
画像処理装置及びその方法、並びに画像処理するためのコンピュータプログラム及びコンピュータプログラムを記録した記録媒体
【課題】 本発明は、オルソ画像の画像処理装置及びその方法に関する。
【解決手段】 地図データ保存部から、画像処理の対象となる領域を選択し、第1の走行に基づいて得られた第1のオルソ画像及び第2の走行に基づいて得られた第2のオルソ画像を、夫々位置情報と関連付けて格納するオルソ画像格納部から、該対象領域内に存在する該画像処理の基準となる基準オルソを抽出し、該位置情報に基づいて該基準オルソを配置し、該対象領域内において、補正の対象となる補正領域を指定し、該オルソ画像格納部から、該補正領域内に存在する、該基準オルソ以外の補正オルソ画像を抽出し、該位置情報に基づいて該補正オルソを配置し、該基準オルソにおける第1のポイントと、該補正オルソにおいて該第1のポイントに対応する第2のポイントとを指定して合わせ込み処理し、当該両ポイントに基づいて該補正オルソの該基準オルソへの移動を示す移動ベクトルを生成し、表示する。
【解決手段】 地図データ保存部から、画像処理の対象となる領域を選択し、第1の走行に基づいて得られた第1のオルソ画像及び第2の走行に基づいて得られた第2のオルソ画像を、夫々位置情報と関連付けて格納するオルソ画像格納部から、該対象領域内に存在する該画像処理の基準となる基準オルソを抽出し、該位置情報に基づいて該基準オルソを配置し、該対象領域内において、補正の対象となる補正領域を指定し、該オルソ画像格納部から、該補正領域内に存在する、該基準オルソ以外の補正オルソ画像を抽出し、該位置情報に基づいて該補正オルソを配置し、該基準オルソにおける第1のポイントと、該補正オルソにおいて該第1のポイントに対応する第2のポイントとを指定して合わせ込み処理し、当該両ポイントに基づいて該補正オルソの該基準オルソへの移動を示す移動ベクトルを生成し、表示する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、オルソ画像の画像処理装置及びその方法に関する。
【背景技術】
【0002】
近年のナビゲーション装置の普及に伴い、当該ナビゲーション装置で用いられる電子地図データの活用は必至である。また、電子地図データの整備とともに、その精度について更なる要求が高まってきている。
上記電子地図データは、例えば、道路を走行する車輌から連続的に撮影した画像を基にしたオルソ画像などから生成される。そして、複数の車線が存在する道路にあっては、例えば車線毎に走行した場合等、複数回の走行によりオルソ画像を取得することとなる。つまり、得られた複数のオルソ画像の位置を合わせ込みながら上記電子地図データを生成することとなる。このため、この合わせ込みの操作性が、生産性を左右する一因となる。ここで、オルソ画像とは、カメラの傾きや比高等による画像の形状の歪みを補正し、真上から見たかのように正射投影した画像である。
このような技術として、特許文献1では、一方の画像の対応点を、他方の画像の対応点に一致するように画像の配置を移動させる路面標示地図生成装置等が提案されている。
本件発明に関連する従来技術を開示する特許文献2も参照されたい。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2009−223213号公報
【特許文献2】特開2010−175756号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、上記従来技術では、合わせ込み操作のために行った画像の移動量や移動方向についての履歴の確認が困難であった。
そこで本発明者らは、オペレータの作業効率を向上させるべく、オルソ画像の画像処理方法について鋭意検討を重ねてきた。その結果、オルソ画像の合わせ込み処理履歴を目視可能にすることにより、オルソ画像の処理操作の作業効率向上を図り得ることに想到した。
【課題を解決するための手段】
【0005】
この発明は上述の課題に鑑みてなされたものであり、その第1の局面は次のように規定される。即ち、
地図データ保存部から、画像処理の対象となる領域を選択する対象領域選択部と、
第1の走行に基づいて得られた第1のオルソ画像及び第2の走行に基づいて得られた第2のオルソ画像を、夫々位置情報と関連付けて格納するオルソ画像格納部と、
前記オルソ画像格納部から、前記対象領域内に存在する前記画像処理の基準となるオルソ画像を基準オルソとして抽出し、前記位置情報に基づいて該基準オルソを配置する基準オルソ抽出・配置部と、
前記対象領域内において、補正の対象となる領域を補正領域として指定する補正領域指定部と、
前記オルソ画像格納部から、前記補正領域内に存在する、前記基準オルソ以外の前記オルソ画像を補正オルソとして抽出し、前記位置情報に基づいて該補正オルソを配置する補正オルソ抽出・配置部と、
前記補正オルソを前記基準オルソへ合わせ込み処理する指標として、前記基準オルソにおける第1のポイントと、前記補正オルソにおいて前記第1のポイントに対応する第2のポイントとを指定する合わせ込み処理部と、
前記第1のポイント及び前記第2のポイントに基づいて、前記補正オルソの前記基準オルソへの移動を示す移動ベクトル生成部と、
生成された前記移動ベクトルを表示する移動ベクトル表示部と、
を備える画像処理装置。
【0006】
このように規定される第1の局面の画像処理装置によれば、画像処理の対象となる対象領域を選択し、当該対象領域内に存在する基準となるオルソ画像を基準オルソとしてオルソ画像格納部から抽出し、当該基準オルソ画像に関連付けられた位置情報に基づいて当該基準オルソを配置する。そして、当該対象領域内において補正の対象となる補正領域を指定し、当該補正領域内に存在する基準オルソ以外のオルソ画像を補正オルソとしてオルソ画像格納部から抽出し、当該補正オルソ画像に関連付けられた位置情報に基づいて当該補正オルソを配置する。さらに、基準オルソにおける第1のポイントと補正オルソにおける当該第1のポイントに対応する第2のポイントとを指定することにより、補正オルソを基準オルソへ合わせ込む処理を行い、当該合わせ込み処理結果に基づいて、補正オルソの基準オルソへの移動を示す移動ベクトルを生成し、表示する。
このように、画像の合わせ込み処理結果に基づいて移動ベクトルを生成し表示することにより、当該合わせ込み結果を目視にて確認することができるため、合わせ込み処理の修正、追加、削除等を行うオペレータの作業効率を向上させることが可能となる。
また、前記第1のオルソ画像及び前記第2のオルソ画像は、夫々位置精度と関連付けられており、前記基準オルソ抽出・配置部は、前記第1のオルソ画像及び前記第2のオルソ画像のうち、関連付けられた前記位置精度の高いオルソ画像を基準オルソとして抽出することができる(第2の局面)。
【0007】
この発明の第3の局面は次のように規定される。即ち、
第1又は第2の局面に規定の画像処理装置において、前記移動ベクトルは前記第2のポイントから前記第1のポイントへの矢印で表され、
該矢印を制御することにより、前記補正オルソの移動を制御する移動制御部、を備える。
このように規定される第3の局面の画像処理装置によれば、補正オルソの移動を示す矢印を制御することにより、補正オルソの移動を制御することができるため、オペレータの作業効率を向上させることができる。また、前記矢印には、前記合わせ込み処理された順番が関連付けられていることとできる(第4の局面)。
【0008】
また、この発明の第5の局面は次のように規定される。即ち、
地図データ保存部から、画像処理の対象となる領域を選択する対象領域選択ステップと、
第1の走行に基づいて得られた第1のオルソ画像及び第2の走行に基づいて得られた第2のオルソ画像を、夫々位置情報と関連付けて格納するオルソ画像格納ステップと、
前記オルソ画像格納ステップで格納された前記第1のオルソ画像又は前記第2のオルソ画像から、前記対象領域内に存在する前記画像処理の基準となるオルソ画像を基準オルソとして抽出し、前記位置情報に基づいて該基準オルソを配置する基準オルソ抽出・配置ステップと、
前記対象領域内において、補正の対象となる領域を補正領域として指定する補正領域指定ステップと、
前記オルソ画像格納ステップで格納された前記第1のオルソ画像又は前記第2のオルソ画像から、前記補正領域内に存在する、前記基準オルソ以外の前記オルソ画像を補正オルソとして抽出し、前記位置情報に基づいて該補正オルソを配置する補正オルソ抽出・配置ステップと、
