して出力する。
【0054】
なお、上記(式3)において、βは予め設定した係数であり、様々な値に設定可能である。また、非線形変換処理部122における変換関数は、指数関数に限定するものではなく、また線形的な変換を施しても構わない。
【0055】
[4.短冊単位で発生するエラーについての説明]
図6に、距離画像に発生する別のエラー例を示す。この例では、短冊状に距離信号のエラーが発生している。
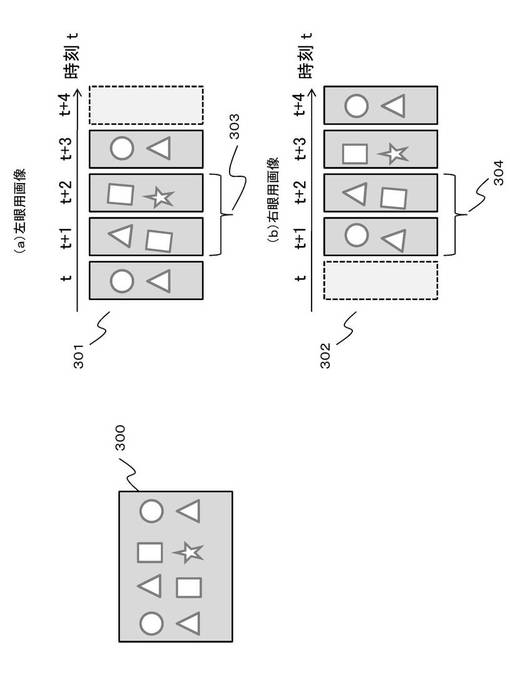
このような短冊単位のエラーは、カメラを水平方向に移動(スイング)させて連続撮影した複数の撮影画像を利用して、各画像から短冊城に切り分けた短冊画像を再合成して、D画像表示に適用する左眼用画像と右眼用画像を生成する処理を行った場合に発生しやすい。
この様なエラーが発生する左眼用画像と右眼用画像の生成例を図7に示す。図7に示す様に、水平方向に移動(スイング)させて連続撮影した複数の撮影画像から切り出した短冊画像を再度合成することで、左眼用画像と右眼用画像を生成する手法である。
このような3D画像生成処理を行うと、図6に示す様な短冊状にオフセットが付いた様なエラーが発生する場合がある。
このようなエラーが発生する理由について、図8、図9を参照して説明する。
図7に示すような、短冊状の画像を左眼用画像と右眼用画像とに合成するステレオ画像の撮影手法では、左眼用画像を構築するための短冊と、右眼用画像を構築するため、左眼用画像と右眼用画像とで異なる撮影位置、すなわち異なる撮影時刻の撮影画像から切り出した短冊を利用している。
【0056】
例えば、図8に示すような画像300に対応する(a)左眼用画像を構築するための短冊画像301と、(b)右眼用画像を構築するための短冊画像302は、図に示すような撮影時間t,t+1,t+2,・・・の各時間に連続撮影された複数の画像から切り出した短冊画像の合成処理によって生成される。
【0057】
図8に示すように、時刻tからt+4にわたって撮影された複数の画像から、短冊を切り出して合成することで、(a)左眼用画像と(b)右眼用画像が生成される。
【0058】
これらの各短冊領域の画像は、例えば撮影者が手でカメラを水平方向にスイングさせて撮影される画像である。この撮影処理に際して、水平方向にのみ正確に移動されれば問題ないが、多くの場合、カメラの垂直方向の移動や回転などが発生してしまう。
【0059】
例えば、時刻t+1とt+2において、被写体方向軸を中心とした回転変動がカメラに加わったとする。
例えば、(a)左眼用画像を構成する短冊画像303と、(b)右眼用画像を構成する短冊画像304の短冊が回転変動により回転して撮影されてしまった短冊を示す。
これらの短冊画像303,304から明らかなように、回転変動の結果、同じ被写体が異なる角度で写されてしまう現象が発生する。
【0060】
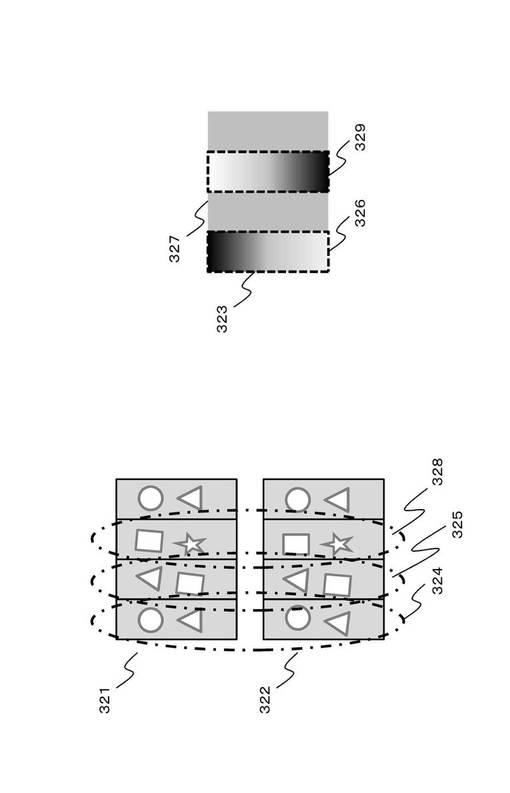
このような回転変動が発生した短冊を合成した結果を、図9に示すように、左眼用画像321,右眼用画像322として利用する。
これら、左眼用画像321と,右眼用画像322から求められた距離画像を距離画像323として図9に示す。
【0061】
一般的に、距離画像は、左眼用画像と右眼用画像上の、同じ被写体間の視差を求めることで、被写体までの距離を求める。
図9では、例えば短冊画像32、325、328で示した左眼用画像の短冊と右眼用画像の短冊間の視差から距離を求めることになる。
【0062】
本例では、時刻t+1とt+2において、被写体方向軸を中心とした回転変動がカメラに加わっているので、短冊324の左眼用画像の短冊と、右眼用画像の短冊の組みに着目する。
これらの、短冊の組みにおいて、左眼用画像の短冊では正常、右眼用画像の短冊では回転変動が加わっている。
【0063】
この結果、距離画像323において、短冊の組み324から求められた距離画像の短冊領域326はエラーが含まれた距離画像となる。
また、短冊325の組みでは、左眼用画像の短冊と右眼用画像の短冊の両方に回転変動が加わっており、両方の短冊に同じ回転変動が加わるため、求められる距離画像の短冊領域327は正しい距離画像となる。
【0064】
さらに、短冊328の組みでは、短冊324と同様の理由で、距離画像の短冊領域329はエラーが含まれた距離画像となる。
このように、距離画像には、被写体方向軸を中心とした回転変動がカメラに加わった場合の距離画像のエラーは、距離画像の短冊領域の一つおきに発生する。
【0065】
この様な短冊単位のエラー判定には、前述の図3で説明した画素領域単位のばらつきを求める手法、すなわち、距離画像のN×M画素単位の画素値の分散値を算出して、分散値に基づいてエラーを判定する手法は適用できない。
【0066】
[5.エラー信号判定処理部の第2構成例]
上述した短冊単位でまとまって発生する距離画像のエラー判定処理として有効な手法について、以下説明する。
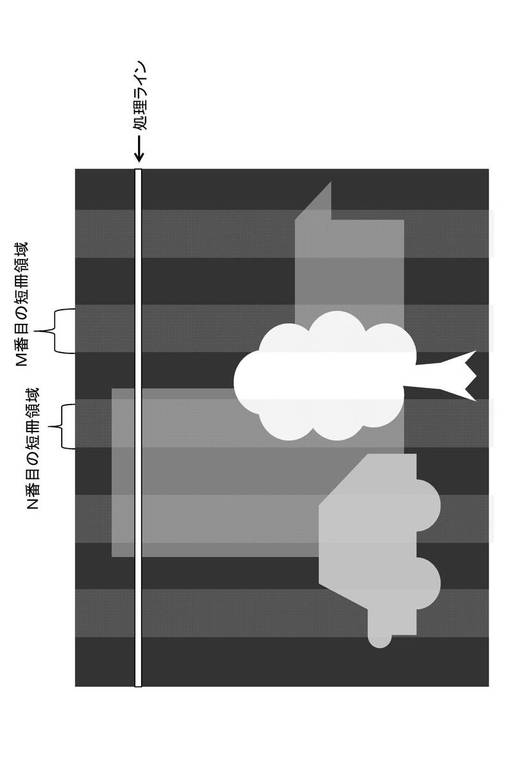
図10を参照して、このエラー判定手法の一例について概略を説明する。
【0067】
前述した、短冊上に撮影された画像を用いてのステレオ画像の生成では、距離画像に含まれる距離信号のエラーは短冊内ではなく短冊間で発生する。そこで、距離画像をステレオ画像としての左眼用画像と右眼用画像の画像生成に適用した短冊と同じ位置で分割する。もちろん、これは、仮想的な分割でもかまわない。
【0068】
続いて、距離画像に含まれる距離信号のエラーを検出する水平方向の処理ラインを設定する。
短冊間にエラーが発生するので、処理ラインのN番目の短冊とM番目の短冊を比較することによりその短冊にエラーが発生しているか否かを判定する。本手法では、判定手法として水平の処理ラインのN番目の短冊とM番目の短冊間の類似度を求め、類似度が大きければエラーが発生していると判定する。
【0069】
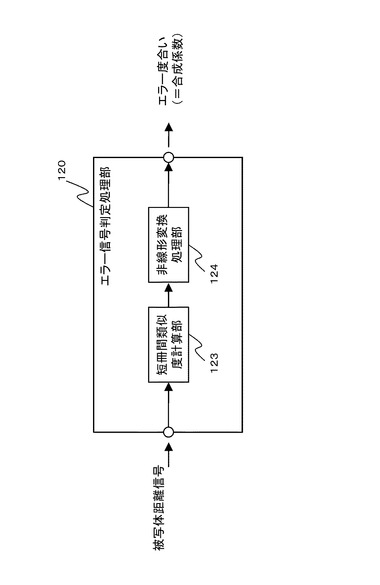
このエラー判定手法を用いたエラー信号判定処理部120の構成例を、図11に示す。
図11に示すエラー信号判定処理部120は、先に説明した図2の画像処理装置のエラー信号判定処理部120の一構成例を示し、特に短冊単位のエラーの検出に有効な構成を持つ。
【0070】
図11に示すエラー信号判定処理部120の構成と処理について説明する。
エラー信号判定処理部120は、図11に示すように、
短冊間類似度計算部123、
非線形変換処理部124、
を有する。
【0071】
エラー信号判定処理部120に入力された距離画像110は、短冊間類似度計算部123において、図10を参照して説明した水平方向の処理ライン単位に任意のN番目の短冊とM番目の短冊間とで類似度を計算する。
【0072】
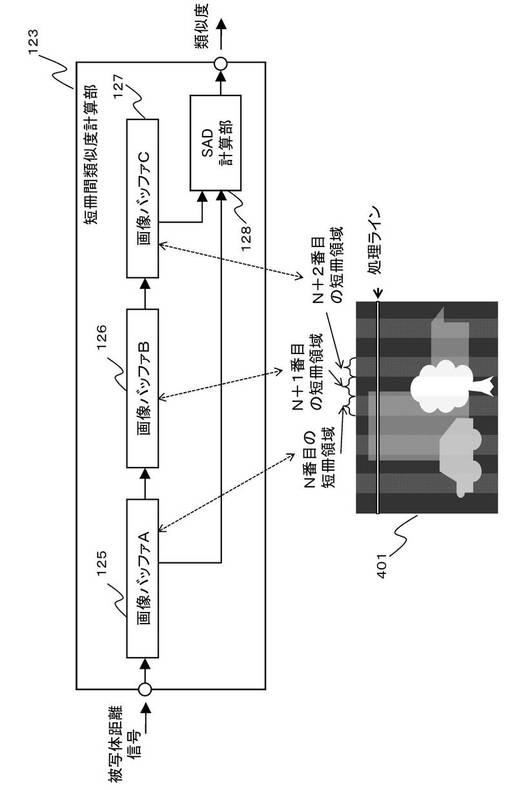
図12を参照して、短冊間類似度計算部123の詳細構成と処理について説明する。
短冊間類似度計算部123には、距離画像110の距離信号が、水平方向の走査ラインに従って入力される。
走査ラインに従って入力された距離信号は処理ライン単位に画像バッファA125、画像バッファB126、画像バッファC127に格納される。それぞれのバッファの幅は短冊と等しくなっている。
【0073】
各パッファの格納データは、例えば図12に示すように、図12に示す距離画像401の短冊単位の距離画像が格納される。すなわち、
画像バッファA125には、N番目の短冊の距離信号からなる距離画像データ、
画像バッファB126には、N+1番目の短冊の距離信号からなる距離画像データ、
画像バッファA127には、N+2番目の短冊の距離信号からなる距離画像データ、
これらの距離信号データが格納される。
【0074】
SAD(差分絶対値和:Sum of Absolute Difference)計算部128は、画像バッファA125と画像バッファC127とに格納された、同一の水平ラインの1つおきの短冊間の距離信号の差分絶対値和を算出する。
【0075】
SAD計算部128は、1つおきの短冊間のSAD(差分絶対値和)RSADを以下の(式4)に従って算出する。
【0076】
【数3】
・・・(式4)
【0077】
なお、
DA(i):画像バッファA125の位置iの距離信号
DC(i):画像バッファC127の位置iの距離信号
RSAD:SAD(差普選絶対値和)
N:画像バッファA125のサイズ
である。
【0078】
この差分絶対値和は、各短冊間の類似度を示す。SAD計算部128の算出した差分絶対値和(SAD値)は、非線形変換処理部124に出力される。
非線形変換処理部124は、先の実施例で説明した例えば図5に示す非線形変換関数f(x)を適用して、上記のSAD(差分絶対値和)RSADの非線形変換処理を実行して、距離画像合成部140に出力する合成係数(err)を生成して出力する。
【0079】
なお、本実施例では、各短冊間の信号の類似度を示す指標値としてSAD(差分絶対値和)を適用した処理例について説明したが、他の類似度を求めるアルゴリズムを用いる構成としてもよい。例えば、SSD(Sum of Squared Difference)の他、正規化相互相関等(Normalized Cross―Correlation)等を用いることも可能である。
【0080】
また、図12に示す構成では、バッファサイズを短冊幅に合わせ、3つのバッファを用いることにより、N番目の短冊とN+2番目の短冊間とで類似度を計算しているが、この構成は元のステレオ画像をどのように短冊から生成しているかに依存するため、この構成のかぎりではない。
例えば、短冊の幅が不均等である場合は、短冊境界情報の入力と、距離信号から比較する短冊の範囲内の距離信号を取得する手段とで、短冊幅に合わせて類似度を求めることができるように構成する必要がある。
【0081】
[6.エラー信号判定処理部の第3構成例]
次に、図13以下を参照して、図6〜図9を参照して説明した短冊単位のエラー判定処理のもう1つの処理例について説明する。
図6〜図9を参照して説明した短冊単位でエラーが発生した場合、短冊単位の距離信号の平均値に注目すると、平均値が短冊単位で大きく変化する。
先に図8、図9を参照して説明したように、エラーの発生した短冊は1つおきに設定される可能性が高い。
【0082】
従って、エラーの発生短冊を含む距離画像は、短冊の距離信号の平均値が1つおきに大きく異なる傾向がある。すなわち、短冊間で距離信号の平均値が凸凹している。そこで、短冊単位に視差が凸凹していることを検出した場合にエラーありと判定することができる。
【0083】
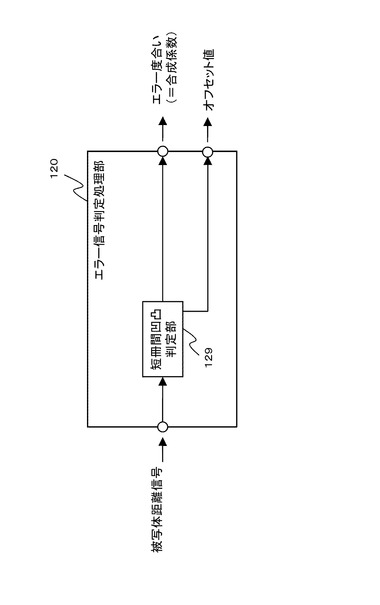
この手法を用いた、エラー信号判定処理部120の一例を、図13に示す。
図13に示すエラー信号判定処理部120は、先に説明した図2の画像処理装置のエラー信号判定処理部120の一構成例を示し、特に短冊単位のエラーの検出に有効な構成を持つ。
【0084】
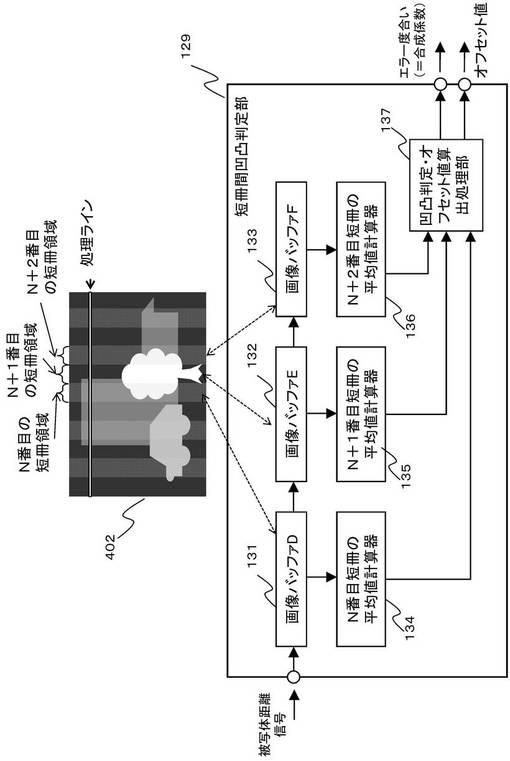
本処理例におけるエラー信号判定処理部120は、図13に示すように、
短冊間凹凸判定部129、
を有する。
【0085】
エラー信号判定処理部120に入力された距離画像110は、短冊間凹凸判定部129において、先に図10を参照して説明した水平方向の処理ラインに沿って、N番目とN+1番目とN+2番目の短冊間で、各短冊の距離信号の平均値に凹凸が存在するか否かを判定する。
【0086】
図14を参照して、短冊間凹凸判定部129の詳細構成と処理について説明する。
エラー信号判定処理部120に入力された距離画像110は、処理ライン単位に画像バッファD131、画像バッファE132、画像バッファF133に送られて格納される。それぞれのバッファの幅は短冊と等しくなっている。
【0087】
各パッファの格納データは、例えば図14に示すように、図14に示す距離画像402の短冊単位の距離画像が格納される。すなわち、
