
画像処理装置、画像処理システム、カメラ及びカメラシステム
【課題】対象物を効率良く検出することができる画像処理装置、画像処理システム、カメラ及びカメラシステム等を提供すること。
【解決手段】画像処理装置100は、赤外線画像データを取得する画像取得部110と、画像取得部110により取得された赤外線画像データに基づく画像領域に対して、画像領域を複数の領域に分割する境界線を設定し、境界線によって分割された複数の領域のうちの少なくとも1つの領域を画素密度変更領域ARMDに設定する領域設定部120と、画素密度変更領域ARMDの赤外線画像データの画素密度を低減する処理を行い、画素密度変更領域ARMDを含む画像領域の赤外線画像データに基づいて対象物の検出処理を行い、検出処理の結果に基づいて表示用画像データを生成する処理部とを含む。
【解決手段】画像処理装置100は、赤外線画像データを取得する画像取得部110と、画像取得部110により取得された赤外線画像データに基づく画像領域に対して、画像領域を複数の領域に分割する境界線を設定し、境界線によって分割された複数の領域のうちの少なくとも1つの領域を画素密度変更領域ARMDに設定する領域設定部120と、画素密度変更領域ARMDの赤外線画像データの画素密度を低減する処理を行い、画素密度変更領域ARMDを含む画像領域の赤外線画像データに基づいて対象物の検出処理を行い、検出処理の結果に基づいて表示用画像データを生成する処理部とを含む。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、画像処理装置、画像処理システム、カメラ及びカメラシステム等に関する。
【背景技術】
【0002】
ドライバーにとって車外からの視覚情報は運転操作上きわめて重要である。しかしながら、夜間の低照度環境や対向車のライトのような強力な光源の存在によって眩惑されるような環境で運転しなければならない場合も多い。このような肉眼での視認性が悪い環境では、注意深いドライバーにとっても自車に接近する歩行者などの対象物の発見が遅れがちである。
【0003】
このようなドライバー側の生理学的な問題をカバーするための技術として、赤外線カメラ及び可視カメラにより得られた画像から歩行者等を検出し、画像を加工して表示する手法が、特許文献1に開示されている。
【0004】
しかしながらこの手法では、対象物を検出するための検出処理の演算処理負荷が大きくなるために、検出時間が長くなる、検出装置が高価になるなどの問題がある。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2008−236349号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
本発明の幾つかの態様によれば、対象物を効率良く検出することができる画像処理装置、画像処理システム、カメラ及びカメラシステム等を提供できる。
【課題を解決するための手段】
【0007】
本発明の一態様は、赤外線画像データを取得する画像取得部と、前記画像取得部により取得された前記赤外線画像データに基づく画像領域に対して、前記画像領域を複数の領域に分割する境界線を設定し、前記境界線によって分割された複数の領域のうちの少なくとも1つの領域を画素密度変更領域に設定する領域設定部と、前記画素密度変更領域の前記赤外線画像データの画素密度を低減する処理を行い、前記画素密度変更領域を含む前記画像領域の前記赤外線画像データに基づいて対象物の検出処理を行い、前記検出処理の結果に基づいて表示用画像データを生成する処理部とを含む画像処理装置に関係する。
【0008】
本発明の一態様によれば、赤外線画像データ基づく画像領域に対して、例えば歩行者などの対象物が存在する可能性の低い領域を画素密度変更領域に設定し、その領域の赤外線画像データの画素密度を低減することができる。こうすることで、対象物の検出能力などを低下させずに、検出処理にかかる演算処理負担を低減することができる。その結果、検出時間を短縮したり、処理部の構成を簡素にすることなどが可能になり、効率の良い画像処理装置を実現することなどが可能になる。
【0009】
また本発明の一態様では、前記領域設定部は、前記画像領域における位置及び形状のうちの少なくとも1つが可変に設定される前記境界線を用いて前記画像領域を区画する設定パターンを決定し、決定された前記設定パターンにおいて前記境界線の前記画像領域における位置及び形状のうちの少なくとも1つを定めてもよい。
【0010】
このようにすれば、領域設定部は、決定された設定パターンにおいて境界線の画像領域における位置及び形状のうちの少なくとも1つを可変に設定することができるから、例えば車両の走行状況などに応じて適切な画素密度変更領域を設定することができる。
【0011】
また本発明の一態様では、前記領域設定部は、前記画像領域を分割する前記境界線を用いて前記画像領域を区画する第1の設定パターンを決定可能に備え、決定された前記設定パターンが前記第1の設定パターンである場合には、前記境界線により分割された画像領域のうち、一方の画像領域を前記画素密度変更領域に設定してもよい。
【0012】
このようにすれば、例えば郊外の道路のように、車両が比較的スムーズに走行している状況などでは、第1の設定パターンにより画像領域を分割することで、対象物が存在する可能性が低い境界線の下側の画像領域を画素密度変更領域に設定することができる。その結果、対象物の検出能力等を低下させずに、検出処理にかかる演算処理負担を低減することができる。
【0013】
また本発明の一態様では、前記領域設定部は、前記画像領域を3分割し互いに交差しない2本の前記境界線を用いて前記画像領域を区画する第2の設定パターンを決定可能に備え、決定された前記設定パターンが前記第2の設定パターンである場合には、前記境界線により3分割された画像領域のうち、前記2本の境界線で挟まれる画像領域を前記画素密度変更領域に設定してもよい。
【0014】
このようにすれば、例えば車両が市街地の道路を走行している状況などでは、第2の設定パターンにより画像領域を3分割することで、対象物が存在する可能性が低い2本の境界線で挟まれる画像領域を画素密度変更領域に設定することができる。その結果、対象物の検出能力等を低下させずに、検出処理にかかる演算処理負担を低減することができる。
【0015】
また本発明の一態様では、前記領域設定部は、前記画像領域において一部の領域を囲む閉曲線を前記境界線として用いて前記画像領域を区画する第3の設定パターンを決定可能に備え、決定された前記設定パターンが前記第3の設定パターンである場合には、前記閉曲線の外側の前記画像領域を前記画素密度変更領域に設定してもよい。
【0016】
このようにすれば、例えば山間部のように、車両が交通量の少ない道路を走行している状況などでは、第3の設定パターンにより閉曲線で画像領域を区画し、対象物が存在する可能性が低い閉曲線の外側の画像領域を画素密度変更領域に設定することができる。その結果、対象物の検出能力等を低下させずに、検出処理にかかる演算処理負担を低減することができる。
【0017】
また本発明の一態様では、前記表示用画像データは、前記検出処理の結果に基づくアラート表示を含んでもよい。
【0018】
このようにすれば、視認性の良いアラート記号を表示することで、ドライバーの危険予知を容易にすることができる。
【0019】
また本発明の一態様では、前記赤外線画像データは、車両の外部領域の赤外線画像の画像データであり、前記領域設定部は、前記車両の走行状況情報に基づいて、前記設定パターンを決定し、決定された前記設定パターンにおいて前記境界線の前記画像領域における位置及び形状のうちの少なくとも1つを定めてもよい。
【0020】
このようにすれば、領域設定部は、車両の走行状況に基づいて画素密度変更領域を設定することができるから、例えば車両の速度などに応じて歩行者等の対象物が存在する可能性が高い領域を除いた画像領域を画素密度変更領域として設定することなどが可能になる。
【0021】
また本発明の一態様では、前記車両の走行状況情報は、前記車両の速度情報であってもよい。
【0022】
このようにすれば、例えば車両速度が速いほど、より遠方の対象物を効率良く検出できるように画素密度変更領域を設定し、また車両速度が遅いほど、より近くの対象物を効率良く検出できるように画素密度変更領域を設定することなどが可能になる。
【0023】
また本発明の一態様では、前記領域設定部は、ユーザーによる入力情報に基づいて、前記設定パターンを決定し、決定された前記設定パターンにおいて前記境界線の前記画像領域における位置及び形状のうちの少なくとも1つを定めてもよい。
【0024】
このようにすれば、ユーザーが車両の走行状況や道路状況などを判断して、適切な画素密度変更領域を設定することができる。
【0025】
また本発明の一態様では、走行モードと防犯モードとのモード切換設定を行うモード設定部をさらに含み、前記走行モードに設定されている場合には、前記領域設定部は、前記画素密度変更領域を設定し、前記処理部は、前記画素密度変更領域の前記赤外線画像データの画素密度を低減する処理を行い、前記画素密度変更領域を含む前記画像領域の前記赤外線画像データに基づいて前記検出処理を行い、前記検出処理の結果に基づくアラート表示を含む表示用画像データを生成する処理を行い、前記防犯モードに設定されている場合には、前記領域設定部は、前記境界線を非設定にし、前記処理部は、前記画像領域の全領域に対して前記赤外線画像データの画素密度を低減する処理を行い、前記画像領域の前記赤外線画像データに基づいて前記検出処理を行い、前記検出処理の結果に基づくアラート表示を含む表示用画像データを生成する処理を行ってもよい。
【0026】
このようにすれば、車両の走行時には、モード設定部が走行モードに設定することにより、例えば道路を横断する歩行者等を効率良く検知してドライバーに知らせることができる。また、車両の駐車時には、モード設定部が防犯モードに設定することにより、例えば夜間の自宅への不審者の侵入などを検知し、ユーザーに通報することなどが可能になる。
【0027】
また本発明の一態様では、前記処理部は、前記画素密度変更領域と前記画素密度変更領域以外の領域とでは、前記検出処理の内容を異ならせてもよい。
【0028】
このようにすれば、対象物を検出するための検出処理として例えばテンプレートマッチング処理を行う場合に、画素密度変更領域に対しては精度の低いテンプレートを選択し、画素密度変更領域以外の領域に対しては精度の高いテンプレートを選択することができる。その結果、検出処理時間を短縮することができるから、対象物を効率良く検出することなどが可能になる。
【0029】
また本発明の一態様では、前記処理部は、前記画素密度変更領域以外の領域での前記検出処理の結果に基づいて、前記画素密度変更領域での前記検出処理を行ってもよい。
【0030】
このようにすれば、例えば画素密度変更領域以外の領域において対象物が検出された場合に、その検出結果に基づいて画素密度変更領域での検出処理を行うことができるから、効率の良い検出処理を行うことなどが可能になる。
【0031】
また本発明の一態様では、前記画素密度変更領域以外の領域での前記検出処理の結果は、前記対象物の動きベクトルを含んでもよい。
【0032】
このようにすれば、例えば画素密度変更領域以外の領域において対象物が検出された場合に、この対象物の動きベクトルに基づいて対象物の移動先を予測することができる。そして対象物が画素密度変更領域に移動することが予測された場合には、例えばその対象物に対応するテンプレートを予め選択することができる。その結果、画素密度変更領域において対象物を効率良く検出することなどが可能になる。
【0033】
また本発明の一態様では、前記画像取得部は、可視画像データを取得し、前記処理部は、前記検出処理を行って、前記検出処理の結果に基づくアラート記号と前記可視画像データとを重畳して表示用画像データを生成する処理を行ってもよい。
【0034】
このようにすれば、対象物が検出された場合に、その対象物に対応するアラート表示を可視画像に重畳して表示することができるから、ドライバーは視認性の良いアラート表示によって危険を察知することが容易になる。その結果、例えば夜間運転中のドライバーの負担を軽減することなどが可能になる。
【0035】
本発明の他の態様は、上記いずれかに記載の画像処理装置と、赤外線画像撮像部とを含むカメラシステムに関係する。
【0036】
本発明の他の態様は、上記いずれかに記載の画像処理装置と、赤外線画像撮像部と、前記画像処理装置と前記赤外線画像撮像部とが内部に配設された筐体とを含むカメラに関係する。
【0037】
本発明の他の態様は、上記いずれかに記載の画像処理装置と、赤外線画像撮像部と、前記表示用画像データに基づく画像を表示する表示部とを含むカメラシステムに関係する。
【0038】
本発明の他の態様は、上記いずれかに記載の画像処理装置と、赤外線画像撮像部と、前記表示用画像データに基づく画像を表示する表示部と前記画像処理装置と前記赤外線画像撮像部と前記表示部とが内部に配設された筐体とを含むカメラに関係する。
【0039】
本発明の他の態様は、赤外線画像データを取得する画像取得部と、前記画像取得部により取得された前記赤外線画像データに基づく画像領域に対して、前記画像領域を複数の領域に分割する境界線を設定し、前記境界線によって分割された複数の領域のうち少なくとも1つの領域を画素密度変更領域に設定する領域設定部と、前記画素密度変更領域の前記赤外線画像データの画素密度を低減する処理を行い、前記画素密度変更領域を含む前記画像領域の前記赤外線画像データに基づいて対象物の検出処理を行い、前記検出処理の結果に基づいて表示用画像データを生成する処理部とを含む画像処理システムに関係する。
【0040】
本発明の他の態様は、上記いずれかに記載の画像処理装置と、前記表示用画像データに基づく画像を表示する表示部とを含む画像処理システムに関係する。
【0041】
本発明の他の態様は、赤外線撮像素子が2次元配列された撮像領域を備え、前記撮像領域の一部の領域では前記赤外線撮像素子の間隔が第1の間隔であり、前記撮像領域の前記一部の領域以外の領域では前記赤外線撮像素子の間隔が前記第1の間隔より広い第2の間隔である赤外線画像撮像部と、前記赤外線画像撮像部で撮像された赤外線画像データを取得する画像取得部と、前記画像取得部により取得された前記赤外線画像データのうちの前記撮像領域に対応した画像領域に対して前記赤外線画像データに基づいて対象物の検出処理を行い、前記検出処理の結果に基づいて表示用画像データを生成する処理部とを含むカメラに関係する。
【0042】
本発明の他の態様によれば、画像取得部は、撮像領域の一部の領域では画素密度が高く、撮像領域の一部の領域以外の領域では画素密度が低い赤外線画像データを取得することができる。こうすることで、赤外線画像データの画素数を低減させることができるから、検出処理における演算処理負担を低減することができる。その結果、検出時間を短縮したり、処理部の構成を簡素にすることなどが可能になり、効率の良いカメラを実現することなどが可能になる。
【図面の簡単な説明】
【0043】
【図1】画像処理装置、画像処理システム、カメラ及びカメラシステムの第1の構成例。
【図2】画像処理装置、画像処理システム、カメラ及びカメラシステムの第2の構成例。
【図3】画像処理装置、画像処理システム、カメラ及びカメラシステムの第3の構成例。
【図4】カメラの第4の構成例。
【図5】図5(A)〜図5(C)は、3つの走行状況における画素密度変更領域の設定例。
【図6】図6(A)、図6(B)は、第1の構成例による画素密度低減処理を説明する図。
【図7】第1の構成例による画素密度低減処理を説明する図。
【図8】図8(A)、図8(B)は、第2の構成例による画素密度低減処理を説明する図。
【図9】図9(A)、図9(B)は、第2の構成例による画素密度低減処理を説明する図。
【図10】画像処理装置等における検出処理のフローチャート。
【図11】図11(A)〜図11(C)は、3つの走行状況におけるアラート表示の例。
【図12】第3の構成例における防犯モードを説明する図。
【図13】第3の構成例による防犯モードの処理のフローチャート。
【図14】図14(A)、図14(B)は、カメラシステムの車両への搭載例。
【発明を実施するための形態】
【0044】
以下、本発明の好適な実施の形態について詳細に説明する。なお以下に説明する本実施形態は特許請求の範囲に記載された本発明の内容を不当に限定するものではなく、本実施形態で説明される構成の全てが本発明の解決手段として必須であるとは限らない。
【0045】
1.画像処理装置、画像処理システム、カメラ及びカメラシステム
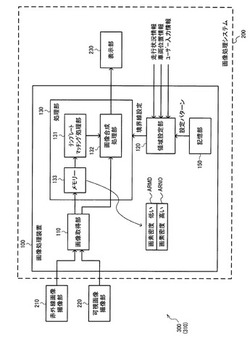
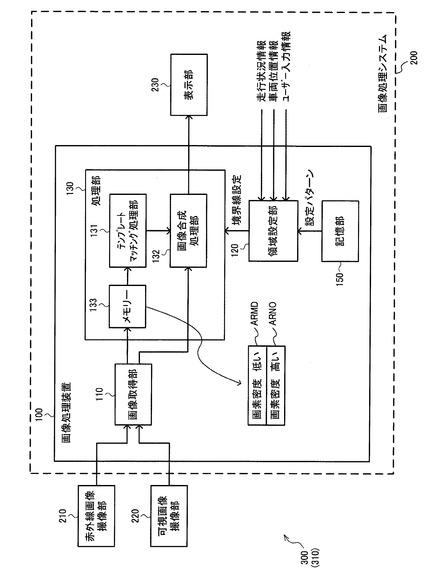
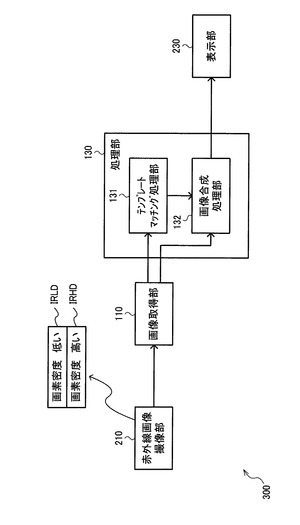
図1に、本実施形態の画像処理装置100、画像処理システム200、カメラ300及びカメラシステム310の第1の構成例を示す。第1の構成例の画像処理装置100は、画像取得部110、領域設定部120、処理部130を含み、記憶部150をさらに含んでもよい。画像処理システム200は、画像処理装置100及び表示部230を含む。カメラ300は、画像処理装置100、赤外線画像撮像部210、筐体(図示せず)を含み、表示部230をさらに含んでもよい。カメラシステム310は、画像処理装置100及び赤外線画像撮像部210を含み、さらに表示部230を含んでもよい。また、画像処理システム200は、画像取得部110、領域設定部120、処理部130を含む構成としてもよい。
【0046】
なお、本実施形態の画像処理装置100、画像処理システム200、カメラ300及びカメラシステム310は、図1の構成に限定されず、その構成要素の一部を省略したり、他の構成要素に置き換えたり、他の構成要素を追加するなどの種々の変形実施が可能である。
【0047】
画像取得部110、領域設定部120、処理部130は、例えばCPUなどのプロセッサーやゲートアレイなどのASICにより実現することができる。また、記憶部150は、例えばRAM、フラッシュメモリー、或いはハードディスクドライブ(HDD)などにより実現することができる。なお、記憶部150は、省略してもよい。
【0048】
画像取得部110は、赤外線画像撮像部210からの赤外線画像を取得し、処理部130に対して赤外線画像データを出力する。赤外線画像データは、例えば車両の外部領域の赤外線画像の画像データである。
【0049】
また、画像取得部110は、可視画像撮像部220からの可視画像データを取得し、処理部130に対して可視画像データを出力する。
【0050】
領域設定部120は、画像取得部110により取得された赤外線画像データに基づく画像領域に対して、画像領域を複数の領域に分割する境界線を設定し、境界線によって分割された複数の領域のうちの少なくとも1つの領域を画素密度変更領域に設定する。具体的には、領域設定部120は、画像領域における位置及び形状のうちの少なくとも1つが可変に設定される境界線を用いて画像領域を区画する設定パターンを決定する。そして決定された設定パターンにおいて境界線の画像領域における位置及び形状のうちの少なくとも1つを定める。
【0051】
より具体的には、領域設定部120は、車両の走行状況情報や全地球測位システム(GPS)により取得された車両位置情報やユーザーによる入力情報などに基づいて、設定パターンを決定し、決定された設定パターンにおいて境界線の画像領域における位置及び形状のうちの少なくとも1つを定める。例えば、領域設定部120は、車両の速度情報やヘッドライトの制御情報などに基づいて設定パターンを決定し、境界線の位置及び形状のうちの少なくとも1つを定めることができる。なお、走行状況に応じた設定パターンについては、後で説明する。
【0052】
