
画像処理装置、画像処理方法および画像処理プログラム
【課題】画像内の物体を安定して追尾すること。
【解決手段】画像処理装置100は、追尾対象となる物体の複数の部分テンプレートと、テンプレート画像とを比較して、領域毎の相関値を算出する。画像処理装置100は、相関値に基づいて、部分テンプレートに類似する画像領域を仮説領域として抽出する。画像処理装置100は、複数の仮説領域を重複しないように組み合わせた全体仮説を生成し、相関値や誤差を基にして、全体仮説の評価値を算出する。画像処理装置100は、評価値を基にして、複数の全体仮説から最適な全体仮説を判定する。
【解決手段】画像処理装置100は、追尾対象となる物体の複数の部分テンプレートと、テンプレート画像とを比較して、領域毎の相関値を算出する。画像処理装置100は、相関値に基づいて、部分テンプレートに類似する画像領域を仮説領域として抽出する。画像処理装置100は、複数の仮説領域を重複しないように組み合わせた全体仮説を生成し、相関値や誤差を基にして、全体仮説の評価値を算出する。画像処理装置100は、評価値を基にして、複数の全体仮説から最適な全体仮説を判定する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、画像処理装置等に関する。
【背景技術】
【0002】
カメラが撮影した画像を解析し、画像内の所定の物体を追尾する画像処理装置が存在する。例えば、従来の画像処理装置は、追尾対象となる物体の特徴的な部分の画像を部分テンプレートとして用いる。この特徴的な部分は、例えば、物体の端に対応する。画像処理装置は、部分テンプレートと追尾対象の画像との相関演算を行い、相関値が最大となる領域を部分テンプレートに該当する領域と判定する。画像処理装置は、連続する画像に対して、部分テンプレートに該当する領域を順次判定し、判定結果に基づいて、物体の移動量を推定する。
【0003】
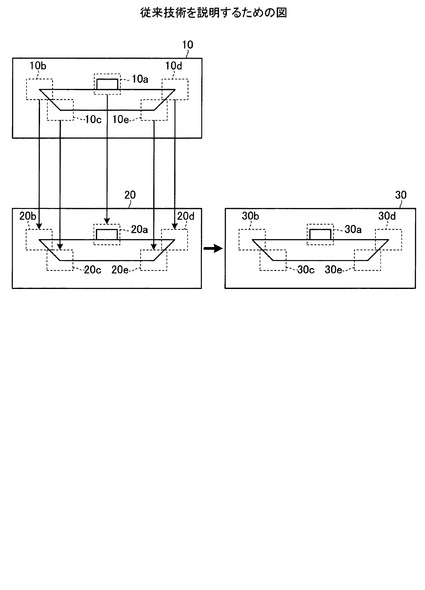
図14は、従来技術を説明するための図である。図14の10は、物体のテンプレート画像である。ここでは、追尾する物体を船とする。テンプレート画像10には、部分テンプレート10a〜10eが含まれる。例えば、部分テンプレート10aは、船の船橋部分の画像である。部分テンプレート10b、10cは、船首部分の画像である。部分テンプレート10d、10eは、船尾部分の画像である。
【0004】
図14の20は、追尾対象の画像である。画像処理装置は、部分テンプレート10a〜10eと画像20とを基にして相関演算を行い、相関値が最大となる領域を判定する。図14に示す例では、部分テンプレート10a〜10eとの相関値が最大となる領域は、20a〜20eとなる。
【0005】
画像処理装置は、画像20の次のフレームとなる画像30に対しても、部分テンプレート10a〜10eと画像20とを基にして相関演算を行い、相関値が最大となる領域を判定する。図14に示す例では、部分テンプレート10a〜10eとの相関値が最大となる位置は、30a〜30eとなる。
【0006】
画像20内の領域20a〜20eは、画像30内の領域30a〜30eにそれぞれ対応している。このため、例えば、画像処理装置は、領域20a〜20eから領域30a〜30eの各移動量を統合することで、船の移動量を推定し、船を追尾する。
【先行技術文献】
【特許文献】
【0007】
【特許文献1】特開2001−34756号公報
【発明の概要】
【発明が解決しようとする課題】
【0008】
しかしながら、上述した従来技術では、画像内の物体を安定して追尾することができないという問題があった。
【0009】
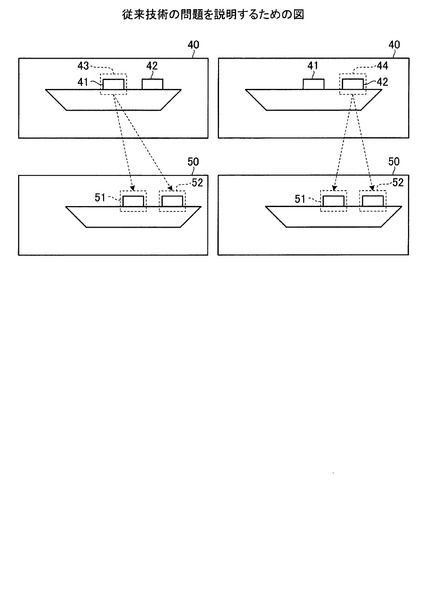
図15は、従来技術の問題を説明するための図である。図15に示すように、追尾対象となる物体に類似する部分が複数存在し、この類似の部分を部分テンプレートとした場合に、画像内の物体を安定して追尾できなくなる。図15では、画像40の船に類似の部分41、42が存在している。このため、画像処理装置が、領域43を部分テンプレートとすると、追尾対象の画像50内の領域51、52において、相関値が高くなり、どちらが部分テンプレート43に対応する領域なのかを判定できない。同様に、画像処理装置が、領域44を部分テンプレートとすると、画像50内の領域51、52において、相関値が高くなり、どちらが部分テンプレートに対応する領域なのかを判定できない。
【0010】
開示の技術は、上記に鑑みてなされたものであって、画像内の物体を安定して追尾することができる画像処理装置、画像処理方法および画像処理プログラムを提供することを目的とする。
【課題を解決するための手段】
【0011】
開示の画像処理装置は、相関値算出部と、仮説領域抽出部と、全体仮説生成部と、全体仮説評価部を有する。相関値算出部は、追尾対象となる物体の各局所部分の画像を含む複数の部分テンプレートと、カメラが撮影したカメラ画像とを比較して、部分テンプレートとカメラ画像内の各領域との相関値を算出する。仮説領域抽出部は、相関値に基づいて、前記部分テンプレートに類似する前記カメラ画像内の領域を仮説領域として複数抽出する。全体仮説抽出部は、複数の仮説領域を重複しないように組み合わせた複数の全体仮説情報を生成する。全体仮説評価部は、複数の全体仮説情報について、それぞれの評価値を算出し、各評価値に基づいて複数の全体仮説情報から単一の全体仮説情報を選択する。
【発明の効果】
【0012】
開示の画像処理装置によれば、画像内の物体を安定して追尾することができるという効果を奏する。
【図面の簡単な説明】
【0013】
【図1】図1は、本実施例にかかる画像処理装置の構成を示す図である。
【図2A】図2Aは、部分テンプレートの抽出結果の一例を示す図である。
【図2B】図2Bは、部分テンプレート記憶部のデータ構造の一例を示す図である。
【図3】図3は、相関値データのデータ構造の一例を示す図である。
【図4A】図4Aは、部分テンプレートと仮説領域との対応を示す図(1)である。
【図4B】図4Bは、部分テンプレートと仮説領域との対応を示す図(2)である。
【図4C】図4Cは、部分テンプレートと仮説領域との対応を示す図(3)である。
【図4D】図4Dは、部分テンプレートと仮説領域との対応を示す図(4)である。
【図4E】図4Eは、部分テンプレートと仮説領域との対応を示す図(5)である。
【図4F】図4Fは、部分テンプレートと仮説領域との対応を示す図(6)である。
【図5】図5は、仮説領域データのデータ構造の一例を示す図である。
【図6】図6は、全体仮説の処理を説明するための図である。
【図7】図7は、全体仮説データのデータ構造の一例を示す図である。
【図8】図8は、部分テンプレートの座標と理論的な仮説領域の座標との関係を示す図である。
【図9】図9は、評価基準データの一例を示す図である。
【図10】図10は、画像処理装置の処理手順を示すフローチャートである。
【図11】図11は、追尾情報生成処理の処理手順を示すフローチャートである。
【図12】図12は、評価値算出処理の処理手順を示すフローチャートである。
【図13】図13は、実施例にかかる画像処理装置を構成するコンピュータのハードウェア構成を示す図である。
【図14】図14は、従来技術を説明するための図である。
【図15】図15は、従来技術の問題を説明するための図である。
【発明を実施するための形態】
【0014】
以下に、本願の開示する画像処理装置、画像処理方法および画像処理プログラムの実施例を図面に基づいて詳細に説明する。なお、この実施例によりこの発明が限定されるものではない。
【実施例】
【0015】
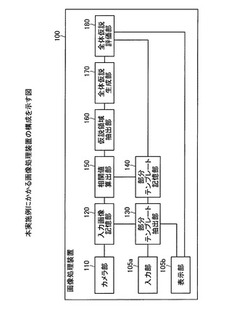
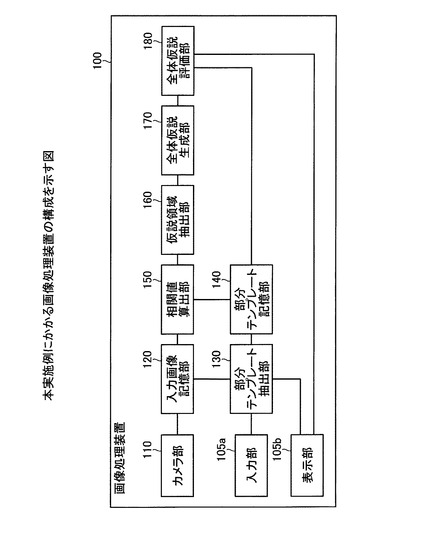
本実施例にかかる画像処理装置の構成について説明する。図1は、本実施例にかかる画像処理装置の構成を示す図である。図1に示すように、画像処理装置100は、入力部105a、表示部105b、カメラ部110を有する。また、画像処理装置100は、入力画像記憶部120、部分テンプレート抽出部130、部分テンプレート記憶部140、相関値算出部150、仮説領域抽出部160、全体仮説生成部170、全体仮説評価部180を有する。
【0016】
入力部105aは、キーボードやマウス等の入力装置に対応する。表示部105bは、ディスプレイ等の表示装置に対応する。例えば、表示部105bは、画像処理装置100の処理結果や、カメラ部110が撮影した画像等を表示する装置である。
【0017】
例えば、利用者は、入力部105aを操作して、追尾対象となる物体を撮影した時刻を、画像処理装置100に入力する。また、利用者は、入力部105aを操作して、追尾対象となる物体が含まれる領域を指定する。
【0018】
カメラ部110は、撮影範囲の画像を撮影し、撮影した画像データを入力画像記憶部120に順次記憶する処理部である。カメラ部110は、例えば、カメラ等の撮像装置に対応する。例えば、カメラ部110は、画像データと、この画像データが撮影された時刻とを対応づけて入力画像が撮影された時刻とを対応づけて、入力画像記憶部120に記憶する。
【0019】
入力画像記憶部120は、画像データと、この画像データが撮影された時刻とを対応づけて記憶する記憶部である。
【0020】
部分テンプレート抽出部130は、追尾対象となる物体の部分領域を、部分テンプレートとして抽出する処理部である。部分テンプレート抽出部130は、部分テンプレートのデータを部分テンプレート記憶部140に格納する。
【0021】
ここで、部分テンプレート抽出部130の処理について説明する。まず、部分テンプレート抽出部130は、入力部105aから時刻を取得し、時刻に対応する画像データを入力画像記憶部120から検出する。以下の説明において、この検出した画像データをテンプレート画像と表記する。部分テンプレート抽出部130は、テンプレート画像を表示部105bに表示させ、追尾対象となる物体の領域を、入力部105aから取得する。
【0022】
部分テンプレート抽出部130は、テンプレート画像内の追尾対象となる物体の領域から、部分テンプレートを抽出する。例えば、部分テンプレート抽出部130は、Harrisコーナー等のコーナー検出法に基づいて、テンプレート画像から部分テンプレートを抽出する。Harrisコーナーは、文献(C. Harris and M. Stephens,(1988) "A combined corner and edge detector". Proceedings of the 4th Alvey Vision Conference. pp. 147−151.)に開示されている。
【0023】
コーナー検出法を用いて、部分テンプレートを抽出する処理の一例について説明する。部分テンプレート抽出部130は、追尾対象となる物体の領域を、複数の部分領域に分割する。部分テンプレート抽出部130は、部分領域がある局所近傍で方向の異なる2つの際立ったエッジが存在するコーナー点を含んでいるか否かを判定する。部分テンプレート抽出部130は、コーナー点を含んでいる部分領域の画像を、部分テンプレートとして抽出する。部分テンプレート抽出部130は、部分テンプレートを部分テンプレート記憶部140に記憶する。