画像バッファD131には、N番目の短冊の距離信号からなる距離画像データ、
画像バッファE132には、N+1番目の短冊の距離信号からなる距離画像データ、
画像バッファF133には、N+2番目の短冊の距離信号からなる距離画像データ、
これらの距離信号データが格納される。
【0088】
各バッファに格納された距離画像データに基づいて、N番目短冊の平均値計算器134、N+1番目短冊の平均値計算器135、N+2番目短冊の平均値計算器136において、N〜N+2番目の各短冊領域の短冊毎の平均値が計算される。
【0089】
凹凸判定・オフセット値算出処理部137では、
N番目短冊と、N+1番目短冊と、N+2番目短冊の平均値の関係が、
(1)N番目の平均値<N+1番目の平均値、かつ、N+1番目の平均値>N+2番目の平均値、
(2)N番目の平均値>N+1番目の平均値、かつ、N+1番目の平均値<N+2番目の平均値、
上記(1)または(2)のいずれかが成立したか否か判定する。
【0090】
上記の(1)または(2)が成立していれば、エラーと判定される合成係数(err)、本実施例ではerr=1.0を距離画像合成部140に出力する。
上記の(1)、(2)のいずれも成立していなければ、エラーではないと判定される合成係数(err)、本実施例ではerr=0.0を距離画像合成部140に出力する。
【0091】
なお、図14に示す構成では、バッファサイズを短冊幅に合わせ、3つのバッファを用いることにより、N番目の短冊とN+1番目の短冊とN+2番目の短冊の平均値を求め、凹凸の判定を行っているが、この構成は元のステレオ画像をどのように短冊から生成しているかに依存するため、この構成のかぎりではない。
【0092】
例えば、短冊の幅が不均等である場合は、短冊境界情報の入力と、距離信号から比較する短冊の範囲内の距離信号を取得する手段とで、短冊幅に合わせて類似度を求めることができるように構成する必要がある。
【0093】
続いて、凹凸判定・オフセット値算出処理部137で求めるオフセット値について説明する。このオフセット値の使用例については後述する。
短冊間の距離信号の平均値が凹凸であることが検出された場合、短冊の平均値を平坦にすることでエラー補正が可能であると考えられる。
【0094】
そこで、本実施例では、N番目短冊とN+1番目短冊とN+2番目短冊の距離信号の平均値が平坦になるように、以下の(式5)に従って距離信号のオフセット値を算出する。
【0095】
【数4】
・・・・・(式5)
【0096】
ただし、
AveN:N番目短冊の距離信号の平均値
AveN+1:N+1番目短冊の距離信号の平均値
AveN+2:N+2番目短冊の距離信号の平均値
【0097】
なお、上記(式5)において、(×1/2)の項は、オフセット値の効果の強弱を決定する調整パラメータであり、効果をみて、最適な値に変更するといった調整をおこなうことが好ましい。上記式に従って求められたオフセット値は、後述の短冊間凹凸補正部170の補正処理において用いられる。
【0098】
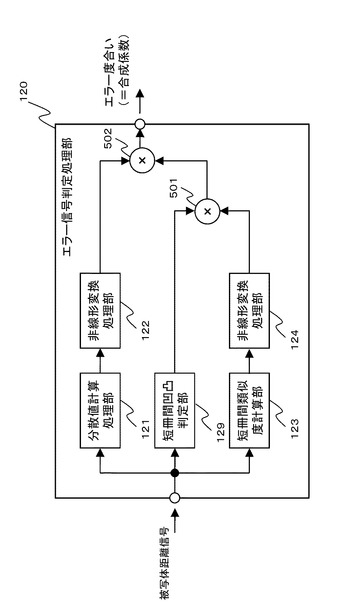
[7.3種類のエラー信号判定処理を併用する構成例について]
これまで、3種類のエラー信号判定処理の例を示したが、これらを全て使用することも可能である。そのエラー信号判定処理部120の構成例を、図15に示す。
【0099】
図15に示すエラー信号判定処理部120は、
(a)[x.エラー信号判定処理部の第1構成例]において、図3を参照して説明した分散値計算処理部121と非線形変換処理部122、
(b)[x.エラー信号判定処理部の第2構成例]において、図11を参照して説明した短冊間類似度計算部123と非線形変換処理部124、
(c)[x.エラー信号判定処理部の第3構成例]において、図13を参照して説明した短冊間凹凸判定部129、
これらを並列に設定した構成を持つ。
【0100】
本実施例では、上記(a)〜(c)のエラー判定処理の出力を0.0〜1.0の範囲とし、1.0の時にエラー度合いがもっとも強いとしているので、それぞれの出力の乗算を、乗算部501,502において算出して、この算出結果をエラー判定結果として、これを合成係数(err)として距離画像合成部140に出力することを可能としている。
なお、これ以外の構成も可能であり、例えばそれぞれのエラー度合いに任意の係数をかけ、エラー度合いに重みをつけて入力距離信号のエラー特性に合わせる構成としてもよい。
【0101】
[8.エッジ保存型LPFの構成例について]
先に、図2を参照して説明したように、距離画像合成部140において、合成係数(err)に応じて合成される処理対象画像は、
(1)入力する距離画像110(=Din)、
(2)エッジ保存型LPF処理部の出力するフィルタ処理画像(=DinLPFed)、
これらの2つの画像である。
【0102】
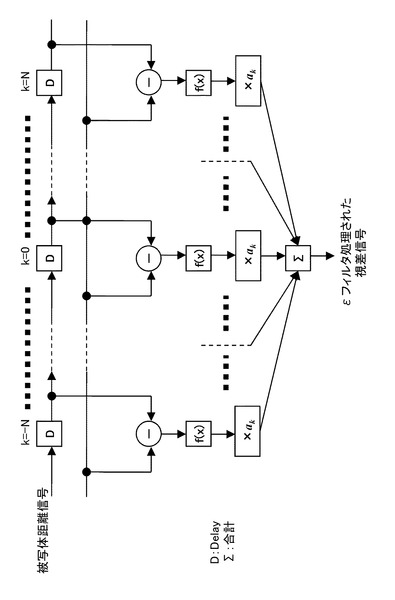
エッジ保存型LPF処理部160では、距離画像110に含まれるノイズ低減を目的としたエッジ保存型のフィルタ適用処理が実行される。
この処理に適用されるフィルタの一例として、εフィルタの構成例を図16に示す。
εフィルタは、入力画素値をx(n)、出力画素値をy(n)としたとき、以下の(式6)によって定義されるフィルタである。
【0103】
【数5】
・・・・・(式6)
【0104】
ここで、f()は、以下の(式7)で定義される関数である。
【0105】
【数6】
・・・・・(式7)
【0106】
上記(式7)中のαは、
α=0またはα=ε等が定義可能である。
また、
上記(式6)に示すakは非再帰型線形低域型フィルタ(FIRフィルタ)のフィルタ係数であり、直流成分を保存するために総和が1.0となるように設定する。
【0107】
エッジ保存型LPF処理部160において適用されるεフィルタは、図16に示す構成を有する。図16に示す例は、N×2+1TAPのεフィルタを構成するブロック図であり、一般的なFIRフィルタの構成をとる。
εフィルタの構成は、遅延器Dで保持される距離画像の画素値(距離信号)を、k=0の中央の画素値(距離信号)との差をとり、関数ak×関数f(x)の演算処理を実行し、タップ長分の合計をとる構成である。
【0108】
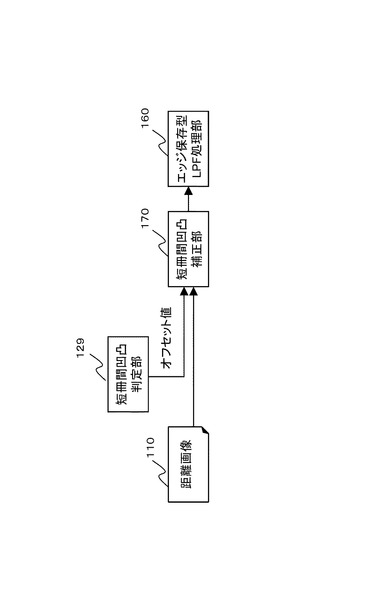
エッジ保存型LPF処理160の別の構成例を図17に示す。
この図17に示す構成は、先に、図13、図14を参照して説明した短冊間凹凸判定部129を有する構成において適用可能な構成である。
図17に示すように、エッジ保存型LPF処理160は、入力として、距離画像110ではなく、短冊間凹凸判定部129で求められたオフセット値に従って、短冊間凹凸補正部170で補正した距離画像を入力する。
【0109】
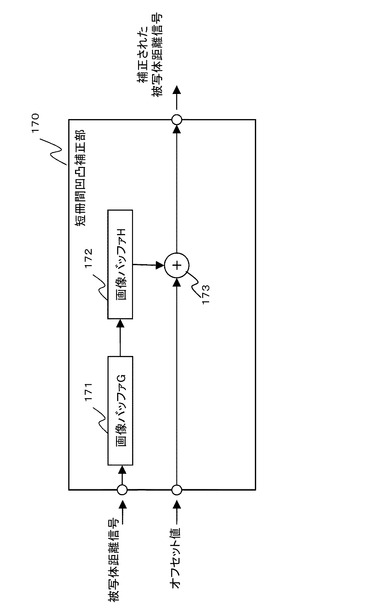
短冊間凹凸補正部170の構成例を図18に示す。
短冊間凹凸補正部170は、距離画像の距離信号を水平ライン単位で順次入力し、さらに、短冊間凹凸判定部120の生成したオフセット値を入力する。
【0110】
入力された距離信号は処理ライン単位に画像バッファG171、画像バッファH172に送られる。それぞれのバッファの幅は、先に図14を参照して説明した短冊間凹凸判定部129の画像バッファD131、画像バッファE132と同じ幅となっており、短冊間凹凸判定部で求められた補正値が同じ短冊上の距離信号へ反映される様に構成されている。
【0111】
画像バッファH172より出力された短冊単位の距離画像の距離信号に対して、短冊間凹凸判定部129で求めたオフセット値、すなわち、先に説明した(式5)に従って算出したオフセット値を加算したオフセット加算距離画像を生成して、エッジ保存型LPF処理部160へ出力する。
エッジ保存型LPF処理部160は、このオフセット加算距離画像に対して、エッジ保存型のノイズ低減処理フィルタを摘要してノイズ低減処理を行う。このオフセット加算距離画像の生成処理を加えることにより、ノイズ低減効果が高くなり、その後の合成処理におけるエラー信号の補正効果もより高くなる。
【0112】
[9.本開示の処理によって得られる補正された高精度な距離画像を適用するアプリケーションの例について]
次に、本開示の処理によって得られる補正された高精度な距離画像あるいは視差画像を摘要するアプリケーションの例について説明する。なお、距離画像(視差画像)は、デジタルカメラ、カムコーダ、携帯電話、ゲーム機器、コンテンツ編集機、PC、TV等の機器の様々なアプリケーションでも適用可能である。以下では、その一部の例について説明する。
【0113】
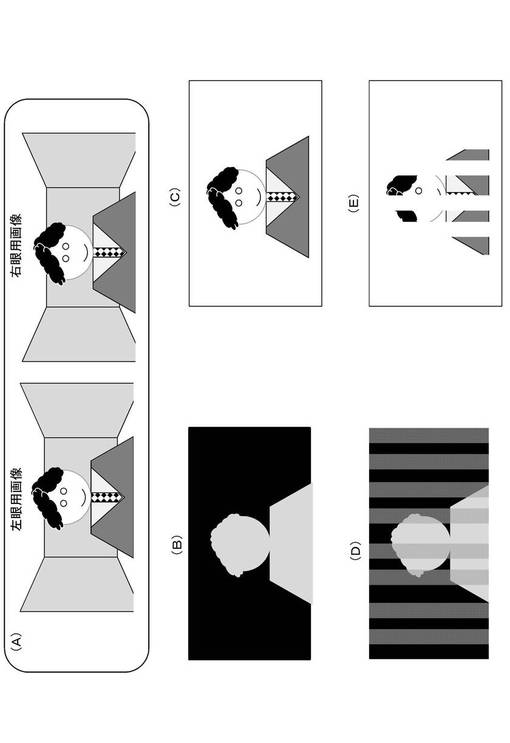
例として、図19(A)に示す様な左眼用画像と右眼用画像を入力し、図19(B)に示す距離画像を求める。
次に、この(B)距離画像の距離情報を元に被写体と背景を分離し、図19(C)の様に被写体だけを出力するアプリケーションについて説明する。
【0114】
まず、距離画像(=視差画像)を求める処理シーケンスについて、図20に示すフローチャートを参照して説明する。
この処理は、例えばPC等の画像処理装置におけるデータ処理部、すなわち予め規定されたシーケンスに従ったプログラムを実行するCPU等を備えたデータ処理部において実行可能である。
【0115】
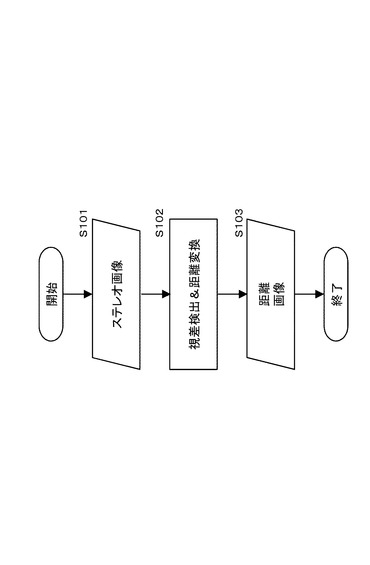
まず、ステップS101において、図19(A)に示すような左眼用画像と右眼用画像によって構成されるステレオ画像を入力する。次に、ステップS102において、入力されたステレオ画像、すなわち左眼用画像と右眼用画像を適用した視差検出処理を実行し、検出された視差情報に従った被写体距離の算出を実行する。視差および被写体距離は、例えば左眼用画像、あるいは右眼用画像の画素単位で算出する。
次に、ステップS103において、画素単位で算出した距離信号を反映した濃淡等の画素値信号を設定した距離画像を生成する。
【0116】
続いて、生成した距離画像を利用して、被写体を分離する処理について、図21に示すフローチャートを参照して説明する。
すなわち、図19(B)に示す距離画像を利用して、図19(C)に示す被写体分離画像を生成する処理である。
この処理も、例えばPC等の画像処理装置におけるデータ処理部、すなわち予め規定されたシーケンスに従ったプログラムを実行するCPU等を備えたデータ処理部において実行可能である。
【0117】
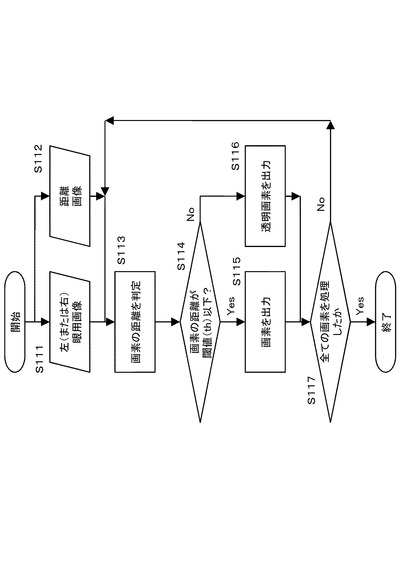
ステップS111、S112において、左(または右)眼用画像と、図20を参照して説明したシーケンスによって求められた距離画像を入力する。
【0118】
次に、ステップS113において、左(または右)眼用画像の画素単位で、その画素の距離を距離画像から取得する。
次に、ステップS114において、画素単位の距離と、予め設定したしきい値(th)とを比較する。
【0119】
ステップS114において、距離がしきい値(th)以下と判断された画素領域については、所定距離より手前にある被写体領域であると判断し、ステップS115に進み、画素を出力する。
一方、ステップS114において、距離がしきい値(th)より大きいと判断された画素領域については、所定距離より奥にある被写体領域であると判断し、ステップS116に進み、透明画素(画素値の設定なし、あるいは白または黒等の一色の画素値)を出力する。
ステップS117においてすべての画素について処理が終了したか判断し、全ての画素について処理が終了したのであれば、処理を終了する。
【0120】
この処理に従えば、例えば、図19(B)に示すように、距離画像にエラーが含まれていなければ、図19(C)に示すような特定の被写体を切り出すことができる。
しかしながら、通常は図19(D)に示す距離画像のように、距離画像にエラーが含まれており、このようなエラーを含む距離画像を摘要すると、図21に示すフローに従った処理を実行しても、例えば、図19(E)に示すような被写体の正しい切り出しができない。
