
画像処理装置及び監視システム及び画像処理方法及び画像処理プログラム
【課題】合成開口レーダの観測信号を迅速に画像化する。
【解決手段】画像処理装置200は、例えば地上局110a等、地上の1つの地点や、例えば海上保安船110b等、海上を移動する船舶に搭載される。それぞれの画像処理装置200にて、受信部202は、衛星101に搭載された合成開口レーダから送信される電波が海面で反射した散乱波をアンテナ201により受信する。画像処理部203は、受信部202により受信された散乱波から海面のレーダ画像を生成する。物体抽出部204は、画像処理部203により生成されたレーダ画像を解析して海面に存在する船舶102を抽出する。送信部205は、画像処理部203により生成されたレーダ画像や物体抽出部204による船舶102の抽出結果を監視端末300に送信する。
【解決手段】画像処理装置200は、例えば地上局110a等、地上の1つの地点や、例えば海上保安船110b等、海上を移動する船舶に搭載される。それぞれの画像処理装置200にて、受信部202は、衛星101に搭載された合成開口レーダから送信される電波が海面で反射した散乱波をアンテナ201により受信する。画像処理部203は、受信部202により受信された散乱波から海面のレーダ画像を生成する。物体抽出部204は、画像処理部203により生成されたレーダ画像を解析して海面に存在する船舶102を抽出する。送信部205は、画像処理部203により生成されたレーダ画像や物体抽出部204による船舶102の抽出結果を監視端末300に送信する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、画像処理装置及び監視システム及び画像処理方法及び画像処理プログラムに関するものである。本発明は、特に、バイスタティック合成開口レーダによる広域沿岸監視システムに関するものである。
【背景技術】
【0002】
従来技術として、海上を観測したSAR(合成開口レーダ)画像から、画像の輝度が一定の閾値以上のものを船舶として検出するものがあった(例えば、特許文献1〜4参照)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2001−4398号公報
【特許文献2】特開2000−67400号公報
【特許文献3】特開平11−281739号公報
【特許文献4】特表平9−507582号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
衛星搭載の合成開口レーダは昼夜問わずに観測可能なことから沿岸の不審船等の監視に最適なセンサである。しかしながら、衛星と地上局との間の通信速度が低いため、観測信号を地上局へ転送する際のデータ容量に制限があり、これが観測可能な領域の広さや分解能を制限する。また、観測→地上局へのデータ転送→地上における画像処理・解析→関係部署への情報通知というルートを経るため、センサにて得られた不審船等に関する情報が、その情報を必要とする部署へ通知されるまでに時間を要する。その時間は、場合によっては1日以上ということもあるため、合成開口レーダを広域沿岸監視システム等に十分に活用することが困難であった。
【0005】
本発明は、例えば、合成開口レーダの観測信号を迅速に画像化することを目的とする。
【課題を解決するための手段】
【0006】
本発明の一の態様に係る画像処理装置は、
飛行体の飛行高度より低い位置に設置されるアンテナと、
前記飛行体に搭載された合成開口レーダから送信される電波が観測対象領域で反射した散乱波を前記アンテナにより受信する受信部と、
前記受信部により受信された散乱波から前記観測対象領域のレーダ画像を生成する画像処理部とを備えることを特徴とする。
【0007】
前記飛行体は、地球を周回する衛星と地球上空を飛行する航空機とのいずれかであり、
前記アンテナは、地球上の少なくとも1つの地点に設置されることを特徴とする。
【0008】
前記飛行体は、地球を周回する衛星と地球上空を飛行する航空機とのいずれかであり、
前記アンテナは、地球上を移動する少なくとも1つの移動体に搭載されることを特徴とする。
【0009】
前記飛行体は、地球を周回する衛星であり、
前記アンテナは、地球上空を飛行する少なくとも1つの航空機に搭載されることを特徴とする。
【0010】
前記画像処理装置は、さらに、前記画像処理部により生成されたレーダ画像を解析して前記観測対象領域に存在する特定の物体を抽出する物体抽出部を備えることを特徴とする。
【0011】
前記観測対象領域は、海面を含み、
前記物体抽出部は、前記特定の物体として船舶を抽出することを特徴とする。
【0012】
本発明の一の態様に係る監視システムは、
画像処理装置を複数備えるとともに、
それぞれの画像処理装置により生成されたレーダ画像を結合し、1つのレーダ画像として画面に表示する監視端末を備えることを特徴とする。
【0013】
本発明の一の態様に係る画像処理方法は、
画像処理装置の受信部が、飛行体に搭載された合成開口レーダから送信される電波が観測対象領域で反射した散乱波を、前記飛行体の飛行高度より低い位置に設置されるアンテナにより受信し、
前記画像処理装置の画像処理部が、前記受信部により受信された散乱波から前記観測対象領域のレーダ画像を生成することを特徴とする。
【0014】
本発明の一の態様に係る画像処理プログラムは、
飛行体に搭載された合成開口レーダから送信される電波が観測対象領域で反射した散乱波を、前記飛行体の飛行高度より低い位置に設置されるアンテナにより受信する受信処理と、
前記受信処理により受信された散乱波から前記観測対象領域のレーダ画像を生成する画像処理とをコンピュータに実行させることを特徴とする。
【0015】
前記受信処理は、地球を周回する衛星と地球上空を飛行する航空機とのいずれかに搭載された合成開口レーダから送信される電波が観測対象領域で反射した散乱波を、地球上の少なくとも1つの地点に設置されるアンテナにより受信することを特徴とする。
【0016】
前記受信処理は、地球を周回する衛星と地球上空を飛行する航空機とのいずれかに搭載された合成開口レーダから送信される電波が観測対象領域で反射した散乱波を、地球上を移動する少なくとも1つの移動体に搭載されるアンテナにより受信することを特徴とする。
【0017】
前記受信処理は、地球を周回する衛星に搭載された合成開口レーダから送信される電波が観測対象領域で反射した散乱波を、地球上空を飛行する少なくとも1つの航空機に搭載されるアンテナにより受信することを特徴とする。
【0018】
前記画像処理プログラムは、さらに、前記画像処理により生成されたレーダ画像を解析して前記観測対象領域に存在する特定の物体を抽出する物体抽出処理をコンピュータに実行させることを特徴とする。
【0019】
前記観測対象領域は、海面を含み、
前記物体抽出処理は、前記特定の物体として船舶を抽出することを特徴とする。
【発明の効果】
【0020】
本発明の一の態様によれば、画像処理装置が、飛行体に搭載された合成開口レーダにより得られる散乱波を、飛行体の飛行高度より低い位置に設置されるアンテナにより受信するため、合成開口レーダにより得られる散乱波を迅速に画像化することが可能となる。
【図面の簡単な説明】
【0021】
【図1】実施の形態1に係る広域沿岸監視システムの構成を示すブロック図である。
【図2】実施の形態1に係る画像処理装置のハードウェア構成の一例を示す図である。
【図3】実施の形態1に係る(a)画像処理装置の動作、(b)監視端末の動作を示すフローチャートである。
【図4】実施の形態1に係るアンテナの高さと観測範囲との関係を示すグラフである。
【発明を実施するための形態】
【0022】
以下、本発明の実施の形態について、図を用いて説明する。
【0023】
実施の形態1.
