
画像処理装置、画像処理方法、およびプログラム
【課題】監視カメラに対する妨害行為を検出できるようにする。
【解決手段】画像の画像データを取得し、取得された画像をN(N>1)個のブロックに分割し、新たな画像の画像データが取得される毎に、N個のブロックのうちのM(N≧M>1)個のブロックを、更新対象のブロックとして順次指定し、指定されたM個のブロックの画像データに所定のフィルタによるフィルタリングを施し、フィルタリング結果が、所定の値より大きい画素をカウントし、カウントされた画素の数と所定の値を比較することで、ブロックに異常があるか否かを判定し、異常があると判定された画像内のブロック数と所定の値を比較することで、妨害が発生したか否かが判定される。本技術は、例えば、監視システムに適用できる。
【解決手段】画像の画像データを取得し、取得された画像をN(N>1)個のブロックに分割し、新たな画像の画像データが取得される毎に、N個のブロックのうちのM(N≧M>1)個のブロックを、更新対象のブロックとして順次指定し、指定されたM個のブロックの画像データに所定のフィルタによるフィルタリングを施し、フィルタリング結果が、所定の値より大きい画素をカウントし、カウントされた画素の数と所定の値を比較することで、ブロックに異常があるか否かを判定し、異常があると判定された画像内のブロック数と所定の値を比較することで、妨害が発生したか否かが判定される。本技術は、例えば、監視システムに適用できる。
【発明の詳細な説明】
【技術分野】
【0001】
本技術は、画像処理装置、画像処理方法、およびプログラムに関する。詳しくは、監視カメラなどに加えられた妨害行為を検出できるようにする画像処理装置、画像処理方法、およびプログラムに関する。
【背景技術】
【0002】
所定の空間への人、動物などの侵入者を発見するために、監視カメラにより対象とされる空間を撮影し、撮影画像から侵入者を検知する監視システムが知られている。かかる監視システムは、監視カメラに布を被せる、監視カメラの向きを変える、監視カメラのレンズにスプレーをかける、などの妨害行為が行われると、監視ができなくなる。
【0003】
監視カメラに対してされた妨害行為を検知する技術として、監視カメラにより撮像された現在の画像と予め記憶されている参照画像(または過去画像)との類似度を演算したり、エッジ強度を演算したりして、妨害行為があったか否かを判定することが提案されている(例えば、特許文献1,2参照)。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特許04626632号公報
【特許文献2】特許04227539号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
上記した特許文献1および特許文献2によれば、妨害行為があったことを検知することはできる。しかしながら、妨害の種類を判定することは困難である。妨害の種類を判定することができることで、妨害を取り除くための対処が異なるため、妨害の種類までも判定することができることが望まれている。
【0006】
また、特許文献1では、動体による誤検知を抑えるために動体検出処理も処理に含めることが開示されている。しかしながら、動体が画面全体を覆うようなシーンでなければ検出することができず、より細かな状況に応じた検出を行うことは困難である。
【0007】
また、特許文献2では、領域毎に処理を行うことが提案されている。しかしながら、妨害あったか否かの判定の際に、全領域の結果の値を加算して全体の値を算出していたため、一部の領域に極端にエッジ強度が強い領域があると、判定結果が、その領域に依存してしまうことがあり、誤判定をしてしまう可能性があった。
【0008】
監視カメラに対する妨害行為を、誤検出なく、より精度良く検出できるようにし、妨害の種類が判別でき、適切な対応を即座に取れるようにすることが所望されている。
【0009】
本技術は、このような状況に鑑みてなされたものであり、監視カメラなどに妨害が加えられたときに、その妨害を精度良く検出し、さらに妨害の種類も判別することができるようにするものである。
【課題を解決するための手段】
【0010】
本技術の一側面の画像処理装置においては、画像の画像データを取得する取得部と、取得された前記画像をN(N>1)個のブロックに分割する分割部と、新たな前記画像の前記画像データが取得される毎に、N個の前記ブロックのうちのM(N≧M>1)個の前記ブロックを、更新対象の前記ブロックとして順次指定する指定部と、指定されたM個の前記ブロックの前記画像データに所定のフィルタによるフィルタリングを施すフィルタリング部と、前記フィルタリング部からのフィルタリング結果が、所定の値より大きい画素をカウントするカウント部と、前記カウント部によりカウントされた前記画素の数と所定の値を比較することで、前記ブロックに異常があるか否かを判定する第1の判定部と、前記第1の判定部により異常があると判定された前記画像内のブロック数と所定の値を比較することで、妨害が発生したか否かを判定する第2の判定部とを備える。
【0011】
前記カウント部は、前記フィルタリング結果が、前記所定の値より大きい画素の数をカウントした画素数と、前記フィルタリング結果が、前記所定の値以上であると判定された画素の値を加算した累積値を前記画素数で除算した平均値を算出し、前記第1の判定部は、前記画素数が所定の値より小さいか否かの第1の判定と、前記平均値が所定の値より小さいか否かの第2の判定を行い、前記第1の判定と前記第2の判定の論理和を判定結果とするようにすることができる。
【0012】
指定されたM個の前記ブロックの前記画像データのヒストグラムを生成するヒストグラム生成部と、生成された前記ヒストグラムを順次更新して保存するヒストグラム保存部と、生成されたM個の前記ブロックの前記ヒストグラムと、保存されていた対応する過去のM個の前記ブロックの前記ヒストグラムの類似度に基づいて、取得された前記画像の変化を判定する変化判定部と、前記ヒストグラムの正規化を行うか否かを判定する正規化判定部と、前記正規化判定部において正規化を行うと判定された場合に、生成されたM個の前記ブロックの前記ヒストグラムか、または保存されていた対応する過去のM個の前記ブロックの前記ヒストグラムのいずれか一方を正規化する正規化部とをさらに備え、前記変化判定部は、前記正規化部により前記ヒストグラムの正規化が行われた場合、正規化後の前記ヒストグラムを用いた類似度に基づいて、取得された前記画像の変化を判定し、変化があったと判定した場合、妨害があったと判定するようにすることができる。
【0013】
前記第2の判定部による判定結果と、前記変化判定部による判定結果を統合し、前記妨害の種類を判定するようにすることができる。
【0014】
本技術の一側面の画像処理方法は、画像の画像データを取得し、取得された前記画像をN(N>1)個のブロックに分割し、新たな前記画像の前記画像データが取得される毎に、N個の前記ブロックのうちのM(N≧M>1)個の前記ブロックを、更新対象の前記ブロックとして順次指定し、指定されたM個の前記ブロックの前記画像データに所定のフィルタによるフィルタリングを施し、フィルタリング結果が、所定の値より大きい画素をカウントし、カウントされた前記画素の数と所定の値を比較することで、前記ブロックに異常があるか否かを判定し、異常があると判定された前記画像内のブロック数と所定の値を比較することで、妨害が発生したか否かを判定するステップを含む。
【0015】
本技術の一側面のプログラムは、コンピュータに、画像の画像データを取得し、取得された前記画像をN(N>1)個のブロックに分割し、新たな前記画像の前記画像データが取得される毎に、N個の前記ブロックのうちのM(N≧M>1)個の前記ブロックを、更新対象の前記ブロックとして順次指定し、指定されたM個の前記ブロックの前記画像データに所定のフィルタによるフィルタリングを施し、フィルタリング結果が、所定の値より大きい画素をカウントし、カウントされた前記画素の数と所定の値を比較することで、前記ブロックに異常があるか否かを判定し、異常があると判定された前記画像内のブロック数と所定の値を比較することで、妨害が発生したか否かを判定するステップを含む処理を実行させるためのコンピュータ読み取り可能なプログラムである。
【0016】
本技術の一側面の画像処理装置、画像処理方法、並びにプログラムにおいては、取得された画像がN(N>1)個のブロックに分割され、新たな画像の画像データが取得される毎に、N個のブロックのうちのM(N≧M>1)個のブロックが、更新対象のブロックとして順次指定され、指定されたM個のブロックの画像データに所定のフィルタによるフィルタリングが施され、そのフィルタリング結果が、所定の値より大きい画素がカウントされ、そのカウントされた画素の数と所定の値が比較されることで、ブロックに異常があるか否かが判定される。そして、異常があると判定された画像内のブロック数と所定の値がさらに比較されることで、妨害が発生したか否かが判定される。
【発明の効果】
【0017】
本技術の一側面によれば、監視カメラなどに妨害が加えられたときに、その妨害を精度良く検出することができる。また妨害の種類も判別することができる。妨害の種類を判別することができるようになることで、妨害の除去に対する適切な対処を、ユーザが行いやすくなる。
【図面の簡単な説明】
【0018】
【図1】本発明の画像処理装置の一実施の形態の構成を示すブロック図である。
【図2】画像解析部の構成を示すブロック図である。
【図3】グローバルチェンジ検出部の詳細構成例を示すブロック図である。
【図4】正規化処理部の詳細構成例を示すブロック図である。
【図5】デフォーカス検出部の構成を示す図である。
【図6】正規化判定部の処理を説明する図である。
【図7】正規化値算出部の処理を説明する図である。
【図8】正規化部の処理を説明する図である。
【図9】正規化部の処理を説明する図である。
【図10】変化判定部の詳細構成例を示すブロック図である。
【図11】変化判定部の処理を説明する図である。
【図12】グローバルチェンジ検出部の処理を説明するフローチャートである。
【図13】更新するブロックの移動を説明する図である。
【図14】正規化処理の詳細を説明するフローチャートである。
【図15】ブロックの形状を示す図である。
【図16】ブロックの形状を示す図である。
【図17】デフォーカス検出部の処理を説明するフローチャートである。
【図18】検出結果の統合について説明するための図である。
【図19】検出結果の統合について説明するためのフローチャートである。
【図20】記録媒体について説明するための図である。
【発明を実施するための形態】
【0019】
以下に、本技術の実施の形態について図面を参照して説明する。
【0020】
[画像処理装置の構成]
図1は、本技術の画像処理装置の一実施の形態の構成を示すブロック図である。本技術は、監視カメラにより撮像される画像を解析し、監視カメラに対して加えられた妨害を検出する装置に適用できる。図1に示した画像処理装置11は、取得された画像に基づいて、監視カメラ(監視装置)に対する妨害行為を検出し、妨害行為が検出されたときアラームを出力する。
【0021】
ここで、監視カメラに関する妨害について説明する。監視カメラに関する妨害として、監視対象を視野外(撮影範囲外)にする妨害がある。この妨害は、監視カメラの向きを変える首振りと称される妨害や、監視カメラに布などを被せる覆いと称される妨害がある。このような監視対象を視野外にする妨害をここでは、グローバルチェンジと記述する。
【0022】
また、監視カメラのフォーカスをずらす妨害もある。この妨害としては、監視カメラのフォーカスをずらすフォーカスずらしや、監視カメラのズームをずらすズームずらしがある。このようなフォーカスをずらす妨害をここでは、デフォーカスと記述する。
【0023】
図1に示した画像処理装置11は、取得部21と画像処理部22により構成されている。画像の画像データを取得する取得手段としての取得部21は、CMOS(Complementary Metal Oxide Semiconductor)センサ、ビデオカメラなどの撮像部を内蔵し、撮像部が監視する対象空間などの被写体を撮影することで得られた画像データを取得し、出力する。取得部21はまた、ネットワークを介して外部から供給される画像データを取得することもできる。
【0024】
画像処理部22は、撮像信号処理部31、データ保存部32、および画像解析部33により構成される。撮像信号処理部31は、取得部21より得られた画像データに対して、黒レベル補正処理、ホワイトバランス処理、γ補正処理、色補正処理等の各種画像処理を施す。
【0025】
撮像信号処理部31は、例えばDSP(Digital Signal Processor)により構成される。データ保存部32は、撮像信号処理部31により処理された画像データを保存する。データ保存部32は、例えばRAM(Random Access Memory)により構成される。画像解析部33は、撮像信号処理部31より供給される現在の画像と、データ保存部32より供給される過去の画像である参照画像を解析することにより、妨害行為を検出する。画像解析部33は、例えばCPU(Central Processing Unit)により構成される。
【0026】
[画像解析部33の詳細構成]
図2は、画像解析部33の内部構成を示す図である。画像解析部33は、グローバルチェンジ検出部41、デフォーカス検出部42、および検出結果統合部43を含む。グローバルチェンジ検出部41は、上記したグローバルチェンジに係わる妨害を検出するための処理を行う。デフォーカス検出部42は、上記したデフォーカスに係わる妨害を検出するための処理を行う。検出結果統合部43は、グローバルチェンジ検出部41とデフォーカス検出部42からそれぞれ出力される検出結果を統合し、監視カメラに対する妨害行為の種類などを判別する。
【0027】
[グローバルチェンジ検出部41の詳細構成]
図3は、グローバルチェンジ検出部41の詳細構成例を示すブロック図である。グローバルチェンジ検出部41は、更新領域選択部61、ヒストグラム保存部62、画像分割部63、ヒストグラム生成部64、正規化処理部65、変化判定部66、変化領域保存部67、カウンタ部68、および閾値判定部69により構成されている。
【0028】
更新領域選択部61は、新たな画像の画像データが取得される毎に、N個のブロックのうちのM(N≧M>1)個のブロックを、更新するブロックとして順次指定する指定手段として機能する。この更新領域選択部61は、撮像信号処理部31から供給されるデータから、取得部21により取得された画像のフレーム番号を抽出し、更新するフレーム番号を決定する。さらに更新領域選択部61は、更新するフレームの中の更新するブロックを決定する。
【0029】
取得された画像をN(N>1)個のブロックに分割する分割手段としての画像分割部63は、撮像信号処理部31から供給される画像データに基づく各フレームの画像のうち、更新領域選択部61により指定されるフレームを複数のブロックに分割する。画像分割部63はまた、分割されたブロックのうち、更新領域選択部61により指定されるブロックの画像データを、ヒストグラム生成部64に供給する。
【0030】
取得された画像データのヒストグラムを生成するヒストグラム生成手段としてのヒストグラム生成部64は、画像分割部63から供給されたブロックのヒストグラムを生成する。なお、撮像信号処理部31がヒストグラム生成機能を備える場合がある。その場合には、ヒストグラム生成部64は撮像信号処理部31内に設けることができる。
【0031】
生成されたヒストグラムを順次更新して保存するヒストグラム保存手段としてのヒストグラム保存部62は、更新領域選択部61により更新領域として指定されるブロックのヒストグラムを更新する。すなわち、ヒストグラム生成部64から供給される現在のフレームの更新対象のブロックのヒストグラムにより、既に記憶されている過去のフレームの対応するブロックのヒストグラムが書き換えられる。
【0032】
正規化処理部65は、ブロックのヒストグラムを必要に応じて正規化する。正規化処理部65には、ヒストグラム生成部64から、現在のフレームの更新対象のブロックのヒストグラムが供給される。また、正規化処理部65には、ヒストグラム生成部64から供給されたブロックに対応する過去のヒストグラムが、ヒストグラム保存部62から供給される。正規化処理部65は、ヒストグラム生成部64から供給される現在のフレームの更新対象の各ブロックについてヒストグラムの正規化の要否を判定し、必要に応じて正規化する。なお、現在のフレームの更新対象のブロックのヒストグラムと、それに対応する過去のブロックのヒストグラムのどちらが正規化されるかは、ヒストグラムの状況に応じて判定される。
【0033】
取得された画像の変化を判定する変化判定手段としての変化判定部66は、生成された現在のヒストグラムと、保存されていた過去のヒストグラムの類似度に基づいて、変化判定処理を行う。変化判定部66は、類似度演算部71と閾値判定部72により構成されている。
【0034】
類似度演算部71は、現在と過去のヒストグラムの類似度を演算する類似度演算手段として機能する。即ち、類似度演算部71は、ヒストグラム生成部64から供給される現在のフレームの更新対象のブロックのヒストグラムと、それに対応する過去のブロックのヒストグラムとの類似度を演算する。
【0035】
類似度閾値判定手段としての閾値判定部72は、演算された類似度を類似度閾値と比較し、類似度が類似度閾値より大きいとき、ブロックの画像に変化があったと判定する。閾値判定部72は、ブロックの画像の変化についての判定結果(変化の有無)を、変化領域保存部67およびカウンタ部68に出力する。
【0036】
変化領域保存部67は、変化判定部66による判定結果を保存する。即ち、現在のフレームの更新対象のブロックの、過去のブロックに対する変化の有無が、新たな画像の画像データが取得される毎に、順次、変化領域保存部67に保存される。
【0037】
変化があったと判定されたブロックの数をカウントするカウント手段としてのカウンタ部68には、変化判定部66から、現在のフレームの更新対象のブロックの判定結果(変化の有無)が供給される。また、変化領域保存部67からは、現在のフレームの更新対象のブロック以外のブロックの判定結果が、カウンタ部68に供給される。カウンタ部68は、変化判定部66の出力と変化領域保存部67の出力に基づいて、1つの監視中の画像中の変化があったブロックの数をカウントする。
【0038】
カウントされた値をアラーム閾値と比較し、カウントされた値がアラーム閾値より大きいときアラームを出力するアラーム閾値判定手段としての閾値判定部69は、カウンタ部68によりカウントされたブロックの数を、予め決められている所定の閾値と比較する。カウントされたブロックの数が閾値より大きいとき、妨害行為が検出されたと判定し、検出信号が出力される。この検出信号は例えばアラームとすることができる。
【0039】
[正規化処理部65の詳細構成]
図4は、正規化処理部65の詳細構成例を示すブロック図である。正規化処理部65は、正規化判定部81、正規化値算出部82、平均値保存部83、および正規化部84により構成されている。
【0040】
正規化判定部81には、ヒストグラム生成部64から、現在のフレームの更新対象のブロックのヒストグラムが供給され、ヒストグラム生成部64から供給されたブロックに対応する過去のヒストグラムが、ヒストグラム保存部62から供給される。以下では、適宜、現在のフレームの更新対象のブロックのヒストグラムを現在のヒストグラム、過去のフレームの対応するブロックのヒストグラムを過去のヒストグラムと称する。
【0041】
正規化判定部81は、現在のフレームの更新対象のブロックに対して正規化を行うか否かを判定する。正規化判定部81は、正規化を行わない(行う必要がない)と判定した場合、入力された更新対象の各ブロックの現在のヒストグラムと過去のヒストグラムを、そのまま変化判定部66に供給する。正規化判定部81は、正規化を行う(必要がある)と判定した場合、入力された更新対象の各ブロックの現在のヒストグラムと過去のヒストグラムを、正規化値算出部82に供給する。
【0042】
正規化値算出部82は、入力された更新対象の各ブロックの現在のヒストグラムと過去のヒストグラムから、正規化に用いる正規化値を算出する。算出された正規化値は、更新対象の各ブロックの現在のヒストグラムと過去のヒストグラムとともに、正規化部84に供給される。
【0043】
平均値保存部83には、現在のフレームより前に計算された、更新対象のブロック以外のブロックの、ヒストグラムの平均値の変化の方向と変化率などが保存される。また、現在のフレームに対し正規化判定部81および正規化値算出部82で計算された同様の値も、次フレーム以降の処理のため、平均値保存部83に供給され、保存(更新)される。平均値保存部83に保存される値(ヒストグラムの平均値の変化の方向と変化率)の詳細については後述する。
【0044】
正規化部84は、正規化値算出部82で算出された正規化値に基づいて、更新対象の各ブロックの現在のヒストグラムか、または、過去のヒストグラムのいずれか一方を正規化する。これにより、現在のヒストグラムと過去のヒストグラムとで、ブロックの明るさを補正したヒストグラムを生成することができる。正規化部84は、正規化後の現在のヒストグラムと過去のヒストグラムを変化判定部66に出力する。
【0045】
なお、図4に示したような構成とすることで、性能を向上させることができる。すなわち、正規化判定部81を設け、上記および後述するように正規化を行うか否かを判定することで、全体の性能を向上させることができる。しかしながら、正規化判定部81を設けずに、全ての領域に関して正規化値算出部82による正規化値の算出が行われ、正規化部84で正規化が行われる構成とすることも可能である。また正規化判定部81を設けない構成とした場合、平均値保存部83も削除した構成とされる。すなわち、正規化処理部65は、正規化値算出部82と正規化部84から構成されるように構成することも可能である。
