
画像処理装置、画像処理方法、画像形成装置、プログラムおよび記録媒体
【課題】オブジェクトと周囲との差異が小さい場合でも、動的輪郭法のパラメータを画像の特徴に応じて設定することにより、高精度にオブジェクトの輪郭を抽出する。
【解決手段】特徴量算出部104は、輪郭設定部102により設定された輪郭内部の平均輝度と輝度の標準偏差を算出し、エネルギー関数計算部105は、エッジ成分の重み係数に、平均輝度と輝度の標準偏差を設定してエネルギー関数を計算する。
【解決手段】特徴量算出部104は、輪郭設定部102により設定された輪郭内部の平均輝度と輝度の標準偏差を算出し、エネルギー関数計算部105は、エッジ成分の重み係数に、平均輝度と輝度の標準偏差を設定してエネルギー関数を計算する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、画像中から特定領域の輪郭を抽出する画像処理装置、画像処理方法、画像形成装置、プログラムおよび記録媒体に関する。
【背景技術】
【0002】
画像中から物体(以下、オブジェクト)を抽出する方法として動的輪郭モデル(Active Contour Model:ACM)があり、このACMは、輪郭上の制御点により構成され、制御点間をスプライン法などで補間して実際の輪郭にする。
【0003】
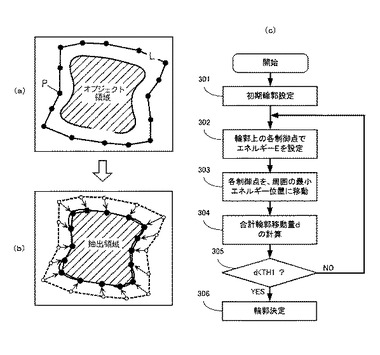
図5は、動的輪郭法を説明する図である。図5(a)に示すように、画像に含まれる特定のオブジェクトに対して変形可能な閉曲線Lを設定する。閉曲線Lは離散的に配置された制御点Pを連結して形成され、閉曲線Lのエネルギーは、閉曲線Lがオブジェクトの輪郭に一致したときに最小となるように定義され、図5(b)に示すように、閉曲線Lをそのエネルギーが最小となるように変形させることにより、オブジェクトの輪郭を抽出する。
【0004】
図5(c)は、動的輪郭法の処理フローチャートを示す。適当な方法により初期輪郭とその上の制御点群pt(s)=p0(s)を設定する(ステップ301)。ここで、tは時間を表す。初期輪郭はユーザーに設定させてもよい。制御点は、例えば、予め定められた間隔で等間隔に輪郭をサンプリングすることにより得られる。sは制御点番号を示す。次に、各制御点の近傍領域で、予め定められたエネルギー関数Eを計算する(ステップ302)。このエネルギー関数としては、例えば式(1)に示す関数を用いることができる。各制御点の近傍領域で最もEを小さくする位置p1(s)を見つけ、各制御点をp1(s)に移し(ステップ303)、p0(s)とp1(s)の間の合計移動量dを計算する(ステップ304)。dは例えば以下のような(数1)で計算することができる。
【0005】
【数1】

【0006】
dが予め定められた閾値TH1よりも大きいときは、収束していないと判定し(ステップ305でNo)、ステップ302に戻り、再度Eを用いた輪郭の移動を行う。上記した閾値処理で収束判定されるまで、上記した処理を繰り返すことにより輪郭を決定する(ステップ306)。
【0007】
ACMでは、上記したように、制御点を制御し、制御点の位置を決めるためのコスト関数がACM法の根幹であり、制御点とコスト関数は事前の実験などにより対象となる画像に適したものを構成することになるが、一般に制御点の初期位置(初期輪郭)は、ACMの計算収束までの時間と、最終的に得られる輪郭の精度の両方に大きな影響を与える。
【0008】
そこで、抽出するオブジェクトが画面中央に存在すると仮定し、画像周辺部や画像中央に中心を持つ円を初期輪郭として利用する方法(例えば、特許文献1を参照)や画像中のROI(Region Of Interest:注目領域)の候補を求め、その周囲に初期輪郭を構成する方法(例えば、特許文献2を参照)、ユーザーとのインタラクションにより初期輪郭を構成する方法(例えば、特許文献3を参照)などがある。
【発明の概要】
【発明が解決しようとする課題】
【0009】
しかし、上記した従来の動的輪郭法では、予め定められたエネルギー関数を用いて画像からオブジェクトを抽出するため、オブジェクトと周囲との差異が小さい場合、高精度にオブジェクトの輪郭を抽出することが難しい。例えば、オブジェクトの輪郭の平滑度が高く、エッジ成分が少ない場合には、収束するまでの計算に時間がかかり、輪郭抽出の精度も悪いという問題がある。
【0010】
本発明は、上記した課題に鑑みてなされたもので、
本発明の目的は、オブジェクトと周囲との差異が小さい場合でも、動的輪郭法のパラメータを画像の特徴に応じて設定することにより、高精度にオブジェクトの輪郭を抽出する画像処理装置、画像処理方法、画像形成装置、プログラムおよび記録媒体を提供することにある。
【課題を解決するための手段】
【0011】
本発明は、複数の制御点から構成される輪郭のエネルギー関数が最小化されるように、前記複数の制御点を移動して画像の輪郭を求める動的輪郭法を用いて、画像中から所定領域の輪郭を抽出する画像処理装置であって、前記所定領域に輪郭を設定する設定手段と、前記設定された輪郭の特徴量を算出する算出手段と、前記特徴量に応じた所定のパラメータを設定して前記エネルギー関数を計算する計算手段を備えたことを最も主要な特徴とする。
【発明の効果】
【0012】
本発明によれば、動的輪郭法のパラメータを、画像の特徴に応じて設定しているので、例えばガラス面上の水滴のような、周囲の領域との差異の小さい画像領域の輪郭を精度よく抽出することができる。
【図面の簡単な説明】
【0013】
【図1】本発明の実施例に係る画像処理装置の構成を示す。
【図2】本発明の実施例の処理フローチャートを示す。
【図3】輪郭と制御点の関係と、近傍領域の設定例を示す。
【図4】エネルギー関数を構成する各項目を説明する図である。
【図5】動的輪郭法を説明する図である。
【発明を実施するための形態】
【0014】