【0024】
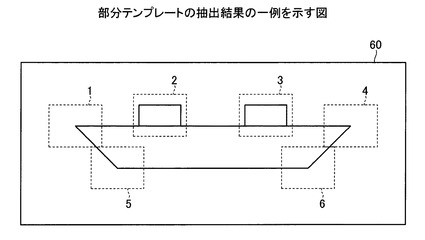
図2Aは、部分テンプレートの抽出結果の一例を示す図である。図2Aの画像60は、テンプレート画像に対応する。図2Aに示す例では、部分テンプレート1〜6が抽出された場合を示している。
【0025】
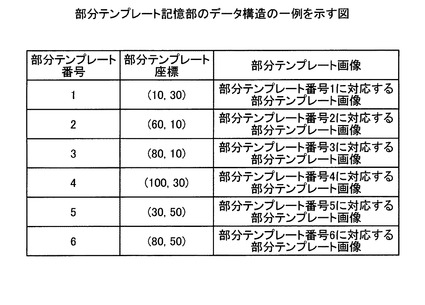
部分テンプレート記憶部140は、部分テンプレートのデータを記憶する記憶装置である。図2Bは、部分テンプレート記憶部のデータ構造の一例を示す図である。図2Bに示すように、部分テンプレート記憶部140は、部分テンプレート番号と、部分テンプレート座標と、部分テンプレート画像とを対応づけて記憶している。ここで、部分テンプレート座標は、部分テンプレートの中心座標である。部分テンプレート画像は、部分テンプレートの画像データである。
【0026】
相関値算出部150は、画像データの各領域と部分テンプレートとの相関値を算出する処理部である。相関値算出部150は、画像データと、該画像データの各領域と部分テンプレートとの相関値データを、仮説領域抽出部160に出力する。
【0027】
例えば、相関値算出部150は、式(1)を利用して、相関値Vを算出する。式(1)において、Rは、部分テンプレートの各画素の輝度に対応する。Sは、部分テンプレートの領域と重なる、画像データの領域の各画素の輝度に対応する。なお、式(1)に含まれるΣ1は、部分テンプレートに含まれる画素の数に対応する。
【0028】
【数1】

【0029】
相関値算出部150は、画像データの領域上で、部分テンプレートの位置を順次移動させ、式(1)を利用して、領域毎の相関値Vを算出する。部分テンプレート記憶部140には、複数の部分テンプレートが格納されている。相関値算出部150は、部分テンプレートを部分テンプレート記憶部140から順次取得し、部分テンプレート毎に相関値を算出する。部分テンプレート毎の相関値の情報を相関値データと表記する。
【0030】
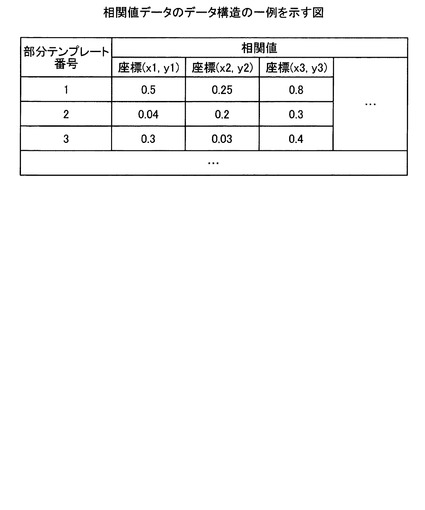
図3は、相関値データのデータ構造の一例を示す図である。図3に示すように、この相関値データは、部分テンプレート番号と相関値とを対応づけている。部分テンプレート番号は、部分テンプレートを識別する番号である。相関値は、座標毎の部分テンプレートとの画像データとの相関値を示す。ここで、座標は、相関値を算出した領域の中心座標に対応する。
【0031】
仮説領域抽出部160は、相関データを基にして、部分テンプレートに類似する画像データ上の領域を仮説領域として抽出する処理部である。仮説領域抽出部160は、仮説領域データを全体仮説生成部170に出力する。
【0032】
仮説領域抽出部160が、仮説領域を抽出する処理について説明する。仮説領域抽出部160は、部分テンプレート毎に、相関値が極大点をとる座標を判定する。そして、仮説領域抽出部160は、相関値が極大となる座標のうち、この極大値が所定の閾値を超える座標を、仮説領域として抽出する。仮説領域抽出部160は、単一の部分テンプレートに対して、所定の閾値を超える極大値が複数存在する場合には、各極大値をとる座標を仮説領域とする。
【0033】
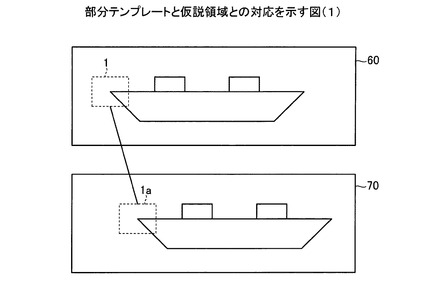
図4A〜図4Fは、部分テンプレートと仮説領域との対応を示す図である。図4Aにおいて、画像60は、テンプレート画像であり、画像70は、画像データである。部分テンプレート1と、画像70の各領域との相関値が、領域1aにおいて極大となり、極大値が所定の閾値を超えるものとする。この場合には、仮説領域抽出部160は、領域1aを、部分テンプレート1の仮説領域1aとして抽出する。
【0034】
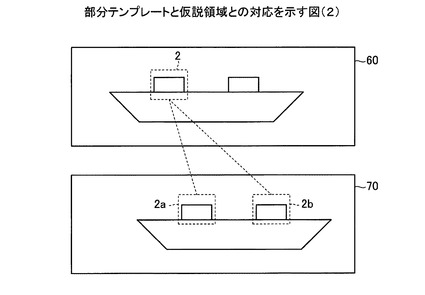
図4Bにおいて、部分テンプレート2と、画像70の各領域との相関値が、領域2a、2bにおいて極大となり、極大値が所定の閾値を超えるものとする。この場合には、仮説領域抽出部160は、領域2a、2bを、部分テンプレート2の仮説領域2a、2bとして抽出する。
【0035】
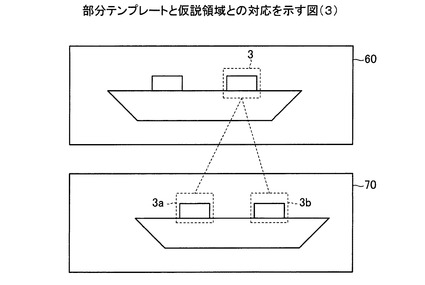
図4Cにおいて、部分テンプレート3と、画像70の各領域との相関値が、領域3a、3bにおいて極大となり、極大値が所定の閾値を超えるものとする。この場合には、仮説領域抽出部160は、領域3a、3bを、部分テンプレート3の仮説領域3a、3bとして抽出する。
【0036】
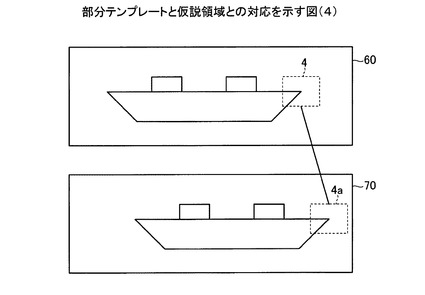
図4Dにおいて、部分テンプレート4と、画像70の各領域との相関値が、領域4aにおいて極大となり、極大値が所定の閾値を超えるものとする。この場合には、仮説領域抽出部160は、領域4aを、部分テンプレート4の仮説領域4aとして抽出する。
【0037】
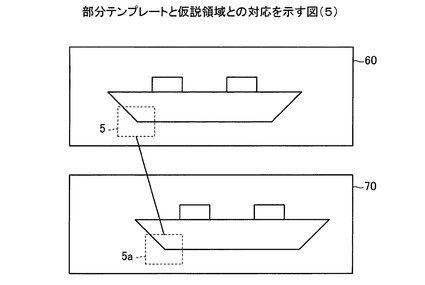
図4Eにおいて、部分テンプレート5と、画像70の各領域との相関値が、領域5aにおいて極大となり、極大値が所定の閾値を超えるものとする。この場合には、仮説領域抽出部160は、領域5aを、部分テンプレート5の仮説領域5aとして抽出する。
【0038】
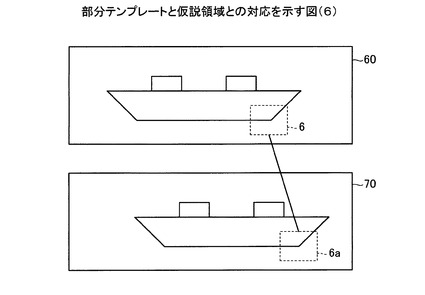
図4Fにおいて、部分テンプレート6と、画像70の各領域との相関値が、領域6aにおいて極大となり、極大値が所定の閾値を超えるものとする。この場合には、仮説領域抽出部160は、領域6aを、部分テンプレート6の仮説領域6aとして抽出する。
【0039】
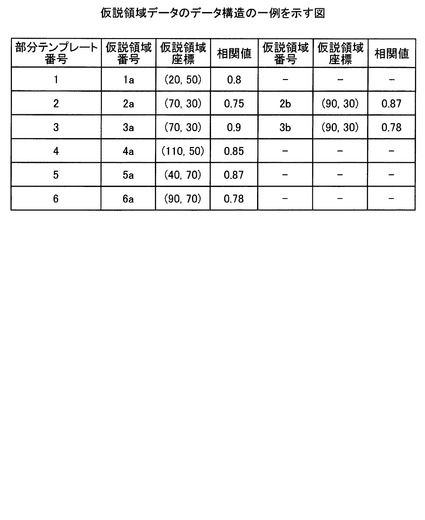
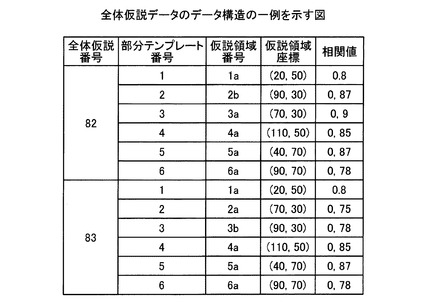
仮説領域抽出部160は、部分テンプレートと、部分テンプレートに対応する仮説領域の座標とを対応づけた仮説領域データを生成する。図5は、仮説領域データのデータ構造の一例を示す図である。図5に示すように、この仮説領域データは、部分テンプレート番号と、仮説領域番号、仮説領域座標、相関値とを対応づけている。例えば、図5の1段目に示す例では、部分テンプレート番号「1」に対応する仮説領域番号は「1a」である。そして、仮説領域座標が「20、50」であり、部分テンプレートと仮説領域との相関値が「0.8」である旨が登録されている。なお、仮説領域座標を中心とする所定の大きさの矩形内領域が、仮説領域に対応する。
【0040】
図5に示す例では、部分テンプレート番号1、4〜6の部分テンプレートには、単一の仮説領域が存在しているため、単一の仮説領域番号と仮説領域座標と相関値との組が存在する。部分テンプレート番号2、3の部分テンプレートには、2つの仮説領域が存在するため、2つの仮説領域番号と仮説領域座標と相関値との組が存在する。
【0041】
全体仮説生成部170は、仮説領域データを基にして、部分テンプレートに対応する各仮説領域を組み合わせることで、全体仮説データを生成する処理部である。ただし、全体仮説生成部170は、同一の部分テンプレートに属する仮説領域の組み合わせを除く。また、全体仮説生成部170は、仮説領域を組み合わせた場合に、重複する組み合わせを削除する。
【0042】
ここで、重複する組み合わせとは、実質同一の仮説領域が複数存在する組み合わせを意味する。例えば、図4Bおよび図4Cにおいて、仮説領域2aと仮説領域3aとは、実質同一の仮説領域である。また、仮説領域2bと、仮説領域3bとは実質同一の仮説領域である。異なる部分テンプレートが、同一の仮説領域に一致することはない。このため、全体仮説生成部170は、実質同一の仮説領域が複数存在する組み合わせを削除する。
【0043】
なお、全体仮説生成部170は、各仮説領域の座標を比較して、実質同一の仮説領域であるか否かを判定する。座標が一致する場合には、各仮説領域は、実質同一の仮説領域となる。
【0044】
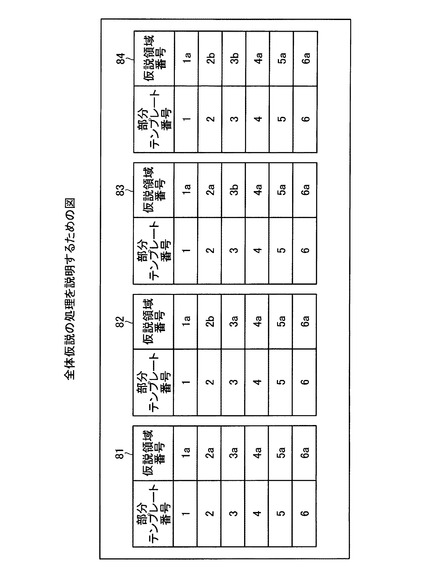
全体仮説生成部170の処理について説明する。図6は、全体仮説の処理を説明するための図である。部分テンプレート1に対応する仮説領域が1個、部分テンプレート2に対応する仮説領域が2個、部分テンプレート3に対応する仮説領域が2個存在する。また、部分テンプレート4に対応する仮説領域が1個、部分テンプレート5に対応する仮説領域が1個、部分テンプレート6に対応する仮説領域が1個である。このため、重複の有無を条件とせず、各仮説領域を組み合わせると、図6に示すように4種類の組み合わせが生成される。各組み合わせをそれぞれ全体仮説81〜84とする。
【0045】
全体仮説生成部170は、全体仮説81〜84を参照し、同一の全体仮説に、実質同一の仮説領域が含まれているか否かを判定する。実質同一の仮説領域は、仮説領域2aおよび仮説領域3aと、仮説領域2bおよび仮説領域3bである。全体仮説81〜84のうち、全体仮説81は、仮説領域2a、3aを有しているので、重複する組み合わせである。また、全体仮説84は、仮説領域2b、3bを有しているので、重複する組み合わせである。このため、全体仮説生成部170は、全体仮説81、84を削除する。
【0046】
全体仮説生成部170は、重複する全体仮説を削除した全体仮説を含む全体仮説データを生成し、全体仮説データを全体仮説評価部180に出力する。図7は、全体仮説データのデータ構造の一例を示す図である。図7に示すように、全体仮説番号と、部分テンプレート番号と、仮説領域番号と、仮説領域座標と、相関値とを対応づけている。全体仮説番号は、全体仮説を識別する番号である。部分テンプレート番号、仮説領域番号、仮説領域座標、相関値に関する説明は、上記のものと同様である。
【0047】
全体仮説評価部180は、全体仮説に含まれる各仮説領域の相関値、および、推定パラメータによる理論的な仮説領域の座標と実際の仮説領域の座標との誤差から、各全体仮説を評価し、最適な全体仮説を判定する処理部である。
【0048】
まず、全体仮説評価部180が、理論的な仮説領域の座標を求める処理について説明する。全体仮説評価部180は、部分パラメータの座標から全体仮説に含まれる仮説領域の座標への変換式(2)を求める。ここでは、部分パラメータの座標を(x、y)とし、仮説領域の座標を(x’、y’)とする。
【0049】
【数2】
【0050】
式(2)において、a1、b1、c1、d1、e1、f1は、アフィン変換パラメータである。例えば、全体仮説評価部180は、最小2乗法を利用してアフィン変換パラメータを推定する。本実施例では、部分テンプレートの座標(x、y)と仮想領域の座標(x’、y’)との組が、6組存在する。各組をそれぞれ「(x1、y1)、(x’1、y’1)」、「(x2、y2)、(x’2、y’2)」、「(x3、y3)、(x’3、y’3)」、「(x4、y4)、(x’4、y’4)」とする。また、「(x5、y5)、(x’5、y’5)」、「(x6、y6)、(x’6、y’6)」とする。
【0051】
上記の式(2)に、各組の値を代入することで、以下の12個の式(3)〜(14)が得られる。
【0052】