ここで画像領域とは、例えば2次元的に撮像素子が配置された赤外線画像撮像部210により撮像され、画像取得部110により所定の時間間隔で取得される1画面(フレーム)分の画像データである。即ち、1つの画像領域は、赤外線画像撮像部210により或るタイミングで撮像された1つの画面(フレーム)を構成する赤外線画像データである。
【0053】
処理部130は、画素密度変更領域の赤外線画像データの画素密度を低減する処理(画素密度低減処理)を行う。そして画素密度変更領域を含む画像領域の赤外線画像データに基づいて対象物の検出処理(テンプレートマッチング処理)を行い、検出処理の結果に基づいて表示用画像データを生成する。この表示用画像データは、検出処理の結果に基づくアラート表示を含んでもよい。また、処理部130は、検出処理を行って、検出処理の結果に基づくアラート記号と可視画像データとを重畳して表示用画像データを生成する処理を行う。
【0054】
具体的には、処理部130は、領域設定部120により設定された画素密度変更領域ARMDの赤外線画像データに対して画素密度を低減する処理を行う。この画素密度を低減する処理(画素密度低減処理)は、画像データ上で等価的に画素密度、即ち単位面積当たりの画素数を減少させる処理であって、例えば1画面(フレーム)を構成する画像データのうちの一定の領域(画素密度変更領域)内にある画素を間引く処理(間引き処理)である。一方、画素密度変更領域ARMDを除く画像領域の赤外線画像データに対しては、画素密度低減処理を行わない。以下では、画素密度変更領域ARMDを除く画像領域を画素密度非変更領域ARNOとも呼ぶ。なお、画素密度低減処理については、後で詳細に説明する。
【0055】
また処理部130は、画素密度変更領域ARMDを含む画像領域の赤外線画像データ、即ち画素密度低減処理を行った後の赤外線画像データに基づいて、対象物の検出処理(テンプレートマッチング処理)を行う。即ち、画素密度変更領域ARMDでは画素密度非変更領域ARNOに比べて画素密度が低い赤外線画像データに基づいて、対象物(例えば歩行者、自転車など)を検出するための検出処理を行う。或いは、画素密度変更領域ARMDでは画素密度が第1のしきい値よりも低く、画素密度非変更領域ARNOでは画素密度が第2のしきい値よりも高い赤外線画像データに基づいて、対象物を検出するための検出処理を行う。ここで、第1のしきい値は第2のしきい値以下の値であって、第2のしきい値は赤外線画像撮像部210において実現可能な画素密度の範囲の値であってもよい。なお、第1、第2のしきい値は、同じ値であってもよい。
【0056】
処理部130は、テンプレートマッチング処理部131、画像合成処理部132、メモリー133を含む。メモリー133は、画素密度変更領域ARMDに対して画素密度低減処理(間引き処理)を行った後の赤外線画像データを記憶する。このようにすることで、メモリー133に記憶された赤外線画像データの画素密度変更領域ARMDの画素密度は第1のしきい値よりも低く、画素密度非変更領域ARNOの画素密度は第2のしきい値よりも高くなる。テンプレートマッチング処理部131は、メモリー133に記憶された間引き処理後の赤外線画像データに対して、対象物を検出するためのテンプレートマッチング処理を行う。
【0057】
画像合成処理部132は、テンプレートマッチング処理結果に基づいて、可視画像データにアラート表示(アラート記号)などを重畳する処理を行う。画像合成処理部132は、必要に応じて他の情報をさらに合成(重畳)する処理を行ってもよい。また、画像合成処理部132は、アラート表示を赤外線画像データに重畳する処理を行ってもよいし、或いは可視画像データ、赤外線画像データ及びアラート表示などを合成(重畳)する処理を行ってもよい。
【0058】
アラート表示は、ドライバーに歩行者や自転車などの存在を知らせるための記号(アラート記号)である。アラート表示が重畳された可視画像は、表示部230に表示される。視認性の良いアラート記号を表示することで、ドライバーの危険予知を容易にすることができる。なお、テンプレートマッチング処理及びアラート表示の詳細については、後述する。
【0059】
記憶部150は、画素密度変更領域ARMDと画素密度非変更領域ARNOとの境界線を設定する複数の設定パターンを記憶する。領域設定部120は、記憶部150から複数の設定パターンのうちのいずれか1つの設定パターンを選択して読み出し、読み出された設定パターンに基づいて境界線を設定することができる。こうすることで、例えば予め複数の走行状況に対応する複数の設定パターンを記憶部150に記憶しておくことができるから、走行状況に応じて最適な設定パターンを選択することなどが可能になる。
【0060】
赤外線画像撮像部210は、赤外線カメラであって、例えば波長が8〜12μmの遠赤外線に感度を有するものである。遠方(例えば200m先)の対象物を検出するために、焦電素子を用いた赤外線センサーカメラであれば、さらに良い。
【0061】
可視画像撮像部220は、可視光領域に感度を有するカメラであって、例えば撮像素子としてCCDやCMOSなどを用いるものである。このカメラは、高ダイナミックレンジ(HDR:High Dynamic Range)形式の画像データに対応できるものが望ましい。HDR形式対応のカメラでは、電子シャッター機能を用いて高速・低速の異なるシャッター時間で被写体の撮像を行い、その2種類の画像信号を信号処理して広いダイナミックレンジを持つ画像を得ることができる。こうすることで、例えば夜間の走行時において、通常は対向車のヘッドライトに妨げられて見えにくくなっている歩行者や対向車自身などを、明瞭に映し出すことができる。
【0062】
表示部230は、赤外線画像、可視画像及びアラート記号などを含む画像を表示する。表示部230は、例えば液晶ディスプレイ、有機ELディスプレイなどで実現することができる。
【0063】
筐体は、図示していないが、その内部に画像処理装置100と赤外線画像撮像部210とが配設される。
【0064】
図1に示す第1の構成例の画像処理装置100等によれば、テンプレートマッチング処理の対象となる赤外線画像データの画素数を低減させることができるから、検出処理における演算処理負担を低減することができる。また、対象物を検出した場合に、可視画像の対応する位置に視認性の良いアラート表示を重畳して表示することができるから、夜間運転中のドライバーの負担を軽減することなどが可能になる。
【0065】
さらに領域設定部120が、車両の走行状況情報や車両位置情報やユーザーによる入力情報などに基づいて、設定パターンを決定し、決定された設定パターンにおいて境界線の画像領域における位置及び形状のうちの少なくとも1つを定めることができる。こうすることで、車両の走行状況などに応じて画素密度変更領域ARMD及び画素密度非変更領域ARNOを可変に設定することができるから、多様な走行状況や交通状況などに対応して、歩行者などの対象物が存在する可能性の低い領域を画素密度変更領域ARMDに設定し、歩行者などの対象物が存在する可能性の高い領域を画素密度非変更領域ARNOに設定することができる。その結果、対象物の検出能力(検出精度)を低下させずに、演算処理負担を低減することができる。その結果、検出処理の処理時間を短縮したり、処理部130の回路構成を簡素にすることが可能になり、効率の良い画像処理装置等を実現することなどが可能になる。
【0066】
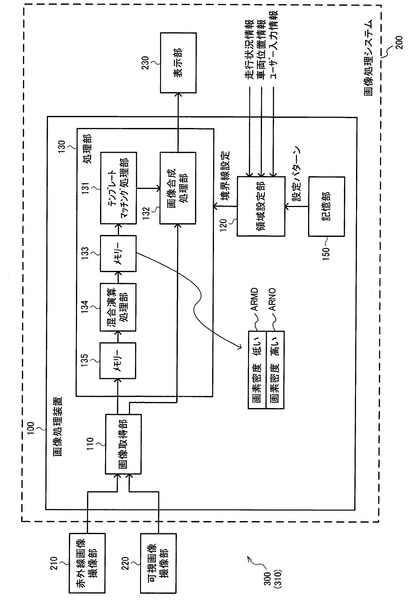
図2に、本実施形態の画像処理装置100、画像処理システム200、カメラ300及びカメラシステム310の第2の構成例を示す。第2の構成例の画像処理装置100は、画像取得部110、領域設定部120、処理部130を含み、記憶部150をさらに含んでもよい。画像処理システム200は、画像処理装置100及び表示部230を含む。カメラ300は、画像処理装置100、赤外線画像撮像部210、筐体(図示せず)を含み、表示部230をさらに含んでもよい。カメラシステム310は、画像処理装置100及び赤外線画像撮像部210を含み、さらに表示部230を含んでもよい。また、画像処理システム200は、画像取得部110、領域設定部120、処理部130を含む構成としてもよい。
【0067】
なお、本実施形態の画像処理装置100、画像処理システム200、カメラ300及びカメラシステム310は、図2の構成に限定されず、その構成要素の一部を省略したり、他の構成要素に置き換えたり、他の構成要素を追加するなどの種々の変形実施が可能である。
【0068】
画像取得部110、領域設定部120、記憶部150は、第1の構成例(図1)で説明したものと同一であるから、ここでは詳細な説明を省略する。
【0069】
処理部130は、画素密度変更領域の赤外線画像データの画素密度を低減する処理(画素密度低減処理)を行う。そして画素密度変更領域を含む画像領域の赤外線画像データに基づいて対象物の検出処理(テンプレートマッチング処理)を行い、検出処理の結果に基づいて表示用画像データを生成する。この表示用画像データは、検出処理の結果に基づくアラート表示を含んでもよい。また、処理部130は、検出処理を行って、検出処理の結果に基づくアラート記号と可視画像データとを重畳して表示用画像データを生成する処理を行う。
【0070】
具体的には、処理部130は、領域設定部120により設定された画素密度変更領域ARMDの赤外線画像データに対して画素密度を低減する処理を行う。この画素密度を低減する処理(画素密度低減処理)は、画像データ上で等価的に画素密度、即ち単位面積当たりの画素数を減少させる処理であって、例えば1画面(フレーム)を構成する画像データのうちの一定の領域(画素密度変更領域)内において、隣接する複数の画素に対応する画像データを混合演算して1つの画素に対応する画像データとする処理(画素混合演算処理)である。一方、画素密度変更領域ARMDを除く画像領域(画素密度非変更領域)ARNOの赤外線画像データに対しては、画素密度低減処理を行わない。なお、画素密度低減処理については、後で詳細に説明する。
【0071】
また処理部130は、画素密度変更領域ARMDを含む画像領域の赤外線画像データ、即ち画素密度低減処理を行った後の赤外線画像データに基づいて、対象物の検出処理(テンプレートマッチング処理)を行う。即ち、画素密度変更領域ARMDでは画素密度非変更領域ARNOに比べて画素密度が低い赤外線画像データに基づいて、対象物(例えば歩行者、自転車など)を検出するための検出処理を行う。或いは、画素密度変更領域ARMDでは画素密度が第1のしきい値よりも低く、画素密度非変更領域ARNOでは画素密度が第2のしきい値よりも高い赤外線画像データに基づいて、対象物を検出するための検出処理を行う。ここで、第1のしきい値は第2のしきい値以下の値であって、第2のしきい値は赤外線画像撮像部210において実現可能な画素密度の範囲の値であってもよい。なお、第1、第2のしきい値は、同じ値であってもよい。
【0072】
処理部130は、テンプレートマッチング処理部131、画像合成処理部132、2つのメモリー133、135、混合演算処理部134を含む。メモリー135は、画像取得部110からの赤外線画像データを記憶する。混合演算処理部134は、メモリー135に記憶された赤外線画像データのうちの画素密度変更領域ARMDに対応する画像データに対して、画素混合演算処理を行う。メモリー133は、画素混合演算処理を行った後の赤外線画像データを記憶する。このようにすることで、メモリー133に記憶された赤外線画像データの画素密度変更領域ARMDの画素密度は第1のしきい値よりも低く、画素密度非変更領域ARNOの画素密度は第2のしきい値よりも高くなる。テンプレートマッチング処理部131は、メモリー133に記憶された画素混合演算処理後の赤外線画像データに対して、対象物を検出するためのテンプレートマッチング処理を行う。
【0073】
画像合成処理部132は、テンプレートマッチング処理結果に基づいて、可視画像データにアラート表示(アラート記号)などを重畳する処理を行う。画像合成処理部132は、必要に応じて他の情報をさらに合成(重畳)する処理を行ってもよい。また、画像合成処理部132は、アラート表示を赤外線画像データに重畳する処理を行ってもよいし、或いは可視画像データ、赤外線画像データ及びアラート表示などを合成(重畳)する処理を行ってもよい。
【0074】
赤外線画像撮像部210、可視画像撮像部220、表示部230及び筐体(図示せず)は、第1の構成例(図1)で説明したものと同一であるから、ここでは詳細な説明を省略する。
【0075】
図2に示す第2の構成例の画像処理装置100等によれば、第1の構成例と同様に、テンプレートマッチング処理の対象となる赤外線画像データの画素数を低減させることができるから、検出処理における演算処理負担を低減することができる。また、対象物を検出した場合に、可視画像の対応する位置に視認性の良いアラート表示を重畳して表示することができるから、夜間運転中のドライバーの負担を軽減することなどが可能になる。
【0076】
さらに第1の構成例と同様に、領域設定部120が、車両の走行状況情報や車両位置情報やユーザーによる入力情報などに基づいて、設定パターンを決定し、決定された設定パターンにおいて境界線の画像領域における位置及び形状のうちの少なくとも1つを定めることができる。こうすることで、車両の走行状況などに応じて画素密度変更領域ARMD及び画素密度非変更領域ARNOを可変に設定することができるから、対象物の検出能力(検出精度)を低下させずに、効率の良い画像処理装置等を実現することなどが可能になる。
【0077】
さらに第2の構成例では、画素密度低減処理として画素混合演算処理を行うことができるから、後述するように、画素密度変更領域ARMDにおける感度(赤外線検出感度)の低下を防ぐことができる。
【0078】
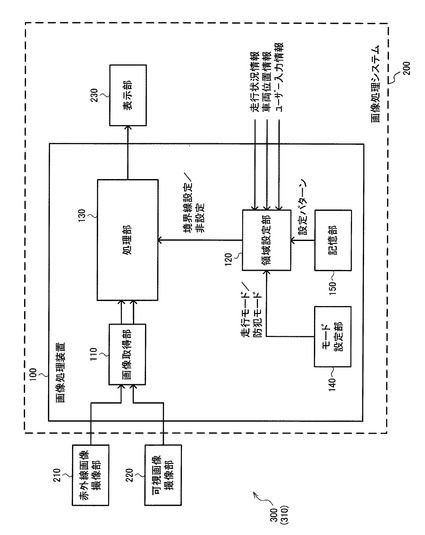
図3に、本実施形態の画像処理装置100、画像処理システム200、カメラ300及びカメラシステム310の第3の構成例を示す。第3の構成例の画像処理装置100は、画像取得部110、領域設定部120、処理部130、モード設定部140を含み、記憶部150をさらに含んでもよい。画像処理システム200は、画像処理装置100及び表示部230を含む。カメラ300は、画像処理装置100、赤外線画像撮像部210、筐体(図示せず)を含み、表示部230をさらに含んでもよい。カメラシステム310は、画像処理装置100及び赤外線画像撮像部210を含み、さらに表示部230を含んでもよい。また、画像処理システム200は、画像取得部110、領域設定部120、処理部130を含む構成としてもよい。
【0079】
なお、本実施形態の画像処理装置100、画像処理システム200、カメラ300及びカメラシステム310は、図3の構成に限定されず、その構成要素の一部を省略したり、他の構成要素に置き換えたり、他の構成要素を追加するなどの種々の変形実施が可能である。
【0080】
画像取得部110、領域設定部120、記憶部150は、第1の構成例(図1)で説明したものと同一であるから、ここでは詳細な説明を省略する。
【0081】
処理部130は、第1の構成例(図1)又は第2の構成例(図2)で説明したものと同一であるから、ここでは詳細な説明を省略する。
【0082】
モード設定部140は、走行モードと防犯モードとのモード切換設定を行う。走行モードは、車両の走行中に設定されるモードであって、例えば車両の夜間走行時などに車両前方の歩行者等を検出してドライバーに警告を発するモードである。また、防犯モードは、車両の駐車中に設定されるモードであって、例えば夜間に車両が自宅に隣接して駐車している時に、自宅への侵入者等を検出して警告を発するモードである。
【0083】
画像処理装置100が走行モードに設定されている場合には、領域設定部120は、上述したように設定パターンを決定し、決定された設定パターンにおいて境界線を決定して画素密度変更領域ARMDを設定する。そして処理部130は画素密度変更領域ARMDの赤外線画像データの画素密度を低減する処理を行い、画素密度変更領域ARMDを含む画像領域の赤外線画像データに基づいて検出処理を行う。そして検出処理の結果に基づくアラート表示を含む表示用画像データを生成する処理を行う。
【0084】
一方、画像処理装置100が防犯モードに設定されている場合には、領域設定部120は境界線を非設定にする。そして処理部130は画像領域の全領域に対して赤外線画像データの画素密度を低減する処理を行い、画像領域の赤外線画像データに基づいて検出処理を行い、検出処理の結果に基づくアラート表示を含む表示用画像データを生成する処理を行う。そして検出処理によって不審者を検出した場合には、処理部130はユーザーの携帯端末などに通報する処理を行うことができる。なお、防犯モードの詳細については、後述する。
【0085】
図3に示す第3の構成例の画像処理装置100等によれば、走行モードに設定された場合には、第1、第2の構成例と同様に、テンプレートマッチング処理の対象となる赤外線画像データの画素数を低減させることができるから、検出処理における演算処理負担を低減することができる。また、対象物を検出した場合に、可視画像の対応する位置に視認性の良いアラート表示を重畳して表示することができるから、夜間運転中のドライバーの負担を軽減することなどが可能になる。
【0086】
さらに第3の構成例では、防犯モードに設定することにより、夜間の駐車時に自宅周辺の不審者などを検出することができるから、防犯用に専用のセキュリティシステム等を設置する必要がなくなるため、防犯コストの低減などが可能になる。
【0087】
図4に、本実施形態のカメラ300の第4の構成例を示す。第4の構成例のカメラ300は、赤外線画像撮像部210、画像取得部110、処理部130を含み、さらに表示部230を含んでもよい。なお、本実施形態のカメラ300は、図4の構成に限定されず、その構成要素の一部を省略したり、他の構成要素に置き換えたり、他の構成要素を追加するなどの種々の変形実施が可能である。
【0088】
赤外線画像撮像部210は、赤外線カメラであって、例えば波長が8〜12μmの遠赤外線に感度を有するものである。遠方(例えば200m先)の対象物を検出するために、焦電素子を用いた赤外線センサーカメラであれば、さらに良い。
【0089】
赤外線画像撮像部210は、赤外線撮像素子が二次元配列された撮像領域を備え、撮像領域の一部の領域IRHDでは赤外線撮像素子の間隔が第1の間隔であり、撮像領域の一部の領域IRHD以外の撮像領域IRLDでは赤外線撮像素子の間隔が第1の間隔より広い第2の間隔である。即ち、撮像領域IRHDでは赤外線画像の画素密度が高く、撮像領域IRLDでは赤外線画像の画素密度がIRHDに比べて低くなる。或いは、撮像領域IRHDの画素密度は第1のしきい値よりも高く、撮像領域IRLDの画素密度は第2のしきい値よりも低い。ここで、第1のしきい値は第2のしきい値以上の値であって、第1、第2のしきい値は共に赤外線画像撮像部210において実現可能な画素密度の範囲の値である。なお、第1、第2のしきい値は、同じ値であってもよい。
【0090】
赤外線撮像素子の間隔とは、例えば赤外線画像撮像部210の撮像面において、1つの画素(赤外線センサー素子)とそれに隣接する画素との配置間隔である。画素密度とは、例えば赤外線画像撮像部210の撮像面における単位面積当たりの画素数である。
【0091】
画像取得部110は、赤外線画像撮像部210で撮像された赤外線画像データを取得し、処理部130に対して赤外線画像データを出力する。
【0092】
処理部130は、画像取得部110により取得された赤外線画像データのうちの撮像領域に対応した画像領域に対して、赤外線画像データに基づいて対象物の検出処理(テンプレートマッチング処理)を行い、検出処理の結果に基づいて表示用画像データを生成する。
【0093】
処理部130は、テンプレートマッチング処理部131及び画像合成処理部132を含む。テンプレートマッチング処理部131は、画像取得部110からの赤外線画像データに基づいて、対象物を検出するためのテンプレートマッチング処理を行う。画像合成処理部132は、テンプレートマッチング処理結果に基づいて、赤外線画像にアラート表示(アラート記号)などを重畳する処理を行う。画像合成処理部132は、必要に応じて他の情報をさらに合成(重畳)する処理を行ってもよい。
