
画像処理装置、及び画像処理を行うためのコンピュータープログラム
【課題】本発明は、設計データ、或いはシミュレーション画像に基づいて、実画像に近いパターンを形成する画像処理装置の提供を目的とする。
【解決手段】上記目的を達成するために、半導体素子の設計データに基づいて、荷電粒子線装置の動作条件を設定する画像処理部を備えた画像処理装置であって、荷電粒子線装置の装置条件情報,パターンの種類、及びパターンの部位毎のパターン情報の複数の組み合わせを記憶するライブラリにアクセスし、装置条件、及びパターンの種類の選択に基づいて、パターンの部位毎のパターン情報を用いた各部位の合成画像を形成する画像処理装置を提案する。
【解決手段】上記目的を達成するために、半導体素子の設計データに基づいて、荷電粒子線装置の動作条件を設定する画像処理部を備えた画像処理装置であって、荷電粒子線装置の装置条件情報,パターンの種類、及びパターンの部位毎のパターン情報の複数の組み合わせを記憶するライブラリにアクセスし、装置条件、及びパターンの種類の選択に基づいて、パターンの部位毎のパターン情報を用いた各部位の合成画像を形成する画像処理装置を提案する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、試料上に形成されたパターンの寸法測定や検査を行うための画像処理装置、及び荷電粒子線装置に係り、特に、測定装置や検査装置の測定,検査条件の設定を可能とする画像処理装置、及びコンピュータープログラムに関する。
【背景技術】
【0002】
半導体ウェハ上に形成されたパターンを計測,検査する装置では、所望の測定位置に顕微鏡の視野(Field Of View:FOV)を合わせるために、テンプレートマッチング技術が用いられている。テンプレートマッチングとは、予め登録されたテンプレート画像と最も一致する領域を、探索画像から見つけ出す画像処理技術であり、微細なパターンを探し出すための有効な手法として知られている。テンプレートマッチングのためのテンプレートは予め用意しておく必要があるが、このようなテンプレート画像を、設計データ(パターンのレイアウトデータ)のシミュレーション画像から作成する手法が、特許文献1,2に説明されている。レイアウトデータは、パターンの理想形状を示すものであり、半導体プロセスを経て実際に形成されるパターンとは形状等の乖離があるため、一致度判定を高精度に行うことが困難となる場合がある。特許文献1,2は、シミュレーションを施した設計データに基づいて、テンプレートを形成しているため、テンプレートと被探索画像上の対象パターンとの形状差を抑制でき、結果としてマッチングの成功率を高めることができる。
【0003】
一方、特許文献3に開示されているように、レイアウトデータと被探索画像のそれぞれに平滑化処理を施すことによって、両者の形状差を抑制する手法が説明されている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2000−236007号公報
【特許文献2】USP7,457,736
【特許文献3】特開2002−328015号公報(対応米国特許USP7,235,782)
【発明の概要】
【発明が解決しようとする課題】
【0005】
半導体プロセスを経て形成されるパターンは、パターンのエッジ部分に広がりを持ち、ある程度の幅をもって形成されている。走査電子顕微鏡(Scanning Electron Microscope:SEM)等の荷電粒子線装置は、試料へのビーム走査に基づいて得られる二次電子等を検出することによって画像を形成する装置であるが、ビームの入射方向に対して、垂直な面を持つ部分よりも、傾斜面を持つ部分の方がより多く二次電子を発生し、当該部分は相対的に輝度が高くなる。レイアウトデータは二次元的な図形形状でしかないが、実際に半導体プロセスを経て形成されるパターンは、或る程度の高さを持ち、またそのエッジ部分は傾斜しているため、エッジ効果によって、レイアウトデータにはない広がりをもってエッジが表現される。
【0006】
特許文献1,2に開示のテンプレート作成法では、このようなエッジ効果が強く影響する部分やSEM画像固有の画像情報を十分に表現することができないため、テンプレートマッチングの高精度化には限度がある。また、特許文献3に開示された画像処理によってもある程度、両者の差異を圧縮することができるが、やはりレイアウトデータにSEM画像に関する情報は含まれていないため、テンプレートマッチングの高精度化には限度がある。
【0007】
以下に、設計データ、或いはシミュレーション画像に基づいて、実画像に近いパターンを形成することを目的とする画像処理装置、及びコンピュータープログラムについて説明する。
【課題を解決するための手段】
【0008】
上記目的を達成するための一態様として、半導体素子の設計データに基づいて、荷電粒子線装置の動作条件を設定する画像処理部を備えた画像処理装置、或いは当該処理をコンピューターに実行させるコンピュータープログラムであって、当該画像処理部は、荷電粒子線装置の装置条件情報,パターンの種類、及びパターンの部位毎のパターン情報の複数の組み合わせを記憶するライブラリにアクセス可能に構成され、前記装置条件、及びパターンの種類の選択に基づいて、前記パターンの部位毎のパターン情報を用いた各部位の合成画像を形成する合成画像形成部を備えた画像処理装置、或いはコンピュータープログラムを提案する。
【発明の効果】
【0009】
上記一態様によれば、荷電粒子線装置による画像取得を行う前に、荷電粒子線装置にて取得した画像に近似した画像を形成することができる。このような構成によれば、例えば、荷電粒子線装置を動作させることなく、テンプレートマッチング用のテンプレートの作成や、テンプレートの検証のための参照画像の作成を容易に実現することが可能となる。
【図面の簡単な説明】
【0010】
【図1】ライブラリの参照に基づいて合成画像(擬似画像)を形成する工程を示すフローチャート。
【図2】半導体測定(或いは検査)システムの一例を示す図。
【図3】シミュレーション画像と合成画像とのマッチング処理工程を示す図。
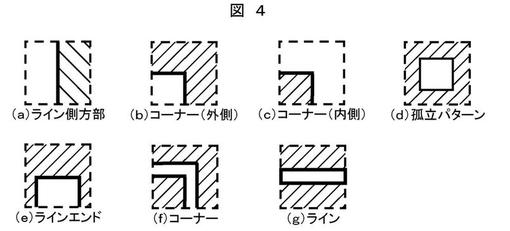
【図4】ライブラリに登録されるパターンの部位ごとの登録画像の例を示す図。
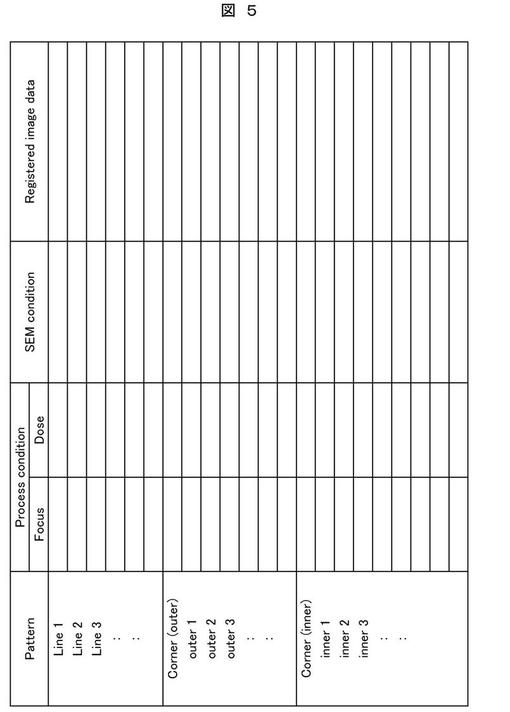
【図5】パターンの種類,電子顕微鏡の装置条件、及び登録画像が関連付けて記憶されたライブラリの一例を示す図。
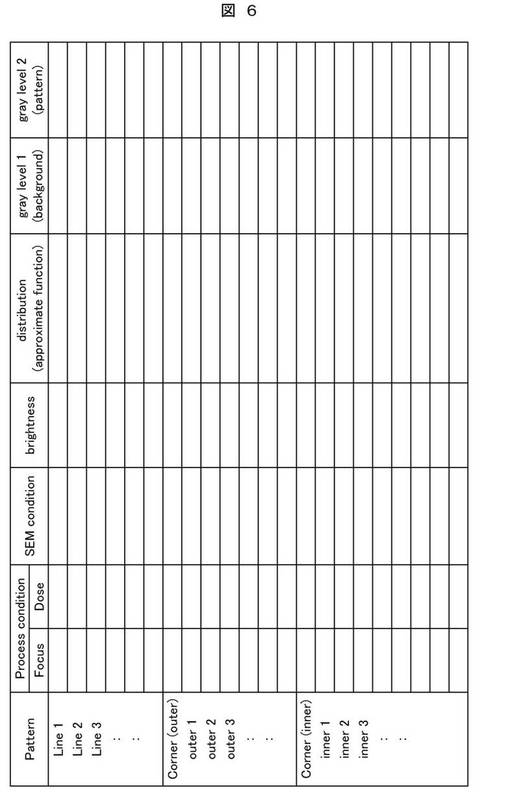
【図6】パターンの種類,電子顕微鏡の装置条件、及びエッジ調整情報が関連付けて記憶されたライブラリの一例を示す図。
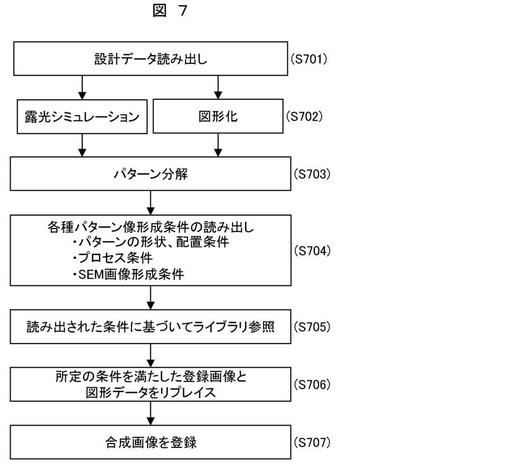
【図7】ライブラリの参照に基づいて合成画像(擬似画像)を形成する工程を示すフローチャート。
【図8】シミュレーション画像と合成画像との比較に基づいて、マッチング用のテンプレートを選択する工程を示すフローチャート。
【図9】登録されたエッジ調整情報と、グレーレベル情報に基づいて、合成画像を形成する工程を示す図。
【図10】登録されたエッジ調整情報と、グレーレベル情報に基づいて、合成画像を形成する工程を示すフローチャート。
【図11】シミュレーション画像に関連付けて記憶された測長部位について測長を実行する例を示す図。
【図12】合成画像の形成例を示す図。
【図13】エミュレーターを用いたレシピの検証工程を示すフローチャート。
【図14】マスク形状と、予測形状との関係を示す図。
【図15】マスクの予測形状に基づく転写シミュレーションの概念図。
【図16】擬似画像形成工程を示す概念図。
【図17】輪郭線画像と測定領域の位置関係を示す図。
【図18】測定領域内に含まれるパターン情報の判定法を示す図。
【図19】測定領域の探索工程を示す図。
【図20】測定領域の探索工程を示すフローチャート。
【発明を実施するための形態】
【0011】
以下に説明する実施例は、半導体製造における半導体露光用のマスク形状及び露光された半導体転写パターンであるシリコン形状を計測する際に用いる測定レシピの作成、或いは測定レシピの妥当性について検証及び補正を行う装置、コンピューターにこれらの処理を実行させるコンピュータープログラム、及び当該コンピュータープログラムを読み取り可能な記憶媒体に関するものであり、半導体製造工程における生産効率を向上させるためのものである。
【0012】
半導体デバイス製造に於ける微細化技術の進展により、製造パターンの微細化は目覚しく、半導体生産における検査・計測において高倍率計測が必要となっている。
【0013】
この高倍率計測の結果、撮像するマスク形状及び半導体転写パターンのSEM画像のホワイトバンドの明瞭さが不安定となり、所望の位置の画像の撮像やエッジ検出が困難となってきており、この結果、測定レシピを用いた自動測定での不良を引き起こす要因となり、生産の効率を低下させることとなる。
【0014】
一方、半導体の多様化による生産における品種数の増大に伴い計測に使用する自動測定のレシピ数も増加し、計測に使用するレシピの運用コストの増大化問題となっている。
【0015】
また、微細化を進めるに当たり、露光技術で使用する光源の波長の限界により超解像度技術(RET)によるOPC(Optical Proximity Correction)の高度化が必須となりこのOPCの高精度化の要求が一般的となっており、この高精度化のための補正情報として1次元形状に加え、膨大な量の2次元形状の計測が必須となっている。
【0016】
更に微細化により転写におけるパターン形状の余裕度が少なくなっており、製品デバイス製造における危険箇所(Hotspot)の管理が歩留まり維持・向上のために必要となってきており、インラインモニターとして2次元の危険箇所の定常的な計測が重要であり、そのための自動測定用の計測レシピの完成度が重要となってきている。
【0017】
以下に説明する実施例では、上記半導体測定における状況に鑑み、測定レシピを容易に作成する装置等について説明する。より具体的には、半導体製造に用いる半導体露光用のマスク形状及び露光された半導体転写パターンであるシリコン形状を計測する際に用いる測定レシピの作成、或いは妥当性の検証を、計測装置(例えば、CD−SEM(Critical Dimension-Scanning Electron Microscope))を使用する事無く行う装置等について、説明する。測定レシピの検証については、計測対象のマスクまたはウェハ上に形成されたパターン画像のエミュレーションを行い、擬似的に測定レシピを実行しその妥当性を検証することによって、測定レシピへの適当な修正を可能とするものである。これにより半導体製造工程におけるレシピ運用の効率化を図るものである。
【0018】
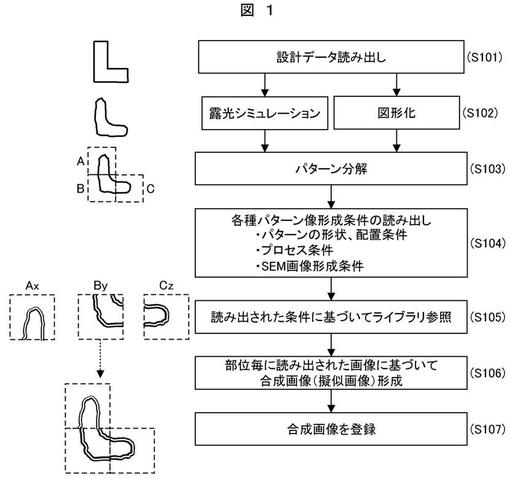
図2は、SEMを含む測定、或いは検査システムの詳細説明図である。本システムには、SEM本体201、当該SEM本体の制御装置203、及び演算処理装置205が含まれている。演算処理装置205には、制御装置203に所定の制御信号を供給するレシピ実行部206と、走査偏向器202の走査と同期して検出器203によって得られた検出信号を配列することによって得られる画像の画像処理を行う画像処理部207、及び取得された画像情報や、レシピ実行部206にて実行するレシピ情報を記憶するメモリ208が内蔵されている。測定レシピは、SEMを自動的に動作させるための動作プログラムであり、測定対象となる試料の種類ごとに、上記メモリ208や外部の記憶媒体に記憶され、必要に応じて読み出される。
【0019】
試料から放出された電子は、検出器203にて捕捉され、制御装置204に内蔵されたA/D変換器でデジタル信号に変換される。画像処理部207に内蔵されるCPU,ASIC,FPGA等の画像処理ハードウェアによって、目的に応じた画像処理が行われる。また、画像処理部207は、検出信号に基づいて、ラインプロファイルを作成し、プロファイルのピーク間の寸法を測定する機能をも備えている。
【0020】
更に演算処理装置205は、入力手段を備えた入力装置219と接続され、当該入力装置219に設けられた表示装置に、操作者に対して画像や検査結果等を表示するGUI(Graphcal User Interface)等の機能を有する。
【0021】
なお、演算処理装置205における制御や処理の一部又は全てを、CPUや画像の蓄積が可能なメモリを搭載した電子計算機等に割り振って処理・制御することも可能である。また、入力装置219は、検査等に必要とされる電子デバイスの座標,位置決めに利用するパターンマッチング用のテンプレート,撮影条件等を含む撮像レシピを手動もしくは、電子デバイスの設計データ記憶媒体218に記憶された設計データを活用して作成する撮像レシピ作成装置としても機能する。
【0022】
入力装置219は、設計データに基づいて形成される線図画像の一部を切り出して、テンプレートとするテンプレート作成部を備えており、作成されたテンプレートは画像処理部207に内蔵されるマッチング処理部209におけるテンプレートマッチングのテンプレートとして、メモリ208に登録される。テンプレートマッチングは、位置合わせの対象となる撮像画像と、テンプレートが一致する個所を、正規化相関法等を用いた一致度判定に基づいて特定する手法であり、マッチング処理部209は、一致度判定に基づいて、撮像画像の所望の位置を特定する。なお、本実施例では、テンプレートと画像との一致の度合いを一致度や類似度という言葉で表現するが、両者の一致の程度を示す指標という意味では同じものである。また、不一致度や非類似度も一致度や類似度の一態様である。
【0023】
以下に説明する実施例は、主に設計データに基づいて得られるエッジ情報と、SEM等によって撮像された撮像画像間との間のパターンマッチングに関するものであり、設計データに基づいて得られるエッジ情報は、設計データに基づいて形成されるパターンの理想形状を示す線分画像情報や、シミュレーター220によって、実パターンに近くなるような変形処理が施された線分画像情報である。また、設計データは例えばGDSフォーマットやOASISフォーマットなどで表現されており、所定の形式にて記憶されている。なお、設計データは、設計データを表示するソフトウェアがそのフォーマット形式を表示でき、図形データとして取り扱うことができれば、その種類は問わない。
【0024】
なお、以下に説明する実施例では、SEMに搭載された制御装置、或いはSEMに通信回線等を経由して接続される演算処理装置205にてマッチング処理を実行する例を説明するが、これに限られることはなく、コンピュータープログラムによって、画像処理を実行する汎用の演算装置を用いて、後述するような処理を行うようにしても良い。更に、集束イオンビーム(Focused Ion beam:FIB)装置等、他の荷電粒子線装置に対しても、後述する手法の適用が可能である。
【0025】
本実施例は、パターンマッチングを行う装置、パターンマッチングをコンピューターに実行させるプログラム、及び当該プログラムを記憶する記憶媒体に関するものである。
【実施例1】
【0026】
前述したように半導体の製造過程における計測の自動運転は生産工程全般における効率化のなかで重要な役割を占めている。しかし、計測レシピによる計測の自動運転は以下に示す要因により自動化率向上の妨げとなっている。
