
画像処理装置、これを搭載したレーダ装置、画像処理方法及び画像処理プログラム
【課題】画像処理装置において、物標の接近を検出する簡素な構成を実現するとともに、接近物標が存在することをオペレータが直感的に把握できるように画像処理を行う構成を実現する。
【解決手段】レーダ装置5に搭載される画像処理装置10は、相対航跡用画像メモリ32と、相対航跡判定処理部33と、を備える。相対航跡用画像メモリ32は、当該レーダ装置5に対する物標の相対的な位置変化を示す相対航跡データ群として記憶可能に構成される。相対航跡判定処理部33は、相対航跡用画像メモリ32に記憶される相対航跡データ群のうち、同じスイープライン上に存在する画素の相対航跡データに基づいて、自船(レーダ装置5)に接近する接近物標を検出する。
【解決手段】レーダ装置5に搭載される画像処理装置10は、相対航跡用画像メモリ32と、相対航跡判定処理部33と、を備える。相対航跡用画像メモリ32は、当該レーダ装置5に対する物標の相対的な位置変化を示す相対航跡データ群として記憶可能に構成される。相対航跡判定処理部33は、相対航跡用画像メモリ32に記憶される相対航跡データ群のうち、同じスイープライン上に存在する画素の相対航跡データに基づいて、自船(レーダ装置5)に接近する接近物標を検出する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、送信した探知信号に対して取得されたエコー信号に基づく情報を画像として表示するための処理を行う画像処理装置に関するものである。
【背景技術】
【0002】
船舶の航行において、エコー信号に基づく情報を処理して画像として表示するための画像処理装置が搭載されたレーダ装置を用いて自船の周囲に存在する物標を検出し、自船と物標との位置関係を把握することは、他船との衝突の回避に有効な方法である。特に、夜間や濃霧発生時等の視界が良好でない状況では、レーダ装置の利用が必要不可欠なものになる。なお、この種のレーダ装置においては、レーダ画面に表示する画像等を生成するために、前記エコー信号に基づく情報に対して適宜の処理を行う画像処理装置を備えることが多い。
【0003】
しかし、オペレータがレーダ映像に不慣れである場合には、画面上のエコー源(物標を示す表示)が航海の障害となるか否かを判断することが難しかった。また、オペレータがレーダ映像に精通している場合であっても、少なくとも数スキャンの間画面を見続けない限り、衝突の危険度を判断することが困難であった。
【0004】
そこで、レーダ装置の利用を補助する自動衝突予防援助装置(Automatic Radar Plotting Aids、ARPA)を備えるレーダ装置が利用されることがある。このARPAは、レーダ装置からリアルタイムに得られる自船と他船の相対位置、相対方位等の情報に基づいて、他船の進路や他船と自船が最も接近する位置までの時間等を計算する機能を有する。そして、その計算結果を画面上に表示することで、オペレータに対して衝突回避に必要な情報を視覚的にわかり易く提供するものである。この種のARPAを備えたレーダ装置を開示するものとして特許文献1がある。
【0005】
特許文献1は、衝突危険度の高い他船は視認性を高く表示し、衝突危険度の低い他船は視認性を低く表示するように構成した他船表示装置を開示する。特許文献1は、これにより、視認性が高く、衝突回避という目的に適った表示を行うことができるとする。
【0006】
また、レーダ装置において、予め画面上に設定された警報範囲内に物標が検出されると、ブザー等の報知手段を作動させて、自船に接近する物標が存在することをオペレータに知らせる警報システムを備えるものが知られている。
【0007】
更に、レーダ装置において、他船(物標)の現在位置と、その航跡(移動軌跡)を画面上に表示するいわゆるトレイル機能を有するものがある。この航跡の表示形式としては、自船に対する相対的な位置変化を航跡として表示する相対トレイルモード(相対航跡表示形式)と、絶対的な位置変化を航跡として表示する真トレイルモード(真航跡表示形式)と、が従来から知られている。相対トレイルモードでは、自船に対する他船の相対的な位置変化が航跡として画面上に表示される。真トレイルモードでは、自船の動きとは無関係に、陸地等の固定物標に対する物標の現実の位置変化が航跡として画面上に表示される。オペレータは、これらのトレイル機能を状況や好みによって使い分け、他船の進行方向の予測や衝突の回避等に役立てていた。
【先行技術文献】
【特許文献】
【0008】
【特許文献1】特開2003−48595号公報
【発明の概要】
【発明が解決しようとする課題】
【0009】
特許文献1に示すようなARPAは、他船との衝突を回避するための情報をわかり易く直感的に画面上に表示できる。しかし、物標の捕捉、追尾動作等の技術的に高度な処理が必要になるため、内部の処理が複雑化し、回路規模の大型化の原因にもなっていた。従って、製造コストの低減という観点から改善の余地があった。
【0010】
この点、レーダ装置に警報範囲を設定する方法は、ARPAのように計算等を行う必要がなく、低コストで物標の接近を検出する構成を実現できるメリットがある。しかし、警報範囲に入った物標を接近物標として単純に判定してしまうため、自船から離れるように移動しているような衝突の危険性がない物標であっても、警報範囲に入ると報知手段が一律に作動してしまっていた。
【0011】
また、トレイル機能を利用して物標の接近を判断する場合においても、表示形式によって以下のような課題があった。即ち、相対トレイルモードでは、物標の自船に対する相対的な位置変化が航跡で表示される構成のため、自船が移動している場合には、現実には移動していない固定物標にも航跡が表示されてしまう。そのため、多数の物標が存在する海域では、表示画面上に多数の航跡が表示され、移動物標であるか固定物標であるかの識別が困難であった。この点、真トレイルモードでは、物標の絶対的な位置変化が航跡で表示される構成のため、自船が移動している場合であっても、陸地等の固定物標には航跡が表示されない。しかしながら、真トレイルモードでは、他船の現実の位置変化が表示されるため、相対トレイルモードのように他船が自船に接近しているか否かを直感的に判断することが困難であった。
【0012】
本発明は以上の事情に鑑みてなされたものであり、その目的は、画像処理装置において、物標の接近を検出する簡素な構成を実現するとともに、接近物標が存在することをオペレータが直感的に把握できるように画像処理を行う構成を提供することにある。
【課題を解決するための手段及び効果】
【0013】
本発明の解決しようとする課題は以上の如くであり、次にこの課題を解決するための手段とその効果を説明する。
【0014】
本発明の第1の観点によれば、以下のように構成される画像処理装置が提供される。即ち、画像処理装置は、相対軌跡用画像メモリと、接近物標判定処理部と、を備える。前記相対軌跡用画像メモリは、方位を異ならせて送信した探知信号に対して取得されたエコー信号により探知された物標の、前記探知信号を送信した送信位置に対する相対的な位置変化を示す相対軌跡データ群を記憶可能に構成される。前記接近物標判定処理部は、前記相対軌跡用画像メモリに記憶される前記相対軌跡データ群のうち、同じスイープライン上に存在する相対軌跡データに基づいて、前記探知信号により探知された物標が前記送信位置に接近する接近物標であるか否かを判定する。
【0015】
これにより、速度や方向等を考慮した複雑な計算を行うことなく、同じスイープライン上の相対軌跡データを調べるという簡単な処理で、探知信号により探知された物標が接近する物標であるか否かの判定を行うことができる。従って、接近物標を検出するための構成をシンプルにすることができ、低コスト化を実現できる。
【0016】
前記の画像処理装置においては、前記接近物標判定処理部によって前記接近物標と判定された物標が他の物標と区別して表示されるように画像処理を行うことが好ましい。
【0017】
これにより、接近物標が他の物標と区別して表示されるので、ユーザは接近物標を直感的かつ即座に把握することができる。
【0018】
前記の画像処理装置においては、前記相対軌跡データ群に基づいて、物標とともにその物標の相対軌跡が表示されるように画像処理を行うことが好ましい。
【0019】
これにより、他の物標と区別して表示される接近物標とともに、物標が相対的に接近しているか否かを認識することが容易な相対軌跡が表示されるので、接近物標との衝突の可能性の有無を迅速に判断することができる。また、接近物標と相対的に位置が変化しない物標とが区別して表示されるので、相対軌跡が物標とともに表示されることによって、両者が紛らわしくなって判別できなくなる事態も防止できる。
【0020】
前記の画像処理装置においては、以下のように構成されることが好ましい。即ち、画像処理装置は、エコー信号により探知された物標の絶対的な位置変化を示す真軌跡データ群を記憶可能な真軌跡用画像メモリを備える。前記真軌跡データ群に基づいて、物標とともにその物標の真軌跡が表示されるように画像処理を行う。
【0021】
これにより、絶対的な位置変化を示すため、探知信号の送信位置(自移動体)に対して相対的に接近しつつあるか否かを即座に判断できないような真軌跡データ群に基づいて真軌跡を表示する場合であっても、接近物標が他の物標と区別して表示されるので、衝突の危険性を即座かつ直感的に判断できる。
【0022】
前記の画像処理装置においては、前記接近物標判定処理部によって前記接近物標と判定された物標の相対軌跡又は真軌跡が、他の物標の相対軌跡又は真軌跡と区別して表示されるように画像処理を行うことが好ましい。
【0023】
これにより、接近物標だけではなく相対軌跡又は真軌跡が区別して表示されるので、衝突の危険性をより直感的に判断できる。
【0024】
前記の画像処理装置においては、以下のように構成されることが好ましい。即ち、前記相対軌跡データは、前記相対軌跡用画像メモリを構成する画素単位で生成される情報であって、前記物標が直近に検出されてからの経過時間に応じて段階的に変化する情報である。そして、前記接近物標判定部は、前記スイープライン上で物標が検出された場合に、その検出位置を起点として前記送信位置から離れる方向で、前記相対軌跡データの値が当該スイープライン上で画素的な連続性を保ちつつ所定の条件を満たしながら変化する場合に、その画素が、前記接近物標に係る相対軌跡に含まれていると判定する。
【0025】
これにより、接近物標として検出する必要のない物標の小さな動きを検出しないように所定の条件を設定することで、実際に衝突のおそれのある物標の検出精度を向上させることができる。
【0026】
前記の画像処理装置においては、前記所定の条件は変更可能であることが好ましい。
【0027】
これにより、使用する状況に応じた接近物標の検出精度を設定することができ、画像処理装置の柔軟な運用が可能になる。
【0028】
前記の画像処理装置においては、前記接近物標に係る相対軌跡に含まれていると前記接近物標判定処理部によって判定された画素から、当該相対軌跡の前記接近物標が現在存在する画素を前記相対軌跡データ群に基づいて求める接近物標位置取得部を備えることが好ましい。
【0029】
これにより、衝突するおそれがある接近物標の現在の位置を、簡素な構成で確実に検出することができる。
【0030】
前記の画像処理装置においては、以下のように構成されることが好ましい。即ち、画像処理装置は、予め設定される警報範囲の内部に前記接近物標が存在することを検出する警報範囲判定部と、前記警報範囲判定部によって前記接近物標が検出されると作動する報知部と、を備える。
【0031】
これにより、現実に衝突の危険がある物標の存在だけを正確にユーザに知らせることができる警報システムを簡素な構成で提供することができる。
【0032】
本発明の第2の観点によれば、前記の画像処理装置を搭載したレーダ装置が提供される。
【0033】
本発明の第3の観点によれば、以下のステップを含む画像処理方法が提供される。即ち、画像処理方法は、方位を異ならせて送信した探知信号に対して得られるエコー信号を取得するエコー信号取得ステップと、前記エコー信号により探知された物標の、前記探知信号を送信した送信位置に対する相対的な位置変化を示す相対軌跡データ群を記憶させるステップと、前記相対軌跡データ群のうち、同じスイープライン上に存在する相対軌跡データに基づいて、前記探知信号により探知された物標が前記送信位置に接近する接近物標であるか否かを判定するステップと、を含む。
【0034】
これにより、速度や方向等を考慮した複雑な計算を行うことなく、同じスイープライン上の相対軌跡データを調べるという簡単な方法で、探知信号により探知された物標が接近する物標であるか否かの判定を行うことができる。
【0035】
本発明の第4の観点によれば、以下のような画像処理プログラムが提供される。即ち、この画像処理プログラムによってコンピュータが実行する処理は、方位を異ならせて送信した探知信号に対して得られるエコー信号を取得するエコー信号取得ステップと、前記エコー信号により探知された物標の、前記探知信号を送信した送信位置に対する相対的な位置変化を相対軌跡データ群として記憶させるステップと、前記相対軌跡データ群のうち、同じスイープライン上に存在する相対軌跡データに基づいて、前記探知信号により探知された物標が前記送信位置に接近する接近物標であるか否かを判定するステップと、を含む。
【0036】
これにより、速度や方向等を考慮した複雑な計算を行うことなく、スイープライン方向の相対軌跡データを調べるという簡単な処理で、探知信号により探知された物標が接近する物標であるか否かの判定をコンピュータに実行させることができる。このように、接近物標を判定するための処理をシンプルにすることができるので、コンピュータの演算コストを効果的に低減できる。
【図面の簡単な説明】
【0037】
【図1】本発明の第1実施形態に係る画像処理装置が搭載されたレーダ装置の構成を概略的に示したブロック図。
【図2】基準方位とスイープ角度の関係を示した模式図。
【図3】航跡データ発生部の構成を示したブロック図。
【図4】エコーデータから航跡データを生成する処理を示したフローチャート。
【図5】航跡データの分布例を示した模式図。
【図6】相対航跡判定処理部の構成を示したブロック図。
【図7】相対航跡判定処理部による接近物標の判定処理の前半を示したフローチャート。
【図8】相対航跡判定処理部による接近物標の判定処理の後半を示したフローチャート。
【図9】相対航跡データの分布例及び中間データの値の推移を示した模式図。
【図10】スキャン用アドレス発生部によって決定されたアドレスに従って、検出処理を行う様子を示した模式図。
【図11】スキャン用アドレス発生部によるアドレスを生成する処理を示したフローチャート。
【図12】接近物標探知処理部の構成を示したブロック図。
【図13】相対航跡の探知処理において、比較に用いられる画素と検出処理中の画素との位置関係を示した模式図。
【図14】接近物標探知処理部による物標の位置を検出する処理の前半を示したフローチャート。
【図15】接近物標探知処理部による物標の位置を検出する処理の後半を示したフローチャート。
【図16】第1マークGに基づいて第2マークJを書き込む様子を示した模式図。
【図17】第1マークGに基づいて第2マークJを書き込む処理をスキャン方向ごとに示した模式図。
【図18】第1マークGに基づいて第2マークJを書き込む処理をスキャン方向ごとに示した模式図。
【図19】自船と警報範囲の位置関係を示した模式図。
【図20】警報範囲に接近物標が存在するか否を検出する処理を示したフローチャート。
【図21】第2実施形態の画像処理装置が搭載されたレーダ装置の構成を概略的に示したブロック図。
【図22】真航跡探知処理部の構成を示したブロック図。
【図23】真航跡の探知処理において、比較に用いられる画素と検出処理中の画素との位置関係を示した模式図。
【図24】第3マークMを書き込む処理の前半を示したフローチャート。
【図25】第3マークMを書き込む処理の後半を示したフローチャート。
【図26】第2マークJに基づいて第3マークMを書き込む様子を示した模式図。
【図27】第2マークJに基づいて第3マークMを書き込む処理をスキャン方向ごとに示した模式図。
【図28】第2マークJに基づいて第3マークMを書き込む処理をスキャン方向ごとに示した模式図。
【発明を実施するための形態】
【0038】
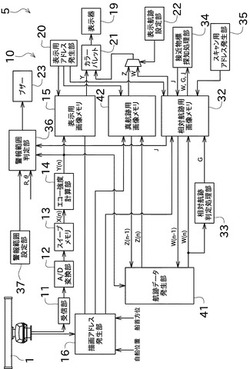
次に発明の実施の形態について説明する。図1は、本発明の第1実施形態に係る画像処理装置10が搭載されたレーダ装置5の構成を概略的に示したブロック図である。図2は、基準方位とスイープ角度の関係を示した模式図である。
【0039】
本実施形態のレーダ装置5は、舶用機器として船舶に用いられるものである。図1に示すように、レーダ装置5は、レーダアンテナ1と、表示器19と、を備える。また、このレーダ装置5には、画像処理を行うための画像処理装置10が備えられており、この画像処理装置10は、受信部11と、A/D変換部12と、スイープメモリ13と、エコー強度計算部14と、表示用画像メモリ15と、描画アドレス発生部16と、表示用アドレス発生部20と、カラーパレット21と、を備えている。
【0040】
また、レーダ装置5は、他船の航跡(物標の移動軌跡)を表示する機能を有している。この機能を実現するために、前記画像処理装置10には、航跡データ発生部(軌跡データ発生部)41と、相対航跡用画像メモリ(相対軌跡用画像メモリ)32と、真航跡用画像メモリ(真軌跡用画像メモリ)42と、相対航跡判定処理部(接近物標判定処理部)33と、接近物標探知処理部(接近物標位置取得部)34と、スキャン用アドレス発生部35と、が備えられている。
【0041】
画像処理装置10は、前記航跡の表示形式として、相対トレイルモード(相対軌跡表示形式)と、真トレイルモード(真軌跡表示形式)と、の何れかを選択可能に構成されており、この表示形式を選択するための表示航跡設定部22を備えている。相対トレイルモードは、自船に対する他船の相対的な位置変化を示す相対航跡を表示器19に表示するモードである。また、真トレイルモードは、他船の絶対的な位置変化を示す真航跡を表示器19に表示するモードである。
【0042】
また、レーダ装置5は、自船に接近する物標を検出した場合に、警報を作動させてオペレータに危険を知らせる警報機能を有している。この機能を実現する構成の一部として、画像処理装置10は、警報範囲判定部36と、警報範囲設定部37と、ブザー(報知部)23と、を備えている。
【0043】
なお、以下の説明において、相対的に見たときにほぼ自船に真っ直ぐ向かって移動している物標を「接近物標」と呼ぶことがある。接近物標が存在する場合、当該接近物標及び自船のうち少なくとも何れかが移動の向き又は速度を変えないと、当該物標は将来的に自船と衝突する可能性が高いということができる。
【0044】
レーダアンテナ1は、パルス状の電波である探知信号を送信(放射)できるとともに、この送信した電波の反射波であるエコー信号を受信可能に構成されている。このレーダアンテナ1は、所定の周期で水平面内を回転しており、この回転周期より小さい周期で前記探知信号が方位を異ならせながら繰り返し送信されている。
【0045】
受信部11は、レーダアンテナ1が受信した反射波を検波し、増幅してA/D変換部12に出力する。A/D変換部12は、受信部11から送られてきたアナログ信号を適宜のデジタル信号に変換する。
【0046】
スイープメモリ13は、A/D変換部12によってデジタル信号に変換された1スイープ分の受信データを記憶可能に構成されている。なお、ここでいう「スイープ」とは、探知信号を送信してから次の探知信号を送信するまでの一連の動作をいい、「1スイープ分の受信データ」とは、探知信号を送信した後、次の探知信号を送信するまでの期間に受信したデータをいう。
【0047】
電波は直進する性質を持っているので、1スイープ分の受信データは、自船を起点にしてレーダアンテナ1の向きに引いた1本の直線上における状況を表す。また、レーダアンテナ1が当該直線の向きに探知信号を送信したときに、自船に近い物標によるエコー信号は早いタイミングで受信され、遠い物標によるエコー信号は遅いタイミングで受信される。従って、1スイープ分の受信データには、前記直線上に物標があるか否かの情報、及び、物標があった場合は当該物標が自船からどれだけ離れているかを表す情報が含まれている。前記スイープメモリ13には、1スイープ分の受信データを時系列順で記憶することができる。
【0048】
エコー強度計算部14は、スイープメモリ13から1スイープ分の受信データを時系列順に読み出して振幅を順次計算することで、当該受信データ中に等間隔で設定された複数のポイントでのエコー強度をそれぞれ算出する。これは、実質的には、レーダアンテナ1から探知信号を送信した時点から一定の時間間隔をあけて複数設定された時刻のそれぞれにおいて、反射波のエコー強度を検出することに相当する。
【0049】
エコー強度計算部14で取得されたエコー強度のデータ群(以下、このデータ群を「1スイープ分のエコー強度データ群」と呼ぶことがある。)は、表示用画像メモリ15へ時系列順に出力され、順次記憶される。なお、1スイープ分のエコー強度データ群を表示用画像メモリ15の画像データのうち何れの画素に記憶させるかは、描画アドレス発生部16によって決定される。また、本実施形態では、1スイープ分のエコー強度データ群は、航跡データ発生部41及び警報範囲判定部36のそれぞれに送信されており、後述する航跡データの生成及び接近物標の検出に用いられる。
【0050】
表示用画像メモリ15は、表示器19に画像を表示するための複数の画素データからなる画像データ(ラスタデータ)を記憶可能に構成されている。表示用画像メモリ15が保持する画像(以下、表示用画像と称する。)は、多数の画素が縦横に格子状(M画素×N画素のマトリクス状)に並べられることで表現されている。
【0051】
この表示用画像メモリ15に格納された表示用画像のデータは、適宜のタイミングで読み出されて表示器19に表示される。表示用画像メモリ15には、エコー強度の情報等を前記画素データとして画素ごとに記憶することができる。
【0052】
描画アドレス発生部(画素位置計算部)16は、エコー強度計算部14で得られた1スイープ分のエコー強度データ群を構成するエコー強度データのそれぞれについて、対応する表示用画像上の画素の位置(アドレス)を求めることができる。この描画アドレス発生部16には、探知信号を送信したときのレーダアンテナ1の角度θを表す信号が入力される。描画アドレス発生部16は、レーダアンテナ1の角度θ及びレーダレンジ等に基づき、エコー強度の各データに対応する画素の位置を以下の方法で計算する。
【0053】
即ち、レーダアンテナ1から探知信号を送信してから時間tが経過した時点でエコー信号が返ってきた場合、その時間tの間に、レーダアンテナ1と物標との間の距離rを電波が往復したことになる。従って、水平な平面内でレーダアンテナ1を原点とする極座標系を定義すると、レーダアンテナ1が探知信号を送信してから時間tが経過したときのエコー強度に対応する物標の位置は、当該探知信号の送信時の所定の方位基準(例えば北)からのアンテナ角度をθとして、上記の極座標系で(r,θ)=(c×t/2,θ)と表すことができる。ただし、cは光速である。また、図2に示すように、上記極座標系においてアンテナ角度θは、レーダアンテナ1が所定の方位(北方向)を向いているときに0°となり、レーダアンテナ1が通常回転する方向が正となるように定められる。なお、描画アドレス発生部16には、GPSセンサ及びジャイロコンパス(何れも図面において省略)から船首方位及び自船位置を示す情報が入力されている。また、所定の方位を船首方位とすることもできる。
【0054】
一方、表示用画像メモリ15で保持される表示用画像は、上記のとおり、格子状(マトリクス状)に配列された画素によって表現される。本実施形態では、表示用画像における各画素の位置を、画像の左上隅を原点とし、右方向にX軸をとり、下方向にY軸をとるXY直交座標系で取り扱うこととしている。
【0055】
そして、描画アドレス発生部16は、表示用画像メモリ15においてエコー強度の情報を記憶させるべき画素の位置を算出する。具体的には、この画素の位置(X,Y)は、上記XY直交座標系における自船(レーダアンテナ1)の位置を(Xs,Ys)とした場合、以下の式(1)に従って計算される。
【数1】

ただし、tは、レーダアンテナ1が探知信号を送信した時点からの経過時間である。kは、表示器19の表示領域のサイズ及びレーダレンジ等を考慮して定められる定数であり、θはアンテナ角度である。なお、(X,Y)は、前記表示用画像を構成する画素の位置(アドレス)を特定するものであるため、X及びYの計算結果において、小数点以下の端数は適宜丸められる。
【0056】
本実施形態では、1スイープ分のエコー強度データ群を構成する各データが、エコー強度計算部14から表示用画像メモリ15へ時系列順に出力される。そして、描画アドレス発生部16は、それぞれのエコー強度データに対応する画素の位置(X,Y)を式(1)に従って順次求めて表示用画像メモリ15へ出力する。従って、1スイープ分のエコー強度データ群を処理する場合、描画アドレス発生部16としては、上記の式においてθを一定とし、tをゼロから増大させながら(X,Y)を繰り返し計算していくことになる。
【0057】
上記の計算により、1スイープ分のエコー強度データ群に対応する表示用画像上の画素をXY直交座標系で表した位置(X,Y)は、自船の位置(Xs,Ys)を基準とした角度θの直線上となる。なお、以下の説明では、この直線のことを、探知信号の1回の送受信で得られる距離方向に連続する受信データにより形成される直線を示すものとして「スイープライン」と称することがある。
【0058】
従って、前記描画アドレス発生部16は、前記直線上の点(スイープライン上の点)に対応する、表示用画像における画素の位置(X,Y)を求める機能を有しているということができる。また、描画アドレス発生部16は、極座標で表現されるスイープライン上の点(r,θ)を、XY直交座標系での画素の位置(X,Y)に変換する、座標変換部としての機能を有しているということができる。
【0059】
描画アドレス発生部16による計算結果として得られる画素の位置(X,Y)は、tがゼロから増大するに伴って自船の位置(Xs,Ys)から離れていくように順次移動し、その移動軌跡が1本の直線(前記スイープライン)を描くことになる。1スイープ分のエコー強度データ群は、前記表示用画像において1本の前記スイープラインを描くように、計算された位置の画素に画素データとして記憶される。また、探知信号を1回送信する毎にレーダアンテナ1の角度θが変更されるため、これに伴ってスイープラインの角度は変化する。
【0060】
また、本実施形態の描画アドレス発生部16は、相対航跡用画像メモリ32及び真航跡用画像メモリ42に航跡データを書き込むための相対航跡用アドレス及び真航跡用アドレスを生成する。この相対航跡用アドレス及び真航跡用アドレスの詳細については後述する。
【0061】
なお、以後の説明では、表示用画像メモリ15、相対航跡用画像メモリ32及び真航跡用画像メモリ42にエコー強度に基づく画素情報を記憶させることを、当該画素に「描画する」と表現する場合がある。
【0062】
表示用アドレス発生部20は、表示用画像メモリ15から画像データを読み出して表示器19に表示させる際に参照される表示用アドレスを生成する。画像データの読出しは、表示器19が要求するタイミングで行う。また、表示用アドレス発生部20は、相対航跡用画像メモリ32及び真航跡用画像メモリ42に記憶される航跡データを読み出して表示器19に表示させる際に参照される表示用アドレスを生成することもできる。これにより、前記表示航跡設定部22の設定に応じ、真航跡又は相対航跡を表示器19に適切に表示することができる。
【0063】
カラーパレット21は、表示用画像メモリ15から入力される表示用画像の画素データを色情報又は輝度情報に変換するための情報を記憶する。また、このカラーパレット21には、相対航跡用画像メモリ32及び真航跡用画像メモリ42に記憶される航跡データを色情報又は輝度情報に変換するための情報が記憶されている。
【0064】
表示器19は、CRT又はLCD等によって構成されるラスタスキャン式の表示装置である。表示用画像メモリ15から読み出された表示用画像の画像データが、この表示器19によって表示される。
【0065】