【0094】
画像取得部110及び処理部130は、例えばCPUなどのプロセッサーやゲートアレイなどのASICにより実現することができる。
【0095】
図4に示す第4の構成例のカメラ300によれば、赤外線カメラ(赤外線画像撮像部)210により撮像された赤外線画像データに基づいて検出処理(テンプレートマッチング処理)を行って、歩行者などの対象物を検出することができる。この赤外線画像データの画像領域は、画素密度が高い撮像領域IRHDに対応する画像領域と画素密度が低い撮像領域IRLDに対応する画像領域とを含む。こうすることで、赤外線画像データの画素数を低減させることができるから、検出処理における演算処理負担を低減することができる。
【0096】
例えば赤外線画像撮像部210の撮像領域において、歩行者などの対象物が撮像される可能性の高い領域を撮像領域IRHDに設定し、対象物が撮像される可能性が低い領域を撮像領域IRLDに設定することで、対象物の検出能力(検出精度)を低下させずに、演算処理負担を低減することができる。その結果、検出処理の処理時間を短縮したり、処理部130の回路構成を簡素にすることが可能になり、効率の良い制御システムを実現することなどが可能になる。
【0097】
2.画素密度変更領域の設定及び検出処理
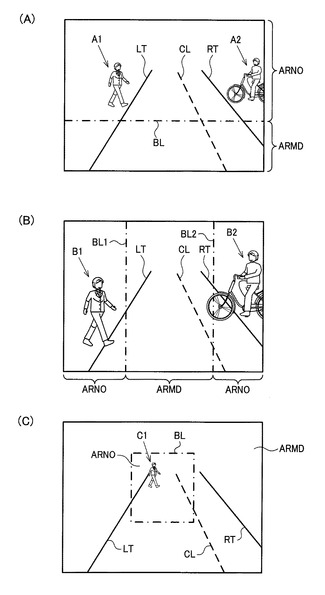
図5(A)〜図5(C)に、3つの走行状況における画素密度変更領域ARMDの設定例を示す。図5(A)は、例えば郊外の道路のように比較的スムーズに走行している状況において、設定パターンが第1の設定パターンに決定された場合の設定例である。図5(B)は、例えば市街地の道路を走行している状況において、設定パターンが第2の設定パターンに決定された場合の設定例である。図5(C)は、例えば山間部のように交通量の少ない道路を走行している状況において、設定パターンが第3の設定パターンに決定された場合の設定例である。図5(A)〜図5(C)は、各走行状況における赤外線画像の1フレーム(画面)であり、道路の左端LT、道路の右端RT、センターラインCLを示す。
【0098】
以下の説明において、車両に取り付けられた赤外線画像撮像部210(赤外線カメラ)からの赤外線画像において、鉛直方向(重力の方向)を「垂直方向」とし、鉛直方向と直交する方向を「水平方向」とする。或いは、道路面に対して垂直な方向を「垂直方向」とし、道路面に対して平行な方向を「水平方向」としてもよい。また、鉛直上向きを「上」、鉛直下向きを「下」とし、画像に向かって右手水平方向を「右」、左手水平方向を「左」とする。
【0099】
図5(A)の第1の設定パターンの場合には、領域設定部120は、赤外線画像データに基づく画像領域を分割する境界線BLを用いて画像領域を区画する。例えば、図5(A)に示すように、境界線BLを水平方向に設定する。そして水平方向に設定された境界線BLにより分割された画像領域のうち、上側の画像領域(広義には一方の画像領域)を画素密度非変更領域ARNOに設定し、下側の画像領域(広義には他方の画像領域)を画素密度変更領域ARMDに設定する。
【0100】
図5(A)に示す走行状況では、夜間に肉眼で視認することが難しい遠方(例えば40m以上前方)の歩行者や自転車等を検出することが重要になる。そこで、水平方向に境界線BLを設定し、その境界線BLの上側の領域、即ち遠方の対象物が映し出される領域を画素密度非変更領域ARNOに設定する。一方、境界線BLの下側の領域は、画素密度変更領域ARMDに設定される。こうすることで、例えば道路を横断しようとする歩行者(図5(A)のA1)や自転車に乗った人(図5(A)のA2)を画素密度が高い赤外線画像データを用いて検出することができる。
【0101】
図5(B)の第2の設定パターンの場合には、領域設定部120は、赤外線画像データに基づく画像領域を3分割し互いに交差しない2本の境界線を用いて画像領域を区画する。例えば図5(B)に示すように、2本の境界線BL1、BL2を垂直方向に設定する。そして垂直方向に設定された境界線BL1、BL2により3分割された画像領域のうち、中央の画像領域(広義には2本の境界線で挟まれる画像領域)を画素密度変更領域ARMDに設定する。
【0102】
図5(B)に示す走行状況では、対向車のヘッドライトにより幻惑されやすい近距離において、道路脇から飛び出してくる歩行者や自転車等を検出することが重要になる。そこで、垂直方向に第1、第2の境界線BL1、BL2を設定し、第1の境界線BL1の左側の領域と第2の境界線BL2の右側の領域とを共に画素密度非変更領域ARNOに設定する。一方、2つの境界線BL1、BL2に挟まれた領域、即ち中央の領域は、画素密度変更領域ARMDに設定される。こうすることで、例えば車両の直前を横断しようとする歩行者(図5(B)のB1)や自転車に乗った人(図5(B)のB2)を画素密度が高い赤外線画像データを用いて検出することができる。
【0103】
図5(C)の第3の設定パターンの場合には、領域設定部120は、赤外線画像データに基づく画像領域において一部の領域を囲む閉曲線を境界線として用いて画像領域を区画する。例えば図5(B)に示すように、閉曲線である境界線BLを画像領域の中央部に設定する。そして閉曲線の外側の画像領域を画素密度変更領域ARMDに設定する。ここで閉曲線とは、閉じた図形であればよく、例えば多角形であってもよい。
【0104】
図5(C)に示す走行状況では、車両速度が速いことを考慮して、より遠方(例えば100m以上前方)の対象物を検出することが重要になる。そこで、画面の中央部などの限定された領域を画素密度非変更領域ARNOに設定し、それ以外の領域(画面の周辺部)を画素密度変更領域ARMDに設定する。こうすることで、例えば車両の遠方を横断しようとする歩行者(図5(C)のC1)等を画素密度が高い赤外線画像データを用いて検出することができる。
【0105】
なお、境界線の位置は固定ではなく、例えば車両の速度情報やヘッドライトの制御情報などに基づいて可変に設定することができる。具体的には、例えば図5(A)において、車両速度が速いほど境界線の位置を画面の上方にシフトさせてもよいし、或いは、ヘッドライトをハイビームに切り換えた時に、境界線の位置を画面の上方にシフトさせ、ロービームに切り換えた時に、境界線の位置を画面の下方にシフトさせてもよい。
【0106】
また、ユーザー(ドライバー)による入力情報に基づいて、境界線の位置、形状等を可変に設定することもできる。具体的には、ドライバーが交通状況に応じて境界線設定情報を入力することにより、例えば図5(B)において、2つの境界線BL1、BL2の位置を左方又は右方にシフトさせたり、例えば図5(C)において、画面中央部の閉曲線(境界線)BLの位置又は大きさを変化させたりすることができる。
【0107】
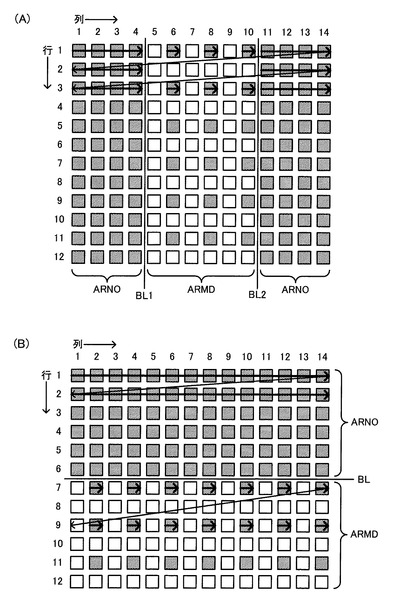
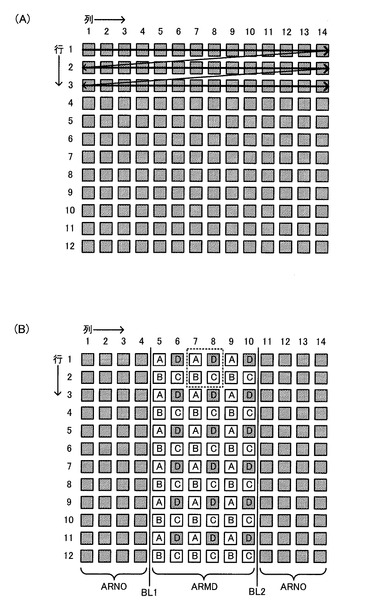
図6(A)、図6(B)、図7は、画像処理装置100の第1の構成例(図1)による画素密度低減処理(画素の間引き処理)を説明する図である。これらの図では、赤外線画像撮像部210から取得された1画面(フレーム)分の赤外線画像データが、12行×14列の画素に対応する場合を例として説明する。なお、以下の説明では、例えば第2行第3列の画素をP(2,3)と表記する。また、画素P(2,3)の画像データを読み出し、その画像データをメモリー133に記憶することを、便宜的に「P(2,3)を読み出す」と表記する。
【0108】
図6(A)は、垂直方向に設定された2つの境界線BL1、BL2により分割された領域のうち、左側の領域と右側の領域とを共に画素密度非変更領域ARNOに設定し、中央の領域(2つの境界線BL1、BL2により挟まれた領域)を画素密度変更領域ARMDに設定する場合である。処理部130は、以下のように画素の間引き処理を行ってメモリー133に画像データを記憶する。なお、境界線BL1、BL2の位置は、図示したものに限定されず、他の位置に設定されてもよい。
【0109】
処理部130は、第1行の画素P(1,1)からP(1,4)までを順番に読み出す。次にP(1,5)を読み出さずにスキップして、P(1,6)を読み出す。次にP(1,7)を読み出さずにスキップして、P(1,8)を読み出す。次にP(1,9)を読み出さずにスキップして、P(1,10)を読み出す。そしてP(1,11)からP(1,14)までを順番に読み出す。次に第2行の画素については、P(2,1)〜P(2,4)を読み出し、P(2,5)〜P(2,10)をスキップし、P(2,11)〜P(2,14)を読み出す。そして第3行の画素については、1行目と同様に、P(3,1)〜P(3,4)、P(3,6)、P(3,8)、P(3,10)、P(3,11)〜P(3,14)を読み出し、これ以外の画素をスキップする。第4行以降についても、上記と同様に画素の間引き処理を行う。
【0110】
このようにすることで、図6(A)に示すように、画素密度非変更領域ARNOについては画素が間引かれず、画素密度変更領域ARMDについては画素数が1/4に減少し、即ち画素密度が1/4に低減される。図6(A)で網掛けされた画素に対応する画像データがメモリー133に記憶される。
【0111】
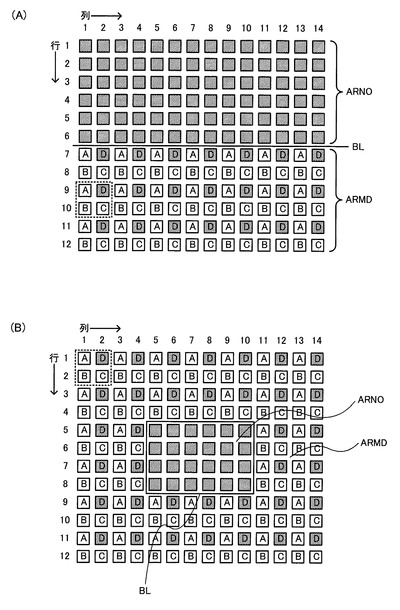
図6(B)は、水平方向に設定された境界線BLの上側の領域を画素密度非変更領域ARNOに設定し、境界線BLの下側の領域を画素密度変更領域ARMDに設定する場合である。処理部130は、以下のように画素の間引き処理を行ってメモリー133に画像データを記憶する。なお、境界線BLの位置は、図示したものに限定されず、他の位置に設定されてもよい。
【0112】
処理部130は、画素密度非変更領域ARNOについては、間引き処理を行わずに第1行から第6行までの画素を順番に読み出す。そして画素密度変更領域ARMDについては、奇数行では1つおきに画素を読み出し、偶数行では全ての画素をスキップする。例えば第7行では、P(7,2)、P(7,4)、P(7,6)、P(7,8)、P(7,10)、P(7,12)、P(7,14)が読み出され、第8行では全ての画素がスキップされる。
【0113】
このようにすることで、図6(B)に示すように、画素密度非変更領域ARNOについては画素が間引かれず、画素密度変更領域ARMDについては画素数が1/4に減少し、即ち画素密度が1/4に低減される。図6(B)で網掛けされた画素に対応する画像データがメモリー133に記憶される。
【0114】
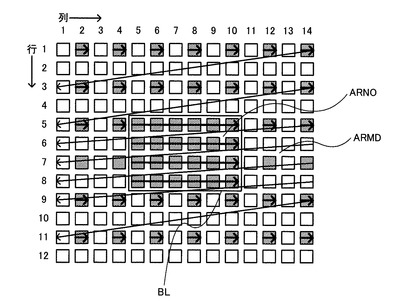
図7は、中央部に設定された境界線BLに取り囲まれた領域を画素密度非変更領域ARNOに設定し、中央部に設定された境界線BLの外側の領域を画素密度変更領域ARMDに設定する場合である。処理部130は、以下のように画素の間引き処理を行ってメモリー133に画像データを記憶する。なお、境界線BLの位置は、図示したものに限定されず、他の位置に設定されてもよい。
【0115】
処理部130は、画素密度非変更領域ARNOについては、全ての画素を読み出す。そして画素密度変更領域ARMDについては、奇数行では1つおきに画素を読み出し、偶数行では全ての画素をスキップする。例えば第1行では、P(1,2)、P(1,4)、P(1,6)、P(1,8)、P(1,10)、P(1,12)、P(1,14)が読み出され、第2行では全ての画素がスキップされる。第5行では、P(5,2)、P(5,4)、P(5,5)〜P(5,10)、P(5,12)、P(5,14)が読み出される。
【0116】
このようにすることで、図7に示すように、画素密度非変更領域ARNOについては画素が間引かれず、画素密度変更領域ARMDについては画素数が1/4に減少し、即ち画素密度が1/4に低減される。図7で網掛けされた画素に対応する画像データがメモリー133に記憶される。
【0117】
図8(A)、図8(B)、図9(A)、図9(B)は、画像処理装置100の第2の構成例(図2)による画素密度低減処理(画素混合演算処理)を説明する図である。これらの図では、赤外線画像撮像部210から取得された1画面(フレーム)分の赤外線画像データが、12行×14列の画素に対応する場合を例として説明する。なお、以下の説明では、例えば第2行第3列の画素をP(2,3)と表記する。
【0118】
図8(A)に示すように、始めに処理部130は、全ての画素を読み出して、画像データをメモリー135に記憶する。そして以下に説明するように、画素混合演算処理を行って、その結果をメモリー133に記憶する。
【0119】
図8(B)は、垂直方向に設定された2つの境界線BL1、BL2により分割された領域のうち、左側の領域と右側の領域とを共に画素密度非変更領域ARNOに設定し、中央の領域(2つの境界線BL1、BL2により挟まれた領域)を画素密度変更領域ARMDに設定する場合である。なお、境界線BL1、BL2の位置は、図示したものに限定されず、他の位置に設定されてもよい。
【0120】
処理部130は、画素密度非変更領域ARNOについては画素混合演算処理を行わずに、画像データをそのままメモリー133に記憶する。一方、画素密度変更領域ARMDについては、4つの画素の画像データを混合演算処理し、その結果を1つの画素の画像データとしてメモリー133に記憶する。例えば、4つの画素P(1,7)、P(2,7)、P(1,8)、P(2,8)について画像データを混合演算処理し、その結果を1つの画素P(1,8)の画像データとしてメモリー133に記憶する。図8(B)では、混合演算処理の単位となる4つの画素をA、B、C、Dで示し、処理結果を画素Dの画像データとしてメモリー133に記憶する。このようにすることで、画素密度非変更領域ARNOについては画素密度が変化せず、画素密度変更領域ARMDについては画素数が1/4に減少し、即ち画素密度が1/4に低減される。
【0121】
図9(A)は、水平方向に設定された境界線BLの上側の領域を画素密度非変更領域ARNOに設定し、境界線BLの下側の領域を画素密度変更領域ARMDに設定する場合である。なお、境界線BLの位置は、図示したものに限定されず、他の位置に設定されてもよい。
【0122】
この場合も図8(B)と同様に、処理部130は、画素密度非変更領域ARNOについては画素混合演算処理を行わずに、画像データをそのままメモリー133に記憶する。一方、画素密度変更領域ARMDについては、4つの画素の画像データを混合演算処理し、その結果を1つの画素の画像データとしてメモリー133に記憶する。例えば、4つの画素P(9,1)、P(10,1)、P(9,2)、P(10,2)について画像データを混合演算処理し、その結果を1つの画素P(9,2)の画像データとしてメモリー133に記憶する。このようにすることで、画素密度非変更領域ARNOについては画素密度が変化せず、画素密度変更領域ARMDについては画素数が1/4に減少し、即ち画素密度が1/4に低減される。
【0123】
図9(B)は、中央部に設定された境界線BLに取り囲まれた領域を画素密度非変更領域ARNOに設定し、中央部に設定された境界線BLの外側の領域を画素密度変更領域ARMDに設定する場合である。なお、境界線BLの位置は、図示したものに限定されず、他の位置に設定されてもよい。
【0124】
この場合も図8(B)、図9(A)と同様に、処理部130は、画素密度非変更領域ARNOについては画素混合演算処理を行わずに、画像データをそのままメモリー133に記憶する。一方、画素密度変更領域ARMDについては、4つの画素の画像データを混合演算処理し、その結果を1つの画素の画像データとしてメモリー133に記憶する。例えば、4つの画素P(1,1)、P(2,1)、P(1,2)、P(2,2)について画像データを混合演算処理し、その結果を1つの画素P(1,2)の画像データとしてメモリー133に記憶する。このようにすることで、画素密度非変更領域ARNOについては画素密度が変化せず、画素密度変更領域ARMDについては画素数が1/4に減少し、即ち画素密度が1/4に低減される。
【0125】
以上説明した画素混合演算処理によれば、4つの画素A、B、C、Dの画像データを混合して1つの画素Dの画像データとするから、1つの画素Dの感度を等価的に4倍にすることになる。従って、画素密度変更領域ARMDにおいて、画素密度が1/4になっても、単位面積当たりの感度(赤外線検出感度)は変化しない。
【0126】
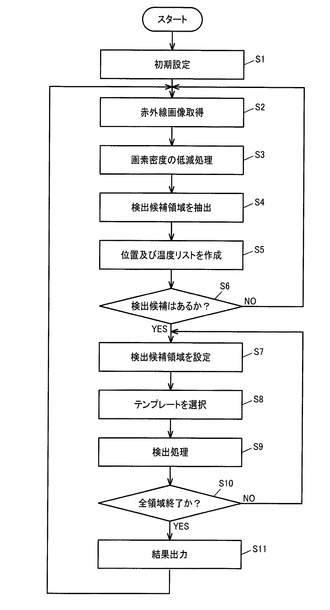
図10は、本実施形態の画像処理装置100等における検出処理(テンプレートマッチング処理)のフローチャートである。このテンプレートマッチング処理は、処理部130に含まれるテンプレートマッチング処理部131により実行される。
【0127】
最初のステップS1で、処理に必要なパラメーターの初期設定を行う。次のステップS2で、画像取得部110が赤外線カメラ(赤外線画像撮像部)210からの赤外線画像を取得する。そして次のステップ3では、領域設定部120からの境界線設定情報に基づいて、赤外線画像(熱画像)データの1フレーム(1画面)分のデータ毎に画素密度変更領域ARMDが設定され、画素密度変更領域ARMDの画像データに対して画素密度の低減処理が実行される。なお、カメラ300の第4の構成例(図4)の場合には、赤外線画像撮像部210から取得された画像データが、画素密度が高い撮像領域IRHDに対応する画像領域と画素密度が低い撮像領域IRLDに対応する画像領域とを含むから、このステップ3を省略してもよい。
【0128】
次にステップS4では、画素密度低減処理後の赤外線画像データから検出候補領域を抽出する。具体的には、対象物の特徴を表す温度領域を塊として抽出する。ここでは例として、先行車両及び歩行者(人物)を検出対象とする場合について説明する。これ以外のものを検出の対象とする場合には、その対象が有する温度情報を特徴量として、それぞれ本ステップにおいて処理対象に加えればよい。
【0129】
先行車両の場合は、マフラー領域が100°C程度の高温になることを利用して、赤外線画像中から例えば80°C以上の温度情報を有する領域を探索して、その領域の位置情報と温度情報を検出する。
【0130】
一方、歩行者の場合は、露出している顔及び首の表面温度が30°C程度の中温になることを利用して、熱画像中から例えば30°C程度の温度情報を有する領域を探索して、その領域の位置情報と温度情報を検出する。ここで、各領域で検出される結果のうち、位置情報としては例えば塊の重心座標位置とすればよく、温度情報としては例えば塊の平均温度とすればよい。また重心座標位置以外に、縦横比、充足率、実面積などの条件を満たす部位の存在を調べる。これによって、歩行者の存在位置を画面上の2次元座標上で画面全体の幅と高さに対する割合で求める。
【0131】
そして、ステップS5では、ステップS4で得られた各領域の位置情報と温度情報を対応付けした位置及び温度リストを作成して以降の処理に進む。
【0132】
次のステップS6では、ステップS5で作成したリストに基づいて、検出候補があるか否か、即ち検出対象である先行車や歩行者の特徴量を示す温度情報が抽出されているか否かを判断する。リスト内に対象物の候補が1つも抽出されていない場合には、今回の赤外線画像の中には検出対象である先行車や歩行者が存在しないものと判断して、次のフレーム(画面)の処理のためにステップS2に戻る。
【0133】
一方、リスト内に対象物の候補が1つ以上抽出されている場合には、次のステップS7で検出候補領域(存在候補領域)を設定し、続くステップS8で、ステップS5で作成したリストの温度情報に基づいて、以降の処理で用いるためのテンプレート候補を選択する。具体的には、その検出候補領域の平均温度情報±ΔTの範囲内の値を持つテンプレートを、1つの検出候補領域内での対象物検出に用いるテンプレート候補とする。
【0134】
