
画像処理装置、画像処理装置の制御方法、及びプログラム
【課題】仮想空間内を移動するオブジェクトを仮想カメラから見た様子を表す画面を表示部に表示させる場合における仮想カメラの移動制御を向上させることが可能な画像処理装置を提供すること。
【解決手段】オブジェクト制御部(62)はオブジェクトを仮想空間内で移動させる。移動方向決定部(66)は、オブジェクトの移動方向に対応する方向を仮想カメラの移動方向として決定する。待機部(68)は、オブジェクトの移動が開始されてから待機時間が経過するまで、上記の移動方向への仮想カメラの移動を待機させる。加速部(70)は、待機時間が経過した場合、上記の移動方向に仮想カメラを加速させる。オブジェクトを移動させるための動作をキャラクタオブジェクトが行った結果としてオブジェクトが仮想空間内を移動する場合、待機時間設定部(70)は、キャラクタオブジェクトによって行われた上記の動作の種類に基づいて、待機時間を設定する。
【解決手段】オブジェクト制御部(62)はオブジェクトを仮想空間内で移動させる。移動方向決定部(66)は、オブジェクトの移動方向に対応する方向を仮想カメラの移動方向として決定する。待機部(68)は、オブジェクトの移動が開始されてから待機時間が経過するまで、上記の移動方向への仮想カメラの移動を待機させる。加速部(70)は、待機時間が経過した場合、上記の移動方向に仮想カメラを加速させる。オブジェクトを移動させるための動作をキャラクタオブジェクトが行った結果としてオブジェクトが仮想空間内を移動する場合、待機時間設定部(70)は、キャラクタオブジェクトによって行われた上記の動作の種類に基づいて、待機時間を設定する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は画像処理装置、画像処理装置の制御方法、及びプログラムに関する。
【背景技術】
【0002】
仮想空間内を移動するオブジェクトを仮想カメラから見た様子を表す画面を表示部に表示させる画像処理装置が知られている。例えば、ゲーム装置が上記のような画像処理装置として知られている。例えば、サッカーゲームを実行するゲーム装置では、ゲーム空間内を移動するボール(ボールオブジェクト)及び選手キャラクタ(選手オブジェクト)を仮想カメラから見た様子を表すゲーム画面が表示される。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2011−110323号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
上記のようなサッカーゲームでは、ボールがゲーム画面内に表示されるように、ボールの移動に基づいて仮想カメラの移動が制御される。この場合、ボールと仮想カメラとの位置関係が一定となるように、仮想カメラを移動させてしまうと、常にボールがゲーム画面内の同じ位置に表示されることになる。その結果、ユーザの目にはボールが仮想空間内を移動しているようには見えず、あたかも背景部分が移動しているかのように見えてしまい、ゲーム画面の表示が不自然であるとユーザが感じてしまう場合がある。
【0005】
上記のような不自然さをユーザに感じさせないようにするための方法としては、例えば、シュートやパスが選手キャラクタによって行われた場合に、ボールの移動の開始に遅れて、仮想カメラの移動を開始させる方法が考えられる。すなわち、ボールの移動が開始された場合に、待機時間(例えば数フレーム)が経過した後に仮想カメラの移動を開始させる方法が考えられる。しかしながら、このような方法を採用する場合には、単に、仮想カメラの移動をボールの移動の開始に遅れて開始させるだけでなく、ボールの移動の仕方(例えば距離等)がユーザから見て分かりやすくなるように、仮想カメラの移動制御をさらに向上させる必要がある。具体的には、例えば、選手キャラクタによってボールが大きく蹴り出された場合に、ボールが大きく移動することがユーザから見て分かりやすくなるように、仮想カメラの移動制御を向上させる必要がある。
【0006】
本発明は上記課題に鑑みてなされたものであって、その目的は、仮想空間内を移動するオブジェクトを仮想カメラから見た様子を表す画面を表示部に表示させる場合における仮想カメラの移動制御を向上させることが可能な画像処理装置、画像処理装置の制御方法、及びプログラムを提供することにある。
【課題を解決するための手段】
【0007】
上記課題を解決するために、本発明に係る画像処理装置は、仮想空間内を移動するオブジェクトを仮想カメラから見た様子を表す画像を生成する画像処理装置において、前記オブジェクトを移動させるオブジェクト制御手段と、前記オブジェクトの移動に基づいて、前記仮想カメラを移動させる仮想カメラ制御手段と、前記仮想空間を前記仮想カメラから見た様子を表す画像を生成する画像生成手段と、を含み、前記仮想カメラ制御手段は、前記オブジェクトの移動方向に対応する方向を前記仮想カメラの移動方向として決定する移動方向決定手段と、前記オブジェクトの移動が開始されてから待機時間が経過するまで、前記移動方向決定手段によって決定された移動方向への前記仮想カメラの移動を待機させる待機手段と、前記待機時間が経過した場合、前記移動方向決定手段によって決定された移動方向に前記仮想カメラを加速させる加速手段と、を含み、前記オブジェクトは、前記オブジェクトを移動させるための動作をキャラクタオブジェクトが行った結果として、前記仮想空間内を移動し、前記待機手段は、前記キャラクタオブジェクトによって行われた、前記オブジェクトを移動させるための前記動作の種類に基づいて、前記待機時間を設定する待機時間設定手段を含むことを特徴とする。
【0008】
また、本発明に係る画像処理装置の制御方法は、仮想空間内を移動するオブジェクトを仮想カメラから見た様子を表す画像を生成する画像処理装置の制御方法において、前記オブジェクトを移動させるオブジェクト制御ステップと、前記オブジェクトの移動に基づいて、前記仮想カメラを移動させる仮想カメラ制御ステップと、前記仮想空間を前記仮想カメラから見た様子を表す画像を生成する画像生成ステップと、を含み、前記仮想カメラ制御ステップは、前記オブジェクトの移動方向に対応する方向を前記仮想カメラの移動方向として決定する移動方向決定ステップと、前記オブジェクトの移動が開始されてから待機時間が経過するまで、前記移動方向決定ステップにおいて決定された移動方向への前記仮想カメラの移動を待機させる待機ステップと、前記待機時間が経過した場合、前記移動方向決定ステップにおいて決定された移動方向に前記仮想カメラを加速させる加速ステップと、を含み、前記オブジェクトは、前記オブジェクトを移動させるための動作をキャラクタオブジェクトが行った結果として、前記仮想空間内を移動し、前記待機ステップは、前記キャラクタオブジェクトによって行われた、前記オブジェクトを移動させるための前記動作の種類に基づいて、前記待機時間を設定する待機時間設定ステップを含むことを特徴とする。
【0009】
また、本発明に係るプログラムは、仮想空間内を移動するオブジェクトを仮想カメラから見た様子を表す画像を生成する画像処理装置としてコンピュータを機能させるためのプログラムであって、前記オブジェクトを移動させるオブジェクト制御手段、前記オブジェクトの移動に基づいて、前記仮想カメラを移動させる仮想カメラ制御手段、及び、前記仮想空間を前記仮想カメラから見た様子を表す画像を生成する画像生成手段、として前記コンピュータを機能させ、前記仮想カメラ制御手段は、前記オブジェクトの移動方向に対応する方向を前記仮想カメラの移動方向として決定する移動方向決定手段と、前記オブジェクトの移動が開始されてから待機時間が経過するまで、前記移動方向決定手段によって決定された移動方向への前記仮想カメラの移動を待機させる待機手段と、前記待機時間が経過した場合、前記移動方向決定手段によって決定された移動方向に前記仮想カメラを加速させる加速手段と、を含み、前記オブジェクトは、前記オブジェクトを移動させるための動作をキャラクタオブジェクトが行った結果として、前記仮想空間内を移動し、前記待機手段は、前記キャラクタオブジェクトによって行われた、前記オブジェクトを移動させるための前記動作の種類に基づいて、前記待機時間を設定する待機時間設定手段を含むことを特徴とするプログラムである。
【0010】
また、本発明に係る情報記憶媒体は、上記プログラムを記録したコンピュータ読み取り可能な情報記憶媒体である。
【0011】
本発明によれば、仮想空間内を移動するオブジェクトを仮想カメラから見た様子を表す画面を表示部に表示させる場合における仮想カメラの移動制御を向上させることが可能になる。
【0012】
また本発明の一態様では、前記加速手段は、前記加速手段によって前記仮想カメラが加速される場合における上限速度を、前記オブジェクトの速度に基づいて設定する加速時上限速度設定手段を含み、前記仮想カメラの速度が該上限速度を超えないようにしつつ、前記仮想カメラを加速させるようにしてもよい。
【0013】
また本発明の一態様では、前記加速時上限速度設定手段は、1よりも大きく、かつ、2以下である係数を前記オブジェクトの速度に乗じることによって得られる速度に基づいて、前記加速手段によって前記カメラが加速される場合における上限速度を設定するようにしてもよい。
【0014】
また本発明の一態様では、前記仮想カメラ制御手段は、前記加速手段によって前記仮想カメラが加速されている場合において、前記仮想カメラと前記オブジェクトとの位置関係が所定の位置関係になった場合、前記仮想カメラを減速させる減速手段を含み、前記減速手段は、前記減速手段によって前記カメラが減速される場合における上限速度を、前記仮想カメラの速度が最も速かった時の前記仮想カメラの速度と、前記オブジェクトの速度と、に基づいて設定する減速時上限速度設定手段を含み、前記仮想カメラの速度が該上限速度を下回るようにしつつ、前記仮想カメラを減速させるようにしてもよい。
【0015】
また本発明の一態様では、前記減速時上限速度設定手段は、前記仮想カメラの速度が最も速かった時の前記仮想カメラの前記速度と、前記オブジェクトの現在の速度と、の中間値に基づいて、前記減速手段によって前記カメラが減速される場合における上限速度を設定するようにしてもよい。
【0016】
また本発明の一態様では、前記所定の位置関係は、前記移動方向決定手段によって決定された移動方向に前記仮想カメラが移動する場合の前記仮想カメラの移動経路上に前記オブジェクトの位置を射影してなる射影位置と、前記仮想カメラの位置と、の間の距離に関する距離情報が基準値以内であるような位置関係であるようにしてもよい。
【0017】
また本発明の一態様では、前記所定の位置関係は、前記移動方向決定手段によって決定された移動方向に前記仮想カメラが移動する場合の前記仮想カメラの移動経路上に前記オブジェクトの位置を射影してなる射影位置よりも前記仮想カメラの位置が前記仮想カメラの進行方向側にあり、かつ、前記仮想カメラと前記移動物体オブジェクトとの間の距離に関する距離情報が基準値以上であるような位置関係であってもよい。
【図面の簡単な説明】
【0018】
【図1】本発明の実施形態に係るゲーム装置のハードウェア構成を示す図である。
【図2】ゲーム空間の一例を示す図である。
【図3】ゲーム画面の一例を示す図である。
【図4】本発明の実施形態に係るゲーム装置の機能ブロック図である。
【図5】仮想カメラの移動方向の決定方法の一例について説明するための図である。
【図6】待機時間データの一例を示す図である。
【図7】ボールの移動が開始されてから待機時間が経過した場合のボールと仮想カメラとの位置関係の一例を示す図である。
【図8】仮想カメラとボールとの所定の位置関係の一例について説明するための図である。
【図9】仮想カメラとボールとの所定の位置関係の他の一例について説明するための図である。
【図10】仮想カメラの減速が開始された後のボールと仮想カメラとの位置関係の一例を示す図である。
【図11】ゲーム装置が実行する処理の一例を示すフロー図である。
【図12】仮想カメラとボールとの所定の位置関係の他の一例について説明するための図である。
【発明を実施するための形態】
【0019】
以下、本発明の実施形態の例について図面に基づき詳細に説明する。以下では、画像処理装置の一態様であるゲーム装置に本発明を適用する場合について説明する。本発明の実施形態に係るゲーム装置は、例えば家庭用ゲーム機(据置型ゲーム機)、携帯ゲーム機、携帯電話機、携帯情報端末(PDA)、又はパーソナルコンピュータ等によって実現される。ここでは、本発明の実施形態に係るゲーム装置を家庭用ゲーム機によって実現する場合について説明する。
【0020】
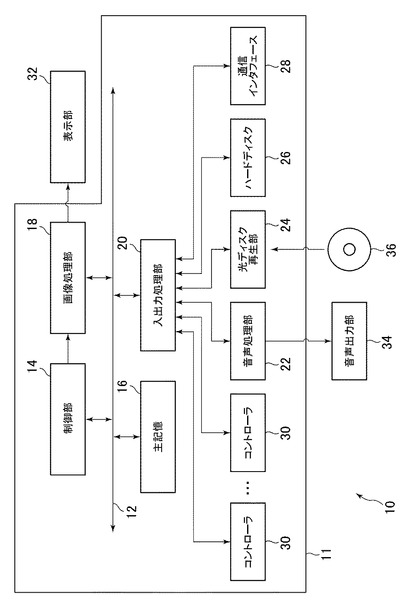
図1は、本発明の実施形態に係るゲーム装置のハードウェア構成を示す。図1に示すゲーム装置10は、家庭用ゲーム機11、表示部32、音声出力部34、及び光ディスク36(情報記憶媒体)を含む。表示部32及び音声出力部34は家庭用ゲーム機11に接続される。例えば家庭用テレビ受像機又は液晶ディスプレイ等が表示部32として用いられ、例えば家庭用テレビ受像機に内蔵されたスピーカ又はヘッドホン等が音声出力部34として用いられる。
【0021】
家庭用ゲーム機11は公知のコンピュータシステムである。家庭用ゲーム機11は、バス12、制御部14、主記憶16、画像処理部18、入出力処理部20、音声処理部22、光ディスクドライブ24、ハードディスク26、通信インタフェース28、及びコントローラ30を含む。
【0022】