以上の構成のレーダ装置5において、エコー強度計算部14は、レーダアンテナ1から探知信号を送信したときのエコー信号に基づいて、1スイープ分のエコー強度データ群を得る。また、描画アドレス発生部16は、探知信号送信時のレーダアンテナ1の角度θに基づいて、1スイープ分のエコー強度データ群を表示用画像メモリ15に記憶させる複数の画素の位置を(XY直交座標系で)順次求める。
【0066】
そして、以上の結果に基づき、表示用画像メモリ15が保持する表示用画像において角度θのスイープラインがあたかも描画されるかのように、前記エコー強度データ群を構成する各データが、表示用画像メモリ15に画素データとして記憶される。以上の処理をレーダアンテナ1の角度θを少しずつ変更しながら繰り返すことで、表示用画像メモリ15の画像データに、自船の位置を基準とするスイープラインを1本ずつ描くことができる。
【0067】
こうして得られた画像データは、表示用画像メモリ15から適宜のタイミングで読み出され、他の画像との合成処理等が適宜行われた上で表示器19に表示される。この結果、多数のスイープラインが放射状に描かれた画像が表示器19に表示され、ユーザは当該画像を見ることで、自船とその周囲の物標との位置関係を知ることができる。レーダアンテナ1の回転に伴って表示用画像メモリ15の画像には新しいスイープラインが繰り返し描画され、この結果、表示器19に表示される画像も随時更新されていく。
【0068】
航跡データ発生部41は、エコー強度計算部14から入力される1画素分のエコー強度のデータ(以下、このデータのことを「エコーデータY」と呼ぶことがある。)に基づいて、当該画素に対応する航跡データを生成する。航跡データには、表示器19の画面上に表示される画素の濃淡を決定する情報が設定されている。なお、本実施形態では、画素情報は8ビット(256段階)で表されている。
【0069】
例えば、その画素を物標が通過して間もない場合には、画面上の航跡が濃く表示されるように前記画素情報が設定される。逆に、その画素を物標が通過して長い時間が経過している場合には、画面上の航跡が淡く表示されるように前記画素情報が設定される。このようにして航跡データ発生部41で生成された航跡データは、相対航跡データWとして相対航跡用画像メモリ32に送信されるとともに、真航跡データZとして真航跡用画像メモリ42にも送信されている。
【0070】
相対航跡用画像メモリ32は、レーダアンテナ1が1回転する間に得られる複数の相対航跡データW(相対航跡データ群)を記憶可能なメモリであり、SDRAM等によって構成されている。航跡データ発生部41が生成した航跡データは、描画アドレス発生部16によって生成された相対航跡用アドレスに従って、相対航跡用画像メモリ32に書き込まれる。描画アドレス発生部16は、相対航跡用画像メモリ32上での自船の位置が固定されるように、航跡データのアドレスを決定する。従って、自船が移動しているかどうかに関わらず(自船の移動量を考慮せずに)、自船を基準とした物標の位置に相当するアドレスに航跡データが書き込まれることになる。結果として、前記航跡データは、自船の移動量と他船の移動量とが合成された(自船に対する他船の相対的な位置変化を示した)相対航跡データWとして相対航跡用画像メモリ32に記憶される。この相対航跡用画像メモリ32に記憶された複数の相対航跡データW(相対航跡データ群)に基づいて、相対航跡が画面上に表示される。
【0071】
真航跡用画像メモリ42は、レーダアンテナ1が1回転する間に得られる複数の真航跡データZ(真航跡データ群)を記憶可能なメモリであり、SDRAM等によって構成されている。航跡データ発生部41が生成した航跡データは、描画アドレス発生部16によって生成された真航跡用アドレスに従って、真航跡用画像メモリ42に書き込まれる。描画アドレス発生部16は、自船の移動量を考慮して航跡データの真航跡用アドレスを決定する。より具体的には、真航跡用アドレスは、相対航跡用アドレスに自船の移動量を適宜の方法で加算することによって得られる。この真航跡用アドレスによって、前記航跡データは、他船の絶対的な位置の変化を示す真航跡データZとして真航跡用画像メモリ42に記憶される。この真航跡用画像メモリ42に記憶された複数の真航跡データZ(真航跡データ群)に基づいて、真航跡が画面上に表示される。真トレイルモードでは、自船の移動量が考慮されるので、相対トレイルモードのように陸地等のような固定物標の軌跡が表示されることはない。
【0072】
なお、相対航跡用画像メモリ32には、前述の相対航跡データ群のほか、後述する各種のマーク(第1マークG及び第2マークJ)の有無についても画素ごとに記憶できるように構成されている。
【0073】
次に、図3から図5までを参照して、航跡データを生成する処理について説明する。図3は、航跡データ発生部41の構成を示したブロック図である。図4は、エコーデータYから航跡データを生成する処理を示したフローチャートである。図5は、航跡データの分布例を示した模式図である。
【0074】
図3に示すように、航跡データ発生部41は、航跡データ検出部61と、画素情報設定部62と、減算タイミング発生部63と、を主要な構成として備えている。
【0075】
航跡データ検出部61は、エコー強度計算部14から入力されるエコーデータYに基づいて、処理を行う画素に物標が存在しているか否かを調べるためのものである。航跡データ検出部61には、閾値として設定値Aが設定されており、この設定値AとエコーデータYの値とを比較して物標の有無を判定する。より具体的には、航跡データ検出部61は、エコーデータYが設定値A以上の場合には、その画素に物標が存在することを示す判定信号B(B=1)を画素情報設定部62に送信する。エコーデータYの値が設定値A未満の場合には、航跡データ検出部61は、その画素に物標が存在しないことを示す判定信号B(B=0)を画素情報設定部62に送信する。
【0076】
画素情報設定部62は、真航跡データZ及び相対航跡データWの元になる航跡データを生成するためのものである。この画素情報設定部62によって、経過時間に応じた航跡データの値が設定される。航跡データの値は、一定時間ごとに減算されることで、経過時間に応じた値に設定される。
【0077】
減算タイミング発生部63は、前記航跡データの値を減算するタイミングを決定するためのものであり、タイミング信号Cを画素情報設定部62に送信している。この減算タイミング発生部63は、所定周期ごとにレーダアンテナ1が1周する間だけC=1のタイミング信号を送信し、それ以外の時間はC=0のタイミング信号を送信する。航跡データ発生部41は、タイミング信号の値が1であり、かつ、所定の条件を満たした場合に、航跡データの値を減算する。
【0078】
この構成で、画素ごとの処理により、新しい航跡データが順次生成される。具体的には、画素情報設定部62が航跡データ検出部61からB=1の判定信号を受信した場合には、当該画素には物標が存在することを示す所定値を航跡データとして設定する。ここで、本実施形態では、前記画素情報を8ビットの整数値データ(0〜255の256段階)として記憶させるものとし、物標の存在を示す前記所定値は255とされている。従って、物標が存在すると判定された画素には、航跡データとして255が書き込まれる。また、B=0の判定信号を受信した場合には、真航跡データZを求める場合、過去の真航跡データZ(n−1)を真航跡用画像メモリ42から参照して、新たな真航跡データZ(n)を真航跡用画像メモリ42に書き込む。相対航跡データWについても同様であり、B=0の判定信号を受信した場合には、相対航跡用画像メモリ32から取得した過去の相対航跡データW(n−1)に基づいて新たな相対航跡データW(n)を求め、当該相対航跡データW(n)を相対航跡用画像メモリ32に書き込む。
【0079】
次に、図4のフローチャートを参照して航跡データの生成について説明する。以下の説明においては、相対航跡データWの生成を例にして説明する。エコー強度計算部14から航跡データ発生部41にエコーデータYが入力されると、図4に示すフローが開始される。まず、航跡データ検出部61は、当該エコーデータYが設定値A以上であるか否かを調べ、その判定結果を画素情報設定部62に送信する(S101)。
【0080】
画素情報設定部62は、エコーデータYが設定値A以上であることを示す判定信号B(B=1)を受信した場合には、相対航跡データW(n)を最大値255に設定する(S102)。また、画素情報設定部62は、エコーデータYが設定値A未満であることを示す判定信号B(B=0)を受信した場合には、相対航跡用画像メモリ32に記憶されている過去の相対航跡データW(n−1)を参照し、その値が0であるか否を調べる(S103)。
【0081】
画素情報設定部62は、S103で参照した過去の相対航跡データW(n−1)が0である場合には、0の値を新たな相対航跡データW(n)として設定する(S104)。画素情報設定部62は、S103の処理で参照した過去の相対航跡データW(n−1)が0でない場合は、タイミング信号Cに基づいて、相対航跡データW(n−1)の値を減算するタイミングであるか否かを調べる(S105)。
【0082】
画素情報設定部62は、相対航跡データW(n−1)の値を減算するタイミングである場合(C=1)には、参照した過去の相対航跡データW(n−1)から1を減算したものを新しい相対航跡データW(n)に設定する(S106)。これにより、画素情報の値は1段階だけ変化する。例えば、参照した過去の相対航跡データW(n−1)の値が255である場合は、新しく設定される相対航跡データW(n)の値は254になる。一方で、減算するタイミングでない場合(C=0)には、画素情報設定部62は、参照した過去の相対航跡データW(n−1)の値を変更せず、そのまま相対航跡データW(n)に設定する(S107)。
【0083】
画素情報設定部62は、S102、S104、S106又はS107の何れかの処理により設定された相対航跡データW(n)を、前記相対航跡用アドレスに従って、相対航跡用画像メモリ32に記憶させる(S108)。航跡データ発生部41は、以上の処理を画素ごとに行って、レーダアンテナ1が1回転する間に得られる1画面分の相対航跡データW(相対航跡データ群)を相対航跡用画像メモリ32に記憶させる。
【0084】
なお、真航跡データZについても、図4のフローと同様の処理で得ることができる。真航跡データZを処理する場合、描画アドレス発生部16によって生成されるアドレスが真航跡用アドレスである点と、新たな真航跡データZ(n)を生成する際に参照する過去の真航跡データZ(n−1)が真航跡用画像メモリ42から読み出される点と、が異なり、それ以外の処理については同様である。この処理を画素ごとに繰り返すことで、レーダアンテナ1が1回転する間に得られる1画面分の真航跡データZ(真航跡データ群)を真航跡用画像メモリ42に記憶させることができる。
【0085】
図5は、真航跡用画像メモリ42に記憶される真航跡データZの分布例を示した模式図である。前述したように、現在物標が存在している画素には、画素情報の値が255に設定される。図5に示される254から251までの値は航跡を示すデータである。また、真航跡データZが0に設定されている画素は、所定時間内に物標が存在しなかったことを示している。図5では、現在物標を示す画素から右側の画素に進むに従って真航跡データZの画素情報の値が1ずつ減少している。このことから、減算タイミングの1周期ごとに、物標が1画素ずつ画面上を左側に進行していることがわかる。
【0086】
次に、図6から図8までを参照して、相対航跡判定処理部33による接近物標の検出処理について説明する。図6は、相対航跡判定処理部33の構成を示したブロック図である。図7及び図8は、相対航跡判定処理部33による接近物標の判定処理を示したフローチャートである。
【0087】
相対航跡判定処理部33は、航跡データ発生部41から入力される相対航跡データWに基づいて、自船に接近しつつある物標を検出するためのものである。図6に示すように、相対航跡判定処理部33は、第1中間データ発生部51と、第1マーク判定部(中間データ判定部)52と、シフト部53と、を主要な構成として備えている。
【0088】
ところで、スイープライン上の画素は、スイープ始点側(中心)から外側に向かって順次描画される。スイープライン上の画素が新しく描画されるごとに、当該画素に対応する相対航跡データW(n)が、航跡データ発生部41から第1中間データ発生部51に入力される。第1中間データ発生部51は、スイープライン上に存在する画素の相対航跡データW(n)に基づいて、物標の接近を判定するための中間データFを生成する。この第1中間データ発生部51によって生成された中間データFは、第1マーク判定部52とシフト部53に出力される。なお、中間データFの生成方法の詳細については後述する。
【0089】
第1マーク判定部52は、中間データFに基づいて、相対航跡データWに記憶されている航跡に係る物標が前述の接近物標(即ち、相対的に見たときにほぼ自船に真っ直ぐ向かって移動している物標)であるか否かを判定する。言い換えれば、第1マーク判定部52は、入力された相対航跡データWに係る画素が、前記接近物標に係る相対航跡に含まれているかどうかを判定する。そして、第1マーク判定部52は、第1マークGを付けるか否かを上記の判定結果に応じて決定し、相対航跡用画像メモリ32に書き込む。
【0090】
この第1マーク判定部52には所定の設定値Tが設定されており、この設定値Tと中間データFの値とを比較することで上記の判定を行う。より具体的には、第1マーク判定部52は、中間データFの値が設定値Tになった場合には、第1マークGが付けられた旨を示すフラグ値(G=1)を、相対航跡用画像メモリ32の対応するアドレスに書き込む。一方、設定値T以外である場合は、第1マークGが付けられなかった旨を示すフラグ値(G=0)を、相対航跡用画像メモリ32の対応するアドレスに書き込む。この設定値Tは、レーダ装置5(画像処理装置10)が有する図略の操作手段を介して、オペレータが変更できるように構成されている。
【0091】
シフト部53は、シフトレジスタ等の遅延回路によって構成されるものであり、第1中間データ発生部51より入力された中間データFを遅延させて、参照データF’として第1中間データ発生部51に出力する。
【0092】
以上の構成で、第1中間データ発生部51は、随時入力されてくる相対航跡データW(n)と、過去の中間データFである参照データF’と、に基づいて新しい中間データFを生成する。
【0093】
次に、図7及び図8のフローチャートを参照しながら接近物標の検出処理について説明する。新しいスイープラインの描画が開始されたことを第1中間データ発生部51が検出すると、図7のフローが開始される。まず、第1中間データ発生部51は、参照データF’の値を0に設定する初期化処理を行う(図7のS201)。次に、描画される画素に対応する相対航跡データWを航跡データ発生部41から取得する(S202)。第1中間データ発生部51は、取得した画素の相対航跡データWの値が、255(物標の存在を示す値)であるか否かを調べる(S203)。相対航跡データWの値が255である場合は、中間データFの値を1に設定する(S204)。
【0094】
また、S203の判断で相対航跡データWの値が255でない場合は、第1中間データ発生部51は、相対航跡データWの値が、255からF’の値を減算した値と等しいか否かを調べる(S205)。そして、相対航跡データWの値が255からF’の値を減算したものと等しい場合は、参照データF’に1を加算したものを中間データFの値に設定する(S206)。例えば、取得した相対航跡データWが254であり、参照データF’が1の場合は、255から参照データF’の値を減算すると255−1=254となり、これは相対航跡データWの値に一致する。この場合、中間データFの値は、参照データF’の値に1を加算した値(1+1=2)に設定される。
【0095】
S203の判断で相対航跡データWの値が255でないと判定された場合であって、かつS205の条件を満たさない場合(W≠255−F’)は、S207の処理が行われる。S207では、第1中間データ発生部51は、相対航跡データWの値が、256からF’の値を減算したものと等しいか否かを調べる。相対航跡データWの値が256からF’の値を減算したものと等しい場合は、中間データFの値として参照データF’の値をそのまま設定する(S208)。また、S207の判断で、相対航跡データWの値が256からF’の値を減算したものと等しくなかった場合(W≠256−F’)には、中間データFの値を0に設定する(S209)。
【0096】
相対航跡判定処理部33は、S204、S206、S208又はS209の処理によって設定された中間データFの値を、スイープライン上の次の画素について中間データFを生成する際に用いる参照データF’の値として設定する(S210)。次に、第1マーク判定部52は、中間データFの値と設定値Tとが等しいか否かを調べる(図8のS211)。中間データFの値が設定値Tと等しい場合には、第1マーク判定部52は、第1マークGを当該画素に付けるべきと判断し、Gの値を1に設定する(S212)。中間データFの値が設定値Tと異なる場合は、Gの値を0に設定する(S213)。
【0097】
第1マーク判定部52は、S212又はS213の処理によって設定されたGの値を、相対航跡用画像メモリの対応するアドレスに書き込む(S214)。そして、S202からS214までの処理をスイープラインの描画が終了するまで繰り返す(S215)。原点から最も遠い位置にある終点の画素の描画が終了したところで、図7及び図8に示したフローをいったん終了する。新しいスイープラインが描画されると、上記フローが再び開始される。そして、スイープラインが描画される度にこの処理を繰り返す。
【0098】
次に、図9を参照して、設定値Tと接近物標との関係について説明する。図9は、スイープ角度θが90度の場合における相対航跡データWの分布例と中間データFの値の推移を示した模式図である。図9では、相対航跡データWの値が画素ごとに示されており、そのときの中間データFの値についても括弧付き数字で示している。また、この例では、第1マーク判定部52に設定されるTの値は6とされている。
【0099】
図9(a)では、1画素分の大きさの物標が自船に向かってきている場合の相対航跡データWの分布と中間データFの推移が示されている。なお、図9(a)では、スイープライン上の画素の一部を取り出して示している。図9(a)に示すように、相対航跡データWの値は、左から右に向かって、0、255、254、253、252、251、250、249の順で並んでいる。
【0100】
相対航跡データWの値は、相対航跡判定処理部33に対し、スイープラインの描画方向に従った順番で入力される。相対航跡データWの値として255が入力された時点で中間データFの値は1となり(図7のS204の処理)、次に254が入力された時点で中間データFの値は2となり(図7のS206の処理)、・・・というように、中間データFは、入力される相対航跡データWの値が255から1ずつ減少するごとに、1ずつ増加する。図9(a)には、中間データFの値の推移を相対航跡データWに対応させて示している。中間データFは、相対航跡データWの値が1つ入力されるごとに、0、1、2、3、4、5、6、7のように変化する。そして、中間データFの値が6になったときの画素に第1マークG(G=1)が設定される。この第1マークGは、その画素が、接近物標の相対航跡の中途部に位置している(言い換えれば、当該画素が、接近物標の相対航跡に含まれている)ことを意味する。
【0101】
図9(b)では、2画素分の大きさの物標が自船に向かってきている場合の相対航跡データWの分布と中間データFの推移が示されている。相対航跡データWの値は、左から右に向かって、255、255、254、253、253、252、251、250の順で並んでいる。
【0102】
この例では、相対航跡データWの値として255が入力された時点で中間データFの値は1となり(図7のS204の処理)、次に255が入力された時点で中間データFの値は1となり(図7のS204の処理)、次に254が入力された時点で中間データFの値は2となり(図7のS206の処理)、次に、253が入力された時点では、中間データFの値は3となる(図7のS206の処理)。図9(b)においては、1つ前の相対航跡データWの値と同じ253が、その次の相対航跡データWの値として入力されており、この場合、中間データFの値は1つ前に設定された値と同じ値である3になる(図7のS208の処理)。次に252が入力された時点で中間データFの値は4になり(図7のS206の処理)、・・・というように、中間データFの値は変化する。従って、図9(b)に示すように、中間データFは、相対航跡データWの値が1つ入力されるごとに、1、1、2、3、3、4、5、6のように変化する。そして、中間データFの値が6になったときの画素に第1マークG(G=1)が設定される。
【0103】
図9(c)では、1画素分の大きさの物標が自船に向かってきている場合の相対航跡データWの分布と中間データFの推移が示されている。相対航跡データWの値は、左から右に向かって、0、255、254、253、252、0、0の順で並んでいる。
【0104】
この相対航跡データWの例では、中間データFは、0、1、2、3、4、0、0、0の順に変化する。このように、自船に他船が向かっているような場合であっても、相対航跡データWの値が一定以上連続しないような場合は、中間データFの値が6に到達しないので、G=1が設定される画素がない。従って、図9(c)の状態では、接近物標が検出されないことになる。
【0105】
図9(d)では、1画素分の大きさの物標が自船から離れていく場合の相対航跡データW及び中間データFの分布例が示されている。相対航跡データWの値は、左側から右側に、249、250、250、251、252、253、254、255の順で並んでいる。
【0106】
この相対航跡データWの例では、中間データFは、0、0、0、0、0、0、0、1の順に変化する。このように、自船から離れる向きに移動する物標の航跡に対しては、中間データFの値が0に設定される。従って、何れの画素にも、接近物標であることを示すG=1が設定されない。このように、スイープライン上で相対航跡データWの値が連続する場合であっても、物標が自船から離れる方向に移動している場合では、接近物標が検出されることはない。
【0107】
以上のように、本実施形態の相対航跡判定処理部33では、物標が現在存在していることを示す画素(255)を検出した位置から、スイープライン上を自船から離れる方向で、相対航跡データWの値が連続性を保ちながら所定値まで減少しているか否かを調べる。そして、そのような関係が検出された場合に、相対航跡データWの値が当該所定値に達した画素に、当該画素が接近物標の相対航跡に含まれていることを示すG=1が設定される。
【0108】
なお、前記設定値Tを小さく設定する(T≦4)ことで、図9(c)に示される物標を接近物標として検出することも可能である。このように、設定値Tは接近物標を検出する基準を意味しており、この設定値Tを変更することで、接近物標を検出する感度を調整することができる。例えば、図9(a)及び図9(b)の場合では、設定値TをT≧8の範囲で設定した場合、中間データFの値が8に到達する前に相対航跡データWの値が0になるので、接近物標の相対航跡が検出されないことになる。
【0109】
次に、接近物標探知処理部34による接近物標の現在位置の検出について説明する。即ち、ある画素に前記第1マークGが付けられたといっても、それは接近物標が過去の時点で当該画素に存在したことを意味するにとどまり、その接近物標が現在どこにあるかは不明である。そこで、当該接近物標の現在位置を接近物標探知処理部34により求めるのである。なお、以下に説明する処理は、スイープラインを描画する処理とは独立した処理として行う。
【0110】
接近物標探知処理部34は、相対航跡用画像メモリ32に記憶される相対航跡データW群から第1マークG(G=1)が設定されている画素を探索し、当該画素をトリガ画素として相対航跡データWを所定方向に辿っていくことで、接近物標の現在の位置を検出するものである。相対航跡用画像メモリ32に記憶される相対航跡データW群及び第1マークGの値は、スキャン用アドレス発生部35が生成するアドレス(画素位置)の変化に応じた順番で、それぞれの画素について調べられる。
【0111】
まず、図10及び図11を参照して、検出する画素位置の決定について説明する。図10は、スキャン用アドレス発生部35によって決定されたアドレスに従って、検出処理を行う様子を示した模式図である。図11は、スキャン用アドレス発生部35によるアドレスを生成する処理を示したフローチャートである。
【0112】
スキャン用アドレス発生部35は、相対航跡用画像メモリ32に記憶される全ての画素を指定するように、アドレスを順次決定する。まず、スキャン用アドレス発生部35において、検出処理を開始する開始画素のアドレス(開始アドレス)が設定されるとともに、検出処理を終了する終了画素のアドレス(終了アドレス)が設定される。前記開始画素は、相対航跡用画像メモリ32の相対航跡データ群の4隅に配置される画素のうちの1つに設定される。前記終了画素は、前記4隅に配置される画素のうち、前記開始画素が設定される画素に対してはす向かいの位置にある画素に設定される。なお、本実施形態では図10に示すように開始画素から終了画素に向かって処理が順次行われるので、この処理の流れに着目して、以下の説明においては開始画素側を上流側、終了画素側を下流側とそれぞれ称することがある。
【0113】
図10では、M×N個の画素がXY直交座標系で配列された相対航跡用画像メモリ32において、開始画素を左上隅の画素に設定し、終了画素を右下隅の画素に設定した例が示されている。図10に示す例では、開始画素の開始アドレスは(Xf,Yf)であり、終了画素の終了アドレスは(Xf+M−1,Yf+N−1)である。この構成で、変数m(M>m≧0)及びn(N>n≧0)を用いた場合、検出処理中の画素のアドレスは(Xf+m,Yf+n)と表現することができる。開始画素は1段目のラインに属しており、終了画素はN段目のラインに属している。ここでいうラインとは、横方向(X軸方向に平行な方向)のラインである。
【0114】
図11を参照しながら具体的な検出処理について説明する。処理が開始されると、アドレスを決定する変数m及び変数nに0が設定される(S301)。次に、スキャン用アドレス発生部35は、検出処理を行う画素のアドレス(X,Y)を、X=Xf+m、Y=Yf+nに従って決定する(S302)。例えば、1回目の処理では、m=0、n=0に設定されているので、最初に設定されるアドレスは(Xf,Yf)となり、これは開始画素のアドレスと一致する。次に、S302の処理で設定されたアドレスの画素について検出処理を行う(S303)。
【0115】
次に、m=M−1であるか否かを調べ(S304)、m≠M−1である場合は、mの値に1を加算して(S305)、S302の処理に戻る。m=M−1である場合は、S303で検出処理した画素が右端の画素であった場合なので、mの値に0を設定する(S306)。続いて、検出処理を行った画素が終了アドレスであったか否かを判定するため、n=N−1であるか否かを調べる(S307)。n≠N−1ならば、終了画素ではないので、nの値に1を加算して(S308)、S302の処理に戻る。S307の判断で、終了アドレスに到達したと判定された場合(n=N−1)、この処理を終了する。
【0116】
以上のフローにより、S303の検出処理が、開始画素から終了画素に到達するまで1画素ずつ順次繰り返される。この結果、相対航跡用画像メモリ32に記憶される全ての画素の相対航跡データWが処理されることになる。
【0117】
次に、図12から図15までを参照して、接近物標探知処理部34による検出処理の具体的な内容について説明する。図12は、接近物標探知処理部34の構成を示したブロック図である。図13は、比較画素a,b,cと検出処理中の画素との位置関係を示した模式図である。図14及び図15は、接近物標探知処理部34による物標の位置を検出する処理を示したフローチャートである。
【0118】
図12に示すように、接近物標探知処理部34は、第2中間データ発生部81と、第2マーク判定部82と、ラインメモリ83と、2つのシフト部84,85と、を主要な構成として備えている。
【0119】
第2中間データ発生部81は、第2マーク判定部82が物標の存在を検出する判定を行うための第2中間データHを生成するものである。第2中間データ発生部81には、相対航跡データW、及び第1マークの有無に関するデータGが相対航跡用画像メモリ32から入力されている。また、第2中間データ発生部81には、検出処理を行っている画素のアドレスを特定するための変数m及びn(図10を参照)が入力されている。なお、現在検出処理を行っている画素(m及びnの値により特定される画素)を、以下の説明で検出画素と称することがある。