例えば、先行車存在候補領域に用いるテンプレートとして選択されるのは、温度情報が100±3°Cのテンプレートである。但し、高温部分については、通常の走行環境内では特殊な存在であるため、予め例えば80°C以上の領域をテンプレートとして選択してもよい。一方、歩行者存在候補領域に用いるテンプレートとして選択されるのは、温度情報が28±3°Cのテンプレートである。高温部分については、外気温の影響等を考えると、同一の物体でも所定の範囲では温度が変化することを考慮する必要がある。また、上記の例では中温情報を有する対象物を歩行者としているが、例えば動物(犬等)と区別するためには、本ステップで動物のテンプレートも候補として選択される。
【0135】
このようにして検出候補領域毎に最適なテンプレートを決定し、次のステップS9では決定されたテンプレートを用いて、検出処理(テンプレートマッチング処理)を行う。即ち、赤外画像中でテンプレートマッチング処理を行い、各検出候補領域内での最終的な対象物の有無及びその位置を検出する。本ステップでは、先行車存在候補領域から先行車を検出する場合には、車体テンプレートを用いて、先行車存在候補領域と車体テンプレートでの濃度値(濃淡値)の相関演算によって先行車両の有無とその詳細な位置を検出する。また、歩行者存在候補領域から歩行者を検出する場合には、歩行者存在候補領域と人テンプレートでの濃度値の相関演算によって歩行者の有無とその詳細な位置を検出する。
【0136】
なお、上記の説明では、テンプレートマッチング処理時にテンプレートマッチング処理を濃度値での相関演算で行っているが、本実施形態の画像処理装置100等は、これに限定されるものではなく、例えばエッジ画像をテンプレートとして持っておき、この相関値で最終的な対象物の有無とその位置を検出するようにしてもよい。
【0137】
次に、ステップS10では、ステップS5で作成されたリストにある検出候補領域の全てに対して検出処理が行われたかどうかを判断する。全ての検出候補領域に対して処理が終了していなければ、処理領域を切り替えるために、ステップS7に戻り、次の検出候補領域の設定を行う。リストにある領域の全てについて処理が終了していれば、それまでの処理結果を出力するために次のステップS11へ進む。
【0138】
ステップS11では、テンプレートマッチング処理部131が上述した検出結果を画像合成処理部132に出力する。対象物が検出された場合には、画像合成処理部132は、アラート表示を可視画像に重畳する処理を行って、表示部230に出力する。
【0139】
本実施形態の画像処理装置100等によれば、処理部130は、画素密度変更領域ARMDと画素密度変更領域以外の領域(即ち、画素密度非変更領域ARNO)とでは、対象物を検出するための検出処理の内容を異ならせることができる。具体的には、例えばステップS8のテンプレート選択において、画素密度非変更領域ARNOの検出候補領域に対しては精度(解像度)の高いテンプレートを選択し、画素密度変更領域ARMDの検出候補領域に対しては精度(解像度)の低いテンプレートを選択することができる。こうすることで、画素密度非変更領域ARNOに対しては精度の高い検出処理が可能になり、画素密度変更領域ARMDに対しては、精度は低下するが処理時間を短縮することができるから、より効率的な検出処理(テンプレートマッチング処理)を行うことができる。
【0140】
また本実施形態の画像処理装置100等によれば、処理部130は、画素密度変更領域以外の領域(画素密度非変更領域ARNO)での検出処理の結果に基づいて、画素密度変更領域ARMDでの検出処理を行うことができる。具体的には、処理部130は、画素密度非変更領域ARNOでの検出処理で得られた対象物の動きベクトルに基づいて、画素密度変更領域ARMDでの検出処理を行うことができる。この動きベクトルは、例えば歩行者など対象物が移動する場合に、対象物が移動する速さ及び方向を表すベクトルである。
【0141】
例えば、図5(B)のB1に示すように、画素密度非変更領域ARNOで歩行者が検出された場合に、この歩行者の動きベクトルが右方向に向いている時には、処理部130は、この動きベクトルに基づいて歩行者が画素密度変更領域ARMDに移動することを予測できる。そして予め歩行者の移動先に歩行者存在候補領域を設定し、人テンプレートを選択しておくことができる。こうすることで、画素密度変更領域ARMDでの歩行者の検出処理時間を短縮することができる。
【0142】
さらに本実施形態の画像処理装置100等によれば、処理部130は、画素密度非変更領域ARNOで対象物が検出され、対象物が画素密度変更領域ARMDに移動すると予測された場合には、画素密度変更領域ARMDにおいて、予測されない場合に比べて画素密度が高い赤外線画像データに基づいて、検出処理を行うことができる。
【0143】
画素密度非変更領域ARNOで対象物が検出された場合に、対象物が画素密度変更領域ARMDに移動するか否かの予測は、例えばその対象物の動きベクトルなどに基づいて、処理部130の判定処理により実行される。
【0144】
例えば、図5(B)のB1に示すように、画素密度非変更領域ARNOで歩行者が検出され、右方向への動きベクトルなどに基づいて、歩行者が画素密度変更領域ARMDに移動することを予測する判定処理が行われた場合には、処理部130は、画素密度変更領域ARMDの赤外線画像データに対して画素密度低減処理を行わない(省略する)ことができる。こうすることで、画素密度変更領域ARMDに移動した対象物(歩行者など)に対しても、画素密度非変更領域ARNOと同じ画素密度(広義には対象物が画素密度変更領域ARMDに移動すると予測されない場合に比べて高い画素密度)を有する赤外線画像データに基づいて検出処理を行うことができるから、より正確に対象物の位置を検出することができる。
【0145】
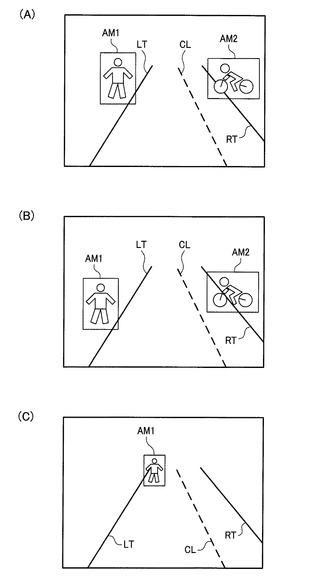
図11(A)〜図11(C)に、3つの走行状況におけるアラート表示の例を示す。図11(A)〜図11(C)は、表示部230に表示された画像を示し、上述した第1の走行状況(図5(A))、第2の走行状況(図5(B))、第3の走行状況(図5(C))にそれぞれ対応する。
【0146】
図11(A)に示すように、歩行者及び自転車に乗っている人が検出された位置に、歩行者及び自転車の存在をドライバーに知らせるためのアラート記号AM1、AM2が可視画像に重畳されて表示される。
【0147】
図11(B)では、歩行者が検出された位置に、歩行者の存在を知らせるためのアラート記号AM1が可視画像に重畳されて表示され、また自転車が検出された位置に、自転車の存在を知らせるためのアラート記号AM2が可視画像に重畳されて表示される。
【0148】
図11(C)では、中央部の歩行者が検出された位置に、歩行者の存在を知らせるためのアラート記号AM1が可視画像に重畳されて表示される。
【0149】
3.防犯モード
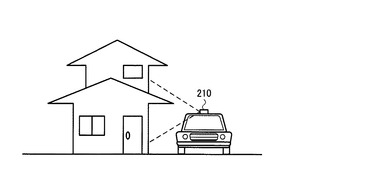
図12は、本実施形態の画像処理装置100等の第3の構成例(図3)における防犯モードを説明する図である。図12に示すように、例えば夜間に自家用車を自宅近くに駐車する場合などに、画像処理装置100等を防犯モードに設定することにより、夜間の自宅への不審者の侵入などを検出することができる。走行モードと防犯モードとの切換は、モード設定部140が行う。
【0150】
具体的には、車両のルーフ等に設けた赤外線画像撮像部(赤外線カメラ)210により自宅の周囲の赤外線画像を所定の時間間隔で撮像する。防犯モードに設定されている場合には、領域設定部120は境界線を非設定にし、処理部130は赤外線画像領域の全領域に対して赤外線画像データの画素密度を低減する処理を行う。そして処理部130は、画像領域の赤外線画像データに基づいて検出処理を行い、検出処理の結果に基づくアラート表示を含む表示用画像データを生成する処理を行う。処理部130は、検出処理によって不審者を検出した場合には、例えばユーザーの携帯端末などに通報する処理を行うことができる。
【0151】
防犯モードでは、走行モードに比べて、対象物の位置検出について高い精度は要求されない。不審者の存在を検出できればよいからである。従って、画像領域の全領域に対して画素密度を低減する処理を行うことで、検出処理における演算処理負担を低減することができる。その結果、防犯モードでの消費電力を低減することができるから、駐車時のバッテリーの消費を抑えることができる。
【0152】
なお、赤外線カメラ210をルーフレール等に設けて、赤外線カメラ210の位置を移動させたり、或いは赤外線カメラ210を回転できる台座に設けることで、赤外線カメラ210の光軸方向を可変に設定することができる。こうすることで、不審者が侵入するおそれがある方向に赤外線カメラ210の光軸方向を設定することなどが可能になる。
【0153】
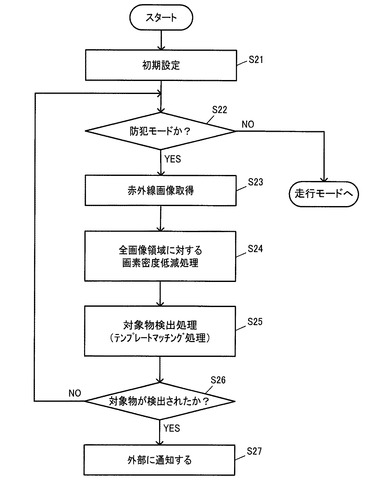
図13は、第3の構成例(図3)による防犯モードの処理のフローチャートである。この処理は画像取得部110及び処理部130により実行される。
【0154】
最初のステップS21で、処理に必要なパラメーターの初期設定を行う。次のステップS22で、設定されているモードが走行モードであるか、或いは防犯モードであるかを判断する。防犯モードに設定されている場合には、次のステップS23が実行される。一方、走行モードに設定されている場合には、上述した走行モードのフローチャート(図10)のステップS2以降の処理が実行される。
【0155】
ステップS23では、画像取得部110が赤外線カメラ(赤外線画像撮像部)210からの赤外線画像データを取得する。そして次のステップS24では、処理部130が赤外線画像データの画像領域の全領域に対して画素密度を低減する処理を行い、続いてステップS25で対象物の検出処理(テンプレートマッチング処理)を実行する。この検出処理は、既に説明した図10のステップS4〜S10と同様の処理であるから、ここでは詳細な説明を省略する。なお、防犯モードでは、走行モードに比べて、対象物の位置検出について高い精度が要求されないから、精度(解像度)の低いテンプレートを選択することができる。
【0156】
検出処理が終了するとステップS26に進み、対象物が検出されたか否かを判断する。対象物が検出された場合には、ステップS27で例えばユーザーの携帯端末など外部に通知する処理を行う。
【0157】
対象物が検出されない場合には、ステップS22に戻る。引き続き防犯モードに設定されている場合には、前回の赤外線画像データの取得時から一定時間経過後に、ステップS23で次の赤外線画像データを取得する。一定の時間間隔で赤外線画像データを取得することで、消費電力を低減することができるから、駐車時のバッテリーの消費を抑えることができる。
【0158】
このように本実施形態の画像処理装置100等の第3の構成例によれば、防犯モードに設定することにより、夜間の駐車時に自宅周辺の不審者などを検出することができるから、防犯用に専用のセキュリティシステム等を設置する必要がなくなるため、防犯コストの低減などが可能になる。また、防犯モードでは消費電力を低減することができるから、駐車時のバッテリーの消費を抑えることができる。
【0159】
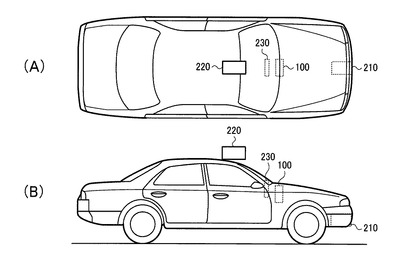
4.カメラシステム
図14(A)、図14(B)に、本実施形態のカメラシステム310の車両への搭載例を示す。図14(A)、図14(B)に示すカメラシステム310は、画像処理装置100、赤外線画像撮像部210、可視画像撮像部220、表示部230を含む。なお、本実施形態のカメラシステム310は、図14(A)、図14(B)の構成に限定されず、その構成要素の一部を省略したり、他の構成要素に置き換えたり、他の構成要素を追加するなどの種々の変形実施が可能である。
【0160】
図14(A)は車両を上から見た平面図であり、図14(B)は車両の側面図である。赤外線画像撮像部(赤外線カメラ)210は、例えば車両のバンパー部分に設けられ、可視画像撮像部(可視カメラ)220は、例えば車両のルーフに設けられる。画像処理装置100は、ダッシュボードなどのドライバーが操作しやすい位置に設けられ、表示部230はドライバーが視認しやすい位置に設けられる。なお、これら構成要素の搭載位置は、図示される位置に限定されず、例えば赤外線画像撮像部(赤外線カメラ)210をルーフに設けてもよい。また、表示部230は、ヘッドアップディスプレイであってもよい。
【0161】
なお、以上のように本実施形態について詳細に説明したが、本発明の新規事項及び効果から実体的に逸脱しない多くの変形が可能であることは当業者には容易に理解できるであろう。従って、このような変形例は全て本発明の範囲に含まれるものとする。例えば、明細書又は図面において、少なくとも一度、より広義又は同義な異なる用語と共に記載された用語は、明細書又は図面のいかなる箇所においても、その異なる用語に置き換えることができる。また画像処理装置、画像処理システム、カメラ及びカメラシステムの構成、動作も本実施形態で説明したものに限定されず、種々の変形実施が可能である。
【符号の説明】
【0162】
100 画像処理装置、110 画像取得部、120 領域設定部、130 処理部、
131 テンプレートマッチング処理部、132 画像合成処理部、133 メモリー、
134 混合演算処理部、135 メモリー、140 モード設定部、150 記憶部、
200 画像処理システム、210 赤外線画像撮像部、220 可視画像撮像部、
230 表示部、300 カメラ、310 カメラシステム、
ARMD 画素密度変更領域、ARNO 画素密度非変更領域、BL 境界線
【技術分野】
【0001】
本発明は、画像処理装置、画像処理システム、カメラ及びカメラシステム等に関する。
【背景技術】
【0002】
ドライバーにとって車外からの視覚情報は運転操作上きわめて重要である。しかしながら、夜間の低照度環境や対向車のライトのような強力な光源の存在によって眩惑されるような環境で運転しなければならない場合も多い。このような肉眼での視認性が悪い環境では、注意深いドライバーにとっても自車に接近する歩行者などの対象物の発見が遅れがちである。
【0003】
このようなドライバー側の生理学的な問題をカバーするための技術として、赤外線カメラ及び可視カメラにより得られた画像から歩行者等を検出し、画像を加工して表示する手法が、特許文献1に開示されている。
【0004】
しかしながらこの手法では、対象物を検出するための検出処理の演算処理負荷が大きくなるために、検出時間が長くなる、検出装置が高価になるなどの問題がある。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2008−236349号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
本発明の幾つかの態様によれば、対象物を効率良く検出することができる画像処理装置、画像処理システム、カメラ及びカメラシステム等を提供できる。
【課題を解決するための手段】
【0007】
本発明の一態様は、赤外線画像データを取得する画像取得部と、前記画像取得部により取得された前記赤外線画像データに基づく画像領域に対して、前記画像領域を複数の領域に分割する境界線を設定し、前記境界線によって分割された複数の領域のうちの少なくとも1つの領域を画素密度変更領域に設定する領域設定部と、前記画素密度変更領域の前記赤外線画像データの画素密度を低減する処理を行い、前記画素密度変更領域を含む前記画像領域の前記赤外線画像データに基づいて対象物の検出処理を行い、前記検出処理の結果に基づいて表示用画像データを生成する処理部とを含む画像処理装置に関係する。
【0008】
本発明の一態様によれば、赤外線画像データ基づく画像領域に対して、例えば歩行者などの対象物が存在する可能性の低い領域を画素密度変更領域に設定し、その領域の赤外線画像データの画素密度を低減することができる。こうすることで、対象物の検出能力などを低下させずに、検出処理にかかる演算処理負担を低減することができる。その結果、検出時間を短縮したり、処理部の構成を簡素にすることなどが可能になり、効率の良い画像処理装置を実現することなどが可能になる。
【0009】
また本発明の一態様では、前記領域設定部は、前記画像領域における位置及び形状のうちの少なくとも1つが可変に設定される前記境界線を用いて前記画像領域を区画する設定パターンを決定し、決定された前記設定パターンにおいて前記境界線の前記画像領域における位置及び形状のうちの少なくとも1つを定めてもよい。
【0010】
このようにすれば、領域設定部は、決定された設定パターンにおいて境界線の画像領域における位置及び形状のうちの少なくとも1つを可変に設定することができるから、例えば車両の走行状況などに応じて適切な画素密度変更領域を設定することができる。
【0011】
また本発明の一態様では、前記領域設定部は、前記画像領域を分割する前記境界線を用いて前記画像領域を区画する第1の設定パターンを決定可能に備え、決定された前記設定パターンが前記第1の設定パターンである場合には、前記境界線により分割された画像領域のうち、一方の画像領域を前記画素密度変更領域に設定してもよい。
【0012】
このようにすれば、例えば郊外の道路のように、車両が比較的スムーズに走行している状況などでは、第1の設定パターンにより画像領域を分割することで、対象物が存在する可能性が低い境界線の下側の画像領域を画素密度変更領域に設定することができる。その結果、対象物の検出能力等を低下させずに、検出処理にかかる演算処理負担を低減することができる。
【0013】
また本発明の一態様では、前記領域設定部は、前記画像領域を3分割し互いに交差しない2本の前記境界線を用いて前記画像領域を区画する第2の設定パターンを決定可能に備え、決定された前記設定パターンが前記第2の設定パターンである場合には、前記境界線により3分割された画像領域のうち、前記2本の境界線で挟まれる画像領域を前記画素密度変更領域に設定してもよい。
【0014】
このようにすれば、例えば車両が市街地の道路を走行している状況などでは、第2の設定パターンにより画像領域を3分割することで、対象物が存在する可能性が低い2本の境界線で挟まれる画像領域を画素密度変更領域に設定することができる。その結果、対象物の検出能力等を低下させずに、検出処理にかかる演算処理負担を低減することができる。
【0015】
また本発明の一態様では、前記領域設定部は、前記画像領域において一部の領域を囲む閉曲線を前記境界線として用いて前記画像領域を区画する第3の設定パターンを決定可能に備え、決定された前記設定パターンが前記第3の設定パターンである場合には、前記閉曲線の外側の前記画像領域を前記画素密度変更領域に設定してもよい。
【0016】
このようにすれば、例えば山間部のように、車両が交通量の少ない道路を走行している状況などでは、第3の設定パターンにより閉曲線で画像領域を区画し、対象物が存在する可能性が低い閉曲線の外側の画像領域を画素密度変更領域に設定することができる。その結果、対象物の検出能力等を低下させずに、検出処理にかかる演算処理負担を低減することができる。
【0017】
また本発明の一態様では、前記表示用画像データは、前記検出処理の結果に基づくアラート表示を含んでもよい。
【0018】
このようにすれば、視認性の良いアラート記号を表示することで、ドライバーの危険予知を容易にすることができる。
【0019】
また本発明の一態様では、前記赤外線画像データは、車両の外部領域の赤外線画像の画像データであり、前記領域設定部は、前記車両の走行状況情報に基づいて、前記設定パターンを決定し、決定された前記設定パターンにおいて前記境界線の前記画像領域における位置及び形状のうちの少なくとも1つを定めてもよい。
【0020】
このようにすれば、領域設定部は、車両の走行状況に基づいて画素密度変更領域を設定することができるから、例えば車両の速度などに応じて歩行者等の対象物が存在する可能性が高い領域を除いた画像領域を画素密度変更領域として設定することなどが可能になる。