x’1=a1x1+b1y1+e1・・・(3)
【0053】
x’2=a1x2+b1y2+e1・・・(4)
【0054】
x’3=a1x3+b1y3+e1・・・(5)
【0055】
x’4=a1x4+b1y4+e1・・・(6)
【0056】
x’5=a1x5+b1y5+e1・・・(7)
【0057】
x’6=a1x6+b1y6+e1・・・(8)
【0058】
y’1=c1x1+d1y1+f1・・・(9)
【0059】
y’2=c1x2+d1y2+f1・・・(10)
【0060】
y’3=c1x3+d1y3+f1・・・(11)
【0061】
y’4=c1x4+d1y4+f1・・・(12)
【0062】
y’5=c1x5+d1y5+f1・・・(13)
【0063】
y’6=c1x6+d1y6+f1・・・(14)
【0064】
このうち、式(3)〜式(8)は、式(15)、式(16)、式(17)を用いると、式(18)で表すことができる。
【0065】
【数3】
【0066】
【数4】
【0067】
【数5】
【0068】
Y1=X1β1・・・(18)
【0069】
式(18)のβ1の最小2乗推定値は、式(19)であることから、アフィン変換パラメータ(a1、b1、e1)が求まる。
【0070】
【数6】
【0071】
一方、式(9)〜式(14)は、式(20)、式(21)、式(22)を用いると、式(23)で表すことができる。
【0072】
【数7】
【0073】
【数8】
【0074】
【数9】
【0075】
Y2=X2β2・・・(23)
【0076】
式(23)のβ2の最小2乗推定値は、式(24)であることから、アフィン変換パラメータ(c1、d1、f1)が求まる。
【0077】
【数10】
【0078】
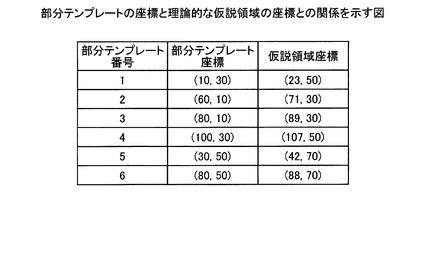
全体仮説評価部180は、上記アフィン変換パラメータを求めた後に、式(2)に部分テンプレートの座標を代入することで、理論的な仮説領域の座標を算出する。図8は、部分テンプレートの座標と理論的な仮説領域の座標との関係を示す図である。例えば、図8
の1段目では、部分テンプレート座標(10、30)を、式(2)に代入することにより、理論的な仮説領域座標(23、50)が求められる。その他の理論的な仮説領域座標も、部分テンプレート座標を代入することで求められる。
【0079】
全体仮説評価部180は、部分テンプレートに対応する理論的な仮説領域の座標を求めた後に、この理論的な仮説領域の座標と、実際の仮説領域の座標との誤差を算出する。全体仮説評価部180は、同一の部分テンプレート番号に対応する理論的な座標と、実際の仮説領域の座標との誤差を求める。一例として、同一の部分テンプレート番号に対応する理論的な座標と、実際の仮説領域の座標のユーグリッド距離を誤差として採用してもよい。
【0080】
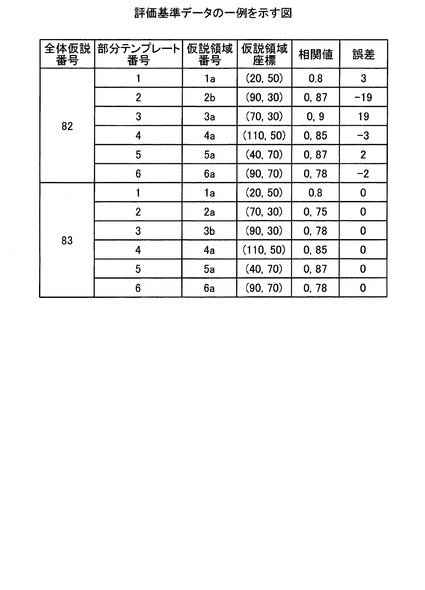
一例として、全体仮説82の仮説領域番号1aの誤差を求める場合について説明する。図7、図8を参照する。仮説領域番号1aの仮説領域座標は、(20、50)である。この仮説領域番号1aの仮説領域座標が、実際の仮説領域の座標に対応する。また、仮説領域番号1aに対応する部分テンプレート番号は「1」であり、この部分テンプレートの座標から求められる理論的な仮説領域の座標は(23、50)である。例えば、誤差を座標間の距離とすると、理論的な仮説領域の座標(23、50)と、実際の仮説領域の座標(20、50)との誤差は「3」となる。全体仮説評価部180は、他の誤差も算出する。
【0081】
全体仮説評価部180は、各誤差を求めた後に、評価基準データを生成する。図9は、評価基準データの一例を示す図である。図9に示すように、評価基準データは、全体仮説番号、部分テンプレート番号、仮説領域番号、仮説領域座標、相関値、誤差を対応づけている。図9に示すように、全体仮説番号の仮説領域番号毎に、誤差が登録されている。例えば、全体仮説番号82の各仮説領域番号1a、2b、3a、4a、5a、6aの誤差は3、−19、19、−3、2、−2となる。また、全体仮説番号83の各仮説領域番号1a、2a、3b、4a、5a、6aの誤差は全て0となる。なお、図9の全体仮説番号、部分テンプレート番号、仮説領域番号、仮説領域座標、相関値に関する説明は、図7のものと同様である。
【0082】
全体仮説評価部180は、評価基準データを基にして、各全体仮説の評価値を算出する。全体仮説評価部180は、全体仮説に含まれる仮説領域毎に、スコアを算出し、スコアを合計することで、該当する全体仮説の評価値を算出する。全体仮説評価部180は、式(25)に基づいて、スコアを算出する。式(25)において、αおよびβは、重みに関する係数である。ここでは一例として、αの値を0.1、βの値を1とする。また、誤差の値は絶対値を用いる。
【0083】
Score=α×誤差+β×(1.0−相関値)・・・(25)
【0084】
全体仮説評価部180は、式(25)に基づいて、全体仮説番号82、83に対応する全体仮説の評価値を算出する。そうすると、全体仮説番号82に対応する全体仮説の評価値が「5.73」となる。また、全体仮説番号83に対応する全体仮説の評価値が「1.17」となる。
【0085】
全体仮説評価部180は、各全体仮説に対応する評価値のうち、最小となる全体仮説番号を選択する。全体仮説評価部180は、各全体仮説の評価値を比較すると、全体仮説番号83に対応する全体仮説の評価値が最小となる。このため、全体仮説評価部180は、全体仮説番号83の全体仮説を選択する。全体仮説評価部180が、選択した全体仮説が、最適な全体仮説となる。
【0086】
全体仮説評価部180は、最適な全体仮説を判定した後に、追尾情報を生成する。例えば、全体仮説評価部180は、判定した全体仮説に含まれる各仮説領域の座標の重心を算出し、算出した重心の座標を追尾情報とする。全体仮説評価部180は、生成した追尾情報を、各種処理装置に出力する。各種処理装置は、追尾情報を基にして、追尾対象となる物体の画像上での座標を把握し、各種処理を行う。例えば、各種処理装置は、追尾情報を基にして、追尾対象となる物体と枠とを重畳表示し、視認性を高める。
【0087】
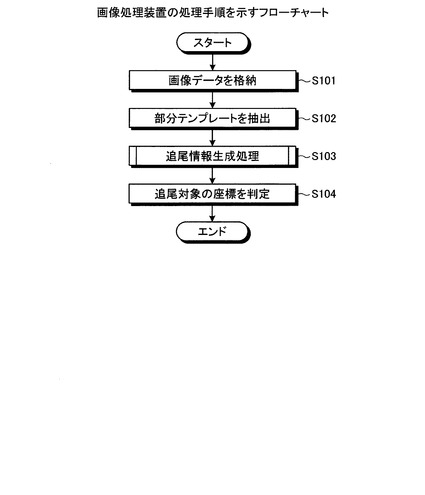
次に、本実施例の画像処理装置100の処理手順について説明する。図10は、画像処理装置の処理手順を示すフローチャートである。例えば、図10に示す処理は、カメラ部110によって撮影された画像の画像データが、入力画像記憶部120に記憶されたことを契機にして実行される。図10に示すように、画像処理装置100は、画像データを格納し(ステップS101)、部分テンプレートを抽出する(ステップS102)。画像処理装置100は、追尾情報生成処理を実行し(ステップS103)、追尾対象の座標を判定する(ステップS104)。
【0088】
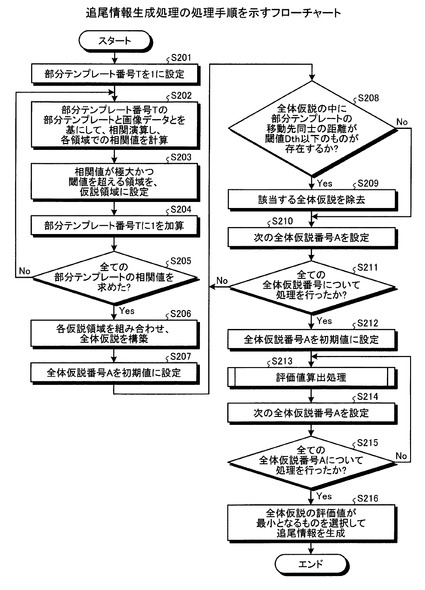
次に、図10のステップS103に示した追尾情報生成処理について説明する。図11は、追尾情報生成処理の処理手順を示すフローチャートである。図11に示すように、画像処理装置100は、部分テンプレート番号Tに1を設定し(ステップS201)、部分テンプレート番号Tの部分テンプレートと画像データとを基にして、相関演算し、各領域での相関値を計算する(ステップS202)。
【0089】
画像処理装置100は、相関値が極大かつ閾値を超える領域を、仮説領域に設定し(ステップS203)、部分テンプレート番号Tに1を加算する(ステップS204)。画像処理装置100は、全ての部分テンプレートの相関値を求めていない場合には(ステップS205,No)、ステップS202に移行する。
【0090】
画像処理装置100は、全ての部分テンプレートの相関値を求めた場合には(ステップS205,Yes)、各仮説領域を組み合わせ、全体仮説を構築する(ステップS206)。画像処理装置100は、全体仮説番号Aを初期値に設定する(ステップS207)。
【0091】
画像処理装置100は、全体仮説の中に、部分テンプレートの移動先同士の距離が閾値Dth以下のものが存在するかを判定する(ステップS208)。画像処理装置100は、閾値Dth以下のものが存在しない場合には(ステップS208,No)、ステップS210に移行する。
【0092】
一方、画像処理装置100は、閾値Dth以下のものが存在する場合には(ステップS208,Yes)、該当する全体仮説を除去する(ステップS209)。画像処理装置100は、次の全体仮説番号Aを設定し(ステップS210)、全ての全体仮説番号Aについて、ステップS208の処理を行ったか否かを判定する(ステップS211)。
【0093】
画像処理装置100は、全ての全体仮説番号Aについて処理を行っていない場合には(ステップS211,No)、ステップS208に移行する。一方、画像処理装置100は、全ての全体仮説番号Aについて処理を行った場合には(ステップS211,Yes)、全体仮説番号Aを初期値に設定する(ステップS212)。
【0094】
画像処理装置100は、評価値算出処理を実行し(ステップS213)、次の全体仮説番号Aを設定する(ステップS214)。画像処理装置100は、全ての全体仮説番号AについてステップS213の処理を行ったか否かを判定する(ステップS215)。
【0095】
画像処理装置100は、全ての全体仮説番号Aについて処理を行っていない場合には(ステップS215,No)、ステップS213に移行する。一方、画像処理装置100は、全ての全体仮説番号Aについて処理を行った場合には(ステップS215,Yes)、全体仮説の評価値が最小となるものを選択して追尾情報を生成する(ステップS216)。
【0096】
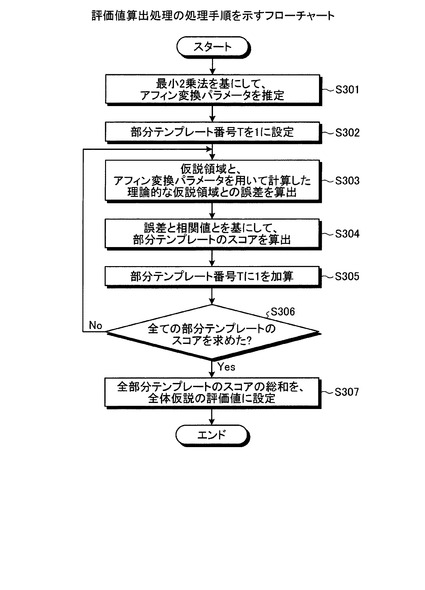
次に、図11のステップS213に示した評価値算出処理の処理手順について説明する。図12は、評価値算出処理の処理手順を示すフローチャートである。図12に示すように、画像処理装置100は、最小2乗法を基にして、アフィン変換パラメータを推定する(ステップS301)。
【0097】
画像処理装置100は、部分テンプレート番号Tを1に設定し(ステップS302)、仮説領域と、アフィン変換パラメータを用いて計算した理論的な仮説領域との誤差を算出する(ステップS303)。
【0098】
画像処理装置100は、誤差と相関値とを基にして、部分テンプレートのスコアを算出し(ステップS304)、部分テンプレート番号に1を加算する(ステップS305)。画像処理装置100は、全ての部分テンプレートのスコアを求めたか否かを判定する(ステップS306)。
【0099】
画像処理装置100は、全ての部分テンプレートのスコアを求めていない場合には(ステップS306,No)、ステップS303に移行する。一方、画像処理装置100は、全ての部分テンプレートのスコアを求めた場合には(ステップS306,Yes)、全部分テンプレートのスコアの総和を、全体仮説の評価値に設定する(ステップS307)。
【0100】