制御部14は一又は複数のマイクロプロセッサを含む。制御部14は、光ディスク36から読み出されるプログラムに基づいて、各部の制御処理や情報処理を実行する。主記憶16は例えばRAMを含み、光ディスク36から読み出されたプログラム及びデータが主記憶16に書き込まれる。主記憶16は制御部14の作業用メモリとしても用いられる。バス12はアドレス及びデータを家庭用ゲーム機11の各部でやり取りするためのものである。
【0023】
画像処理部18はVRAMを含み、制御部14から供給される画像データに基づいてVRAM上に画面を描画する。VRAM上に描画された画面はビデオ信号に変換されて表示部32に出力される。
【0024】
入出力処理部20は、制御部14が音声処理部22、光ディスクドライブ24、ハードディスク26、通信インタフェース28、及びコントローラ30にアクセスするためのインタフェースである。音声処理部22はサウンドバッファを含み、光ディスク36からサウンドバッファに読み出された音声データを音声出力部34から出力する。通信インタフェース28は、インターネット等の通信ネットワークに家庭用ゲーム機11を有線又は無線接続するためのインタフェースである。
【0025】
光ディスクドライブ24は、光ディスク36に記録されたプログラムやデータを読み取る。ここでは、プログラムやデータを家庭用ゲーム機11に供給するために光ディスク36を用いるが、メモリカード等、他の情報記憶媒体を用いるようにしてもよい。また、例えば通信ネットワークを介して遠隔地からプログラムやデータを家庭用ゲーム機11に供給するようにしてもよい。ハードディスク26は一般的なハードディスク装置(補助記憶装置)である。なお、光ディスク36に記憶されることとして説明するプログラムやデータはハードディスク26に記憶されていてもよい。また、ハードディスク26の代わりに、ソリッドステートドライブがゲーム装置10に備えられるようにしてもよい。
【0026】
コントローラ30はユーザが操作を行うための操作部である。家庭用ゲーム機11には複数のコントローラ30を有線又は無線接続することが可能になっている。入出力処理部20は一定周期毎(例えば1/60秒ごと)にコントローラ30の各操作部材の操作状態をスキャンし、そのスキャン結果を表す操作信号をバス12を介して制御部14に供給する。制御部14は操作信号に基づいてユーザのゲーム操作を判定する。
【0027】
ゲーム装置10では各種ゲームが実行される。例えば、仮想空間内をオブジェクトが移動するゲームが実行される。
【0028】
以下では、移動物体(例えばボール又はパック等)を用いて行われるスポーツ競技を模したゲームが実行される場合について説明する。具体的には、サッカーゲームが実行される場合の例について説明する。このサッカーゲームでは、ユーザが操作するユーザチーム(ユーザキャラクタグループ)と敵チーム(敵キャラクタグループ)との間のサッカーの試合が行われる。なお、敵チームを操作するのはコンピュータであってもよいし、他のユーザであってもよい。ただし、以下では、敵チームがコンピュータによって操作される場合について説明する。
【0029】
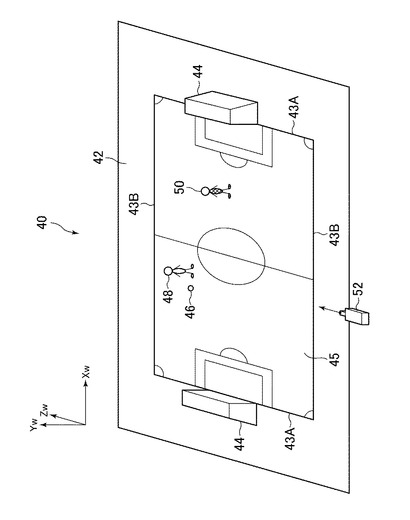
サッカーゲームが実行される場合、仮想空間が主記憶16に構築される。図2は仮想空間の一例を示す。図2に示す仮想空間40は、互いに直交する3つの座標軸(Xw軸、Yw軸、及びZw軸)が設定された仮想的な3次元空間である。仮想空間40に配置されるオブジェクトの位置等はこれらの3つの座標軸によって示される。
【0030】
図2に示すように、仮想空間40には、サッカーフィールドを表すオブジェクトであるフィールド42が配置される。フィールド42上には2本のゴールライン43Aと2本のタッチライン43Bとが表されている。2本のゴールライン43Aと2本のタッチライン43Bとに囲まれた領域であるピッチ45内でサッカーの試合が行われる。
【0031】
また、フィールド42上には、サッカーのゴールを表すオブジェクトであるゴール44と、サッカーボールを表すオブジェクトであるボール46(移動物体オブジェクト)と、ユーザチームに所属するサッカー選手を表すオブジェクトである選手キャラクタ48と、敵チームに所属するサッカー選手を表すオブジェクトである選手キャラクタ50と、が配置される。図2では省略されているが、フィールド42上には、ユーザチームに所属する11人の選手キャラクタ48と、敵チームに所属する11人の選手キャラクタ50と、が配置される。
【0032】
ゴール44の一方はユーザチームに関連づけられ、他方は敵チームに関連づけられる。いずれか一方のチームに関連づけられたゴール44内にボール46が移動すると、他方のチームの得点イベントが発生する。
【0033】
選手キャラクタ48(50)とボール46とが近づくと、所定条件の下、その選手キャラクタ48(50)とボール46とが関連づけられる。この場合、選手キャラクタ48(50)の移動動作はドリブル動作になる。以下では、選手キャラクタ48(50)にボール46が関連づけられた状態のことを「選手キャラクタ48(50)がボール46を保持している」というように記載する。
【0034】
また、仮想空間40には仮想カメラ52(視点)が設定される。この仮想カメラ52から見た仮想空間40を表すゲーム画面が表示部32に表示される。例えば、ボール46が常にゲーム画面に表示されるように、仮想カメラ52はボール46の移動に基づいて移動する。
【0035】
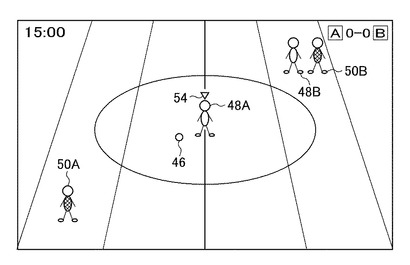
図3はゲーム画面の一例を示す。図3に示すゲーム画面には4人の選手キャラクタ48A,48B,50A,50Bが表示されている。そのうち、2人の選手キャラクタ48A,48Bはユーザチームに所属する選手キャラクタ48であり、残りの2人の選手キャラクタ50A,50Bは敵チームに所属する選手キャラクタ50である。
【0036】
このサッカーゲームでは、ユーザチームに所属する選手キャラクタ48のうちのいずれかがユーザの操作対象に設定される。図3に示すゲーム画面では選手キャラクタ48Aの頭上にカーソル54が表示されている。カーソル54は、ユーザの操作対象になっている選手キャラクタ48を案内する役割を果たす。なお、ユーザの操作対象はユーザチームに所属する選手キャラクタ48のうちで切り替えられる。
【0037】
ユーザの操作対象になっている選手キャラクタ48はユーザの操作に基づいて行動する。例えば、ユーザの操作対象になっている選手キャラクタ48は、ユーザによって行われた方向指示操作によって指示された方向に移動する。ユーザチームに所属する選手キャラクタ48のうちの、ユーザの操作対象になっていない選手キャラクタ48はAI(人工知能)に従って行動する。また、敵チームに所属する選手キャラクタ50もAIに従って行動する。
【0038】
以下、上記のサッカーゲームにおいて、ボール46(移動物体オブジェクト)の移動に応じて仮想カメラ52を好適に移動させるための技術について説明する。ここでは、特に、選手キャラクタ48(50)がショートパス、ロングパス、又はシュートを行ったことによってボール46が蹴り出された場合に仮想カメラ52をボール46の移動に応じて好適に移動させるための技術について説明する。
【0039】
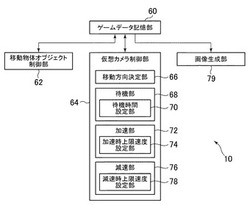
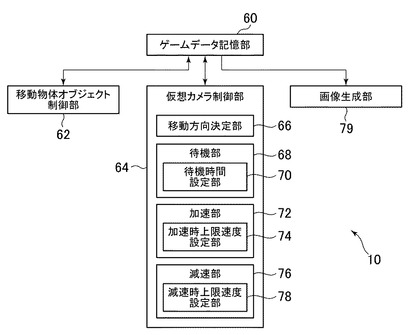
図4は、ゲーム装置10で実現される機能のうち、本発明に関連する機能ブロックを示す機能ブロック図である。図4に示すように、ゲーム装置10は、データ記憶部60、移動物体オブジェクト制御部62、仮想カメラ制御部64、及び画像生成部79を含む。データ記憶部60は例えば主記憶16及び光ディスク36によって実現され、その他の機能ブロックは制御部14が光ディスク36から読み出されたプログラムを実行することによって実現される。
【0040】
まず、データ記憶部60について説明する。データ記憶部60は、仮想空間40に配置される各オブジェクトに関するデータを記憶する。例えば、各オブジェクトのモデルデータがデータ記憶部60に記憶される。また例えば、位置及び姿勢等が変化する動的オブジェクトの状態データ(位置、移動方向や、速度等)がデータ記憶部60に記憶される。なお、本実施形態の場合、ボール46や選手キャラクタ48,50が「動的オブジェクト」に相当している。さらに例えば、仮想カメラ52の状態データ(位置、視線方向、及び画角等)もデータ記憶部60に記憶される。
【0041】
なお、以上の他、例えば、選手キャラクタ48,50のモーションデータ、選手キャラクタ48,50のパラメータデータ、両チームの得点状況を示す得点データや、試合の経過時間を示す経過時間データがデータ記憶部60に記憶される。
【0042】
移動物体オブジェクト制御部62について説明する。移動物体オブジェクト制御部62は移動物体オブジェクトを仮想空間40内で移動させる。例えば、移動物体オブジェクトを移動させるための動作をキャラクタオブジェクトが行った場合に、移動物体オブジェクト制御部62は移動物体オブジェクトを仮想空間40内で移動させる。
【0043】
本実施形態の場合、ボール46が「移動物体オブジェクト」に相当している。例えば、ボール46を移動させるための動作を選手キャラクタ48(50)が行った場合に、移動物体オブジェクト制御部62はボール46を仮想空間40内で移動させる。「ボール46を移動させるための動作」とは、ショートパス、ロングパス、シュート、又はクリア等である。なお、「クリア」とは、自チームのゴール44付近にボール46がある場合に失点を避けるべくボール46を大きく蹴り出すことによってボール46を自チームのゴール44から遠ざける動作である。
【0044】
仮想カメラ制御部64について説明する。仮想カメラ制御部64は移動物体オブジェクトの移動に基づいて仮想カメラを移動させる。仮想カメラ制御部64は、移動方向決定部66、待機部68、加速部72、及び減速部76を含んでいる。以下、これらの機能ブロックについて説明する。
【0045】
移動方向決定部66について説明する。移動物体オブジェクトが移動を開始したり、移動物体オブジェクトの移動方向が変化したりする場合、移動方向決定部66は、移動物体オブジェクトの移動方向に対応する方向を仮想カメラ52の移動方向として決定する。
【0046】
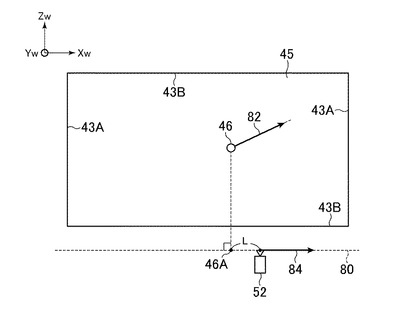
「移動物体オブジェクトの移動方向に対応する方向」とは、移動物体オブジェクトの移動方向と所定の相対関係を有する方向である。例えば、「移動物体オブジェクトの移動方向に対応する方向」とは、移動物体オブジェクトの移動方向と平行な方向である。また例えば、仮想カメラ52の移動経路が予め定められている場合、「移動物体オブジェクトの移動方向に対応する方向」とは、移動物体オブジェクトの移動方向を仮想カメラ52の移動経路上に射影することによって得られるような方向である(後述の図5参照)。
【0047】
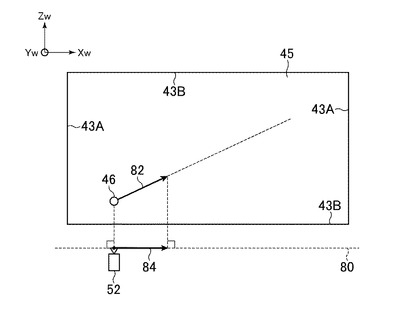
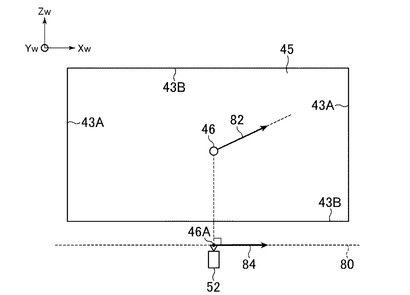
図5は仮想カメラ52の移動方向の決定方法の一例について説明するための図である。図5はピッチ45を真上から見た様子を表している。本実施形態の場合、図5に示すように、仮想カメラ52はタッチライン43B(言い換えればXw軸方向)と平行に移動するようになっている。つまり、仮想カメラ52の移動経路80はタッチライン43B(言い換えればXw軸方向)と平行になっている。図5に示すように、移動方向決定部66は、ボール46の移動方向82を仮想カメラ52の移動経路80上に射影することによって得られる方向84を、仮想カメラ52の移動方向として決定する。
【0048】
待機部68について説明する。待機部68は、移動物体オブジェクトの移動が開始されてから待機時間が経過するまで、移動方向決定部66によって決定された移動方向への仮想カメラ52の移動(すなわち、移動物体オブジェクトの該移動に応じた仮想カメラ52の移動)を待機させる。
【0049】
待機部68は待機時間設定部70を含んでいる。移動物体オブジェクトを移動させるための動作をキャラクタオブジェクトが行った結果として移動物体オブジェクトが移動するような場合に、待機時間設定部70は、キャラクタオブジェクトによって行われた、移動物体オブジェクトを移動させるための動作の種類に基づいて、待機時間を設定する。
【0050】
本実施形態における待機時間設定部70は、ボール46を移動させるための動作を選手キャラクタ48(50)が行った場合に、選手キャラクタ48(50)によって行われた動作の種類に基づいて待機時間を設定する。
【0051】
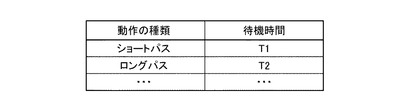
本実施形態の場合、選手キャラクタ48(50)によって行われた動作の種類に基づいて待機時間を設定するための待機時間データがデータ記憶部60に記憶される。図6は待機時間データの一例を示している。図6に示す待機時間データは、ボール46を移動させるための動作の種類と、待機時間と、の対応関係を示すデータになっている。この待機時間データでは、「ショートパス」又は「ロングパス」が行われた場合の待機時間が定められている。図6において、「T1」及び「T2」は所定の時間を示しており、「T2」は「T1」よりも長い時間を示している。図6に示す待機時間データでは、「ショートパス」よりもボール46を遠くに移動させるための「ロングパス」の待機時間(T2)が、「ショートパス」の待機時間(T1)よりも長くなっている。すなわち、図6に示す待機時間データでは、ボール46が大きく移動する可能性がある動作を選手キャラクタ48(50)が行う場合には待機時間が長くなるように設定されている。
【0052】