【0120】
第2中間データ発生部81には、検出画素の近傍に位置する比較画素a,b,cの第2中間データHの値がそれぞれ入力されている。図13を用いて検出画素と比較画素a,b,cとの位置関係について説明する。なお、図13は、開始画素を左上隅の画素に設定し、終了画素を右下隅の画素に設定したときの検出画素と比較画素との位置関係を示すものである。図13に示すように、比較画素cは、検出画素の直前に検出処理が行われた画素であり、検出画素の左側(X軸方向の上流側)に隣接している。比較画素a,bは、検出画素が属するラインの上側(Y軸方向の上流側)に隣接するラインに属する画素である。このうち比較画素bは、検出画素の上側(Y軸方向の上流側)に隣接し、比較画素aは、比較画素bの左側(X軸方向の上流側)に隣接するとともに比較画素cの上側(Y軸方向の上流側)に隣接している。
【0121】
比較画素の位置は、開始画素の位置に応じて、検出画素との関係で相対的に定められる。例えば、開始画素が右下隅の画素に設定される場合は、検出画素の右側に比較画素cが位置し、検出画素の下側に比較画素bが位置する。そして、比較画素aは、比較画素bの右側に位置するとともに比較画素cの下側に位置する。このように、比較画素aは、検出画素及び比較画素a,b,cの中では開始画素に最も近い画素になる。一方、検出画素は、検出画素及び比較画素a,b,cの中では終了画素に最も近い画素になる。
【0122】
第2中間データ発生部81は、これらのデータに基づいて第2中間データHを生成し、この第2中間データHを第2マーク判定部82に送信する。また、生成された第2中間データHは、参照データ(比較画素a,b,cの値)として新たな第2中間データHを生成する際に用いるため、ラインメモリ83及びシフト部84に送信されている。
【0123】
第2中間データ発生部81は、検出画素に第1マークGが付けられていること(G=1)を検出した場合は、検出画素の相対航跡データWを第2中間データHの値として設定する。例えば、相対航跡データWの値が250である画素にG=1が設定されていた場合、第2中間データHの値に250を設定する。
【0124】
また、第2中間データ発生部81は、検出画素の相対航跡データWの値と前記比較画素の値とを比較し、所定の判定条件を満たす場合にも、当該検出画素の相対航跡データWの値を第2中間データHの値として設定する。より具体的には、相対航跡データWの値(以下の説明において、単にWと表現する場合がある。)が、比較画素aの値又は比較画素bの値又は比較画素cの値のうち少なくとも何れか1つと等しい値である又は比較画素の値より1だけ大きい値である場合に、第2中間データ発生部81は判定条件を満たすと判断する。なお、対象の比較画素の値が0でないことが条件である。
【0125】
言い換えれば、第2中間データ発生部81は、以下の3つの条件を判定している。即ち、(1)比較画素aの値について、a≠0であって、相対航跡データW=a又はW=a+1の関係が成立するか否か、(2)比較画素bについて、b≠0であって、W=b又はW=b+1の関係が成立するか否か、及び、(3)比較画素cについて、c≠0であって、W=c又はW=c+1の関係が成立するか否かである。そして、(1)〜(3)の関係が何れか1つでも成立すれば、判定条件を満たしたことになるのである。例えば、検出画素の相対航跡データWがW=251、比較画素の値がそれぞれa=0、b=0、c=250の場合は、上記の(3)の関係が成立するので判定条件は満たされ、第2中間データHの値は251に設定されることになる。
【0126】
第2マーク判定部82は、予め設定された所定値Sと第2中間データHの値を比較することで、検出画素が、前記接近物標が現在存在している画素であるか否かを判定するように構成されている。なお、以下の説明では、接近物標が現在存在している画素を「接近物標存在画素」と称することがある。そして、第2マーク判定部82は、第2マークJを付けるか否かを上記の判定結果に応じて決定し、相対航跡用画像メモリ32に書き込む。なお、この第2マーク判定部82には、第2中間データHとともに、相対航跡用画像メモリ32から相対航跡データW及び過去の第2マークJ’が入力されている。
【0127】
具体的に説明すると、第2マーク判定部82は、検出画素が前記接近物標存在画素であると判定した場合は、第2マークJが付けられた旨を示すフラグ値(J=1)を、相対航跡用画像メモリ32の対応するアドレスに書き込む。一方で、検出画素が前記接近物標存在画素でない場合には、第2マーク判定部82は、第2マークが付けられなかった旨を示すフラグ値(J=0)を、相対航跡用画像メモリ32の対応するアドレスに書き込む。なお、前記所定値Sには、物標がその画素に存在することを示す相対航跡データWの値と同じ値が設定される。本実施形態では、相対航跡データWの最大値であり、物標が存在していることを示す255が所定値Sとして設定されている。
【0128】
ラインメモリ83は、第2中間データ発生部81から入力されてくる第2中間データHを1ライン分だけ記憶可能に構成されている。第2中間データ発生部81は、ラインメモリ83から比較画素a及びbの値を読み出すことができる。2つのシフト部84,85は、何れもシフトレジスタ等によって構成される遅延回路である。シフト部84は、入力されてくる第2中間データHを遅延させて比較画素cの値として第2中間データ発生部81に出力する。シフト部85は、ラインメモリ83から入力されるデータを遅延させて比較画素aの値として第2中間データ発生部81に出力する。
【0129】
第2中間データ発生部81は、所定方向で相対航跡データWの連続性を調べ、前記判定条件を満たすときには、相対航跡データWに対応する第2中間データHを検出画素に設定している。従って、第2中間データHは、相対航跡データWが所定方向で連続性を有していることを示すデータであるといえる。また、この第2中間データHには相対航跡データWの値と同じ値が設定されるので、第2中間データHが前記所定値Sと等しくなった場合、第1マークGが付けられた画素から、当該第1マークGに関する相対航跡の物標が現在存在する画素まで、所定の方向で相対航跡データWが連続していることを示すことになる。
【0130】
なお、ここでいう「所定の方向で」とは、当該方向が所定の角度範囲に含まれることを意味している。例えば、開始画素が左上隅の画素に設定されている場合(図13の場合)では、自船から見て前記接近物標が相対的に真右に移動している場合、真下に移動している場合、及び右下(終了画素側)に移動している場合に検出されることになる。
【0131】
前述したように、比較画素と検出画素との位置関係は、開始画素の位置によって決まる。従って、接近物標存在画素を検出できるときの当該接近物標の移動の向きは、開始画素の位置に応じて、以下のようになる。即ち、開始画素を右上隅の画素に設定した場合は、接近物標が相対的に真左に移動する場合、真下に移動する場合、及び左下に移動する場合に、当該接近物標が現在存在する画素(接近物標存在画素)を検出できることになる。開始画素を右下隅の画素に設定した場合は、接近物標が相対的に真左に移動する場合、真上に移動する場合、及び左上に移動する場合に、接近物標存在画素を検出できることになる。開始画素を左下隅の画素に設定した場合は、接近物標が相対的に真右に移動する場合、真上に移動する場合、及び右上に移動する場合に、接近物標存在画素を検出できることになる。
【0132】
従って、開始画素を4隅のそれぞれに設定して検出処理を行うことで、自船に対して接近物標がどの方向に相対移動している場合でも、第1マークGが付けられた画素から当該接近物標が現在存在する画素を検出し、第2マークJを付けることができる。本実施形態では、あらゆる方向に移動する接近物標についてその現在位置を検出するために、開始画素の位置を変更して検知処理を4回繰り返す。即ち、比較画素と検出画素との位置関係を変えることで、物標の移動を検出する所定方向ごとに接近物標の現在位置の検出処理を行っていくのである。なお、このスキャン方向の切替えについては後述する。
【0133】
次に、図14及び図15のフローチャートを参照して、必要な画素に第2マークJを付けるための具体的な処理について説明する。なお、図14及び図15を参照した説明において、開始画素の位置(アドレス)は左上隅に設定され、終了画素の位置(アドレス)は右下隅に設定されているものとする。
【0134】
接近物標の現在位置を探知する処理が開始されると、図14のフローが開始される。まず、第2中間データ発生部81は、検出画素のY座標(Yf+n)を決定するnの値が0であるか否かを調べることで、1ライン目の処理であるか否かを調べる(S401)。n=0である場合、つまり、1ライン目の処理である場合は、比較画素a及びbの値を0に設定する(S402)。n=0でない場合(2ライン目以降の場合)は、処理する画素が左端であるか否かを調べるために、mの値が0であるか否かを調べる(S403)。m=0である場合、つまり、処理する画素が左端である場合は、予めラインメモリ83に記憶されている比較画素bの値を取得する(S404)とともに、比較画素aの値を0に設定する(S405)。m=0でない場合は、予めラインメモリ83に記憶されている比較画素a及びbの値を取得する(S406)。
【0135】
次に、第2中間データ発生部81は、mの値に応じて比較画素cの値を設定する。より具体的には、検出画素のX座標(Xf+m)を決定するmの値が0であるか否かを調べる(S407)。m=0の場合は、比較画素cの値を0に設定する(S408)。m=0でない場合、シフト部84で遅延された1画素前の第2中間データHの値を比較画素cの値として設定する(S409)。
【0136】
次に、第2中間データ発生部81が相対航跡用画像メモリ32から相対航跡データW及び第1マークGを取得するとともに、第2マーク判定部82が相対航跡用画像メモリ32から相対航跡データW及び過去の第2マークJ’を取得する(S410)。そして、第2中間データ発生部81は、取得したGの値を調べ(図15のS411)、G=1である場合(即ち、当該検出画素が含まれる航跡が前記接近物標の相対航跡である場合)は、当該画素の相対航跡データWの値を第2中間データHの値として設定する(S412)。
【0137】
S411の処理において、G=0の場合は、前述の処理で設定した比較画素a,b,cの値と、相対航跡データWの値と、を比較し、前記判定条件を満たしているか否かを調べる(S413)。判定条件を満たしている場合には、第2中間データHの値として、当該検出画素の相対航跡データWの値を設定する(S412)。S413の判断で、判定条件を満たしていない場合は、第2中間データHの値を0に設定する(S414)。
【0138】
第2中間データ発生部81は、第2中間データHを第2マーク判定部82に出力するとともに、ラインメモリ83にも出力して、当該ラインメモリに第2中間データHを記憶させる(S415)。第2マーク判定部82は、受信した第2中間データHの値が所定値Sと等しいか否かを調べる(S416)。本実施形態では、第2中間データHの値が255であるか否かを調べる。第2中間データHの値が所定値Sと等しい場合は、接近物標が存在していると判定し、Jの値を1に設定する(S417)。
【0139】
S416の判断で第2中間データHが所定値Sと等しくない場合には、第2マーク判定部82は、当該画素が、前回のスキャンで接近物標存在画素として検出された画素であるか否かを調べる(S418)。即ち、上述したように、本実施形態ではあらゆる方向から接近する接近物標の現在位置を検出するために、相対航跡用画像メモリ32に記憶された相対航跡データWを調べるときに、スキャン方向を変更しながら接近物標存在画素の検出を4回繰り返す。そして、接近物標存在画素を検出できる相対航跡に係る物標の移動方向はスキャン方向に応じて異なるため、それまでに接近物標(接近物標存在画素)として検出されて第2マークJが付けられ、Jの内容として1が設定されていたものが、スキャン方向を変更して当該画素が接近物標として検出されなくなったときに、Jの値に0が上書きされてしまう場合がある。このような事態を防止するため、S416の判断で第2中間データHが所定値Sと等しくないと判定された場合でも、相対航跡用画像メモリ32に記憶される第2マークJ’(過去のJの値)が1であり、かつ相対航跡データWが最大値である255(所定値S)であるかを調べ(S418)、その条件を満たす場合にはJの値を1に設定するのである(S417)。S418の判断で過去のJ’の値が1でない場合(過去のスキャン処理によってJ=1が設定されていなかった場合)には、接近物標が存在していないと判定し、Jの値を0に設定する(S419)。
【0140】
なお、S418で相対航跡データWの値が所定値S(255)と等しいか否かを判断するのは、その画素の位置には既に接近物標が存在しなくなっているのに、レーダアンテナ1の1回転前のデータに基づいてJの内容に1が設定されている場合があり、この場合はJの内容を0にすべきだからである。
【0141】
そして、第2マーク判定部82は、S417又はS419の処理で設定されたJの値を相対航跡用画像メモリ32に書き込む(S420)。
【0142】
以上に示したS401〜S420の処理を図10に示す全画素に対して繰り返し行うことで、第2マークJが画素ごとに設定されていく。即ち、接近物標が現在存在していると判定された画素にはJ=1が設定され、それ以外の画素にはJ=0が設定される。
【0143】
次に、図16を参照して、第2マークJを書き込む一連の流れについて説明する。図16(a)は、接近物標の相対航跡に第1マークGを書き込む様子を示した模式図である。図16(b)は、接近物標の現在画素に第2マークJを書き込む様子を示した模式図である。
【0144】
相対航跡判定処理部33は、図16(a)に示すように、スイープライン上の相対航跡データWを調べることで、自船に向かってくる接近物標を検出する(図7及び図8のフローチャートを参照)。次に、接近物標探知処理部34は、図16(b)に示すように、第1マークGを起点として接近物標の相対航跡データWを辿り、相対航跡データWが最大値の画素(即ち、前記の接近物標存在画素)に到達したところで、当該画素に第2マークJを付ける(図14及び図15のフローチャートを参照)。これによって、第1マークGに基づいて接近物標の存在する位置を特定し、第2マークJを付けることが可能になる。
【0145】
次に、図17及び図18を参照して、スキャン方向と、物標の検出位置の関係について説明する。図17及び図18には、自船に接近しつつある4つの物標A、物標B、物標C及び物標Dの航跡が記憶された相対航跡用画像メモリ32の内容が概念的に示されている。物標Aは画面左上から、物標Bは画面右上から、物標Cは画面左下から、物標Dは画面右下から、それぞれ自船に向かって真っ直ぐ接近している。物標A〜Dは何れも接近物標に該当し、相対航跡判定処理部33の処理により、それぞれの物標の航跡における所定画素に第1マークGが付されている。そして、この相対航跡用画像メモリ32の記憶内容(前記相対航跡データW)に対し、図17(a)、図17(b)、図18(c)、図18(d)の順でスキャンが行われる。
【0146】
図17(a)では、開始画素を左上隅の画素に設定し、終了画素を右下隅の画素に設定する。そして、X軸方向のスキャンを右側に向かって行う。このスキャンでは、左上から接近してくる物標Aの存在位置が検出される。図17(b)では、開始画素を左下隅の画素に設定し、終了画素を右上隅の画素に設定する。そして、X軸方向のスキャンを右側に向かって行う。このスキャンでは、左下から接近してくる物標Cの存在位置が検出される。
【0147】
図18(c)では、開始画素を右下隅の画素に設定し、終了画素を左上隅の画素に設定する。そして、X軸方向のスキャンを左側に向かって行う。このスキャンでは、右下から接近してくる物標Dの存在位置が検出される。図18(d)では、開始画素を右上隅の画素に設定し、終了画素を左下隅の画素に設定する。そして、X軸方向のスキャンを左側に向かって行う。この方向でのスキャンでは、右上から接近してくる物標Bの存在位置が検出される。
【0148】
このように、4通りのスキャン方向で検出処理を行うことで、あらゆる方向から接近してくる接近物標の現在の位置を特定し、第2マークJを付ける(J=1を書き込む)ことが可能になる。また、相対航跡用画像メモリ32は、X軸方向の連続アクセスを高速に行うことができるSDRAM等によって構成されているので、真航跡用画像メモリ42の各画素へのアクセスを高効率で行うことができ、移動物標の検出を高速に行うことができる。そして、第2マークJが設定された画像データは、相対航跡用画像メモリ32からカラーパレット21に送信され(図1において省略)、第2マークJ(J=1)が設定されている画素が他の物標と異なるように強調して表示器19に表示される。これにより、例えば、接近物標が存在する位置に対応する画素が赤く描かれ、それ以外の物標は青く描かれるような画面表示が可能になる。
【0149】
なお、上記のような4通りのスキャン方向で接近物標の現在位置の検出を行う代わりに、図9や図16(a)に示す第1マークGを設定する処理(スイープラインに沿った処理)において、物標の現在位置を示す画素に第2マークJを付けてしまうことも不可能ではない。しかしながら、例えば図9(a)の例で、相対航跡データWが0、255、254、253、252、251、250、249の順で入力されたときに、この相対航跡が接近物標の航跡であることが判明するのは、Wの値として250が入力された時になる。従って、その時点で、Wの値として255が入力された画素に戻って第2マークJを付けることとすると、スイープラインの始端から終端へ(図9(a)においては、左から右へ)という処理手順の原則を外れることとなって、処理が複雑になってしまう。この点、本実施形態では別途スキャン処理を行って第2マークJを付けているので、スイープラインに関する処理を著しく簡素化することができる。
【0150】
また、本実施形態において接近物標の現在位置の検出を行う処理(第2マークJを付ける処理)の際に4通りの方向でスキャンを繰り返すのも、それぞれのスキャンにおいて処理する画素の順序の原則(例えば、図10に示す画素の処理順序の原則)を外れないようにすることで、検出処理を簡素化するためである。
【0151】
次に、図19及び図20を参照して、本実施形態のレーダ装置5(画像処理装置10)が備える警報システムについて説明する。図19は、自船と警報範囲の位置関係を示した模式図である。図20は、警報範囲に接近物標が存在するか否を検出する処理を示したフローチャートである。
【0152】
前述したようにレーダ装置5に搭載される画像処理装置10は、警報システムとして、警報範囲判定部36と、ブザー23と、警報範囲設定部37と、を備えている。警報範囲判定部36は、接近物標が警報範囲内に存在するか否かを判定するためのものである。ブザー23は、予め設定された警報範囲内に接近物標が入ると作動する発音装置である。警報範囲設定部37は、オペレータの操作により、警報範囲の設定、変更及び警報機能のON/OFF等の操作を行うことができる。
【0153】
図1に示すように、警報範囲判定部36には、エコーデータY、第2マークJ、距離r及びレーダアンテナ1の角度θが入力されている。警報範囲判定部36は、これらの情報に基づいて、接近物標が警報範囲内に存在するか否かを判定する。図19に示すように、警報範囲判定部36には、警報範囲を設定するパラメータとして、R1、R2、θ1及びθ2が設定されている。R1及びR2は、接近物標を検出する距離の範囲を決定するためのものであり、θ1及びθ2は、接近物標を検出する角度の範囲を決定するためのパラメータである。
【0154】
図20を参照して、警報装置の具体的な処理について説明する。警報範囲判定部36は、新しいエコーデータYがエコー強度計算部14から入力されると、図20のフローを開始する。まず、警報範囲判定部36は、エコーデータYが設定値以上か否かを調べる(S501)。エコーデータYの値が設定値未満である場合は、このフローを終了する。
【0155】
S501の処理で、エコーデータYが設定値以上である場合は、警報範囲内の接近物標の存在を調べていく。まず、警報範囲判定部36は、エコーデータYを検出したときの距離rがR1<r<R2の条件を満たすかを調べる(S502)。入力される距離rが条件を満たす場合、警報範囲判定部36は、エコーデータYが入力されたときのレーダアンテナ1の角度θがθ1<θ<θ2の条件を満たすかを調べる(S503)。S502及びS503の条件が何れも満たされている場合は、警報範囲判定部36は、エコーデータYに対応する画素のJの値を調べる(S504)。Jの値が1であれば、接近物標が警報範囲内に存在していることになるので、ブザー23を作動させる(S505)。S502からS504までの条件を1つでも満たさない場合には、報知部を作動させることなくこのフローを終了する。
【0156】
以上のフローによって、自船から離れていく物標には反応せず、自船に対して相対的に接近する物標にのみ反応する警報システムが実現される。なお、図20に示したフローでは、接近物標を検出しなかった場合は特に処理を行わずにフローを終了しているが、この構成は適宜変更できる。例えば、警報範囲に接近物標が検出されていない旨を適宜の記憶手段に記憶させる処理を行うようにすることもできる。
【0157】
以上に示したように、本実施形態のレーダ装置5に搭載される画像処理装置10は以下のように構成される。即ち、画像処理装置10は、相対航跡用画像メモリ32と、相対航跡判定処理部33と、を備える。相対航跡用画像メモリ32は、方位を異ならせて送信した探知信号に対して取得されたエコー信号により探知された物標の自船(探知信号を送信した送信位置)に対する相対的な位置変化を示す相対航跡データW群を記憶可能に構成される。相対航跡判定処理部33は、相対航跡用画像メモリ32に記憶される相対航跡データW群のうち、同じスイープライン上に存在する相対航跡データWに基づいて、探知信号により探知された物標が自船に接近する接近物標であるか否かを判定する。
【0158】
これにより、速度や方向等を考慮した複雑な計算を行うことなく、同じスイープライン上の相対軌跡データを調べるという簡単な処理で、探知信号により探知された物標が接近する物標であるか否かの判定を行うことができる。従って、接近物標を検出するための構成をシンプルにすることができ、低コスト化を実現できる。
【0159】
また、本実施形態の画像処理装置10は、相対航跡判定処理部33によって接近物標と判定された物標が他の物標と区別して表示されるように画像処理を行う。
【0160】
これにより、接近物標が他の物標と区別して表示されるので、ユーザは接近物標を直感的かつ即座に把握することができる。
【0161】
また、本実施形態の画像処理装置10は、相対航跡データW群に基づいて、物標とともにその物標の相対航跡が表示されるように画像処理を行うことができる。
【0162】
これにより、他の物標と区別して表示される接近物標とともに、物標が相対的に接近しているか否かを認識することが容易な相対航跡が表示されるので、接近物標との衝突の可能性の有無を迅速に判断することができる。また、接近物標と相対的に位置が変化しない物標とが区別して表示されるので、相対航跡が物標とともに表示されることによって、両者が紛らわしくなって判別できなくなる事態も防止できる。
【0163】
また、本実施形態の画像処理装置10は、以下のように構成される。即ち、相対航跡データWは、相対航跡用画像メモリ32を構成する画素単位で生成される情報であって、前記物標が直近に検出されてからの経過時間に応じて段階的に変化する情報である。そして、相対航跡判定処理部33は、スイープライン上で物標(即ち、値が255である相対航跡データW)が検出された場合に、図9の例に示すように、その検出位置を起点として当該自船(探知信号の送信位置)から離れる方向で、相対航跡データWの値が当該スイープライン上で画素的な連続性を保ちつつどの値まで連続的に減少するかを示す中間データFを生成する。相対航跡判定処理部33は、中間データFの値が設定値Tである場合(所定の条件を満たしながら変化する場合)に、その画素が、接近物標に係る相対航跡に含まれていると判定する。
【0164】
これにより、接近物標として検出する必要のない物標の小さな動きを検出しないように所定の条件を設定することで、実際に衝突のおそれのある物標の検出精度を向上させることができる。
【0165】
また、本実施形態の画像処理装置10においては、上記の設定値Tは変更可能である。
【0166】
これにより、使用する状況に応じた接近物標の検出感度を設定することができ、画像処理装置10の柔軟な運用が可能になる。
【0167】
また、本実施形態の画像処理装置10は、接近物標に係る相対航跡に含まれていると相対航跡判定処理部33によって判定された画素(第1マークGが付けられた画素)から、当該相対航跡の接近物標が現在存在する画素(接近物標存在画素)を前記相対軌跡データ群に基づいて求める接近物標探知処理部34を備える。
【0168】
これにより、自船に衝突するおそれがある接近物標の現在の位置を、簡素な構成で確実に検出することができる。
【0169】
また、本実施形態の画像処理装置10は、予め設定される警報範囲の内部に接近物標が存在することを検出する警報範囲判定部36と、この警報範囲判定部36によって接近物標が検出されると作動するブザー23と、を備える。
【0170】
これにより、現実に衝突の危険がある物標の存在だけを正確にユーザに知らせることができる警報システムを簡素な構成で提供することができる。
【0171】
次に、図21から図28までを参照して、第2実施形態の画像処理装置210が搭載されたレーダ装置5について説明する。第2実施形態の画像処理装置210は、真航跡用画像メモリ42に記憶されている真航跡データZに基づいた真航跡を表示器19に表示する際に、接近物標と判定された物標の真航跡を他の物標の真航跡と区別して表示できるように構成されている。なお、以下の説明において、前述の第1実施形態と同一及び類似する構成には、図面に同じ符号を付してその説明を省略する場合がある。
【0172】
図21は、第2実施形態の画像処理装置210が搭載されたレーダ装置5の構成を概略的に示したブロック図である。図21に示す画像処理装置210は、第1実施形態と同様に接近物標を検出できるように構成されている。なお、第1マークG及び第2マークJを相対航跡用画像メモリ32に記憶させる処理については、第1実施形態の画像処理装置10と同様の構成なので、その説明を省略する。
【0173】
図21に示すように、第2実施形態の画像処理装置210は、第1実施形態の構成に加えて、真航跡探知処理部234を備えている。
【0174】
また、本実施形態においては、真航跡用画像メモリ42には、前述の真航跡データ群のほか、後述するマーク(第3マークM)の有無についても画素ごとに記憶できるように構成されている。
【0175】
なお、スキャン用アドレス発生部35は、相対航跡用画像メモリ32に入力される相対航跡用アドレスを生成すると同時に、真航跡用画像メモリ42に入力される真航跡用アドレスを生成するようになっている。また、真航跡用画像メモリ42においては、相対航跡用画像メモリ32(図10を参照)と全く同様に複数の画素がXY直交座標系で配列されており、その画素の配列サイズ(縦M個、横N個)については相対航跡用画像メモリ32と同一となっている。そして本実施形態では、接近物標探知処理部34による相対航跡用画像メモリ32のスキャンと、真航跡探知処理部234による真航跡用画像メモリ42のスキャン(詳細は後述)とが、同期して行われるようになっている。この同期して行われるスキャンにおいて、接近物標探知処理部34がアクセスする相対航跡用画像メモリ32の画素と、真航跡探知処理部234がアクセスする真航跡用画像メモリ42の画素と、は自船位置に対する距離及び方位が同じ関係にある画素である。
【0176】
真航跡探知処理部234は、相対航跡用画像メモリ32に記憶された第2マークJに基づいて、接近物標の真航跡を他の真航跡と区別して表示するための第3マークMを真航跡用画像メモリ42に書き込むためのものである。
【0177】
図22を参照して、真航跡探知処理部234の構成について説明する。図22は、真航跡探知処理部234の構成を示したブロック図である。図22に示すように、真航跡探知処理部234は、第3中間データ発生部281と、第3マーク判定部282と、ラインメモリ283と、2つのシフト部284,285と、を備える。
【0178】