【0046】
[デフォーカス検出部42の詳細構成]
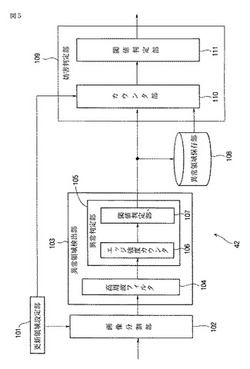
図5は、デフォーカス検出部42の詳細構成例を示すブロック図である。デフォーカス検出部42は、更新領域選択部101、画像分割部102、異常領域検出部103、高周波フィルタ104、異常判定部105、エッジ強度カウンタ106、閾値判定部107、異常領域保存部108、妨害判定部109、カウンタ部110、および閾値判定部111により構成されている。
【0047】
更新領域選択部101は、新たな画像の画像データが取得される毎に、N個のブロックのうちのM(N≧M>1)個のブロックを、更新するブロックとして順次指定する指定手段として機能する。この更新領域選択部101は、撮像信号処理部31から供給されるデータから、取得部21により取得された画像のフレーム番号を抽出し、更新するフレーム番号を決定する。さらに更新領域選択部101は、更新するフレームの中の更新するブロックを決定する。
【0048】
取得された画像をN(N>1)個のブロックに分割する分割手段としての画像分割部102は、撮像信号処理部31から供給される画像データに基づく各フレームの画像のうち、更新領域選択部101により指定されるフレームを複数のブロックに分割する。画像分割部102はまた、分割されたブロックのうち、更新領域選択部101により指定されるブロックの画像データを、異常領域検出部103の高周波フィルタ104に供給する。
【0049】
取得された画像データに対して、高周波フィルタによるフィルタリングを行うフィルタリング手段としての高周波フィルタ104は、画像分割部102から供給されたブロックに、所定の高周波フィルタによるフィルタリング処理を施す。
【0050】
取得された画像の異常を判定する異常判定手段としての異常判定部105は、エッジ強度カウンタ106と閾値判定部107により構成されている。エッジ強度カウンタ106は、エッジ強度が所定の閾値より大きい画素の数をカウントし、エッジ強度の平均値などを算出する算出手段として機能する。
【0051】
閾値判定手段としての閾値判定部107は、画素数や平均値を所定の閾値と比較し、閾値より大きいブロックの画像は異常があったと判定する。閾値判定部107は、ブロックの画像の異常についての判定結果(異常の有無)を、異常領域保存部108およびカウンタ部110に出力する。
【0052】
異常領域保存部108は、異常判定部105による判定結果を保存する。即ち、現在のフレームの更新対象のブロックの、過去のブロックに対する異常の有無が、新たな画像の画像データが取得される毎に、順次、異常領域保存部108に保存される。
【0053】
妨害判定部109は、カウンタ部110と閾値判定部111から構成されている。妨害判定部109は、監視カメラに対して妨害があったか否かを判定する。異常があったと判定されたブロックの数をカウントするカウント手段としてのカウンタ部110には、異常判定部105から、現在のフレームの更新対象のブロックの判定結果(異常の有無)が供給される。また、異常領域保存部108からは、現在のフレームの更新対象のブロック以外のブロックの判定結果が、カウンタ部110に供給される。カウンタ部110は、異常判定部105の出力と異常領域保存部108の出力に基づいて、1つの監視中の画像中の異常があったブロックの数をカウントする。
【0054】
カウントされた値をアラーム閾値と比較し、カウントされた値がアラーム閾値より大きいときアラームを出力するアラーム閾値判定手段としての閾値判定部111は、カウンタ部110によりカウントされたブロックの数を、予め決められている所定の閾値と比較する。カウントされたブロックの数が閾値より大きいとき、妨害行為が検出されたと判定し、検出信号が出力される。この検出信号は例えばアラームとすることができる。
【0055】
このように、本実施の形態においては、グローバルチェンジ検出部41とデフォーカス検出部42が設けられているため、それぞれの検出部で、グローバルチェンジに関する妨害と、デフォーカスに関する妨害を検出することができる。よって、種々の妨害を検出することができる。以下に、グローバルチェンジ検出部41とデフォーカス検出部42のそれぞれが行う処理についてさらに説明を加える。まず、グローバルチェンジ検出部41について説明する。
【0056】
[グローバルチェンジ検出部41の検出について]
グローバルチェンジ検出部41が行う妨害行為検出の原理(概要)について説明する。グローバルチェンジ検出部41は、過去の画像PIと、現在の画像NIをそれぞれ取得し、過去の画像PIと現在の画像NIのそれぞれを、所定の大きさのブロックに分割し、ブロック毎に画素値のヒストグラムを演算する。そして過去の画像PIの所定の位置のブロックのヒストグラムと、現在の画像NIの対応する位置のブロックのヒストグラムの類似度が演算される。類似度が低いブロックは、変化領域VIとして検出され、変化領域VIの数が多い場合、妨害行為があったと判定され、アラームが出力される。次に、グローバルチェンジ検出部41を構成するここのブロックが行う処理について説明する。
【0057】
[正規化判定部81の処理]
図6を参照して、正規化判定部81の処理について説明する。正規化判定部81には、現在のフレームの更新対象の各ブロックについて、現在のヒストグラムと、過去のヒストグラムが供給される。図6の例では、画像が16個のブロックに分割され、斜線で示される4個のブロックが、現在のフレームでの更新対象のブロックを示している。
【0058】
正規化判定部81は、現在のフレームの更新対象の各ブロックについて、現在のヒストグラムと過去のヒストグラムそれぞれの平均値を算出し、過去から現在への平均値の変化の方向が、増加、減少、または変動なし、のいずれであるかを判定する。例えば、過去と現在のヒストグラムの平均値の差(絶対値)が、所定の範囲TH以内であれば変動なし、所定の範囲THより大であれば、その変化の方向に応じて増加または減少とすることができる。
【0059】
正規化判定部81はまた、現在のフレームの更新対象ではないブロックについて、同様に判定したときの判定結果(変化の方向)を、平均値保存部83から取得する。そして、正規化判定部81は、画面全体の変化として、増加、減少、変動なし、のいずれであるかを判定する。例えば、画面全体のブロック数に対する増加(減少)のブロック数が、予め設定した所定の比率以上であれば、画面全体として増加(減少)の変化であると判定することができる。
【0060】
図6右側の図は、プラス(+)が付されたブロックは変化の方向が増加であるブロックを示し、マイナス(−)が付されたブロックは変化の方向が減少であるブロックを示している。無印のブロックは変動なしのブロックである。図6右側のフレームは、画面全体としては、増加の変化が見られたフレームと判定される。
【0061】
画面全体として、ヒストグラムの平均値の変化の方向が、増加または減少のどちらかに一定以上偏っている場合、画面全体が明るくなった、または暗くなったことを意味する。この場合、AE機能や照明による画像全体の輝度の変化、もしくは、監視カメラが隠されるなどの妨害行為により、画面全体の輝度が変化したと考えられ、正規化を行った方がよい。一方、画面全体としてのヒストグラムの平均値の変化がない場合や、平均値の増加および減少に偏りが見られない場合には、正規化を行わない方がよい。
【0062】
このような場合には、画像に変化がない、画面の一部に動体が入るなどして変化した、または、監視カメラの向きを変えられるなどの妨害行為が行われたなどが考えられ、正規化することにより偶然ヒストグラムの形が一致する領域が多くなることがある。その結果、かえって妨害行為を検出できなくなる事態が考えられるので、これを防止するためである。
【0063】
以上より、正規化判定部81は、画面全体として、ヒストグラムの平均値の変化の方向が、増加または減少のどちらかに一定以上偏っている場合、正規化を行う必要があると判定する。一方、画面全体としてヒストグラムの平均値に変動がない場合や、平均値の増加および減少に偏りが見られない場合には、正規化を行う必要がないと判定する。
【0064】
[正規化値算出部82の処理]
図7を参照して、正規化値算出部82の処理について説明する。正規化値算出部82は、画面全体のヒストグラムの平均値の変化の方向が、増加または減少のどちらかに一定以上偏っている場合に、画面全体で、どの程度変化したのかを表す変化の比率(以下、変化率と記載する)を求め、それを正規化値とする。
【0065】
最初に、正規化値算出部82は、各ブロックで、現在のヒストグラムと過去のヒストグラムそれぞれの平均値を算出する。現在のフレームの更新対象の各ブロックについては、供給されるヒストグラムから平均値を算出する。現在のフレームの更新対象のブロック以外のブロックの現在と過去のヒストグラムの平均値は、既に計算されて保存されている平均値保存部83から取得される。
【0066】
次に、正規化値算出部82は、画面全体のなかから有効領域を決定する。ここで、正規化判定部81において画面全体の変化の方向が増加であると判定された場合には、ブロックの変化の方向が増加であるブロックの各領域が有効領域とされる。そして、正規化値算出部82は、有効領域とされた各ブロックについて、現在のヒストグラムの平均値を、過去のヒストグラムの平均値で除算し、その結果を変化率とする。これにより、有効領域とされた各ブロックについて変化率が求まる。
【0067】
なお、画面全体の変化の方向が増加であると判定された場合、ブロックの変化の方向が増加であるブロックの各領域が有効領域とされるが、増加率が所定値以上に大きい、換言すれば極端に明るくなったブロックも有効領域から除外される。変動なしのブロック、平均値の変化の方向が減少のブロック、極端に明るくなったブロックが有効領域から除外されるのは、そのブロックに、AE機能によって明るさが変化した原因の動体が存在する可能性が高いためである。
【0068】
図7において、斜線が付されたブロックが有効領域とされたブロックを示している。
【0069】
これに対して、正規化判定部81において画面全体の変化の方向が減少であると判定された場合には、ブロックの変化の方向が減少であるブロックの各領域が有効領域とされる。そして、正規化値算出部82は、有効領域とされた各ブロックについて、過去のヒストグラムの平均値を、現在のヒストグラムの平均値で除算し、その結果を変化率とする。これにより、画面全体の変化の方向が減少であると判定された場合も、有効領域とされた各ブロックについて変化率が求まる。
【0070】
最後に、正規化値算出部82は、有効領域とされた各ブロックについて求めた変化率の平均値を算出し、その結果を正規化値に決定する。
【0071】
以上のように、有効領域を決定し、その変化率の平均値を求めることで、動体領域の影響を除外した画面全体の変化率を求め、正規化値とするので、後段の正規化部84において、正規化を精度良く行うことができる。
【0072】
[正規化部84の処理]
図8と図9を参照して、正規化部84の処理について説明する。正規化部84は、現在のフレームの更新対象のブロックの、現在と過去のヒストグラム間で、正規化値算出部82で算出された正規化値を用いたストレッチングを行う。正規化判定部81において画面全体の変化の方向が増加である、即ち、画面全体で明るくなったと判定された場合には、過去のヒストグラムを引き延ばし、逆に画面全体で暗くなったと判定された場合には、現在のヒストグラムを引き延ばすストレッチングが行われる。即ち、過去と現在のヒストグラムのうち、暗い側のヒストグラムがストレッチングされる。
【0073】
図8は、現在のフレームの更新対象のあるブロックの現在と過去のヒストグラムを示している。ヒストグラムの横軸は輝度、縦軸は度数(所定の範囲の輝度値を有する画素の個数)を示している。
【0074】
図8Aに示される現在のヒストグラムの平均値は5で、面積は8である。一方、図8Bに示される過去のヒストグラムの平均値は10で、面積は8である。このような現在と過去のヒストグラムの関係は、例えば、同じ被写体で照明(太陽光)が暗くなった場合などのときに起こり得る。このような現在と過去のヒストグラムに対し、正規化を行わず変化の有無を判定すれば、ヒストグラムの重なりの程度で類似度を判定する変化判定部66において、変化ありと判定される。しかし、単に照明によるヒストグラムの変化であるならば、変化ありの判定は誤判定である。
【0075】
そこで、正規化部84は、図9に示すような、正規化値算出部82で算出された正規化値を用いて現在のヒストグラムを引き延ばすストレッチングを行う。具体的には、正規化部84は、現在のヒストグラムを正規化値で横軸方向(輝度方向)に引き延ばす。
【0076】
図9の例は、正規化値が「2」である場合の例である。ストレッチング前の輝度値は「4」、「5」、及び「6」しかないので、2倍すると、「8」、「10」、及び「12」のみとなるが、それ以外輝度値の度数についても、周辺の度数から補間して求められる。
【0077】
ヒストグラムを引き延ばすと、ヒストグラムの面積が増えてしまうため、次に、正規化部84は、正規化の前後で面積が同一となるようにヒストグラムの度数を調整する。図9の例では、現在のヒストグラムのストレッチング後の面積が「16」であり、ストレッチング前の面積が「8」であるので、ストレッチング後の現在のヒストグラムの各輝度値の度数が、「8/16=1/2倍」される。これにより、正規化後の現在のヒストグラムの面積は正規化前と同一の「8」となる。
【0078】
以上のように、画面全体の変化の方向に応じて、現在または過去のヒストグラムが正規化される。そして、正規化後のヒストグラムが変化判定部66に出力される。
【0079】
[変化判定部66の処理]
図10と図11を参照して、変化判定部66が行う、ブロックの画像の変化の有無の判定について説明する。図10は、類似度演算部71に供給される現在のヒストグラムと過去のヒストグラムの例を示している。即ち、図10Aのヒストグラムh1は、現在のヒストグラムの例であり、図10Bのヒストグラムh0は、過去のヒストグラムの例である。なお、横軸は輝度値に代表される画素値を表し、縦軸は所定の範囲の画素値を有する画素の個数(度数)を表している。
【0080】
図10に示すような現在のヒストグラムh1と過去のヒストグラムh0に対して、類似度演算部71において、インタセクションを用いた次式(1)により、類似度が演算される。
D=Σmin(Ai,Bi) ・・・・・・・・(1)
【0081】
式(1)のAi,Biは、それぞれ現在のヒストグラムh1の1つの画素値と、過去のヒストグラムh0の1つの画素値を表している。従って、式(1)によれば、各画素値において、画素の数値(画素値)が小さい方の和が求められる。この比較処理は、直近の過去のN(N>1)フレームについて行われる。
【0082】
図11Aに示されるように、現在のヒストグラムh1と過去のヒストグラムh0の殆どが重なっている場合、式(1)で演算される値Dは、大きくなる。それに対して、図11Bに示されるように、現在のヒストグラムh1と過去のヒストグラムh0の重なりが少ない場合、値Dは小さくなる。即ち、式(1)の値Dは、類似度が高いとき大きくなり、類似度が低いとき小さくなる。
【0083】
次に、図12のフローチャートを参照して、画像処理装置11のグローバルチェンジ検出部41による妨害行為検出処理について説明する。初めに、ステップS1において、取得部21はカメラ画像を取得する。すなわち撮像部が所定の監視対象を撮像しており、その撮像画像の画像データが取得される。
【0084】
ステップS2において、画像分割部63は、N個のブロックに画像を分割する。この実施の形態においては、画像データに基づく各フレームの画像が8×8個のブロックに分割される。ステップS3において、更新領域選択部61は、更新領域(更新対象のブロック)を選択する。すなわち、8×8個のブロックのうちの所定のM(M≦N)個のブロックが、更新対象のブロックとして選択される。この更新領域の選択について、図13を参照して説明する。
【0085】
図13は、更新するブロックの移動を説明する図である。この実施の形態においては、M=4とされ、8×8個のブロックが4×4個のブロックからなる4個のグループに区分される。そして、各グループから1個のブロックが選択されて、合計4個のブロックが更新対象のブロックとして選択される。具体的には、図13Aに示されるように、更新領域選択部61は、最初のフレームの8×8個のブロックのうちの、1行目の最も左側に位置するブロックb11、最も右側に位置するブロックb18、8行目の最も左側に位置するブロックb81、最も右側に位置するブロックb88の4つのブロックを更新ブロックとして選択する。
【0086】
なお、図13において、上からi番目の行に位置し、左からj番目の列に位置するブロックを、bijのように表す。後述する図15、図16においても同様とする。
【0087】
次の更新領域を選択するステップでは、図13Bに示されるように、更新領域選択部61は、次のフレームの8×8個のブロックのうちの、ブロックb11の1つ右側に位置するブロックb12、ブロックb18の1つ左側に位置するブロックb17、8行目のブロックb81の1つ右側に位置するブロックb82、ブロックb88の1つ左側に位置するブロックb87の4つのブロックを更新ブロックとして選択する。
【0088】
次の更新領域を選択するステップでは、図13Cに示されるように、更新領域選択部61は、次のフレームの8×8個のブロックのうちの、1行目のブロックb12の1つ右側に位置するブロックb13、ブロックb17の1つ左側に位置するブロックb16、8行目のブロックb82の1つ右側に位置するブロックb83、ブロックb87の1つ左側に位置するブロックb86の4つのブロックを更新ブロックとして選択する。
【0089】
次の更新領域を選択するステップでは、図13Dに示されるように、更新領域選択部61は、次のフレームの8×8個のブロックのうちの、1行目のブロックb13の1つ右側に位置するブロックb14、ブロックb16の1つ左側に位置するブロックb15、8行目のブロックb83の1つ右側に位置するブロックb84、ブロックb86の1つ左側に位置するブロックb85の4つのブロックを更新ブロックとして選択する。
【0090】
以上のようにして最上行と最下行におけるブロックの選択、移動が終了すると、次の更新領域を選択するステップでは、第2行目と第7行目とが選択される。そして図13Eに示されるように、更新領域選択部61は、次のフレームの8×8個のブロックのうちの、2行目の最も左側に位置するブロックb11、最も右側に位置するブロックb28、7行目の最も左側に位置するブロックb71、最も右側に位置するブロックb78の4つのブロックを更新ブロックとして選択する。
【0091】
次の更新領域を選択するステップでは、図13Fに示されるように、更新領域選択部61は、次のフレームの8×8個のブロックのうちの、2行目のブロックb11の1つ右側に位置するブロックb22、ブロックb28の1つ左側に位置するブロックb27、7行目のブロックb71の1つ右側に位置するブロックb72、ブロックb78の1つ左側に位置するブロックb77の4つのブロックを更新ブロックとして選択する。
【0092】
以下、同様の手順により、更新対象のブロックとして、1フレームにおいて4個のブロックが順次選択される。すなわち、左側半分の上側半分の領域においては、行内においては左から右方向に、そして行は上から下方向に順次選択される。右側半分の上側半分の領域においては、行内においては右から左方向に、そして行は上から下方向に順次選択される。左側半分の下側半分の領域においては、行内においては左から右方向に、そして行は下から上方向に順次選択される。右側半分の下側半分の領域においては、行内においては左から右方向に、そして行は下から上方向に順次選択される。
【0093】
なお、図13に示した領域の移動順序は、一例であり、限定を示すものではない。4×4個のブロックからなる4個のグループに区分され、そのグループ内で、更新ブロックが上記したように、順次、選択されるとして説明したが、上記した説明のような選択に限定されるわけではない。例えば、図13Aに示したように、更新ブロックの開始位置は、左上のブロックb11、右上のブロックb18、左下のブロックb81、および右下のブロックb88が、それぞれ選択されるとして説明したが、各グループ内の、例えば右上にあるブロックが更新ブロックの開始位置とされても良い。
【0094】
また、同じような規則に基づいて各グループ内の更新ブロックが選択されなくても良い。例えば、横方向に更新ブロックが選択されるグループ、縦方向に更新ブロックが選択されるグループ、ジグザグに更新ブロックが選択されるグループなど、グループ毎に異なる規則で更新ブロックが選択されるようにしても良い。
【0095】
また、規則としてランダムに選択する規則もある。ランダムに更新ブロックが選択される場合、それぞれのグループで、ランダムな位置が選択されるようにしても良いし、ランダムに選択された位置が、全てのグループに適用されるようにしても良い。前者の場合は、例えば、右上、左下、右上から横方向に2番目、中央、といったように、各グループ内で選択される更新ブロックの位置は異なる。後者は、例えば、ランダムに設定された位置が右上であれば、各グループの右上に位置するブロックが更新ブロックとされる。
【0096】
また、グローバルチェンジ検出部41とデフォーカス検出部42は、それぞれ、図13に示した一例としての更新ブロックの選択に基づいて更新ブロックを選択し、その更新ブロック内に変化(異常)があるか否かを判定する。監視カメラにより撮像される1画像内で、何らかの妨害があったときに、変換(異常)が検出されやすい領域(ブロック)がある場合、その領域が他の領域よりも多く選択されるようにしても良い。換言すれば、各グループ内のブロックの全てが同一時間内に同一回数選択されるようにしても良いし、異なる回数選択されるようにしても良い。
