
画像処理装置及び方法、並びに画像表示装置及び方法
【課題】補間フレームの前後のフレームの一方で画像が隠れる場合にも、少ない演算量で正しく補間を行うことを可能にする。
【解決手段】入力画像を縮小した画像において動きベクトル(SMV1,SMV2)を推定し(6)、動きベクトルを拡大することで入力画像上で動きベクトル(MV1、MV2)を求め(7)、これを用いて補間フレームのデータを生成する(13、14)。縮小画像上での動きベクトルの推定にあたりテスト補間(4)により動きベクトルの候補を評価する(5)。テスト補間には前後のフレームのうちの一方のみによる零次補間を含める。
【解決手段】入力画像を縮小した画像において動きベクトル(SMV1,SMV2)を推定し(6)、動きベクトルを拡大することで入力画像上で動きベクトル(MV1、MV2)を求め(7)、これを用いて補間フレームのデータを生成する(13、14)。縮小画像上での動きベクトルの推定にあたりテスト補間(4)により動きベクトルの候補を評価する(5)。テスト補間には前後のフレームのうちの一方のみによる零次補間を含める。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、画像処理装置及び方法、並びに画像表示装置及び方法に関する。本発明は特に、画像のフレーム間に新たな補間フレームを挿入するフレーム補間処理に関するものである。
【背景技術】
【0002】
液晶ディスプレイなどのホールド型ディスプレイは、1フレーム期間同じ画像を表示し続けており、画像中の物体が動いた場合に、動く物体に対する人間の目の追従が連続的に移動するのに対して、物体の移動が1フレーム単位の不連続な移動を行っているためにエッジ部分がぼやけて見える問題がある。これに対し、フレームを補間することで表示フレーム数を多くして物体の移動をスムーズにすることが考えられる。
【0003】
また、映画などのフィルム映像がテレビ信号に変換された素材については、両者(フィルム映像とテレビ信号)のフレーム周波数の違いから、2フレーム又は3フレームが同じフレームから作られた画像信号となっており、そのまま表示すると、動きがぼやけたり、動きがギクシャクしたジャダーが発生したりする問題がある。
【0004】
また、同様にコンピュータ処理された映像がテレビ信号に変換された素材についても、2フレームが同じフレームから作られた画像信号であり、そのまま表示すると同様にジャダーが発生する問題がある。
【0005】
従来の画像処理装置及び方法は、補間フレームに対して1フレーム前のフレームと同じ画像で補間する零次ホールド法か、補間フレームに対して1フレーム前の画像と1フレーム後の画像の平均画像で補間する平均値補間法などがあるが、零次ホールド法は、一定方向に動く画像に対して、滑らかな移動をしないので、依然ホールド型ディスプレイのぼやけの問題は解決されない。また、平均値補間法は、動いた画像が2重像になる問題がある。
【0006】
この改善策として、補間フレームの補間画素に対して点対称の位置にある時間的に前のフレーム上の画素と時間的に後のフレーム上の画素との画素間の相関が最も大きい画素から補間フレームの補間画素を生成するものがある(例えば、特許文献1参照)。この方法では、画素単位での相関検出のため、画像の内容が異なるにも拘らず、画素間の相関が大きいと検出される場合があり、正しく補間フレームが生成できない場合がある。
【先行技術文献】
【特許文献】
【0007】
【特許文献1】特開2006−129181号公報(第8頁、第3図)
【発明の概要】
【発明が解決しようとする課題】
【0008】
従来のフレーム補間処理は、上記の様に構成されており、動きがぼやけたり、動きがギクシャクしたジャダーが発生したりする問題がある。また、画素単位の相関を検出する方法では、正しく相関検出ができないために正しく補間フレームが生成できず、特に補間するフレーム前後で物体が隠れたり出現したりする場合、補間フレームが著しく乱れるという問題、及びフレーム補間処理は演算量が多い(ハードウェアでは回路規模が大きい)という問題がある。
【課題を解決するための手段】
【0009】
本発明の画像処理装置は、
画像の現フレームと前記現フレームの1フレーム前のフレームである第1の遅延フレームとの間に補間フレームを挿入する画像処理装置において、
前記第1の遅延フレームのデータ及び前記現フレームの2フレーム前のフレームである第2の遅延フレームのデータを参照して前記第2の遅延フレームから前記第1の遅延フレームへの第1の動きベクトルを算出し、
前記現フレームのデータ及び前記第1の遅延フレームのデータを参照して前記現フレームから前記第1の遅延フレームへの第2の動きベクトルを算出する動きベクトル検出部と、
前記第1の動きベクトルを前記第1の遅延フレームから前記補間フレームへの第3の動きベクトルに変換し、
前記第2の動きベクトルを前記現フレームから前記補間フレームへの第4の動きベクトルに変換する動きベクトル変換部と、
前記第3の動きベクトル、前記第4の動きベクトル、前記第1の遅延フレームのデータ、及び前記現フレームのデータから、前記補間フレームのデータを生成し、前記補間フレームのデータを前記現フレームのデータと前記第1の遅延フレームのデータの間に挿入した画像データを出力する補間フレーム生成部とを有し、
前記動きベクトル検出部は、
前記現フレームを縮小して現縮小フレームを出力し、前記第1の遅延フレームを縮小して第1の縮小遅延フレームを出力し、前記第2の遅延フレームを縮小して第2の縮小遅延フレームを出力する画像縮小部と、
前記補間フレームの補間対象ブロックに対応する、前記第1の縮小遅延フレーム内のブロックを処理対象ブロックとして設定し、
前記第2の縮小遅延フレームの一部をなすブロックのデータ及び前記現縮小フレームの一部をなすブロックのデータの画素ごとの平均値で構成される第1群のテスト補間データと、
前記現フレームの一部をなすブロックのデータで構成される第2群のテスト補間データと、
前記第2の縮小遅延フレームのブロックデータ構成される第3群のテスト補間データと
を含む複数のテスト補間データを出力するテスト補間部と、
前記第1乃至第3群のテスト補間データのうち、前記処理対象ブロックのデータに対する前記各テスト補間データの相関の強さを評価し、該評価の結果を示す複数の評価データを出力する補間データ評価部と、
前記複数の評価データのうち最も相関の強いことを示す前記評価データを生じさせた前記テスト補間データに対応する動きベクトルを第1の縮小動きベクトル及び第2の縮小動きベクトルの少なくとも一方として出力する動きベクトル決定部と、
前記第1の縮小動きベクトル及び第2の縮小動きベクトルの少なくとも一方を拡大して前記第1及び第2の動きベクトルの少なくとも一方として出力する動きベクトル拡大部とを有し、
前記第1群のテスト補間データは、複数の前記第2の縮小遅延フレームのブロックのデータ及び複数の前記現縮小フレームのブロックから得られ、
前記第2群のテスト補間データは、複数の前記現縮小フレームのブロックから得られ、
前記第3群のテスト補間データは、複数の前記第2の縮小遅延フレームのブロックから得られる
ことを特徴とする。
【発明の効果】
【0010】
本発明によれば、時間的に連続する3枚のフレームの中心のフレームを最も確からしいものとして、時間的に前のフレーム及び後のフレームから中心のフレームへの動きベクトルを評価することで高精度な動きベクトルを算出することができるため、画像の乱れなく補間フレームを内挿することができる。さらに補間するフレーム前後で物体が隠れたり出現したりする場合でも、画像の乱れなく補間フレームを内挿することができる。また、動きベクトルの検出に縮小画像を用いることで、演算量(回路規模)を削減することができる。
【図面の簡単な説明】
【0011】
【図1】本発明の実施の形態1に係る画像表示装置の構成を示すブロック図である。
【図2】図1の動きベクトル検出部12内のテスト補間部4の具体例を示すブロック図である。
【図3】図1の動きベクトル2内の補間データ評価部5及び動きベクトル決定部6の具体例を示すブロック図である。
【図4】図1の動きベクトル検出部12の動作を説明するための図である。
【図5】図1の動きベクトル変換部13及び補間フレーム生成部14の動作を説明するための図である。
【図6】図1の動きベクトル変換部13及び補間フレーム生成部14の動作を説明するための図である。
【図7】図1の動きベクトル変換部13及び補間フレーム生成部14の動作を説明するための図である。
【図8】現フレーム、第1及び第2の遅延フレームのそれぞれにおける画像の例を示す図である。
【図9】図8に示す入力画像を縮小した画像データの具体例を示す図である。
【図10】第1の縮小遅延フレームSF1上の処理対象ブロックを中心として、点対称の位置にある第2の縮小遅延フレームSF2及び現縮小フレームSF0に位置する2対のブロックを示す図である。
【図11】図10の2対のブロックのうちの一対のデータに基づく、テスト補間データの生成を示す図である。1の動きベクトル検出部12の動作の具体例を説明するための図である。
【図12】図10の2対のブロックのうちの他の一対のデータに基づく、テスト補間データの生成を示す図である。
【図13】現縮小フレームSF0上の一つのブロックのデータに基づくテスト補間データの生成を示す図である。
【図14】現縮小フレームSF0上の他の一つのブロックのデータに基づくテスト補間データの生成を示す図である。
【図15】第2の縮小遅延フレームSF2上の一つのブロックのデータに基づくテスト補間データの生成を示す図である。
【図16】第2の縮小遅延フレームSF2上の他の一つのブロックのデータに基づくテスト補間データの生成を示す図である。
【図17】図1の動きベクトル拡大部7の動作の具体例を説明するための図である。
【図18】(a)及び(b)は、図1の動きベクトル変換部13の動作の具体例を説明するための図である。
【図19】図1の補間フレーム生成部14の動作の具体例を説明するための図である。
【図20】本発明に係る画像処理をソフトウェアで実現する場合に利用されるコンピュータシステムで構成された画像処理装置を示すブロック図である。
【図21】本実施の形態に係る画像表示装置の処理工程を示すフローチャートである。
【発明を実施するための形態】
【0012】
以下、本発明の実施の形態を図面により説明する。本発明に係る画像処理装置は、画像の現フレームと現フレームの1フレーム前のフレームとの間に新たな補間フレームを補間により生成するものであり、本発明に係る画像表示装置には、上記の画像処理装置から出力された画像データを表示する画像表示部を備えるものである。
【0013】
実施の形態1.
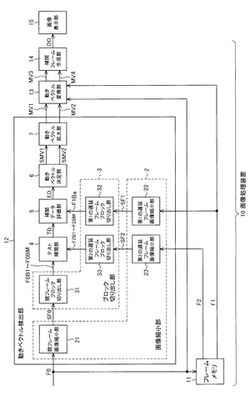
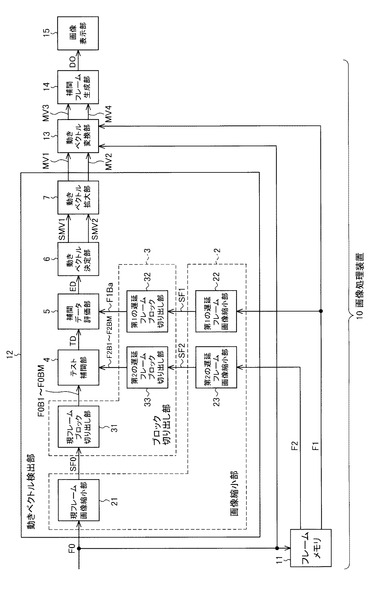
図1は、本発明の実施の形態1に係る画像表示装置の構成を示す図である。実施の形態1に係る画像表示装置は、画像処理装置10と、画像表示部15を備え、画像処理装置10は、フレームメモリ11と、動きベクトル検出部12と、動きベクトル変換部13と、補間フレーム生成部14と、画像表示部15を備える。
【0014】
この画像処理装置は、例えば、放送受信装置、画像記録再生装置、又はパーソナルコンピュータ(PC)などの一部を構成することができる。また、画像表示装置5は、例えば、テレビ、映像プロジェクター、又はPCなどの一部を構成することができる。
【0015】
画像データF0が、フレームメモリ11、動きベクトル検出部12、及び補間フレーム生成部14に入力される。
フレームメモリ11は、画像データF0を2フレーム分保存し、画像データF0に対して1フレーム分遅延した画像データF1と、画像データF0に対して2フレーム分遅延した画像データF2を出力する。これより画像データF0を現フレームのデータ、画像データF1を第1の遅延フレームのデータ、画像データF2を第2の遅延フレームのデータと言う。また、現フレーム、第1の遅延フレーム、第2の遅延フレームをそれぞれのフレームデータと同じ符号F0、F1、F2で表す。
【0016】
第1の遅延フレームF1のデータは動きベクトル検出部12と補間フレーム生成部14に入力され、第2の遅延フレームF2のデータは動きベクトル検出部12に入力される。
【0017】
動きベクトル検出部12は、現フレームF0のデータと、第1の遅延フレームF1のデータと、第2の遅延フレームF2のデータを参照して、第1の遅延フレームF1上の複数のブロックの各々(フレームの一部を成す、複数の画素で構成される)を順次選択し、選択されているブロックについて、第2の遅延フレームF2から第1の遅延フレームF1への第1の動きベクトルMV1及び現フレームF0から第1の遅延フレームF1への第2の動きベクトルMV2を算出して、動きベクトル変換部13に出力する。第1の遅延フレームF1上のブロックは、第1の遅延フレームF1を例えば複数の矩形の領域に分割することで得られるものである。
【0018】
動きベクトル変換部13は、第1の動きベクトルMV1と第2の動きベクトルMV2を、第1の遅延フレームF1から補間フレームIFへの第3の動きベクトルMV3と、現フレームF0から補間フレームIFへの第4の動きベクトルMV4に変換して、補間フレーム生成部14に出力する。
【0019】
補間フレーム生成部14は、第1の遅延フレームF1のデータ、現フレームF0のデータ、第3の動きベクトルMV3及び第4の動きベクトルMV4から、現フレームF0と第1の遅延フレームF1の間に位置する補間フレームIFのデータを生成し、生成した補間フレームIFのデータを現フレームF0のデータと第1の遅延フレームF1のデータの間に挿入した画像データDOを画像表示部15に出力する。
画像表示部15は、画像データDOを表示する。
【0020】
次に、動きベクトル検出部12の構成について詳細に説明する。
動きベクトル検出部12は、画像縮小部2と、ブロック切り出し部3と、テスト補間部4と、補間データ評価部5と、動きベクトル決定部6と、動きベクトル拡大部7とを有し、画像縮小部2は、現フレーム画像縮小部21と、第1の遅延フレーム画像縮小部22と、第2の遅延フレーム画像縮小部23とを有し、ブロック切り出し部3は、現フレームブロック切り出し部31と、第1の遅延フレームブロック切り出し部32と、第2の遅延フレームブロック切り出し部33とを有する。
【0021】
現フレーム画像縮小部21は、現フレームF0を縮小して現縮小フレームSF0を出力し、第1の遅延フレーム画像縮小部22は、第1の遅延フレームF1を縮小して第1の縮小遅延フレームSF1を出力し、第2の遅延フレーム画像縮小部23は、第2の遅延フレームF2を縮小して第2の縮小遅延フレームSF2を出力する。現フレーム画像縮小部21、第1の遅延フレーム画像縮小部22、及び第2の遅延フレーム画像縮小部23における縮小率は同じであり、符号αで表される。
【0022】
現フレームブロック切り出し部31、第1の遅延フレームブロック切り出し部32、及び第2の遅延フレームブロック切り出し部33は、それぞれ、現縮小フレームSF0、第1の縮小遅延フレームSF1、及び第2の縮小遅延フレームSF2を受け、それぞれ、画面の一部を成すブロックを切り出し(抽出し)、ブロック内の画素のデータ(画素値)の集合をブロックデータとして出力する。即ち、現フレームブロック切り出し部31は、現縮小フレームSF0からブロックを切り出し、第1の遅延フレームブロック切り出し部32は、第1の縮小遅延フレームSF1からブロックを切り出し、第2の遅延フレームブロック切り出し部33は、第2の縮小遅延フレームSF2からブロックを切り出す。
【0023】
各ブロックは例えば横方向X個、縦方向Y個の画素(Y個のライン)のサイズを有する矩形の領域から成る。即ち、現縮小フレームSF0から切り出されるブロックと、第1の縮小遅延フレームSF1から切り出されるブロックと、第2の縮小遅延フレームSF2から切り出されるブロックは、縦方向のサイズ(画素数)及び横方向のサイズ(画素数乃至ライン数)が互いに等しい。
【0024】
以下では、補間フレームIF内の一つのブロックを補間により生成するに当たっての処理を説明する。この処理のためには、補間フレームIF内の補間しようとするブロック(補間対象ブロック)を、縮小フレームSF0、SF1、SF2を生成する際と同じ縮小率αで縮小したブロック(縮小ブロック)に対応する、第1の縮小遅延フレームSF1内の一つのブロックF1Baを処理対象ブロックとして設定し、該処理対象ブロックF1Baと、現縮小フレームSF0内の複数のブロックと、第2の縮小遅延フレームSF2内の複数のブロックが切り出される(抽出される)。現縮小フレームSF0から切り出されるブロックと、第2の縮小遅延フレームSF2から切り出されるブロックとは、処理対象ブロックF1Ba(厳密には、その中心)を中心として点対称の位置にあるもので、これらが対として用いられる。