前記補正オルソを前記基準オルソへ合わせ込み処理する指標として、前記基準オルソにおける第1のポイントと、前記補正オルソにおいて前記第1のポイントに対応する第2のポイントとを指定する合わせ込み処理ステップと、
前記第1のポイント及び前記第2のポイントに基づいて、前記補正オルソの前記基準オルソへの移動を示す移動ベクトル生成ステップと、
生成された前記移動ベクトルを表示する移動ベクトル表示ステップと、
を備える画像処理方法。
このように規定される第5の局面の発明によれば、第1の局面と同等の効果を奏する。
【0009】
この発明の第6の局面は次のように規定される。即ち、
第5の局面に規定の画像処理方法において、前記第1のオルソ画像及び前記第2のオルソ画像は、夫々位置精度と関連付けられており、
前記基準オルソ抽出・配置ステップは、前記第1のオルソ画像及び前記第2のオルソ画像のうち、関連付けられた前記位置精度の高いオルソ画像を基準オルソとして抽出する。
このように規定される第6の局面の発明によれば、第2の局面と同等の効果を奏する。
【0010】
この発明の第7の局面は次のように規定される。即ち、
第5又は第6の局面に規定の画像処理方法において、前記移動ベクトルは前記第2のポイントから前記第1のポイントへの矢印で表され、
該矢印を制御することにより、前記補正オルソの移動を制御する移動制御ステップ、を備える。
このように規定される第7の局面の発明によれば、第3の局面と同等の効果を奏する。
【0011】
この発明の第8の局面は次のように規定される。即ち、
第5〜第7のいずれかの局面に規定の画像処理方法において、前記矢印には、前記合わせ込み処理された順番が関連付けられている。
このように規定される第8の局面の発明によれば、第4の局面と同等の効果を奏する。
【0012】
更に、この発明の第9の局面は次のように規定される。即ち、
オルソ画像の処理を行うためのコンピュータプログラムであって、コンピュータを、
地図データ保存部から、画像処理の対象となる領域を選択する対象領域選択手段と、
第1の走行に基づいて得られた第1のオルソ画像及び第2の走行に基づいて得られた第2のオルソ画像を、夫々位置情報と関連付けて格納するオルソ画像格納手段と、
前記オルソ画像格納手段で格納された前記第1のオルソ画像又は前記第2のオルソ画像から、前記対象領域内に存在する前記画像処理の基準となるオルソ画像を基準オルソとして抽出し、前記位置情報に基づいて該基準オルソを配置する基準オルソ抽出・配置手段と、
前記対象領域内において、補正の対象となる領域を補正領域として指定する補正領域指定手段と、
前記オルソ画像格納手段で格納された前記第1のオルソ画像又は前記第2のオルソ画像から、前記補正領域内に存在する、前記基準オルソ以外の前記オルソ画像を補正オルソとして抽出し、前記位置情報に基づいて該補正オルソを配置する補正オルソ抽出・配置手段と、
前記補正オルソを前記基準オルソへ合わせ込み処理する指標として、前記基準オルソにおける第1のポイントと、前記補正オルソにおいて前記第1のポイントに対応する第2のポイントとを指定する合わせ込み処理手段と、
前記第1のポイント及び前記第2のポイントに基づいて、前記補正オルソの前記基準オルソへの移動を示す移動ベクトル生成手段と、
生成された前記移動ベクトルを表示する移動ベクトル表示手段と、
を備えるコンピュータプログラム。
このように規定される第9の局面の発明によれば、第1の局面と同等の効果を奏する。
【0013】
この発明の第10の局面は次のように規定される。即ち、
第9の局面に規定のコンピュータプログラムにおいて、前記第1のオルソ画像及び前記第2のオルソ画像は、夫々位置精度と関連付けられており、
前記基準オルソ抽出・配置手段は、前記第1のオルソ画像及び前記第2のオルソ画像のうち、関連付けられた前記位置精度の高いオルソ画像を基準オルソとして抽出する。
このように規定される第10の局面の発明によれば、第2の局面と同等の効果を奏する。
【0014】
この発明の第11の局面は次のように規定される。即ち、
第9又は第10の局面に規定のコンピュータプログラムにおいて、前記移動ベクトルは前記第2のポイントから前記第1のポイントへの矢印で表され、
該矢印を制御することにより、前記補正オルソの移動を制御する移動制御手段、を備える。
このように規定される第11の局面の発明によれば、第3の局面と同等の効果を奏する。
【0015】
この発明の第12の局面は次のように規定される。即ち、
第9〜第11のいずれかの局面に規定のコンピュータプログラムにおいて、前記矢印には、前記合わせ込み処理された順番が関連付けられている。
このように規定される第12の局面の発明によれば、第4の局面と同等の効果を奏する。
【0016】
第9〜第12のいずれかの局面に規定されるコンピュータプログラムを記録する記録媒体が第13の局面として規定される。
【図面の簡単な説明】
【0017】
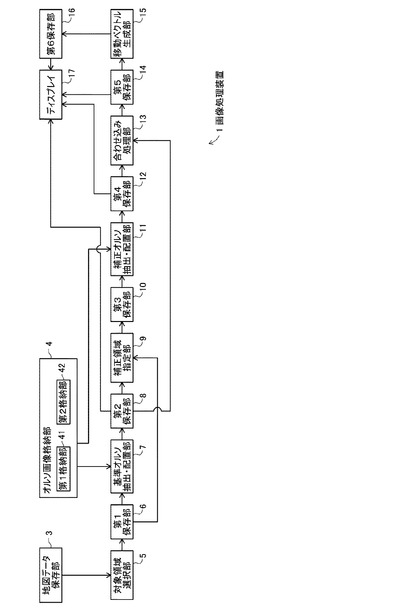
【図1】本発明の実施の形態の画像処理装置の構成を示すブロック図である。
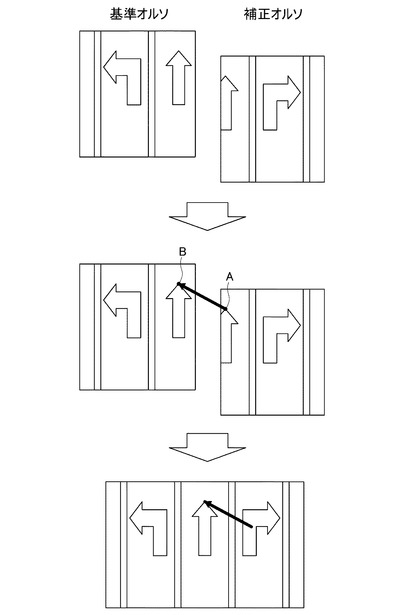
【図2】本発明の画像処理装置における合わせ込み処理を示す模式図である。
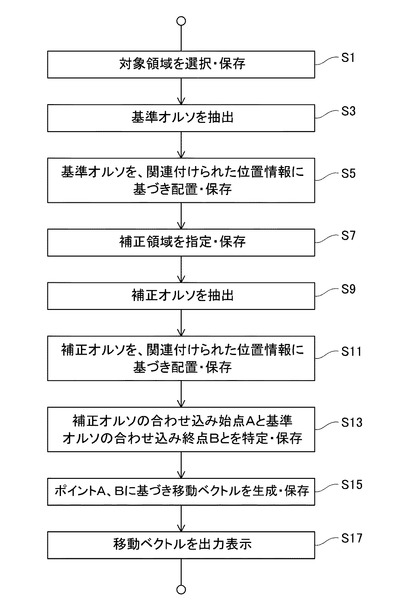
【図3】本発明の実施の形態の画像処理装置の動作を示すフローチャートである。
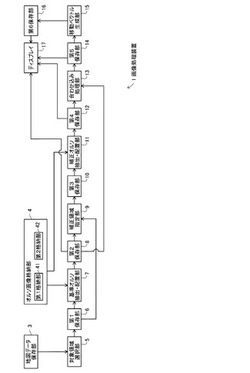
【図4】本発明の実施例の画像処理装置の構成を示すブロック図である。
【図5】本発明の他の実施例の画像処理装置の構成を示すブロック図である。
【発明を実施するための形態】
【0018】
この発明の実施の形態の画像処置装置を説明する。
図1に、画像処理装置1の概略構成を示す。適宜、図2に示す模式図を用いて、以下に説明する。
図1に示すように、この画像処理装置1は、地図データ保存部3、オルソ画像格納部4、対象領域選択部5、第1保存部6、基準オルソ抽出・配置部7、第2保存部8、補正領域指定部9、第3保存部10、補正オルソ抽出・配置部11、第4保存部12、合わせ込み処理部13、第5保存部14、移動ベクトル生成部15、第6保存部16及び移動ベクトル表示部としてのディスプレイ17を備えている。
【0019】
地図データ保存部3には地図情報が保存される。地図情報にはリンクやノードなど地図情報を規定するための道路要素に関する情報と地図に描画される情報等が含まれている。
オルソ画像格納部4は、第1の格納部41及び第2の格納部42を備える。第1の格納部41は、第1の走行に基づいて得られた第1のオルソ画像を格納し、第2の格納部42は、第2の走行に基づいて得られた第2のオルソ画像を格納する。第1のオルソ画像と第2のオルソ画像は、例えば、同一の道路において異なる車線を走行して得られた画像である。オルソ画像格納部4は、第1の格納部41及び第2の格納部42の他、第3の走行に基づいて得られるオルソ画像を格納する第3の格納部・・・第mの走行に基づいて得られるオルソ画像を格納する第mの格納部等を適宜備えることとできる。ここで、第1のオルソ画像〜第mのオルソ画像は、夫々位置情報と関連付けて格納されている。各オルソ画像に関連付けられる位置情報は、位置検出機能とカメラとを備えた車輌が道路を走行してオルソ画像を取得した際の位置検出機能による位置情報とすることができる。位置検出機能として、例えば、GPS装置、ジャイロ装置、車速センサ等が挙げられる。また、上記オルソ画像には位置精度が関連付けられていることが好ましい。当該位置精度としては、GPS装置の受信状況等が挙げられる。このように、オルソ画像に位置精度が関連付けられることにより、後述する基準オルソ抽出・配置部7は、オルソ画像に関連付けられた位置精度を基準にして、位置精度の良いオルソ画像を基準オルソとして抽出することができる。
【0020】
対象領域選択部5は、地図データ保存部3から画像処理の対象となる領域を選択する。当該選択の方法は、特に限定されないが、例えば、オペレータの手動による対象領域の選択を許容するよう設計することとできる。また、別の方法として、当該地図データから任意に指定された範囲内において対象領域を自動的に選択することとしても良い。選択された当該対象領域は第1保存部6に保存される。
