
画像処理装置
【構成】カメラCM_0〜CM_3は、路面を移動する車両の互いに異なる位置に設けられて、車両の周囲を表す被写界像P_0〜P_3を出力する。CPU12pは、出力された被写界像P_0〜P_3に基づいて路面に対する全周鳥瞰画像を作成し、作成された全周鳥瞰画像を表示装置24の画面に表示する。CPU12pはまた、全周鳥瞰画像の作成処理と並列して車両の位置を検出し、検出された位置とデータベース22の地図データとに基づいてナビゲーション情報を作成し、そして作成されたナビゲーション情報を表示装置24の画面に表示する。
【効果】車両100の周囲の安全性およびナビゲーション情報の両方を同一画面で確認することができ、操縦支援性能が向上する。
【効果】車両100の周囲の安全性およびナビゲーション情報の両方を同一画面で確認することができ、操縦支援性能が向上する。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、画像処理装置に関し、特に、移動体に設けられたカメラによって捉えられた被写界を表す画像をナビゲーション情報とともに画面に表示する、画像処理装置に関する。
【背景技術】
【0002】
この種の装置の一例が、特許文献1に開示されている。この背景技術によれば、自動車の進行方向の景色は、自動車のノーズに取り付けられたカメラによって捉えられる。画像合成部は、ナビゲーション情報要素をカメラによって捉えられた実写画像に合成し、合成画像を表示器に表示する。これによって、運転手は自動車の現在位置や進行経路をより感覚的に把握することができる。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開平11−108684号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかし、ナビゲーション情報要素と合成される実写画像は、自動車の進行方向の景色を表すに過ぎない。このため、背景技術では、操縦支援性能に限界がある。
【0005】
それゆえに、この発明の主たる目的は、操縦支援性能を向上させることができる、画像処理装置を提供することである。
【課題を解決するための手段】
【0006】
この発明に従う画像処理装置(10:実施例で相当する参照符号。以下同じ)は、基準面を移動する移動体(100)の互いに異なる位置に設けられて移動体の周囲を表す被写界像を出力する複数のカメラ(CM_0~CM_3)、複数のカメラから出力された被写界像に基づいて基準面に対する鳥瞰画像を作成する第1作成手段(S21)、第1作成手段によって作成された鳥瞰画像をモニタ画面に表示する第1表示手段(S31~S33, S39~S47)、第1作成手段の作成処理と並列して移動体の位置を検出する検出手段(S23)、検出手段の検出結果と地図情報とに基づいてナビゲーション情報を作成する第2作成手段(S27, S35, S53, S57)、および第2作成手段によって作成されたナビゲーション情報を第1表示手段の表示処理に関連してモニタ画面に表示する第2表示手段(S29, S37, S55, S59)を備える。
【0007】
好ましくは、ナビゲーション情報は地図画像を含み、第1表示手段は鳥瞰画像を地図画像に多重する第1多重手段(S47)を含む。
【0008】