現フレームブロック切り出し部31及び第2の遅延フレームブロック切り出し部33は、処理対象ブロックF1Baを中心とし、互いに点対称の位置にあり、一方が現縮小フレームSF0内に位置し、他方が第2の縮小遅延フレームSF2内に位置するブロックの対を複数個切り出す。
【0025】
例えば、現縮小フレームSF0から切り出されるブロックF0B1(厳密には、その中心)と、第2の縮小遅延フレームSF2から切り出されるブロックF2B1(厳密には、その中心)とは、第1の縮小遅延フレームSF1内の処理対象ブロックF1Ba(厳密には、その中心)を中心として点対称の位置にあるもので、これらの点対称の位置にある2つのブロックが対(ペア)として用いられる。
【0026】
現縮小フレームSF0及び第2の縮小遅延フレームSF2から切り出されるブロックの対は、動きベクトル検出部12において検出される動きベクトルの候補に対応するものであり、例えば動きベクトルの探索範囲内のすべてのブロックが切り出される。例えば、第1の縮小遅延フレームSF1内の一つのブロックの中心を中心として、横方向に±HS画素、縦方向に±VS画素(±VSライン)の範囲を探索する場合、第2の縮小遅延フレームSF2及び現縮小フレームSF0から、それぞれ(2HS+1)×(2VS+1)個のブロックが切り出される。
【0027】
なお、探索範囲内のすべてのブロックについて評価を行う必要がない場合、例えば予め或いは他の情報により動きの方向の範囲が予測できる場合には、上記の探索範囲の予測される範囲内のブロックのみを切り出すこととしても良い。また、探索範囲内のブロックを間引きながら(例えば水平方向及び垂直方向に1画素おきに)切り出すこととしても良い。
【0028】
以下では、現縮小フレームSF0及び第2の縮小遅延フレームSF2から切り出されるブロックの数をMとし、現縮小フレームSF0から切り出されるブロックを第1乃至第MのブロックF0B1〜F0BM、第2の縮小遅延フレームSF2から切り出されるブロックを第1乃至第MのブロックF2B1〜F2BMと呼ぶ。また、各ブロックのデータをブロックと同じ符号で表す。
【0029】
第2の縮小遅延フレームSF2内の第mのブロックF2Bm(m=1〜M)と現縮小フレームSF0内の第mのブロックF0Bmとは、第2の縮小遅延フレームSF1内の処理対象ブロックF1Ba(厳密にはその中心の画素)を中心として点対称の位置にあるので、ブロックF2Bmの処理対象ブロックF1Baに対する横方向のずれをh(h=−HS〜+HS)、縦方向のずれをv(v=−VS〜+VS)とすると、ブロックF0Bmの処理対象ブロックF1Baに対する横方向のずれは−h、縦方向のずれは−vである。
【0030】
現フレームブロック切り出し部31は、現縮小フレーム内の複数の、即ち第1乃至第Mのブロックを切り出して、第1乃至第MのブロックデータF0B1〜F0BMを出力する。
第1の遅延フレームブロック切り出し部32は、第1の縮小遅延フレーム内の処理対象ブロックF1Baを切り出す。このブロックブロックF1Baは、補間フレームIF内の補間対象ブロックを縮小したブロックに対応するものである。
第2の遅延フレームブロック切り出し部33は、第2の縮小遅延フレーム内の複数の、即ち第1乃至第Mのブロックを切り出して、第1乃至第MのブロックデータF2B1〜F2BMを出力する。
【0031】
現縮小フレームSF0のブロックデータと第2の縮小遅延フレームSF2のブロックデータが、テスト補間部4に入力される。テスト補間部4は、第2の縮小遅延フレームSF2のブロックデータと現縮小フレームSF0のブロックデータのうち、処理対象ブロックF1Baを中心として、互いに点対称の位置にある第2の縮小遅延フレームSF2内のブロックと、現縮小フレームSF0内のブロックから成るブロック対のデータに基づいて、テスト補間データTDA1〜TDAMを生成する。複数のブロック対に基づいて複数のテスト補間データが生成される。このテスト補間は、上記点対称の中心の位置、即ち上記処理対象ブロックF1Baのデータが未知であると仮定して行うものであり、補間が正確であればあるほど、テスト補間データは、処理対象ブロックF1Baのデータとの相関が強いものとなる。
【0032】
テスト補間部4は、さらに入力された現縮小フレームSF0のブロックデータをそのまま処理対象ブロックF1Baの位置のデータとしたものを、テスト補間データTDB1〜TDBMとして出力し、入力された第2の縮小遅延フレームSF2のブロックデータをそのまま処理対象ブロックF1Baの位置のデータとしたものを、テスト補間データTDC1〜TDCMとして出力する。
区別のため、テスト補間データTDA1〜TDAMは第1群の第1乃至第Mのテスト補間データと呼ばれ、テスト補間データTDB1〜TDBMは第2群の第1乃至第Mのテスト補間データと呼ばれ、テスト補間データTDC1〜TDCMは第3群の第1乃至第Mのテスト補間データと呼ばれる。
【0033】
補間データ評価部5は、第1の縮小遅延フレームSF1のブロックデータを参照して複数のテスト補間データの評価を行い、評価データEDを動きベクトル決定部6に出力する。この評価においては、テスト補間データと、第1の縮小遅延フレームSF1のブロックデータとの相関を求め、相関が強いほど高い評価が与えられる。
【0034】
動きベクトル決定部6は、評価データEDに基づいて第1の縮小動きベクトルSMV1と第2の縮小動きベクトルSMV2を生成して出力する。
【0035】
動きベクトル拡大部7は、第1の縮小動きベクトルSMV1と第2の縮小動きベクトルSMV2の値を拡大して第1の動きベクトルMV1と第2の動きベクトルMV2を生成して出力する。ここで、拡大率は縮小フレームSF0、SF1、SF2の生成の際の縮小率αの逆数に等しく、1/αで表される。
【0036】
次に、図2及び図3を参照して動きベクトル検出部12のテスト補間部4、補間データ評価部5及び動きベクトル決定部の具体例についてさらに詳しく説明する。
【0037】
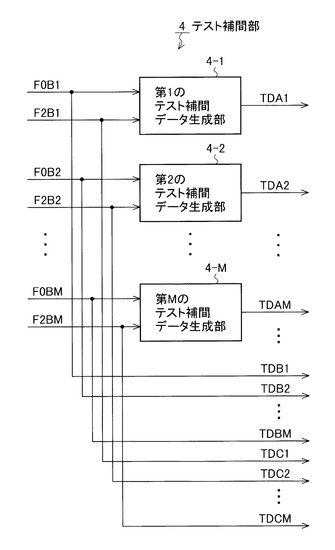
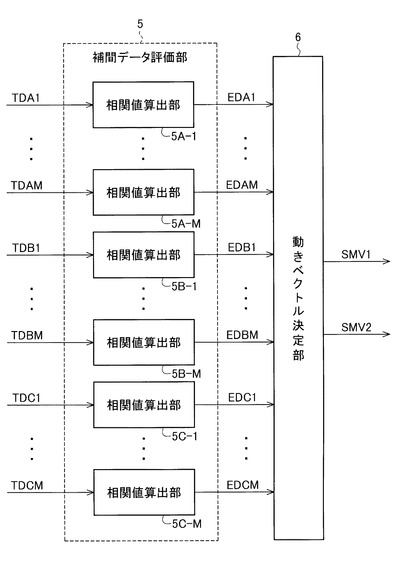
テスト補間部4は、複数の、即ち第1乃至第Mのテスト補間データ生成部4−1〜4−Mを備え、補間データ評価部5は、第1群の第1乃至第Mの相関値算出部5A−1〜5A−Mと、第2群の第1乃至第Mの相関値算出部5B−1〜5B−Mと、第3群の第1乃至第Mの相関値算出部5C−1〜5C−Mを備える。
【0038】
テスト補間データ生成部4−1〜4−Mは、現縮小フレームSF0のブロックのデータF0B1〜F0BMと、それぞれこれらと対をなす第2の縮小遅延フレームSF2のブロックのデータF2B1〜F2BMを画素ごとに平均することで得られる平均値から成るデータを第1群のテスト補間データTDA1〜TDAMとして算出する。テスト補間データ生成部4−1〜4−Mで、平均を求めるのに用いられるデータは、互いに異なる位置にあるブロックのデータである。
テスト補間部4また、上記のように、現縮小フレームSF0のブロックのデータF0B1〜F0BMを第2群のテスト補間データTDB1〜TDBMとして、第2の縮小遅延フレームSF2のブロックのデータF2B1〜F2BMを第3群のテスト補間データTDC1〜TDCMとして出力する。図1には、テスト補間データTDA1〜TDCMの集合が符号TDで表されている。
【0039】
以下、より詳しく説明する。
現縮小フレームSF0の第1のブロックデータF0B1と第2の縮小遅延フレームSF2の第1のブロックデータF2B1がテスト補間データ生成部4−1に入力される。
【0040】
テスト補間データ生成部4−1は、現縮小フレームSF0の第1のブロックデータF0B1と第2の縮小遅延フレームSF2の第1のブロックデータF2B1の画素ごとの平均値を第1群の第1のテスト補間データTDA1として相関値算出部5A−1に出力する。ここで画素ごとの平均値とは、現縮小フレームSF0内のブロックにおける各画素と、第2の縮小遅延フレームSF2内のブロックにおける対応する位置の画素の画素値(例えばそれぞれのブロックの基準位置、例えば左上隅を原点として同じ座標値で表される画素の画素値)の平均値を意味する。
【0041】
同様に、現縮小フレームSF0の第2のブロックデータF0B2と第2の縮小遅延フレームSF2の第2のブロックデータF2B2がテスト補間データ生成部4−2に入力される。テスト補間データ生成部4−2は、現縮小フレームSF0の第2のブロックデータF0B2と第2の縮小遅延フレームSF2の第2のブロックデータF2B2の画素ごとの平均値を第1群の第2のテスト補間データTDA2として相関値算出部5A−2(図示しない)に出力する。
【0042】
テスト補間データ生成部4−3(図示しない)〜4−Mも同様に現縮小フレームSF0の第3のブロックデータF0B3乃至第MのブロックデータF0BMと第2の縮小遅延フレームSF2の第3のブロックデータF2B3乃至第MのブロックデータF2BMに基づいて第1群の第3のテスト補間データTDA3乃至第Mのテスト補間データTDAMを生成し、相関値算出部5A−3(図示しない)〜5A−Mに出力する。
【0043】
一般化して言えば、テスト補間データ生成部4−mは、現縮小フレームSF0の第mのブロックデータF0Bm(m=1〜M)と第2の縮小遅延フレームSF2の第mのブロックデータF2Bmに基づいて、例えばこれらの画素ごとの平均を求めることで、第1群の第mのテスト補間データTDmを生成し、相関値算出部5A−mに出力する。
【0044】
テスト補間部4さらに、現縮小フレームSF0のブロックのデータF0B1〜F0BMを、テスト補間データTDB1〜TDBMとして、相関値算出部5B−1〜5B−Mに出力し、第2の縮小遅延フレームSF2のブロックのデータF2B1〜F2BMを、テスト補間データTDC1〜TDCMとして相関値算出部5B−1〜5C−Mに出力する。
一般化して言えば、テスト補間部4は、現縮小フレームSF0の第mのブロックのデータF0Bmを、第2群の第mのテスト補間データTDBmとして相関値算出部5B−mに出力し、第2の縮小遅延フレームSF2の第mのブロックのデータF2Bmを、第3群の第mのテスト補間データTDCmとして相関値算出部5C−mに出力する。
【0045】
第1の縮小遅延フレームSF1の処理対象ブロックF1Baのデータが補間データ評価部5内の相関値算出部5A−1〜5C−Mに入力される。
【0046】
相関値算出部5A−1〜5C−Mは、それぞれテスト補間部4から出力されるテスト補間データTDA1〜TDCMと第1の縮小遅延フレームSF1の処理対象ブロックF1Baのデータの相関値、例えば差分絶対値和を算出し、評価データEDA1〜EDCMとして出力する。
【0047】
相関値算出部5A−1は、第1群の第1のテスト補間データTDA1の各画素のデータと第1の縮小遅延フレームSF1の処理対象ブロックF1Baの各画素のデータの差分絶対値の和を算出し、評価データEDA1として動きベクトル決定部6に出力する。差分絶対値和は下記の式(1)により表される。
【0048】
【数1】

【0049】
ここで、BK1、BK2はブロック内の各画素のデータであり、BK1をテスト補間データTDA1を構成する各画素のデータ、BK2を処理対象ブロックF1Ba内の各画素のデータとすると式(1)は第1群の第1のテスト補間データTDA1の各画素のデータと第1の遅延フレームF1の処理対象ブロックF1Baの各画素のデータの差分絶対値和となる。差分絶対値和SADは、相関の度合いを表すものであり、評価データEDA1として相関値算出部5A−1から出力される。
【0050】
式(1)で与えられる差分絶対値和は、その値が小さいほど、相関が強いことを意味し、差分絶対値和SADを評価データとして用いる場合、その値が小さいほど、評価が高いことを表す。
【0051】
相関値算出部5A−2〜5C−Mも同様に、第1群の第2のテスト補間データTDA2乃至第3群の第Mのテスト補間データTDCMと第1の縮小遅延フレームSF1の処理対象ブロックF1Baのデータの差分絶対値和を算出し、評価データEDA2〜EDCMとして動きベクトル決定部6に出力する。
【0052】
評価データEDA1〜EDCMのうち、第1群のテスト補間データTDA1〜TDAMに対応するものを第1群の評価データEDA1〜EDAMと言い、第2群のテスト補間データTDB1〜TDBMに対応するものを第2群の評価データEDB1〜EDBMと言い、第3群のテスト補間データTDC1〜TDCMに対応するものを第3群の評価データEDC1〜EDCMと言う。
【0053】
動きベクトル決定部6は、評価データEDA1〜EDCMのうちの値が最小のもの(最も高い評価を示すもの)を見つける。
【0054】
評価データEDA1〜EDCMのうち値が最小のものが第1群の評価データEDA1〜EDAMのいずれかである場合には、動きベクトル決定部6は、第1の縮小遅延フレームSF1の処理対象ブロックF1Baの位置に対する、当該最小値の評価データに対応する、第2の縮小遅延フレームSF2内のブロックの相対位置(位置の差)を第1の縮小動きベクトルSMV1として出力し、第1の縮小遅延フレームSF1の処理対象ブロックF1Baの位置に対する、当該最小値の評価データに対応する、現縮小フレームSF0内のブロックの相対位置(位置の差)を第2の縮小動きベクトルSMV2として出力する。なお、同じ評価データに対応する第2の縮小遅延フレームSF2内のブロックと現縮小フレームSF0内のブロックとは、処理対象ブロックF1Baを中心として点対称の位置にあるので、SMV2=−SMV1の関係がある。
【0055】
評価データEDA1〜EDCMのうち値が最小のものが第2群の評価データEDB1〜EDBMのいずれかである場合には、動きベクトル決定部6は、第1の縮小遅延フレームSF1の処理対象ブロックF1Baの位置に対する、当該最小値の評価データに対応する、現縮小フレームSF0内のブロックの相対位置(位置の差)を第2の縮小動きベクトルSMV2として出力し、第1の縮小動きベクトルSMV1の代わりに対応するブロックがない(差分絶対値和が十分に小さいブロックがない)こと、即ち有効データがないことを示す信号(データ乃至フラグ)を出力する。
【0056】
評価データEDA1〜EDCMのうち値が最小のものが第3群の評価データEDB1〜EDCMのいずれかである場合には、動きベクトル決定部6は、第1の縮小遅延フレームSF1の処理対象ブロックF1Baの位置に対する、当該最小値の評価データに対応する、第2の縮小遅延フレームSF1内のブロックの相対位置(位置の差)を第1の縮小動きベクトルSMV1として出力し、第2の縮小動きベクトルSMV2の代わりに対応するブロックがない(差分絶対値和が十分に小さいブロックがない)こと、即ち有効データがないことを示す信号を出力する。
【0057】
動きベクトル拡大部7は、下記の式(2A)及び式(2B)により縮小動きベクトルSMV1及びSMV2を拡大して、動きベクトルMV1及びMV2を出力する。ここで、縮小動きベクトルSMV1及びSMV2は縮小画像における値であり、動きベクトルMV1及びMV2は入力画像における値である。つまり、縮小動きベクトルSMV1及びSMV2は、それぞれ第2の縮小遅延フレームSF2から第1の縮小遅延フレームSF1及び現縮小フレームSF0から第1の縮小遅延フレームSF1への動きベクトルであり、動きベクトルMV1及びMV2はそれぞれ第2の遅延フレームF2から第1の遅延フレームF1、及び現フレームF0から第1の遅延フレームF1への動きベクトルである。
【0058】
MV1=SMV1/α …(2A)
MV2=SMV2/α …(2B)
【0059】
ただし、縮小動きベクトルSMV1の代わりに対応ブロックなしを示す信号が出力されている場合、動きベクトルMV1の代わりに対応ブロックなしを示す信号を出力し、縮小動きベクトルSMV2の代わりに対応ブロックなしを示す信号が出力されている場合、動きベクトルMV2の代わりに対応ブロックなしを示す信号を出力する。
【0060】
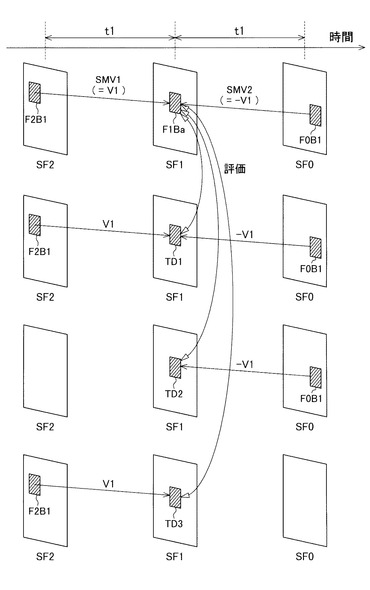
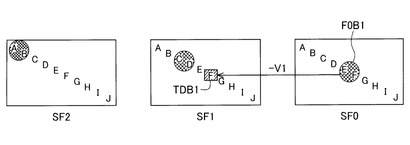
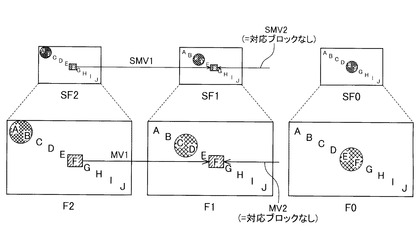
図4は、動きベクトル検出部12の動作を説明するための図である。ここでは、M=1の場合について説明する。
第1の縮小遅延フレームSF1の一部の領域が第1の縮小遅延フレームSF1の処理対象ブロックF1Baとして切り出されている。
【0061】
第1の縮小遅延フレームSF1の処理対象ブロックF1Baに対してベクトル−V1ずらした位置に対応する領域が第2の縮小遅延フレームSF2の第1のブロックデータF2B1として設定されて切り出され、ベクトル+Vずらした位置に対応する領域が現縮小フレームSF0の第1のブロックデータF0B1として設定されて切り出される。
【0062】
テスト補間データ生成部4−1は、現縮小フレームSF0の第1のブロックデータF0B1と第2の縮小遅延フレームSF2の第1のブロックデータF2B1を画素ごとに平均してテスト補間データTDA1を生成する。