以下、発明の実施の形態について図面により詳細に説明する。本発明の基本的な考え方を説明する。動的輪郭法を用いて画像から特定のオブジェクトとして、例えば水滴領域を抽出するものとする。水滴領域は表面張力により、多くの場合、その表面がなだらかな曲線となり、その二次元射影である画像も、境界(輪郭)が滑らかであり、また水滴領域は閉領域であり、その内部の画素値の変動も少ない。従って、動的輪郭法の境界に関する条件が好適に当てはまる。ただし、画像中での水滴領域とそれ以外の領域との色成分などの差異が少ないので、前述したように、画像中のエッジなどに基づいた動的輪郭法では、良好な収束が得られない。これは、予め定められたエッジ抽出のための閾値が、ノイズレベルに近いことが問題である。
【0015】
これを解決するためには、動的輪郭法のエッジ抽出の閾値を、画像の特徴量に応じて動的に設定することが有効であることから、本発明では、画像から例えば水滴領域を抽出するために、動的輪郭法のパラメータを、画像の特徴量に応じて適応的に設定する。
【0016】
動的輪郭法の一つであるSnake(非特許文献1を参照)は以下のようなエネルギー関数を用いて、制御点vにより構成される輪郭を、画像中のオブジェクトの境界に沿う形で収束させる方法である。
【0017】
【数2】
【0018】
Snake(動的輪郭法)は、画像をエネルギー場とみなし、エネルギー関数の谷を見つけてくる方法である。本発明では、式(1)のように、最小化するべきエネルギーをEsnakeとする。Esnakeは、輪郭上に設定された制御点v(s)の持つエネルギーの総和(この場合は積分)で表される。ここで、sは制御点の番号である。Esnakeは更に詳細には、輪郭形状に依存する内部エネルギーEint、画像エネルギーEimage、予め定められた拘束条件によるペナルティ項Econからなる。Econは特別な拘束条件がある場合にのみ利用する項である。
【0019】
Eintは、更に式(2)のように位置の一次微分(vs(s))と二次微分(vss(s))の加重平均として表すことができる。輪郭の形状に関するエネルギーであればこれ以外の形式でもよい。
【0020】
Eimageは、更に式(3)のように画像中の線、エッジ、端点に関するエネルギーの加重和として表すことができる。これも画像エネルギーを表す式であれば、必ずしもこの形式でなくてもよい。
【0021】
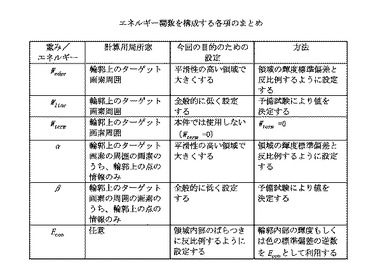
エネルギー関数中の重み付け係数Wが大きいほど、細かい変動に対して感度が強くなる。本発明では、目的とする平面状の水滴などの、平滑性の高い領域での輪郭抽出のためには、細かい変動に対して感度を強くする必要があるので、標準偏差が小さいときにWedgeを大きくする必要がある。標準偏差計算のための範囲として、抽出対象の外接矩形の場合は、境界部分の変化分も標準偏差計算に含まれるが、内接矩形の場合には境界部分の変化分が含まれないので、より正確になる。ただし画素数を多くとれない。
【0022】
線に対する感度であるWlineは、高解像度画像に起因するモスキートノイズやブロックノイズを拾わないようにするために、低く設定する。線分先端/点線の検出であるWtermは、本発明では関係しないため削除してもよい。
【0023】
境界の形状に関しては、1次項の係数αと2次項の係数βを決める必要がある。境界平滑性が高いことが予想されるので、滑らかな境界ほど1次項に対する感度を高めることが妥当である。つまり、αを大きくすることが妥当である。同じ理由によりコーナーに対する感度である2次項は小さくするのが妥当である。水滴の場合、輪郭形状は閉曲線で、かつ円形に近いことが多いので、sに対する依存性は考慮しない、つまり輪郭全体を線積分した方がよい。
【0024】
以上のように、エネルギー関数を構成する各項目をまとめると図4のようになる。このように、エネルギー関数を変更することで、平滑度の高い領域における周囲との差異の小さいオブジェクトの輪郭の抽出に適した、動的輪郭法による画像領域の分割が可能となる。
【実施例1】
【0025】
本発明の処理は、大きく分けると初期輪郭の設定と、その輪郭の修正という2段の処理からなる。この内、初期輪郭に関しては、最も単純にはユーザーによる指定に基づく方法がある。例えば、表示画面上でフリーハンドにより初期輪郭を設定する。より高度な方法としては、前述した画像中のROIを抽出してその周囲に初期輪郭を設定する方法がある。これはROIの抽出と人間の知覚のずれなどが問題となるが、自動化できる利点がある。この場合には例えばSURF(http://en.wikipedia.org/wiki/SURF)などを用いて画像中から特徴点を抽出し、その密度の高い領域をROIとして利用するなどの方法を用いることができる。
【0026】
次に、輪郭修正に関しては、輪郭を操作するための制御点の設定と、その制御点の移動という2つのステップに分割することができる。制御点は、最も単純には、予め定められたサンプリング間隔で輪郭をサンプリングすることで得られる。制御点の数を多くすれば輪郭の追従性は向上するが、計算量が多くなる。逆に制御点の数を減らせば、計算量が減少し輪郭の追従性は低下する。そのため輪郭の複雑さに応じて適応的に制御点を設定する方法も存在する。
【0027】
制御点が設定された後、画像に従って制御点を移動することで、輪郭を修正していく。この場合、前述したように、各輪郭点の周囲の領域で予め定められたエネルギー関数Eを計算し、各制御点をEの最も小さくなる位置に移動させる。このとき、各制御点の移動量を計算し、その総計をdとし、dが予め定められた閾値TH1よりも小さくなれば、輪郭抽出処理が収束したとみなし、処理を終了する。
【0028】
本発明の特徴は、上記した処理で用いられるエネルギー関数Eの設定の仕方にあり、エネルギー関数Eの設定に、その時点での輪郭cの内部領域の平均輝度μと輝度の標準偏差σを用いる。
【0029】
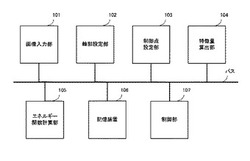
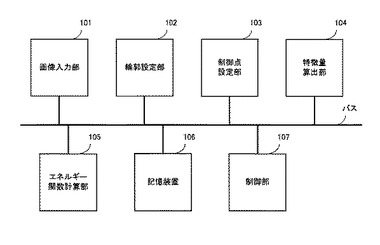