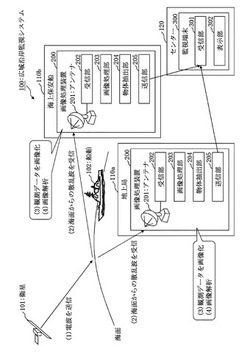
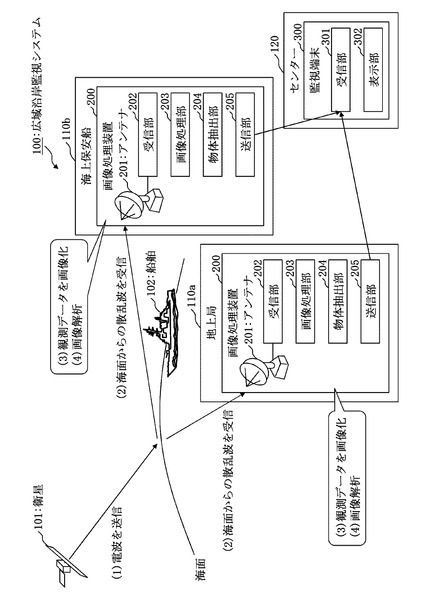
図1は、本実施の形態に係る広域沿岸監視システム100(監視システムの一例)の構成を示すブロック図である。
【0024】
図1において、広域沿岸監視システム100は、多数の画像処理装置200と、少なくとも1つの監視端末300とを備える。
【0025】
それぞれの画像処理装置200は、アンテナ201を具備する。アンテナ201は、合成開口レーダが搭載された衛星101(飛行体の一例)の飛行高度より低い位置に設置される。具体的には、アンテナ201は、例えば地上局110a等、地上(地球上の一例)の1つの地点に設置される。アンテナ201は、地上に限らず、海上やその他の地球上の1つ以上の地点に設置されてもよい。また、アンテナ201は、例えば海上保安船110b等、海上(地球上の一例)を移動する船舶(移動体の一例)に搭載される。アンテナ201は、海上を移動する船舶に限らず、地上を移動する車両等の移動体やその他の地球上を移動する1つ以上の移動体に搭載されてもよい。また、図示していないが、アンテナ201は、地球上空を飛行する航空機に搭載されてもよい。
【0026】
それぞれの画像処理装置200は、受信部202、画像処理部203、物体抽出部204、送信部205を備える。受信部202は、地球を周回する衛星101に搭載された合成開口レーダから送信される電波が海面(観測対象領域の一例)で反射した散乱波をアンテナ201により受信する。画像処理部203は、受信部202により受信された散乱波から海面のレーダ画像を生成する。物体抽出部204は、画像処理部203により生成されたレーダ画像を解析して海面に存在する船舶102(特定の物体の一例)を抽出する。送信部205は、画像処理部203により生成されたレーダ画像や物体抽出部204による船舶102の抽出結果を監視端末300に送信する。
【0027】
なお、本実施の形態では、画像処理装置200全体がアンテナ201と同じ場所に設置されているが、アンテナ201及び受信部202を受信機として、画像処理装置200のその他の部分(即ち、画像処理部203、物体抽出部204、送信部205を含む画像処理装置200の本体)と別の場所に設置してもよい。このとき、1つの画像処理装置200の本体に対して、複数の受信機を設置してもよい。例えば、海上保安船110b等、海上を移動する複数の船舶に受信機を搭載し、地上局110a等、地上の少なくとも1つの地点に当該受信機と通信可能な画像処理装置200の本体を設置してもよい。この場合、画像処理部203、物体抽出部204、送信部205の処理を少数箇所でまとめて行うことができるため、処理効率が向上する。また、受信機の設置数に対して、画像処理装置200の本体の設置数を減らすことができるため、コストが削減できる。
【0028】
また、本実施の形態では、受信部202が海面からの散乱波をアンテナ201により受信するが、受信部202が地表等、他の観測対象領域からの散乱波をアンテナ201により受信するようにしてもよい。受信部202が地表からの散乱波をアンテナ201により受信する場合、画像処理部203は、受信部202により受信された散乱波から地表のレーダ画像を生成する。そして、物体抽出部204は、画像処理部203により生成されたレーダ画像を解析して、例えば地表に存在する車両等の移動体(特定の物体の一例)を抽出する。送信部205は、画像処理部203により生成されたレーダ画像や物体抽出部204による移動体の抽出結果を監視端末300に送信する。
【0029】
監視端末300は、例えば地上や海上(地球上の一例)に敷設されるセンター120に設置される。なお、監視端末300は、それぞれの画像処理装置200と同じ場所に設置されてもよい。よって、監視端末300は、例えば地上局110aや海上保安船110bに設置されてもよい。
【0030】
監視端末300は、受信部301、表示部302を備える。受信部301は、それぞれの画像処理装置200の送信部205により送信されたレーダ画像や船舶102の抽出結果を受信する。表示部302は、受信部301により受信されたレーダ画像を結合し、1つのレーダ画像として画面に表示する。また、表示部302は、受信部301により受信された船舶102の抽出結果を画面に表示する。
【0031】
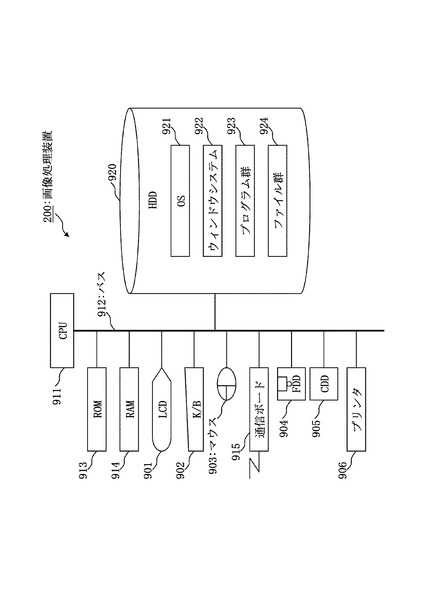
図2は、画像処理装置200のハードウェア構成の一例を示す図である。なお、監視端末300のハードウェア構成についても、本例と同様のものを採用することができる。
【0032】
図2において、画像処理装置200は、コンピュータであり、LCD901(Liquid・Crystal・Display)、キーボード902(K/B)、マウス903、FDD904(Flexible・Disk・Drive)、CDD905(Compact・Disc・Drive)、プリンタ906といったハードウェアデバイスを備えている。これらのハードウェアデバイスはケーブルや信号線で接続されている。LCD901の代わりに、CRT(Cathode・Ray・Tube)、あるいは、その他の表示装置が用いられてもよい。マウス903の代わりに、タッチパネル、タッチパッド、トラックボール、ペンタブレット、あるいは、その他のポインティングデバイスが用いられてもよい。
【0033】
画像処理装置200は、プログラムを実行するCPU911(Central・Processing・Unit)を備えている。CPU911は、処理装置の一例である。CPU911は、バス912を介してROM913(Read・Only・Memory)、RAM914(Random・Access・Memory)、通信ボード915、LCD901、キーボード902、マウス903、FDD904、CDD905、プリンタ906、HDD920(Hard・Disk・Drive)と接続され、これらのハードウェアデバイスを制御する。HDD920の代わりに、フラッシュメモリ、光ディスク装置、メモリカードリーダライタ又はその他の記憶媒体が用いられてもよい。
【0034】
RAM914は、揮発性メモリの一例である。ROM913、FDD904、CDD905、HDD920は、不揮発性メモリの一例である。これらは、記憶装置の一例である。通信ボード915、キーボード902、マウス903、FDD904、CDD905は、入力装置の一例である。また、通信ボード915、LCD901、プリンタ906は、出力装置の一例である。
【0035】
通信ボード915は、LAN(Local・Area・Network)等に接続されている。通信ボード915は、LANに限らず、IP−VPN(Internet・Protocol・Virtual・Private・Network)、広域LAN、ATM(Asynchronous・Transfer・Mode)ネットワークといったWAN(Wide・Area・Network)、あるいは、インターネットに接続されていても構わない。LAN、WAN、インターネットは、ネットワークの一例である。
【0036】
HDD920には、オペレーティングシステム921(OS)、ウィンドウシステム922、プログラム群923、ファイル群924が記憶されている。プログラム群923のプログラムは、CPU911、オペレーティングシステム921、ウィンドウシステム922により実行される。プログラム群923には、本実施の形態の説明において「〜部」として説明する機能を実行するプログラムが含まれている。プログラムは、CPU911により読み出され実行される。ファイル群924には、本実施の形態の説明において、「〜データ」、「〜情報」、「〜ID(識別子)」、「〜フラグ」、「〜結果」として説明するデータや情報や信号値や変数値やパラメータが、「〜ファイル」や「〜データベース」や「〜テーブル」の各項目として含まれている。「〜ファイル」や「〜データベース」や「〜テーブル」は、RAM914やHDD920等の記憶媒体に記憶される。RAM914やHDD920等の記憶媒体に記憶されたデータや情報や信号値や変数値やパラメータは、読み書き回路を介してCPU911によりメインメモリやキャッシュメモリに読み出され、抽出、検索、参照、比較、演算、計算、制御、出力、印刷、表示といったCPU911の処理(動作)に用いられる。抽出、検索、参照、比較、演算、計算、制御、出力、印刷、表示といったCPU911の処理中、データや情報や信号値や変数値やパラメータは、メインメモリやキャッシュメモリやバッファメモリに一時的に記憶される。
【0037】