【0121】
しかし、図2以下を参照して説明した本開示の画像処理装置により、エラーの含まれる距離画像の補正を行い、正確な距離画像(=視差画像)を求め、補正された距離画像を適用して図21に示すフローを実行することで、図19(C)に示すように特定の被写体を正確に切り出すことが可能となる。
【0122】
本開示の画像処理装置によって実行するエラーの含まれる距離画像の補正処理のシーケンスについて図22に示すフローチャートを参照して説明する。
【0123】
まず、ステップS151において、図19(A)に示すような左眼用画像と右眼用画像によって構成されるステレオ画像を入力する。次に、ステップS152において、入力されたステレオ画像、すなわち左眼用画像と右眼用画像を適用した視差検出処理を実行し、検出された視差情報に従った被写体距離の算出を実行する。視差および被写体距離は、例えば左眼用画像、あるいは右眼用画像の画素単位で算出する。
次に、ステップS153において、画素単位で算出した距離信号を反映した濃淡等の画素値信号を設定した距離画像を生成する。
この距離画像にはエラーが含まれている可能性がある。
【0124】
なお、先に図2を参照して説明した構成では、すでに生成された距離画像を入力して補正処理を実行する構成として説明したが、図22に示すフローのステップS151〜S153の処理を行う距離画像生成部を有する構成としてもよい。この場合、画像処理装置には、距離画像は入力されず、ステレオ画像としての左眼用画像と右眼用画像のみが入力される。
【0125】
ステップS154の距離画像補正処理は、図2〜図18を参照して説明した画像処理装置において実行する距離画像補正処理である。
この距離画像補正処理によって、距離画像に含まれるエラーは除去または減少し、高精度な補正された距離画像が生成される。
ステップS155において、補正された距離画像を出力する。
【0126】
この補正された距離画像を摘要して、先に説明した図21に示すフローに従った処理を実行することで、距離に応じた被写体切り出し処理をより正確に実行することが可能となる。
【0127】
[10.本開示の構成のまとめ]
以上、特定の実施例を参照しながら、本開示の実施例について詳解してきた。しかしながら、本開示の要旨を逸脱しない範囲で当業者が実施例の修正や代用を成し得ることは自明である。すなわち、例示という形態で本発明を開示してきたのであり、限定的に解釈されるべきではない。本開示の要旨を判断するためには、特許請求の範囲の欄を参酌すべきである。
【0128】
なお、本明細書において開示した技術は、以下のような構成をとることができる。
(1) 被写体までの距離情報または視差情報を有する距離画像を入力し、距離画像に含まれるエラー信号を検出し、画像領域単位のエラー度合いに応じた合成係数を出力するエラー判定処理部と、
前記距離画像に対するローパスフィルタを適用してノイズ低減距離画像を生成するローパスフィルタ処理部と、
前記距離画像と、前記ノイズ低減距離画像の合成処理により補正距離画像を生成する距離画像合成部を有し、
前記距離画像合成部は、
前記エラー判定処理部の出力する画像領域単位の合成係数に従って、画像領域単位で前記距離画像と前記ノイズ低減距離画像の合成比率を設定した合成処理を実行して前記補正距離画像を生成する画像処理装置。
【0129】
(2)前記エラー判定処理部は、前記距離画像の区分領域単位の分散値を算出する分散値計算処理部と、前記分散値計算処理部の算出した区分領域単位の分散値の非線形変換処理によって前記合成係数を算出する非線形変換処理部を有する前記(1)に記載の画像処理装置。
(3)前記エラー判定処理部は、前記距離画像を、横(水平)方向に任意の幅に不均等または均等に分割した分割領域である短冊領域間の類似度を判別する短冊間類似度計算部と、前記短冊間類似度計算部の算出した短冊間類似度の非線形変換処理によって前記合成係数を算出する非線形変換処理部を有する前記(1)または(2)に記載の画像処理装置。
【0130】
(4)前記短冊領域は、3次元画像表示に適用する左眼用画像と右眼用画像によって構成されるステレオ画像の生成処理に際して利用される短冊の幅と同じ幅を有する前記(3)に記載の画像処理装置。
(5)前記短冊間類似度計算部は、距離画像における1つおきの短冊領域間の距離信号の差分絶対値和(SAD)を短冊間類似度として算出する前記(3)または(4)に記載の画像処理装置。
【0131】
(6)前記エラー判定処理部は、前記距離画像を、横(水平)方向に任意の幅に不均等または均等に分割した分割領域である短冊領域間の信号値の凹凸状況を検出してエラー度合いを反映した合成係数を生成して出力する短冊間凹凸判定部を有する前記(1)に記載の画像処理装置。
(7)前記短冊間凹凸判定部は、距離画像における3つの連続する短冊領域の距離信号の平均値を算出し、算出した3つの信号平均値から隣接する短冊間の信号平均値の差分を2つ算出して、算出した2つの差分に基づいて、短冊間凹凸の有無を判定し、該判定結果に応じた合成係数を生成して出力する前記(6)に記載の画像処理装置。
(8)前記短冊間凹凸判定部は、3つの連続する短冊領域の距離信号の平均値を平坦にするためのオフセット値を算出して出力する前記(6)または(7)に記載の画像処理装置。
【0132】
(9)前記ローパスフィルタ処理部は、エッジ保存型ノイズ低減処理を実行する前記(1)〜(8)いずれかに記載の画像処理装置。
(10)前記ローパスフィルタ処理部は、前記オフセット値を適用して、3つの連続する短冊領域の距離信号の平均値を平坦にする補正処理を行った距離画像に対してローパスフィルタを適用してノイズ低減距離画像を生成する前記(1)〜(9)いずれかに記載の画像処理装置。
【0133】
さらに、上記した装置等において実行する処理の方法や、処理を実行させるプログラムも本開示の構成に含まれる。
【0134】
また、明細書中において説明した一連の処理はハードウェア、またはソフトウェア、あるいは両者の複合構成によって実行することが可能である。ソフトウェアによる処理を実行する場合は、処理シーケンスを記録したプログラムを、専用のハードウェアに組み込まれたコンピュータ内のメモリにインストールして実行させるか、あるいは、各種処理が実行可能な汎用コンピュータにプログラムをインストールして実行させることが可能である。例えば、プログラムは記録媒体に予め記録しておくことができる。記録媒体からコンピュータにインストールする他、LAN(Local Area Network)、インターネットといったネットワークを介してプログラムを受信し、内蔵するハードディスク等の記録媒体にインストールすることができる。
【0135】
なお、明細書に記載された各種の処理は、記載に従って時系列に実行されるのみならず、処理を実行する装置の処理能力あるいは必要に応じて並列的にあるいは個別に実行されてもよい。また、本明細書においてシステムとは、複数の装置の論理的集合構成であり、各構成の装置が同一筐体内にあるものには限らない。
【産業上の利用可能性】
【0136】
以上、説明したように、本開示の一実施例構成によれば、距離画像や視差画像に含まれるエラーを低減する補正処理を行う画像処理装置、方法が実現される。
具体的には、被写体までの距離情報または視差情報を有する距離画像を入力し、距離画像に含まれるエラー信号を検出し、画像領域単位のエラー度合いに応じた合成係数を出力するエラー判定処理部と、距離画像に対するローパスフィルタを適用してノイズ低減距離画像を生成するローパスフィルタ処理部と、距離画像と、ノイズ低減距離画像の合成処理により補正距離画像を生成する距離画像合成部を有し、距離画像合成部は、エラー判定処理部の出力する画像領域単位の合成係数に従って、画像領域単位で距離画像とノイズ低減距離画像の合成比率を設定した合成処理を実行して補正距離画像を生成する。
この処理によって、距離画像や視差画像に含まれるエラーを低減する補正された距離画像や視差画像を生成することが可能となる。
【符号の説明】
【0137】
11 左眼用画像
12 右眼用画像
21 左眼
22 右眼
110 距離画像
120 エラー信号判定処理部
121 分散値計算処理部
122 非線形変換処理部
123 短冊間類似度計算部
124 非線形変換処理部
125〜127 画像バッファ
128 SAD計算部
129 短冊間凹凸無判定部
131〜133 画像バッファ
134〜136 平均値計算器
137 凹凸判定・オフセット値算出処理部
140 距離画像合成部
150 補正距離画像
160 エッジ保存型LPF処理部
【技術分野】
【0001】
本開示は、画像処理装置、および画像処理方法、並びにプログラムに関する。特に、距離画像(視差画像)の生成や補正を行う画像処理装置、および画像処理方法、並びにプログラムに関する。
【背景技術】
【0002】
昨今、立体画像(ステレオ画像とも呼ばれる)を撮影可能としたカメラが普及してきている。例えば、レンズを左右に並べたステレオカメラにより、左眼で観察する左眼用画像と右眼で観察する右眼用画像のペアによって構成される両眼視差画像を撮影するものである。
【0003】
これらの左眼用画像と右眼用画像をそれぞれ分離して観察者の左眼と右眼に提示することを可能とした表示装置(3D表示装置)に表示することで、観察者は画像を立体画像、すなわち3次元(3D)画像として視聴できる。
【0004】
このような左眼用画像と右眼用画像は、立体画像として視聴することのみならず、様々な用途に無利用できる。例えば、立体画像として撮影された被写体に対するカメラからの距離を求め、その距離に応じて画像上の対象物を切り出し、他の画像と合成する処理や、立体的なオブジェクトを3次元空間で再現する処理などが実現されている。
【0005】
この様な立体画像の活用において重要な要素の1つとして、カメラから撮影被写体までの距離を正確に算出することがある。被写体までの距離情報の表現手法としては、例えば距離の値を画像の濃淡で表現した距離画像がある。被写体距離は、左眼用画像と右眼用画像の画素位置のずれに相当する視差に対応するものであり、距離画像は視差画像と呼ばれることもある。
この距離画像(視差画像)を利用して、距離に応じた画像上の対象物を切り出す処理が行われる。このような処理において、距離画像の精度が品質向上の重要なポイントとなっている。
【0006】
この距離画像の品質向上に関して、開示されている従来技術が存在する。例えば、特許文献1(特開平11−120359号公報)は、距離画像を求め、隣接し、かつ、距離値が近い距離値を同じ距離値とし、同じ距離値同士でラベリングし、ラベル毎の面積を求め、面積が一定値以下のラベルが付いた視差をノイズとして、ノイズとされた距離値をもつ画素に対してノイズ除去のためにmedian filter(中央値フィルタ)をかけ、距離画像を求めた元画像のノイズを除去し、元画像から求められる距離画像の精度を向上する手法を提案している。
【0007】
しかしながら、この手法は局所的なノイズ除去の効果はあるが、広範囲にわたって発生した画像のずれなど、広い範囲の画像エラーを除去することは困難であるという問題がある。また、上記特許文献1においては、画像内に存在するノイズ領域を判定するために、画像の区分領域単位のラベリング処理を行い、各ラベリングされた領域単位で距離を求めて、距離単位の面積算出などを行う構成であり、処理コストが大きくなることが予想される。
【先行技術文献】
【特許文献】
【0008】
【特許文献1】特開平11−120359号公報
【発明の概要】
【発明が解決しようとする課題】
【0009】
本開示は、例えば上記の状況に鑑みてなされたものであり、処理コストを低減し、より正確な距離画像(視差画像)を生成する画像処理装置、および画像処理方法、並びにプログラムを提供することを目的とする。
【課題を解決するための手段】
【0010】
本開示の第1の側面は、
被写体までの距離情報または視差情報を有する距離画像を入力し、距離画像に含まれるエラー信号を検出し、画像領域単位のエラー度合いに応じた合成係数を出力するエラー判定処理部と、