【0027】
半導体製造では対象パターンを転写するために設計データを基にして作成されたマスクレチクルを用いて露光装置によりシリコンウェハ上にパターン形状を形成する。また、エッチング工程においては対象パターン上のエッチングにより除去し所望のパターンを形成する。
【0028】
ウェハパターン形成では、上記の半導体製造工程の様々な変動要因により計測の対象となるパターン寸法が変動し、設計データに対応した理想的な所望のパターン形状として形成されていない場合が多く、特にエッチング工程でのパターン形状はその乖離が大きい場合がある。
【0029】
また、露光に使用するマスクレチクルの製造に於いては、マスク描画のための電子ビーム露光時の誤差やマスク製造におけるエッチングのバラつき等により、設計データに対応した理想的マスク形状が作成さてれていない場合があり、その結果、当該マスクレチクルを使用して露光を行った転写パターンの形状が変動している場合がある。
【0030】
さらに計測においては計測に使用する測定装置毎の機差要因(たとえばステージ座標精度のばらつきや電子ビームシフト精度のばらつき)により計測機毎に測定位置のずれが生じる可能性がある。また、測定レシピにおいて計測のための位置決めを行うパターンの形状ユニーク性の問題により位置決めの正確性が低くなり、所望の位置精度でパターンの計測ができない場合がある。
【0031】
また、プロセスマージンを検証する等の目的で露光装置のドーズやフォーカス条件をウェハ面内で順次変更したウェハ(FEM(Focus Exposure Matrix)ウェハ)の計測では各条件にてパターンの形状が異なったものとなり、計測においてエラーとなる場合が多い。総括すると、測定エラーの要因は、(1)プロセス変動によるウェハパターンの変形、(2)リソグラフィ工程を経て形成されたパターン形状(露光結果)と、エッチング工程を経て形成されたパターン形状との差異、(3)計測装置毎のステージ座標精度のばらつき、(4)計測位置決めのアドレッシングパターンの安定性不足、(5)FEMウェハのように、チップ単位で形状の変化が著しいパターンの存在、が挙げられる。
【0032】
以上のような要因の存在により、撮像の失敗,撮像の失敗に基づく計測部位のずれ、或いは対象パターン以外を計測対象とするという、計測のエラーが発生する。
【0033】
現状、これらの対応として実際のマスクやウェハが製造された後に、これを使用してレシピの実行のテスト(測定パラメータの調整やマッチングテンプレートの差し替え等)を行っており、このためターゲットに対してダメージを与えたり、実際の計測までの時間がかかってしまい、これが製造工程でのボトルネックとなる。本来、自動化の計測レシピはウェハが出来上がるまえに完成してウェハ製造時点でタイムリーに自動計測を行う必要がある。
【0034】
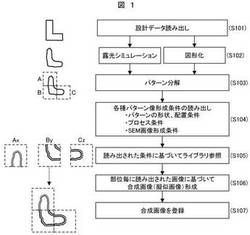
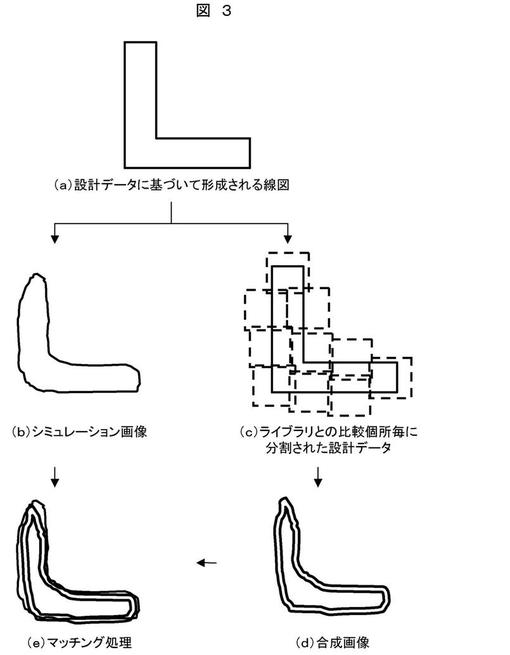
本実施例では、特にウェハ等の計測を行う前に、SEM画像に近いパターン画像の形成を行うことが可能な画像処理装置について説明する。図1は、SEM画像を形成する前に、SEM画像に近似する画像を形成する工程を示すフローチャートである。本実施例では特に、設計データに基づいて画像を形成する例について説明する。まず、ステップ101にて、設計データ記憶媒体218より、設計データを読み出し、当該設計データに基づいて、シミュレーター220等で図形データを作成する(S102)。シミュレーター220では、露光条件等に応じた変形処理に基づいて図形を作成する。また、ここでは単にパターンのレイアウトデータを図形化するだけでも良い。
【0035】
次に、テンプレート生成部210に含まれるレイアウトデータ分解部212にて、形成された図形データを所定の条件に基づいて分解する(ステップ103)。この場合、後述するライブラリに登録された画像に表示された試料領域と同じ大きさ(同じ視野(Field Of View:FOV)サイズ)となる大きさ単位で領域分割を行う。例えば図1に例示するL字型のパターンの場合、領域A〜Cの3つの領域に分割する。
【0036】
次に、領域A,B,Cに相当する領域のパターン形状,配置条件,パターンの製造条件,SEMの画像形成条件(ビーム条件)の読み出しを行う(ステップ104)。このような読み出しは、パターン形状や配置条件については、もとの設計データに予め登録された情報であるため、領域選択に基づいて自動的に読み出しが行われるようにしても良いし、入力装置219からの任意の入力を可能とするようにしても良い。また、製造条件は設計データに登録されている場合には、設計データから読み出すようにしても良いし、入力装置219からの任意の入力を可能とするようにしても良い。
【0037】
SEM画像形成条件については、通常、設計データに登録されているものではないため、別途の設定を行う必要があるが、例えば何等かのデフォルト情報がある場合には、その情報を読み出すようにしても良い。
【0038】
なお、パターンの配置の疎密によって、光近接効果(Optical Proximity Effect:OPE)によるパターンの形状の変化の程度が変わるため、パターンの形状だけではなく、配置条件(疎密の程度)も設定条件として加えることが望ましい。具体的には、対象パターンに最も近接するパターンと対象パターンとの距離や近接するパターンの大きさ等毎に、パターンの種類を分けておくようにすると良い。また、パターン形状の変動要因が他に存在する場合は、その変動要因ごとにパターンの種類を分類するようにしても良い。
【0039】
ステップ105では、読み出されたパターン像形成条件に基づいて、ライブラリを参照する。ライブラリとは、例えば図5に例示するように、パターンの種類(Pattern:パターン形状,配置条件,材質等),プロセス条件(Process condition:露光装置等のフォーカスやドーズ量)、及びSEM画像形成条件(SEM condition:電子顕微鏡のFOVサイズ,加速電圧,フレーム数,ビーム電流,ビームの到達エネルギー等)と、登録画像(Registered image data)が関連付けて記憶されているデータベースである。なお、この組み合わせは一例に過ぎず、SEM画像形成条件を含むパターンの見え方を大きく左右する情報を選択的に用いて、ライブラリを構築するようにしても良い。
【0040】
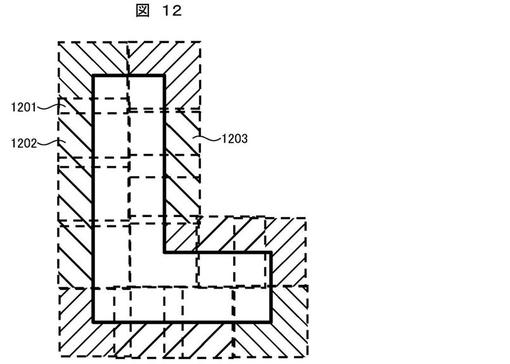
登録画像は、異なる試料や測定工程にて取得した画像を予め各条件の組み合わせに応じて分類して蓄積しておく。図4は、登録画像の例を示す図である。パターン形状は、基本的に直線部とコーナー部からなる幾何学形状であるため、例えば図4の(a)〜(c)のように、直線部と角部(コーナー)の3つのパターン分類を用意すれば、図12に例示するような組み合わせを行うことによって、合成画像を形成することができる。本例にて、パターンの部位毎に画像を分割して登録している理由は、ライブラリを単純化することによるデータ量削減のためであるが、必要に応じて、より複雑な形状をライブラリに登録するようにしても良い。そのパターン形状の類型としては、図4(d)に例示するような孤立パターン、図4(e)に例示するようなラインエンド、図4(f)に例示するようなコーナー、図4(g)に例示するようなライン等が考えられる。孤立パターンは、例えば図4(b)のコーナーの4つの合成像である。このようにパターンの形成状態や繁用するパターン形状等の状況に応じて、登録画像の形状を選択に基づいてライブラリを構築するようにしても良い。
【0041】
なお、ステップ105では、選択されたパターン形成条件と同じ条件、或いは選択されたパターン形成条件と同じとみなせる条件と関連付けて記憶された登録画像を読み出す。なお、ライブラリは、1のパターン種類に対し、複数の登録画像を登録可能とすると共に、測定時に取得された画像を、複数の画像領域に分割すると共に、その際のパターン像形成条件と関連して登録可能とすることによって、測定時のライブラリのアップデートを行うようにして構築すると良い。
【0042】
ステップ106では、置換画像選択部213によって選択された登録画像(例えば、図1のAx,By,Cz)に基づいて、合成画像形成部215にて合成画像を形成する。このようにして形成される画像は、パターンの製造条件やパターン条件(配置,形状等)、及びSEMの画像取得条件が一致した画像であるため、複数の画像形成条件が合致した高精度な擬似画像を形成することができる。
【0043】
また、画像合成に際しては各登録画像の一部を重畳させて画像形成を行うようにしても良い。重畳領域を設け、その間でパターンマッチング処理等の位置合わせを行うことによって、高精度な位置合わせを行うことが可能となる。パターンマッチングを行う場合には、エッジ同士が重なるような処理を行うようにする。このように重畳領域を設けるために、ステップ103にて実施されたパターン分解による分解領域の大きさを、ライブラリに記憶される登録画像より小さくすると良い。また、登録画像の回転機能を設けることによって、登録に要する画像の数を減らすことができ、ライブラリの簡素化を実現することができる。例えば、図12の例では、登録画像1202と登録画像1203は同じものであり、一方の画像を180度回転することによって、他方の画像を得ることができる。この場合、合成画像選択部215では、設計データからパターンの各片の線分情報を抽出して、その情報に基づいて回転処理を行う。なお、図7に例示するように、単に登録画像と分解された画像を置換する(ステップ706)ようにしても良い。図7に例示するフローチャートのステップ701〜705、及び707は、図1のステップ101〜105、及び107と同じものである。
【0044】
以上のようにして形成された合成画像を、メモリ208等の記憶媒体に登録(ステップ107)して処理を終了する。形成された合成画像は、マッチング処理部209におけるテンプレートマッチングのテンプレートとして用いることができる。以上のような工程を経てテンプレートを形成することによって、既存の登録画像を利用して、SEMを稼働することなくSEM画像に近いテンプレートを作成することができる。
【実施例2】
【0045】
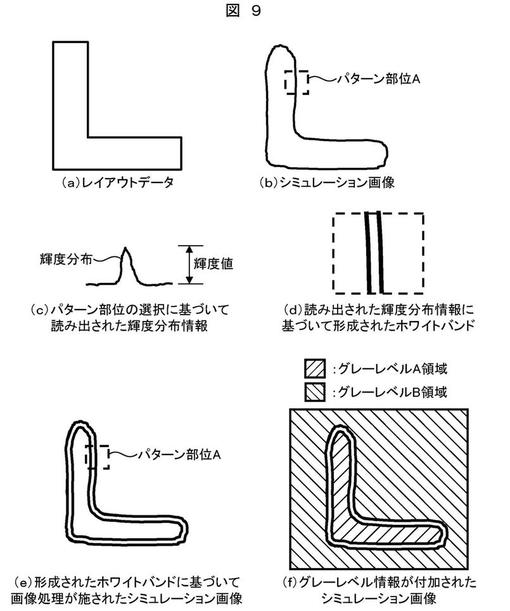
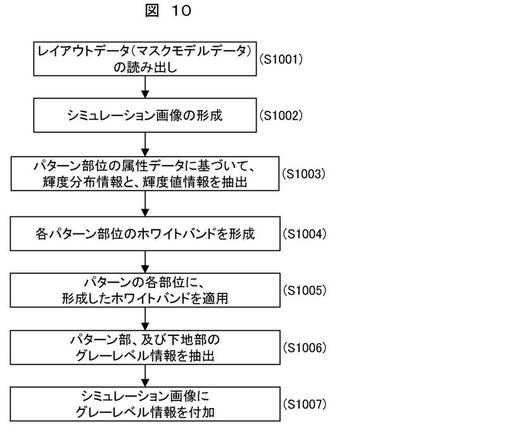
次に、画像を登録しておくのではなく、画像処理によって擬似画像を形成する例を説明する。図9は画像処理に基づいて擬似画像を形成する工程を示す図であり、図10はそのフローチャートである。まず、レイアウトデータを設計データ記憶媒体218から読み出し(ステップ1001)て、シミュレーター220を用いた露光シミュレーションを実施する(ステップ1002)。シミュレーションによって得られたシミュレーション画像をレイアウトデータ分解部212にて分解した後、各分解領域の属性データに応じて、ライブラリより輝度分布情報と輝度値情報を抽出する(ステップ1003)。なお、本例では説明を簡単にするために、パターン部位A(分解領域の1つ)についてのみ説明する。
【0046】
図6は、本例にて採用するライブラリの一例を示す図である。図5に例示したライブラリと異なるのは、パターンの種類に関連付けて記憶されているデータが、登録画像ではなく、パターンエッジの輝度値(brightness),エッジ部分の輝度分布(distribution)を示す近似関数(approximate function)、エッジ部以外のパターン部分と背景(下地)の輝度値(gray level 1,gray level 2)のような画像の特徴情報である点である。このような特徴情報に基づいて、レイアウトデータ、或いはシミュレーション画像の画像を加工し、擬似画像を形成する。パターン部位Aの属性情報は、パターンの種類(形状,配置),製造条件,SEM画像形成条件であり、当該情報と関連付けて記憶されている輝度値と輝度分布情報に基づいて、エッジ部分(ホワイトバンド)の輝度値を調整する(ステップ1004)。もとのレイアウトデータやシミュレーション画像は、パターンの輪郭を示す線分情報であるため、例えば当該線分の垂直方向に幅を持たせるように、各画素の輝度調整を行う(ステップ1005)。次にライブラリより、パターン部、及び下地部のグレーレベル情報を読み出し(ステップ1006)、シミュレーション画像にグレーレベル情報を付加する(ステップ1007)。以上のような各画素の輝度調整は、上記読み出された情報に基づいて、画像輝度調整部214にて実行する。
【0047】
以上のような工程を経て形成される画像は、SEM画像と同様のホワイトバンドと、パターン部、背景部の輝度情報を持った画像となる。図6に例示するように特徴量を選択的に抽出したライブラリによれば、画像情報を登録する場合に比べて、ライブラリのデータ量を減らすことができる。但し、登録画像の合成画像の方が実際のSEM画像に近い画像であるため、画像の出来栄えを優先する場合には登録画像に基づく合成画像形成を行うことが望ましい。
【0048】
以上のようにして形成された画像をテンプレートとして記憶媒体に記憶して、合成画像形成工程を終了する。
【実施例3】
【0049】
これまでの説明は、合成画像(擬似画像)をテンプレートとして登録する例に関するものであったが、以下の説明では、擬似画像を、既存のテンプレート、或いは新たに作成したテンプレートの検証のための検証画像として用いる例について説明する。即ち、半導体製造における半導体露光用のマスク形状及び露光された半導体転写パターンであるシリコン形状を計測する際に用いる測定レシピの妥当性について検証等を行う装置等に関するものである。このような検証、及び当該検証に基づく測定レシピの修正等を適正に行うことによって、半導体製造工程における生産効率を向上することができる。
【0050】
本例では測定レシピの検証を行うために、予め登録されている測定レシピ内に定義されている測定対象の位置情報と、位置決めを行うためのテンプレート形状を用いて、測定の対象となる設計データ(たとえばGDSデータ)の当該形状の転写シミュレーションを行い、そのパターンを基に予め準備されている類似画像を使用し、擬似画像を生成する画像生成部から出力される画像とレシピで定義されている位置決めを行うためのテンプレート形状とのマッチングを行い、擬似画像に対して測定を擬似的に実行するものである。
【0051】
即ち、先の実施例にて説明した擬似画像をテンプレートマッチングの被探索画像とし、予め登録されているテンプレートを用いたテンプレートマッチングを行うことによって、テンプレートの妥当性を検証する。擬似画像は、SEMによって取得される画像の代わりに形成されるものであり、図2に例示する演算処理装置205は、SEMと同じ処理を実質的に行うエミュレーター(Emulator)として動作する。
【0052】
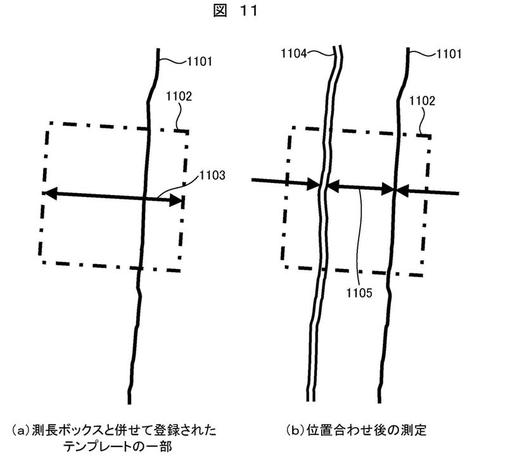