本実施の形態の説明において用いるブロック図やフローチャートの矢印の部分は主としてデータや信号の入出力を示す。データや信号は、RAM914等のメモリ、FDD904のフレキシブルディスク(FD)、CDD905のコンパクトディスク(CD)、HDD920の磁気ディスク、光ディスク、DVD(Digital・Versatile・Disc)、あるいは、その他の記録媒体に記録される。また、データや信号は、バス912、信号線、ケーブル、あるいは、その他の伝送媒体により伝送される。
【0038】
本実施の形態の説明において「〜部」として説明するものは、「〜回路」、「〜装置」、「〜機器」であってもよく、また、「〜ステップ」、「〜工程」、「〜手順」、「〜処理」であってもよい。即ち、「〜部」として説明するものは、ROM913に記憶されたファームウェアで実現されていても構わない。あるいは、「〜部」として説明するものは、ソフトウェアのみ、あるいは、素子、デバイス、基板、配線といったハードウェアのみで実現されていても構わない。あるいは、「〜部」として説明するものは、ソフトウェアとハードウェアとの組み合わせ、あるいは、ソフトウェアとハードウェアとファームウェアとの組み合わせで実現されていても構わない。ファームウェアとソフトウェアは、プログラムとして、フレキシブルディスク、コンパクトディスク、磁気ディスク、光ディスク、DVD等の記録媒体に記憶される。プログラムはCPU911により読み出され、CPU911により実行される。即ち、プログラムは、本実施の形態の説明で述べる「〜部」としてコンピュータを機能させるものである。あるいは、プログラムは、本実施の形態の説明で述べる「〜部」の手順や方法をコンピュータに実行させるものである。
【0039】
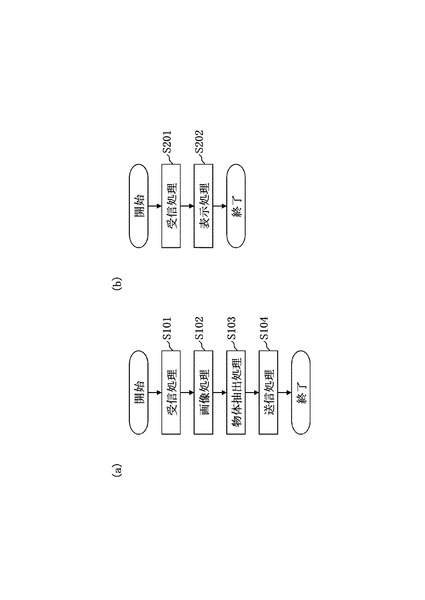
図3(a)は、画像処理装置200の動作(本実施の形態に係る画像処理方法、本実施の形態に係る画像処理プログラムの処理手順)を示すフローチャートである。
【0040】
ステップS101(受信処理)において、受信部202は、衛星101に搭載された合成開口レーダから送信される電波が海面で反射した散乱波をアンテナ201により受信する。そして、受信部202は、受信した散乱波のデータを画像処理部203に渡す。
【0041】
ステップS102(画像処理)において、画像処理部203は、ステップS101で渡された散乱波のデータに対し、レンジ圧縮及びアジマス圧縮処理を処理装置(例えば、CPU911)により実行してSLC(Single・Look・Complex)を生成する。即ち、画像処理部203は、海面からの散乱波から海面のレーダ画像を生成する。
【0042】
ステップS103(物体抽出処理)において、物体抽出部204は、例えば記憶装置(例えば、HDD920)に予め格納されている閾値を読み出す。この閾値は、レーダ画像の輝度値の閾値であり、海面のレーダ画像から船舶102を検出するためのものである。物体抽出部204は、ステップS102で生成されたレーダ画像を処理装置により解析して、読み出した閾値以上の輝度値をもつ部分を抽出する。そして、物体抽出部204は、抽出した部分が海面に存在する船舶102であると判断する。
【0043】
物体抽出部204は、さらに、レーダ画像から抽出した船舶102が不審船であるか否かを判断してもよい。この場合、例えば海上を移動する船舶の大きさ、形状、移動ルート(時刻と位置との組み合わせ)といった、個別の船舶に関する情報を記憶装置に予め格納しておく。物体抽出部204は、レーダ画像から抽出した船舶102に関する情報を検索し、当該情報が記憶装置に格納されていない場合、その船舶102が不審船であると処理装置により判断する。あるいは、物体抽出部204は、AIS(Automatic・Identification・System)の信号を送信していない船舶102を不審船であると判断してもよい。
【0044】
ステップS104(送信処理)において、送信部205は、ステップS103で生成されたレーダ画像やステップS103における船舶102の抽出結果を、ネットワーク等を介して監視端末300に送信する。
【0045】
図3(b)は、監視端末300の動作(本実施の形態に係る監視方法、本実施の形態に係る監視プログラムの処理手順)を示すフローチャートである。
【0046】
ステップS201(受信処理)において、受信部301は、それぞれの画像処理装置200から、ネットワーク等を介してレーダ画像や船舶102の抽出結果を受信する。
【0047】
ステップS202(表示処理)において、表示部302は、ステップS201で受信されたレーダ画像を処理装置(例えば、CPU)により結合し、1つのレーダ画像として出力装置により画面に表示する。また、表示部302は、ステップS201で受信された船舶102の抽出結果に基づき、レーダ画像上で船舶102を強調表示したり、警告音や警告メッセージを出力装置(例えば、LCDやスピーカ)により出力したりする。
【0048】
上記のように、本実施の形態では、衛星101に搭載されたレーダアンテナ(送信アンテナ)から発射された電波は海面(あるいは、地表)で散乱され、地上(例えば、地上局110a)や船舶(例えば、海上保安船110b)に設置された画像処理装置200のアンテナ201(受信アンテナ)に到達する。画像処理装置200では、アンテナ201の後段に、受信電波を画像化する画像処理部203、及び、船舶102等の特定物体を抽出する物体抽出部204が備えられている。そのため、受信した範囲の海上(あるいは、地表)の画像や特定物体抽出結果が得られる。それぞれの画像処理装置200にて得られた画像や特定物体抽出結果は、例えば、その最寄の海上(例えば、海上保安船110b)や地域(例えば、地上局110a)で即時利用される。また、センター120に集約され、総合的な状況監視や判断(偵察機や戦艦を派遣する等)に利用される。このように、レーダ散乱波の受信用のアンテナ201を含む画像処理装置200を地上(例えば、地上局110a)や船舶(例えば、海上保安船110b)にも設置することで、衛星101からのデータ伝送を不要とし、広範囲・高分解能・迅速な沿岸監視が可能となる。
【0049】
ここで、従来技術と本実施の形態とを対比する。
【0050】
従来、地上レーダによる観測を行う技術(以下、「従来技術1」という)では、地上レーダが、(1)電波を送信し、(2)海面からの散乱波を受信し、(3)観測データを画像化し、(4)画像解析(不審船抽出等)を行っていた。また、従来、衛星SARによる観測を行う技術(以下、「従来技術2」という)では、衛星SARが、(1)電波を送信し、(2)海面からの散乱波を受信し、(3)観測データを地上局に伝送していた。そして、地上局が、(4)観測データを受信し、(5)観測データを画像化し、(6)画像解析(不審船抽出等)を行っていた。これに対し、本実施の形態では、図1に示したように、衛星101に搭載された合成開口レーダが、(1)電波を送信すると、地上局110aや海上保安船110b等に設置された画像処理装置200が、(2)海面からの散乱波を受信し、(3)観測データを画像化し、(4)画像解析(不審船抽出等)を行う。
【0051】
分解能に関し、従来技術1では、電波発射方向はパルス圧縮技術により分解能を向上させることができるが、電波走査方向(アジマス方向)の分解能は上がらない。これに対し、従来技術2及び本実施の形態では、電波発射方向はパルス圧縮技術により分解能を向上させることができ、さらに、移動プラットフォーム(即ち、衛星101)にレーダを搭載し、移動しながら電波を照射するため、合成開口技術によりプラットフォームの移動方向(アジマス方向)の分解能も飛躍的に向上させることができる。
【0052】
観測範囲に関し、従来技術1では、地上レーダからみた地平線・水平線よりも向こう側を観測できない。通常の観測範囲(半径)は数10km(キロメートル)である。従来技術2では、衛星搭載SARは高度が高いため、非常に広範囲を見渡すことができる(約3000km)。しかしながら、衛星搭載SARは電波を送信する間は散乱波を受信できないため、観測時間に制限があり、実際にはレンジ方向で100km程度しか観測できない。これに対し、本実施の形態では、画像処理装置200(あるいは、その一部である受信機)の設置数や設置範囲を調整することで、任意の広さの範囲を観測できる。
【0053】
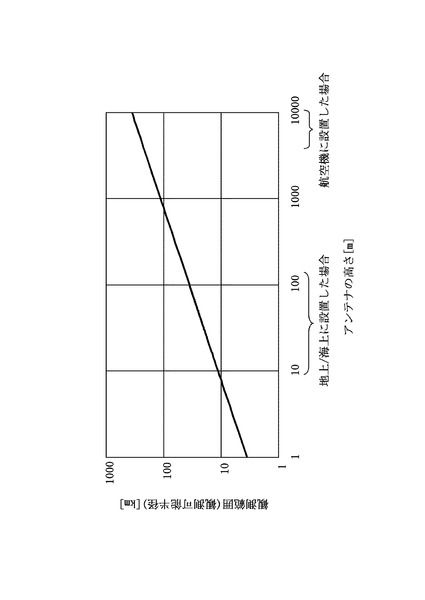
図4は、アンテナ201の高さ(画像処理装置200又は受信機の設置箇所の高さ)と観測範囲(観測可能半径)との関係を示すグラフである。
【0054】