【0021】
また本発明の一態様では、前記車両の走行状況情報は、前記車両の速度情報であってもよい。
【0022】
このようにすれば、例えば車両速度が速いほど、より遠方の対象物を効率良く検出できるように画素密度変更領域を設定し、また車両速度が遅いほど、より近くの対象物を効率良く検出できるように画素密度変更領域を設定することなどが可能になる。
【0023】
また本発明の一態様では、前記領域設定部は、ユーザーによる入力情報に基づいて、前記設定パターンを決定し、決定された前記設定パターンにおいて前記境界線の前記画像領域における位置及び形状のうちの少なくとも1つを定めてもよい。
【0024】
このようにすれば、ユーザーが車両の走行状況や道路状況などを判断して、適切な画素密度変更領域を設定することができる。
【0025】
また本発明の一態様では、走行モードと防犯モードとのモード切換設定を行うモード設定部をさらに含み、前記走行モードに設定されている場合には、前記領域設定部は、前記画素密度変更領域を設定し、前記処理部は、前記画素密度変更領域の前記赤外線画像データの画素密度を低減する処理を行い、前記画素密度変更領域を含む前記画像領域の前記赤外線画像データに基づいて前記検出処理を行い、前記検出処理の結果に基づくアラート表示を含む表示用画像データを生成する処理を行い、前記防犯モードに設定されている場合には、前記領域設定部は、前記境界線を非設定にし、前記処理部は、前記画像領域の全領域に対して前記赤外線画像データの画素密度を低減する処理を行い、前記画像領域の前記赤外線画像データに基づいて前記検出処理を行い、前記検出処理の結果に基づくアラート表示を含む表示用画像データを生成する処理を行ってもよい。
【0026】
このようにすれば、車両の走行時には、モード設定部が走行モードに設定することにより、例えば道路を横断する歩行者等を効率良く検知してドライバーに知らせることができる。また、車両の駐車時には、モード設定部が防犯モードに設定することにより、例えば夜間の自宅への不審者の侵入などを検知し、ユーザーに通報することなどが可能になる。
【0027】
また本発明の一態様では、前記処理部は、前記画素密度変更領域と前記画素密度変更領域以外の領域とでは、前記検出処理の内容を異ならせてもよい。
【0028】
このようにすれば、対象物を検出するための検出処理として例えばテンプレートマッチング処理を行う場合に、画素密度変更領域に対しては精度の低いテンプレートを選択し、画素密度変更領域以外の領域に対しては精度の高いテンプレートを選択することができる。その結果、検出処理時間を短縮することができるから、対象物を効率良く検出することなどが可能になる。
【0029】
また本発明の一態様では、前記処理部は、前記画素密度変更領域以外の領域での前記検出処理の結果に基づいて、前記画素密度変更領域での前記検出処理を行ってもよい。
【0030】
このようにすれば、例えば画素密度変更領域以外の領域において対象物が検出された場合に、その検出結果に基づいて画素密度変更領域での検出処理を行うことができるから、効率の良い検出処理を行うことなどが可能になる。
【0031】
また本発明の一態様では、前記画素密度変更領域以外の領域での前記検出処理の結果は、前記対象物の動きベクトルを含んでもよい。
【0032】
このようにすれば、例えば画素密度変更領域以外の領域において対象物が検出された場合に、この対象物の動きベクトルに基づいて対象物の移動先を予測することができる。そして対象物が画素密度変更領域に移動することが予測された場合には、例えばその対象物に対応するテンプレートを予め選択することができる。その結果、画素密度変更領域において対象物を効率良く検出することなどが可能になる。
【0033】
また本発明の一態様では、前記画像取得部は、可視画像データを取得し、前記処理部は、前記検出処理を行って、前記検出処理の結果に基づくアラート記号と前記可視画像データとを重畳して表示用画像データを生成する処理を行ってもよい。
【0034】
このようにすれば、対象物が検出された場合に、その対象物に対応するアラート表示を可視画像に重畳して表示することができるから、ドライバーは視認性の良いアラート表示によって危険を察知することが容易になる。その結果、例えば夜間運転中のドライバーの負担を軽減することなどが可能になる。
【0035】
本発明の他の態様は、上記いずれかに記載の画像処理装置と、赤外線画像撮像部とを含むカメラシステムに関係する。
【0036】
本発明の他の態様は、上記いずれかに記載の画像処理装置と、赤外線画像撮像部と、前記画像処理装置と前記赤外線画像撮像部とが内部に配設された筐体とを含むカメラに関係する。
【0037】
本発明の他の態様は、上記いずれかに記載の画像処理装置と、赤外線画像撮像部と、前記表示用画像データに基づく画像を表示する表示部とを含むカメラシステムに関係する。
【0038】
本発明の他の態様は、上記いずれかに記載の画像処理装置と、赤外線画像撮像部と、前記表示用画像データに基づく画像を表示する表示部と前記画像処理装置と前記赤外線画像撮像部と前記表示部とが内部に配設された筐体とを含むカメラに関係する。
【0039】
本発明の他の態様は、赤外線画像データを取得する画像取得部と、前記画像取得部により取得された前記赤外線画像データに基づく画像領域に対して、前記画像領域を複数の領域に分割する境界線を設定し、前記境界線によって分割された複数の領域のうち少なくとも1つの領域を画素密度変更領域に設定する領域設定部と、前記画素密度変更領域の前記赤外線画像データの画素密度を低減する処理を行い、前記画素密度変更領域を含む前記画像領域の前記赤外線画像データに基づいて対象物の検出処理を行い、前記検出処理の結果に基づいて表示用画像データを生成する処理部とを含む画像処理システムに関係する。
【0040】
本発明の他の態様は、上記いずれかに記載の画像処理装置と、前記表示用画像データに基づく画像を表示する表示部とを含む画像処理システムに関係する。
【0041】
本発明の他の態様は、赤外線撮像素子が2次元配列された撮像領域を備え、前記撮像領域の一部の領域では前記赤外線撮像素子の間隔が第1の間隔であり、前記撮像領域の前記一部の領域以外の領域では前記赤外線撮像素子の間隔が前記第1の間隔より広い第2の間隔である赤外線画像撮像部と、前記赤外線画像撮像部で撮像された赤外線画像データを取得する画像取得部と、前記画像取得部により取得された前記赤外線画像データのうちの前記撮像領域に対応した画像領域に対して前記赤外線画像データに基づいて対象物の検出処理を行い、前記検出処理の結果に基づいて表示用画像データを生成する処理部とを含むカメラに関係する。
【0042】
本発明の他の態様によれば、画像取得部は、撮像領域の一部の領域では画素密度が高く、撮像領域の一部の領域以外の領域では画素密度が低い赤外線画像データを取得することができる。こうすることで、赤外線画像データの画素数を低減させることができるから、検出処理における演算処理負担を低減することができる。その結果、検出時間を短縮したり、処理部の構成を簡素にすることなどが可能になり、効率の良いカメラを実現することなどが可能になる。
【図面の簡単な説明】
【0043】
【図1】画像処理装置、画像処理システム、カメラ及びカメラシステムの第1の構成例。
【図2】画像処理装置、画像処理システム、カメラ及びカメラシステムの第2の構成例。
【図3】画像処理装置、画像処理システム、カメラ及びカメラシステムの第3の構成例。
【図4】カメラの第4の構成例。
【図5】図5(A)〜図5(C)は、3つの走行状況における画素密度変更領域の設定例。
【図6】図6(A)、図6(B)は、第1の構成例による画素密度低減処理を説明する図。
【図7】第1の構成例による画素密度低減処理を説明する図。
【図8】図8(A)、図8(B)は、第2の構成例による画素密度低減処理を説明する図。
【図9】図9(A)、図9(B)は、第2の構成例による画素密度低減処理を説明する図。
【図10】画像処理装置等における検出処理のフローチャート。
【図11】図11(A)〜図11(C)は、3つの走行状況におけるアラート表示の例。
【図12】第3の構成例における防犯モードを説明する図。
【図13】第3の構成例による防犯モードの処理のフローチャート。
【図14】図14(A)、図14(B)は、カメラシステムの車両への搭載例。
【発明を実施するための形態】
【0044】
以下、本発明の好適な実施の形態について詳細に説明する。なお以下に説明する本実施形態は特許請求の範囲に記載された本発明の内容を不当に限定するものではなく、本実施形態で説明される構成の全てが本発明の解決手段として必須であるとは限らない。
【0045】
1.画像処理装置、画像処理システム、カメラ及びカメラシステム
図1に、本実施形態の画像処理装置100、画像処理システム200、カメラ300及びカメラシステム310の第1の構成例を示す。第1の構成例の画像処理装置100は、画像取得部110、領域設定部120、処理部130を含み、記憶部150をさらに含んでもよい。画像処理システム200は、画像処理装置100及び表示部230を含む。カメラ300は、画像処理装置100、赤外線画像撮像部210、筐体(図示せず)を含み、表示部230をさらに含んでもよい。カメラシステム310は、画像処理装置100及び赤外線画像撮像部210を含み、さらに表示部230を含んでもよい。また、画像処理システム200は、画像取得部110、領域設定部120、処理部130を含む構成としてもよい。
【0046】
なお、本実施形態の画像処理装置100、画像処理システム200、カメラ300及びカメラシステム310は、図1の構成に限定されず、その構成要素の一部を省略したり、他の構成要素に置き換えたり、他の構成要素を追加するなどの種々の変形実施が可能である。
【0047】
画像取得部110、領域設定部120、処理部130は、例えばCPUなどのプロセッサーやゲートアレイなどのASICにより実現することができる。また、記憶部150は、例えばRAM、フラッシュメモリー、或いはハードディスクドライブ(HDD)などにより実現することができる。なお、記憶部150は、省略してもよい。
【0048】
画像取得部110は、赤外線画像撮像部210からの赤外線画像を取得し、処理部130に対して赤外線画像データを出力する。赤外線画像データは、例えば車両の外部領域の赤外線画像の画像データである。
【0049】
また、画像取得部110は、可視画像撮像部220からの可視画像データを取得し、処理部130に対して可視画像データを出力する。
【0050】
領域設定部120は、画像取得部110により取得された赤外線画像データに基づく画像領域に対して、画像領域を複数の領域に分割する境界線を設定し、境界線によって分割された複数の領域のうちの少なくとも1つの領域を画素密度変更領域に設定する。具体的には、領域設定部120は、画像領域における位置及び形状のうちの少なくとも1つが可変に設定される境界線を用いて画像領域を区画する設定パターンを決定する。そして決定された設定パターンにおいて境界線の画像領域における位置及び形状のうちの少なくとも1つを定める。
【0051】
より具体的には、領域設定部120は、車両の走行状況情報や全地球測位システム(GPS)により取得された車両位置情報やユーザーによる入力情報などに基づいて、設定パターンを決定し、決定された設定パターンにおいて境界線の画像領域における位置及び形状のうちの少なくとも1つを定める。例えば、領域設定部120は、車両の速度情報やヘッドライトの制御情報などに基づいて設定パターンを決定し、境界線の位置及び形状のうちの少なくとも1つを定めることができる。なお、走行状況に応じた設定パターンについては、後で説明する。
【0052】
ここで画像領域とは、例えば2次元的に撮像素子が配置された赤外線画像撮像部210により撮像され、画像取得部110により所定の時間間隔で取得される1画面(フレーム)分の画像データである。即ち、1つの画像領域は、赤外線画像撮像部210により或るタイミングで撮像された1つの画面(フレーム)を構成する赤外線画像データである。
【0053】
処理部130は、画素密度変更領域の赤外線画像データの画素密度を低減する処理(画素密度低減処理)を行う。そして画素密度変更領域を含む画像領域の赤外線画像データに基づいて対象物の検出処理(テンプレートマッチング処理)を行い、検出処理の結果に基づいて表示用画像データを生成する。この表示用画像データは、検出処理の結果に基づくアラート表示を含んでもよい。また、処理部130は、検出処理を行って、検出処理の結果に基づくアラート記号と可視画像データとを重畳して表示用画像データを生成する処理を行う。
【0054】
具体的には、処理部130は、領域設定部120により設定された画素密度変更領域ARMDの赤外線画像データに対して画素密度を低減する処理を行う。この画素密度を低減する処理(画素密度低減処理)は、画像データ上で等価的に画素密度、即ち単位面積当たりの画素数を減少させる処理であって、例えば1画面(フレーム)を構成する画像データのうちの一定の領域(画素密度変更領域)内にある画素を間引く処理(間引き処理)である。一方、画素密度変更領域ARMDを除く画像領域の赤外線画像データに対しては、画素密度低減処理を行わない。以下では、画素密度変更領域ARMDを除く画像領域を画素密度非変更領域ARNOとも呼ぶ。なお、画素密度低減処理については、後で詳細に説明する。
【0055】
また処理部130は、画素密度変更領域ARMDを含む画像領域の赤外線画像データ、即ち画素密度低減処理を行った後の赤外線画像データに基づいて、対象物の検出処理(テンプレートマッチング処理)を行う。即ち、画素密度変更領域ARMDでは画素密度非変更領域ARNOに比べて画素密度が低い赤外線画像データに基づいて、対象物(例えば歩行者、自転車など)を検出するための検出処理を行う。或いは、画素密度変更領域ARMDでは画素密度が第1のしきい値よりも低く、画素密度非変更領域ARNOでは画素密度が第2のしきい値よりも高い赤外線画像データに基づいて、対象物を検出するための検出処理を行う。ここで、第1のしきい値は第2のしきい値以下の値であって、第2のしきい値は赤外線画像撮像部210において実現可能な画素密度の範囲の値であってもよい。なお、第1、第2のしきい値は、同じ値であってもよい。
【0056】
処理部130は、テンプレートマッチング処理部131、画像合成処理部132、メモリー133を含む。メモリー133は、画素密度変更領域ARMDに対して画素密度低減処理(間引き処理)を行った後の赤外線画像データを記憶する。このようにすることで、メモリー133に記憶された赤外線画像データの画素密度変更領域ARMDの画素密度は第1のしきい値よりも低く、画素密度非変更領域ARNOの画素密度は第2のしきい値よりも高くなる。テンプレートマッチング処理部131は、メモリー133に記憶された間引き処理後の赤外線画像データに対して、対象物を検出するためのテンプレートマッチング処理を行う。
【0057】
画像合成処理部132は、テンプレートマッチング処理結果に基づいて、可視画像データにアラート表示(アラート記号)などを重畳する処理を行う。画像合成処理部132は、必要に応じて他の情報をさらに合成(重畳)する処理を行ってもよい。また、画像合成処理部132は、アラート表示を赤外線画像データに重畳する処理を行ってもよいし、或いは可視画像データ、赤外線画像データ及びアラート表示などを合成(重畳)する処理を行ってもよい。
【0058】
アラート表示は、ドライバーに歩行者や自転車などの存在を知らせるための記号(アラート記号)である。アラート表示が重畳された可視画像は、表示部230に表示される。視認性の良いアラート記号を表示することで、ドライバーの危険予知を容易にすることができる。なお、テンプレートマッチング処理及びアラート表示の詳細については、後述する。
【0059】
記憶部150は、画素密度変更領域ARMDと画素密度非変更領域ARNOとの境界線を設定する複数の設定パターンを記憶する。領域設定部120は、記憶部150から複数の設定パターンのうちのいずれか1つの設定パターンを選択して読み出し、読み出された設定パターンに基づいて境界線を設定することができる。こうすることで、例えば予め複数の走行状況に対応する複数の設定パターンを記憶部150に記憶しておくことができるから、走行状況に応じて最適な設定パターンを選択することなどが可能になる。
【0060】
赤外線画像撮像部210は、赤外線カメラであって、例えば波長が8〜12μmの遠赤外線に感度を有するものである。遠方(例えば200m先)の対象物を検出するために、焦電素子を用いた赤外線センサーカメラであれば、さらに良い。
【0061】
可視画像撮像部220は、可視光領域に感度を有するカメラであって、例えば撮像素子としてCCDやCMOSなどを用いるものである。このカメラは、高ダイナミックレンジ(HDR:High Dynamic Range)形式の画像データに対応できるものが望ましい。HDR形式対応のカメラでは、電子シャッター機能を用いて高速・低速の異なるシャッター時間で被写体の撮像を行い、その2種類の画像信号を信号処理して広いダイナミックレンジを持つ画像を得ることができる。こうすることで、例えば夜間の走行時において、通常は対向車のヘッドライトに妨げられて見えにくくなっている歩行者や対向車自身などを、明瞭に映し出すことができる。
【0062】
表示部230は、赤外線画像、可視画像及びアラート記号などを含む画像を表示する。表示部230は、例えば液晶ディスプレイ、有機ELディスプレイなどで実現することができる。
【0063】
筐体は、図示していないが、その内部に画像処理装置100と赤外線画像撮像部210とが配設される。
【0064】
図1に示す第1の構成例の画像処理装置100等によれば、テンプレートマッチング処理の対象となる赤外線画像データの画素数を低減させることができるから、検出処理における演算処理負担を低減することができる。また、対象物を検出した場合に、可視画像の対応する位置に視認性の良いアラート表示を重畳して表示することができるから、夜間運転中のドライバーの負担を軽減することなどが可能になる。
【0065】
さらに領域設定部120が、車両の走行状況情報や車両位置情報やユーザーによる入力情報などに基づいて、設定パターンを決定し、決定された設定パターンにおいて境界線の画像領域における位置及び形状のうちの少なくとも1つを定めることができる。こうすることで、車両の走行状況などに応じて画素密度変更領域ARMD及び画素密度非変更領域ARNOを可変に設定することができるから、多様な走行状況や交通状況などに対応して、歩行者などの対象物が存在する可能性の低い領域を画素密度変更領域ARMDに設定し、歩行者などの対象物が存在する可能性の高い領域を画素密度非変更領域ARNOに設定することができる。その結果、対象物の検出能力(検出精度)を低下させずに、演算処理負担を低減することができる。その結果、検出処理の処理時間を短縮したり、処理部130の回路構成を簡素にすることが可能になり、効率の良い画像処理装置等を実現することなどが可能になる。
【0066】
図2に、本実施形態の画像処理装置100、画像処理システム200、カメラ300及びカメラシステム310の第2の構成例を示す。第2の構成例の画像処理装置100は、画像取得部110、領域設定部120、処理部130を含み、記憶部150をさらに含んでもよい。画像処理システム200は、画像処理装置100及び表示部230を含む。カメラ300は、画像処理装置100、赤外線画像撮像部210、筐体(図示せず)を含み、表示部230をさらに含んでもよい。カメラシステム310は、画像処理装置100及び赤外線画像撮像部210を含み、さらに表示部230を含んでもよい。また、画像処理システム200は、画像取得部110、領域設定部120、処理部130を含む構成としてもよい。
【0067】
なお、本実施形態の画像処理装置100、画像処理システム200、カメラ300及びカメラシステム310は、図2の構成に限定されず、その構成要素の一部を省略したり、他の構成要素に置き換えたり、他の構成要素を追加するなどの種々の変形実施が可能である。