図11は、設計データに基づく線分情報と、SEMエッジ(或いはSEMエッジに基づいて形成される輪郭線)との間の距離を測定するために、線分情報1101と測長ボックス1102が併せて登録されているテンプレートの一部を示す図である。図11の例によれば、測定方向1103も併せてテンプレート情報として登録されている。実際の測定時には線分情報1101を含む図形データからなるテンプレートと、SEM画像(パターン1104)との間でパターンマッチングが実行され、位置合わせが行われた線分間の距離1105を測定することによって測定が行われる。このような測定はEPE(Edge Placement Error)測定と呼ばれ、特にパターンの出来栄えに基づいて、設計データまで遡って対策するというDFM(Design For Manufacturability)という歩留まり向上法にとって重要な測定法である。この測定は設計データに基づく線分、或いはシミュレーション画像の線分を基準とした測定を行う手法であるため、テンプレートはこれらの線分情報を用いて形成される。以下のレシピ検証法は、このように設計データを基準として形成されるテンプレートの検証に特に有効である。
【0053】
設計データに基づいて、シミュレーション等の工程を経て、テンプレートを作成する手法は知られているが、そのテンプレートの検証には、実際にSEMを稼働し、マッチング処理を実際に行う必要があった。本例では擬似画像を利用して、マッチング処理を行うことによって、実際のSEM画像を用いることのない検証を実現する。
【0054】
具体的には、シミュレーション結果から擬似画像を生成し、この擬似画像と測定レシピに定義されている測定のテンプレートとのマッチングを擬似的に行い、計測のエミュレーションを実現する。
【0055】
以上のような検証を実現するための構成は、予め準備されている類似画像を使用しシミュレーションに基づき擬似画像を生成する擬似画像生成部(テンプレート生成部210)と、当該擬似画像とテンプレートとのマッチング処理を実行するマッチング処理部209と、テンプレートが適正に形成されているか否か、或いはその判定を行うのに必要な情報を出力するエミュレーション部211となる。
【0056】
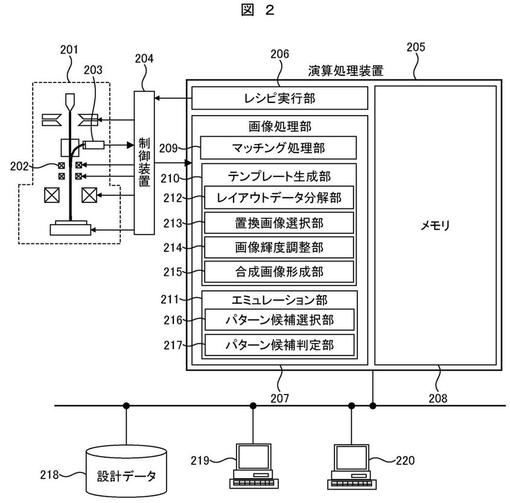
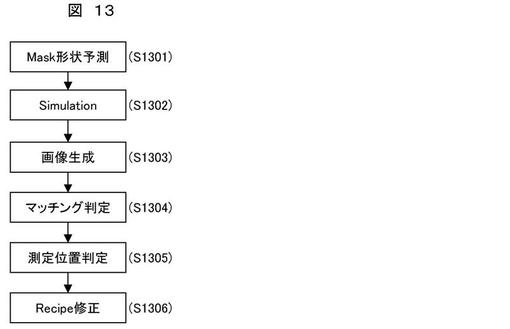
このようなエミュレーターを用いたテンプレートの検証工程は、大まかに図13に例示するとおりになる。また、設計データに基づいて、シミュレーション画像と合成画像(擬似画像)を形成し、両者をマッチングさせる工程を図3に示す。まず、マスク出来ばえのモデルデータに基づくマスク形状予測を実行する(ステップ1301)。次に、設計データに基づいて転写シミュレーションを実施する(ステップ1302)。その次に予め準備されている画像データ群より擬似画像を生成する(ステップ1302)。その次に形成された擬似画像に対してテンプレートを用いたマッチング処理を行う(ステップ1304)。マッチング処理によって位置合わせされた測定位置が適正な位置に位置付けられているか否かの判定(ステップ1305)を行い、必要に応じてレシピの修正を行う(ステップ1306)。測定位置が適正な位置に位置付けられているか否かの判定は、目視での検証を可能とするために、表示画像にマッチング後の重畳画像を表示するようにしても良いし、測長値が明らかに異常な値を示していることを閾値判定にて判定し、その結果を出力するようにしても良い。図13に例示する各工程では以下のような処理が行われる。
【0057】
(A)ステップ1301(マスク出来ばえのモデルデータに基づくマスク形状予測)
擬似画像を生成するための準備として、レシピに定義されている測定座標に対応する設計データ(例えば、GDSデータ(図3(a)))の当該パターンを用いてウェハ転写に用いたマスクレチクルの出来ばえ予測を行う。シミュレーター220ではマスクの製造情報を格納したマスクモデルデータベースを用いてマスクレチクルの製造出来ばえを予測する。
【0058】
マスクモデルデータベースには、(1)マスク描画装置の特性(ビーム形状(○や□)によるマスク出来ばえの影響,電子の強度分布,レジスト中での電子の散乱(前方散乱と後方散乱)等)、(2)エッチング特性(レジスト性能に起因するラフネス特性,現像時のばらつき等)等が記憶されている。
【0059】
形状予測は、例えばマスク製造に用いたマスク描画機の描画特性と、エッチング特性をモデル化したマスクモデルデータベースを用いて、マスク形状のコーナー部の内側や外側の丸みやOPCパターン等の微細な段差の形状を予測するものである。
【0060】
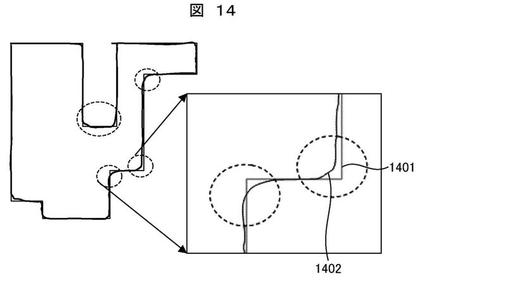
このマスク形状の予測を行うことにより、設計データから転写形状のシミュレーションを直接行う方式にくらべマスクの出来ばえを考慮した高精度な転写形状のシミュレーションが可能となる。図14は、マスク形状と、予測形状(データベースを参照することによって得られる変形形状)との関係を示す図である。直線状に形成されているマスク形状1401に対し、予測形状1402は、描画装置の特性に応じた変形処理が施されている。
【0061】
(B)ステップ1302(設計データに基づく転写シミュレーション)
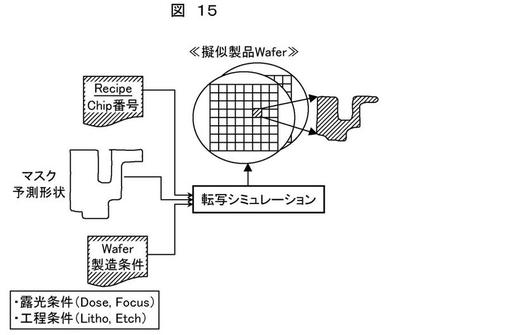
ステップ1301にて作成した測定対象部に対応するマスク予測形状を用いてウェハに転写される形状をシミュレーションする。図15は、転写シミュレーションの概念図である。シミュレーションは、ウェハ製造条件である(I)露光条件(ドーズとフォーカス)と、(II)工程条件としてのLitho(リソ)またはEtch(エッチング)に基づいて行われる。
【0062】
この際、測定レシピにて指定されているウェハ上のそれぞれのチップ(Chip(Die))番号の位置に関してシミュレーションを行いその形状情報をウェハ上のそれぞれの位置に対応付けを行う。
【0063】
これにより、ウェハ面内におけるそれぞれのチップに於ける計測対象のパターンを作成し、後に行う計測のエミュレーションを行うことが可能となる。尚、仮想的なウェハの状態は測定レシピで指定されている、ウェハサイズとチップサイズ及び各チップの配置情報を用いて仮想的に作成する。
【0064】
(C)ステップ1303(擬似画像生成)
次に、計測レシピの実行に際して計測対象となる擬似画像の生成を行う。本実施例では、外部のシミュレーター220等によって得られるシミュレーション画像に基づいて、擬似画像を生成する演算処理装置205(画像処理装置)ついて説明する。擬似画像の生成は前述した転写シミュレーションによって得られた転写予測形状を、SEMで得られる画像として画像化するものであり、転写予測形状と予め多くのSEM画像が蓄積された画像ライブラリを用いてSEM画像を生成するものである。
【0065】
ライブラリは、例えば図5に例示したような画像の撮像条件(SEM condition),試料の製造条件(Process condition)、及び登録画像(Registered image data)が関連付けて記憶されており、このようなライブラリが製造工程ごとに用意されている。一例として実施例1等にて説明したように、ライブラリとの比較を可能とするために、ライブラリとの比較個所毎に分割した設計データ(図3(b))、或いは比較個所毎に分割したシミュレーション画像を作成し、その画像に基づいて合成画像(図3(d))を作成する。
【0066】
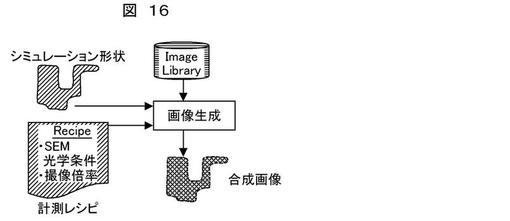
このイメージライブラリの構成は半導体製造工程毎の画像を管理するものであり、画像の撮像条件として、画像取得時の加速電圧,プローブ電流,積算フレーム数等のSEMの電子光学系の条件毎に撮像された画像群を管理するものである。更に、撮像パターンの倍率とパターンサイズ毎に上記のイメージライブラリに登録されている。従って、計測レシピの実行に際してはレシピに記載されている上記のSEMの電子光学系の条件や撮像の倍率に合致する画像を検索し画像合成を行う。図16は、擬似画像形成工程を示す概念図である。
【0067】
画像合成は、レシピに定義されている撮像条件に合致する画像をイメージライブラリより検索し選択する。この際、シミュレーションより得られた計測対象パターンの形状と一致率の高い登録画像の検出を行う。また、この際、パターンの粗密も考慮した類似形状の探索を行う。これらの探索より選択された登録画像を解析し画素単位での輝度値を求めるようにしても良い。
【0068】
また、当該画像のホワイトバンドの幅及び中心となる画素の位置を求め、シミュレーション形状の各画素の位置に輝度情報を構築するようにしても良い。
【0069】
ホワイトバンドの幅や中心位置はパターンの粗密の状況やパターンの形状の特徴量に依存して変化するため、上記で示した計測対象パターンの形状と一致率の高い登録画像を解析し、この情報をシミュレーション形状にマッピングすることにより、高精度な擬似画像を得ることができる。
【0070】
また、半導体の工程毎にパターンのサイズや画像のエッジ位置が異なるため、前述した様にイメージライブラリには工程毎の画像を登録しておく必要がある。
【0071】
尚、イメージライブラリの画像としは測定の運用で実績のある画像が登録されており、半導体の製品デバイス製造でのシリーズ品種等の画像が多数登録されている場合が多い。
製品デバイスの製造に於ける計測は同一形状を計測する場合が多く、測定対象パターンや測定のための位置決めを行うアドレッシングパターン等は既に計測の実績のあるパターンが多いため、上記で説明した同一形状を探索して擬似画像を生成する手法は極めて有効である。
【0072】
(D)ステップ1304(擬似画像を用いたマッチング処理)
計測レシピのエミュレーションを行うためには、上記で述べた擬似画像を用いて実際に計測を行う場合と同一の条件でマッチングを行う(図3(e))。測定を行うためのレシピには測定対象を示す対象パターンと位置決めを行うためのアドレッシングパターンが定義されているが通常、(I)設計データをマッチングパターンとして登録する方式と(II)SEM画像をマッチング様のテンプレートとして登録する2種の方法が用いられている。
【0073】
本エミュレーション手法では上記の2種のデータに対して上記で述べた擬似画像を用いてマッチングを行う。本エミュレーション手法では計測装置に搭載されているマッチングエンジンと同等のアルゴリズムを搭載することで、高精度なエミュレーションを実現することができる。
【0074】
尚、マッチングに際しては測定対象となる計測装置固有の精度情報を参照することでマッチング結果の評価の精度を向上させることができる。
【0075】
即ち、計測装置毎に固有に発生するステージ精度やイメージシフトの精度を装置毎にそれぞれ調整した補正情報を本エミュレーションで参照することで、マッチングの際の位置ずれの許容範囲をこの補正情報を加味して評価することにより、当該計測装置の位置決め精度を見積もることが可能となり、現実的な計測装置の精度の基でマッチング性能を判定することが可能となる。
【0076】
即ち、計測レシピで定義されている座標と画像合成で得られた座標は論理空間(設計データ座標系)で誤差が全く無い状態であり、そのままの状態でマッチングを行うとその成功率は高い傾向を示す場合があり、精度の高いエミュレーションが不可能となる場合がある。このため、上記の座標に対して計測装置毎の精度情報を用いてこの上記の座標に誤差として精度のばらつきを加えて、マッチングを行う。
【0077】
上記エミュレーションによれば以下の効果が期待できる。まず、OPCモデリングのためのレシピの事前検証が可能となる。OPCモデリングのための測定レシピは規則的な繰り返しパターンを大量に計測するため、実測する前に本エミュレーション装置でレシピの検証を行うことで自動運転が可能となり、装置稼働率を向上させることができる。
【0078】
次に、FEMウェハ計測時の測定成功率を向上することができる。露光装置のDose,Focus条件をウェハ面内で変更したいわゆるFEMウェハを計測する場合、ウェハ面内での各チップ(ショット)毎の測定対象パターンはそれぞれ変形している。本エミュレーション装置では擬似画像をチップ毎にDose,Focus条件を考慮して生成するため、測長のためのパラメータをチップ毎に調整することが可能となり、測定の成功率を向上させることができる。
【0079】
更に、ウェハが製造される前の段階での測定準備やレシピ検証が可能となる。
【0080】
以下、エミュレーションの具体的な態様を、図面を用いて説明する。エミュレーション処理は、主に図2のエミュレーション部211にて行われる。エミュレーション部211は、計測レシピを実行しその妥当性を検証し、必要に応じて異常の可能性のあるレシピの部分の修正を行うための指示を出力する。また、エミュレーションの副次的効果として転写形状シミュレーションの測定が行えるため、そのシミュレーションのモデルの検証を行うことができる。以下に本装置の主要部について説明する。
【0081】
(A)擬似画像の生成部(テンプレート生成部210)
測定対象となるウェハもしくはマスクレチクルのSEM画像に相当する擬似画像を生成する。擬似画像生成の対象は測定レシピに定義されているすべての測定座標に対して行うものであり、測定の対象となるウェハもしくはマスクレチクルの設計データまたはMDP処理されたマスクデータを用いて転写シミュレーションデータを取得した上で行う。また、この転写シミュレーションはシミュレーター220にて実施し、当該シミュレーション結果に基づいて演算処理装置205での処理を実行する。シミュレーションに際しては、実際のマスクレチクルの製造性を考慮した仕上がり状態を反映させるため、マスク製造工程での製造性を定義したマスクモデルを用いて製造要因を反映したマスク形状を用いた転写シミュレーションを行う。
【0082】
次に上記シミュレーションで求めた予測形状に基づき擬似画像の生成を行う。擬似画像の生成に際しては転写予測形状と予め多くのSEM画像が蓄積された画像ライブラリを用いてSEM画像を生成するものである。ライブラリは例えばメモリ208、或いはその他の演算処理装置205がアクセス可能な記憶媒体に記憶されている。このイメージライブラリの構成は半導体製造工程毎の画像を管理するものであり、画像の撮像条件として、画像取得時の加速電圧,プローブ電流,積算フレーム数等のSEMの電子光学系の条件毎に撮像された画像群を管理するものである。
【0083】
更に、撮像パターンの倍率とパターンサイズ毎に上記のイメージライブラリに登録されている。従って、計測レシピの実行に際してはレシピに記載されている上記のSEMの電子光学系の条件や撮像の倍率に合致する画像を検索し画像合成を行う。
【0084】
画像合成は、レシピに定義されている撮像条件に合致する画像をイメージライブラリより検索し選択する。この際、シミュレーションより得られた計測対象パターンの形状と一致率の高い登録画像の検出を行う。また、この際、パターンの粗密も考慮した類似形状の探索を行う。
【0085】
次に、これらの探索より選択された登録画像を解析し画素単位での輝度値を求め、必要に応じて輝度値の修正を行うようにしても良い。この場合、当該画像のホワイトバンドの幅及び中心となる画素の位置を求め、シミュレーション形状の各画素の位置に輝度情報を構築する。ホワイトバンドの幅や中心位置はパターンの粗密の状況やパターンの形状の特徴量に依存して変化するため、上記で示した計測対象パターンの形状と一致率の高い登録画像を解析し、この情報をシミュレーション形状にマッピングすることにより、高精度な擬似画像を得ることができる。