前記距離画像に対するローパスフィルタを適用してノイズ低減距離画像を生成するローパスフィルタ処理部と、
前記距離画像と、前記ノイズ低減距離画像の合成処理により補正距離画像を生成する距離画像合成部を有し、
前記距離画像合成部は、
前記エラー判定処理部の出力する画像領域単位の合成係数に従って、画像領域単位で前記距離画像と前記ノイズ低減距離画像の合成比率を設定した合成処理を実行して前記補正距離画像を生成する画像処理装置にある。
【0011】
さらに、本開示の画像処理装置の一実施態様において、前記エラー判定処理部は、前記距離画像の区分領域単位の分散値を算出する分散値計算処理部と、前記分散値計算処理部の算出した区分領域単位の分散値の非線形変換処理によって前記合成係数を算出する非線形変換処理部を有する。
【0012】
さらに、本開示の画像処理装置の一実施態様において、前記エラー判定処理部は、前記距離画像を、横(水平)方向に任意の幅に不均等または均等に分割した分割領域である短冊領域間の類似度を判別する短冊間類似度計算部と、前記短冊間類似度計算部の算出した短冊間類似度の非線形変換処理によって前記合成係数を算出する非線形変換処理部を有する。
【0013】
さらに、本開示の画像処理装置の一実施態様において、前記短冊領域は、3次元画像表示に適用する左眼用画像と右眼用画像によって構成されるステレオ画像の生成処理に際して利用される短冊の幅と同じ幅を有する。
【0014】
さらに、本開示の画像処理装置の一実施態様において、前記短冊間類似度計算部は、距離画像における1つおきの短冊領域間の距離信号の差分絶対値和(SAD)を短冊間類似度として算出する。
【0015】
さらに、本開示の画像処理装置の一実施態様において、前記エラー判定処理部は、前記距離画像を、横(水平)方向に任意の幅に不均等または均等に分割した分割領域である短冊領域間の信号値の凹凸状況を検出してエラー度合いを反映した合成係数を生成して出力する短冊間凹凸判定部を有する。
【0016】
さらに、本開示の画像処理装置の一実施態様において、前記短冊間凹凸判定部は、距離画像における3つの連続する短冊領域の距離信号の平均値を算出し、算出した3つの信号平均値から隣接する短冊間の信号平均値の差分を2つ算出して、算出した2つの差分に基づいて、短冊間凹凸の有無を判定し、該判定結果に応じた合成係数を生成して出力する。
【0017】
さらに、本開示の画像処理装置の一実施態様において、前記短冊間凹凸判定部は、3つの連続する短冊領域の距離信号の平均値を平坦にするためのオフセット値を算出して出力する。
【0018】
さらに、本開示の画像処理装置の一実施態様において、前記ローパスフィルタ処理部は、エッジ保存型ノイズ低減処理を実行する。
【0019】
さらに、本開示の画像処理装置の一実施態様において、前記ローパスフィルタ処理部は、前記オフセット値を適用して、3つの連続する短冊領域の距離信号の平均値を平坦にする補正処理を行った距離画像に対してローパスフィルタを適用してノイズ低減距離画像を生成する。
【0020】
さらに、本開示の第2の側面は、
画像処理装置において実行する画像処理方法であり、
被写体までの距離情報または視差情報を有する距離画像を入力し、距離画像に含まれるエラー信号を検出し、画像領域単位のエラー度合いに応じた合成係数を出力するエラー判定処理ステップと、
前記距離画像に対するローパスフィルタを適用してノイズ低減距離画像を生成するローパスフィルタ処理ステップと、
前記距離画像と、前記ノイズ低減距離画像の合成処理により補正距離画像を生成する距離画像合成ステップを実行し、
前記距離画像合成ステップにおいては、
前記エラー判定処理ステップにおいて出力する画像領域単位の合成係数に従って、画像領域単位で前記距離画像と前記ノイズ低減距離画像の合成比率を設定した合成処理を実行して前記補正距離画像を生成する画像処理方法にある。
【0021】
さらに、本開示の第3の側面は、
画像処理装置において画像処理を実行させるプログラムであり、
被写体までの距離情報または視差情報を有する距離画像を入力し、距離画像に含まれるエラー信号を検出し、画像領域単位のエラー度合いに応じた合成係数を出力するエラー判定処理と、
前記距離画像に対するローパスフィルタを適用してノイズ低減距離画像を生成するローパスフィルタ処理と、
前記距離画像と、前記ノイズ低減距離画像の合成処理により補正距離画像を生成する距離画像合成処理を実行させ、
前記距離画像合成処理においては、
前記エラー判定処理ステップにおいて出力する画像領域単位の合成係数に従って、画像領域単位で前記距離画像と前記ノイズ低減距離画像の合成比率を設定した合成処理を実行して前記補正距離画像を生成させるプログラムにある。
【0022】
なお、本開示のプログラムは、例えば、様々なプログラム・コードを実行可能な汎用システムに対して、コンピュータ可読な形式で提供する記憶媒体、通信媒体によって提供可能なプログラムである。このようなプログラムをコンピュータ可読な形式で提供することにより、コンピュータ・システム上でプログラムに応じた処理が実現される。
【0023】
本開示のさらに他の目的、特徴や利点は、後述する本開示の実施例や添付する図面に基づくより詳細な説明によって明らかになるであろう。なお、本明細書においてシステムとは、複数の装置の論理的集合構成であり、各構成の装置が同一筐体内にあるものには限らない。
【発明の効果】
【0024】
本開示の一実施例構成によれば、距離画像や視差画像に含まれるエラーを低減する補正処理を行う画像処理装置、方法が実現される。
具体的には、被写体までの距離情報または視差情報を有する距離画像を入力し、距離画像に含まれるエラー信号を検出し、画像領域単位のエラー度合いに応じた合成係数を出力するエラー判定処理部と、距離画像に対するローパスフィルタを適用してノイズ低減距離画像を生成するローパスフィルタ処理部と、距離画像と、ノイズ低減距離画像の合成処理により補正距離画像を生成する距離画像合成部を有し、距離画像合成部は、エラー判定処理部の出力する画像領域単位の合成係数に従って、画像領域単位で距離画像とノイズ低減距離画像の合成比率を設定した合成処理を実行して補正距離画像を生成する。
この処理によって、距離画像や視差画像に含まれるエラーを低減する補正された距離画像や視差画像を生成することが可能となる。
【図面の簡単な説明】
【0025】
【図1】立体像の知覚原理と立体像の知覚距離について説明する図である。
【図2】画像処理装置の構成例について説明する図である。
【図3】エラー信号判定処理部の一実施例について説明する図である。
【図4】距離画像に発生するエラーの一例について説明する図である。
【図5】エラー信号判定処理部における非線形変換処理部の実行する分散値から合成係数(err)を算出する処理例について説明する図である。
【図6】距離画像における短冊状のエラーについて説明する図である。
【図7】距離画像における短冊状のエラーについて説明する図である。
【図8】距離画像における短冊状のエラーが発生する理由について説明する図である。
【図9】距離画像における短冊状のエラーが発生する理由について説明する図である。
【図10】短冊単位でまとまって発生する距離画像のエラー判定処理として有効な手法について説明する図である。
【図11】エラー信号判定処理部の一実施例について説明する図である。
【図12】エラー信号判定処理部の短冊間類似度計算部の構成例について説明する図である。
【図13】エラー信号判定処理部の一実施例について説明する図である。
【図14】エラー信号判定処理部の一短冊間凹凸判定部の構成について説明する図である。
【図15】エラー信号判定処理部の一実施例について説明する図である。
【図16】エッジ保存型LPF処理部の一実施例について説明する図である。
【図17】エッジ保存型LPF処理部の一実施例について説明する図である。
【図18】短冊間凹凸補正部の構成例について説明する図である。
【図19】本開示の画像処理装置の生成する補正距離画像を適用した処理例について説明する図である。
【図20】距離画像の生成シーケンスについて説明するフローチャートを示す図である。
【図21】距離画像から得られる被写体距離を適用した被写体切り出し処理のシーケンスについて説明するフローチャートを示す図である。
【図22】距離画像の補正処理シーケレンスについて説明するフローチャートを示す図である。
【発明を実施するための形態】
【0026】
以下、図面を参照しながら本開示の画像処理装置、および画像処理方法、並びにプログラムの詳細について説明する。説明は以下の項目に従って行う。
1.立体像の知覚原理と立体像の知覚距離について
2.画像処理装置の構成例について
3.エラー信号判定処理部の第1構成例
4.短冊単位で発生するエラーについての説明
5.エラー信号判定処理部の第2構成例
6.エラー信号判定処理部の第3構成例
7.3種類のエラー信号判定処理を併用する構成例について
8.エッジ保存型LPFの構成例について
9.本開示の処理によって得られる補正された高精度な距離画像を適用するアプリケーションの例について
10.本開示の構成のまとめ
【0027】
[1.立体像の知覚原理と立体像の知覚距離について]
図1以下を参照して立体像の知覚原理と立体像の距離について説明する。
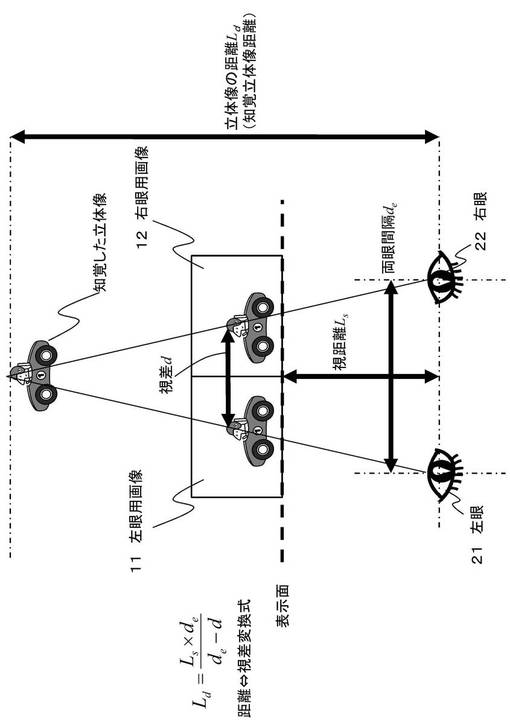
図1に示す様に、左眼用画像11を観察者の左眼21で観察し、右眼用画像12を右眼22で観察する。左眼用画像11と、右眼用画像12には、被写体距離に応じた画像の位置ずれ(視差)があり、この視差に応じて知覚距離が変更され、観察者は、立体画像として観察することができる。
【0028】
左眼用画像11と右眼用画像12における同一被写体の画素位置のずれ=視差dとし、知覚した立体像の距離:知覚立体像距離Ldとする。
この視差dと知覚立体像距離Ldの関係は、
観察者の眼の位置から表示面までの距離:視距離=Ls、
観察者の両眼の間隔=de、
としたとき、以下の(式1)で示される。
【0029】
【数1】
・・・(式1)
【0030】
このように、視距離Lsが決定されると、視差dと知覚立体像距離Ldは、一方の値が決定すれば他方の値が決定される1対1対応の相互依存データである。
すなわち、前述したように、
(a)知覚立体像距離Ld:観察者の知覚する距離(≒被写体距離)、
(b)視差d:左眼用画像と右眼用画像における同一被写体の画素位置のずれ量、
これら(a),(b)の値は、1対1対応の相互依存データである。
【0031】
以下の実施例の説明では、知覚立体像距離(被写体距離)データを用いた処理として説明するが、被写体距離データの代わりに視差データを適用した処理として実行することも可能である。
以下の説明において、距離画像は、被写体までの距離情報または視差情報を有する画像であるものとして説明する。
【0032】
[2.画像処理装置の構成例について]
図2は、本開示の画像処理装置の基本構成例を示す図である。距離画像110は、ステレオ視可能な左眼用画像と右眼用画像から求められる。距離画像は、撮影された画像上の被写体距離(知覚立体像距離=観察者や撮影カメラからの距離)を例えば白〜黒の濃淡画像情報として示した画像である。
【0033】
なお、前述したように被写体距離は、左眼用画像と右眼用画像における対応画素位置のずれ量に相当する視差から求められる。したがって距離に応じた濃淡情報は、被写体距離を示すと同時に視差量も示しており、距離画像は視差画像とも呼ばれる。
すなわち、距離画像と視差画像は等価な画像データである。
以下の実施例では、画素単位で被写体までの距離に応じたデータ(距離信号)を有する距離画像を適用した実施例として説明するが、距離画像の代わりに、画素単位で視差信号を有する視差画像を適用した処理として実行することも可能である。
従って、以下の説明において、距離画像は、被写体までの距離情報または視差情報を有する画像として説明する。
【0034】
図2に示すように、距離画像110は、