図1は、本発明の実施例に係る画像処理装置の構成を示す。本発明の画像処理装置は、画像を取得する画像入力部101、初期輪郭を設定する輪郭設定部102、初期輪郭に制御点を設定する制御点設定部103、設定された輪郭内部の特徴量を算出する特徴量算出部104、エネルギー関数Eを計算するエネルギー関数計算部105、HDDからなる記憶装置106、全体を制御する制御部107から構成されている。
【0030】
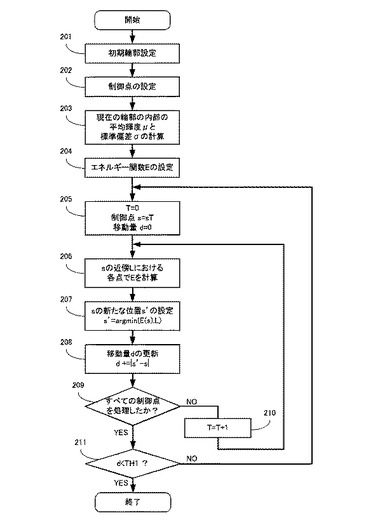
図2は、本発明の実施例の処理フローチャートを示す。画像入力部101は、記憶装置106に蓄積されている画像を取得し、輪郭設定部102は、取得した画像の特定領域(オブジェクト)に、前記した何れかの方法で初期輪郭を設定する(ステップ201)。なお、画像の取得は、スキャナやネットワークを介した他の機器(MFPなど)より取得してもよい。
【0031】
次に、制御点設定部103は、初期輪郭上に制御点を設定する(ステップ202)。これは、例えば予め定められた間隔によるサンプリングを行うことで設定することができる。このとき、制御点の個数をn、設定される制御点をs0〜snとする。
【0032】
次に、特徴量算出部104は、設定された初期輪郭を利用して、輪郭内部の画像領域の平均輝度μと輝度の標準偏差σを計算することにより輪郭内部の特徴量を算出する(ステップ203)。一般に、カラー画像の場合、RGBなどの情報として表されるが、ここでは簡単のためグレースケールに変換してから処理を行うものとする。グレースケールへの変換は、例えば以下のように行うことができる。ある画素q(i)の画素値を(q(i)r、q(i)g、q(i)b)とすると、グレーレベル値q(i)grayは以下のように表される。ここでiは画素を識別する番号とする。
【0033】
【数3】
【0034】
次に、このq(i)grayを用いて、輪郭cの内部領域の平均輝度μcと輝度の標準偏差σcを以下のように計算する。
【0035】
【数4】
ここでNcは、輪郭cの内部に含まれる画素数とする。
【0036】
これらを用いて、エネルギー関数Eが以下(数5)のようにエネルギー計算部105に設定される(ステップ204)。ここでsは、制御点の識別に用いられる番号であり、ν(s)はs番目の制御点の位置を表すものとする。
【0037】
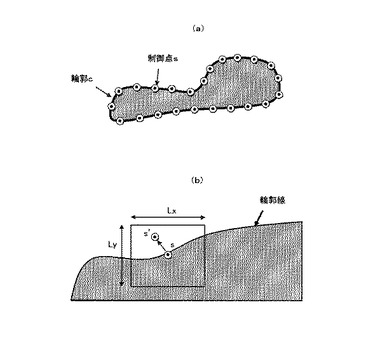
図3(a)は、輪郭cと制御点sの関係を示す。図3(a)では、23個の制御点sが輪郭c上に設定されている。
【0038】
【数5】
【0039】
ここで、κとλは、それぞれ平均輝度と輝度の標準偏差の逆数に対する重み付けのため
の係数である。これらの係数は入力画像の解像度と一画素当たりのビット数により正規化
されるものとする。
【0040】
Wedgeは、画像中のエッジに対する感度を示しているため、例えばλを大きく取ることで、輪郭内部の画素値のばらつきに対する感度を高く取り、Wedgeが大きくなることで、制御点のエネルギー関数Eを、エッジに対する感度が高くなるように設定することができる。また、特に明るい領域を抽出したい場合には、平均輝度に対する感度であるμを大きく取ることで、上記した例と同じように、制御点のエネルギー関数Eを、明るい領域の抽出に適した形にすることができる。
【0041】
式(1)、(3)、(5)におけるEintとEimagは、それぞれ輪郭c線上の全制御点位置、制御点位置ν(s)の近傍領域Lにおいて、エネルギー計算部105により計算される(ステップ205〜209)。
【0042】
図3(b)は、Eimag計算用の近傍領域Lの設定例を示す。エネルギー関数Eを構成する項の一つであるEimgは、画像中の特徴(上記した例では、線分、エッジ、終端点)を用いて計算される。この計算には各制御点に対する局所窓の定義が必要である。この例を図3(b)に示し、輪郭線(黒の実線)、制御点(輪郭線上の点)、その周囲の近傍領域Lを示す。
【0043】
近傍領域Lは、幅Lx、高さLyの矩形であり、これを局所窓としてEimgを計算する。近傍領域Lのサイズを大きくすることで、局所最適な解に落ち込む確率を低減できるが、Lに含まれる画素の数に比例して計算量が大きくなり、また収束までの時間も大きくなる傾向がある。逆にLのサイズを小さくすると、計算量は低減できるが、大域に最適な解が得られない確率が高くなる。これらの理由により、一般的に、Lのサイズは、対象画像を絞った上での予備実験により決定する。
【0044】
エネルギー計算部105は、ある制御点sの近傍領域Lの各点におけるエネルギーEを計算し(ステップ206)、その中で最小のエネルギーを持つ点をsの新たな位置s’とする(ステップ207)。関数argminを用いて表すと以下のようになる。
【0045】
【数6】
【0046】
制御点sの移動量dはsとs’の距離(|s’−s|)として計算する(ステップ208)。全ての制御点sについて処理していなければ(ステップ209でno)、ステップ210で次の制御点に処理を移し、以下、ステップ206以下の処理を行う。図3(a)の例では、23個の制御点について処理を行う。
【0047】
動的輪郭法の多くでは、輪郭全体の移動量dが一定以下になった場合に収束とみなす。本発明の方法でも、上記の制御点sの移動量の輪郭全体の総和を取り(数1)、dと所定の閾値TH1と比較し、dが閾値TH1未満のとき、収束していると判定し(ステップ211でyes)、dが閾値TH1よりも大きいときは、収束していないと判定し(ステップ211でno)、ステップ205に進み、新たな制御点s’(23個)について、前述したと同様にステップ206〜210の処理を繰り返す。
【0048】