さらに、テスト補間部4は、現縮小フレームSF0の第1のブロックデータF0B1をテスト補間データTDB1として、第2の縮小遅延フレームSF2の第1のブロックデータF2B1をテスト補間データTDC1として出力する。
【0063】
相関値算出部5A−1は、テスト補間データTDA1と第1の縮小遅延フレームSF1の処理対象ブロックF1Baのデータから上記の式(1)を使って差分絶対値和SADを算出し、評価データEDA1として出力する。
【0064】
相関値算出部5B−1も同様に、テスト補間データTDB1と第1の縮小遅延フレームSF1の処理対象ブロックF1Baのデータから上記の式(1)を使って差分絶対値和SADを算出し、評価データEDB1として出力する。
相関値算出部5C−1も同様に、テスト補間データTDC1と第1の縮小遅延フレームSF1の処理対象ブロックF1Baのデータから上記の式(1)を使って差分絶対値和SADを算出し、評価データEDC1として出力する。
【0065】
動きベクトル決定部6は、評価データEDA1、EDB1、EDC1のうち最小の値を生じさせたブロック又はブロック対と第1の縮小遅延フレームSF1内の処理対象ブロックF1Baの相対位置に基づいて縮小動きベクトルを求める。
【0066】
評価データEDA1が最小値である場合には、第1の縮小遅延フレームSF1内の処理対象ブロックF1Baに対する第2の縮小フレームSF2内のブロックの相対位置を第1の縮小動きベクトルSMV1(=V1)として出力し、第1の縮小遅延フレームSF1内の処理対象ブロックF1Baに対する現縮小フレームSF0内のブロックの相対位置を第2の縮小動きベクトルSMV2(=−V1)として出力する。
【0067】
評価データEDB1が最小値である場合、第1の縮小動きベクトルSMV1の代わりに、対応ブロックなしを示す信号が出力され、第1の縮小遅延フレームSF1内の処理対象ブロックF1Baに対する現縮小フレームSF0内のブロックの相対位置が第2の縮小動きベクトルSMV2(=−V1)として出力される。
【0068】
評価データEDC1が最小値である場合、第1の縮小遅延フレームSF1内の処理対象ブロックF1Baに対する第2の縮小遅延フレームSF2内のブロックの相対位置が第1の縮小動きベクトルSMV1(=V1)として出力され、第2の縮小動きベクトルSMV2の代わりに対応ブロックなしを示す信号が出力される。
【0069】
図4では、M=1の場合について説明したが、本発明に係る実施の形態の構成はM=1に限定されない。即ち、候補としてのベクトルに対応するブロック対を2個以上設定しても良い。例えば、第1の縮小遅延フレーム内の処理対象ブロックF1Baに対して、所定の動き量に対応する探索範囲内に位置する第2の縮小遅延フレーム内のすべてのブロック及びこれと点対称位置にある現縮小フレーム内のブロックから成るブロック対について平均値の算出によるテスト補間データの生成を行うこととしても良い。
【0070】
動きベクトル検出部12では、上記のように実在のデータである第1の縮小遅延フレームSF1内のデータを用いて第1の縮小遅延フレームSF2内のブロック及び現縮小フレームSF0内のブロックから成るブロック対に対応するベクトルの候補を評価することにより動きベクトルを決定しているので第2の縮小遅延フレームSF1及び現縮小フレームSF0から第1の縮小遅延フレームSF1への動きベクトルを精度良く算出することができる。
さらに、第2の縮小遅延フレームSF2内のデータのみ、或いは現縮小フレームSF0内のデータのみを、ベクトル候補に対応するテスト補間データとして用いているので、第2の縮小遅延フレームから現縮小フレームの間で物体が隠れたり、出現したりしても動きベクトルを精度良く算出することができる。
【0071】
なお、補間データ評価部5では差分絶対値和を用いて評価データを算出したが、相関を求める関数は自乗誤差和など他にも多数あり、これに置き換えることも可能である。即ち、補間データ評価部5は、テスト補間データと、処理対象ブロックのデータとの相関を求めるものであれば良く、該相関を示す指標(相関値)は、差分絶対値和以外のものであっても良い。
【0072】
また、動きベクトル決定部6では、テスト補間データTDA1〜TDCM相互間に異なる重みをつけることで、いずれかのテスト補間データに対応するベクトル候補が、求める動きベクトルであると判定される可能性を高めるようにしても良い。
例えば、相関値算出部5B−1〜5C−Mで求めた差分絶対値和にある係数β1を乗算したものを評価データEDB1〜EDCMとして出力し、相関値算出部5A−1〜5A−Mで求めた差分絶対値和に対して上記の係数β1より小さい係数β2を乗算したものを評価データEDA1〜EDAMとして出力し、動きベクトル決定部6で、これらの評価データEDA1〜EDCMのうちの値が最小のものを見つけるようにしても良い。こうすれば、テスト補間データTDA1〜TDAMに対応するブロック対が求める動きベクトルに対応するものと判断される可能性を高めることができる。言い換えれば、テスト補間データTDA1〜TDAMに対応するブロック対に対応するベクトルを優先的に動きベクトルとして選択することができる。
【0073】
逆に、相関値算出部5B−1〜5C−Mで求めた差分絶対値和にある係数β1を乗算したものを評価データEDB1〜EDCMとして出力し、相関値算出部5A−1〜5A−Mで求めた差分絶対値和に対して上記の係数β1より大きい係数β2を乗算したものを評価データEDA1〜EDAMとして出力し、動きベクトル決定部6で、これらの評価データEDA1〜EDCMのうちの値が最小のものを見つけるようにしても良い。こうすれば、テスト補間データTDB1〜TDCMに対応するブロックが、求める動きベクトルに対応するものと判断される可能性を高めることができる。言い換えれば、テスト補間データTDB1〜TDCMに対応するブロックに対応するベクトルを優先的に動きベクトルとして選択することができる。
【0074】
なお、このような重み付けに加えて、他の要因による重み付けを加えても良い。
例えば、第2の縮小遅延フレームSF2及び現縮小フレームSF0内のブロックのうち、第1の縮小遅延フレームSF1内の処理対象ブロックF1Baの位置に近いブロック又はブロック対(対応するベクトルの絶対値が小さいブロック)について求められる差分絶対値和に対してより小さな係数を乗算することで、より近いブロック又はブロック対が、求める動きベクトルに対応するものと判断される可能性を高めることとしても良い。
要するに、評価データは、差分絶対値和、或いは他の相関値に基づいて定められるものであれば良い。
【0075】
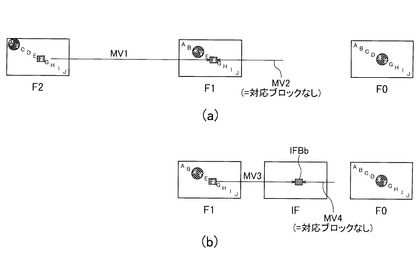
次に、図5〜図7を参照して、動きベクトル変換部13及び補間フレーム生成部14の動作についてより詳細に説明する。
【0076】
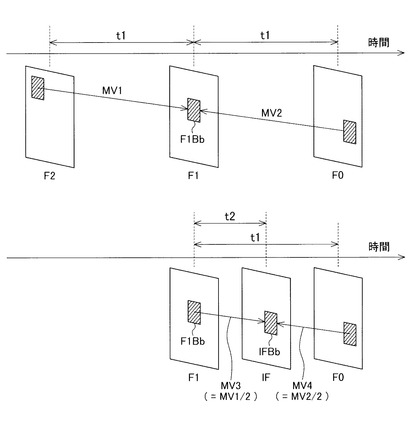
動きベクトル変換部13は、第2の遅延フレームF2から第1の遅延フレームF1への第1の動きベクトルMV1及び現フレームF0から第1の遅延フレームF1への第2の動きベクトルMV2を、第1の遅延フレームF1から補間フレームIFへの第3の動きベクトルMV3と、現フレームF0から補間フレームIFへの第4の動きベクトルMV4に変換する。
【0077】
図5〜図7に示すように入力フレームの時間間隔をt1、第1の遅延フレームF1から補間フレームIFへの時間間隔をt2とした時、下記の式(3A)及び式(3B)により動きベクトルMV3及びMV4を算出する。たとえば、60Hzの入力画像信号から120Hzの画像信号に変換する場合、t1は1/60秒、t2は1/120秒となる。
【0078】
MV3=MV1×t2/t1 …(3A)
MV4=MV2×(t1−t2)/t1 …(3B)
【0079】
ただし、動きベクトルMV1の代わりに対応ブロックなしを示す信号が出力されている場合、動きベクトルMV3の代わりに対応ブロックなしを示す信号を出力し、動きベクトルMV2の代わりに対応ブロックなしを示す信号が出力されている場合、動きベクトルMV4の代わりに対応ブロックなしを示す信号を出力する。
【0080】
このようにして第3及び第4の動きベクトルMV3及びMV4を求めたら、図5〜図7に示すように補間フレームIFからベクトル−MV3の位置の、縮小前の第1の遅延フレームF1のデータ(処理対象ブロックF1Baに対応するブロックF1Bb内のデータ)と補間フレームIFからベクトル−MV4の位置の、縮小前の現フレームF0のデータ(ブロックF1Bbと同じ大きさのブロックのデータ)の双方又は一方に基づいて補間フレームIFのデータ(ブロックF1Bbと同じ大きさのブロックIFBbのデータ)を求める。
【0081】
例えば、図5に示すように、第3及び第4の動きベクトルMV3及びMV4の双方とも、有効なデータである場合(「対応ブロックなし」ではない場合)には、上記の第1の遅延フレームF1内のデータ及び現フレームF0内のデータの平均を補間フレームIFのデータとして算出する。生成したデータから成る補間フレームIFのデータを第1の遅延フレームF1のデータと現フレームF0のデータ間に配置して出力する。
このとき、補間に用いられる第1の遅延フレームF1のブロックデータ(第1の縮小遅延フレームSF1の処理対象ブロックF1Baに対応するブロックF1Bbのデータ)と、現フレームF0のブロックデータ(現縮小フレームSF0のブロックF0B1に対応するブロック)とは、補間フレームIF内の補間により得られるデータの位置を中心として、互いに対称の位置にある。
【0082】
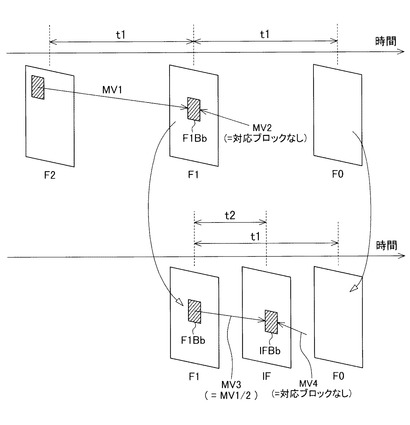
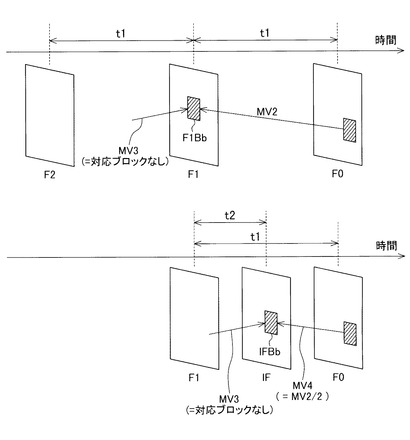
図6又は図7に示すように、第3及び第4の動きベクトルMV3及びMV4の一方の代わりに「対応ブロックなし」の信号が出力されている場合には、他方の動きベクトル(第3及び第4の動きベクトルMV3及びMV4のうちの有効なベクトル)に対応する第1の遅延フレームF1内のデータ又は現フレームF0内のデータを、補間フレームIFのデータ(ブロックF1Bbと同じ大きさのブロックIFBbのデータ)として出力する。図6は、第4の動きベクトルMV4の代わりに「対応ブロックなし」の信号が出力されている場合を示し、図7は、第3の動きベクトルMV3の代わりに「対応ブロックなし」の信号が出力されている場合を示す。このように一方のフレーム内のデータをそのまま補間フレームのデータとして出力する処理は「零次補間」と呼ばれる。
補間フレーム生成部14は、このようにして得られたデータから成る補間フレームIFのデータを第1の遅延フレームF1のデータと現フレームF0のデータ間に配置して出力する。
【0083】
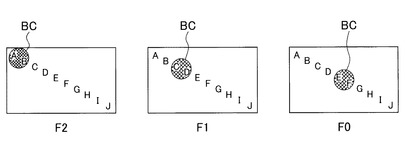
図8は、動きベクトル検出部12に入力される現フレームF0のデータ、第1の遅延フレームF1のデータ、第2のフレームF2のデータの対応関係を説明するための図である。図8に示すような映像を表す信号が入力された場合の本実施の形態1の動作を説明する。図8に示す映像においては、クロスハッチングで示す丸BCが時間とともに画面の左上から右下へ移動しており、その背後にある英文字(移動なし)が隠れたり見えたりしている。
【0084】
図9は図8に示す入力画像を縮小した画像データを示す図である。但し、図9でも画像は図8と同じ大きさに描いてある。図8の画像の要素(丸BC及びA〜Jを示す文字は、図9でもそのまま現れており、従って、英文字A〜Jが丸BCの陰に隠れたり、見えたりしている。
図10〜図16はテスト補間部4及び補間データ評価部5の動作を説明するための図である。図17は動きベクトル拡大部7の動作を説明するための図である。
【0085】
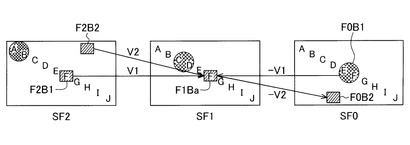
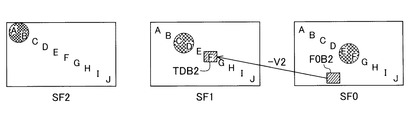
図9に示すような第2の縮小遅延フレームSF2のデータ、第1の縮小遅延フレームSF1のデータ、現縮小フレームSF0のデータを入力とした場合の動きベクトル検出部12の動作を説明する。なお、ここではM=2を想定している。
【0086】
テスト補間部4では、動きベクトルの候補ごとにテスト補間データを生成する。
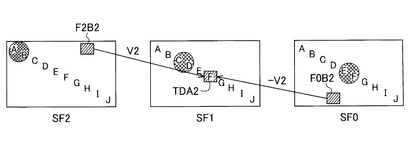
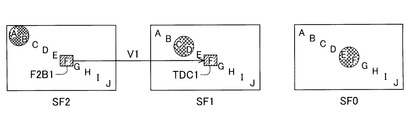
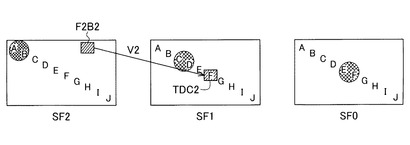
例えば、図10に示すように第1の縮小遅延フレームSF1の一部の領域を第1の縮小遅延フレームSF1の処理対象ブロックF1Baとし、第1の縮小遅延フレームSF1の処理対象ブロックF1Baから−V1ずらした位置の第2の縮小遅延フレームSF2のブロックを第1のブロックF2B1とし、第1の縮小遅延フレームSF1の処理対象ブロックF1BaからV1ずらした位置の現縮小フレームSF0のブロックをブロックF0B1とする。
また、第1の縮小遅延フレームSF1の処理対象ブロックF1Baから−V2ずらした位置の第2の縮小遅延フレームSF2のブロックをブロックF2B2とし、第1の縮小遅延フレームSF1の処理対象ブロックF1BaからV2ずらした位置の現縮小フレームSF0のブロックをブロックF0B2とする。
【0087】
図11に示すように、ブロックF2B1のデータとブロックF0B1のデータから得られる画素ごとの平均をテスト補間データTDA1として生成する。
同様に、図12に示すようにブロックF2B2のデータとブロックF0B2のデータから画素ごとの平均をテスト補間データTDA2として生成する。
さらに、図13及び図14に示すように、ブロックF0B1、F0B2のデータをそれぞれテスト補間データTDB1、TDB2として出力する。
同様に、図15及び図16に示すように、ブロックF2B1、F2B2のデータをそれぞれテスト補間データTDC1、TDC2として出力する。
【0088】
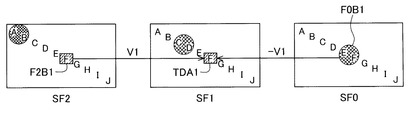
補間データ評価部5では、図11〜図16に示されるテスト補間データTDA1〜TD6の各々と処理対象ブロックF1Baのデータとの差分絶対値和を算出し、評価データEDA1〜ED6を出力する。図9〜図16の具体例では、第1の縮小遅延フレームSF1上の文字「F」を表す領域が処理対象ブロックF1Baとなっており、この文字「F」が、第2の縮小遅延フレームSF2および第1の縮小遅延フレームSF1では見えているが、現縮小フレームF0ではハッチングで示す丸BCの陰に隠れており、従って、第2の縮小遅延フレームSF2内の文字「F」を表す領域から成るブロックF2B1から得られたテスト補間データTD5と、処理対象ブロックF1Baとの差分絶対値和、即ち評価データED5が最小となる。
【0089】
動きベクトル決定部6では、評価データEDA1〜ED6のうち一番小さい評価データED5に対応した縮小動きベクトルSMV1(=V1)を出力し、縮小動きベクトルSMV2の代わりに対応ブロックなしを示す信号を出力する。
【0090】
動きベクトル拡大部7では、縮小動きベクトルSMV1とSMV2に対して上記の式(2A)及び式(2B)を用いて、第2の遅延フレームF2から第1の遅延フレームF1への動きベクトルMV1と現フレームF0から第1の遅延フレームF1への動きベクトルMV2を出力する(図17)。
先にも述べたように、縮小動きベクトルの一方の代わりに対応ブロックなしを示す信号が出力されている場合には、当該縮小動きベクトルに対応する動きベクトル(MV1又はMV2)に対しても、代わりに「対応ブロックなし」を示す信号が出力されるので、図9〜図16の例では、動きベクトルMV1(=V1/α)が出力されるとともに、MV2の代わりに対応ブロックなしを示す信号が出力される。
【0091】
第1の遅延フレームF1を縮小した第1の縮小遅延フレームSF1についてもれなく(隙間なく)ブロックを設定し縮小動きベクトルを算出することで第1の縮小遅延フレームSF1のすべての部分について第1及び第2の縮小動きベクトルSMV1及び/又はSMV2を、生成し、第1及び第2の縮小動きベクトルSMV1、SMV2を拡大することで、第1及び第2の動きベクトルMV1及び/又はMV2を得て、上記第1の縮小遅延フレームSF1内の上記の画素に対応する第1の遅延フレームF1内の画素に対応する位置、例えば同じ位置にある、補間フレームIF内の画素について、第1及び第2の動きベクトルMV1及びMV2を用いた変換を行うことで、第3及び第4の動きベクトルMV3及びMV4を求めることとしても良い。
【0092】