図4に示すように、画像処理装置200の設置箇所を地上や船舶に限定すると、地上レーダと同様に観測範囲は数10kmに制限されるが、画像処理装置200を複数設置すれば、その設置数に応じて観測範囲を拡大することができる。また、画像処理装置200を航空機へ搭載することを想定すると、観測範囲は数100kmまで広がるため、地上や船舶に設置する画像処理装置200と組み合わせて使用すれば、非常に広範囲を観測できるようになる。このため、本実施の形態では、衛星101に搭載されたレーダアンテナが、従来(幅100km)よりも広い範囲(例えば、幅1000km)をカバーするように電波を発射してもよい(このとき、レーダアンテナを小さくすることができる)。この場合、当該範囲からの散乱波を受信できるように、画像処理装置200(あるいは、その一部である受信機)の設置数や設置範囲を調整すればよい。例えば、従来技術2では、1回の観測で日本海全体をカバーすることはできなかったが、本実施の形態では、日本海全体に対して迅速かつ網羅的な船舶監視が可能となる。
【0055】
即時性に関し、従来技術1では、地上レーダが電波を送信してから散乱波を受信後、ただちに画像化可能であるため、極めて即時性に優れている。従来技術2では、衛星搭載SARが観測を行ってから画像出力までには数時間を要する。これに対し、本実施の形態では、散乱波を受信する受信機が画像処理装置200に一体化されているか、あるいは、受信機と画像処理装置200の本体との間の通信速度が比較的速いため、従来技術1の地上レーダ並みの即時的な画像化が可能となる。
【0056】
ここで、日本列島を観測対象としたときの衛星SARのタイムラインを見積もった例を示す。
【0057】
従来技術2では、(1)観測:約4分、(2)一周回:約90分、(3)衛星から地上へのデータ伝送:約4分、(4)画像化:約5分となり、合計が約103分である。
【0058】
具体的には、(1)について、日本列島=約1800km、衛星飛行速度=約7.7km/秒とすると、観測所要時間=1800[km]/7.7[km/秒]=約4分が求まる。(2)について、極軌道の衛星(衛星「だいち」を想定)の一周回=約90分である。(3)について、1秒あたりの観測データ量(衛星「だいち」を想定)=約30MB(メガバイト)とすると、4分で約7GB(ギガバイト)の観測データ量となる。そして、衛星から地上へのデータ伝送レート(衛星「だいち」から中継衛星を使用して伝送する場合)=約240Mbps(1秒あたり240メガビット)=約30MB/秒とすると、4分の観測データに対して、約4分の伝送時間かかる。(4)について、1画像あたりの(観測の)長さ=約8秒分(約60km)とすると、4分の観測に対して約30画像となる。そして、1画像あたりの処理時間=約5分とすると、4分の観測に対して約2.5時間かかる。しかし、計算機を30台並列すれば5分で済むので、約5分とする。なお、中継衛星の位置によっては(2)が30分程度となり得る。
【0059】
衛星「だいち」には「直接ダウンリンクモード」というモードがある。これは、観測しながら地上へデータを伝送できるモードである。このモードを使用した場合、(1’)観測及び衛星から地上へのデータ伝送:約4分、(2’)画像化:約5分となり、合計が約9分となる。つまり、「直接ダウンリンクモード」を使用しない場合の(2)がなくなり、(1)と(3)が同時に実施されるため、画像が作成されるのにかかる時間が短くなる。
【0060】
しかしながら、「直接ダウンリンクモード」の場合、現在の技術では「観測しながら地上へ伝送する」ことによる電力、その他のH/W(ハードウェア)上の制約により、衛星から地上へのデータ伝送レートは、「直接ダウンリンクモード」を使用しない場合の半分となる。そのため、衛星から地上へのデータ伝送レート(衛星「だいち」の場合)=約120Mbps(1秒あたり120メガビット)=約15MB/秒となり、4分で半分の約3.5GBの観測データしか伝送できない。よって、約3.5GB分しか観測できない。
【0061】
このように、「直接ダウンリンクモード」では、観測データの分解能を犠牲にするか(画質が悪くなる)、もしくは、観測時間を犠牲にする(観測長が短くなる)といった課題がある。衛星「だいち」の「直接ダウンリンクモード」は、分解能が悪くなるように運用される。実際には分解能が悪くなることは嫌われ、「直接ダウンリンクモード」の運用はほとんど行われない。
【0062】
本実施の形態では、衛星から地上へのデータ伝送が不要となるため、伝送レートの高低による分解能や観測長の制限がない。よって、(1”)画像化:約5分のみとなり、合計が約5分となる。
【0063】
以上説明したように、本実施の形態によれば、合成開口レーダにより得られる散乱波を迅速に画像化することが可能となる。
【0064】
実施の形態2.
本実施の形態について、主に実施の形態1との差異を説明する。
【0065】
本実施の形態では、合成開口レーダが、地球を周回する衛星101ではなく、地球上空を飛行する航空機(飛行体の一例)に搭載されている。そのため、画像処理装置200の受信部202は、航空機に搭載された合成開口レーダから送信される電波が海面(観測対象領域の一例)で反射した散乱波をアンテナ201により受信する。広域沿岸監視システム100の構成については、図1に示した実施の形態1のものと同様である。
【0066】
本実施の形態においても、画像処理装置200、特にアンテナ201は、合成開口レーダが搭載された航空機の飛行高度より低い位置に設置される。具体的には、アンテナ201は、例えば地上局110a等、地球上の1つ以上の地点に設置される。また、アンテナ201は、例えば海上保安船110b等、地球上を移動する1つ以上の移動体に搭載される。
【0067】
以上、本発明の実施の形態について説明したが、これらのうち、2つ以上の実施の形態を組み合わせて実施しても構わない。あるいは、これらのうち、1つの実施の形態を部分的に実施しても構わない。あるいは、これらのうち、2つ以上の実施の形態を部分的に組み合わせて実施しても構わない。
【符号の説明】
【0068】
100 広域沿岸監視システム、101 衛星、102 船舶、110a 地上局、110b 海上保安船、120 センター、200 画像処理装置、201 アンテナ、202 受信部、203 画像処理部、204 物体抽出部、205 送信部、300 監視端末、301 受信部、302 表示部、901 LCD、902 キーボード、903 マウス、904 FDD、905 CDD、906 プリンタ、911 CPU、912 バス、913 ROM、914 RAM、915 通信ボード、920 HDD、921 オペレーティングシステム、922 ウィンドウシステム、923 プログラム群、924 ファイル群。
【技術分野】
【0001】
本発明は、画像処理装置及び監視システム及び画像処理方法及び画像処理プログラムに関するものである。本発明は、特に、バイスタティック合成開口レーダによる広域沿岸監視システムに関するものである。
【背景技術】
【0002】
従来技術として、海上を観測したSAR(合成開口レーダ)画像から、画像の輝度が一定の閾値以上のものを船舶として検出するものがあった(例えば、特許文献1〜4参照)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2001−4398号公報
【特許文献2】特開2000−67400号公報
【特許文献3】特開平11−281739号公報
【特許文献4】特表平9−507582号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
衛星搭載の合成開口レーダは昼夜問わずに観測可能なことから沿岸の不審船等の監視に最適なセンサである。しかしながら、衛星と地上局との間の通信速度が低いため、観測信号を地上局へ転送する際のデータ容量に制限があり、これが観測可能な領域の広さや分解能を制限する。また、観測→地上局へのデータ転送→地上における画像処理・解析→関係部署への情報通知というルートを経るため、センサにて得られた不審船等に関する情報が、その情報を必要とする部署へ通知されるまでに時間を要する。その時間は、場合によっては1日以上ということもあるため、合成開口レーダを広域沿岸監視システム等に十分に活用することが困難であった。
【0005】
本発明は、例えば、合成開口レーダの観測信号を迅速に画像化することを目的とする。
【課題を解決するための手段】
【0006】
本発明の一の態様に係る画像処理装置は、
飛行体の飛行高度より低い位置に設置されるアンテナと、
