
画像処理装置、画像処理方法
【課題】 複合現実空間を観察する観察者が装着する表示装置や、別個に設けられた表示装置に対して提供する画像を、観察者の操作を介することなく適宜切り替える為の技術を提供すること。
【解決手段】 三次元CGソフト101は、仮想空間の画像を生成し、画像出力部102は、この画像をHMD107に対して出力する。自動モード切替部200は、HMD107が使用状態にあるか否かを判断し、HMD107が使用状態にある場合には、三次元CGソフト101を動作させる。
【解決手段】 三次元CGソフト101は、仮想空間の画像を生成し、画像出力部102は、この画像をHMD107に対して出力する。自動モード切替部200は、HMD107が使用状態にあるか否かを判断し、HMD107が使用状態にある場合には、三次元CGソフト101を動作させる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、複合現実感提示技術に関するものである。
【背景技術】
【0002】
従来、機械設計の分野では三次元CADシステムが用いられており、機構及び機構の構成部品を立体的に表示しながら設計を行うことが可能になっている。通常、三次元CADシステムでは、表示装置として二次元ディスプレイを利用し、入力装置としてマウスやキーボードを利用するのが一般的である。
【0003】
一方、近年では三次元データを立体的に表示する表示装置が実用化されている。このような表示装置では、視差のついた映像に偏光をかけて表示し、体験者は偏光眼鏡を使って立体を知覚することが可能である。
【0004】
さらに、現実空間に三次元データなどの仮想情報を重畳して提示する複合現実感技術を使った表示装置なども実用化されている。複合現実感の提示を行う表示装置は、例えば次のような構成を有する装置である。即ち、ビデオカメラ等の撮像装置が撮像した現実空間の画像上に、撮像装置の位置及び姿勢に応じて生成した仮想空間の画像(例えばコンピュータグラフィックスにより描画された仮想物体や文字情報等)を重畳描画した画像を表示する装置である。このような装置には、例えば、HMD(ヘッドマウントディスプレイ、頭部装着型表示装置)を用いることができる。また、係る表示装置は、観察者の頭部に装着された光学シースルー型ディスプレイに、観察者の視点の位置及び姿勢に応じて生成した仮想空間の画像を表示する光学シースルー方式によっても実現されている。
【0005】
このように、三次元CADシステムで設計された三次元データを、立体表示可能な表示装置を使って観察するシステムはいくつか存在している。例えば特許文献1がその例である。この方法を用いれば、三次元CADシステムを複合現実感システムとしても利用することが出来る。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2007−299062号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
三次元CADシステムで作成した三次元データを複合現実感システムで観察するシステムでは、観察者の任意の操作に基づいて表示部を切り替えるのが一般的である。例えば、画面上のボタンをマウスでクリックすることで、二次元ディスプレイの表示から複合現実感システムによる表示へと切り替える方法などが一般的である。しかし、通常の三次元CADシステムの操作部(二次元ディスプレイ、マウス、キーボード)による操作と、複合現実感システムでの操作では、操作部や操作方法は異なる。然るに、双方のモードを切り替えるためには、それぞれのシステムで異なる操作法を習得する必要があった。観察者にとっては、システムの操作は出来るだけ簡単な操作が望まれ、出来ることなら双方のモードを自動的に切り替える仕組みが望まれる。
【0008】
本発明は以上の問題に鑑みてなされたものであり、複合現実空間を観察する観察者が装着する表示装置や、別個に設けられた表示装置に対して提供する画像を、観察者の操作を介することなく適宜切り替える為の技術を提供することを目的とする。
【課題を解決するための手段】
【0009】
本発明の目的を達成するために、例えば、本発明の画像処理装置は以下の構成を備える。即ち、仮想空間の画像を生成し、該画像を観察する観察者が装着する表示装置に対して出力する生成手段と、前記表示装置が使用状態にあるか否かを判断する判断手段と、前記表示装置が使用状態にあると前記判断手段が判断した場合に前記生成手段を動作させる制御手段とを備えることを特徴とする。
【発明の効果】
【0010】
本発明の構成によれば、複合現実空間を観察する観察者が装着する表示装置や、別個に設けられた表示装置に対して提供する画像を、観察者の操作を介することなく適宜切り替えることができる。
【図面の簡単な説明】
【0011】
【図1】従来のシステムの構成を示すブロック図。
【図2】HMD107が使用状態ではない場合に三次元CGソフト101に行わせる処理のフローチャート。
【図3】システムの動作を示すフローチャート。
【図4】システムの機能構成例を示すブロック図。
【図5】システムの機能構成例を示すブロック図。
【図6】コンピュータ400に適用可能な装置の構成例を示すブロック図。
【発明を実施するための形態】
【0012】
以下、添付図面を参照し、本発明の好適な実施形態について説明する。なお、以下説明する実施形態は、本発明を具体的に実施した場合の一例を示すもので、特許請求の範囲に記載の構成の具体的な実施例の1つである。
【0013】
[第1の実施形態]
仮想空間の画像と現実空間の画像との合成画像である複合現実空間の画像を生成して観察者に提示するための従来のシステムの構成について、図1のブロック図を用いて説明する。もちろん、複合現実空間の画像を生成して観察者に提示するための構成については様々なものが従来から提案されているが、ここではその一例について触れる。
【0014】
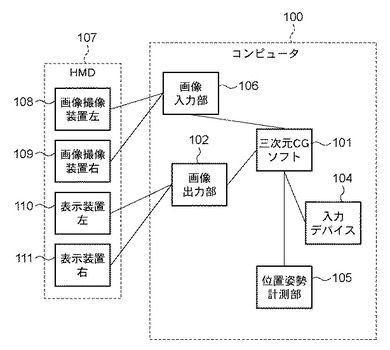
係るシステムは図1に示す如く、HMD107と、コンピュータ100と、で構成されている。HMD107は、HMD107を頭部に装着する観察者の左眼に対応する現実空間の画像を撮像する画像撮像装置左108と、HMD107を頭部に装着する観察者の右眼に対応する現実空間の画像を撮像する画像撮像装置右109と、を有する。画像撮像装置左108及び画像撮像装置右109のそれぞれは、現実空間の動画像を撮像するもので、撮像した各フレームの画像(現実空間の画像)はコンピュータ100に対して送出される。
【0015】
また、HMD107は、HMD107を頭部に装着する観察者の左眼に対して画像を提供する表示装置左110と、HMD107を頭部に装着する観察者の右眼に対して画像を提供する表示装置右111と、を有する。表示装置左110及び表示装置右111のそれぞれは、観察者がHMD107を自身の頭部に装着した場合に、この観察者の左眼、右眼の眼前に位置するようにHMD107に対して取り付けられたものである。表示装置左110には、コンピュータ100から送出される左目用の画像が表示され、表示装置右111には、コンピュータ100から送出される右目用の画像が表示される。これにより、観察者の左眼の眼前には左目用の画像が表示され、右眼の眼前には右目用の画像が表示されることになるので、観察者はそれぞれの目で対応する画像を観察することで、立体視を実現できる。
【0016】