【0097】
図12に示したフローチャートの説明に戻る。ステップS4において、ヒストグラム生成部64は、更新領域のヒストグラムを生成する。ステップS5において、ヒストグラム保存部62は、ステップS4で生成されたヒストグラムを保存する。ヒストグラム保存部62は、過去のデータをヒストグラムとして保存するので、例えば画素値などの画像データとして保存する場合に比べて、記憶容量を小さくし、低コスト化することができる。
【0098】
ステップS6において、正規化処理部65は、ヒストグラム生成部64から供給される現在のフレームの更新対象のブロックのヒストグラムに基づいて正規化の要否を判定し、必要に応じて正規化する正規化処理を実行する。
【0099】
ステップS7において、類似度演算部71は、現在のフレームの更新対象の各ブロックについて、現在のヒストグラムと、それに対応する過去のヒストグラムとの類似度を演算する。なお、ステップS6で正規化を行うと判定された場合には、正規化後のヒストグラムを用いて類似度が演算される。
【0100】
ステップS8において、閾値判定部72は、現在のフレームの更新対象の各ブロックについて、変化領域であるか否かを判定する。すなわち、ステップS7で演算された類似度Dが、予め定められた所定の閾値Thdと比較される。類似度Dが閾値Thdより小さいとき、そのブロックは変化があった領域であると判定される。直近の過去のNフレームのうち、類似度Dが閾値Thdより小さいフレームが1フレームでもあった場合、領域に変化があったと判定される。
【0101】
ステップS9において、変化領域保存部67は、現在のフレームの更新対象の各ブロックについて、判定結果を更新する。すなわち変化領域保存部67は、ブロック毎に1フレーム分の判定結果(つまり、ブロック数分の判定結果)を保存しており、ステップS8での判定結果により古い判定結果を更新する。
【0102】
ステップS10において、カウンタ部68は、全領域の変化領域数をカウントする。即ち、変化判定部66からの、現在のフレームの更新対象のブロックの判定結果(変化の有無)と、変化領域保存部67からの、現在のフレームの更新対象のブロック以外のブロックの判定結果とに基づいて、監視対象の画像のフレームを構成する64個のブロック全体で、変化領域とされるブロックの数がカウントされる。
【0103】
ステップS11において、閾値判定部69は、カウントされた変化領域数が閾値より大きいかを判定する。より具体的には、ステップS10でカウントされた変化領域とされたブロックの数が、予め定められている所定の閾値Thcと比較される。
【0104】
ステップS11で、カウントされた変化領域数が閾値より大きいと判定された場合、処理はステップS12に進み、閾値判定部69は、妨害行為があったことを示すアラームなどの信号を出力する。一方、ステップS11で、カウントされた変化領域数が閾値以下であると判定された場合、およびステップS12の処理の後、妨害行為検出処理は終了する。
【0105】
以上の処理は、フレーム毎に実行される。
【0106】
[正規化処理の詳細]
図14は、図12のステップS6として実行される正規化処理の詳細なフローチャートである。この処理では、初めに、ステップS31において、正規化判定部81は、更新対象の各ブロックについて、現在のヒストグラムと過去のヒストグラムそれぞれの平均値を算出する。
【0107】
ステップS32において、正規化判定部81は、更新対象の各ブロックについて、ヒストグラムの平均値の変化方向を判定する。即ち、正規化判定部81は、更新対象の各ブロックについて、過去から現在へのヒストグラムの平均値の変化の方向が、増加、減少、または変動なし、のいずれであるかを判定する。
【0108】
ステップS33において、正規化判定部81は、画面全体について変化方向をカウントする。具体的には、正規化判定部81は、更新対象ではないブロックについて同様に判定したときの判定結果を平均値保存部83から取得し、更新対象の各ブロックの判定結果とともに、画面全体について、増加、減少、変動なし、のそれぞれのブロック数がカウントされる。
【0109】
ステップS34において、正規化判定部81は、画面全体として、増加または減少のどちらかに一定以上の偏りがあるかを判定する。ステップS34で、増加および減少のいずれにも一定以上の偏りがないと判定された場合、処理はステップS35に進み、正規化判定部81は、更新対象の各ブロックの現在と過去のヒストグラムそれぞれを、そのまま変化判定部66に出力する。
【0110】
一方、ステップS34で、増加または減少のどちらかに一定以上の偏りがあると判定された場合、処理はステップS36に進み、正規化判定部81は、更新対象の各ブロックの現在と過去のヒストグラムそれぞれを正規化値算出部82に供給する。そして、正規化値算出部82は、画面全体から異常領域を除外した有効領域の各ブロックの変化率を算出する。
【0111】
より具体的には、更新対象の各ブロックについて、現在と過去のヒストグラムそれぞれの平均値が算出される。また、更新対象のブロック以外のブロックについては、現在と過去のヒストグラムそれぞれの平均値が平均値保存部83から取得される。そして、画面全体の変化方向に応じて有効領域が決定され、有効領域とされた各ブロックについて過去のヒストグラムの平均値と現在のヒストグラムの平均値の一方を他方で除算することにより、有効領域の各ブロックの変化率が求められる。
【0112】
ステップS37において、正規化値算出部82は、有効領域とされた各ブロックについて求めた変化率の平均値を算出し、その結果を正規化値に決定する。ステップS38において、正規化部84は、ステップS37で算出された正規化値を用いて、現在または過去のヒストグラムを引き延ばすストレッチングを行う。
【0113】
ステップS39において、正規化部84は、引き延ばしたヒストグラムに対し、正規化の前後で面積が同一となるように調整する。即ち、ストレッチング前後の面積倍率の逆数を、引き延ばしたヒストグラムの各輝度値の度数に乗算することで、正規化の前後で面積が同一となるように調整される。
【0114】
ステップS40において、正規化部84は、正規化後のヒストグラムを変化判定部66に出力する。即ち、正規化部84は、正規化された現在または過去のヒストグラムと残りの一方を、変化判定部66に出力する。
【0115】
ステップS40の処理後、または、ステップS35の処理後、正規化処理は終了し、図12の妨害行為検出処理に戻る。
[ブロックの形状]
上記した図13に示す実施の形態においては、ブロックを横長の形状として、その長手方向、すなわち横方向に移動させるようにしたが、このような形状に本技術の適用が限定されるのではない。例えば、ブロックの形状を、移動方向と垂直な方向に長い形状にすることができる。換言すれば、ブロックをその長手方向と垂直な方向に移動させることができる。
【0116】
図15は、ブロックの形状を示す図である。図15においては、画面が上半分と下半分に区分され、それぞれが8個のブロックb11乃至b18,b21乃至b28に分割されている。その結果、各ブロックは縦長の形状とされている。そして更新時のブロックの移動方向は、長手方向と垂直な方向、すなわち横方向とされている。例えば撮像部が横方向にしか移動できないなどの理由で、妨害行為が横方向に限られる場合、横方向の移動のみが検出できればよい。そこで、図15に示されるように、変化の方向に対して平行な辺より垂直な辺が長くなる形状のブロックとすることができる。
【0117】
図16は、ブロックの形状を示す図である。図16においては、画面が左半分と右半分に区分され、それぞれが8個のブロックb11乃至b81,b12乃至b82に分割されている。その結果、各ブロックは横長の形状とされている。そして更新時のブロックの移動方向は、長手方向と垂直な方向、すなわち縦方向とされている。例えば撮像部が縦方向にしか移動できないなどの理由で、妨害行為が縦方向に限られる場合、縦方向の移動のみが検出できればよい。そこで、図16に示されるように、変化の方向に対して平行な辺より垂直な辺が長くなる形状のブロックとすることができる。
【0118】
以上のように、正規化処理によれば、正規化を行うか否かを判定し、必要に応じてヒストグラムの正規化が行われる。具体的には、画面全体の変化の方向に増加または減少の一定以上の偏りがある場合に、ヒストグラムの正規化が行われる。これにより、AE機能や照明変化などに起因する、妨害行為の誤検出を抑制することができる。また、一律に全てのヒストグラムを正規化した場合に生じる妨害行為の検出漏れを抑制することができる。さらに、ヒストグラムを正規化する際には、正規化値として、変化の方向が画面全体の変化の方向と異なる領域を除外した変化率を算出することで、精度良く正規化を行うことができる。
【0119】
このようにして、グローバルチェンジ検出部41により、グローバルチェンジに関する妨害、すなわち、監視カメラの向きを変えたり、布などを被せたりする妨害を、精度良く検知することが可能となる。次に、デフォーカス検出部42による処理について説明する。
【0120】
[デフォーカス検出部42の処理について]
次に、図17のフローチャートを参照して、画像処理装置11のデフォーカス検出部42による妨害行為検出処理について説明する。初めに、ステップS51において、取得部21はカメラ画像を取得する。すなわち撮像部が所定の監視対象を撮像しており、その撮像画像の画像データが取得される。
【0121】
ステップS52において、画像分割部102は、N個のブロックに画像を分割する。この実施の形態においては、画像データに基づく各フレームの画像が8×8個のブロックに分割される。ステップS53において、更新領域選択部101は、更新領域(更新対象のブロック)を選択する。すなわち、8×8個のブロックのうちの所定のM(M≦N)個のブロックが、更新対象のブロックとして選択される。この更新領域の選択は、図13を参照して説明した場合と同様に行うことが可能であるため、ここではその説明を省略する。
【0122】
ステップS51乃至S53の処理は、図12に示したフローチャートのステップS1乃至S3と同様に行われる。換言すれば、デフォーカス検出部42の更新領域設定部101と画像分割部102による処理は、図3に示したグローバルチェンジ検出部41の更新領域設定部61と画像分割部63による処理と同様の処理とすることができる。
【0123】
よって、デフォーカス検出部42の更新領域設定部101と画像分割部102が、グローバルチェンジ検出部41の更新領域設定部61と画像分割部63と共用される構成とすることも可能である。例えば、図5に示したデフォーカス検出部42の更新領域設定部101と画像分割部102を、デフォーカス検出部42から削除した構成とし、グローバルチェンジ検出部41の更新領域設定部61から更新領域の設定を受け、画像分割部63から分割された画像領域の画像群の供給を受ける構成とすることも可能である。
【0124】
勿論、グローバルチェンジ検出部41とデフォーカス検出部42が、それぞれ異なる領域を処理する、異なる大きさの領域を処理するなどの場合、図3と図5にそれぞれ示したように、グローバルチェンジ検出部41とデフォーカス検出部42がそれぞれ構成される。また、グローバルチェンジ検出部41とデフォーカス検出部42が、それぞれフレーム毎に処理する領域数が異なっていても良く、異なる領域数が処理される場合には、図3と図5にそれぞれ示したように、グローバルチェンジ検出部41とデフォーカス検出部42がそれぞれ構成される。
【0125】
例えば、グローバルチェンジ検出部41は、1フレームを4つのグループに分割し、それぞれのグループから、1領域(1ブロック)を処理対象とし、合計4領域を処理対象として処理する(図13を参照して説明したように処理する)。これに対して、デフォーカス検出部42は、グローバルチェンジ検出部41と同じく、1フレームを4つのグループに分割し、それぞれのグループから、1領域(1ブロック)を処理対象とするが、全てのブロックを順次処理対象として処理を行うようにしても良い。
【0126】
ステップS54において、高周波フィルタ104は、更新領域を所定のフィルタでフィルタリングする。このフィルタリング処理が施されることで、更新領域内のエッジが抽出される。ステップS55において、エッジ強度カウンタ106は、処理対象とされている領域から算出されたエッジの強度をカウントする。そして、そのカウント値を用いて、ステップS56において、閾値判定部107は、現在のフレームの更新対象の各ブロックについて、異常領域であるか否かを判定する。この高周波フィルタ104、異常判定部105(エッジ強度カウンタ106と閾値判定部107)の処理について、説明を加える。
【0127】
高周波フィルタ104は、入力された所定領域内の画像に含まれる高周波成分を抽出する。例えば、高周波フィルタ104の伝達関数HをZ変換で表現すると、下記の式(2)により表現される。但し、表記を簡単にするため、同式は1次元で表現されているが入力画像は2次元であるため、実際には同式を2次元に拡張したものが用いられる。
【0128】
【数1】

【0129】
なお、ウェーブレット変換等の変換処理を用いて高周波成分を抽出するように高周波フィルタ104が構成されていてもよい。高周波フィルタ104で抽出された入力画像の高周波成分は、入力画像(処理対象とされている領域内の画像)のエッジ強度を表す。このようなエッジ強度は、エッジ強度カウンタ106に入力される。エッジ強度カウンタ106においては、高周波フィルタ104を通過した高周波成分の領域内で周波数成分の値が算出される。
【0130】
エッジ強度カウンタ106は、算出した周波数成分の値が所定の閾値(以下、高周波閾値)を越える画素の個数をカウントする。また領域内の各画素の高周波成分の値を加算することで累積値を算出する。すなわち、エッジ強度カウンタ106は、領域内のエッジ強度の高い画素の画素数と、領域内のエッジ強度の累積値を算出する。
【0131】
さらに累積値は、エッジ強度の高い画素数で除算されることで平均値が算出され、その平均値が以下の処理に用いられる。
エッジ強度の平均値=累積値/エッジ強度の高い画素数
なお、エッジ強度の高い画素数が0の場合、すなわち、算出された周波数成分の値が高周波閾値を超えた画素が無かった場合、エッジ強度の平均値は0として扱われる。
【0132】
この画素数と累積値が、閾値判定部107により所定の閾値と比較されることで、処理対象とされている領域に異常が生じているか否かが判定される。閾値判定部107は、以下の判定式を有している。
判定式1 エッジ強度が閾値より高い画素数<画素数の閾値(defocus consensus rate)
判定式2 エッジ強度の平均値<エッジ強度値の閾値(defocus noise th)
【0133】
判定式1は、エッジ強度が低い画素数が多いか否かを判定するための式である。監視カメラのフォーカスがずらされると、ぼやけた画像が撮像され、そのために、エッジ自体もぼやけ、エッジ強度の低い画素値が多い領域となる可能性がある。判定式1では、このような状況を検出するための式である。
【0134】
判定式2は、エッジ強度が全体的に低い領域であるか否かを判定するための式である。監視カメラのフォーカスがずらされていない状態であれば、ピントがあった画像が撮像されるため、エッジが存在する領域は、エッジ強度の累積値は高くなり、エッジ強度の高い画素数は少なくなる傾向にある。よってピントが合っている画像の所定の領域においては、エッジ強度の平均値は、高い値となる傾向にある。
【0135】
これに対して、監視カメラのフォーカスがずらされると、ぼやけた画像が撮像され、そのために、エッジが抽出されづらい画像(領域)となり、エッジが広がったようなぼけた領域となる。このような領域においては、エッジが存在する領域であっても、エッジ強度の累積値は低くなり、エッジ強度の高い画素数は多くなる傾向にある。よって、ピントが合っていない画像の所定の領域においては、エッジ強度の平均値は低い値となる傾向にある。
【0136】
閾値判定部107は、判定式1または判定式2のいずれか一方が少なくとも満たされるとき、処理対象とされた領域には、異常があると判定する。すなわち、閾値判定部107は、判定式1と判定式2の論理和を取り、その論理和を判定結果として、後段のカウンタ部110(図5)に出力する。
【0137】
図17のフローチャートの説明に戻り、ステップS56において、異常領域であるか否かが判定されると、ステップS57において、異常領域保存部108は、現在のフレームの更新対象の各ブロックについて、判定結果を更新する。すなわち異常領域保存部108は、ブロック毎に1フレーム分の判定結果(すなわち、ブロック数分の判定結果)を保存しており、ステップS56での判定結果により古い判定結果を更新する。
【0138】
ステップS58において、カウンタ部110は、全領域の異常領域数をカウントする。即ち、異常判定部105からの、現在のフレームの更新対象のブロックの判定結果(変化の有無)と、異常領域保存部108からの、現在のフレームの更新対象のブロック以外のブロックの判定結果とに基づいて、監視対象の画像のフレームを構成する64個のブロック全体で、異常領域とされるブロックの数がカウントされる。
【0139】
ステップS59において、閾値判定部111は、カウントされた異常領域数が閾値より大きいかを判定する。より具体的には、ステップS59でカウントされた異常領域とされたブロックの数が、予め定められている所定の閾値Thcと比較される。ここでは、予め定められている所定の閾値Thcと比較されるとして説明を続けるが、所定数前のフレームの異常領域の数を閾値Thcとすることも可能である。
【0140】
ステップS59で、カウントされた異常領域数が閾値より大きいと判定された場合、処理はステップS60に進み、閾値判定部111は、妨害行為があったことを示すアラームなどの信号を出力する。ただし、ステップS60において出されるアラームは、後段の処理部に妨害行為が行われた可能性のあることを知らせる信号である。一方、ステップS59で、カウントされた異常領域数が閾値以下であると判定された場合、およびステップS60の処理の後、デフォーカス検出処理は終了する。
【0141】
以上の処理は、フレーム毎に実行される。
【0142】
このようにして、デフォーカス検出部42により、デフォーカスに関する妨害、すなわち、監視カメラのフォーカスをずらしたり、ズームをずらしたりする妨害を、精度良く検知することが可能となる。
【0143】
[妨害検知の統合について]
ここで、再度図2を参照する。図2に示したように、本実施の形態においては、監視カメラに対する妨害のうちのグローバルチェンジに関する妨害を検出するグローバルチェンジ検出部41と、監視カメラに対する妨害のうちのデフォーカスに関する妨害を検出するデフォーカス検出部42で、それぞれ妨害の有無を検出する。そして、それぞれの検出部で検出された結果を統合し、最終的な妨害の有無の結果を出す検出結果統合部43が備えられている。
【0144】
この検出結果統合部43は、例えば、図18に示すようなテーブルを保持し、そのテーブルに基づき、2つの検出部からの結果を統合し、最終的な結果を出す。図18を参照するに、グローバルチェンジ検出部41からの検出結果が、異常なしとの結果であり、デフォーカス検出部42からの検出結果も異常なしとの結果である場合、異常なしとの判定がされる。
【0145】
グローバルチェンジ検出部41からの検出結果が、異常なしとの結果であり、デフォーカス検出部42からの検出結果が、異常ありとの結果である場合、フォーカスずらしの妨害が発生したと判定される。
【0146】
グローバルチェンジ検出部41からの検出結果が、異常ありとの結果であり、かつ、ヒストグラムの異常が、輝度が同一方向に変化する異常であるとの結果であり、デフォーカス検出部42からの検出結果が、異常なしとの結果である場合、首ふりの妨害が発生したと判定される。
【0147】
グローバルチェンジ検出部41からの検出結果が、異常ありとの結果であり、かつ、ヒストグラムの異常が、輝度が同一方向に変化する異常であるとの結果であり、デフォーカス検出部42からの検出結果が、異常ありとの結果である場合、覆いの妨害が発生したと判定される。
【0148】
グローバルチェンジ検出部41からの検出結果が、異常ありとの結果であり、かつ、ヒストグラムの異常が、輝度が複数方向に変化する異常であるとの結果であり、デフォーカス検出部42からの検出結果が、異常なしとの結果である場合、首ふりの妨害が発生したと判定される。
【0149】
グローバルチェンジ検出部41からの検出結果が、異常ありとの結果であり、かつ、ヒストグラムの異常が、輝度が複数方向に変化する異常であるとの結果であり、デフォーカス検出部42からの検出結果が、異常ありとの結果である場合、ズームずらしの妨害が発生したと判定される。
【0150】
このようなテーブルに基づき、検出結果の統合が行われ、最終的な検出結果が出力される際の、検出結果統合部43の処理について、図19のフローチャートを参照して説明する。なお、ここでは、処理の一例を示し、判定の順序などに限定を示すものではない。
【0151】
ステップS71において、グローバルチェンジ検出部41からの検出結果が、妨害を検出したことを示しているか否かが判定される。ステップS71において、グローバルチェンジは、検出されていないと判定された場合、ステップS72に処理が進められる。ステップS72において、デフォーカス検出部42からの検出結果が、妨害を検出したことを示しているか否かが判定される。ステップS72において、デフォーカスは検出されていないと判定された場合、ステップS73に処理が進められる。
【0152】
この場合、グローバルチェンジとデフォーカスの両方が検出されていないために、監視カメラに対する妨害は検出されていないと判定され、異常なしと判定される。
【0153】