待機時間設定部70は、ボール46を移動させるための動作を選手キャラクタ48(50)が行った場合に、選手キャラクタ48(50)によって行われた動作の種類と、上記の待機時間データと、に基づいて待機時間を設定する。すなわち、待機時間設定部70は上記の待機時間データを参照し、選手キャラクタ48(50)によって行われた動作の種類に対応づけられた待機時間を取得する。そして、待機部68は、ボール46の移動が開始されてから(言い換えれば、ボール46を移動させるための動作を選手キャラクタ48(50)が行ってから)、取得された待機時間が経過するまで、移動方向決定部66によって決定された移動方向への仮想カメラ52の移動を待機させる。
【0053】
加速部72について説明する。移動物体オブジェクトの移動が開始されてから待機時間が経過した場合、加速部72は、移動方向決定部66によって決定された移動方向に仮想カメラ52を移動開始させる。加速部72は、仮想カメラ52の速度が第1上限速度を超えないようにしつつ、移動方向決定部66によって決定された移動方向に仮想カメラ52を加速させる。
【0054】
加速部72は加速時上限速度設定部74を含んでいる。加速時上限速度設定部74は移動物体オブジェクトの速度に基づいて第1上限速度を設定する。例えば、加速時上限速度設定部74は、1よりも大きく、かつ、2以下のである係数を移動物体オブジェクトの速度に乗じることによって得られる速度に基づいて、第1上限速度を設定する。
【0055】
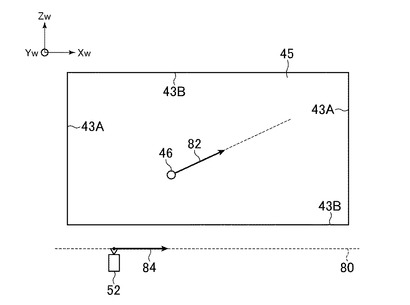
以下、加速部72及び加速時上限速度設定部74の具体的な動作例について詳しく説明する。図7はボール46の移動が開始されてから待機時間が経過した場合のボール46と仮想カメラ52との位置関係の一例を示している。本実施形態では、ボール46の移動が開始されてから待機時間が経過した場合、加速部72は、移動方向決定部66によって決定された移動方向(方向84)に仮想カメラ52を移動開始させる。
【0056】
例えば、加速部72は仮想カメラ52の速度(VC)を下記の式(1)に従って設定する。なお、下記の式(1)において、「VCo」は仮想カメラ52の初速度を示している。また、「A1」は一定の加速度を示しており、「T」は仮想カメラ52の移動が開始されてからの経過時間を示している。
VC=VCo+A1*T ・・・ (1)
【0057】
仮想カメラ52の初速度(VCo)及び加速度(A1)としては、仮想カメラ52がボール46に追いつき、かつ、追い越すことができるような初速度及び加速度が設定される。なお、「仮想カメラ52がボール46に追いつく」とは、例えば、移動方向決定部66によって決定された移動方向に仮想カメラ52が移動する場合の仮想カメラ52の移動経路80上にボール46の現在の位置を射影してなる射影位置に仮想カメラ52の位置が一致することを意味する。詳細については後述する(図8参照)。また、「仮想カメラ52がボール46を追い越す」とは、例えば、仮想カメラ52の位置が上記の射影位置よりも仮想カメラ52の進行方向側にあることを意味する。
【0058】
また、加速時上限速度設定部74は、仮想カメラ52が加速される場合の上限速度である第1上限速度(V1max)を下記の式(2)に従って設定する。なお、下記の式(2)において、「K」は1よりも大きく、かつ2以下である係数を示している。例えば、「K」は「2」に設定される。また、「VB」はボール46の現在速度を示している。より詳しくは、「VB」は、ボール46の現在速度のXw軸方向成分(すなわち、仮想カメラ52の移動方向)を示している。
V1max=K*VB ・・・ (2)
【0059】
上記の式(1)によって算出された速度(VC)が、上記の式(2)によって算出された第1上限速度(V1max)を超える場合、加速部72は仮想カメラ52の速度を第1上限速度(V1max)に設定する。
【0060】
減速部76について説明する。加速部72によって仮想カメラ52が制御されている場合において、仮想カメラ52と移動物体オブジェクトとの位置関係が所定の位置関係になった場合に、加速部72による仮想カメラ52の制御が中止される。この場合、減速部76は、仮想カメラ52を、仮想カメラ52の速度が第2上限速度を下回るようにしつつ減速させる。
【0061】
減速部76は減速時上限速度設定部78を含んでいる。減速時上限速度設定部78は、仮想カメラ52の速度が最も速かった時の仮想カメラ52の速度と、移動物体オブジェクトの現在の速度と、に基づいて、第2上限速度を設定する。具体的には、減速時上限速度設定部78は、仮想カメラ52の速度が最も速かった時の仮想カメラ52の速度と、移動物体オブジェクトの現在の速度と、の間の速度を第2上限速度として設定する。例えば、減速時上限速度設定部78は、仮想カメラ52の速度が最も速かった時の仮想カメラ52の速度と、移動物体オブジェクトの現在の速度と、の中間値に基づいて、第2上限速度を設定する。より具体的には、減速時上限速度設定部78は、仮想カメラ52の速度が最も速かった時の仮想カメラ52の速度と、移動物体オブジェクトの現在の速度と、の中間値を第2上限速度として設定する。
【0062】
以下、減速部76及び減速時上限速度設定部78の具体的な動作例について詳しく説明する。
【0063】
加速部72によって仮想カメラ52が制御されている場合、ゲーム装置10は仮想カメラ52とボール46との位置関係が所定の位置関係になったか否かを判定する。「所定の位置関係」とは、例えば、仮想カメラ52がボール46に追いついたとみなすことができるような仮想カメラ52とボール46との位置関係である。
【0064】
図8は「所定の位置関係」の一例を説明するための図である。図8において、符号46Aは、移動方向決定部66によって決定された移動方向に仮想カメラ52が移動する場合の仮想カメラ52の移動経路80上にボール46の現在位置を射影してなる位置を示している。ゲーム装置10は、この射影位置46Aと仮想カメラ52の現在位置とが一致したか否かを判定する。射影位置46Aと仮想カメラ52の現在位置とが一致した場合、ゲーム装置10は仮想カメラ52とボール46との位置関係が所定の位置関係になったと判定する。
【0065】
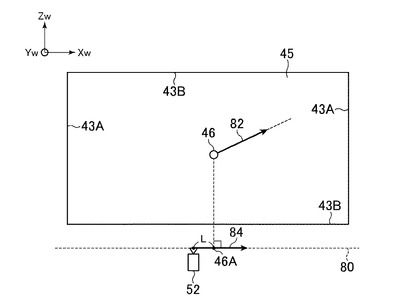
図9は「所定の位置関係」の他の一例を説明するための図である。ゲーム装置10は、上記の射影位置46Aと仮想カメラ52の現在位置との間の距離(L)が基準値以下になったか否かを判定するようにしてもよい。上記の距離(L)が基準値以下になった場合、ゲーム装置10は仮想カメラ52がボール46に追いついたとみなすようにしてもよい。すなわち、上記の距離(L)が基準値以下になった場合、ゲーム装置10は仮想カメラ52とボール46との位置関係が所定の位置関係になったと判定するようにしてもよい。なお、上記の基準値を零に設定すると、ゲーム装置10は仮想カメラ52とボール46との位置関係が図8に示す位置関係になったか否かを判定することになる。
【0066】
仮想カメラ52とボール46との位置関係が所定の位置関係になった場合、減速部76は仮想カメラ52の減速を開始させる。例えば、減速部76は仮想カメラ52の速度(VC)を下記の式(3)に従って設定する。なお、下記の式(3)において、「VCmax」は、仮想カメラ52の減速が開始される直前の仮想カメラ52の速度(すなわち、仮想カメラ52の速度が最も速くなった時の仮想カメラ52の速度、さらに言い換えれば、仮想カメラ52とボール46との位置関係が所定の位置関係になった場合の仮想カメラ52の速度)を示している。また、「A2」は一定の減速度を示しており、「T」は仮想カメラ52の減速が開始されてからの経過時間を示している。
VC=VCmax−A2*T ・・・ (3)
【0067】
また、減速時上限速度設定部78は、仮想カメラ52が減速される場合の上限速度である第2上限速度(V2max)を下記の式(4)に従って設定する。なお、下記の式(4)において、「VB」はボール46の現在速度を示している。
V2max=(VCmax+VB)/2 ・・・ (4)
【0068】
上記の式(3)によって算出された速度(VC)が、上記の式(4)によって算出された第2上限速度(V2max)を超える場合、減速部76は仮想カメラ52の速度を第2上限速度(V2max)に設定する。
【0069】
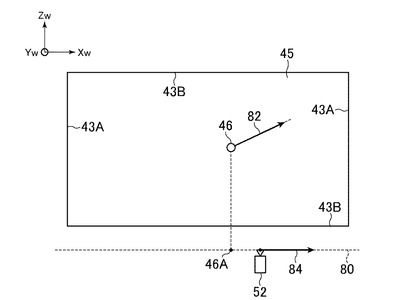
仮想カメラ52とボール46との位置関係が所定の位置関係になった時点(例えば、仮想カメラ52がボール46に追いついた時点)で仮想カメラ52の速度はボール46の速度よりも速いため、例えば図10に示すように、仮想カメラ52はボール46を追い越すことになる。そして、仮想カメラ52の速度がボール46の速度以下に減速されるまでの間、仮想カメラ52とボール46との間の距離は徐々に大きくなる。しかし、仮想カメラ52の速度がボール46の速度未満まで減速されると、仮想カメラ52とボール46との間の距離は徐々に小さくなる。そして、仮想カメラ52とボール46との間の位置関係が所定の位置関係になった場合、仮想カメラ52の減速は終了される。ここで、「所定の位置関係」とは、例えば、上記の射影位置46Aと仮想カメラ52の現在位置との間の距離(L)が基準値以下であるような位置関係である。仮想カメラ52の減速が終了された場合、仮想カメラ52の制御方法は通常の制御方法となる。
【0070】
画像生成部79について説明する。画像生成部79は、仮想空間40内を移動する移動物体オブジェクトを仮想カメラ52から見た様子を表す画像を生成する。すなわち、本実施形態の場合、画像生成部79は、仮想空間40内を移動するボール46を仮想カメラ52から見た様子を表す画像を生成する。
【0071】
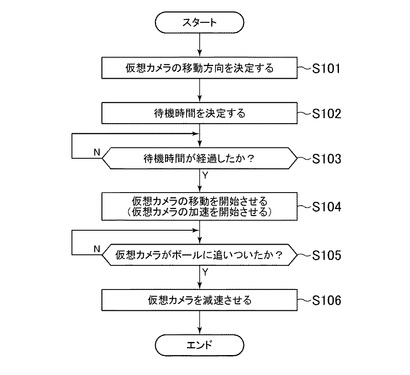
次に、ゲーム装置10で実行される処理について説明する。ここでは、選手キャラクタ48(50)によってパスが行われた場合に実行される仮想カメラ52の制御処理について説明する。図11は、選手キャラクタ48(50)によってパスが行われた場合に実行される仮想カメラ52の制御処理の一例を示すフロー図である。制御部14が光ディスク36から読み出されたプログラムに従って図11に示す処理を実行することによって、制御部14が仮想カメラ制御部64として機能するようになる。なお、図11に示す処理と並行して、ボール46や各選手キャラクタ48,50の状態を更新したり、表示部32に表示される画面を更新したりするための処理が所定時間(例えば1/60秒)ごとに実行されることになる。
【0072】
図11に示すように、選手キャラクタ48(50)によってパスが行われた場合、まず、制御部14(移動方向決定部66)は仮想カメラ52の移動方向を決定する(S101)。例えば図5において説明したように、制御部14は、ボール46の移動方向82(すなわち、パス方向)を示すベクトルを仮想カメラ52の移動経路80上に射影することによって得られるベクトルが示す方向84を、仮想カメラ52の移動方向として決定する。
【0073】
なお、ここでは、仮想カメラ52が予め定められた移動経路80上を移動することとしたが、仮想カメラ52の移動経路は予め定められていなくてもよい。例えば、仮想カメラ52はボール46の移動方向と平行に移動するようにしてもよい。その場合、制御部14は、ボール46の移動方向を示すベクトルと平行なベクトルが示す方向を仮想カメラ52の移動方向として決定する。
【0074】
ステップS101の処理が実行された後、制御部14(待機時間設定部70)は、仮想カメラ52の移動を開始するまでの待機時間を決定する(S102)。例えば、制御部14は待機時間データ(図6)を参照し、選手キャラクタ48(50)によって行われたパスの種類に対応づけられた待機時間を取得する。なお、ステップS101及びステップS102の処理はどちらが先に実行されてもよい。
【0075】
ステップS102の処理が実行された後、制御部14(待機部68)は、ボール46の移動が開始されてから(言い換えれば、選手キャラクタ48(50)によってパスが行われてから)待機時間が経過したか否かを判定する(S103)。ここで用いられる「待機時間」はステップS102で決定された待機時間である。
【0076】
待機時間が経過していないと判定された場合、制御部14(待機部68)は、後述のステップS104の処理を実行せずに、待機時間が経過したか否かの監視を続行する(S103)。一方、待機時間が経過したと判定された場合、制御部14(加速部72)は仮想カメラ52の移動を開始させる(S104)。すなわち、制御部14は、ステップS101で決定された移動方向に仮想カメラ52を加速させる。
【0077】
この場合、仮想カメラ52の加速は、後述のステップS105において仮想カメラ52がボール46に追いついたと判定されるまでの間にわたって継続される。なお、この間、制御部14は上記の式(1)に従って仮想カメラ52の速度を設定し、該速度に基づいて仮想カメラ52の位置を更新していく。また、この間、制御部14(加速時上限速度設定部74)は上記の式(2)に従って仮想カメラ52の上限速度(第1上限速度)を設定する。そして、制御部14は上記の式(1)に従って算出される速度がこの上限速度を超えるか否かを判定する。上記の式(1)に従って算出される速度がこの上限速度を超える場合、制御部14は仮想カメラ52の速度をこの上限速度に設定する。
【0078】
仮想カメラ52の移動が開始された後(すなわち、仮想カメラ52の加速が開始された後)、制御部14は仮想カメラ52がボール46に追いついたか否かを判定する(S105)。
【0079】