【0068】
画像取得部110、領域設定部120、記憶部150は、第1の構成例(図1)で説明したものと同一であるから、ここでは詳細な説明を省略する。
【0069】
処理部130は、画素密度変更領域の赤外線画像データの画素密度を低減する処理(画素密度低減処理)を行う。そして画素密度変更領域を含む画像領域の赤外線画像データに基づいて対象物の検出処理(テンプレートマッチング処理)を行い、検出処理の結果に基づいて表示用画像データを生成する。この表示用画像データは、検出処理の結果に基づくアラート表示を含んでもよい。また、処理部130は、検出処理を行って、検出処理の結果に基づくアラート記号と可視画像データとを重畳して表示用画像データを生成する処理を行う。
【0070】
具体的には、処理部130は、領域設定部120により設定された画素密度変更領域ARMDの赤外線画像データに対して画素密度を低減する処理を行う。この画素密度を低減する処理(画素密度低減処理)は、画像データ上で等価的に画素密度、即ち単位面積当たりの画素数を減少させる処理であって、例えば1画面(フレーム)を構成する画像データのうちの一定の領域(画素密度変更領域)内において、隣接する複数の画素に対応する画像データを混合演算して1つの画素に対応する画像データとする処理(画素混合演算処理)である。一方、画素密度変更領域ARMDを除く画像領域(画素密度非変更領域)ARNOの赤外線画像データに対しては、画素密度低減処理を行わない。なお、画素密度低減処理については、後で詳細に説明する。
【0071】
また処理部130は、画素密度変更領域ARMDを含む画像領域の赤外線画像データ、即ち画素密度低減処理を行った後の赤外線画像データに基づいて、対象物の検出処理(テンプレートマッチング処理)を行う。即ち、画素密度変更領域ARMDでは画素密度非変更領域ARNOに比べて画素密度が低い赤外線画像データに基づいて、対象物(例えば歩行者、自転車など)を検出するための検出処理を行う。或いは、画素密度変更領域ARMDでは画素密度が第1のしきい値よりも低く、画素密度非変更領域ARNOでは画素密度が第2のしきい値よりも高い赤外線画像データに基づいて、対象物を検出するための検出処理を行う。ここで、第1のしきい値は第2のしきい値以下の値であって、第2のしきい値は赤外線画像撮像部210において実現可能な画素密度の範囲の値であってもよい。なお、第1、第2のしきい値は、同じ値であってもよい。
【0072】
処理部130は、テンプレートマッチング処理部131、画像合成処理部132、2つのメモリー133、135、混合演算処理部134を含む。メモリー135は、画像取得部110からの赤外線画像データを記憶する。混合演算処理部134は、メモリー135に記憶された赤外線画像データのうちの画素密度変更領域ARMDに対応する画像データに対して、画素混合演算処理を行う。メモリー133は、画素混合演算処理を行った後の赤外線画像データを記憶する。このようにすることで、メモリー133に記憶された赤外線画像データの画素密度変更領域ARMDの画素密度は第1のしきい値よりも低く、画素密度非変更領域ARNOの画素密度は第2のしきい値よりも高くなる。テンプレートマッチング処理部131は、メモリー133に記憶された画素混合演算処理後の赤外線画像データに対して、対象物を検出するためのテンプレートマッチング処理を行う。
【0073】
画像合成処理部132は、テンプレートマッチング処理結果に基づいて、可視画像データにアラート表示(アラート記号)などを重畳する処理を行う。画像合成処理部132は、必要に応じて他の情報をさらに合成(重畳)する処理を行ってもよい。また、画像合成処理部132は、アラート表示を赤外線画像データに重畳する処理を行ってもよいし、或いは可視画像データ、赤外線画像データ及びアラート表示などを合成(重畳)する処理を行ってもよい。
【0074】
赤外線画像撮像部210、可視画像撮像部220、表示部230及び筐体(図示せず)は、第1の構成例(図1)で説明したものと同一であるから、ここでは詳細な説明を省略する。
【0075】
図2に示す第2の構成例の画像処理装置100等によれば、第1の構成例と同様に、テンプレートマッチング処理の対象となる赤外線画像データの画素数を低減させることができるから、検出処理における演算処理負担を低減することができる。また、対象物を検出した場合に、可視画像の対応する位置に視認性の良いアラート表示を重畳して表示することができるから、夜間運転中のドライバーの負担を軽減することなどが可能になる。
【0076】
さらに第1の構成例と同様に、領域設定部120が、車両の走行状況情報や車両位置情報やユーザーによる入力情報などに基づいて、設定パターンを決定し、決定された設定パターンにおいて境界線の画像領域における位置及び形状のうちの少なくとも1つを定めることができる。こうすることで、車両の走行状況などに応じて画素密度変更領域ARMD及び画素密度非変更領域ARNOを可変に設定することができるから、対象物の検出能力(検出精度)を低下させずに、効率の良い画像処理装置等を実現することなどが可能になる。
【0077】
さらに第2の構成例では、画素密度低減処理として画素混合演算処理を行うことができるから、後述するように、画素密度変更領域ARMDにおける感度(赤外線検出感度)の低下を防ぐことができる。
【0078】
図3に、本実施形態の画像処理装置100、画像処理システム200、カメラ300及びカメラシステム310の第3の構成例を示す。第3の構成例の画像処理装置100は、画像取得部110、領域設定部120、処理部130、モード設定部140を含み、記憶部150をさらに含んでもよい。画像処理システム200は、画像処理装置100及び表示部230を含む。カメラ300は、画像処理装置100、赤外線画像撮像部210、筐体(図示せず)を含み、表示部230をさらに含んでもよい。カメラシステム310は、画像処理装置100及び赤外線画像撮像部210を含み、さらに表示部230を含んでもよい。また、画像処理システム200は、画像取得部110、領域設定部120、処理部130を含む構成としてもよい。
【0079】
なお、本実施形態の画像処理装置100、画像処理システム200、カメラ300及びカメラシステム310は、図3の構成に限定されず、その構成要素の一部を省略したり、他の構成要素に置き換えたり、他の構成要素を追加するなどの種々の変形実施が可能である。
【0080】
画像取得部110、領域設定部120、記憶部150は、第1の構成例(図1)で説明したものと同一であるから、ここでは詳細な説明を省略する。
【0081】
処理部130は、第1の構成例(図1)又は第2の構成例(図2)で説明したものと同一であるから、ここでは詳細な説明を省略する。
【0082】
モード設定部140は、走行モードと防犯モードとのモード切換設定を行う。走行モードは、車両の走行中に設定されるモードであって、例えば車両の夜間走行時などに車両前方の歩行者等を検出してドライバーに警告を発するモードである。また、防犯モードは、車両の駐車中に設定されるモードであって、例えば夜間に車両が自宅に隣接して駐車している時に、自宅への侵入者等を検出して警告を発するモードである。
【0083】
画像処理装置100が走行モードに設定されている場合には、領域設定部120は、上述したように設定パターンを決定し、決定された設定パターンにおいて境界線を決定して画素密度変更領域ARMDを設定する。そして処理部130は画素密度変更領域ARMDの赤外線画像データの画素密度を低減する処理を行い、画素密度変更領域ARMDを含む画像領域の赤外線画像データに基づいて検出処理を行う。そして検出処理の結果に基づくアラート表示を含む表示用画像データを生成する処理を行う。
【0084】
一方、画像処理装置100が防犯モードに設定されている場合には、領域設定部120は境界線を非設定にする。そして処理部130は画像領域の全領域に対して赤外線画像データの画素密度を低減する処理を行い、画像領域の赤外線画像データに基づいて検出処理を行い、検出処理の結果に基づくアラート表示を含む表示用画像データを生成する処理を行う。そして検出処理によって不審者を検出した場合には、処理部130はユーザーの携帯端末などに通報する処理を行うことができる。なお、防犯モードの詳細については、後述する。
【0085】
図3に示す第3の構成例の画像処理装置100等によれば、走行モードに設定された場合には、第1、第2の構成例と同様に、テンプレートマッチング処理の対象となる赤外線画像データの画素数を低減させることができるから、検出処理における演算処理負担を低減することができる。また、対象物を検出した場合に、可視画像の対応する位置に視認性の良いアラート表示を重畳して表示することができるから、夜間運転中のドライバーの負担を軽減することなどが可能になる。
【0086】
さらに第3の構成例では、防犯モードに設定することにより、夜間の駐車時に自宅周辺の不審者などを検出することができるから、防犯用に専用のセキュリティシステム等を設置する必要がなくなるため、防犯コストの低減などが可能になる。
【0087】
図4に、本実施形態のカメラ300の第4の構成例を示す。第4の構成例のカメラ300は、赤外線画像撮像部210、画像取得部110、処理部130を含み、さらに表示部230を含んでもよい。なお、本実施形態のカメラ300は、図4の構成に限定されず、その構成要素の一部を省略したり、他の構成要素に置き換えたり、他の構成要素を追加するなどの種々の変形実施が可能である。
【0088】
赤外線画像撮像部210は、赤外線カメラであって、例えば波長が8〜12μmの遠赤外線に感度を有するものである。遠方(例えば200m先)の対象物を検出するために、焦電素子を用いた赤外線センサーカメラであれば、さらに良い。
【0089】
赤外線画像撮像部210は、赤外線撮像素子が二次元配列された撮像領域を備え、撮像領域の一部の領域IRHDでは赤外線撮像素子の間隔が第1の間隔であり、撮像領域の一部の領域IRHD以外の撮像領域IRLDでは赤外線撮像素子の間隔が第1の間隔より広い第2の間隔である。即ち、撮像領域IRHDでは赤外線画像の画素密度が高く、撮像領域IRLDでは赤外線画像の画素密度がIRHDに比べて低くなる。或いは、撮像領域IRHDの画素密度は第1のしきい値よりも高く、撮像領域IRLDの画素密度は第2のしきい値よりも低い。ここで、第1のしきい値は第2のしきい値以上の値であって、第1、第2のしきい値は共に赤外線画像撮像部210において実現可能な画素密度の範囲の値である。なお、第1、第2のしきい値は、同じ値であってもよい。
【0090】
赤外線撮像素子の間隔とは、例えば赤外線画像撮像部210の撮像面において、1つの画素(赤外線センサー素子)とそれに隣接する画素との配置間隔である。画素密度とは、例えば赤外線画像撮像部210の撮像面における単位面積当たりの画素数である。
【0091】
画像取得部110は、赤外線画像撮像部210で撮像された赤外線画像データを取得し、処理部130に対して赤外線画像データを出力する。
【0092】
処理部130は、画像取得部110により取得された赤外線画像データのうちの撮像領域に対応した画像領域に対して、赤外線画像データに基づいて対象物の検出処理(テンプレートマッチング処理)を行い、検出処理の結果に基づいて表示用画像データを生成する。
【0093】
処理部130は、テンプレートマッチング処理部131及び画像合成処理部132を含む。テンプレートマッチング処理部131は、画像取得部110からの赤外線画像データに基づいて、対象物を検出するためのテンプレートマッチング処理を行う。画像合成処理部132は、テンプレートマッチング処理結果に基づいて、赤外線画像にアラート表示(アラート記号)などを重畳する処理を行う。画像合成処理部132は、必要に応じて他の情報をさらに合成(重畳)する処理を行ってもよい。
【0094】
画像取得部110及び処理部130は、例えばCPUなどのプロセッサーやゲートアレイなどのASICにより実現することができる。
【0095】
図4に示す第4の構成例のカメラ300によれば、赤外線カメラ(赤外線画像撮像部)210により撮像された赤外線画像データに基づいて検出処理(テンプレートマッチング処理)を行って、歩行者などの対象物を検出することができる。この赤外線画像データの画像領域は、画素密度が高い撮像領域IRHDに対応する画像領域と画素密度が低い撮像領域IRLDに対応する画像領域とを含む。こうすることで、赤外線画像データの画素数を低減させることができるから、検出処理における演算処理負担を低減することができる。
【0096】
例えば赤外線画像撮像部210の撮像領域において、歩行者などの対象物が撮像される可能性の高い領域を撮像領域IRHDに設定し、対象物が撮像される可能性が低い領域を撮像領域IRLDに設定することで、対象物の検出能力(検出精度)を低下させずに、演算処理負担を低減することができる。その結果、検出処理の処理時間を短縮したり、処理部130の回路構成を簡素にすることが可能になり、効率の良い制御システムを実現することなどが可能になる。
【0097】
2.画素密度変更領域の設定及び検出処理
図5(A)〜図5(C)に、3つの走行状況における画素密度変更領域ARMDの設定例を示す。図5(A)は、例えば郊外の道路のように比較的スムーズに走行している状況において、設定パターンが第1の設定パターンに決定された場合の設定例である。図5(B)は、例えば市街地の道路を走行している状況において、設定パターンが第2の設定パターンに決定された場合の設定例である。図5(C)は、例えば山間部のように交通量の少ない道路を走行している状況において、設定パターンが第3の設定パターンに決定された場合の設定例である。図5(A)〜図5(C)は、各走行状況における赤外線画像の1フレーム(画面)であり、道路の左端LT、道路の右端RT、センターラインCLを示す。
【0098】
以下の説明において、車両に取り付けられた赤外線画像撮像部210(赤外線カメラ)からの赤外線画像において、鉛直方向(重力の方向)を「垂直方向」とし、鉛直方向と直交する方向を「水平方向」とする。或いは、道路面に対して垂直な方向を「垂直方向」とし、道路面に対して平行な方向を「水平方向」としてもよい。また、鉛直上向きを「上」、鉛直下向きを「下」とし、画像に向かって右手水平方向を「右」、左手水平方向を「左」とする。
【0099】
図5(A)の第1の設定パターンの場合には、領域設定部120は、赤外線画像データに基づく画像領域を分割する境界線BLを用いて画像領域を区画する。例えば、図5(A)に示すように、境界線BLを水平方向に設定する。そして水平方向に設定された境界線BLにより分割された画像領域のうち、上側の画像領域(広義には一方の画像領域)を画素密度非変更領域ARNOに設定し、下側の画像領域(広義には他方の画像領域)を画素密度変更領域ARMDに設定する。
【0100】
図5(A)に示す走行状況では、夜間に肉眼で視認することが難しい遠方(例えば40m以上前方)の歩行者や自転車等を検出することが重要になる。そこで、水平方向に境界線BLを設定し、その境界線BLの上側の領域、即ち遠方の対象物が映し出される領域を画素密度非変更領域ARNOに設定する。一方、境界線BLの下側の領域は、画素密度変更領域ARMDに設定される。こうすることで、例えば道路を横断しようとする歩行者(図5(A)のA1)や自転車に乗った人(図5(A)のA2)を画素密度が高い赤外線画像データを用いて検出することができる。
【0101】
図5(B)の第2の設定パターンの場合には、領域設定部120は、赤外線画像データに基づく画像領域を3分割し互いに交差しない2本の境界線を用いて画像領域を区画する。例えば図5(B)に示すように、2本の境界線BL1、BL2を垂直方向に設定する。そして垂直方向に設定された境界線BL1、BL2により3分割された画像領域のうち、中央の画像領域(広義には2本の境界線で挟まれる画像領域)を画素密度変更領域ARMDに設定する。
【0102】
図5(B)に示す走行状況では、対向車のヘッドライトにより幻惑されやすい近距離において、道路脇から飛び出してくる歩行者や自転車等を検出することが重要になる。そこで、垂直方向に第1、第2の境界線BL1、BL2を設定し、第1の境界線BL1の左側の領域と第2の境界線BL2の右側の領域とを共に画素密度非変更領域ARNOに設定する。一方、2つの境界線BL1、BL2に挟まれた領域、即ち中央の領域は、画素密度変更領域ARMDに設定される。こうすることで、例えば車両の直前を横断しようとする歩行者(図5(B)のB1)や自転車に乗った人(図5(B)のB2)を画素密度が高い赤外線画像データを用いて検出することができる。
【0103】
図5(C)の第3の設定パターンの場合には、領域設定部120は、赤外線画像データに基づく画像領域において一部の領域を囲む閉曲線を境界線として用いて画像領域を区画する。例えば図5(B)に示すように、閉曲線である境界線BLを画像領域の中央部に設定する。そして閉曲線の外側の画像領域を画素密度変更領域ARMDに設定する。ここで閉曲線とは、閉じた図形であればよく、例えば多角形であってもよい。
【0104】
図5(C)に示す走行状況では、車両速度が速いことを考慮して、より遠方(例えば100m以上前方)の対象物を検出することが重要になる。そこで、画面の中央部などの限定された領域を画素密度非変更領域ARNOに設定し、それ以外の領域(画面の周辺部)を画素密度変更領域ARMDに設定する。こうすることで、例えば車両の遠方を横断しようとする歩行者(図5(C)のC1)等を画素密度が高い赤外線画像データを用いて検出することができる。
【0105】
なお、境界線の位置は固定ではなく、例えば車両の速度情報やヘッドライトの制御情報などに基づいて可変に設定することができる。具体的には、例えば図5(A)において、車両速度が速いほど境界線の位置を画面の上方にシフトさせてもよいし、或いは、ヘッドライトをハイビームに切り換えた時に、境界線の位置を画面の上方にシフトさせ、ロービームに切り換えた時に、境界線の位置を画面の下方にシフトさせてもよい。
【0106】
また、ユーザー(ドライバー)による入力情報に基づいて、境界線の位置、形状等を可変に設定することもできる。具体的には、ドライバーが交通状況に応じて境界線設定情報を入力することにより、例えば図5(B)において、2つの境界線BL1、BL2の位置を左方又は右方にシフトさせたり、例えば図5(C)において、画面中央部の閉曲線(境界線)BLの位置又は大きさを変化させたりすることができる。
【0107】
図6(A)、図6(B)、図7は、画像処理装置100の第1の構成例(図1)による画素密度低減処理(画素の間引き処理)を説明する図である。これらの図では、赤外線画像撮像部210から取得された1画面(フレーム)分の赤外線画像データが、12行×14列の画素に対応する場合を例として説明する。なお、以下の説明では、例えば第2行第3列の画素をP(2,3)と表記する。また、画素P(2,3)の画像データを読み出し、その画像データをメモリー133に記憶することを、便宜的に「P(2,3)を読み出す」と表記する。
【0108】
図6(A)は、垂直方向に設定された2つの境界線BL1、BL2により分割された領域のうち、左側の領域と右側の領域とを共に画素密度非変更領域ARNOに設定し、中央の領域(2つの境界線BL1、BL2により挟まれた領域)を画素密度変更領域ARMDに設定する場合である。処理部130は、以下のように画素の間引き処理を行ってメモリー133に画像データを記憶する。なお、境界線BL1、BL2の位置は、図示したものに限定されず、他の位置に設定されてもよい。
【0109】
処理部130は、第1行の画素P(1,1)からP(1,4)までを順番に読み出す。次にP(1,5)を読み出さずにスキップして、P(1,6)を読み出す。次にP(1,7)を読み出さずにスキップして、P(1,8)を読み出す。次にP(1,9)を読み出さずにスキップして、P(1,10)を読み出す。そしてP(1,11)からP(1,14)までを順番に読み出す。次に第2行の画素については、P(2,1)〜P(2,4)を読み出し、P(2,5)〜P(2,10)をスキップし、P(2,11)〜P(2,14)を読み出す。そして第3行の画素については、1行目と同様に、P(3,1)〜P(3,4)、P(3,6)、P(3,8)、P(3,10)、P(3,11)〜P(3,14)を読み出し、これ以外の画素をスキップする。第4行以降についても、上記と同様に画素の間引き処理を行う。