一方、ステップS72において、デフォーカスが検出されたと判定された場合、処理は、ステップS74に進められる。この場合、グローバルチェンジは検出されていないが、デフォーカスは検出されているので、監視カメラに対する妨害が検出され、かつその妨害は、フォーカスずらしであると判定される。
【0154】
フォーカスがずらされる妨害の場合、監視カメラからの画像は、輝度が大きく変化しない可能性もあり、グローバルチェンジ検出部41で妨害が発生したと検出されないことがある。しかしながら、エッジ強度が低下する傾向にあるため、デフォーカス検出部42で妨害が発生したと検出される。よって、ステップS74においては、フォーカスずらしの妨害が発生したと判定される。
【0155】
この判定結果は、監視カメラを管理する管理者に通知される。通知される際、単に、妨害が発生したことを通知するだけでなく、その妨害が、フォーカスずらしであることも通知することができる。
【0156】
このように、妨害の種類までも通知できるようになることで、管理者は、妨害の種類に対する適切な処理を即座にとることが可能となる。例えば、フォーカスずらしであることが通知されたときには、フォーカスを元に戻すという対処を行えば良いことが、単に妨害が発生したことを通知された時よりもはるかに早く認識でき、対処することが可能となる。またフォーカスを管理者の指示によらず合わせる機能を有する監視カメラの場合、フォーカスずらしの妨害が発生したことを検知した時点で、フォーカスを合わすといった制御を開始することも可能となる。このようなことは、妨害の種類が判別できることで、行うことができるようになる制御である。
【0157】
図19のフローチャートの説明に戻り、ステップS71において、グローバルチェンジが検出された場合、ステップS75に処理が進められる。ステップS75において、輝度が同一方向に変化しているか否かが判定される。ステップS75において、輝度が同一方向に変化していると判定された場合、ステップS76に処理が進められる。ステップS76において、デフォーカスが検出されたか否かが判定される。
【0158】
ステップS76において、デフォーカスが検出されたと判定された場合、ステップS77に処理が進められる。この場合、輝度が同一方向に変化するグローバルチェンジが検出され、デフォーカスが検出された状況である。このような状況は、監視カメラに布などが被せられた覆いという妨害が発生したと判定される。
【0159】
布などにより監視カメラが覆われた場合、輝度値が一様に変化する傾向にある。よって、グローバルチェンジ検出部41により、輝度が同一方向に変化する異常が検出される。また、布などにより監視カメラが覆われた場合、監視カメラで撮像されている画像からエッジが無くなり(減少し)、エッジ強度が低下する可能性が高い。
【0160】
よって、グローバルチェンジ検出部41とデフォーカス検出部42のそれぞれで、異常ありとの検出結果が出力される。また、グローバルチェンジ検出部41により、輝度が同一方向に変化する異常が検出されていれば、覆いの妨害が発生したと判定することができる。この場合も、妨害が発生したことを通知するだけでなく、その妨害が、覆いあることも通知することができるので、管理者が対処をとるまでの時間を短縮することが可能となる。
【0161】
また、通知する際、対処法が通知されるようにしても良い。例えば、このような覆いという妨害が検出されたときには、”覆い妨害が発生したので、被せられている布などを至急取り除いてください”といったメッセージが妨害発生の通知として通知されるようにしてもよい。また、妨害が発生したことが検出された監視カメラの付近を映し出せる他の監視カメラに映像が切り換えられるなどの対処がされるようにしてもよい。
【0162】
一方、ステップS76において、デフォーカスは検出されていないと判定された場合、ステップS78に処理が進められる。この場合、輝度が同一方向に変化するグローバルチェンジが検出されたが、デフォーカスは検出されていない状況である。このような状況は、監視カメラの方向が他の方向にされた首ふりという妨害が発生したと判定される。
【0163】
首振りの場合、監視カメラの方向が変えられるため、撮像される画像が、首振りの前後で異なる。よって、輝度値が変化するので、グローバルチェンジ検出部41により妨害が発生しと検出される。しかしながら、首振り後に監視カメラで撮像される画像も、ピントが合っている状態であるとエッジ強度の変化が小さく、デフォーカス検出部42で妨害が検出されないことも有る。このような場合であっても、グローバルチェンジ検出部41とデフォーカス検出部42を備えることで、グローバルチェンジ検出部41で妨害を検出することができ、かつ、その妨害が首振りであると判定することができる。
【0164】
この場合も、妨害が発生したことを通知するだけでなく、その妨害が、首ふりであることも通知することができるので、管理者が対処をとるまでの時間を短縮することが可能となる。首振りの場合、監視カメラが設置されているところまで管理者が行って、正しい位置に直す、遠隔操作で、パンやチルトを制御できる機能を有する監視カメラであれば、遠隔操作で、正しい位置に直すといった対処がとられる。
【0165】
一方、ステップS75において、輝度が同一方向に変化していないと判定された場合、換言すれば、輝度が複数方向に変化していると判定された場合、ステップS79に処理が進められる。ステップS79において、デフォーカスが検出されたか否かが判定される。ステップS79において、デフォーカスが検出されたと判定された場合、ステップS80に処理が進められる。
【0166】
この場合、輝度が複数方向に変化するグローバルチェンジが検出され、デフォーカスが検出された状況である。このような状況は、監視カメラのズームがずらされたズームずらしという妨害が発生したと判定される。監視カメラのズームがずらされると、撮像される画像が変化するため、輝度値が変化する可能性が高い。しかしながら、布などで監視カメラが覆われた場合と異なり、一様に輝度値が変化する可能性は低い。よって、グローバルチェンジ検出部41においては、輝度値が複数方向に変化する異常が検出される。
【0167】
また、監視カメラのズームがずらされ、撮像される画像が変化することで、エッジ強度も変化する可能性が高い。よって、デフォーカス検出部42でも異常が検出される。このようなときには、ズームずらしの妨害が発生したと判定される。
【0168】
この場合も、妨害が発生したことを通知するだけでなく、その妨害が、ズームずらしであることも通知することができるので、管理者が対処をとるまでの時間を短縮することが可能となる。管理者は、監視カメラが設置されているところまで行って、正しいズーム位置に直す、遠隔操作で、ズームを制御できる機能を有する監視カメラであれば、遠隔操作で、正しいズーム位置に直すといった対処がとられる。
【0169】
一方、ステップS79において、デフォーカスは検出されていない判定された場合、ステップS78に処理が進められる。この場合、輝度が複数方向に変化するグローバルチェンジが検出されたが、デフォーカスは検出されていない状況である。このような状況は、監視カメラの方向が他の方向にされた首ふりという妨害が発生したと判定される。
【0170】
この場合も、妨害が発生したことを通知するだけでなく、その妨害が、首ふりであることも通知することができるので、管理者が対処をとるまでの時間を短縮することが可能となる。
【0171】
このように、グローバルチェンジ検出部41からの検出結果と、デフォーカス検出部42からの検出結果を統合することで、監視カメラに対する妨害が発生したことを検出することができるだけでなく、その妨害が、どのような妨害であるのか、妨害の種類までも検出することが可能となる。また、グローバルチェンジ検出部41とデフォーカス検出部42で、それぞれ妨害を検出するので、検出漏れや誤検出を低減させることが可能となる。
【0172】
妨害の種類を検出することが可能となることで、妨害の種類も管理者に通知することができるようになり、管理者が、妨害に対する対処を取りやすくなる。妨害の種類によっては、監視カメラ側で妨害を除去できる場合もある。このような場合、妨害の種類がわかることで、監視カメラ自体が、その妨害を除去できるか否かを判定し、除去できるときには、管理者の指示を待たずに、妨害の除去を開始することが可能となる。
【0173】
また、上述した実施の形態においては、グローバルチェンジ検出部41とデフォーカス検出部42は、それぞれ、1画像を複数の領域に分割し、領域毎に、妨害が発生した可能性があるか否かを判定し、領域毎の判定結果を用いて1画像における妨害が発生したか否かの判定を行うようにした。よって、例えば、一部の領域に極端にエッジ強度が強い領域があるような画像であっても、その領域に依存することなく、妨害の検知を行うことが可能となる。すなわち、より精度良く妨害の検知を行うことが可能となる。
【0174】
[記録媒体について]
上述した一連の処理は、ハードウェアにより実行することもできるし、ソフトウエアにより実行することもできる。一連の処理をソフトウエアにより実行する場合には、そのソフトウエアを構成するプログラムが、コンピュータにインストールされる。ここで、コンピュータには、専用のハードウェアに組み込まれているコンピュータや、各種のプログラムをインストールすることで、各種の機能を実行することが可能な、例えば汎用のパーソナルコンピュータなどが含まれる。
【0175】
図20は、上述した一連の処理をプログラムにより実行するコンピュータのハードウェアの構成例を示すブロック図である。
【0176】
コンピュータにおいて、CPU(Central Processing Unit)1001,ROM(Read Only Memory)1002,RAM(Random Access Memory)1003は、バス1004により相互に接続されている。バス1004には、さらに、入出力インタフェース1005が接続されている。入出力インタフェース1005には、入力部1006、出力部1007、記憶部1008、通信部1009、及びドライブ1010が接続されている。
【0177】
入力部1006は、キーボード、マウス、マイクロフォンなどよりなる。出力部1007は、ディスプレイ、スピーカなどよりなる。記憶部1008は、ハードディスクや不揮発性のメモリなどよりなる。通信部1009は、ネットワークインタフェースなどよりなる。ドライブ1010は、磁気ディスク、光ディスク、光磁気ディスク、又は半導体メモリなどのリムーバブルメディア1011を駆動する。
【0178】
以上のように構成されるコンピュータでは、CPU1001が、例えば、記憶部1008に記憶されているプログラムを、入出力インタフェース1005及びバス1004を介して、RAM1003にロードして実行することにより、上述した一連の処理が行われる。
【0179】
コンピュータ(CPU1001)が実行するプログラムは、例えば、パッケージメディア等としてのリムーバブルメディア1011に記録して提供することができる。また、プログラムは、ローカルエリアネットワーク、インターネット、デジタル衛星放送といった、有線または無線の伝送媒体を介して提供することができる。
【0180】
コンピュータでは、プログラムは、リムーバブルメディア1011をドライブ1010に装着することにより、入出力インタフェース1005を介して、記憶部1008にインストールすることができる。また、プログラムは、有線または無線の伝送媒体を介して、通信部1009で受信し、記憶部1008にインストールすることができる。その他、プログラムは、ROM1002や記憶部1008に、あらかじめインストールしておくことができる。
【0181】
なお、コンピュータが実行するプログラムは、本明細書で説明する順序に沿って時系列に処理が行われるプログラムであっても良いし、並列に、あるいは呼び出しが行われたとき等の必要なタイミングで処理が行われるプログラムであっても良い。
【0182】
また、本明細書において、システムとは、複数の装置により構成される装置全体を表すものである。
【0183】
なお、本技術の実施の形態は、上述した実施の形態に限定されるものではなく、本技術の要旨を逸脱しない範囲において種々の変更が可能である。
【0184】
なお、本技術は以下のような構成も取ることができる。
【0185】
(1)
画像の画像データを取得する取得部と、
取得された前記画像をN(N>1)個のブロックに分割する分割部と、
新たな前記画像の前記画像データが取得される毎に、N個の前記ブロックのうちのM(N≧M>1)個の前記ブロックを、更新対象の前記ブロックとして順次指定する指定部と、
指定されたM個の前記ブロックの前記画像データに所定のフィルタによるフィルタリングを施すフィルタリング部と、
前記フィルタリング部からのフィルタリング結果が、所定の値より大きい画素をカウントするカウント部と、
前記カウント部によりカウントされた前記画素の数と所定の値を比較することで、前記ブロックに異常があるか否かを判定する第1の判定部と、
前記第1の判定部により異常があると判定された前記画像内のブロック数と所定の値を比較することで、妨害が発生したか否かを判定する第2の判定部と
を備える画像処理装置。
(2)
前記カウント部は、前記フィルタリング結果が、前記所定の値より大きい画素の数をカウントした画素数と、前記フィルタリング結果が、前記所定の値以上であると判定された画素の値を加算した累積値を前記画素数で除算した平均値を算出し、
前記第1の判定部は、前記画素数が所定の値より小さいか否かの第1の判定と、前記平均値が所定の値より小さいか否かの第2の判定を行い、前記第1の判定と前記第2の判定の論理和を判定結果とする
前記(1)に記載の画像処理装置。
(3)
指定されたM個の前記ブロックの前記画像データのヒストグラムを生成するヒストグラム生成部と、
生成された前記ヒストグラムを順次更新して保存するヒストグラム保存部と、
生成されたM個の前記ブロックの前記ヒストグラムと、保存されていた対応する過去のM個の前記ブロックの前記ヒストグラムの類似度に基づいて、取得された前記画像の変化を判定する変化判定部と、
前記ヒストグラムの正規化を行うか否かを判定する正規化判定部と、
前記正規化判定部において正規化を行うと判定された場合に、生成されたM個の前記ブロックの前記ヒストグラムか、または、保存されていた対応する過去のM個の前記ブロックの前記ヒストグラムのいずれか一方を正規化する正規化部と
をさらに備え、
前記変化判定部は、前記正規化部により前記ヒストグラムの正規化が行われた場合、正規化後の前記ヒストグラムを用いた類似度に基づいて、取得された前記画像の変化を判定し、変化があったと判定した場合、妨害があったと判定する
前記(1)または前記(2)のいずれかに記載の画像処理装置。
(4)
前記第2の判定部による判定結果と、前記変化判定部による判定結果を統合し、前記妨害の種類を判定する
前記(3)に記載の画像処理装置。
(5)
画像の画像データを取得し、
取得された前記画像をN(N>1)個のブロックに分割し、
新たな前記画像の前記画像データが取得される毎に、N個の前記ブロックのうちのM(N≧M>1)個の前記ブロックを、更新対象の前記ブロックとして順次指定し、
指定されたM個の前記ブロックの前記画像データに所定のフィルタによるフィルタリングを施し、
フィルタリング結果が、所定の値より大きい画素をカウントし、
カウントされた前記画素の数と所定の値を比較することで、前記ブロックに異常があるか否かを判定し、
異常があると判定された前記画像内のブロック数と所定の値を比較することで、妨害が発生したか否かを判定する
ステップを含む画像処理方法。
(6)
コンピュータに、
画像の画像データを取得し、
取得された前記画像をN(N>1)個のブロックに分割し、
新たな前記画像の前記画像データが取得される毎に、N個の前記ブロックのうちのM(N≧M>1)個の前記ブロックを、更新対象の前記ブロックとして順次指定し、
指定されたM個の前記ブロックの前記画像データに所定のフィルタによるフィルタリングを施し、
フィルタリング結果が、所定の値より大きい画素をカウントし、
カウントされた前記画素の数と所定の値を比較することで、前記ブロックに異常があるか否かを判定し、
異常があると判定された前記画像内のブロック数と所定の値を比較することで、妨害が発生したか否かを判定する
ステップを含む処理を実行させるためのコンピュータ読み取り可能なプログラム。
【符号の説明】
【0186】
11 画像処理装置, 21 取得部, 22 画像処理部, 31 撮像信号処理部, 32 データ保存部, 33 画像解析部, 41 グローバルチェンジ検出部, 42 デフォーカス検出部, 43 検出結果統合部, 61 更新領域選択部, 62 ヒストグラム保存部, 63 画像分割部, 64 ヒストグラム生成部, 65 正規化処理部, 66 変化判定部, 67 変化領域保存部, 68 カウンタ部, 69 閾値判定部, 71 類似度演算部, 72 閾値判定部, 81 正規化判定部, 82 正規化値算出部, 83 平均値保存部, 84 正規化部, 101 更新領域選択部, 102 画像分割部, 103 異常領域検出部, 104 高周波フィルタ, 105異常判定部, 106 エッジ強度カウンタ, 107 閾値判定部, 108 異常領域保存部, 109 妨害判定部, 110 カウンタ部, 111 閾値判定部
【技術分野】
【0001】
本技術は、画像処理装置、画像処理方法、およびプログラムに関する。詳しくは、監視カメラなどに加えられた妨害行為を検出できるようにする画像処理装置、画像処理方法、およびプログラムに関する。
【背景技術】
【0002】
所定の空間への人、動物などの侵入者を発見するために、監視カメラにより対象とされる空間を撮影し、撮影画像から侵入者を検知する監視システムが知られている。かかる監視システムは、監視カメラに布を被せる、監視カメラの向きを変える、監視カメラのレンズにスプレーをかける、などの妨害行為が行われると、監視ができなくなる。
【0003】
監視カメラに対してされた妨害行為を検知する技術として、監視カメラにより撮像された現在の画像と予め記憶されている参照画像(または過去画像)との類似度を演算したり、エッジ強度を演算したりして、妨害行為があったか否かを判定することが提案されている(例えば、特許文献1,2参照)。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特許04626632号公報
【特許文献2】特許04227539号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
上記した特許文献1および特許文献2によれば、妨害行為があったことを検知することはできる。しかしながら、妨害の種類を判定することは困難である。妨害の種類を判定することができることで、妨害を取り除くための対処が異なるため、妨害の種類までも判定することができることが望まれている。
【0006】
また、特許文献1では、動体による誤検知を抑えるために動体検出処理も処理に含めることが開示されている。しかしながら、動体が画面全体を覆うようなシーンでなければ検出することができず、より細かな状況に応じた検出を行うことは困難である。
【0007】
また、特許文献2では、領域毎に処理を行うことが提案されている。しかしながら、妨害あったか否かの判定の際に、全領域の結果の値を加算して全体の値を算出していたため、一部の領域に極端にエッジ強度が強い領域があると、判定結果が、その領域に依存してしまうことがあり、誤判定をしてしまう可能性があった。
【0008】
監視カメラに対する妨害行為を、誤検出なく、より精度良く検出できるようにし、妨害の種類が判別でき、適切な対応を即座に取れるようにすることが所望されている。
【0009】
本技術は、このような状況に鑑みてなされたものであり、監視カメラなどに妨害が加えられたときに、その妨害を精度良く検出し、さらに妨害の種類も判別することができるようにするものである。
【課題を解決するための手段】
【0010】
本技術の一側面の画像処理装置においては、画像の画像データを取得する取得部と、取得された前記画像をN(N>1)個のブロックに分割する分割部と、新たな前記画像の前記画像データが取得される毎に、N個の前記ブロックのうちのM(N≧M>1)個の前記ブロックを、更新対象の前記ブロックとして順次指定する指定部と、指定されたM個の前記ブロックの前記画像データに所定のフィルタによるフィルタリングを施すフィルタリング部と、前記フィルタリング部からのフィルタリング結果が、所定の値より大きい画素をカウントするカウント部と、前記カウント部によりカウントされた前記画素の数と所定の値を比較することで、前記ブロックに異常があるか否かを判定する第1の判定部と、前記第1の判定部により異常があると判定された前記画像内のブロック数と所定の値を比較することで、妨害が発生したか否かを判定する第2の判定部とを備える。
【0011】
前記カウント部は、前記フィルタリング結果が、前記所定の値より大きい画素の数をカウントした画素数と、前記フィルタリング結果が、前記所定の値以上であると判定された画素の値を加算した累積値を前記画素数で除算した平均値を算出し、前記第1の判定部は、前記画素数が所定の値より小さいか否かの第1の判定と、前記平均値が所定の値より小さいか否かの第2の判定を行い、前記第1の判定と前記第2の判定の論理和を判定結果とするようにすることができる。
【0012】
指定されたM個の前記ブロックの前記画像データのヒストグラムを生成するヒストグラム生成部と、生成された前記ヒストグラムを順次更新して保存するヒストグラム保存部と、生成されたM個の前記ブロックの前記ヒストグラムと、保存されていた対応する過去のM個の前記ブロックの前記ヒストグラムの類似度に基づいて、取得された前記画像の変化を判定する変化判定部と、前記ヒストグラムの正規化を行うか否かを判定する正規化判定部と、前記正規化判定部において正規化を行うと判定された場合に、生成されたM個の前記ブロックの前記ヒストグラムか、または保存されていた対応する過去のM個の前記ブロックの前記ヒストグラムのいずれか一方を正規化する正規化部とをさらに備え、前記変化判定部は、前記正規化部により前記ヒストグラムの正規化が行われた場合、正規化後の前記ヒストグラムを用いた類似度に基づいて、取得された前記画像の変化を判定し、変化があったと判定した場合、妨害があったと判定するようにすることができる。