上記した実施例では、その時点での輪郭の内部の画素を対象に平均輝度と輝度の標準偏差を計算し、特徴量を算出したが、この方法では、平滑に近い領域を対象とした場合、現在の輪郭が縮小する方向に制御点が移動するときには、多くの場合σが小さくなり(1/σが大きくなり)エッジに対する感度であるWedgeも増大し、画素値のわずかな差異にも反応しやすくなる。逆に、輪郭が拡大する方向に制御点が移動するときは、σは小さくなることも、大きくなることもありうる。そのため全体の傾向としては、輪郭は縮小し難い性質を持つため、初期輪郭の設定が適当であれば、正解から大きく外れることなく輪郭が収束する性質が得られる。
【実施例2】
【0049】
実施例2は、輪郭設定部102で設定された輪郭の外接矩形内部の平均輝度と輝度の標準偏差を特徴量として利用する実施例である。抽出対象の領域を含む可能性が高い外接矩形領域の画素情報を、特徴量算出部104により算出して用いることで、より正確な輪郭を抽出することができる。抽出対象の領域形状は種々あるが、本発明では、特に水滴などの円形に近い形状を持つ領域を対象としている。そのため、現在の輪郭の外接矩形と真の領域形状との差異は制御点位置の推移によらず、比較的安定していると考えられる。なお、その時点での輪郭の外接矩形内部の平均輝度と標準偏差を利用する方法として、Viola Jonesの提案したintegral image(非特許文献2を参照)を利用した計算方法を用いることで、大幅に計算量を低減できる利点もある。
【実施例3】
【0050】
実施例3は、画像の特徴量として、輪郭設定部102で設定された輪郭の曲率を利用する実施例である。Wedgeの設定に、周囲の輪郭の曲率を利用する場合を説明する。
【0051】
前述したように、式(2)で輪郭の形状変化に関する項が取り入れられている。これはエネルギー関数を直接操作するものであり、形状が滑らかな輪郭ほどエネルギーが小さくなるように設定されている。これに加え、前記したように、エッジ抽出のための感度の操作として、曲率が低いものほど感度を高くする(曲率が高いものほど感度が低くなるため、孤立点やコーナーなどに引きずられることが少なくなる)ことで、エネルギーEをノイズからの影響を受け難くすることができる。例えば、Wedgeを、以下の式(6)を用いることで実現できる。
【0052】
【数7】
ここで、Sは制御点個数、s0は開始点、vsは制御点sにおける輪郭の変化(d/ds)を示す。実際の計算では、vsは隣接する制御点の間の位置の差分として計算することができる。ここで、式(6)の右辺第3項は、輪郭全周の局所変化率の平均の逆数に係数φを掛けたものとなっている。この第3項により、輪郭形状の平均変化率をエッジ感度の係数に組み込むことができる。係数φは予備実験を行うことで決めるか、ユーザーに選択させてもよい。
【実施例4】
【0053】
実施例4は、画像の特徴量として、輪郭設定部102で設定された輪郭の長さを利用する実施例である。Wedgeの設定に、周囲の輪郭の長さを利用する場合を説明する。
【0054】
【数8】
式(7)の右辺第3項は、制御点sにおける変化率d/dsを用いて算出した全周長に係数ψをかけたものである。実際の計算では、境界を近似する充分な数の制御点がある場合には、右辺第3項は
【0055】
【数9】
とすることができる。制御点の数が少ない場合には、適当な補間法を用いて制御点を補間することで、上記した定義により輪郭の全周長を計算することができる。孤立点などの影響を受け難くするために、輪郭長が短くなったときに、エッジ感度Wedgeが小さくなるようになっている。係数ψは予備実験を行うことで決めるか、ユーザーに選択させてもよい。
【0056】
以上により抽出された特定領域の輪郭に対して、電子写真プロセスの画像形成装置により透明トナーを載せることにより、前述した水滴などの円形に近い形状の表面に、光沢を持たせた画像が表現される。
【0057】
本発明は、前述した実施例の機能を実現するソフトウエアのプログラムコードを記録した記憶媒体を、システムあるいは装置に供給し、そのシステムあるいは装置のコンピュータ(CPUやMPU)が記憶媒体に格納されたプログラムコードを読出し実行することによっても達成される。この場合、記憶媒体から読出されたプログラムコード自体が前述した実施例の機能を実現することになる。プログラムコードを供給するための記憶媒体としては、例えば、ハードディスク、光ディスク、光磁気ディスク、不揮発性のメモリカード、ROMなどを用いることができる。また、コンピュータが読出したプログラムコードを実行することにより、前述した実施例の機能が実現されるだけでなく、そのプログラムコードの指示に基づき、コンピュータ上で稼働しているOS(オペレーティングシステム)などが実際の処理の一部または全部を行い、その処理によって前述した実施例の機能が実現される場合も含まれる。さらに、記憶媒体から読出されたプログラムコードが、コンピュータに挿入された機能拡張ボードやコンピュータに接続された機能拡張ユニットに備わるメモリに書込まれた後、そのプログラムコードの指示に基づき、その機能拡張ボードや機能拡張ユニットに備わるCPUなどが実際の処理の一部または全部を行い、その処理によって前述した実施例の機能が実現される場合も含まれる。また、本発明の実施例の機能等を実現するためのプログラムは、ネットワークを介した通信によってサーバから提供されるものでも良い。
【符号の説明】
【0058】
101 画像入力部
102 輪郭設定部
103 制御点設定部
104 特徴量算出部
105 エネルギー関数計算部
106 記憶装置
107 制御部
【先行技術文献】
【特許文献】
【0059】
【特許文献1】特開2002−49922号公報
【特許文献2】特許第3070541号公報
【特許文献3】特開平9−327037号公報
【非特許文献】
【0060】
【非特許文献1】Active Contour Model:Michael Kass,Andrew Witkin and Demetri Terzopoulos(1987).“Snakes:active contour models”.International Journal of Computer Vision:259-268.