【0110】
このようにすることで、図6(A)に示すように、画素密度非変更領域ARNOについては画素が間引かれず、画素密度変更領域ARMDについては画素数が1/4に減少し、即ち画素密度が1/4に低減される。図6(A)で網掛けされた画素に対応する画像データがメモリー133に記憶される。
【0111】
図6(B)は、水平方向に設定された境界線BLの上側の領域を画素密度非変更領域ARNOに設定し、境界線BLの下側の領域を画素密度変更領域ARMDに設定する場合である。処理部130は、以下のように画素の間引き処理を行ってメモリー133に画像データを記憶する。なお、境界線BLの位置は、図示したものに限定されず、他の位置に設定されてもよい。
【0112】
処理部130は、画素密度非変更領域ARNOについては、間引き処理を行わずに第1行から第6行までの画素を順番に読み出す。そして画素密度変更領域ARMDについては、奇数行では1つおきに画素を読み出し、偶数行では全ての画素をスキップする。例えば第7行では、P(7,2)、P(7,4)、P(7,6)、P(7,8)、P(7,10)、P(7,12)、P(7,14)が読み出され、第8行では全ての画素がスキップされる。
【0113】
このようにすることで、図6(B)に示すように、画素密度非変更領域ARNOについては画素が間引かれず、画素密度変更領域ARMDについては画素数が1/4に減少し、即ち画素密度が1/4に低減される。図6(B)で網掛けされた画素に対応する画像データがメモリー133に記憶される。
【0114】
図7は、中央部に設定された境界線BLに取り囲まれた領域を画素密度非変更領域ARNOに設定し、中央部に設定された境界線BLの外側の領域を画素密度変更領域ARMDに設定する場合である。処理部130は、以下のように画素の間引き処理を行ってメモリー133に画像データを記憶する。なお、境界線BLの位置は、図示したものに限定されず、他の位置に設定されてもよい。
【0115】
処理部130は、画素密度非変更領域ARNOについては、全ての画素を読み出す。そして画素密度変更領域ARMDについては、奇数行では1つおきに画素を読み出し、偶数行では全ての画素をスキップする。例えば第1行では、P(1,2)、P(1,4)、P(1,6)、P(1,8)、P(1,10)、P(1,12)、P(1,14)が読み出され、第2行では全ての画素がスキップされる。第5行では、P(5,2)、P(5,4)、P(5,5)〜P(5,10)、P(5,12)、P(5,14)が読み出される。
【0116】
このようにすることで、図7に示すように、画素密度非変更領域ARNOについては画素が間引かれず、画素密度変更領域ARMDについては画素数が1/4に減少し、即ち画素密度が1/4に低減される。図7で網掛けされた画素に対応する画像データがメモリー133に記憶される。
【0117】
図8(A)、図8(B)、図9(A)、図9(B)は、画像処理装置100の第2の構成例(図2)による画素密度低減処理(画素混合演算処理)を説明する図である。これらの図では、赤外線画像撮像部210から取得された1画面(フレーム)分の赤外線画像データが、12行×14列の画素に対応する場合を例として説明する。なお、以下の説明では、例えば第2行第3列の画素をP(2,3)と表記する。
【0118】
図8(A)に示すように、始めに処理部130は、全ての画素を読み出して、画像データをメモリー135に記憶する。そして以下に説明するように、画素混合演算処理を行って、その結果をメモリー133に記憶する。
【0119】
図8(B)は、垂直方向に設定された2つの境界線BL1、BL2により分割された領域のうち、左側の領域と右側の領域とを共に画素密度非変更領域ARNOに設定し、中央の領域(2つの境界線BL1、BL2により挟まれた領域)を画素密度変更領域ARMDに設定する場合である。なお、境界線BL1、BL2の位置は、図示したものに限定されず、他の位置に設定されてもよい。
【0120】
処理部130は、画素密度非変更領域ARNOについては画素混合演算処理を行わずに、画像データをそのままメモリー133に記憶する。一方、画素密度変更領域ARMDについては、4つの画素の画像データを混合演算処理し、その結果を1つの画素の画像データとしてメモリー133に記憶する。例えば、4つの画素P(1,7)、P(2,7)、P(1,8)、P(2,8)について画像データを混合演算処理し、その結果を1つの画素P(1,8)の画像データとしてメモリー133に記憶する。図8(B)では、混合演算処理の単位となる4つの画素をA、B、C、Dで示し、処理結果を画素Dの画像データとしてメモリー133に記憶する。このようにすることで、画素密度非変更領域ARNOについては画素密度が変化せず、画素密度変更領域ARMDについては画素数が1/4に減少し、即ち画素密度が1/4に低減される。
【0121】
図9(A)は、水平方向に設定された境界線BLの上側の領域を画素密度非変更領域ARNOに設定し、境界線BLの下側の領域を画素密度変更領域ARMDに設定する場合である。なお、境界線BLの位置は、図示したものに限定されず、他の位置に設定されてもよい。
【0122】
この場合も図8(B)と同様に、処理部130は、画素密度非変更領域ARNOについては画素混合演算処理を行わずに、画像データをそのままメモリー133に記憶する。一方、画素密度変更領域ARMDについては、4つの画素の画像データを混合演算処理し、その結果を1つの画素の画像データとしてメモリー133に記憶する。例えば、4つの画素P(9,1)、P(10,1)、P(9,2)、P(10,2)について画像データを混合演算処理し、その結果を1つの画素P(9,2)の画像データとしてメモリー133に記憶する。このようにすることで、画素密度非変更領域ARNOについては画素密度が変化せず、画素密度変更領域ARMDについては画素数が1/4に減少し、即ち画素密度が1/4に低減される。
【0123】
図9(B)は、中央部に設定された境界線BLに取り囲まれた領域を画素密度非変更領域ARNOに設定し、中央部に設定された境界線BLの外側の領域を画素密度変更領域ARMDに設定する場合である。なお、境界線BLの位置は、図示したものに限定されず、他の位置に設定されてもよい。
【0124】
この場合も図8(B)、図9(A)と同様に、処理部130は、画素密度非変更領域ARNOについては画素混合演算処理を行わずに、画像データをそのままメモリー133に記憶する。一方、画素密度変更領域ARMDについては、4つの画素の画像データを混合演算処理し、その結果を1つの画素の画像データとしてメモリー133に記憶する。例えば、4つの画素P(1,1)、P(2,1)、P(1,2)、P(2,2)について画像データを混合演算処理し、その結果を1つの画素P(1,2)の画像データとしてメモリー133に記憶する。このようにすることで、画素密度非変更領域ARNOについては画素密度が変化せず、画素密度変更領域ARMDについては画素数が1/4に減少し、即ち画素密度が1/4に低減される。
【0125】
以上説明した画素混合演算処理によれば、4つの画素A、B、C、Dの画像データを混合して1つの画素Dの画像データとするから、1つの画素Dの感度を等価的に4倍にすることになる。従って、画素密度変更領域ARMDにおいて、画素密度が1/4になっても、単位面積当たりの感度(赤外線検出感度)は変化しない。
【0126】
図10は、本実施形態の画像処理装置100等における検出処理(テンプレートマッチング処理)のフローチャートである。このテンプレートマッチング処理は、処理部130に含まれるテンプレートマッチング処理部131により実行される。
【0127】
最初のステップS1で、処理に必要なパラメーターの初期設定を行う。次のステップS2で、画像取得部110が赤外線カメラ(赤外線画像撮像部)210からの赤外線画像を取得する。そして次のステップ3では、領域設定部120からの境界線設定情報に基づいて、赤外線画像(熱画像)データの1フレーム(1画面)分のデータ毎に画素密度変更領域ARMDが設定され、画素密度変更領域ARMDの画像データに対して画素密度の低減処理が実行される。なお、カメラ300の第4の構成例(図4)の場合には、赤外線画像撮像部210から取得された画像データが、画素密度が高い撮像領域IRHDに対応する画像領域と画素密度が低い撮像領域IRLDに対応する画像領域とを含むから、このステップ3を省略してもよい。
【0128】
次にステップS4では、画素密度低減処理後の赤外線画像データから検出候補領域を抽出する。具体的には、対象物の特徴を表す温度領域を塊として抽出する。ここでは例として、先行車両及び歩行者(人物)を検出対象とする場合について説明する。これ以外のものを検出の対象とする場合には、その対象が有する温度情報を特徴量として、それぞれ本ステップにおいて処理対象に加えればよい。
【0129】
先行車両の場合は、マフラー領域が100°C程度の高温になることを利用して、赤外線画像中から例えば80°C以上の温度情報を有する領域を探索して、その領域の位置情報と温度情報を検出する。
【0130】
一方、歩行者の場合は、露出している顔及び首の表面温度が30°C程度の中温になることを利用して、熱画像中から例えば30°C程度の温度情報を有する領域を探索して、その領域の位置情報と温度情報を検出する。ここで、各領域で検出される結果のうち、位置情報としては例えば塊の重心座標位置とすればよく、温度情報としては例えば塊の平均温度とすればよい。また重心座標位置以外に、縦横比、充足率、実面積などの条件を満たす部位の存在を調べる。これによって、歩行者の存在位置を画面上の2次元座標上で画面全体の幅と高さに対する割合で求める。
【0131】
そして、ステップS5では、ステップS4で得られた各領域の位置情報と温度情報を対応付けした位置及び温度リストを作成して以降の処理に進む。
【0132】
次のステップS6では、ステップS5で作成したリストに基づいて、検出候補があるか否か、即ち検出対象である先行車や歩行者の特徴量を示す温度情報が抽出されているか否かを判断する。リスト内に対象物の候補が1つも抽出されていない場合には、今回の赤外線画像の中には検出対象である先行車や歩行者が存在しないものと判断して、次のフレーム(画面)の処理のためにステップS2に戻る。
【0133】
一方、リスト内に対象物の候補が1つ以上抽出されている場合には、次のステップS7で検出候補領域(存在候補領域)を設定し、続くステップS8で、ステップS5で作成したリストの温度情報に基づいて、以降の処理で用いるためのテンプレート候補を選択する。具体的には、その検出候補領域の平均温度情報±ΔTの範囲内の値を持つテンプレートを、1つの検出候補領域内での対象物検出に用いるテンプレート候補とする。
【0134】
例えば、先行車存在候補領域に用いるテンプレートとして選択されるのは、温度情報が100±3°Cのテンプレートである。但し、高温部分については、通常の走行環境内では特殊な存在であるため、予め例えば80°C以上の領域をテンプレートとして選択してもよい。一方、歩行者存在候補領域に用いるテンプレートとして選択されるのは、温度情報が28±3°Cのテンプレートである。高温部分については、外気温の影響等を考えると、同一の物体でも所定の範囲では温度が変化することを考慮する必要がある。また、上記の例では中温情報を有する対象物を歩行者としているが、例えば動物(犬等)と区別するためには、本ステップで動物のテンプレートも候補として選択される。
【0135】
このようにして検出候補領域毎に最適なテンプレートを決定し、次のステップS9では決定されたテンプレートを用いて、検出処理(テンプレートマッチング処理)を行う。即ち、赤外画像中でテンプレートマッチング処理を行い、各検出候補領域内での最終的な対象物の有無及びその位置を検出する。本ステップでは、先行車存在候補領域から先行車を検出する場合には、車体テンプレートを用いて、先行車存在候補領域と車体テンプレートでの濃度値(濃淡値)の相関演算によって先行車両の有無とその詳細な位置を検出する。また、歩行者存在候補領域から歩行者を検出する場合には、歩行者存在候補領域と人テンプレートでの濃度値の相関演算によって歩行者の有無とその詳細な位置を検出する。
【0136】
なお、上記の説明では、テンプレートマッチング処理時にテンプレートマッチング処理を濃度値での相関演算で行っているが、本実施形態の画像処理装置100等は、これに限定されるものではなく、例えばエッジ画像をテンプレートとして持っておき、この相関値で最終的な対象物の有無とその位置を検出するようにしてもよい。
【0137】
次に、ステップS10では、ステップS5で作成されたリストにある検出候補領域の全てに対して検出処理が行われたかどうかを判断する。全ての検出候補領域に対して処理が終了していなければ、処理領域を切り替えるために、ステップS7に戻り、次の検出候補領域の設定を行う。リストにある領域の全てについて処理が終了していれば、それまでの処理結果を出力するために次のステップS11へ進む。
【0138】
ステップS11では、テンプレートマッチング処理部131が上述した検出結果を画像合成処理部132に出力する。対象物が検出された場合には、画像合成処理部132は、アラート表示を可視画像に重畳する処理を行って、表示部230に出力する。
【0139】
本実施形態の画像処理装置100等によれば、処理部130は、画素密度変更領域ARMDと画素密度変更領域以外の領域(即ち、画素密度非変更領域ARNO)とでは、対象物を検出するための検出処理の内容を異ならせることができる。具体的には、例えばステップS8のテンプレート選択において、画素密度非変更領域ARNOの検出候補領域に対しては精度(解像度)の高いテンプレートを選択し、画素密度変更領域ARMDの検出候補領域に対しては精度(解像度)の低いテンプレートを選択することができる。こうすることで、画素密度非変更領域ARNOに対しては精度の高い検出処理が可能になり、画素密度変更領域ARMDに対しては、精度は低下するが処理時間を短縮することができるから、より効率的な検出処理(テンプレートマッチング処理)を行うことができる。
【0140】
また本実施形態の画像処理装置100等によれば、処理部130は、画素密度変更領域以外の領域(画素密度非変更領域ARNO)での検出処理の結果に基づいて、画素密度変更領域ARMDでの検出処理を行うことができる。具体的には、処理部130は、画素密度非変更領域ARNOでの検出処理で得られた対象物の動きベクトルに基づいて、画素密度変更領域ARMDでの検出処理を行うことができる。この動きベクトルは、例えば歩行者など対象物が移動する場合に、対象物が移動する速さ及び方向を表すベクトルである。
【0141】
例えば、図5(B)のB1に示すように、画素密度非変更領域ARNOで歩行者が検出された場合に、この歩行者の動きベクトルが右方向に向いている時には、処理部130は、この動きベクトルに基づいて歩行者が画素密度変更領域ARMDに移動することを予測できる。そして予め歩行者の移動先に歩行者存在候補領域を設定し、人テンプレートを選択しておくことができる。こうすることで、画素密度変更領域ARMDでの歩行者の検出処理時間を短縮することができる。
【0142】
さらに本実施形態の画像処理装置100等によれば、処理部130は、画素密度非変更領域ARNOで対象物が検出され、対象物が画素密度変更領域ARMDに移動すると予測された場合には、画素密度変更領域ARMDにおいて、予測されない場合に比べて画素密度が高い赤外線画像データに基づいて、検出処理を行うことができる。
【0143】
画素密度非変更領域ARNOで対象物が検出された場合に、対象物が画素密度変更領域ARMDに移動するか否かの予測は、例えばその対象物の動きベクトルなどに基づいて、処理部130の判定処理により実行される。
【0144】
例えば、図5(B)のB1に示すように、画素密度非変更領域ARNOで歩行者が検出され、右方向への動きベクトルなどに基づいて、歩行者が画素密度変更領域ARMDに移動することを予測する判定処理が行われた場合には、処理部130は、画素密度変更領域ARMDの赤外線画像データに対して画素密度低減処理を行わない(省略する)ことができる。こうすることで、画素密度変更領域ARMDに移動した対象物(歩行者など)に対しても、画素密度非変更領域ARNOと同じ画素密度(広義には対象物が画素密度変更領域ARMDに移動すると予測されない場合に比べて高い画素密度)を有する赤外線画像データに基づいて検出処理を行うことができるから、より正確に対象物の位置を検出することができる。
【0145】
図11(A)〜図11(C)に、3つの走行状況におけるアラート表示の例を示す。図11(A)〜図11(C)は、表示部230に表示された画像を示し、上述した第1の走行状況(図5(A))、第2の走行状況(図5(B))、第3の走行状況(図5(C))にそれぞれ対応する。
【0146】
図11(A)に示すように、歩行者及び自転車に乗っている人が検出された位置に、歩行者及び自転車の存在をドライバーに知らせるためのアラート記号AM1、AM2が可視画像に重畳されて表示される。
【0147】
図11(B)では、歩行者が検出された位置に、歩行者の存在を知らせるためのアラート記号AM1が可視画像に重畳されて表示され、また自転車が検出された位置に、自転車の存在を知らせるためのアラート記号AM2が可視画像に重畳されて表示される。
【0148】
図11(C)では、中央部の歩行者が検出された位置に、歩行者の存在を知らせるためのアラート記号AM1が可視画像に重畳されて表示される。
【0149】
3.防犯モード
図12は、本実施形態の画像処理装置100等の第3の構成例(図3)における防犯モードを説明する図である。図12に示すように、例えば夜間に自家用車を自宅近くに駐車する場合などに、画像処理装置100等を防犯モードに設定することにより、夜間の自宅への不審者の侵入などを検出することができる。走行モードと防犯モードとの切換は、モード設定部140が行う。
【0150】
具体的には、車両のルーフ等に設けた赤外線画像撮像部(赤外線カメラ)210により自宅の周囲の赤外線画像を所定の時間間隔で撮像する。防犯モードに設定されている場合には、領域設定部120は境界線を非設定にし、処理部130は赤外線画像領域の全領域に対して赤外線画像データの画素密度を低減する処理を行う。そして処理部130は、画像領域の赤外線画像データに基づいて検出処理を行い、検出処理の結果に基づくアラート表示を含む表示用画像データを生成する処理を行う。処理部130は、検出処理によって不審者を検出した場合には、例えばユーザーの携帯端末などに通報する処理を行うことができる。
【0151】
防犯モードでは、走行モードに比べて、対象物の位置検出について高い精度は要求されない。不審者の存在を検出できればよいからである。従って、画像領域の全領域に対して画素密度を低減する処理を行うことで、検出処理における演算処理負担を低減することができる。その結果、防犯モードでの消費電力を低減することができるから、駐車時のバッテリーの消費を抑えることができる。
【0152】
なお、赤外線カメラ210をルーフレール等に設けて、赤外線カメラ210の位置を移動させたり、或いは赤外線カメラ210を回転できる台座に設けることで、赤外線カメラ210の光軸方向を可変に設定することができる。こうすることで、不審者が侵入するおそれがある方向に赤外線カメラ210の光軸方向を設定することなどが可能になる。
【0153】
図13は、第3の構成例(図3)による防犯モードの処理のフローチャートである。この処理は画像取得部110及び処理部130により実行される。
【0154】