エラー信号判定処理部120、
距離画像合成部140、
エッジ保存型LPF処理部160、
これらに入力される。
【0035】
エラー信号判定処理部120は、距離画像110を入力し、距離画像110に含まれる被写体距離を示す距離信号(=視差信号)を解析して、距離信号(視差信号)にエラーが発生しているか否かを判定しエラーの度合いを数値で出力する。
【0036】
エラー信号判定処理部120において実行するエラー判定処理としては、例えば以下の値のいずれか、または複数の値を算出して、これらの算出値に基づくエラー判定処理を行う。
(1)距離画像の所定領域単位のばらつき度(分散値)、
(2)距離画像の短冊間の類似度を示す値、
(3)距離画像の短冊間の凸凹度を示す値、
なお、上記(2)、(3)において利用する短冊とは、距離画像110を横(水平)方向に任意の幅に不均等または均等に分割した分割領域を意味する。
これらの処理については後段で詳細に説明する。
【0037】
図2に示すように、距離画像110は、エッジ保存型LPF処理部160に入力される。
エッジ保存型LPF処理部160は、距離画像110に含まれるノイズを除去するフィルタ適用処理を行う。エッジ保存型のローパスフィルタ(LPF:Low Pass Filter)を適用したフィルタ処理を施す。
このLPF処理は、一般的に知られているエッジ保存型LPFであればよく、例えば、εフィルタやバイラテラルフィルタ(Bilateral Filter)等が用いられる。
【0038】
エッジ保存型LPF処理部160において、LPF処理された距離画像は、距離画像合成部140において、元の距離画像110と合成する。
合成処理は、エラー信号判定処理部120から出力される領域単位のエラー度合いを示す数値に応じた合成処理を実行する。
【0039】
なお、エラー信号判定処理部120から出力される領域単位のエラー度合いを示す数値は、
エラー度合い=0.0〜1.0
とする。
0.0がエラー度合いが最も弱く、1.0がエラー度合いがもっとも強いことを示す。
【0040】
距離画像合成部140は、エラー信号判定処理部120から出力される領域単位のエラー度合いを合成係数(err)として適用して、以下の(式2)に従った合成処理を実行する。
【0041】
【数2】
・・・(式2)
【0042】
ただし、
Dout:合成後の補正距離画像150の画素値(距離信号)、
Din:入力した元の距離画像110の画素値(距離信号)、
err:エラー度合い(=合成係数)
DinLPFed:エッジ保存型LPF処理部160においてLPF処理された距離画像
【0043】
上記(式2)は、入力する距離画像110のエラー度合いの高い画素領域については、エッジ保存型LPF処理部160においてLPF処理された距離画像の合成比率(ブレンド比率)を高く設定し、入力する距離画像110のエラー度合いの低い画素領域については、入力する距離画像の合成比率(ブレンド比率)を高く設定した合成処理(ブレンド処理)によって、補正距離画像150を生成する処理を示している。
【0044】
距離画像合成部140は、上記(式2)にしたがって、LPF処理された距離画像と元の距離画像110の合成処理を実行する。
合成処理された距離画像は補正距離画像150として出力される。
【0045】
[3.エラー信号判定処理部の第1構成例]
図3にエラー信号判定処理部120の一例を示す。
図3に示すように、エラー信号判定処理部120は、
分散値計算処理部121、
非線形変換処理部122、
を有する。
【0046】
エラー信号判定処理部120に入力された距離画像110は、分散値計算処理部121において、まず、距離画像を予め規定したN×M画素の区分領域に分割し、区分領域単位で画素値の分散値を計算する。
なお、前述したように、距離画像は被写体距離に応じた画素値を有する画像である。
【0047】
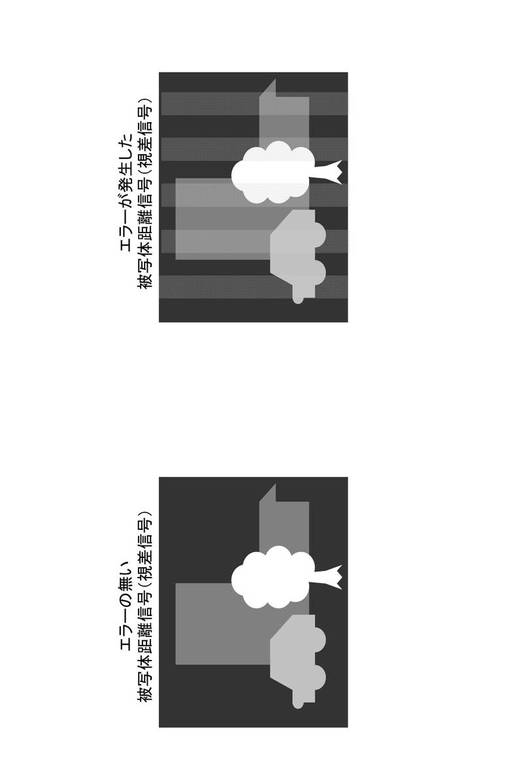
図4に、距離画像にエラーのない場合と、エラーのある場合の画像例を示す。
(a)エラーのない距離画像、
(b)エラーが発生した距離画像、
これら2つの画像の例を示している。
【0048】
図に示すように、(b)エラーが発生した距離画像には、ところどころに、周囲とは大きく異なる画素値を持つ領域(図に示す黒い線)が発生している。
このように、エラー発生領域では距離画像の画素値(距離信号)のばらつき度合いが大きくなる。この例ではばらつき度合いをエラー信号の判定に用いるため分散値を利用する。
【0049】
ただし、この構成においては、距離画像における領域単位のばらつき度合いを求めることができればよいので、ばらつき度合いと相関がある値であれば分散値に限定されず、その他の指標値を利用してもよい。例えば、区分領域単位の画素値の標準偏差を利用する構成としてもよい。
【0050】
図3に示す分散値計算処理部121において求められた区分領域(N×M画素)単位の分散値は非線形変換処理部122に入力される。
非線形変換処理部122は、距離画像の区分領域単位のばらつき度合いを示す分散値を、距離画像合成部140で用いる合成係数(err)に変換する処理を行う。
【0051】
図5は、非線形変換処理部122において実行する非線形変換処理の一例を示している。横軸が、分散値計算処理部121からの入力信号(分散値)である。縦軸が、非線形変換処理部122における非線形変換処理後の出力、すなわち合成係数(err)を示している。
【0052】
非線形変換処理部122は、入力された分散値(In)を、予め規定した関数f(x)により変換して、合成係数[err](Out)を出力する。すなわち、
Out=f(In)
とする。
この変換処理に適用する関数f(x)は、様々な関数が利用可能である。
関数f(x)の一例としては、例えば、以下の(式3)に示す指数関数が適用できる。
f(x)=xβ ・・・(式3)
【0053】
非線形変換処理部122は、上記の(式3)に示されるような指数関数を適用して、入力された分散値(In)の非線形変換処理を行い、例えば図5に示すような入力分散値(In)から出力する合成係数(err)を生成して出力する。
【0054】
なお、上記(式3)において、βは予め設定した係数であり、様々な値に設定可能である。また、非線形変換処理部122における変換関数は、指数関数に限定するものではなく、また線形的な変換を施しても構わない。
【0055】
[4.短冊単位で発生するエラーについての説明]
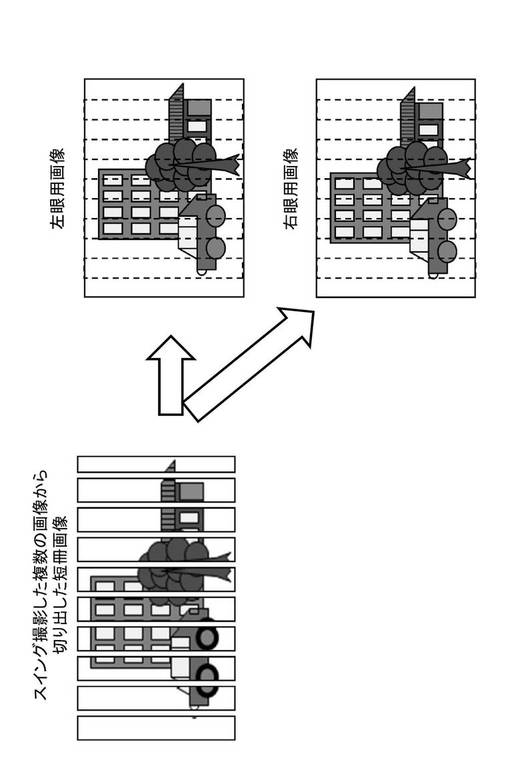
図6に、距離画像に発生する別のエラー例を示す。この例では、短冊状に距離信号のエラーが発生している。
このような短冊単位のエラーは、カメラを水平方向に移動(スイング)させて連続撮影した複数の撮影画像を利用して、各画像から短冊城に切り分けた短冊画像を再合成して、D画像表示に適用する左眼用画像と右眼用画像を生成する処理を行った場合に発生しやすい。
この様なエラーが発生する左眼用画像と右眼用画像の生成例を図7に示す。図7に示す様に、水平方向に移動(スイング)させて連続撮影した複数の撮影画像から切り出した短冊画像を再度合成することで、左眼用画像と右眼用画像を生成する手法である。
このような3D画像生成処理を行うと、図6に示す様な短冊状にオフセットが付いた様なエラーが発生する場合がある。
このようなエラーが発生する理由について、図8、図9を参照して説明する。
図7に示すような、短冊状の画像を左眼用画像と右眼用画像とに合成するステレオ画像の撮影手法では、左眼用画像を構築するための短冊と、右眼用画像を構築するため、左眼用画像と右眼用画像とで異なる撮影位置、すなわち異なる撮影時刻の撮影画像から切り出した短冊を利用している。
【0056】
例えば、図8に示すような画像300に対応する(a)左眼用画像を構築するための短冊画像301と、(b)右眼用画像を構築するための短冊画像302は、図に示すような撮影時間t,t+1,t+2,・・・の各時間に連続撮影された複数の画像から切り出した短冊画像の合成処理によって生成される。
【0057】
図8に示すように、時刻tからt+4にわたって撮影された複数の画像から、短冊を切り出して合成することで、(a)左眼用画像と(b)右眼用画像が生成される。
【0058】
これらの各短冊領域の画像は、例えば撮影者が手でカメラを水平方向にスイングさせて撮影される画像である。この撮影処理に際して、水平方向にのみ正確に移動されれば問題ないが、多くの場合、カメラの垂直方向の移動や回転などが発生してしまう。
【0059】
例えば、時刻t+1とt+2において、被写体方向軸を中心とした回転変動がカメラに加わったとする。
例えば、(a)左眼用画像を構成する短冊画像303と、(b)右眼用画像を構成する短冊画像304の短冊が回転変動により回転して撮影されてしまった短冊を示す。
これらの短冊画像303,304から明らかなように、回転変動の結果、同じ被写体が異なる角度で写されてしまう現象が発生する。
【0060】
このような回転変動が発生した短冊を合成した結果を、図9に示すように、左眼用画像321,右眼用画像322として利用する。
これら、左眼用画像321と,右眼用画像322から求められた距離画像を距離画像323として図9に示す。
【0061】
一般的に、距離画像は、左眼用画像と右眼用画像上の、同じ被写体間の視差を求めることで、被写体までの距離を求める。
図9では、例えば短冊画像32、325、328で示した左眼用画像の短冊と右眼用画像の短冊間の視差から距離を求めることになる。
【0062】
本例では、時刻t+1とt+2において、被写体方向軸を中心とした回転変動がカメラに加わっているので、短冊324の左眼用画像の短冊と、右眼用画像の短冊の組みに着目する。
これらの、短冊の組みにおいて、左眼用画像の短冊では正常、右眼用画像の短冊では回転変動が加わっている。
【0063】
この結果、距離画像323において、短冊の組み324から求められた距離画像の短冊領域326はエラーが含まれた距離画像となる。
また、短冊325の組みでは、左眼用画像の短冊と右眼用画像の短冊の両方に回転変動が加わっており、両方の短冊に同じ回転変動が加わるため、求められる距離画像の短冊領域327は正しい距離画像となる。
【0064】
さらに、短冊328の組みでは、短冊324と同様の理由で、距離画像の短冊領域329はエラーが含まれた距離画像となる。
このように、距離画像には、被写体方向軸を中心とした回転変動がカメラに加わった場合の距離画像のエラーは、距離画像の短冊領域の一つおきに発生する。
【0065】
この様な短冊単位のエラー判定には、前述の図3で説明した画素領域単位のばらつきを求める手法、すなわち、距離画像のN×M画素単位の画素値の分散値を算出して、分散値に基づいてエラーを判定する手法は適用できない。
【0066】
[5.エラー信号判定処理部の第2構成例]
上述した短冊単位でまとまって発生する距離画像のエラー判定処理として有効な手法について、以下説明する。
図10を参照して、このエラー判定手法の一例について概略を説明する。
【0067】
前述した、短冊上に撮影された画像を用いてのステレオ画像の生成では、距離画像に含まれる距離信号のエラーは短冊内ではなく短冊間で発生する。そこで、距離画像をステレオ画像としての左眼用画像と右眼用画像の画像生成に適用した短冊と同じ位置で分割する。もちろん、これは、仮想的な分割でもかまわない。
【0068】
続いて、距離画像に含まれる距離信号のエラーを検出する水平方向の処理ラインを設定する。
短冊間にエラーが発生するので、処理ラインのN番目の短冊とM番目の短冊を比較することによりその短冊にエラーが発生しているか否かを判定する。本手法では、判定手法として水平の処理ラインのN番目の短冊とM番目の短冊間の類似度を求め、類似度が大きければエラーが発生していると判定する。
【0069】
このエラー判定手法を用いたエラー信号判定処理部120の構成例を、図11に示す。
図11に示すエラー信号判定処理部120は、先に説明した図2の画像処理装置のエラー信号判定処理部120の一構成例を示し、特に短冊単位のエラーの検出に有効な構成を持つ。