次に、画像処理装置として機能するコンピュータ100について説明する。画像撮像装置左108、画像撮像装置右109のそれぞれから送出された現実空間の画像は画像入力部106が取得し、画像入力部106は取得したそれぞれの現実空間の画像を三次元CGソフト101に供給する。
【0017】
位置姿勢計測部105は、画像撮像装置左108及び画像撮像装置右109の位置姿勢を求めるために必要な情報を収集する。この収集する情報には様々なものが考え得る。
【0018】
例えば、画像撮像装置左108及び画像撮像装置右109は、それらの間の位置関係が固定されたままHMD107に取り付けられているので、一方の画像撮像装置の位置姿勢を計測すれば、他方の画像撮像装置の位置姿勢は計算可能である。然るにこの場合、位置姿勢計測部105は、画像撮像装置左108、画像撮像装置右109の何れか一方の位置姿勢を計測すればよいことになる。
【0019】
また、画像撮像装置左108との位置関係が既知であるHMD107上の1点の位置姿勢を計測すれば、画像撮像装置左108の位置姿勢は計算可能である。これは画像撮像装置右109の場合も同様である。
【0020】
このように、計測対象の位置姿勢さえ計測することができるのであれば、どの部分の位置姿勢を計測し、計測した位置姿勢をどのように用いて画像撮像装置左108及び画像撮像装置右109の位置姿勢を求めるのかについては特に限定するものではない。
【0021】
また、計測対象の位置姿勢の計測方法については従来から様々な方法が提案されており、何れの方法を用いても良い。例えば、磁気センサを用いる場合、計測対象位置に磁気のレシーバを取り付け、現実空間中に配した磁気の発信源からの磁気の変化をこのレシーバにより計測し、計測した磁気の変化から、このレシーバの位置姿勢を求める。また、HMD107の動画像を撮像するカメラを現実空間中に設け、このカメラにより撮像された各フレームの画像から、このHMD107の位置姿勢を推定する方法を用いても良い。
【0022】
このように、本実施形態では、画像撮像装置左108及び画像撮像装置右109の位置姿勢さえ取得することができるのであれば、如何なる技術を採用しても良い。そして採用した技術を実現するための構成が位置姿勢計測部105となる。もちろん、構成によっては、この位置姿勢計測部105は、コンピュータ100の外部に設けても良いし、何らかの装置に組み込んでも良い。
【0023】
何れにせよ、位置姿勢計測部105により取得した位置姿勢は三次元CGソフト101に供給される。そして三次元CGソフト101は、この位置姿勢から、画像撮像装置左108及び画像撮像装置右109の位置姿勢を確定させる。確定させる方法は、上記の通り、計測した位置姿勢がどの部分の位置姿勢であるのかに応じて異なる。
【0024】
三次元CGソフト101は、この確定させた画像撮像装置左108の位置姿勢を有する視点から見える仮想空間の画像を、コンピュータ100内に保持している若しくは外部装置から取得した仮想空間のデータを用いて生成する。そして三次元CGソフト101は、この生成した仮想空間の画像を、画像入力部106から取得した、画像撮像装置左108により撮像された現実空間の画像上に合成することで、左目用の複合現実空間の画像を生成する。同様に、三次元CGソフト101は、この確定させた画像撮像装置右109の位置姿勢を有する視点から見える仮想空間の画像を、上記の仮想空間のデータを用いて生成する。そして三次元CGソフト101は、この生成した仮想空間の画像を、画像入力部106から取得した、画像撮像装置右109により撮像された現実空間の画像上に合成することで、右目用の複合現実空間の画像を生成する。
【0025】
画像出力部102は、三次元CGソフト101が生成した左目用の複合現実空間の画像を表示装置左110に対して送出すると共に、三次元CGソフト101が生成した右目用の複合現実空間の画像を表示装置右111に対して送出する。
【0026】
入力デバイス104は、マウスやキーボードなど、コンピュータ100の操作者がコンピュータ100に対して指示入力を行うために操作するものである。例えば、表示装置左110及び表示装置右111のそれぞれに表示する内容を切り替えるための指示を入力するために使用する。
【0027】
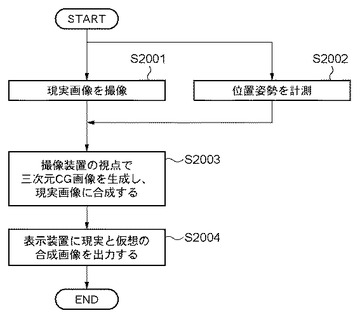
以上説明したシステムの動作について、図3のフローチャートを用いて説明する。ステップS2001では、画像撮像装置左108及び画像撮像装置右109のそれぞれは、左目用の現実空間の画像、右目用の現実空間の画像を撮像し、撮像した画像をコンピュータ100に対して送出する。画像入力部106は、このそれぞれの画像を三次元CGソフト101に供給する。
【0028】
ステップS2001と並行してステップS2002では、位置姿勢計測部105は計測対象の位置姿勢を計測し、計測した位置姿勢を三次元CGソフト101に対して供給する。
【0029】
ステップS2003では、三次元CGソフト101は、位置姿勢計測部105から供給された位置姿勢から、画像撮像装置左108及び画像撮像装置右109の位置姿勢を確定させる。そして三次元CGソフト101は、この確定させた画像撮像装置左108の位置姿勢を有する視点から見える仮想空間の画像を、上記の仮想空間のデータを用いて生成する。そして三次元CGソフト101は、この生成した仮想空間の画像を、画像入力部106から取得した、画像撮像装置左108により撮像された現実空間の画像上に合成することで、左目用の複合現実空間の画像を生成する。同様に、三次元CGソフト101は、この確定させた画像撮像装置右109の位置姿勢を有する視点から見える仮想空間の画像を、上記の仮想空間のデータを用いて生成する。そして三次元CGソフト101は、この生成した仮想空間の画像を、画像入力部106から取得した、画像撮像装置右109により撮像された現実空間の画像上に合成することで、右目用の複合現実空間の画像を生成する。
【0030】
ステップS2004では、画像出力部102は、三次元CGソフト101が生成した左目用の複合現実空間の画像を表示装置左110に送出すると共に、三次元CGソフト101が生成した右目用の複合現実空間の画像を表示装置右111に送出する。
【0031】
以上説明した構成が、複合現実空間を観察者に対して提示するための従来のシステムの構成である。本実施形態では、表示装置左110及び表示装置右111に表示する内容を、HMD107の使用状態に応じて切り替える為の構成をコンピュータ100に加えたシステムについて説明する。
【0032】
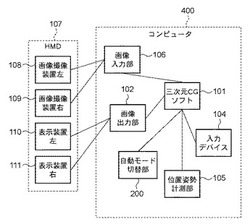
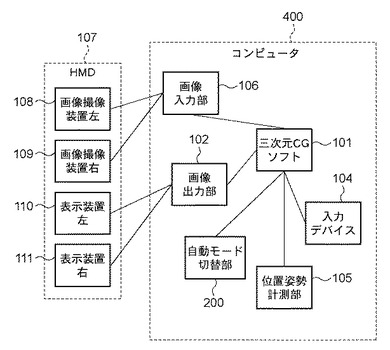
先ず、本実施形態に係るシステムの機能構成例について、図4のブロック図を用いて説明する。図4において図1に示した構成用件と同じ構成用件には同じ参照番号を付しており、その説明は省略する。
【0033】
コンピュータ400には、コンピュータ100が有する構成に加え、自動モード切替部200が搭載されている。自動モード切替部200は、HMD107の状態を監視しており、HMD107が使用状態にあるか否かを判断する。そしてその判断結果に応じて、三次元CGソフト101の動作を許可したり、停止させたりする動作制御を行う。
【0034】
ここで、HMD107の状態の監視には様々なものがある。例えば、自動モード切替部200は、HMD107の電源がオンになっているかオフになっているかを監視する。この監視のタイミングは定期的に行うことが好ましい。そして、自動モード切替部200は、HMD107の電源がオンになっていれば、HMD107は使用状態にあると判断し、HMD107の電源がオフになっていれば、HMD107は使用状態にはないと判断する。