さらに好ましくは、移動体および基準面はそれぞれ車両および路面に相当し、第1表示手段は路面ペイントを参照して鳥瞰画像の多重位置を決定する決定手段(S43, S45)をさらに含む。より好ましくは、決定手段は移動体の向きをさらに参照して多重位置を決定する。
【0009】
好ましくは、ナビゲーション情報は目的地までのルートを可視的に示すルート情報を含み、第2表示手段はルート情報を地図画像および/または鳥瞰画像に多重する第2多重手段(S55,S59)を含む。
【0010】
好ましくは、移動体の周辺から障害物が検出されたとき警告を発生する発生手段(S61~S63)がさらに備えられる。
【発明の効果】
【0011】
この発明によれば、鳥瞰画像は、移動体の互いに異なる位置に設けられた複数のカメラからの出力に基づいて作成され、移動体の周囲を再現する。移動体の位置と地図情報とに基づいて作成されたナビゲーション情報は、このような鳥瞰画像とともにモニタ画面に表示される。これによって、移動体の周囲の安全性およびナビゲーション情報の両方を同一画面で確認することができ、操縦支援性能が向上する。
【0012】
この発明の上述の目的,その他の目的,特徴および利点は、図面を参照して行う以下の実施例の詳細な説明から一層明らかとなろう。
【図面の簡単な説明】
【0013】
【図1】この発明の基本的構成を示すブロック図である。
【図2】この発明の一実施例の構成を示すブロック図である。
【図3】図2実施例が搭載された車両の一例を示す斜視図である。
【図4】車両に取り付けられた複数のカメラによって捉えられる視野を示す図解図である。
【図5】カメラの出力に基づく鳥瞰画像の作成動作の一部を示す図解図である。
【図6】表示装置によって表示される運転支援画像の一例を示す図解図である。
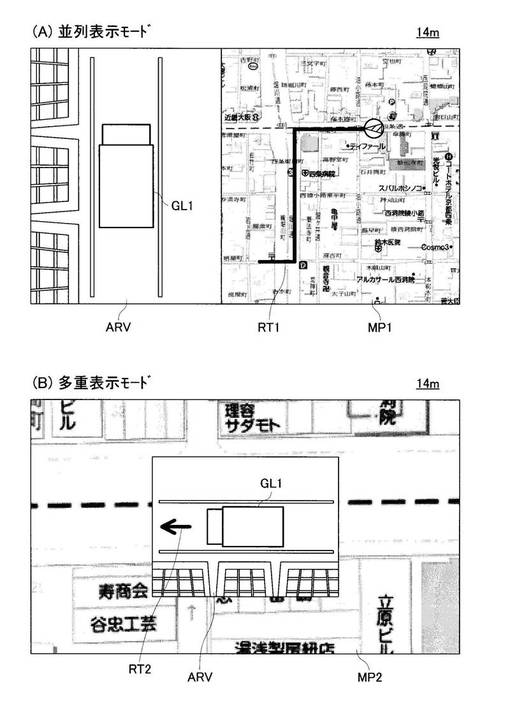
【図7】(A)は並列表示モードに対応して表示される運転支援画像の一例を示す図解図であり、(B)は多重表示モードに対応して表示される運転支援画像の一例を示す図解図である。
【図8】障害物が検知されたときに表示される警告の一例を示す図解図である。
【図9】図2実施例に適用されるCPUの動作の一部を示すフロー図である。
【図10】図2実施例に適用されるCPUの動作の他の一部を示すフロー図である。
【図11】図2実施例に適用されるCPUの動作のその他の一部を示すフロー図である。
【図12】図2実施例に適用されるCPUの動作のさらにその他の一部を示すフロー図である。
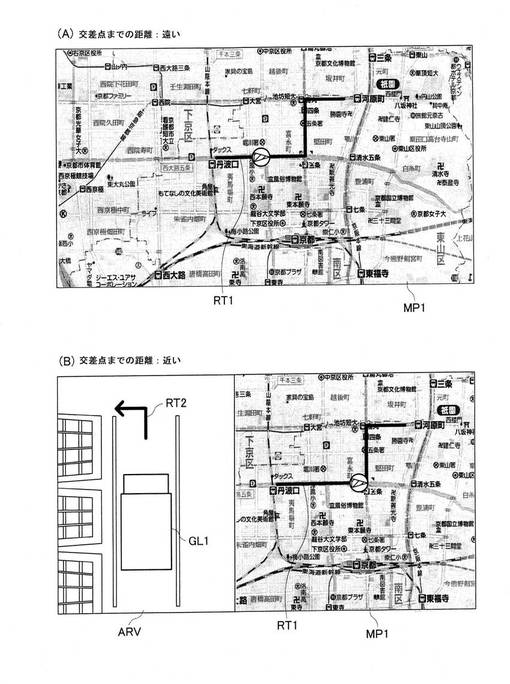
【図13】(A)は他の実施例において表示される運転支援画像の一例を示す図解図である。(B)は他の実施例において表示される運転支援画像の一例を示す図解図である。
【図14】は他の実施例に適用されるCPUの動作の一部を示すフロー図である。
【図15】は他の実施例に適用されるCPUの動作の一部を示すフロー図である。
【発明を実施するための形態】
【0014】
以下、この発明の実施の形態を図面を参照しながら説明する。
[基本的構成]
