
画像処理装置及び画像処理方法
【課題】高解像度画像を座標変換により変形処理して変形画像を生成する際に、大容量のメモリを不要とし、また、メモリのアクセス速度の低下を軽減する。
【解決手段】画像処理装置200は、入力画像を圧縮して圧縮画像を生成する画像圧縮部210と、圧縮画像を格納する記憶部220と、座標変換により画像を変形するための座標を計算し、その座標情報を出力する座標計算部250と、記憶部220に格納された圧縮画像を、座標情報に基づいて座標変換して読み出すことで、圧縮変形画像を生成する圧縮画像変形部230と、圧縮変形画像を伸長する画像伸長部230を有している。ここで、画像圧縮部210では、入力画像の少なくとも輝度信号(Y)について、ブロック分割して、ブロック単位にウェーブレット変換し、該ウェーブレット変換後、量子化してビット数を削減することにより圧縮画像を生成する。
【解決手段】画像処理装置200は、入力画像を圧縮して圧縮画像を生成する画像圧縮部210と、圧縮画像を格納する記憶部220と、座標変換により画像を変形するための座標を計算し、その座標情報を出力する座標計算部250と、記憶部220に格納された圧縮画像を、座標情報に基づいて座標変換して読み出すことで、圧縮変形画像を生成する圧縮画像変形部230と、圧縮変形画像を伸長する画像伸長部230を有している。ここで、画像圧縮部210では、入力画像の少なくとも輝度信号(Y)について、ブロック分割して、ブロック単位にウェーブレット変換し、該ウェーブレット変換後、量子化してビット数を削減することにより圧縮画像を生成する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、座標変換により画像を変形処理する画像処理装置及び画像処理方法に関する。
【背景技術】
【0002】
近年、車の後ろ部分を見るバックモニターなどにおいて、魚眼カメラの画像を変形し、魚眼画像に起因する画像の歪みを補正したり、視点変換に基づいた画像変形により真上から見た画像に変形することにより、ドライバーに見やすい画像を表示する画像撮像システムが開発されている(例えば、特許文献1、特許文献2)。
【0003】
この種の画像撮像システムでは、画像の一部切り出し、また変形により上記の機能を実現するため、表示される画像は、撮像素子より出力された画像の一部を拡大したものとなる。そのため、近年ではその拡大された画像の細かい部分まで表現できるように、1Mピクセル以上のピクセル数を持つ高解像度な撮像素子が用いることが要望されている。
【0004】
しかしながら、高解像度な撮像素子を用いる場合には、
(1)フレームバッファに用いるメモリのアクセススピードの問題
(2)フレームバッファに用いるメモリ容量の問題
が発生する。
【0005】
上記(1)について云えば、座標変換にはフレームバッファのメモリアドレスへのランダムアクセスが必要であり、またフレームバッファに用いられるDRAMなどは、連続するアドレスをリードするバーストリードではスループットが大きいが、ランダムアクセスする場合にはスループットが激減する。そのため、高解像度ではリードのスピードが間に合わなくなり、座標変換が破綻する。さらに高画質に座標変換を行うためには、ピクセルの間を補間するインターポレートと行う必要があり、その場合には1ピクセルの出力に対して、周辺の2ピクセル(横方向のみインターポレートの場合)または4ピクセル(縦・横方向のインターポレートを行う場合)のデータをリードする必要があり、さらにリードのスループットが必要となる。
【0006】
また、上記(2)について云えば、高解像な撮像素子のデータを格納するため、低解像度な撮像素子の場合と比較して、大きなメモリ容量が問題となる。例えば1メガピクセルクラスの撮像素子を用いて、単純にRGB8ビットずつのデータを格納した場合には、おおよそ以下の容量が必要となる。
VGA(0.3Mpixel) 640*480*24(RGB)*2面(ダブルバッファ)=14.7Mbit
WXGA(1.0MPixel) 1280*800*24(RGB)*2面(ダブルバッファ)=49.2MBit
【0007】
そのため、例えば、特許文献3には、フレームバッファへの格納データを工夫して上記の問題を解決する技術が開示されている。しかしながら、特許文献3に開示されている技術を用いても、必要容量は上記計算の2/3程度が必要であり、メガピクセルクラスの撮像素子を用いる場合には十分でない。そのため、実装するためには高価な大容量のRAM等が必要となる。
【発明の概要】
【発明が解決しようとする課題】
【0008】
本発明の課題は、高解像度画像を座標変換により変形処理する際のフレームバッファのメモリ容量とアクセススピードに関する上記問題を解決することにある。
【0009】
換言すれば、本発明は、大容量のメモリを使用することなく、また、メモリのアクセススピードを低下させることなく、高解像度画像の座標変換を可能とする画像処理装置及び画像処理方法を提供することにある。
【課題を解決するための手段】
【0010】
本発明の画像処理装置は、入力画像データを圧縮して圧縮画像データを生成する画像圧縮手段と、前記圧縮画像データを格納する記憶手段と、座標変換により画像を変形するための座標を計算して、その座標情報を出力する座標計算手段と、前記記憶手段に格納された前記圧縮画像データを、前記座標計算手段からの座標情報に基づいて座標変換して読み出すことで、圧縮変形画像データを生成する圧縮画像変形手段と、前記圧縮変形画像データを伸長する画像伸長手段を有し、前記画像圧縮手段は、前記入力画像データの少なくとも輝度信号(Y)について、M×Mピクセルのブロックに分割して、ブロック単位にウェーブレット変換し、該ウェーブレット変換後、量子化してビット数を削減することにより圧縮することを特徴とする。
【0011】
また、前記画像圧縮手段は、前記入力画像データの色信号(UV)については、YUV=4:1:1に変換して圧縮することを特徴としている。
【0012】
また、前記画像圧縮手段は、ウェーブレット変換のLL,HL,LH,HH成分のうち、HL,LH,HH成分のビット数を削減することを特徴としている。さらには、HH成分のビット数を一番削減することを特徴としている。
【0013】
また、本発明の画像処理装置は、前記画像伸長手段で伸長された少なくとも輝度信号のブロック単位の画像データについて、前記座標計算手段から出力される座標情報のブロック内座標情報に基づいてインターポレートするインターポレーターを更にすることを特徴としている。
【0014】
また、前記インターポレーターは、色信号についてはそのまま出力することを特徴としている。
【0015】
また、本発明の画像処理装置は、前記画像圧縮手段は、少なくとも輝度信号について、ブロック単位を所定ピクセルずらした圧縮画像データを更に生成して記憶手段に格納し、前記圧縮画像変形手段は、前記インターポレーターにてブロックの境界を考慮してインターポレートできるように、前記記憶手段から読み出す圧縮画像データを選択することを特徴としている。
【0016】
また、本発明の画像処理装置は、前記画像伸長手段の後段に、出力画像のサイズを変更する第二の画像伸長手段を更に有することを特徴としている。
【0017】
また、本発明の画像処理装置は、前記記憶手段に、書込みと読出しでアドレス空間を分けるダブルバッファ方式を用いることを特徴としている。
【0018】
本発明の画像処理方法の構成も、上記画像処理装置の構成と基本的に同様である。
【発明の効果】
【0019】
本発明によれば、圧縮画像をメモリに格納し、メモリから該圧縮画像を座標変換により変形しながら読み出すようにしたことにより、高解像度画像を座標変換して変形画像を生成する際に、大容量のメモリを不要とし、また、メモリのアクセススピードの低下を軽減することが可能になる。
【図面の簡単な説明】
【0020】