【0035】
また、例えば、観察者が自身の頭部にHMD107を装着した場合に、HMD107においてこの頭部と接触するような位置に接触センサを設けておき、自動モード切替部200はこの接触センサからの信号(接触したか否かを示す信号)を受けるようにする。そして自動モード切替部200は、この信号を監視(HMD107が観察者の頭部に装着されているか否かを監視)する。そして自動モード切替部200は、この信号が「HMD107が観察者の頭部に装着されている」ことを示す場合には、HMD107が使用状態にあると判断する。一方、自動モード切替部200は、この信号が「HMD107が観察者の頭部に装着されていない」ことを示す場合には、HMD107は使用状態にはないと判断する。
【0036】
このように、自動モード切替部200は、現在HMD107が使用状態にあるか否かを、様々な方法でもって判断する。もちろん、判断する方法はこれに限るものではなく、様々な方法が考え得る。そして自動モード切替部200は、現在HMD107が使用状態にあると判断している間は三次元CGソフト101の実行を許可し、現在HMD107が使用状態にはないと判断した場合には、三次元CGソフト101の実行を禁止する。
【0037】
これにより、現在HMD107が使用状態にはない場合には、複合現実空間の画像の生成及びHMD107への出力は行われないので、無駄な画像生成処理、画像出力処理を省くことができる。
【0038】
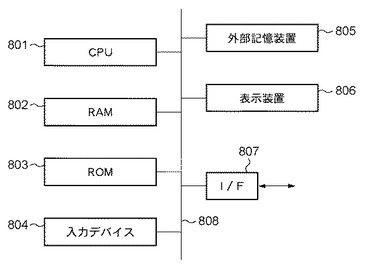
ここで、コンピュータ400に適用可能な装置の構成例について、図6のブロック図を用いて説明する。もちろん、コンピュータ400に適用可能な装置の構成についてはこれ以外にも考えられ、図6の構成に限るものではない。
【0039】
CPU801は、RAM802やROM803に格納されているコンピュータプログラムやデータを用いて処理を実行することで、コンピュータ400全体の動作制御を行うと共に、コンピュータ400が行うものとして上述した各処理を実行する。
【0040】
RAM802は、外部記憶装置805から読み出したコンピュータプログラムやデータを一時的に記憶するためのエリア、I/F807を介して外部から受信した様々なデータを一時的に記憶するためのエリア、を有する。更にRAM802は、CPU801が各種の処理を実行する際に用いるワークエリアも有する。即ち、RAM802は、各種のエリアを適宜提供することができる。ROM803には、コンピュータ400の設定データや、ブートプログラムなどが格納されている。
【0041】
入力デバイス804は、上記の入力デバイス104に相当するもので、マウスやキーボードなどにより構成されており、コンピュータ400の操作者が操作することで、各種の指示をCPU801に対して入力することができる。
【0042】
外部記憶装置805は、ハードディスクドライブ装置などの大容量情報記憶装置である。外部記憶装置805には、OS(オペレーティングシステム)、上記の三次元CGソフト101を含む様々なコンピュータプログラム、仮想空間のデータを含む様々なデータ等、上記の各処理をCPU801が行うために必要な情報が保存されている。外部記憶装置805に保存されているコンピュータプログラムやデータは、CPU801による制御に従って適宜RAM802にロードされ、CPU801による処理対象となる。然るに、上記の説明では、三次元CGソフト101を処理の主体として説明しているが、実際には、CPU801が三次元CGソフト101を実行することで、三次元CGソフト101が行うものとして上述した処理をCPU801が実行することになる。
【0043】
表示装置806は、CRTや液晶画面などにより構成されており、CPU801による処理結果を画像や文字などでもって表示することができる。I/F807は、HMD107を接続する為のもので、上記の画像入力部106や画像出力部102に相当する。また、このI/F807には、上記の位置姿勢計測部105を接続するようにしても良い。上記の各部はバス809に接続されている。
【0044】
なお、図4において自動モード切替部200は、ハードウェアとして実装しても良いが、コンピュータプログラムとして外部記憶装置805に保存させても良い。この場合、このコンピュータプログラムをCPU801が実行することで、CPU801は、自動モード切替部200が行うものとして上述した各処理を実行することになる。
【0045】
なお、本実施形態では、観察者が装着する表示装置としてHMD107のような頭部装着型表示装置を用いたが、他のタイプの表示装置を用いても良い。例えば、ハンドヘルドタイプの表示装置をHMD107の変わりに用いても良い。また、三次元ディスプレイやディスプレイとカメラが一体となったモバイル用端末でも良い。
【0046】
また本実施形態では、現実空間の画像を撮像する装置として、左目用と右目用の2つを設けたが、1つの撮像装置で撮像した現実空間の画像に視差を付け、視差を付けたそれぞれの画像を左目用の仮想空間の画像、右目用の仮想空間の画像に合成しても良い。
【0047】
また、本実施形態では、HMD107はビデオシースルー型のものを用いたが、光学シースルー型のものを用いても良い。その場合のHMDは、HMD107から画像撮像装置左108及び画像撮像装置右109を省いた構成を有し、表示装置左110及び表示装置右111のそれぞれには、それぞれの目に対応した仮想空間の画像が表示されることになる。
【0048】
[第2の実施形態]
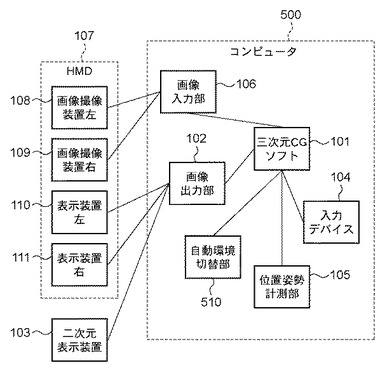
本実施形態に係るシステムの機能構成例について、図5のブロック図を用いて説明する。図5において、図1に示した構成用件と同じ構成用件には同じ参照番号を付しており、その説明は省略する。
【0049】
コンピュータ500には、コンピュータ100が有する構成に加えて、自動環境切替部510が搭載されている。また、画像出力部102には、二次元表示装置103が接続されている。なお、図6に示した構成を有する装置は、コンピュータ500にも適用可能である。
【0050】
二次元表示装置103は、CRTや液晶画面などにより構成されている一般のディスプレイ装置であり、HMD107とは別個に現実空間中に配したディスプレイ装置である。
【0051】
自動環境切替部510は、HMD107の状態を監視しており、HMD107が使用状態にあるか否かを判断する。そしてその判断結果に応じて、三次元CGソフト101の動作を制御する。
【0052】
ここで、HMD107の状態の監視には様々なものがある。例えば、自動環境切替部510は、HMD107の電源がオンになっているかオフになっているかを監視する。この監視のタイミングは定期的に行うことが好ましい。そして、自動環境切替部510は、HMD107の電源がオンになっていれば、HMD107は使用状態にあると判断し、HMD107の電源がオフになっていれば、HMD107は使用状態にはないと判断する。
【0053】