【0070】
図11に示すエラー信号判定処理部120の構成と処理について説明する。
エラー信号判定処理部120は、図11に示すように、
短冊間類似度計算部123、
非線形変換処理部124、
を有する。
【0071】
エラー信号判定処理部120に入力された距離画像110は、短冊間類似度計算部123において、図10を参照して説明した水平方向の処理ライン単位に任意のN番目の短冊とM番目の短冊間とで類似度を計算する。
【0072】
図12を参照して、短冊間類似度計算部123の詳細構成と処理について説明する。
短冊間類似度計算部123には、距離画像110の距離信号が、水平方向の走査ラインに従って入力される。
走査ラインに従って入力された距離信号は処理ライン単位に画像バッファA125、画像バッファB126、画像バッファC127に格納される。それぞれのバッファの幅は短冊と等しくなっている。
【0073】
各パッファの格納データは、例えば図12に示すように、図12に示す距離画像401の短冊単位の距離画像が格納される。すなわち、
画像バッファA125には、N番目の短冊の距離信号からなる距離画像データ、
画像バッファB126には、N+1番目の短冊の距離信号からなる距離画像データ、
画像バッファA127には、N+2番目の短冊の距離信号からなる距離画像データ、
これらの距離信号データが格納される。
【0074】
SAD(差分絶対値和:Sum of Absolute Difference)計算部128は、画像バッファA125と画像バッファC127とに格納された、同一の水平ラインの1つおきの短冊間の距離信号の差分絶対値和を算出する。
【0075】
SAD計算部128は、1つおきの短冊間のSAD(差分絶対値和)RSADを以下の(式4)に従って算出する。
【0076】
【数3】
・・・(式4)
【0077】
なお、
DA(i):画像バッファA125の位置iの距離信号
DC(i):画像バッファC127の位置iの距離信号
RSAD:SAD(差普選絶対値和)
N:画像バッファA125のサイズ
である。
【0078】
この差分絶対値和は、各短冊間の類似度を示す。SAD計算部128の算出した差分絶対値和(SAD値)は、非線形変換処理部124に出力される。
非線形変換処理部124は、先の実施例で説明した例えば図5に示す非線形変換関数f(x)を適用して、上記のSAD(差分絶対値和)RSADの非線形変換処理を実行して、距離画像合成部140に出力する合成係数(err)を生成して出力する。
【0079】
なお、本実施例では、各短冊間の信号の類似度を示す指標値としてSAD(差分絶対値和)を適用した処理例について説明したが、他の類似度を求めるアルゴリズムを用いる構成としてもよい。例えば、SSD(Sum of Squared Difference)の他、正規化相互相関等(Normalized Cross―Correlation)等を用いることも可能である。
【0080】
また、図12に示す構成では、バッファサイズを短冊幅に合わせ、3つのバッファを用いることにより、N番目の短冊とN+2番目の短冊間とで類似度を計算しているが、この構成は元のステレオ画像をどのように短冊から生成しているかに依存するため、この構成のかぎりではない。
例えば、短冊の幅が不均等である場合は、短冊境界情報の入力と、距離信号から比較する短冊の範囲内の距離信号を取得する手段とで、短冊幅に合わせて類似度を求めることができるように構成する必要がある。
【0081】
[6.エラー信号判定処理部の第3構成例]
次に、図13以下を参照して、図6〜図9を参照して説明した短冊単位のエラー判定処理のもう1つの処理例について説明する。
図6〜図9を参照して説明した短冊単位でエラーが発生した場合、短冊単位の距離信号の平均値に注目すると、平均値が短冊単位で大きく変化する。
先に図8、図9を参照して説明したように、エラーの発生した短冊は1つおきに設定される可能性が高い。
【0082】
従って、エラーの発生短冊を含む距離画像は、短冊の距離信号の平均値が1つおきに大きく異なる傾向がある。すなわち、短冊間で距離信号の平均値が凸凹している。そこで、短冊単位に視差が凸凹していることを検出した場合にエラーありと判定することができる。
【0083】
この手法を用いた、エラー信号判定処理部120の一例を、図13に示す。
図13に示すエラー信号判定処理部120は、先に説明した図2の画像処理装置のエラー信号判定処理部120の一構成例を示し、特に短冊単位のエラーの検出に有効な構成を持つ。
【0084】
本処理例におけるエラー信号判定処理部120は、図13に示すように、
短冊間凹凸判定部129、
を有する。
【0085】
エラー信号判定処理部120に入力された距離画像110は、短冊間凹凸判定部129において、先に図10を参照して説明した水平方向の処理ラインに沿って、N番目とN+1番目とN+2番目の短冊間で、各短冊の距離信号の平均値に凹凸が存在するか否かを判定する。
【0086】
図14を参照して、短冊間凹凸判定部129の詳細構成と処理について説明する。
エラー信号判定処理部120に入力された距離画像110は、処理ライン単位に画像バッファD131、画像バッファE132、画像バッファF133に送られて格納される。それぞれのバッファの幅は短冊と等しくなっている。
【0087】
各パッファの格納データは、例えば図14に示すように、図14に示す距離画像402の短冊単位の距離画像が格納される。すなわち、
画像バッファD131には、N番目の短冊の距離信号からなる距離画像データ、
画像バッファE132には、N+1番目の短冊の距離信号からなる距離画像データ、
画像バッファF133には、N+2番目の短冊の距離信号からなる距離画像データ、
これらの距離信号データが格納される。
【0088】
各バッファに格納された距離画像データに基づいて、N番目短冊の平均値計算器134、N+1番目短冊の平均値計算器135、N+2番目短冊の平均値計算器136において、N〜N+2番目の各短冊領域の短冊毎の平均値が計算される。
【0089】
凹凸判定・オフセット値算出処理部137では、
N番目短冊と、N+1番目短冊と、N+2番目短冊の平均値の関係が、
(1)N番目の平均値<N+1番目の平均値、かつ、N+1番目の平均値>N+2番目の平均値、
(2)N番目の平均値>N+1番目の平均値、かつ、N+1番目の平均値<N+2番目の平均値、
上記(1)または(2)のいずれかが成立したか否か判定する。
【0090】
上記の(1)または(2)が成立していれば、エラーと判定される合成係数(err)、本実施例ではerr=1.0を距離画像合成部140に出力する。
上記の(1)、(2)のいずれも成立していなければ、エラーではないと判定される合成係数(err)、本実施例ではerr=0.0を距離画像合成部140に出力する。
【0091】
なお、図14に示す構成では、バッファサイズを短冊幅に合わせ、3つのバッファを用いることにより、N番目の短冊とN+1番目の短冊とN+2番目の短冊の平均値を求め、凹凸の判定を行っているが、この構成は元のステレオ画像をどのように短冊から生成しているかに依存するため、この構成のかぎりではない。
【0092】
例えば、短冊の幅が不均等である場合は、短冊境界情報の入力と、距離信号から比較する短冊の範囲内の距離信号を取得する手段とで、短冊幅に合わせて類似度を求めることができるように構成する必要がある。
【0093】
続いて、凹凸判定・オフセット値算出処理部137で求めるオフセット値について説明する。このオフセット値の使用例については後述する。
短冊間の距離信号の平均値が凹凸であることが検出された場合、短冊の平均値を平坦にすることでエラー補正が可能であると考えられる。
【0094】
そこで、本実施例では、N番目短冊とN+1番目短冊とN+2番目短冊の距離信号の平均値が平坦になるように、以下の(式5)に従って距離信号のオフセット値を算出する。
【0095】
【数4】
・・・・・(式5)
【0096】
ただし、
AveN:N番目短冊の距離信号の平均値
AveN+1:N+1番目短冊の距離信号の平均値
AveN+2:N+2番目短冊の距離信号の平均値
【0097】
なお、上記(式5)において、(×1/2)の項は、オフセット値の効果の強弱を決定する調整パラメータであり、効果をみて、最適な値に変更するといった調整をおこなうことが好ましい。上記式に従って求められたオフセット値は、後述の短冊間凹凸補正部170の補正処理において用いられる。
【0098】
[7.3種類のエラー信号判定処理を併用する構成例について]
これまで、3種類のエラー信号判定処理の例を示したが、これらを全て使用することも可能である。そのエラー信号判定処理部120の構成例を、図15に示す。
【0099】
図15に示すエラー信号判定処理部120は、
(a)[x.エラー信号判定処理部の第1構成例]において、図3を参照して説明した分散値計算処理部121と非線形変換処理部122、
(b)[x.エラー信号判定処理部の第2構成例]において、図11を参照して説明した短冊間類似度計算部123と非線形変換処理部124、
(c)[x.エラー信号判定処理部の第3構成例]において、図13を参照して説明した短冊間凹凸判定部129、
これらを並列に設定した構成を持つ。
【0100】
本実施例では、上記(a)〜(c)のエラー判定処理の出力を0.0〜1.0の範囲とし、1.0の時にエラー度合いがもっとも強いとしているので、それぞれの出力の乗算を、乗算部501,502において算出して、この算出結果をエラー判定結果として、これを合成係数(err)として距離画像合成部140に出力することを可能としている。
なお、これ以外の構成も可能であり、例えばそれぞれのエラー度合いに任意の係数をかけ、エラー度合いに重みをつけて入力距離信号のエラー特性に合わせる構成としてもよい。
【0101】
[8.エッジ保存型LPFの構成例について]
先に、図2を参照して説明したように、距離画像合成部140において、合成係数(err)に応じて合成される処理対象画像は、
(1)入力する距離画像110(=Din)、
(2)エッジ保存型LPF処理部の出力するフィルタ処理画像(=DinLPFed)、
これらの2つの画像である。
【0102】
エッジ保存型LPF処理部160では、距離画像110に含まれるノイズ低減を目的としたエッジ保存型のフィルタ適用処理が実行される。
この処理に適用されるフィルタの一例として、εフィルタの構成例を図16に示す。
εフィルタは、入力画素値をx(n)、出力画素値をy(n)としたとき、以下の(式6)によって定義されるフィルタである。
【0103】
【数5】
・・・・・(式6)
【0104】
ここで、f()は、以下の(式7)で定義される関数である。
【0105】
【数6】
・・・・・(式7)
【0106】
上記(式7)中のαは、
α=0またはα=ε等が定義可能である。
また、
上記(式6)に示すakは非再帰型線形低域型フィルタ(FIRフィルタ)のフィルタ係数であり、直流成分を保存するために総和が1.0となるように設定する。
【0107】
エッジ保存型LPF処理部160において適用されるεフィルタは、図16に示す構成を有する。図16に示す例は、N×2+1TAPのεフィルタを構成するブロック図であり、一般的なFIRフィルタの構成をとる。
εフィルタの構成は、遅延器Dで保持される距離画像の画素値(距離信号)を、k=0の中央の画素値(距離信号)との差をとり、関数ak×関数f(x)の演算処理を実行し、タップ長分の合計をとる構成である。
【0108】
エッジ保存型LPF処理160の別の構成例を図17に示す。
この図17に示す構成は、先に、図13、図14を参照して説明した短冊間凹凸判定部129を有する構成において適用可能な構成である。
図17に示すように、エッジ保存型LPF処理160は、入力として、距離画像110ではなく、短冊間凹凸判定部129で求められたオフセット値に従って、短冊間凹凸補正部170で補正した距離画像を入力する。
【0109】