【0086】
また、半導体の工程毎にパターンのサイズや画像のエッジ位置が異なるため、前述した様にイメージライブラリには工程毎の画像を登録しておく必要がある。
【0087】
尚、イメージライブラリの画像としは測定の運用で実績のある画像が登録されており、半導体の製品デバイス製造でのシリーズ品種等の画像が多数登録されている場合が多い。
【0088】
製品デバイスの製造に於ける計測は同一形状を計測する場合が多く、測定対象パターンや測定のための位置決めを行うアドレッシングパターン等は既に計測の実績のあるパターンが多いため、上記で説明した同一形状を探索して擬似画像を生成する手法は極めて有効である。
【0089】
(B)マッチング処理部(マッチング処理部209)
計測レシピのエミュレーションを行うためには、上記で述べた擬似画像を用いて実際に計測を行う場合と同一の条件でマッチングを行う。測定を行うためのレシピには測定対象を示す対象パターンと位置決めを行うためのアドレッシングパターンが定義されているが通常、(I)設計データをマッチングパターンとして登録する方式と(II)SEM画像をマッチング様のテンプレートとして登録する2種の方法が用いられている。
【0090】
本エミュレーション手法では上記の2種のデータに対して上記で述べた擬似画像を用いてマッチングを行う。
【0091】
本エミュレーション手法では計測装置に搭載されているマッチングエンジンと同等のアルゴリズムを搭載することで、高精度なエミュレーションを実現することができる。
【0092】
尚、マッチングに際しては測定対象となる計測装置固有の精度情報を参照することでマッチング結果の評価の精度を向上させることができる。
【0093】
即ち、計測装置毎に固有に発生するステージ精度やイメージシフトの精度を装置毎にそれぞれ調整した補正情報を本エミュレーションで参照することで、マッチングの際の位置ずれの許容範囲をこの補正情報を加味して評価することにより、当該計測装置の位置決め精度を見積もることが可能となり、現実的な計測装置の精度の基でマッチング性能を判定することが可能となる。
【0094】
即ち、計測レシピで定義されている座標と画像合成で得られた座標は論理空間(設計データ座標系)で誤差が全く無い状態であり、そのままの状態でマッチングを行うとその成功率は高い傾向を示す場合があり、精度の高いエミュレーションが不可能となる。このため、上記の座標に対して計測装置毎の精度情報を用いてこの上記の座標に誤差として精度のばらつきを加えて、マッチングを行う。
【0095】
次にマッチング結果の判定を行い、擬似画像とマッチングテンプレートの間でズレが生じている場合、(I)設計データ上でアドレッシングパターンの再選択、(II)アドレッシングパターン撮像用のオートフォーカスパターンの妥当性の検証、(III)測定対象パターン撮像用のオートフォーカスパターンの妥当性の検証、(IV)マッチングモードの再選択(例えば、繰り返しパターン用やユニークパターン用のマッチングアルゴリズムの切り替え)等を行うことによって、マッチングの成功率を高めることが可能となる。更に必要に応じて擬似画像生成手段により生成した擬似画像をマッチングテンプレートとして用いる様、レシピの変更を行うことも可能である。
【0096】
(C)レシピ設定部(入力装置219)
前述したマッチング処理部にて確定した画像に対して計測レシピで定義されている測定が可能かについて判定を行い、必要に応じてレシピの再設定を行う。具体的にはレシピで指定されている測長位置にて当該画像が測定可能かを判定する。画像処理部207では、レシピにて指定されている測長部位の幅と高を示す領域内に測長対象となる画像のエッジが正しく存在するかの判定を行う。
【0097】
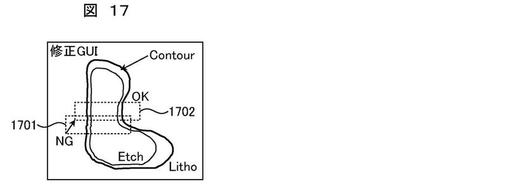
これは、当該画像からその形状を表わす輪郭形状(Contour)を抽出し、測長領域内にエッジが存在するかを判定する。その際、レシピにて指定されている測長の方向に対して直交するエッジ群が十分存在するかを判定する。図17は擬似画像から形成された輪郭線に対し、パターンマッチングによって、測定領域が設定されたテンプレートを重ね合わせたときの輪郭線画像と測定領域の位置関係を示す図である。本例の場合、L字型のパターンのX方向の線幅を測定するための測定領域が設定されているが、測定領域1701に含まれるエッジの内、右側に位置するエッジは、光近接効果により測定方向(X方向)に対して、斜めに形成されている。このような状態で測定を行うと、線幅ではなくパターンのコーナー部分の寸法を含む測定を行ってしまうことになるため、適正な位置に測定位置を修正する必要がある。例えば、正しい位置に配置された測定領域1702に当該領域を再設定する必要がある。
【0098】
パターンのコーナー近くの測定の場合にはパターンの仕上がり予測として曲折した輪郭形状が存在する場合があり、測定の異常もしくは測定が不安定となる可能性があるため、この様な場合には測長領域の位置を補正し、直線のエッジ群を多く含む様にレシピの修正を行う。
【0099】
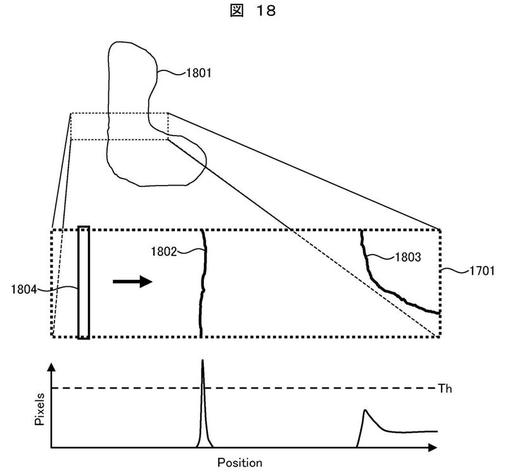
本例では、まず、測定領域に含まれる輪郭線やエッジ情報が目的とする測定にとって適切なものであるか否かを判定する。図18は、測定領域内に含まれるパターン情報が適切なものか否かを判定する判定手法の概念図である。測定領域1701には、輪郭線1801の2つのエッジ(左側エッジ1802,右側エッジ1803)が含まれている。本例において、目的とする測定はX方向の線幅測定であるため、左側エッジ1802、右側エッジ1803のいずれもが、Y方向に沿って形成されている筈である。しかしながら、測定領域がずれていると、右側エッジ1803のように斜めの線分が測定領域の中に含まれることになる。このような状況を判定するために、本例では、測定領域内に含まれる所定の条件を持つ画素をカウントするための評価ウィンドウ1804をX方向に沿って移動させることで、測定領域内のパターンの方向を判定する。
【0100】
具体的には、画像処理部207によって、X方向の位置(Position)に対する検出された画素数(Pixels)の変化をモニターし、所定の画素数を超えた部分のエッジを適正に形成されたエッジとして、所定の画素数以下の部分はエッジがない、或いは適正にエッジが形成されていないと判定する。本例の場合、測定領域が適正な位置に位置付けられていれば、所定値を超えるピークが2つ現われるはずである。もし、所定値を超えるピークの数が2つ以外であった場合、適正な位置に測定領域が設定されていない旨のメッセージ、或いは自動補正を行うための信号を発生する。
【0101】
以上のような構成によれば、レシピの検証を容易に行うことが可能となる。エラーメッセージは、入力装置219に設けられた表示装置やその他の装置の表示装置に表示可能とすることによって、操作者は速やかに入力装置219等を介してレシピ修正を行うことが可能となる。
【0102】
また、上述のような測定領域判定法はあくまでも一例に過ぎず、測定領域内に含まれるパターンがあるべき形状となっているか否かの判定を行うことが可能な画像処理法であれば適用が可能である。例えば測定領域1701用のテンプレートを用意し、所定の一致度以上であれば適正な位置に測定領域が設定されていると判断し、一致度が所定値未満の場合は、誤った位置に測定領域が設定されていると判断するような手法が考えられる。
【0103】
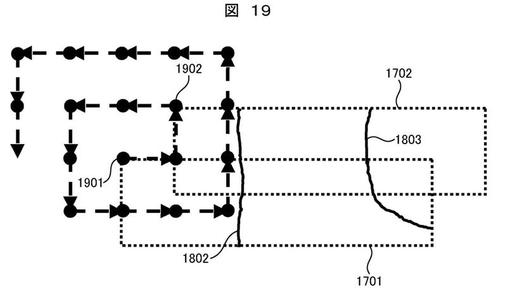
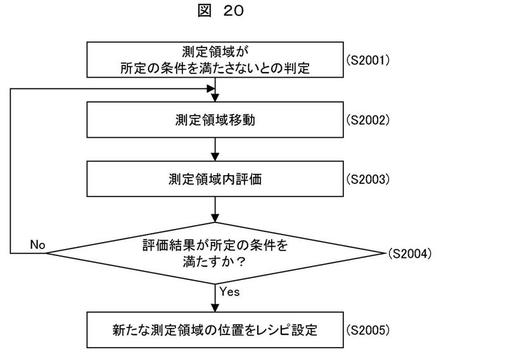
次に、測定領域内に所望の測定個所が含まれていないと判断された場合に、当該測定領域の位置を自動修正する手法について説明する。図19は測定領域を少しずつずらし、適正な測定領域1702を探索する工程を示す図である。図20は、その探索工程を示すフローチャートである。測定領域1701の初期設定位置1901にて、図18に例示するような測定領域内の評価を行い、当該領域が所定の条件を満たさないと判断される場合(ステップ2001)に、画像処理装置207は、矢印の方向に向かって測定領域を移動させ(ステップ2002)、移動先にて同じように、測定領域内の評価を行う(ステップ2003)。本例の場合、渦巻き状に測定領域を移動させ、各移動先にて測定領域の評価を行い、評価結果が所定の条件を満たすか否かの判定を行う(ステップ2004)。所定の条件を満たした場合には、移動を終了し、当該測定領域の位置をレシピに登録する(ステップ2005)。図19は、2点目の移動点1902にて評価結果が所定の条件を満たしたとしてレシピ登録を行った例を示している。
【0104】
以上のような判定手法によればレシピ検証に基づく、レシピの再設定を自動で行うことが可能となる。
【0105】
尚、修正は自動で行う場合と操作者の判断に基づき修正を行う場合があり、本装置の画面上にて図17に示す状況(合成画像と測定領域の重畳表示画像)を表示し、操作者が指示を行うこともできる。
【0106】
また、この結果、妥当となった測長領域に対して測長装置に搭載されている閾値法等の測長アルゴリズムを用いて擬似画像の測長を行い、測長装置の出力形式で測長結果を出力する。
【0107】
以上、本実施例は計測レシピのエミュレーターに係り、計測レシピの妥当性を評価する例について説明したが、擬似画像を転写シミュレーションに基づいて生成することによって、シミュレーションの精度の検証にも用いることができる。即ち、本装置にて測定した測長値と設計データとの差分値または、擬似画像の輪郭線のエッジ位置と設計データの差分値をシミュレーションのためのモデルデータに反映し検証することができる。これにより転写シミュレーションの精度について検証を行うことができる。
【実施例4】
【0108】
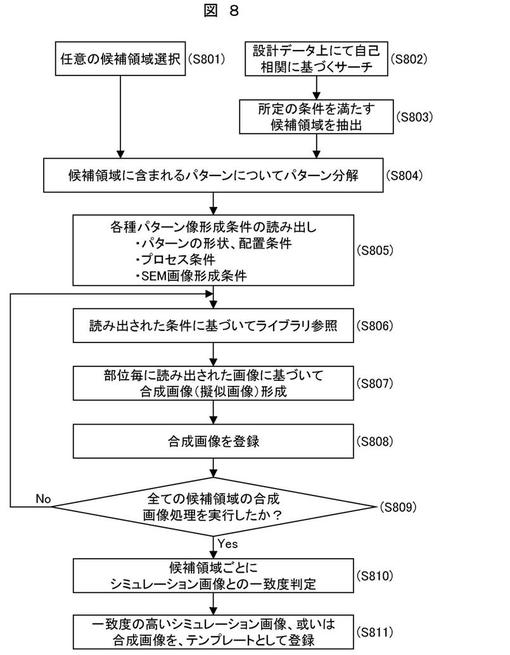
これまで説明してきた実施例では、主にテンプレート作成、及びレシピエミュレーションを行うための装置等について説明したが、以下に設計データ上の1、或いは複数のテンプレート候補の検証、及び選択を行い得る装置等について説明する。図8はその工程を示すフローチャートである。まず、設計データ、或いはシミュレーション画像上にて任意のテンプレート候補領域を選択(ステップ801)、或いは設計データ上にて、候補位置を自動選択する(ステップ802)。
【0109】
テンプレート候補位置の選択は、入力装置219等で行い、自動選択は、パターン候補選択部216によって行われ、例えば設計データの測定領域周囲の複数位置について、自己相関処理に基づいて複数の対象候補を選択する。テンプレートマッチングの被探索領域内に自己相関値が高い個所が複数存在するということは、所望のマッチング位置以外に位置合わせされてしまう可能性が高いことを意味しているため、当該領域を除外して、マッチング位置候補を選択する。また、ステップ803では、ステップ802で抽出されたマッチング位置候補の中から所定の条件を満たす候補領域を抽出する。この候補抽出は、候補領域内にマッチングに適したユニークなパターンが存在する(例えばX方向の線分とY方向の線分の両方が含まれている)か否かの判定を行い、更に、候補を絞り込む。なお、自動で候補を絞り込む場合には、マッチングに適したユニークなパターン形状を選択する他の画像処理アルゴリズムを適用することもできる。
【0110】
以上のようにして選択された1又は複数のマッチング位置候補に含まれるパターンを分解し(ステップ804)、図1のステップ104〜107と同様に、合成画像を形成する(ステップ805〜808)。これを複数の候補について行い、パターン候補判定部217では、シミュレーション画像と合成画像の一致度の高いものを最終的なテンプレートとして登録する(ステップ810,811)。
【0111】
以上のような工程を経てテンプレートを形成することによって、既存の登録画像を利用して、SEMを稼働することなくSEM画像に近いテンプレートを作成することができる。
【符号の説明】
【0112】
201 SEM本体
202 走査偏向器
203 検出器
204 制御装置
205 演算処理装置
206 レシピ実行部
207 画像処理部
208 メモリ
209 マッチング処理部
210 テンプレート生成部
211 エミュレーション部
218 設計データ記憶媒体
219 入力装置
220 シミュレーター
【技術分野】
【0001】
本発明は、試料上に形成されたパターンの寸法測定や検査を行うための画像処理装置、及び荷電粒子線装置に係り、特に、測定装置や検査装置の測定,検査条件の設定を可能とする画像処理装置、及びコンピュータープログラムに関する。
【背景技術】
【0002】
半導体ウェハ上に形成されたパターンを計測,検査する装置では、所望の測定位置に顕微鏡の視野(Field Of View:FOV)を合わせるために、テンプレートマッチング技術が用いられている。テンプレートマッチングとは、予め登録されたテンプレート画像と最も一致する領域を、探索画像から見つけ出す画像処理技術であり、微細なパターンを探し出すための有効な手法として知られている。テンプレートマッチングのためのテンプレートは予め用意しておく必要があるが、このようなテンプレート画像を、設計データ(パターンのレイアウトデータ)のシミュレーション画像から作成する手法が、特許文献1,2に説明されている。レイアウトデータは、パターンの理想形状を示すものであり、半導体プロセスを経て実際に形成されるパターンとは形状等の乖離があるため、一致度判定を高精度に行うことが困難となる場合がある。特許文献1,2は、シミュレーションを施した設計データに基づいて、テンプレートを形成しているため、テンプレートと被探索画像上の対象パターンとの形状差を抑制でき、結果としてマッチングの成功率を高めることができる。
【0003】
一方、特許文献3に開示されているように、レイアウトデータと被探索画像のそれぞれに平滑化処理を施すことによって、両者の形状差を抑制する手法が説明されている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2000−236007号公報
【特許文献2】USP7,457,736
【特許文献3】特開2002−328015号公報(対応米国特許USP7,235,782)
【発明の概要】
【発明が解決しようとする課題】
【0005】
半導体プロセスを経て形成されるパターンは、パターンのエッジ部分に広がりを持ち、ある程度の幅をもって形成されている。走査電子顕微鏡(Scanning Electron Microscope:SEM)等の荷電粒子線装置は、試料へのビーム走査に基づいて得られる二次電子等を検出することによって画像を形成する装置であるが、ビームの入射方向に対して、垂直な面を持つ部分よりも、傾斜面を持つ部分の方がより多く二次電子を発生し、当該部分は相対的に輝度が高くなる。レイアウトデータは二次元的な図形形状でしかないが、実際に半導体プロセスを経て形成されるパターンは、或る程度の高さを持ち、またそのエッジ部分は傾斜しているため、エッジ効果によって、レイアウトデータにはない広がりをもってエッジが表現される。
【0006】