第3中間データ発生部281は、第3マーク判定部282が接近物標及びその航跡を検出する判定を行うための第3中間データKを生成する。第3中間データ発生部281には、真航跡用画像メモリ42から真航跡データZが入力されるとともに、相対航跡用画像メモリ32から第2マークJが入力されている。
【0179】
また、第3中間データ発生部281には、真航跡用画像メモリ42において検出画素の近傍に位置する比較画素a,b,cの値が入力されている。図23に示すように、この比較画素a,b,cと検出画素との位置関係は、第1実施形態で相対航跡用画像メモリ32に関して説明した比較画素a,b,cと検出画素との位置関係と全く同様である。比較画素a,b,cの値は、検出画素を検出する前に生成された第3中間データKであり、それぞれの画素に設定される。更に、第3中間データ発生部281には、検出画素のアドレスを特定するための変数m及びnが入力されている。
【0180】
この第3中間データ発生部281は、検出画素のアドレスに従って、(真航跡用画像メモリ42ではなく)相対航跡用画像メモリ32の内容を読み出し、検出画素が前記の接近物標存在画素であることを示す第2マークJ(J=1)を検出した場合は、真航跡用画像メモリ42に記憶されている検出画素の真航跡データZを第3中間データKに設定する。
【0181】
なお、真航跡用画像メモリ42には真航跡データZが記憶され、相対航跡用画像メモリ32には相対航跡データWが記憶される。ここで、自船の位置から物標が現在存在する画素の位置(即ち、値として255が設定される画素の位置)までの距離及び方向等の位置関係については、真航跡用画像メモリ42と相対航跡用画像メモリ32とで同じである。従って、メモリ上の自船の位置から同じ距離及び同じ方向に位置する画素は、相対航跡用画像メモリ32と、真航跡用画像メモリ42と、でその値が等しくなる。
【0182】
本実施形態では、このことを利用して、相対航跡用画像メモリ32で第2マークJが付けられた画素(接近物標存在画素)に対応する真航跡用画像メモリ42の画素を、マーク処理の起点となるトリガ画素としている。なお、このトリガ画素において、真航跡データZの値は常に255である。そして、当該トリガ画素を起点として真航跡データZの値を辿ることで、当該接近物標とその真軌跡の全体にわたって第3マークMを付けることとしているのである。また、前述の第1実施形態で説明した相対航跡用画像メモリ32のスキャンと全く同様の考え方で、本実施形態では真航跡用画像メモリ42についても、スキャン方向(開始画素の位置)を変更しながらスキャンが4回繰り返される。これにより、接近物標がどの方向に移動する場合でも、その真航跡について確実に第3マークMを付けることができる。
【0183】
また、第3中間データ発生部281は、検出画素の真航跡データZの値と前記比較画素の値とを比較し、所定の判定条件を満たす場合にも、当該検出画素の真航跡データZの値を第3中間データKの値として設定する。
【0184】
具体的には、第3中間データ発生部281は、真航跡データZの値が、比較画素aの値又は比較画素bの値又は比較画素cの値のうち少なくとも何れか1つと等しい値である又は比較画素の値より1だけ小さい値である場合に、判定条件を満たすと判断する。なお、比較画素の値が何れも0ではないことが条件である。
【0185】
言い換えれば、第3中間データ発生部281は、以下の3つの条件を判定している。即ち、(1)比較画素aについて、a≠0であって、真航跡データZ=a又はZ=a−1の関係が成立するか否か、(2)比較画素bについて、b≠0であって、Z=b又はZ=b−1の関係が成立するか否か、及び、(3)比較画素cについて、c≠0であって、Z=c又はZ=c−1の関係が成立するか否かである。そして、(1)〜(3)の関係が1つでも成立すれば、判定条件を満たしたことになるのである。
【0186】
第3マーク判定部282は、第3中間データKの値に基づいて、接近物標及びその航跡であることを示す第3マークMを真航跡用画像メモリ42に書き込むことができる。第3マーク判定部282は、第3中間データKの値に基づいて、接近物標が存在する画素と当該接近物標の航跡を示す画素とにM=1を設定し、それ以外の画素にはM=0を設定し、このMの値を、真航跡用画像メモリ42の対応するアドレスに記憶させる。
【0187】
図24及び図25のフローチャートを参照して、第3マークMを付ける具体的な処理について説明する。接近物標の真航跡探知処理が開始されると、図24のフローが開始される。以下の説明において、真航跡用画像メモリ42の検出処理中の画素のアドレスを(Xg+m,Yg+n)と表現することがある。なお、真航跡用画像メモリ42の開始画素の開始アドレスは(Xg,Yg)であるとし、終了画素の終了アドレスは(Xg+M−1,Yg+N−1)であるとする。そして、変数mは(M>m≧0)の条件を満たし、変数nは(N>n≧0)の条件を満たすものとする。
【0188】
第3中間データ発生部281は、検出画素のY座標(Yg+n)を決定するnの値が0であるか否かを調べることで、1ライン目の処理であるか否かを調べる(S601)。n=0である場合、比較画素a及びbの値を0に設定する(S602)。n=0でない場合(2ライン目以降の場合)は、処理する画素が左端であるか否かを調べるために、mの値が0であるか否かを調べる(S603)。m=0である場合、つまり、処理する画素が左端である場合は、予めラインメモリ283に記憶されている比較画素bの値を取得する(S604)とともに、比較画素aの値を0に設定する(S605)。m=0でない場合は、予めラインメモリ283に入力されていた比較画素a及びbの値を取得する(S606)。
【0189】
次に、第3中間データ発生部281は、mの値に応じて比較画素cの値を設定する。より具体的には、検出画素のX座標(Xg+m)を決定するmの値が0であるか否かを調べる(S607)。そして、m=0の場合は、cの値を0に設定する(S608)。m=0でない場合、シフト部284から遅延されてきた第3中間データKの値をcの値として設定する(S609)。
【0190】
次に、第3中間データ発生部281が第2マークJを相対航跡用画像メモリ32から取得するとともに真航跡用画像メモリ42から真航跡データZを取得し、また、第3マーク判定部282が、真航跡用画像メモリ42から真航跡データZ及び過去の第3マークM’を取得する(S610)。そして、第3中間データ発生部281は、当該画素に前記接近物標が存在しているか否かをJの値に基づいて調べ(S611)、接近物標が存在している場合(即ち、当該画素が前記接近物標存在画素である場合、J=1である場合)は、真航跡データZの値を第3中間データKの値に設定する(S612)。
【0191】
S611の処理の条件を満たしていない場合(J=0の場合)、第3中間データ発生部281は、真航跡データZの値と、前述の処理で設定した比較画素a,b,cの値と、を比較して、前記の判定条件を満たしているか否かを調べる(S613)。判定条件を満たしている場合には、当該真航跡データZの値を第3中間データKの値として設定する(S612)。S613の処理で、判定条件を満たしていない場合は、第3中間データKの値を0に設定する(S614)。
【0192】
次に、第3中間データ発生部281は、設定した第3中間データKを第3マーク判定部282に出力するとともに、ラインメモリ283にも出力し、当該ラインメモリ283に第3中間データKを記憶させる(S615)。第3マーク判定部282は、受信した第3中間データKの値が0より大きいか否かを調べる。(S616)。第3中間データKが0より大きい場合は、当該画素におけるMの値を1に設定する(S617)。これによって、接近物標及びその真航跡データが存在する画素にM=1が設定される(第3マークMが付けられる)ことになる。
【0193】
また、S616の判断で第3中間データKの値が0である場合は、第3マーク判定部282は、真航跡用画像メモリ42に記憶されるM’の値(過去のMの値)を調べる(S618)。即ち、上述したように、本実施形態ではあらゆる方向に移動する接近物標の真航跡を検出するために、スキャン方向を変更しながら接近物標の真航跡の検出処理を4回繰り返す。そして、検出可能な接近物標の真航跡はスキャン方向に応じて異なるため、それまでに接近物標又はその真航跡として検出されてMの内容として1が設定されていたものが、スキャン方向を変更して当該画素が接近物標(真航跡)として検出されなくなったときに、Mの内容に0が上書きされてしまう場合がある。このような事態を防止するため、S616の判断で第3中間データKの値が0であった場合でも、過去の第3マークを示すM’の値が1であり、かつ真航跡データZの値が0より大きいか否かを調べ(S618)、その条件を満たす場合は、Mの値を1に設定するのである(S617)。S618の判断で過去のM’の値が1でない場合(過去のスキャン処理によってM=1が設定されていなかった場合)には、Mの値を0に設定する(S619)。
【0194】
なお、S618で真航跡データZの値が0より大きいか否かを判断するのは、その画素の位置には既に物標や真航跡が存在しなくなっているのに、レーダアンテナ1の1回転前のデータに基づいてMの内容に1が設定されている場合があり、この場合はMの内容を0にすべきだからである。
【0195】
第3マーク判定部282は、S617又はS619の処理で設定されたMの値を真航跡用画像メモリ42に書き込む(S620)。
【0196】
以上に示したS601〜S620の処理を真航跡用画像メモリ42の全画素に対して繰り返し行うことで、真航跡用画像メモリ42の各画素に第3マークMが設定される。そして、この検出処理を開始画素の位置を変更しながら4回行うことで、あらゆる方向に移動する接近物標の真航跡を検出し、真航跡用画像メモリ42に第3マークMとして記憶することができる。
【0197】
図26は、第2マークJに基づいて第3マークMを書き込む様子を示した模式図である。図26(a)に示すように、画像処理装置210は、相対航跡データWに基づき、第1マークG及び第2マークJを、相対航跡用画像メモリ32において所定の画素に付ける。そして画像処理装置210は、図26(b)に示すように、相対航跡用画像メモリ32において第2マークJが付けられた画素に対応する真航跡用画像メモリ42の画素から真航跡を辿ることで、接近物標とその真航跡に第3マークMを設定する。
【0198】
次に、図27及び図28を参照して、スキャン方向の切替えについて具体的に説明する。図27及び図28には、自船に接近しつつある4つの物標A、物標B、物標C及び物標Dの航跡が記憶された真航跡用画像メモリ42の内容が概念的に示されている。物標Aは画面左上から、物標Bは画面右上から、物標Cは画面左下から、物標Dは画面右下から、それぞれ自船に接近している。
【0199】
なお、図27及び図28に示される真航跡データの例において、一見して物標A〜Dは自船の近くを通過するだけであり、自船に対しては衝突しないようにも見える。しかし、今回の例では自船は基準方位(画面の真上)に向かって一定速度で移動しているので、この例に対応する相対航跡データは図17及び図18のようになる。即ち、真航跡データZでは若干わかりにくいが、図27及び図28に示す物標A〜Dは、何れも前記接近物標に該当し、自船に衝突する危険がある。従って、相対航跡用画像メモリ32においては、前記接近物標探知処理部34により、物標A〜Dそれぞれの現在の位置に相当する画素に第2マークJが付けられている。
【0200】
以下、真航跡用画像メモリ42のスキャンについて説明する。まず、図27(a)に示すように、開始画素を左上隅の画素に設定し、終了画素を右下隅の画素に設定してスキャンが行われる。このスキャンにより、物標Dの現在位置とその航跡に第3マークM(M=1)が設定される。次に、図27(b)に示すように、開始画素を左下隅の画素に設定し、終了画素を右上隅の画素に設定してスキャンが行われる。これにより、物標Bの現在位置とその航跡に第3マークM(M=1)が設定される。続いて、図28(c)に示すように、開始画素を右下隅の画素に設定し、終了画素を左上隅の画素に設定してスキャンが行われる。これにより、物標Aの現在位置とその航跡に第3マークM(M=1)が設定される。最後に、図28(d)に示すように、開始画素を右上隅の画素に設定し、終了画素を左下隅の画素に設定してスキャンが行われる。これにより、物標Cの現在位置とその航跡に第3マークM(M=1)が設定される。
【0201】
以上の処理によって、あらゆる方向から接近する前記接近物標とその航跡に対応する画素に第3マークM(M=1)を設定し、真航跡用画像メモリ42に記憶することができる。本実施形態において真トレイルモードが選択された場合、真航跡用画像メモリ42からカラーパレット21に送信された画像データは、第3マークM(M=1)が設定されている画素が他の物標と異なるように強調して表示器19に表示される。これにより、例えば、相対的に自船に真っ直ぐ向かってくる物標(接近物標)及びその真航跡は赤く描かれ、それ以外の物標及びその真航跡は青く描かれるような画面表示が可能になる。
【0202】
なお、前述したように、図27及び図28に示す真航跡用画像メモリ42のスキャンは、図17及び図18に示す相対航跡用画像メモリ32のスキャンと同時並行的に行われる。即ち、スキャン用アドレス発生部35は、相対航跡用画像メモリ32に記憶されている相対航跡データをスキャンするための相対航跡スキャン用アドレスを生成するとともに、真航跡用画像メモリ42に記憶されている真航跡データをスキャンするための真航跡スキャン用アドレスを生成する。これらのスキャン用アドレスに基づいて、相対航跡用画像メモリ32で、ある位置の画素について第2マークJの処理が行われるとき、真航跡用画像メモリ42においては、第2マークJの処理が行われた画素の位置(相対航跡用画像メモリ32上の画素位置)に対応する位置の画素(真航跡用画像メモリ42上の画素位置)について第3マークMの処理が行われる。従って、図17(a)のスキャンと図27(a)のスキャンが並行して行われ、次に図17(b)のスキャンと図27(b)のスキャンが並行して行われ、・・・というように、2つの航跡用画像メモリのスキャンが同時進行的に処理される。これにより、処理時間を短縮することができる。
【0203】
以上に示したように、本実施形態の画像処理装置210は、複数の航跡データを、前記物標の絶対的な位置変化を示す真航跡データ群として記憶可能な真航跡用画像メモリ42を備える。そして、当該画像処理装置210は、真航跡データ群に基づいて、物標とともにその物標の真航跡が表示されるように画像処理を行う。
【0204】
これにより、絶対的な位置変化を示すため、自船(レーダアンテナ1が探知信号を送信した送信位置)に対して相対的に接近しつつあるか否かを即座に判断できないような真航跡データ群に基づいて航跡を表示する場合であっても、接近物標が他の物標と区別して表示されるので、衝突の危険性を即座かつ直感的に判断できる。
【0205】
また、本実施形態の画像処理装置210は、相対航跡判定処理部33によって接近物標と判定された物標の真航跡が、他の物標の真航跡と区別して表示されるように画像処理を行う。
【0206】
これにより、接近物標だけではなく真航跡が区別して表示されるので、衝突の危険性をより直感的に判断できる。なお、相対トレイルモードを選択した場合において、接近物標の相対航跡が他の物標の相対航跡と区別して表示されるように画像処理を行うように構成することもできる。
【0207】
以上に本発明の実施形態を説明したが、上記の構成は更に以下のように変更することができる。
【0208】
第1実施形態の画像処理装置10は、相対航跡のみを表示する構成に変更することができる。同様に、第2実施形態の画像処理装置210は、真航跡のみを表示する構成に変更することもできる。また、第1実施形態の画像処理装置10及び第2実施形態の画像処理装置210の何れにおいても、画面上に航跡を表示しないように設定することも可能である。
【0209】
第1実施形態の画像処理装置10が搭載されるレーダ装置5の警報システムは、接近物標が警報範囲に入ったことによって報知部が作動する構成であれば、事情に応じて適宜変更することができる。例えば、報知部をブザー23から警告ランプ等のようなオペレータの視覚に訴える手段に変更することもできる。また、表示器19に「接近物標を検出中!!」等の文字を表示する構成に変更することもできる。
【0210】
前記警報システムに設定される警報範囲は、図19のような形状とすることに限定されない。例えば、前記警報範囲を、自船を中心とする所定半径の円の領域とすることができる。
【0211】
第2実施形態の画像処理装置210において、接近物標とその航跡を区別して表示する構成は、事情に応じて適宜変更することができる。例えば、接近物標の現在位置だけを他の物標とは異なる色で表示させたり、接近物標だけについて、その現在位置(又は真航跡)を点滅表示させたりする構成に変更することができる。
【0212】
また、本実施形態の画像処理装置10は、レーダ装置5に搭載される構成であるが、この構成に限定される訳ではない。例えば、画像処理装置をレーダ装置と独立して別個に配置し、画像処理装置がレーダ装置と通信のやり取りを行って画像処理を行う構成にすることもできる。
【0213】
また、上記実施形態では、マーク(第1マークG、第2マークJ及び第3マークM)は、所定の条件の下で相対航跡データW又は真航跡データZの値が1ずつ増加又は減少する場合に、連続性を有するように設定される中間データ(中間データF、第2中間データH及び第3中間データK)の値に基づいて設定されている。しかし、マークの設定方法は、上記実施形態の方法に限定される訳ではなく、事情に応じて適宜変更することが可能である。次に、マークの設定方法の変形例について説明する。
【0214】
まず、第1マークGの設定(中間データFの設定)方法の変形例について説明する。例えば、相対航跡判定処理部33が、図7のS205の判断において、以下の条件に基づいて中間データFの値を設定するように構成することもできる。即ち、S205の判断において、検出画素の相対航跡データWの値が、W=255−(F’+(0〜2))の関係を満たすか否かに基づいて連続性の有無を判定する。そして、上記関係が成立すれば、連続性を満たしていると判断し、連続性を満たすように、相対航跡データの値に応じて中間データを適宜の値に設定する。
【0215】
このように、相対航跡データWの連続性の有無を判断する際の条件に幅を持たせて中間データを生成することで、自船に対して相対的に低速で移動する船においても、接近物標として検出することができる。より具体的には、注目する物標が低速で移動している場合、物標が存在する画素(画素情報の値が255の画素)側から相対航跡データWの値が252、249・・・の順に並ぶような場合がある。このような場合でも、上記方法を採用することで、中間データが連続性を有するように生成されることになる。これによって、低速で移動している物標を接近物標としてより確実に検出することが可能になる。
【0216】
次に、隣接する画素を考慮することにより、連続性を検出できるように中間データを生成する方法について説明する。例えば、レーダアンテナ1が1回転する間に、物標が2画素分以上相対的に移動することがある。このような場合では、航跡データ発生部41によって設定される航跡データの値は、スイープライン上で255、0、254、0、253・・・のように並び、現実には自船に対して相対的に移動している物標であっても、スイープライン上で隣り合う相対航跡データWの値が連続性を有しない場合がある。
【0217】
このような場合でも、隣接する画素を考慮することにより、連続性を検出できるように中間データを生成することが可能である。より具体的には、0が検出された画素と、スイープライン上で隣り合う画素と、を比較し、スイープライン方向で0を挟み込む画素の相対航跡データWの値が連続性を有している場合には、0を挟み込んでいる画素の相対航跡データの値に応じて中間データFを生成する。例えば、254、0、253の順にスイープライン方向で相対航跡データWの値が並んでいた場合、0をスイープライン方向で挟んで位置する画素の相対航跡データWの値である254と253を比較する。この254と253は、連続性を有しているので、0の画素には、253(又は254)の値に基づいて中間データFが連続性を有するように生成される。
【0218】
なお、間に存在する0の数をいくつ許容するかは、レーダの表示レンジや画像メモリの画素数等に応じて適宜設定することができる。例えば、254、0、0、253の順に相対航跡データWの値が並んでいる場合においても、0を挟み込んでいる254と253との値に基づいて相対航跡データの値が連続性を有しているとみなして、その値に応じた中間データを生成することができる。これにより、物標が相対的に高速移動している場合でも、その物標を接近物標として判定することができる。
【0219】
次に、第2マークJの設定(第2中間データHの設定)方法の変形例について説明する。例えば、第2マークJの設定方法においては、図15のS413の処理の判定条件を以下のように設定することができる。即ち、比較画素aの値がa≠0であって、相対航跡データW=a又はW=a+(1〜3)の条件を満たすときに、連続性を満たすと判定するように判定条件を設定する。なお、比較画素b及び比較画素cについても、比較画素aと同様の条件に設定する。この判定条件に基づいて設定された第2中間データHが所定値Sと一致した場合に、その画素に第2マークJが付けられる(J=1に設定される)のである。このように判定条件を設定することで、注目する物標が低速で移動している場合でも、接近物標に対応する画素に第2マークJを適切に付与することができるのである。なお、第2マークJの設定方法においても、第1マークGの設定の変形例と同様に、0を許容する処理を行うことで、高速移動している物標に対応することができる。
【0220】
更に、第2実施形態の第3マークMの設定方法においても、幅を持たせて第3中間データKを生成するように構成することができる。例えば、第3マークMの設定方法においては、図25のS613の処理の判定条件を以下のように設定することができる。即ち、真航跡データZ=a又はZ=a−(1〜3)の条件を満たすときに、第3中間データKの値に真航跡データZの値を設定し、条件を満たさない場合には、第3中間データKの値に0を設定するのである。なお、比較画素b及び比較画素cについても、この変形例の比較画素aと同様の条件に設定する。このように判定条件を設定することで、注目する物標が低速で移動している場合でも、接近物標及びその航跡に対応する画素に第3マークMを適切に付与することができるのである。なお、第3マークMの設定方法においても、第1マークGの設定の変形例と同様に、0を許容する処理を行うことで、高速移動している物標に対応することができる。
【符号の説明】
【0221】
5 レーダ装置
10 画像処理装置
19 表示器
23 ブザー(報知部)
32 相対航跡用画像メモリ(相対軌跡用画像メモリ)
33 相対航跡判定処理部(接近物標判定処理部)
34 接近物標探知処理部(接近物標位置取得部)
36 警報範囲判定部
41 航跡データ発生部(軌跡データ発生部)
42 真航跡用画像メモリ(真軌跡用画像メモリ)
51 第1中間データ発生部(中間データ発生部)
52 第1マーク判定部(中間データ判定部)
【技術分野】
【0001】
本発明は、送信した探知信号に対して取得されたエコー信号に基づく情報を画像として表示するための処理を行う画像処理装置に関するものである。
【背景技術】
【0002】
船舶の航行において、エコー信号に基づく情報を処理して画像として表示するための画像処理装置が搭載されたレーダ装置を用いて自船の周囲に存在する物標を検出し、自船と物標との位置関係を把握することは、他船との衝突の回避に有効な方法である。特に、夜間や濃霧発生時等の視界が良好でない状況では、レーダ装置の利用が必要不可欠なものになる。なお、この種のレーダ装置においては、レーダ画面に表示する画像等を生成するために、前記エコー信号に基づく情報に対して適宜の処理を行う画像処理装置を備えることが多い。
【0003】
しかし、オペレータがレーダ映像に不慣れである場合には、画面上のエコー源(物標を示す表示)が航海の障害となるか否かを判断することが難しかった。また、オペレータがレーダ映像に精通している場合であっても、少なくとも数スキャンの間画面を見続けない限り、衝突の危険度を判断することが困難であった。
【0004】
そこで、レーダ装置の利用を補助する自動衝突予防援助装置(Automatic Radar Plotting Aids、ARPA)を備えるレーダ装置が利用されることがある。このARPAは、レーダ装置からリアルタイムに得られる自船と他船の相対位置、相対方位等の情報に基づいて、他船の進路や他船と自船が最も接近する位置までの時間等を計算する機能を有する。そして、その計算結果を画面上に表示することで、オペレータに対して衝突回避に必要な情報を視覚的にわかり易く提供するものである。この種のARPAを備えたレーダ装置を開示するものとして特許文献1がある。
【0005】
特許文献1は、衝突危険度の高い他船は視認性を高く表示し、衝突危険度の低い他船は視認性を低く表示するように構成した他船表示装置を開示する。特許文献1は、これにより、視認性が高く、衝突回避という目的に適った表示を行うことができるとする。
【0006】
また、レーダ装置において、予め画面上に設定された警報範囲内に物標が検出されると、ブザー等の報知手段を作動させて、自船に接近する物標が存在することをオペレータに知らせる警報システムを備えるものが知られている。
【0007】
更に、レーダ装置において、他船(物標)の現在位置と、その航跡(移動軌跡)を画面上に表示するいわゆるトレイル機能を有するものがある。この航跡の表示形式としては、自船に対する相対的な位置変化を航跡として表示する相対トレイルモード(相対航跡表示形式)と、絶対的な位置変化を航跡として表示する真トレイルモード(真航跡表示形式)と、が従来から知られている。相対トレイルモードでは、自船に対する他船の相対的な位置変化が航跡として画面上に表示される。真トレイルモードでは、自船の動きとは無関係に、陸地等の固定物標に対する物標の現実の位置変化が航跡として画面上に表示される。オペレータは、これらのトレイル機能を状況や好みによって使い分け、他船の進行方向の予測や衝突の回避等に役立てていた。
【先行技術文献】
【特許文献】
【0008】
【特許文献1】特開2003−48595号公報
【発明の概要】
【発明が解決しようとする課題】
【0009】
特許文献1に示すようなARPAは、他船との衝突を回避するための情報をわかり易く直感的に画面上に表示できる。しかし、物標の捕捉、追尾動作等の技術的に高度な処理が必要になるため、内部の処理が複雑化し、回路規模の大型化の原因にもなっていた。従って、製造コストの低減という観点から改善の余地があった。
【0010】
この点、レーダ装置に警報範囲を設定する方法は、ARPAのように計算等を行う必要がなく、低コストで物標の接近を検出する構成を実現できるメリットがある。しかし、警報範囲に入った物標を接近物標として単純に判定してしまうため、自船から離れるように移動しているような衝突の危険性がない物標であっても、警報範囲に入ると報知手段が一律に作動してしまっていた。
【0011】
また、トレイル機能を利用して物標の接近を判断する場合においても、表示形式によって以下のような課題があった。即ち、相対トレイルモードでは、物標の自船に対する相対的な位置変化が航跡で表示される構成のため、自船が移動している場合には、現実には移動していない固定物標にも航跡が表示されてしまう。そのため、多数の物標が存在する海域では、表示画面上に多数の航跡が表示され、移動物標であるか固定物標であるかの識別が困難であった。この点、真トレイルモードでは、物標の絶対的な位置変化が航跡で表示される構成のため、自船が移動している場合であっても、陸地等の固定物標には航跡が表示されない。しかしながら、真トレイルモードでは、他船の現実の位置変化が表示されるため、相対トレイルモードのように他船が自船に接近しているか否かを直感的に判断することが困難であった。
【0012】
本発明は以上の事情に鑑みてなされたものであり、その目的は、画像処理装置において、物標の接近を検出する簡素な構成を実現するとともに、接近物標が存在することをオペレータが直感的に把握できるように画像処理を行う構成を提供することにある。
【課題を解決するための手段及び効果】
【0013】
本発明の解決しようとする課題は以上の如くであり、次にこの課題を解決するための手段とその効果を説明する。
【0014】