次に、本実施例にかかる画像処理装置100の効果について説明する。画像処理装置100は、部分プレートと画像データとマッチングして、追尾対象の各部分の移動先の候補を、仮説領域として抽出する。そして、画像処理装置100は、各仮説領域を重複しないように組み合わせ、組み合わせの評価値に基づいて、最適な組み合わせを選択する。このため、追跡対象の物体に類似する領域が複数存在し、類似する領域を部分テンプレートとした場合であっても、可能性の低い組み合わせを評価値に基づいて排除でき、安定した追尾処理を行うことができる。
【0101】
また、画像処理装置100は、部分テンプレートの座標と、仮説領域との関係からアフィン変換パラメータを求める。そして、画像処理装置100は、アフィン変換パラメータから導かれる理論的な座標と、全体仮説に含まれる仮説領域の座標との誤差を基にして、全体仮説の評価値を算出する。このため、理論的に相応しくない仮説領域を多く含む全体仮説を排除できる。
【0102】
また、画像処理装置100は、上記の誤差に加えて、部分テンプレートの相関値を利用して、全体仮説の評価値を算出する。このため、全体仮説の評価値の信頼度をより高めることができ、全体仮説の選択処理の精度が向上する。
【0103】
ところで、画像処理装置100の各構成要素は機能概念的なものであり、必ずしも物理的に図示の如く構成されていることを要しない。すなわち、画像処理装置100の分散、統合の具体的形態は図示のものに限られず、その全部または一部を、各種の負荷や使用状況などに応じて、任意の単位で機能的または物理的に分散・統合して構成することができる。例えば、画像処理装置100は、ネットワークを介して外部のカメラと接続し、画像データを取得してもよい。
【0104】
また、部分テンプレート抽出部130は、追尾対象となる物体の領域を、入力部105aから取得し、取得した領域内の画像から部分テンプレートを抽出していたがこれに限定されるものではない。例えば、部分テンプレート130は、追尾対象となる物体の画像データを保持しておき、この画像データと、テンプレート画像とをマッチングして、追尾対象となる物体の領域を自動的に判定してもよい。また、利用者は、入力部105aを操作して、部分テンプレートを指定してもよい。
【0105】
また、画像処理装置100は、既存のPC(Personal Computer)などの情報処理装置に、画像処理装置100の各機能を搭載することによって実現することもできる。
【0106】
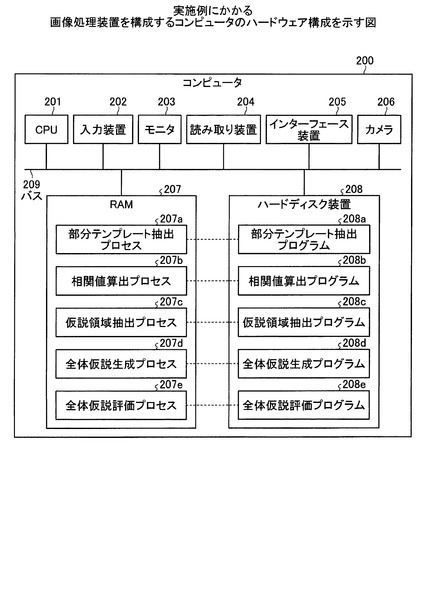
図13は、実施例にかかる画像処理装置を構成するコンピュータのハードウェア構成を示す図である。図13に示すように、このコンピュータ200は、各種演算処理を実行するCPU(Central Processing Unit)201と、ユーザからのデータの入力を受け付ける入力装置202と、ディスプレイ203とを有する。また、コンピュータ200は、記憶媒体からプログラム等を読み取る読み取り装置204と、ネットワークを介して他の装置と通信を行うインターフェース装置205、画像を撮影するカメラ206とを有する。また、コンピュータ200は、各種情報を一時記憶するRAM(Random Access Memory)207と、ハードディスク装置208とを有する。各装置201〜208は、バス209に接続される。
【0107】
ハードディスク装置208は、部分テンプレート抽出プログラム208a、相関値算出プログラム208b、仮説領域抽出プログラム208c、全体仮説生成プログラム208d、全体仮説評価プログラム208eを記憶する。
【0108】
CPU201は、ハードディスク装置208に記憶された各プログラム208a〜208eを読み出して、RAM207に展開する。これにより、部分テンプレート抽出プログラム208aは、部分テンプレート抽出プロセス207aとして機能する。相関値算出プログラム208bは、相関値算出プロセス207bとして機能する。仮説領域抽出プログラム208cは、仮説領域抽出プロセス207cとして機能する。全体仮説生成プログラム208dは、全体仮説生成プロセス207dとして機能する。全体仮説評価プログラム208eは、全体仮説評価プロセス207eとして機能する。
【0109】
部分テンプレート抽出プロセス207aは、図1の部分テンプレート抽出部130に対応する。相関値算出プロセス207bは、図1の相関値算出部150に対応する。仮説領域抽出プロセス207cは、図1の仮説領域抽出部160に対応する。全体仮説生成プロセス207dは、全体仮説生成部170に対応する。全体仮説評価プロセス207eは、図1の全体仮説評価部180に対応する。CPU201は、各プロセス207a〜207eにより、画像データの所定の物体を追従する。
【0110】
なお、上記のプログラム208a〜208eは、必ずしもハードディスク装置208に格納されている必要はない。例えば、CD−ROM等の記憶媒体に記憶されたプログラム208a〜208eを、コンピュータ200が読み出して実行するようにしてもよい。また、公衆回線、インターネット、LAN(Local Area Network)、WAN(Wide Area Network)等に接続された記憶装置に、各プログラム208a〜208bを記憶させておいてもよい。この場合、コンピュータ200がこれらから各プログラム208a〜208eを読み出して実行するようにしてもよい。
【0111】
なお、図1に示した各記憶装置120、140は、例えば、RAM(Random Access Memory)、ROM(Read Only Memory)、フラッシュメモリ(Flash Memory)などの半導体メモリ素子、またはハードディスク、光ディスクなどの記憶装置に対応する。
【0112】
また、図1に示した各処理部130、150〜180は、ASIC(Application Specific Integrated Circuit)や、FPGA(Field Programmable Gate Array)などの集積装置に対応する。また、各処理部130、150〜180は、例えば、CPUやMPU(Micro Processing Unit)等の電子回路に対応する。
【0113】
以上の各実施例を含む実施形態に関し、さらに以下の付記を開示する。
【0114】
(付記1)追尾対象となる物体の各局所部分の画像を含む複数の部分テンプレートと、カメラが撮影したカメラ画像とを比較して、部分テンプレートとカメラ画像内の各領域との相関値を算出する相関値算出部と、
前記相関値に基づいて、前記部分テンプレートに類似する前記カメラ画像内の領域を仮説領域として複数抽出する仮説領域抽出部と、
複数の仮説領域を重複しないように組み合わせた複数の全体仮説情報を生成する全体仮説生成部と、
前記複数の全体仮説情報について、それぞれの評価値を算出し、各評価値に基づいて複数の全体仮説情報から単一の全体仮説情報を選択する全体仮説評価部と
を有することを特徴とする画像処理装置。
【0115】
(付記2)前記全体仮説評価部は、前記部分テンプレートの座標と前記仮説領域の座標との関係からアフィン変換パラメータを求め、該アフィン変換パラメータから導かれる座標と、前記仮説領域の座標との誤差を基にして、前記全体仮説情報の評価値を算出することを特徴とする付記1に記載の画像処理装置。
【0116】
(付記3)前記全体仮説評価部は、部分テンプレートの相関値を更に利用して、前記全体仮説情報の評価値を算出することを特徴とする付記2に記載の画像処理装置。
【0117】
(付記4)コンピュータが実行する画像処理方法であって、
追尾対象となる物体の各局所部分の画像を含む複数の部分テンプレートと、カメラが撮影したカメラ画像とを比較して、部分テンプレートとカメラ画像内の各領域との相関値を算出し、
前記相関値に基づいて、前記部分テンプレートに類似する前記カメラ画像内の領域を仮説領域として複数抽出し、
複数の仮説領域を重複しないように組み合わせた複数の全体仮説情報を生成し、
前記複数の全体仮説情報について、それぞれの評価値を算出し、各評価値に基づいて複数の全体仮説情報から単一の全体仮説情報を選択することを特徴とする画像処理方法。
【0118】
(付記5)前記部分テンプレートの座標と前記仮説領域の座標との関係からアフィン変換パラメータを求め、該アフィン変換パラメータから導かれる座標と、前記仮説領域の座標との誤差を基にして、前記全体仮説情報の評価値を算出することを特徴とする付記4に記載の画像処理方法。
【0119】
(付記6)部分テンプレートの相関値を更に利用して、前記全体仮説情報の評価値を算出することを特徴とする付記5に記載の画像処理方法。
【0120】
(付記7)コンピュータに、
追尾対象となる物体の各局所部分の画像を含む複数の部分テンプレートと、カメラが撮影したカメラ画像とを比較して、部分テンプレートとカメラ画像内の各領域との相関値を算出し、
前記相関値に基づいて、前記部分テンプレートに類似する前記カメラ画像内の領域を仮説領域として複数抽出し、
複数の仮説領域を重複しないように組み合わせた複数の全体仮説情報を生成し、
前記複数の全体仮説情報について、それぞれの評価値を算出し、各評価値に基づいて複数の全体仮説情報から単一の全体仮説情報を選択する処理を実行させる画像処理プログラム。
【0121】
(付記8)前記部分テンプレートの座標と前記仮説領域の座標との関係からアフィン変換パラメータを求め、該アフィン変換パラメータから導かれる座標と、前記仮説領域の座標との誤差を基にして、前記全体仮説情報の評価値を算出することを特徴とする付記7に記載の画像処理プログラム。
【0122】
(付記9)部分テンプレートの相関値を更に利用して、前記全体仮説情報の評価値を算出することを特徴とする付記8に記載の画像処理プログラム。
【符号の説明】
【0123】
110 カメラ部
120 入力画像記憶部
130 部分テンプレート抽出部
140 部分テンプレート記憶部
150 相関値算出部
160 仮説領域抽出部
170 全体仮説生成部
180 全体仮説評価部
【技術分野】
【0001】
本発明は、画像処理装置等に関する。
【背景技術】
【0002】
カメラが撮影した画像を解析し、画像内の所定の物体を追尾する画像処理装置が存在する。例えば、従来の画像処理装置は、追尾対象となる物体の特徴的な部分の画像を部分テンプレートとして用いる。この特徴的な部分は、例えば、物体の端に対応する。画像処理装置は、部分テンプレートと追尾対象の画像との相関演算を行い、相関値が最大となる領域を部分テンプレートに該当する領域と判定する。画像処理装置は、連続する画像に対して、部分テンプレートに該当する領域を順次判定し、判定結果に基づいて、物体の移動量を推定する。
【0003】
図14は、従来技術を説明するための図である。図14の10は、物体のテンプレート画像である。ここでは、追尾する物体を船とする。テンプレート画像10には、部分テンプレート10a〜10eが含まれる。例えば、部分テンプレート10aは、船の船橋部分の画像である。部分テンプレート10b、10cは、船首部分の画像である。部分テンプレート10d、10eは、船尾部分の画像である。
【0004】
図14の20は、追尾対象の画像である。画像処理装置は、部分テンプレート10a〜10eと画像20とを基にして相関演算を行い、相関値が最大となる領域を判定する。図14に示す例では、部分テンプレート10a〜10eとの相関値が最大となる領域は、20a〜20eとなる。