特許文献1,2に開示のテンプレート作成法では、このようなエッジ効果が強く影響する部分やSEM画像固有の画像情報を十分に表現することができないため、テンプレートマッチングの高精度化には限度がある。また、特許文献3に開示された画像処理によってもある程度、両者の差異を圧縮することができるが、やはりレイアウトデータにSEM画像に関する情報は含まれていないため、テンプレートマッチングの高精度化には限度がある。
【0007】
以下に、設計データ、或いはシミュレーション画像に基づいて、実画像に近いパターンを形成することを目的とする画像処理装置、及びコンピュータープログラムについて説明する。
【課題を解決するための手段】
【0008】
上記目的を達成するための一態様として、半導体素子の設計データに基づいて、荷電粒子線装置の動作条件を設定する画像処理部を備えた画像処理装置、或いは当該処理をコンピューターに実行させるコンピュータープログラムであって、当該画像処理部は、荷電粒子線装置の装置条件情報,パターンの種類、及びパターンの部位毎のパターン情報の複数の組み合わせを記憶するライブラリにアクセス可能に構成され、前記装置条件、及びパターンの種類の選択に基づいて、前記パターンの部位毎のパターン情報を用いた各部位の合成画像を形成する合成画像形成部を備えた画像処理装置、或いはコンピュータープログラムを提案する。
【発明の効果】
【0009】
上記一態様によれば、荷電粒子線装置による画像取得を行う前に、荷電粒子線装置にて取得した画像に近似した画像を形成することができる。このような構成によれば、例えば、荷電粒子線装置を動作させることなく、テンプレートマッチング用のテンプレートの作成や、テンプレートの検証のための参照画像の作成を容易に実現することが可能となる。
【図面の簡単な説明】
【0010】
【図1】ライブラリの参照に基づいて合成画像(擬似画像)を形成する工程を示すフローチャート。
【図2】半導体測定(或いは検査)システムの一例を示す図。
【図3】シミュレーション画像と合成画像とのマッチング処理工程を示す図。
【図4】ライブラリに登録されるパターンの部位ごとの登録画像の例を示す図。
【図5】パターンの種類,電子顕微鏡の装置条件、及び登録画像が関連付けて記憶されたライブラリの一例を示す図。
【図6】パターンの種類,電子顕微鏡の装置条件、及びエッジ調整情報が関連付けて記憶されたライブラリの一例を示す図。
【図7】ライブラリの参照に基づいて合成画像(擬似画像)を形成する工程を示すフローチャート。
【図8】シミュレーション画像と合成画像との比較に基づいて、マッチング用のテンプレートを選択する工程を示すフローチャート。
【図9】登録されたエッジ調整情報と、グレーレベル情報に基づいて、合成画像を形成する工程を示す図。
【図10】登録されたエッジ調整情報と、グレーレベル情報に基づいて、合成画像を形成する工程を示すフローチャート。
【図11】シミュレーション画像に関連付けて記憶された測長部位について測長を実行する例を示す図。
【図12】合成画像の形成例を示す図。
【図13】エミュレーターを用いたレシピの検証工程を示すフローチャート。
【図14】マスク形状と、予測形状との関係を示す図。
【図15】マスクの予測形状に基づく転写シミュレーションの概念図。
【図16】擬似画像形成工程を示す概念図。
【図17】輪郭線画像と測定領域の位置関係を示す図。
【図18】測定領域内に含まれるパターン情報の判定法を示す図。
【図19】測定領域の探索工程を示す図。
【図20】測定領域の探索工程を示すフローチャート。
【発明を実施するための形態】
【0011】
以下に説明する実施例は、半導体製造における半導体露光用のマスク形状及び露光された半導体転写パターンであるシリコン形状を計測する際に用いる測定レシピの作成、或いは測定レシピの妥当性について検証及び補正を行う装置、コンピューターにこれらの処理を実行させるコンピュータープログラム、及び当該コンピュータープログラムを読み取り可能な記憶媒体に関するものであり、半導体製造工程における生産効率を向上させるためのものである。
【0012】
半導体デバイス製造に於ける微細化技術の進展により、製造パターンの微細化は目覚しく、半導体生産における検査・計測において高倍率計測が必要となっている。
【0013】
この高倍率計測の結果、撮像するマスク形状及び半導体転写パターンのSEM画像のホワイトバンドの明瞭さが不安定となり、所望の位置の画像の撮像やエッジ検出が困難となってきており、この結果、測定レシピを用いた自動測定での不良を引き起こす要因となり、生産の効率を低下させることとなる。
【0014】
一方、半導体の多様化による生産における品種数の増大に伴い計測に使用する自動測定のレシピ数も増加し、計測に使用するレシピの運用コストの増大化問題となっている。
【0015】
また、微細化を進めるに当たり、露光技術で使用する光源の波長の限界により超解像度技術(RET)によるOPC(Optical Proximity Correction)の高度化が必須となりこのOPCの高精度化の要求が一般的となっており、この高精度化のための補正情報として1次元形状に加え、膨大な量の2次元形状の計測が必須となっている。
【0016】
更に微細化により転写におけるパターン形状の余裕度が少なくなっており、製品デバイス製造における危険箇所(Hotspot)の管理が歩留まり維持・向上のために必要となってきており、インラインモニターとして2次元の危険箇所の定常的な計測が重要であり、そのための自動測定用の計測レシピの完成度が重要となってきている。
【0017】
以下に説明する実施例では、上記半導体測定における状況に鑑み、測定レシピを容易に作成する装置等について説明する。より具体的には、半導体製造に用いる半導体露光用のマスク形状及び露光された半導体転写パターンであるシリコン形状を計測する際に用いる測定レシピの作成、或いは妥当性の検証を、計測装置(例えば、CD−SEM(Critical Dimension-Scanning Electron Microscope))を使用する事無く行う装置等について、説明する。測定レシピの検証については、計測対象のマスクまたはウェハ上に形成されたパターン画像のエミュレーションを行い、擬似的に測定レシピを実行しその妥当性を検証することによって、測定レシピへの適当な修正を可能とするものである。これにより半導体製造工程におけるレシピ運用の効率化を図るものである。
【0018】
図2は、SEMを含む測定、或いは検査システムの詳細説明図である。本システムには、SEM本体201、当該SEM本体の制御装置203、及び演算処理装置205が含まれている。演算処理装置205には、制御装置203に所定の制御信号を供給するレシピ実行部206と、走査偏向器202の走査と同期して検出器203によって得られた検出信号を配列することによって得られる画像の画像処理を行う画像処理部207、及び取得された画像情報や、レシピ実行部206にて実行するレシピ情報を記憶するメモリ208が内蔵されている。測定レシピは、SEMを自動的に動作させるための動作プログラムであり、測定対象となる試料の種類ごとに、上記メモリ208や外部の記憶媒体に記憶され、必要に応じて読み出される。
【0019】
試料から放出された電子は、検出器203にて捕捉され、制御装置204に内蔵されたA/D変換器でデジタル信号に変換される。画像処理部207に内蔵されるCPU,ASIC,FPGA等の画像処理ハードウェアによって、目的に応じた画像処理が行われる。また、画像処理部207は、検出信号に基づいて、ラインプロファイルを作成し、プロファイルのピーク間の寸法を測定する機能をも備えている。
【0020】
更に演算処理装置205は、入力手段を備えた入力装置219と接続され、当該入力装置219に設けられた表示装置に、操作者に対して画像や検査結果等を表示するGUI(Graphcal User Interface)等の機能を有する。
【0021】
なお、演算処理装置205における制御や処理の一部又は全てを、CPUや画像の蓄積が可能なメモリを搭載した電子計算機等に割り振って処理・制御することも可能である。また、入力装置219は、検査等に必要とされる電子デバイスの座標,位置決めに利用するパターンマッチング用のテンプレート,撮影条件等を含む撮像レシピを手動もしくは、電子デバイスの設計データ記憶媒体218に記憶された設計データを活用して作成する撮像レシピ作成装置としても機能する。
【0022】
入力装置219は、設計データに基づいて形成される線図画像の一部を切り出して、テンプレートとするテンプレート作成部を備えており、作成されたテンプレートは画像処理部207に内蔵されるマッチング処理部209におけるテンプレートマッチングのテンプレートとして、メモリ208に登録される。テンプレートマッチングは、位置合わせの対象となる撮像画像と、テンプレートが一致する個所を、正規化相関法等を用いた一致度判定に基づいて特定する手法であり、マッチング処理部209は、一致度判定に基づいて、撮像画像の所望の位置を特定する。なお、本実施例では、テンプレートと画像との一致の度合いを一致度や類似度という言葉で表現するが、両者の一致の程度を示す指標という意味では同じものである。また、不一致度や非類似度も一致度や類似度の一態様である。
【0023】
以下に説明する実施例は、主に設計データに基づいて得られるエッジ情報と、SEM等によって撮像された撮像画像間との間のパターンマッチングに関するものであり、設計データに基づいて得られるエッジ情報は、設計データに基づいて形成されるパターンの理想形状を示す線分画像情報や、シミュレーター220によって、実パターンに近くなるような変形処理が施された線分画像情報である。また、設計データは例えばGDSフォーマットやOASISフォーマットなどで表現されており、所定の形式にて記憶されている。なお、設計データは、設計データを表示するソフトウェアがそのフォーマット形式を表示でき、図形データとして取り扱うことができれば、その種類は問わない。
【0024】
なお、以下に説明する実施例では、SEMに搭載された制御装置、或いはSEMに通信回線等を経由して接続される演算処理装置205にてマッチング処理を実行する例を説明するが、これに限られることはなく、コンピュータープログラムによって、画像処理を実行する汎用の演算装置を用いて、後述するような処理を行うようにしても良い。更に、集束イオンビーム(Focused Ion beam:FIB)装置等、他の荷電粒子線装置に対しても、後述する手法の適用が可能である。
【0025】
本実施例は、パターンマッチングを行う装置、パターンマッチングをコンピューターに実行させるプログラム、及び当該プログラムを記憶する記憶媒体に関するものである。
【実施例1】
【0026】
前述したように半導体の製造過程における計測の自動運転は生産工程全般における効率化のなかで重要な役割を占めている。しかし、計測レシピによる計測の自動運転は以下に示す要因により自動化率向上の妨げとなっている。
【0027】
半導体製造では対象パターンを転写するために設計データを基にして作成されたマスクレチクルを用いて露光装置によりシリコンウェハ上にパターン形状を形成する。また、エッチング工程においては対象パターン上のエッチングにより除去し所望のパターンを形成する。
【0028】
ウェハパターン形成では、上記の半導体製造工程の様々な変動要因により計測の対象となるパターン寸法が変動し、設計データに対応した理想的な所望のパターン形状として形成されていない場合が多く、特にエッチング工程でのパターン形状はその乖離が大きい場合がある。
【0029】
また、露光に使用するマスクレチクルの製造に於いては、マスク描画のための電子ビーム露光時の誤差やマスク製造におけるエッチングのバラつき等により、設計データに対応した理想的マスク形状が作成さてれていない場合があり、その結果、当該マスクレチクルを使用して露光を行った転写パターンの形状が変動している場合がある。
【0030】
さらに計測においては計測に使用する測定装置毎の機差要因(たとえばステージ座標精度のばらつきや電子ビームシフト精度のばらつき)により計測機毎に測定位置のずれが生じる可能性がある。また、測定レシピにおいて計測のための位置決めを行うパターンの形状ユニーク性の問題により位置決めの正確性が低くなり、所望の位置精度でパターンの計測ができない場合がある。
【0031】
また、プロセスマージンを検証する等の目的で露光装置のドーズやフォーカス条件をウェハ面内で順次変更したウェハ(FEM(Focus Exposure Matrix)ウェハ)の計測では各条件にてパターンの形状が異なったものとなり、計測においてエラーとなる場合が多い。総括すると、測定エラーの要因は、(1)プロセス変動によるウェハパターンの変形、(2)リソグラフィ工程を経て形成されたパターン形状(露光結果)と、エッチング工程を経て形成されたパターン形状との差異、(3)計測装置毎のステージ座標精度のばらつき、(4)計測位置決めのアドレッシングパターンの安定性不足、(5)FEMウェハのように、チップ単位で形状の変化が著しいパターンの存在、が挙げられる。
【0032】
以上のような要因の存在により、撮像の失敗,撮像の失敗に基づく計測部位のずれ、或いは対象パターン以外を計測対象とするという、計測のエラーが発生する。
【0033】
現状、これらの対応として実際のマスクやウェハが製造された後に、これを使用してレシピの実行のテスト(測定パラメータの調整やマッチングテンプレートの差し替え等)を行っており、このためターゲットに対してダメージを与えたり、実際の計測までの時間がかかってしまい、これが製造工程でのボトルネックとなる。本来、自動化の計測レシピはウェハが出来上がるまえに完成してウェハ製造時点でタイムリーに自動計測を行う必要がある。
【0034】
本実施例では、特にウェハ等の計測を行う前に、SEM画像に近いパターン画像の形成を行うことが可能な画像処理装置について説明する。図1は、SEM画像を形成する前に、SEM画像に近似する画像を形成する工程を示すフローチャートである。本実施例では特に、設計データに基づいて画像を形成する例について説明する。まず、ステップ101にて、設計データ記憶媒体218より、設計データを読み出し、当該設計データに基づいて、シミュレーター220等で図形データを作成する(S102)。シミュレーター220では、露光条件等に応じた変形処理に基づいて図形を作成する。また、ここでは単にパターンのレイアウトデータを図形化するだけでも良い。
【0035】
次に、テンプレート生成部210に含まれるレイアウトデータ分解部212にて、形成された図形データを所定の条件に基づいて分解する(ステップ103)。この場合、後述するライブラリに登録された画像に表示された試料領域と同じ大きさ(同じ視野(Field Of View:FOV)サイズ)となる大きさ単位で領域分割を行う。例えば図1に例示するL字型のパターンの場合、領域A〜Cの3つの領域に分割する。
【0036】
次に、領域A,B,Cに相当する領域のパターン形状,配置条件,パターンの製造条件,SEMの画像形成条件(ビーム条件)の読み出しを行う(ステップ104)。このような読み出しは、パターン形状や配置条件については、もとの設計データに予め登録された情報であるため、領域選択に基づいて自動的に読み出しが行われるようにしても良いし、入力装置219からの任意の入力を可能とするようにしても良い。また、製造条件は設計データに登録されている場合には、設計データから読み出すようにしても良いし、入力装置219からの任意の入力を可能とするようにしても良い。
【0037】