基準オルソ抽出・配置部7は、オルソ画像格納部4を参照して、対象領域選択部5で選択された対象領域内に存在する、画像処理の基準となるオルソ画像を基準オルソとして抽出し、当該基準オルソに関連付けられた位置情報に基づいて基準オルソを配置する。当該基準オルソの抽出方法としては、特に限定されないが、例えば、第1のオルソ画像に関連付けられた位置精度と第2のオルソ画像に関連付けられた位置精度とを比較し、当該位置精度の高いオルソ画像を基準オルソとして抽出することとできる。当該位置精度の比較は、第1の格納部41に格納される第1のオルソ画像群と第2の格納部42に格納される第2のオルソ画像群において、オルソ画像の位置精度が所定基準を満たすオルソ画像数が多い格納部に格納されたオルソ画像を基準オルソとして抽出することとできる。当該位置精度の基準としては、位置情報を取得したときのGPS衛星の捕捉数等が挙げられる。抽出された基準オルソは、当該基準オルソに関連付けられた位置情報に基づいて、対象領域選択部5で選択された対象領域内に配置される。配置された当該基準オルソは、対象領域と関連付けて第2保存部8に保存される。
【0021】
補正領域指定部9は、第1保存部6を参照して、対象領域選択部5で選択された対象領域内において、補正の対象となる領域を補正領域として指定する。当該指定の方法は、特に限定されないが、例えば、対象領域内において上記基準オルソが配置されていない領域や、当該対象領域内において既に配置された基準オルソの画像が不鮮明あるいは変形している領域等を、自動により又はオペレータによる手動により指定することとできる。指定された当該補正領域は第3保存部10に保存される。
補正オルソ抽出・配置部11は、オルソ画像格納部4を参照して、補正領域指定部9で指定された補正領域内に存在する、上記基準オルソ以外のオルソ画像を補正オルソとして抽出し、当該補正オルソに関連付けられた位置情報に基づいて補正オルソを配置する。補正オルソ抽出・配置部11は、一の基準オルソに対して、一のオルソ画像を補正オルソとして抽出しても良く、また、オルソ画像格納部4に格納される複数のオルソ画像を補正オルソとして抽出することとしても良い。抽出及び配置された当該補正オルソは、補正領域と関連付けて、あるいは、配置後の新たな位置情報と関連付けて第4保存部12に保存される。
合わせ込み処理部13は、第2保存部8及び第4保存部12を参照し、補正オルソ抽出・配置部11で配置された補正オルソを上記基準オルソへ合わせ込む処理を行う。当該合わせ込み処理の方法としては、特に限定されないが、例えば、オペレータの手動により、補正オルソにおいて合わせ込み始点A(図2に示すポイントA)を特定し、基準オルソにおいて当該ポイントAに対応する合わせ込み終点B(同、ポイントB)を特定することをもって合わせ込み処理とすることができる。当該合わせ込み処理は、一の補正オルソを合わせ込むこととしても良いし、予め補正オルソの範囲を指定し、当該範囲に存在する補正オルソ群を合わせ込むこととしても良い。当該合わせ込み処理の結果は第5保存部14に保存される。
【0022】
移動ベクトル生成部15は、第5保存部14を参照し、補正オルソにおいて特定されたポイントA及び基準オルソにおいて特定されたポイントBに基づいて、移動ベクトルを生成する。すなわち、移動ベクトル生成部15は、ポイントAからポイントBへの移動方向及び移動の大きさを表す移動ベクトルを生成する。当該移動ベクトルには、移動方向、移動距離、移動させる補正オルソの範囲及び複数回移動させたときの移動履歴(例えば、合わせ込み処理された順番等)等の情報が関連付けられていても良い。生成された当該移動ベクトルは第6保存部16に保存される。
ディスプレイ17は、第2保存部8、第4保存部12、第5保存部14及び第6保存部16を参照し、合わせ込み結処理結果を反映させて、基準オルソ及び補正オルソを表示し、これとともに、移動ベクトル生成部15で生成された移動ベクトルを第6保存部16から読み出し、当該移動ベクトルをディスプレイに表示する。移動ベクトルの表示は、特に限定されないが、例えば、ポイントAからポイントBへの矢印で表すこととできる。また、このとき、基準オルソと補正オルソとが重複する範囲については、基準オルソを優先的に表示することが好ましい。
【0023】
図3を用いて、図1に示す画像処理装置1の動作を説明する。
まず、ステップ1では、地図データ保存部3を参照し、画像処理の対象となる対象領域を選択し、保存する。
ステップ3では、基準オルソ抽出・配置部7は、ステップ1で選択された対象領域内に存在するオルソ画像を基準オルソとしてオルソ画像格納部4内の第1の格納部41あるいは第2の格納部42から抽出する。当該基準オルソをいずれの格納部から抽出するかについては、特に限定されないが、位置精度の高いオルソ画像が格納された格納部から抽出することが好ましい。すなわち、例えば、各格納部に格納されたオルソ画像の位置精度に基づいて格納部全体としての位置精度を求め、当該位置精度の高い格納部に格納されたオルソ画像を基準オルソとして抽出することとできる。また、予め各格納部に位置精度が付与されている場合には、当該付与された位置精度に基づいて基準オルソを抽出しても良い。
ステップ5では、基準オルソ抽出・配置部7は、ステップ3で抽出された基準オルソを、当該基準オルソに関連付けられた位置情報に基づき、ステップ1で選択された対象領域内に配置し、保存する。
【0024】
ステップ7では、ステップ1で選択された対象領域とステップ5で配置された基準オルソとに基づいて、対象領域内で補正の対象となる領域を補正領域として指定し、保存する。
ステップ9では、補正オルソ抽出・配置部11は、ステップ7で指定された補正領域内に存在する基準オルソ以外のオルソ画像を補正オルソとして抽出する。
ステップ11では、補正オルソ抽出・配置部11は、ステップ9で抽出された補正オルソを、当該補正オルソに関連付けられた位置情報に基づき、ステップ7で指定された補正領域内に配置し、保存する。
ステップ13では、ステップ11で配置された補正オルソをステップ5で配置された基準オルソへ合わせ込む処理を行う。すなわち、オペレータの手動により、又は自動で、補正オルソにおける合わせ込み始点Aを特定し、さらに、基準オルソにおける合わせ込み終点Bを特定することにより、合わせ込み処理を行う。
ステップ15では、ステップ13で特定されたポイントAとポイントBとを結ぶ移動ベクトルを生成し、保存する。当該生成された移動ベクトルは、ディスプレイ等により表示される(ステップ17)。
【0025】
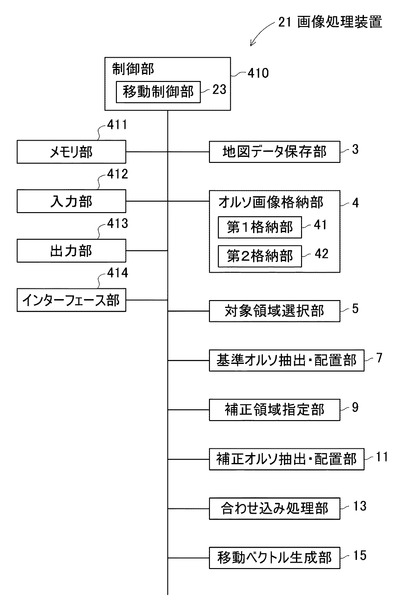
図4は、この発明の実施例の画像処理装置21のブロック図である。図4において、図1と同一の要素には同一の符号を付して、その説明を部分的に省略する。
図4に示すのは、生成された移動ベクトルを制御することにより補正オルソの移動を制御可能な画像処理装置21である。すなわち、当該装置21は、図1に示す装置1において、制御部410、メモリ部411、入力部412、出力部413及びインターフェース部414を更に備えている。
制御部410はCPU、バッファメモリその他の装置を備えたコンピュータ装置であり、画像処理装置21を構成する他の要素を制御する。この制御部410は、移動制御部23を備えている。
移動制御部23は、後述する入力部412におけるオペレータの指令に基づいて、補正オルソの移動を制御する。すなわち、当該移動ベクトルを削除する指令が入力された場合には、補正オルソの移動はキャンセルされる。また、当該移動ベクトルの大きさ、方向を変更する指令が入力された場合には、当該変更後の移動ベクトルの大きさ、方向に応じて補正オルソの移動を変更する。また、これら移動のキャンセルや変更は、移動ベクトルを制御することによって行うこととしても良いし、移動ベクトルに関連付けられたデータをキャンセル、変更することにより行うこととしても良い。
【0026】
メモリ部411にはコンピュータプログラムが保存され、このコンピュータプログラムはコンピュータ装置である制御部410に読み込まれて、これを機能させる。このコンピュータプログラムは、端末装置又は移動体端末装置の記憶装置としての内蔵ハードディスク又は内蔵メモリ、端末装置又は移動体端末装置に差し替え可能な記憶媒体としてのSD(登録商標)メモリカード、メモリスティック、スマートメディア、コンパクトフラッシュ(登録商標)、DVD等の汎用的な媒体へ保存できる。
入力部412は、例えば、オペレータの指令の入力に用いられる。また、移動ベクトルにコメントを関連付けたいときなどには、当該コメントの入力の際に用いることとできる。入力部412として、マウス、ライトペン又はディスプレイの表示内容と協働するタッチパネル等のポインティングデバイスやキーボード又はマイクロホン等の音声入力装置を用いることができる。