代わりに、第1の遅延フレームF1を縮小した第1の縮小遅延フレームSF1内の各画素を中心とする所定の大きさのブロックについて、上記の処理を行うことで、当該画素についての第1の縮小動きベクトルSMV1及び第2の縮小動きベクトルSMV2を生成し、第1及び第2の縮小動きベクトルSMV1、SMV2を拡大することで、第1及び第2の動きベクトルMV1及び/又はMV2を得て、上記第1の縮小遅延フレームSF1内の上記の画素に対応する第1の遅延フレームF1内の画素に対応する位置、例えば同じ位置にある、補間フレームIF内の画素について、第1及び第2の動きベクトルMV1及びMV2を用いた変換を行うことで、第3及び第4の動きベクトルMV3及びMV4を求めることとしても良い。
【0093】
図18(a)及び(b)は、動きベクトル変換部13の動作の具体例を説明するための図である。図18(a)は動きベクトル変換部13の入力、図18(b)は動きベクトル変換部13の出力を示す。
【0094】
動きベクトル変換部13は、図18(a)に示される、第2の遅延フレームF2から第1の遅延フレームF1への第1の動きベクトルMV1と、現フレームF0から第1の遅延フレームF1への動きベクトルMV2に対して上記の式(3A)及び式(3B)を用いて、図18(b)に示される、第1の遅延フレームF1から補間フレームIFへの第3の動きベクトルMV3と現フレームF0から補間フレームIFへの第4の動きベクトルMV4に変換する。図18(a)及び(b)に示す具体例では、MV1はV1/α、MV2の代わりに対応ブロックなしを示す信号が出力されており、t1は1/60秒、t2はt1の1/2に等しく1/120秒であり、上記の式(3A)及び式(3B)よりMV3はV1/2α、MV4の代わりに対応ブロックなしを示す信号が出力される。
【0095】
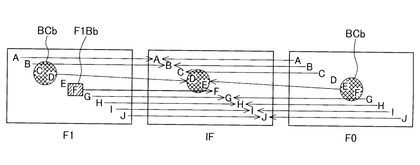
図19は、補間フレーム生成部14の動作の具体例を説明するための図である。図19は、図8〜図16と同様に、第1の遅延フレームF1上の文字「F」を表す領域が処理対象ブロックF1Baに対応するブロック(非縮小ブロック)F1Bbとなっており、この文字「F」が、第2の遅延フレームF2および第1の遅延フレームF1では見えているが、現フレームF0ではクロスハッチングで示す丸BCの陰に隠れており、従って、第2の遅延フレームF2内の文字「F」を表す領域から成るブロックF2B1から得られたテスト補間データTD5と、処理対象ブロックF1Baとの差分絶対値和、即ち評価データED5が最小となる場合を示している。この場合、図19に示すように補間フレームIFから−MV3動かした位置の第1の遅延フレームF1のデータを補間フレームIFのデータとして出力する。
このような処理を、補間フレームIF内のすべてのブロックに対して行うことで生成した補間フレームIFを第1の遅延フレームF1と現フレームF0の間に内挿して出力する。
【0096】
以上より、本実施の形態では、動きベクトルの評価を行うことにより動きベクトルが精度良く検出され、画像の乱れなく補間フレームを内挿することができる。さらに補間するフレーム前後で物体が隠れたり出現したりする場合でも、画像の乱れなく補間フレームを内挿することができる。
【0097】
ここで現フレーム画像縮小部21、第1の遅延フレーム画像縮小部22、第2の遅延フレーム画像縮小部23にて画像縮小処理をした場合と画像縮小処理をしない場合を比較する。画像縮小部21、22、23による画像縮小処理をしない場合、動きベクトル検出部12では入力画像データがそのまま処理され、画像縮小部21、22、23による画像縮小処理をする場合、動きベクトル検出部12には縮小画像データが処理される。この時、動きベクトルの探索に当たり、同じ大きさのベクトルの範囲を探索するとした場合、縮小画像を使用した方が広い範囲を探索することができ、従って、大きい動きを検出することができる。
また、縮小画像を用いる場合には、各ブロックに含まれる画素の数が、非縮小画像の各ブロックに含まれる画素の数よりも少なく、各ブロックについての差分絶対値和の計算において計算に用いられる画素の数が少ないので、演算量が減少して、応答性が向上するとともに、回路規模を小さくすることができる。
【0098】
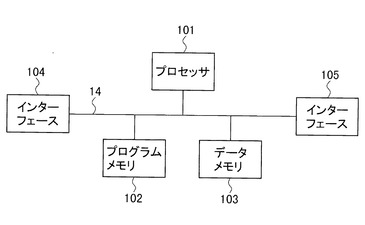
以上、本発明をハードウェアで実現する場合について説明したが、図1に示される構成の一部又は全部をソフトウエアにより実現することも可能である。その場合の処理を図20及び図21を参照して説明する。
【0099】
図20は、図1に示される構成のうち、フレームメモリ11、動きベクトル検出部12、動きベクトル変換部13及び補間フレーム生成部14による処理をソフトウェアで実現するための、コンピュータシステムで構成された画像処理装置を示す。図示の画像処理装置は、プロセッサ101と、プログラムメモリ102と、データメモリ103と、入力インターフェース104と、出力インターフェース105と、これらを接続するバス106を有する。
【0100】
プロセッサ101は、プログラムメモリ102に記憶されたプログラムに従って動作し、入力インターフェース104を介して入力される画像に対する処理を行う。動作の過程で種々のデータをデータメモリ103に記憶させる。処理の結果生成される画像は、インターフェース105を介して図1に示す画像表示部15に供給され、画像表示部15による表示に用いられる。
以下、プロセッサ101により行なわれる処理を図21を参照して説明する。
【0101】
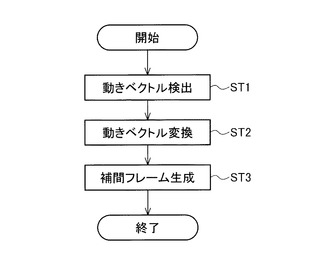
図21は、図20の画像処理装置で実施される画像処理方法のフローを示す。
【0102】
まず、動きベクトル検出ステップST1では、画像データF0と、画像データF0に対して1フレーム遅延した画像データF1と、画像データF0に対して2フレーム分遅延した画像データF2を参照して第2の遅延フレームF2から第1の遅延フレームF1への第1の動きベクトルMV1、及び現フレームF0から第1の遅延フレームF1への第2の動きベクトルV2を生成する。この動作は、図1の動きベクトル検出部12と同等である。
【0103】
動きベクトル変換ステップST2では、第1及び第2の動きベクトルMV1及びMV2を、第1の遅延フレームF1から補間フレームIF(現フレームF0と第1の遅延フレームF1の間に挿入される)への第3の動きベクトルMV3と、現フレームF0から補間フレームIFへの第4の動きベクトルMV4に変換する。この動作は、図1の動きベクトル変換部13と同等である。
【0104】
補間フレーム生成ステップST3では、第1の遅延フレームF1のデータ、現フレームF0のデータ、第3の動きベクトルMV3及び第4の動きベクトルMV4から補間フレームIFのデータを生成する。補間フレームIFのすべてのブロックについて上記の処理が繰り返され、これにより生成された補間フレームIFのデータを現フレームF0のデータと第1の遅延フレームF1のデータの間に挿入した画像データDOを生成する。この動作は、図1の補間フレーム生成部14と同等である。
【0105】
図21は、本実施の形態に係る画像表示装置の一部をソフトウェアとして実現したものであり、その効果は、図1の場合と同様である。
【符号の説明】
【0106】
2 画像縮小部、 3 ブロック切り出し部、 4 テスト補間部、 5 補間データ評価部、 6 動きベクトル決定部、 7 動きベクトル拡大部、 10 画像処理装置、 11 フレームメモリ、 12 動きベクトル検出部、 13 動きベクトル変換部、 14 補間フレーム生成部、 15 画像表示部、 21 現フレーム画像縮小部、 22 第1の遅延フレーム画像縮小部、 23 第2の遅延フレーム画像縮小部、 31 現フレームブロック切り出し部、 32 第2の遅延フレームブロック切り出し部、 33 第1の遅延フレームブロック切り出し部。
【技術分野】
【0001】
本発明は、画像処理装置及び方法、並びに画像表示装置及び方法に関する。本発明は特に、画像のフレーム間に新たな補間フレームを挿入するフレーム補間処理に関するものである。
【背景技術】
【0002】
液晶ディスプレイなどのホールド型ディスプレイは、1フレーム期間同じ画像を表示し続けており、画像中の物体が動いた場合に、動く物体に対する人間の目の追従が連続的に移動するのに対して、物体の移動が1フレーム単位の不連続な移動を行っているためにエッジ部分がぼやけて見える問題がある。これに対し、フレームを補間することで表示フレーム数を多くして物体の移動をスムーズにすることが考えられる。
【0003】
また、映画などのフィルム映像がテレビ信号に変換された素材については、両者(フィルム映像とテレビ信号)のフレーム周波数の違いから、2フレーム又は3フレームが同じフレームから作られた画像信号となっており、そのまま表示すると、動きがぼやけたり、動きがギクシャクしたジャダーが発生したりする問題がある。
【0004】
また、同様にコンピュータ処理された映像がテレビ信号に変換された素材についても、2フレームが同じフレームから作られた画像信号であり、そのまま表示すると同様にジャダーが発生する問題がある。
【0005】
従来の画像処理装置及び方法は、補間フレームに対して1フレーム前のフレームと同じ画像で補間する零次ホールド法か、補間フレームに対して1フレーム前の画像と1フレーム後の画像の平均画像で補間する平均値補間法などがあるが、零次ホールド法は、一定方向に動く画像に対して、滑らかな移動をしないので、依然ホールド型ディスプレイのぼやけの問題は解決されない。また、平均値補間法は、動いた画像が2重像になる問題がある。
【0006】
この改善策として、補間フレームの補間画素に対して点対称の位置にある時間的に前のフレーム上の画素と時間的に後のフレーム上の画素との画素間の相関が最も大きい画素から補間フレームの補間画素を生成するものがある(例えば、特許文献1参照)。この方法では、画素単位での相関検出のため、画像の内容が異なるにも拘らず、画素間の相関が大きいと検出される場合があり、正しく補間フレームが生成できない場合がある。
【先行技術文献】
【特許文献】
【0007】
【特許文献1】特開2006−129181号公報(第8頁、第3図)
【発明の概要】
【発明が解決しようとする課題】
【0008】
従来のフレーム補間処理は、上記の様に構成されており、動きがぼやけたり、動きがギクシャクしたジャダーが発生したりする問題がある。また、画素単位の相関を検出する方法では、正しく相関検出ができないために正しく補間フレームが生成できず、特に補間するフレーム前後で物体が隠れたり出現したりする場合、補間フレームが著しく乱れるという問題、及びフレーム補間処理は演算量が多い(ハードウェアでは回路規模が大きい)という問題がある。
【課題を解決するための手段】
【0009】
本発明の画像処理装置は、
画像の現フレームと前記現フレームの1フレーム前のフレームである第1の遅延フレームとの間に補間フレームを挿入する画像処理装置において、
前記第1の遅延フレームのデータ及び前記現フレームの2フレーム前のフレームである第2の遅延フレームのデータを参照して前記第2の遅延フレームから前記第1の遅延フレームへの第1の動きベクトルを算出し、
前記現フレームのデータ及び前記第1の遅延フレームのデータを参照して前記現フレームから前記第1の遅延フレームへの第2の動きベクトルを算出する動きベクトル検出部と、
前記第1の動きベクトルを前記第1の遅延フレームから前記補間フレームへの第3の動きベクトルに変換し、
前記第2の動きベクトルを前記現フレームから前記補間フレームへの第4の動きベクトルに変換する動きベクトル変換部と、
前記第3の動きベクトル、前記第4の動きベクトル、前記第1の遅延フレームのデータ、及び前記現フレームのデータから、前記補間フレームのデータを生成し、前記補間フレームのデータを前記現フレームのデータと前記第1の遅延フレームのデータの間に挿入した画像データを出力する補間フレーム生成部とを有し、
前記動きベクトル検出部は、
前記現フレームを縮小して現縮小フレームを出力し、前記第1の遅延フレームを縮小して第1の縮小遅延フレームを出力し、前記第2の遅延フレームを縮小して第2の縮小遅延フレームを出力する画像縮小部と、
前記補間フレームの補間対象ブロックに対応する、前記第1の縮小遅延フレーム内のブロックを処理対象ブロックとして設定し、
前記第2の縮小遅延フレームの一部をなすブロックのデータ及び前記現縮小フレームの一部をなすブロックのデータの画素ごとの平均値で構成される第1群のテスト補間データと、
前記現フレームの一部をなすブロックのデータで構成される第2群のテスト補間データと、
前記第2の縮小遅延フレームのブロックデータ構成される第3群のテスト補間データと
を含む複数のテスト補間データを出力するテスト補間部と、
前記第1乃至第3群のテスト補間データのうち、前記処理対象ブロックのデータに対する前記各テスト補間データの相関の強さを評価し、該評価の結果を示す複数の評価データを出力する補間データ評価部と、
前記複数の評価データのうち最も相関の強いことを示す前記評価データを生じさせた前記テスト補間データに対応する動きベクトルを第1の縮小動きベクトル及び第2の縮小動きベクトルの少なくとも一方として出力する動きベクトル決定部と、
前記第1の縮小動きベクトル及び第2の縮小動きベクトルの少なくとも一方を拡大して前記第1及び第2の動きベクトルの少なくとも一方として出力する動きベクトル拡大部とを有し、
前記第1群のテスト補間データは、複数の前記第2の縮小遅延フレームのブロックのデータ及び複数の前記現縮小フレームのブロックから得られ、
前記第2群のテスト補間データは、複数の前記現縮小フレームのブロックから得られ、
前記第3群のテスト補間データは、複数の前記第2の縮小遅延フレームのブロックから得られる
ことを特徴とする。
【発明の効果】
【0010】
本発明によれば、時間的に連続する3枚のフレームの中心のフレームを最も確からしいものとして、時間的に前のフレーム及び後のフレームから中心のフレームへの動きベクトルを評価することで高精度な動きベクトルを算出することができるため、画像の乱れなく補間フレームを内挿することができる。さらに補間するフレーム前後で物体が隠れたり出現したりする場合でも、画像の乱れなく補間フレームを内挿することができる。また、動きベクトルの検出に縮小画像を用いることで、演算量(回路規模)を削減することができる。
【図面の簡単な説明】
【0011】
【図1】本発明の実施の形態1に係る画像表示装置の構成を示すブロック図である。
【図2】図1の動きベクトル検出部12内のテスト補間部4の具体例を示すブロック図である。
【図3】図1の動きベクトル2内の補間データ評価部5及び動きベクトル決定部6の具体例を示すブロック図である。
【図4】図1の動きベクトル検出部12の動作を説明するための図である。
【図5】図1の動きベクトル変換部13及び補間フレーム生成部14の動作を説明するための図である。
【図6】図1の動きベクトル変換部13及び補間フレーム生成部14の動作を説明するための図である。
【図7】図1の動きベクトル変換部13及び補間フレーム生成部14の動作を説明するための図である。
【図8】現フレーム、第1及び第2の遅延フレームのそれぞれにおける画像の例を示す図である。
【図9】図8に示す入力画像を縮小した画像データの具体例を示す図である。
【図10】第1の縮小遅延フレームSF1上の処理対象ブロックを中心として、点対称の位置にある第2の縮小遅延フレームSF2及び現縮小フレームSF0に位置する2対のブロックを示す図である。
【図11】図10の2対のブロックのうちの一対のデータに基づく、テスト補間データの生成を示す図である。1の動きベクトル検出部12の動作の具体例を説明するための図である。
【図12】図10の2対のブロックのうちの他の一対のデータに基づく、テスト補間データの生成を示す図である。
【図13】現縮小フレームSF0上の一つのブロックのデータに基づくテスト補間データの生成を示す図である。
【図14】現縮小フレームSF0上の他の一つのブロックのデータに基づくテスト補間データの生成を示す図である。
【図15】第2の縮小遅延フレームSF2上の一つのブロックのデータに基づくテスト補間データの生成を示す図である。
【図16】第2の縮小遅延フレームSF2上の他の一つのブロックのデータに基づくテスト補間データの生成を示す図である。
【図17】図1の動きベクトル拡大部7の動作の具体例を説明するための図である。
【図18】(a)及び(b)は、図1の動きベクトル変換部13の動作の具体例を説明するための図である。
【図19】図1の補間フレーム生成部14の動作の具体例を説明するための図である。
【図20】本発明に係る画像処理をソフトウェアで実現する場合に利用されるコンピュータシステムで構成された画像処理装置を示すブロック図である。
【図21】本実施の形態に係る画像表示装置の処理工程を示すフローチャートである。
【発明を実施するための形態】
【0012】
以下、本発明の実施の形態を図面により説明する。本発明に係る画像処理装置は、画像の現フレームと現フレームの1フレーム前のフレームとの間に新たな補間フレームを補間により生成するものであり、本発明に係る画像表示装置には、上記の画像処理装置から出力された画像データを表示する画像表示部を備えるものである。
【0013】
実施の形態1.