本発明の第1の観点によれば、以下のように構成される画像処理装置が提供される。即ち、画像処理装置は、相対軌跡用画像メモリと、接近物標判定処理部と、を備える。前記相対軌跡用画像メモリは、方位を異ならせて送信した探知信号に対して取得されたエコー信号により探知された物標の、前記探知信号を送信した送信位置に対する相対的な位置変化を示す相対軌跡データ群を記憶可能に構成される。前記接近物標判定処理部は、前記相対軌跡用画像メモリに記憶される前記相対軌跡データ群のうち、同じスイープライン上に存在する相対軌跡データに基づいて、前記探知信号により探知された物標が前記送信位置に接近する接近物標であるか否かを判定する。
【0015】
これにより、速度や方向等を考慮した複雑な計算を行うことなく、同じスイープライン上の相対軌跡データを調べるという簡単な処理で、探知信号により探知された物標が接近する物標であるか否かの判定を行うことができる。従って、接近物標を検出するための構成をシンプルにすることができ、低コスト化を実現できる。
【0016】
前記の画像処理装置においては、前記接近物標判定処理部によって前記接近物標と判定された物標が他の物標と区別して表示されるように画像処理を行うことが好ましい。
【0017】
これにより、接近物標が他の物標と区別して表示されるので、ユーザは接近物標を直感的かつ即座に把握することができる。
【0018】
前記の画像処理装置においては、前記相対軌跡データ群に基づいて、物標とともにその物標の相対軌跡が表示されるように画像処理を行うことが好ましい。
【0019】
これにより、他の物標と区別して表示される接近物標とともに、物標が相対的に接近しているか否かを認識することが容易な相対軌跡が表示されるので、接近物標との衝突の可能性の有無を迅速に判断することができる。また、接近物標と相対的に位置が変化しない物標とが区別して表示されるので、相対軌跡が物標とともに表示されることによって、両者が紛らわしくなって判別できなくなる事態も防止できる。
【0020】
前記の画像処理装置においては、以下のように構成されることが好ましい。即ち、画像処理装置は、エコー信号により探知された物標の絶対的な位置変化を示す真軌跡データ群を記憶可能な真軌跡用画像メモリを備える。前記真軌跡データ群に基づいて、物標とともにその物標の真軌跡が表示されるように画像処理を行う。
【0021】
これにより、絶対的な位置変化を示すため、探知信号の送信位置(自移動体)に対して相対的に接近しつつあるか否かを即座に判断できないような真軌跡データ群に基づいて真軌跡を表示する場合であっても、接近物標が他の物標と区別して表示されるので、衝突の危険性を即座かつ直感的に判断できる。
【0022】
前記の画像処理装置においては、前記接近物標判定処理部によって前記接近物標と判定された物標の相対軌跡又は真軌跡が、他の物標の相対軌跡又は真軌跡と区別して表示されるように画像処理を行うことが好ましい。
【0023】
これにより、接近物標だけではなく相対軌跡又は真軌跡が区別して表示されるので、衝突の危険性をより直感的に判断できる。
【0024】
前記の画像処理装置においては、以下のように構成されることが好ましい。即ち、前記相対軌跡データは、前記相対軌跡用画像メモリを構成する画素単位で生成される情報であって、前記物標が直近に検出されてからの経過時間に応じて段階的に変化する情報である。そして、前記接近物標判定部は、前記スイープライン上で物標が検出された場合に、その検出位置を起点として前記送信位置から離れる方向で、前記相対軌跡データの値が当該スイープライン上で画素的な連続性を保ちつつ所定の条件を満たしながら変化する場合に、その画素が、前記接近物標に係る相対軌跡に含まれていると判定する。
【0025】
これにより、接近物標として検出する必要のない物標の小さな動きを検出しないように所定の条件を設定することで、実際に衝突のおそれのある物標の検出精度を向上させることができる。
【0026】
前記の画像処理装置においては、前記所定の条件は変更可能であることが好ましい。
【0027】
これにより、使用する状況に応じた接近物標の検出精度を設定することができ、画像処理装置の柔軟な運用が可能になる。
【0028】
前記の画像処理装置においては、前記接近物標に係る相対軌跡に含まれていると前記接近物標判定処理部によって判定された画素から、当該相対軌跡の前記接近物標が現在存在する画素を前記相対軌跡データ群に基づいて求める接近物標位置取得部を備えることが好ましい。
【0029】
これにより、衝突するおそれがある接近物標の現在の位置を、簡素な構成で確実に検出することができる。
【0030】
前記の画像処理装置においては、以下のように構成されることが好ましい。即ち、画像処理装置は、予め設定される警報範囲の内部に前記接近物標が存在することを検出する警報範囲判定部と、前記警報範囲判定部によって前記接近物標が検出されると作動する報知部と、を備える。
【0031】
これにより、現実に衝突の危険がある物標の存在だけを正確にユーザに知らせることができる警報システムを簡素な構成で提供することができる。
【0032】
本発明の第2の観点によれば、前記の画像処理装置を搭載したレーダ装置が提供される。
【0033】
本発明の第3の観点によれば、以下のステップを含む画像処理方法が提供される。即ち、画像処理方法は、方位を異ならせて送信した探知信号に対して得られるエコー信号を取得するエコー信号取得ステップと、前記エコー信号により探知された物標の、前記探知信号を送信した送信位置に対する相対的な位置変化を示す相対軌跡データ群を記憶させるステップと、前記相対軌跡データ群のうち、同じスイープライン上に存在する相対軌跡データに基づいて、前記探知信号により探知された物標が前記送信位置に接近する接近物標であるか否かを判定するステップと、を含む。
【0034】
これにより、速度や方向等を考慮した複雑な計算を行うことなく、同じスイープライン上の相対軌跡データを調べるという簡単な方法で、探知信号により探知された物標が接近する物標であるか否かの判定を行うことができる。
【0035】
本発明の第4の観点によれば、以下のような画像処理プログラムが提供される。即ち、この画像処理プログラムによってコンピュータが実行する処理は、方位を異ならせて送信した探知信号に対して得られるエコー信号を取得するエコー信号取得ステップと、前記エコー信号により探知された物標の、前記探知信号を送信した送信位置に対する相対的な位置変化を相対軌跡データ群として記憶させるステップと、前記相対軌跡データ群のうち、同じスイープライン上に存在する相対軌跡データに基づいて、前記探知信号により探知された物標が前記送信位置に接近する接近物標であるか否かを判定するステップと、を含む。
【0036】
これにより、速度や方向等を考慮した複雑な計算を行うことなく、スイープライン方向の相対軌跡データを調べるという簡単な処理で、探知信号により探知された物標が接近する物標であるか否かの判定をコンピュータに実行させることができる。このように、接近物標を判定するための処理をシンプルにすることができるので、コンピュータの演算コストを効果的に低減できる。
【図面の簡単な説明】
【0037】
【図1】本発明の第1実施形態に係る画像処理装置が搭載されたレーダ装置の構成を概略的に示したブロック図。
【図2】基準方位とスイープ角度の関係を示した模式図。
【図3】航跡データ発生部の構成を示したブロック図。
【図4】エコーデータから航跡データを生成する処理を示したフローチャート。
【図5】航跡データの分布例を示した模式図。
【図6】相対航跡判定処理部の構成を示したブロック図。
【図7】相対航跡判定処理部による接近物標の判定処理の前半を示したフローチャート。
【図8】相対航跡判定処理部による接近物標の判定処理の後半を示したフローチャート。
【図9】相対航跡データの分布例及び中間データの値の推移を示した模式図。
【図10】スキャン用アドレス発生部によって決定されたアドレスに従って、検出処理を行う様子を示した模式図。
【図11】スキャン用アドレス発生部によるアドレスを生成する処理を示したフローチャート。
【図12】接近物標探知処理部の構成を示したブロック図。
【図13】相対航跡の探知処理において、比較に用いられる画素と検出処理中の画素との位置関係を示した模式図。
【図14】接近物標探知処理部による物標の位置を検出する処理の前半を示したフローチャート。
【図15】接近物標探知処理部による物標の位置を検出する処理の後半を示したフローチャート。
【図16】第1マークGに基づいて第2マークJを書き込む様子を示した模式図。
【図17】第1マークGに基づいて第2マークJを書き込む処理をスキャン方向ごとに示した模式図。
【図18】第1マークGに基づいて第2マークJを書き込む処理をスキャン方向ごとに示した模式図。
【図19】自船と警報範囲の位置関係を示した模式図。
【図20】警報範囲に接近物標が存在するか否を検出する処理を示したフローチャート。
【図21】第2実施形態の画像処理装置が搭載されたレーダ装置の構成を概略的に示したブロック図。
【図22】真航跡探知処理部の構成を示したブロック図。
【図23】真航跡の探知処理において、比較に用いられる画素と検出処理中の画素との位置関係を示した模式図。
【図24】第3マークMを書き込む処理の前半を示したフローチャート。
【図25】第3マークMを書き込む処理の後半を示したフローチャート。
【図26】第2マークJに基づいて第3マークMを書き込む様子を示した模式図。
【図27】第2マークJに基づいて第3マークMを書き込む処理をスキャン方向ごとに示した模式図。
【図28】第2マークJに基づいて第3マークMを書き込む処理をスキャン方向ごとに示した模式図。
【発明を実施するための形態】
【0038】
次に発明の実施の形態について説明する。図1は、本発明の第1実施形態に係る画像処理装置10が搭載されたレーダ装置5の構成を概略的に示したブロック図である。図2は、基準方位とスイープ角度の関係を示した模式図である。
【0039】
本実施形態のレーダ装置5は、舶用機器として船舶に用いられるものである。図1に示すように、レーダ装置5は、レーダアンテナ1と、表示器19と、を備える。また、このレーダ装置5には、画像処理を行うための画像処理装置10が備えられており、この画像処理装置10は、受信部11と、A/D変換部12と、スイープメモリ13と、エコー強度計算部14と、表示用画像メモリ15と、描画アドレス発生部16と、表示用アドレス発生部20と、カラーパレット21と、を備えている。
【0040】
また、レーダ装置5は、他船の航跡(物標の移動軌跡)を表示する機能を有している。この機能を実現するために、前記画像処理装置10には、航跡データ発生部(軌跡データ発生部)41と、相対航跡用画像メモリ(相対軌跡用画像メモリ)32と、真航跡用画像メモリ(真軌跡用画像メモリ)42と、相対航跡判定処理部(接近物標判定処理部)33と、接近物標探知処理部(接近物標位置取得部)34と、スキャン用アドレス発生部35と、が備えられている。
【0041】
画像処理装置10は、前記航跡の表示形式として、相対トレイルモード(相対軌跡表示形式)と、真トレイルモード(真軌跡表示形式)と、の何れかを選択可能に構成されており、この表示形式を選択するための表示航跡設定部22を備えている。相対トレイルモードは、自船に対する他船の相対的な位置変化を示す相対航跡を表示器19に表示するモードである。また、真トレイルモードは、他船の絶対的な位置変化を示す真航跡を表示器19に表示するモードである。
【0042】
また、レーダ装置5は、自船に接近する物標を検出した場合に、警報を作動させてオペレータに危険を知らせる警報機能を有している。この機能を実現する構成の一部として、画像処理装置10は、警報範囲判定部36と、警報範囲設定部37と、ブザー(報知部)23と、を備えている。
【0043】
なお、以下の説明において、相対的に見たときにほぼ自船に真っ直ぐ向かって移動している物標を「接近物標」と呼ぶことがある。接近物標が存在する場合、当該接近物標及び自船のうち少なくとも何れかが移動の向き又は速度を変えないと、当該物標は将来的に自船と衝突する可能性が高いということができる。
【0044】
レーダアンテナ1は、パルス状の電波である探知信号を送信(放射)できるとともに、この送信した電波の反射波であるエコー信号を受信可能に構成されている。このレーダアンテナ1は、所定の周期で水平面内を回転しており、この回転周期より小さい周期で前記探知信号が方位を異ならせながら繰り返し送信されている。
【0045】
受信部11は、レーダアンテナ1が受信した反射波を検波し、増幅してA/D変換部12に出力する。A/D変換部12は、受信部11から送られてきたアナログ信号を適宜のデジタル信号に変換する。
【0046】
スイープメモリ13は、A/D変換部12によってデジタル信号に変換された1スイープ分の受信データを記憶可能に構成されている。なお、ここでいう「スイープ」とは、探知信号を送信してから次の探知信号を送信するまでの一連の動作をいい、「1スイープ分の受信データ」とは、探知信号を送信した後、次の探知信号を送信するまでの期間に受信したデータをいう。
【0047】
電波は直進する性質を持っているので、1スイープ分の受信データは、自船を起点にしてレーダアンテナ1の向きに引いた1本の直線上における状況を表す。また、レーダアンテナ1が当該直線の向きに探知信号を送信したときに、自船に近い物標によるエコー信号は早いタイミングで受信され、遠い物標によるエコー信号は遅いタイミングで受信される。従って、1スイープ分の受信データには、前記直線上に物標があるか否かの情報、及び、物標があった場合は当該物標が自船からどれだけ離れているかを表す情報が含まれている。前記スイープメモリ13には、1スイープ分の受信データを時系列順で記憶することができる。
【0048】
エコー強度計算部14は、スイープメモリ13から1スイープ分の受信データを時系列順に読み出して振幅を順次計算することで、当該受信データ中に等間隔で設定された複数のポイントでのエコー強度をそれぞれ算出する。これは、実質的には、レーダアンテナ1から探知信号を送信した時点から一定の時間間隔をあけて複数設定された時刻のそれぞれにおいて、反射波のエコー強度を検出することに相当する。
【0049】
エコー強度計算部14で取得されたエコー強度のデータ群(以下、このデータ群を「1スイープ分のエコー強度データ群」と呼ぶことがある。)は、表示用画像メモリ15へ時系列順に出力され、順次記憶される。なお、1スイープ分のエコー強度データ群を表示用画像メモリ15の画像データのうち何れの画素に記憶させるかは、描画アドレス発生部16によって決定される。また、本実施形態では、1スイープ分のエコー強度データ群は、航跡データ発生部41及び警報範囲判定部36のそれぞれに送信されており、後述する航跡データの生成及び接近物標の検出に用いられる。
【0050】
表示用画像メモリ15は、表示器19に画像を表示するための複数の画素データからなる画像データ(ラスタデータ)を記憶可能に構成されている。表示用画像メモリ15が保持する画像(以下、表示用画像と称する。)は、多数の画素が縦横に格子状(M画素×N画素のマトリクス状)に並べられることで表現されている。
【0051】
この表示用画像メモリ15に格納された表示用画像のデータは、適宜のタイミングで読み出されて表示器19に表示される。表示用画像メモリ15には、エコー強度の情報等を前記画素データとして画素ごとに記憶することができる。
【0052】
描画アドレス発生部(画素位置計算部)16は、エコー強度計算部14で得られた1スイープ分のエコー強度データ群を構成するエコー強度データのそれぞれについて、対応する表示用画像上の画素の位置(アドレス)を求めることができる。この描画アドレス発生部16には、探知信号を送信したときのレーダアンテナ1の角度θを表す信号が入力される。描画アドレス発生部16は、レーダアンテナ1の角度θ及びレーダレンジ等に基づき、エコー強度の各データに対応する画素の位置を以下の方法で計算する。
【0053】
即ち、レーダアンテナ1から探知信号を送信してから時間tが経過した時点でエコー信号が返ってきた場合、その時間tの間に、レーダアンテナ1と物標との間の距離rを電波が往復したことになる。従って、水平な平面内でレーダアンテナ1を原点とする極座標系を定義すると、レーダアンテナ1が探知信号を送信してから時間tが経過したときのエコー強度に対応する物標の位置は、当該探知信号の送信時の所定の方位基準(例えば北)からのアンテナ角度をθとして、上記の極座標系で(r,θ)=(c×t/2,θ)と表すことができる。ただし、cは光速である。また、図2に示すように、上記極座標系においてアンテナ角度θは、レーダアンテナ1が所定の方位(北方向)を向いているときに0°となり、レーダアンテナ1が通常回転する方向が正となるように定められる。なお、描画アドレス発生部16には、GPSセンサ及びジャイロコンパス(何れも図面において省略)から船首方位及び自船位置を示す情報が入力されている。また、所定の方位を船首方位とすることもできる。
【0054】
一方、表示用画像メモリ15で保持される表示用画像は、上記のとおり、格子状(マトリクス状)に配列された画素によって表現される。本実施形態では、表示用画像における各画素の位置を、画像の左上隅を原点とし、右方向にX軸をとり、下方向にY軸をとるXY直交座標系で取り扱うこととしている。
【0055】
そして、描画アドレス発生部16は、表示用画像メモリ15においてエコー強度の情報を記憶させるべき画素の位置を算出する。具体的には、この画素の位置(X,Y)は、上記XY直交座標系における自船(レーダアンテナ1)の位置を(Xs,Ys)とした場合、以下の式(1)に従って計算される。
【数1】
ただし、tは、レーダアンテナ1が探知信号を送信した時点からの経過時間である。kは、表示器19の表示領域のサイズ及びレーダレンジ等を考慮して定められる定数であり、θはアンテナ角度である。なお、(X,Y)は、前記表示用画像を構成する画素の位置(アドレス)を特定するものであるため、X及びYの計算結果において、小数点以下の端数は適宜丸められる。
【0056】
本実施形態では、1スイープ分のエコー強度データ群を構成する各データが、エコー強度計算部14から表示用画像メモリ15へ時系列順に出力される。そして、描画アドレス発生部16は、それぞれのエコー強度データに対応する画素の位置(X,Y)を式(1)に従って順次求めて表示用画像メモリ15へ出力する。従って、1スイープ分のエコー強度データ群を処理する場合、描画アドレス発生部16としては、上記の式においてθを一定とし、tをゼロから増大させながら(X,Y)を繰り返し計算していくことになる。
【0057】
上記の計算により、1スイープ分のエコー強度データ群に対応する表示用画像上の画素をXY直交座標系で表した位置(X,Y)は、自船の位置(Xs,Ys)を基準とした角度θの直線上となる。なお、以下の説明では、この直線のことを、探知信号の1回の送受信で得られる距離方向に連続する受信データにより形成される直線を示すものとして「スイープライン」と称することがある。
【0058】
従って、前記描画アドレス発生部16は、前記直線上の点(スイープライン上の点)に対応する、表示用画像における画素の位置(X,Y)を求める機能を有しているということができる。また、描画アドレス発生部16は、極座標で表現されるスイープライン上の点(r,θ)を、XY直交座標系での画素の位置(X,Y)に変換する、座標変換部としての機能を有しているということができる。
【0059】
描画アドレス発生部16による計算結果として得られる画素の位置(X,Y)は、tがゼロから増大するに伴って自船の位置(Xs,Ys)から離れていくように順次移動し、その移動軌跡が1本の直線(前記スイープライン)を描くことになる。1スイープ分のエコー強度データ群は、前記表示用画像において1本の前記スイープラインを描くように、計算された位置の画素に画素データとして記憶される。また、探知信号を1回送信する毎にレーダアンテナ1の角度θが変更されるため、これに伴ってスイープラインの角度は変化する。
【0060】
また、本実施形態の描画アドレス発生部16は、相対航跡用画像メモリ32及び真航跡用画像メモリ42に航跡データを書き込むための相対航跡用アドレス及び真航跡用アドレスを生成する。この相対航跡用アドレス及び真航跡用アドレスの詳細については後述する。
【0061】
なお、以後の説明では、表示用画像メモリ15、相対航跡用画像メモリ32及び真航跡用画像メモリ42にエコー強度に基づく画素情報を記憶させることを、当該画素に「描画する」と表現する場合がある。
【0062】
表示用アドレス発生部20は、表示用画像メモリ15から画像データを読み出して表示器19に表示させる際に参照される表示用アドレスを生成する。画像データの読出しは、表示器19が要求するタイミングで行う。また、表示用アドレス発生部20は、相対航跡用画像メモリ32及び真航跡用画像メモリ42に記憶される航跡データを読み出して表示器19に表示させる際に参照される表示用アドレスを生成することもできる。これにより、前記表示航跡設定部22の設定に応じ、真航跡又は相対航跡を表示器19に適切に表示することができる。
【0063】
カラーパレット21は、表示用画像メモリ15から入力される表示用画像の画素データを色情報又は輝度情報に変換するための情報を記憶する。また、このカラーパレット21には、相対航跡用画像メモリ32及び真航跡用画像メモリ42に記憶される航跡データを色情報又は輝度情報に変換するための情報が記憶されている。
【0064】
表示器19は、CRT又はLCD等によって構成されるラスタスキャン式の表示装置である。表示用画像メモリ15から読み出された表示用画像の画像データが、この表示器19によって表示される。
【0065】
以上の構成のレーダ装置5において、エコー強度計算部14は、レーダアンテナ1から探知信号を送信したときのエコー信号に基づいて、1スイープ分のエコー強度データ群を得る。また、描画アドレス発生部16は、探知信号送信時のレーダアンテナ1の角度θに基づいて、1スイープ分のエコー強度データ群を表示用画像メモリ15に記憶させる複数の画素の位置を(XY直交座標系で)順次求める。
【0066】
そして、以上の結果に基づき、表示用画像メモリ15が保持する表示用画像において角度θのスイープラインがあたかも描画されるかのように、前記エコー強度データ群を構成する各データが、表示用画像メモリ15に画素データとして記憶される。以上の処理をレーダアンテナ1の角度θを少しずつ変更しながら繰り返すことで、表示用画像メモリ15の画像データに、自船の位置を基準とするスイープラインを1本ずつ描くことができる。
【0067】
こうして得られた画像データは、表示用画像メモリ15から適宜のタイミングで読み出され、他の画像との合成処理等が適宜行われた上で表示器19に表示される。この結果、多数のスイープラインが放射状に描かれた画像が表示器19に表示され、ユーザは当該画像を見ることで、自船とその周囲の物標との位置関係を知ることができる。レーダアンテナ1の回転に伴って表示用画像メモリ15の画像には新しいスイープラインが繰り返し描画され、この結果、表示器19に表示される画像も随時更新されていく。
【0068】
航跡データ発生部41は、エコー強度計算部14から入力される1画素分のエコー強度のデータ(以下、このデータのことを「エコーデータY」と呼ぶことがある。)に基づいて、当該画素に対応する航跡データを生成する。航跡データには、表示器19の画面上に表示される画素の濃淡を決定する情報が設定されている。なお、本実施形態では、画素情報は8ビット(256段階)で表されている。
【0069】
例えば、その画素を物標が通過して間もない場合には、画面上の航跡が濃く表示されるように前記画素情報が設定される。逆に、その画素を物標が通過して長い時間が経過している場合には、画面上の航跡が淡く表示されるように前記画素情報が設定される。このようにして航跡データ発生部41で生成された航跡データは、相対航跡データWとして相対航跡用画像メモリ32に送信されるとともに、真航跡データZとして真航跡用画像メモリ42にも送信されている。
【0070】
相対航跡用画像メモリ32は、レーダアンテナ1が1回転する間に得られる複数の相対航跡データW(相対航跡データ群)を記憶可能なメモリであり、SDRAM等によって構成されている。航跡データ発生部41が生成した航跡データは、描画アドレス発生部16によって生成された相対航跡用アドレスに従って、相対航跡用画像メモリ32に書き込まれる。描画アドレス発生部16は、相対航跡用画像メモリ32上での自船の位置が固定されるように、航跡データのアドレスを決定する。従って、自船が移動しているかどうかに関わらず(自船の移動量を考慮せずに)、自船を基準とした物標の位置に相当するアドレスに航跡データが書き込まれることになる。結果として、前記航跡データは、自船の移動量と他船の移動量とが合成された(自船に対する他船の相対的な位置変化を示した)相対航跡データWとして相対航跡用画像メモリ32に記憶される。この相対航跡用画像メモリ32に記憶された複数の相対航跡データW(相対航跡データ群)に基づいて、相対航跡が画面上に表示される。
【0071】
真航跡用画像メモリ42は、レーダアンテナ1が1回転する間に得られる複数の真航跡データZ(真航跡データ群)を記憶可能なメモリであり、SDRAM等によって構成されている。航跡データ発生部41が生成した航跡データは、描画アドレス発生部16によって生成された真航跡用アドレスに従って、真航跡用画像メモリ42に書き込まれる。描画アドレス発生部16は、自船の移動量を考慮して航跡データの真航跡用アドレスを決定する。より具体的には、真航跡用アドレスは、相対航跡用アドレスに自船の移動量を適宜の方法で加算することによって得られる。この真航跡用アドレスによって、前記航跡データは、他船の絶対的な位置の変化を示す真航跡データZとして真航跡用画像メモリ42に記憶される。この真航跡用画像メモリ42に記憶された複数の真航跡データZ(真航跡データ群)に基づいて、真航跡が画面上に表示される。真トレイルモードでは、自船の移動量が考慮されるので、相対トレイルモードのように陸地等のような固定物標の軌跡が表示されることはない。
【0072】
なお、相対航跡用画像メモリ32には、前述の相対航跡データ群のほか、後述する各種のマーク(第1マークG及び第2マークJ)の有無についても画素ごとに記憶できるように構成されている。
【0073】
次に、図3から図5までを参照して、航跡データを生成する処理について説明する。図3は、航跡データ発生部41の構成を示したブロック図である。図4は、エコーデータYから航跡データを生成する処理を示したフローチャートである。図5は、航跡データの分布例を示した模式図である。
【0074】
図3に示すように、航跡データ発生部41は、航跡データ検出部61と、画素情報設定部62と、減算タイミング発生部63と、を主要な構成として備えている。
【0075】
航跡データ検出部61は、エコー強度計算部14から入力されるエコーデータYに基づいて、処理を行う画素に物標が存在しているか否かを調べるためのものである。航跡データ検出部61には、閾値として設定値Aが設定されており、この設定値AとエコーデータYの値とを比較して物標の有無を判定する。より具体的には、航跡データ検出部61は、エコーデータYが設定値A以上の場合には、その画素に物標が存在することを示す判定信号B(B=1)を画素情報設定部62に送信する。エコーデータYの値が設定値A未満の場合には、航跡データ検出部61は、その画素に物標が存在しないことを示す判定信号B(B=0)を画素情報設定部62に送信する。
【0076】
画素情報設定部62は、真航跡データZ及び相対航跡データWの元になる航跡データを生成するためのものである。この画素情報設定部62によって、経過時間に応じた航跡データの値が設定される。航跡データの値は、一定時間ごとに減算されることで、経過時間に応じた値に設定される。
【0077】
減算タイミング発生部63は、前記航跡データの値を減算するタイミングを決定するためのものであり、タイミング信号Cを画素情報設定部62に送信している。この減算タイミング発生部63は、所定周期ごとにレーダアンテナ1が1周する間だけC=1のタイミング信号を送信し、それ以外の時間はC=0のタイミング信号を送信する。航跡データ発生部41は、タイミング信号の値が1であり、かつ、所定の条件を満たした場合に、航跡データの値を減算する。
【0078】