【図1】本発明の画像処理装置の一実施形態の全体構成図である。
【図2】座標変換による変形画像の生成原理を説明する図である。
【図3】本発明の画像圧縮及び画像伸長の具体的処理イメージを示す図である。
【図4】画面のブロック分割とメモリ格納の具体的イメージを示す図である。
【図5】インターポレーターの処理を説明する図である。
【図6】元画像と出力画像の具体例を示す図である。
【図7】ブロックの境界とインターポレート処理の関係を説明する図である。
【図8】ブロック単位を1ピクセルずらす前の画面を示す図である。
【図9】ブロック単位を1ピクセルずらした後の画面を示す図である。
【図10】2つの画像に対するメモリ空間の一例を示す図である。
【図11】ダブルバッファ方式の場合のメモリ空間の一例を示す図である。
【図12】本発明の画像処理装置の別の実施形態の全体構成図である。
【図13】図12の第二の画像伸長部での伸長処理を説明する図である。
【図14】画像表示装置の輝度信号の周波数特性を示す図である。
【発明を実施するための形態】
【0021】
以下、本発明の実施の形態について図面を参照して説明する。
【実施例1】
【0022】
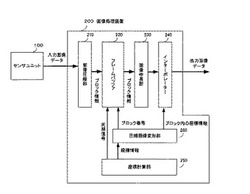
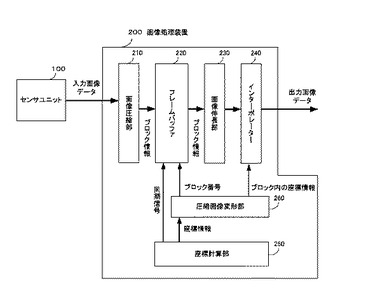
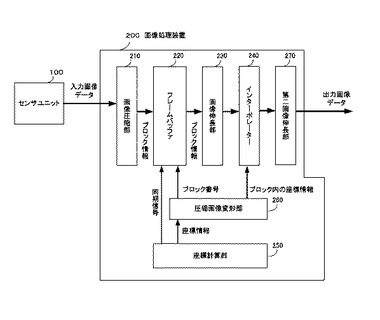
図1に、本発明の画像処理装置の一実施形態の全体構成図を示す。センサユニット100は、レンズ光学系、CCDやCMOSなどの撮像素子、A/D変換回路等のほかに画像処理部を有しており、被写体の光学像を電気信号に変換し、A/D変換した後、ベイヤ補間やYUV変換、シャープネスなどの処理を行って画像データを逐次出力する。画像処理装置200は、センサユニット100からの画像データ(YUVデータ)を逐次入力して、座標変換により歪み補正処理や視点変換処理などを行って変形画像を逐次出力する。本発明の特徴は、この画像処理装置200の構成・処理にある。これについては後述する。
【0023】
図では省略したが、画像処理装置200には表示装置が接続されて、画像処理装置200からの出力画像データは、そのまま又はNTSC方式の映像信号に変換されて表示装置に表示される。
【0024】
本実施例では画像処理装置200は、入力画像データ(YUVデータ)を圧縮処理して圧縮画像データを生成する画像圧縮部210、圧縮画像データを記憶するフレームバッファ220、該フレームバッファ200から読み出される圧縮画像データ(圧縮変形画像データ)を伸長処理する画像伸長部230、伸長された画像データを補間処理するインターポレーター240、座標変換により画像を変形するための座標を計算する座標計算部250、該座標計算部250からの出力情報(座標情報)に基づき、フレームバッファ220から圧縮画像データを読み出すことで圧縮変形画像データを生成する圧縮画像変形部200などで構成される。
【0025】
例えば、車載カメラシステムの場合、画像処理装置200はセンサユニット100と一体に筐体内に収納され、車の後方等に取り付けて使用される。センサユニット100からは画像データと共にクロック、水平及び垂直同期信号が出力される。なお、画像処理装置200がクロックや水平/垂直同期信号を生成して、当該装置内の各部及びイメージセンサ100に供給するようにしてもよい。
【0026】
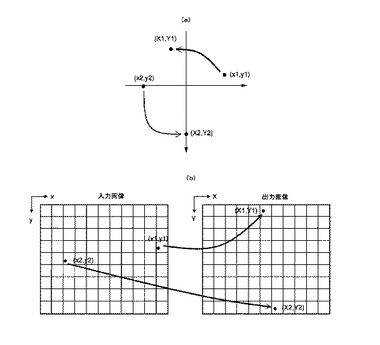
まず、変形画像の生成原理について説明する。変形画像は、撮像素子から出力される画像データ(入力画像)を一度フレームバッファにそのまま書込み、異なるアドレス(座標)から読み出すことで生成される。図2は、入力画像を90°回転変形した画像を生成する例を示したものである。図2(a)は、ある二つの画素の変換前と変換後の座標上の位置関係を示し、図2(b)は、フレームメモリに記憶された入力画像と出力画像の対応する画素の位置関係を示す。すなわち、フレームバッファから画像データを読み出す際に、出力画像上の座標(X1.Y1)の画素として、入力画像上の座標(x1,y1)の画素の画像データを読み出すようにする。また、出力画像上の座標(X2,Y2)の画素としては、入力画像上の座標(x2,y2)の画素の画像データを読み出すようする。これを入力画像の各画素について実施することで、出力画像として、入力画像を90°回転変形した画像を得ることができる。
【0027】
このようにして座標変換により画像を変形することにより、例えば車の後方部分を見るバックモニターなどにおいて、魚眼カメラの画像を変形し、魚眼画像に起因する画像の歪みを補正したり、視点変換に基づいて画像変形により真上から見た画像に変形したりして、ドライバーに見やすい画像を表示することができるようになる。
【0028】
ところで、先に述べたように、高解像度な撮像素子を用いた場合、フレームバッファに用いるメモリのアクセススピードの問題や、メモリ容量の問題が発生する。そこで、本発明では、画像データを圧縮した圧縮画像データをフレームバッファに格納し、座標変換により画像を変形する処理を圧縮画像データを用いて行うようにする。以下、本画像処理装置200の全体的動作を説明する。
【0029】
画像圧縮部210は、センサユニット100からの入力画像データ(YUVデータ)に対して、輝度信号(Y)はMXMピクセルのブロックに分割し、ブロック単位にウェーブレット変換を行い、その後、高周波成分のビット数を削減する量子化を行うことで、圧縮画像データ(非可逆圧縮画像)を生成する。また、色信号(UV)はそれぞれブロック単位に平均化処理を行うことで、圧縮画像データ(非可逆圧縮画像)を生成する。画像圧縮部210は、生成した圧縮画像データをフレームバッファ220に逐次格納していく。
【0030】
座標計算部250は、水平/垂直同期信号に基づき、座標変換により所望の歪み補正や視点変換の変形画像を生成するための座標を計算し、圧縮画像変形部260に出力する。具体的には、座標計算部250では、図2に示したように、フレームメモリからの画像データの読出しの際に、出力画像(変形画像)上の座標(X1,Y1),(X2,Y2)等の画素として、入力画像上の座標(x1,y1),(x2,y2)等の画素の画像データが読み出されるように、出力画像上の変換先座標に対応する入力画像上の変換元座標を計算する。
【0031】
通常、座標計算部250は、歪み補正、回転補正、見下ろし補正、その他、種々の画像変形のためにあらかじめ計算しておいた複数の座標変換テーブル(LUT)を有して、目的に応じて所望の座標変換テーブルを選択できるようになっている。したがって、座標計算部250は、実際には所望の座標変換テーブルを用い、該テーブルから水平/垂直同期信号に従って変換元座標を読み出して圧縮画像変形部260に出力する。これにより、出力画像の変換先座標に対応する入力画像の変換元座標を一々計算する必要がなくなる。
【0032】
圧縮画像変形部260は、座標計算部250から受け取った座標情報から、変換元座標が含まれるブロックを算出し、フレームバッファ220から当該ブロックの圧縮画像データを読み出す。また、圧縮画像変形部260は、インターポレーター240に対して、変換元座標がブロック内のどの位置に当たるかを示す情報(ブロック内座標情報)を出力する。
【0033】
画像伸長部230は、フレームバッファ220から読み出された圧縮画像データに対して、輝度信号(Y)は逆ウェーブレット変換を行って、ブロック単位にMXMピクセルの画像データに伸長する。色信号(UV)は、元の形式の画像データに伸長する。
【0034】
インターポレーター240は、画像伸長部230から出力される伸長画像データに対して、輝度信号(Y)は、圧縮画像変形部260から受け取ったブロック内の座標情報に基づき、バイリニアなどの方法でブロック内の目標座標の画素値を計算して出力する。色信号(UV)は、後述するように、それぞれ1ブロックで一つの情報しか持たないため、そのまま出力する。