図1を参照して、この発明の画像処理装置は、基本的に次のように構成される。複数のカメラ1,1,…は、基準面を移動する移動体の互いに異なる位置に設けられて、移動体の周囲を表す被写界像を出力する。第1作成手段2は、複数のカメラ1,1,…から出力された被写界像に基づいて、基準面に対する鳥瞰画像を作成する。第1表示手段3は、第1作成手段2によって作成された鳥瞰画像をモニタ画面7に表示する。検出手段4は、第1作成手段2の作成処理と並列して移動体の位置を検出する。第2作成手段5は、検出手段4の検出結果と地図情報とに基づいてナビゲーション情報を作成する。第2表示手段6は、第2作成手段5によって作成されたナビゲーション情報を第1表示手段3の表示処理に関連してモニタ画面7に表示する。
【0015】
鳥瞰画像は、移動体の互いに異なる位置に設けられた複数のカメラ1,1,…からの出力に基づいて作成され、移動体の周囲を再現する。移動体の位置と地図情報とに基づいて作成されたナビゲーション情報は、このような鳥瞰画像とともにモニタ画面7に表示される。これによって、移動体の周囲の安全性およびナビゲーション情報の両方を同一画面で確認することができ、操縦支援性能が向上する。
[実施例]
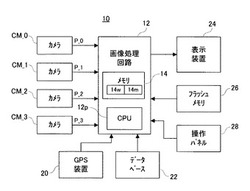
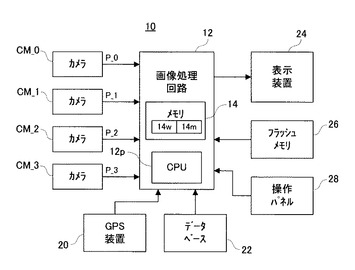
図2に示すこの実施例の操縦支援装置10は、4個のカメラCM_0〜CM_3を含む。カメラCM_0〜CM_3はそれぞれ、被写界像P_0〜P_3を1/30秒毎に出力する。出力された被写界像P_0〜P_3は、画像処理回路12に与えられる。
【0016】
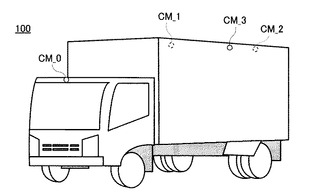
図3を参照して、カメラCM_0は、カメラCM_0の光軸が車両100の前方斜め下向きに延びる姿勢で、車両100の前上側部に設置される。カメラCM_1は、カメラCM_1の光軸が車両100の右方斜め下向きに延びる姿勢で、車両100の右上側部に設置される。カメラCM_2は、カメラCM_2の光軸が車両100の後方斜め下向きに延びる姿勢で、車両100の後上側部に設置される。カメラCM_3は、カメラCM_3の光軸が車両100の左方斜め下向きに延びる姿勢で、車両100の左上側部に設置される。車両100の周辺の被写界は、このようなカメラCM_0〜CM_3によって、路面に斜めに交差する方向から捉えられる。
【0017】
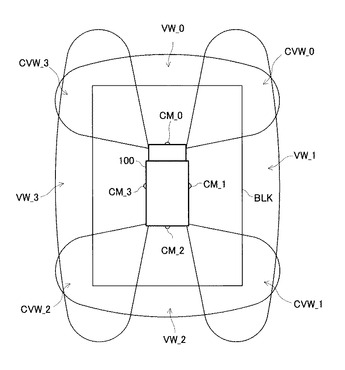
図4に示すように、カメラCM_0は車両100の前方向を捉える視野VW_0を有し、カメラCM_1は車両100の右方向を捉える視野VW_1を有し、カメラCM_2は車両100の後方向を捉える視野VW_2を有し、そしてカメラCM_3は車両100の左方向を捉える視野VW_3を有する。なお、視野VW_0およびVW_1は共通視野CVW_0を有し、視野VW_1およびVW_2は共通視野CVW_1を有し、視野VW_2およびVW_3は共通視野CVW_2を有し、そして視野VW_3およびVW_0は共通視野CVW_3を有する。
【0018】
図2に戻って、画像処理回路12に設けられたCPU12pは、カメラCM_0から出力された被写界像P_0に基づいて鳥瞰画像BEV_0を生成し、カメラCM_1から出力された被写界像P_1に基づいて鳥瞰画像BEV_1を生成する。CPU12pはまた、カメラC_2から出力された被写界像P_2に基づいて鳥瞰画像BEV_2を生成し、カメラC_3から出力された被写界像P_3に基づいて鳥瞰画像BEV_3を生成する。
【0019】