また、例えば、観察者が自身の頭部にHMD107を装着した場合に、HMD107においてこの頭部と接触するような位置に接触センサを設けておき、自動環境切替部510はこの接触センサからの信号(接触したか否かを示す信号)を受けるようにする。そして自動環境切替部510は、この信号を監視(HMD107が観察者の頭部に装着されているか否かを監視)する。そして自動環境切替部510は、この信号が「HMD107が観察者の頭部に装着されている」ことを示す場合には、HMD107が使用状態にあると判断する。一方、自動環境切替部510は、この信号が「HMD107が観察者の頭部に装着されていない」ことを示す場合には、HMD107は使用状態にはないと判断する。
【0054】
また、例えば、自動環境切替部510は、位置姿勢計測部105が計測する位置姿勢を監視することで、位置姿勢が変化したか否かを検知する。HMD107が動けば当然ながらこの計測した位置姿勢も変化するので、自動環境切替部510は、HMD107の位置姿勢の変化を監視していることになる。そして自動環境切替部510は、位置姿勢の変化を検知してから規定時間内に次の変化を検知している限りはHMD107が使用状態にあると判断する。一方、自動環境切替部510は、位置姿勢の変化を検知してから規定時間内に次の変化を検知しなかった場合には、HMD107は使用状態にはないと判断する。
【0055】
また、例えば、自動環境切替部510は、三次元CGソフト101が求めた画像撮像装置左108や画像撮像装置右109やHMD107の姿勢を監視する。位置姿勢計測部105が直接、画像撮像装置左108や画像撮像装置右109やHMD107の位置姿勢を計測している場合には、自動環境切替部510はこの計測している姿勢を監視する。そして自動環境切替部510は、監視している姿勢が、二次元表示装置103の表示面(表示面の向きは予め測定し、データとしてコンピュータ500内に保存しているものとする)に向いていることを検知した場合、HMD107が使用状態にあると判断する。一方、自動環境切替部510は、監視している姿勢が、二次元表示装置103の表示面に向いていないことを検知した場合、HMD107は使用状態にはないと判断する。「向いている」と判断するための方法については様々な方法が考え得るが、例えば、監視している姿勢が示す方向ベクトルと表示面の法線ベクトルとが為す角度が180度±α(α>0)であれば「向いている」と判断する。
【0056】
このように、自動環境切替部510は、現在HMD107が使用状態にあるか否かを、様々な方法でもって判断する。もちろん、判断する方法はこれに限るものではなく、様々な方法が考え得る。そして自動環境切替部510は、現在HMD107が使用状態にあると判断している間は第1の実施形態と同様に三次元CGソフト101の実行を許可する。一方、自動環境切替部510は、現在HMD107が使用状態にはないと判断した場合には、仮想空間の画像を生成して二次元表示装置103に出力させるように三次元CGソフト101を制御する。
【0057】
なお、この自動環境切替部510は、ハードウェアとして実装しても良いが、コンピュータプログラムとして外部記憶装置805に保存させても良い。この場合、このコンピュータプログラムをCPU801が実行することで、CPU801は、自動環境切替部510が行うものとして上述した各処理を実行することになる。
【0058】
自動環境切替部510が現在HMD107が使用状態にはないと判断した場合に、三次元CGソフト101に行わせる処理について、同処理のフローチャートを示す図2を用いて説明する。
【0059】
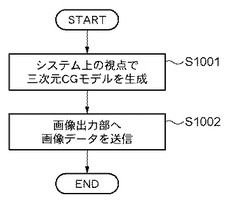
ステップS1001では、三次元CGソフト101は、予め設定された位置姿勢、入力デバイス104等を用いて指示された位置姿勢、アプリケーションプログラムなどでもって指定された位置姿勢、等の様々な方法で指定された位置姿勢を取得する。そして三次元CGソフト101は、この取得した位置姿勢を有する視点から見える仮想空間の画像を生成する。ステップS1002では、画像出力部102は、三次元CGソフト101が生成した仮想空間の画像を二次元表示装置103に送出する。なお、上記の各実施形態で説明したそれぞれの技術は適宜組み合わせて用いても良い。
【0060】
(その他の実施例)
また、本発明は、以下の処理を実行することによっても実現される。即ち、上述した実施形態の機能を実現するソフトウェア(プログラム)を、ネットワーク又は各種記憶媒体を介してシステム或いは装置に供給し、そのシステム或いは装置のコンピュータ(またはCPUやMPU等)がプログラムを読み出して実行する処理である。
【技術分野】
【0001】
本発明は、複合現実感提示技術に関するものである。
【背景技術】
【0002】
従来、機械設計の分野では三次元CADシステムが用いられており、機構及び機構の構成部品を立体的に表示しながら設計を行うことが可能になっている。通常、三次元CADシステムでは、表示装置として二次元ディスプレイを利用し、入力装置としてマウスやキーボードを利用するのが一般的である。
【0003】
一方、近年では三次元データを立体的に表示する表示装置が実用化されている。このような表示装置では、視差のついた映像に偏光をかけて表示し、体験者は偏光眼鏡を使って立体を知覚することが可能である。
【0004】
さらに、現実空間に三次元データなどの仮想情報を重畳して提示する複合現実感技術を使った表示装置なども実用化されている。複合現実感の提示を行う表示装置は、例えば次のような構成を有する装置である。即ち、ビデオカメラ等の撮像装置が撮像した現実空間の画像上に、撮像装置の位置及び姿勢に応じて生成した仮想空間の画像(例えばコンピュータグラフィックスにより描画された仮想物体や文字情報等)を重畳描画した画像を表示する装置である。このような装置には、例えば、HMD(ヘッドマウントディスプレイ、頭部装着型表示装置)を用いることができる。また、係る表示装置は、観察者の頭部に装着された光学シースルー型ディスプレイに、観察者の視点の位置及び姿勢に応じて生成した仮想空間の画像を表示する光学シースルー方式によっても実現されている。
【0005】
このように、三次元CADシステムで設計された三次元データを、立体表示可能な表示装置を使って観察するシステムはいくつか存在している。例えば特許文献1がその例である。この方法を用いれば、三次元CADシステムを複合現実感システムとしても利用することが出来る。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2007−299062号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
三次元CADシステムで作成した三次元データを複合現実感システムで観察するシステムでは、観察者の任意の操作に基づいて表示部を切り替えるのが一般的である。例えば、画面上のボタンをマウスでクリックすることで、二次元ディスプレイの表示から複合現実感システムによる表示へと切り替える方法などが一般的である。しかし、通常の三次元CADシステムの操作部(二次元ディスプレイ、マウス、キーボード)による操作と、複合現実感システムでの操作では、操作部や操作方法は異なる。然るに、双方のモードを切り替えるためには、それぞれのシステムで異なる操作法を習得する必要があった。観察者にとっては、システムの操作は出来るだけ簡単な操作が望まれ、出来ることなら双方のモードを自動的に切り替える仕組みが望まれる。
【0008】
本発明は以上の問題に鑑みてなされたものであり、複合現実空間を観察する観察者が装着する表示装置や、別個に設けられた表示装置に対して提供する画像を、観察者の操作を介することなく適宜切り替える為の技術を提供することを目的とする。