【0035】
次に、具体的処理について説明する。ここでは、元々の画像データは、1ピクセル当たりYUV信号ともそれぞれ8ビットで構成されるとする。そして、センサユニット100からは、輝度信号(Y)は1ピクセル8ビットがそのまま出力され、色信号(UV)は、センサユニット100内でYUV=4:4:4がYUV=4:2:2に変換されて、UV信号それぞれ2ピクセル分8ビット(2画素の平均値)が出力されるとする。
【0036】
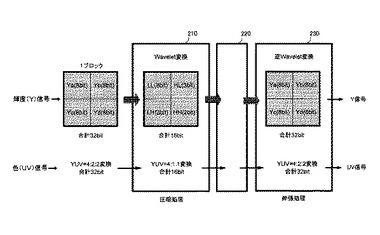
図3は、画像圧縮部210及び画像伸長部230での具体的な圧縮/伸長処理イメージを示したものである。ここで、1ブロックは2×2ピクセルとする。
【0037】
画像圧縮部230では、センサユニット100からの画像データに対して、輝度信号は、2×2ピクセルを1ブロックとして、ブロック単位にウェーブレット変換してLL,HL,LH,HH成分(ウェーブレット変換係数)を生成し、このうち、HL,LH,HHの高周波成分は量子化してビット数を削減する。具体的には、LL成分は8ビット、HLとLH成分は3ビット、HH成分は2ビットとする。したがって、輝度信号(Y)は、1ブロック当たり、32ビットが16ビットに圧縮される。一方、色信号(UV)は、1ブロック単位にYUV=4:2:2をYUV=4:1:1に変換する(2×2画素の平均値とする)。ここでは、変換後の色信号(UV)をそれぞれ8ビットとする。したがって、色信号(UV)も、1ブロック当たり、32ビットが16ビットに圧縮される。
【0038】
ここで、1ブロックの4ピクセルのY信号をa,b,c,dとすると、LL,HL,LH,HH成分はそれぞれ次のように計算される。
LL=(a+b+c+d)/4
HL=(a+c)/2−(b+d)/2
LH=(a+b)/2−(c+d)/2
HH=(a−b)−(c−d)
【0039】
画像伸長部230では、フレームバッファ220から読み出された圧縮変形画像データに対して、輝度信号(Y)は、ブロック単位に逆ウェーブレット変換を行って、1ブロック4ピクセルのデータをそれぞれ復元する。すなわち、1ピクセル8ビットずつ、1ブロック4ピクセルで合計32ビットに復元する。色信号(UV)は、元のYUV=4:2:2に変換する。すなわち、UV信号毎、2画素分8ビットずつ、1ブロックで合計32ビットに復元する。
【0040】
ここで、1ブロックの4ピクセルのY信号をa,b,c,dとすると、これらはLL,HL,LH,HH成分から次のように計算される。
a=(4×LL+2×HL+2×LH+HH)/4
b=(4×LL+2×HL−2×LH−HH)/4
c=(4×LL−2×HL+2×LH−HH)/4
d=(4×LL−2×HL−2×LH+HH)/4
【0041】
図3の例の場合、フレームバッファは、非圧縮状態(RGB各8ビット格納)では1ピクセル当たり24ビット必要とするデータ量が、4ピクセル当たり輝度情報16ビット,色情報16ビットで済むため、1ピクセルあたりは8ビットとなり1/3のデータ量で済む。また、フレームバッファへは、連続したメモリアドレスに高速にライトができるバーストライトが使用できる。一方、フレームバッファからは、出力1ピクセル分に対するリードが、1ブロック分の32ビットのデータ量を読み出すだけで周辺ピクセルを含む4ピクセル分を読み出すことが可能なため、これら周辺ピクセルを用いて座標変換の小数点部分を補間するXY方向のインターポレートを行うことが可能となり、高品質な座標変換が可能となる。
【0042】
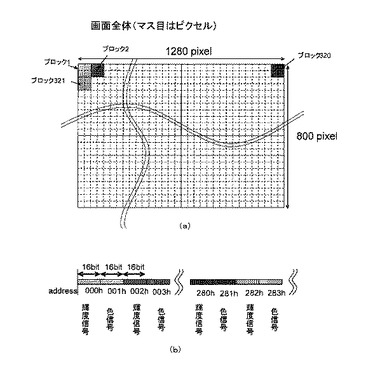
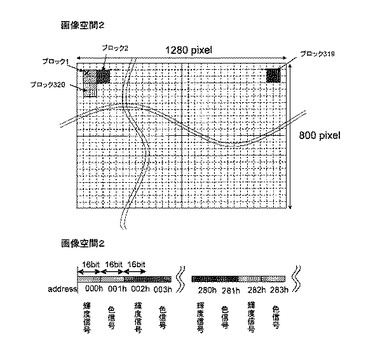
図4に、画面のブロック分割とメモリ格納方法の具体的イメージを示す。図4(a)は、1280×800ピクセルの画面を1ブロック、2×2ピクセルのブロックに分割することを示している。上記図3の例の場合、圧縮画像データは1ブロック当たり、輝度信号及び色信号はいずれも16ビットである。図3(b)に示すように、この1ブロックの輝度信号及び色信号は、フレームバッファ220の連続したアドレスに格納される(バーストライト)。また、フレームバッファ220からも、16ビット×2アドレスのバーストリードで、1ブロック分の32ビットのデータが読み出される。
【0043】
なお、フレームバッファ220は、メモリへの書込みと読出しが同時に同じフレームに行われないように、2画面分のメモリを備えて、書込みと読出しでアドレス空間を分ける、いわゆるダブルバッファ方式とすることでもよい。
【0044】
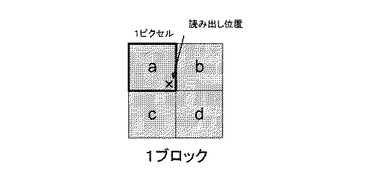
インターポレーター240では、輝度信号(Y)については、図5に示すように、1ブロック分の4ピクセルの伸長データa,b,c,dについて、バイリニア方法などを適用して、圧縮画像変形部260からのブロック内座標情報の読出し位置(例えば、X=0.2,Y=1.2)に応じて重み付け加重平均を計算し、その計算結果を出力する。色信号(UV)については、画像伸長部230からの伸長データがU,Vそれぞれ1ブロックで一つの色情報しか持たないため、伸長データをそのまま出力する。
【0045】
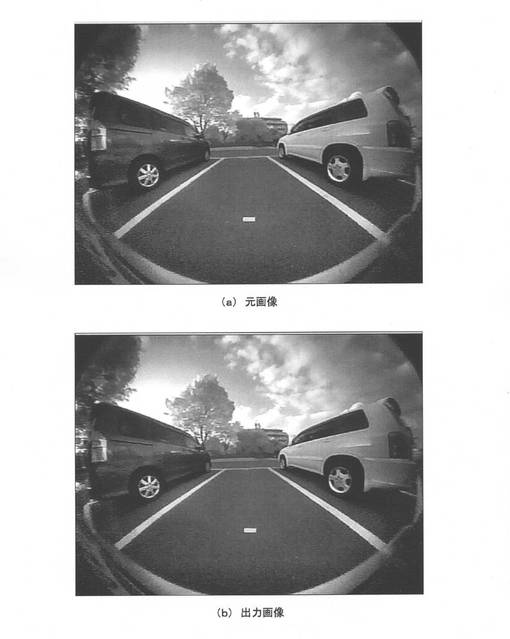
図6に、具体的画像例を示す。図6(a)は元画像、図6(b)は上記のようにして圧縮、伸長、インターポレートを行った出力画像の例である。元画像に対し、出力画像は、人間の目にはほぼ差が分からない品質となっている。
【実施例2】
【0046】
実施例1の構成・動作では、例えば図7の×印がついている位置の輝度情報を得ようとした場合には、ブロックの境目であるため、周辺4ピクセルの情報を1ブロックから得ることができず、インターポレートが行えない。
【0047】
そのため、本実施例では、画像圧縮部210を2重構成として、もう一方の画像圧縮部では、輝度信号について1ピクセルずらしてブロック分割してブロック単位の圧縮画像データを生成し、圧縮画像データのフレームバッファ220への書込み時に、通常処理による画像空間のほかに、該ブロックを1ピクセルずらした画像空間をもう一つメモリに書き込んでおき、取りだしたい座標位置にあわせて、どちらの画像空間から当該ブロックの圧縮画像データを読み出すかを圧縮画像変形部260が選択できるようにする。
【0048】
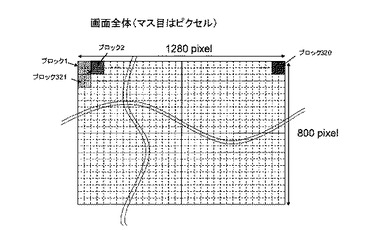
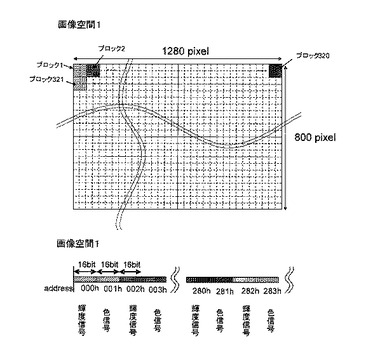
図8及び図9に本実施例の処理イメージを示す。ここで、図8は通常処理(実施例1に対応)の画像空間1であり、図9は1ピクセルずらした画像空間2である。図7の×印の場合、図9の画像空間2を用いることで、×印の周辺4ピクセルの輝度信号を1ブロックから得ることができ、インターポレートを確実に行うことが可能になる。
【0049】
本実施例では、画像圧縮手段は2つ、メモリ容量は倍必要になるものの、どの位置の座標を読み出際にもXY両方向にインターポレートが可能となる。なお、1ブロックが2×2以上の場合、例えば4×4の場合には、画像空間1と画像空間2とは1ピクセルオーバーラップさせればよい。
【0050】
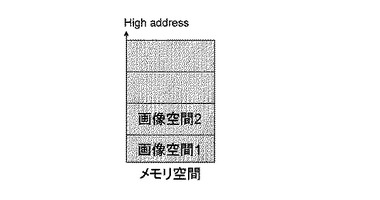
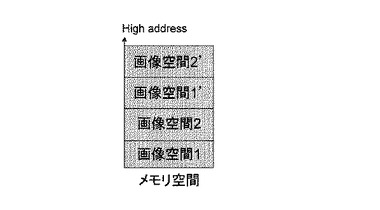
図10はメモリ上の画像空間1及び画像空間2の配置例を示した図である。もちろん、他の配置方法でもよい、また、ダブルバッファ方式の場合には、図11のように画像空間をメモリ上に4面もつこととなる。
【実施例3】
【0051】