最初のステップS21で、処理に必要なパラメーターの初期設定を行う。次のステップS22で、設定されているモードが走行モードであるか、或いは防犯モードであるかを判断する。防犯モードに設定されている場合には、次のステップS23が実行される。一方、走行モードに設定されている場合には、上述した走行モードのフローチャート(図10)のステップS2以降の処理が実行される。
【0155】
ステップS23では、画像取得部110が赤外線カメラ(赤外線画像撮像部)210からの赤外線画像データを取得する。そして次のステップS24では、処理部130が赤外線画像データの画像領域の全領域に対して画素密度を低減する処理を行い、続いてステップS25で対象物の検出処理(テンプレートマッチング処理)を実行する。この検出処理は、既に説明した図10のステップS4〜S10と同様の処理であるから、ここでは詳細な説明を省略する。なお、防犯モードでは、走行モードに比べて、対象物の位置検出について高い精度が要求されないから、精度(解像度)の低いテンプレートを選択することができる。
【0156】
検出処理が終了するとステップS26に進み、対象物が検出されたか否かを判断する。対象物が検出された場合には、ステップS27で例えばユーザーの携帯端末など外部に通知する処理を行う。
【0157】
対象物が検出されない場合には、ステップS22に戻る。引き続き防犯モードに設定されている場合には、前回の赤外線画像データの取得時から一定時間経過後に、ステップS23で次の赤外線画像データを取得する。一定の時間間隔で赤外線画像データを取得することで、消費電力を低減することができるから、駐車時のバッテリーの消費を抑えることができる。
【0158】
このように本実施形態の画像処理装置100等の第3の構成例によれば、防犯モードに設定することにより、夜間の駐車時に自宅周辺の不審者などを検出することができるから、防犯用に専用のセキュリティシステム等を設置する必要がなくなるため、防犯コストの低減などが可能になる。また、防犯モードでは消費電力を低減することができるから、駐車時のバッテリーの消費を抑えることができる。
【0159】
4.カメラシステム
図14(A)、図14(B)に、本実施形態のカメラシステム310の車両への搭載例を示す。図14(A)、図14(B)に示すカメラシステム310は、画像処理装置100、赤外線画像撮像部210、可視画像撮像部220、表示部230を含む。なお、本実施形態のカメラシステム310は、図14(A)、図14(B)の構成に限定されず、その構成要素の一部を省略したり、他の構成要素に置き換えたり、他の構成要素を追加するなどの種々の変形実施が可能である。
【0160】
図14(A)は車両を上から見た平面図であり、図14(B)は車両の側面図である。赤外線画像撮像部(赤外線カメラ)210は、例えば車両のバンパー部分に設けられ、可視画像撮像部(可視カメラ)220は、例えば車両のルーフに設けられる。画像処理装置100は、ダッシュボードなどのドライバーが操作しやすい位置に設けられ、表示部230はドライバーが視認しやすい位置に設けられる。なお、これら構成要素の搭載位置は、図示される位置に限定されず、例えば赤外線画像撮像部(赤外線カメラ)210をルーフに設けてもよい。また、表示部230は、ヘッドアップディスプレイであってもよい。
【0161】
なお、以上のように本実施形態について詳細に説明したが、本発明の新規事項及び効果から実体的に逸脱しない多くの変形が可能であることは当業者には容易に理解できるであろう。従って、このような変形例は全て本発明の範囲に含まれるものとする。例えば、明細書又は図面において、少なくとも一度、より広義又は同義な異なる用語と共に記載された用語は、明細書又は図面のいかなる箇所においても、その異なる用語に置き換えることができる。また画像処理装置、画像処理システム、カメラ及びカメラシステムの構成、動作も本実施形態で説明したものに限定されず、種々の変形実施が可能である。
【符号の説明】
【0162】
100 画像処理装置、110 画像取得部、120 領域設定部、130 処理部、
131 テンプレートマッチング処理部、132 画像合成処理部、133 メモリー、
134 混合演算処理部、135 メモリー、140 モード設定部、150 記憶部、
200 画像処理システム、210 赤外線画像撮像部、220 可視画像撮像部、
230 表示部、300 カメラ、310 カメラシステム、
ARMD 画素密度変更領域、ARNO 画素密度非変更領域、BL 境界線
【特許請求の範囲】
【請求項1】
赤外線画像データを取得する画像取得部と、
前記画像取得部により取得された前記赤外線画像データに基づく画像領域に対して、前記画像領域を複数の領域に分割する境界線を設定し、前記境界線によって分割された複数の領域のうちの少なくとも1つの領域を画素密度変更領域に設定する領域設定部と、
前記画素密度変更領域の前記赤外線画像データの画素密度を低減する処理を行い、前記画素密度変更領域を含む前記画像領域の前記赤外線画像データに基づいて対象物の検出処理を行い、前記検出処理の結果に基づいて表示用画像データを生成する処理部とを含むことを特徴とする画像処理装置。
【請求項2】
請求項1において、
前記領域設定部は、
前記画像領域における位置及び形状のうちの少なくとも1つが可変に設定される前記境界線を用いて前記画像領域を区画する設定パターンを決定し、
決定された前記設定パターンにおいて前記境界線の前記画像領域における位置及び形状のうちの少なくとも1つを定めることを特徴とする画像処理装置。
【請求項3】
請求項2において、
前記領域設定部は、
前記画像領域を分割する前記境界線を用いて前記画像領域を区画する第1の設定パターンを決定可能に備え、
決定された前記設定パターンが前記第1の設定パターンである場合には、前記境界線により分割された画像領域のうち、一方の画像領域を前記画素密度変更領域に設定することを特徴とする画像処理装置。
【請求項4】
請求項2又は3において、
前記領域設定部は、
前記画像領域を3分割し互いに交差しない2本の前記境界線を用いて前記画像領域を区画する第2の設定パターンを決定可能に備え、
決定された前記設定パターンが前記第2の設定パターンである場合には、前記境界線により3分割された画像領域のうち、前記2本の境界線で挟まれる画像領域を前記画素密度変更領域に設定することを特徴とする画像処理装置。
【請求項5】
請求項2乃至4のいずれかにおいて、
前記領域設定部は、
前記画像領域において一部の領域を囲む閉曲線を前記境界線として用いて前記画像領域を区画する第3の設定パターンを決定可能に備え、
決定された前記設定パターンが前記第3の設定パターンである場合には、前記閉曲線の外側の前記画像領域を前記画素密度変更領域に設定することを特徴とする画像処理装置。
【請求項6】
請求項2乃至5のいずれかにおいて、
前記表示用画像データは、前記検出処理の結果に基づくアラート表示を含むことを特徴とする画像処理装置。
【請求項7】
請求項2乃至6のいずれかにおいて、
前記赤外線画像データは、車両の外部領域の赤外線画像の画像データであり、
前記領域設定部は、
前記車両の走行状況情報に基づいて、前記設定パターンを決定し、決定された前記設定パターンにおいて前記境界線の前記画像領域における位置及び形状のうちの少なくとも1つを定めることを特徴とする画像処理装置。
【請求項8】
請求項7において、
前記車両の走行状況情報は、
前記車両の速度情報であることを特徴とする画像処理装置。
【請求項9】
請求項2乃至8のいずれかにおいて、
前記領域設定部は、
ユーザーによる入力情報に基づいて、前記設定パターンを決定し、決定された前記設定パターンにおいて前記境界線の前記画像領域における位置及び形状のうちの少なくとも1つを定めることを特徴とする画像処理装置。
【請求項10】
請求項1乃至9のいずれかにおいて、
走行モードと防犯モードとのモード切換設定を行うモード設定部をさらに含み、
前記走行モードに設定されている場合には、
前記領域設定部は、前記画素密度変更領域を設定し、
前記処理部は、前記画素密度変更領域の前記赤外線画像データの画素密度を低減する処理を行い、前記画素密度変更領域を含む前記画像領域の前記赤外線画像データに基づいて前記検出処理を行い、前記検出処理の結果に基づくアラート表示を含む表示用画像データを生成する処理を行い、
前記防犯モードに設定されている場合には、
前記領域設定部は、前記境界線を非設定にし、
前記処理部は、前記画像領域の全領域に対して前記赤外線画像データの画素密度を低減する処理を行い、前記画像領域の前記赤外線画像データに基づいて前記検出処理を行い、前記検出処理の結果に基づくアラート表示を含む表示用画像データを生成する処理を行うことを特徴とする画像処理装置。
【請求項11】
請求項1乃至10のいずれかにおいて、
前記処理部は、
前記画素密度変更領域と前記画素密度変更領域以外の領域とでは、前記検出処理の内容を異ならせることを特徴とする画像処理装置。
【請求項12】
請求項11において、
前記処理部は、
前記画素密度変更領域以外の領域での前記検出処理の結果に基づいて、前記画素密度変更領域での前記検出処理を行うことを特徴とする画像処理装置。
【請求項13】
請求項12において、
前記画素密度変更領域以外の領域での前記検出処理の結果は、
前記対象物の動きベクトルを含むことを特徴とする画像処理装置。
【請求項14】
請求項1乃至13のいずれかにおいて、
前記画像取得部は、
可視画像データを取得し、
前記処理部は、
前記検出処理を行って、前記検出処理の結果に基づくアラート記号と前記可視画像データとを重畳して表示用画像データを生成する処理を行うことを特徴とする画像処理装置。
【請求項15】
請求項1乃至14のいずれかに記載の画像処理装置と、
赤外線画像撮像部とを含むことを特徴とするカメラシステム。
【請求項16】
請求項1乃至14のいずれかに記載の画像処理装置と、
赤外線画像撮像部と、
前記画像処理装置と前記赤外線画像撮像部とが内部に配設された筐体とを含むことを特徴とするカメラ。
【請求項17】
請求項1乃至14のいずれかに記載の画像処理装置と、
赤外線画像撮像部と、
前記表示用画像データに基づく画像を表示する表示部とを含むことを特徴とするカメラシステム。
【請求項18】
請求項1乃至14のいずれかに記載の画像処理装置と、
赤外線画像撮像部と、
前記表示用画像データに基づく画像を表示する表示部と
前記画像処理装置と前記赤外線画像撮像部と前記表示部とが内部に配設された筐体とを含むことを特徴とするカメラ。
【請求項19】
赤外線画像データを取得する画像取得部と、
前記画像取得部により取得された前記赤外線画像データに基づく画像領域に対して、前記画像領域を複数の領域に分割する境界線を設定し、前記境界線によって分割された複数の領域のうち少なくとも1つの領域を画素密度変更領域に設定する領域設定部と、
前記画素密度変更領域の前記赤外線画像データの画素密度を低減する処理を行い、前記画素密度変更領域を含む前記画像領域の前記赤外線画像データに基づいて対象物の検出処理を行い、前記検出処理の結果に基づいて表示用画像データを生成する処理部とを含むことを特徴とする画像処理システム。
【請求項20】
請求項1乃至13のいずれかに記載の画像処理装置と、
前記表示用画像データに基づく画像を表示する表示部とを含むことを特徴とする画像処理システム。
【請求項21】
赤外線撮像素子が二次元配列された撮像領域を備え、前記撮像領域の一部の領域では前記赤外線撮像素子の間隔が第1の間隔であり、前記撮像領域の前記一部の領域以外の領域では前記赤外線撮像素子の間隔が前記第1の間隔より広い第2の間隔である赤外線画像撮像部と、
前記赤外線画像撮像部で撮像された赤外線画像データを取得する画像取得部と、
前記画像取得部により取得された前記赤外線画像データの前記撮像領域に対応した画像領域に対して、前記赤外線画像データに基づいて対象物の検出処理を行い、前記検出処理の結果に基づいて表示用画像データを生成する処理部とを含むことを特徴とするカメラ。
【請求項1】
赤外線画像データを取得する画像取得部と、
前記画像取得部により取得された前記赤外線画像データに基づく画像領域に対して、前記画像領域を複数の領域に分割する境界線を設定し、前記境界線によって分割された複数の領域のうちの少なくとも1つの領域を画素密度変更領域に設定する領域設定部と、
前記画素密度変更領域の前記赤外線画像データの画素密度を低減する処理を行い、前記画素密度変更領域を含む前記画像領域の前記赤外線画像データに基づいて対象物の検出処理を行い、前記検出処理の結果に基づいて表示用画像データを生成する処理部とを含むことを特徴とする画像処理装置。
【請求項2】
請求項1において、
前記領域設定部は、
前記画像領域における位置及び形状のうちの少なくとも1つが可変に設定される前記境界線を用いて前記画像領域を区画する設定パターンを決定し、
決定された前記設定パターンにおいて前記境界線の前記画像領域における位置及び形状のうちの少なくとも1つを定めることを特徴とする画像処理装置。
【請求項3】
請求項2において、
前記領域設定部は、
前記画像領域を分割する前記境界線を用いて前記画像領域を区画する第1の設定パターンを決定可能に備え、
決定された前記設定パターンが前記第1の設定パターンである場合には、前記境界線により分割された画像領域のうち、一方の画像領域を前記画素密度変更領域に設定することを特徴とする画像処理装置。
【請求項4】
請求項2又は3において、
前記領域設定部は、
前記画像領域を3分割し互いに交差しない2本の前記境界線を用いて前記画像領域を区画する第2の設定パターンを決定可能に備え、
決定された前記設定パターンが前記第2の設定パターンである場合には、前記境界線により3分割された画像領域のうち、前記2本の境界線で挟まれる画像領域を前記画素密度変更領域に設定することを特徴とする画像処理装置。
【請求項5】
請求項2乃至4のいずれかにおいて、
前記領域設定部は、
前記画像領域において一部の領域を囲む閉曲線を前記境界線として用いて前記画像領域を区画する第3の設定パターンを決定可能に備え、
決定された前記設定パターンが前記第3の設定パターンである場合には、前記閉曲線の外側の前記画像領域を前記画素密度変更領域に設定することを特徴とする画像処理装置。
【請求項6】
請求項2乃至5のいずれかにおいて、
前記表示用画像データは、前記検出処理の結果に基づくアラート表示を含むことを特徴とする画像処理装置。
【請求項7】
請求項2乃至6のいずれかにおいて、
前記赤外線画像データは、車両の外部領域の赤外線画像の画像データであり、
前記領域設定部は、
前記車両の走行状況情報に基づいて、前記設定パターンを決定し、決定された前記設定パターンにおいて前記境界線の前記画像領域における位置及び形状のうちの少なくとも1つを定めることを特徴とする画像処理装置。
【請求項8】
請求項7において、
前記車両の走行状況情報は、
前記車両の速度情報であることを特徴とする画像処理装置。
【請求項9】
請求項2乃至8のいずれかにおいて、
前記領域設定部は、
ユーザーによる入力情報に基づいて、前記設定パターンを決定し、決定された前記設定パターンにおいて前記境界線の前記画像領域における位置及び形状のうちの少なくとも1つを定めることを特徴とする画像処理装置。
【請求項10】
請求項1乃至9のいずれかにおいて、
走行モードと防犯モードとのモード切換設定を行うモード設定部をさらに含み、
前記走行モードに設定されている場合には、
前記領域設定部は、前記画素密度変更領域を設定し、
前記処理部は、前記画素密度変更領域の前記赤外線画像データの画素密度を低減する処理を行い、前記画素密度変更領域を含む前記画像領域の前記赤外線画像データに基づいて前記検出処理を行い、前記検出処理の結果に基づくアラート表示を含む表示用画像データを生成する処理を行い、
前記防犯モードに設定されている場合には、
前記領域設定部は、前記境界線を非設定にし、
前記処理部は、前記画像領域の全領域に対して前記赤外線画像データの画素密度を低減する処理を行い、前記画像領域の前記赤外線画像データに基づいて前記検出処理を行い、前記検出処理の結果に基づくアラート表示を含む表示用画像データを生成する処理を行うことを特徴とする画像処理装置。
【請求項11】
請求項1乃至10のいずれかにおいて、
前記処理部は、
前記画素密度変更領域と前記画素密度変更領域以外の領域とでは、前記検出処理の内容を異ならせることを特徴とする画像処理装置。
【請求項12】
請求項11において、
前記処理部は、
前記画素密度変更領域以外の領域での前記検出処理の結果に基づいて、前記画素密度変更領域での前記検出処理を行うことを特徴とする画像処理装置。
【請求項13】
請求項12において、
前記画素密度変更領域以外の領域での前記検出処理の結果は、
前記対象物の動きベクトルを含むことを特徴とする画像処理装置。
【請求項14】
請求項1乃至13のいずれかにおいて、
前記画像取得部は、
可視画像データを取得し、
前記処理部は、
前記検出処理を行って、前記検出処理の結果に基づくアラート記号と前記可視画像データとを重畳して表示用画像データを生成する処理を行うことを特徴とする画像処理装置。
【請求項15】
請求項1乃至14のいずれかに記載の画像処理装置と、
赤外線画像撮像部とを含むことを特徴とするカメラシステム。
【請求項16】
請求項1乃至14のいずれかに記載の画像処理装置と、
赤外線画像撮像部と、
前記画像処理装置と前記赤外線画像撮像部とが内部に配設された筐体とを含むことを特徴とするカメラ。
【請求項17】
請求項1乃至14のいずれかに記載の画像処理装置と、
赤外線画像撮像部と、
前記表示用画像データに基づく画像を表示する表示部とを含むことを特徴とするカメラシステム。
【請求項18】
請求項1乃至14のいずれかに記載の画像処理装置と、
赤外線画像撮像部と、
前記表示用画像データに基づく画像を表示する表示部と
前記画像処理装置と前記赤外線画像撮像部と前記表示部とが内部に配設された筐体とを含むことを特徴とするカメラ。
【請求項19】
赤外線画像データを取得する画像取得部と、
前記画像取得部により取得された前記赤外線画像データに基づく画像領域に対して、前記画像領域を複数の領域に分割する境界線を設定し、前記境界線によって分割された複数の領域のうち少なくとも1つの領域を画素密度変更領域に設定する領域設定部と、
前記画素密度変更領域の前記赤外線画像データの画素密度を低減する処理を行い、前記画素密度変更領域を含む前記画像領域の前記赤外線画像データに基づいて対象物の検出処理を行い、前記検出処理の結果に基づいて表示用画像データを生成する処理部とを含むことを特徴とする画像処理システム。
【請求項20】
請求項1乃至13のいずれかに記載の画像処理装置と、
前記表示用画像データに基づく画像を表示する表示部とを含むことを特徴とする画像処理システム。
【請求項21】
赤外線撮像素子が二次元配列された撮像領域を備え、前記撮像領域の一部の領域では前記赤外線撮像素子の間隔が第1の間隔であり、前記撮像領域の前記一部の領域以外の領域では前記赤外線撮像素子の間隔が前記第1の間隔より広い第2の間隔である赤外線画像撮像部と、
前記赤外線画像撮像部で撮像された赤外線画像データを取得する画像取得部と、
前記画像取得部により取得された前記赤外線画像データの前記撮像領域に対応した画像領域に対して、前記赤外線画像データに基づいて対象物の検出処理を行い、前記検出処理の結果に基づいて表示用画像データを生成する処理部とを含むことを特徴とするカメラ。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【公開番号】特開2013−41481(P2013−41481A)
【公開日】平成25年2月28日(2013.2.28)
【国際特許分類】
【出願番号】特願2011−178705(P2011−178705)
【出願日】平成23年8月18日(2011.8.18)
【出願人】(000002369)セイコーエプソン株式会社 (51,324)
【Fターム(参考)】
【公開日】平成25年2月28日(2013.2.28)
【国際特許分類】
【出願日】平成23年8月18日(2011.8.18)
【出願人】(000002369)セイコーエプソン株式会社 (51,324)
【Fターム(参考)】
[ Back to top ]