【課題を解決するための手段】
【0009】
本発明の目的を達成するために、例えば、本発明の画像処理装置は以下の構成を備える。即ち、仮想空間の画像を生成し、該画像を観察する観察者が装着する表示装置に対して出力する生成手段と、前記表示装置が使用状態にあるか否かを判断する判断手段と、前記表示装置が使用状態にあると前記判断手段が判断した場合に前記生成手段を動作させる制御手段とを備えることを特徴とする。
【発明の効果】
【0010】
本発明の構成によれば、複合現実空間を観察する観察者が装着する表示装置や、別個に設けられた表示装置に対して提供する画像を、観察者の操作を介することなく適宜切り替えることができる。
【図面の簡単な説明】
【0011】
【図1】従来のシステムの構成を示すブロック図。
【図2】HMD107が使用状態ではない場合に三次元CGソフト101に行わせる処理のフローチャート。
【図3】システムの動作を示すフローチャート。
【図4】システムの機能構成例を示すブロック図。
【図5】システムの機能構成例を示すブロック図。
【図6】コンピュータ400に適用可能な装置の構成例を示すブロック図。
【発明を実施するための形態】
【0012】
以下、添付図面を参照し、本発明の好適な実施形態について説明する。なお、以下説明する実施形態は、本発明を具体的に実施した場合の一例を示すもので、特許請求の範囲に記載の構成の具体的な実施例の1つである。
【0013】
[第1の実施形態]
仮想空間の画像と現実空間の画像との合成画像である複合現実空間の画像を生成して観察者に提示するための従来のシステムの構成について、図1のブロック図を用いて説明する。もちろん、複合現実空間の画像を生成して観察者に提示するための構成については様々なものが従来から提案されているが、ここではその一例について触れる。
【0014】
係るシステムは図1に示す如く、HMD107と、コンピュータ100と、で構成されている。HMD107は、HMD107を頭部に装着する観察者の左眼に対応する現実空間の画像を撮像する画像撮像装置左108と、HMD107を頭部に装着する観察者の右眼に対応する現実空間の画像を撮像する画像撮像装置右109と、を有する。画像撮像装置左108及び画像撮像装置右109のそれぞれは、現実空間の動画像を撮像するもので、撮像した各フレームの画像(現実空間の画像)はコンピュータ100に対して送出される。
【0015】
また、HMD107は、HMD107を頭部に装着する観察者の左眼に対して画像を提供する表示装置左110と、HMD107を頭部に装着する観察者の右眼に対して画像を提供する表示装置右111と、を有する。表示装置左110及び表示装置右111のそれぞれは、観察者がHMD107を自身の頭部に装着した場合に、この観察者の左眼、右眼の眼前に位置するようにHMD107に対して取り付けられたものである。表示装置左110には、コンピュータ100から送出される左目用の画像が表示され、表示装置右111には、コンピュータ100から送出される右目用の画像が表示される。これにより、観察者の左眼の眼前には左目用の画像が表示され、右眼の眼前には右目用の画像が表示されることになるので、観察者はそれぞれの目で対応する画像を観察することで、立体視を実現できる。
【0016】
次に、画像処理装置として機能するコンピュータ100について説明する。画像撮像装置左108、画像撮像装置右109のそれぞれから送出された現実空間の画像は画像入力部106が取得し、画像入力部106は取得したそれぞれの現実空間の画像を三次元CGソフト101に供給する。
【0017】
位置姿勢計測部105は、画像撮像装置左108及び画像撮像装置右109の位置姿勢を求めるために必要な情報を収集する。この収集する情報には様々なものが考え得る。
【0018】
例えば、画像撮像装置左108及び画像撮像装置右109は、それらの間の位置関係が固定されたままHMD107に取り付けられているので、一方の画像撮像装置の位置姿勢を計測すれば、他方の画像撮像装置の位置姿勢は計算可能である。然るにこの場合、位置姿勢計測部105は、画像撮像装置左108、画像撮像装置右109の何れか一方の位置姿勢を計測すればよいことになる。
【0019】
また、画像撮像装置左108との位置関係が既知であるHMD107上の1点の位置姿勢を計測すれば、画像撮像装置左108の位置姿勢は計算可能である。これは画像撮像装置右109の場合も同様である。
【0020】
このように、計測対象の位置姿勢さえ計測することができるのであれば、どの部分の位置姿勢を計測し、計測した位置姿勢をどのように用いて画像撮像装置左108及び画像撮像装置右109の位置姿勢を求めるのかについては特に限定するものではない。
【0021】
また、計測対象の位置姿勢の計測方法については従来から様々な方法が提案されており、何れの方法を用いても良い。例えば、磁気センサを用いる場合、計測対象位置に磁気のレシーバを取り付け、現実空間中に配した磁気の発信源からの磁気の変化をこのレシーバにより計測し、計測した磁気の変化から、このレシーバの位置姿勢を求める。また、HMD107の動画像を撮像するカメラを現実空間中に設け、このカメラにより撮像された各フレームの画像から、このHMD107の位置姿勢を推定する方法を用いても良い。
【0022】
このように、本実施形態では、画像撮像装置左108及び画像撮像装置右109の位置姿勢さえ取得することができるのであれば、如何なる技術を採用しても良い。そして採用した技術を実現するための構成が位置姿勢計測部105となる。もちろん、構成によっては、この位置姿勢計測部105は、コンピュータ100の外部に設けても良いし、何らかの装置に組み込んでも良い。
【0023】
何れにせよ、位置姿勢計測部105により取得した位置姿勢は三次元CGソフト101に供給される。そして三次元CGソフト101は、この位置姿勢から、画像撮像装置左108及び画像撮像装置右109の位置姿勢を確定させる。確定させる方法は、上記の通り、計測した位置姿勢がどの部分の位置姿勢であるのかに応じて異なる。
【0024】
三次元CGソフト101は、この確定させた画像撮像装置左108の位置姿勢を有する視点から見える仮想空間の画像を、コンピュータ100内に保持している若しくは外部装置から取得した仮想空間のデータを用いて生成する。そして三次元CGソフト101は、この生成した仮想空間の画像を、画像入力部106から取得した、画像撮像装置左108により撮像された現実空間の画像上に合成することで、左目用の複合現実空間の画像を生成する。同様に、三次元CGソフト101は、この確定させた画像撮像装置右109の位置姿勢を有する視点から見える仮想空間の画像を、上記の仮想空間のデータを用いて生成する。そして三次元CGソフト101は、この生成した仮想空間の画像を、画像入力部106から取得した、画像撮像装置右109により撮像された現実空間の画像上に合成することで、右目用の複合現実空間の画像を生成する。
【0025】
画像出力部102は、三次元CGソフト101が生成した左目用の複合現実空間の画像を表示装置左110に対して送出すると共に、三次元CGソフト101が生成した右目用の複合現実空間の画像を表示装置右111に対して送出する。
【0026】
入力デバイス104は、マウスやキーボードなど、コンピュータ100の操作者がコンピュータ100に対して指示入力を行うために操作するものである。例えば、表示装置左110及び表示装置右111のそれぞれに表示する内容を切り替えるための指示を入力するために使用する。