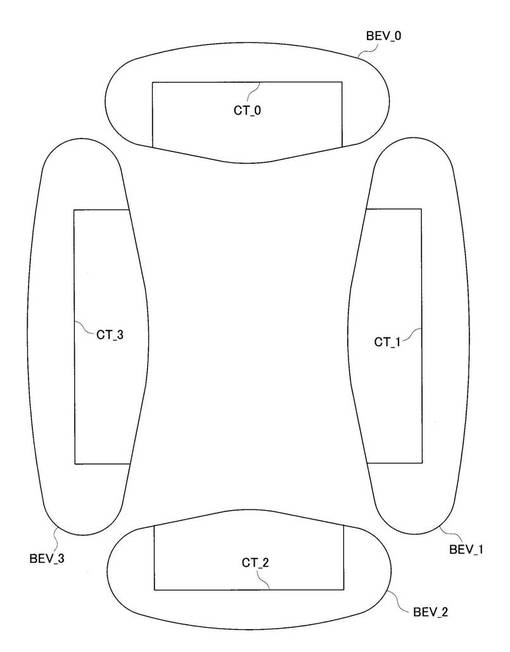
図5から分かるように、鳥瞰画像BEV_0は視野VW_0を鉛直方向に見下ろす仮想カメラによって捉えられた画像に相当し、鳥瞰画像BEV_1は視野VW_1を鉛直方向に見下ろす仮想カメラによって捉えられた画像に相当する。また、鳥瞰画像BEV_2は視野VW_2を鉛直方向に見下ろす仮想カメラによって捉えられた画像に相当し、鳥瞰画像BEV_3は視野VW_3を鉛直方向に見下ろす仮想カメラによって捉えられた画像に相当する。生成された鳥瞰画像BEV_0〜BEV_3は、メモリ14のワークエリア14wに保持される。
【0020】
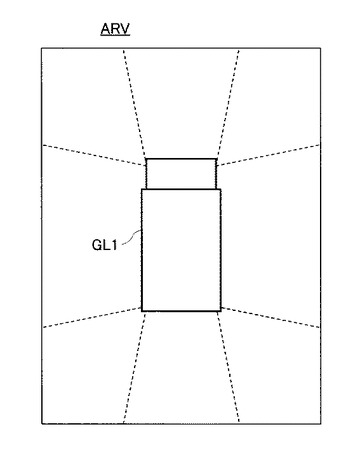
CPU12pは続いて、図4に示す再現ブロックBLKに対応する切り出し線CT_0〜CT_3を鳥瞰画像BEV_0〜BEV_3上で定義し、定義された切り出し線CT_0〜CT_3よりも内側に存在する一部の画像を合成して全周鳥瞰画像を作成し、そして車両100の上部を模した車両画像GL1を全周鳥瞰画像の中央に貼り付ける。こうして、図6に示す運転支援画像ARVがワークエリア14w上で完成する。
【0021】
CPU12pは、このような運転支援画像ARVの作成処理と並列して、GPS装置20の出力に基づいて車両100の現在位置を検出し、さらに現時点の表示モードが並列表示モードおよび多重表示モードのいずれであるかを判別する。なお、表示モードは、操作パネル28に対するモード切換操作に応答して、並列表示モードと多重表示モードとの間で切り換えられる。
【0022】
現時点の表示モードが並列表示モードであれば、CPU12pは、車両100の現在位置とその周辺を表す広域地図画像MP1をデータベース22に保存された地図データに基づいて作成する。作成された広域地図画像MP1は、メモリ14に形成された表示エリア14mの右側に図7(A)に示す要領で展開される。CPU12pは続いて、ワークエリア14wに保持された運転支援画像ARVの倍率を並列表示モードに適合するように調整し、調整された倍率を有する運転支援画像ARVを表示エリア14mの左側に図7(A)に示す要領で展開する。
【0023】
車両100の運転席に設定された表示装置24は、こうして表示エリア14mに展開された広域地図画像MP1および運転支援画像ARVを繰り返し読み出し、読み出された広域地図画像MP1および運転支援画像ARVを図7(A)に示す要領で同一画面に表示する。
【0024】
一方、現時点の表示モードが多重表示モードであれば、CPU12pは、車両100の現在位置とその周辺を表す狭域地図画像MP2をデータベース22に保存された地図データに基づいて作成する。作成された狭域地図画像MP2は、表示エリア14mの全面に図7(B)に示す要領で展開される。
【0025】
CPU12pは続いて、運転支援画像ARVの倍率を多重表示モードに適合するように調整し、GPS装置20の出力に基づいて現時点の車両100の向きを検出し、そして運転支援画像ARVに表われた路面ペイントをパターン認識によって検出する。運転支援画像ARVの多重位置は、車両100の向きと路面ペイントとに基づいて決定され、調整された倍率を有する運転支援画像ARVは決定された多重位置に図7(B)に示す要領で多重される。
【0026】