図12に、本実施例の画像処理装置の全体構成図を示す。これはインターポレーター240の後段に第二の画像伸長部270を追加したもので、これ以外は図1と同じである。
【0052】
画像を変形するためには、メモリ(フレームメモリ)からランダムアクセスで画像データを読出す必要がある。一方、装置の低コスト化のためには、出来る限り安価なDRAMなどを使用する必要がある。しかしながら、安価なDRAMでは駆動周波数があまり速くないことからランダムアクセスのスピードが遅く、正規のNTSC出力のためには、必要なアドレス値を計算して、例えば、主走査線方向の所望ピクセルを読出すためには時間的に間に合わないことがある。
【0053】
そこで、本実施例では、フレームバッファ220から出力される主走査方向の読み出しピクセル数は、出力画面のピクセル数に対して小さい構成とする。例えば、フレームバッファ220からの主走査線方向の読み出しピクセル数は500ピクセル分と小さく読み出し、その後、第2画像伸長部270において、主走査線方向への伸長処理で720ピクセルに伸長する。
【0054】
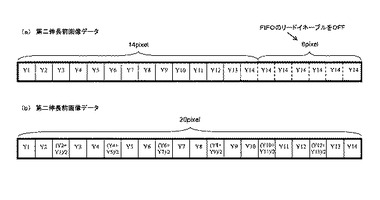
具体的には、第二画像伸長部270では、インターポレーター240から出力された1ライン当たり500ピクセルの画像データを例えばFIFOメモリに書込み、それを読出す。このFIFOメモリから読出すためのリードイネーブル信号を14クロック分HIGH、6クロック分LOWとして、14ピクセル分ずつ読出し、これを35回繰り返し、最後の1回は10クロック分HIGH、10クロック分LOWとして、1ライン当たり500ピクセルの画像データを読出す。図13(a)は、FIFOメモリから読出される1回当たりの画像データセットを示す。この画像データセットを図13(b)のように補間処理して伸長する。これを35+1回繰り返すことで、1ライン当たり500ピクセルの画像データは720ピクセルの画像データに伸長される。
【0055】
なお、図13は一例にすぎず、画面主走査方向に対して最終的に出力するのに必要なピクセル数が得られればよく、一般に伸長のやり方は種々の方法が考えられる。
【0056】
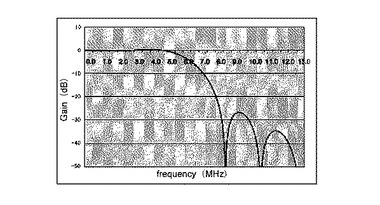
図14に画像表示装置の輝度信号の一般的な周波数特性を示す。ここで、NTSC信号の水平解像度を計算すると、8.0MHz/30fps/525line=507本である。図14により、1ライン当たり720ピクセルの画像データをメモリから読出したとしても、NTSCへの出力が律速となっており、500ピクセル程度でも劣化がほぼないことが分かる。
【実施例4】
【0057】
本実施例は、図1のインターポレーター240の後段や図12の第二画像伸長部270の後にオーバーレイ手段を設けるものである。車載カメラシステムにおいては、多数の車種に対応可能なように車幅線や距離線などのマーカーの一を変更することが可能となっている場合がある。オーバーレイ手段では、このような車幅線や距離線を出力画像に重畳するようにする。
【0058】
バックモニターなどの表示画面に車の車幅を示す車幅線や、車からの距離を示す距離線を表示することで、ドライバーの安全な駐車等を助けることが可能になる。
【符号の説明】
【0059】
100 センサユニット
200 画像処理装置
210 画像圧縮部
220 フレームバッファ
230 画像伸長部
240 インターポレーター
250 座標計算部
260 圧縮画像変形部
270 第二画像伸長部
【先行技術文献】
【特許文献】
【0060】
【特許文献1】特開2009−177703号公報
【特許文献2】特開2010− 81479号公報
【特許文献3】特開2008− 61172号公報
【技術分野】
【0001】
本発明は、座標変換により画像を変形処理する画像処理装置及び画像処理方法に関する。
【背景技術】
【0002】
近年、車の後ろ部分を見るバックモニターなどにおいて、魚眼カメラの画像を変形し、魚眼画像に起因する画像の歪みを補正したり、視点変換に基づいた画像変形により真上から見た画像に変形することにより、ドライバーに見やすい画像を表示する画像撮像システムが開発されている(例えば、特許文献1、特許文献2)。
【0003】
この種の画像撮像システムでは、画像の一部切り出し、また変形により上記の機能を実現するため、表示される画像は、撮像素子より出力された画像の一部を拡大したものとなる。そのため、近年ではその拡大された画像の細かい部分まで表現できるように、1Mピクセル以上のピクセル数を持つ高解像度な撮像素子が用いることが要望されている。
【0004】
しかしながら、高解像度な撮像素子を用いる場合には、
(1)フレームバッファに用いるメモリのアクセススピードの問題
(2)フレームバッファに用いるメモリ容量の問題
が発生する。
【0005】
上記(1)について云えば、座標変換にはフレームバッファのメモリアドレスへのランダムアクセスが必要であり、またフレームバッファに用いられるDRAMなどは、連続するアドレスをリードするバーストリードではスループットが大きいが、ランダムアクセスする場合にはスループットが激減する。そのため、高解像度ではリードのスピードが間に合わなくなり、座標変換が破綻する。さらに高画質に座標変換を行うためには、ピクセルの間を補間するインターポレートと行う必要があり、その場合には1ピクセルの出力に対して、周辺の2ピクセル(横方向のみインターポレートの場合)または4ピクセル(縦・横方向のインターポレートを行う場合)のデータをリードする必要があり、さらにリードのスループットが必要となる。
【0006】
また、上記(2)について云えば、高解像な撮像素子のデータを格納するため、低解像度な撮像素子の場合と比較して、大きなメモリ容量が問題となる。例えば1メガピクセルクラスの撮像素子を用いて、単純にRGB8ビットずつのデータを格納した場合には、おおよそ以下の容量が必要となる。
VGA(0.3Mpixel) 640*480*24(RGB)*2面(ダブルバッファ)=14.7Mbit
WXGA(1.0MPixel) 1280*800*24(RGB)*2面(ダブルバッファ)=49.2MBit
【0007】
そのため、例えば、特許文献3には、フレームバッファへの格納データを工夫して上記の問題を解決する技術が開示されている。しかしながら、特許文献3に開示されている技術を用いても、必要容量は上記計算の2/3程度が必要であり、メガピクセルクラスの撮像素子を用いる場合には十分でない。そのため、実装するためには高価な大容量のRAM等が必要となる。
【発明の概要】
【発明が解決しようとする課題】
【0008】
本発明の課題は、高解像度画像を座標変換により変形処理する際のフレームバッファのメモリ容量とアクセススピードに関する上記問題を解決することにある。
【0009】
換言すれば、本発明は、大容量のメモリを使用することなく、また、メモリのアクセススピードを低下させることなく、高解像度画像の座標変換を可能とする画像処理装置及び画像処理方法を提供することにある。
【課題を解決するための手段】
【0010】
本発明の画像処理装置は、入力画像データを圧縮して圧縮画像データを生成する画像圧縮手段と、前記圧縮画像データを格納する記憶手段と、座標変換により画像を変形するための座標を計算して、その座標情報を出力する座標計算手段と、前記記憶手段に格納された前記圧縮画像データを、前記座標計算手段からの座標情報に基づいて座標変換して読み出すことで、圧縮変形画像データを生成する圧縮画像変形手段と、前記圧縮変形画像データを伸長する画像伸長手段を有し、前記画像圧縮手段は、前記入力画像データの少なくとも輝度信号(Y)について、M×Mピクセルのブロックに分割して、ブロック単位にウェーブレット変換し、該ウェーブレット変換後、量子化してビット数を削減することにより圧縮することを特徴とする。
【0011】