【非特許文献2】Integral Image:Viola,Paul;Jones,Michael(2002).“Robust Real-time Object Detection”.International Journal of Computer Vision
【技術分野】
【0001】
本発明は、画像中から特定領域の輪郭を抽出する画像処理装置、画像処理方法、画像形成装置、プログラムおよび記録媒体に関する。
【背景技術】
【0002】
画像中から物体(以下、オブジェクト)を抽出する方法として動的輪郭モデル(Active Contour Model:ACM)があり、このACMは、輪郭上の制御点により構成され、制御点間をスプライン法などで補間して実際の輪郭にする。
【0003】
図5は、動的輪郭法を説明する図である。図5(a)に示すように、画像に含まれる特定のオブジェクトに対して変形可能な閉曲線Lを設定する。閉曲線Lは離散的に配置された制御点Pを連結して形成され、閉曲線Lのエネルギーは、閉曲線Lがオブジェクトの輪郭に一致したときに最小となるように定義され、図5(b)に示すように、閉曲線Lをそのエネルギーが最小となるように変形させることにより、オブジェクトの輪郭を抽出する。
【0004】
図5(c)は、動的輪郭法の処理フローチャートを示す。適当な方法により初期輪郭とその上の制御点群pt(s)=p0(s)を設定する(ステップ301)。ここで、tは時間を表す。初期輪郭はユーザーに設定させてもよい。制御点は、例えば、予め定められた間隔で等間隔に輪郭をサンプリングすることにより得られる。sは制御点番号を示す。次に、各制御点の近傍領域で、予め定められたエネルギー関数Eを計算する(ステップ302)。このエネルギー関数としては、例えば式(1)に示す関数を用いることができる。各制御点の近傍領域で最もEを小さくする位置p1(s)を見つけ、各制御点をp1(s)に移し(ステップ303)、p0(s)とp1(s)の間の合計移動量dを計算する(ステップ304)。dは例えば以下のような(数1)で計算することができる。
【0005】
【数1】
【0006】
dが予め定められた閾値TH1よりも大きいときは、収束していないと判定し(ステップ305でNo)、ステップ302に戻り、再度Eを用いた輪郭の移動を行う。上記した閾値処理で収束判定されるまで、上記した処理を繰り返すことにより輪郭を決定する(ステップ306)。
【0007】
ACMでは、上記したように、制御点を制御し、制御点の位置を決めるためのコスト関数がACM法の根幹であり、制御点とコスト関数は事前の実験などにより対象となる画像に適したものを構成することになるが、一般に制御点の初期位置(初期輪郭)は、ACMの計算収束までの時間と、最終的に得られる輪郭の精度の両方に大きな影響を与える。
【0008】
そこで、抽出するオブジェクトが画面中央に存在すると仮定し、画像周辺部や画像中央に中心を持つ円を初期輪郭として利用する方法(例えば、特許文献1を参照)や画像中のROI(Region Of Interest:注目領域)の候補を求め、その周囲に初期輪郭を構成する方法(例えば、特許文献2を参照)、ユーザーとのインタラクションにより初期輪郭を構成する方法(例えば、特許文献3を参照)などがある。
【発明の概要】
【発明が解決しようとする課題】
【0009】
しかし、上記した従来の動的輪郭法では、予め定められたエネルギー関数を用いて画像からオブジェクトを抽出するため、オブジェクトと周囲との差異が小さい場合、高精度にオブジェクトの輪郭を抽出することが難しい。例えば、オブジェクトの輪郭の平滑度が高く、エッジ成分が少ない場合には、収束するまでの計算に時間がかかり、輪郭抽出の精度も悪いという問題がある。
【0010】
本発明は、上記した課題に鑑みてなされたもので、
本発明の目的は、オブジェクトと周囲との差異が小さい場合でも、動的輪郭法のパラメータを画像の特徴に応じて設定することにより、高精度にオブジェクトの輪郭を抽出する画像処理装置、画像処理方法、画像形成装置、プログラムおよび記録媒体を提供することにある。
【課題を解決するための手段】
【0011】
本発明は、複数の制御点から構成される輪郭のエネルギー関数が最小化されるように、前記複数の制御点を移動して画像の輪郭を求める動的輪郭法を用いて、画像中から所定領域の輪郭を抽出する画像処理装置であって、前記所定領域に輪郭を設定する設定手段と、前記設定された輪郭の特徴量を算出する算出手段と、前記特徴量に応じた所定のパラメータを設定して前記エネルギー関数を計算する計算手段を備えたことを最も主要な特徴とする。
【発明の効果】
【0012】
本発明によれば、動的輪郭法のパラメータを、画像の特徴に応じて設定しているので、例えばガラス面上の水滴のような、周囲の領域との差異の小さい画像領域の輪郭を精度よく抽出することができる。
【図面の簡単な説明】
【0013】
【図1】本発明の実施例に係る画像処理装置の構成を示す。
【図2】本発明の実施例の処理フローチャートを示す。
【図3】輪郭と制御点の関係と、近傍領域の設定例を示す。
【図4】エネルギー関数を構成する各項目を説明する図である。
【図5】動的輪郭法を説明する図である。
【発明を実施するための形態】
【0014】
以下、発明の実施の形態について図面により詳細に説明する。本発明の基本的な考え方を説明する。動的輪郭法を用いて画像から特定のオブジェクトとして、例えば水滴領域を抽出するものとする。水滴領域は表面張力により、多くの場合、その表面がなだらかな曲線となり、その二次元射影である画像も、境界(輪郭)が滑らかであり、また水滴領域は閉領域であり、その内部の画素値の変動も少ない。従って、動的輪郭法の境界に関する条件が好適に当てはまる。ただし、画像中での水滴領域とそれ以外の領域との色成分などの差異が少ないので、前述したように、画像中のエッジなどに基づいた動的輪郭法では、良好な収束が得られない。これは、予め定められたエッジ抽出のための閾値が、ノイズレベルに近いことが問題である。
【0015】
これを解決するためには、動的輪郭法のエッジ抽出の閾値を、画像の特徴量に応じて動的に設定することが有効であることから、本発明では、画像から例えば水滴領域を抽出するために、動的輪郭法のパラメータを、画像の特徴量に応じて適応的に設定する。
【0016】
動的輪郭法の一つであるSnake(非特許文献1を参照)は以下のようなエネルギー関数を用いて、制御点vにより構成される輪郭を、画像中のオブジェクトの境界に沿う形で収束させる方法である。
【0017】
【数2】
【0018】
Snake(動的輪郭法)は、画像をエネルギー場とみなし、エネルギー関数の谷を見つけてくる方法である。本発明では、式(1)のように、最小化するべきエネルギーをEsnakeとする。Esnakeは、輪郭上に設定された制御点v(s)の持つエネルギーの総和(この場合は積分)で表される。ここで、sは制御点の番号である。Esnakeは更に詳細には、輪郭形状に依存する内部エネルギーEint、画像エネルギーEimage、予め定められた拘束条件によるペナルティ項Econからなる。Econは特別な拘束条件がある場合にのみ利用する項である。
【0019】
Eintは、更に式(2)のように位置の一次微分(vs(s))と二次微分(vss(s))の加重平均として表すことができる。輪郭の形状に関するエネルギーであればこれ以外の形式でもよい。
【0020】
Eimageは、更に式(3)のように画像中の線、エッジ、端点に関するエネルギーの加重和として表すことができる。これも画像エネルギーを表す式であれば、必ずしもこの形式でなくてもよい。
【0021】