【0027】
以上説明したシステムの動作について、図3のフローチャートを用いて説明する。ステップS2001では、画像撮像装置左108及び画像撮像装置右109のそれぞれは、左目用の現実空間の画像、右目用の現実空間の画像を撮像し、撮像した画像をコンピュータ100に対して送出する。画像入力部106は、このそれぞれの画像を三次元CGソフト101に供給する。
【0028】
ステップS2001と並行してステップS2002では、位置姿勢計測部105は計測対象の位置姿勢を計測し、計測した位置姿勢を三次元CGソフト101に対して供給する。
【0029】
ステップS2003では、三次元CGソフト101は、位置姿勢計測部105から供給された位置姿勢から、画像撮像装置左108及び画像撮像装置右109の位置姿勢を確定させる。そして三次元CGソフト101は、この確定させた画像撮像装置左108の位置姿勢を有する視点から見える仮想空間の画像を、上記の仮想空間のデータを用いて生成する。そして三次元CGソフト101は、この生成した仮想空間の画像を、画像入力部106から取得した、画像撮像装置左108により撮像された現実空間の画像上に合成することで、左目用の複合現実空間の画像を生成する。同様に、三次元CGソフト101は、この確定させた画像撮像装置右109の位置姿勢を有する視点から見える仮想空間の画像を、上記の仮想空間のデータを用いて生成する。そして三次元CGソフト101は、この生成した仮想空間の画像を、画像入力部106から取得した、画像撮像装置右109により撮像された現実空間の画像上に合成することで、右目用の複合現実空間の画像を生成する。
【0030】
ステップS2004では、画像出力部102は、三次元CGソフト101が生成した左目用の複合現実空間の画像を表示装置左110に送出すると共に、三次元CGソフト101が生成した右目用の複合現実空間の画像を表示装置右111に送出する。
【0031】
以上説明した構成が、複合現実空間を観察者に対して提示するための従来のシステムの構成である。本実施形態では、表示装置左110及び表示装置右111に表示する内容を、HMD107の使用状態に応じて切り替える為の構成をコンピュータ100に加えたシステムについて説明する。
【0032】
先ず、本実施形態に係るシステムの機能構成例について、図4のブロック図を用いて説明する。図4において図1に示した構成用件と同じ構成用件には同じ参照番号を付しており、その説明は省略する。
【0033】
コンピュータ400には、コンピュータ100が有する構成に加え、自動モード切替部200が搭載されている。自動モード切替部200は、HMD107の状態を監視しており、HMD107が使用状態にあるか否かを判断する。そしてその判断結果に応じて、三次元CGソフト101の動作を許可したり、停止させたりする動作制御を行う。
【0034】
ここで、HMD107の状態の監視には様々なものがある。例えば、自動モード切替部200は、HMD107の電源がオンになっているかオフになっているかを監視する。この監視のタイミングは定期的に行うことが好ましい。そして、自動モード切替部200は、HMD107の電源がオンになっていれば、HMD107は使用状態にあると判断し、HMD107の電源がオフになっていれば、HMD107は使用状態にはないと判断する。
【0035】
また、例えば、観察者が自身の頭部にHMD107を装着した場合に、HMD107においてこの頭部と接触するような位置に接触センサを設けておき、自動モード切替部200はこの接触センサからの信号(接触したか否かを示す信号)を受けるようにする。そして自動モード切替部200は、この信号を監視(HMD107が観察者の頭部に装着されているか否かを監視)する。そして自動モード切替部200は、この信号が「HMD107が観察者の頭部に装着されている」ことを示す場合には、HMD107が使用状態にあると判断する。一方、自動モード切替部200は、この信号が「HMD107が観察者の頭部に装着されていない」ことを示す場合には、HMD107は使用状態にはないと判断する。
【0036】
このように、自動モード切替部200は、現在HMD107が使用状態にあるか否かを、様々な方法でもって判断する。もちろん、判断する方法はこれに限るものではなく、様々な方法が考え得る。そして自動モード切替部200は、現在HMD107が使用状態にあると判断している間は三次元CGソフト101の実行を許可し、現在HMD107が使用状態にはないと判断した場合には、三次元CGソフト101の実行を禁止する。
【0037】
これにより、現在HMD107が使用状態にはない場合には、複合現実空間の画像の生成及びHMD107への出力は行われないので、無駄な画像生成処理、画像出力処理を省くことができる。
【0038】
ここで、コンピュータ400に適用可能な装置の構成例について、図6のブロック図を用いて説明する。もちろん、コンピュータ400に適用可能な装置の構成についてはこれ以外にも考えられ、図6の構成に限るものではない。
【0039】
CPU801は、RAM802やROM803に格納されているコンピュータプログラムやデータを用いて処理を実行することで、コンピュータ400全体の動作制御を行うと共に、コンピュータ400が行うものとして上述した各処理を実行する。
【0040】
RAM802は、外部記憶装置805から読み出したコンピュータプログラムやデータを一時的に記憶するためのエリア、I/F807を介して外部から受信した様々なデータを一時的に記憶するためのエリア、を有する。更にRAM802は、CPU801が各種の処理を実行する際に用いるワークエリアも有する。即ち、RAM802は、各種のエリアを適宜提供することができる。ROM803には、コンピュータ400の設定データや、ブートプログラムなどが格納されている。
【0041】
入力デバイス804は、上記の入力デバイス104に相当するもので、マウスやキーボードなどにより構成されており、コンピュータ400の操作者が操作することで、各種の指示をCPU801に対して入力することができる。
【0042】
外部記憶装置805は、ハードディスクドライブ装置などの大容量情報記憶装置である。外部記憶装置805には、OS(オペレーティングシステム)、上記の三次元CGソフト101を含む様々なコンピュータプログラム、仮想空間のデータを含む様々なデータ等、上記の各処理をCPU801が行うために必要な情報が保存されている。外部記憶装置805に保存されているコンピュータプログラムやデータは、CPU801による制御に従って適宜RAM802にロードされ、CPU801による処理対象となる。然るに、上記の説明では、三次元CGソフト101を処理の主体として説明しているが、実際には、CPU801が三次元CGソフト101を実行することで、三次元CGソフト101が行うものとして上述した処理をCPU801が実行することになる。
【0043】
表示装置806は、CRTや液晶画面などにより構成されており、CPU801による処理結果を画像や文字などでもって表示することができる。I/F807は、HMD107を接続する為のもので、上記の画像入力部106や画像出力部102に相当する。また、このI/F807には、上記の位置姿勢計測部105を接続するようにしても良い。上記の各部はバス809に接続されている。
【0044】