また、前記画像圧縮手段は、前記入力画像データの色信号(UV)については、YUV=4:1:1に変換して圧縮することを特徴としている。
【0012】
また、前記画像圧縮手段は、ウェーブレット変換のLL,HL,LH,HH成分のうち、HL,LH,HH成分のビット数を削減することを特徴としている。さらには、HH成分のビット数を一番削減することを特徴としている。
【0013】
また、本発明の画像処理装置は、前記画像伸長手段で伸長された少なくとも輝度信号のブロック単位の画像データについて、前記座標計算手段から出力される座標情報のブロック内座標情報に基づいてインターポレートするインターポレーターを更にすることを特徴としている。
【0014】
また、前記インターポレーターは、色信号についてはそのまま出力することを特徴としている。
【0015】
また、本発明の画像処理装置は、前記画像圧縮手段は、少なくとも輝度信号について、ブロック単位を所定ピクセルずらした圧縮画像データを更に生成して記憶手段に格納し、前記圧縮画像変形手段は、前記インターポレーターにてブロックの境界を考慮してインターポレートできるように、前記記憶手段から読み出す圧縮画像データを選択することを特徴としている。
【0016】
また、本発明の画像処理装置は、前記画像伸長手段の後段に、出力画像のサイズを変更する第二の画像伸長手段を更に有することを特徴としている。
【0017】
また、本発明の画像処理装置は、前記記憶手段に、書込みと読出しでアドレス空間を分けるダブルバッファ方式を用いることを特徴としている。
【0018】
本発明の画像処理方法の構成も、上記画像処理装置の構成と基本的に同様である。
【発明の効果】
【0019】
本発明によれば、圧縮画像をメモリに格納し、メモリから該圧縮画像を座標変換により変形しながら読み出すようにしたことにより、高解像度画像を座標変換して変形画像を生成する際に、大容量のメモリを不要とし、また、メモリのアクセススピードの低下を軽減することが可能になる。
【図面の簡単な説明】
【0020】
【図1】本発明の画像処理装置の一実施形態の全体構成図である。
【図2】座標変換による変形画像の生成原理を説明する図である。
【図3】本発明の画像圧縮及び画像伸長の具体的処理イメージを示す図である。
【図4】画面のブロック分割とメモリ格納の具体的イメージを示す図である。
【図5】インターポレーターの処理を説明する図である。
【図6】元画像と出力画像の具体例を示す図である。
【図7】ブロックの境界とインターポレート処理の関係を説明する図である。
【図8】ブロック単位を1ピクセルずらす前の画面を示す図である。
【図9】ブロック単位を1ピクセルずらした後の画面を示す図である。
【図10】2つの画像に対するメモリ空間の一例を示す図である。
【図11】ダブルバッファ方式の場合のメモリ空間の一例を示す図である。
【図12】本発明の画像処理装置の別の実施形態の全体構成図である。
【図13】図12の第二の画像伸長部での伸長処理を説明する図である。
【図14】画像表示装置の輝度信号の周波数特性を示す図である。
【発明を実施するための形態】
【0021】
以下、本発明の実施の形態について図面を参照して説明する。
【実施例1】
【0022】
図1に、本発明の画像処理装置の一実施形態の全体構成図を示す。センサユニット100は、レンズ光学系、CCDやCMOSなどの撮像素子、A/D変換回路等のほかに画像処理部を有しており、被写体の光学像を電気信号に変換し、A/D変換した後、ベイヤ補間やYUV変換、シャープネスなどの処理を行って画像データを逐次出力する。画像処理装置200は、センサユニット100からの画像データ(YUVデータ)を逐次入力して、座標変換により歪み補正処理や視点変換処理などを行って変形画像を逐次出力する。本発明の特徴は、この画像処理装置200の構成・処理にある。これについては後述する。
【0023】
図では省略したが、画像処理装置200には表示装置が接続されて、画像処理装置200からの出力画像データは、そのまま又はNTSC方式の映像信号に変換されて表示装置に表示される。
【0024】
本実施例では画像処理装置200は、入力画像データ(YUVデータ)を圧縮処理して圧縮画像データを生成する画像圧縮部210、圧縮画像データを記憶するフレームバッファ220、該フレームバッファ200から読み出される圧縮画像データ(圧縮変形画像データ)を伸長処理する画像伸長部230、伸長された画像データを補間処理するインターポレーター240、座標変換により画像を変形するための座標を計算する座標計算部250、該座標計算部250からの出力情報(座標情報)に基づき、フレームバッファ220から圧縮画像データを読み出すことで圧縮変形画像データを生成する圧縮画像変形部200などで構成される。
【0025】
例えば、車載カメラシステムの場合、画像処理装置200はセンサユニット100と一体に筐体内に収納され、車の後方等に取り付けて使用される。センサユニット100からは画像データと共にクロック、水平及び垂直同期信号が出力される。なお、画像処理装置200がクロックや水平/垂直同期信号を生成して、当該装置内の各部及びイメージセンサ100に供給するようにしてもよい。
【0026】
まず、変形画像の生成原理について説明する。変形画像は、撮像素子から出力される画像データ(入力画像)を一度フレームバッファにそのまま書込み、異なるアドレス(座標)から読み出すことで生成される。図2は、入力画像を90°回転変形した画像を生成する例を示したものである。図2(a)は、ある二つの画素の変換前と変換後の座標上の位置関係を示し、図2(b)は、フレームメモリに記憶された入力画像と出力画像の対応する画素の位置関係を示す。すなわち、フレームバッファから画像データを読み出す際に、出力画像上の座標(X1.Y1)の画素として、入力画像上の座標(x1,y1)の画素の画像データを読み出すようにする。また、出力画像上の座標(X2,Y2)の画素としては、入力画像上の座標(x2,y2)の画素の画像データを読み出すようする。これを入力画像の各画素について実施することで、出力画像として、入力画像を90°回転変形した画像を得ることができる。
【0027】
このようにして座標変換により画像を変形することにより、例えば車の後方部分を見るバックモニターなどにおいて、魚眼カメラの画像を変形し、魚眼画像に起因する画像の歪みを補正したり、視点変換に基づいて画像変形により真上から見た画像に変形したりして、ドライバーに見やすい画像を表示することができるようになる。
【0028】
ところで、先に述べたように、高解像度な撮像素子を用いた場合、フレームバッファに用いるメモリのアクセススピードの問題や、メモリ容量の問題が発生する。そこで、本発明では、画像データを圧縮した圧縮画像データをフレームバッファに格納し、座標変換により画像を変形する処理を圧縮画像データを用いて行うようにする。以下、本画像処理装置200の全体的動作を説明する。
【0029】
画像圧縮部210は、センサユニット100からの入力画像データ(YUVデータ)に対して、輝度信号(Y)はMXMピクセルのブロックに分割し、ブロック単位にウェーブレット変換を行い、その後、高周波成分のビット数を削減する量子化を行うことで、圧縮画像データ(非可逆圧縮画像)を生成する。また、色信号(UV)はそれぞれブロック単位に平均化処理を行うことで、圧縮画像データ(非可逆圧縮画像)を生成する。画像圧縮部210は、生成した圧縮画像データをフレームバッファ220に逐次格納していく。
【0030】
座標計算部250は、水平/垂直同期信号に基づき、座標変換により所望の歪み補正や視点変換の変形画像を生成するための座標を計算し、圧縮画像変形部260に出力する。具体的には、座標計算部250では、図2に示したように、フレームメモリからの画像データの読出しの際に、出力画像(変形画像)上の座標(X1,Y1),(X2,Y2)等の画素として、入力画像上の座標(x1,y1),(x2,y2)等の画素の画像データが読み出されるように、出力画像上の変換先座標に対応する入力画像上の変換元座標を計算する。