例えば図8に示したように、制御部14は、ボール46の現在位置を仮想カメラ52の移動経路80上に射影してなる射影位置46Aと、仮想カメラ52の現在位置と、が一致しているか否かを判定する。そして、射影位置46Aと仮想カメラ52の現在位置とが一致している場合に、制御部14は仮想カメラ52がボール46に追いついたと判定する。
【0080】
または、例えば図9に示したように、制御部14は、ボール46の現在位置を仮想カメラ52の移動経路80上に射影してなる射影位置46Aと、仮想カメラ52の現在位置と、の間の距離(L)が基準値以下であるか否かを判定するようにしてもよい。そして、該距離(L)が基準値以下である場合に、制御部14は仮想カメラ52がボール46に追いついたと判定するようにしてもよい。
【0081】
ステップS105において仮想カメラ52がボール46に追いついたと判定されなかった場合、制御部14は、仮想カメラ52がボール46に追いついたか否かの監視を続行する(S105)。なお、この場合、仮想カメラ52の加速も続行される。
【0082】
一方、ステップS105において仮想カメラ52がボール46に追いついたと判定された場合、制御部14は仮想カメラ52の加速を中止させる。そして、制御部14(減速部76)は仮想カメラ52を減速させる(S106)。この場合、制御部14は上記の式(3)に従って仮想カメラ52の速度を設定し、該速度に基づいて仮想カメラ52の位置を更新していく。また、この間、制御部14(減速時上限速度設定部78)は上記の式(4)に従って仮想カメラ52の上限速度(第2上限速度)を設定し、制御部14は上記の式(3)に従って算出される速度がこの上限速度を超えるか否かを判定する。上記の式(3)に従って算出される速度がこの上限速度を超える場合、制御部14は仮想カメラ52の速度をこの上限速度に設定する。
【0083】
仮想カメラ52の減速は、仮想カメラ52とボール46との位置関係が所定の位置関係になるまで継続される。例えば、仮想カメラ52とボール46との間の距離が基準値以下になった場合に、仮想カメラ52の減速は終了される。より詳しくは、上記の射影位置46Aと仮想カメラ52の現在位置との間の距離(L)が基準値以下になった場合に仮想カメラ52の減速が終了される。この場合、仮想カメラ52の制御方法が通常の制御方法に戻る。以上で図11に示す処理の説明を終了する。
【0084】
以上説明したゲーム装置10では、選手キャラクタ48(50)によってパスやシュートが行われた場合、ボール46の移動の開始に遅れて、仮想カメラ52の移動を開始させるようになっている。すなわち、ボール46の移動が開始された場合、待機時間(例えば数フレーム)が経過した後に仮想カメラ52の加速が開始され、仮想カメラ52がボール46に追いつくようになっている。
【0085】
特にゲーム装置10では、単に、仮想カメラ52の移動をボール46の移動の開始に遅れて開始させるだけでなく、仮想カメラ52の移動制御をさらに向上させるための構成が実現されている。
【0086】
すなわち、ゲーム装置10では、選手キャラクタ48(50)が行った動作の種類に応じて、上記の待機時間が設定されるようになっている。具体的には、ボール46が大きく移動する可能性がある動作を選手キャラクタ48(50)が行う場合には待機時間が長くなるようになっている(図6参照)。このため、例えば、選手キャラクタ48(50)がロングパスを行った場合には、待機時間が長く設定されることによって、仮想カメラ52が加速し始める際のボール46と仮想カメラ52との間の距離が大きくなることから、ボール46が大きく移動することがゲーム画面において強調されるようになる。その結果として、ボール46が大きく移動することがユーザから見て分かりやすくなっている。
【0087】
また、ゲーム装置10では、仮想カメラ52が加速される場合の上限速度がボール46の速度に基づいて設定されるようになっており、その結果として、仮想カメラ52がボール46に追いつくまでの間(言い換えれば、仮想カメラ52が加速される間)の仮想カメラ52の動きが不自然にならないように担保されるようになっている。例えば、ボール46の速度に比べて仮想カメラ52が速くなりすぎてしまうと、仮想カメラ52の動きが不自然であるとユーザが感じてしまう場合があるが、ゲーム装置10によれば、仮想カメラ52の上限速度がボール46の速度に基づいて設定されることによって、上記のような不都合が生じないように図ることが可能になる。
【0088】
さらに、ゲーム装置10では、仮想カメラ52がボール46に追いついた場合に仮想カメラ52が減速される。特にゲーム装置10では、仮想カメラ52が減速される場合の上限速度が仮想カメラ52が最も速かった際の速度とボール46の現在の速度とに基づいて設定されるようになっており、その結果として、仮想カメラ52が減速される間の仮想カメラ52の動きが不自然にならないように担保されるようになっている。
【0089】
なお、本発明は以上に説明した実施の形態に限定されるものではない。
【0090】
例えば、以上に説明した実施形態では、仮想カメラ52がボール46に追いついた場合に仮想カメラ52の減速が開始されるようになっていた(図8,9参照)。しかしながら、仮想カメラ52がボール46を追い越した場合に仮想カメラ52の減速が開始されるようにしてもよい。すなわち、図11のステップS105において、制御部14は仮想カメラ52がボール46を追い越したか否かを判定するようにしてもよい。
【0091】
制御部14は、仮想カメラ52とボール46との位置関係が、仮想カメラ52がボール46を追い越したとみなすことができるような所定の位置関係となったか否かを判定することによって、仮想カメラ52がボール46を追い越したか否かを判定する。図12はこの場合の「所定の位置関係」の一例を説明するための図である。例えば、ゲーム装置10は、仮想カメラ52の現在位置が上記の射影位置46Aよりも仮想カメラ52の進行方向側にあり、かつ、上記の射影位置46Aと仮想カメラ52の現在位置との間の距離(L)が基準値以上であるか否かを判定する。そして、仮想カメラ52の現在位置が上記の射影位置46Aよりも仮想カメラ52の進行方向側にあり、かつ、上記の射影位置46Aと仮想カメラ52の現在位置との間の距離(L)が基準値以上である場合、ゲーム装置10は仮想カメラ52がボール46を追い越したと判定する。
【0092】
なお、上記の基準値は零に設定するようにしてもよい。この場合、ゲーム装置10は、仮想カメラ52の現在位置が上記の射影位置46Aよりも仮想カメラ52の進行方向側にあるか否かを判定することになる。
【0093】
また例えば、本発明はサッカーゲーム以外のスポーツゲームにも適用することができる。本発明は、移動物体(例えばボール又はパック等)を用いて行われるスポーツ競技を模したゲーム(例えばバスケットボールゲーム、アイスホッケーゲーム、又は野球ゲーム等)に適用することができる。また、本発明は上記のスポーツゲーム以外のゲームにも適用することができる。本発明は、仮想空間内を移動するオブジェクトを仮想カメラから見た様子を表すゲーム画面が表示されるゲームに適用することができる。また、本発明はゲーム装置以外の画像処理装置にも適用することができる。本発明は、仮想空間内を移動するオブジェクトを仮想カメラから見た様子を表す画像を生成する画像処理装置に適用することができる。
【符号の説明】
【0094】
10 ゲーム装置、11 家庭用ゲーム機、12 バス、14 制御部、16 主記憶、18 画像処理部、20 入出力処理部、22 音声処理部、24 光ディスクドライブ、26 ハードディスク、28 通信インタフェース、30 コントローラ、32 表示部、34 音声出力部、36 光ディスク、40 ゲーム空間、42 フィールド、43A ゴールライン、43B タッチライン、44 ゴール、45 ピッチ、46 ボール、48,48A,48B,50,50A,50B 選手キャラクタ、52 仮想カメラ、54 カーソル、60 データ記憶部、62 移動物体オブジェクト制御部、64 仮想カメラ制御部、66 移動方向決定部、68 待機部、70 待機時間設定部、72 加速部、74 加速時上限速度設定部、76 減速部、78 減速時上限速度設定部、79 画像生成部、80 仮想カメラの移動経路、82 ボールの移動方向、84 仮想カメラの移動方向。
【技術分野】
【0001】
本発明は画像処理装置、画像処理装置の制御方法、及びプログラムに関する。
【背景技術】
【0002】
仮想空間内を移動するオブジェクトを仮想カメラから見た様子を表す画面を表示部に表示させる画像処理装置が知られている。例えば、ゲーム装置が上記のような画像処理装置として知られている。例えば、サッカーゲームを実行するゲーム装置では、ゲーム空間内を移動するボール(ボールオブジェクト)及び選手キャラクタ(選手オブジェクト)を仮想カメラから見た様子を表すゲーム画面が表示される。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2011−110323号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
上記のようなサッカーゲームでは、ボールがゲーム画面内に表示されるように、ボールの移動に基づいて仮想カメラの移動が制御される。この場合、ボールと仮想カメラとの位置関係が一定となるように、仮想カメラを移動させてしまうと、常にボールがゲーム画面内の同じ位置に表示されることになる。その結果、ユーザの目にはボールが仮想空間内を移動しているようには見えず、あたかも背景部分が移動しているかのように見えてしまい、ゲーム画面の表示が不自然であるとユーザが感じてしまう場合がある。
【0005】
上記のような不自然さをユーザに感じさせないようにするための方法としては、例えば、シュートやパスが選手キャラクタによって行われた場合に、ボールの移動の開始に遅れて、仮想カメラの移動を開始させる方法が考えられる。すなわち、ボールの移動が開始された場合に、待機時間(例えば数フレーム)が経過した後に仮想カメラの移動を開始させる方法が考えられる。しかしながら、このような方法を採用する場合には、単に、仮想カメラの移動をボールの移動の開始に遅れて開始させるだけでなく、ボールの移動の仕方(例えば距離等)がユーザから見て分かりやすくなるように、仮想カメラの移動制御をさらに向上させる必要がある。具体的には、例えば、選手キャラクタによってボールが大きく蹴り出された場合に、ボールが大きく移動することがユーザから見て分かりやすくなるように、仮想カメラの移動制御を向上させる必要がある。
【0006】
本発明は上記課題に鑑みてなされたものであって、その目的は、仮想空間内を移動するオブジェクトを仮想カメラから見た様子を表す画面を表示部に表示させる場合における仮想カメラの移動制御を向上させることが可能な画像処理装置、画像処理装置の制御方法、及びプログラムを提供することにある。
【課題を解決するための手段】
【0007】
上記課題を解決するために、本発明に係る画像処理装置は、仮想空間内を移動するオブジェクトを仮想カメラから見た様子を表す画像を生成する画像処理装置において、前記オブジェクトを移動させるオブジェクト制御手段と、前記オブジェクトの移動に基づいて、前記仮想カメラを移動させる仮想カメラ制御手段と、前記仮想空間を前記仮想カメラから見た様子を表す画像を生成する画像生成手段と、を含み、前記仮想カメラ制御手段は、前記オブジェクトの移動方向に対応する方向を前記仮想カメラの移動方向として決定する移動方向決定手段と、前記オブジェクトの移動が開始されてから待機時間が経過するまで、前記移動方向決定手段によって決定された移動方向への前記仮想カメラの移動を待機させる待機手段と、前記待機時間が経過した場合、前記移動方向決定手段によって決定された移動方向に前記仮想カメラを加速させる加速手段と、を含み、前記オブジェクトは、前記オブジェクトを移動させるための動作をキャラクタオブジェクトが行った結果として、前記仮想空間内を移動し、前記待機手段は、前記キャラクタオブジェクトによって行われた、前記オブジェクトを移動させるための前記動作の種類に基づいて、前記待機時間を設定する待機時間設定手段を含むことを特徴とする。
【0008】
また、本発明に係る画像処理装置の制御方法は、仮想空間内を移動するオブジェクトを仮想カメラから見た様子を表す画像を生成する画像処理装置の制御方法において、前記オブジェクトを移動させるオブジェクト制御ステップと、前記オブジェクトの移動に基づいて、前記仮想カメラを移動させる仮想カメラ制御ステップと、前記仮想空間を前記仮想カメラから見た様子を表す画像を生成する画像生成ステップと、を含み、前記仮想カメラ制御ステップは、前記オブジェクトの移動方向に対応する方向を前記仮想カメラの移動方向として決定する移動方向決定ステップと、前記オブジェクトの移動が開始されてから待機時間が経過するまで、前記移動方向決定ステップにおいて決定された移動方向への前記仮想カメラの移動を待機させる待機ステップと、前記待機時間が経過した場合、前記移動方向決定ステップにおいて決定された移動方向に前記仮想カメラを加速させる加速ステップと、を含み、前記オブジェクトは、前記オブジェクトを移動させるための動作をキャラクタオブジェクトが行った結果として、前記仮想空間内を移動し、前記待機ステップは、前記キャラクタオブジェクトによって行われた、前記オブジェクトを移動させるための前記動作の種類に基づいて、前記待機時間を設定する待機時間設定ステップを含むことを特徴とする。
【0009】