より詳しく説明すると、運転支援画像ARVの倍率は、運転支援画像ARV上の路面の幅が狭域地図画像上の路面の幅と一致するように調整される。また、運転支援画像の多重位置は、運転支援画像ARV上の路面ペイントが狭域地図画像上の路面ペイントに沿うように調整される。なお、車両100の向きは、車両画像G1が狭域地図画像上の反対車線の路面に多重される事態を回避するために参照される。
【0027】
表示装置24は、こうして表示エリア14mに展開された狭域地図画像MP2および運転支援画像ARVを繰り返し読み出し、読み出された狭域地図画像MP2および運転支援画像ARVを画面に表示する。
【0028】
図2に示す操作パネル28上で目的地の設定操作が行われると、CPU12pは、GPS装置20の出力に基づいて現在位置を検出し、検出された現在位置とデータベース22に保存された地図データとに基づいて目的地までのルートを設定する。
【0029】
現時点の表示モードが並列表示モードであれば、CPU12pは、目的地までのルートを広域で示すルート情報RT1を作成し、作成されたルート情報RT1を表示エリア14mに展開された広域地図画像MP1に多重する。一方、現時点の表示モードが多重表示モードであれば、CPU12pは、目的地までのルートを狭域で示すルート情報RT2を作成し、作成されたルート情報RT2を表示エリア14mに展開された運転支援画像ARVに多重する。ルート情報RT1は図7(A)に示す要領で多重され、ルート情報RT2は、図7(B)に示す要領で多重される。こうして多重されたルート情報RT1またはRT2も、表示装置24の画面に表示される。
【0030】
なお、この実施例では、広域地図画像MP1,狭域地図画像MP2,ルート情報RT1,ルート情報RT2を“ナビゲーション情報”と総称する。
【0031】
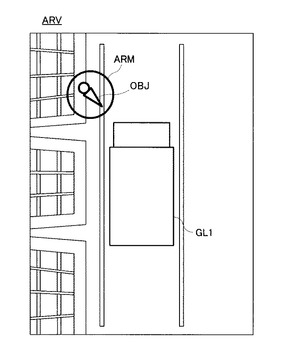
CPU12pはさらに、運転支援画像ARVを参照して、車両100の周囲から障害物を繰り返し探索する。障害物OBJが発見されると、CPU12pは、表示エリア14mに展開された運転支援画像ARVに警告情報ARMを多重する。警告情報ARMは、障害物OBJの位置に対応して図8に示す要領で多重される。こうして多重された警告情報ARMもまた、表示装置24の画面に表示される。
【0032】
CPU12pは、図9に示すルート制御タスクおよび図10〜図12に示す表示制御タスクを含む複数のタスクを並列的に実行する。なお、これらのタスクに対応する制御プログラムは、フラッシュメモリ26に記憶される。
【0033】
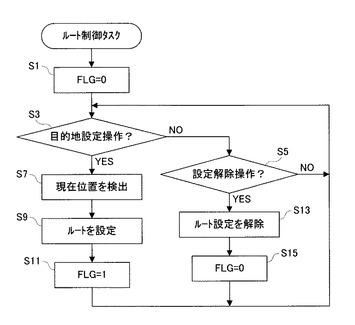
図9を参照して、ステップS1ではフラグFLGを“0”に設定する。フラグFLGは目的地の設定/非設定を識別するためのフラグであり、FLG=0が“非設定”を示す一方、FLG=1が“設定”を示す。ステップS3では操作パネル28上で目的地の設定操作が行われたか否かを判別し、ステップS5では操作パネル28上で設定解除操作が行われたか否かを判別する。
【0034】
ステップS3でYESであればステップS7に進み、GPS装置20の出力に基づいて現在位置を検出する。ステップS9では、検出された現在位置とデータベース22に保存された地図データとに基づいて目的地までのルートを設定する。ステップS9の処理が完了するとステップS11でフラグFLGを“1”に設定し、その後にステップS3に戻る。