【0031】
通常、座標計算部250は、歪み補正、回転補正、見下ろし補正、その他、種々の画像変形のためにあらかじめ計算しておいた複数の座標変換テーブル(LUT)を有して、目的に応じて所望の座標変換テーブルを選択できるようになっている。したがって、座標計算部250は、実際には所望の座標変換テーブルを用い、該テーブルから水平/垂直同期信号に従って変換元座標を読み出して圧縮画像変形部260に出力する。これにより、出力画像の変換先座標に対応する入力画像の変換元座標を一々計算する必要がなくなる。
【0032】
圧縮画像変形部260は、座標計算部250から受け取った座標情報から、変換元座標が含まれるブロックを算出し、フレームバッファ220から当該ブロックの圧縮画像データを読み出す。また、圧縮画像変形部260は、インターポレーター240に対して、変換元座標がブロック内のどの位置に当たるかを示す情報(ブロック内座標情報)を出力する。
【0033】
画像伸長部230は、フレームバッファ220から読み出された圧縮画像データに対して、輝度信号(Y)は逆ウェーブレット変換を行って、ブロック単位にMXMピクセルの画像データに伸長する。色信号(UV)は、元の形式の画像データに伸長する。
【0034】
インターポレーター240は、画像伸長部230から出力される伸長画像データに対して、輝度信号(Y)は、圧縮画像変形部260から受け取ったブロック内の座標情報に基づき、バイリニアなどの方法でブロック内の目標座標の画素値を計算して出力する。色信号(UV)は、後述するように、それぞれ1ブロックで一つの情報しか持たないため、そのまま出力する。
【0035】
次に、具体的処理について説明する。ここでは、元々の画像データは、1ピクセル当たりYUV信号ともそれぞれ8ビットで構成されるとする。そして、センサユニット100からは、輝度信号(Y)は1ピクセル8ビットがそのまま出力され、色信号(UV)は、センサユニット100内でYUV=4:4:4がYUV=4:2:2に変換されて、UV信号それぞれ2ピクセル分8ビット(2画素の平均値)が出力されるとする。
【0036】
図3は、画像圧縮部210及び画像伸長部230での具体的な圧縮/伸長処理イメージを示したものである。ここで、1ブロックは2×2ピクセルとする。
【0037】
画像圧縮部230では、センサユニット100からの画像データに対して、輝度信号は、2×2ピクセルを1ブロックとして、ブロック単位にウェーブレット変換してLL,HL,LH,HH成分(ウェーブレット変換係数)を生成し、このうち、HL,LH,HHの高周波成分は量子化してビット数を削減する。具体的には、LL成分は8ビット、HLとLH成分は3ビット、HH成分は2ビットとする。したがって、輝度信号(Y)は、1ブロック当たり、32ビットが16ビットに圧縮される。一方、色信号(UV)は、1ブロック単位にYUV=4:2:2をYUV=4:1:1に変換する(2×2画素の平均値とする)。ここでは、変換後の色信号(UV)をそれぞれ8ビットとする。したがって、色信号(UV)も、1ブロック当たり、32ビットが16ビットに圧縮される。
【0038】
ここで、1ブロックの4ピクセルのY信号をa,b,c,dとすると、LL,HL,LH,HH成分はそれぞれ次のように計算される。
LL=(a+b+c+d)/4
HL=(a+c)/2−(b+d)/2
LH=(a+b)/2−(c+d)/2
HH=(a−b)−(c−d)
【0039】
画像伸長部230では、フレームバッファ220から読み出された圧縮変形画像データに対して、輝度信号(Y)は、ブロック単位に逆ウェーブレット変換を行って、1ブロック4ピクセルのデータをそれぞれ復元する。すなわち、1ピクセル8ビットずつ、1ブロック4ピクセルで合計32ビットに復元する。色信号(UV)は、元のYUV=4:2:2に変換する。すなわち、UV信号毎、2画素分8ビットずつ、1ブロックで合計32ビットに復元する。
【0040】
ここで、1ブロックの4ピクセルのY信号をa,b,c,dとすると、これらはLL,HL,LH,HH成分から次のように計算される。
a=(4×LL+2×HL+2×LH+HH)/4
b=(4×LL+2×HL−2×LH−HH)/4
c=(4×LL−2×HL+2×LH−HH)/4
d=(4×LL−2×HL−2×LH+HH)/4
【0041】
図3の例の場合、フレームバッファは、非圧縮状態(RGB各8ビット格納)では1ピクセル当たり24ビット必要とするデータ量が、4ピクセル当たり輝度情報16ビット,色情報16ビットで済むため、1ピクセルあたりは8ビットとなり1/3のデータ量で済む。また、フレームバッファへは、連続したメモリアドレスに高速にライトができるバーストライトが使用できる。一方、フレームバッファからは、出力1ピクセル分に対するリードが、1ブロック分の32ビットのデータ量を読み出すだけで周辺ピクセルを含む4ピクセル分を読み出すことが可能なため、これら周辺ピクセルを用いて座標変換の小数点部分を補間するXY方向のインターポレートを行うことが可能となり、高品質な座標変換が可能となる。
【0042】
図4に、画面のブロック分割とメモリ格納方法の具体的イメージを示す。図4(a)は、1280×800ピクセルの画面を1ブロック、2×2ピクセルのブロックに分割することを示している。上記図3の例の場合、圧縮画像データは1ブロック当たり、輝度信号及び色信号はいずれも16ビットである。図3(b)に示すように、この1ブロックの輝度信号及び色信号は、フレームバッファ220の連続したアドレスに格納される(バーストライト)。また、フレームバッファ220からも、16ビット×2アドレスのバーストリードで、1ブロック分の32ビットのデータが読み出される。
【0043】
なお、フレームバッファ220は、メモリへの書込みと読出しが同時に同じフレームに行われないように、2画面分のメモリを備えて、書込みと読出しでアドレス空間を分ける、いわゆるダブルバッファ方式とすることでもよい。
【0044】
インターポレーター240では、輝度信号(Y)については、図5に示すように、1ブロック分の4ピクセルの伸長データa,b,c,dについて、バイリニア方法などを適用して、圧縮画像変形部260からのブロック内座標情報の読出し位置(例えば、X=0.2,Y=1.2)に応じて重み付け加重平均を計算し、その計算結果を出力する。色信号(UV)については、画像伸長部230からの伸長データがU,Vそれぞれ1ブロックで一つの色情報しか持たないため、伸長データをそのまま出力する。
【0045】
図6に、具体的画像例を示す。図6(a)は元画像、図6(b)は上記のようにして圧縮、伸長、インターポレートを行った出力画像の例である。元画像に対し、出力画像は、人間の目にはほぼ差が分からない品質となっている。
【実施例2】
【0046】
実施例1の構成・動作では、例えば図7の×印がついている位置の輝度情報を得ようとした場合には、ブロックの境目であるため、周辺4ピクセルの情報を1ブロックから得ることができず、インターポレートが行えない。
【0047】
そのため、本実施例では、画像圧縮部210を2重構成として、もう一方の画像圧縮部では、輝度信号について1ピクセルずらしてブロック分割してブロック単位の圧縮画像データを生成し、圧縮画像データのフレームバッファ220への書込み時に、通常処理による画像空間のほかに、該ブロックを1ピクセルずらした画像空間をもう一つメモリに書き込んでおき、取りだしたい座標位置にあわせて、どちらの画像空間から当該ブロックの圧縮画像データを読み出すかを圧縮画像変形部260が選択できるようにする。
【0048】