前記飛行体に搭載された合成開口レーダから送信される電波が観測対象領域で反射した散乱波を前記アンテナにより受信する受信部と、
前記受信部により受信された散乱波から前記観測対象領域のレーダ画像を生成する画像処理部とを備えることを特徴とする。
【0007】
前記飛行体は、地球を周回する衛星と地球上空を飛行する航空機とのいずれかであり、
前記アンテナは、地球上の少なくとも1つの地点に設置されることを特徴とする。
【0008】
前記飛行体は、地球を周回する衛星と地球上空を飛行する航空機とのいずれかであり、
前記アンテナは、地球上を移動する少なくとも1つの移動体に搭載されることを特徴とする。
【0009】
前記飛行体は、地球を周回する衛星であり、
前記アンテナは、地球上空を飛行する少なくとも1つの航空機に搭載されることを特徴とする。
【0010】
前記画像処理装置は、さらに、前記画像処理部により生成されたレーダ画像を解析して前記観測対象領域に存在する特定の物体を抽出する物体抽出部を備えることを特徴とする。
【0011】
前記観測対象領域は、海面を含み、
前記物体抽出部は、前記特定の物体として船舶を抽出することを特徴とする。
【0012】
本発明の一の態様に係る監視システムは、
画像処理装置を複数備えるとともに、
それぞれの画像処理装置により生成されたレーダ画像を結合し、1つのレーダ画像として画面に表示する監視端末を備えることを特徴とする。
【0013】
本発明の一の態様に係る画像処理方法は、
画像処理装置の受信部が、飛行体に搭載された合成開口レーダから送信される電波が観測対象領域で反射した散乱波を、前記飛行体の飛行高度より低い位置に設置されるアンテナにより受信し、
前記画像処理装置の画像処理部が、前記受信部により受信された散乱波から前記観測対象領域のレーダ画像を生成することを特徴とする。
【0014】
本発明の一の態様に係る画像処理プログラムは、
飛行体に搭載された合成開口レーダから送信される電波が観測対象領域で反射した散乱波を、前記飛行体の飛行高度より低い位置に設置されるアンテナにより受信する受信処理と、
前記受信処理により受信された散乱波から前記観測対象領域のレーダ画像を生成する画像処理とをコンピュータに実行させることを特徴とする。
【0015】
前記受信処理は、地球を周回する衛星と地球上空を飛行する航空機とのいずれかに搭載された合成開口レーダから送信される電波が観測対象領域で反射した散乱波を、地球上の少なくとも1つの地点に設置されるアンテナにより受信することを特徴とする。
【0016】
前記受信処理は、地球を周回する衛星と地球上空を飛行する航空機とのいずれかに搭載された合成開口レーダから送信される電波が観測対象領域で反射した散乱波を、地球上を移動する少なくとも1つの移動体に搭載されるアンテナにより受信することを特徴とする。
【0017】
前記受信処理は、地球を周回する衛星に搭載された合成開口レーダから送信される電波が観測対象領域で反射した散乱波を、地球上空を飛行する少なくとも1つの航空機に搭載されるアンテナにより受信することを特徴とする。
【0018】
前記画像処理プログラムは、さらに、前記画像処理により生成されたレーダ画像を解析して前記観測対象領域に存在する特定の物体を抽出する物体抽出処理をコンピュータに実行させることを特徴とする。
【0019】
前記観測対象領域は、海面を含み、
前記物体抽出処理は、前記特定の物体として船舶を抽出することを特徴とする。
【発明の効果】
【0020】
本発明の一の態様によれば、画像処理装置が、飛行体に搭載された合成開口レーダにより得られる散乱波を、飛行体の飛行高度より低い位置に設置されるアンテナにより受信するため、合成開口レーダにより得られる散乱波を迅速に画像化することが可能となる。
【図面の簡単な説明】
【0021】
【図1】実施の形態1に係る広域沿岸監視システムの構成を示すブロック図である。
【図2】実施の形態1に係る画像処理装置のハードウェア構成の一例を示す図である。
【図3】実施の形態1に係る(a)画像処理装置の動作、(b)監視端末の動作を示すフローチャートである。
【図4】実施の形態1に係るアンテナの高さと観測範囲との関係を示すグラフである。
【発明を実施するための形態】
【0022】
以下、本発明の実施の形態について、図を用いて説明する。
【0023】
実施の形態1.
図1は、本実施の形態に係る広域沿岸監視システム100(監視システムの一例)の構成を示すブロック図である。
【0024】
図1において、広域沿岸監視システム100は、多数の画像処理装置200と、少なくとも1つの監視端末300とを備える。
【0025】
それぞれの画像処理装置200は、アンテナ201を具備する。アンテナ201は、合成開口レーダが搭載された衛星101(飛行体の一例)の飛行高度より低い位置に設置される。具体的には、アンテナ201は、例えば地上局110a等、地上(地球上の一例)の1つの地点に設置される。アンテナ201は、地上に限らず、海上やその他の地球上の1つ以上の地点に設置されてもよい。また、アンテナ201は、例えば海上保安船110b等、海上(地球上の一例)を移動する船舶(移動体の一例)に搭載される。アンテナ201は、海上を移動する船舶に限らず、地上を移動する車両等の移動体やその他の地球上を移動する1つ以上の移動体に搭載されてもよい。また、図示していないが、アンテナ201は、地球上空を飛行する航空機に搭載されてもよい。
【0026】
それぞれの画像処理装置200は、受信部202、画像処理部203、物体抽出部204、送信部205を備える。受信部202は、地球を周回する衛星101に搭載された合成開口レーダから送信される電波が海面(観測対象領域の一例)で反射した散乱波をアンテナ201により受信する。画像処理部203は、受信部202により受信された散乱波から海面のレーダ画像を生成する。物体抽出部204は、画像処理部203により生成されたレーダ画像を解析して海面に存在する船舶102(特定の物体の一例)を抽出する。送信部205は、画像処理部203により生成されたレーダ画像や物体抽出部204による船舶102の抽出結果を監視端末300に送信する。
【0027】
なお、本実施の形態では、画像処理装置200全体がアンテナ201と同じ場所に設置されているが、アンテナ201及び受信部202を受信機として、画像処理装置200のその他の部分(即ち、画像処理部203、物体抽出部204、送信部205を含む画像処理装置200の本体)と別の場所に設置してもよい。このとき、1つの画像処理装置200の本体に対して、複数の受信機を設置してもよい。例えば、海上保安船110b等、海上を移動する複数の船舶に受信機を搭載し、地上局110a等、地上の少なくとも1つの地点に当該受信機と通信可能な画像処理装置200の本体を設置してもよい。この場合、画像処理部203、物体抽出部204、送信部205の処理を少数箇所でまとめて行うことができるため、処理効率が向上する。また、受信機の設置数に対して、画像処理装置200の本体の設置数を減らすことができるため、コストが削減できる。
【0028】
また、本実施の形態では、受信部202が海面からの散乱波をアンテナ201により受信するが、受信部202が地表等、他の観測対象領域からの散乱波をアンテナ201により受信するようにしてもよい。受信部202が地表からの散乱波をアンテナ201により受信する場合、画像処理部203は、受信部202により受信された散乱波から地表のレーダ画像を生成する。そして、物体抽出部204は、画像処理部203により生成されたレーダ画像を解析して、例えば地表に存在する車両等の移動体(特定の物体の一例)を抽出する。送信部205は、画像処理部203により生成されたレーダ画像や物体抽出部204による移動体の抽出結果を監視端末300に送信する。
【0029】
監視端末300は、例えば地上や海上(地球上の一例)に敷設されるセンター120に設置される。なお、監視端末300は、それぞれの画像処理装置200と同じ場所に設置されてもよい。よって、監視端末300は、例えば地上局110aや海上保安船110bに設置されてもよい。
【0030】
監視端末300は、受信部301、表示部302を備える。受信部301は、それぞれの画像処理装置200の送信部205により送信されたレーダ画像や船舶102の抽出結果を受信する。表示部302は、受信部301により受信されたレーダ画像を結合し、1つのレーダ画像として画面に表示する。また、表示部302は、受信部301により受信された船舶102の抽出結果を画面に表示する。
【0031】
図2は、画像処理装置200のハードウェア構成の一例を示す図である。なお、監視端末300のハードウェア構成についても、本例と同様のものを採用することができる。