図1は、本発明の実施の形態1に係る画像表示装置の構成を示す図である。実施の形態1に係る画像表示装置は、画像処理装置10と、画像表示部15を備え、画像処理装置10は、フレームメモリ11と、動きベクトル検出部12と、動きベクトル変換部13と、補間フレーム生成部14と、画像表示部15を備える。
【0014】
この画像処理装置は、例えば、放送受信装置、画像記録再生装置、又はパーソナルコンピュータ(PC)などの一部を構成することができる。また、画像表示装置5は、例えば、テレビ、映像プロジェクター、又はPCなどの一部を構成することができる。
【0015】
画像データF0が、フレームメモリ11、動きベクトル検出部12、及び補間フレーム生成部14に入力される。
フレームメモリ11は、画像データF0を2フレーム分保存し、画像データF0に対して1フレーム分遅延した画像データF1と、画像データF0に対して2フレーム分遅延した画像データF2を出力する。これより画像データF0を現フレームのデータ、画像データF1を第1の遅延フレームのデータ、画像データF2を第2の遅延フレームのデータと言う。また、現フレーム、第1の遅延フレーム、第2の遅延フレームをそれぞれのフレームデータと同じ符号F0、F1、F2で表す。
【0016】
第1の遅延フレームF1のデータは動きベクトル検出部12と補間フレーム生成部14に入力され、第2の遅延フレームF2のデータは動きベクトル検出部12に入力される。
【0017】
動きベクトル検出部12は、現フレームF0のデータと、第1の遅延フレームF1のデータと、第2の遅延フレームF2のデータを参照して、第1の遅延フレームF1上の複数のブロックの各々(フレームの一部を成す、複数の画素で構成される)を順次選択し、選択されているブロックについて、第2の遅延フレームF2から第1の遅延フレームF1への第1の動きベクトルMV1及び現フレームF0から第1の遅延フレームF1への第2の動きベクトルMV2を算出して、動きベクトル変換部13に出力する。第1の遅延フレームF1上のブロックは、第1の遅延フレームF1を例えば複数の矩形の領域に分割することで得られるものである。
【0018】
動きベクトル変換部13は、第1の動きベクトルMV1と第2の動きベクトルMV2を、第1の遅延フレームF1から補間フレームIFへの第3の動きベクトルMV3と、現フレームF0から補間フレームIFへの第4の動きベクトルMV4に変換して、補間フレーム生成部14に出力する。
【0019】
補間フレーム生成部14は、第1の遅延フレームF1のデータ、現フレームF0のデータ、第3の動きベクトルMV3及び第4の動きベクトルMV4から、現フレームF0と第1の遅延フレームF1の間に位置する補間フレームIFのデータを生成し、生成した補間フレームIFのデータを現フレームF0のデータと第1の遅延フレームF1のデータの間に挿入した画像データDOを画像表示部15に出力する。
画像表示部15は、画像データDOを表示する。
【0020】
次に、動きベクトル検出部12の構成について詳細に説明する。
動きベクトル検出部12は、画像縮小部2と、ブロック切り出し部3と、テスト補間部4と、補間データ評価部5と、動きベクトル決定部6と、動きベクトル拡大部7とを有し、画像縮小部2は、現フレーム画像縮小部21と、第1の遅延フレーム画像縮小部22と、第2の遅延フレーム画像縮小部23とを有し、ブロック切り出し部3は、現フレームブロック切り出し部31と、第1の遅延フレームブロック切り出し部32と、第2の遅延フレームブロック切り出し部33とを有する。
【0021】
現フレーム画像縮小部21は、現フレームF0を縮小して現縮小フレームSF0を出力し、第1の遅延フレーム画像縮小部22は、第1の遅延フレームF1を縮小して第1の縮小遅延フレームSF1を出力し、第2の遅延フレーム画像縮小部23は、第2の遅延フレームF2を縮小して第2の縮小遅延フレームSF2を出力する。現フレーム画像縮小部21、第1の遅延フレーム画像縮小部22、及び第2の遅延フレーム画像縮小部23における縮小率は同じであり、符号αで表される。
【0022】
現フレームブロック切り出し部31、第1の遅延フレームブロック切り出し部32、及び第2の遅延フレームブロック切り出し部33は、それぞれ、現縮小フレームSF0、第1の縮小遅延フレームSF1、及び第2の縮小遅延フレームSF2を受け、それぞれ、画面の一部を成すブロックを切り出し(抽出し)、ブロック内の画素のデータ(画素値)の集合をブロックデータとして出力する。即ち、現フレームブロック切り出し部31は、現縮小フレームSF0からブロックを切り出し、第1の遅延フレームブロック切り出し部32は、第1の縮小遅延フレームSF1からブロックを切り出し、第2の遅延フレームブロック切り出し部33は、第2の縮小遅延フレームSF2からブロックを切り出す。
【0023】
各ブロックは例えば横方向X個、縦方向Y個の画素(Y個のライン)のサイズを有する矩形の領域から成る。即ち、現縮小フレームSF0から切り出されるブロックと、第1の縮小遅延フレームSF1から切り出されるブロックと、第2の縮小遅延フレームSF2から切り出されるブロックは、縦方向のサイズ(画素数)及び横方向のサイズ(画素数乃至ライン数)が互いに等しい。
【0024】
以下では、補間フレームIF内の一つのブロックを補間により生成するに当たっての処理を説明する。この処理のためには、補間フレームIF内の補間しようとするブロック(補間対象ブロック)を、縮小フレームSF0、SF1、SF2を生成する際と同じ縮小率αで縮小したブロック(縮小ブロック)に対応する、第1の縮小遅延フレームSF1内の一つのブロックF1Baを処理対象ブロックとして設定し、該処理対象ブロックF1Baと、現縮小フレームSF0内の複数のブロックと、第2の縮小遅延フレームSF2内の複数のブロックが切り出される(抽出される)。現縮小フレームSF0から切り出されるブロックと、第2の縮小遅延フレームSF2から切り出されるブロックとは、処理対象ブロックF1Ba(厳密には、その中心)を中心として点対称の位置にあるもので、これらが対として用いられる。
現フレームブロック切り出し部31及び第2の遅延フレームブロック切り出し部33は、処理対象ブロックF1Baを中心とし、互いに点対称の位置にあり、一方が現縮小フレームSF0内に位置し、他方が第2の縮小遅延フレームSF2内に位置するブロックの対を複数個切り出す。
【0025】
例えば、現縮小フレームSF0から切り出されるブロックF0B1(厳密には、その中心)と、第2の縮小遅延フレームSF2から切り出されるブロックF2B1(厳密には、その中心)とは、第1の縮小遅延フレームSF1内の処理対象ブロックF1Ba(厳密には、その中心)を中心として点対称の位置にあるもので、これらの点対称の位置にある2つのブロックが対(ペア)として用いられる。
【0026】
現縮小フレームSF0及び第2の縮小遅延フレームSF2から切り出されるブロックの対は、動きベクトル検出部12において検出される動きベクトルの候補に対応するものであり、例えば動きベクトルの探索範囲内のすべてのブロックが切り出される。例えば、第1の縮小遅延フレームSF1内の一つのブロックの中心を中心として、横方向に±HS画素、縦方向に±VS画素(±VSライン)の範囲を探索する場合、第2の縮小遅延フレームSF2及び現縮小フレームSF0から、それぞれ(2HS+1)×(2VS+1)個のブロックが切り出される。
【0027】
なお、探索範囲内のすべてのブロックについて評価を行う必要がない場合、例えば予め或いは他の情報により動きの方向の範囲が予測できる場合には、上記の探索範囲の予測される範囲内のブロックのみを切り出すこととしても良い。また、探索範囲内のブロックを間引きながら(例えば水平方向及び垂直方向に1画素おきに)切り出すこととしても良い。
【0028】
以下では、現縮小フレームSF0及び第2の縮小遅延フレームSF2から切り出されるブロックの数をMとし、現縮小フレームSF0から切り出されるブロックを第1乃至第MのブロックF0B1〜F0BM、第2の縮小遅延フレームSF2から切り出されるブロックを第1乃至第MのブロックF2B1〜F2BMと呼ぶ。また、各ブロックのデータをブロックと同じ符号で表す。
【0029】
第2の縮小遅延フレームSF2内の第mのブロックF2Bm(m=1〜M)と現縮小フレームSF0内の第mのブロックF0Bmとは、第2の縮小遅延フレームSF1内の処理対象ブロックF1Ba(厳密にはその中心の画素)を中心として点対称の位置にあるので、ブロックF2Bmの処理対象ブロックF1Baに対する横方向のずれをh(h=−HS〜+HS)、縦方向のずれをv(v=−VS〜+VS)とすると、ブロックF0Bmの処理対象ブロックF1Baに対する横方向のずれは−h、縦方向のずれは−vである。
【0030】
現フレームブロック切り出し部31は、現縮小フレーム内の複数の、即ち第1乃至第Mのブロックを切り出して、第1乃至第MのブロックデータF0B1〜F0BMを出力する。
第1の遅延フレームブロック切り出し部32は、第1の縮小遅延フレーム内の処理対象ブロックF1Baを切り出す。このブロックブロックF1Baは、補間フレームIF内の補間対象ブロックを縮小したブロックに対応するものである。
第2の遅延フレームブロック切り出し部33は、第2の縮小遅延フレーム内の複数の、即ち第1乃至第Mのブロックを切り出して、第1乃至第MのブロックデータF2B1〜F2BMを出力する。
【0031】
現縮小フレームSF0のブロックデータと第2の縮小遅延フレームSF2のブロックデータが、テスト補間部4に入力される。テスト補間部4は、第2の縮小遅延フレームSF2のブロックデータと現縮小フレームSF0のブロックデータのうち、処理対象ブロックF1Baを中心として、互いに点対称の位置にある第2の縮小遅延フレームSF2内のブロックと、現縮小フレームSF0内のブロックから成るブロック対のデータに基づいて、テスト補間データTDA1〜TDAMを生成する。複数のブロック対に基づいて複数のテスト補間データが生成される。このテスト補間は、上記点対称の中心の位置、即ち上記処理対象ブロックF1Baのデータが未知であると仮定して行うものであり、補間が正確であればあるほど、テスト補間データは、処理対象ブロックF1Baのデータとの相関が強いものとなる。
【0032】
テスト補間部4は、さらに入力された現縮小フレームSF0のブロックデータをそのまま処理対象ブロックF1Baの位置のデータとしたものを、テスト補間データTDB1〜TDBMとして出力し、入力された第2の縮小遅延フレームSF2のブロックデータをそのまま処理対象ブロックF1Baの位置のデータとしたものを、テスト補間データTDC1〜TDCMとして出力する。
区別のため、テスト補間データTDA1〜TDAMは第1群の第1乃至第Mのテスト補間データと呼ばれ、テスト補間データTDB1〜TDBMは第2群の第1乃至第Mのテスト補間データと呼ばれ、テスト補間データTDC1〜TDCMは第3群の第1乃至第Mのテスト補間データと呼ばれる。
【0033】
補間データ評価部5は、第1の縮小遅延フレームSF1のブロックデータを参照して複数のテスト補間データの評価を行い、評価データEDを動きベクトル決定部6に出力する。この評価においては、テスト補間データと、第1の縮小遅延フレームSF1のブロックデータとの相関を求め、相関が強いほど高い評価が与えられる。
【0034】
動きベクトル決定部6は、評価データEDに基づいて第1の縮小動きベクトルSMV1と第2の縮小動きベクトルSMV2を生成して出力する。
【0035】
動きベクトル拡大部7は、第1の縮小動きベクトルSMV1と第2の縮小動きベクトルSMV2の値を拡大して第1の動きベクトルMV1と第2の動きベクトルMV2を生成して出力する。ここで、拡大率は縮小フレームSF0、SF1、SF2の生成の際の縮小率αの逆数に等しく、1/αで表される。
【0036】
次に、図2及び図3を参照して動きベクトル検出部12のテスト補間部4、補間データ評価部5及び動きベクトル決定部の具体例についてさらに詳しく説明する。
【0037】
テスト補間部4は、複数の、即ち第1乃至第Mのテスト補間データ生成部4−1〜4−Mを備え、補間データ評価部5は、第1群の第1乃至第Mの相関値算出部5A−1〜5A−Mと、第2群の第1乃至第Mの相関値算出部5B−1〜5B−Mと、第3群の第1乃至第Mの相関値算出部5C−1〜5C−Mを備える。
【0038】
テスト補間データ生成部4−1〜4−Mは、現縮小フレームSF0のブロックのデータF0B1〜F0BMと、それぞれこれらと対をなす第2の縮小遅延フレームSF2のブロックのデータF2B1〜F2BMを画素ごとに平均することで得られる平均値から成るデータを第1群のテスト補間データTDA1〜TDAMとして算出する。テスト補間データ生成部4−1〜4−Mで、平均を求めるのに用いられるデータは、互いに異なる位置にあるブロックのデータである。
テスト補間部4また、上記のように、現縮小フレームSF0のブロックのデータF0B1〜F0BMを第2群のテスト補間データTDB1〜TDBMとして、第2の縮小遅延フレームSF2のブロックのデータF2B1〜F2BMを第3群のテスト補間データTDC1〜TDCMとして出力する。図1には、テスト補間データTDA1〜TDCMの集合が符号TDで表されている。
【0039】
以下、より詳しく説明する。
現縮小フレームSF0の第1のブロックデータF0B1と第2の縮小遅延フレームSF2の第1のブロックデータF2B1がテスト補間データ生成部4−1に入力される。
【0040】
テスト補間データ生成部4−1は、現縮小フレームSF0の第1のブロックデータF0B1と第2の縮小遅延フレームSF2の第1のブロックデータF2B1の画素ごとの平均値を第1群の第1のテスト補間データTDA1として相関値算出部5A−1に出力する。ここで画素ごとの平均値とは、現縮小フレームSF0内のブロックにおける各画素と、第2の縮小遅延フレームSF2内のブロックにおける対応する位置の画素の画素値(例えばそれぞれのブロックの基準位置、例えば左上隅を原点として同じ座標値で表される画素の画素値)の平均値を意味する。
【0041】
同様に、現縮小フレームSF0の第2のブロックデータF0B2と第2の縮小遅延フレームSF2の第2のブロックデータF2B2がテスト補間データ生成部4−2に入力される。テスト補間データ生成部4−2は、現縮小フレームSF0の第2のブロックデータF0B2と第2の縮小遅延フレームSF2の第2のブロックデータF2B2の画素ごとの平均値を第1群の第2のテスト補間データTDA2として相関値算出部5A−2(図示しない)に出力する。
【0042】
テスト補間データ生成部4−3(図示しない)〜4−Mも同様に現縮小フレームSF0の第3のブロックデータF0B3乃至第MのブロックデータF0BMと第2の縮小遅延フレームSF2の第3のブロックデータF2B3乃至第MのブロックデータF2BMに基づいて第1群の第3のテスト補間データTDA3乃至第Mのテスト補間データTDAMを生成し、相関値算出部5A−3(図示しない)〜5A−Mに出力する。
【0043】
一般化して言えば、テスト補間データ生成部4−mは、現縮小フレームSF0の第mのブロックデータF0Bm(m=1〜M)と第2の縮小遅延フレームSF2の第mのブロックデータF2Bmに基づいて、例えばこれらの画素ごとの平均を求めることで、第1群の第mのテスト補間データTDmを生成し、相関値算出部5A−mに出力する。
【0044】
テスト補間部4さらに、現縮小フレームSF0のブロックのデータF0B1〜F0BMを、テスト補間データTDB1〜TDBMとして、相関値算出部5B−1〜5B−Mに出力し、第2の縮小遅延フレームSF2のブロックのデータF2B1〜F2BMを、テスト補間データTDC1〜TDCMとして相関値算出部5B−1〜5C−Mに出力する。
一般化して言えば、テスト補間部4は、現縮小フレームSF0の第mのブロックのデータF0Bmを、第2群の第mのテスト補間データTDBmとして相関値算出部5B−mに出力し、第2の縮小遅延フレームSF2の第mのブロックのデータF2Bmを、第3群の第mのテスト補間データTDCmとして相関値算出部5C−mに出力する。
【0045】
第1の縮小遅延フレームSF1の処理対象ブロックF1Baのデータが補間データ評価部5内の相関値算出部5A−1〜5C−Mに入力される。
【0046】
相関値算出部5A−1〜5C−Mは、それぞれテスト補間部4から出力されるテスト補間データTDA1〜TDCMと第1の縮小遅延フレームSF1の処理対象ブロックF1Baのデータの相関値、例えば差分絶対値和を算出し、評価データEDA1〜EDCMとして出力する。
【0047】
相関値算出部5A−1は、第1群の第1のテスト補間データTDA1の各画素のデータと第1の縮小遅延フレームSF1の処理対象ブロックF1Baの各画素のデータの差分絶対値の和を算出し、評価データEDA1として動きベクトル決定部6に出力する。差分絶対値和は下記の式(1)により表される。
【0048】
【数1】
【0049】
ここで、BK1、BK2はブロック内の各画素のデータであり、BK1をテスト補間データTDA1を構成する各画素のデータ、BK2を処理対象ブロックF1Ba内の各画素のデータとすると式(1)は第1群の第1のテスト補間データTDA1の各画素のデータと第1の遅延フレームF1の処理対象ブロックF1Baの各画素のデータの差分絶対値和となる。差分絶対値和SADは、相関の度合いを表すものであり、評価データEDA1として相関値算出部5A−1から出力される。