出力部413はディスプレイを含み、入力画面や、格納部3に格納されたオルソ画像等、その他の情報を表示する。また、移動ベクトル生成部15で生成された移動ベクトルを表示する移動ベクトル表示部としても機能する。この出力部413は音声発信部を含むこともできる。
インターフェース部414は画像処理装置21を無線ネットワーク等へ連結させる。
【0027】
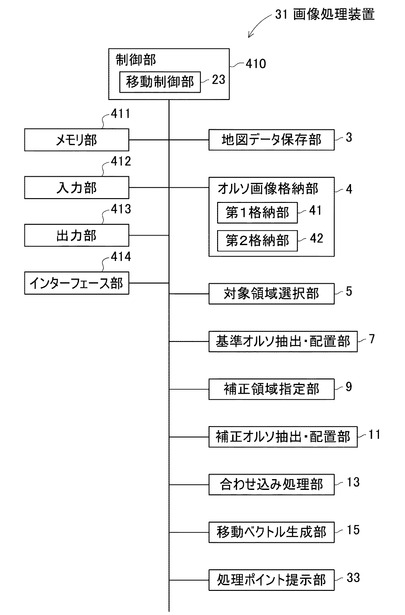
図5は、この発明の他の実施例の画像処理装置31のブロック図である。図5において、図1及び図4と同一の要素には同一の符号を付して、その説明を部分的に省略する。
図5に示すのは、合わせ込み処理を行うポイントを提示可能な画像処理装置31である。すなわち、当該装置31は、図4に示す装置21において、処理ポイント提示部33を更に備えている。
処理ポイント提示部33は、補正オルソにおいて合わせ込み処理をするポイントを提示する。すなわち、対象領域内において既にされた合わせ込み処理の結果に基づいて、未処理の領域における合わせ込み処理ポイントの提示を行う。例えば、既に二以上の合わせ込み処理されている場合において、合わせ込み始点間の間隔に基づき次の合わせ込みポイントを提示することとできる。当該提示の方法としては、補正オルソにおいて合わせ込み処理を提示するポイントを点滅させる等により行うこととできる。また、当該処理ポイントの提示と併せて、合わせ込み量や合わせ込み方向を提示することとしても良い。また、当該処理ポイントの提示に代えて、あるいは当該提示と併せて、合わせ込み処理を行うべき補正オルソを提示することとしても良い。
上記処理ポイント提示部33で提示された処理ポイントに基づき、オペレータの手動により補正オルソの合わせ込み処理を行うこととできる。また、上記のように、処理ポイントに加えて、合わせ込み量や合わせ込み方向が提示されている場合には、上記移動ベクトル生成部15は、当該提示内容に基づいて自動で補正オルソの合わせ込み処理を行うこととしても良い。
【0028】
以上、本発明の実施の形態について説明してきたが、これらのうち、2つ以上の実施の形態を組み合わせて実施しても構わない。あるいは、これらのうち、1つの実施の形態を部分的に実施しても構わない。さらには、これらのうち、2つ以上の実施の形態を部分的に組み合わせて実施しても構わない。
この発明は、上記発明の実施の形態及び実施例の説明に何ら限定されるものではない。特許請求の範囲の記載を逸脱せず、当業者が容易に想到できる範囲で種々の変形態様もこの発明に含まれる。
【符号の説明】
【0029】
1 21 31 画像処理装置
3 地図データ保存部
4 オルソ画像格納部
5 対象領域選択部
7 基準オルソ抽出・配置部
9 補正領域指定部
11 補正オルソ抽出・配置部
13 合わせ込み処理部
15 移動ベクトル生成部
17 ディスプレイ
23 移動制御部
33 処理ポイント提示部
【技術分野】
【0001】
本発明は、オルソ画像の画像処理装置及びその方法に関する。
【背景技術】
【0002】
近年のナビゲーション装置の普及に伴い、当該ナビゲーション装置で用いられる電子地図データの活用は必至である。また、電子地図データの整備とともに、その精度について更なる要求が高まってきている。
上記電子地図データは、例えば、道路を走行する車輌から連続的に撮影した画像を基にしたオルソ画像などから生成される。そして、複数の車線が存在する道路にあっては、例えば車線毎に走行した場合等、複数回の走行によりオルソ画像を取得することとなる。つまり、得られた複数のオルソ画像の位置を合わせ込みながら上記電子地図データを生成することとなる。このため、この合わせ込みの操作性が、生産性を左右する一因となる。ここで、オルソ画像とは、カメラの傾きや比高等による画像の形状の歪みを補正し、真上から見たかのように正射投影した画像である。
このような技術として、特許文献1では、一方の画像の対応点を、他方の画像の対応点に一致するように画像の配置を移動させる路面標示地図生成装置等が提案されている。
本件発明に関連する従来技術を開示する特許文献2も参照されたい。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2009−223213号公報
【特許文献2】特開2010−175756号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、上記従来技術では、合わせ込み操作のために行った画像の移動量や移動方向についての履歴の確認が困難であった。
そこで本発明者らは、オペレータの作業効率を向上させるべく、オルソ画像の画像処理方法について鋭意検討を重ねてきた。その結果、オルソ画像の合わせ込み処理履歴を目視可能にすることにより、オルソ画像の処理操作の作業効率向上を図り得ることに想到した。
【課題を解決するための手段】
【0005】
この発明は上述の課題に鑑みてなされたものであり、その第1の局面は次のように規定される。即ち、
地図データ保存部から、画像処理の対象となる領域を選択する対象領域選択部と、
第1の走行に基づいて得られた第1のオルソ画像及び第2の走行に基づいて得られた第2のオルソ画像を、夫々位置情報と関連付けて格納するオルソ画像格納部と、
前記オルソ画像格納部から、前記対象領域内に存在する前記画像処理の基準となるオルソ画像を基準オルソとして抽出し、前記位置情報に基づいて該基準オルソを配置する基準オルソ抽出・配置部と、
前記対象領域内において、補正の対象となる領域を補正領域として指定する補正領域指定部と、
前記オルソ画像格納部から、前記補正領域内に存在する、前記基準オルソ以外の前記オルソ画像を補正オルソとして抽出し、前記位置情報に基づいて該補正オルソを配置する補正オルソ抽出・配置部と、
前記補正オルソを前記基準オルソへ合わせ込み処理する指標として、前記基準オルソにおける第1のポイントと、前記補正オルソにおいて前記第1のポイントに対応する第2のポイントとを指定する合わせ込み処理部と、
前記第1のポイント及び前記第2のポイントに基づいて、前記補正オルソの前記基準オルソへの移動を示す移動ベクトル生成部と、
生成された前記移動ベクトルを表示する移動ベクトル表示部と、
を備える画像処理装置。
【0006】
このように規定される第1の局面の画像処理装置によれば、画像処理の対象となる対象領域を選択し、当該対象領域内に存在する基準となるオルソ画像を基準オルソとしてオルソ画像格納部から抽出し、当該基準オルソ画像に関連付けられた位置情報に基づいて当該基準オルソを配置する。そして、当該対象領域内において補正の対象となる補正領域を指定し、当該補正領域内に存在する基準オルソ以外のオルソ画像を補正オルソとしてオルソ画像格納部から抽出し、当該補正オルソ画像に関連付けられた位置情報に基づいて当該補正オルソを配置する。さらに、基準オルソにおける第1のポイントと補正オルソにおける当該第1のポイントに対応する第2のポイントとを指定することにより、補正オルソを基準オルソへ合わせ込む処理を行い、当該合わせ込み処理結果に基づいて、補正オルソの基準オルソへの移動を示す移動ベクトルを生成し、表示する。
このように、画像の合わせ込み処理結果に基づいて移動ベクトルを生成し表示することにより、当該合わせ込み結果を目視にて確認することができるため、合わせ込み処理の修正、追加、削除等を行うオペレータの作業効率を向上させることが可能となる。
また、前記第1のオルソ画像及び前記第2のオルソ画像は、夫々位置精度と関連付けられており、前記基準オルソ抽出・配置部は、前記第1のオルソ画像及び前記第2のオルソ画像のうち、関連付けられた前記位置精度の高いオルソ画像を基準オルソとして抽出することができる(第2の局面)。
【0007】
この発明の第3の局面は次のように規定される。即ち、
第1又は第2の局面に規定の画像処理装置において、前記移動ベクトルは前記第2のポイントから前記第1のポイントへの矢印で表され、
該矢印を制御することにより、前記補正オルソの移動を制御する移動制御部、を備える。
このように規定される第3の局面の画像処理装置によれば、補正オルソの移動を示す矢印を制御することにより、補正オルソの移動を制御することができるため、オペレータの作業効率を向上させることができる。また、前記矢印には、前記合わせ込み処理された順番が関連付けられていることとできる(第4の局面)。
【0008】
また、この発明の第5の局面は次のように規定される。即ち、
地図データ保存部から、画像処理の対象となる領域を選択する対象領域選択ステップと、