エネルギー関数中の重み付け係数Wが大きいほど、細かい変動に対して感度が強くなる。本発明では、目的とする平面状の水滴などの、平滑性の高い領域での輪郭抽出のためには、細かい変動に対して感度を強くする必要があるので、標準偏差が小さいときにWedgeを大きくする必要がある。標準偏差計算のための範囲として、抽出対象の外接矩形の場合は、境界部分の変化分も標準偏差計算に含まれるが、内接矩形の場合には境界部分の変化分が含まれないので、より正確になる。ただし画素数を多くとれない。
【0022】
線に対する感度であるWlineは、高解像度画像に起因するモスキートノイズやブロックノイズを拾わないようにするために、低く設定する。線分先端/点線の検出であるWtermは、本発明では関係しないため削除してもよい。
【0023】
境界の形状に関しては、1次項の係数αと2次項の係数βを決める必要がある。境界平滑性が高いことが予想されるので、滑らかな境界ほど1次項に対する感度を高めることが妥当である。つまり、αを大きくすることが妥当である。同じ理由によりコーナーに対する感度である2次項は小さくするのが妥当である。水滴の場合、輪郭形状は閉曲線で、かつ円形に近いことが多いので、sに対する依存性は考慮しない、つまり輪郭全体を線積分した方がよい。
【0024】
以上のように、エネルギー関数を構成する各項目をまとめると図4のようになる。このように、エネルギー関数を変更することで、平滑度の高い領域における周囲との差異の小さいオブジェクトの輪郭の抽出に適した、動的輪郭法による画像領域の分割が可能となる。
【実施例1】
【0025】
本発明の処理は、大きく分けると初期輪郭の設定と、その輪郭の修正という2段の処理からなる。この内、初期輪郭に関しては、最も単純にはユーザーによる指定に基づく方法がある。例えば、表示画面上でフリーハンドにより初期輪郭を設定する。より高度な方法としては、前述した画像中のROIを抽出してその周囲に初期輪郭を設定する方法がある。これはROIの抽出と人間の知覚のずれなどが問題となるが、自動化できる利点がある。この場合には例えばSURF(http://en.wikipedia.org/wiki/SURF)などを用いて画像中から特徴点を抽出し、その密度の高い領域をROIとして利用するなどの方法を用いることができる。
【0026】
次に、輪郭修正に関しては、輪郭を操作するための制御点の設定と、その制御点の移動という2つのステップに分割することができる。制御点は、最も単純には、予め定められたサンプリング間隔で輪郭をサンプリングすることで得られる。制御点の数を多くすれば輪郭の追従性は向上するが、計算量が多くなる。逆に制御点の数を減らせば、計算量が減少し輪郭の追従性は低下する。そのため輪郭の複雑さに応じて適応的に制御点を設定する方法も存在する。
【0027】
制御点が設定された後、画像に従って制御点を移動することで、輪郭を修正していく。この場合、前述したように、各輪郭点の周囲の領域で予め定められたエネルギー関数Eを計算し、各制御点をEの最も小さくなる位置に移動させる。このとき、各制御点の移動量を計算し、その総計をdとし、dが予め定められた閾値TH1よりも小さくなれば、輪郭抽出処理が収束したとみなし、処理を終了する。
【0028】
本発明の特徴は、上記した処理で用いられるエネルギー関数Eの設定の仕方にあり、エネルギー関数Eの設定に、その時点での輪郭cの内部領域の平均輝度μと輝度の標準偏差σを用いる。
【0029】
図1は、本発明の実施例に係る画像処理装置の構成を示す。本発明の画像処理装置は、画像を取得する画像入力部101、初期輪郭を設定する輪郭設定部102、初期輪郭に制御点を設定する制御点設定部103、設定された輪郭内部の特徴量を算出する特徴量算出部104、エネルギー関数Eを計算するエネルギー関数計算部105、HDDからなる記憶装置106、全体を制御する制御部107から構成されている。
【0030】
図2は、本発明の実施例の処理フローチャートを示す。画像入力部101は、記憶装置106に蓄積されている画像を取得し、輪郭設定部102は、取得した画像の特定領域(オブジェクト)に、前記した何れかの方法で初期輪郭を設定する(ステップ201)。なお、画像の取得は、スキャナやネットワークを介した他の機器(MFPなど)より取得してもよい。
【0031】
次に、制御点設定部103は、初期輪郭上に制御点を設定する(ステップ202)。これは、例えば予め定められた間隔によるサンプリングを行うことで設定することができる。このとき、制御点の個数をn、設定される制御点をs0〜snとする。
【0032】
次に、特徴量算出部104は、設定された初期輪郭を利用して、輪郭内部の画像領域の平均輝度μと輝度の標準偏差σを計算することにより輪郭内部の特徴量を算出する(ステップ203)。一般に、カラー画像の場合、RGBなどの情報として表されるが、ここでは簡単のためグレースケールに変換してから処理を行うものとする。グレースケールへの変換は、例えば以下のように行うことができる。ある画素q(i)の画素値を(q(i)r、q(i)g、q(i)b)とすると、グレーレベル値q(i)grayは以下のように表される。ここでiは画素を識別する番号とする。
【0033】
【数3】
【0034】
次に、このq(i)grayを用いて、輪郭cの内部領域の平均輝度μcと輝度の標準偏差σcを以下のように計算する。
【0035】
【数4】
ここでNcは、輪郭cの内部に含まれる画素数とする。
【0036】
これらを用いて、エネルギー関数Eが以下(数5)のようにエネルギー計算部105に設定される(ステップ204)。ここでsは、制御点の識別に用いられる番号であり、ν(s)はs番目の制御点の位置を表すものとする。
【0037】
図3(a)は、輪郭cと制御点sの関係を示す。図3(a)では、23個の制御点sが輪郭c上に設定されている。
【0038】
【数5】
【0039】
ここで、κとλは、それぞれ平均輝度と輝度の標準偏差の逆数に対する重み付けのため
の係数である。これらの係数は入力画像の解像度と一画素当たりのビット数により正規化
されるものとする。
【0040】
Wedgeは、画像中のエッジに対する感度を示しているため、例えばλを大きく取ることで、輪郭内部の画素値のばらつきに対する感度を高く取り、Wedgeが大きくなることで、制御点のエネルギー関数Eを、エッジに対する感度が高くなるように設定することができる。また、特に明るい領域を抽出したい場合には、平均輝度に対する感度であるμを大きく取ることで、上記した例と同じように、制御点のエネルギー関数Eを、明るい領域の抽出に適した形にすることができる。
【0041】
式(1)、(3)、(5)におけるEintとEimagは、それぞれ輪郭c線上の全制御点位置、制御点位置ν(s)の近傍領域Lにおいて、エネルギー計算部105により計算される(ステップ205〜209)。
【0042】
図3(b)は、Eimag計算用の近傍領域Lの設定例を示す。エネルギー関数Eを構成する項の一つであるEimgは、画像中の特徴(上記した例では、線分、エッジ、終端点)を用いて計算される。この計算には各制御点に対する局所窓の定義が必要である。この例を図3(b)に示し、輪郭線(黒の実線)、制御点(輪郭線上の点)、その周囲の近傍領域Lを示す。
【0043】
近傍領域Lは、幅Lx、高さLyの矩形であり、これを局所窓としてEimgを計算する。近傍領域Lのサイズを大きくすることで、局所最適な解に落ち込む確率を低減できるが、Lに含まれる画素の数に比例して計算量が大きくなり、また収束までの時間も大きくなる傾向がある。逆にLのサイズを小さくすると、計算量は低減できるが、大域に最適な解が得られない確率が高くなる。これらの理由により、一般的に、Lのサイズは、対象画像を絞った上での予備実験により決定する。