【0050】
式(1)で与えられる差分絶対値和は、その値が小さいほど、相関が強いことを意味し、差分絶対値和SADを評価データとして用いる場合、その値が小さいほど、評価が高いことを表す。
【0051】
相関値算出部5A−2〜5C−Mも同様に、第1群の第2のテスト補間データTDA2乃至第3群の第Mのテスト補間データTDCMと第1の縮小遅延フレームSF1の処理対象ブロックF1Baのデータの差分絶対値和を算出し、評価データEDA2〜EDCMとして動きベクトル決定部6に出力する。
【0052】
評価データEDA1〜EDCMのうち、第1群のテスト補間データTDA1〜TDAMに対応するものを第1群の評価データEDA1〜EDAMと言い、第2群のテスト補間データTDB1〜TDBMに対応するものを第2群の評価データEDB1〜EDBMと言い、第3群のテスト補間データTDC1〜TDCMに対応するものを第3群の評価データEDC1〜EDCMと言う。
【0053】
動きベクトル決定部6は、評価データEDA1〜EDCMのうちの値が最小のもの(最も高い評価を示すもの)を見つける。
【0054】
評価データEDA1〜EDCMのうち値が最小のものが第1群の評価データEDA1〜EDAMのいずれかである場合には、動きベクトル決定部6は、第1の縮小遅延フレームSF1の処理対象ブロックF1Baの位置に対する、当該最小値の評価データに対応する、第2の縮小遅延フレームSF2内のブロックの相対位置(位置の差)を第1の縮小動きベクトルSMV1として出力し、第1の縮小遅延フレームSF1の処理対象ブロックF1Baの位置に対する、当該最小値の評価データに対応する、現縮小フレームSF0内のブロックの相対位置(位置の差)を第2の縮小動きベクトルSMV2として出力する。なお、同じ評価データに対応する第2の縮小遅延フレームSF2内のブロックと現縮小フレームSF0内のブロックとは、処理対象ブロックF1Baを中心として点対称の位置にあるので、SMV2=−SMV1の関係がある。
【0055】
評価データEDA1〜EDCMのうち値が最小のものが第2群の評価データEDB1〜EDBMのいずれかである場合には、動きベクトル決定部6は、第1の縮小遅延フレームSF1の処理対象ブロックF1Baの位置に対する、当該最小値の評価データに対応する、現縮小フレームSF0内のブロックの相対位置(位置の差)を第2の縮小動きベクトルSMV2として出力し、第1の縮小動きベクトルSMV1の代わりに対応するブロックがない(差分絶対値和が十分に小さいブロックがない)こと、即ち有効データがないことを示す信号(データ乃至フラグ)を出力する。
【0056】
評価データEDA1〜EDCMのうち値が最小のものが第3群の評価データEDB1〜EDCMのいずれかである場合には、動きベクトル決定部6は、第1の縮小遅延フレームSF1の処理対象ブロックF1Baの位置に対する、当該最小値の評価データに対応する、第2の縮小遅延フレームSF1内のブロックの相対位置(位置の差)を第1の縮小動きベクトルSMV1として出力し、第2の縮小動きベクトルSMV2の代わりに対応するブロックがない(差分絶対値和が十分に小さいブロックがない)こと、即ち有効データがないことを示す信号を出力する。
【0057】
動きベクトル拡大部7は、下記の式(2A)及び式(2B)により縮小動きベクトルSMV1及びSMV2を拡大して、動きベクトルMV1及びMV2を出力する。ここで、縮小動きベクトルSMV1及びSMV2は縮小画像における値であり、動きベクトルMV1及びMV2は入力画像における値である。つまり、縮小動きベクトルSMV1及びSMV2は、それぞれ第2の縮小遅延フレームSF2から第1の縮小遅延フレームSF1及び現縮小フレームSF0から第1の縮小遅延フレームSF1への動きベクトルであり、動きベクトルMV1及びMV2はそれぞれ第2の遅延フレームF2から第1の遅延フレームF1、及び現フレームF0から第1の遅延フレームF1への動きベクトルである。
【0058】
MV1=SMV1/α …(2A)
MV2=SMV2/α …(2B)
【0059】
ただし、縮小動きベクトルSMV1の代わりに対応ブロックなしを示す信号が出力されている場合、動きベクトルMV1の代わりに対応ブロックなしを示す信号を出力し、縮小動きベクトルSMV2の代わりに対応ブロックなしを示す信号が出力されている場合、動きベクトルMV2の代わりに対応ブロックなしを示す信号を出力する。
【0060】
図4は、動きベクトル検出部12の動作を説明するための図である。ここでは、M=1の場合について説明する。
第1の縮小遅延フレームSF1の一部の領域が第1の縮小遅延フレームSF1の処理対象ブロックF1Baとして切り出されている。
【0061】
第1の縮小遅延フレームSF1の処理対象ブロックF1Baに対してベクトル−V1ずらした位置に対応する領域が第2の縮小遅延フレームSF2の第1のブロックデータF2B1として設定されて切り出され、ベクトル+Vずらした位置に対応する領域が現縮小フレームSF0の第1のブロックデータF0B1として設定されて切り出される。
【0062】
テスト補間データ生成部4−1は、現縮小フレームSF0の第1のブロックデータF0B1と第2の縮小遅延フレームSF2の第1のブロックデータF2B1を画素ごとに平均してテスト補間データTDA1を生成する。
さらに、テスト補間部4は、現縮小フレームSF0の第1のブロックデータF0B1をテスト補間データTDB1として、第2の縮小遅延フレームSF2の第1のブロックデータF2B1をテスト補間データTDC1として出力する。
【0063】
相関値算出部5A−1は、テスト補間データTDA1と第1の縮小遅延フレームSF1の処理対象ブロックF1Baのデータから上記の式(1)を使って差分絶対値和SADを算出し、評価データEDA1として出力する。
【0064】
相関値算出部5B−1も同様に、テスト補間データTDB1と第1の縮小遅延フレームSF1の処理対象ブロックF1Baのデータから上記の式(1)を使って差分絶対値和SADを算出し、評価データEDB1として出力する。
相関値算出部5C−1も同様に、テスト補間データTDC1と第1の縮小遅延フレームSF1の処理対象ブロックF1Baのデータから上記の式(1)を使って差分絶対値和SADを算出し、評価データEDC1として出力する。
【0065】
動きベクトル決定部6は、評価データEDA1、EDB1、EDC1のうち最小の値を生じさせたブロック又はブロック対と第1の縮小遅延フレームSF1内の処理対象ブロックF1Baの相対位置に基づいて縮小動きベクトルを求める。
【0066】
評価データEDA1が最小値である場合には、第1の縮小遅延フレームSF1内の処理対象ブロックF1Baに対する第2の縮小フレームSF2内のブロックの相対位置を第1の縮小動きベクトルSMV1(=V1)として出力し、第1の縮小遅延フレームSF1内の処理対象ブロックF1Baに対する現縮小フレームSF0内のブロックの相対位置を第2の縮小動きベクトルSMV2(=−V1)として出力する。
【0067】
評価データEDB1が最小値である場合、第1の縮小動きベクトルSMV1の代わりに、対応ブロックなしを示す信号が出力され、第1の縮小遅延フレームSF1内の処理対象ブロックF1Baに対する現縮小フレームSF0内のブロックの相対位置が第2の縮小動きベクトルSMV2(=−V1)として出力される。
【0068】
評価データEDC1が最小値である場合、第1の縮小遅延フレームSF1内の処理対象ブロックF1Baに対する第2の縮小遅延フレームSF2内のブロックの相対位置が第1の縮小動きベクトルSMV1(=V1)として出力され、第2の縮小動きベクトルSMV2の代わりに対応ブロックなしを示す信号が出力される。
【0069】
図4では、M=1の場合について説明したが、本発明に係る実施の形態の構成はM=1に限定されない。即ち、候補としてのベクトルに対応するブロック対を2個以上設定しても良い。例えば、第1の縮小遅延フレーム内の処理対象ブロックF1Baに対して、所定の動き量に対応する探索範囲内に位置する第2の縮小遅延フレーム内のすべてのブロック及びこれと点対称位置にある現縮小フレーム内のブロックから成るブロック対について平均値の算出によるテスト補間データの生成を行うこととしても良い。
【0070】
動きベクトル検出部12では、上記のように実在のデータである第1の縮小遅延フレームSF1内のデータを用いて第1の縮小遅延フレームSF2内のブロック及び現縮小フレームSF0内のブロックから成るブロック対に対応するベクトルの候補を評価することにより動きベクトルを決定しているので第2の縮小遅延フレームSF1及び現縮小フレームSF0から第1の縮小遅延フレームSF1への動きベクトルを精度良く算出することができる。
さらに、第2の縮小遅延フレームSF2内のデータのみ、或いは現縮小フレームSF0内のデータのみを、ベクトル候補に対応するテスト補間データとして用いているので、第2の縮小遅延フレームから現縮小フレームの間で物体が隠れたり、出現したりしても動きベクトルを精度良く算出することができる。
【0071】
なお、補間データ評価部5では差分絶対値和を用いて評価データを算出したが、相関を求める関数は自乗誤差和など他にも多数あり、これに置き換えることも可能である。即ち、補間データ評価部5は、テスト補間データと、処理対象ブロックのデータとの相関を求めるものであれば良く、該相関を示す指標(相関値)は、差分絶対値和以外のものであっても良い。
【0072】
また、動きベクトル決定部6では、テスト補間データTDA1〜TDCM相互間に異なる重みをつけることで、いずれかのテスト補間データに対応するベクトル候補が、求める動きベクトルであると判定される可能性を高めるようにしても良い。
例えば、相関値算出部5B−1〜5C−Mで求めた差分絶対値和にある係数β1を乗算したものを評価データEDB1〜EDCMとして出力し、相関値算出部5A−1〜5A−Mで求めた差分絶対値和に対して上記の係数β1より小さい係数β2を乗算したものを評価データEDA1〜EDAMとして出力し、動きベクトル決定部6で、これらの評価データEDA1〜EDCMのうちの値が最小のものを見つけるようにしても良い。こうすれば、テスト補間データTDA1〜TDAMに対応するブロック対が求める動きベクトルに対応するものと判断される可能性を高めることができる。言い換えれば、テスト補間データTDA1〜TDAMに対応するブロック対に対応するベクトルを優先的に動きベクトルとして選択することができる。
【0073】
逆に、相関値算出部5B−1〜5C−Mで求めた差分絶対値和にある係数β1を乗算したものを評価データEDB1〜EDCMとして出力し、相関値算出部5A−1〜5A−Mで求めた差分絶対値和に対して上記の係数β1より大きい係数β2を乗算したものを評価データEDA1〜EDAMとして出力し、動きベクトル決定部6で、これらの評価データEDA1〜EDCMのうちの値が最小のものを見つけるようにしても良い。こうすれば、テスト補間データTDB1〜TDCMに対応するブロックが、求める動きベクトルに対応するものと判断される可能性を高めることができる。言い換えれば、テスト補間データTDB1〜TDCMに対応するブロックに対応するベクトルを優先的に動きベクトルとして選択することができる。
【0074】
なお、このような重み付けに加えて、他の要因による重み付けを加えても良い。
例えば、第2の縮小遅延フレームSF2及び現縮小フレームSF0内のブロックのうち、第1の縮小遅延フレームSF1内の処理対象ブロックF1Baの位置に近いブロック又はブロック対(対応するベクトルの絶対値が小さいブロック)について求められる差分絶対値和に対してより小さな係数を乗算することで、より近いブロック又はブロック対が、求める動きベクトルに対応するものと判断される可能性を高めることとしても良い。
要するに、評価データは、差分絶対値和、或いは他の相関値に基づいて定められるものであれば良い。
【0075】
次に、図5〜図7を参照して、動きベクトル変換部13及び補間フレーム生成部14の動作についてより詳細に説明する。
【0076】
動きベクトル変換部13は、第2の遅延フレームF2から第1の遅延フレームF1への第1の動きベクトルMV1及び現フレームF0から第1の遅延フレームF1への第2の動きベクトルMV2を、第1の遅延フレームF1から補間フレームIFへの第3の動きベクトルMV3と、現フレームF0から補間フレームIFへの第4の動きベクトルMV4に変換する。
【0077】
図5〜図7に示すように入力フレームの時間間隔をt1、第1の遅延フレームF1から補間フレームIFへの時間間隔をt2とした時、下記の式(3A)及び式(3B)により動きベクトルMV3及びMV4を算出する。たとえば、60Hzの入力画像信号から120Hzの画像信号に変換する場合、t1は1/60秒、t2は1/120秒となる。
【0078】
MV3=MV1×t2/t1 …(3A)
MV4=MV2×(t1−t2)/t1 …(3B)
【0079】
ただし、動きベクトルMV1の代わりに対応ブロックなしを示す信号が出力されている場合、動きベクトルMV3の代わりに対応ブロックなしを示す信号を出力し、動きベクトルMV2の代わりに対応ブロックなしを示す信号が出力されている場合、動きベクトルMV4の代わりに対応ブロックなしを示す信号を出力する。
【0080】
このようにして第3及び第4の動きベクトルMV3及びMV4を求めたら、図5〜図7に示すように補間フレームIFからベクトル−MV3の位置の、縮小前の第1の遅延フレームF1のデータ(処理対象ブロックF1Baに対応するブロックF1Bb内のデータ)と補間フレームIFからベクトル−MV4の位置の、縮小前の現フレームF0のデータ(ブロックF1Bbと同じ大きさのブロックのデータ)の双方又は一方に基づいて補間フレームIFのデータ(ブロックF1Bbと同じ大きさのブロックIFBbのデータ)を求める。
【0081】
例えば、図5に示すように、第3及び第4の動きベクトルMV3及びMV4の双方とも、有効なデータである場合(「対応ブロックなし」ではない場合)には、上記の第1の遅延フレームF1内のデータ及び現フレームF0内のデータの平均を補間フレームIFのデータとして算出する。生成したデータから成る補間フレームIFのデータを第1の遅延フレームF1のデータと現フレームF0のデータ間に配置して出力する。
このとき、補間に用いられる第1の遅延フレームF1のブロックデータ(第1の縮小遅延フレームSF1の処理対象ブロックF1Baに対応するブロックF1Bbのデータ)と、現フレームF0のブロックデータ(現縮小フレームSF0のブロックF0B1に対応するブロック)とは、補間フレームIF内の補間により得られるデータの位置を中心として、互いに対称の位置にある。
【0082】
図6又は図7に示すように、第3及び第4の動きベクトルMV3及びMV4の一方の代わりに「対応ブロックなし」の信号が出力されている場合には、他方の動きベクトル(第3及び第4の動きベクトルMV3及びMV4のうちの有効なベクトル)に対応する第1の遅延フレームF1内のデータ又は現フレームF0内のデータを、補間フレームIFのデータ(ブロックF1Bbと同じ大きさのブロックIFBbのデータ)として出力する。図6は、第4の動きベクトルMV4の代わりに「対応ブロックなし」の信号が出力されている場合を示し、図7は、第3の動きベクトルMV3の代わりに「対応ブロックなし」の信号が出力されている場合を示す。このように一方のフレーム内のデータをそのまま補間フレームのデータとして出力する処理は「零次補間」と呼ばれる。
補間フレーム生成部14は、このようにして得られたデータから成る補間フレームIFのデータを第1の遅延フレームF1のデータと現フレームF0のデータ間に配置して出力する。
【0083】
図8は、動きベクトル検出部12に入力される現フレームF0のデータ、第1の遅延フレームF1のデータ、第2のフレームF2のデータの対応関係を説明するための図である。図8に示すような映像を表す信号が入力された場合の本実施の形態1の動作を説明する。図8に示す映像においては、クロスハッチングで示す丸BCが時間とともに画面の左上から右下へ移動しており、その背後にある英文字(移動なし)が隠れたり見えたりしている。
【0084】
図9は図8に示す入力画像を縮小した画像データを示す図である。但し、図9でも画像は図8と同じ大きさに描いてある。図8の画像の要素(丸BC及びA〜Jを示す文字は、図9でもそのまま現れており、従って、英文字A〜Jが丸BCの陰に隠れたり、見えたりしている。
図10〜図16はテスト補間部4及び補間データ評価部5の動作を説明するための図である。図17は動きベクトル拡大部7の動作を説明するための図である。
【0085】
図9に示すような第2の縮小遅延フレームSF2のデータ、第1の縮小遅延フレームSF1のデータ、現縮小フレームSF0のデータを入力とした場合の動きベクトル検出部12の動作を説明する。なお、ここではM=2を想定している。
【0086】
テスト補間部4では、動きベクトルの候補ごとにテスト補間データを生成する。