短冊間凹凸補正部170の構成例を図18に示す。
短冊間凹凸補正部170は、距離画像の距離信号を水平ライン単位で順次入力し、さらに、短冊間凹凸判定部120の生成したオフセット値を入力する。
【0110】
入力された距離信号は処理ライン単位に画像バッファG171、画像バッファH172に送られる。それぞれのバッファの幅は、先に図14を参照して説明した短冊間凹凸判定部129の画像バッファD131、画像バッファE132と同じ幅となっており、短冊間凹凸判定部で求められた補正値が同じ短冊上の距離信号へ反映される様に構成されている。
【0111】
画像バッファH172より出力された短冊単位の距離画像の距離信号に対して、短冊間凹凸判定部129で求めたオフセット値、すなわち、先に説明した(式5)に従って算出したオフセット値を加算したオフセット加算距離画像を生成して、エッジ保存型LPF処理部160へ出力する。
エッジ保存型LPF処理部160は、このオフセット加算距離画像に対して、エッジ保存型のノイズ低減処理フィルタを摘要してノイズ低減処理を行う。このオフセット加算距離画像の生成処理を加えることにより、ノイズ低減効果が高くなり、その後の合成処理におけるエラー信号の補正効果もより高くなる。
【0112】
[9.本開示の処理によって得られる補正された高精度な距離画像を適用するアプリケーションの例について]
次に、本開示の処理によって得られる補正された高精度な距離画像あるいは視差画像を摘要するアプリケーションの例について説明する。なお、距離画像(視差画像)は、デジタルカメラ、カムコーダ、携帯電話、ゲーム機器、コンテンツ編集機、PC、TV等の機器の様々なアプリケーションでも適用可能である。以下では、その一部の例について説明する。
【0113】
例として、図19(A)に示す様な左眼用画像と右眼用画像を入力し、図19(B)に示す距離画像を求める。
次に、この(B)距離画像の距離情報を元に被写体と背景を分離し、図19(C)の様に被写体だけを出力するアプリケーションについて説明する。
【0114】
まず、距離画像(=視差画像)を求める処理シーケンスについて、図20に示すフローチャートを参照して説明する。
この処理は、例えばPC等の画像処理装置におけるデータ処理部、すなわち予め規定されたシーケンスに従ったプログラムを実行するCPU等を備えたデータ処理部において実行可能である。
【0115】
まず、ステップS101において、図19(A)に示すような左眼用画像と右眼用画像によって構成されるステレオ画像を入力する。次に、ステップS102において、入力されたステレオ画像、すなわち左眼用画像と右眼用画像を適用した視差検出処理を実行し、検出された視差情報に従った被写体距離の算出を実行する。視差および被写体距離は、例えば左眼用画像、あるいは右眼用画像の画素単位で算出する。
次に、ステップS103において、画素単位で算出した距離信号を反映した濃淡等の画素値信号を設定した距離画像を生成する。
【0116】
続いて、生成した距離画像を利用して、被写体を分離する処理について、図21に示すフローチャートを参照して説明する。
すなわち、図19(B)に示す距離画像を利用して、図19(C)に示す被写体分離画像を生成する処理である。
この処理も、例えばPC等の画像処理装置におけるデータ処理部、すなわち予め規定されたシーケンスに従ったプログラムを実行するCPU等を備えたデータ処理部において実行可能である。
【0117】
ステップS111、S112において、左(または右)眼用画像と、図20を参照して説明したシーケンスによって求められた距離画像を入力する。
【0118】
次に、ステップS113において、左(または右)眼用画像の画素単位で、その画素の距離を距離画像から取得する。
次に、ステップS114において、画素単位の距離と、予め設定したしきい値(th)とを比較する。
【0119】
ステップS114において、距離がしきい値(th)以下と判断された画素領域については、所定距離より手前にある被写体領域であると判断し、ステップS115に進み、画素を出力する。
一方、ステップS114において、距離がしきい値(th)より大きいと判断された画素領域については、所定距離より奥にある被写体領域であると判断し、ステップS116に進み、透明画素(画素値の設定なし、あるいは白または黒等の一色の画素値)を出力する。
ステップS117においてすべての画素について処理が終了したか判断し、全ての画素について処理が終了したのであれば、処理を終了する。
【0120】
この処理に従えば、例えば、図19(B)に示すように、距離画像にエラーが含まれていなければ、図19(C)に示すような特定の被写体を切り出すことができる。
しかしながら、通常は図19(D)に示す距離画像のように、距離画像にエラーが含まれており、このようなエラーを含む距離画像を摘要すると、図21に示すフローに従った処理を実行しても、例えば、図19(E)に示すような被写体の正しい切り出しができない。
【0121】
しかし、図2以下を参照して説明した本開示の画像処理装置により、エラーの含まれる距離画像の補正を行い、正確な距離画像(=視差画像)を求め、補正された距離画像を適用して図21に示すフローを実行することで、図19(C)に示すように特定の被写体を正確に切り出すことが可能となる。
【0122】
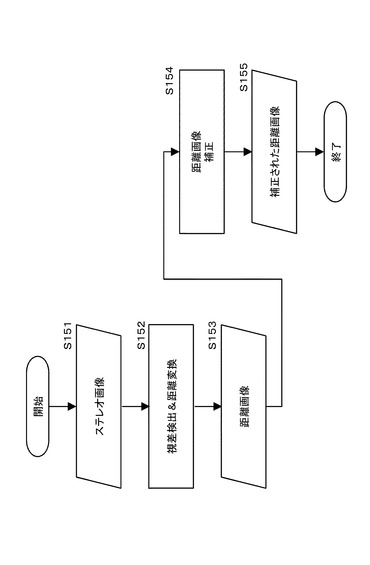
本開示の画像処理装置によって実行するエラーの含まれる距離画像の補正処理のシーケンスについて図22に示すフローチャートを参照して説明する。
【0123】
まず、ステップS151において、図19(A)に示すような左眼用画像と右眼用画像によって構成されるステレオ画像を入力する。次に、ステップS152において、入力されたステレオ画像、すなわち左眼用画像と右眼用画像を適用した視差検出処理を実行し、検出された視差情報に従った被写体距離の算出を実行する。視差および被写体距離は、例えば左眼用画像、あるいは右眼用画像の画素単位で算出する。
次に、ステップS153において、画素単位で算出した距離信号を反映した濃淡等の画素値信号を設定した距離画像を生成する。
この距離画像にはエラーが含まれている可能性がある。
【0124】
なお、先に図2を参照して説明した構成では、すでに生成された距離画像を入力して補正処理を実行する構成として説明したが、図22に示すフローのステップS151〜S153の処理を行う距離画像生成部を有する構成としてもよい。この場合、画像処理装置には、距離画像は入力されず、ステレオ画像としての左眼用画像と右眼用画像のみが入力される。
【0125】
ステップS154の距離画像補正処理は、図2〜図18を参照して説明した画像処理装置において実行する距離画像補正処理である。
この距離画像補正処理によって、距離画像に含まれるエラーは除去または減少し、高精度な補正された距離画像が生成される。
ステップS155において、補正された距離画像を出力する。
【0126】
この補正された距離画像を摘要して、先に説明した図21に示すフローに従った処理を実行することで、距離に応じた被写体切り出し処理をより正確に実行することが可能となる。
【0127】
[10.本開示の構成のまとめ]
以上、特定の実施例を参照しながら、本開示の実施例について詳解してきた。しかしながら、本開示の要旨を逸脱しない範囲で当業者が実施例の修正や代用を成し得ることは自明である。すなわち、例示という形態で本発明を開示してきたのであり、限定的に解釈されるべきではない。本開示の要旨を判断するためには、特許請求の範囲の欄を参酌すべきである。
【0128】
なお、本明細書において開示した技術は、以下のような構成をとることができる。
(1) 被写体までの距離情報または視差情報を有する距離画像を入力し、距離画像に含まれるエラー信号を検出し、画像領域単位のエラー度合いに応じた合成係数を出力するエラー判定処理部と、
前記距離画像に対するローパスフィルタを適用してノイズ低減距離画像を生成するローパスフィルタ処理部と、
前記距離画像と、前記ノイズ低減距離画像の合成処理により補正距離画像を生成する距離画像合成部を有し、
前記距離画像合成部は、
前記エラー判定処理部の出力する画像領域単位の合成係数に従って、画像領域単位で前記距離画像と前記ノイズ低減距離画像の合成比率を設定した合成処理を実行して前記補正距離画像を生成する画像処理装置。
【0129】
(2)前記エラー判定処理部は、前記距離画像の区分領域単位の分散値を算出する分散値計算処理部と、前記分散値計算処理部の算出した区分領域単位の分散値の非線形変換処理によって前記合成係数を算出する非線形変換処理部を有する前記(1)に記載の画像処理装置。
(3)前記エラー判定処理部は、前記距離画像を、横(水平)方向に任意の幅に不均等または均等に分割した分割領域である短冊領域間の類似度を判別する短冊間類似度計算部と、前記短冊間類似度計算部の算出した短冊間類似度の非線形変換処理によって前記合成係数を算出する非線形変換処理部を有する前記(1)または(2)に記載の画像処理装置。
【0130】
(4)前記短冊領域は、3次元画像表示に適用する左眼用画像と右眼用画像によって構成されるステレオ画像の生成処理に際して利用される短冊の幅と同じ幅を有する前記(3)に記載の画像処理装置。
(5)前記短冊間類似度計算部は、距離画像における1つおきの短冊領域間の距離信号の差分絶対値和(SAD)を短冊間類似度として算出する前記(3)または(4)に記載の画像処理装置。
【0131】
(6)前記エラー判定処理部は、前記距離画像を、横(水平)方向に任意の幅に不均等または均等に分割した分割領域である短冊領域間の信号値の凹凸状況を検出してエラー度合いを反映した合成係数を生成して出力する短冊間凹凸判定部を有する前記(1)に記載の画像処理装置。
(7)前記短冊間凹凸判定部は、距離画像における3つの連続する短冊領域の距離信号の平均値を算出し、算出した3つの信号平均値から隣接する短冊間の信号平均値の差分を2つ算出して、算出した2つの差分に基づいて、短冊間凹凸の有無を判定し、該判定結果に応じた合成係数を生成して出力する前記(6)に記載の画像処理装置。
(8)前記短冊間凹凸判定部は、3つの連続する短冊領域の距離信号の平均値を平坦にするためのオフセット値を算出して出力する前記(6)または(7)に記載の画像処理装置。
【0132】
(9)前記ローパスフィルタ処理部は、エッジ保存型ノイズ低減処理を実行する前記(1)〜(8)いずれかに記載の画像処理装置。
(10)前記ローパスフィルタ処理部は、前記オフセット値を適用して、3つの連続する短冊領域の距離信号の平均値を平坦にする補正処理を行った距離画像に対してローパスフィルタを適用してノイズ低減距離画像を生成する前記(1)〜(9)いずれかに記載の画像処理装置。
【0133】
さらに、上記した装置等において実行する処理の方法や、処理を実行させるプログラムも本開示の構成に含まれる。
【0134】
また、明細書中において説明した一連の処理はハードウェア、またはソフトウェア、あるいは両者の複合構成によって実行することが可能である。ソフトウェアによる処理を実行する場合は、処理シーケンスを記録したプログラムを、専用のハードウェアに組み込まれたコンピュータ内のメモリにインストールして実行させるか、あるいは、各種処理が実行可能な汎用コンピュータにプログラムをインストールして実行させることが可能である。例えば、プログラムは記録媒体に予め記録しておくことができる。記録媒体からコンピュータにインストールする他、LAN(Local Area Network)、インターネットといったネットワークを介してプログラムを受信し、内蔵するハードディスク等の記録媒体にインストールすることができる。
【0135】
なお、明細書に記載された各種の処理は、記載に従って時系列に実行されるのみならず、処理を実行する装置の処理能力あるいは必要に応じて並列的にあるいは個別に実行されてもよい。また、本明細書においてシステムとは、複数の装置の論理的集合構成であり、各構成の装置が同一筐体内にあるものには限らない。
【産業上の利用可能性】