【0044】
エネルギー計算部105は、ある制御点sの近傍領域Lの各点におけるエネルギーEを計算し(ステップ206)、その中で最小のエネルギーを持つ点をsの新たな位置s’とする(ステップ207)。関数argminを用いて表すと以下のようになる。
【0045】
【数6】
【0046】
制御点sの移動量dはsとs’の距離(|s’−s|)として計算する(ステップ208)。全ての制御点sについて処理していなければ(ステップ209でno)、ステップ210で次の制御点に処理を移し、以下、ステップ206以下の処理を行う。図3(a)の例では、23個の制御点について処理を行う。
【0047】
動的輪郭法の多くでは、輪郭全体の移動量dが一定以下になった場合に収束とみなす。本発明の方法でも、上記の制御点sの移動量の輪郭全体の総和を取り(数1)、dと所定の閾値TH1と比較し、dが閾値TH1未満のとき、収束していると判定し(ステップ211でyes)、dが閾値TH1よりも大きいときは、収束していないと判定し(ステップ211でno)、ステップ205に進み、新たな制御点s’(23個)について、前述したと同様にステップ206〜210の処理を繰り返す。
【0048】
上記した実施例では、その時点での輪郭の内部の画素を対象に平均輝度と輝度の標準偏差を計算し、特徴量を算出したが、この方法では、平滑に近い領域を対象とした場合、現在の輪郭が縮小する方向に制御点が移動するときには、多くの場合σが小さくなり(1/σが大きくなり)エッジに対する感度であるWedgeも増大し、画素値のわずかな差異にも反応しやすくなる。逆に、輪郭が拡大する方向に制御点が移動するときは、σは小さくなることも、大きくなることもありうる。そのため全体の傾向としては、輪郭は縮小し難い性質を持つため、初期輪郭の設定が適当であれば、正解から大きく外れることなく輪郭が収束する性質が得られる。
【実施例2】
【0049】
実施例2は、輪郭設定部102で設定された輪郭の外接矩形内部の平均輝度と輝度の標準偏差を特徴量として利用する実施例である。抽出対象の領域を含む可能性が高い外接矩形領域の画素情報を、特徴量算出部104により算出して用いることで、より正確な輪郭を抽出することができる。抽出対象の領域形状は種々あるが、本発明では、特に水滴などの円形に近い形状を持つ領域を対象としている。そのため、現在の輪郭の外接矩形と真の領域形状との差異は制御点位置の推移によらず、比較的安定していると考えられる。なお、その時点での輪郭の外接矩形内部の平均輝度と標準偏差を利用する方法として、Viola Jonesの提案したintegral image(非特許文献2を参照)を利用した計算方法を用いることで、大幅に計算量を低減できる利点もある。
【実施例3】
【0050】
実施例3は、画像の特徴量として、輪郭設定部102で設定された輪郭の曲率を利用する実施例である。Wedgeの設定に、周囲の輪郭の曲率を利用する場合を説明する。
【0051】
前述したように、式(2)で輪郭の形状変化に関する項が取り入れられている。これはエネルギー関数を直接操作するものであり、形状が滑らかな輪郭ほどエネルギーが小さくなるように設定されている。これに加え、前記したように、エッジ抽出のための感度の操作として、曲率が低いものほど感度を高くする(曲率が高いものほど感度が低くなるため、孤立点やコーナーなどに引きずられることが少なくなる)ことで、エネルギーEをノイズからの影響を受け難くすることができる。例えば、Wedgeを、以下の式(6)を用いることで実現できる。
【0052】
【数7】
ここで、Sは制御点個数、s0は開始点、vsは制御点sにおける輪郭の変化(d/ds)を示す。実際の計算では、vsは隣接する制御点の間の位置の差分として計算することができる。ここで、式(6)の右辺第3項は、輪郭全周の局所変化率の平均の逆数に係数φを掛けたものとなっている。この第3項により、輪郭形状の平均変化率をエッジ感度の係数に組み込むことができる。係数φは予備実験を行うことで決めるか、ユーザーに選択させてもよい。
【実施例4】
【0053】
実施例4は、画像の特徴量として、輪郭設定部102で設定された輪郭の長さを利用する実施例である。Wedgeの設定に、周囲の輪郭の長さを利用する場合を説明する。
【0054】
【数8】
式(7)の右辺第3項は、制御点sにおける変化率d/dsを用いて算出した全周長に係数ψをかけたものである。実際の計算では、境界を近似する充分な数の制御点がある場合には、右辺第3項は
【0055】
【数9】
とすることができる。制御点の数が少ない場合には、適当な補間法を用いて制御点を補間することで、上記した定義により輪郭の全周長を計算することができる。孤立点などの影響を受け難くするために、輪郭長が短くなったときに、エッジ感度Wedgeが小さくなるようになっている。係数ψは予備実験を行うことで決めるか、ユーザーに選択させてもよい。
【0056】
以上により抽出された特定領域の輪郭に対して、電子写真プロセスの画像形成装置により透明トナーを載せることにより、前述した水滴などの円形に近い形状の表面に、光沢を持たせた画像が表現される。
【0057】
本発明は、前述した実施例の機能を実現するソフトウエアのプログラムコードを記録した記憶媒体を、システムあるいは装置に供給し、そのシステムあるいは装置のコンピュータ(CPUやMPU)が記憶媒体に格納されたプログラムコードを読出し実行することによっても達成される。この場合、記憶媒体から読出されたプログラムコード自体が前述した実施例の機能を実現することになる。プログラムコードを供給するための記憶媒体としては、例えば、ハードディスク、光ディスク、光磁気ディスク、不揮発性のメモリカード、ROMなどを用いることができる。また、コンピュータが読出したプログラムコードを実行することにより、前述した実施例の機能が実現されるだけでなく、そのプログラムコードの指示に基づき、コンピュータ上で稼働しているOS(オペレーティングシステム)などが実際の処理の一部または全部を行い、その処理によって前述した実施例の機能が実現される場合も含まれる。さらに、記憶媒体から読出されたプログラムコードが、コンピュータに挿入された機能拡張ボードやコンピュータに接続された機能拡張ユニットに備わるメモリに書込まれた後、そのプログラムコードの指示に基づき、その機能拡張ボードや機能拡張ユニットに備わるCPUなどが実際の処理の一部または全部を行い、その処理によって前述した実施例の機能が実現される場合も含まれる。また、本発明の実施例の機能等を実現するためのプログラムは、ネットワークを介した通信によってサーバから提供されるものでも良い。
【符号の説明】
【0058】
101 画像入力部
102 輪郭設定部
103 制御点設定部
104 特徴量算出部
105 エネルギー関数計算部
106 記憶装置
107 制御部
【先行技術文献】
【特許文献】
【0059】
【特許文献1】特開2002−49922号公報
【特許文献2】特許第3070541号公報
【特許文献3】特開平9−327037号公報
【非特許文献】
【0060】
【非特許文献1】Active Contour Model:Michael Kass,Andrew Witkin and Demetri Terzopoulos(1987).“Snakes:active contour models”.International Journal of Computer Vision:259-268.