第1の走行に基づいて得られた第1のオルソ画像及び第2の走行に基づいて得られた第2のオルソ画像を、夫々位置情報と関連付けて格納するオルソ画像格納ステップと、
前記オルソ画像格納ステップで格納された前記第1のオルソ画像又は前記第2のオルソ画像から、前記対象領域内に存在する前記画像処理の基準となるオルソ画像を基準オルソとして抽出し、前記位置情報に基づいて該基準オルソを配置する基準オルソ抽出・配置ステップと、
前記対象領域内において、補正の対象となる領域を補正領域として指定する補正領域指定ステップと、
前記オルソ画像格納ステップで格納された前記第1のオルソ画像又は前記第2のオルソ画像から、前記補正領域内に存在する、前記基準オルソ以外の前記オルソ画像を補正オルソとして抽出し、前記位置情報に基づいて該補正オルソを配置する補正オルソ抽出・配置ステップと、
前記補正オルソを前記基準オルソへ合わせ込み処理する指標として、前記基準オルソにおける第1のポイントと、前記補正オルソにおいて前記第1のポイントに対応する第2のポイントとを指定する合わせ込み処理ステップと、
前記第1のポイント及び前記第2のポイントに基づいて、前記補正オルソの前記基準オルソへの移動を示す移動ベクトル生成ステップと、
生成された前記移動ベクトルを表示する移動ベクトル表示ステップと、
を備える画像処理方法。
このように規定される第5の局面の発明によれば、第1の局面と同等の効果を奏する。
【0009】
この発明の第6の局面は次のように規定される。即ち、
第5の局面に規定の画像処理方法において、前記第1のオルソ画像及び前記第2のオルソ画像は、夫々位置精度と関連付けられており、
前記基準オルソ抽出・配置ステップは、前記第1のオルソ画像及び前記第2のオルソ画像のうち、関連付けられた前記位置精度の高いオルソ画像を基準オルソとして抽出する。
このように規定される第6の局面の発明によれば、第2の局面と同等の効果を奏する。
【0010】
この発明の第7の局面は次のように規定される。即ち、
第5又は第6の局面に規定の画像処理方法において、前記移動ベクトルは前記第2のポイントから前記第1のポイントへの矢印で表され、
該矢印を制御することにより、前記補正オルソの移動を制御する移動制御ステップ、を備える。
このように規定される第7の局面の発明によれば、第3の局面と同等の効果を奏する。
【0011】
この発明の第8の局面は次のように規定される。即ち、
第5〜第7のいずれかの局面に規定の画像処理方法において、前記矢印には、前記合わせ込み処理された順番が関連付けられている。
このように規定される第8の局面の発明によれば、第4の局面と同等の効果を奏する。
【0012】
更に、この発明の第9の局面は次のように規定される。即ち、
オルソ画像の処理を行うためのコンピュータプログラムであって、コンピュータを、
地図データ保存部から、画像処理の対象となる領域を選択する対象領域選択手段と、
第1の走行に基づいて得られた第1のオルソ画像及び第2の走行に基づいて得られた第2のオルソ画像を、夫々位置情報と関連付けて格納するオルソ画像格納手段と、
前記オルソ画像格納手段で格納された前記第1のオルソ画像又は前記第2のオルソ画像から、前記対象領域内に存在する前記画像処理の基準となるオルソ画像を基準オルソとして抽出し、前記位置情報に基づいて該基準オルソを配置する基準オルソ抽出・配置手段と、
前記対象領域内において、補正の対象となる領域を補正領域として指定する補正領域指定手段と、
前記オルソ画像格納手段で格納された前記第1のオルソ画像又は前記第2のオルソ画像から、前記補正領域内に存在する、前記基準オルソ以外の前記オルソ画像を補正オルソとして抽出し、前記位置情報に基づいて該補正オルソを配置する補正オルソ抽出・配置手段と、
前記補正オルソを前記基準オルソへ合わせ込み処理する指標として、前記基準オルソにおける第1のポイントと、前記補正オルソにおいて前記第1のポイントに対応する第2のポイントとを指定する合わせ込み処理手段と、
前記第1のポイント及び前記第2のポイントに基づいて、前記補正オルソの前記基準オルソへの移動を示す移動ベクトル生成手段と、
生成された前記移動ベクトルを表示する移動ベクトル表示手段と、
を備えるコンピュータプログラム。
このように規定される第9の局面の発明によれば、第1の局面と同等の効果を奏する。
【0013】
この発明の第10の局面は次のように規定される。即ち、
第9の局面に規定のコンピュータプログラムにおいて、前記第1のオルソ画像及び前記第2のオルソ画像は、夫々位置精度と関連付けられており、
前記基準オルソ抽出・配置手段は、前記第1のオルソ画像及び前記第2のオルソ画像のうち、関連付けられた前記位置精度の高いオルソ画像を基準オルソとして抽出する。
このように規定される第10の局面の発明によれば、第2の局面と同等の効果を奏する。
【0014】
この発明の第11の局面は次のように規定される。即ち、
第9又は第10の局面に規定のコンピュータプログラムにおいて、前記移動ベクトルは前記第2のポイントから前記第1のポイントへの矢印で表され、
該矢印を制御することにより、前記補正オルソの移動を制御する移動制御手段、を備える。
このように規定される第11の局面の発明によれば、第3の局面と同等の効果を奏する。
【0015】
この発明の第12の局面は次のように規定される。即ち、
第9〜第11のいずれかの局面に規定のコンピュータプログラムにおいて、前記矢印には、前記合わせ込み処理された順番が関連付けられている。
このように規定される第12の局面の発明によれば、第4の局面と同等の効果を奏する。
【0016】
第9〜第12のいずれかの局面に規定されるコンピュータプログラムを記録する記録媒体が第13の局面として規定される。
【図面の簡単な説明】
【0017】
【図1】本発明の実施の形態の画像処理装置の構成を示すブロック図である。
【図2】本発明の画像処理装置における合わせ込み処理を示す模式図である。
【図3】本発明の実施の形態の画像処理装置の動作を示すフローチャートである。
【図4】本発明の実施例の画像処理装置の構成を示すブロック図である。
【図5】本発明の他の実施例の画像処理装置の構成を示すブロック図である。
【発明を実施するための形態】
【0018】
この発明の実施の形態の画像処置装置を説明する。
図1に、画像処理装置1の概略構成を示す。適宜、図2に示す模式図を用いて、以下に説明する。
図1に示すように、この画像処理装置1は、地図データ保存部3、オルソ画像格納部4、対象領域選択部5、第1保存部6、基準オルソ抽出・配置部7、第2保存部8、補正領域指定部9、第3保存部10、補正オルソ抽出・配置部11、第4保存部12、合わせ込み処理部13、第5保存部14、移動ベクトル生成部15、第6保存部16及び移動ベクトル表示部としてのディスプレイ17を備えている。
【0019】
地図データ保存部3には地図情報が保存される。地図情報にはリンクやノードなど地図情報を規定するための道路要素に関する情報と地図に描画される情報等が含まれている。
オルソ画像格納部4は、第1の格納部41及び第2の格納部42を備える。第1の格納部41は、第1の走行に基づいて得られた第1のオルソ画像を格納し、第2の格納部42は、第2の走行に基づいて得られた第2のオルソ画像を格納する。第1のオルソ画像と第2のオルソ画像は、例えば、同一の道路において異なる車線を走行して得られた画像である。オルソ画像格納部4は、第1の格納部41及び第2の格納部42の他、第3の走行に基づいて得られるオルソ画像を格納する第3の格納部・・・第mの走行に基づいて得られるオルソ画像を格納する第mの格納部等を適宜備えることとできる。ここで、第1のオルソ画像〜第mのオルソ画像は、夫々位置情報と関連付けて格納されている。各オルソ画像に関連付けられる位置情報は、位置検出機能とカメラとを備えた車輌が道路を走行してオルソ画像を取得した際の位置検出機能による位置情報とすることができる。位置検出機能として、例えば、GPS装置、ジャイロ装置、車速センサ等が挙げられる。また、上記オルソ画像には位置精度が関連付けられていることが好ましい。当該位置精度としては、GPS装置の受信状況等が挙げられる。このように、オルソ画像に位置精度が関連付けられることにより、後述する基準オルソ抽出・配置部7は、オルソ画像に関連付けられた位置精度を基準にして、位置精度の良いオルソ画像を基準オルソとして抽出することができる。
【0020】
対象領域選択部5は、地図データ保存部3から画像処理の対象となる領域を選択する。当該選択の方法は、特に限定されないが、例えば、オペレータの手動による対象領域の選択を許容するよう設計することとできる。また、別の方法として、当該地図データから任意に指定された範囲内において対象領域を自動的に選択することとしても良い。選択された当該対象領域は第1保存部6に保存される。