【0005】
画像処理装置は、画像20の次のフレームとなる画像30に対しても、部分テンプレート10a〜10eと画像20とを基にして相関演算を行い、相関値が最大となる領域を判定する。図14に示す例では、部分テンプレート10a〜10eとの相関値が最大となる位置は、30a〜30eとなる。
【0006】
画像20内の領域20a〜20eは、画像30内の領域30a〜30eにそれぞれ対応している。このため、例えば、画像処理装置は、領域20a〜20eから領域30a〜30eの各移動量を統合することで、船の移動量を推定し、船を追尾する。
【先行技術文献】
【特許文献】
【0007】
【特許文献1】特開2001−34756号公報
【発明の概要】
【発明が解決しようとする課題】
【0008】
しかしながら、上述した従来技術では、画像内の物体を安定して追尾することができないという問題があった。
【0009】
図15は、従来技術の問題を説明するための図である。図15に示すように、追尾対象となる物体に類似する部分が複数存在し、この類似の部分を部分テンプレートとした場合に、画像内の物体を安定して追尾できなくなる。図15では、画像40の船に類似の部分41、42が存在している。このため、画像処理装置が、領域43を部分テンプレートとすると、追尾対象の画像50内の領域51、52において、相関値が高くなり、どちらが部分テンプレート43に対応する領域なのかを判定できない。同様に、画像処理装置が、領域44を部分テンプレートとすると、画像50内の領域51、52において、相関値が高くなり、どちらが部分テンプレートに対応する領域なのかを判定できない。
【0010】
開示の技術は、上記に鑑みてなされたものであって、画像内の物体を安定して追尾することができる画像処理装置、画像処理方法および画像処理プログラムを提供することを目的とする。
【課題を解決するための手段】
【0011】
開示の画像処理装置は、相関値算出部と、仮説領域抽出部と、全体仮説生成部と、全体仮説評価部を有する。相関値算出部は、追尾対象となる物体の各局所部分の画像を含む複数の部分テンプレートと、カメラが撮影したカメラ画像とを比較して、部分テンプレートとカメラ画像内の各領域との相関値を算出する。仮説領域抽出部は、相関値に基づいて、前記部分テンプレートに類似する前記カメラ画像内の領域を仮説領域として複数抽出する。全体仮説抽出部は、複数の仮説領域を重複しないように組み合わせた複数の全体仮説情報を生成する。全体仮説評価部は、複数の全体仮説情報について、それぞれの評価値を算出し、各評価値に基づいて複数の全体仮説情報から単一の全体仮説情報を選択する。
【発明の効果】
【0012】
開示の画像処理装置によれば、画像内の物体を安定して追尾することができるという効果を奏する。
【図面の簡単な説明】
【0013】
【図1】図1は、本実施例にかかる画像処理装置の構成を示す図である。
【図2A】図2Aは、部分テンプレートの抽出結果の一例を示す図である。
【図2B】図2Bは、部分テンプレート記憶部のデータ構造の一例を示す図である。
【図3】図3は、相関値データのデータ構造の一例を示す図である。
【図4A】図4Aは、部分テンプレートと仮説領域との対応を示す図(1)である。
【図4B】図4Bは、部分テンプレートと仮説領域との対応を示す図(2)である。
【図4C】図4Cは、部分テンプレートと仮説領域との対応を示す図(3)である。
【図4D】図4Dは、部分テンプレートと仮説領域との対応を示す図(4)である。
【図4E】図4Eは、部分テンプレートと仮説領域との対応を示す図(5)である。
【図4F】図4Fは、部分テンプレートと仮説領域との対応を示す図(6)である。
【図5】図5は、仮説領域データのデータ構造の一例を示す図である。
【図6】図6は、全体仮説の処理を説明するための図である。
【図7】図7は、全体仮説データのデータ構造の一例を示す図である。
【図8】図8は、部分テンプレートの座標と理論的な仮説領域の座標との関係を示す図である。
【図9】図9は、評価基準データの一例を示す図である。
【図10】図10は、画像処理装置の処理手順を示すフローチャートである。
【図11】図11は、追尾情報生成処理の処理手順を示すフローチャートである。
【図12】図12は、評価値算出処理の処理手順を示すフローチャートである。
【図13】図13は、実施例にかかる画像処理装置を構成するコンピュータのハードウェア構成を示す図である。
【図14】図14は、従来技術を説明するための図である。
【図15】図15は、従来技術の問題を説明するための図である。
【発明を実施するための形態】
【0014】
以下に、本願の開示する画像処理装置、画像処理方法および画像処理プログラムの実施例を図面に基づいて詳細に説明する。なお、この実施例によりこの発明が限定されるものではない。
【実施例】
【0015】
本実施例にかかる画像処理装置の構成について説明する。図1は、本実施例にかかる画像処理装置の構成を示す図である。図1に示すように、画像処理装置100は、入力部105a、表示部105b、カメラ部110を有する。また、画像処理装置100は、入力画像記憶部120、部分テンプレート抽出部130、部分テンプレート記憶部140、相関値算出部150、仮説領域抽出部160、全体仮説生成部170、全体仮説評価部180を有する。
【0016】
入力部105aは、キーボードやマウス等の入力装置に対応する。表示部105bは、ディスプレイ等の表示装置に対応する。例えば、表示部105bは、画像処理装置100の処理結果や、カメラ部110が撮影した画像等を表示する装置である。
【0017】
例えば、利用者は、入力部105aを操作して、追尾対象となる物体を撮影した時刻を、画像処理装置100に入力する。また、利用者は、入力部105aを操作して、追尾対象となる物体が含まれる領域を指定する。
【0018】
カメラ部110は、撮影範囲の画像を撮影し、撮影した画像データを入力画像記憶部120に順次記憶する処理部である。カメラ部110は、例えば、カメラ等の撮像装置に対応する。例えば、カメラ部110は、画像データと、この画像データが撮影された時刻とを対応づけて入力画像が撮影された時刻とを対応づけて、入力画像記憶部120に記憶する。
【0019】
入力画像記憶部120は、画像データと、この画像データが撮影された時刻とを対応づけて記憶する記憶部である。
【0020】
部分テンプレート抽出部130は、追尾対象となる物体の部分領域を、部分テンプレートとして抽出する処理部である。部分テンプレート抽出部130は、部分テンプレートのデータを部分テンプレート記憶部140に格納する。
【0021】
ここで、部分テンプレート抽出部130の処理について説明する。まず、部分テンプレート抽出部130は、入力部105aから時刻を取得し、時刻に対応する画像データを入力画像記憶部120から検出する。以下の説明において、この検出した画像データをテンプレート画像と表記する。部分テンプレート抽出部130は、テンプレート画像を表示部105bに表示させ、追尾対象となる物体の領域を、入力部105aから取得する。
【0022】
部分テンプレート抽出部130は、テンプレート画像内の追尾対象となる物体の領域から、部分テンプレートを抽出する。例えば、部分テンプレート抽出部130は、Harrisコーナー等のコーナー検出法に基づいて、テンプレート画像から部分テンプレートを抽出する。Harrisコーナーは、文献(C. Harris and M. Stephens,(1988) "A combined corner and edge detector". Proceedings of the 4th Alvey Vision Conference. pp. 147−151.)に開示されている。
【0023】
コーナー検出法を用いて、部分テンプレートを抽出する処理の一例について説明する。部分テンプレート抽出部130は、追尾対象となる物体の領域を、複数の部分領域に分割する。部分テンプレート抽出部130は、部分領域がある局所近傍で方向の異なる2つの際立ったエッジが存在するコーナー点を含んでいるか否かを判定する。部分テンプレート抽出部130は、コーナー点を含んでいる部分領域の画像を、部分テンプレートとして抽出する。部分テンプレート抽出部130は、部分テンプレートを部分テンプレート記憶部140に記憶する。
【0024】
図2Aは、部分テンプレートの抽出結果の一例を示す図である。図2Aの画像60は、テンプレート画像に対応する。図2Aに示す例では、部分テンプレート1〜6が抽出された場合を示している。
【0025】
部分テンプレート記憶部140は、部分テンプレートのデータを記憶する記憶装置である。図2Bは、部分テンプレート記憶部のデータ構造の一例を示す図である。図2Bに示すように、部分テンプレート記憶部140は、部分テンプレート番号と、部分テンプレート座標と、部分テンプレート画像とを対応づけて記憶している。ここで、部分テンプレート座標は、部分テンプレートの中心座標である。部分テンプレート画像は、部分テンプレートの画像データである。
【0026】
相関値算出部150は、画像データの各領域と部分テンプレートとの相関値を算出する処理部である。相関値算出部150は、画像データと、該画像データの各領域と部分テンプレートとの相関値データを、仮説領域抽出部160に出力する。
【0027】
例えば、相関値算出部150は、式(1)を利用して、相関値Vを算出する。式(1)において、Rは、部分テンプレートの各画素の輝度に対応する。Sは、部分テンプレートの領域と重なる、画像データの領域の各画素の輝度に対応する。なお、式(1)に含まれるΣ1は、部分テンプレートに含まれる画素の数に対応する。
【0028】
【数1】
【0029】
相関値算出部150は、画像データの領域上で、部分テンプレートの位置を順次移動させ、式(1)を利用して、領域毎の相関値Vを算出する。部分テンプレート記憶部140には、複数の部分テンプレートが格納されている。相関値算出部150は、部分テンプレートを部分テンプレート記憶部140から順次取得し、部分テンプレート毎に相関値を算出する。部分テンプレート毎の相関値の情報を相関値データと表記する。
【0030】
図3は、相関値データのデータ構造の一例を示す図である。図3に示すように、この相関値データは、部分テンプレート番号と相関値とを対応づけている。部分テンプレート番号は、部分テンプレートを識別する番号である。相関値は、座標毎の部分テンプレートとの画像データとの相関値を示す。ここで、座標は、相関値を算出した領域の中心座標に対応する。
【0031】
仮説領域抽出部160は、相関データを基にして、部分テンプレートに類似する画像データ上の領域を仮説領域として抽出する処理部である。仮説領域抽出部160は、仮説領域データを全体仮説生成部170に出力する。
【0032】
仮説領域抽出部160が、仮説領域を抽出する処理について説明する。仮説領域抽出部160は、部分テンプレート毎に、相関値が極大点をとる座標を判定する。そして、仮説領域抽出部160は、相関値が極大となる座標のうち、この極大値が所定の閾値を超える座標を、仮説領域として抽出する。仮説領域抽出部160は、単一の部分テンプレートに対して、所定の閾値を超える極大値が複数存在する場合には、各極大値をとる座標を仮説領域とする。