図8及び図9に本実施例の処理イメージを示す。ここで、図8は通常処理(実施例1に対応)の画像空間1であり、図9は1ピクセルずらした画像空間2である。図7の×印の場合、図9の画像空間2を用いることで、×印の周辺4ピクセルの輝度信号を1ブロックから得ることができ、インターポレートを確実に行うことが可能になる。
【0049】
本実施例では、画像圧縮手段は2つ、メモリ容量は倍必要になるものの、どの位置の座標を読み出際にもXY両方向にインターポレートが可能となる。なお、1ブロックが2×2以上の場合、例えば4×4の場合には、画像空間1と画像空間2とは1ピクセルオーバーラップさせればよい。
【0050】
図10はメモリ上の画像空間1及び画像空間2の配置例を示した図である。もちろん、他の配置方法でもよい、また、ダブルバッファ方式の場合には、図11のように画像空間をメモリ上に4面もつこととなる。
【実施例3】
【0051】
図12に、本実施例の画像処理装置の全体構成図を示す。これはインターポレーター240の後段に第二の画像伸長部270を追加したもので、これ以外は図1と同じである。
【0052】
画像を変形するためには、メモリ(フレームメモリ)からランダムアクセスで画像データを読出す必要がある。一方、装置の低コスト化のためには、出来る限り安価なDRAMなどを使用する必要がある。しかしながら、安価なDRAMでは駆動周波数があまり速くないことからランダムアクセスのスピードが遅く、正規のNTSC出力のためには、必要なアドレス値を計算して、例えば、主走査線方向の所望ピクセルを読出すためには時間的に間に合わないことがある。
【0053】
そこで、本実施例では、フレームバッファ220から出力される主走査方向の読み出しピクセル数は、出力画面のピクセル数に対して小さい構成とする。例えば、フレームバッファ220からの主走査線方向の読み出しピクセル数は500ピクセル分と小さく読み出し、その後、第2画像伸長部270において、主走査線方向への伸長処理で720ピクセルに伸長する。
【0054】
具体的には、第二画像伸長部270では、インターポレーター240から出力された1ライン当たり500ピクセルの画像データを例えばFIFOメモリに書込み、それを読出す。このFIFOメモリから読出すためのリードイネーブル信号を14クロック分HIGH、6クロック分LOWとして、14ピクセル分ずつ読出し、これを35回繰り返し、最後の1回は10クロック分HIGH、10クロック分LOWとして、1ライン当たり500ピクセルの画像データを読出す。図13(a)は、FIFOメモリから読出される1回当たりの画像データセットを示す。この画像データセットを図13(b)のように補間処理して伸長する。これを35+1回繰り返すことで、1ライン当たり500ピクセルの画像データは720ピクセルの画像データに伸長される。
【0055】
なお、図13は一例にすぎず、画面主走査方向に対して最終的に出力するのに必要なピクセル数が得られればよく、一般に伸長のやり方は種々の方法が考えられる。
【0056】
図14に画像表示装置の輝度信号の一般的な周波数特性を示す。ここで、NTSC信号の水平解像度を計算すると、8.0MHz/30fps/525line=507本である。図14により、1ライン当たり720ピクセルの画像データをメモリから読出したとしても、NTSCへの出力が律速となっており、500ピクセル程度でも劣化がほぼないことが分かる。
【実施例4】
【0057】
本実施例は、図1のインターポレーター240の後段や図12の第二画像伸長部270の後にオーバーレイ手段を設けるものである。車載カメラシステムにおいては、多数の車種に対応可能なように車幅線や距離線などのマーカーの一を変更することが可能となっている場合がある。オーバーレイ手段では、このような車幅線や距離線を出力画像に重畳するようにする。
【0058】
バックモニターなどの表示画面に車の車幅を示す車幅線や、車からの距離を示す距離線を表示することで、ドライバーの安全な駐車等を助けることが可能になる。
【符号の説明】
【0059】
100 センサユニット
200 画像処理装置
210 画像圧縮部
220 フレームバッファ
230 画像伸長部
240 インターポレーター
250 座標計算部
260 圧縮画像変形部
270 第二画像伸長部
【先行技術文献】
【特許文献】
【0060】
【特許文献1】特開2009−177703号公報
【特許文献2】特開2010− 81479号公報
【特許文献3】特開2008− 61172号公報
【特許請求の範囲】
【請求項1】
入力画像データを圧縮して圧縮画像データを生成する画像圧縮手段と、
前記圧縮画像データを格納する記憶手段と、
座標変換により画像を変形するための座標を計算し、その座標情報を出力する座標計算手段と、
前記記憶手段に格納された前記圧縮画像データを、前記座標計算手段からの座標情報に基づいて座標変換して読み出すことで、圧縮変形画像データを生成する圧縮画像変形手段と、
前記圧縮変形画像データを伸長する画像伸長手段とを有し、
前記画像圧縮手段は、前記入力画像データの少なくとも輝度信号(Y)について、M×Mピクセルのブロックに分割して、ブロック単位にウェーブレット変換し、該ウェーブレット変換後、量子化してビット数を削減することにより圧縮する、
ことを特徴とする画像処理装置。
【請求項2】
前記画像圧縮手段は、前記入力画像データの色信号(UV)については、YUV=4:1:1に変換して圧縮する、
ことを特徴とする請求項1に記載の画像処理装置。
【請求項3】
前記画像圧縮手段は、ウェーブレット変換のLL,HL,LH,HH成分のうち、HL,LH,HH成分のビット数を削減する、
ことを特徴とする請求項1もしくは2に記載の画像処理装置。
【請求項4】
前記画像圧縮手段は、前記HH成分のビット数を一番削減する、
ことを特徴とする請求項3に記載の画像処理装置。
【請求項5】
前記画像伸長手段で伸長された少なくとも輝度信号のブロック単位の画像データについて、前記座標計算手段から出力される座標情報のブロック内座標情報に基づいてインターポレートするインターポレーターを更に有する、
ことを特徴とする請求項1乃至4のいずれか1項に記載の画像処理装置。
【請求項6】
前記インターポレーターは、色信号についてはそのまま出力することを特徴とする請求項5に記載の画像処理装置。
【請求項7】
前記画像圧縮手段は、少なくとも輝度信号について、ブロック単位を所定ピクセルずらした圧縮画像データを更に生成して記憶手段に格納し、
前記圧縮画像変形手段は、前記インターポレーターにてブロックの境界を考慮してインターポレートできるように、前記記憶手段から読み出す圧縮画像データを選択する、
ことを特徴とする請求項5もしくは6に記載の画像処理装置。
【請求項8】
前記画像伸長手段の後段に、出力画像のサイズを変更する第二の画像伸長手段を更に有することを特徴とする請求項1乃至7のいずれか1項に記載の画像処理装置。
【請求項9】
前記記憶手段には、書込みと読出しでアドレス空間を分けるダブルバッファ方式が用いられることを特徴とする請求項1乃至8のいずれか1項に記載の画像処理装置。
【請求項10】
座標変換により画像を変形処理する画像処理方法であって、
入力画像データを圧縮して圧縮画像データを生成する画像圧縮ステップと、
前記圧縮画像データをメモリに格納する記憶ステップと、
座標変換により画像を変形するための座標を計算し、その座標情報を出力する座標計算ステップと、
前記メモリに格納された前記圧縮画像データを、前記座標情報に基づいて座標変換して読み出すことで、圧縮変形画像データを生成する圧縮画像変形ステップと、
前記圧縮変形画像データを伸長する画像伸長ステップを有し、
前記画像圧縮ステップは、前記入力画像データの少なくとも輝度信号(Y)について、M×Mピクセルのブロックに分割して、ブロック単位にウェーブレット変換し、該ウェーブレット変換後、量子化してビット数を削減することにより圧縮する、
ことを特徴とする画像処理方法。
【請求項11】