基準オルソ抽出・配置部7は、オルソ画像格納部4を参照して、対象領域選択部5で選択された対象領域内に存在する、画像処理の基準となるオルソ画像を基準オルソとして抽出し、当該基準オルソに関連付けられた位置情報に基づいて基準オルソを配置する。当該基準オルソの抽出方法としては、特に限定されないが、例えば、第1のオルソ画像に関連付けられた位置精度と第2のオルソ画像に関連付けられた位置精度とを比較し、当該位置精度の高いオルソ画像を基準オルソとして抽出することとできる。当該位置精度の比較は、第1の格納部41に格納される第1のオルソ画像群と第2の格納部42に格納される第2のオルソ画像群において、オルソ画像の位置精度が所定基準を満たすオルソ画像数が多い格納部に格納されたオルソ画像を基準オルソとして抽出することとできる。当該位置精度の基準としては、位置情報を取得したときのGPS衛星の捕捉数等が挙げられる。抽出された基準オルソは、当該基準オルソに関連付けられた位置情報に基づいて、対象領域選択部5で選択された対象領域内に配置される。配置された当該基準オルソは、対象領域と関連付けて第2保存部8に保存される。
【0021】
補正領域指定部9は、第1保存部6を参照して、対象領域選択部5で選択された対象領域内において、補正の対象となる領域を補正領域として指定する。当該指定の方法は、特に限定されないが、例えば、対象領域内において上記基準オルソが配置されていない領域や、当該対象領域内において既に配置された基準オルソの画像が不鮮明あるいは変形している領域等を、自動により又はオペレータによる手動により指定することとできる。指定された当該補正領域は第3保存部10に保存される。
補正オルソ抽出・配置部11は、オルソ画像格納部4を参照して、補正領域指定部9で指定された補正領域内に存在する、上記基準オルソ以外のオルソ画像を補正オルソとして抽出し、当該補正オルソに関連付けられた位置情報に基づいて補正オルソを配置する。補正オルソ抽出・配置部11は、一の基準オルソに対して、一のオルソ画像を補正オルソとして抽出しても良く、また、オルソ画像格納部4に格納される複数のオルソ画像を補正オルソとして抽出することとしても良い。抽出及び配置された当該補正オルソは、補正領域と関連付けて、あるいは、配置後の新たな位置情報と関連付けて第4保存部12に保存される。
合わせ込み処理部13は、第2保存部8及び第4保存部12を参照し、補正オルソ抽出・配置部11で配置された補正オルソを上記基準オルソへ合わせ込む処理を行う。当該合わせ込み処理の方法としては、特に限定されないが、例えば、オペレータの手動により、補正オルソにおいて合わせ込み始点A(図2に示すポイントA)を特定し、基準オルソにおいて当該ポイントAに対応する合わせ込み終点B(同、ポイントB)を特定することをもって合わせ込み処理とすることができる。当該合わせ込み処理は、一の補正オルソを合わせ込むこととしても良いし、予め補正オルソの範囲を指定し、当該範囲に存在する補正オルソ群を合わせ込むこととしても良い。当該合わせ込み処理の結果は第5保存部14に保存される。
【0022】
移動ベクトル生成部15は、第5保存部14を参照し、補正オルソにおいて特定されたポイントA及び基準オルソにおいて特定されたポイントBに基づいて、移動ベクトルを生成する。すなわち、移動ベクトル生成部15は、ポイントAからポイントBへの移動方向及び移動の大きさを表す移動ベクトルを生成する。当該移動ベクトルには、移動方向、移動距離、移動させる補正オルソの範囲及び複数回移動させたときの移動履歴(例えば、合わせ込み処理された順番等)等の情報が関連付けられていても良い。生成された当該移動ベクトルは第6保存部16に保存される。
ディスプレイ17は、第2保存部8、第4保存部12、第5保存部14及び第6保存部16を参照し、合わせ込み結処理結果を反映させて、基準オルソ及び補正オルソを表示し、これとともに、移動ベクトル生成部15で生成された移動ベクトルを第6保存部16から読み出し、当該移動ベクトルをディスプレイに表示する。移動ベクトルの表示は、特に限定されないが、例えば、ポイントAからポイントBへの矢印で表すこととできる。また、このとき、基準オルソと補正オルソとが重複する範囲については、基準オルソを優先的に表示することが好ましい。
【0023】
図3を用いて、図1に示す画像処理装置1の動作を説明する。
まず、ステップ1では、地図データ保存部3を参照し、画像処理の対象となる対象領域を選択し、保存する。
ステップ3では、基準オルソ抽出・配置部7は、ステップ1で選択された対象領域内に存在するオルソ画像を基準オルソとしてオルソ画像格納部4内の第1の格納部41あるいは第2の格納部42から抽出する。当該基準オルソをいずれの格納部から抽出するかについては、特に限定されないが、位置精度の高いオルソ画像が格納された格納部から抽出することが好ましい。すなわち、例えば、各格納部に格納されたオルソ画像の位置精度に基づいて格納部全体としての位置精度を求め、当該位置精度の高い格納部に格納されたオルソ画像を基準オルソとして抽出することとできる。また、予め各格納部に位置精度が付与されている場合には、当該付与された位置精度に基づいて基準オルソを抽出しても良い。
ステップ5では、基準オルソ抽出・配置部7は、ステップ3で抽出された基準オルソを、当該基準オルソに関連付けられた位置情報に基づき、ステップ1で選択された対象領域内に配置し、保存する。
【0024】
ステップ7では、ステップ1で選択された対象領域とステップ5で配置された基準オルソとに基づいて、対象領域内で補正の対象となる領域を補正領域として指定し、保存する。
ステップ9では、補正オルソ抽出・配置部11は、ステップ7で指定された補正領域内に存在する基準オルソ以外のオルソ画像を補正オルソとして抽出する。
ステップ11では、補正オルソ抽出・配置部11は、ステップ9で抽出された補正オルソを、当該補正オルソに関連付けられた位置情報に基づき、ステップ7で指定された補正領域内に配置し、保存する。
ステップ13では、ステップ11で配置された補正オルソをステップ5で配置された基準オルソへ合わせ込む処理を行う。すなわち、オペレータの手動により、又は自動で、補正オルソにおける合わせ込み始点Aを特定し、さらに、基準オルソにおける合わせ込み終点Bを特定することにより、合わせ込み処理を行う。
ステップ15では、ステップ13で特定されたポイントAとポイントBとを結ぶ移動ベクトルを生成し、保存する。当該生成された移動ベクトルは、ディスプレイ等により表示される(ステップ17)。
【0025】
図4は、この発明の実施例の画像処理装置21のブロック図である。図4において、図1と同一の要素には同一の符号を付して、その説明を部分的に省略する。
図4に示すのは、生成された移動ベクトルを制御することにより補正オルソの移動を制御可能な画像処理装置21である。すなわち、当該装置21は、図1に示す装置1において、制御部410、メモリ部411、入力部412、出力部413及びインターフェース部414を更に備えている。
制御部410はCPU、バッファメモリその他の装置を備えたコンピュータ装置であり、画像処理装置21を構成する他の要素を制御する。この制御部410は、移動制御部23を備えている。
移動制御部23は、後述する入力部412におけるオペレータの指令に基づいて、補正オルソの移動を制御する。すなわち、当該移動ベクトルを削除する指令が入力された場合には、補正オルソの移動はキャンセルされる。また、当該移動ベクトルの大きさ、方向を変更する指令が入力された場合には、当該変更後の移動ベクトルの大きさ、方向に応じて補正オルソの移動を変更する。また、これら移動のキャンセルや変更は、移動ベクトルを制御することによって行うこととしても良いし、移動ベクトルに関連付けられたデータをキャンセル、変更することにより行うこととしても良い。
【0026】
メモリ部411にはコンピュータプログラムが保存され、このコンピュータプログラムはコンピュータ装置である制御部410に読み込まれて、これを機能させる。このコンピュータプログラムは、端末装置又は移動体端末装置の記憶装置としての内蔵ハードディスク又は内蔵メモリ、端末装置又は移動体端末装置に差し替え可能な記憶媒体としてのSD(登録商標)メモリカード、メモリスティック、スマートメディア、コンパクトフラッシュ(登録商標)、DVD等の汎用的な媒体へ保存できる。