【0013】
前記第2の判定部による判定結果と、前記変化判定部による判定結果を統合し、前記妨害の種類を判定するようにすることができる。
【0014】
本技術の一側面の画像処理方法は、画像の画像データを取得し、取得された前記画像をN(N>1)個のブロックに分割し、新たな前記画像の前記画像データが取得される毎に、N個の前記ブロックのうちのM(N≧M>1)個の前記ブロックを、更新対象の前記ブロックとして順次指定し、指定されたM個の前記ブロックの前記画像データに所定のフィルタによるフィルタリングを施し、フィルタリング結果が、所定の値より大きい画素をカウントし、カウントされた前記画素の数と所定の値を比較することで、前記ブロックに異常があるか否かを判定し、異常があると判定された前記画像内のブロック数と所定の値を比較することで、妨害が発生したか否かを判定するステップを含む。
【0015】
本技術の一側面のプログラムは、コンピュータに、画像の画像データを取得し、取得された前記画像をN(N>1)個のブロックに分割し、新たな前記画像の前記画像データが取得される毎に、N個の前記ブロックのうちのM(N≧M>1)個の前記ブロックを、更新対象の前記ブロックとして順次指定し、指定されたM個の前記ブロックの前記画像データに所定のフィルタによるフィルタリングを施し、フィルタリング結果が、所定の値より大きい画素をカウントし、カウントされた前記画素の数と所定の値を比較することで、前記ブロックに異常があるか否かを判定し、異常があると判定された前記画像内のブロック数と所定の値を比較することで、妨害が発生したか否かを判定するステップを含む処理を実行させるためのコンピュータ読み取り可能なプログラムである。
【0016】
本技術の一側面の画像処理装置、画像処理方法、並びにプログラムにおいては、取得された画像がN(N>1)個のブロックに分割され、新たな画像の画像データが取得される毎に、N個のブロックのうちのM(N≧M>1)個のブロックが、更新対象のブロックとして順次指定され、指定されたM個のブロックの画像データに所定のフィルタによるフィルタリングが施され、そのフィルタリング結果が、所定の値より大きい画素がカウントされ、そのカウントされた画素の数と所定の値が比較されることで、ブロックに異常があるか否かが判定される。そして、異常があると判定された画像内のブロック数と所定の値がさらに比較されることで、妨害が発生したか否かが判定される。
【発明の効果】
【0017】
本技術の一側面によれば、監視カメラなどに妨害が加えられたときに、その妨害を精度良く検出することができる。また妨害の種類も判別することができる。妨害の種類を判別することができるようになることで、妨害の除去に対する適切な対処を、ユーザが行いやすくなる。
【図面の簡単な説明】
【0018】
【図1】本発明の画像処理装置の一実施の形態の構成を示すブロック図である。
【図2】画像解析部の構成を示すブロック図である。
【図3】グローバルチェンジ検出部の詳細構成例を示すブロック図である。
【図4】正規化処理部の詳細構成例を示すブロック図である。
【図5】デフォーカス検出部の構成を示す図である。
【図6】正規化判定部の処理を説明する図である。
【図7】正規化値算出部の処理を説明する図である。
【図8】正規化部の処理を説明する図である。
【図9】正規化部の処理を説明する図である。
【図10】変化判定部の詳細構成例を示すブロック図である。
【図11】変化判定部の処理を説明する図である。
【図12】グローバルチェンジ検出部の処理を説明するフローチャートである。
【図13】更新するブロックの移動を説明する図である。
【図14】正規化処理の詳細を説明するフローチャートである。
【図15】ブロックの形状を示す図である。
【図16】ブロックの形状を示す図である。
【図17】デフォーカス検出部の処理を説明するフローチャートである。
【図18】検出結果の統合について説明するための図である。
【図19】検出結果の統合について説明するためのフローチャートである。
【図20】記録媒体について説明するための図である。
【発明を実施するための形態】
【0019】
以下に、本技術の実施の形態について図面を参照して説明する。
【0020】
[画像処理装置の構成]
図1は、本技術の画像処理装置の一実施の形態の構成を示すブロック図である。本技術は、監視カメラにより撮像される画像を解析し、監視カメラに対して加えられた妨害を検出する装置に適用できる。図1に示した画像処理装置11は、取得された画像に基づいて、監視カメラ(監視装置)に対する妨害行為を検出し、妨害行為が検出されたときアラームを出力する。
【0021】
ここで、監視カメラに関する妨害について説明する。監視カメラに関する妨害として、監視対象を視野外(撮影範囲外)にする妨害がある。この妨害は、監視カメラの向きを変える首振りと称される妨害や、監視カメラに布などを被せる覆いと称される妨害がある。このような監視対象を視野外にする妨害をここでは、グローバルチェンジと記述する。
【0022】
また、監視カメラのフォーカスをずらす妨害もある。この妨害としては、監視カメラのフォーカスをずらすフォーカスずらしや、監視カメラのズームをずらすズームずらしがある。このようなフォーカスをずらす妨害をここでは、デフォーカスと記述する。
【0023】
図1に示した画像処理装置11は、取得部21と画像処理部22により構成されている。画像の画像データを取得する取得手段としての取得部21は、CMOS(Complementary Metal Oxide Semiconductor)センサ、ビデオカメラなどの撮像部を内蔵し、撮像部が監視する対象空間などの被写体を撮影することで得られた画像データを取得し、出力する。取得部21はまた、ネットワークを介して外部から供給される画像データを取得することもできる。
【0024】
画像処理部22は、撮像信号処理部31、データ保存部32、および画像解析部33により構成される。撮像信号処理部31は、取得部21より得られた画像データに対して、黒レベル補正処理、ホワイトバランス処理、γ補正処理、色補正処理等の各種画像処理を施す。
【0025】
撮像信号処理部31は、例えばDSP(Digital Signal Processor)により構成される。データ保存部32は、撮像信号処理部31により処理された画像データを保存する。データ保存部32は、例えばRAM(Random Access Memory)により構成される。画像解析部33は、撮像信号処理部31より供給される現在の画像と、データ保存部32より供給される過去の画像である参照画像を解析することにより、妨害行為を検出する。画像解析部33は、例えばCPU(Central Processing Unit)により構成される。
【0026】
[画像解析部33の詳細構成]
図2は、画像解析部33の内部構成を示す図である。画像解析部33は、グローバルチェンジ検出部41、デフォーカス検出部42、および検出結果統合部43を含む。グローバルチェンジ検出部41は、上記したグローバルチェンジに係わる妨害を検出するための処理を行う。デフォーカス検出部42は、上記したデフォーカスに係わる妨害を検出するための処理を行う。検出結果統合部43は、グローバルチェンジ検出部41とデフォーカス検出部42からそれぞれ出力される検出結果を統合し、監視カメラに対する妨害行為の種類などを判別する。
【0027】
[グローバルチェンジ検出部41の詳細構成]
図3は、グローバルチェンジ検出部41の詳細構成例を示すブロック図である。グローバルチェンジ検出部41は、更新領域選択部61、ヒストグラム保存部62、画像分割部63、ヒストグラム生成部64、正規化処理部65、変化判定部66、変化領域保存部67、カウンタ部68、および閾値判定部69により構成されている。
【0028】
更新領域選択部61は、新たな画像の画像データが取得される毎に、N個のブロックのうちのM(N≧M>1)個のブロックを、更新するブロックとして順次指定する指定手段として機能する。この更新領域選択部61は、撮像信号処理部31から供給されるデータから、取得部21により取得された画像のフレーム番号を抽出し、更新するフレーム番号を決定する。さらに更新領域選択部61は、更新するフレームの中の更新するブロックを決定する。
【0029】
取得された画像をN(N>1)個のブロックに分割する分割手段としての画像分割部63は、撮像信号処理部31から供給される画像データに基づく各フレームの画像のうち、更新領域選択部61により指定されるフレームを複数のブロックに分割する。画像分割部63はまた、分割されたブロックのうち、更新領域選択部61により指定されるブロックの画像データを、ヒストグラム生成部64に供給する。
【0030】
取得された画像データのヒストグラムを生成するヒストグラム生成手段としてのヒストグラム生成部64は、画像分割部63から供給されたブロックのヒストグラムを生成する。なお、撮像信号処理部31がヒストグラム生成機能を備える場合がある。その場合には、ヒストグラム生成部64は撮像信号処理部31内に設けることができる。
【0031】
生成されたヒストグラムを順次更新して保存するヒストグラム保存手段としてのヒストグラム保存部62は、更新領域選択部61により更新領域として指定されるブロックのヒストグラムを更新する。すなわち、ヒストグラム生成部64から供給される現在のフレームの更新対象のブロックのヒストグラムにより、既に記憶されている過去のフレームの対応するブロックのヒストグラムが書き換えられる。
【0032】
正規化処理部65は、ブロックのヒストグラムを必要に応じて正規化する。正規化処理部65には、ヒストグラム生成部64から、現在のフレームの更新対象のブロックのヒストグラムが供給される。また、正規化処理部65には、ヒストグラム生成部64から供給されたブロックに対応する過去のヒストグラムが、ヒストグラム保存部62から供給される。正規化処理部65は、ヒストグラム生成部64から供給される現在のフレームの更新対象の各ブロックについてヒストグラムの正規化の要否を判定し、必要に応じて正規化する。なお、現在のフレームの更新対象のブロックのヒストグラムと、それに対応する過去のブロックのヒストグラムのどちらが正規化されるかは、ヒストグラムの状況に応じて判定される。
【0033】
取得された画像の変化を判定する変化判定手段としての変化判定部66は、生成された現在のヒストグラムと、保存されていた過去のヒストグラムの類似度に基づいて、変化判定処理を行う。変化判定部66は、類似度演算部71と閾値判定部72により構成されている。
【0034】
類似度演算部71は、現在と過去のヒストグラムの類似度を演算する類似度演算手段として機能する。即ち、類似度演算部71は、ヒストグラム生成部64から供給される現在のフレームの更新対象のブロックのヒストグラムと、それに対応する過去のブロックのヒストグラムとの類似度を演算する。
【0035】
類似度閾値判定手段としての閾値判定部72は、演算された類似度を類似度閾値と比較し、類似度が類似度閾値より大きいとき、ブロックの画像に変化があったと判定する。閾値判定部72は、ブロックの画像の変化についての判定結果(変化の有無)を、変化領域保存部67およびカウンタ部68に出力する。
【0036】
変化領域保存部67は、変化判定部66による判定結果を保存する。即ち、現在のフレームの更新対象のブロックの、過去のブロックに対する変化の有無が、新たな画像の画像データが取得される毎に、順次、変化領域保存部67に保存される。
【0037】
変化があったと判定されたブロックの数をカウントするカウント手段としてのカウンタ部68には、変化判定部66から、現在のフレームの更新対象のブロックの判定結果(変化の有無)が供給される。また、変化領域保存部67からは、現在のフレームの更新対象のブロック以外のブロックの判定結果が、カウンタ部68に供給される。カウンタ部68は、変化判定部66の出力と変化領域保存部67の出力に基づいて、1つの監視中の画像中の変化があったブロックの数をカウントする。
【0038】
カウントされた値をアラーム閾値と比較し、カウントされた値がアラーム閾値より大きいときアラームを出力するアラーム閾値判定手段としての閾値判定部69は、カウンタ部68によりカウントされたブロックの数を、予め決められている所定の閾値と比較する。カウントされたブロックの数が閾値より大きいとき、妨害行為が検出されたと判定し、検出信号が出力される。この検出信号は例えばアラームとすることができる。
【0039】
[正規化処理部65の詳細構成]
図4は、正規化処理部65の詳細構成例を示すブロック図である。正規化処理部65は、正規化判定部81、正規化値算出部82、平均値保存部83、および正規化部84により構成されている。
【0040】
正規化判定部81には、ヒストグラム生成部64から、現在のフレームの更新対象のブロックのヒストグラムが供給され、ヒストグラム生成部64から供給されたブロックに対応する過去のヒストグラムが、ヒストグラム保存部62から供給される。以下では、適宜、現在のフレームの更新対象のブロックのヒストグラムを現在のヒストグラム、過去のフレームの対応するブロックのヒストグラムを過去のヒストグラムと称する。
【0041】
正規化判定部81は、現在のフレームの更新対象のブロックに対して正規化を行うか否かを判定する。正規化判定部81は、正規化を行わない(行う必要がない)と判定した場合、入力された更新対象の各ブロックの現在のヒストグラムと過去のヒストグラムを、そのまま変化判定部66に供給する。正規化判定部81は、正規化を行う(必要がある)と判定した場合、入力された更新対象の各ブロックの現在のヒストグラムと過去のヒストグラムを、正規化値算出部82に供給する。
【0042】
正規化値算出部82は、入力された更新対象の各ブロックの現在のヒストグラムと過去のヒストグラムから、正規化に用いる正規化値を算出する。算出された正規化値は、更新対象の各ブロックの現在のヒストグラムと過去のヒストグラムとともに、正規化部84に供給される。
【0043】
平均値保存部83には、現在のフレームより前に計算された、更新対象のブロック以外のブロックの、ヒストグラムの平均値の変化の方向と変化率などが保存される。また、現在のフレームに対し正規化判定部81および正規化値算出部82で計算された同様の値も、次フレーム以降の処理のため、平均値保存部83に供給され、保存(更新)される。平均値保存部83に保存される値(ヒストグラムの平均値の変化の方向と変化率)の詳細については後述する。
【0044】
正規化部84は、正規化値算出部82で算出された正規化値に基づいて、更新対象の各ブロックの現在のヒストグラムか、または、過去のヒストグラムのいずれか一方を正規化する。これにより、現在のヒストグラムと過去のヒストグラムとで、ブロックの明るさを補正したヒストグラムを生成することができる。正規化部84は、正規化後の現在のヒストグラムと過去のヒストグラムを変化判定部66に出力する。
【0045】
なお、図4に示したような構成とすることで、性能を向上させることができる。すなわち、正規化判定部81を設け、上記および後述するように正規化を行うか否かを判定することで、全体の性能を向上させることができる。しかしながら、正規化判定部81を設けずに、全ての領域に関して正規化値算出部82による正規化値の算出が行われ、正規化部84で正規化が行われる構成とすることも可能である。また正規化判定部81を設けない構成とした場合、平均値保存部83も削除した構成とされる。すなわち、正規化処理部65は、正規化値算出部82と正規化部84から構成されるように構成することも可能である。
【0046】
[デフォーカス検出部42の詳細構成]
図5は、デフォーカス検出部42の詳細構成例を示すブロック図である。デフォーカス検出部42は、更新領域選択部101、画像分割部102、異常領域検出部103、高周波フィルタ104、異常判定部105、エッジ強度カウンタ106、閾値判定部107、異常領域保存部108、妨害判定部109、カウンタ部110、および閾値判定部111により構成されている。
【0047】
更新領域選択部101は、新たな画像の画像データが取得される毎に、N個のブロックのうちのM(N≧M>1)個のブロックを、更新するブロックとして順次指定する指定手段として機能する。この更新領域選択部101は、撮像信号処理部31から供給されるデータから、取得部21により取得された画像のフレーム番号を抽出し、更新するフレーム番号を決定する。さらに更新領域選択部101は、更新するフレームの中の更新するブロックを決定する。
【0048】
取得された画像をN(N>1)個のブロックに分割する分割手段としての画像分割部102は、撮像信号処理部31から供給される画像データに基づく各フレームの画像のうち、更新領域選択部101により指定されるフレームを複数のブロックに分割する。画像分割部102はまた、分割されたブロックのうち、更新領域選択部101により指定されるブロックの画像データを、異常領域検出部103の高周波フィルタ104に供給する。
【0049】
取得された画像データに対して、高周波フィルタによるフィルタリングを行うフィルタリング手段としての高周波フィルタ104は、画像分割部102から供給されたブロックに、所定の高周波フィルタによるフィルタリング処理を施す。
【0050】
取得された画像の異常を判定する異常判定手段としての異常判定部105は、エッジ強度カウンタ106と閾値判定部107により構成されている。エッジ強度カウンタ106は、エッジ強度が所定の閾値より大きい画素の数をカウントし、エッジ強度の平均値などを算出する算出手段として機能する。
【0051】
閾値判定手段としての閾値判定部107は、画素数や平均値を所定の閾値と比較し、閾値より大きいブロックの画像は異常があったと判定する。閾値判定部107は、ブロックの画像の異常についての判定結果(異常の有無)を、異常領域保存部108およびカウンタ部110に出力する。
【0052】
異常領域保存部108は、異常判定部105による判定結果を保存する。即ち、現在のフレームの更新対象のブロックの、過去のブロックに対する異常の有無が、新たな画像の画像データが取得される毎に、順次、異常領域保存部108に保存される。
【0053】
妨害判定部109は、カウンタ部110と閾値判定部111から構成されている。妨害判定部109は、監視カメラに対して妨害があったか否かを判定する。異常があったと判定されたブロックの数をカウントするカウント手段としてのカウンタ部110には、異常判定部105から、現在のフレームの更新対象のブロックの判定結果(異常の有無)が供給される。また、異常領域保存部108からは、現在のフレームの更新対象のブロック以外のブロックの判定結果が、カウンタ部110に供給される。カウンタ部110は、異常判定部105の出力と異常領域保存部108の出力に基づいて、1つの監視中の画像中の異常があったブロックの数をカウントする。
【0054】
カウントされた値をアラーム閾値と比較し、カウントされた値がアラーム閾値より大きいときアラームを出力するアラーム閾値判定手段としての閾値判定部111は、カウンタ部110によりカウントされたブロックの数を、予め決められている所定の閾値と比較する。カウントされたブロックの数が閾値より大きいとき、妨害行為が検出されたと判定し、検出信号が出力される。この検出信号は例えばアラームとすることができる。
【0055】
このように、本実施の形態においては、グローバルチェンジ検出部41とデフォーカス検出部42が設けられているため、それぞれの検出部で、グローバルチェンジに関する妨害と、デフォーカスに関する妨害を検出することができる。よって、種々の妨害を検出することができる。以下に、グローバルチェンジ検出部41とデフォーカス検出部42のそれぞれが行う処理についてさらに説明を加える。まず、グローバルチェンジ検出部41について説明する。
【0056】
[グローバルチェンジ検出部41の検出について]
グローバルチェンジ検出部41が行う妨害行為検出の原理(概要)について説明する。グローバルチェンジ検出部41は、過去の画像PIと、現在の画像NIをそれぞれ取得し、過去の画像PIと現在の画像NIのそれぞれを、所定の大きさのブロックに分割し、ブロック毎に画素値のヒストグラムを演算する。そして過去の画像PIの所定の位置のブロックのヒストグラムと、現在の画像NIの対応する位置のブロックのヒストグラムの類似度が演算される。類似度が低いブロックは、変化領域VIとして検出され、変化領域VIの数が多い場合、妨害行為があったと判定され、アラームが出力される。次に、グローバルチェンジ検出部41を構成するここのブロックが行う処理について説明する。
【0057】
[正規化判定部81の処理]
図6を参照して、正規化判定部81の処理について説明する。正規化判定部81には、現在のフレームの更新対象の各ブロックについて、現在のヒストグラムと、過去のヒストグラムが供給される。図6の例では、画像が16個のブロックに分割され、斜線で示される4個のブロックが、現在のフレームでの更新対象のブロックを示している。
【0058】
正規化判定部81は、現在のフレームの更新対象の各ブロックについて、現在のヒストグラムと過去のヒストグラムそれぞれの平均値を算出し、過去から現在への平均値の変化の方向が、増加、減少、または変動なし、のいずれであるかを判定する。例えば、過去と現在のヒストグラムの平均値の差(絶対値)が、所定の範囲TH以内であれば変動なし、所定の範囲THより大であれば、その変化の方向に応じて増加または減少とすることができる。
【0059】
正規化判定部81はまた、現在のフレームの更新対象ではないブロックについて、同様に判定したときの判定結果(変化の方向)を、平均値保存部83から取得する。そして、正規化判定部81は、画面全体の変化として、増加、減少、変動なし、のいずれであるかを判定する。例えば、画面全体のブロック数に対する増加(減少)のブロック数が、予め設定した所定の比率以上であれば、画面全体として増加(減少)の変化であると判定することができる。