【0136】
以上、説明したように、本開示の一実施例構成によれば、距離画像や視差画像に含まれるエラーを低減する補正処理を行う画像処理装置、方法が実現される。
具体的には、被写体までの距離情報または視差情報を有する距離画像を入力し、距離画像に含まれるエラー信号を検出し、画像領域単位のエラー度合いに応じた合成係数を出力するエラー判定処理部と、距離画像に対するローパスフィルタを適用してノイズ低減距離画像を生成するローパスフィルタ処理部と、距離画像と、ノイズ低減距離画像の合成処理により補正距離画像を生成する距離画像合成部を有し、距離画像合成部は、エラー判定処理部の出力する画像領域単位の合成係数に従って、画像領域単位で距離画像とノイズ低減距離画像の合成比率を設定した合成処理を実行して補正距離画像を生成する。
この処理によって、距離画像や視差画像に含まれるエラーを低減する補正された距離画像や視差画像を生成することが可能となる。
【符号の説明】
【0137】
11 左眼用画像
12 右眼用画像
21 左眼
22 右眼
110 距離画像
120 エラー信号判定処理部
121 分散値計算処理部
122 非線形変換処理部
123 短冊間類似度計算部
124 非線形変換処理部
125〜127 画像バッファ
128 SAD計算部
129 短冊間凹凸無判定部
131〜133 画像バッファ
134〜136 平均値計算器
137 凹凸判定・オフセット値算出処理部
140 距離画像合成部
150 補正距離画像
160 エッジ保存型LPF処理部
【特許請求の範囲】
【請求項1】
被写体までの距離情報または視差情報を有する距離画像を入力し、距離画像に含まれるエラー信号を検出し、画像領域単位のエラー度合いに応じた合成係数を出力するエラー判定処理部と、
前記距離画像に対するローパスフィルタを適用してノイズ低減距離画像を生成するローパスフィルタ処理部と、
前記距離画像と、前記ノイズ低減距離画像の合成処理により補正距離画像を生成する距離画像合成部を有し、
前記距離画像合成部は、
前記エラー判定処理部の出力する画像領域単位の合成係数に従って、画像領域単位で前記距離画像と前記ノイズ低減距離画像の合成比率を設定した合成処理を実行して前記補正距離画像を生成する画像処理装置。
【請求項2】
前記エラー判定処理部は、
前記距離画像の区分領域単位の分散値を算出する分散値計算処理部と、
前記分散値計算処理部の算出した区分領域単位の分散値の非線形変換処理によって前記合成係数を算出する非線形変換処理部を有する請求項1に記載の画像処理装置。
【請求項3】
前記エラー判定処理部は、
前記距離画像を、横(水平)方向に任意の幅に不均等または均等に分割した分割領域である短冊領域間の類似度を判別する短冊間類似度計算部と、
前記短冊間類似度計算部の算出した短冊間類似度の非線形変換処理によって前記合成係数を算出する非線形変換処理部を有する請求項1に記載の画像処理装置。
【請求項4】
前記短冊領域は、3次元画像表示に適用する左眼用画像と右眼用画像によって構成されるステレオ画像の生成処理に際して利用される短冊の幅と同じ幅を有する請求項3に記載の画像処理装置。
【請求項5】
前記短冊間類似度計算部は、
距離画像における1つおきの短冊領域間の距離信号の差分絶対値和(SAD)を短冊間類似度として算出する請求項3に記載の画像処理装置。
【請求項6】
前記エラー判定処理部は、
前記距離画像を、横(水平)方向に任意の幅に不均等または均等に分割した分割領域である短冊領域間の信号値の凹凸状況を検出してエラー度合いを反映した合成係数を生成して出力する短冊間凹凸判定部を有する請求項1に記載の画像処理装置。
【請求項7】
前記短冊間凹凸判定部は、
距離画像における3つの連続する短冊領域の距離信号の平均値を算出し、算出した3つの信号平均値から隣接する短冊間の信号平均値の差分を2つ算出して、算出した2つの差分に基づいて、短冊間凹凸の有無を判定し、該判定結果に応じた合成係数を生成して出力する請求項6に記載の画像処理装置。
【請求項8】
前記短冊間凹凸判定部は、
3つの連続する短冊領域の距離信号の平均値を平坦にするためのオフセット値を算出して出力する請求項6に記載の画像処理装置。
【請求項9】
前記ローパスフィルタ処理部は、エッジ保存型ノイズ低減処理を実行する請求項1に記載の画像処理装置。
【請求項10】
前記ローパスフィルタ処理部は、
前記オフセット値を適用して、3つの連続する短冊領域の距離信号の平均値を平坦にする補正処理を行った距離画像に対してローパスフィルタを適用してノイズ低減距離画像を生成する請求項8に記載の画像処理装置。
【請求項11】
画像処理装置において実行する画像処理方法であり、
被写体までの距離情報または視差情報を有する距離画像を入力し、距離画像に含まれるエラー信号を検出し、画像領域単位のエラー度合いに応じた合成係数を出力するエラー判定処理ステップと、
前記距離画像に対するローパスフィルタを適用してノイズ低減距離画像を生成するローパスフィルタ処理ステップと、
前記距離画像と、前記ノイズ低減距離画像の合成処理により補正距離画像を生成する距離画像合成ステップを実行し、
前記距離画像合成ステップにおいては、
前記エラー判定処理ステップにおいて出力する画像領域単位の合成係数に従って、画像領域単位で前記距離画像と前記ノイズ低減距離画像の合成比率を設定した合成処理を実行して前記補正距離画像を生成する画像処理方法。
【請求項12】
画像処理装置において画像処理を実行させるプログラムであり、
被写体までの距離情報または視差情報を有する距離画像を入力し、距離画像に含まれるエラー信号を検出し、画像領域単位のエラー度合いに応じた合成係数を出力するエラー判定処理と、
前記距離画像に対するローパスフィルタを適用してノイズ低減距離画像を生成するローパスフィルタ処理と、
前記距離画像と、前記ノイズ低減距離画像の合成処理により補正距離画像を生成する距離画像合成処理を実行させ、
前記距離画像合成処理においては、
前記エラー判定処理ステップにおいて出力する画像領域単位の合成係数に従って、画像領域単位で前記距離画像と前記ノイズ低減距離画像の合成比率を設定した合成処理を実行して前記補正距離画像を生成させるプログラム。
【請求項1】
被写体までの距離情報または視差情報を有する距離画像を入力し、距離画像に含まれるエラー信号を検出し、画像領域単位のエラー度合いに応じた合成係数を出力するエラー判定処理部と、
前記距離画像に対するローパスフィルタを適用してノイズ低減距離画像を生成するローパスフィルタ処理部と、
前記距離画像と、前記ノイズ低減距離画像の合成処理により補正距離画像を生成する距離画像合成部を有し、
前記距離画像合成部は、
前記エラー判定処理部の出力する画像領域単位の合成係数に従って、画像領域単位で前記距離画像と前記ノイズ低減距離画像の合成比率を設定した合成処理を実行して前記補正距離画像を生成する画像処理装置。
【請求項2】
前記エラー判定処理部は、
前記距離画像の区分領域単位の分散値を算出する分散値計算処理部と、
前記分散値計算処理部の算出した区分領域単位の分散値の非線形変換処理によって前記合成係数を算出する非線形変換処理部を有する請求項1に記載の画像処理装置。
【請求項3】
前記エラー判定処理部は、
前記距離画像を、横(水平)方向に任意の幅に不均等または均等に分割した分割領域である短冊領域間の類似度を判別する短冊間類似度計算部と、
前記短冊間類似度計算部の算出した短冊間類似度の非線形変換処理によって前記合成係数を算出する非線形変換処理部を有する請求項1に記載の画像処理装置。
【請求項4】
前記短冊領域は、3次元画像表示に適用する左眼用画像と右眼用画像によって構成されるステレオ画像の生成処理に際して利用される短冊の幅と同じ幅を有する請求項3に記載の画像処理装置。
【請求項5】
前記短冊間類似度計算部は、
距離画像における1つおきの短冊領域間の距離信号の差分絶対値和(SAD)を短冊間類似度として算出する請求項3に記載の画像処理装置。
【請求項6】
前記エラー判定処理部は、
前記距離画像を、横(水平)方向に任意の幅に不均等または均等に分割した分割領域である短冊領域間の信号値の凹凸状況を検出してエラー度合いを反映した合成係数を生成して出力する短冊間凹凸判定部を有する請求項1に記載の画像処理装置。
【請求項7】
前記短冊間凹凸判定部は、
距離画像における3つの連続する短冊領域の距離信号の平均値を算出し、算出した3つの信号平均値から隣接する短冊間の信号平均値の差分を2つ算出して、算出した2つの差分に基づいて、短冊間凹凸の有無を判定し、該判定結果に応じた合成係数を生成して出力する請求項6に記載の画像処理装置。
【請求項8】
前記短冊間凹凸判定部は、
3つの連続する短冊領域の距離信号の平均値を平坦にするためのオフセット値を算出して出力する請求項6に記載の画像処理装置。
【請求項9】
前記ローパスフィルタ処理部は、エッジ保存型ノイズ低減処理を実行する請求項1に記載の画像処理装置。
【請求項10】
前記ローパスフィルタ処理部は、
前記オフセット値を適用して、3つの連続する短冊領域の距離信号の平均値を平坦にする補正処理を行った距離画像に対してローパスフィルタを適用してノイズ低減距離画像を生成する請求項8に記載の画像処理装置。
【請求項11】
画像処理装置において実行する画像処理方法であり、
被写体までの距離情報または視差情報を有する距離画像を入力し、距離画像に含まれるエラー信号を検出し、画像領域単位のエラー度合いに応じた合成係数を出力するエラー判定処理ステップと、
前記距離画像に対するローパスフィルタを適用してノイズ低減距離画像を生成するローパスフィルタ処理ステップと、
前記距離画像と、前記ノイズ低減距離画像の合成処理により補正距離画像を生成する距離画像合成ステップを実行し、
前記距離画像合成ステップにおいては、
前記エラー判定処理ステップにおいて出力する画像領域単位の合成係数に従って、画像領域単位で前記距離画像と前記ノイズ低減距離画像の合成比率を設定した合成処理を実行して前記補正距離画像を生成する画像処理方法。
【請求項12】
画像処理装置において画像処理を実行させるプログラムであり、
被写体までの距離情報または視差情報を有する距離画像を入力し、距離画像に含まれるエラー信号を検出し、画像領域単位のエラー度合いに応じた合成係数を出力するエラー判定処理と、
前記距離画像に対するローパスフィルタを適用してノイズ低減距離画像を生成するローパスフィルタ処理と、
前記距離画像と、前記ノイズ低減距離画像の合成処理により補正距離画像を生成する距離画像合成処理を実行させ、
前記距離画像合成処理においては、
前記エラー判定処理ステップにおいて出力する画像領域単位の合成係数に従って、画像領域単位で前記距離画像と前記ノイズ低減距離画像の合成比率を設定した合成処理を実行して前記補正距離画像を生成させるプログラム。
【図2】

【図3】
【図5】
【図11】
【図13】
【図15】
【図16】
【図17】
【図18】
【図20】
【図21】
【図22】
【図1】
【図4】

【図6】
【図7】
【図8】
【図9】
【図10】
【図12】
【図14】
【図19】
【図3】
【図5】
【図11】
【図13】
【図15】
【図16】
【図17】
【図18】
【図20】
【図21】
【図22】
【図1】
【図4】
【図6】
【図7】
【図8】
【図9】
【図10】
【図12】
【図14】
【図19】
【公開番号】特開2013−114517(P2013−114517A)
【公開日】平成25年6月10日(2013.6.10)
【国際特許分類】
【出願番号】特願2011−261034(P2011−261034)
【出願日】平成23年11月29日(2011.11.29)
【出願人】(000002185)ソニー株式会社 (34,172)
【Fターム(参考)】
【公開日】平成25年6月10日(2013.6.10)
【国際特許分類】
【出願日】平成23年11月29日(2011.11.29)
【出願人】(000002185)ソニー株式会社 (34,172)
【Fターム(参考)】
[ Back to top ]