入力部412は、例えば、オペレータの指令の入力に用いられる。また、移動ベクトルにコメントを関連付けたいときなどには、当該コメントの入力の際に用いることとできる。入力部412として、マウス、ライトペン又はディスプレイの表示内容と協働するタッチパネル等のポインティングデバイスやキーボード又はマイクロホン等の音声入力装置を用いることができる。
出力部413はディスプレイを含み、入力画面や、格納部3に格納されたオルソ画像等、その他の情報を表示する。また、移動ベクトル生成部15で生成された移動ベクトルを表示する移動ベクトル表示部としても機能する。この出力部413は音声発信部を含むこともできる。
インターフェース部414は画像処理装置21を無線ネットワーク等へ連結させる。
【0027】
図5は、この発明の他の実施例の画像処理装置31のブロック図である。図5において、図1及び図4と同一の要素には同一の符号を付して、その説明を部分的に省略する。
図5に示すのは、合わせ込み処理を行うポイントを提示可能な画像処理装置31である。すなわち、当該装置31は、図4に示す装置21において、処理ポイント提示部33を更に備えている。
処理ポイント提示部33は、補正オルソにおいて合わせ込み処理をするポイントを提示する。すなわち、対象領域内において既にされた合わせ込み処理の結果に基づいて、未処理の領域における合わせ込み処理ポイントの提示を行う。例えば、既に二以上の合わせ込み処理されている場合において、合わせ込み始点間の間隔に基づき次の合わせ込みポイントを提示することとできる。当該提示の方法としては、補正オルソにおいて合わせ込み処理を提示するポイントを点滅させる等により行うこととできる。また、当該処理ポイントの提示と併せて、合わせ込み量や合わせ込み方向を提示することとしても良い。また、当該処理ポイントの提示に代えて、あるいは当該提示と併せて、合わせ込み処理を行うべき補正オルソを提示することとしても良い。
上記処理ポイント提示部33で提示された処理ポイントに基づき、オペレータの手動により補正オルソの合わせ込み処理を行うこととできる。また、上記のように、処理ポイントに加えて、合わせ込み量や合わせ込み方向が提示されている場合には、上記移動ベクトル生成部15は、当該提示内容に基づいて自動で補正オルソの合わせ込み処理を行うこととしても良い。
【0028】
以上、本発明の実施の形態について説明してきたが、これらのうち、2つ以上の実施の形態を組み合わせて実施しても構わない。あるいは、これらのうち、1つの実施の形態を部分的に実施しても構わない。さらには、これらのうち、2つ以上の実施の形態を部分的に組み合わせて実施しても構わない。
この発明は、上記発明の実施の形態及び実施例の説明に何ら限定されるものではない。特許請求の範囲の記載を逸脱せず、当業者が容易に想到できる範囲で種々の変形態様もこの発明に含まれる。
【符号の説明】
【0029】
1 21 31 画像処理装置
3 地図データ保存部
4 オルソ画像格納部
5 対象領域選択部
7 基準オルソ抽出・配置部
9 補正領域指定部
11 補正オルソ抽出・配置部
13 合わせ込み処理部
15 移動ベクトル生成部
17 ディスプレイ
23 移動制御部
33 処理ポイント提示部
【特許請求の範囲】
【請求項1】
地図データ保存部から、画像処理の対象となる領域を選択する対象領域選択部と、
第1の走行に基づいて得られた第1のオルソ画像及び第2の走行に基づいて得られた第2のオルソ画像を、夫々位置情報と関連付けて格納するオルソ画像格納部と、
前記オルソ画像格納部から、前記対象領域内に存在する前記画像処理の基準となるオルソ画像を基準オルソとして抽出し、前記位置情報に基づいて該基準オルソを配置する基準オルソ抽出・配置部と、
前記対象領域内において、補正の対象となる領域を補正領域として指定する補正領域指定部と、
前記オルソ画像格納部から、前記補正領域内に存在する、前記基準オルソ以外の前記オルソ画像を補正オルソとして抽出し、前記位置情報に基づいて該補正オルソを配置する補正オルソ抽出・配置部と、
前記補正オルソを前記基準オルソへ合わせ込み処理する指標として、前記基準オルソにおける第1のポイントと、前記補正オルソにおいて前記第1のポイントに対応する第2のポイントとを指定する合わせ込み処理部と、
前記第1のポイント及び前記第2のポイントに基づいて、前記補正オルソの前記基準オルソへの移動を示す移動ベクトル生成部と、
生成された前記移動ベクトルを表示する移動ベクトル表示部と、
を備える画像処理装置。
【請求項2】
前記第1のオルソ画像及び前記第2のオルソ画像は、夫々位置精度と関連付けられており、
前記基準オルソ抽出・配置部は、前記第1のオルソ画像及び前記第2のオルソ画像のうち、関連付けられた前記位置精度の高いオルソ画像を基準オルソとして抽出する、
請求項1に記載の画像処理装置。
【請求項3】
前記移動ベクトルは前記第2のポイントから前記第1のポイントへの矢印で表され、
該矢印を制御することにより、前記補正オルソの移動を制御する移動制御部、
を備える請求項1又は2に記載の画像処理装置。
【請求項4】
前記矢印には、前記合わせ込み処理された順番が関連付けられている、請求項1〜3のいずれか一項に記載の画像処理装置。
【請求項5】
地図データ保存部から、画像処理の対象となる領域を選択する対象領域選択ステップと、
第1の走行に基づいて得られた第1のオルソ画像及び第2の走行に基づいて得られた第2のオルソ画像を、夫々位置情報と関連付けて格納するオルソ画像格納ステップと、
前記オルソ画像格納ステップで格納された前記第1のオルソ画像又は前記第2のオルソ画像から、前記対象領域内に存在する前記画像処理の基準となるオルソ画像を基準オルソとして抽出し、前記位置情報に基づいて該基準オルソを配置する基準オルソ抽出・配置ステップと、
前記対象領域内において、補正の対象となる領域を補正領域として指定する補正領域指定ステップと、
前記オルソ画像格納ステップで格納された前記第1のオルソ画像又は前記第2のオルソ画像から、前記補正領域内に存在する、前記基準オルソ以外の前記オルソ画像を補正オルソとして抽出し、前記位置情報に基づいて該補正オルソを配置する補正オルソ抽出・配置ステップと、
前記補正オルソを前記基準オルソへ合わせ込み処理する指標として、前記基準オルソにおける第1のポイントと、前記補正オルソにおいて前記第1のポイントに対応する第2のポイントとを指定する合わせ込み処理ステップと、
前記第1のポイント及び前記第2のポイントに基づいて、前記補正オルソの前記基準オルソへの移動を示す移動ベクトル生成ステップと、
生成された前記移動ベクトルを表示する移動ベクトル表示ステップと、
を備える画像処理方法。
【請求項6】
前記第1のオルソ画像及び前記第2のオルソ画像は、夫々位置精度と関連付けられており、
前記基準オルソ抽出・配置ステップは、前記第1のオルソ画像及び前記第2のオルソ画像のうち、関連付けられた前記位置精度の高いオルソ画像を基準オルソとして抽出する、
請求項5に記載の画像処理方法。
【請求項7】
前記移動ベクトルは前記第2のポイントから前記第1のポイントへの矢印で表され、
該矢印を制御することにより、前記補正オルソの移動を制御する移動制御ステップ、
を備える請求項5又は6に記載の画像処理方法。
【請求項8】
前記矢印には、前記合わせ込み処理された順番が関連付けられている、請求項5〜7のいずれか一項に記載の画像処理方法。
【請求項9】
オルソ画像の処理を行うためのコンピュータプログラムであって、コンピュータを、
地図データ保存部から、画像処理の対象となる領域を選択する対象領域選択手段と、
第1の走行に基づいて得られた第1のオルソ画像及び第2の走行に基づいて得られた第2のオルソ画像を、夫々位置情報と関連付けて格納するオルソ画像格納手段と、
前記オルソ画像格納手段で格納された前記第1のオルソ画像又は前記第2のオルソ画像から、前記対象領域内に存在する前記画像処理の基準となるオルソ画像を基準オルソとして抽出し、前記位置情報に基づいて該基準オルソを配置する基準オルソ抽出・配置手段と、
前記対象領域内において、補正の対象となる領域を補正領域として指定する補正領域指定手段と、
前記オルソ画像格納手段で格納された前記第1のオルソ画像又は前記第2のオルソ画像から、前記補正領域内に存在する、前記基準オルソ以外の前記オルソ画像を補正オルソとして抽出し、前記位置情報に基づいて該補正オルソを配置する補正オルソ抽出・配置手段と、
前記補正オルソを前記基準オルソへ合わせ込み処理する指標として、前記基準オルソにおける第1のポイントと、前記補正オルソにおいて前記第1のポイントに対応する第2のポイントとを指定する合わせ込み処理手段と、