【0060】
図6右側の図は、プラス(+)が付されたブロックは変化の方向が増加であるブロックを示し、マイナス(−)が付されたブロックは変化の方向が減少であるブロックを示している。無印のブロックは変動なしのブロックである。図6右側のフレームは、画面全体としては、増加の変化が見られたフレームと判定される。
【0061】
画面全体として、ヒストグラムの平均値の変化の方向が、増加または減少のどちらかに一定以上偏っている場合、画面全体が明るくなった、または暗くなったことを意味する。この場合、AE機能や照明による画像全体の輝度の変化、もしくは、監視カメラが隠されるなどの妨害行為により、画面全体の輝度が変化したと考えられ、正規化を行った方がよい。一方、画面全体としてのヒストグラムの平均値の変化がない場合や、平均値の増加および減少に偏りが見られない場合には、正規化を行わない方がよい。
【0062】
このような場合には、画像に変化がない、画面の一部に動体が入るなどして変化した、または、監視カメラの向きを変えられるなどの妨害行為が行われたなどが考えられ、正規化することにより偶然ヒストグラムの形が一致する領域が多くなることがある。その結果、かえって妨害行為を検出できなくなる事態が考えられるので、これを防止するためである。
【0063】
以上より、正規化判定部81は、画面全体として、ヒストグラムの平均値の変化の方向が、増加または減少のどちらかに一定以上偏っている場合、正規化を行う必要があると判定する。一方、画面全体としてヒストグラムの平均値に変動がない場合や、平均値の増加および減少に偏りが見られない場合には、正規化を行う必要がないと判定する。
【0064】
[正規化値算出部82の処理]
図7を参照して、正規化値算出部82の処理について説明する。正規化値算出部82は、画面全体のヒストグラムの平均値の変化の方向が、増加または減少のどちらかに一定以上偏っている場合に、画面全体で、どの程度変化したのかを表す変化の比率(以下、変化率と記載する)を求め、それを正規化値とする。
【0065】
最初に、正規化値算出部82は、各ブロックで、現在のヒストグラムと過去のヒストグラムそれぞれの平均値を算出する。現在のフレームの更新対象の各ブロックについては、供給されるヒストグラムから平均値を算出する。現在のフレームの更新対象のブロック以外のブロックの現在と過去のヒストグラムの平均値は、既に計算されて保存されている平均値保存部83から取得される。
【0066】
次に、正規化値算出部82は、画面全体のなかから有効領域を決定する。ここで、正規化判定部81において画面全体の変化の方向が増加であると判定された場合には、ブロックの変化の方向が増加であるブロックの各領域が有効領域とされる。そして、正規化値算出部82は、有効領域とされた各ブロックについて、現在のヒストグラムの平均値を、過去のヒストグラムの平均値で除算し、その結果を変化率とする。これにより、有効領域とされた各ブロックについて変化率が求まる。
【0067】
なお、画面全体の変化の方向が増加であると判定された場合、ブロックの変化の方向が増加であるブロックの各領域が有効領域とされるが、増加率が所定値以上に大きい、換言すれば極端に明るくなったブロックも有効領域から除外される。変動なしのブロック、平均値の変化の方向が減少のブロック、極端に明るくなったブロックが有効領域から除外されるのは、そのブロックに、AE機能によって明るさが変化した原因の動体が存在する可能性が高いためである。
【0068】
図7において、斜線が付されたブロックが有効領域とされたブロックを示している。
【0069】
これに対して、正規化判定部81において画面全体の変化の方向が減少であると判定された場合には、ブロックの変化の方向が減少であるブロックの各領域が有効領域とされる。そして、正規化値算出部82は、有効領域とされた各ブロックについて、過去のヒストグラムの平均値を、現在のヒストグラムの平均値で除算し、その結果を変化率とする。これにより、画面全体の変化の方向が減少であると判定された場合も、有効領域とされた各ブロックについて変化率が求まる。
【0070】
最後に、正規化値算出部82は、有効領域とされた各ブロックについて求めた変化率の平均値を算出し、その結果を正規化値に決定する。
【0071】
以上のように、有効領域を決定し、その変化率の平均値を求めることで、動体領域の影響を除外した画面全体の変化率を求め、正規化値とするので、後段の正規化部84において、正規化を精度良く行うことができる。
【0072】
[正規化部84の処理]
図8と図9を参照して、正規化部84の処理について説明する。正規化部84は、現在のフレームの更新対象のブロックの、現在と過去のヒストグラム間で、正規化値算出部82で算出された正規化値を用いたストレッチングを行う。正規化判定部81において画面全体の変化の方向が増加である、即ち、画面全体で明るくなったと判定された場合には、過去のヒストグラムを引き延ばし、逆に画面全体で暗くなったと判定された場合には、現在のヒストグラムを引き延ばすストレッチングが行われる。即ち、過去と現在のヒストグラムのうち、暗い側のヒストグラムがストレッチングされる。
【0073】
図8は、現在のフレームの更新対象のあるブロックの現在と過去のヒストグラムを示している。ヒストグラムの横軸は輝度、縦軸は度数(所定の範囲の輝度値を有する画素の個数)を示している。
【0074】
図8Aに示される現在のヒストグラムの平均値は5で、面積は8である。一方、図8Bに示される過去のヒストグラムの平均値は10で、面積は8である。このような現在と過去のヒストグラムの関係は、例えば、同じ被写体で照明(太陽光)が暗くなった場合などのときに起こり得る。このような現在と過去のヒストグラムに対し、正規化を行わず変化の有無を判定すれば、ヒストグラムの重なりの程度で類似度を判定する変化判定部66において、変化ありと判定される。しかし、単に照明によるヒストグラムの変化であるならば、変化ありの判定は誤判定である。
【0075】
そこで、正規化部84は、図9に示すような、正規化値算出部82で算出された正規化値を用いて現在のヒストグラムを引き延ばすストレッチングを行う。具体的には、正規化部84は、現在のヒストグラムを正規化値で横軸方向(輝度方向)に引き延ばす。
【0076】
図9の例は、正規化値が「2」である場合の例である。ストレッチング前の輝度値は「4」、「5」、及び「6」しかないので、2倍すると、「8」、「10」、及び「12」のみとなるが、それ以外輝度値の度数についても、周辺の度数から補間して求められる。
【0077】
ヒストグラムを引き延ばすと、ヒストグラムの面積が増えてしまうため、次に、正規化部84は、正規化の前後で面積が同一となるようにヒストグラムの度数を調整する。図9の例では、現在のヒストグラムのストレッチング後の面積が「16」であり、ストレッチング前の面積が「8」であるので、ストレッチング後の現在のヒストグラムの各輝度値の度数が、「8/16=1/2倍」される。これにより、正規化後の現在のヒストグラムの面積は正規化前と同一の「8」となる。
【0078】
以上のように、画面全体の変化の方向に応じて、現在または過去のヒストグラムが正規化される。そして、正規化後のヒストグラムが変化判定部66に出力される。
【0079】
[変化判定部66の処理]
図10と図11を参照して、変化判定部66が行う、ブロックの画像の変化の有無の判定について説明する。図10は、類似度演算部71に供給される現在のヒストグラムと過去のヒストグラムの例を示している。即ち、図10Aのヒストグラムh1は、現在のヒストグラムの例であり、図10Bのヒストグラムh0は、過去のヒストグラムの例である。なお、横軸は輝度値に代表される画素値を表し、縦軸は所定の範囲の画素値を有する画素の個数(度数)を表している。
【0080】
図10に示すような現在のヒストグラムh1と過去のヒストグラムh0に対して、類似度演算部71において、インタセクションを用いた次式(1)により、類似度が演算される。
D=Σmin(Ai,Bi) ・・・・・・・・(1)
【0081】
式(1)のAi,Biは、それぞれ現在のヒストグラムh1の1つの画素値と、過去のヒストグラムh0の1つの画素値を表している。従って、式(1)によれば、各画素値において、画素の数値(画素値)が小さい方の和が求められる。この比較処理は、直近の過去のN(N>1)フレームについて行われる。
【0082】
図11Aに示されるように、現在のヒストグラムh1と過去のヒストグラムh0の殆どが重なっている場合、式(1)で演算される値Dは、大きくなる。それに対して、図11Bに示されるように、現在のヒストグラムh1と過去のヒストグラムh0の重なりが少ない場合、値Dは小さくなる。即ち、式(1)の値Dは、類似度が高いとき大きくなり、類似度が低いとき小さくなる。
【0083】
次に、図12のフローチャートを参照して、画像処理装置11のグローバルチェンジ検出部41による妨害行為検出処理について説明する。初めに、ステップS1において、取得部21はカメラ画像を取得する。すなわち撮像部が所定の監視対象を撮像しており、その撮像画像の画像データが取得される。
【0084】
ステップS2において、画像分割部63は、N個のブロックに画像を分割する。この実施の形態においては、画像データに基づく各フレームの画像が8×8個のブロックに分割される。ステップS3において、更新領域選択部61は、更新領域(更新対象のブロック)を選択する。すなわち、8×8個のブロックのうちの所定のM(M≦N)個のブロックが、更新対象のブロックとして選択される。この更新領域の選択について、図13を参照して説明する。
【0085】
図13は、更新するブロックの移動を説明する図である。この実施の形態においては、M=4とされ、8×8個のブロックが4×4個のブロックからなる4個のグループに区分される。そして、各グループから1個のブロックが選択されて、合計4個のブロックが更新対象のブロックとして選択される。具体的には、図13Aに示されるように、更新領域選択部61は、最初のフレームの8×8個のブロックのうちの、1行目の最も左側に位置するブロックb11、最も右側に位置するブロックb18、8行目の最も左側に位置するブロックb81、最も右側に位置するブロックb88の4つのブロックを更新ブロックとして選択する。
【0086】
なお、図13において、上からi番目の行に位置し、左からj番目の列に位置するブロックを、bijのように表す。後述する図15、図16においても同様とする。
【0087】
次の更新領域を選択するステップでは、図13Bに示されるように、更新領域選択部61は、次のフレームの8×8個のブロックのうちの、ブロックb11の1つ右側に位置するブロックb12、ブロックb18の1つ左側に位置するブロックb17、8行目のブロックb81の1つ右側に位置するブロックb82、ブロックb88の1つ左側に位置するブロックb87の4つのブロックを更新ブロックとして選択する。
【0088】
次の更新領域を選択するステップでは、図13Cに示されるように、更新領域選択部61は、次のフレームの8×8個のブロックのうちの、1行目のブロックb12の1つ右側に位置するブロックb13、ブロックb17の1つ左側に位置するブロックb16、8行目のブロックb82の1つ右側に位置するブロックb83、ブロックb87の1つ左側に位置するブロックb86の4つのブロックを更新ブロックとして選択する。
【0089】
次の更新領域を選択するステップでは、図13Dに示されるように、更新領域選択部61は、次のフレームの8×8個のブロックのうちの、1行目のブロックb13の1つ右側に位置するブロックb14、ブロックb16の1つ左側に位置するブロックb15、8行目のブロックb83の1つ右側に位置するブロックb84、ブロックb86の1つ左側に位置するブロックb85の4つのブロックを更新ブロックとして選択する。
【0090】
以上のようにして最上行と最下行におけるブロックの選択、移動が終了すると、次の更新領域を選択するステップでは、第2行目と第7行目とが選択される。そして図13Eに示されるように、更新領域選択部61は、次のフレームの8×8個のブロックのうちの、2行目の最も左側に位置するブロックb11、最も右側に位置するブロックb28、7行目の最も左側に位置するブロックb71、最も右側に位置するブロックb78の4つのブロックを更新ブロックとして選択する。
【0091】
次の更新領域を選択するステップでは、図13Fに示されるように、更新領域選択部61は、次のフレームの8×8個のブロックのうちの、2行目のブロックb11の1つ右側に位置するブロックb22、ブロックb28の1つ左側に位置するブロックb27、7行目のブロックb71の1つ右側に位置するブロックb72、ブロックb78の1つ左側に位置するブロックb77の4つのブロックを更新ブロックとして選択する。
【0092】
以下、同様の手順により、更新対象のブロックとして、1フレームにおいて4個のブロックが順次選択される。すなわち、左側半分の上側半分の領域においては、行内においては左から右方向に、そして行は上から下方向に順次選択される。右側半分の上側半分の領域においては、行内においては右から左方向に、そして行は上から下方向に順次選択される。左側半分の下側半分の領域においては、行内においては左から右方向に、そして行は下から上方向に順次選択される。右側半分の下側半分の領域においては、行内においては左から右方向に、そして行は下から上方向に順次選択される。
【0093】
なお、図13に示した領域の移動順序は、一例であり、限定を示すものではない。4×4個のブロックからなる4個のグループに区分され、そのグループ内で、更新ブロックが上記したように、順次、選択されるとして説明したが、上記した説明のような選択に限定されるわけではない。例えば、図13Aに示したように、更新ブロックの開始位置は、左上のブロックb11、右上のブロックb18、左下のブロックb81、および右下のブロックb88が、それぞれ選択されるとして説明したが、各グループ内の、例えば右上にあるブロックが更新ブロックの開始位置とされても良い。
【0094】
また、同じような規則に基づいて各グループ内の更新ブロックが選択されなくても良い。例えば、横方向に更新ブロックが選択されるグループ、縦方向に更新ブロックが選択されるグループ、ジグザグに更新ブロックが選択されるグループなど、グループ毎に異なる規則で更新ブロックが選択されるようにしても良い。
【0095】
また、規則としてランダムに選択する規則もある。ランダムに更新ブロックが選択される場合、それぞれのグループで、ランダムな位置が選択されるようにしても良いし、ランダムに選択された位置が、全てのグループに適用されるようにしても良い。前者の場合は、例えば、右上、左下、右上から横方向に2番目、中央、といったように、各グループ内で選択される更新ブロックの位置は異なる。後者は、例えば、ランダムに設定された位置が右上であれば、各グループの右上に位置するブロックが更新ブロックとされる。
【0096】
また、グローバルチェンジ検出部41とデフォーカス検出部42は、それぞれ、図13に示した一例としての更新ブロックの選択に基づいて更新ブロックを選択し、その更新ブロック内に変化(異常)があるか否かを判定する。監視カメラにより撮像される1画像内で、何らかの妨害があったときに、変換(異常)が検出されやすい領域(ブロック)がある場合、その領域が他の領域よりも多く選択されるようにしても良い。換言すれば、各グループ内のブロックの全てが同一時間内に同一回数選択されるようにしても良いし、異なる回数選択されるようにしても良い。
【0097】
図12に示したフローチャートの説明に戻る。ステップS4において、ヒストグラム生成部64は、更新領域のヒストグラムを生成する。ステップS5において、ヒストグラム保存部62は、ステップS4で生成されたヒストグラムを保存する。ヒストグラム保存部62は、過去のデータをヒストグラムとして保存するので、例えば画素値などの画像データとして保存する場合に比べて、記憶容量を小さくし、低コスト化することができる。
【0098】
ステップS6において、正規化処理部65は、ヒストグラム生成部64から供給される現在のフレームの更新対象のブロックのヒストグラムに基づいて正規化の要否を判定し、必要に応じて正規化する正規化処理を実行する。
【0099】
ステップS7において、類似度演算部71は、現在のフレームの更新対象の各ブロックについて、現在のヒストグラムと、それに対応する過去のヒストグラムとの類似度を演算する。なお、ステップS6で正規化を行うと判定された場合には、正規化後のヒストグラムを用いて類似度が演算される。
【0100】
ステップS8において、閾値判定部72は、現在のフレームの更新対象の各ブロックについて、変化領域であるか否かを判定する。すなわち、ステップS7で演算された類似度Dが、予め定められた所定の閾値Thdと比較される。類似度Dが閾値Thdより小さいとき、そのブロックは変化があった領域であると判定される。直近の過去のNフレームのうち、類似度Dが閾値Thdより小さいフレームが1フレームでもあった場合、領域に変化があったと判定される。
【0101】
ステップS9において、変化領域保存部67は、現在のフレームの更新対象の各ブロックについて、判定結果を更新する。すなわち変化領域保存部67は、ブロック毎に1フレーム分の判定結果(つまり、ブロック数分の判定結果)を保存しており、ステップS8での判定結果により古い判定結果を更新する。
【0102】
ステップS10において、カウンタ部68は、全領域の変化領域数をカウントする。即ち、変化判定部66からの、現在のフレームの更新対象のブロックの判定結果(変化の有無)と、変化領域保存部67からの、現在のフレームの更新対象のブロック以外のブロックの判定結果とに基づいて、監視対象の画像のフレームを構成する64個のブロック全体で、変化領域とされるブロックの数がカウントされる。
【0103】
ステップS11において、閾値判定部69は、カウントされた変化領域数が閾値より大きいかを判定する。より具体的には、ステップS10でカウントされた変化領域とされたブロックの数が、予め定められている所定の閾値Thcと比較される。
【0104】
ステップS11で、カウントされた変化領域数が閾値より大きいと判定された場合、処理はステップS12に進み、閾値判定部69は、妨害行為があったことを示すアラームなどの信号を出力する。一方、ステップS11で、カウントされた変化領域数が閾値以下であると判定された場合、およびステップS12の処理の後、妨害行為検出処理は終了する。
【0105】
以上の処理は、フレーム毎に実行される。
【0106】
[正規化処理の詳細]
図14は、図12のステップS6として実行される正規化処理の詳細なフローチャートである。この処理では、初めに、ステップS31において、正規化判定部81は、更新対象の各ブロックについて、現在のヒストグラムと過去のヒストグラムそれぞれの平均値を算出する。
【0107】
ステップS32において、正規化判定部81は、更新対象の各ブロックについて、ヒストグラムの平均値の変化方向を判定する。即ち、正規化判定部81は、更新対象の各ブロックについて、過去から現在へのヒストグラムの平均値の変化の方向が、増加、減少、または変動なし、のいずれであるかを判定する。
【0108】
ステップS33において、正規化判定部81は、画面全体について変化方向をカウントする。具体的には、正規化判定部81は、更新対象ではないブロックについて同様に判定したときの判定結果を平均値保存部83から取得し、更新対象の各ブロックの判定結果とともに、画面全体について、増加、減少、変動なし、のそれぞれのブロック数がカウントされる。
【0109】
ステップS34において、正規化判定部81は、画面全体として、増加または減少のどちらかに一定以上の偏りがあるかを判定する。ステップS34で、増加および減少のいずれにも一定以上の偏りがないと判定された場合、処理はステップS35に進み、正規化判定部81は、更新対象の各ブロックの現在と過去のヒストグラムそれぞれを、そのまま変化判定部66に出力する。
【0110】
一方、ステップS34で、増加または減少のどちらかに一定以上の偏りがあると判定された場合、処理はステップS36に進み、正規化判定部81は、更新対象の各ブロックの現在と過去のヒストグラムそれぞれを正規化値算出部82に供給する。そして、正規化値算出部82は、画面全体から異常領域を除外した有効領域の各ブロックの変化率を算出する。
【0111】
より具体的には、更新対象の各ブロックについて、現在と過去のヒストグラムそれぞれの平均値が算出される。また、更新対象のブロック以外のブロックについては、現在と過去のヒストグラムそれぞれの平均値が平均値保存部83から取得される。そして、画面全体の変化方向に応じて有効領域が決定され、有効領域とされた各ブロックについて過去のヒストグラムの平均値と現在のヒストグラムの平均値の一方を他方で除算することにより、有効領域の各ブロックの変化率が求められる。
【0112】
ステップS37において、正規化値算出部82は、有効領域とされた各ブロックについて求めた変化率の平均値を算出し、その結果を正規化値に決定する。ステップS38において、正規化部84は、ステップS37で算出された正規化値を用いて、現在または過去のヒストグラムを引き延ばすストレッチングを行う。
【0113】
ステップS39において、正規化部84は、引き延ばしたヒストグラムに対し、正規化の前後で面積が同一となるように調整する。即ち、ストレッチング前後の面積倍率の逆数を、引き延ばしたヒストグラムの各輝度値の度数に乗算することで、正規化の前後で面積が同一となるように調整される。
【0114】
ステップS40において、正規化部84は、正規化後のヒストグラムを変化判定部66に出力する。即ち、正規化部84は、正規化された現在または過去のヒストグラムと残りの一方を、変化判定部66に出力する。
【0115】