また、本発明に係るプログラムは、仮想空間内を移動するオブジェクトを仮想カメラから見た様子を表す画像を生成する画像処理装置としてコンピュータを機能させるためのプログラムであって、前記オブジェクトを移動させるオブジェクト制御手段、前記オブジェクトの移動に基づいて、前記仮想カメラを移動させる仮想カメラ制御手段、及び、前記仮想空間を前記仮想カメラから見た様子を表す画像を生成する画像生成手段、として前記コンピュータを機能させ、前記仮想カメラ制御手段は、前記オブジェクトの移動方向に対応する方向を前記仮想カメラの移動方向として決定する移動方向決定手段と、前記オブジェクトの移動が開始されてから待機時間が経過するまで、前記移動方向決定手段によって決定された移動方向への前記仮想カメラの移動を待機させる待機手段と、前記待機時間が経過した場合、前記移動方向決定手段によって決定された移動方向に前記仮想カメラを加速させる加速手段と、を含み、前記オブジェクトは、前記オブジェクトを移動させるための動作をキャラクタオブジェクトが行った結果として、前記仮想空間内を移動し、前記待機手段は、前記キャラクタオブジェクトによって行われた、前記オブジェクトを移動させるための前記動作の種類に基づいて、前記待機時間を設定する待機時間設定手段を含むことを特徴とするプログラムである。
【0010】
また、本発明に係る情報記憶媒体は、上記プログラムを記録したコンピュータ読み取り可能な情報記憶媒体である。
【0011】
本発明によれば、仮想空間内を移動するオブジェクトを仮想カメラから見た様子を表す画面を表示部に表示させる場合における仮想カメラの移動制御を向上させることが可能になる。
【0012】
また本発明の一態様では、前記加速手段は、前記加速手段によって前記仮想カメラが加速される場合における上限速度を、前記オブジェクトの速度に基づいて設定する加速時上限速度設定手段を含み、前記仮想カメラの速度が該上限速度を超えないようにしつつ、前記仮想カメラを加速させるようにしてもよい。
【0013】
また本発明の一態様では、前記加速時上限速度設定手段は、1よりも大きく、かつ、2以下である係数を前記オブジェクトの速度に乗じることによって得られる速度に基づいて、前記加速手段によって前記カメラが加速される場合における上限速度を設定するようにしてもよい。
【0014】
また本発明の一態様では、前記仮想カメラ制御手段は、前記加速手段によって前記仮想カメラが加速されている場合において、前記仮想カメラと前記オブジェクトとの位置関係が所定の位置関係になった場合、前記仮想カメラを減速させる減速手段を含み、前記減速手段は、前記減速手段によって前記カメラが減速される場合における上限速度を、前記仮想カメラの速度が最も速かった時の前記仮想カメラの速度と、前記オブジェクトの速度と、に基づいて設定する減速時上限速度設定手段を含み、前記仮想カメラの速度が該上限速度を下回るようにしつつ、前記仮想カメラを減速させるようにしてもよい。
【0015】
また本発明の一態様では、前記減速時上限速度設定手段は、前記仮想カメラの速度が最も速かった時の前記仮想カメラの前記速度と、前記オブジェクトの現在の速度と、の中間値に基づいて、前記減速手段によって前記カメラが減速される場合における上限速度を設定するようにしてもよい。
【0016】
また本発明の一態様では、前記所定の位置関係は、前記移動方向決定手段によって決定された移動方向に前記仮想カメラが移動する場合の前記仮想カメラの移動経路上に前記オブジェクトの位置を射影してなる射影位置と、前記仮想カメラの位置と、の間の距離に関する距離情報が基準値以内であるような位置関係であるようにしてもよい。
【0017】
また本発明の一態様では、前記所定の位置関係は、前記移動方向決定手段によって決定された移動方向に前記仮想カメラが移動する場合の前記仮想カメラの移動経路上に前記オブジェクトの位置を射影してなる射影位置よりも前記仮想カメラの位置が前記仮想カメラの進行方向側にあり、かつ、前記仮想カメラと前記移動物体オブジェクトとの間の距離に関する距離情報が基準値以上であるような位置関係であってもよい。
【図面の簡単な説明】
【0018】
【図1】本発明の実施形態に係るゲーム装置のハードウェア構成を示す図である。
【図2】ゲーム空間の一例を示す図である。
【図3】ゲーム画面の一例を示す図である。
【図4】本発明の実施形態に係るゲーム装置の機能ブロック図である。
【図5】仮想カメラの移動方向の決定方法の一例について説明するための図である。
【図6】待機時間データの一例を示す図である。
【図7】ボールの移動が開始されてから待機時間が経過した場合のボールと仮想カメラとの位置関係の一例を示す図である。
【図8】仮想カメラとボールとの所定の位置関係の一例について説明するための図である。
【図9】仮想カメラとボールとの所定の位置関係の他の一例について説明するための図である。
【図10】仮想カメラの減速が開始された後のボールと仮想カメラとの位置関係の一例を示す図である。
【図11】ゲーム装置が実行する処理の一例を示すフロー図である。
【図12】仮想カメラとボールとの所定の位置関係の他の一例について説明するための図である。
【発明を実施するための形態】
【0019】
以下、本発明の実施形態の例について図面に基づき詳細に説明する。以下では、画像処理装置の一態様であるゲーム装置に本発明を適用する場合について説明する。本発明の実施形態に係るゲーム装置は、例えば家庭用ゲーム機(据置型ゲーム機)、携帯ゲーム機、携帯電話機、携帯情報端末(PDA)、又はパーソナルコンピュータ等によって実現される。ここでは、本発明の実施形態に係るゲーム装置を家庭用ゲーム機によって実現する場合について説明する。
【0020】
図1は、本発明の実施形態に係るゲーム装置のハードウェア構成を示す。図1に示すゲーム装置10は、家庭用ゲーム機11、表示部32、音声出力部34、及び光ディスク36(情報記憶媒体)を含む。表示部32及び音声出力部34は家庭用ゲーム機11に接続される。例えば家庭用テレビ受像機又は液晶ディスプレイ等が表示部32として用いられ、例えば家庭用テレビ受像機に内蔵されたスピーカ又はヘッドホン等が音声出力部34として用いられる。
【0021】
家庭用ゲーム機11は公知のコンピュータシステムである。家庭用ゲーム機11は、バス12、制御部14、主記憶16、画像処理部18、入出力処理部20、音声処理部22、光ディスクドライブ24、ハードディスク26、通信インタフェース28、及びコントローラ30を含む。
【0022】
制御部14は一又は複数のマイクロプロセッサを含む。制御部14は、光ディスク36から読み出されるプログラムに基づいて、各部の制御処理や情報処理を実行する。主記憶16は例えばRAMを含み、光ディスク36から読み出されたプログラム及びデータが主記憶16に書き込まれる。主記憶16は制御部14の作業用メモリとしても用いられる。バス12はアドレス及びデータを家庭用ゲーム機11の各部でやり取りするためのものである。
【0023】
画像処理部18はVRAMを含み、制御部14から供給される画像データに基づいてVRAM上に画面を描画する。VRAM上に描画された画面はビデオ信号に変換されて表示部32に出力される。
【0024】
入出力処理部20は、制御部14が音声処理部22、光ディスクドライブ24、ハードディスク26、通信インタフェース28、及びコントローラ30にアクセスするためのインタフェースである。音声処理部22はサウンドバッファを含み、光ディスク36からサウンドバッファに読み出された音声データを音声出力部34から出力する。通信インタフェース28は、インターネット等の通信ネットワークに家庭用ゲーム機11を有線又は無線接続するためのインタフェースである。
【0025】
光ディスクドライブ24は、光ディスク36に記録されたプログラムやデータを読み取る。ここでは、プログラムやデータを家庭用ゲーム機11に供給するために光ディスク36を用いるが、メモリカード等、他の情報記憶媒体を用いるようにしてもよい。また、例えば通信ネットワークを介して遠隔地からプログラムやデータを家庭用ゲーム機11に供給するようにしてもよい。ハードディスク26は一般的なハードディスク装置(補助記憶装置)である。なお、光ディスク36に記憶されることとして説明するプログラムやデータはハードディスク26に記憶されていてもよい。また、ハードディスク26の代わりに、ソリッドステートドライブがゲーム装置10に備えられるようにしてもよい。
【0026】
コントローラ30はユーザが操作を行うための操作部である。家庭用ゲーム機11には複数のコントローラ30を有線又は無線接続することが可能になっている。入出力処理部20は一定周期毎(例えば1/60秒ごと)にコントローラ30の各操作部材の操作状態をスキャンし、そのスキャン結果を表す操作信号をバス12を介して制御部14に供給する。制御部14は操作信号に基づいてユーザのゲーム操作を判定する。
【0027】
ゲーム装置10では各種ゲームが実行される。例えば、仮想空間内をオブジェクトが移動するゲームが実行される。
【0028】
以下では、移動物体(例えばボール又はパック等)を用いて行われるスポーツ競技を模したゲームが実行される場合について説明する。具体的には、サッカーゲームが実行される場合の例について説明する。このサッカーゲームでは、ユーザが操作するユーザチーム(ユーザキャラクタグループ)と敵チーム(敵キャラクタグループ)との間のサッカーの試合が行われる。なお、敵チームを操作するのはコンピュータであってもよいし、他のユーザであってもよい。ただし、以下では、敵チームがコンピュータによって操作される場合について説明する。
【0029】
サッカーゲームが実行される場合、仮想空間が主記憶16に構築される。図2は仮想空間の一例を示す。図2に示す仮想空間40は、互いに直交する3つの座標軸(Xw軸、Yw軸、及びZw軸)が設定された仮想的な3次元空間である。仮想空間40に配置されるオブジェクトの位置等はこれらの3つの座標軸によって示される。
【0030】
図2に示すように、仮想空間40には、サッカーフィールドを表すオブジェクトであるフィールド42が配置される。フィールド42上には2本のゴールライン43Aと2本のタッチライン43Bとが表されている。2本のゴールライン43Aと2本のタッチライン43Bとに囲まれた領域であるピッチ45内でサッカーの試合が行われる。
【0031】
また、フィールド42上には、サッカーのゴールを表すオブジェクトであるゴール44と、サッカーボールを表すオブジェクトであるボール46(移動物体オブジェクト)と、ユーザチームに所属するサッカー選手を表すオブジェクトである選手キャラクタ48と、敵チームに所属するサッカー選手を表すオブジェクトである選手キャラクタ50と、が配置される。図2では省略されているが、フィールド42上には、ユーザチームに所属する11人の選手キャラクタ48と、敵チームに所属する11人の選手キャラクタ50と、が配置される。
【0032】
ゴール44の一方はユーザチームに関連づけられ、他方は敵チームに関連づけられる。いずれか一方のチームに関連づけられたゴール44内にボール46が移動すると、他方のチームの得点イベントが発生する。
【0033】
選手キャラクタ48(50)とボール46とが近づくと、所定条件の下、その選手キャラクタ48(50)とボール46とが関連づけられる。この場合、選手キャラクタ48(50)の移動動作はドリブル動作になる。以下では、選手キャラクタ48(50)にボール46が関連づけられた状態のことを「選手キャラクタ48(50)がボール46を保持している」というように記載する。
【0034】
また、仮想空間40には仮想カメラ52(視点)が設定される。この仮想カメラ52から見た仮想空間40を表すゲーム画面が表示部32に表示される。例えば、ボール46が常にゲーム画面に表示されるように、仮想カメラ52はボール46の移動に基づいて移動する。
【0035】
図3はゲーム画面の一例を示す。図3に示すゲーム画面には4人の選手キャラクタ48A,48B,50A,50Bが表示されている。そのうち、2人の選手キャラクタ48A,48Bはユーザチームに所属する選手キャラクタ48であり、残りの2人の選手キャラクタ50A,50Bは敵チームに所属する選手キャラクタ50である。
【0036】
このサッカーゲームでは、ユーザチームに所属する選手キャラクタ48のうちのいずれかがユーザの操作対象に設定される。図3に示すゲーム画面では選手キャラクタ48Aの頭上にカーソル54が表示されている。カーソル54は、ユーザの操作対象になっている選手キャラクタ48を案内する役割を果たす。なお、ユーザの操作対象はユーザチームに所属する選手キャラクタ48のうちで切り替えられる。
【0037】
ユーザの操作対象になっている選手キャラクタ48はユーザの操作に基づいて行動する。例えば、ユーザの操作対象になっている選手キャラクタ48は、ユーザによって行われた方向指示操作によって指示された方向に移動する。ユーザチームに所属する選手キャラクタ48のうちの、ユーザの操作対象になっていない選手キャラクタ48はAI(人工知能)に従って行動する。また、敵チームに所属する選手キャラクタ50もAIに従って行動する。
【0038】
以下、上記のサッカーゲームにおいて、ボール46(移動物体オブジェクト)の移動に応じて仮想カメラ52を好適に移動させるための技術について説明する。ここでは、特に、選手キャラクタ48(50)がショートパス、ロングパス、又はシュートを行ったことによってボール46が蹴り出された場合に仮想カメラ52をボール46の移動に応じて好適に移動させるための技術について説明する。
【0039】
図4は、ゲーム装置10で実現される機能のうち、本発明に関連する機能ブロックを示す機能ブロック図である。図4に示すように、ゲーム装置10は、データ記憶部60、移動物体オブジェクト制御部62、仮想カメラ制御部64、及び画像生成部79を含む。データ記憶部60は例えば主記憶16及び光ディスク36によって実現され、その他の機能ブロックは制御部14が光ディスク36から読み出されたプログラムを実行することによって実現される。