前記第1のポイント及び前記第2のポイントに基づいて、前記補正オルソの前記基準オルソへの移動を示す移動ベクトル生成手段と、
生成された前記移動ベクトルを表示する移動ベクトル表示手段と、
を備えるコンピュータプログラム。
【請求項10】
前記第1のオルソ画像及び前記第2のオルソ画像は、夫々位置精度と関連付けられており、
前記基準オルソ抽出・配置手段は、前記第1のオルソ画像及び前記第2のオルソ画像のうち、関連付けられた前記位置精度の高いオルソ画像を基準オルソとして抽出する、
請求項9に記載のコンピュータプログラム。
【請求項11】
前記移動ベクトルは前記第2のポイントから前記第1のポイントへの矢印で表され、
該矢印を制御することにより、前記補正オルソの移動を制御する移動制御手段、
を備える請求項9又は10に記載のコンピュータプログラム。
【請求項12】
前記矢印には、前記合わせ込み処理された順番が関連付けられている、請求項9〜11のいずれか一項に記載のコンピュータプログラム。
【請求項13】
請求項9〜請求項12のいずれか一項に記載のコンピュータプログラムを記録する記録媒体。
【請求項1】
地図データ保存部から、画像処理の対象となる領域を選択する対象領域選択部と、
第1の走行に基づいて得られた第1のオルソ画像及び第2の走行に基づいて得られた第2のオルソ画像を、夫々位置情報と関連付けて格納するオルソ画像格納部と、
前記オルソ画像格納部から、前記対象領域内に存在する前記画像処理の基準となるオルソ画像を基準オルソとして抽出し、前記位置情報に基づいて該基準オルソを配置する基準オルソ抽出・配置部と、
前記対象領域内において、補正の対象となる領域を補正領域として指定する補正領域指定部と、
前記オルソ画像格納部から、前記補正領域内に存在する、前記基準オルソ以外の前記オルソ画像を補正オルソとして抽出し、前記位置情報に基づいて該補正オルソを配置する補正オルソ抽出・配置部と、
前記補正オルソを前記基準オルソへ合わせ込み処理する指標として、前記基準オルソにおける第1のポイントと、前記補正オルソにおいて前記第1のポイントに対応する第2のポイントとを指定する合わせ込み処理部と、
前記第1のポイント及び前記第2のポイントに基づいて、前記補正オルソの前記基準オルソへの移動を示す移動ベクトル生成部と、
生成された前記移動ベクトルを表示する移動ベクトル表示部と、
を備える画像処理装置。
【請求項2】
前記第1のオルソ画像及び前記第2のオルソ画像は、夫々位置精度と関連付けられており、
前記基準オルソ抽出・配置部は、前記第1のオルソ画像及び前記第2のオルソ画像のうち、関連付けられた前記位置精度の高いオルソ画像を基準オルソとして抽出する、
請求項1に記載の画像処理装置。
【請求項3】
前記移動ベクトルは前記第2のポイントから前記第1のポイントへの矢印で表され、
該矢印を制御することにより、前記補正オルソの移動を制御する移動制御部、
を備える請求項1又は2に記載の画像処理装置。
【請求項4】
前記矢印には、前記合わせ込み処理された順番が関連付けられている、請求項1〜3のいずれか一項に記載の画像処理装置。
【請求項5】
地図データ保存部から、画像処理の対象となる領域を選択する対象領域選択ステップと、
第1の走行に基づいて得られた第1のオルソ画像及び第2の走行に基づいて得られた第2のオルソ画像を、夫々位置情報と関連付けて格納するオルソ画像格納ステップと、
前記オルソ画像格納ステップで格納された前記第1のオルソ画像又は前記第2のオルソ画像から、前記対象領域内に存在する前記画像処理の基準となるオルソ画像を基準オルソとして抽出し、前記位置情報に基づいて該基準オルソを配置する基準オルソ抽出・配置ステップと、
前記対象領域内において、補正の対象となる領域を補正領域として指定する補正領域指定ステップと、
前記オルソ画像格納ステップで格納された前記第1のオルソ画像又は前記第2のオルソ画像から、前記補正領域内に存在する、前記基準オルソ以外の前記オルソ画像を補正オルソとして抽出し、前記位置情報に基づいて該補正オルソを配置する補正オルソ抽出・配置ステップと、
前記補正オルソを前記基準オルソへ合わせ込み処理する指標として、前記基準オルソにおける第1のポイントと、前記補正オルソにおいて前記第1のポイントに対応する第2のポイントとを指定する合わせ込み処理ステップと、
前記第1のポイント及び前記第2のポイントに基づいて、前記補正オルソの前記基準オルソへの移動を示す移動ベクトル生成ステップと、
生成された前記移動ベクトルを表示する移動ベクトル表示ステップと、
を備える画像処理方法。
【請求項6】
前記第1のオルソ画像及び前記第2のオルソ画像は、夫々位置精度と関連付けられており、
前記基準オルソ抽出・配置ステップは、前記第1のオルソ画像及び前記第2のオルソ画像のうち、関連付けられた前記位置精度の高いオルソ画像を基準オルソとして抽出する、
請求項5に記載の画像処理方法。
【請求項7】
前記移動ベクトルは前記第2のポイントから前記第1のポイントへの矢印で表され、
該矢印を制御することにより、前記補正オルソの移動を制御する移動制御ステップ、
を備える請求項5又は6に記載の画像処理方法。
【請求項8】
前記矢印には、前記合わせ込み処理された順番が関連付けられている、請求項5〜7のいずれか一項に記載の画像処理方法。
【請求項9】
オルソ画像の処理を行うためのコンピュータプログラムであって、コンピュータを、
地図データ保存部から、画像処理の対象となる領域を選択する対象領域選択手段と、
第1の走行に基づいて得られた第1のオルソ画像及び第2の走行に基づいて得られた第2のオルソ画像を、夫々位置情報と関連付けて格納するオルソ画像格納手段と、
前記オルソ画像格納手段で格納された前記第1のオルソ画像又は前記第2のオルソ画像から、前記対象領域内に存在する前記画像処理の基準となるオルソ画像を基準オルソとして抽出し、前記位置情報に基づいて該基準オルソを配置する基準オルソ抽出・配置手段と、
前記対象領域内において、補正の対象となる領域を補正領域として指定する補正領域指定手段と、
前記オルソ画像格納手段で格納された前記第1のオルソ画像又は前記第2のオルソ画像から、前記補正領域内に存在する、前記基準オルソ以外の前記オルソ画像を補正オルソとして抽出し、前記位置情報に基づいて該補正オルソを配置する補正オルソ抽出・配置手段と、
前記補正オルソを前記基準オルソへ合わせ込み処理する指標として、前記基準オルソにおける第1のポイントと、前記補正オルソにおいて前記第1のポイントに対応する第2のポイントとを指定する合わせ込み処理手段と、
前記第1のポイント及び前記第2のポイントに基づいて、前記補正オルソの前記基準オルソへの移動を示す移動ベクトル生成手段と、
生成された前記移動ベクトルを表示する移動ベクトル表示手段と、
を備えるコンピュータプログラム。
【請求項10】
前記第1のオルソ画像及び前記第2のオルソ画像は、夫々位置精度と関連付けられており、
前記基準オルソ抽出・配置手段は、前記第1のオルソ画像及び前記第2のオルソ画像のうち、関連付けられた前記位置精度の高いオルソ画像を基準オルソとして抽出する、
請求項9に記載のコンピュータプログラム。
【請求項11】
前記移動ベクトルは前記第2のポイントから前記第1のポイントへの矢印で表され、
該矢印を制御することにより、前記補正オルソの移動を制御する移動制御手段、
を備える請求項9又は10に記載のコンピュータプログラム。
【請求項12】
前記矢印には、前記合わせ込み処理された順番が関連付けられている、請求項9〜11のいずれか一項に記載のコンピュータプログラム。
【請求項13】
請求項9〜請求項12のいずれか一項に記載のコンピュータプログラムを記録する記録媒体。
【図1】


【図2】
【図3】
【図4】
【図5】
【図2】
【図3】
【図4】
【図5】
【公開番号】特開2013−72936(P2013−72936A)
【公開日】平成25年4月22日(2013.4.22)
【国際特許分類】
【出願番号】特願2011−210380(P2011−210380)
【出願日】平成23年9月27日(2011.9.27)
【出願人】(501271479)株式会社トヨタマップマスター (56)
【Fターム(参考)】
【公開日】平成25年4月22日(2013.4.22)
【国際特許分類】
【出願日】平成23年9月27日(2011.9.27)
【出願人】(501271479)株式会社トヨタマップマスター (56)
【Fターム(参考)】
[ Back to top ]