この構成で、画素ごとの処理により、新しい航跡データが順次生成される。具体的には、画素情報設定部62が航跡データ検出部61からB=1の判定信号を受信した場合には、当該画素には物標が存在することを示す所定値を航跡データとして設定する。ここで、本実施形態では、前記画素情報を8ビットの整数値データ(0〜255の256段階)として記憶させるものとし、物標の存在を示す前記所定値は255とされている。従って、物標が存在すると判定された画素には、航跡データとして255が書き込まれる。また、B=0の判定信号を受信した場合には、真航跡データZを求める場合、過去の真航跡データZ(n−1)を真航跡用画像メモリ42から参照して、新たな真航跡データZ(n)を真航跡用画像メモリ42に書き込む。相対航跡データWについても同様であり、B=0の判定信号を受信した場合には、相対航跡用画像メモリ32から取得した過去の相対航跡データW(n−1)に基づいて新たな相対航跡データW(n)を求め、当該相対航跡データW(n)を相対航跡用画像メモリ32に書き込む。
【0079】
次に、図4のフローチャートを参照して航跡データの生成について説明する。以下の説明においては、相対航跡データWの生成を例にして説明する。エコー強度計算部14から航跡データ発生部41にエコーデータYが入力されると、図4に示すフローが開始される。まず、航跡データ検出部61は、当該エコーデータYが設定値A以上であるか否かを調べ、その判定結果を画素情報設定部62に送信する(S101)。
【0080】
画素情報設定部62は、エコーデータYが設定値A以上であることを示す判定信号B(B=1)を受信した場合には、相対航跡データW(n)を最大値255に設定する(S102)。また、画素情報設定部62は、エコーデータYが設定値A未満であることを示す判定信号B(B=0)を受信した場合には、相対航跡用画像メモリ32に記憶されている過去の相対航跡データW(n−1)を参照し、その値が0であるか否を調べる(S103)。
【0081】
画素情報設定部62は、S103で参照した過去の相対航跡データW(n−1)が0である場合には、0の値を新たな相対航跡データW(n)として設定する(S104)。画素情報設定部62は、S103の処理で参照した過去の相対航跡データW(n−1)が0でない場合は、タイミング信号Cに基づいて、相対航跡データW(n−1)の値を減算するタイミングであるか否かを調べる(S105)。
【0082】
画素情報設定部62は、相対航跡データW(n−1)の値を減算するタイミングである場合(C=1)には、参照した過去の相対航跡データW(n−1)から1を減算したものを新しい相対航跡データW(n)に設定する(S106)。これにより、画素情報の値は1段階だけ変化する。例えば、参照した過去の相対航跡データW(n−1)の値が255である場合は、新しく設定される相対航跡データW(n)の値は254になる。一方で、減算するタイミングでない場合(C=0)には、画素情報設定部62は、参照した過去の相対航跡データW(n−1)の値を変更せず、そのまま相対航跡データW(n)に設定する(S107)。
【0083】
画素情報設定部62は、S102、S104、S106又はS107の何れかの処理により設定された相対航跡データW(n)を、前記相対航跡用アドレスに従って、相対航跡用画像メモリ32に記憶させる(S108)。航跡データ発生部41は、以上の処理を画素ごとに行って、レーダアンテナ1が1回転する間に得られる1画面分の相対航跡データW(相対航跡データ群)を相対航跡用画像メモリ32に記憶させる。
【0084】
なお、真航跡データZについても、図4のフローと同様の処理で得ることができる。真航跡データZを処理する場合、描画アドレス発生部16によって生成されるアドレスが真航跡用アドレスである点と、新たな真航跡データZ(n)を生成する際に参照する過去の真航跡データZ(n−1)が真航跡用画像メモリ42から読み出される点と、が異なり、それ以外の処理については同様である。この処理を画素ごとに繰り返すことで、レーダアンテナ1が1回転する間に得られる1画面分の真航跡データZ(真航跡データ群)を真航跡用画像メモリ42に記憶させることができる。
【0085】
図5は、真航跡用画像メモリ42に記憶される真航跡データZの分布例を示した模式図である。前述したように、現在物標が存在している画素には、画素情報の値が255に設定される。図5に示される254から251までの値は航跡を示すデータである。また、真航跡データZが0に設定されている画素は、所定時間内に物標が存在しなかったことを示している。図5では、現在物標を示す画素から右側の画素に進むに従って真航跡データZの画素情報の値が1ずつ減少している。このことから、減算タイミングの1周期ごとに、物標が1画素ずつ画面上を左側に進行していることがわかる。
【0086】
次に、図6から図8までを参照して、相対航跡判定処理部33による接近物標の検出処理について説明する。図6は、相対航跡判定処理部33の構成を示したブロック図である。図7及び図8は、相対航跡判定処理部33による接近物標の判定処理を示したフローチャートである。
【0087】
相対航跡判定処理部33は、航跡データ発生部41から入力される相対航跡データWに基づいて、自船に接近しつつある物標を検出するためのものである。図6に示すように、相対航跡判定処理部33は、第1中間データ発生部51と、第1マーク判定部(中間データ判定部)52と、シフト部53と、を主要な構成として備えている。
【0088】
ところで、スイープライン上の画素は、スイープ始点側(中心)から外側に向かって順次描画される。スイープライン上の画素が新しく描画されるごとに、当該画素に対応する相対航跡データW(n)が、航跡データ発生部41から第1中間データ発生部51に入力される。第1中間データ発生部51は、スイープライン上に存在する画素の相対航跡データW(n)に基づいて、物標の接近を判定するための中間データFを生成する。この第1中間データ発生部51によって生成された中間データFは、第1マーク判定部52とシフト部53に出力される。なお、中間データFの生成方法の詳細については後述する。
【0089】
第1マーク判定部52は、中間データFに基づいて、相対航跡データWに記憶されている航跡に係る物標が前述の接近物標(即ち、相対的に見たときにほぼ自船に真っ直ぐ向かって移動している物標)であるか否かを判定する。言い換えれば、第1マーク判定部52は、入力された相対航跡データWに係る画素が、前記接近物標に係る相対航跡に含まれているかどうかを判定する。そして、第1マーク判定部52は、第1マークGを付けるか否かを上記の判定結果に応じて決定し、相対航跡用画像メモリ32に書き込む。
【0090】
この第1マーク判定部52には所定の設定値Tが設定されており、この設定値Tと中間データFの値とを比較することで上記の判定を行う。より具体的には、第1マーク判定部52は、中間データFの値が設定値Tになった場合には、第1マークGが付けられた旨を示すフラグ値(G=1)を、相対航跡用画像メモリ32の対応するアドレスに書き込む。一方、設定値T以外である場合は、第1マークGが付けられなかった旨を示すフラグ値(G=0)を、相対航跡用画像メモリ32の対応するアドレスに書き込む。この設定値Tは、レーダ装置5(画像処理装置10)が有する図略の操作手段を介して、オペレータが変更できるように構成されている。
【0091】
シフト部53は、シフトレジスタ等の遅延回路によって構成されるものであり、第1中間データ発生部51より入力された中間データFを遅延させて、参照データF’として第1中間データ発生部51に出力する。
【0092】
以上の構成で、第1中間データ発生部51は、随時入力されてくる相対航跡データW(n)と、過去の中間データFである参照データF’と、に基づいて新しい中間データFを生成する。
【0093】
次に、図7及び図8のフローチャートを参照しながら接近物標の検出処理について説明する。新しいスイープラインの描画が開始されたことを第1中間データ発生部51が検出すると、図7のフローが開始される。まず、第1中間データ発生部51は、参照データF’の値を0に設定する初期化処理を行う(図7のS201)。次に、描画される画素に対応する相対航跡データWを航跡データ発生部41から取得する(S202)。第1中間データ発生部51は、取得した画素の相対航跡データWの値が、255(物標の存在を示す値)であるか否かを調べる(S203)。相対航跡データWの値が255である場合は、中間データFの値を1に設定する(S204)。
【0094】
また、S203の判断で相対航跡データWの値が255でない場合は、第1中間データ発生部51は、相対航跡データWの値が、255からF’の値を減算した値と等しいか否かを調べる(S205)。そして、相対航跡データWの値が255からF’の値を減算したものと等しい場合は、参照データF’に1を加算したものを中間データFの値に設定する(S206)。例えば、取得した相対航跡データWが254であり、参照データF’が1の場合は、255から参照データF’の値を減算すると255−1=254となり、これは相対航跡データWの値に一致する。この場合、中間データFの値は、参照データF’の値に1を加算した値(1+1=2)に設定される。
【0095】
S203の判断で相対航跡データWの値が255でないと判定された場合であって、かつS205の条件を満たさない場合(W≠255−F’)は、S207の処理が行われる。S207では、第1中間データ発生部51は、相対航跡データWの値が、256からF’の値を減算したものと等しいか否かを調べる。相対航跡データWの値が256からF’の値を減算したものと等しい場合は、中間データFの値として参照データF’の値をそのまま設定する(S208)。また、S207の判断で、相対航跡データWの値が256からF’の値を減算したものと等しくなかった場合(W≠256−F’)には、中間データFの値を0に設定する(S209)。
【0096】
相対航跡判定処理部33は、S204、S206、S208又はS209の処理によって設定された中間データFの値を、スイープライン上の次の画素について中間データFを生成する際に用いる参照データF’の値として設定する(S210)。次に、第1マーク判定部52は、中間データFの値と設定値Tとが等しいか否かを調べる(図8のS211)。中間データFの値が設定値Tと等しい場合には、第1マーク判定部52は、第1マークGを当該画素に付けるべきと判断し、Gの値を1に設定する(S212)。中間データFの値が設定値Tと異なる場合は、Gの値を0に設定する(S213)。
【0097】
第1マーク判定部52は、S212又はS213の処理によって設定されたGの値を、相対航跡用画像メモリの対応するアドレスに書き込む(S214)。そして、S202からS214までの処理をスイープラインの描画が終了するまで繰り返す(S215)。原点から最も遠い位置にある終点の画素の描画が終了したところで、図7及び図8に示したフローをいったん終了する。新しいスイープラインが描画されると、上記フローが再び開始される。そして、スイープラインが描画される度にこの処理を繰り返す。
【0098】
次に、図9を参照して、設定値Tと接近物標との関係について説明する。図9は、スイープ角度θが90度の場合における相対航跡データWの分布例と中間データFの値の推移を示した模式図である。図9では、相対航跡データWの値が画素ごとに示されており、そのときの中間データFの値についても括弧付き数字で示している。また、この例では、第1マーク判定部52に設定されるTの値は6とされている。
【0099】
図9(a)では、1画素分の大きさの物標が自船に向かってきている場合の相対航跡データWの分布と中間データFの推移が示されている。なお、図9(a)では、スイープライン上の画素の一部を取り出して示している。図9(a)に示すように、相対航跡データWの値は、左から右に向かって、0、255、254、253、252、251、250、249の順で並んでいる。
【0100】
相対航跡データWの値は、相対航跡判定処理部33に対し、スイープラインの描画方向に従った順番で入力される。相対航跡データWの値として255が入力された時点で中間データFの値は1となり(図7のS204の処理)、次に254が入力された時点で中間データFの値は2となり(図7のS206の処理)、・・・というように、中間データFは、入力される相対航跡データWの値が255から1ずつ減少するごとに、1ずつ増加する。図9(a)には、中間データFの値の推移を相対航跡データWに対応させて示している。中間データFは、相対航跡データWの値が1つ入力されるごとに、0、1、2、3、4、5、6、7のように変化する。そして、中間データFの値が6になったときの画素に第1マークG(G=1)が設定される。この第1マークGは、その画素が、接近物標の相対航跡の中途部に位置している(言い換えれば、当該画素が、接近物標の相対航跡に含まれている)ことを意味する。
【0101】
図9(b)では、2画素分の大きさの物標が自船に向かってきている場合の相対航跡データWの分布と中間データFの推移が示されている。相対航跡データWの値は、左から右に向かって、255、255、254、253、253、252、251、250の順で並んでいる。
【0102】
この例では、相対航跡データWの値として255が入力された時点で中間データFの値は1となり(図7のS204の処理)、次に255が入力された時点で中間データFの値は1となり(図7のS204の処理)、次に254が入力された時点で中間データFの値は2となり(図7のS206の処理)、次に、253が入力された時点では、中間データFの値は3となる(図7のS206の処理)。図9(b)においては、1つ前の相対航跡データWの値と同じ253が、その次の相対航跡データWの値として入力されており、この場合、中間データFの値は1つ前に設定された値と同じ値である3になる(図7のS208の処理)。次に252が入力された時点で中間データFの値は4になり(図7のS206の処理)、・・・というように、中間データFの値は変化する。従って、図9(b)に示すように、中間データFは、相対航跡データWの値が1つ入力されるごとに、1、1、2、3、3、4、5、6のように変化する。そして、中間データFの値が6になったときの画素に第1マークG(G=1)が設定される。
【0103】
図9(c)では、1画素分の大きさの物標が自船に向かってきている場合の相対航跡データWの分布と中間データFの推移が示されている。相対航跡データWの値は、左から右に向かって、0、255、254、253、252、0、0の順で並んでいる。
【0104】
この相対航跡データWの例では、中間データFは、0、1、2、3、4、0、0、0の順に変化する。このように、自船に他船が向かっているような場合であっても、相対航跡データWの値が一定以上連続しないような場合は、中間データFの値が6に到達しないので、G=1が設定される画素がない。従って、図9(c)の状態では、接近物標が検出されないことになる。
【0105】
図9(d)では、1画素分の大きさの物標が自船から離れていく場合の相対航跡データW及び中間データFの分布例が示されている。相対航跡データWの値は、左側から右側に、249、250、250、251、252、253、254、255の順で並んでいる。
【0106】
この相対航跡データWの例では、中間データFは、0、0、0、0、0、0、0、1の順に変化する。このように、自船から離れる向きに移動する物標の航跡に対しては、中間データFの値が0に設定される。従って、何れの画素にも、接近物標であることを示すG=1が設定されない。このように、スイープライン上で相対航跡データWの値が連続する場合であっても、物標が自船から離れる方向に移動している場合では、接近物標が検出されることはない。
【0107】
以上のように、本実施形態の相対航跡判定処理部33では、物標が現在存在していることを示す画素(255)を検出した位置から、スイープライン上を自船から離れる方向で、相対航跡データWの値が連続性を保ちながら所定値まで減少しているか否かを調べる。そして、そのような関係が検出された場合に、相対航跡データWの値が当該所定値に達した画素に、当該画素が接近物標の相対航跡に含まれていることを示すG=1が設定される。
【0108】
なお、前記設定値Tを小さく設定する(T≦4)ことで、図9(c)に示される物標を接近物標として検出することも可能である。このように、設定値Tは接近物標を検出する基準を意味しており、この設定値Tを変更することで、接近物標を検出する感度を調整することができる。例えば、図9(a)及び図9(b)の場合では、設定値TをT≧8の範囲で設定した場合、中間データFの値が8に到達する前に相対航跡データWの値が0になるので、接近物標の相対航跡が検出されないことになる。
【0109】
次に、接近物標探知処理部34による接近物標の現在位置の検出について説明する。即ち、ある画素に前記第1マークGが付けられたといっても、それは接近物標が過去の時点で当該画素に存在したことを意味するにとどまり、その接近物標が現在どこにあるかは不明である。そこで、当該接近物標の現在位置を接近物標探知処理部34により求めるのである。なお、以下に説明する処理は、スイープラインを描画する処理とは独立した処理として行う。
【0110】
接近物標探知処理部34は、相対航跡用画像メモリ32に記憶される相対航跡データW群から第1マークG(G=1)が設定されている画素を探索し、当該画素をトリガ画素として相対航跡データWを所定方向に辿っていくことで、接近物標の現在の位置を検出するものである。相対航跡用画像メモリ32に記憶される相対航跡データW群及び第1マークGの値は、スキャン用アドレス発生部35が生成するアドレス(画素位置)の変化に応じた順番で、それぞれの画素について調べられる。
【0111】
まず、図10及び図11を参照して、検出する画素位置の決定について説明する。図10は、スキャン用アドレス発生部35によって決定されたアドレスに従って、検出処理を行う様子を示した模式図である。図11は、スキャン用アドレス発生部35によるアドレスを生成する処理を示したフローチャートである。
【0112】
スキャン用アドレス発生部35は、相対航跡用画像メモリ32に記憶される全ての画素を指定するように、アドレスを順次決定する。まず、スキャン用アドレス発生部35において、検出処理を開始する開始画素のアドレス(開始アドレス)が設定されるとともに、検出処理を終了する終了画素のアドレス(終了アドレス)が設定される。前記開始画素は、相対航跡用画像メモリ32の相対航跡データ群の4隅に配置される画素のうちの1つに設定される。前記終了画素は、前記4隅に配置される画素のうち、前記開始画素が設定される画素に対してはす向かいの位置にある画素に設定される。なお、本実施形態では図10に示すように開始画素から終了画素に向かって処理が順次行われるので、この処理の流れに着目して、以下の説明においては開始画素側を上流側、終了画素側を下流側とそれぞれ称することがある。
【0113】
図10では、M×N個の画素がXY直交座標系で配列された相対航跡用画像メモリ32において、開始画素を左上隅の画素に設定し、終了画素を右下隅の画素に設定した例が示されている。図10に示す例では、開始画素の開始アドレスは(Xf,Yf)であり、終了画素の終了アドレスは(Xf+M−1,Yf+N−1)である。この構成で、変数m(M>m≧0)及びn(N>n≧0)を用いた場合、検出処理中の画素のアドレスは(Xf+m,Yf+n)と表現することができる。開始画素は1段目のラインに属しており、終了画素はN段目のラインに属している。ここでいうラインとは、横方向(X軸方向に平行な方向)のラインである。
【0114】
図11を参照しながら具体的な検出処理について説明する。処理が開始されると、アドレスを決定する変数m及び変数nに0が設定される(S301)。次に、スキャン用アドレス発生部35は、検出処理を行う画素のアドレス(X,Y)を、X=Xf+m、Y=Yf+nに従って決定する(S302)。例えば、1回目の処理では、m=0、n=0に設定されているので、最初に設定されるアドレスは(Xf,Yf)となり、これは開始画素のアドレスと一致する。次に、S302の処理で設定されたアドレスの画素について検出処理を行う(S303)。
【0115】
次に、m=M−1であるか否かを調べ(S304)、m≠M−1である場合は、mの値に1を加算して(S305)、S302の処理に戻る。m=M−1である場合は、S303で検出処理した画素が右端の画素であった場合なので、mの値に0を設定する(S306)。続いて、検出処理を行った画素が終了アドレスであったか否かを判定するため、n=N−1であるか否かを調べる(S307)。n≠N−1ならば、終了画素ではないので、nの値に1を加算して(S308)、S302の処理に戻る。S307の判断で、終了アドレスに到達したと判定された場合(n=N−1)、この処理を終了する。
【0116】
以上のフローにより、S303の検出処理が、開始画素から終了画素に到達するまで1画素ずつ順次繰り返される。この結果、相対航跡用画像メモリ32に記憶される全ての画素の相対航跡データWが処理されることになる。
【0117】
次に、図12から図15までを参照して、接近物標探知処理部34による検出処理の具体的な内容について説明する。図12は、接近物標探知処理部34の構成を示したブロック図である。図13は、比較画素a,b,cと検出処理中の画素との位置関係を示した模式図である。図14及び図15は、接近物標探知処理部34による物標の位置を検出する処理を示したフローチャートである。
【0118】
図12に示すように、接近物標探知処理部34は、第2中間データ発生部81と、第2マーク判定部82と、ラインメモリ83と、2つのシフト部84,85と、を主要な構成として備えている。
【0119】
第2中間データ発生部81は、第2マーク判定部82が物標の存在を検出する判定を行うための第2中間データHを生成するものである。第2中間データ発生部81には、相対航跡データW、及び第1マークの有無に関するデータGが相対航跡用画像メモリ32から入力されている。また、第2中間データ発生部81には、検出処理を行っている画素のアドレスを特定するための変数m及びn(図10を参照)が入力されている。なお、現在検出処理を行っている画素(m及びnの値により特定される画素)を、以下の説明で検出画素と称することがある。
【0120】
第2中間データ発生部81には、検出画素の近傍に位置する比較画素a,b,cの第2中間データHの値がそれぞれ入力されている。図13を用いて検出画素と比較画素a,b,cとの位置関係について説明する。なお、図13は、開始画素を左上隅の画素に設定し、終了画素を右下隅の画素に設定したときの検出画素と比較画素との位置関係を示すものである。図13に示すように、比較画素cは、検出画素の直前に検出処理が行われた画素であり、検出画素の左側(X軸方向の上流側)に隣接している。比較画素a,bは、検出画素が属するラインの上側(Y軸方向の上流側)に隣接するラインに属する画素である。このうち比較画素bは、検出画素の上側(Y軸方向の上流側)に隣接し、比較画素aは、比較画素bの左側(X軸方向の上流側)に隣接するとともに比較画素cの上側(Y軸方向の上流側)に隣接している。
【0121】
比較画素の位置は、開始画素の位置に応じて、検出画素との関係で相対的に定められる。例えば、開始画素が右下隅の画素に設定される場合は、検出画素の右側に比較画素cが位置し、検出画素の下側に比較画素bが位置する。そして、比較画素aは、比較画素bの右側に位置するとともに比較画素cの下側に位置する。このように、比較画素aは、検出画素及び比較画素a,b,cの中では開始画素に最も近い画素になる。一方、検出画素は、検出画素及び比較画素a,b,cの中では終了画素に最も近い画素になる。
【0122】
第2中間データ発生部81は、これらのデータに基づいて第2中間データHを生成し、この第2中間データHを第2マーク判定部82に送信する。また、生成された第2中間データHは、参照データ(比較画素a,b,cの値)として新たな第2中間データHを生成する際に用いるため、ラインメモリ83及びシフト部84に送信されている。
【0123】
第2中間データ発生部81は、検出画素に第1マークGが付けられていること(G=1)を検出した場合は、検出画素の相対航跡データWを第2中間データHの値として設定する。例えば、相対航跡データWの値が250である画素にG=1が設定されていた場合、第2中間データHの値に250を設定する。
【0124】
また、第2中間データ発生部81は、検出画素の相対航跡データWの値と前記比較画素の値とを比較し、所定の判定条件を満たす場合にも、当該検出画素の相対航跡データWの値を第2中間データHの値として設定する。より具体的には、相対航跡データWの値(以下の説明において、単にWと表現する場合がある。)が、比較画素aの値又は比較画素bの値又は比較画素cの値のうち少なくとも何れか1つと等しい値である又は比較画素の値より1だけ大きい値である場合に、第2中間データ発生部81は判定条件を満たすと判断する。なお、対象の比較画素の値が0でないことが条件である。
【0125】
言い換えれば、第2中間データ発生部81は、以下の3つの条件を判定している。即ち、(1)比較画素aの値について、a≠0であって、相対航跡データW=a又はW=a+1の関係が成立するか否か、(2)比較画素bについて、b≠0であって、W=b又はW=b+1の関係が成立するか否か、及び、(3)比較画素cについて、c≠0であって、W=c又はW=c+1の関係が成立するか否かである。そして、(1)〜(3)の関係が何れか1つでも成立すれば、判定条件を満たしたことになるのである。例えば、検出画素の相対航跡データWがW=251、比較画素の値がそれぞれa=0、b=0、c=250の場合は、上記の(3)の関係が成立するので判定条件は満たされ、第2中間データHの値は251に設定されることになる。
【0126】
第2マーク判定部82は、予め設定された所定値Sと第2中間データHの値を比較することで、検出画素が、前記接近物標が現在存在している画素であるか否かを判定するように構成されている。なお、以下の説明では、接近物標が現在存在している画素を「接近物標存在画素」と称することがある。そして、第2マーク判定部82は、第2マークJを付けるか否かを上記の判定結果に応じて決定し、相対航跡用画像メモリ32に書き込む。なお、この第2マーク判定部82には、第2中間データHとともに、相対航跡用画像メモリ32から相対航跡データW及び過去の第2マークJ’が入力されている。
【0127】
具体的に説明すると、第2マーク判定部82は、検出画素が前記接近物標存在画素であると判定した場合は、第2マークJが付けられた旨を示すフラグ値(J=1)を、相対航跡用画像メモリ32の対応するアドレスに書き込む。一方で、検出画素が前記接近物標存在画素でない場合には、第2マーク判定部82は、第2マークが付けられなかった旨を示すフラグ値(J=0)を、相対航跡用画像メモリ32の対応するアドレスに書き込む。なお、前記所定値Sには、物標がその画素に存在することを示す相対航跡データWの値と同じ値が設定される。本実施形態では、相対航跡データWの最大値であり、物標が存在していることを示す255が所定値Sとして設定されている。
【0128】
ラインメモリ83は、第2中間データ発生部81から入力されてくる第2中間データHを1ライン分だけ記憶可能に構成されている。第2中間データ発生部81は、ラインメモリ83から比較画素a及びbの値を読み出すことができる。2つのシフト部84,85は、何れもシフトレジスタ等によって構成される遅延回路である。シフト部84は、入力されてくる第2中間データHを遅延させて比較画素cの値として第2中間データ発生部81に出力する。シフト部85は、ラインメモリ83から入力されるデータを遅延させて比較画素aの値として第2中間データ発生部81に出力する。
【0129】
第2中間データ発生部81は、所定方向で相対航跡データWの連続性を調べ、前記判定条件を満たすときには、相対航跡データWに対応する第2中間データHを検出画素に設定している。従って、第2中間データHは、相対航跡データWが所定方向で連続性を有していることを示すデータであるといえる。また、この第2中間データHには相対航跡データWの値と同じ値が設定されるので、第2中間データHが前記所定値Sと等しくなった場合、第1マークGが付けられた画素から、当該第1マークGに関する相対航跡の物標が現在存在する画素まで、所定の方向で相対航跡データWが連続していることを示すことになる。
【0130】
なお、ここでいう「所定の方向で」とは、当該方向が所定の角度範囲に含まれることを意味している。例えば、開始画素が左上隅の画素に設定されている場合(図13の場合)では、自船から見て前記接近物標が相対的に真右に移動している場合、真下に移動している場合、及び右下(終了画素側)に移動している場合に検出されることになる。
【0131】