【0040】
まず、データ記憶部60について説明する。データ記憶部60は、仮想空間40に配置される各オブジェクトに関するデータを記憶する。例えば、各オブジェクトのモデルデータがデータ記憶部60に記憶される。また例えば、位置及び姿勢等が変化する動的オブジェクトの状態データ(位置、移動方向や、速度等)がデータ記憶部60に記憶される。なお、本実施形態の場合、ボール46や選手キャラクタ48,50が「動的オブジェクト」に相当している。さらに例えば、仮想カメラ52の状態データ(位置、視線方向、及び画角等)もデータ記憶部60に記憶される。
【0041】
なお、以上の他、例えば、選手キャラクタ48,50のモーションデータ、選手キャラクタ48,50のパラメータデータ、両チームの得点状況を示す得点データや、試合の経過時間を示す経過時間データがデータ記憶部60に記憶される。
【0042】
移動物体オブジェクト制御部62について説明する。移動物体オブジェクト制御部62は移動物体オブジェクトを仮想空間40内で移動させる。例えば、移動物体オブジェクトを移動させるための動作をキャラクタオブジェクトが行った場合に、移動物体オブジェクト制御部62は移動物体オブジェクトを仮想空間40内で移動させる。
【0043】
本実施形態の場合、ボール46が「移動物体オブジェクト」に相当している。例えば、ボール46を移動させるための動作を選手キャラクタ48(50)が行った場合に、移動物体オブジェクト制御部62はボール46を仮想空間40内で移動させる。「ボール46を移動させるための動作」とは、ショートパス、ロングパス、シュート、又はクリア等である。なお、「クリア」とは、自チームのゴール44付近にボール46がある場合に失点を避けるべくボール46を大きく蹴り出すことによってボール46を自チームのゴール44から遠ざける動作である。
【0044】
仮想カメラ制御部64について説明する。仮想カメラ制御部64は移動物体オブジェクトの移動に基づいて仮想カメラを移動させる。仮想カメラ制御部64は、移動方向決定部66、待機部68、加速部72、及び減速部76を含んでいる。以下、これらの機能ブロックについて説明する。
【0045】
移動方向決定部66について説明する。移動物体オブジェクトが移動を開始したり、移動物体オブジェクトの移動方向が変化したりする場合、移動方向決定部66は、移動物体オブジェクトの移動方向に対応する方向を仮想カメラ52の移動方向として決定する。
【0046】
「移動物体オブジェクトの移動方向に対応する方向」とは、移動物体オブジェクトの移動方向と所定の相対関係を有する方向である。例えば、「移動物体オブジェクトの移動方向に対応する方向」とは、移動物体オブジェクトの移動方向と平行な方向である。また例えば、仮想カメラ52の移動経路が予め定められている場合、「移動物体オブジェクトの移動方向に対応する方向」とは、移動物体オブジェクトの移動方向を仮想カメラ52の移動経路上に射影することによって得られるような方向である(後述の図5参照)。
【0047】
図5は仮想カメラ52の移動方向の決定方法の一例について説明するための図である。図5はピッチ45を真上から見た様子を表している。本実施形態の場合、図5に示すように、仮想カメラ52はタッチライン43B(言い換えればXw軸方向)と平行に移動するようになっている。つまり、仮想カメラ52の移動経路80はタッチライン43B(言い換えればXw軸方向)と平行になっている。図5に示すように、移動方向決定部66は、ボール46の移動方向82を仮想カメラ52の移動経路80上に射影することによって得られる方向84を、仮想カメラ52の移動方向として決定する。
【0048】
待機部68について説明する。待機部68は、移動物体オブジェクトの移動が開始されてから待機時間が経過するまで、移動方向決定部66によって決定された移動方向への仮想カメラ52の移動(すなわち、移動物体オブジェクトの該移動に応じた仮想カメラ52の移動)を待機させる。
【0049】
待機部68は待機時間設定部70を含んでいる。移動物体オブジェクトを移動させるための動作をキャラクタオブジェクトが行った結果として移動物体オブジェクトが移動するような場合に、待機時間設定部70は、キャラクタオブジェクトによって行われた、移動物体オブジェクトを移動させるための動作の種類に基づいて、待機時間を設定する。
【0050】
本実施形態における待機時間設定部70は、ボール46を移動させるための動作を選手キャラクタ48(50)が行った場合に、選手キャラクタ48(50)によって行われた動作の種類に基づいて待機時間を設定する。
【0051】
本実施形態の場合、選手キャラクタ48(50)によって行われた動作の種類に基づいて待機時間を設定するための待機時間データがデータ記憶部60に記憶される。図6は待機時間データの一例を示している。図6に示す待機時間データは、ボール46を移動させるための動作の種類と、待機時間と、の対応関係を示すデータになっている。この待機時間データでは、「ショートパス」又は「ロングパス」が行われた場合の待機時間が定められている。図6において、「T1」及び「T2」は所定の時間を示しており、「T2」は「T1」よりも長い時間を示している。図6に示す待機時間データでは、「ショートパス」よりもボール46を遠くに移動させるための「ロングパス」の待機時間(T2)が、「ショートパス」の待機時間(T1)よりも長くなっている。すなわち、図6に示す待機時間データでは、ボール46が大きく移動する可能性がある動作を選手キャラクタ48(50)が行う場合には待機時間が長くなるように設定されている。
【0052】
待機時間設定部70は、ボール46を移動させるための動作を選手キャラクタ48(50)が行った場合に、選手キャラクタ48(50)によって行われた動作の種類と、上記の待機時間データと、に基づいて待機時間を設定する。すなわち、待機時間設定部70は上記の待機時間データを参照し、選手キャラクタ48(50)によって行われた動作の種類に対応づけられた待機時間を取得する。そして、待機部68は、ボール46の移動が開始されてから(言い換えれば、ボール46を移動させるための動作を選手キャラクタ48(50)が行ってから)、取得された待機時間が経過するまで、移動方向決定部66によって決定された移動方向への仮想カメラ52の移動を待機させる。
【0053】
加速部72について説明する。移動物体オブジェクトの移動が開始されてから待機時間が経過した場合、加速部72は、移動方向決定部66によって決定された移動方向に仮想カメラ52を移動開始させる。加速部72は、仮想カメラ52の速度が第1上限速度を超えないようにしつつ、移動方向決定部66によって決定された移動方向に仮想カメラ52を加速させる。
【0054】
加速部72は加速時上限速度設定部74を含んでいる。加速時上限速度設定部74は移動物体オブジェクトの速度に基づいて第1上限速度を設定する。例えば、加速時上限速度設定部74は、1よりも大きく、かつ、2以下のである係数を移動物体オブジェクトの速度に乗じることによって得られる速度に基づいて、第1上限速度を設定する。
【0055】
以下、加速部72及び加速時上限速度設定部74の具体的な動作例について詳しく説明する。図7はボール46の移動が開始されてから待機時間が経過した場合のボール46と仮想カメラ52との位置関係の一例を示している。本実施形態では、ボール46の移動が開始されてから待機時間が経過した場合、加速部72は、移動方向決定部66によって決定された移動方向(方向84)に仮想カメラ52を移動開始させる。
【0056】
例えば、加速部72は仮想カメラ52の速度(VC)を下記の式(1)に従って設定する。なお、下記の式(1)において、「VCo」は仮想カメラ52の初速度を示している。また、「A1」は一定の加速度を示しており、「T」は仮想カメラ52の移動が開始されてからの経過時間を示している。
VC=VCo+A1*T ・・・ (1)
【0057】
仮想カメラ52の初速度(VCo)及び加速度(A1)としては、仮想カメラ52がボール46に追いつき、かつ、追い越すことができるような初速度及び加速度が設定される。なお、「仮想カメラ52がボール46に追いつく」とは、例えば、移動方向決定部66によって決定された移動方向に仮想カメラ52が移動する場合の仮想カメラ52の移動経路80上にボール46の現在の位置を射影してなる射影位置に仮想カメラ52の位置が一致することを意味する。詳細については後述する(図8参照)。また、「仮想カメラ52がボール46を追い越す」とは、例えば、仮想カメラ52の位置が上記の射影位置よりも仮想カメラ52の進行方向側にあることを意味する。
【0058】
また、加速時上限速度設定部74は、仮想カメラ52が加速される場合の上限速度である第1上限速度(V1max)を下記の式(2)に従って設定する。なお、下記の式(2)において、「K」は1よりも大きく、かつ2以下である係数を示している。例えば、「K」は「2」に設定される。また、「VB」はボール46の現在速度を示している。より詳しくは、「VB」は、ボール46の現在速度のXw軸方向成分(すなわち、仮想カメラ52の移動方向)を示している。
V1max=K*VB ・・・ (2)
【0059】
上記の式(1)によって算出された速度(VC)が、上記の式(2)によって算出された第1上限速度(V1max)を超える場合、加速部72は仮想カメラ52の速度を第1上限速度(V1max)に設定する。
【0060】
減速部76について説明する。加速部72によって仮想カメラ52が制御されている場合において、仮想カメラ52と移動物体オブジェクトとの位置関係が所定の位置関係になった場合に、加速部72による仮想カメラ52の制御が中止される。この場合、減速部76は、仮想カメラ52を、仮想カメラ52の速度が第2上限速度を下回るようにしつつ減速させる。
【0061】
減速部76は減速時上限速度設定部78を含んでいる。減速時上限速度設定部78は、仮想カメラ52の速度が最も速かった時の仮想カメラ52の速度と、移動物体オブジェクトの現在の速度と、に基づいて、第2上限速度を設定する。具体的には、減速時上限速度設定部78は、仮想カメラ52の速度が最も速かった時の仮想カメラ52の速度と、移動物体オブジェクトの現在の速度と、の間の速度を第2上限速度として設定する。例えば、減速時上限速度設定部78は、仮想カメラ52の速度が最も速かった時の仮想カメラ52の速度と、移動物体オブジェクトの現在の速度と、の中間値に基づいて、第2上限速度を設定する。より具体的には、減速時上限速度設定部78は、仮想カメラ52の速度が最も速かった時の仮想カメラ52の速度と、移動物体オブジェクトの現在の速度と、の中間値を第2上限速度として設定する。
【0062】
以下、減速部76及び減速時上限速度設定部78の具体的な動作例について詳しく説明する。
【0063】
加速部72によって仮想カメラ52が制御されている場合、ゲーム装置10は仮想カメラ52とボール46との位置関係が所定の位置関係になったか否かを判定する。「所定の位置関係」とは、例えば、仮想カメラ52がボール46に追いついたとみなすことができるような仮想カメラ52とボール46との位置関係である。
【0064】
図8は「所定の位置関係」の一例を説明するための図である。図8において、符号46Aは、移動方向決定部66によって決定された移動方向に仮想カメラ52が移動する場合の仮想カメラ52の移動経路80上にボール46の現在位置を射影してなる位置を示している。ゲーム装置10は、この射影位置46Aと仮想カメラ52の現在位置とが一致したか否かを判定する。射影位置46Aと仮想カメラ52の現在位置とが一致した場合、ゲーム装置10は仮想カメラ52とボール46との位置関係が所定の位置関係になったと判定する。
【0065】
図9は「所定の位置関係」の他の一例を説明するための図である。ゲーム装置10は、上記の射影位置46Aと仮想カメラ52の現在位置との間の距離(L)が基準値以下になったか否かを判定するようにしてもよい。上記の距離(L)が基準値以下になった場合、ゲーム装置10は仮想カメラ52がボール46に追いついたとみなすようにしてもよい。すなわち、上記の距離(L)が基準値以下になった場合、ゲーム装置10は仮想カメラ52とボール46との位置関係が所定の位置関係になったと判定するようにしてもよい。なお、上記の基準値を零に設定すると、ゲーム装置10は仮想カメラ52とボール46との位置関係が図8に示す位置関係になったか否かを判定することになる。
【0066】
仮想カメラ52とボール46との位置関係が所定の位置関係になった場合、減速部76は仮想カメラ52の減速を開始させる。例えば、減速部76は仮想カメラ52の速度(VC)を下記の式(3)に従って設定する。なお、下記の式(3)において、「VCmax」は、仮想カメラ52の減速が開始される直前の仮想カメラ52の速度(すなわち、仮想カメラ52の速度が最も速くなった時の仮想カメラ52の速度、さらに言い換えれば、仮想カメラ52とボール46との位置関係が所定の位置関係になった場合の仮想カメラ52の速度)を示している。また、「A2」は一定の減速度を示しており、「T」は仮想カメラ52の減速が開始されてからの経過時間を示している。
VC=VCmax−A2*T ・・・ (3)
【0067】
また、減速時上限速度設定部78は、仮想カメラ52が減速される場合の上限速度である第2上限速度(V2max)を下記の式(4)に従って設定する。なお、下記の式(4)において、「VB」はボール46の現在速度を示している。
V2max=(VCmax+VB)/2 ・・・ (4)
【0068】
上記の式(3)によって算出された速度(VC)が、上記の式(4)によって算出された第2上限速度(V2max)を超える場合、減速部76は仮想カメラ52の速度を第2上限速度(V2max)に設定する。