ステップS40の処理後、または、ステップS35の処理後、正規化処理は終了し、図12の妨害行為検出処理に戻る。
[ブロックの形状]
上記した図13に示す実施の形態においては、ブロックを横長の形状として、その長手方向、すなわち横方向に移動させるようにしたが、このような形状に本技術の適用が限定されるのではない。例えば、ブロックの形状を、移動方向と垂直な方向に長い形状にすることができる。換言すれば、ブロックをその長手方向と垂直な方向に移動させることができる。
【0116】
図15は、ブロックの形状を示す図である。図15においては、画面が上半分と下半分に区分され、それぞれが8個のブロックb11乃至b18,b21乃至b28に分割されている。その結果、各ブロックは縦長の形状とされている。そして更新時のブロックの移動方向は、長手方向と垂直な方向、すなわち横方向とされている。例えば撮像部が横方向にしか移動できないなどの理由で、妨害行為が横方向に限られる場合、横方向の移動のみが検出できればよい。そこで、図15に示されるように、変化の方向に対して平行な辺より垂直な辺が長くなる形状のブロックとすることができる。
【0117】
図16は、ブロックの形状を示す図である。図16においては、画面が左半分と右半分に区分され、それぞれが8個のブロックb11乃至b81,b12乃至b82に分割されている。その結果、各ブロックは横長の形状とされている。そして更新時のブロックの移動方向は、長手方向と垂直な方向、すなわち縦方向とされている。例えば撮像部が縦方向にしか移動できないなどの理由で、妨害行為が縦方向に限られる場合、縦方向の移動のみが検出できればよい。そこで、図16に示されるように、変化の方向に対して平行な辺より垂直な辺が長くなる形状のブロックとすることができる。
【0118】
以上のように、正規化処理によれば、正規化を行うか否かを判定し、必要に応じてヒストグラムの正規化が行われる。具体的には、画面全体の変化の方向に増加または減少の一定以上の偏りがある場合に、ヒストグラムの正規化が行われる。これにより、AE機能や照明変化などに起因する、妨害行為の誤検出を抑制することができる。また、一律に全てのヒストグラムを正規化した場合に生じる妨害行為の検出漏れを抑制することができる。さらに、ヒストグラムを正規化する際には、正規化値として、変化の方向が画面全体の変化の方向と異なる領域を除外した変化率を算出することで、精度良く正規化を行うことができる。
【0119】
このようにして、グローバルチェンジ検出部41により、グローバルチェンジに関する妨害、すなわち、監視カメラの向きを変えたり、布などを被せたりする妨害を、精度良く検知することが可能となる。次に、デフォーカス検出部42による処理について説明する。
【0120】
[デフォーカス検出部42の処理について]
次に、図17のフローチャートを参照して、画像処理装置11のデフォーカス検出部42による妨害行為検出処理について説明する。初めに、ステップS51において、取得部21はカメラ画像を取得する。すなわち撮像部が所定の監視対象を撮像しており、その撮像画像の画像データが取得される。
【0121】
ステップS52において、画像分割部102は、N個のブロックに画像を分割する。この実施の形態においては、画像データに基づく各フレームの画像が8×8個のブロックに分割される。ステップS53において、更新領域選択部101は、更新領域(更新対象のブロック)を選択する。すなわち、8×8個のブロックのうちの所定のM(M≦N)個のブロックが、更新対象のブロックとして選択される。この更新領域の選択は、図13を参照して説明した場合と同様に行うことが可能であるため、ここではその説明を省略する。
【0122】
ステップS51乃至S53の処理は、図12に示したフローチャートのステップS1乃至S3と同様に行われる。換言すれば、デフォーカス検出部42の更新領域設定部101と画像分割部102による処理は、図3に示したグローバルチェンジ検出部41の更新領域設定部61と画像分割部63による処理と同様の処理とすることができる。
【0123】
よって、デフォーカス検出部42の更新領域設定部101と画像分割部102が、グローバルチェンジ検出部41の更新領域設定部61と画像分割部63と共用される構成とすることも可能である。例えば、図5に示したデフォーカス検出部42の更新領域設定部101と画像分割部102を、デフォーカス検出部42から削除した構成とし、グローバルチェンジ検出部41の更新領域設定部61から更新領域の設定を受け、画像分割部63から分割された画像領域の画像群の供給を受ける構成とすることも可能である。
【0124】
勿論、グローバルチェンジ検出部41とデフォーカス検出部42が、それぞれ異なる領域を処理する、異なる大きさの領域を処理するなどの場合、図3と図5にそれぞれ示したように、グローバルチェンジ検出部41とデフォーカス検出部42がそれぞれ構成される。また、グローバルチェンジ検出部41とデフォーカス検出部42が、それぞれフレーム毎に処理する領域数が異なっていても良く、異なる領域数が処理される場合には、図3と図5にそれぞれ示したように、グローバルチェンジ検出部41とデフォーカス検出部42がそれぞれ構成される。
【0125】
例えば、グローバルチェンジ検出部41は、1フレームを4つのグループに分割し、それぞれのグループから、1領域(1ブロック)を処理対象とし、合計4領域を処理対象として処理する(図13を参照して説明したように処理する)。これに対して、デフォーカス検出部42は、グローバルチェンジ検出部41と同じく、1フレームを4つのグループに分割し、それぞれのグループから、1領域(1ブロック)を処理対象とするが、全てのブロックを順次処理対象として処理を行うようにしても良い。
【0126】
ステップS54において、高周波フィルタ104は、更新領域を所定のフィルタでフィルタリングする。このフィルタリング処理が施されることで、更新領域内のエッジが抽出される。ステップS55において、エッジ強度カウンタ106は、処理対象とされている領域から算出されたエッジの強度をカウントする。そして、そのカウント値を用いて、ステップS56において、閾値判定部107は、現在のフレームの更新対象の各ブロックについて、異常領域であるか否かを判定する。この高周波フィルタ104、異常判定部105(エッジ強度カウンタ106と閾値判定部107)の処理について、説明を加える。
【0127】
高周波フィルタ104は、入力された所定領域内の画像に含まれる高周波成分を抽出する。例えば、高周波フィルタ104の伝達関数HをZ変換で表現すると、下記の式(2)により表現される。但し、表記を簡単にするため、同式は1次元で表現されているが入力画像は2次元であるため、実際には同式を2次元に拡張したものが用いられる。
【0128】
【数1】
【0129】
なお、ウェーブレット変換等の変換処理を用いて高周波成分を抽出するように高周波フィルタ104が構成されていてもよい。高周波フィルタ104で抽出された入力画像の高周波成分は、入力画像(処理対象とされている領域内の画像)のエッジ強度を表す。このようなエッジ強度は、エッジ強度カウンタ106に入力される。エッジ強度カウンタ106においては、高周波フィルタ104を通過した高周波成分の領域内で周波数成分の値が算出される。
【0130】
エッジ強度カウンタ106は、算出した周波数成分の値が所定の閾値(以下、高周波閾値)を越える画素の個数をカウントする。また領域内の各画素の高周波成分の値を加算することで累積値を算出する。すなわち、エッジ強度カウンタ106は、領域内のエッジ強度の高い画素の画素数と、領域内のエッジ強度の累積値を算出する。
【0131】
さらに累積値は、エッジ強度の高い画素数で除算されることで平均値が算出され、その平均値が以下の処理に用いられる。
エッジ強度の平均値=累積値/エッジ強度の高い画素数
なお、エッジ強度の高い画素数が0の場合、すなわち、算出された周波数成分の値が高周波閾値を超えた画素が無かった場合、エッジ強度の平均値は0として扱われる。
【0132】
この画素数と累積値が、閾値判定部107により所定の閾値と比較されることで、処理対象とされている領域に異常が生じているか否かが判定される。閾値判定部107は、以下の判定式を有している。
判定式1 エッジ強度が閾値より高い画素数<画素数の閾値(defocus consensus rate)
判定式2 エッジ強度の平均値<エッジ強度値の閾値(defocus noise th)
【0133】
判定式1は、エッジ強度が低い画素数が多いか否かを判定するための式である。監視カメラのフォーカスがずらされると、ぼやけた画像が撮像され、そのために、エッジ自体もぼやけ、エッジ強度の低い画素値が多い領域となる可能性がある。判定式1では、このような状況を検出するための式である。
【0134】
判定式2は、エッジ強度が全体的に低い領域であるか否かを判定するための式である。監視カメラのフォーカスがずらされていない状態であれば、ピントがあった画像が撮像されるため、エッジが存在する領域は、エッジ強度の累積値は高くなり、エッジ強度の高い画素数は少なくなる傾向にある。よってピントが合っている画像の所定の領域においては、エッジ強度の平均値は、高い値となる傾向にある。
【0135】
これに対して、監視カメラのフォーカスがずらされると、ぼやけた画像が撮像され、そのために、エッジが抽出されづらい画像(領域)となり、エッジが広がったようなぼけた領域となる。このような領域においては、エッジが存在する領域であっても、エッジ強度の累積値は低くなり、エッジ強度の高い画素数は多くなる傾向にある。よって、ピントが合っていない画像の所定の領域においては、エッジ強度の平均値は低い値となる傾向にある。
【0136】
閾値判定部107は、判定式1または判定式2のいずれか一方が少なくとも満たされるとき、処理対象とされた領域には、異常があると判定する。すなわち、閾値判定部107は、判定式1と判定式2の論理和を取り、その論理和を判定結果として、後段のカウンタ部110(図5)に出力する。
【0137】
図17のフローチャートの説明に戻り、ステップS56において、異常領域であるか否かが判定されると、ステップS57において、異常領域保存部108は、現在のフレームの更新対象の各ブロックについて、判定結果を更新する。すなわち異常領域保存部108は、ブロック毎に1フレーム分の判定結果(すなわち、ブロック数分の判定結果)を保存しており、ステップS56での判定結果により古い判定結果を更新する。
【0138】
ステップS58において、カウンタ部110は、全領域の異常領域数をカウントする。即ち、異常判定部105からの、現在のフレームの更新対象のブロックの判定結果(変化の有無)と、異常領域保存部108からの、現在のフレームの更新対象のブロック以外のブロックの判定結果とに基づいて、監視対象の画像のフレームを構成する64個のブロック全体で、異常領域とされるブロックの数がカウントされる。
【0139】
ステップS59において、閾値判定部111は、カウントされた異常領域数が閾値より大きいかを判定する。より具体的には、ステップS59でカウントされた異常領域とされたブロックの数が、予め定められている所定の閾値Thcと比較される。ここでは、予め定められている所定の閾値Thcと比較されるとして説明を続けるが、所定数前のフレームの異常領域の数を閾値Thcとすることも可能である。
【0140】
ステップS59で、カウントされた異常領域数が閾値より大きいと判定された場合、処理はステップS60に進み、閾値判定部111は、妨害行為があったことを示すアラームなどの信号を出力する。ただし、ステップS60において出されるアラームは、後段の処理部に妨害行為が行われた可能性のあることを知らせる信号である。一方、ステップS59で、カウントされた異常領域数が閾値以下であると判定された場合、およびステップS60の処理の後、デフォーカス検出処理は終了する。
【0141】
以上の処理は、フレーム毎に実行される。
【0142】
このようにして、デフォーカス検出部42により、デフォーカスに関する妨害、すなわち、監視カメラのフォーカスをずらしたり、ズームをずらしたりする妨害を、精度良く検知することが可能となる。
【0143】
[妨害検知の統合について]
ここで、再度図2を参照する。図2に示したように、本実施の形態においては、監視カメラに対する妨害のうちのグローバルチェンジに関する妨害を検出するグローバルチェンジ検出部41と、監視カメラに対する妨害のうちのデフォーカスに関する妨害を検出するデフォーカス検出部42で、それぞれ妨害の有無を検出する。そして、それぞれの検出部で検出された結果を統合し、最終的な妨害の有無の結果を出す検出結果統合部43が備えられている。
【0144】
この検出結果統合部43は、例えば、図18に示すようなテーブルを保持し、そのテーブルに基づき、2つの検出部からの結果を統合し、最終的な結果を出す。図18を参照するに、グローバルチェンジ検出部41からの検出結果が、異常なしとの結果であり、デフォーカス検出部42からの検出結果も異常なしとの結果である場合、異常なしとの判定がされる。
【0145】
グローバルチェンジ検出部41からの検出結果が、異常なしとの結果であり、デフォーカス検出部42からの検出結果が、異常ありとの結果である場合、フォーカスずらしの妨害が発生したと判定される。
【0146】
グローバルチェンジ検出部41からの検出結果が、異常ありとの結果であり、かつ、ヒストグラムの異常が、輝度が同一方向に変化する異常であるとの結果であり、デフォーカス検出部42からの検出結果が、異常なしとの結果である場合、首ふりの妨害が発生したと判定される。
【0147】
グローバルチェンジ検出部41からの検出結果が、異常ありとの結果であり、かつ、ヒストグラムの異常が、輝度が同一方向に変化する異常であるとの結果であり、デフォーカス検出部42からの検出結果が、異常ありとの結果である場合、覆いの妨害が発生したと判定される。
【0148】
グローバルチェンジ検出部41からの検出結果が、異常ありとの結果であり、かつ、ヒストグラムの異常が、輝度が複数方向に変化する異常であるとの結果であり、デフォーカス検出部42からの検出結果が、異常なしとの結果である場合、首ふりの妨害が発生したと判定される。
【0149】
グローバルチェンジ検出部41からの検出結果が、異常ありとの結果であり、かつ、ヒストグラムの異常が、輝度が複数方向に変化する異常であるとの結果であり、デフォーカス検出部42からの検出結果が、異常ありとの結果である場合、ズームずらしの妨害が発生したと判定される。
【0150】
このようなテーブルに基づき、検出結果の統合が行われ、最終的な検出結果が出力される際の、検出結果統合部43の処理について、図19のフローチャートを参照して説明する。なお、ここでは、処理の一例を示し、判定の順序などに限定を示すものではない。
【0151】
ステップS71において、グローバルチェンジ検出部41からの検出結果が、妨害を検出したことを示しているか否かが判定される。ステップS71において、グローバルチェンジは、検出されていないと判定された場合、ステップS72に処理が進められる。ステップS72において、デフォーカス検出部42からの検出結果が、妨害を検出したことを示しているか否かが判定される。ステップS72において、デフォーカスは検出されていないと判定された場合、ステップS73に処理が進められる。
【0152】
この場合、グローバルチェンジとデフォーカスの両方が検出されていないために、監視カメラに対する妨害は検出されていないと判定され、異常なしと判定される。
【0153】
一方、ステップS72において、デフォーカスが検出されたと判定された場合、処理は、ステップS74に進められる。この場合、グローバルチェンジは検出されていないが、デフォーカスは検出されているので、監視カメラに対する妨害が検出され、かつその妨害は、フォーカスずらしであると判定される。
【0154】
フォーカスがずらされる妨害の場合、監視カメラからの画像は、輝度が大きく変化しない可能性もあり、グローバルチェンジ検出部41で妨害が発生したと検出されないことがある。しかしながら、エッジ強度が低下する傾向にあるため、デフォーカス検出部42で妨害が発生したと検出される。よって、ステップS74においては、フォーカスずらしの妨害が発生したと判定される。
【0155】
この判定結果は、監視カメラを管理する管理者に通知される。通知される際、単に、妨害が発生したことを通知するだけでなく、その妨害が、フォーカスずらしであることも通知することができる。
【0156】
このように、妨害の種類までも通知できるようになることで、管理者は、妨害の種類に対する適切な処理を即座にとることが可能となる。例えば、フォーカスずらしであることが通知されたときには、フォーカスを元に戻すという対処を行えば良いことが、単に妨害が発生したことを通知された時よりもはるかに早く認識でき、対処することが可能となる。またフォーカスを管理者の指示によらず合わせる機能を有する監視カメラの場合、フォーカスずらしの妨害が発生したことを検知した時点で、フォーカスを合わすといった制御を開始することも可能となる。このようなことは、妨害の種類が判別できることで、行うことができるようになる制御である。
【0157】
図19のフローチャートの説明に戻り、ステップS71において、グローバルチェンジが検出された場合、ステップS75に処理が進められる。ステップS75において、輝度が同一方向に変化しているか否かが判定される。ステップS75において、輝度が同一方向に変化していると判定された場合、ステップS76に処理が進められる。ステップS76において、デフォーカスが検出されたか否かが判定される。
【0158】
ステップS76において、デフォーカスが検出されたと判定された場合、ステップS77に処理が進められる。この場合、輝度が同一方向に変化するグローバルチェンジが検出され、デフォーカスが検出された状況である。このような状況は、監視カメラに布などが被せられた覆いという妨害が発生したと判定される。
【0159】
布などにより監視カメラが覆われた場合、輝度値が一様に変化する傾向にある。よって、グローバルチェンジ検出部41により、輝度が同一方向に変化する異常が検出される。また、布などにより監視カメラが覆われた場合、監視カメラで撮像されている画像からエッジが無くなり(減少し)、エッジ強度が低下する可能性が高い。
【0160】
よって、グローバルチェンジ検出部41とデフォーカス検出部42のそれぞれで、異常ありとの検出結果が出力される。また、グローバルチェンジ検出部41により、輝度が同一方向に変化する異常が検出されていれば、覆いの妨害が発生したと判定することができる。この場合も、妨害が発生したことを通知するだけでなく、その妨害が、覆いあることも通知することができるので、管理者が対処をとるまでの時間を短縮することが可能となる。
【0161】
また、通知する際、対処法が通知されるようにしても良い。例えば、このような覆いという妨害が検出されたときには、”覆い妨害が発生したので、被せられている布などを至急取り除いてください”といったメッセージが妨害発生の通知として通知されるようにしてもよい。また、妨害が発生したことが検出された監視カメラの付近を映し出せる他の監視カメラに映像が切り換えられるなどの対処がされるようにしてもよい。
【0162】
一方、ステップS76において、デフォーカスは検出されていないと判定された場合、ステップS78に処理が進められる。この場合、輝度が同一方向に変化するグローバルチェンジが検出されたが、デフォーカスは検出されていない状況である。このような状況は、監視カメラの方向が他の方向にされた首ふりという妨害が発生したと判定される。
【0163】
首振りの場合、監視カメラの方向が変えられるため、撮像される画像が、首振りの前後で異なる。よって、輝度値が変化するので、グローバルチェンジ検出部41により妨害が発生しと検出される。しかしながら、首振り後に監視カメラで撮像される画像も、ピントが合っている状態であるとエッジ強度の変化が小さく、デフォーカス検出部42で妨害が検出されないことも有る。このような場合であっても、グローバルチェンジ検出部41とデフォーカス検出部42を備えることで、グローバルチェンジ検出部41で妨害を検出することができ、かつ、その妨害が首振りであると判定することができる。
【0164】
この場合も、妨害が発生したことを通知するだけでなく、その妨害が、首ふりであることも通知することができるので、管理者が対処をとるまでの時間を短縮することが可能となる。首振りの場合、監視カメラが設置されているところまで管理者が行って、正しい位置に直す、遠隔操作で、パンやチルトを制御できる機能を有する監視カメラであれば、遠隔操作で、正しい位置に直すといった対処がとられる。
【0165】
一方、ステップS75において、輝度が同一方向に変化していないと判定された場合、換言すれば、輝度が複数方向に変化していると判定された場合、ステップS79に処理が進められる。ステップS79において、デフォーカスが検出されたか否かが判定される。ステップS79において、デフォーカスが検出されたと判定された場合、ステップS80に処理が進められる。
【0166】
この場合、輝度が複数方向に変化するグローバルチェンジが検出され、デフォーカスが検出された状況である。このような状況は、監視カメラのズームがずらされたズームずらしという妨害が発生したと判定される。監視カメラのズームがずらされると、撮像される画像が変化するため、輝度値が変化する可能性が高い。しかしながら、布などで監視カメラが覆われた場合と異なり、一様に輝度値が変化する可能性は低い。よって、グローバルチェンジ検出部41においては、輝度値が複数方向に変化する異常が検出される。
【0167】
また、監視カメラのズームがずらされ、撮像される画像が変化することで、エッジ強度も変化する可能性が高い。よって、デフォーカス検出部42でも異常が検出される。このようなときには、ズームずらしの妨害が発生したと判定される。
【0168】