なお、図4において自動モード切替部200は、ハードウェアとして実装しても良いが、コンピュータプログラムとして外部記憶装置805に保存させても良い。この場合、このコンピュータプログラムをCPU801が実行することで、CPU801は、自動モード切替部200が行うものとして上述した各処理を実行することになる。
【0045】
なお、本実施形態では、観察者が装着する表示装置としてHMD107のような頭部装着型表示装置を用いたが、他のタイプの表示装置を用いても良い。例えば、ハンドヘルドタイプの表示装置をHMD107の変わりに用いても良い。また、三次元ディスプレイやディスプレイとカメラが一体となったモバイル用端末でも良い。
【0046】
また本実施形態では、現実空間の画像を撮像する装置として、左目用と右目用の2つを設けたが、1つの撮像装置で撮像した現実空間の画像に視差を付け、視差を付けたそれぞれの画像を左目用の仮想空間の画像、右目用の仮想空間の画像に合成しても良い。
【0047】
また、本実施形態では、HMD107はビデオシースルー型のものを用いたが、光学シースルー型のものを用いても良い。その場合のHMDは、HMD107から画像撮像装置左108及び画像撮像装置右109を省いた構成を有し、表示装置左110及び表示装置右111のそれぞれには、それぞれの目に対応した仮想空間の画像が表示されることになる。
【0048】
[第2の実施形態]
本実施形態に係るシステムの機能構成例について、図5のブロック図を用いて説明する。図5において、図1に示した構成用件と同じ構成用件には同じ参照番号を付しており、その説明は省略する。
【0049】
コンピュータ500には、コンピュータ100が有する構成に加えて、自動環境切替部510が搭載されている。また、画像出力部102には、二次元表示装置103が接続されている。なお、図6に示した構成を有する装置は、コンピュータ500にも適用可能である。
【0050】
二次元表示装置103は、CRTや液晶画面などにより構成されている一般のディスプレイ装置であり、HMD107とは別個に現実空間中に配したディスプレイ装置である。
【0051】
自動環境切替部510は、HMD107の状態を監視しており、HMD107が使用状態にあるか否かを判断する。そしてその判断結果に応じて、三次元CGソフト101の動作を制御する。
【0052】
ここで、HMD107の状態の監視には様々なものがある。例えば、自動環境切替部510は、HMD107の電源がオンになっているかオフになっているかを監視する。この監視のタイミングは定期的に行うことが好ましい。そして、自動環境切替部510は、HMD107の電源がオンになっていれば、HMD107は使用状態にあると判断し、HMD107の電源がオフになっていれば、HMD107は使用状態にはないと判断する。
【0053】
また、例えば、観察者が自身の頭部にHMD107を装着した場合に、HMD107においてこの頭部と接触するような位置に接触センサを設けておき、自動環境切替部510はこの接触センサからの信号(接触したか否かを示す信号)を受けるようにする。そして自動環境切替部510は、この信号を監視(HMD107が観察者の頭部に装着されているか否かを監視)する。そして自動環境切替部510は、この信号が「HMD107が観察者の頭部に装着されている」ことを示す場合には、HMD107が使用状態にあると判断する。一方、自動環境切替部510は、この信号が「HMD107が観察者の頭部に装着されていない」ことを示す場合には、HMD107は使用状態にはないと判断する。
【0054】
また、例えば、自動環境切替部510は、位置姿勢計測部105が計測する位置姿勢を監視することで、位置姿勢が変化したか否かを検知する。HMD107が動けば当然ながらこの計測した位置姿勢も変化するので、自動環境切替部510は、HMD107の位置姿勢の変化を監視していることになる。そして自動環境切替部510は、位置姿勢の変化を検知してから規定時間内に次の変化を検知している限りはHMD107が使用状態にあると判断する。一方、自動環境切替部510は、位置姿勢の変化を検知してから規定時間内に次の変化を検知しなかった場合には、HMD107は使用状態にはないと判断する。
【0055】
また、例えば、自動環境切替部510は、三次元CGソフト101が求めた画像撮像装置左108や画像撮像装置右109やHMD107の姿勢を監視する。位置姿勢計測部105が直接、画像撮像装置左108や画像撮像装置右109やHMD107の位置姿勢を計測している場合には、自動環境切替部510はこの計測している姿勢を監視する。そして自動環境切替部510は、監視している姿勢が、二次元表示装置103の表示面(表示面の向きは予め測定し、データとしてコンピュータ500内に保存しているものとする)に向いていることを検知した場合、HMD107が使用状態にあると判断する。一方、自動環境切替部510は、監視している姿勢が、二次元表示装置103の表示面に向いていないことを検知した場合、HMD107は使用状態にはないと判断する。「向いている」と判断するための方法については様々な方法が考え得るが、例えば、監視している姿勢が示す方向ベクトルと表示面の法線ベクトルとが為す角度が180度±α(α>0)であれば「向いている」と判断する。
【0056】
このように、自動環境切替部510は、現在HMD107が使用状態にあるか否かを、様々な方法でもって判断する。もちろん、判断する方法はこれに限るものではなく、様々な方法が考え得る。そして自動環境切替部510は、現在HMD107が使用状態にあると判断している間は第1の実施形態と同様に三次元CGソフト101の実行を許可する。一方、自動環境切替部510は、現在HMD107が使用状態にはないと判断した場合には、仮想空間の画像を生成して二次元表示装置103に出力させるように三次元CGソフト101を制御する。
【0057】
なお、この自動環境切替部510は、ハードウェアとして実装しても良いが、コンピュータプログラムとして外部記憶装置805に保存させても良い。この場合、このコンピュータプログラムをCPU801が実行することで、CPU801は、自動環境切替部510が行うものとして上述した各処理を実行することになる。
【0058】
自動環境切替部510が現在HMD107が使用状態にはないと判断した場合に、三次元CGソフト101に行わせる処理について、同処理のフローチャートを示す図2を用いて説明する。
【0059】
ステップS1001では、三次元CGソフト101は、予め設定された位置姿勢、入力デバイス104等を用いて指示された位置姿勢、アプリケーションプログラムなどでもって指定された位置姿勢、等の様々な方法で指定された位置姿勢を取得する。そして三次元CGソフト101は、この取得した位置姿勢を有する視点から見える仮想空間の画像を生成する。ステップS1002では、画像出力部102は、三次元CGソフト101が生成した仮想空間の画像を二次元表示装置103に送出する。なお、上記の各実施形態で説明したそれぞれの技術は適宜組み合わせて用いても良い。
【0060】
(その他の実施例)
また、本発明は、以下の処理を実行することによっても実現される。即ち、上述した実施形態の機能を実現するソフトウェア(プログラム)を、ネットワーク又は各種記憶媒体を介してシステム或いは装置に供給し、そのシステム或いは装置のコンピュータ(またはCPUやMPU等)がプログラムを読み出して実行する処理である。
【特許請求の範囲】
【請求項1】
仮想空間の画像を生成し、該画像を観察する観察者が装着する表示装置に対して出力する生成手段と、
前記表示装置が使用状態にあるか否かを判断する判断手段と、