【0069】
仮想カメラ52とボール46との位置関係が所定の位置関係になった時点(例えば、仮想カメラ52がボール46に追いついた時点)で仮想カメラ52の速度はボール46の速度よりも速いため、例えば図10に示すように、仮想カメラ52はボール46を追い越すことになる。そして、仮想カメラ52の速度がボール46の速度以下に減速されるまでの間、仮想カメラ52とボール46との間の距離は徐々に大きくなる。しかし、仮想カメラ52の速度がボール46の速度未満まで減速されると、仮想カメラ52とボール46との間の距離は徐々に小さくなる。そして、仮想カメラ52とボール46との間の位置関係が所定の位置関係になった場合、仮想カメラ52の減速は終了される。ここで、「所定の位置関係」とは、例えば、上記の射影位置46Aと仮想カメラ52の現在位置との間の距離(L)が基準値以下であるような位置関係である。仮想カメラ52の減速が終了された場合、仮想カメラ52の制御方法は通常の制御方法となる。
【0070】
画像生成部79について説明する。画像生成部79は、仮想空間40内を移動する移動物体オブジェクトを仮想カメラ52から見た様子を表す画像を生成する。すなわち、本実施形態の場合、画像生成部79は、仮想空間40内を移動するボール46を仮想カメラ52から見た様子を表す画像を生成する。
【0071】
次に、ゲーム装置10で実行される処理について説明する。ここでは、選手キャラクタ48(50)によってパスが行われた場合に実行される仮想カメラ52の制御処理について説明する。図11は、選手キャラクタ48(50)によってパスが行われた場合に実行される仮想カメラ52の制御処理の一例を示すフロー図である。制御部14が光ディスク36から読み出されたプログラムに従って図11に示す処理を実行することによって、制御部14が仮想カメラ制御部64として機能するようになる。なお、図11に示す処理と並行して、ボール46や各選手キャラクタ48,50の状態を更新したり、表示部32に表示される画面を更新したりするための処理が所定時間(例えば1/60秒)ごとに実行されることになる。
【0072】
図11に示すように、選手キャラクタ48(50)によってパスが行われた場合、まず、制御部14(移動方向決定部66)は仮想カメラ52の移動方向を決定する(S101)。例えば図5において説明したように、制御部14は、ボール46の移動方向82(すなわち、パス方向)を示すベクトルを仮想カメラ52の移動経路80上に射影することによって得られるベクトルが示す方向84を、仮想カメラ52の移動方向として決定する。
【0073】
なお、ここでは、仮想カメラ52が予め定められた移動経路80上を移動することとしたが、仮想カメラ52の移動経路は予め定められていなくてもよい。例えば、仮想カメラ52はボール46の移動方向と平行に移動するようにしてもよい。その場合、制御部14は、ボール46の移動方向を示すベクトルと平行なベクトルが示す方向を仮想カメラ52の移動方向として決定する。
【0074】
ステップS101の処理が実行された後、制御部14(待機時間設定部70)は、仮想カメラ52の移動を開始するまでの待機時間を決定する(S102)。例えば、制御部14は待機時間データ(図6)を参照し、選手キャラクタ48(50)によって行われたパスの種類に対応づけられた待機時間を取得する。なお、ステップS101及びステップS102の処理はどちらが先に実行されてもよい。
【0075】
ステップS102の処理が実行された後、制御部14(待機部68)は、ボール46の移動が開始されてから(言い換えれば、選手キャラクタ48(50)によってパスが行われてから)待機時間が経過したか否かを判定する(S103)。ここで用いられる「待機時間」はステップS102で決定された待機時間である。
【0076】
待機時間が経過していないと判定された場合、制御部14(待機部68)は、後述のステップS104の処理を実行せずに、待機時間が経過したか否かの監視を続行する(S103)。一方、待機時間が経過したと判定された場合、制御部14(加速部72)は仮想カメラ52の移動を開始させる(S104)。すなわち、制御部14は、ステップS101で決定された移動方向に仮想カメラ52を加速させる。
【0077】
この場合、仮想カメラ52の加速は、後述のステップS105において仮想カメラ52がボール46に追いついたと判定されるまでの間にわたって継続される。なお、この間、制御部14は上記の式(1)に従って仮想カメラ52の速度を設定し、該速度に基づいて仮想カメラ52の位置を更新していく。また、この間、制御部14(加速時上限速度設定部74)は上記の式(2)に従って仮想カメラ52の上限速度(第1上限速度)を設定する。そして、制御部14は上記の式(1)に従って算出される速度がこの上限速度を超えるか否かを判定する。上記の式(1)に従って算出される速度がこの上限速度を超える場合、制御部14は仮想カメラ52の速度をこの上限速度に設定する。
【0078】
仮想カメラ52の移動が開始された後(すなわち、仮想カメラ52の加速が開始された後)、制御部14は仮想カメラ52がボール46に追いついたか否かを判定する(S105)。
【0079】
例えば図8に示したように、制御部14は、ボール46の現在位置を仮想カメラ52の移動経路80上に射影してなる射影位置46Aと、仮想カメラ52の現在位置と、が一致しているか否かを判定する。そして、射影位置46Aと仮想カメラ52の現在位置とが一致している場合に、制御部14は仮想カメラ52がボール46に追いついたと判定する。
【0080】
または、例えば図9に示したように、制御部14は、ボール46の現在位置を仮想カメラ52の移動経路80上に射影してなる射影位置46Aと、仮想カメラ52の現在位置と、の間の距離(L)が基準値以下であるか否かを判定するようにしてもよい。そして、該距離(L)が基準値以下である場合に、制御部14は仮想カメラ52がボール46に追いついたと判定するようにしてもよい。
【0081】
ステップS105において仮想カメラ52がボール46に追いついたと判定されなかった場合、制御部14は、仮想カメラ52がボール46に追いついたか否かの監視を続行する(S105)。なお、この場合、仮想カメラ52の加速も続行される。
【0082】
一方、ステップS105において仮想カメラ52がボール46に追いついたと判定された場合、制御部14は仮想カメラ52の加速を中止させる。そして、制御部14(減速部76)は仮想カメラ52を減速させる(S106)。この場合、制御部14は上記の式(3)に従って仮想カメラ52の速度を設定し、該速度に基づいて仮想カメラ52の位置を更新していく。また、この間、制御部14(減速時上限速度設定部78)は上記の式(4)に従って仮想カメラ52の上限速度(第2上限速度)を設定し、制御部14は上記の式(3)に従って算出される速度がこの上限速度を超えるか否かを判定する。上記の式(3)に従って算出される速度がこの上限速度を超える場合、制御部14は仮想カメラ52の速度をこの上限速度に設定する。
【0083】
仮想カメラ52の減速は、仮想カメラ52とボール46との位置関係が所定の位置関係になるまで継続される。例えば、仮想カメラ52とボール46との間の距離が基準値以下になった場合に、仮想カメラ52の減速は終了される。より詳しくは、上記の射影位置46Aと仮想カメラ52の現在位置との間の距離(L)が基準値以下になった場合に仮想カメラ52の減速が終了される。この場合、仮想カメラ52の制御方法が通常の制御方法に戻る。以上で図11に示す処理の説明を終了する。
【0084】
以上説明したゲーム装置10では、選手キャラクタ48(50)によってパスやシュートが行われた場合、ボール46の移動の開始に遅れて、仮想カメラ52の移動を開始させるようになっている。すなわち、ボール46の移動が開始された場合、待機時間(例えば数フレーム)が経過した後に仮想カメラ52の加速が開始され、仮想カメラ52がボール46に追いつくようになっている。
【0085】
特にゲーム装置10では、単に、仮想カメラ52の移動をボール46の移動の開始に遅れて開始させるだけでなく、仮想カメラ52の移動制御をさらに向上させるための構成が実現されている。
【0086】
すなわち、ゲーム装置10では、選手キャラクタ48(50)が行った動作の種類に応じて、上記の待機時間が設定されるようになっている。具体的には、ボール46が大きく移動する可能性がある動作を選手キャラクタ48(50)が行う場合には待機時間が長くなるようになっている(図6参照)。このため、例えば、選手キャラクタ48(50)がロングパスを行った場合には、待機時間が長く設定されることによって、仮想カメラ52が加速し始める際のボール46と仮想カメラ52との間の距離が大きくなることから、ボール46が大きく移動することがゲーム画面において強調されるようになる。その結果として、ボール46が大きく移動することがユーザから見て分かりやすくなっている。
【0087】
また、ゲーム装置10では、仮想カメラ52が加速される場合の上限速度がボール46の速度に基づいて設定されるようになっており、その結果として、仮想カメラ52がボール46に追いつくまでの間(言い換えれば、仮想カメラ52が加速される間)の仮想カメラ52の動きが不自然にならないように担保されるようになっている。例えば、ボール46の速度に比べて仮想カメラ52が速くなりすぎてしまうと、仮想カメラ52の動きが不自然であるとユーザが感じてしまう場合があるが、ゲーム装置10によれば、仮想カメラ52の上限速度がボール46の速度に基づいて設定されることによって、上記のような不都合が生じないように図ることが可能になる。
【0088】
さらに、ゲーム装置10では、仮想カメラ52がボール46に追いついた場合に仮想カメラ52が減速される。特にゲーム装置10では、仮想カメラ52が減速される場合の上限速度が仮想カメラ52が最も速かった際の速度とボール46の現在の速度とに基づいて設定されるようになっており、その結果として、仮想カメラ52が減速される間の仮想カメラ52の動きが不自然にならないように担保されるようになっている。
【0089】
なお、本発明は以上に説明した実施の形態に限定されるものではない。
【0090】
例えば、以上に説明した実施形態では、仮想カメラ52がボール46に追いついた場合に仮想カメラ52の減速が開始されるようになっていた(図8,9参照)。しかしながら、仮想カメラ52がボール46を追い越した場合に仮想カメラ52の減速が開始されるようにしてもよい。すなわち、図11のステップS105において、制御部14は仮想カメラ52がボール46を追い越したか否かを判定するようにしてもよい。
【0091】
制御部14は、仮想カメラ52とボール46との位置関係が、仮想カメラ52がボール46を追い越したとみなすことができるような所定の位置関係となったか否かを判定することによって、仮想カメラ52がボール46を追い越したか否かを判定する。図12はこの場合の「所定の位置関係」の一例を説明するための図である。例えば、ゲーム装置10は、仮想カメラ52の現在位置が上記の射影位置46Aよりも仮想カメラ52の進行方向側にあり、かつ、上記の射影位置46Aと仮想カメラ52の現在位置との間の距離(L)が基準値以上であるか否かを判定する。そして、仮想カメラ52の現在位置が上記の射影位置46Aよりも仮想カメラ52の進行方向側にあり、かつ、上記の射影位置46Aと仮想カメラ52の現在位置との間の距離(L)が基準値以上である場合、ゲーム装置10は仮想カメラ52がボール46を追い越したと判定する。
【0092】
なお、上記の基準値は零に設定するようにしてもよい。この場合、ゲーム装置10は、仮想カメラ52の現在位置が上記の射影位置46Aよりも仮想カメラ52の進行方向側にあるか否かを判定することになる。
【0093】
また例えば、本発明はサッカーゲーム以外のスポーツゲームにも適用することができる。本発明は、移動物体(例えばボール又はパック等)を用いて行われるスポーツ競技を模したゲーム(例えばバスケットボールゲーム、アイスホッケーゲーム、又は野球ゲーム等)に適用することができる。また、本発明は上記のスポーツゲーム以外のゲームにも適用することができる。本発明は、仮想空間内を移動するオブジェクトを仮想カメラから見た様子を表すゲーム画面が表示されるゲームに適用することができる。また、本発明はゲーム装置以外の画像処理装置にも適用することができる。本発明は、仮想空間内を移動するオブジェクトを仮想カメラから見た様子を表す画像を生成する画像処理装置に適用することができる。
【符号の説明】
【0094】
10 ゲーム装置、11 家庭用ゲーム機、12 バス、14 制御部、16 主記憶、18 画像処理部、20 入出力処理部、22 音声処理部、24 光ディスクドライブ、26 ハードディスク、28 通信インタフェース、30 コントローラ、32 表示部、34 音声出力部、36 光ディスク、40 ゲーム空間、42 フィールド、43A ゴールライン、43B タッチライン、44 ゴール、45 ピッチ、46 ボール、48,48A,48B,50,50A,50B 選手キャラクタ、52 仮想カメラ、54 カーソル、60 データ記憶部、62 移動物体オブジェクト制御部、64 仮想カメラ制御部、66 移動方向決定部、68 待機部、70 待機時間設定部、72 加速部、74 加速時上限速度設定部、76 減速部、78 減速時上限速度設定部、79 画像生成部、80 仮想カメラの移動経路、82 ボールの移動方向、84 仮想カメラの移動方向。
【特許請求の範囲】
【請求項1】
仮想空間内を移動するオブジェクトを仮想カメラから見た様子を表す画像を生成する画像処理装置において、