この場合も、妨害が発生したことを通知するだけでなく、その妨害が、ズームずらしであることも通知することができるので、管理者が対処をとるまでの時間を短縮することが可能となる。管理者は、監視カメラが設置されているところまで行って、正しいズーム位置に直す、遠隔操作で、ズームを制御できる機能を有する監視カメラであれば、遠隔操作で、正しいズーム位置に直すといった対処がとられる。
【0169】
一方、ステップS79において、デフォーカスは検出されていない判定された場合、ステップS78に処理が進められる。この場合、輝度が複数方向に変化するグローバルチェンジが検出されたが、デフォーカスは検出されていない状況である。このような状況は、監視カメラの方向が他の方向にされた首ふりという妨害が発生したと判定される。
【0170】
この場合も、妨害が発生したことを通知するだけでなく、その妨害が、首ふりであることも通知することができるので、管理者が対処をとるまでの時間を短縮することが可能となる。
【0171】
このように、グローバルチェンジ検出部41からの検出結果と、デフォーカス検出部42からの検出結果を統合することで、監視カメラに対する妨害が発生したことを検出することができるだけでなく、その妨害が、どのような妨害であるのか、妨害の種類までも検出することが可能となる。また、グローバルチェンジ検出部41とデフォーカス検出部42で、それぞれ妨害を検出するので、検出漏れや誤検出を低減させることが可能となる。
【0172】
妨害の種類を検出することが可能となることで、妨害の種類も管理者に通知することができるようになり、管理者が、妨害に対する対処を取りやすくなる。妨害の種類によっては、監視カメラ側で妨害を除去できる場合もある。このような場合、妨害の種類がわかることで、監視カメラ自体が、その妨害を除去できるか否かを判定し、除去できるときには、管理者の指示を待たずに、妨害の除去を開始することが可能となる。
【0173】
また、上述した実施の形態においては、グローバルチェンジ検出部41とデフォーカス検出部42は、それぞれ、1画像を複数の領域に分割し、領域毎に、妨害が発生した可能性があるか否かを判定し、領域毎の判定結果を用いて1画像における妨害が発生したか否かの判定を行うようにした。よって、例えば、一部の領域に極端にエッジ強度が強い領域があるような画像であっても、その領域に依存することなく、妨害の検知を行うことが可能となる。すなわち、より精度良く妨害の検知を行うことが可能となる。
【0174】
[記録媒体について]
上述した一連の処理は、ハードウェアにより実行することもできるし、ソフトウエアにより実行することもできる。一連の処理をソフトウエアにより実行する場合には、そのソフトウエアを構成するプログラムが、コンピュータにインストールされる。ここで、コンピュータには、専用のハードウェアに組み込まれているコンピュータや、各種のプログラムをインストールすることで、各種の機能を実行することが可能な、例えば汎用のパーソナルコンピュータなどが含まれる。
【0175】
図20は、上述した一連の処理をプログラムにより実行するコンピュータのハードウェアの構成例を示すブロック図である。
【0176】
コンピュータにおいて、CPU(Central Processing Unit)1001,ROM(Read Only Memory)1002,RAM(Random Access Memory)1003は、バス1004により相互に接続されている。バス1004には、さらに、入出力インタフェース1005が接続されている。入出力インタフェース1005には、入力部1006、出力部1007、記憶部1008、通信部1009、及びドライブ1010が接続されている。
【0177】
入力部1006は、キーボード、マウス、マイクロフォンなどよりなる。出力部1007は、ディスプレイ、スピーカなどよりなる。記憶部1008は、ハードディスクや不揮発性のメモリなどよりなる。通信部1009は、ネットワークインタフェースなどよりなる。ドライブ1010は、磁気ディスク、光ディスク、光磁気ディスク、又は半導体メモリなどのリムーバブルメディア1011を駆動する。
【0178】
以上のように構成されるコンピュータでは、CPU1001が、例えば、記憶部1008に記憶されているプログラムを、入出力インタフェース1005及びバス1004を介して、RAM1003にロードして実行することにより、上述した一連の処理が行われる。
【0179】
コンピュータ(CPU1001)が実行するプログラムは、例えば、パッケージメディア等としてのリムーバブルメディア1011に記録して提供することができる。また、プログラムは、ローカルエリアネットワーク、インターネット、デジタル衛星放送といった、有線または無線の伝送媒体を介して提供することができる。
【0180】
コンピュータでは、プログラムは、リムーバブルメディア1011をドライブ1010に装着することにより、入出力インタフェース1005を介して、記憶部1008にインストールすることができる。また、プログラムは、有線または無線の伝送媒体を介して、通信部1009で受信し、記憶部1008にインストールすることができる。その他、プログラムは、ROM1002や記憶部1008に、あらかじめインストールしておくことができる。
【0181】
なお、コンピュータが実行するプログラムは、本明細書で説明する順序に沿って時系列に処理が行われるプログラムであっても良いし、並列に、あるいは呼び出しが行われたとき等の必要なタイミングで処理が行われるプログラムであっても良い。
【0182】
また、本明細書において、システムとは、複数の装置により構成される装置全体を表すものである。
【0183】
なお、本技術の実施の形態は、上述した実施の形態に限定されるものではなく、本技術の要旨を逸脱しない範囲において種々の変更が可能である。
【0184】
なお、本技術は以下のような構成も取ることができる。
【0185】
(1)
画像の画像データを取得する取得部と、
取得された前記画像をN(N>1)個のブロックに分割する分割部と、
新たな前記画像の前記画像データが取得される毎に、N個の前記ブロックのうちのM(N≧M>1)個の前記ブロックを、更新対象の前記ブロックとして順次指定する指定部と、
指定されたM個の前記ブロックの前記画像データに所定のフィルタによるフィルタリングを施すフィルタリング部と、
前記フィルタリング部からのフィルタリング結果が、所定の値より大きい画素をカウントするカウント部と、
前記カウント部によりカウントされた前記画素の数と所定の値を比較することで、前記ブロックに異常があるか否かを判定する第1の判定部と、
前記第1の判定部により異常があると判定された前記画像内のブロック数と所定の値を比較することで、妨害が発生したか否かを判定する第2の判定部と
を備える画像処理装置。
(2)
前記カウント部は、前記フィルタリング結果が、前記所定の値より大きい画素の数をカウントした画素数と、前記フィルタリング結果が、前記所定の値以上であると判定された画素の値を加算した累積値を前記画素数で除算した平均値を算出し、
前記第1の判定部は、前記画素数が所定の値より小さいか否かの第1の判定と、前記平均値が所定の値より小さいか否かの第2の判定を行い、前記第1の判定と前記第2の判定の論理和を判定結果とする
前記(1)に記載の画像処理装置。
(3)
指定されたM個の前記ブロックの前記画像データのヒストグラムを生成するヒストグラム生成部と、
生成された前記ヒストグラムを順次更新して保存するヒストグラム保存部と、
生成されたM個の前記ブロックの前記ヒストグラムと、保存されていた対応する過去のM個の前記ブロックの前記ヒストグラムの類似度に基づいて、取得された前記画像の変化を判定する変化判定部と、
前記ヒストグラムの正規化を行うか否かを判定する正規化判定部と、
前記正規化判定部において正規化を行うと判定された場合に、生成されたM個の前記ブロックの前記ヒストグラムか、または、保存されていた対応する過去のM個の前記ブロックの前記ヒストグラムのいずれか一方を正規化する正規化部と
をさらに備え、
前記変化判定部は、前記正規化部により前記ヒストグラムの正規化が行われた場合、正規化後の前記ヒストグラムを用いた類似度に基づいて、取得された前記画像の変化を判定し、変化があったと判定した場合、妨害があったと判定する
前記(1)または前記(2)のいずれかに記載の画像処理装置。
(4)
前記第2の判定部による判定結果と、前記変化判定部による判定結果を統合し、前記妨害の種類を判定する
前記(3)に記載の画像処理装置。
(5)
画像の画像データを取得し、
取得された前記画像をN(N>1)個のブロックに分割し、
新たな前記画像の前記画像データが取得される毎に、N個の前記ブロックのうちのM(N≧M>1)個の前記ブロックを、更新対象の前記ブロックとして順次指定し、
指定されたM個の前記ブロックの前記画像データに所定のフィルタによるフィルタリングを施し、
フィルタリング結果が、所定の値より大きい画素をカウントし、
カウントされた前記画素の数と所定の値を比較することで、前記ブロックに異常があるか否かを判定し、
異常があると判定された前記画像内のブロック数と所定の値を比較することで、妨害が発生したか否かを判定する
ステップを含む画像処理方法。
(6)
コンピュータに、
画像の画像データを取得し、
取得された前記画像をN(N>1)個のブロックに分割し、
新たな前記画像の前記画像データが取得される毎に、N個の前記ブロックのうちのM(N≧M>1)個の前記ブロックを、更新対象の前記ブロックとして順次指定し、
指定されたM個の前記ブロックの前記画像データに所定のフィルタによるフィルタリングを施し、
フィルタリング結果が、所定の値より大きい画素をカウントし、
カウントされた前記画素の数と所定の値を比較することで、前記ブロックに異常があるか否かを判定し、
異常があると判定された前記画像内のブロック数と所定の値を比較することで、妨害が発生したか否かを判定する
ステップを含む処理を実行させるためのコンピュータ読み取り可能なプログラム。
【符号の説明】
【0186】
11 画像処理装置, 21 取得部, 22 画像処理部, 31 撮像信号処理部, 32 データ保存部, 33 画像解析部, 41 グローバルチェンジ検出部, 42 デフォーカス検出部, 43 検出結果統合部, 61 更新領域選択部, 62 ヒストグラム保存部, 63 画像分割部, 64 ヒストグラム生成部, 65 正規化処理部, 66 変化判定部, 67 変化領域保存部, 68 カウンタ部, 69 閾値判定部, 71 類似度演算部, 72 閾値判定部, 81 正規化判定部, 82 正規化値算出部, 83 平均値保存部, 84 正規化部, 101 更新領域選択部, 102 画像分割部, 103 異常領域検出部, 104 高周波フィルタ, 105異常判定部, 106 エッジ強度カウンタ, 107 閾値判定部, 108 異常領域保存部, 109 妨害判定部, 110 カウンタ部, 111 閾値判定部
【特許請求の範囲】
【請求項1】
画像の画像データを取得する取得部と、
取得された前記画像をN(N>1)個のブロックに分割する分割部と、
新たな前記画像の前記画像データが取得される毎に、N個の前記ブロックのうちのM(N≧M>1)個の前記ブロックを、更新対象の前記ブロックとして順次指定する指定部と、
指定されたM個の前記ブロックの前記画像データに所定のフィルタによるフィルタリングを施すフィルタリング部と、
前記フィルタリング部からのフィルタリング結果が、所定の値より大きい画素をカウントするカウント部と、
前記カウント部によりカウントされた前記画素の数と所定の値を比較することで、前記ブロックに異常があるか否かを判定する第1の判定部と、
前記第1の判定部により異常があると判定された前記画像内のブロック数と所定の値を比較することで、妨害が発生したか否かを判定する第2の判定部と
を備える画像処理装置。
【請求項2】
前記カウント部は、前記フィルタリング結果が、前記所定の値より大きい画素の数をカウントした画素数と、前記フィルタリング結果が、前記所定の値以上であると判定された画素の値を加算した累積値を前記画素数で除算した平均値を算出し、
前記第1の判定部は、前記画素数が所定の値より小さいか否かの第1の判定と、前記平均値が所定の値より小さいか否かの第2の判定を行い、前記第1の判定と前記第2の判定の論理和を判定結果とする
請求項1に記載の画像処理装置。
【請求項3】
指定されたM個の前記ブロックの前記画像データのヒストグラムを生成するヒストグラム生成部と、
生成された前記ヒストグラムを順次更新して保存するヒストグラム保存部と、
生成されたM個の前記ブロックの前記ヒストグラムと、保存されていた対応する過去のM個の前記ブロックの前記ヒストグラムの類似度に基づいて、取得された前記画像の変化を判定する変化判定部と、
前記ヒストグラムの正規化を行うか否かを判定する正規化判定部と、
前記正規化判定部において正規化を行うと判定された場合に、生成されたM個の前記ブロックの前記ヒストグラムか、または、保存されていた対応する過去のM個の前記ブロックの前記ヒストグラムのいずれか一方を正規化する正規化部と
をさらに備え、
前記変化判定部は、前記正規化部により前記ヒストグラムの正規化が行われた場合、正規化後の前記ヒストグラムを用いた類似度に基づいて、取得された前記画像の変化を判定し、変化があったと判定した場合、妨害があったと判定する
請求項1に記載の画像処理装置。
【請求項4】
前記第2の判定部による判定結果と、前記変化判定部による判定結果を統合し、前記妨害の種類を判定する
請求項3に記載の画像処理装置。
【請求項5】
画像の画像データを取得し、
取得された前記画像をN(N>1)個のブロックに分割し、
新たな前記画像の前記画像データが取得される毎に、N個の前記ブロックのうちのM(N≧M>1)個の前記ブロックを、更新対象の前記ブロックとして順次指定し、
指定されたM個の前記ブロックの前記画像データに所定のフィルタによるフィルタリングを施し、
フィルタリング結果が、所定の値より大きい画素をカウントし、
カウントされた前記画素の数と所定の値を比較することで、前記ブロックに異常があるか否かを判定し、
異常があると判定された前記画像内のブロック数と所定の値を比較することで、妨害が発生したか否かを判定する
ステップを含む画像処理方法。
【請求項6】
コンピュータに、
画像の画像データを取得し、
取得された前記画像をN(N>1)個のブロックに分割し、
新たな前記画像の前記画像データが取得される毎に、N個の前記ブロックのうちのM(N≧M>1)個の前記ブロックを、更新対象の前記ブロックとして順次指定し、
指定されたM個の前記ブロックの前記画像データに所定のフィルタによるフィルタリングを施し、
フィルタリング結果が、所定の値より大きい画素をカウントし、
カウントされた前記画素の数と所定の値を比較することで、前記ブロックに異常があるか否かを判定し、
異常があると判定された前記画像内のブロック数と所定の値を比較することで、妨害が発生したか否かを判定する
ステップを含む処理を実行させるためのコンピュータ読み取り可能なプログラム。
【請求項1】
画像の画像データを取得する取得部と、
取得された前記画像をN(N>1)個のブロックに分割する分割部と、
新たな前記画像の前記画像データが取得される毎に、N個の前記ブロックのうちのM(N≧M>1)個の前記ブロックを、更新対象の前記ブロックとして順次指定する指定部と、
指定されたM個の前記ブロックの前記画像データに所定のフィルタによるフィルタリングを施すフィルタリング部と、
前記フィルタリング部からのフィルタリング結果が、所定の値より大きい画素をカウントするカウント部と、
前記カウント部によりカウントされた前記画素の数と所定の値を比較することで、前記ブロックに異常があるか否かを判定する第1の判定部と、
前記第1の判定部により異常があると判定された前記画像内のブロック数と所定の値を比較することで、妨害が発生したか否かを判定する第2の判定部と
を備える画像処理装置。
【請求項2】
前記カウント部は、前記フィルタリング結果が、前記所定の値より大きい画素の数をカウントした画素数と、前記フィルタリング結果が、前記所定の値以上であると判定された画素の値を加算した累積値を前記画素数で除算した平均値を算出し、
前記第1の判定部は、前記画素数が所定の値より小さいか否かの第1の判定と、前記平均値が所定の値より小さいか否かの第2の判定を行い、前記第1の判定と前記第2の判定の論理和を判定結果とする
請求項1に記載の画像処理装置。
【請求項3】
指定されたM個の前記ブロックの前記画像データのヒストグラムを生成するヒストグラム生成部と、
生成された前記ヒストグラムを順次更新して保存するヒストグラム保存部と、
生成されたM個の前記ブロックの前記ヒストグラムと、保存されていた対応する過去のM個の前記ブロックの前記ヒストグラムの類似度に基づいて、取得された前記画像の変化を判定する変化判定部と、
前記ヒストグラムの正規化を行うか否かを判定する正規化判定部と、
前記正規化判定部において正規化を行うと判定された場合に、生成されたM個の前記ブロックの前記ヒストグラムか、または、保存されていた対応する過去のM個の前記ブロックの前記ヒストグラムのいずれか一方を正規化する正規化部と
をさらに備え、
前記変化判定部は、前記正規化部により前記ヒストグラムの正規化が行われた場合、正規化後の前記ヒストグラムを用いた類似度に基づいて、取得された前記画像の変化を判定し、変化があったと判定した場合、妨害があったと判定する
請求項1に記載の画像処理装置。
【請求項4】
前記第2の判定部による判定結果と、前記変化判定部による判定結果を統合し、前記妨害の種類を判定する
請求項3に記載の画像処理装置。
【請求項5】
画像の画像データを取得し、
取得された前記画像をN(N>1)個のブロックに分割し、
新たな前記画像の前記画像データが取得される毎に、N個の前記ブロックのうちのM(N≧M>1)個の前記ブロックを、更新対象の前記ブロックとして順次指定し、
指定されたM個の前記ブロックの前記画像データに所定のフィルタによるフィルタリングを施し、
フィルタリング結果が、所定の値より大きい画素をカウントし、
カウントされた前記画素の数と所定の値を比較することで、前記ブロックに異常があるか否かを判定し、
異常があると判定された前記画像内のブロック数と所定の値を比較することで、妨害が発生したか否かを判定する
ステップを含む画像処理方法。
【請求項6】
コンピュータに、
画像の画像データを取得し、
取得された前記画像をN(N>1)個のブロックに分割し、
新たな前記画像の前記画像データが取得される毎に、N個の前記ブロックのうちのM(N≧M>1)個の前記ブロックを、更新対象の前記ブロックとして順次指定し、
指定されたM個の前記ブロックの前記画像データに所定のフィルタによるフィルタリングを施し、
フィルタリング結果が、所定の値より大きい画素をカウントし、
カウントされた前記画素の数と所定の値を比較することで、前記ブロックに異常があるか否かを判定し、
異常があると判定された前記画像内のブロック数と所定の値を比較することで、妨害が発生したか否かを判定する
ステップを含む処理を実行させるためのコンピュータ読み取り可能なプログラム。
【図1】

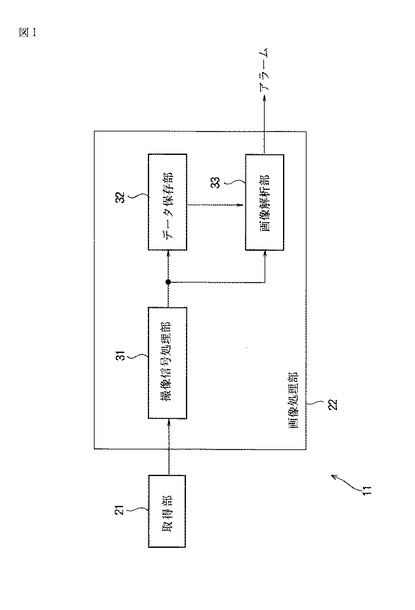
【図2】
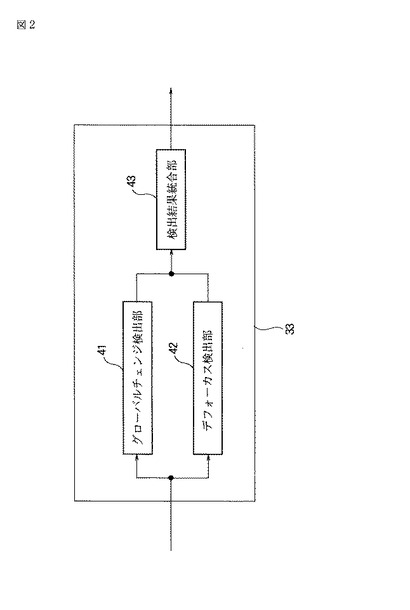
【図3】
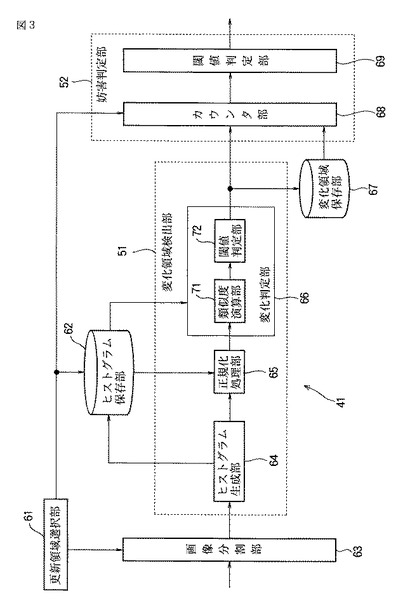
【図4】
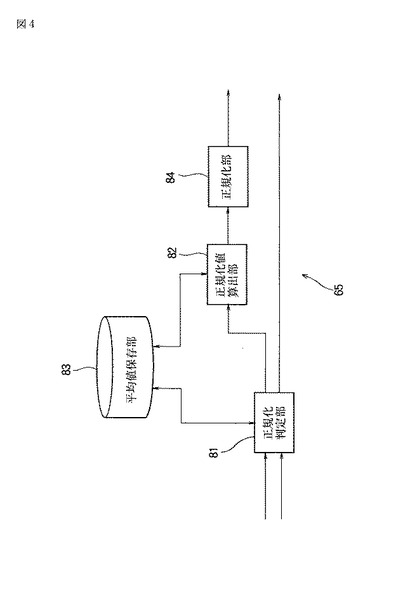
【図5】
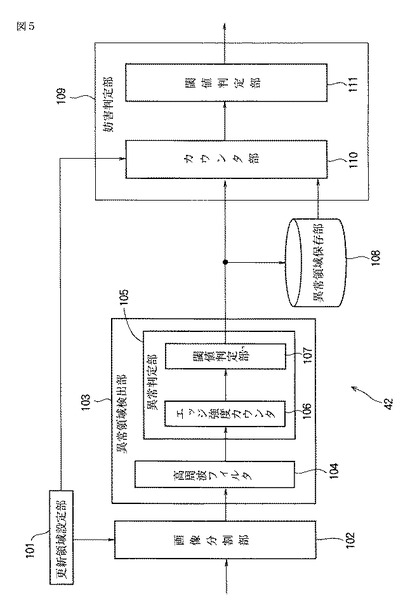
【図6】
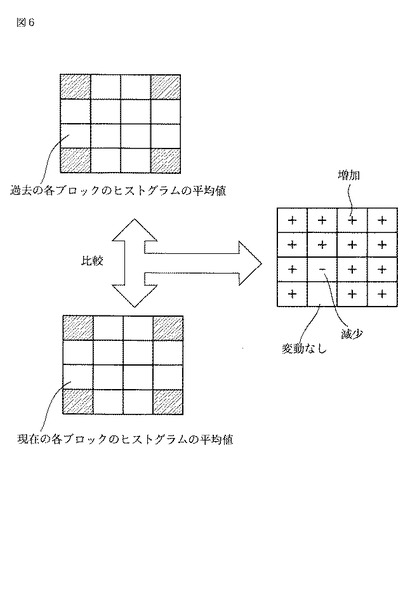
【図7】
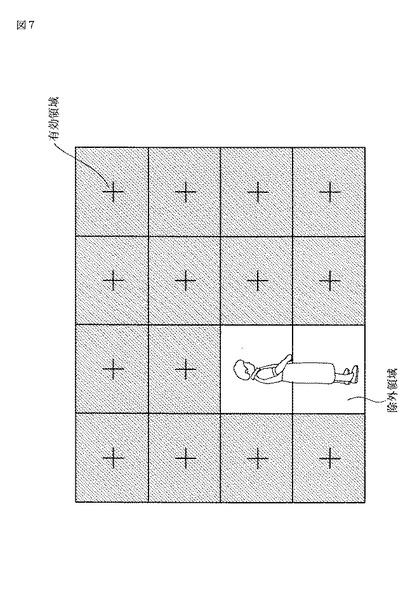
【図8】
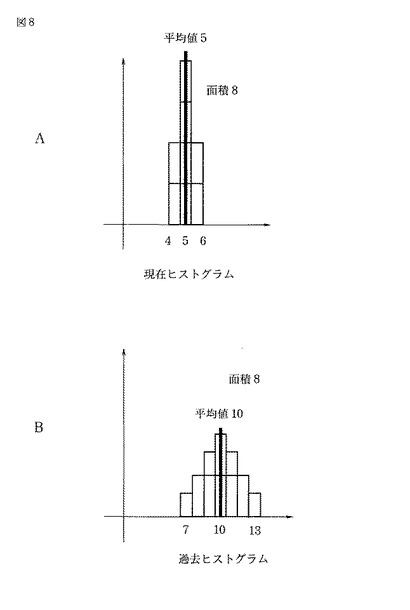
【図9】
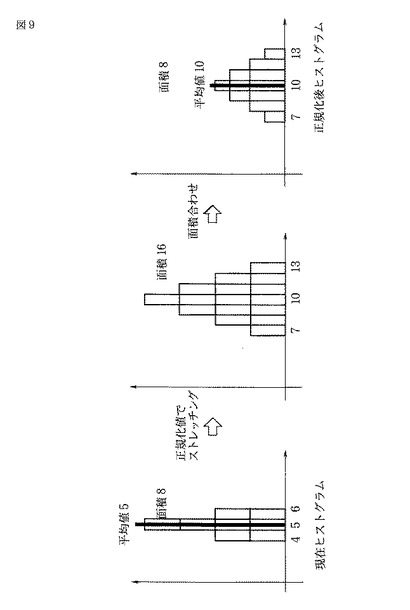
【図10】
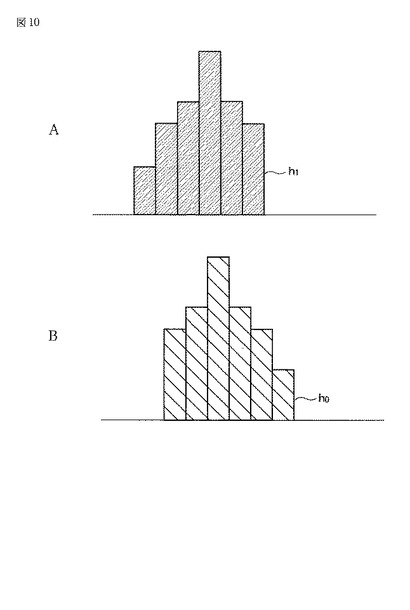
【図11】
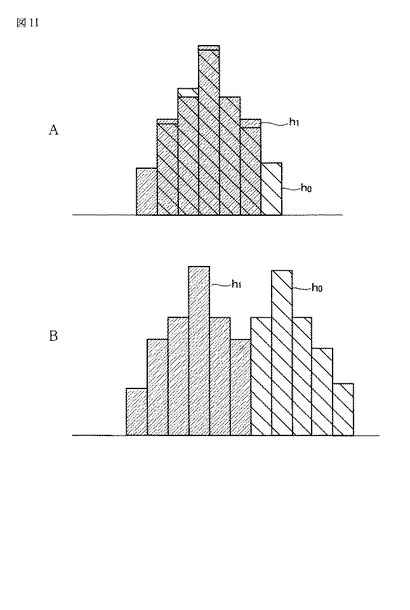
【図12】
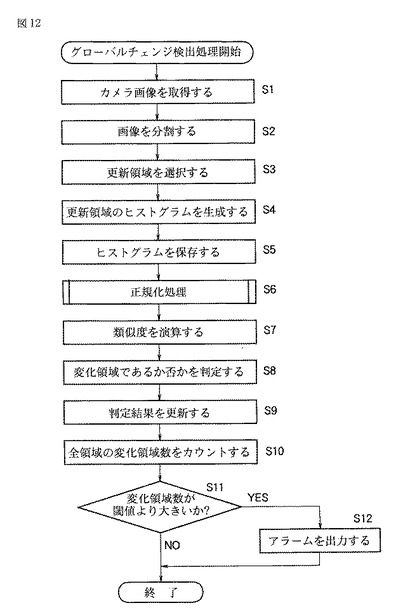
【図13】
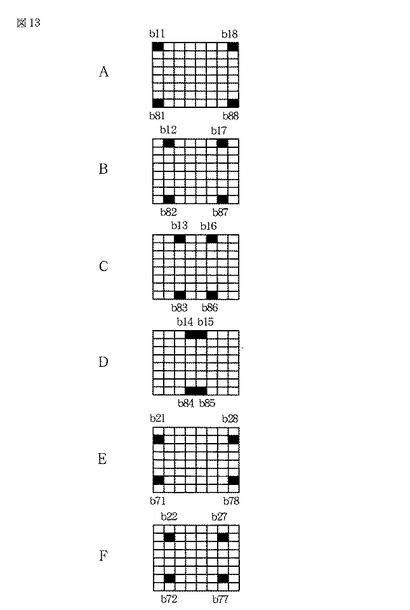
【図14】
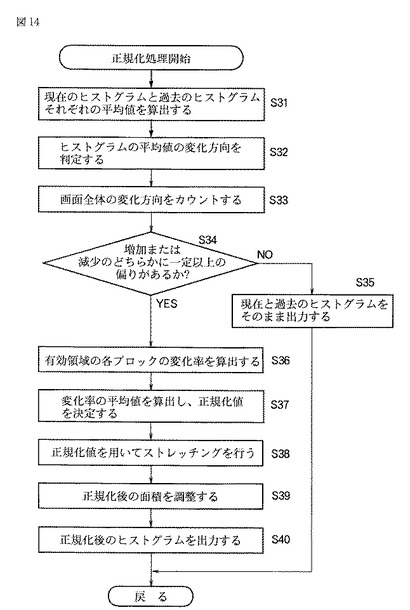
【図15】
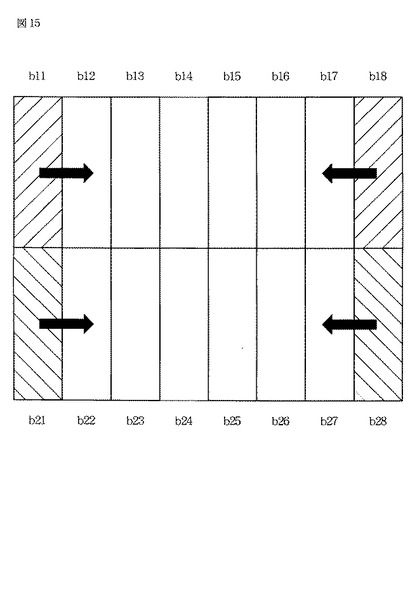
【図16】
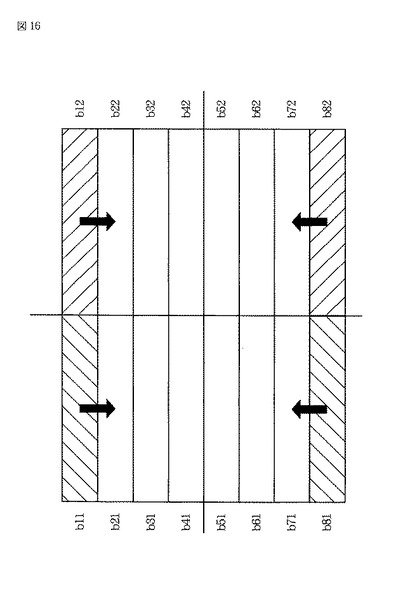
【図17】
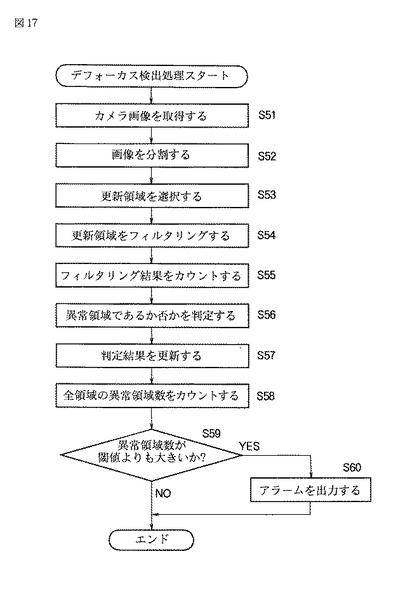
【図18】
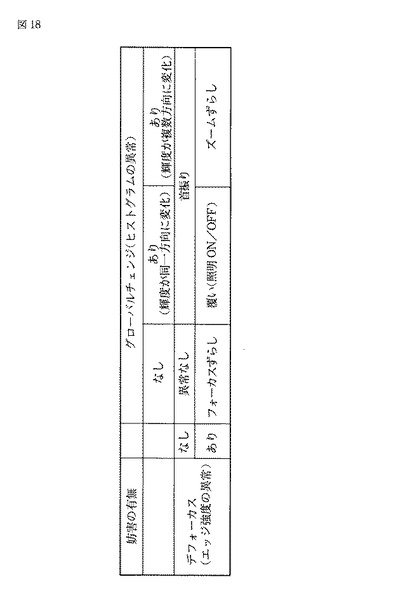
【図19】
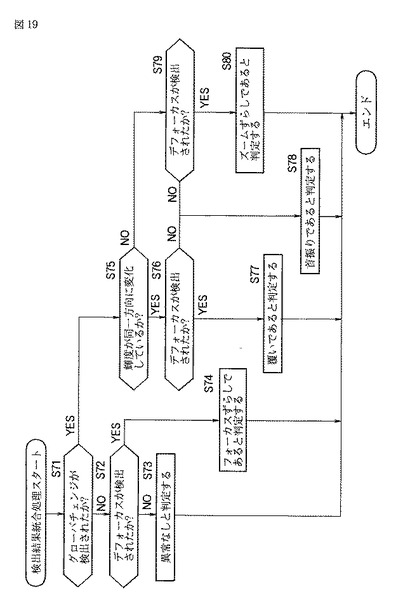
【図20】
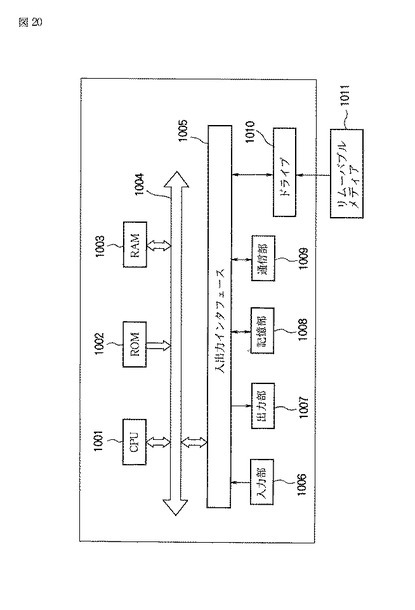
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【公開番号】特開2013−41400(P2013−41400A)
【公開日】平成25年2月28日(2013.2.28)
【国際特許分類】
【出願番号】特願2011−177569(P2011−177569)
【出願日】平成23年8月15日(2011.8.15)
【出願人】(000002185)ソニー株式会社 (34,172)
【Fターム(参考)】
【公開日】平成25年2月28日(2013.2.28)
【国際特許分類】
【出願日】平成23年8月15日(2011.8.15)
【出願人】(000002185)ソニー株式会社 (34,172)
【Fターム(参考)】
[ Back to top ]