前述したように、比較画素と検出画素との位置関係は、開始画素の位置によって決まる。従って、接近物標存在画素を検出できるときの当該接近物標の移動の向きは、開始画素の位置に応じて、以下のようになる。即ち、開始画素を右上隅の画素に設定した場合は、接近物標が相対的に真左に移動する場合、真下に移動する場合、及び左下に移動する場合に、当該接近物標が現在存在する画素(接近物標存在画素)を検出できることになる。開始画素を右下隅の画素に設定した場合は、接近物標が相対的に真左に移動する場合、真上に移動する場合、及び左上に移動する場合に、接近物標存在画素を検出できることになる。開始画素を左下隅の画素に設定した場合は、接近物標が相対的に真右に移動する場合、真上に移動する場合、及び右上に移動する場合に、接近物標存在画素を検出できることになる。
【0132】
従って、開始画素を4隅のそれぞれに設定して検出処理を行うことで、自船に対して接近物標がどの方向に相対移動している場合でも、第1マークGが付けられた画素から当該接近物標が現在存在する画素を検出し、第2マークJを付けることができる。本実施形態では、あらゆる方向に移動する接近物標についてその現在位置を検出するために、開始画素の位置を変更して検知処理を4回繰り返す。即ち、比較画素と検出画素との位置関係を変えることで、物標の移動を検出する所定方向ごとに接近物標の現在位置の検出処理を行っていくのである。なお、このスキャン方向の切替えについては後述する。
【0133】
次に、図14及び図15のフローチャートを参照して、必要な画素に第2マークJを付けるための具体的な処理について説明する。なお、図14及び図15を参照した説明において、開始画素の位置(アドレス)は左上隅に設定され、終了画素の位置(アドレス)は右下隅に設定されているものとする。
【0134】
接近物標の現在位置を探知する処理が開始されると、図14のフローが開始される。まず、第2中間データ発生部81は、検出画素のY座標(Yf+n)を決定するnの値が0であるか否かを調べることで、1ライン目の処理であるか否かを調べる(S401)。n=0である場合、つまり、1ライン目の処理である場合は、比較画素a及びbの値を0に設定する(S402)。n=0でない場合(2ライン目以降の場合)は、処理する画素が左端であるか否かを調べるために、mの値が0であるか否かを調べる(S403)。m=0である場合、つまり、処理する画素が左端である場合は、予めラインメモリ83に記憶されている比較画素bの値を取得する(S404)とともに、比較画素aの値を0に設定する(S405)。m=0でない場合は、予めラインメモリ83に記憶されている比較画素a及びbの値を取得する(S406)。
【0135】
次に、第2中間データ発生部81は、mの値に応じて比較画素cの値を設定する。より具体的には、検出画素のX座標(Xf+m)を決定するmの値が0であるか否かを調べる(S407)。m=0の場合は、比較画素cの値を0に設定する(S408)。m=0でない場合、シフト部84で遅延された1画素前の第2中間データHの値を比較画素cの値として設定する(S409)。
【0136】
次に、第2中間データ発生部81が相対航跡用画像メモリ32から相対航跡データW及び第1マークGを取得するとともに、第2マーク判定部82が相対航跡用画像メモリ32から相対航跡データW及び過去の第2マークJ’を取得する(S410)。そして、第2中間データ発生部81は、取得したGの値を調べ(図15のS411)、G=1である場合(即ち、当該検出画素が含まれる航跡が前記接近物標の相対航跡である場合)は、当該画素の相対航跡データWの値を第2中間データHの値として設定する(S412)。
【0137】
S411の処理において、G=0の場合は、前述の処理で設定した比較画素a,b,cの値と、相対航跡データWの値と、を比較し、前記判定条件を満たしているか否かを調べる(S413)。判定条件を満たしている場合には、第2中間データHの値として、当該検出画素の相対航跡データWの値を設定する(S412)。S413の判断で、判定条件を満たしていない場合は、第2中間データHの値を0に設定する(S414)。
【0138】
第2中間データ発生部81は、第2中間データHを第2マーク判定部82に出力するとともに、ラインメモリ83にも出力して、当該ラインメモリに第2中間データHを記憶させる(S415)。第2マーク判定部82は、受信した第2中間データHの値が所定値Sと等しいか否かを調べる(S416)。本実施形態では、第2中間データHの値が255であるか否かを調べる。第2中間データHの値が所定値Sと等しい場合は、接近物標が存在していると判定し、Jの値を1に設定する(S417)。
【0139】
S416の判断で第2中間データHが所定値Sと等しくない場合には、第2マーク判定部82は、当該画素が、前回のスキャンで接近物標存在画素として検出された画素であるか否かを調べる(S418)。即ち、上述したように、本実施形態ではあらゆる方向から接近する接近物標の現在位置を検出するために、相対航跡用画像メモリ32に記憶された相対航跡データWを調べるときに、スキャン方向を変更しながら接近物標存在画素の検出を4回繰り返す。そして、接近物標存在画素を検出できる相対航跡に係る物標の移動方向はスキャン方向に応じて異なるため、それまでに接近物標(接近物標存在画素)として検出されて第2マークJが付けられ、Jの内容として1が設定されていたものが、スキャン方向を変更して当該画素が接近物標として検出されなくなったときに、Jの値に0が上書きされてしまう場合がある。このような事態を防止するため、S416の判断で第2中間データHが所定値Sと等しくないと判定された場合でも、相対航跡用画像メモリ32に記憶される第2マークJ’(過去のJの値)が1であり、かつ相対航跡データWが最大値である255(所定値S)であるかを調べ(S418)、その条件を満たす場合にはJの値を1に設定するのである(S417)。S418の判断で過去のJ’の値が1でない場合(過去のスキャン処理によってJ=1が設定されていなかった場合)には、接近物標が存在していないと判定し、Jの値を0に設定する(S419)。
【0140】
なお、S418で相対航跡データWの値が所定値S(255)と等しいか否かを判断するのは、その画素の位置には既に接近物標が存在しなくなっているのに、レーダアンテナ1の1回転前のデータに基づいてJの内容に1が設定されている場合があり、この場合はJの内容を0にすべきだからである。
【0141】
そして、第2マーク判定部82は、S417又はS419の処理で設定されたJの値を相対航跡用画像メモリ32に書き込む(S420)。
【0142】
以上に示したS401〜S420の処理を図10に示す全画素に対して繰り返し行うことで、第2マークJが画素ごとに設定されていく。即ち、接近物標が現在存在していると判定された画素にはJ=1が設定され、それ以外の画素にはJ=0が設定される。
【0143】
次に、図16を参照して、第2マークJを書き込む一連の流れについて説明する。図16(a)は、接近物標の相対航跡に第1マークGを書き込む様子を示した模式図である。図16(b)は、接近物標の現在画素に第2マークJを書き込む様子を示した模式図である。
【0144】
相対航跡判定処理部33は、図16(a)に示すように、スイープライン上の相対航跡データWを調べることで、自船に向かってくる接近物標を検出する(図7及び図8のフローチャートを参照)。次に、接近物標探知処理部34は、図16(b)に示すように、第1マークGを起点として接近物標の相対航跡データWを辿り、相対航跡データWが最大値の画素(即ち、前記の接近物標存在画素)に到達したところで、当該画素に第2マークJを付ける(図14及び図15のフローチャートを参照)。これによって、第1マークGに基づいて接近物標の存在する位置を特定し、第2マークJを付けることが可能になる。
【0145】
次に、図17及び図18を参照して、スキャン方向と、物標の検出位置の関係について説明する。図17及び図18には、自船に接近しつつある4つの物標A、物標B、物標C及び物標Dの航跡が記憶された相対航跡用画像メモリ32の内容が概念的に示されている。物標Aは画面左上から、物標Bは画面右上から、物標Cは画面左下から、物標Dは画面右下から、それぞれ自船に向かって真っ直ぐ接近している。物標A〜Dは何れも接近物標に該当し、相対航跡判定処理部33の処理により、それぞれの物標の航跡における所定画素に第1マークGが付されている。そして、この相対航跡用画像メモリ32の記憶内容(前記相対航跡データW)に対し、図17(a)、図17(b)、図18(c)、図18(d)の順でスキャンが行われる。
【0146】
図17(a)では、開始画素を左上隅の画素に設定し、終了画素を右下隅の画素に設定する。そして、X軸方向のスキャンを右側に向かって行う。このスキャンでは、左上から接近してくる物標Aの存在位置が検出される。図17(b)では、開始画素を左下隅の画素に設定し、終了画素を右上隅の画素に設定する。そして、X軸方向のスキャンを右側に向かって行う。このスキャンでは、左下から接近してくる物標Cの存在位置が検出される。
【0147】
図18(c)では、開始画素を右下隅の画素に設定し、終了画素を左上隅の画素に設定する。そして、X軸方向のスキャンを左側に向かって行う。このスキャンでは、右下から接近してくる物標Dの存在位置が検出される。図18(d)では、開始画素を右上隅の画素に設定し、終了画素を左下隅の画素に設定する。そして、X軸方向のスキャンを左側に向かって行う。この方向でのスキャンでは、右上から接近してくる物標Bの存在位置が検出される。
【0148】
このように、4通りのスキャン方向で検出処理を行うことで、あらゆる方向から接近してくる接近物標の現在の位置を特定し、第2マークJを付ける(J=1を書き込む)ことが可能になる。また、相対航跡用画像メモリ32は、X軸方向の連続アクセスを高速に行うことができるSDRAM等によって構成されているので、真航跡用画像メモリ42の各画素へのアクセスを高効率で行うことができ、移動物標の検出を高速に行うことができる。そして、第2マークJが設定された画像データは、相対航跡用画像メモリ32からカラーパレット21に送信され(図1において省略)、第2マークJ(J=1)が設定されている画素が他の物標と異なるように強調して表示器19に表示される。これにより、例えば、接近物標が存在する位置に対応する画素が赤く描かれ、それ以外の物標は青く描かれるような画面表示が可能になる。
【0149】
なお、上記のような4通りのスキャン方向で接近物標の現在位置の検出を行う代わりに、図9や図16(a)に示す第1マークGを設定する処理(スイープラインに沿った処理)において、物標の現在位置を示す画素に第2マークJを付けてしまうことも不可能ではない。しかしながら、例えば図9(a)の例で、相対航跡データWが0、255、254、253、252、251、250、249の順で入力されたときに、この相対航跡が接近物標の航跡であることが判明するのは、Wの値として250が入力された時になる。従って、その時点で、Wの値として255が入力された画素に戻って第2マークJを付けることとすると、スイープラインの始端から終端へ(図9(a)においては、左から右へ)という処理手順の原則を外れることとなって、処理が複雑になってしまう。この点、本実施形態では別途スキャン処理を行って第2マークJを付けているので、スイープラインに関する処理を著しく簡素化することができる。
【0150】
また、本実施形態において接近物標の現在位置の検出を行う処理(第2マークJを付ける処理)の際に4通りの方向でスキャンを繰り返すのも、それぞれのスキャンにおいて処理する画素の順序の原則(例えば、図10に示す画素の処理順序の原則)を外れないようにすることで、検出処理を簡素化するためである。
【0151】
次に、図19及び図20を参照して、本実施形態のレーダ装置5(画像処理装置10)が備える警報システムについて説明する。図19は、自船と警報範囲の位置関係を示した模式図である。図20は、警報範囲に接近物標が存在するか否を検出する処理を示したフローチャートである。
【0152】
前述したようにレーダ装置5に搭載される画像処理装置10は、警報システムとして、警報範囲判定部36と、ブザー23と、警報範囲設定部37と、を備えている。警報範囲判定部36は、接近物標が警報範囲内に存在するか否かを判定するためのものである。ブザー23は、予め設定された警報範囲内に接近物標が入ると作動する発音装置である。警報範囲設定部37は、オペレータの操作により、警報範囲の設定、変更及び警報機能のON/OFF等の操作を行うことができる。
【0153】
図1に示すように、警報範囲判定部36には、エコーデータY、第2マークJ、距離r及びレーダアンテナ1の角度θが入力されている。警報範囲判定部36は、これらの情報に基づいて、接近物標が警報範囲内に存在するか否かを判定する。図19に示すように、警報範囲判定部36には、警報範囲を設定するパラメータとして、R1、R2、θ1及びθ2が設定されている。R1及びR2は、接近物標を検出する距離の範囲を決定するためのものであり、θ1及びθ2は、接近物標を検出する角度の範囲を決定するためのパラメータである。
【0154】
図20を参照して、警報装置の具体的な処理について説明する。警報範囲判定部36は、新しいエコーデータYがエコー強度計算部14から入力されると、図20のフローを開始する。まず、警報範囲判定部36は、エコーデータYが設定値以上か否かを調べる(S501)。エコーデータYの値が設定値未満である場合は、このフローを終了する。
【0155】
S501の処理で、エコーデータYが設定値以上である場合は、警報範囲内の接近物標の存在を調べていく。まず、警報範囲判定部36は、エコーデータYを検出したときの距離rがR1<r<R2の条件を満たすかを調べる(S502)。入力される距離rが条件を満たす場合、警報範囲判定部36は、エコーデータYが入力されたときのレーダアンテナ1の角度θがθ1<θ<θ2の条件を満たすかを調べる(S503)。S502及びS503の条件が何れも満たされている場合は、警報範囲判定部36は、エコーデータYに対応する画素のJの値を調べる(S504)。Jの値が1であれば、接近物標が警報範囲内に存在していることになるので、ブザー23を作動させる(S505)。S502からS504までの条件を1つでも満たさない場合には、報知部を作動させることなくこのフローを終了する。
【0156】
以上のフローによって、自船から離れていく物標には反応せず、自船に対して相対的に接近する物標にのみ反応する警報システムが実現される。なお、図20に示したフローでは、接近物標を検出しなかった場合は特に処理を行わずにフローを終了しているが、この構成は適宜変更できる。例えば、警報範囲に接近物標が検出されていない旨を適宜の記憶手段に記憶させる処理を行うようにすることもできる。
【0157】
以上に示したように、本実施形態のレーダ装置5に搭載される画像処理装置10は以下のように構成される。即ち、画像処理装置10は、相対航跡用画像メモリ32と、相対航跡判定処理部33と、を備える。相対航跡用画像メモリ32は、方位を異ならせて送信した探知信号に対して取得されたエコー信号により探知された物標の自船(探知信号を送信した送信位置)に対する相対的な位置変化を示す相対航跡データW群を記憶可能に構成される。相対航跡判定処理部33は、相対航跡用画像メモリ32に記憶される相対航跡データW群のうち、同じスイープライン上に存在する相対航跡データWに基づいて、探知信号により探知された物標が自船に接近する接近物標であるか否かを判定する。
【0158】
これにより、速度や方向等を考慮した複雑な計算を行うことなく、同じスイープライン上の相対軌跡データを調べるという簡単な処理で、探知信号により探知された物標が接近する物標であるか否かの判定を行うことができる。従って、接近物標を検出するための構成をシンプルにすることができ、低コスト化を実現できる。
【0159】
また、本実施形態の画像処理装置10は、相対航跡判定処理部33によって接近物標と判定された物標が他の物標と区別して表示されるように画像処理を行う。
【0160】
これにより、接近物標が他の物標と区別して表示されるので、ユーザは接近物標を直感的かつ即座に把握することができる。
【0161】
また、本実施形態の画像処理装置10は、相対航跡データW群に基づいて、物標とともにその物標の相対航跡が表示されるように画像処理を行うことができる。
【0162】
これにより、他の物標と区別して表示される接近物標とともに、物標が相対的に接近しているか否かを認識することが容易な相対航跡が表示されるので、接近物標との衝突の可能性の有無を迅速に判断することができる。また、接近物標と相対的に位置が変化しない物標とが区別して表示されるので、相対航跡が物標とともに表示されることによって、両者が紛らわしくなって判別できなくなる事態も防止できる。
【0163】
また、本実施形態の画像処理装置10は、以下のように構成される。即ち、相対航跡データWは、相対航跡用画像メモリ32を構成する画素単位で生成される情報であって、前記物標が直近に検出されてからの経過時間に応じて段階的に変化する情報である。そして、相対航跡判定処理部33は、スイープライン上で物標(即ち、値が255である相対航跡データW)が検出された場合に、図9の例に示すように、その検出位置を起点として当該自船(探知信号の送信位置)から離れる方向で、相対航跡データWの値が当該スイープライン上で画素的な連続性を保ちつつどの値まで連続的に減少するかを示す中間データFを生成する。相対航跡判定処理部33は、中間データFの値が設定値Tである場合(所定の条件を満たしながら変化する場合)に、その画素が、接近物標に係る相対航跡に含まれていると判定する。
【0164】
これにより、接近物標として検出する必要のない物標の小さな動きを検出しないように所定の条件を設定することで、実際に衝突のおそれのある物標の検出精度を向上させることができる。
【0165】
また、本実施形態の画像処理装置10においては、上記の設定値Tは変更可能である。
【0166】
これにより、使用する状況に応じた接近物標の検出感度を設定することができ、画像処理装置10の柔軟な運用が可能になる。
【0167】
また、本実施形態の画像処理装置10は、接近物標に係る相対航跡に含まれていると相対航跡判定処理部33によって判定された画素(第1マークGが付けられた画素)から、当該相対航跡の接近物標が現在存在する画素(接近物標存在画素)を前記相対軌跡データ群に基づいて求める接近物標探知処理部34を備える。
【0168】
これにより、自船に衝突するおそれがある接近物標の現在の位置を、簡素な構成で確実に検出することができる。
【0169】
また、本実施形態の画像処理装置10は、予め設定される警報範囲の内部に接近物標が存在することを検出する警報範囲判定部36と、この警報範囲判定部36によって接近物標が検出されると作動するブザー23と、を備える。
【0170】
これにより、現実に衝突の危険がある物標の存在だけを正確にユーザに知らせることができる警報システムを簡素な構成で提供することができる。
【0171】
次に、図21から図28までを参照して、第2実施形態の画像処理装置210が搭載されたレーダ装置5について説明する。第2実施形態の画像処理装置210は、真航跡用画像メモリ42に記憶されている真航跡データZに基づいた真航跡を表示器19に表示する際に、接近物標と判定された物標の真航跡を他の物標の真航跡と区別して表示できるように構成されている。なお、以下の説明において、前述の第1実施形態と同一及び類似する構成には、図面に同じ符号を付してその説明を省略する場合がある。
【0172】
図21は、第2実施形態の画像処理装置210が搭載されたレーダ装置5の構成を概略的に示したブロック図である。図21に示す画像処理装置210は、第1実施形態と同様に接近物標を検出できるように構成されている。なお、第1マークG及び第2マークJを相対航跡用画像メモリ32に記憶させる処理については、第1実施形態の画像処理装置10と同様の構成なので、その説明を省略する。
【0173】
図21に示すように、第2実施形態の画像処理装置210は、第1実施形態の構成に加えて、真航跡探知処理部234を備えている。
【0174】
また、本実施形態においては、真航跡用画像メモリ42には、前述の真航跡データ群のほか、後述するマーク(第3マークM)の有無についても画素ごとに記憶できるように構成されている。
【0175】
なお、スキャン用アドレス発生部35は、相対航跡用画像メモリ32に入力される相対航跡用アドレスを生成すると同時に、真航跡用画像メモリ42に入力される真航跡用アドレスを生成するようになっている。また、真航跡用画像メモリ42においては、相対航跡用画像メモリ32(図10を参照)と全く同様に複数の画素がXY直交座標系で配列されており、その画素の配列サイズ(縦M個、横N個)については相対航跡用画像メモリ32と同一となっている。そして本実施形態では、接近物標探知処理部34による相対航跡用画像メモリ32のスキャンと、真航跡探知処理部234による真航跡用画像メモリ42のスキャン(詳細は後述)とが、同期して行われるようになっている。この同期して行われるスキャンにおいて、接近物標探知処理部34がアクセスする相対航跡用画像メモリ32の画素と、真航跡探知処理部234がアクセスする真航跡用画像メモリ42の画素と、は自船位置に対する距離及び方位が同じ関係にある画素である。
【0176】
真航跡探知処理部234は、相対航跡用画像メモリ32に記憶された第2マークJに基づいて、接近物標の真航跡を他の真航跡と区別して表示するための第3マークMを真航跡用画像メモリ42に書き込むためのものである。
【0177】
図22を参照して、真航跡探知処理部234の構成について説明する。図22は、真航跡探知処理部234の構成を示したブロック図である。図22に示すように、真航跡探知処理部234は、第3中間データ発生部281と、第3マーク判定部282と、ラインメモリ283と、2つのシフト部284,285と、を備える。
【0178】
第3中間データ発生部281は、第3マーク判定部282が接近物標及びその航跡を検出する判定を行うための第3中間データKを生成する。第3中間データ発生部281には、真航跡用画像メモリ42から真航跡データZが入力されるとともに、相対航跡用画像メモリ32から第2マークJが入力されている。
【0179】
また、第3中間データ発生部281には、真航跡用画像メモリ42において検出画素の近傍に位置する比較画素a,b,cの値が入力されている。図23に示すように、この比較画素a,b,cと検出画素との位置関係は、第1実施形態で相対航跡用画像メモリ32に関して説明した比較画素a,b,cと検出画素との位置関係と全く同様である。比較画素a,b,cの値は、検出画素を検出する前に生成された第3中間データKであり、それぞれの画素に設定される。更に、第3中間データ発生部281には、検出画素のアドレスを特定するための変数m及びnが入力されている。
【0180】
この第3中間データ発生部281は、検出画素のアドレスに従って、(真航跡用画像メモリ42ではなく)相対航跡用画像メモリ32の内容を読み出し、検出画素が前記の接近物標存在画素であることを示す第2マークJ(J=1)を検出した場合は、真航跡用画像メモリ42に記憶されている検出画素の真航跡データZを第3中間データKに設定する。
【0181】
なお、真航跡用画像メモリ42には真航跡データZが記憶され、相対航跡用画像メモリ32には相対航跡データWが記憶される。ここで、自船の位置から物標が現在存在する画素の位置(即ち、値として255が設定される画素の位置)までの距離及び方向等の位置関係については、真航跡用画像メモリ42と相対航跡用画像メモリ32とで同じである。従って、メモリ上の自船の位置から同じ距離及び同じ方向に位置する画素は、相対航跡用画像メモリ32と、真航跡用画像メモリ42と、でその値が等しくなる。
【0182】
本実施形態では、このことを利用して、相対航跡用画像メモリ32で第2マークJが付けられた画素(接近物標存在画素)に対応する真航跡用画像メモリ42の画素を、マーク処理の起点となるトリガ画素としている。なお、このトリガ画素において、真航跡データZの値は常に255である。そして、当該トリガ画素を起点として真航跡データZの値を辿ることで、当該接近物標とその真軌跡の全体にわたって第3マークMを付けることとしているのである。また、前述の第1実施形態で説明した相対航跡用画像メモリ32のスキャンと全く同様の考え方で、本実施形態では真航跡用画像メモリ42についても、スキャン方向(開始画素の位置)を変更しながらスキャンが4回繰り返される。これにより、接近物標がどの方向に移動する場合でも、その真航跡について確実に第3マークMを付けることができる。
【0183】
また、第3中間データ発生部281は、検出画素の真航跡データZの値と前記比較画素の値とを比較し、所定の判定条件を満たす場合にも、当該検出画素の真航跡データZの値を第3中間データKの値として設定する。
【0184】
具体的には、第3中間データ発生部281は、真航跡データZの値が、比較画素aの値又は比較画素bの値又は比較画素cの値のうち少なくとも何れか1つと等しい値である又は比較画素の値より1だけ小さい値である場合に、判定条件を満たすと判断する。なお、比較画素の値が何れも0ではないことが条件である。
【0185】
言い換えれば、第3中間データ発生部281は、以下の3つの条件を判定している。即ち、(1)比較画素aについて、a≠0であって、真航跡データZ=a又はZ=a−1の関係が成立するか否か、(2)比較画素bについて、b≠0であって、Z=b又はZ=b−1の関係が成立するか否か、及び、(3)比較画素cについて、c≠0であって、Z=c又はZ=c−1の関係が成立するか否かである。そして、(1)〜(3)の関係が1つでも成立すれば、判定条件を満たしたことになるのである。
【0186】
第3マーク判定部282は、第3中間データKの値に基づいて、接近物標及びその航跡であることを示す第3マークMを真航跡用画像メモリ42に書き込むことができる。第3マーク判定部282は、第3中間データKの値に基づいて、接近物標が存在する画素と当該接近物標の航跡を示す画素とにM=1を設定し、それ以外の画素にはM=0を設定し、このMの値を、真航跡用画像メモリ42の対応するアドレスに記憶させる。
【0187】
図24及び図25のフローチャートを参照して、第3マークMを付ける具体的な処理について説明する。接近物標の真航跡探知処理が開始されると、図24のフローが開始される。以下の説明において、真航跡用画像メモリ42の検出処理中の画素のアドレスを(Xg+m,Yg+n)と表現することがある。なお、真航跡用画像メモリ42の開始画素の開始アドレスは(Xg,Yg)であるとし、終了画素の終了アドレスは(Xg+M−1,Yg+N−1)であるとする。そして、変数mは(M>m≧0)の条件を満たし、変数nは(N>n≧0)の条件を満たすものとする。
【0188】
第3中間データ発生部281は、検出画素のY座標(Yg+n)を決定するnの値が0であるか否かを調べることで、1ライン目の処理であるか否かを調べる(S601)。n=0である場合、比較画素a及びbの値を0に設定する(S602)。n=0でない場合(2ライン目以降の場合)は、処理する画素が左端であるか否かを調べるために、mの値が0であるか否かを調べる(S603)。m=0である場合、つまり、処理する画素が左端である場合は、予めラインメモリ283に記憶されている比較画素bの値を取得する(S604)とともに、比較画素aの値を0に設定する(S605)。m=0でない場合は、予めラインメモリ283に入力されていた比較画素a及びbの値を取得する(S606)。
【0189】
次に、第3中間データ発生部281は、mの値に応じて比較画素cの値を設定する。より具体的には、検出画素のX座標(Xg+m)を決定するmの値が0であるか否かを調べる(S607)。そして、m=0の場合は、cの値を0に設定する(S608)。m=0でない場合、シフト部284から遅延されてきた第3中間データKの値をcの値として設定する(S609)。
【0190】
次に、第3中間データ発生部281が第2マークJを相対航跡用画像メモリ32から取得するとともに真航跡用画像メモリ42から真航跡データZを取得し、また、第3マーク判定部282が、真航跡用画像メモリ42から真航跡データZ及び過去の第3マークM’を取得する(S610)。そして、第3中間データ発生部281は、当該画素に前記接近物標が存在しているか否かをJの値に基づいて調べ(S611)、接近物標が存在している場合(即ち、当該画素が前記接近物標存在画素である場合、J=1である場合)は、真航跡データZの値を第3中間データKの値に設定する(S612)。
【0191】
S611の処理の条件を満たしていない場合(J=0の場合)、第3中間データ発生部281は、真航跡データZの値と、前述の処理で設定した比較画素a,b,cの値と、を比較して、前記の判定条件を満たしているか否かを調べる(S613)。判定条件を満たしている場合には、当該真航跡データZの値を第3中間データKの値として設定する(S612)。S613の処理で、判定条件を満たしていない場合は、第3中間データKの値を0に設定する(S614)。