【非特許文献2】Integral Image:Viola,Paul;Jones,Michael(2002).“Robust Real-time Object Detection”.International Journal of Computer Vision
【特許請求の範囲】
【請求項1】
複数の制御点から構成される輪郭のエネルギー関数が最小化されるように、前記複数の制御点を移動して画像の輪郭を求める動的輪郭法を用いて、画像中から所定領域の輪郭を抽出する画像処理装置であって、前記所定領域に輪郭を設定する設定手段と、前記設定された輪郭の特徴量を算出する算出手段と、前記特徴量に応じた所定のパラメータを設定して前記エネルギー関数を計算する計算手段を備えたことを特徴とする画像処理装置。
【請求項2】
前記特徴量に応じた所定のパラメータは、前記エネルギー関数の画像エッジ成分を重み付けるパラメータであることを特徴とする請求項1記載の画像処理装置。
【請求項3】
前記特徴量は、前記設定された輪郭内部の平均輝度と輝度の標準偏差であることを特徴とする請求項1または2記載の画像処理装置。
【請求項4】
前記特徴量は、前記設定された輪郭の外接矩形内部の平均輝度と輝度の標準偏差であることを特徴とする請求項1または2記載の画像処理装置。
【請求項5】
前記特徴量は、前記設定された輪郭の曲率であることを特徴とする請求項1または2記載の画像処理装置。
【請求項6】
前記特徴量は、前記設定された輪郭の長さであることを特徴とする請求項1または2記載の画像処理装置。
【請求項7】
前記所定領域の輪郭は、平滑度が高い輪郭を含むことを特徴とする請求項1記載の画像処理装置。
【請求項8】
前記平滑度が高い輪郭は、周囲の領域との差異の小さい画像領域の輪郭であることを特徴とする請求項7記載の画像処理装置。
【請求項9】
複数の制御点から構成される輪郭のエネルギー関数が最小化されるように、前記複数の制御点を移動して画像の輪郭を求める動的輪郭法を用いて、画像中から所定領域の輪郭を抽出する画像処理方法であって、前記所定領域に輪郭を設定する設定工程と、前記設定された輪郭の特徴量を算出する算出工程と、前記特徴量に応じた所定のパラメータを設定して前記エネルギー関数を計算する計算工程を備えたことを特徴とする画像処理方法。
【請求項10】
請求項1乃至8のいずれか1項に記載の画像処理装置により出力される所定領域の輪郭に、透明トナーを載せて画像を形成する形成手段を備えたことを特徴とする画像形成装置。
【請求項11】
請求項9記載の画像処理方法をコンピュータに実現させるためのプログラム。
【請求項12】
請求項9記載の画像処理方法をコンピュータに実現させるためのプログラムを記録したコンピュータ読み取り可能な記録媒体。
【請求項1】
複数の制御点から構成される輪郭のエネルギー関数が最小化されるように、前記複数の制御点を移動して画像の輪郭を求める動的輪郭法を用いて、画像中から所定領域の輪郭を抽出する画像処理装置であって、前記所定領域に輪郭を設定する設定手段と、前記設定された輪郭の特徴量を算出する算出手段と、前記特徴量に応じた所定のパラメータを設定して前記エネルギー関数を計算する計算手段を備えたことを特徴とする画像処理装置。
【請求項2】
前記特徴量に応じた所定のパラメータは、前記エネルギー関数の画像エッジ成分を重み付けるパラメータであることを特徴とする請求項1記載の画像処理装置。
【請求項3】
前記特徴量は、前記設定された輪郭内部の平均輝度と輝度の標準偏差であることを特徴とする請求項1または2記載の画像処理装置。
【請求項4】
前記特徴量は、前記設定された輪郭の外接矩形内部の平均輝度と輝度の標準偏差であることを特徴とする請求項1または2記載の画像処理装置。
【請求項5】
前記特徴量は、前記設定された輪郭の曲率であることを特徴とする請求項1または2記載の画像処理装置。
【請求項6】
前記特徴量は、前記設定された輪郭の長さであることを特徴とする請求項1または2記載の画像処理装置。
【請求項7】
前記所定領域の輪郭は、平滑度が高い輪郭を含むことを特徴とする請求項1記載の画像処理装置。
【請求項8】
前記平滑度が高い輪郭は、周囲の領域との差異の小さい画像領域の輪郭であることを特徴とする請求項7記載の画像処理装置。
【請求項9】
複数の制御点から構成される輪郭のエネルギー関数が最小化されるように、前記複数の制御点を移動して画像の輪郭を求める動的輪郭法を用いて、画像中から所定領域の輪郭を抽出する画像処理方法であって、前記所定領域に輪郭を設定する設定工程と、前記設定された輪郭の特徴量を算出する算出工程と、前記特徴量に応じた所定のパラメータを設定して前記エネルギー関数を計算する計算工程を備えたことを特徴とする画像処理方法。
【請求項10】
請求項1乃至8のいずれか1項に記載の画像処理装置により出力される所定領域の輪郭に、透明トナーを載せて画像を形成する形成手段を備えたことを特徴とする画像形成装置。
【請求項11】
請求項9記載の画像処理方法をコンピュータに実現させるためのプログラム。
【請求項12】
請求項9記載の画像処理方法をコンピュータに実現させるためのプログラムを記録したコンピュータ読み取り可能な記録媒体。
【図1】

【図2】
【図3】
【図4】
【図5】
【図2】
【図3】
【図4】
【図5】
【公開番号】特開2012−185774(P2012−185774A)
【公開日】平成24年9月27日(2012.9.27)
【国際特許分類】
【出願番号】特願2011−50101(P2011−50101)
【出願日】平成23年3月8日(2011.3.8)
【出願人】(000006747)株式会社リコー (37,907)
【Fターム(参考)】
【公開日】平成24年9月27日(2012.9.27)
【国際特許分類】
【出願日】平成23年3月8日(2011.3.8)
【出願人】(000006747)株式会社リコー (37,907)
【Fターム(参考)】
[ Back to top ]