SEM画像形成条件については、通常、設計データに登録されているものではないため、別途の設定を行う必要があるが、例えば何等かのデフォルト情報がある場合には、その情報を読み出すようにしても良い。
【0038】
なお、パターンの配置の疎密によって、光近接効果(Optical Proximity Effect:OPE)によるパターンの形状の変化の程度が変わるため、パターンの形状だけではなく、配置条件(疎密の程度)も設定条件として加えることが望ましい。具体的には、対象パターンに最も近接するパターンと対象パターンとの距離や近接するパターンの大きさ等毎に、パターンの種類を分けておくようにすると良い。また、パターン形状の変動要因が他に存在する場合は、その変動要因ごとにパターンの種類を分類するようにしても良い。
【0039】
ステップ105では、読み出されたパターン像形成条件に基づいて、ライブラリを参照する。ライブラリとは、例えば図5に例示するように、パターンの種類(Pattern:パターン形状,配置条件,材質等),プロセス条件(Process condition:露光装置等のフォーカスやドーズ量)、及びSEM画像形成条件(SEM condition:電子顕微鏡のFOVサイズ,加速電圧,フレーム数,ビーム電流,ビームの到達エネルギー等)と、登録画像(Registered image data)が関連付けて記憶されているデータベースである。なお、この組み合わせは一例に過ぎず、SEM画像形成条件を含むパターンの見え方を大きく左右する情報を選択的に用いて、ライブラリを構築するようにしても良い。
【0040】
登録画像は、異なる試料や測定工程にて取得した画像を予め各条件の組み合わせに応じて分類して蓄積しておく。図4は、登録画像の例を示す図である。パターン形状は、基本的に直線部とコーナー部からなる幾何学形状であるため、例えば図4の(a)〜(c)のように、直線部と角部(コーナー)の3つのパターン分類を用意すれば、図12に例示するような組み合わせを行うことによって、合成画像を形成することができる。本例にて、パターンの部位毎に画像を分割して登録している理由は、ライブラリを単純化することによるデータ量削減のためであるが、必要に応じて、より複雑な形状をライブラリに登録するようにしても良い。そのパターン形状の類型としては、図4(d)に例示するような孤立パターン、図4(e)に例示するようなラインエンド、図4(f)に例示するようなコーナー、図4(g)に例示するようなライン等が考えられる。孤立パターンは、例えば図4(b)のコーナーの4つの合成像である。このようにパターンの形成状態や繁用するパターン形状等の状況に応じて、登録画像の形状を選択に基づいてライブラリを構築するようにしても良い。
【0041】
なお、ステップ105では、選択されたパターン形成条件と同じ条件、或いは選択されたパターン形成条件と同じとみなせる条件と関連付けて記憶された登録画像を読み出す。なお、ライブラリは、1のパターン種類に対し、複数の登録画像を登録可能とすると共に、測定時に取得された画像を、複数の画像領域に分割すると共に、その際のパターン像形成条件と関連して登録可能とすることによって、測定時のライブラリのアップデートを行うようにして構築すると良い。
【0042】
ステップ106では、置換画像選択部213によって選択された登録画像(例えば、図1のAx,By,Cz)に基づいて、合成画像形成部215にて合成画像を形成する。このようにして形成される画像は、パターンの製造条件やパターン条件(配置,形状等)、及びSEMの画像取得条件が一致した画像であるため、複数の画像形成条件が合致した高精度な擬似画像を形成することができる。
【0043】
また、画像合成に際しては各登録画像の一部を重畳させて画像形成を行うようにしても良い。重畳領域を設け、その間でパターンマッチング処理等の位置合わせを行うことによって、高精度な位置合わせを行うことが可能となる。パターンマッチングを行う場合には、エッジ同士が重なるような処理を行うようにする。このように重畳領域を設けるために、ステップ103にて実施されたパターン分解による分解領域の大きさを、ライブラリに記憶される登録画像より小さくすると良い。また、登録画像の回転機能を設けることによって、登録に要する画像の数を減らすことができ、ライブラリの簡素化を実現することができる。例えば、図12の例では、登録画像1202と登録画像1203は同じものであり、一方の画像を180度回転することによって、他方の画像を得ることができる。この場合、合成画像選択部215では、設計データからパターンの各片の線分情報を抽出して、その情報に基づいて回転処理を行う。なお、図7に例示するように、単に登録画像と分解された画像を置換する(ステップ706)ようにしても良い。図7に例示するフローチャートのステップ701〜705、及び707は、図1のステップ101〜105、及び107と同じものである。
【0044】
以上のようにして形成された合成画像を、メモリ208等の記憶媒体に登録(ステップ107)して処理を終了する。形成された合成画像は、マッチング処理部209におけるテンプレートマッチングのテンプレートとして用いることができる。以上のような工程を経てテンプレートを形成することによって、既存の登録画像を利用して、SEMを稼働することなくSEM画像に近いテンプレートを作成することができる。
【実施例2】
【0045】
次に、画像を登録しておくのではなく、画像処理によって擬似画像を形成する例を説明する。図9は画像処理に基づいて擬似画像を形成する工程を示す図であり、図10はそのフローチャートである。まず、レイアウトデータを設計データ記憶媒体218から読み出し(ステップ1001)て、シミュレーター220を用いた露光シミュレーションを実施する(ステップ1002)。シミュレーションによって得られたシミュレーション画像をレイアウトデータ分解部212にて分解した後、各分解領域の属性データに応じて、ライブラリより輝度分布情報と輝度値情報を抽出する(ステップ1003)。なお、本例では説明を簡単にするために、パターン部位A(分解領域の1つ)についてのみ説明する。
【0046】
図6は、本例にて採用するライブラリの一例を示す図である。図5に例示したライブラリと異なるのは、パターンの種類に関連付けて記憶されているデータが、登録画像ではなく、パターンエッジの輝度値(brightness),エッジ部分の輝度分布(distribution)を示す近似関数(approximate function)、エッジ部以外のパターン部分と背景(下地)の輝度値(gray level 1,gray level 2)のような画像の特徴情報である点である。このような特徴情報に基づいて、レイアウトデータ、或いはシミュレーション画像の画像を加工し、擬似画像を形成する。パターン部位Aの属性情報は、パターンの種類(形状,配置),製造条件,SEM画像形成条件であり、当該情報と関連付けて記憶されている輝度値と輝度分布情報に基づいて、エッジ部分(ホワイトバンド)の輝度値を調整する(ステップ1004)。もとのレイアウトデータやシミュレーション画像は、パターンの輪郭を示す線分情報であるため、例えば当該線分の垂直方向に幅を持たせるように、各画素の輝度調整を行う(ステップ1005)。次にライブラリより、パターン部、及び下地部のグレーレベル情報を読み出し(ステップ1006)、シミュレーション画像にグレーレベル情報を付加する(ステップ1007)。以上のような各画素の輝度調整は、上記読み出された情報に基づいて、画像輝度調整部214にて実行する。
【0047】
以上のような工程を経て形成される画像は、SEM画像と同様のホワイトバンドと、パターン部、背景部の輝度情報を持った画像となる。図6に例示するように特徴量を選択的に抽出したライブラリによれば、画像情報を登録する場合に比べて、ライブラリのデータ量を減らすことができる。但し、登録画像の合成画像の方が実際のSEM画像に近い画像であるため、画像の出来栄えを優先する場合には登録画像に基づく合成画像形成を行うことが望ましい。
【0048】
以上のようにして形成された画像をテンプレートとして記憶媒体に記憶して、合成画像形成工程を終了する。
【実施例3】
【0049】
これまでの説明は、合成画像(擬似画像)をテンプレートとして登録する例に関するものであったが、以下の説明では、擬似画像を、既存のテンプレート、或いは新たに作成したテンプレートの検証のための検証画像として用いる例について説明する。即ち、半導体製造における半導体露光用のマスク形状及び露光された半導体転写パターンであるシリコン形状を計測する際に用いる測定レシピの妥当性について検証等を行う装置等に関するものである。このような検証、及び当該検証に基づく測定レシピの修正等を適正に行うことによって、半導体製造工程における生産効率を向上することができる。
【0050】
本例では測定レシピの検証を行うために、予め登録されている測定レシピ内に定義されている測定対象の位置情報と、位置決めを行うためのテンプレート形状を用いて、測定の対象となる設計データ(たとえばGDSデータ)の当該形状の転写シミュレーションを行い、そのパターンを基に予め準備されている類似画像を使用し、擬似画像を生成する画像生成部から出力される画像とレシピで定義されている位置決めを行うためのテンプレート形状とのマッチングを行い、擬似画像に対して測定を擬似的に実行するものである。
【0051】
即ち、先の実施例にて説明した擬似画像をテンプレートマッチングの被探索画像とし、予め登録されているテンプレートを用いたテンプレートマッチングを行うことによって、テンプレートの妥当性を検証する。擬似画像は、SEMによって取得される画像の代わりに形成されるものであり、図2に例示する演算処理装置205は、SEMと同じ処理を実質的に行うエミュレーター(Emulator)として動作する。
【0052】
図11は、設計データに基づく線分情報と、SEMエッジ(或いはSEMエッジに基づいて形成される輪郭線)との間の距離を測定するために、線分情報1101と測長ボックス1102が併せて登録されているテンプレートの一部を示す図である。図11の例によれば、測定方向1103も併せてテンプレート情報として登録されている。実際の測定時には線分情報1101を含む図形データからなるテンプレートと、SEM画像(パターン1104)との間でパターンマッチングが実行され、位置合わせが行われた線分間の距離1105を測定することによって測定が行われる。このような測定はEPE(Edge Placement Error)測定と呼ばれ、特にパターンの出来栄えに基づいて、設計データまで遡って対策するというDFM(Design For Manufacturability)という歩留まり向上法にとって重要な測定法である。この測定は設計データに基づく線分、或いはシミュレーション画像の線分を基準とした測定を行う手法であるため、テンプレートはこれらの線分情報を用いて形成される。以下のレシピ検証法は、このように設計データを基準として形成されるテンプレートの検証に特に有効である。
【0053】
設計データに基づいて、シミュレーション等の工程を経て、テンプレートを作成する手法は知られているが、そのテンプレートの検証には、実際にSEMを稼働し、マッチング処理を実際に行う必要があった。本例では擬似画像を利用して、マッチング処理を行うことによって、実際のSEM画像を用いることのない検証を実現する。
【0054】
具体的には、シミュレーション結果から擬似画像を生成し、この擬似画像と測定レシピに定義されている測定のテンプレートとのマッチングを擬似的に行い、計測のエミュレーションを実現する。
【0055】
以上のような検証を実現するための構成は、予め準備されている類似画像を使用しシミュレーションに基づき擬似画像を生成する擬似画像生成部(テンプレート生成部210)と、当該擬似画像とテンプレートとのマッチング処理を実行するマッチング処理部209と、テンプレートが適正に形成されているか否か、或いはその判定を行うのに必要な情報を出力するエミュレーション部211となる。
【0056】
このようなエミュレーターを用いたテンプレートの検証工程は、大まかに図13に例示するとおりになる。また、設計データに基づいて、シミュレーション画像と合成画像(擬似画像)を形成し、両者をマッチングさせる工程を図3に示す。まず、マスク出来ばえのモデルデータに基づくマスク形状予測を実行する(ステップ1301)。次に、設計データに基づいて転写シミュレーションを実施する(ステップ1302)。その次に予め準備されている画像データ群より擬似画像を生成する(ステップ1302)。その次に形成された擬似画像に対してテンプレートを用いたマッチング処理を行う(ステップ1304)。マッチング処理によって位置合わせされた測定位置が適正な位置に位置付けられているか否かの判定(ステップ1305)を行い、必要に応じてレシピの修正を行う(ステップ1306)。測定位置が適正な位置に位置付けられているか否かの判定は、目視での検証を可能とするために、表示画像にマッチング後の重畳画像を表示するようにしても良いし、測長値が明らかに異常な値を示していることを閾値判定にて判定し、その結果を出力するようにしても良い。図13に例示する各工程では以下のような処理が行われる。
【0057】
(A)ステップ1301(マスク出来ばえのモデルデータに基づくマスク形状予測)
擬似画像を生成するための準備として、レシピに定義されている測定座標に対応する設計データ(例えば、GDSデータ(図3(a)))の当該パターンを用いてウェハ転写に用いたマスクレチクルの出来ばえ予測を行う。シミュレーター220ではマスクの製造情報を格納したマスクモデルデータベースを用いてマスクレチクルの製造出来ばえを予測する。
【0058】
マスクモデルデータベースには、(1)マスク描画装置の特性(ビーム形状(○や□)によるマスク出来ばえの影響,電子の強度分布,レジスト中での電子の散乱(前方散乱と後方散乱)等)、(2)エッチング特性(レジスト性能に起因するラフネス特性,現像時のばらつき等)等が記憶されている。
【0059】
形状予測は、例えばマスク製造に用いたマスク描画機の描画特性と、エッチング特性をモデル化したマスクモデルデータベースを用いて、マスク形状のコーナー部の内側や外側の丸みやOPCパターン等の微細な段差の形状を予測するものである。
【0060】
このマスク形状の予測を行うことにより、設計データから転写形状のシミュレーションを直接行う方式にくらべマスクの出来ばえを考慮した高精度な転写形状のシミュレーションが可能となる。図14は、マスク形状と、予測形状(データベースを参照することによって得られる変形形状)との関係を示す図である。直線状に形成されているマスク形状1401に対し、予測形状1402は、描画装置の特性に応じた変形処理が施されている。
【0061】
(B)ステップ1302(設計データに基づく転写シミュレーション)
ステップ1301にて作成した測定対象部に対応するマスク予測形状を用いてウェハに転写される形状をシミュレーションする。図15は、転写シミュレーションの概念図である。シミュレーションは、ウェハ製造条件である(I)露光条件(ドーズとフォーカス)と、(II)工程条件としてのLitho(リソ)またはEtch(エッチング)に基づいて行われる。
【0062】
この際、測定レシピにて指定されているウェハ上のそれぞれのチップ(Chip(Die))番号の位置に関してシミュレーションを行いその形状情報をウェハ上のそれぞれの位置に対応付けを行う。