【0192】
次に、第3中間データ発生部281は、設定した第3中間データKを第3マーク判定部282に出力するとともに、ラインメモリ283にも出力し、当該ラインメモリ283に第3中間データKを記憶させる(S615)。第3マーク判定部282は、受信した第3中間データKの値が0より大きいか否かを調べる。(S616)。第3中間データKが0より大きい場合は、当該画素におけるMの値を1に設定する(S617)。これによって、接近物標及びその真航跡データが存在する画素にM=1が設定される(第3マークMが付けられる)ことになる。
【0193】
また、S616の判断で第3中間データKの値が0である場合は、第3マーク判定部282は、真航跡用画像メモリ42に記憶されるM’の値(過去のMの値)を調べる(S618)。即ち、上述したように、本実施形態ではあらゆる方向に移動する接近物標の真航跡を検出するために、スキャン方向を変更しながら接近物標の真航跡の検出処理を4回繰り返す。そして、検出可能な接近物標の真航跡はスキャン方向に応じて異なるため、それまでに接近物標又はその真航跡として検出されてMの内容として1が設定されていたものが、スキャン方向を変更して当該画素が接近物標(真航跡)として検出されなくなったときに、Mの内容に0が上書きされてしまう場合がある。このような事態を防止するため、S616の判断で第3中間データKの値が0であった場合でも、過去の第3マークを示すM’の値が1であり、かつ真航跡データZの値が0より大きいか否かを調べ(S618)、その条件を満たす場合は、Mの値を1に設定するのである(S617)。S618の判断で過去のM’の値が1でない場合(過去のスキャン処理によってM=1が設定されていなかった場合)には、Mの値を0に設定する(S619)。
【0194】
なお、S618で真航跡データZの値が0より大きいか否かを判断するのは、その画素の位置には既に物標や真航跡が存在しなくなっているのに、レーダアンテナ1の1回転前のデータに基づいてMの内容に1が設定されている場合があり、この場合はMの内容を0にすべきだからである。
【0195】
第3マーク判定部282は、S617又はS619の処理で設定されたMの値を真航跡用画像メモリ42に書き込む(S620)。
【0196】
以上に示したS601〜S620の処理を真航跡用画像メモリ42の全画素に対して繰り返し行うことで、真航跡用画像メモリ42の各画素に第3マークMが設定される。そして、この検出処理を開始画素の位置を変更しながら4回行うことで、あらゆる方向に移動する接近物標の真航跡を検出し、真航跡用画像メモリ42に第3マークMとして記憶することができる。
【0197】
図26は、第2マークJに基づいて第3マークMを書き込む様子を示した模式図である。図26(a)に示すように、画像処理装置210は、相対航跡データWに基づき、第1マークG及び第2マークJを、相対航跡用画像メモリ32において所定の画素に付ける。そして画像処理装置210は、図26(b)に示すように、相対航跡用画像メモリ32において第2マークJが付けられた画素に対応する真航跡用画像メモリ42の画素から真航跡を辿ることで、接近物標とその真航跡に第3マークMを設定する。
【0198】
次に、図27及び図28を参照して、スキャン方向の切替えについて具体的に説明する。図27及び図28には、自船に接近しつつある4つの物標A、物標B、物標C及び物標Dの航跡が記憶された真航跡用画像メモリ42の内容が概念的に示されている。物標Aは画面左上から、物標Bは画面右上から、物標Cは画面左下から、物標Dは画面右下から、それぞれ自船に接近している。
【0199】
なお、図27及び図28に示される真航跡データの例において、一見して物標A〜Dは自船の近くを通過するだけであり、自船に対しては衝突しないようにも見える。しかし、今回の例では自船は基準方位(画面の真上)に向かって一定速度で移動しているので、この例に対応する相対航跡データは図17及び図18のようになる。即ち、真航跡データZでは若干わかりにくいが、図27及び図28に示す物標A〜Dは、何れも前記接近物標に該当し、自船に衝突する危険がある。従って、相対航跡用画像メモリ32においては、前記接近物標探知処理部34により、物標A〜Dそれぞれの現在の位置に相当する画素に第2マークJが付けられている。
【0200】
以下、真航跡用画像メモリ42のスキャンについて説明する。まず、図27(a)に示すように、開始画素を左上隅の画素に設定し、終了画素を右下隅の画素に設定してスキャンが行われる。このスキャンにより、物標Dの現在位置とその航跡に第3マークM(M=1)が設定される。次に、図27(b)に示すように、開始画素を左下隅の画素に設定し、終了画素を右上隅の画素に設定してスキャンが行われる。これにより、物標Bの現在位置とその航跡に第3マークM(M=1)が設定される。続いて、図28(c)に示すように、開始画素を右下隅の画素に設定し、終了画素を左上隅の画素に設定してスキャンが行われる。これにより、物標Aの現在位置とその航跡に第3マークM(M=1)が設定される。最後に、図28(d)に示すように、開始画素を右上隅の画素に設定し、終了画素を左下隅の画素に設定してスキャンが行われる。これにより、物標Cの現在位置とその航跡に第3マークM(M=1)が設定される。
【0201】
以上の処理によって、あらゆる方向から接近する前記接近物標とその航跡に対応する画素に第3マークM(M=1)を設定し、真航跡用画像メモリ42に記憶することができる。本実施形態において真トレイルモードが選択された場合、真航跡用画像メモリ42からカラーパレット21に送信された画像データは、第3マークM(M=1)が設定されている画素が他の物標と異なるように強調して表示器19に表示される。これにより、例えば、相対的に自船に真っ直ぐ向かってくる物標(接近物標)及びその真航跡は赤く描かれ、それ以外の物標及びその真航跡は青く描かれるような画面表示が可能になる。
【0202】
なお、前述したように、図27及び図28に示す真航跡用画像メモリ42のスキャンは、図17及び図18に示す相対航跡用画像メモリ32のスキャンと同時並行的に行われる。即ち、スキャン用アドレス発生部35は、相対航跡用画像メモリ32に記憶されている相対航跡データをスキャンするための相対航跡スキャン用アドレスを生成するとともに、真航跡用画像メモリ42に記憶されている真航跡データをスキャンするための真航跡スキャン用アドレスを生成する。これらのスキャン用アドレスに基づいて、相対航跡用画像メモリ32で、ある位置の画素について第2マークJの処理が行われるとき、真航跡用画像メモリ42においては、第2マークJの処理が行われた画素の位置(相対航跡用画像メモリ32上の画素位置)に対応する位置の画素(真航跡用画像メモリ42上の画素位置)について第3マークMの処理が行われる。従って、図17(a)のスキャンと図27(a)のスキャンが並行して行われ、次に図17(b)のスキャンと図27(b)のスキャンが並行して行われ、・・・というように、2つの航跡用画像メモリのスキャンが同時進行的に処理される。これにより、処理時間を短縮することができる。
【0203】
以上に示したように、本実施形態の画像処理装置210は、複数の航跡データを、前記物標の絶対的な位置変化を示す真航跡データ群として記憶可能な真航跡用画像メモリ42を備える。そして、当該画像処理装置210は、真航跡データ群に基づいて、物標とともにその物標の真航跡が表示されるように画像処理を行う。
【0204】
これにより、絶対的な位置変化を示すため、自船(レーダアンテナ1が探知信号を送信した送信位置)に対して相対的に接近しつつあるか否かを即座に判断できないような真航跡データ群に基づいて航跡を表示する場合であっても、接近物標が他の物標と区別して表示されるので、衝突の危険性を即座かつ直感的に判断できる。
【0205】
また、本実施形態の画像処理装置210は、相対航跡判定処理部33によって接近物標と判定された物標の真航跡が、他の物標の真航跡と区別して表示されるように画像処理を行う。
【0206】
これにより、接近物標だけではなく真航跡が区別して表示されるので、衝突の危険性をより直感的に判断できる。なお、相対トレイルモードを選択した場合において、接近物標の相対航跡が他の物標の相対航跡と区別して表示されるように画像処理を行うように構成することもできる。
【0207】
以上に本発明の実施形態を説明したが、上記の構成は更に以下のように変更することができる。
【0208】
第1実施形態の画像処理装置10は、相対航跡のみを表示する構成に変更することができる。同様に、第2実施形態の画像処理装置210は、真航跡のみを表示する構成に変更することもできる。また、第1実施形態の画像処理装置10及び第2実施形態の画像処理装置210の何れにおいても、画面上に航跡を表示しないように設定することも可能である。
【0209】
第1実施形態の画像処理装置10が搭載されるレーダ装置5の警報システムは、接近物標が警報範囲に入ったことによって報知部が作動する構成であれば、事情に応じて適宜変更することができる。例えば、報知部をブザー23から警告ランプ等のようなオペレータの視覚に訴える手段に変更することもできる。また、表示器19に「接近物標を検出中!!」等の文字を表示する構成に変更することもできる。
【0210】
前記警報システムに設定される警報範囲は、図19のような形状とすることに限定されない。例えば、前記警報範囲を、自船を中心とする所定半径の円の領域とすることができる。
【0211】
第2実施形態の画像処理装置210において、接近物標とその航跡を区別して表示する構成は、事情に応じて適宜変更することができる。例えば、接近物標の現在位置だけを他の物標とは異なる色で表示させたり、接近物標だけについて、その現在位置(又は真航跡)を点滅表示させたりする構成に変更することができる。
【0212】
また、本実施形態の画像処理装置10は、レーダ装置5に搭載される構成であるが、この構成に限定される訳ではない。例えば、画像処理装置をレーダ装置と独立して別個に配置し、画像処理装置がレーダ装置と通信のやり取りを行って画像処理を行う構成にすることもできる。
【0213】
また、上記実施形態では、マーク(第1マークG、第2マークJ及び第3マークM)は、所定の条件の下で相対航跡データW又は真航跡データZの値が1ずつ増加又は減少する場合に、連続性を有するように設定される中間データ(中間データF、第2中間データH及び第3中間データK)の値に基づいて設定されている。しかし、マークの設定方法は、上記実施形態の方法に限定される訳ではなく、事情に応じて適宜変更することが可能である。次に、マークの設定方法の変形例について説明する。
【0214】
まず、第1マークGの設定(中間データFの設定)方法の変形例について説明する。例えば、相対航跡判定処理部33が、図7のS205の判断において、以下の条件に基づいて中間データFの値を設定するように構成することもできる。即ち、S205の判断において、検出画素の相対航跡データWの値が、W=255−(F’+(0〜2))の関係を満たすか否かに基づいて連続性の有無を判定する。そして、上記関係が成立すれば、連続性を満たしていると判断し、連続性を満たすように、相対航跡データの値に応じて中間データを適宜の値に設定する。
【0215】
このように、相対航跡データWの連続性の有無を判断する際の条件に幅を持たせて中間データを生成することで、自船に対して相対的に低速で移動する船においても、接近物標として検出することができる。より具体的には、注目する物標が低速で移動している場合、物標が存在する画素(画素情報の値が255の画素)側から相対航跡データWの値が252、249・・・の順に並ぶような場合がある。このような場合でも、上記方法を採用することで、中間データが連続性を有するように生成されることになる。これによって、低速で移動している物標を接近物標としてより確実に検出することが可能になる。
【0216】
次に、隣接する画素を考慮することにより、連続性を検出できるように中間データを生成する方法について説明する。例えば、レーダアンテナ1が1回転する間に、物標が2画素分以上相対的に移動することがある。このような場合では、航跡データ発生部41によって設定される航跡データの値は、スイープライン上で255、0、254、0、253・・・のように並び、現実には自船に対して相対的に移動している物標であっても、スイープライン上で隣り合う相対航跡データWの値が連続性を有しない場合がある。
【0217】
このような場合でも、隣接する画素を考慮することにより、連続性を検出できるように中間データを生成することが可能である。より具体的には、0が検出された画素と、スイープライン上で隣り合う画素と、を比較し、スイープライン方向で0を挟み込む画素の相対航跡データWの値が連続性を有している場合には、0を挟み込んでいる画素の相対航跡データの値に応じて中間データFを生成する。例えば、254、0、253の順にスイープライン方向で相対航跡データWの値が並んでいた場合、0をスイープライン方向で挟んで位置する画素の相対航跡データWの値である254と253を比較する。この254と253は、連続性を有しているので、0の画素には、253(又は254)の値に基づいて中間データFが連続性を有するように生成される。
【0218】
なお、間に存在する0の数をいくつ許容するかは、レーダの表示レンジや画像メモリの画素数等に応じて適宜設定することができる。例えば、254、0、0、253の順に相対航跡データWの値が並んでいる場合においても、0を挟み込んでいる254と253との値に基づいて相対航跡データの値が連続性を有しているとみなして、その値に応じた中間データを生成することができる。これにより、物標が相対的に高速移動している場合でも、その物標を接近物標として判定することができる。
【0219】
次に、第2マークJの設定(第2中間データHの設定)方法の変形例について説明する。例えば、第2マークJの設定方法においては、図15のS413の処理の判定条件を以下のように設定することができる。即ち、比較画素aの値がa≠0であって、相対航跡データW=a又はW=a+(1〜3)の条件を満たすときに、連続性を満たすと判定するように判定条件を設定する。なお、比較画素b及び比較画素cについても、比較画素aと同様の条件に設定する。この判定条件に基づいて設定された第2中間データHが所定値Sと一致した場合に、その画素に第2マークJが付けられる(J=1に設定される)のである。このように判定条件を設定することで、注目する物標が低速で移動している場合でも、接近物標に対応する画素に第2マークJを適切に付与することができるのである。なお、第2マークJの設定方法においても、第1マークGの設定の変形例と同様に、0を許容する処理を行うことで、高速移動している物標に対応することができる。
【0220】
更に、第2実施形態の第3マークMの設定方法においても、幅を持たせて第3中間データKを生成するように構成することができる。例えば、第3マークMの設定方法においては、図25のS613の処理の判定条件を以下のように設定することができる。即ち、真航跡データZ=a又はZ=a−(1〜3)の条件を満たすときに、第3中間データKの値に真航跡データZの値を設定し、条件を満たさない場合には、第3中間データKの値に0を設定するのである。なお、比較画素b及び比較画素cについても、この変形例の比較画素aと同様の条件に設定する。このように判定条件を設定することで、注目する物標が低速で移動している場合でも、接近物標及びその航跡に対応する画素に第3マークMを適切に付与することができるのである。なお、第3マークMの設定方法においても、第1マークGの設定の変形例と同様に、0を許容する処理を行うことで、高速移動している物標に対応することができる。
【符号の説明】
【0221】
5 レーダ装置
10 画像処理装置
19 表示器
23 ブザー(報知部)
32 相対航跡用画像メモリ(相対軌跡用画像メモリ)
33 相対航跡判定処理部(接近物標判定処理部)
34 接近物標探知処理部(接近物標位置取得部)
36 警報範囲判定部
41 航跡データ発生部(軌跡データ発生部)
42 真航跡用画像メモリ(真軌跡用画像メモリ)
51 第1中間データ発生部(中間データ発生部)
52 第1マーク判定部(中間データ判定部)
【特許請求の範囲】
【請求項1】
方位を異ならせて送信した探知信号に対して取得されたエコー信号により探知された物標の、前記探知信号を送信した送信位置に対する相対的な位置変化を示す相対軌跡データ群を記憶可能な相対軌跡用画像メモリと、
前記相対軌跡用画像メモリに記憶される前記相対軌跡データ群のうち、同じスイープライン上に存在する相対軌跡データに基づいて、前記探知信号により探知された物標が前記送信位置に接近する接近物標であるか否かを判定する接近物標判定処理部と、
を備えることを特徴とする画像処理装置。
【請求項2】
請求項1に記載の画像処理装置であって、
前記接近物標判定処理部によって前記接近物標と判定された物標が他の物標と区別して表示されるように画像処理を行うことを特徴とする画像処理装置。
【請求項3】
請求項2に記載の画像処理装置であって、
前記相対軌跡データ群に基づいて、物標とともにその物標の相対軌跡が表示されるように画像処理を行うことを特徴とする画像処理装置。
【請求項4】
請求項2に記載の画像処理装置であって、
前記エコー信号により探知された物標の絶対的な位置変化を示す真軌跡データ群を記憶可能な真軌跡用画像メモリを備え、
前記真軌跡データ群に基づいて、物標とともにその物標の真軌跡が表示されるように画像処理を行うことを特徴とする画像処理装置。
【請求項5】
請求項3又は4に記載の画像処理装置であって、
前記接近物標判定処理部によって前記接近物標と判定された物標の相対軌跡又は真軌跡が、他の物標の相対軌跡又は真軌跡と区別して表示されるように画像処理を行うことを特徴とする画像処理装置。
【請求項6】
請求項1から5までの何れか一項に記載の画像処理装置であって、
前記相対軌跡データは、前記相対軌跡用画像メモリを構成する画素単位で生成される情報であって、前記物標が直近に検出されてからの経過時間に応じて段階的に変化する情報であり、
前記接近物標判定処理部は、
前記スイープライン上で物標が検出された場合に、その検出位置を起点として前記送信位置から離れる方向で、前記相対軌跡データの値が当該スイープライン上で画素的な連続性を保ちつつ所定の条件を満たしながら変化する場合に、その画素が、前記接近物標に係る相対軌跡に含まれていると判定することを特徴とする画像処理装置。
【請求項7】
請求項6に記載の画像処理装置であって、
前記所定の条件は変更可能であることを特徴とする画像処理装置。
【請求項8】
請求項6又は7に記載の画像処理装置であって、
前記接近物標に係る相対軌跡に含まれていると前記接近物標判定処理部によって判定された画素から、当該相対軌跡の前記接近物標が現在存在する画素を前記相対軌跡データ群に基づいて求める接近物標位置取得部を備えることを特徴とする画像処理装置。
【請求項9】
請求項1から8までの何れか一項に記載の画像処理装置であって、
予め設定される警報範囲の内部に前記接近物標が存在することを検出する警報範囲判定部と、
前記警報範囲判定部によって前記接近物標が検出されると作動する報知部と、を備えることを特徴とする画像処理装置。
【請求項10】
請求項1から9までの何れか一項に記載の画像処理装置を搭載したことを特徴とするレーダ装置。
【請求項11】
方位を異ならせて送信した探知信号に対して得られるエコー信号を取得するエコー信号取得ステップと、
前記エコー信号により探知された物標の、前記探知信号を送信した送信位置に対する相対的な位置変化を示す相対軌跡データ群を記憶させるステップと、
前記相対軌跡データ群のうち、同じスイープライン上に存在する相対軌跡データに基づいて、前記探知信号により探知された物標が前記送信位置に接近する接近物標であるか否かを判定するステップと、
を含むことを特徴とする画像処理方法。
【請求項12】
方位を異ならせて送信した探知信号に対して得られるエコー信号を取得するエコー信号取得ステップと、
前記エコー信号により探知された物標の、前記探知信号を送信した送信位置に対する相対的な位置変化を相対軌跡データ群として記憶させるステップと、
前記相対軌跡データ群のうち、同じスイープライン上に存在する相対軌跡データに基づいて、前記探知信号により探知された物標が前記送信位置に接近する接近物標であるか否かを判定するステップと、
を含む処理をコンピュータに実行させることを特徴とする画像処理プログラム。
【請求項1】
方位を異ならせて送信した探知信号に対して取得されたエコー信号により探知された物標の、前記探知信号を送信した送信位置に対する相対的な位置変化を示す相対軌跡データ群を記憶可能な相対軌跡用画像メモリと、
前記相対軌跡用画像メモリに記憶される前記相対軌跡データ群のうち、同じスイープライン上に存在する相対軌跡データに基づいて、前記探知信号により探知された物標が前記送信位置に接近する接近物標であるか否かを判定する接近物標判定処理部と、
を備えることを特徴とする画像処理装置。
【請求項2】
請求項1に記載の画像処理装置であって、
前記接近物標判定処理部によって前記接近物標と判定された物標が他の物標と区別して表示されるように画像処理を行うことを特徴とする画像処理装置。
【請求項3】
請求項2に記載の画像処理装置であって、
前記相対軌跡データ群に基づいて、物標とともにその物標の相対軌跡が表示されるように画像処理を行うことを特徴とする画像処理装置。
【請求項4】
請求項2に記載の画像処理装置であって、
前記エコー信号により探知された物標の絶対的な位置変化を示す真軌跡データ群を記憶可能な真軌跡用画像メモリを備え、
前記真軌跡データ群に基づいて、物標とともにその物標の真軌跡が表示されるように画像処理を行うことを特徴とする画像処理装置。
【請求項5】
請求項3又は4に記載の画像処理装置であって、
前記接近物標判定処理部によって前記接近物標と判定された物標の相対軌跡又は真軌跡が、他の物標の相対軌跡又は真軌跡と区別して表示されるように画像処理を行うことを特徴とする画像処理装置。
【請求項6】
請求項1から5までの何れか一項に記載の画像処理装置であって、
前記相対軌跡データは、前記相対軌跡用画像メモリを構成する画素単位で生成される情報であって、前記物標が直近に検出されてからの経過時間に応じて段階的に変化する情報であり、
前記接近物標判定処理部は、
前記スイープライン上で物標が検出された場合に、その検出位置を起点として前記送信位置から離れる方向で、前記相対軌跡データの値が当該スイープライン上で画素的な連続性を保ちつつ所定の条件を満たしながら変化する場合に、その画素が、前記接近物標に係る相対軌跡に含まれていると判定することを特徴とする画像処理装置。
【請求項7】
請求項6に記載の画像処理装置であって、
前記所定の条件は変更可能であることを特徴とする画像処理装置。
【請求項8】
請求項6又は7に記載の画像処理装置であって、
前記接近物標に係る相対軌跡に含まれていると前記接近物標判定処理部によって判定された画素から、当該相対軌跡の前記接近物標が現在存在する画素を前記相対軌跡データ群に基づいて求める接近物標位置取得部を備えることを特徴とする画像処理装置。
【請求項9】
請求項1から8までの何れか一項に記載の画像処理装置であって、
予め設定される警報範囲の内部に前記接近物標が存在することを検出する警報範囲判定部と、
前記警報範囲判定部によって前記接近物標が検出されると作動する報知部と、を備えることを特徴とする画像処理装置。
【請求項10】
請求項1から9までの何れか一項に記載の画像処理装置を搭載したことを特徴とするレーダ装置。
【請求項11】
方位を異ならせて送信した探知信号に対して得られるエコー信号を取得するエコー信号取得ステップと、
前記エコー信号により探知された物標の、前記探知信号を送信した送信位置に対する相対的な位置変化を示す相対軌跡データ群を記憶させるステップと、
前記相対軌跡データ群のうち、同じスイープライン上に存在する相対軌跡データに基づいて、前記探知信号により探知された物標が前記送信位置に接近する接近物標であるか否かを判定するステップと、
を含むことを特徴とする画像処理方法。
【請求項12】
方位を異ならせて送信した探知信号に対して得られるエコー信号を取得するエコー信号取得ステップと、
前記エコー信号により探知された物標の、前記探知信号を送信した送信位置に対する相対的な位置変化を相対軌跡データ群として記憶させるステップと、
前記相対軌跡データ群のうち、同じスイープライン上に存在する相対軌跡データに基づいて、前記探知信号により探知された物標が前記送信位置に接近する接近物標であるか否かを判定するステップと、
を含む処理をコンピュータに実行させることを特徴とする画像処理プログラム。
【図1】

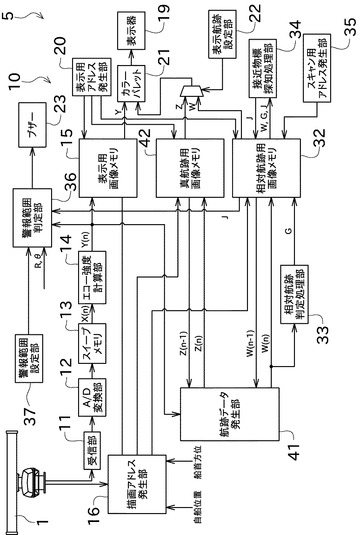
【図2】
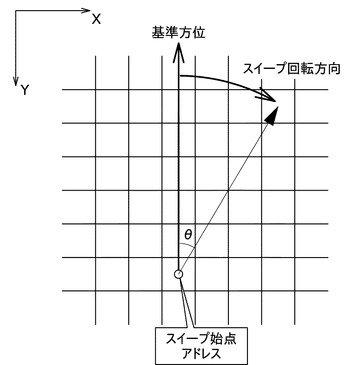
【図3】
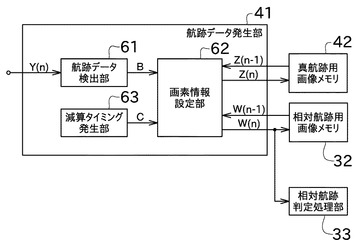
【図4】
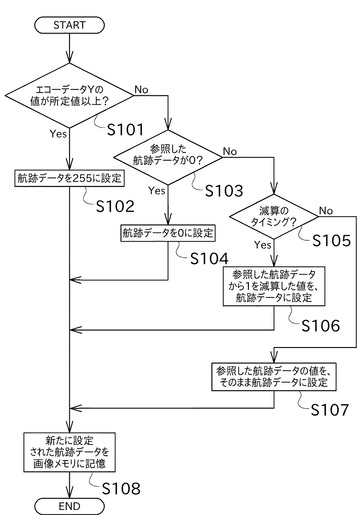
【図5】
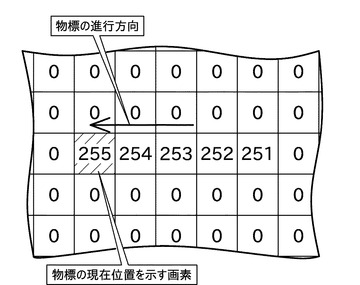
【図6】
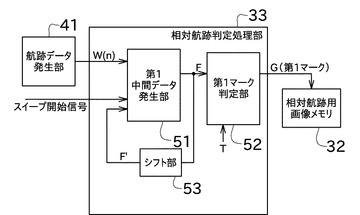
【図7】
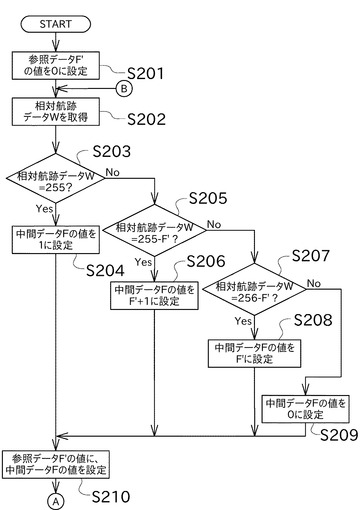
【図8】
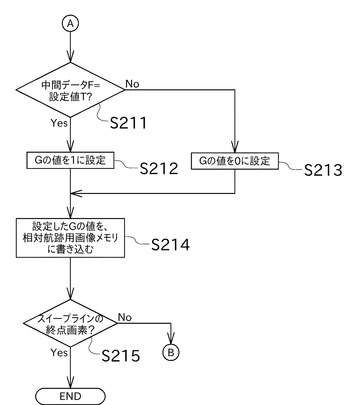
【図9】
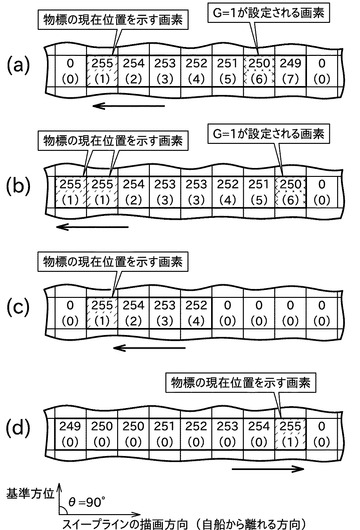
【図10】
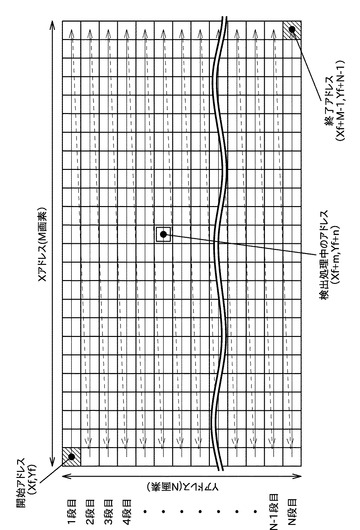
【図11】
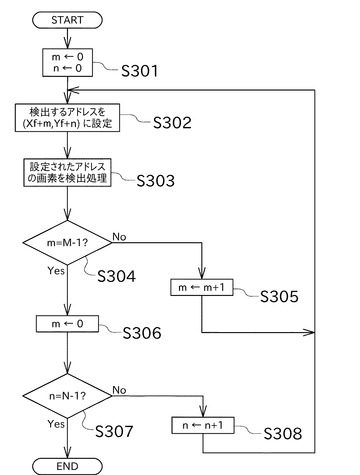
【図12】
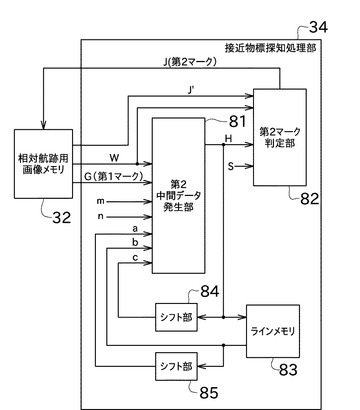
【図13】
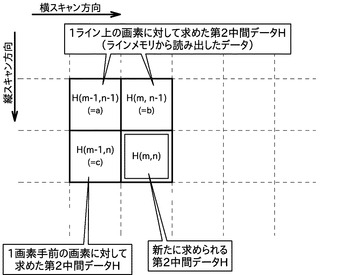
【図14】
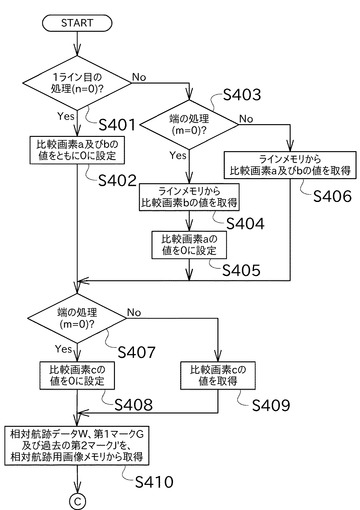
【図15】
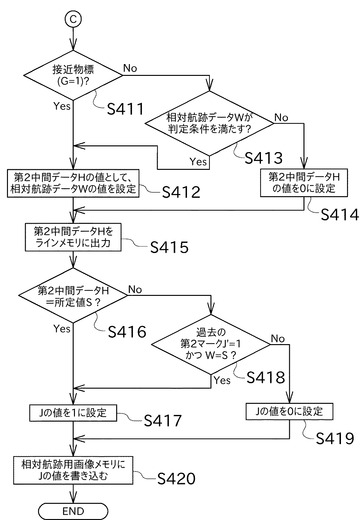
【図16】
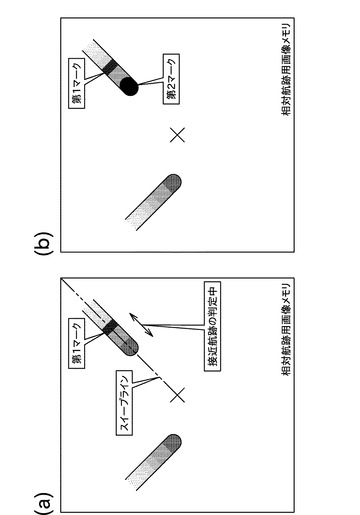
【図17】
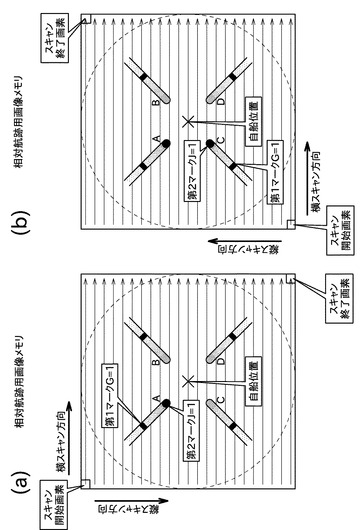
【図18】
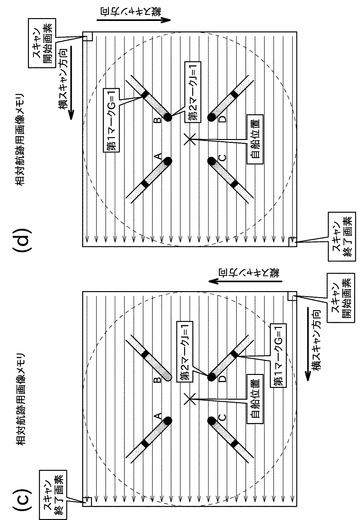
【図19】
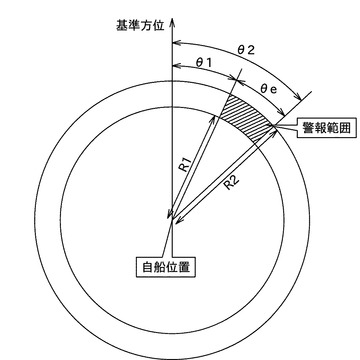
【図20】
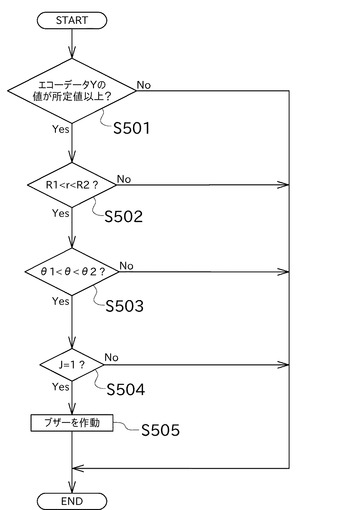
【図21】
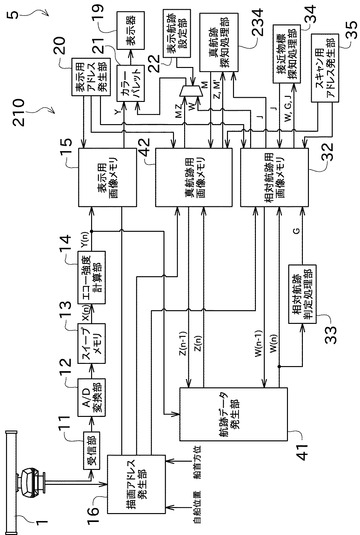
【図22】
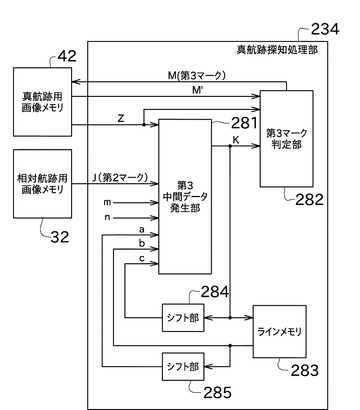
【図23】
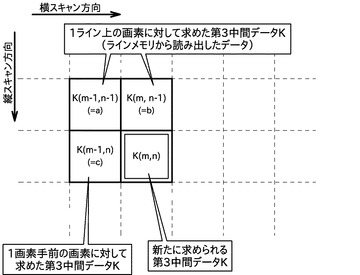
【図24】
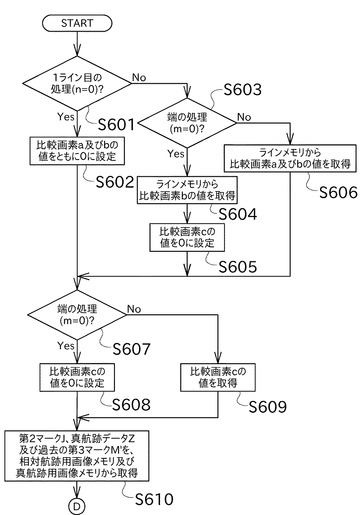
【図25】
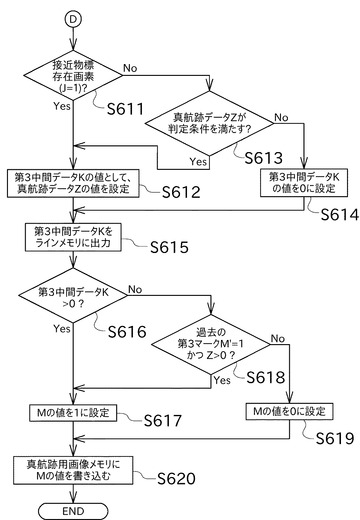
【図26】
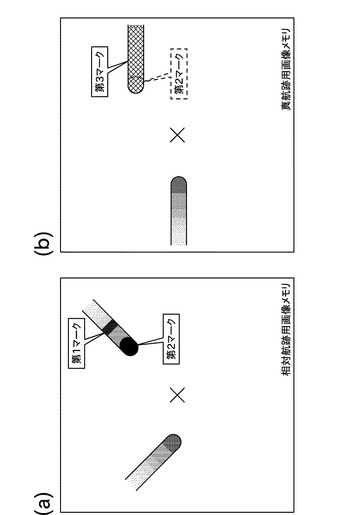
【図27】
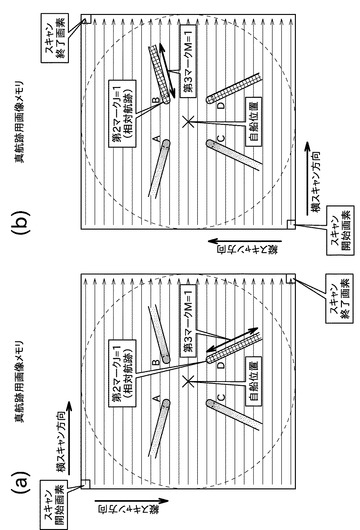
【図28】
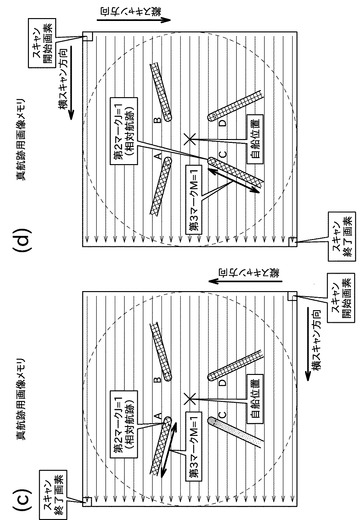
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図23】
【図24】
【図25】
【図26】
【図27】
【図28】
【公開番号】特開2011−59019(P2011−59019A)
【公開日】平成23年3月24日(2011.3.24)
【国際特許分類】
【出願番号】特願2009−210983(P2009−210983)
【出願日】平成21年9月11日(2009.9.11)
【出願人】(000166247)古野電気株式会社 (441)
【Fターム(参考)】
【公開日】平成23年3月24日(2011.3.24)
【国際特許分類】
【出願日】平成21年9月11日(2009.9.11)
【出願人】(000166247)古野電気株式会社 (441)
【Fターム(参考)】
[ Back to top ]