【0032】
図2において、画像処理装置200は、コンピュータであり、LCD901(Liquid・Crystal・Display)、キーボード902(K/B)、マウス903、FDD904(Flexible・Disk・Drive)、CDD905(Compact・Disc・Drive)、プリンタ906といったハードウェアデバイスを備えている。これらのハードウェアデバイスはケーブルや信号線で接続されている。LCD901の代わりに、CRT(Cathode・Ray・Tube)、あるいは、その他の表示装置が用いられてもよい。マウス903の代わりに、タッチパネル、タッチパッド、トラックボール、ペンタブレット、あるいは、その他のポインティングデバイスが用いられてもよい。
【0033】
画像処理装置200は、プログラムを実行するCPU911(Central・Processing・Unit)を備えている。CPU911は、処理装置の一例である。CPU911は、バス912を介してROM913(Read・Only・Memory)、RAM914(Random・Access・Memory)、通信ボード915、LCD901、キーボード902、マウス903、FDD904、CDD905、プリンタ906、HDD920(Hard・Disk・Drive)と接続され、これらのハードウェアデバイスを制御する。HDD920の代わりに、フラッシュメモリ、光ディスク装置、メモリカードリーダライタ又はその他の記憶媒体が用いられてもよい。
【0034】
RAM914は、揮発性メモリの一例である。ROM913、FDD904、CDD905、HDD920は、不揮発性メモリの一例である。これらは、記憶装置の一例である。通信ボード915、キーボード902、マウス903、FDD904、CDD905は、入力装置の一例である。また、通信ボード915、LCD901、プリンタ906は、出力装置の一例である。
【0035】
通信ボード915は、LAN(Local・Area・Network)等に接続されている。通信ボード915は、LANに限らず、IP−VPN(Internet・Protocol・Virtual・Private・Network)、広域LAN、ATM(Asynchronous・Transfer・Mode)ネットワークといったWAN(Wide・Area・Network)、あるいは、インターネットに接続されていても構わない。LAN、WAN、インターネットは、ネットワークの一例である。
【0036】
HDD920には、オペレーティングシステム921(OS)、ウィンドウシステム922、プログラム群923、ファイル群924が記憶されている。プログラム群923のプログラムは、CPU911、オペレーティングシステム921、ウィンドウシステム922により実行される。プログラム群923には、本実施の形態の説明において「〜部」として説明する機能を実行するプログラムが含まれている。プログラムは、CPU911により読み出され実行される。ファイル群924には、本実施の形態の説明において、「〜データ」、「〜情報」、「〜ID(識別子)」、「〜フラグ」、「〜結果」として説明するデータや情報や信号値や変数値やパラメータが、「〜ファイル」や「〜データベース」や「〜テーブル」の各項目として含まれている。「〜ファイル」や「〜データベース」や「〜テーブル」は、RAM914やHDD920等の記憶媒体に記憶される。RAM914やHDD920等の記憶媒体に記憶されたデータや情報や信号値や変数値やパラメータは、読み書き回路を介してCPU911によりメインメモリやキャッシュメモリに読み出され、抽出、検索、参照、比較、演算、計算、制御、出力、印刷、表示といったCPU911の処理(動作)に用いられる。抽出、検索、参照、比較、演算、計算、制御、出力、印刷、表示といったCPU911の処理中、データや情報や信号値や変数値やパラメータは、メインメモリやキャッシュメモリやバッファメモリに一時的に記憶される。
【0037】
本実施の形態の説明において用いるブロック図やフローチャートの矢印の部分は主としてデータや信号の入出力を示す。データや信号は、RAM914等のメモリ、FDD904のフレキシブルディスク(FD)、CDD905のコンパクトディスク(CD)、HDD920の磁気ディスク、光ディスク、DVD(Digital・Versatile・Disc)、あるいは、その他の記録媒体に記録される。また、データや信号は、バス912、信号線、ケーブル、あるいは、その他の伝送媒体により伝送される。
【0038】
本実施の形態の説明において「〜部」として説明するものは、「〜回路」、「〜装置」、「〜機器」であってもよく、また、「〜ステップ」、「〜工程」、「〜手順」、「〜処理」であってもよい。即ち、「〜部」として説明するものは、ROM913に記憶されたファームウェアで実現されていても構わない。あるいは、「〜部」として説明するものは、ソフトウェアのみ、あるいは、素子、デバイス、基板、配線といったハードウェアのみで実現されていても構わない。あるいは、「〜部」として説明するものは、ソフトウェアとハードウェアとの組み合わせ、あるいは、ソフトウェアとハードウェアとファームウェアとの組み合わせで実現されていても構わない。ファームウェアとソフトウェアは、プログラムとして、フレキシブルディスク、コンパクトディスク、磁気ディスク、光ディスク、DVD等の記録媒体に記憶される。プログラムはCPU911により読み出され、CPU911により実行される。即ち、プログラムは、本実施の形態の説明で述べる「〜部」としてコンピュータを機能させるものである。あるいは、プログラムは、本実施の形態の説明で述べる「〜部」の手順や方法をコンピュータに実行させるものである。
【0039】
図3(a)は、画像処理装置200の動作(本実施の形態に係る画像処理方法、本実施の形態に係る画像処理プログラムの処理手順)を示すフローチャートである。
【0040】
ステップS101(受信処理)において、受信部202は、衛星101に搭載された合成開口レーダから送信される電波が海面で反射した散乱波をアンテナ201により受信する。そして、受信部202は、受信した散乱波のデータを画像処理部203に渡す。
【0041】
ステップS102(画像処理)において、画像処理部203は、ステップS101で渡された散乱波のデータに対し、レンジ圧縮及びアジマス圧縮処理を処理装置(例えば、CPU911)により実行してSLC(Single・Look・Complex)を生成する。即ち、画像処理部203は、海面からの散乱波から海面のレーダ画像を生成する。
【0042】
ステップS103(物体抽出処理)において、物体抽出部204は、例えば記憶装置(例えば、HDD920)に予め格納されている閾値を読み出す。この閾値は、レーダ画像の輝度値の閾値であり、海面のレーダ画像から船舶102を検出するためのものである。物体抽出部204は、ステップS102で生成されたレーダ画像を処理装置により解析して、読み出した閾値以上の輝度値をもつ部分を抽出する。そして、物体抽出部204は、抽出した部分が海面に存在する船舶102であると判断する。
【0043】
物体抽出部204は、さらに、レーダ画像から抽出した船舶102が不審船であるか否かを判断してもよい。この場合、例えば海上を移動する船舶の大きさ、形状、移動ルート(時刻と位置との組み合わせ)といった、個別の船舶に関する情報を記憶装置に予め格納しておく。物体抽出部204は、レーダ画像から抽出した船舶102に関する情報を検索し、当該情報が記憶装置に格納されていない場合、その船舶102が不審船であると処理装置により判断する。あるいは、物体抽出部204は、AIS(Automatic・Identification・System)の信号を送信していない船舶102を不審船であると判断してもよい。
【0044】
ステップS104(送信処理)において、送信部205は、ステップS103で生成されたレーダ画像やステップS103における船舶102の抽出結果を、ネットワーク等を介して監視端末300に送信する。
【0045】
図3(b)は、監視端末300の動作(本実施の形態に係る監視方法、本実施の形態に係る監視プログラムの処理手順)を示すフローチャートである。
【0046】
ステップS201(受信処理)において、受信部301は、それぞれの画像処理装置200から、ネットワーク等を介してレーダ画像や船舶102の抽出結果を受信する。
【0047】