前記画像圧縮ステップは、前記入力画像データの色信号(UV)については、YUV=4:1:1に変換して圧縮する、
ことを特徴とする請求項10に記載の画像処理方法。
【請求項12】
前記画像圧縮ステップは、ウェーブレット変換のLL,HL,LH,HH成分のうち、HL,LH,HH成分のビット数を削減する、
ことを特徴とする請求項10もしくは11に記載の画像処理方法。
【請求項13】
前記画像圧縮ステップは、前記HH成分のビット数を一番削減する、
ことを特徴とする請求項12に記載の画像処理方法。
【請求項14】
前記画像伸長ステップで伸長された少なくとも輝度信号のブロック単位の画像データについて、前記座標情報のブロック内座標情報に基づいてインターポレートするインターポレートステップを更に有する、
ことを特徴とする請求項10乃至13のいずれか1項に記載の画像処理方法。
【請求項15】
前記インターポレートステップは、色信号についてはそのまま出力することを特徴とする請求項14に記載の画像処理方法。
【請求項16】
前記画像圧縮ステップは、少なくとも輝度信号について、ブロック単位を所定ピクセルずらした圧縮画像データを更に生成し、
前記記憶ステップは、通常の圧縮画像データと共に前記所定ピクセルずらした圧縮画像データをメモリに格納し、
前記圧縮画像変形ステップは、前記インターポレートステップにてブロックの境界を考慮してインターポレートできるように、前記メモリから読み出す圧縮画像データを選択する、
ことを特徴とする請求項14もしくは15に記載の画像処理方法。
【請求項17】
出力画像のサイズを変更する第二の画像伸長ステップを更に有することを特徴とする請求項10乃至16のいずれか1項に記載の画像処理方法。
【請求項1】
入力画像データを圧縮して圧縮画像データを生成する画像圧縮手段と、
前記圧縮画像データを格納する記憶手段と、
座標変換により画像を変形するための座標を計算し、その座標情報を出力する座標計算手段と、
前記記憶手段に格納された前記圧縮画像データを、前記座標計算手段からの座標情報に基づいて座標変換して読み出すことで、圧縮変形画像データを生成する圧縮画像変形手段と、
前記圧縮変形画像データを伸長する画像伸長手段とを有し、
前記画像圧縮手段は、前記入力画像データの少なくとも輝度信号(Y)について、M×Mピクセルのブロックに分割して、ブロック単位にウェーブレット変換し、該ウェーブレット変換後、量子化してビット数を削減することにより圧縮する、
ことを特徴とする画像処理装置。
【請求項2】
前記画像圧縮手段は、前記入力画像データの色信号(UV)については、YUV=4:1:1に変換して圧縮する、
ことを特徴とする請求項1に記載の画像処理装置。
【請求項3】
前記画像圧縮手段は、ウェーブレット変換のLL,HL,LH,HH成分のうち、HL,LH,HH成分のビット数を削減する、
ことを特徴とする請求項1もしくは2に記載の画像処理装置。
【請求項4】
前記画像圧縮手段は、前記HH成分のビット数を一番削減する、
ことを特徴とする請求項3に記載の画像処理装置。
【請求項5】
前記画像伸長手段で伸長された少なくとも輝度信号のブロック単位の画像データについて、前記座標計算手段から出力される座標情報のブロック内座標情報に基づいてインターポレートするインターポレーターを更に有する、
ことを特徴とする請求項1乃至4のいずれか1項に記載の画像処理装置。
【請求項6】
前記インターポレーターは、色信号についてはそのまま出力することを特徴とする請求項5に記載の画像処理装置。
【請求項7】
前記画像圧縮手段は、少なくとも輝度信号について、ブロック単位を所定ピクセルずらした圧縮画像データを更に生成して記憶手段に格納し、
前記圧縮画像変形手段は、前記インターポレーターにてブロックの境界を考慮してインターポレートできるように、前記記憶手段から読み出す圧縮画像データを選択する、
ことを特徴とする請求項5もしくは6に記載の画像処理装置。
【請求項8】
前記画像伸長手段の後段に、出力画像のサイズを変更する第二の画像伸長手段を更に有することを特徴とする請求項1乃至7のいずれか1項に記載の画像処理装置。
【請求項9】
前記記憶手段には、書込みと読出しでアドレス空間を分けるダブルバッファ方式が用いられることを特徴とする請求項1乃至8のいずれか1項に記載の画像処理装置。
【請求項10】
座標変換により画像を変形処理する画像処理方法であって、
入力画像データを圧縮して圧縮画像データを生成する画像圧縮ステップと、
前記圧縮画像データをメモリに格納する記憶ステップと、
座標変換により画像を変形するための座標を計算し、その座標情報を出力する座標計算ステップと、
前記メモリに格納された前記圧縮画像データを、前記座標情報に基づいて座標変換して読み出すことで、圧縮変形画像データを生成する圧縮画像変形ステップと、
前記圧縮変形画像データを伸長する画像伸長ステップを有し、
前記画像圧縮ステップは、前記入力画像データの少なくとも輝度信号(Y)について、M×Mピクセルのブロックに分割して、ブロック単位にウェーブレット変換し、該ウェーブレット変換後、量子化してビット数を削減することにより圧縮する、
ことを特徴とする画像処理方法。
【請求項11】
前記画像圧縮ステップは、前記入力画像データの色信号(UV)については、YUV=4:1:1に変換して圧縮する、
ことを特徴とする請求項10に記載の画像処理方法。
【請求項12】
前記画像圧縮ステップは、ウェーブレット変換のLL,HL,LH,HH成分のうち、HL,LH,HH成分のビット数を削減する、
ことを特徴とする請求項10もしくは11に記載の画像処理方法。
【請求項13】
前記画像圧縮ステップは、前記HH成分のビット数を一番削減する、
ことを特徴とする請求項12に記載の画像処理方法。
【請求項14】
前記画像伸長ステップで伸長された少なくとも輝度信号のブロック単位の画像データについて、前記座標情報のブロック内座標情報に基づいてインターポレートするインターポレートステップを更に有する、
ことを特徴とする請求項10乃至13のいずれか1項に記載の画像処理方法。
【請求項15】
前記インターポレートステップは、色信号についてはそのまま出力することを特徴とする請求項14に記載の画像処理方法。
【請求項16】
前記画像圧縮ステップは、少なくとも輝度信号について、ブロック単位を所定ピクセルずらした圧縮画像データを更に生成し、
前記記憶ステップは、通常の圧縮画像データと共に前記所定ピクセルずらした圧縮画像データをメモリに格納し、
前記圧縮画像変形ステップは、前記インターポレートステップにてブロックの境界を考慮してインターポレートできるように、前記メモリから読み出す圧縮画像データを選択する、
ことを特徴とする請求項14もしくは15に記載の画像処理方法。
【請求項17】
出力画像のサイズを変更する第二の画像伸長ステップを更に有することを特徴とする請求項10乃至16のいずれか1項に記載の画像処理方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図6】
【図2】
【図3】
【図4】
【図5】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図6】
【公開番号】特開2012−199608(P2012−199608A)
【公開日】平成24年10月18日(2012.10.18)
【国際特許分類】
【出願番号】特願2011−60553(P2011−60553)
【出願日】平成23年3月18日(2011.3.18)
【出願人】(000006747)株式会社リコー (37,907)
【Fターム(参考)】
【公開日】平成24年10月18日(2012.10.18)
【国際特許分類】
【出願日】平成23年3月18日(2011.3.18)
【出願人】(000006747)株式会社リコー (37,907)
【Fターム(参考)】
[ Back to top ]