【0063】
これにより、ウェハ面内におけるそれぞれのチップに於ける計測対象のパターンを作成し、後に行う計測のエミュレーションを行うことが可能となる。尚、仮想的なウェハの状態は測定レシピで指定されている、ウェハサイズとチップサイズ及び各チップの配置情報を用いて仮想的に作成する。
【0064】
(C)ステップ1303(擬似画像生成)
次に、計測レシピの実行に際して計測対象となる擬似画像の生成を行う。本実施例では、外部のシミュレーター220等によって得られるシミュレーション画像に基づいて、擬似画像を生成する演算処理装置205(画像処理装置)ついて説明する。擬似画像の生成は前述した転写シミュレーションによって得られた転写予測形状を、SEMで得られる画像として画像化するものであり、転写予測形状と予め多くのSEM画像が蓄積された画像ライブラリを用いてSEM画像を生成するものである。
【0065】
ライブラリは、例えば図5に例示したような画像の撮像条件(SEM condition),試料の製造条件(Process condition)、及び登録画像(Registered image data)が関連付けて記憶されており、このようなライブラリが製造工程ごとに用意されている。一例として実施例1等にて説明したように、ライブラリとの比較を可能とするために、ライブラリとの比較個所毎に分割した設計データ(図3(b))、或いは比較個所毎に分割したシミュレーション画像を作成し、その画像に基づいて合成画像(図3(d))を作成する。
【0066】
このイメージライブラリの構成は半導体製造工程毎の画像を管理するものであり、画像の撮像条件として、画像取得時の加速電圧,プローブ電流,積算フレーム数等のSEMの電子光学系の条件毎に撮像された画像群を管理するものである。更に、撮像パターンの倍率とパターンサイズ毎に上記のイメージライブラリに登録されている。従って、計測レシピの実行に際してはレシピに記載されている上記のSEMの電子光学系の条件や撮像の倍率に合致する画像を検索し画像合成を行う。図16は、擬似画像形成工程を示す概念図である。
【0067】
画像合成は、レシピに定義されている撮像条件に合致する画像をイメージライブラリより検索し選択する。この際、シミュレーションより得られた計測対象パターンの形状と一致率の高い登録画像の検出を行う。また、この際、パターンの粗密も考慮した類似形状の探索を行う。これらの探索より選択された登録画像を解析し画素単位での輝度値を求めるようにしても良い。
【0068】
また、当該画像のホワイトバンドの幅及び中心となる画素の位置を求め、シミュレーション形状の各画素の位置に輝度情報を構築するようにしても良い。
【0069】
ホワイトバンドの幅や中心位置はパターンの粗密の状況やパターンの形状の特徴量に依存して変化するため、上記で示した計測対象パターンの形状と一致率の高い登録画像を解析し、この情報をシミュレーション形状にマッピングすることにより、高精度な擬似画像を得ることができる。
【0070】
また、半導体の工程毎にパターンのサイズや画像のエッジ位置が異なるため、前述した様にイメージライブラリには工程毎の画像を登録しておく必要がある。
【0071】
尚、イメージライブラリの画像としは測定の運用で実績のある画像が登録されており、半導体の製品デバイス製造でのシリーズ品種等の画像が多数登録されている場合が多い。
製品デバイスの製造に於ける計測は同一形状を計測する場合が多く、測定対象パターンや測定のための位置決めを行うアドレッシングパターン等は既に計測の実績のあるパターンが多いため、上記で説明した同一形状を探索して擬似画像を生成する手法は極めて有効である。
【0072】
(D)ステップ1304(擬似画像を用いたマッチング処理)
計測レシピのエミュレーションを行うためには、上記で述べた擬似画像を用いて実際に計測を行う場合と同一の条件でマッチングを行う(図3(e))。測定を行うためのレシピには測定対象を示す対象パターンと位置決めを行うためのアドレッシングパターンが定義されているが通常、(I)設計データをマッチングパターンとして登録する方式と(II)SEM画像をマッチング様のテンプレートとして登録する2種の方法が用いられている。
【0073】
本エミュレーション手法では上記の2種のデータに対して上記で述べた擬似画像を用いてマッチングを行う。本エミュレーション手法では計測装置に搭載されているマッチングエンジンと同等のアルゴリズムを搭載することで、高精度なエミュレーションを実現することができる。
【0074】
尚、マッチングに際しては測定対象となる計測装置固有の精度情報を参照することでマッチング結果の評価の精度を向上させることができる。
【0075】
即ち、計測装置毎に固有に発生するステージ精度やイメージシフトの精度を装置毎にそれぞれ調整した補正情報を本エミュレーションで参照することで、マッチングの際の位置ずれの許容範囲をこの補正情報を加味して評価することにより、当該計測装置の位置決め精度を見積もることが可能となり、現実的な計測装置の精度の基でマッチング性能を判定することが可能となる。
【0076】
即ち、計測レシピで定義されている座標と画像合成で得られた座標は論理空間(設計データ座標系)で誤差が全く無い状態であり、そのままの状態でマッチングを行うとその成功率は高い傾向を示す場合があり、精度の高いエミュレーションが不可能となる場合がある。このため、上記の座標に対して計測装置毎の精度情報を用いてこの上記の座標に誤差として精度のばらつきを加えて、マッチングを行う。
【0077】
上記エミュレーションによれば以下の効果が期待できる。まず、OPCモデリングのためのレシピの事前検証が可能となる。OPCモデリングのための測定レシピは規則的な繰り返しパターンを大量に計測するため、実測する前に本エミュレーション装置でレシピの検証を行うことで自動運転が可能となり、装置稼働率を向上させることができる。
【0078】
次に、FEMウェハ計測時の測定成功率を向上することができる。露光装置のDose,Focus条件をウェハ面内で変更したいわゆるFEMウェハを計測する場合、ウェハ面内での各チップ(ショット)毎の測定対象パターンはそれぞれ変形している。本エミュレーション装置では擬似画像をチップ毎にDose,Focus条件を考慮して生成するため、測長のためのパラメータをチップ毎に調整することが可能となり、測定の成功率を向上させることができる。
【0079】
更に、ウェハが製造される前の段階での測定準備やレシピ検証が可能となる。
【0080】
以下、エミュレーションの具体的な態様を、図面を用いて説明する。エミュレーション処理は、主に図2のエミュレーション部211にて行われる。エミュレーション部211は、計測レシピを実行しその妥当性を検証し、必要に応じて異常の可能性のあるレシピの部分の修正を行うための指示を出力する。また、エミュレーションの副次的効果として転写形状シミュレーションの測定が行えるため、そのシミュレーションのモデルの検証を行うことができる。以下に本装置の主要部について説明する。
【0081】
(A)擬似画像の生成部(テンプレート生成部210)
測定対象となるウェハもしくはマスクレチクルのSEM画像に相当する擬似画像を生成する。擬似画像生成の対象は測定レシピに定義されているすべての測定座標に対して行うものであり、測定の対象となるウェハもしくはマスクレチクルの設計データまたはMDP処理されたマスクデータを用いて転写シミュレーションデータを取得した上で行う。また、この転写シミュレーションはシミュレーター220にて実施し、当該シミュレーション結果に基づいて演算処理装置205での処理を実行する。シミュレーションに際しては、実際のマスクレチクルの製造性を考慮した仕上がり状態を反映させるため、マスク製造工程での製造性を定義したマスクモデルを用いて製造要因を反映したマスク形状を用いた転写シミュレーションを行う。
【0082】
次に上記シミュレーションで求めた予測形状に基づき擬似画像の生成を行う。擬似画像の生成に際しては転写予測形状と予め多くのSEM画像が蓄積された画像ライブラリを用いてSEM画像を生成するものである。ライブラリは例えばメモリ208、或いはその他の演算処理装置205がアクセス可能な記憶媒体に記憶されている。このイメージライブラリの構成は半導体製造工程毎の画像を管理するものであり、画像の撮像条件として、画像取得時の加速電圧,プローブ電流,積算フレーム数等のSEMの電子光学系の条件毎に撮像された画像群を管理するものである。
【0083】
更に、撮像パターンの倍率とパターンサイズ毎に上記のイメージライブラリに登録されている。従って、計測レシピの実行に際してはレシピに記載されている上記のSEMの電子光学系の条件や撮像の倍率に合致する画像を検索し画像合成を行う。
【0084】
画像合成は、レシピに定義されている撮像条件に合致する画像をイメージライブラリより検索し選択する。この際、シミュレーションより得られた計測対象パターンの形状と一致率の高い登録画像の検出を行う。また、この際、パターンの粗密も考慮した類似形状の探索を行う。
【0085】
次に、これらの探索より選択された登録画像を解析し画素単位での輝度値を求め、必要に応じて輝度値の修正を行うようにしても良い。この場合、当該画像のホワイトバンドの幅及び中心となる画素の位置を求め、シミュレーション形状の各画素の位置に輝度情報を構築する。ホワイトバンドの幅や中心位置はパターンの粗密の状況やパターンの形状の特徴量に依存して変化するため、上記で示した計測対象パターンの形状と一致率の高い登録画像を解析し、この情報をシミュレーション形状にマッピングすることにより、高精度な擬似画像を得ることができる。
【0086】
また、半導体の工程毎にパターンのサイズや画像のエッジ位置が異なるため、前述した様にイメージライブラリには工程毎の画像を登録しておく必要がある。
【0087】
尚、イメージライブラリの画像としは測定の運用で実績のある画像が登録されており、半導体の製品デバイス製造でのシリーズ品種等の画像が多数登録されている場合が多い。
【0088】
製品デバイスの製造に於ける計測は同一形状を計測する場合が多く、測定対象パターンや測定のための位置決めを行うアドレッシングパターン等は既に計測の実績のあるパターンが多いため、上記で説明した同一形状を探索して擬似画像を生成する手法は極めて有効である。
【0089】
(B)マッチング処理部(マッチング処理部209)
計測レシピのエミュレーションを行うためには、上記で述べた擬似画像を用いて実際に計測を行う場合と同一の条件でマッチングを行う。測定を行うためのレシピには測定対象を示す対象パターンと位置決めを行うためのアドレッシングパターンが定義されているが通常、(I)設計データをマッチングパターンとして登録する方式と(II)SEM画像をマッチング様のテンプレートとして登録する2種の方法が用いられている。
【0090】
本エミュレーション手法では上記の2種のデータに対して上記で述べた擬似画像を用いてマッチングを行う。
【0091】
本エミュレーション手法では計測装置に搭載されているマッチングエンジンと同等のアルゴリズムを搭載することで、高精度なエミュレーションを実現することができる。
【0092】
尚、マッチングに際しては測定対象となる計測装置固有の精度情報を参照することでマッチング結果の評価の精度を向上させることができる。
【0093】
即ち、計測装置毎に固有に発生するステージ精度やイメージシフトの精度を装置毎にそれぞれ調整した補正情報を本エミュレーションで参照することで、マッチングの際の位置ずれの許容範囲をこの補正情報を加味して評価することにより、当該計測装置の位置決め精度を見積もることが可能となり、現実的な計測装置の精度の基でマッチング性能を判定することが可能となる。
【0094】
即ち、計測レシピで定義されている座標と画像合成で得られた座標は論理空間(設計データ座標系)で誤差が全く無い状態であり、そのままの状態でマッチングを行うとその成功率は高い傾向を示す場合があり、精度の高いエミュレーションが不可能となる。このため、上記の座標に対して計測装置毎の精度情報を用いてこの上記の座標に誤差として精度のばらつきを加えて、マッチングを行う。
【0095】
次にマッチング結果の判定を行い、擬似画像とマッチングテンプレートの間でズレが生じている場合、(I)設計データ上でアドレッシングパターンの再選択、(II)アドレッシングパターン撮像用のオートフォーカスパターンの妥当性の検証、(III)測定対象パターン撮像用のオートフォーカスパターンの妥当性の検証、(IV)マッチングモードの再選択(例えば、繰り返しパターン用やユニークパターン用のマッチングアルゴリズムの切り替え)等を行うことによって、マッチングの成功率を高めることが可能となる。更に必要に応じて擬似画像生成手段により生成した擬似画像をマッチングテンプレートとして用いる様、レシピの変更を行うことも可能である。
【0096】
(C)レシピ設定部(入力装置219)
前述したマッチング処理部にて確定した画像に対して計測レシピで定義されている測定が可能かについて判定を行い、必要に応じてレシピの再設定を行う。具体的にはレシピで指定されている測長位置にて当該画像が測定可能かを判定する。画像処理部207では、レシピにて指定されている測長部位の幅と高を示す領域内に測長対象となる画像のエッジが正しく存在するかの判定を行う。
【0097】
これは、当該画像からその形状を表わす輪郭形状(Contour)を抽出し、測長領域内にエッジが存在するかを判定する。その際、レシピにて指定されている測長の方向に対して直交するエッジ群が十分存在するかを判定する。図17は擬似画像から形成された輪郭線に対し、パターンマッチングによって、測定領域が設定されたテンプレートを重ね合わせたときの輪郭線画像と測定領域の位置関係を示す図である。本例の場合、L字型のパターンのX方向の線幅を測定するための測定領域が設定されているが、測定領域1701に含まれるエッジの内、右側に位置するエッジは、光近接効果により測定方向(X方向)に対して、斜めに形成されている。このような状態で測定を行うと、線幅ではなくパターンのコーナー部分の寸法を含む測定を行ってしまうことになるため、適正な位置に測定位置を修正する必要がある。例えば、正しい位置に配置された測定領域1702に当該領域を再設定する必要がある。
【0098】
パターンのコーナー近くの測定の場合にはパターンの仕上がり予測として曲折した輪郭形状が存在する場合があり、測定の異常もしくは測定が不安定となる可能性があるため、この様な場合には測長領域の位置を補正し、直線のエッジ群を多く含む様にレシピの修正を行う。
【0099】
本例では、まず、測定領域に含まれる輪郭線やエッジ情報が目的とする測定にとって適切なものであるか否かを判定する。図18は、測定領域内に含まれるパターン情報が適切なものか否かを判定する判定手法の概念図である。測定領域1701には、輪郭線1801の2つのエッジ(左側エッジ1802,右側エッジ1803)が含まれている。本例において、目的とする測定はX方向の線幅測定であるため、左側エッジ1802、右側エッジ1803のいずれもが、Y方向に沿って形成されている筈である。しかしながら、測定領域がずれていると、右側エッジ1803のように斜めの線分が測定領域の中に含まれることになる。このような状況を判定するために、本例では、測定領域内に含まれる所定の条件を持つ画素をカウントするための評価ウィンドウ1804をX方向に沿って移動させることで、測定領域内のパターンの方向を判定する。