例えば、図10に示すように第1の縮小遅延フレームSF1の一部の領域を第1の縮小遅延フレームSF1の処理対象ブロックF1Baとし、第1の縮小遅延フレームSF1の処理対象ブロックF1Baから−V1ずらした位置の第2の縮小遅延フレームSF2のブロックを第1のブロックF2B1とし、第1の縮小遅延フレームSF1の処理対象ブロックF1BaからV1ずらした位置の現縮小フレームSF0のブロックをブロックF0B1とする。
また、第1の縮小遅延フレームSF1の処理対象ブロックF1Baから−V2ずらした位置の第2の縮小遅延フレームSF2のブロックをブロックF2B2とし、第1の縮小遅延フレームSF1の処理対象ブロックF1BaからV2ずらした位置の現縮小フレームSF0のブロックをブロックF0B2とする。
【0087】
図11に示すように、ブロックF2B1のデータとブロックF0B1のデータから得られる画素ごとの平均をテスト補間データTDA1として生成する。
同様に、図12に示すようにブロックF2B2のデータとブロックF0B2のデータから画素ごとの平均をテスト補間データTDA2として生成する。
さらに、図13及び図14に示すように、ブロックF0B1、F0B2のデータをそれぞれテスト補間データTDB1、TDB2として出力する。
同様に、図15及び図16に示すように、ブロックF2B1、F2B2のデータをそれぞれテスト補間データTDC1、TDC2として出力する。
【0088】
補間データ評価部5では、図11〜図16に示されるテスト補間データTDA1〜TD6の各々と処理対象ブロックF1Baのデータとの差分絶対値和を算出し、評価データEDA1〜ED6を出力する。図9〜図16の具体例では、第1の縮小遅延フレームSF1上の文字「F」を表す領域が処理対象ブロックF1Baとなっており、この文字「F」が、第2の縮小遅延フレームSF2および第1の縮小遅延フレームSF1では見えているが、現縮小フレームF0ではハッチングで示す丸BCの陰に隠れており、従って、第2の縮小遅延フレームSF2内の文字「F」を表す領域から成るブロックF2B1から得られたテスト補間データTD5と、処理対象ブロックF1Baとの差分絶対値和、即ち評価データED5が最小となる。
【0089】
動きベクトル決定部6では、評価データEDA1〜ED6のうち一番小さい評価データED5に対応した縮小動きベクトルSMV1(=V1)を出力し、縮小動きベクトルSMV2の代わりに対応ブロックなしを示す信号を出力する。
【0090】
動きベクトル拡大部7では、縮小動きベクトルSMV1とSMV2に対して上記の式(2A)及び式(2B)を用いて、第2の遅延フレームF2から第1の遅延フレームF1への動きベクトルMV1と現フレームF0から第1の遅延フレームF1への動きベクトルMV2を出力する(図17)。
先にも述べたように、縮小動きベクトルの一方の代わりに対応ブロックなしを示す信号が出力されている場合には、当該縮小動きベクトルに対応する動きベクトル(MV1又はMV2)に対しても、代わりに「対応ブロックなし」を示す信号が出力されるので、図9〜図16の例では、動きベクトルMV1(=V1/α)が出力されるとともに、MV2の代わりに対応ブロックなしを示す信号が出力される。
【0091】
第1の遅延フレームF1を縮小した第1の縮小遅延フレームSF1についてもれなく(隙間なく)ブロックを設定し縮小動きベクトルを算出することで第1の縮小遅延フレームSF1のすべての部分について第1及び第2の縮小動きベクトルSMV1及び/又はSMV2を、生成し、第1及び第2の縮小動きベクトルSMV1、SMV2を拡大することで、第1及び第2の動きベクトルMV1及び/又はMV2を得て、上記第1の縮小遅延フレームSF1内の上記の画素に対応する第1の遅延フレームF1内の画素に対応する位置、例えば同じ位置にある、補間フレームIF内の画素について、第1及び第2の動きベクトルMV1及びMV2を用いた変換を行うことで、第3及び第4の動きベクトルMV3及びMV4を求めることとしても良い。
【0092】
代わりに、第1の遅延フレームF1を縮小した第1の縮小遅延フレームSF1内の各画素を中心とする所定の大きさのブロックについて、上記の処理を行うことで、当該画素についての第1の縮小動きベクトルSMV1及び第2の縮小動きベクトルSMV2を生成し、第1及び第2の縮小動きベクトルSMV1、SMV2を拡大することで、第1及び第2の動きベクトルMV1及び/又はMV2を得て、上記第1の縮小遅延フレームSF1内の上記の画素に対応する第1の遅延フレームF1内の画素に対応する位置、例えば同じ位置にある、補間フレームIF内の画素について、第1及び第2の動きベクトルMV1及びMV2を用いた変換を行うことで、第3及び第4の動きベクトルMV3及びMV4を求めることとしても良い。
【0093】
図18(a)及び(b)は、動きベクトル変換部13の動作の具体例を説明するための図である。図18(a)は動きベクトル変換部13の入力、図18(b)は動きベクトル変換部13の出力を示す。
【0094】
動きベクトル変換部13は、図18(a)に示される、第2の遅延フレームF2から第1の遅延フレームF1への第1の動きベクトルMV1と、現フレームF0から第1の遅延フレームF1への動きベクトルMV2に対して上記の式(3A)及び式(3B)を用いて、図18(b)に示される、第1の遅延フレームF1から補間フレームIFへの第3の動きベクトルMV3と現フレームF0から補間フレームIFへの第4の動きベクトルMV4に変換する。図18(a)及び(b)に示す具体例では、MV1はV1/α、MV2の代わりに対応ブロックなしを示す信号が出力されており、t1は1/60秒、t2はt1の1/2に等しく1/120秒であり、上記の式(3A)及び式(3B)よりMV3はV1/2α、MV4の代わりに対応ブロックなしを示す信号が出力される。
【0095】
図19は、補間フレーム生成部14の動作の具体例を説明するための図である。図19は、図8〜図16と同様に、第1の遅延フレームF1上の文字「F」を表す領域が処理対象ブロックF1Baに対応するブロック(非縮小ブロック)F1Bbとなっており、この文字「F」が、第2の遅延フレームF2および第1の遅延フレームF1では見えているが、現フレームF0ではクロスハッチングで示す丸BCの陰に隠れており、従って、第2の遅延フレームF2内の文字「F」を表す領域から成るブロックF2B1から得られたテスト補間データTD5と、処理対象ブロックF1Baとの差分絶対値和、即ち評価データED5が最小となる場合を示している。この場合、図19に示すように補間フレームIFから−MV3動かした位置の第1の遅延フレームF1のデータを補間フレームIFのデータとして出力する。
このような処理を、補間フレームIF内のすべてのブロックに対して行うことで生成した補間フレームIFを第1の遅延フレームF1と現フレームF0の間に内挿して出力する。
【0096】
以上より、本実施の形態では、動きベクトルの評価を行うことにより動きベクトルが精度良く検出され、画像の乱れなく補間フレームを内挿することができる。さらに補間するフレーム前後で物体が隠れたり出現したりする場合でも、画像の乱れなく補間フレームを内挿することができる。
【0097】
ここで現フレーム画像縮小部21、第1の遅延フレーム画像縮小部22、第2の遅延フレーム画像縮小部23にて画像縮小処理をした場合と画像縮小処理をしない場合を比較する。画像縮小部21、22、23による画像縮小処理をしない場合、動きベクトル検出部12では入力画像データがそのまま処理され、画像縮小部21、22、23による画像縮小処理をする場合、動きベクトル検出部12には縮小画像データが処理される。この時、動きベクトルの探索に当たり、同じ大きさのベクトルの範囲を探索するとした場合、縮小画像を使用した方が広い範囲を探索することができ、従って、大きい動きを検出することができる。
また、縮小画像を用いる場合には、各ブロックに含まれる画素の数が、非縮小画像の各ブロックに含まれる画素の数よりも少なく、各ブロックについての差分絶対値和の計算において計算に用いられる画素の数が少ないので、演算量が減少して、応答性が向上するとともに、回路規模を小さくすることができる。
【0098】
以上、本発明をハードウェアで実現する場合について説明したが、図1に示される構成の一部又は全部をソフトウエアにより実現することも可能である。その場合の処理を図20及び図21を参照して説明する。
【0099】
図20は、図1に示される構成のうち、フレームメモリ11、動きベクトル検出部12、動きベクトル変換部13及び補間フレーム生成部14による処理をソフトウェアで実現するための、コンピュータシステムで構成された画像処理装置を示す。図示の画像処理装置は、プロセッサ101と、プログラムメモリ102と、データメモリ103と、入力インターフェース104と、出力インターフェース105と、これらを接続するバス106を有する。
【0100】
プロセッサ101は、プログラムメモリ102に記憶されたプログラムに従って動作し、入力インターフェース104を介して入力される画像に対する処理を行う。動作の過程で種々のデータをデータメモリ103に記憶させる。処理の結果生成される画像は、インターフェース105を介して図1に示す画像表示部15に供給され、画像表示部15による表示に用いられる。
以下、プロセッサ101により行なわれる処理を図21を参照して説明する。
【0101】
図21は、図20の画像処理装置で実施される画像処理方法のフローを示す。
【0102】
まず、動きベクトル検出ステップST1では、画像データF0と、画像データF0に対して1フレーム遅延した画像データF1と、画像データF0に対して2フレーム分遅延した画像データF2を参照して第2の遅延フレームF2から第1の遅延フレームF1への第1の動きベクトルMV1、及び現フレームF0から第1の遅延フレームF1への第2の動きベクトルV2を生成する。この動作は、図1の動きベクトル検出部12と同等である。
【0103】
動きベクトル変換ステップST2では、第1及び第2の動きベクトルMV1及びMV2を、第1の遅延フレームF1から補間フレームIF(現フレームF0と第1の遅延フレームF1の間に挿入される)への第3の動きベクトルMV3と、現フレームF0から補間フレームIFへの第4の動きベクトルMV4に変換する。この動作は、図1の動きベクトル変換部13と同等である。
【0104】
補間フレーム生成ステップST3では、第1の遅延フレームF1のデータ、現フレームF0のデータ、第3の動きベクトルMV3及び第4の動きベクトルMV4から補間フレームIFのデータを生成する。補間フレームIFのすべてのブロックについて上記の処理が繰り返され、これにより生成された補間フレームIFのデータを現フレームF0のデータと第1の遅延フレームF1のデータの間に挿入した画像データDOを生成する。この動作は、図1の補間フレーム生成部14と同等である。
【0105】
図21は、本実施の形態に係る画像表示装置の一部をソフトウェアとして実現したものであり、その効果は、図1の場合と同様である。
【符号の説明】
【0106】
2 画像縮小部、 3 ブロック切り出し部、 4 テスト補間部、 5 補間データ評価部、 6 動きベクトル決定部、 7 動きベクトル拡大部、 10 画像処理装置、 11 フレームメモリ、 12 動きベクトル検出部、 13 動きベクトル変換部、 14 補間フレーム生成部、 15 画像表示部、 21 現フレーム画像縮小部、 22 第1の遅延フレーム画像縮小部、 23 第2の遅延フレーム画像縮小部、 31 現フレームブロック切り出し部、 32 第2の遅延フレームブロック切り出し部、 33 第1の遅延フレームブロック切り出し部。
【特許請求の範囲】
【請求項1】
画像の現フレームと前記現フレームの1フレーム前のフレームである第1の遅延フレームとの間に補間フレームを挿入する画像処理装置において、
前記第1の遅延フレームのデータ及び前記現フレームの2フレーム前のフレームである第2の遅延フレームのデータを参照して前記第2の遅延フレームから前記第1の遅延フレームへの第1の動きベクトルを算出し、
前記現フレームのデータ及び前記第1の遅延フレームのデータを参照して前記現フレームから前記第1の遅延フレームへの第2の動きベクトルを算出する動きベクトル検出部と、
前記第1の動きベクトルを前記第1の遅延フレームから前記補間フレームへの第3の動きベクトルに変換し、
前記第2の動きベクトルを前記現フレームから前記補間フレームへの第4の動きベクトルに変換する動きベクトル変換部と、
前記第3の動きベクトル、前記第4の動きベクトル、前記第1の遅延フレームのデータ、及び前記現フレームのデータから、前記補間フレームのデータを生成し、前記補間フレームのデータを前記現フレームのデータと前記第1の遅延フレームのデータの間に挿入した画像データを出力する補間フレーム生成部とを有し、
前記動きベクトル検出部は、
前記現フレームを縮小して現縮小フレームを出力し、前記第1の遅延フレームを縮小して第1の縮小遅延フレームを出力し、前記第2の遅延フレームを縮小して第2の縮小遅延フレームを出力する画像縮小部と、
前記補間フレームの補間対象ブロックに対応する、前記第1の縮小遅延フレーム内のブロックを処理対象ブロックとして設定し、
前記第2の縮小遅延フレームの一部をなすブロックのデータ及び前記現縮小フレームの一部をなすブロックのデータの画素ごとの平均値で構成される第1群のテスト補間データと、
前記現フレームの一部をなすブロックのデータで構成される第2群のテスト補間データと、
前記第2の縮小遅延フレームのブロックデータ構成される第3群のテスト補間データと
を含む複数のテスト補間データを出力するテスト補間部と、
前記第1乃至第3群のテスト補間データのうち、前記処理対象ブロックのデータに対する前記各テスト補間データの相関の強さを評価し、該評価の結果を示す複数の評価データを出力する補間データ評価部と、
前記複数の評価データのうち最も相関の強いことを示す前記評価データを生じさせた前記テスト補間データに対応する動きベクトルを第1の縮小動きベクトル及び第2の縮小動きベクトルの少なくとも一方として出力する動きベクトル決定部と、
前記第1の縮小動きベクトル及び第2の縮小動きベクトルの少なくとも一方を拡大して前記第1及び第2の動きベクトルの少なくとも一方として出力する動きベクトル拡大部とを有し、
前記第1群のテスト補間データは、複数の前記第2の縮小遅延フレームのブロックのデータ及び複数の前記現縮小フレームのブロックから得られ、
前記第2群のテスト補間データは、複数の前記現縮小フレームのブロックから得られ、
前記第3群のテスト補間データは、複数の前記第2の縮小遅延フレームのブロックから得られる
ことを特徴とする画像処理装置。
【請求項2】
前記テスト補間部は、
各々前記第1の縮小遅延フレーム内の複数の画素から成る複数のブロックを順次処理対象ブロックとして選択し、該処理対象ブロックを中心として、
互いに点対称の位置にある、前記第2の縮小遅延フレーム内のブロックと、前記現縮小フレーム内のブロックとを抽出し、抽出した前記第2の縮小遅延フレームのブロックのデータと抽出した前記現縮小遅延フレームのブロックのデータの画素毎の平均値を、前記第1群のテスト補間データとして求め、
前記抽出した前記現縮小フレーム内の前記ブロックのデータを前記第2群のテスト補間データとして出力し、
前記抽出した前記第2の縮小遅延フレーム内の前記ブロックのデータを前記第3群のテスト補間データとして出力する
ことを特徴とする請求項1に記載の画像処理装置。
【請求項3】
前記テスト補間部は、複数個のテスト補間データ生成部を有し、
該複数個のテスト補間データ生成部は、それぞれ、前記現縮小フレーム内の互いに異なる位置ブロックのデータと前記第2の縮小遅延フレーム内の互いに異なる位置のブロックのデータを画素ごとに平均することで得られるデータを前記第1群のテスト補間データとして算出する
ことを特徴とする請求項2に記載の画像処理装置。
【請求項4】
前記補間データ評価部は、
前記テスト補間部から出力される前記複数のテスト補間データの各々と、
前記処理対象ブロックのデータとの間の相関を示す相関値を算出し、
該複数のテスト補間データについてそれぞれ求められる複数の相関値に基づいて前記複数の評価データを生成する
ことを特徴とする請求項1から3までのいずれか1項に記載の画像処理装置。
【請求項5】
前記補間データ評価部は、
前記テスト補間部から出力される前記複数のテスト補間データと
前記処理対象ブロックのデータとの間の差分の絶対値の総和である差分絶対値和を前記相関値として算出する
ことを特徴とする請求項1から4までのいずれか1項に記載の画像処理装置。
【請求項6】
前記補間データ評価部は、
前記処理対象ブロックのデータと、前記複数のテスト補間データとの差分絶対値和を算出する複数個の相関値算出部を有する
ことを特徴とする請求項5に記載の画像処理装置。
【請求項7】
請求項1から6までのいずれか1項に記載の画像処理装置と、
前記補間フレーム生成部から出力された画像データに基づく画像を表示する画像表示部と
を有することを特徴とする画像表示装置。
【請求項8】
画像の現フレームと前記現フレームの1フレーム前のフレームである第1の遅延フレームとの間に補間フレームを挿入する画像処理方法において、