【0033】
図4A〜図4Fは、部分テンプレートと仮説領域との対応を示す図である。図4Aにおいて、画像60は、テンプレート画像であり、画像70は、画像データである。部分テンプレート1と、画像70の各領域との相関値が、領域1aにおいて極大となり、極大値が所定の閾値を超えるものとする。この場合には、仮説領域抽出部160は、領域1aを、部分テンプレート1の仮説領域1aとして抽出する。
【0034】
図4Bにおいて、部分テンプレート2と、画像70の各領域との相関値が、領域2a、2bにおいて極大となり、極大値が所定の閾値を超えるものとする。この場合には、仮説領域抽出部160は、領域2a、2bを、部分テンプレート2の仮説領域2a、2bとして抽出する。
【0035】
図4Cにおいて、部分テンプレート3と、画像70の各領域との相関値が、領域3a、3bにおいて極大となり、極大値が所定の閾値を超えるものとする。この場合には、仮説領域抽出部160は、領域3a、3bを、部分テンプレート3の仮説領域3a、3bとして抽出する。
【0036】
図4Dにおいて、部分テンプレート4と、画像70の各領域との相関値が、領域4aにおいて極大となり、極大値が所定の閾値を超えるものとする。この場合には、仮説領域抽出部160は、領域4aを、部分テンプレート4の仮説領域4aとして抽出する。
【0037】
図4Eにおいて、部分テンプレート5と、画像70の各領域との相関値が、領域5aにおいて極大となり、極大値が所定の閾値を超えるものとする。この場合には、仮説領域抽出部160は、領域5aを、部分テンプレート5の仮説領域5aとして抽出する。
【0038】
図4Fにおいて、部分テンプレート6と、画像70の各領域との相関値が、領域6aにおいて極大となり、極大値が所定の閾値を超えるものとする。この場合には、仮説領域抽出部160は、領域6aを、部分テンプレート6の仮説領域6aとして抽出する。
【0039】
仮説領域抽出部160は、部分テンプレートと、部分テンプレートに対応する仮説領域の座標とを対応づけた仮説領域データを生成する。図5は、仮説領域データのデータ構造の一例を示す図である。図5に示すように、この仮説領域データは、部分テンプレート番号と、仮説領域番号、仮説領域座標、相関値とを対応づけている。例えば、図5の1段目に示す例では、部分テンプレート番号「1」に対応する仮説領域番号は「1a」である。そして、仮説領域座標が「20、50」であり、部分テンプレートと仮説領域との相関値が「0.8」である旨が登録されている。なお、仮説領域座標を中心とする所定の大きさの矩形内領域が、仮説領域に対応する。
【0040】
図5に示す例では、部分テンプレート番号1、4〜6の部分テンプレートには、単一の仮説領域が存在しているため、単一の仮説領域番号と仮説領域座標と相関値との組が存在する。部分テンプレート番号2、3の部分テンプレートには、2つの仮説領域が存在するため、2つの仮説領域番号と仮説領域座標と相関値との組が存在する。
【0041】
全体仮説生成部170は、仮説領域データを基にして、部分テンプレートに対応する各仮説領域を組み合わせることで、全体仮説データを生成する処理部である。ただし、全体仮説生成部170は、同一の部分テンプレートに属する仮説領域の組み合わせを除く。また、全体仮説生成部170は、仮説領域を組み合わせた場合に、重複する組み合わせを削除する。
【0042】
ここで、重複する組み合わせとは、実質同一の仮説領域が複数存在する組み合わせを意味する。例えば、図4Bおよび図4Cにおいて、仮説領域2aと仮説領域3aとは、実質同一の仮説領域である。また、仮説領域2bと、仮説領域3bとは実質同一の仮説領域である。異なる部分テンプレートが、同一の仮説領域に一致することはない。このため、全体仮説生成部170は、実質同一の仮説領域が複数存在する組み合わせを削除する。
【0043】
なお、全体仮説生成部170は、各仮説領域の座標を比較して、実質同一の仮説領域であるか否かを判定する。座標が一致する場合には、各仮説領域は、実質同一の仮説領域となる。
【0044】
全体仮説生成部170の処理について説明する。図6は、全体仮説の処理を説明するための図である。部分テンプレート1に対応する仮説領域が1個、部分テンプレート2に対応する仮説領域が2個、部分テンプレート3に対応する仮説領域が2個存在する。また、部分テンプレート4に対応する仮説領域が1個、部分テンプレート5に対応する仮説領域が1個、部分テンプレート6に対応する仮説領域が1個である。このため、重複の有無を条件とせず、各仮説領域を組み合わせると、図6に示すように4種類の組み合わせが生成される。各組み合わせをそれぞれ全体仮説81〜84とする。
【0045】
全体仮説生成部170は、全体仮説81〜84を参照し、同一の全体仮説に、実質同一の仮説領域が含まれているか否かを判定する。実質同一の仮説領域は、仮説領域2aおよび仮説領域3aと、仮説領域2bおよび仮説領域3bである。全体仮説81〜84のうち、全体仮説81は、仮説領域2a、3aを有しているので、重複する組み合わせである。また、全体仮説84は、仮説領域2b、3bを有しているので、重複する組み合わせである。このため、全体仮説生成部170は、全体仮説81、84を削除する。
【0046】
全体仮説生成部170は、重複する全体仮説を削除した全体仮説を含む全体仮説データを生成し、全体仮説データを全体仮説評価部180に出力する。図7は、全体仮説データのデータ構造の一例を示す図である。図7に示すように、全体仮説番号と、部分テンプレート番号と、仮説領域番号と、仮説領域座標と、相関値とを対応づけている。全体仮説番号は、全体仮説を識別する番号である。部分テンプレート番号、仮説領域番号、仮説領域座標、相関値に関する説明は、上記のものと同様である。
【0047】
全体仮説評価部180は、全体仮説に含まれる各仮説領域の相関値、および、推定パラメータによる理論的な仮説領域の座標と実際の仮説領域の座標との誤差から、各全体仮説を評価し、最適な全体仮説を判定する処理部である。
【0048】
まず、全体仮説評価部180が、理論的な仮説領域の座標を求める処理について説明する。全体仮説評価部180は、部分パラメータの座標から全体仮説に含まれる仮説領域の座標への変換式(2)を求める。ここでは、部分パラメータの座標を(x、y)とし、仮説領域の座標を(x’、y’)とする。
【0049】
【数2】
【0050】
式(2)において、a1、b1、c1、d1、e1、f1は、アフィン変換パラメータである。例えば、全体仮説評価部180は、最小2乗法を利用してアフィン変換パラメータを推定する。本実施例では、部分テンプレートの座標(x、y)と仮想領域の座標(x’、y’)との組が、6組存在する。各組をそれぞれ「(x1、y1)、(x’1、y’1)」、「(x2、y2)、(x’2、y’2)」、「(x3、y3)、(x’3、y’3)」、「(x4、y4)、(x’4、y’4)」とする。また、「(x5、y5)、(x’5、y’5)」、「(x6、y6)、(x’6、y’6)」とする。
【0051】
上記の式(2)に、各組の値を代入することで、以下の12個の式(3)〜(14)が得られる。
【0052】
x’1=a1x1+b1y1+e1・・・(3)
【0053】
x’2=a1x2+b1y2+e1・・・(4)
【0054】
x’3=a1x3+b1y3+e1・・・(5)
【0055】
x’4=a1x4+b1y4+e1・・・(6)
【0056】
x’5=a1x5+b1y5+e1・・・(7)
【0057】
x’6=a1x6+b1y6+e1・・・(8)
【0058】
y’1=c1x1+d1y1+f1・・・(9)
【0059】
y’2=c1x2+d1y2+f1・・・(10)
【0060】
y’3=c1x3+d1y3+f1・・・(11)
【0061】
y’4=c1x4+d1y4+f1・・・(12)
【0062】
y’5=c1x5+d1y5+f1・・・(13)
【0063】
y’6=c1x6+d1y6+f1・・・(14)
【0064】
このうち、式(3)〜式(8)は、式(15)、式(16)、式(17)を用いると、式(18)で表すことができる。
【0065】
【数3】
【0066】
【数4】
【0067】
【数5】
【0068】
Y1=X1β1・・・(18)
【0069】
式(18)のβ1の最小2乗推定値は、式(19)であることから、アフィン変換パラメータ(a1、b1、e1)が求まる。
【0070】
【数6】
【0071】
一方、式(9)〜式(14)は、式(20)、式(21)、式(22)を用いると、式(23)で表すことができる。
【0072】
【数7】
【0073】
【数8】
【0074】
【数9】
【0075】
Y2=X2β2・・・(23)
【0076】
式(23)のβ2の最小2乗推定値は、式(24)であることから、アフィン変換パラメータ(c1、d1、f1)が求まる。
【0077】
【数10】
【0078】
全体仮説評価部180は、上記アフィン変換パラメータを求めた後に、式(2)に部分テンプレートの座標を代入することで、理論的な仮説領域の座標を算出する。図8は、部分テンプレートの座標と理論的な仮説領域の座標との関係を示す図である。例えば、図8
の1段目では、部分テンプレート座標(10、30)を、式(2)に代入することにより、理論的な仮説領域座標(23、50)が求められる。その他の理論的な仮説領域座標も、部分テンプレート座標を代入することで求められる。
【0079】
全体仮説評価部180は、部分テンプレートに対応する理論的な仮説領域の座標を求めた後に、この理論的な仮説領域の座標と、実際の仮説領域の座標との誤差を算出する。全体仮説評価部180は、同一の部分テンプレート番号に対応する理論的な座標と、実際の仮説領域の座標との誤差を求める。一例として、同一の部分テンプレート番号に対応する理論的な座標と、実際の仮説領域の座標のユーグリッド距離を誤差として採用してもよい。
【0080】
一例として、全体仮説82の仮説領域番号1aの誤差を求める場合について説明する。図7、図8を参照する。仮説領域番号1aの仮説領域座標は、(20、50)である。この仮説領域番号1aの仮説領域座標が、実際の仮説領域の座標に対応する。また、仮説領域番号1aに対応する部分テンプレート番号は「1」であり、この部分テンプレートの座標から求められる理論的な仮説領域の座標は(23、50)である。例えば、誤差を座標間の距離とすると、理論的な仮説領域の座標(23、50)と、実際の仮説領域の座標(20、50)との誤差は「3」となる。全体仮説評価部180は、他の誤差も算出する。
【0081】
全体仮説評価部180は、各誤差を求めた後に、評価基準データを生成する。図9は、評価基準データの一例を示す図である。図9に示すように、評価基準データは、全体仮説番号、部分テンプレート番号、仮説領域番号、仮説領域座標、相関値、誤差を対応づけている。図9に示すように、全体仮説番号の仮説領域番号毎に、誤差が登録されている。例えば、全体仮説番号82の各仮説領域番号1a、2b、3a、4a、5a、6aの誤差は3、−19、19、−3、2、−2となる。また、全体仮説番号83の各仮説領域番号1a、2a、3b、4a、5a、6aの誤差は全て0となる。なお、図9の全体仮説番号、部分テンプレート番号、仮説領域番号、仮説領域座標、相関値に関する説明は、図7のものと同様である。