【0100】
具体的には、画像処理部207によって、X方向の位置(Position)に対する検出された画素数(Pixels)の変化をモニターし、所定の画素数を超えた部分のエッジを適正に形成されたエッジとして、所定の画素数以下の部分はエッジがない、或いは適正にエッジが形成されていないと判定する。本例の場合、測定領域が適正な位置に位置付けられていれば、所定値を超えるピークが2つ現われるはずである。もし、所定値を超えるピークの数が2つ以外であった場合、適正な位置に測定領域が設定されていない旨のメッセージ、或いは自動補正を行うための信号を発生する。
【0101】
以上のような構成によれば、レシピの検証を容易に行うことが可能となる。エラーメッセージは、入力装置219に設けられた表示装置やその他の装置の表示装置に表示可能とすることによって、操作者は速やかに入力装置219等を介してレシピ修正を行うことが可能となる。
【0102】
また、上述のような測定領域判定法はあくまでも一例に過ぎず、測定領域内に含まれるパターンがあるべき形状となっているか否かの判定を行うことが可能な画像処理法であれば適用が可能である。例えば測定領域1701用のテンプレートを用意し、所定の一致度以上であれば適正な位置に測定領域が設定されていると判断し、一致度が所定値未満の場合は、誤った位置に測定領域が設定されていると判断するような手法が考えられる。
【0103】
次に、測定領域内に所望の測定個所が含まれていないと判断された場合に、当該測定領域の位置を自動修正する手法について説明する。図19は測定領域を少しずつずらし、適正な測定領域1702を探索する工程を示す図である。図20は、その探索工程を示すフローチャートである。測定領域1701の初期設定位置1901にて、図18に例示するような測定領域内の評価を行い、当該領域が所定の条件を満たさないと判断される場合(ステップ2001)に、画像処理装置207は、矢印の方向に向かって測定領域を移動させ(ステップ2002)、移動先にて同じように、測定領域内の評価を行う(ステップ2003)。本例の場合、渦巻き状に測定領域を移動させ、各移動先にて測定領域の評価を行い、評価結果が所定の条件を満たすか否かの判定を行う(ステップ2004)。所定の条件を満たした場合には、移動を終了し、当該測定領域の位置をレシピに登録する(ステップ2005)。図19は、2点目の移動点1902にて評価結果が所定の条件を満たしたとしてレシピ登録を行った例を示している。
【0104】
以上のような判定手法によればレシピ検証に基づく、レシピの再設定を自動で行うことが可能となる。
【0105】
尚、修正は自動で行う場合と操作者の判断に基づき修正を行う場合があり、本装置の画面上にて図17に示す状況(合成画像と測定領域の重畳表示画像)を表示し、操作者が指示を行うこともできる。
【0106】
また、この結果、妥当となった測長領域に対して測長装置に搭載されている閾値法等の測長アルゴリズムを用いて擬似画像の測長を行い、測長装置の出力形式で測長結果を出力する。
【0107】
以上、本実施例は計測レシピのエミュレーターに係り、計測レシピの妥当性を評価する例について説明したが、擬似画像を転写シミュレーションに基づいて生成することによって、シミュレーションの精度の検証にも用いることができる。即ち、本装置にて測定した測長値と設計データとの差分値または、擬似画像の輪郭線のエッジ位置と設計データの差分値をシミュレーションのためのモデルデータに反映し検証することができる。これにより転写シミュレーションの精度について検証を行うことができる。
【実施例4】
【0108】
これまで説明してきた実施例では、主にテンプレート作成、及びレシピエミュレーションを行うための装置等について説明したが、以下に設計データ上の1、或いは複数のテンプレート候補の検証、及び選択を行い得る装置等について説明する。図8はその工程を示すフローチャートである。まず、設計データ、或いはシミュレーション画像上にて任意のテンプレート候補領域を選択(ステップ801)、或いは設計データ上にて、候補位置を自動選択する(ステップ802)。
【0109】
テンプレート候補位置の選択は、入力装置219等で行い、自動選択は、パターン候補選択部216によって行われ、例えば設計データの測定領域周囲の複数位置について、自己相関処理に基づいて複数の対象候補を選択する。テンプレートマッチングの被探索領域内に自己相関値が高い個所が複数存在するということは、所望のマッチング位置以外に位置合わせされてしまう可能性が高いことを意味しているため、当該領域を除外して、マッチング位置候補を選択する。また、ステップ803では、ステップ802で抽出されたマッチング位置候補の中から所定の条件を満たす候補領域を抽出する。この候補抽出は、候補領域内にマッチングに適したユニークなパターンが存在する(例えばX方向の線分とY方向の線分の両方が含まれている)か否かの判定を行い、更に、候補を絞り込む。なお、自動で候補を絞り込む場合には、マッチングに適したユニークなパターン形状を選択する他の画像処理アルゴリズムを適用することもできる。
【0110】
以上のようにして選択された1又は複数のマッチング位置候補に含まれるパターンを分解し(ステップ804)、図1のステップ104〜107と同様に、合成画像を形成する(ステップ805〜808)。これを複数の候補について行い、パターン候補判定部217では、シミュレーション画像と合成画像の一致度の高いものを最終的なテンプレートとして登録する(ステップ810,811)。
【0111】
以上のような工程を経てテンプレートを形成することによって、既存の登録画像を利用して、SEMを稼働することなくSEM画像に近いテンプレートを作成することができる。
【符号の説明】
【0112】
201 SEM本体
202 走査偏向器
203 検出器
204 制御装置
205 演算処理装置
206 レシピ実行部
207 画像処理部
208 メモリ
209 マッチング処理部
210 テンプレート生成部
211 エミュレーション部
218 設計データ記憶媒体
219 入力装置
220 シミュレーター
【特許請求の範囲】
【請求項1】
半導体素子の設計データに基づいて、荷電粒子線装置の動作条件を設定する画像処理部を備えた画像処理装置において、
当該画像処理部は、荷電粒子線装置の装置条件情報、パターンの種類、及びパターンの部位毎のパターン情報の複数の組み合わせを記憶するライブラリにアクセス可能に構成され、前記装置条件、及びパターンの種類の選択に基づいて、前記パターンの部位毎のパターン情報を用いた各部位の合成画像を形成する合成画像形成部を備えたことを特徴とする画像処理装置。
【請求項2】
請求項1において、
前記パターン情報は画像データであって、前記画像処理部は、前記ライブラリに記憶された画像を合成して合成画像を形成することを特徴とする画像処理装置。
【請求項3】
請求項1において、
前記パターン情報はパターンエッジの輝度分布情報、及びパターン及び背景部の輝度情報であって、前記画像処理部は、前記設計データに基づいて得られる図形データを前記輝度分布情報、及び輝度情報に基づいて画像処理することを特徴とする画像処理装置。
【請求項4】
請求項1において、
前記画像処理部は、前記合成画像と前記設計データに基づいて形成される図形データとの間でテンプレートマッチングを実行するマッチング処理部を備えたことを特徴とする画像処理装置。
【請求項5】
請求項4において、
前記画像処理部は、前記図形データと併せて登録された測定領域内に前記合成画像の測定対象となるパターンが含まれるか否かの判定を行うことを特徴とする画像処理装置。
【請求項6】
請求項5において、
前記画像処理部は、前記測定領域内に、測定対象となるパターンが含まれていないと判定したときに、前記測定対象となるパターンが含まれる領域を探索することを特徴とする画像処理装置。
【請求項7】
請求項4において、
前記画像処理部は、前記測定領域と前記合成画像を重畳した画像データを生成することを特徴とする画像処理装置。
【請求項8】
請求項1において、
前記画像処理部は、前記合成画像を、テンプレートマッチング用のテンプレートとして記憶媒体に登録することを特徴とする画像処理装置。
【請求項9】
請求項1において、
前記画像処理装置は、前記合成画像をテンプレートとするパターンマッチングを実行するマッチング処理部を備えたことを特徴とする画像処理装置。
【請求項10】
請求項1において、
前記画像処理部は、前記合成画像をテンプレートマッチングの被探索画像として、テンプレートマッチングを実行することを特徴とする画像処理装置。
【請求項11】
設計データに基づいて形成されたテンプレートを用いて、画像上でテンプレートマッチングをコンピューターに実行させるコンピュータープログラムにおいて、
当該プログラムは、前記コンピューターに、荷電粒子線装置の装置条件情報,パターンの種類、及びパターンの部位毎のパターン情報の複数の組み合わせを記憶するライブラリにアクセスさせ、前記装置条件、及びパターンの種類の選択に基づいて、前記パターンの部位毎のパターン情報を用いた各部位の合成画像を形成させることを特徴とするコンピュータープログラム。
【請求項12】
請求項11において、
前記パターン情報は画像データであって、前記プログラムは、前記コンピューターに前記ライブラリに記憶された画像を合成して合成画像を形成させることを特徴とするコンピュータープログラム。
【請求項13】
請求項11において、
前記パターン情報はパターンエッジの輝度分布情報、及びパターン及び背景部の輝度情報であって、前記プログラムは、前記コンピューターに前記設計データに基づいて得られる図形データを前記輝度分布情報、及び輝度情報に基づいて画像処理させることを特徴とするコンピュータープログラム。
【請求項14】
請求項11において、
前記プログラムは、前記コンピューターに前記合成画像と前記設計データに基づいて形成される図形データとの間でテンプレートマッチングを実行させること特徴とするコンピュータープログラム。
【請求項15】
請求項14において、
前記プログラムは、前記コンピューターに前記図形データと併せて登録された測定領域内に前記合成画像の測定対象となるパターンが含まれるか否かの判定を行わせることを特徴とするコンピュータープログラム。
【請求項1】
半導体素子の設計データに基づいて、荷電粒子線装置の動作条件を設定する画像処理部を備えた画像処理装置において、
当該画像処理部は、荷電粒子線装置の装置条件情報、パターンの種類、及びパターンの部位毎のパターン情報の複数の組み合わせを記憶するライブラリにアクセス可能に構成され、前記装置条件、及びパターンの種類の選択に基づいて、前記パターンの部位毎のパターン情報を用いた各部位の合成画像を形成する合成画像形成部を備えたことを特徴とする画像処理装置。
【請求項2】
請求項1において、
前記パターン情報は画像データであって、前記画像処理部は、前記ライブラリに記憶された画像を合成して合成画像を形成することを特徴とする画像処理装置。
【請求項3】
請求項1において、
前記パターン情報はパターンエッジの輝度分布情報、及びパターン及び背景部の輝度情報であって、前記画像処理部は、前記設計データに基づいて得られる図形データを前記輝度分布情報、及び輝度情報に基づいて画像処理することを特徴とする画像処理装置。
【請求項4】
請求項1において、
前記画像処理部は、前記合成画像と前記設計データに基づいて形成される図形データとの間でテンプレートマッチングを実行するマッチング処理部を備えたことを特徴とする画像処理装置。
【請求項5】
請求項4において、
前記画像処理部は、前記図形データと併せて登録された測定領域内に前記合成画像の測定対象となるパターンが含まれるか否かの判定を行うことを特徴とする画像処理装置。
【請求項6】
請求項5において、
前記画像処理部は、前記測定領域内に、測定対象となるパターンが含まれていないと判定したときに、前記測定対象となるパターンが含まれる領域を探索することを特徴とする画像処理装置。
【請求項7】
請求項4において、
前記画像処理部は、前記測定領域と前記合成画像を重畳した画像データを生成することを特徴とする画像処理装置。
【請求項8】
請求項1において、
前記画像処理部は、前記合成画像を、テンプレートマッチング用のテンプレートとして記憶媒体に登録することを特徴とする画像処理装置。
【請求項9】
請求項1において、
前記画像処理装置は、前記合成画像をテンプレートとするパターンマッチングを実行するマッチング処理部を備えたことを特徴とする画像処理装置。
【請求項10】
請求項1において、
前記画像処理部は、前記合成画像をテンプレートマッチングの被探索画像として、テンプレートマッチングを実行することを特徴とする画像処理装置。
【請求項11】
設計データに基づいて形成されたテンプレートを用いて、画像上でテンプレートマッチングをコンピューターに実行させるコンピュータープログラムにおいて、
当該プログラムは、前記コンピューターに、荷電粒子線装置の装置条件情報,パターンの種類、及びパターンの部位毎のパターン情報の複数の組み合わせを記憶するライブラリにアクセスさせ、前記装置条件、及びパターンの種類の選択に基づいて、前記パターンの部位毎のパターン情報を用いた各部位の合成画像を形成させることを特徴とするコンピュータープログラム。
【請求項12】
請求項11において、
前記パターン情報は画像データであって、前記プログラムは、前記コンピューターに前記ライブラリに記憶された画像を合成して合成画像を形成させることを特徴とするコンピュータープログラム。
【請求項13】
請求項11において、
前記パターン情報はパターンエッジの輝度分布情報、及びパターン及び背景部の輝度情報であって、前記プログラムは、前記コンピューターに前記設計データに基づいて得られる図形データを前記輝度分布情報、及び輝度情報に基づいて画像処理させることを特徴とするコンピュータープログラム。
【請求項14】
請求項11において、
前記プログラムは、前記コンピューターに前記合成画像と前記設計データに基づいて形成される図形データとの間でテンプレートマッチングを実行させること特徴とするコンピュータープログラム。
【請求項15】
請求項14において、
前記プログラムは、前記コンピューターに前記図形データと併せて登録された測定領域内に前記合成画像の測定対象となるパターンが含まれるか否かの判定を行わせることを特徴とするコンピュータープログラム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【公開番号】特開2012−177632(P2012−177632A)
【公開日】平成24年9月13日(2012.9.13)
【国際特許分類】
【出願番号】特願2011−41109(P2011−41109)
【出願日】平成23年2月28日(2011.2.28)
【出願人】(501387839)株式会社日立ハイテクノロジーズ (4,325)
【Fターム(参考)】
【公開日】平成24年9月13日(2012.9.13)
【国際特許分類】
【出願日】平成23年2月28日(2011.2.28)
【出願人】(501387839)株式会社日立ハイテクノロジーズ (4,325)
【Fターム(参考)】
[ Back to top ]