前記表示装置が使用状態にあると前記判断手段が判断した場合に前記生成手段を動作させる制御手段と
を備えることを特徴とする画像処理装置。
【請求項2】
前記判断手段は、前記表示装置の電源がオンになっているかオフになっているかを監視しており、前記表示装置の電源がオンになっていれば前記表示装置が使用状態にあると判断し、前記表示装置の電源がオフになっていれば前記表示装置は使用状態にはないと判断することを特徴とする請求項1に記載の画像処理装置。
【請求項3】
前記判断手段は、前記表示装置が前記観察者の頭部に装着されているか否かを監視しており、前記表示装置が前記観察者の頭部に装着されていれば前記表示装置が使用状態にあると判断し、前記表示装置が前記観察者の頭部に装着されていなければ前記表示装置は使用状態にはないと判断することを特徴とする請求項1に記載の画像処理装置。
【請求項4】
前記判断手段は、前記表示装置の位置姿勢の変化を検知してから規定時間内に次の変化を検知している限りは前記表示装置が使用状態にあると判断し、位置姿勢の変化を検知してから規定時間内に次の変化を検知しなかった場合には前記表示装置は使用状態にはないと判断することを特徴とする請求項1に記載の画像処理装置。
【請求項5】
前記判断手段は、前記表示装置の姿勢が、前記表示装置とは別個に現実空間中に配されている表示装置の表示面に向いていることを検知した場合には、前記表示装置が使用状態にあると判断し、向いていないことを検知した場合には、前記表示装置は使用状態にはないと判断することを特徴とする請求項1に記載の画像処理装置。
【請求項6】
前記制御手段は、前記表示装置が使用状態にあると前記判断手段が判断した場合は、前記生成手段に前記仮想空間の画像を生成させ、該仮想空間の画像を現実空間の画像上に合成して前記表示装置に出力させることを特徴とする請求項1乃至5の何れか1項に記載の画像処理装置。
【請求項7】
前記制御手段は、前記表示装置が使用状態にないと前記判断手段が判断した場合には、前記生成手段の動作を停止させることを特徴とする請求項1乃至6の何れか1項に記載の画像処理装置。
【請求項8】
前記制御手段は、前記表示装置が使用状態にないと前記判断手段が判断した場合には、前記生成手段に前記仮想空間の画像を生成させ、該仮想空間の画像を、前記表示装置とは別個に現実空間中に配されている表示装置に対して出力させることを特徴とする請求項1乃至6の何れか1項に記載の画像処理装置。
【請求項9】
前記観察者が装着する表示装置は、頭部装着型表示装置であることを特徴とする請求項1乃至8の何れか1項に記載の画像処理装置。
【請求項10】
画像処理装置が行う画像処理方法であって、
前記画像処理装置の生成手段が、仮想空間の画像を生成し、該画像を観察する観察者が装着する表示装置に対して出力する生成工程と、
前記画像処理装置の判断手段が、前記表示装置が使用状態にあるか否かを判断する判断工程と、
前記画像処理装置の制御手段が、前記表示装置が使用状態にあると前記判断工程で判断した場合に前記生成工程を実行させる制御工程と
を備えることを特徴とする画像処理方法。
【請求項11】
コンピュータを、請求項1乃至9の何れか1項に記載の画像処理装置が有する各手段として機能させるためのコンピュータプログラム。
【請求項1】
仮想空間の画像を生成し、該画像を観察する観察者が装着する表示装置に対して出力する生成手段と、
前記表示装置が使用状態にあるか否かを判断する判断手段と、
前記表示装置が使用状態にあると前記判断手段が判断した場合に前記生成手段を動作させる制御手段と
を備えることを特徴とする画像処理装置。
【請求項2】
前記判断手段は、前記表示装置の電源がオンになっているかオフになっているかを監視しており、前記表示装置の電源がオンになっていれば前記表示装置が使用状態にあると判断し、前記表示装置の電源がオフになっていれば前記表示装置は使用状態にはないと判断することを特徴とする請求項1に記載の画像処理装置。
【請求項3】
前記判断手段は、前記表示装置が前記観察者の頭部に装着されているか否かを監視しており、前記表示装置が前記観察者の頭部に装着されていれば前記表示装置が使用状態にあると判断し、前記表示装置が前記観察者の頭部に装着されていなければ前記表示装置は使用状態にはないと判断することを特徴とする請求項1に記載の画像処理装置。
【請求項4】
前記判断手段は、前記表示装置の位置姿勢の変化を検知してから規定時間内に次の変化を検知している限りは前記表示装置が使用状態にあると判断し、位置姿勢の変化を検知してから規定時間内に次の変化を検知しなかった場合には前記表示装置は使用状態にはないと判断することを特徴とする請求項1に記載の画像処理装置。
【請求項5】
前記判断手段は、前記表示装置の姿勢が、前記表示装置とは別個に現実空間中に配されている表示装置の表示面に向いていることを検知した場合には、前記表示装置が使用状態にあると判断し、向いていないことを検知した場合には、前記表示装置は使用状態にはないと判断することを特徴とする請求項1に記載の画像処理装置。
【請求項6】
前記制御手段は、前記表示装置が使用状態にあると前記判断手段が判断した場合は、前記生成手段に前記仮想空間の画像を生成させ、該仮想空間の画像を現実空間の画像上に合成して前記表示装置に出力させることを特徴とする請求項1乃至5の何れか1項に記載の画像処理装置。
【請求項7】
前記制御手段は、前記表示装置が使用状態にないと前記判断手段が判断した場合には、前記生成手段の動作を停止させることを特徴とする請求項1乃至6の何れか1項に記載の画像処理装置。
【請求項8】
前記制御手段は、前記表示装置が使用状態にないと前記判断手段が判断した場合には、前記生成手段に前記仮想空間の画像を生成させ、該仮想空間の画像を、前記表示装置とは別個に現実空間中に配されている表示装置に対して出力させることを特徴とする請求項1乃至6の何れか1項に記載の画像処理装置。
【請求項9】
前記観察者が装着する表示装置は、頭部装着型表示装置であることを特徴とする請求項1乃至8の何れか1項に記載の画像処理装置。
【請求項10】
画像処理装置が行う画像処理方法であって、
前記画像処理装置の生成手段が、仮想空間の画像を生成し、該画像を観察する観察者が装着する表示装置に対して出力する生成工程と、
前記画像処理装置の判断手段が、前記表示装置が使用状態にあるか否かを判断する判断工程と、
前記画像処理装置の制御手段が、前記表示装置が使用状態にあると前記判断工程で判断した場合に前記生成工程を実行させる制御工程と
を備えることを特徴とする画像処理方法。
【請求項11】
コンピュータを、請求項1乃至9の何れか1項に記載の画像処理装置が有する各手段として機能させるためのコンピュータプログラム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図2】
【図3】
【図4】
【図5】
【図6】
【公開番号】特開2012−48659(P2012−48659A)
【公開日】平成24年3月8日(2012.3.8)
【国際特許分類】
【出願番号】特願2010−192711(P2010−192711)
【出願日】平成22年8月30日(2010.8.30)
【出願人】(000001007)キヤノン株式会社 (59,756)
【Fターム(参考)】
【公開日】平成24年3月8日(2012.3.8)
【国際特許分類】
【出願日】平成22年8月30日(2010.8.30)
【出願人】(000001007)キヤノン株式会社 (59,756)
【Fターム(参考)】
[ Back to top ]