【0082】
全体仮説評価部180は、評価基準データを基にして、各全体仮説の評価値を算出する。全体仮説評価部180は、全体仮説に含まれる仮説領域毎に、スコアを算出し、スコアを合計することで、該当する全体仮説の評価値を算出する。全体仮説評価部180は、式(25)に基づいて、スコアを算出する。式(25)において、αおよびβは、重みに関する係数である。ここでは一例として、αの値を0.1、βの値を1とする。また、誤差の値は絶対値を用いる。
【0083】
Score=α×誤差+β×(1.0−相関値)・・・(25)
【0084】
全体仮説評価部180は、式(25)に基づいて、全体仮説番号82、83に対応する全体仮説の評価値を算出する。そうすると、全体仮説番号82に対応する全体仮説の評価値が「5.73」となる。また、全体仮説番号83に対応する全体仮説の評価値が「1.17」となる。
【0085】
全体仮説評価部180は、各全体仮説に対応する評価値のうち、最小となる全体仮説番号を選択する。全体仮説評価部180は、各全体仮説の評価値を比較すると、全体仮説番号83に対応する全体仮説の評価値が最小となる。このため、全体仮説評価部180は、全体仮説番号83の全体仮説を選択する。全体仮説評価部180が、選択した全体仮説が、最適な全体仮説となる。
【0086】
全体仮説評価部180は、最適な全体仮説を判定した後に、追尾情報を生成する。例えば、全体仮説評価部180は、判定した全体仮説に含まれる各仮説領域の座標の重心を算出し、算出した重心の座標を追尾情報とする。全体仮説評価部180は、生成した追尾情報を、各種処理装置に出力する。各種処理装置は、追尾情報を基にして、追尾対象となる物体の画像上での座標を把握し、各種処理を行う。例えば、各種処理装置は、追尾情報を基にして、追尾対象となる物体と枠とを重畳表示し、視認性を高める。
【0087】
次に、本実施例の画像処理装置100の処理手順について説明する。図10は、画像処理装置の処理手順を示すフローチャートである。例えば、図10に示す処理は、カメラ部110によって撮影された画像の画像データが、入力画像記憶部120に記憶されたことを契機にして実行される。図10に示すように、画像処理装置100は、画像データを格納し(ステップS101)、部分テンプレートを抽出する(ステップS102)。画像処理装置100は、追尾情報生成処理を実行し(ステップS103)、追尾対象の座標を判定する(ステップS104)。
【0088】
次に、図10のステップS103に示した追尾情報生成処理について説明する。図11は、追尾情報生成処理の処理手順を示すフローチャートである。図11に示すように、画像処理装置100は、部分テンプレート番号Tに1を設定し(ステップS201)、部分テンプレート番号Tの部分テンプレートと画像データとを基にして、相関演算し、各領域での相関値を計算する(ステップS202)。
【0089】
画像処理装置100は、相関値が極大かつ閾値を超える領域を、仮説領域に設定し(ステップS203)、部分テンプレート番号Tに1を加算する(ステップS204)。画像処理装置100は、全ての部分テンプレートの相関値を求めていない場合には(ステップS205,No)、ステップS202に移行する。
【0090】
画像処理装置100は、全ての部分テンプレートの相関値を求めた場合には(ステップS205,Yes)、各仮説領域を組み合わせ、全体仮説を構築する(ステップS206)。画像処理装置100は、全体仮説番号Aを初期値に設定する(ステップS207)。
【0091】
画像処理装置100は、全体仮説の中に、部分テンプレートの移動先同士の距離が閾値Dth以下のものが存在するかを判定する(ステップS208)。画像処理装置100は、閾値Dth以下のものが存在しない場合には(ステップS208,No)、ステップS210に移行する。
【0092】
一方、画像処理装置100は、閾値Dth以下のものが存在する場合には(ステップS208,Yes)、該当する全体仮説を除去する(ステップS209)。画像処理装置100は、次の全体仮説番号Aを設定し(ステップS210)、全ての全体仮説番号Aについて、ステップS208の処理を行ったか否かを判定する(ステップS211)。
【0093】
画像処理装置100は、全ての全体仮説番号Aについて処理を行っていない場合には(ステップS211,No)、ステップS208に移行する。一方、画像処理装置100は、全ての全体仮説番号Aについて処理を行った場合には(ステップS211,Yes)、全体仮説番号Aを初期値に設定する(ステップS212)。
【0094】
画像処理装置100は、評価値算出処理を実行し(ステップS213)、次の全体仮説番号Aを設定する(ステップS214)。画像処理装置100は、全ての全体仮説番号AについてステップS213の処理を行ったか否かを判定する(ステップS215)。
【0095】
画像処理装置100は、全ての全体仮説番号Aについて処理を行っていない場合には(ステップS215,No)、ステップS213に移行する。一方、画像処理装置100は、全ての全体仮説番号Aについて処理を行った場合には(ステップS215,Yes)、全体仮説の評価値が最小となるものを選択して追尾情報を生成する(ステップS216)。
【0096】
次に、図11のステップS213に示した評価値算出処理の処理手順について説明する。図12は、評価値算出処理の処理手順を示すフローチャートである。図12に示すように、画像処理装置100は、最小2乗法を基にして、アフィン変換パラメータを推定する(ステップS301)。
【0097】
画像処理装置100は、部分テンプレート番号Tを1に設定し(ステップS302)、仮説領域と、アフィン変換パラメータを用いて計算した理論的な仮説領域との誤差を算出する(ステップS303)。
【0098】
画像処理装置100は、誤差と相関値とを基にして、部分テンプレートのスコアを算出し(ステップS304)、部分テンプレート番号に1を加算する(ステップS305)。画像処理装置100は、全ての部分テンプレートのスコアを求めたか否かを判定する(ステップS306)。
【0099】
画像処理装置100は、全ての部分テンプレートのスコアを求めていない場合には(ステップS306,No)、ステップS303に移行する。一方、画像処理装置100は、全ての部分テンプレートのスコアを求めた場合には(ステップS306,Yes)、全部分テンプレートのスコアの総和を、全体仮説の評価値に設定する(ステップS307)。
【0100】
次に、本実施例にかかる画像処理装置100の効果について説明する。画像処理装置100は、部分プレートと画像データとマッチングして、追尾対象の各部分の移動先の候補を、仮説領域として抽出する。そして、画像処理装置100は、各仮説領域を重複しないように組み合わせ、組み合わせの評価値に基づいて、最適な組み合わせを選択する。このため、追跡対象の物体に類似する領域が複数存在し、類似する領域を部分テンプレートとした場合であっても、可能性の低い組み合わせを評価値に基づいて排除でき、安定した追尾処理を行うことができる。
【0101】
また、画像処理装置100は、部分テンプレートの座標と、仮説領域との関係からアフィン変換パラメータを求める。そして、画像処理装置100は、アフィン変換パラメータから導かれる理論的な座標と、全体仮説に含まれる仮説領域の座標との誤差を基にして、全体仮説の評価値を算出する。このため、理論的に相応しくない仮説領域を多く含む全体仮説を排除できる。
【0102】
また、画像処理装置100は、上記の誤差に加えて、部分テンプレートの相関値を利用して、全体仮説の評価値を算出する。このため、全体仮説の評価値の信頼度をより高めることができ、全体仮説の選択処理の精度が向上する。
【0103】
ところで、画像処理装置100の各構成要素は機能概念的なものであり、必ずしも物理的に図示の如く構成されていることを要しない。すなわち、画像処理装置100の分散、統合の具体的形態は図示のものに限られず、その全部または一部を、各種の負荷や使用状況などに応じて、任意の単位で機能的または物理的に分散・統合して構成することができる。例えば、画像処理装置100は、ネットワークを介して外部のカメラと接続し、画像データを取得してもよい。
【0104】
また、部分テンプレート抽出部130は、追尾対象となる物体の領域を、入力部105aから取得し、取得した領域内の画像から部分テンプレートを抽出していたがこれに限定されるものではない。例えば、部分テンプレート130は、追尾対象となる物体の画像データを保持しておき、この画像データと、テンプレート画像とをマッチングして、追尾対象となる物体の領域を自動的に判定してもよい。また、利用者は、入力部105aを操作して、部分テンプレートを指定してもよい。
【0105】
また、画像処理装置100は、既存のPC(Personal Computer)などの情報処理装置に、画像処理装置100の各機能を搭載することによって実現することもできる。
【0106】
図13は、実施例にかかる画像処理装置を構成するコンピュータのハードウェア構成を示す図である。図13に示すように、このコンピュータ200は、各種演算処理を実行するCPU(Central Processing Unit)201と、ユーザからのデータの入力を受け付ける入力装置202と、ディスプレイ203とを有する。また、コンピュータ200は、記憶媒体からプログラム等を読み取る読み取り装置204と、ネットワークを介して他の装置と通信を行うインターフェース装置205、画像を撮影するカメラ206とを有する。また、コンピュータ200は、各種情報を一時記憶するRAM(Random Access Memory)207と、ハードディスク装置208とを有する。各装置201〜208は、バス209に接続される。
【0107】
ハードディスク装置208は、部分テンプレート抽出プログラム208a、相関値算出プログラム208b、仮説領域抽出プログラム208c、全体仮説生成プログラム208d、全体仮説評価プログラム208eを記憶する。
【0108】
CPU201は、ハードディスク装置208に記憶された各プログラム208a〜208eを読み出して、RAM207に展開する。これにより、部分テンプレート抽出プログラム208aは、部分テンプレート抽出プロセス207aとして機能する。相関値算出プログラム208bは、相関値算出プロセス207bとして機能する。仮説領域抽出プログラム208cは、仮説領域抽出プロセス207cとして機能する。全体仮説生成プログラム208dは、全体仮説生成プロセス207dとして機能する。全体仮説評価プログラム208eは、全体仮説評価プロセス207eとして機能する。
【0109】
部分テンプレート抽出プロセス207aは、図1の部分テンプレート抽出部130に対応する。相関値算出プロセス207bは、図1の相関値算出部150に対応する。仮説領域抽出プロセス207cは、図1の仮説領域抽出部160に対応する。全体仮説生成プロセス207dは、全体仮説生成部170に対応する。全体仮説評価プロセス207eは、図1の全体仮説評価部180に対応する。CPU201は、各プロセス207a〜207eにより、画像データの所定の物体を追従する。
【0110】