ステップS202(表示処理)において、表示部302は、ステップS201で受信されたレーダ画像を処理装置(例えば、CPU)により結合し、1つのレーダ画像として出力装置により画面に表示する。また、表示部302は、ステップS201で受信された船舶102の抽出結果に基づき、レーダ画像上で船舶102を強調表示したり、警告音や警告メッセージを出力装置(例えば、LCDやスピーカ)により出力したりする。
【0048】
上記のように、本実施の形態では、衛星101に搭載されたレーダアンテナ(送信アンテナ)から発射された電波は海面(あるいは、地表)で散乱され、地上(例えば、地上局110a)や船舶(例えば、海上保安船110b)に設置された画像処理装置200のアンテナ201(受信アンテナ)に到達する。画像処理装置200では、アンテナ201の後段に、受信電波を画像化する画像処理部203、及び、船舶102等の特定物体を抽出する物体抽出部204が備えられている。そのため、受信した範囲の海上(あるいは、地表)の画像や特定物体抽出結果が得られる。それぞれの画像処理装置200にて得られた画像や特定物体抽出結果は、例えば、その最寄の海上(例えば、海上保安船110b)や地域(例えば、地上局110a)で即時利用される。また、センター120に集約され、総合的な状況監視や判断(偵察機や戦艦を派遣する等)に利用される。このように、レーダ散乱波の受信用のアンテナ201を含む画像処理装置200を地上(例えば、地上局110a)や船舶(例えば、海上保安船110b)にも設置することで、衛星101からのデータ伝送を不要とし、広範囲・高分解能・迅速な沿岸監視が可能となる。
【0049】
ここで、従来技術と本実施の形態とを対比する。
【0050】
従来、地上レーダによる観測を行う技術(以下、「従来技術1」という)では、地上レーダが、(1)電波を送信し、(2)海面からの散乱波を受信し、(3)観測データを画像化し、(4)画像解析(不審船抽出等)を行っていた。また、従来、衛星SARによる観測を行う技術(以下、「従来技術2」という)では、衛星SARが、(1)電波を送信し、(2)海面からの散乱波を受信し、(3)観測データを地上局に伝送していた。そして、地上局が、(4)観測データを受信し、(5)観測データを画像化し、(6)画像解析(不審船抽出等)を行っていた。これに対し、本実施の形態では、図1に示したように、衛星101に搭載された合成開口レーダが、(1)電波を送信すると、地上局110aや海上保安船110b等に設置された画像処理装置200が、(2)海面からの散乱波を受信し、(3)観測データを画像化し、(4)画像解析(不審船抽出等)を行う。
【0051】
分解能に関し、従来技術1では、電波発射方向はパルス圧縮技術により分解能を向上させることができるが、電波走査方向(アジマス方向)の分解能は上がらない。これに対し、従来技術2及び本実施の形態では、電波発射方向はパルス圧縮技術により分解能を向上させることができ、さらに、移動プラットフォーム(即ち、衛星101)にレーダを搭載し、移動しながら電波を照射するため、合成開口技術によりプラットフォームの移動方向(アジマス方向)の分解能も飛躍的に向上させることができる。
【0052】
観測範囲に関し、従来技術1では、地上レーダからみた地平線・水平線よりも向こう側を観測できない。通常の観測範囲(半径)は数10km(キロメートル)である。従来技術2では、衛星搭載SARは高度が高いため、非常に広範囲を見渡すことができる(約3000km)。しかしながら、衛星搭載SARは電波を送信する間は散乱波を受信できないため、観測時間に制限があり、実際にはレンジ方向で100km程度しか観測できない。これに対し、本実施の形態では、画像処理装置200(あるいは、その一部である受信機)の設置数や設置範囲を調整することで、任意の広さの範囲を観測できる。
【0053】
図4は、アンテナ201の高さ(画像処理装置200又は受信機の設置箇所の高さ)と観測範囲(観測可能半径)との関係を示すグラフである。
【0054】
図4に示すように、画像処理装置200の設置箇所を地上や船舶に限定すると、地上レーダと同様に観測範囲は数10kmに制限されるが、画像処理装置200を複数設置すれば、その設置数に応じて観測範囲を拡大することができる。また、画像処理装置200を航空機へ搭載することを想定すると、観測範囲は数100kmまで広がるため、地上や船舶に設置する画像処理装置200と組み合わせて使用すれば、非常に広範囲を観測できるようになる。このため、本実施の形態では、衛星101に搭載されたレーダアンテナが、従来(幅100km)よりも広い範囲(例えば、幅1000km)をカバーするように電波を発射してもよい(このとき、レーダアンテナを小さくすることができる)。この場合、当該範囲からの散乱波を受信できるように、画像処理装置200(あるいは、その一部である受信機)の設置数や設置範囲を調整すればよい。例えば、従来技術2では、1回の観測で日本海全体をカバーすることはできなかったが、本実施の形態では、日本海全体に対して迅速かつ網羅的な船舶監視が可能となる。
【0055】
即時性に関し、従来技術1では、地上レーダが電波を送信してから散乱波を受信後、ただちに画像化可能であるため、極めて即時性に優れている。従来技術2では、衛星搭載SARが観測を行ってから画像出力までには数時間を要する。これに対し、本実施の形態では、散乱波を受信する受信機が画像処理装置200に一体化されているか、あるいは、受信機と画像処理装置200の本体との間の通信速度が比較的速いため、従来技術1の地上レーダ並みの即時的な画像化が可能となる。
【0056】
ここで、日本列島を観測対象としたときの衛星SARのタイムラインを見積もった例を示す。
【0057】
従来技術2では、(1)観測:約4分、(2)一周回:約90分、(3)衛星から地上へのデータ伝送:約4分、(4)画像化:約5分となり、合計が約103分である。
【0058】
具体的には、(1)について、日本列島=約1800km、衛星飛行速度=約7.7km/秒とすると、観測所要時間=1800[km]/7.7[km/秒]=約4分が求まる。(2)について、極軌道の衛星(衛星「だいち」を想定)の一周回=約90分である。(3)について、1秒あたりの観測データ量(衛星「だいち」を想定)=約30MB(メガバイト)とすると、4分で約7GB(ギガバイト)の観測データ量となる。そして、衛星から地上へのデータ伝送レート(衛星「だいち」から中継衛星を使用して伝送する場合)=約240Mbps(1秒あたり240メガビット)=約30MB/秒とすると、4分の観測データに対して、約4分の伝送時間かかる。(4)について、1画像あたりの(観測の)長さ=約8秒分(約60km)とすると、4分の観測に対して約30画像となる。そして、1画像あたりの処理時間=約5分とすると、4分の観測に対して約2.5時間かかる。しかし、計算機を30台並列すれば5分で済むので、約5分とする。なお、中継衛星の位置によっては(2)が30分程度となり得る。
【0059】
衛星「だいち」には「直接ダウンリンクモード」というモードがある。これは、観測しながら地上へデータを伝送できるモードである。このモードを使用した場合、(1’)観測及び衛星から地上へのデータ伝送:約4分、(2’)画像化:約5分となり、合計が約9分となる。つまり、「直接ダウンリンクモード」を使用しない場合の(2)がなくなり、(1)と(3)が同時に実施されるため、画像が作成されるのにかかる時間が短くなる。
【0060】
しかしながら、「直接ダウンリンクモード」の場合、現在の技術では「観測しながら地上へ伝送する」ことによる電力、その他のH/W(ハードウェア)上の制約により、衛星から地上へのデータ伝送レートは、「直接ダウンリンクモード」を使用しない場合の半分となる。そのため、衛星から地上へのデータ伝送レート(衛星「だいち」の場合)=約120Mbps(1秒あたり120メガビット)=約15MB/秒となり、4分で半分の約3.5GBの観測データしか伝送できない。よって、約3.5GB分しか観測できない。
【0061】
このように、「直接ダウンリンクモード」では、観測データの分解能を犠牲にするか(画質が悪くなる)、もしくは、観測時間を犠牲にする(観測長が短くなる)といった課題がある。衛星「だいち」の「直接ダウンリンクモード」は、分解能が悪くなるように運用される。実際には分解能が悪くなることは嫌われ、「直接ダウンリンクモード」の運用はほとんど行われない。
【0062】
本実施の形態では、衛星から地上へのデータ伝送が不要となるため、伝送レートの高低による分解能や観測長の制限がない。よって、(1”)画像化:約5分のみとなり、合計が約5分となる。
【0063】
以上説明したように、本実施の形態によれば、合成開口レーダにより得られる散乱波を迅速に画像化することが可能となる。
【0064】
実施の形態2.