前記第1の遅延フレームのデータ及び前記現フレームの2フレーム前のフレームである第2の遅延フレームのデータを参照して前記第2の遅延フレームから前記第1の遅延フレームへの第1の動きベクトルを算出し、
前記現フレームのデータ及び前記第1の遅延フレームのデータを参照して前記現フレームから前記第1の遅延フレームへの第2の動きベクトルを算出する動きベクトル検出ステップと、
前記第1の動きベクトルを前記第1の遅延フレームから前記補間フレームへの第3の動きベクトルに変換し、
前記第2の動きベクトルを前記現フレームから前記補間フレームへの第4の動きベクトルに変換する動きベクトル変換ステップと、
前記第3の動きベクトル、前記第4の動きベクトル、前記第1の遅延フレームのデータ、及び前記現フレームのデータから、前記補間フレームのデータを生成し、前記補間フレームのデータを前記現フレームのデータと前記第1の遅延フレームのデータの間に挿入した画像データを出力する補間フレーム生成ステップとを有し、
前記動きベクトル検出ステップは、
前記現フレームを縮小して現縮小フレームを出力し、前記第1の遅延フレームを縮小して第1の縮小遅延フレームを出力し、前記第2の遅延フレームを縮小して第2の縮小遅延フレームを出力する画像縮小ステップと、
前記補間フレームの補間対象ブロックに対応する、前記第1の縮小遅延フレーム内のブロックを処理対象ブロックとして設定し、
前記第2の縮小遅延フレームの一部をなすブロックのデータ及び前記現縮小フレームの一部をなすブロックのデータの画素ごとの平均値で構成される第1群のテスト補間データと、
前記現フレームの一部をなすブロックのデータで構成される第2群のテスト補間データと、
前記第2の縮小遅延フレームのブロックデータで構成される第3群のテスト補間データと
を含む複数のテスト補間データを出力するテスト補間ステップと、
前記第1乃至第3群のテスト補間データのうち、前記処理対象ブロックのデータに対する前記各テスト補間データの相関の強さを評価し、該評価の結果を示す複数の評価データを出力する補間データ評価ステップと、
前記複数の評価データのうち最も相関の強いことを示す前記評価データを生じさせた前記テスト補間データに対応する動きベクトルを第1の縮小動きベクトル及び第2の縮小動きベクトルの少なくとも一方として出力する動きベクトル決定ステップと、
前記第1の縮小動きベクトル及び第2の縮小動きベクトルの少なくとも一方を拡大して前記第1及び第2の動きベクトルの少なくとも一方として出力する動きベクトル拡大ステップとを有し、
前記第1群のテスト補間データは、複数の前記第2の縮小遅延フレームのブロックのデータ及び複数の前記現縮小フレームのブロックから得られ、
前記第2群のテスト補間データは、複数の前記現縮小フレームのブロックから得られ、
前記第3群のテスト補間データは、複数の前記第2の縮小遅延フレームのブロックから得られる
ことを特徴とする画像処理方法。
【請求項9】
前記テスト補間ステップは、
各々前記第1の縮小遅延フレーム内の複数の画素から成る複数のブロックを順次処理対象ブロックとして選択し、該処理対象ブロックを中心として、
互いに点対称の位置にある、前記第2の縮小遅延フレーム内のブロックと、前記現縮小フレーム内のブロックとを抽出し、抽出した前記第2の縮小遅延フレームのブロックのデータと抽出した前記現縮小遅延フレームのブロックのデータの画素毎の平均値を、前記第1群のテスト補間データとして求め、
前記抽出した前記現縮小フレーム内の前記ブロックのデータを前記第2群のテスト補間データとして出力し、
前記抽出した前記第2の縮小遅延フレーム内の前記ブロックのデータを前記第3群のテスト補間データとして出力する
ことを特徴とする請求項8に記載の画像処理方法。
【請求項10】
前記テスト補間ステップは、複数個のテスト補間データ生成ステップを有し、
該複数個のテスト補間データ生成ステップは、それぞれ、前記現縮小フレーム内の互いに異なる位置ブロックのデータと前記第2の縮小遅延フレーム内の互いに異なる位置のブロックのデータを画素ごとに平均することで得られるデータを前記第1群のテスト補間データとして算出する
ことを特徴とする請求項9に記載の画像処理方法。
【請求項11】
前記補間データ評価ステップは、
前記テスト補間ステップから出力される前記複数のテスト補間データの各々と、
前記処理対象ブロックのデータとの間の相関を示す相関値を算出し、
該複数のテスト補間データについてそれぞれ求められる複数の相関値に基づいて前記複数の評価データを生成する
ことを特徴とする請求項8から10までのいずれか1項に記載の画像処理方法。
【請求項12】
前記補間データ評価ステップは、
前記テスト補間ステップから出力される前記複数のテスト補間データと
前記処理対象ブロックのデータとの間の差分の絶対値の総和である差分絶対値和を前記相関値として算出する
ことを特徴とする請求項8から11までのいずれか1項に記載の画像処理方法。
【請求項13】
前記補間データ評価ステップは、
前記処理対象ブロックのデータと、前記複数のテスト補間データとの差分絶対値和を算出する複数個の相関値算出ステップを有する
ことを特徴とする請求項12に記載の画像処理方法。
【請求項14】
請求項8から13までのいずれか1項に記載の画像処理方法と、
前記補間フレーム生成ステップから出力された画像データに基づく画像を表示する画像表示ステップと
を有することを特徴とする画像表示方法。
【請求項1】
画像の現フレームと前記現フレームの1フレーム前のフレームである第1の遅延フレームとの間に補間フレームを挿入する画像処理装置において、
前記第1の遅延フレームのデータ及び前記現フレームの2フレーム前のフレームである第2の遅延フレームのデータを参照して前記第2の遅延フレームから前記第1の遅延フレームへの第1の動きベクトルを算出し、
前記現フレームのデータ及び前記第1の遅延フレームのデータを参照して前記現フレームから前記第1の遅延フレームへの第2の動きベクトルを算出する動きベクトル検出部と、
前記第1の動きベクトルを前記第1の遅延フレームから前記補間フレームへの第3の動きベクトルに変換し、
前記第2の動きベクトルを前記現フレームから前記補間フレームへの第4の動きベクトルに変換する動きベクトル変換部と、
前記第3の動きベクトル、前記第4の動きベクトル、前記第1の遅延フレームのデータ、及び前記現フレームのデータから、前記補間フレームのデータを生成し、前記補間フレームのデータを前記現フレームのデータと前記第1の遅延フレームのデータの間に挿入した画像データを出力する補間フレーム生成部とを有し、
前記動きベクトル検出部は、
前記現フレームを縮小して現縮小フレームを出力し、前記第1の遅延フレームを縮小して第1の縮小遅延フレームを出力し、前記第2の遅延フレームを縮小して第2の縮小遅延フレームを出力する画像縮小部と、
前記補間フレームの補間対象ブロックに対応する、前記第1の縮小遅延フレーム内のブロックを処理対象ブロックとして設定し、
前記第2の縮小遅延フレームの一部をなすブロックのデータ及び前記現縮小フレームの一部をなすブロックのデータの画素ごとの平均値で構成される第1群のテスト補間データと、
前記現フレームの一部をなすブロックのデータで構成される第2群のテスト補間データと、
前記第2の縮小遅延フレームのブロックデータ構成される第3群のテスト補間データと
を含む複数のテスト補間データを出力するテスト補間部と、
前記第1乃至第3群のテスト補間データのうち、前記処理対象ブロックのデータに対する前記各テスト補間データの相関の強さを評価し、該評価の結果を示す複数の評価データを出力する補間データ評価部と、
前記複数の評価データのうち最も相関の強いことを示す前記評価データを生じさせた前記テスト補間データに対応する動きベクトルを第1の縮小動きベクトル及び第2の縮小動きベクトルの少なくとも一方として出力する動きベクトル決定部と、
前記第1の縮小動きベクトル及び第2の縮小動きベクトルの少なくとも一方を拡大して前記第1及び第2の動きベクトルの少なくとも一方として出力する動きベクトル拡大部とを有し、
前記第1群のテスト補間データは、複数の前記第2の縮小遅延フレームのブロックのデータ及び複数の前記現縮小フレームのブロックから得られ、
前記第2群のテスト補間データは、複数の前記現縮小フレームのブロックから得られ、
前記第3群のテスト補間データは、複数の前記第2の縮小遅延フレームのブロックから得られる
ことを特徴とする画像処理装置。
【請求項2】
前記テスト補間部は、
各々前記第1の縮小遅延フレーム内の複数の画素から成る複数のブロックを順次処理対象ブロックとして選択し、該処理対象ブロックを中心として、
互いに点対称の位置にある、前記第2の縮小遅延フレーム内のブロックと、前記現縮小フレーム内のブロックとを抽出し、抽出した前記第2の縮小遅延フレームのブロックのデータと抽出した前記現縮小遅延フレームのブロックのデータの画素毎の平均値を、前記第1群のテスト補間データとして求め、
前記抽出した前記現縮小フレーム内の前記ブロックのデータを前記第2群のテスト補間データとして出力し、
前記抽出した前記第2の縮小遅延フレーム内の前記ブロックのデータを前記第3群のテスト補間データとして出力する
ことを特徴とする請求項1に記載の画像処理装置。
【請求項3】
前記テスト補間部は、複数個のテスト補間データ生成部を有し、
該複数個のテスト補間データ生成部は、それぞれ、前記現縮小フレーム内の互いに異なる位置ブロックのデータと前記第2の縮小遅延フレーム内の互いに異なる位置のブロックのデータを画素ごとに平均することで得られるデータを前記第1群のテスト補間データとして算出する
ことを特徴とする請求項2に記載の画像処理装置。
【請求項4】
前記補間データ評価部は、
前記テスト補間部から出力される前記複数のテスト補間データの各々と、
前記処理対象ブロックのデータとの間の相関を示す相関値を算出し、
該複数のテスト補間データについてそれぞれ求められる複数の相関値に基づいて前記複数の評価データを生成する
ことを特徴とする請求項1から3までのいずれか1項に記載の画像処理装置。
【請求項5】
前記補間データ評価部は、
前記テスト補間部から出力される前記複数のテスト補間データと
前記処理対象ブロックのデータとの間の差分の絶対値の総和である差分絶対値和を前記相関値として算出する
ことを特徴とする請求項1から4までのいずれか1項に記載の画像処理装置。
【請求項6】
前記補間データ評価部は、
前記処理対象ブロックのデータと、前記複数のテスト補間データとの差分絶対値和を算出する複数個の相関値算出部を有する
ことを特徴とする請求項5に記載の画像処理装置。
【請求項7】
請求項1から6までのいずれか1項に記載の画像処理装置と、
前記補間フレーム生成部から出力された画像データに基づく画像を表示する画像表示部と
を有することを特徴とする画像表示装置。
【請求項8】
画像の現フレームと前記現フレームの1フレーム前のフレームである第1の遅延フレームとの間に補間フレームを挿入する画像処理方法において、
前記第1の遅延フレームのデータ及び前記現フレームの2フレーム前のフレームである第2の遅延フレームのデータを参照して前記第2の遅延フレームから前記第1の遅延フレームへの第1の動きベクトルを算出し、
前記現フレームのデータ及び前記第1の遅延フレームのデータを参照して前記現フレームから前記第1の遅延フレームへの第2の動きベクトルを算出する動きベクトル検出ステップと、
前記第1の動きベクトルを前記第1の遅延フレームから前記補間フレームへの第3の動きベクトルに変換し、
前記第2の動きベクトルを前記現フレームから前記補間フレームへの第4の動きベクトルに変換する動きベクトル変換ステップと、
前記第3の動きベクトル、前記第4の動きベクトル、前記第1の遅延フレームのデータ、及び前記現フレームのデータから、前記補間フレームのデータを生成し、前記補間フレームのデータを前記現フレームのデータと前記第1の遅延フレームのデータの間に挿入した画像データを出力する補間フレーム生成ステップとを有し、
前記動きベクトル検出ステップは、
前記現フレームを縮小して現縮小フレームを出力し、前記第1の遅延フレームを縮小して第1の縮小遅延フレームを出力し、前記第2の遅延フレームを縮小して第2の縮小遅延フレームを出力する画像縮小ステップと、
前記補間フレームの補間対象ブロックに対応する、前記第1の縮小遅延フレーム内のブロックを処理対象ブロックとして設定し、
前記第2の縮小遅延フレームの一部をなすブロックのデータ及び前記現縮小フレームの一部をなすブロックのデータの画素ごとの平均値で構成される第1群のテスト補間データと、
前記現フレームの一部をなすブロックのデータで構成される第2群のテスト補間データと、
前記第2の縮小遅延フレームのブロックデータで構成される第3群のテスト補間データと
を含む複数のテスト補間データを出力するテスト補間ステップと、
前記第1乃至第3群のテスト補間データのうち、前記処理対象ブロックのデータに対する前記各テスト補間データの相関の強さを評価し、該評価の結果を示す複数の評価データを出力する補間データ評価ステップと、
前記複数の評価データのうち最も相関の強いことを示す前記評価データを生じさせた前記テスト補間データに対応する動きベクトルを第1の縮小動きベクトル及び第2の縮小動きベクトルの少なくとも一方として出力する動きベクトル決定ステップと、
前記第1の縮小動きベクトル及び第2の縮小動きベクトルの少なくとも一方を拡大して前記第1及び第2の動きベクトルの少なくとも一方として出力する動きベクトル拡大ステップとを有し、
前記第1群のテスト補間データは、複数の前記第2の縮小遅延フレームのブロックのデータ及び複数の前記現縮小フレームのブロックから得られ、
前記第2群のテスト補間データは、複数の前記現縮小フレームのブロックから得られ、
前記第3群のテスト補間データは、複数の前記第2の縮小遅延フレームのブロックから得られる
ことを特徴とする画像処理方法。
【請求項9】
前記テスト補間ステップは、
各々前記第1の縮小遅延フレーム内の複数の画素から成る複数のブロックを順次処理対象ブロックとして選択し、該処理対象ブロックを中心として、
互いに点対称の位置にある、前記第2の縮小遅延フレーム内のブロックと、前記現縮小フレーム内のブロックとを抽出し、抽出した前記第2の縮小遅延フレームのブロックのデータと抽出した前記現縮小遅延フレームのブロックのデータの画素毎の平均値を、前記第1群のテスト補間データとして求め、
前記抽出した前記現縮小フレーム内の前記ブロックのデータを前記第2群のテスト補間データとして出力し、
前記抽出した前記第2の縮小遅延フレーム内の前記ブロックのデータを前記第3群のテスト補間データとして出力する
ことを特徴とする請求項8に記載の画像処理方法。
【請求項10】
前記テスト補間ステップは、複数個のテスト補間データ生成ステップを有し、
該複数個のテスト補間データ生成ステップは、それぞれ、前記現縮小フレーム内の互いに異なる位置ブロックのデータと前記第2の縮小遅延フレーム内の互いに異なる位置のブロックのデータを画素ごとに平均することで得られるデータを前記第1群のテスト補間データとして算出する
ことを特徴とする請求項9に記載の画像処理方法。
【請求項11】
前記補間データ評価ステップは、
前記テスト補間ステップから出力される前記複数のテスト補間データの各々と、
前記処理対象ブロックのデータとの間の相関を示す相関値を算出し、
該複数のテスト補間データについてそれぞれ求められる複数の相関値に基づいて前記複数の評価データを生成する
ことを特徴とする請求項8から10までのいずれか1項に記載の画像処理方法。
【請求項12】
前記補間データ評価ステップは、
前記テスト補間ステップから出力される前記複数のテスト補間データと
前記処理対象ブロックのデータとの間の差分の絶対値の総和である差分絶対値和を前記相関値として算出する
ことを特徴とする請求項8から11までのいずれか1項に記載の画像処理方法。
【請求項13】
前記補間データ評価ステップは、
前記処理対象ブロックのデータと、前記複数のテスト補間データとの差分絶対値和を算出する複数個の相関値算出ステップを有する
ことを特徴とする請求項12に記載の画像処理方法。
【請求項14】
請求項8から13までのいずれか1項に記載の画像処理方法と、
前記補間フレーム生成ステップから出力された画像データに基づく画像を表示する画像表示ステップと
を有することを特徴とする画像表示方法。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】

【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【公開番号】特開2013−98961(P2013−98961A)
【公開日】平成25年5月20日(2013.5.20)
【国際特許分類】
【出願番号】特願2011−243198(P2011−243198)
【出願日】平成23年11月7日(2011.11.7)
【出願人】(000006013)三菱電機株式会社 (33,312)
【Fターム(参考)】
【公開日】平成25年5月20日(2013.5.20)
【国際特許分類】
【出願日】平成23年11月7日(2011.11.7)
【出願人】(000006013)三菱電機株式会社 (33,312)
【Fターム(参考)】
[ Back to top ]