なお、上記のプログラム208a〜208eは、必ずしもハードディスク装置208に格納されている必要はない。例えば、CD−ROM等の記憶媒体に記憶されたプログラム208a〜208eを、コンピュータ200が読み出して実行するようにしてもよい。また、公衆回線、インターネット、LAN(Local Area Network)、WAN(Wide Area Network)等に接続された記憶装置に、各プログラム208a〜208bを記憶させておいてもよい。この場合、コンピュータ200がこれらから各プログラム208a〜208eを読み出して実行するようにしてもよい。
【0111】
なお、図1に示した各記憶装置120、140は、例えば、RAM(Random Access Memory)、ROM(Read Only Memory)、フラッシュメモリ(Flash Memory)などの半導体メモリ素子、またはハードディスク、光ディスクなどの記憶装置に対応する。
【0112】
また、図1に示した各処理部130、150〜180は、ASIC(Application Specific Integrated Circuit)や、FPGA(Field Programmable Gate Array)などの集積装置に対応する。また、各処理部130、150〜180は、例えば、CPUやMPU(Micro Processing Unit)等の電子回路に対応する。
【0113】
以上の各実施例を含む実施形態に関し、さらに以下の付記を開示する。
【0114】
(付記1)追尾対象となる物体の各局所部分の画像を含む複数の部分テンプレートと、カメラが撮影したカメラ画像とを比較して、部分テンプレートとカメラ画像内の各領域との相関値を算出する相関値算出部と、
前記相関値に基づいて、前記部分テンプレートに類似する前記カメラ画像内の領域を仮説領域として複数抽出する仮説領域抽出部と、
複数の仮説領域を重複しないように組み合わせた複数の全体仮説情報を生成する全体仮説生成部と、
前記複数の全体仮説情報について、それぞれの評価値を算出し、各評価値に基づいて複数の全体仮説情報から単一の全体仮説情報を選択する全体仮説評価部と
を有することを特徴とする画像処理装置。
【0115】
(付記2)前記全体仮説評価部は、前記部分テンプレートの座標と前記仮説領域の座標との関係からアフィン変換パラメータを求め、該アフィン変換パラメータから導かれる座標と、前記仮説領域の座標との誤差を基にして、前記全体仮説情報の評価値を算出することを特徴とする付記1に記載の画像処理装置。
【0116】
(付記3)前記全体仮説評価部は、部分テンプレートの相関値を更に利用して、前記全体仮説情報の評価値を算出することを特徴とする付記2に記載の画像処理装置。
【0117】
(付記4)コンピュータが実行する画像処理方法であって、
追尾対象となる物体の各局所部分の画像を含む複数の部分テンプレートと、カメラが撮影したカメラ画像とを比較して、部分テンプレートとカメラ画像内の各領域との相関値を算出し、
前記相関値に基づいて、前記部分テンプレートに類似する前記カメラ画像内の領域を仮説領域として複数抽出し、
複数の仮説領域を重複しないように組み合わせた複数の全体仮説情報を生成し、
前記複数の全体仮説情報について、それぞれの評価値を算出し、各評価値に基づいて複数の全体仮説情報から単一の全体仮説情報を選択することを特徴とする画像処理方法。
【0118】
(付記5)前記部分テンプレートの座標と前記仮説領域の座標との関係からアフィン変換パラメータを求め、該アフィン変換パラメータから導かれる座標と、前記仮説領域の座標との誤差を基にして、前記全体仮説情報の評価値を算出することを特徴とする付記4に記載の画像処理方法。
【0119】
(付記6)部分テンプレートの相関値を更に利用して、前記全体仮説情報の評価値を算出することを特徴とする付記5に記載の画像処理方法。
【0120】
(付記7)コンピュータに、
追尾対象となる物体の各局所部分の画像を含む複数の部分テンプレートと、カメラが撮影したカメラ画像とを比較して、部分テンプレートとカメラ画像内の各領域との相関値を算出し、
前記相関値に基づいて、前記部分テンプレートに類似する前記カメラ画像内の領域を仮説領域として複数抽出し、
複数の仮説領域を重複しないように組み合わせた複数の全体仮説情報を生成し、
前記複数の全体仮説情報について、それぞれの評価値を算出し、各評価値に基づいて複数の全体仮説情報から単一の全体仮説情報を選択する処理を実行させる画像処理プログラム。
【0121】
(付記8)前記部分テンプレートの座標と前記仮説領域の座標との関係からアフィン変換パラメータを求め、該アフィン変換パラメータから導かれる座標と、前記仮説領域の座標との誤差を基にして、前記全体仮説情報の評価値を算出することを特徴とする付記7に記載の画像処理プログラム。
【0122】
(付記9)部分テンプレートの相関値を更に利用して、前記全体仮説情報の評価値を算出することを特徴とする付記8に記載の画像処理プログラム。
【符号の説明】
【0123】
110 カメラ部
120 入力画像記憶部
130 部分テンプレート抽出部
140 部分テンプレート記憶部
150 相関値算出部
160 仮説領域抽出部
170 全体仮説生成部
180 全体仮説評価部
【特許請求の範囲】
【請求項1】
追尾対象となる物体の各局所部分の画像を含む複数の部分テンプレートと、カメラが撮影したカメラ画像とを比較して、部分テンプレートとカメラ画像内の各領域との相関値を算出する相関値算出部と、
前記相関値に基づいて、前記部分テンプレートに類似する前記カメラ画像内の領域を仮説領域として複数抽出する仮説領域抽出部と、
複数の仮説領域を重複しないように組み合わせた複数の全体仮説情報を生成する全体仮説生成部と、
前記複数の全体仮説情報について、それぞれの評価値を算出し、各評価値に基づいて複数の全体仮説情報から単一の全体仮説情報を選択する全体仮説評価部と
を有することを特徴とする画像処理装置。
【請求項2】
前記全体仮説評価部は、前記部分テンプレートの座標と前記仮説領域の座標との関係からアフィン変換パラメータを求め、該アフィン変換パラメータから導かれる座標と、前記仮説領域の座標との誤差を基にして、前記全体仮説情報の評価値を算出することを特徴とする請求項1に記載の画像処理装置。
【請求項3】
前記全体仮説評価部は、部分テンプレートの相関値を更に利用して、前記全体仮説情報の評価値を算出することを特徴とする請求項2に記載の画像処理装置。
【請求項4】
コンピュータが実行する画像処理方法であって、
追尾対象となる物体の各局所部分の画像を含む複数の部分テンプレートと、カメラが撮影したカメラ画像とを比較して、部分テンプレートとカメラ画像内の各領域との相関値を算出し、
前記相関値に基づいて、前記部分テンプレートに類似する前記カメラ画像内の領域を仮説領域として複数抽出し、
複数の仮説領域を重複しないように組み合わせた複数の全体仮説情報を生成し、
前記複数の全体仮説情報について、それぞれの評価値を算出し、各評価値に基づいて複数の全体仮説情報から単一の全体仮説情報を選択することを特徴とする画像処理方法。
【請求項5】
コンピュータに、
追尾対象となる物体の各局所部分の画像を含む複数の部分テンプレートと、カメラが撮影したカメラ画像とを比較して、部分テンプレートとカメラ画像内の各領域との相関値を算出し、
前記相関値に基づいて、前記部分テンプレートに類似する前記カメラ画像内の領域を仮説領域として複数抽出し、
複数の仮説領域を重複しないように組み合わせた複数の全体仮説情報を生成し、
前記複数の全体仮説情報について、それぞれの評価値を算出し、各評価値に基づいて複数の全体仮説情報から単一の全体仮説情報を選択する処理を実行させる画像処理プログラム。
【請求項1】
追尾対象となる物体の各局所部分の画像を含む複数の部分テンプレートと、カメラが撮影したカメラ画像とを比較して、部分テンプレートとカメラ画像内の各領域との相関値を算出する相関値算出部と、
前記相関値に基づいて、前記部分テンプレートに類似する前記カメラ画像内の領域を仮説領域として複数抽出する仮説領域抽出部と、
複数の仮説領域を重複しないように組み合わせた複数の全体仮説情報を生成する全体仮説生成部と、
前記複数の全体仮説情報について、それぞれの評価値を算出し、各評価値に基づいて複数の全体仮説情報から単一の全体仮説情報を選択する全体仮説評価部と
を有することを特徴とする画像処理装置。
【請求項2】
前記全体仮説評価部は、前記部分テンプレートの座標と前記仮説領域の座標との関係からアフィン変換パラメータを求め、該アフィン変換パラメータから導かれる座標と、前記仮説領域の座標との誤差を基にして、前記全体仮説情報の評価値を算出することを特徴とする請求項1に記載の画像処理装置。
【請求項3】
前記全体仮説評価部は、部分テンプレートの相関値を更に利用して、前記全体仮説情報の評価値を算出することを特徴とする請求項2に記載の画像処理装置。
【請求項4】
コンピュータが実行する画像処理方法であって、
追尾対象となる物体の各局所部分の画像を含む複数の部分テンプレートと、カメラが撮影したカメラ画像とを比較して、部分テンプレートとカメラ画像内の各領域との相関値を算出し、
前記相関値に基づいて、前記部分テンプレートに類似する前記カメラ画像内の領域を仮説領域として複数抽出し、
複数の仮説領域を重複しないように組み合わせた複数の全体仮説情報を生成し、
前記複数の全体仮説情報について、それぞれの評価値を算出し、各評価値に基づいて複数の全体仮説情報から単一の全体仮説情報を選択することを特徴とする画像処理方法。
【請求項5】
コンピュータに、
追尾対象となる物体の各局所部分の画像を含む複数の部分テンプレートと、カメラが撮影したカメラ画像とを比較して、部分テンプレートとカメラ画像内の各領域との相関値を算出し、
前記相関値に基づいて、前記部分テンプレートに類似する前記カメラ画像内の領域を仮説領域として複数抽出し、
複数の仮説領域を重複しないように組み合わせた複数の全体仮説情報を生成し、
前記複数の全体仮説情報について、それぞれの評価値を算出し、各評価値に基づいて複数の全体仮説情報から単一の全体仮説情報を選択する処理を実行させる画像処理プログラム。
【図1】

【図2A】
【図2B】
【図3】
【図4A】
【図4B】
【図4C】
【図4D】
【図4E】
【図4F】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図2A】
【図2B】
【図3】
【図4A】
【図4B】
【図4C】
【図4D】
【図4E】
【図4F】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【公開番号】特開2012−185655(P2012−185655A)
【公開日】平成24年9月27日(2012.9.27)
【国際特許分類】
【出願番号】特願2011−47971(P2011−47971)
【出願日】平成23年3月4日(2011.3.4)
【出願人】(000005223)富士通株式会社 (25,993)
【Fターム(参考)】
【公開日】平成24年9月27日(2012.9.27)
【国際特許分類】
【出願日】平成23年3月4日(2011.3.4)
【出願人】(000005223)富士通株式会社 (25,993)
【Fターム(参考)】
[ Back to top ]