本実施の形態について、主に実施の形態1との差異を説明する。
【0065】
本実施の形態では、合成開口レーダが、地球を周回する衛星101ではなく、地球上空を飛行する航空機(飛行体の一例)に搭載されている。そのため、画像処理装置200の受信部202は、航空機に搭載された合成開口レーダから送信される電波が海面(観測対象領域の一例)で反射した散乱波をアンテナ201により受信する。広域沿岸監視システム100の構成については、図1に示した実施の形態1のものと同様である。
【0066】
本実施の形態においても、画像処理装置200、特にアンテナ201は、合成開口レーダが搭載された航空機の飛行高度より低い位置に設置される。具体的には、アンテナ201は、例えば地上局110a等、地球上の1つ以上の地点に設置される。また、アンテナ201は、例えば海上保安船110b等、地球上を移動する1つ以上の移動体に搭載される。
【0067】
以上、本発明の実施の形態について説明したが、これらのうち、2つ以上の実施の形態を組み合わせて実施しても構わない。あるいは、これらのうち、1つの実施の形態を部分的に実施しても構わない。あるいは、これらのうち、2つ以上の実施の形態を部分的に組み合わせて実施しても構わない。
【符号の説明】
【0068】
100 広域沿岸監視システム、101 衛星、102 船舶、110a 地上局、110b 海上保安船、120 センター、200 画像処理装置、201 アンテナ、202 受信部、203 画像処理部、204 物体抽出部、205 送信部、300 監視端末、301 受信部、302 表示部、901 LCD、902 キーボード、903 マウス、904 FDD、905 CDD、906 プリンタ、911 CPU、912 バス、913 ROM、914 RAM、915 通信ボード、920 HDD、921 オペレーティングシステム、922 ウィンドウシステム、923 プログラム群、924 ファイル群。
【特許請求の範囲】
【請求項1】
飛行体の飛行高度より低い位置に設置されるアンテナと、
前記飛行体に搭載された合成開口レーダから送信される電波が観測対象領域で反射した散乱波を前記アンテナにより受信する受信部と、
前記受信部により受信された散乱波から前記観測対象領域のレーダ画像を生成する画像処理部とを備えることを特徴とする画像処理装置。
【請求項2】
前記飛行体は、地球を周回する衛星と地球上空を飛行する航空機とのいずれかであり、
前記アンテナは、地球上の少なくとも1つの地点に設置されることを特徴とする請求項1に記載の画像処理装置。
【請求項3】
前記飛行体は、地球を周回する衛星と地球上空を飛行する航空機とのいずれかであり、
前記アンテナは、地球上を移動する少なくとも1つの移動体に搭載されることを特徴とする請求項1に記載の画像処理装置。
【請求項4】
前記飛行体は、地球を周回する衛星であり、
前記アンテナは、地球上空を飛行する少なくとも1つの航空機に搭載されることを特徴とする請求項1に記載の画像処理装置。
【請求項5】
前記画像処理装置は、さらに、前記画像処理部により生成されたレーダ画像を解析して前記観測対象領域に存在する特定の物体を抽出する物体抽出部を備えることを特徴とする請求項1から4までのいずれかに記載の画像処理装置。
【請求項6】
前記観測対象領域は、海面を含み、
前記物体抽出部は、前記特定の物体として船舶を抽出することを特徴とする請求項5に記載の画像処理装置。
【請求項7】
請求項1から6までのいずれかに記載の画像処理装置を複数備えるとともに、
それぞれの画像処理装置により生成されたレーダ画像を結合し、1つのレーダ画像として画面に表示する監視端末を備えることを特徴とする監視システム。
【請求項8】
画像処理装置の受信部が、飛行体に搭載された合成開口レーダから送信される電波が観測対象領域で反射した散乱波を、前記飛行体の飛行高度より低い位置に設置されるアンテナにより受信し、
前記画像処理装置の画像処理部が、前記受信部により受信された散乱波から前記観測対象領域のレーダ画像を生成することを特徴とする画像処理方法。
【請求項9】
飛行体に搭載された合成開口レーダから送信される電波が観測対象領域で反射した散乱波を、前記飛行体の飛行高度より低い位置に設置されるアンテナにより受信する受信処理と、
前記受信処理により受信された散乱波から前記観測対象領域のレーダ画像を生成する画像処理とをコンピュータに実行させることを特徴とする画像処理プログラム。
【請求項10】
前記受信処理は、地球を周回する衛星と地球上空を飛行する航空機とのいずれかに搭載された合成開口レーダから送信される電波が観測対象領域で反射した散乱波を、地球上の少なくとも1つの地点に設置されるアンテナにより受信することを特徴とする請求項9に記載の画像処理プログラム。
【請求項11】
前記受信処理は、地球を周回する衛星と地球上空を飛行する航空機とのいずれかに搭載された合成開口レーダから送信される電波が観測対象領域で反射した散乱波を、地球上を移動する少なくとも1つの移動体に搭載されるアンテナにより受信することを特徴とする請求項9に記載の画像処理プログラム。
【請求項12】
前記受信処理は、地球を周回する衛星に搭載された合成開口レーダから送信される電波が観測対象領域で反射した散乱波を、地球上空を飛行する少なくとも1つの航空機に搭載されるアンテナにより受信することを特徴とする請求項9に記載の画像処理プログラム。
【請求項13】
前記画像処理プログラムは、さらに、前記画像処理により生成されたレーダ画像を解析して前記観測対象領域に存在する特定の物体を抽出する物体抽出処理をコンピュータに実行させることを特徴とする請求項9から12までのいずれかに記載の画像処理プログラム。
【請求項14】
前記観測対象領域は、海面を含み、
前記物体抽出処理は、前記特定の物体として船舶を抽出することを特徴とする請求項13に記載の画像処理プログラム。
【請求項1】
飛行体の飛行高度より低い位置に設置されるアンテナと、
前記飛行体に搭載された合成開口レーダから送信される電波が観測対象領域で反射した散乱波を前記アンテナにより受信する受信部と、
前記受信部により受信された散乱波から前記観測対象領域のレーダ画像を生成する画像処理部とを備えることを特徴とする画像処理装置。
【請求項2】
前記飛行体は、地球を周回する衛星と地球上空を飛行する航空機とのいずれかであり、
前記アンテナは、地球上の少なくとも1つの地点に設置されることを特徴とする請求項1に記載の画像処理装置。
【請求項3】
前記飛行体は、地球を周回する衛星と地球上空を飛行する航空機とのいずれかであり、
前記アンテナは、地球上を移動する少なくとも1つの移動体に搭載されることを特徴とする請求項1に記載の画像処理装置。
【請求項4】
前記飛行体は、地球を周回する衛星であり、
前記アンテナは、地球上空を飛行する少なくとも1つの航空機に搭載されることを特徴とする請求項1に記載の画像処理装置。
【請求項5】
前記画像処理装置は、さらに、前記画像処理部により生成されたレーダ画像を解析して前記観測対象領域に存在する特定の物体を抽出する物体抽出部を備えることを特徴とする請求項1から4までのいずれかに記載の画像処理装置。
【請求項6】
前記観測対象領域は、海面を含み、
前記物体抽出部は、前記特定の物体として船舶を抽出することを特徴とする請求項5に記載の画像処理装置。
【請求項7】
請求項1から6までのいずれかに記載の画像処理装置を複数備えるとともに、
それぞれの画像処理装置により生成されたレーダ画像を結合し、1つのレーダ画像として画面に表示する監視端末を備えることを特徴とする監視システム。
【請求項8】
画像処理装置の受信部が、飛行体に搭載された合成開口レーダから送信される電波が観測対象領域で反射した散乱波を、前記飛行体の飛行高度より低い位置に設置されるアンテナにより受信し、
前記画像処理装置の画像処理部が、前記受信部により受信された散乱波から前記観測対象領域のレーダ画像を生成することを特徴とする画像処理方法。
【請求項9】
飛行体に搭載された合成開口レーダから送信される電波が観測対象領域で反射した散乱波を、前記飛行体の飛行高度より低い位置に設置されるアンテナにより受信する受信処理と、
前記受信処理により受信された散乱波から前記観測対象領域のレーダ画像を生成する画像処理とをコンピュータに実行させることを特徴とする画像処理プログラム。
【請求項10】
前記受信処理は、地球を周回する衛星と地球上空を飛行する航空機とのいずれかに搭載された合成開口レーダから送信される電波が観測対象領域で反射した散乱波を、地球上の少なくとも1つの地点に設置されるアンテナにより受信することを特徴とする請求項9に記載の画像処理プログラム。
【請求項11】
前記受信処理は、地球を周回する衛星と地球上空を飛行する航空機とのいずれかに搭載された合成開口レーダから送信される電波が観測対象領域で反射した散乱波を、地球上を移動する少なくとも1つの移動体に搭載されるアンテナにより受信することを特徴とする請求項9に記載の画像処理プログラム。
【請求項12】
前記受信処理は、地球を周回する衛星に搭載された合成開口レーダから送信される電波が観測対象領域で反射した散乱波を、地球上空を飛行する少なくとも1つの航空機に搭載されるアンテナにより受信することを特徴とする請求項9に記載の画像処理プログラム。
【請求項13】
前記画像処理プログラムは、さらに、前記画像処理により生成されたレーダ画像を解析して前記観測対象領域に存在する特定の物体を抽出する物体抽出処理をコンピュータに実行させることを特徴とする請求項9から12までのいずれかに記載の画像処理プログラム。
【請求項14】
前記観測対象領域は、海面を含み、
前記物体抽出処理は、前記特定の物体として船舶を抽出することを特徴とする請求項13に記載の画像処理プログラム。
【図1】


【図2】
【図3】
【図4】
【図2】
【図3】
【図4】
【公開番号】特開2011−208961(P2011−208961A)
【公開日】平成23年10月20日(2011.10.20)
【国際特許分類】
【出願番号】特願2010−74199(P2010−74199)
【出願日】平成22年3月29日(2010.3.29)
【出願人】(591102095)三菱スペース・ソフトウエア株式会社 (148)
【Fターム(参考)】
【公開日】平成23年10月20日(2011.10.20)
【国際特許分類】
【出願日】平成22年3月29日(2010.3.29)
【出願人】(591102095)三菱スペース・ソフトウエア株式会社 (148)
【Fターム(参考)】
[ Back to top ]