前記オブジェクトを移動させるオブジェクト制御手段と、
前記オブジェクトの移動に基づいて、前記仮想カメラを移動させる仮想カメラ制御手段と、
前記仮想空間を前記仮想カメラから見た様子を表す画像を生成する画像生成手段と、
を含み、
前記仮想カメラ制御手段は、
前記オブジェクトの移動方向に対応する方向を前記仮想カメラの移動方向として決定する移動方向決定手段と、
前記オブジェクトの移動が開始されてから待機時間が経過するまで、前記移動方向決定手段によって決定された移動方向への前記仮想カメラの移動を待機させる待機手段と、
前記待機時間が経過した場合、前記移動方向決定手段によって決定された移動方向に前記仮想カメラを加速させる加速手段と、を含み、
前記オブジェクトは、前記オブジェクトを移動させるための動作をキャラクタオブジェクトが行った結果として、前記仮想空間内を移動し、
前記待機手段は、前記キャラクタオブジェクトによって行われた、前記オブジェクトを移動させるための前記動作の種類に基づいて、前記待機時間を設定する待機時間設定手段を含む、
ことを特徴とする画像処理装置。
【請求項2】
請求項1に記載の画像処理装置において、
前記加速手段は、前記加速手段によって前記仮想カメラが加速される場合における上限速度を、前記オブジェクトの速度に基づいて設定する加速時上限速度設定手段を含み、前記仮想カメラの速度が該上限速度を超えないようにしつつ、前記仮想カメラを加速させることを特徴とする画像処理装置。
【請求項3】
請求項2に記載の画像処理装置において、
前記加速時上限速度設定手段は、1よりも大きく、かつ、2以下である係数を前記オブジェクトの速度に乗じることによって得られる速度に基づいて、前記加速手段によって前記カメラが加速される場合における上限速度を設定することを特徴とする画像処理装置。
【請求項4】
請求項1乃至3のいずれかに記載の画像処理装置において、
前記仮想カメラ制御手段は、
前記加速手段によって前記仮想カメラが加速されている場合において、前記仮想カメラと前記オブジェクトとの位置関係が所定の位置関係になった場合、前記仮想カメラを減速させる減速手段を含み、
前記減速手段は、前記減速手段によって前記カメラが減速される場合における上限速度を、前記仮想カメラの速度が最も速かった時の前記仮想カメラの速度と、前記オブジェクトの速度と、に基づいて設定する減速時上限速度設定手段を含み、前記仮想カメラの速度が該上限速度を下回るようにしつつ、前記仮想カメラを減速させる、
ことを特徴とする画像処理装置。
【請求項5】
請求項4に記載の画像処理装置において、
前記減速時上限速度設定手段は、前記仮想カメラの速度が最も速かった時の前記仮想カメラの前記速度と、前記オブジェクトの現在の速度と、の中間値に基づいて、前記減速手段によって前記カメラが減速される場合における上限速度を設定することを特徴とする画像処理装置。
【請求項6】
請求項4又は5に記載の画像処理装置において、
前記所定の位置関係は、前記移動方向決定手段によって決定された移動方向に前記仮想カメラが移動する場合の前記仮想カメラの移動経路上に前記オブジェクトの位置を射影してなる射影位置と、前記仮想カメラの位置と、の間の距離に関する距離情報が基準値以内であるような位置関係であることを特徴とする画像処理装置。
【請求項7】
請求項4又は5に記載の画像処理装置において、
前記所定の位置関係は、前記移動方向決定手段によって決定された移動方向に前記仮想カメラが移動する場合の前記仮想カメラの移動経路上に前記オブジェクトの位置を射影してなる射影位置よりも前記仮想カメラの位置が前記仮想カメラの進行方向側にあり、かつ、前記仮想カメラと前記移動物体オブジェクトとの間の距離に関する距離情報が基準値以上であるような位置関係であることを特徴とする画像処理装置。
【請求項8】
仮想空間内を移動するオブジェクトを仮想カメラから見た様子を表す画像を生成する画像処理装置の制御方法において、
前記オブジェクトを移動させるオブジェクト制御ステップと、
前記オブジェクトの移動に基づいて、前記仮想カメラを移動させる仮想カメラ制御ステップと、
前記仮想空間を前記仮想カメラから見た様子を表す画像を生成する画像生成ステップと、
を含み、
前記仮想カメラ制御ステップは、
前記オブジェクトの移動方向に対応する方向を前記仮想カメラの移動方向として決定する移動方向決定ステップと、
前記オブジェクトの移動が開始されてから待機時間が経過するまで、前記移動方向決定ステップにおいて決定された移動方向への前記仮想カメラの移動を待機させる待機ステップと、
前記待機時間が経過した場合、前記移動方向決定ステップにおいて決定された移動方向に前記仮想カメラを加速させる加速ステップと、を含み、
前記オブジェクトは、前記オブジェクトを移動させるための動作をキャラクタオブジェクトが行った結果として、前記仮想空間内を移動し、
前記待機ステップは、前記キャラクタオブジェクトによって行われた、前記オブジェクトを移動させるための前記動作の種類に基づいて、前記待機時間を設定する待機時間設定ステップを含む、
ことを特徴とする画像処理装置の制御方法。
【請求項9】
仮想空間内を移動するオブジェクトを仮想カメラから見た様子を表す画像を生成する画像処理装置としてコンピュータを機能させるためのプログラムであって、
前記オブジェクトを移動させるオブジェクト制御手段、
前記オブジェクトの移動に基づいて、前記仮想カメラを移動させる仮想カメラ制御手段、及び、
前記仮想空間を前記仮想カメラから見た様子を表す画像を生成する画像生成手段、
として前記コンピュータを機能させ、
前記仮想カメラ制御手段は、
前記オブジェクトの移動方向に対応する方向を前記仮想カメラの移動方向として決定する移動方向決定手段と、
前記オブジェクトの移動が開始されてから待機時間が経過するまで、前記移動方向決定手段によって決定された移動方向への前記仮想カメラの移動を待機させる待機手段と、
前記待機時間が経過した場合、前記移動方向決定手段によって決定された移動方向に前記仮想カメラを加速させる加速手段と、を含み、
前記オブジェクトは、前記オブジェクトを移動させるための動作をキャラクタオブジェクトが行った結果として、前記仮想空間内を移動し、
前記待機手段は、前記キャラクタオブジェクトによって行われた、前記オブジェクトを移動させるための前記動作の種類に基づいて、前記待機時間を設定する待機時間設定手段を含む、
ことを特徴とするプログラム。
【請求項1】
仮想空間内を移動するオブジェクトを仮想カメラから見た様子を表す画像を生成する画像処理装置において、
前記オブジェクトを移動させるオブジェクト制御手段と、
前記オブジェクトの移動に基づいて、前記仮想カメラを移動させる仮想カメラ制御手段と、
前記仮想空間を前記仮想カメラから見た様子を表す画像を生成する画像生成手段と、
を含み、
前記仮想カメラ制御手段は、
前記オブジェクトの移動方向に対応する方向を前記仮想カメラの移動方向として決定する移動方向決定手段と、
前記オブジェクトの移動が開始されてから待機時間が経過するまで、前記移動方向決定手段によって決定された移動方向への前記仮想カメラの移動を待機させる待機手段と、
前記待機時間が経過した場合、前記移動方向決定手段によって決定された移動方向に前記仮想カメラを加速させる加速手段と、を含み、
前記オブジェクトは、前記オブジェクトを移動させるための動作をキャラクタオブジェクトが行った結果として、前記仮想空間内を移動し、
前記待機手段は、前記キャラクタオブジェクトによって行われた、前記オブジェクトを移動させるための前記動作の種類に基づいて、前記待機時間を設定する待機時間設定手段を含む、
ことを特徴とする画像処理装置。
【請求項2】
請求項1に記載の画像処理装置において、
前記加速手段は、前記加速手段によって前記仮想カメラが加速される場合における上限速度を、前記オブジェクトの速度に基づいて設定する加速時上限速度設定手段を含み、前記仮想カメラの速度が該上限速度を超えないようにしつつ、前記仮想カメラを加速させることを特徴とする画像処理装置。
【請求項3】
請求項2に記載の画像処理装置において、
前記加速時上限速度設定手段は、1よりも大きく、かつ、2以下である係数を前記オブジェクトの速度に乗じることによって得られる速度に基づいて、前記加速手段によって前記カメラが加速される場合における上限速度を設定することを特徴とする画像処理装置。
【請求項4】
請求項1乃至3のいずれかに記載の画像処理装置において、
前記仮想カメラ制御手段は、
前記加速手段によって前記仮想カメラが加速されている場合において、前記仮想カメラと前記オブジェクトとの位置関係が所定の位置関係になった場合、前記仮想カメラを減速させる減速手段を含み、
前記減速手段は、前記減速手段によって前記カメラが減速される場合における上限速度を、前記仮想カメラの速度が最も速かった時の前記仮想カメラの速度と、前記オブジェクトの速度と、に基づいて設定する減速時上限速度設定手段を含み、前記仮想カメラの速度が該上限速度を下回るようにしつつ、前記仮想カメラを減速させる、
ことを特徴とする画像処理装置。
【請求項5】
請求項4に記載の画像処理装置において、
前記減速時上限速度設定手段は、前記仮想カメラの速度が最も速かった時の前記仮想カメラの前記速度と、前記オブジェクトの現在の速度と、の中間値に基づいて、前記減速手段によって前記カメラが減速される場合における上限速度を設定することを特徴とする画像処理装置。
【請求項6】
請求項4又は5に記載の画像処理装置において、
前記所定の位置関係は、前記移動方向決定手段によって決定された移動方向に前記仮想カメラが移動する場合の前記仮想カメラの移動経路上に前記オブジェクトの位置を射影してなる射影位置と、前記仮想カメラの位置と、の間の距離に関する距離情報が基準値以内であるような位置関係であることを特徴とする画像処理装置。
【請求項7】
請求項4又は5に記載の画像処理装置において、
前記所定の位置関係は、前記移動方向決定手段によって決定された移動方向に前記仮想カメラが移動する場合の前記仮想カメラの移動経路上に前記オブジェクトの位置を射影してなる射影位置よりも前記仮想カメラの位置が前記仮想カメラの進行方向側にあり、かつ、前記仮想カメラと前記移動物体オブジェクトとの間の距離に関する距離情報が基準値以上であるような位置関係であることを特徴とする画像処理装置。
【請求項8】
仮想空間内を移動するオブジェクトを仮想カメラから見た様子を表す画像を生成する画像処理装置の制御方法において、
前記オブジェクトを移動させるオブジェクト制御ステップと、
前記オブジェクトの移動に基づいて、前記仮想カメラを移動させる仮想カメラ制御ステップと、
前記仮想空間を前記仮想カメラから見た様子を表す画像を生成する画像生成ステップと、
を含み、
前記仮想カメラ制御ステップは、
前記オブジェクトの移動方向に対応する方向を前記仮想カメラの移動方向として決定する移動方向決定ステップと、
前記オブジェクトの移動が開始されてから待機時間が経過するまで、前記移動方向決定ステップにおいて決定された移動方向への前記仮想カメラの移動を待機させる待機ステップと、
前記待機時間が経過した場合、前記移動方向決定ステップにおいて決定された移動方向に前記仮想カメラを加速させる加速ステップと、を含み、
前記オブジェクトは、前記オブジェクトを移動させるための動作をキャラクタオブジェクトが行った結果として、前記仮想空間内を移動し、
前記待機ステップは、前記キャラクタオブジェクトによって行われた、前記オブジェクトを移動させるための前記動作の種類に基づいて、前記待機時間を設定する待機時間設定ステップを含む、
ことを特徴とする画像処理装置の制御方法。
【請求項9】
仮想空間内を移動するオブジェクトを仮想カメラから見た様子を表す画像を生成する画像処理装置としてコンピュータを機能させるためのプログラムであって、
前記オブジェクトを移動させるオブジェクト制御手段、
前記オブジェクトの移動に基づいて、前記仮想カメラを移動させる仮想カメラ制御手段、及び、
前記仮想空間を前記仮想カメラから見た様子を表す画像を生成する画像生成手段、
として前記コンピュータを機能させ、
前記仮想カメラ制御手段は、
前記オブジェクトの移動方向に対応する方向を前記仮想カメラの移動方向として決定する移動方向決定手段と、
前記オブジェクトの移動が開始されてから待機時間が経過するまで、前記移動方向決定手段によって決定された移動方向への前記仮想カメラの移動を待機させる待機手段と、
前記待機時間が経過した場合、前記移動方向決定手段によって決定された移動方向に前記仮想カメラを加速させる加速手段と、を含み、
前記オブジェクトは、前記オブジェクトを移動させるための動作をキャラクタオブジェクトが行った結果として、前記仮想空間内を移動し、
前記待機手段は、前記キャラクタオブジェクトによって行われた、前記オブジェクトを移動させるための前記動作の種類に基づいて、前記待機時間を設定する待機時間設定手段を含む、
ことを特徴とするプログラム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【公開番号】特開2013−61798(P2013−61798A)
【公開日】平成25年4月4日(2013.4.4)
【国際特許分類】
【出願番号】特願2011−199850(P2011−199850)
【出願日】平成23年9月13日(2011.9.13)
【出願人】(506113602)株式会社コナミデジタルエンタテインメント (1,441)
【Fターム(参考)】
【公開日】平成25年4月4日(2013.4.4)
【国際特許分類】
【出願日】平成23年9月13日(2011.9.13)
【出願人】(506113602)株式会社コナミデジタルエンタテインメント (1,441)
【Fターム(参考)】
[ Back to top ]