【0035】
ステップS5でYESであればステップS13に進み、目的地までのルートの設定を解除する。ステップS13の処理が完了すると、ステップS15でフラグFLGを“0”に設定し、その後にステップS3に戻る。
【0036】
図10を参照して、ステップS21では、カメラCM_0〜CM_3から出力された被写界像P_0〜P_3に基づいて運転支援画像ARVを作成する。ステップS23では、GPS装置20の出力に基づいて車両100の現在位置を検出する。ステップS25では現時点の表示モードが並列表示モードおよび多重表示モードのいずれであるかを判別する。判別結果が並列表示モードであればステップS27に進む一方、判別結果が多重表示モードであればステップS35に進む。
【0037】
ステップS27では、車両100の現在位置とその周辺を表す広域地図画像MP1をデータベース22に保存された地図データに基づいて作成する。ステップS29では、作成された広域地図画像MP1を表示エリア14mの右側に展開する。ステップS31では、ステップS21で作成された運転支援画像ARVの倍率を並列表示モードに適合するように調整する。ステップS33では、調整された倍率を有する運転支援画像ARVを表示エリア14mの左側に展開する。ステップS33の処理が完了すると、ステップS49に進む。
【0038】
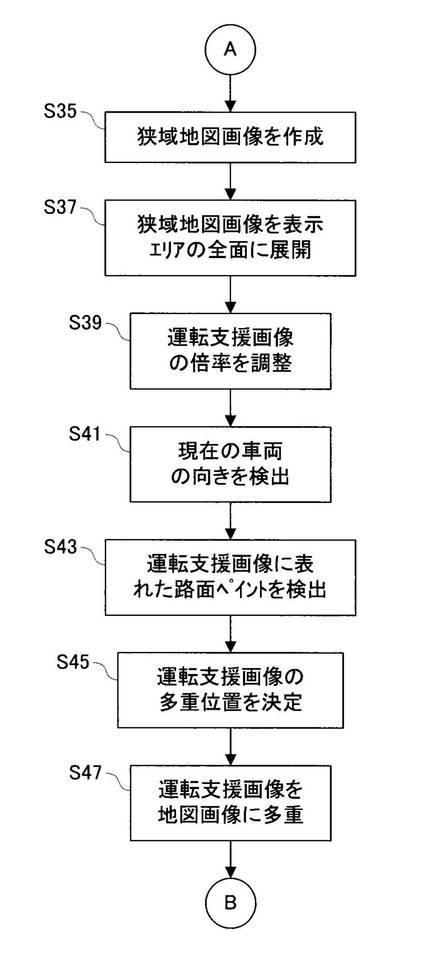
ステップS35では、車両100の現在位置とその周辺を表す狭域地図画像MP2をデータベース22に保存された地図データに基づいて作成する。ステップS37では、作成された狭域地図画像MP2を表示エリア14mの全面に展開する。ステップS39では、ステップS21で作成された運転支援画像ARVの倍率を多重表示モードに適合するように調整する。
【0039】
ステップS41ではGPS装置20の出力に基づいて現時点の車両100の向きを検出し、ステップS43では運転支援画像ARVに表われた路面ペイントをパターン認識によって検出する。ステップS45では、ステップS41で検出された車両100の向きとステップS43で検出された路面ペイントとに基づいて運転支援画像ARVの多重位置を決定する。ステップS47では、ステップS39で調整された倍率を有する運転支援画像ARVをステップS45で決定された位置に多重する。ステップS47の処理が完了すると、ステップS49に進む。
【0040】
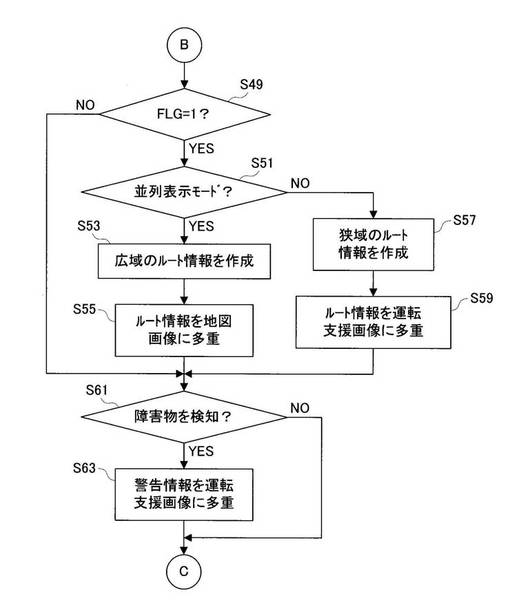
ステップS49では、フラグFLGが“1”を示すか否かをステップS49で判別する。判別結果がNOであればそのままステップS61に進み、判別結果がYESであればステップS51〜S59を経てステップS61に進む。
【0041】
ステップS51では、現時点の表示モードが並列表示モードおよび多重表示モードのいずれであるかを判別する。現時点の表示モードが並列表示モードであればステップS53に進み、目的地までのルートを広域で示すルート情報RT1を作成する。ステップS55では、作成されたルート情報RT1をステップS29で展開された広域地図画像MP1に多重する。現時点の表示モードが多重表示モードであればステップS57に進み、目的地までのルートを狭域で示すルート情報RT2を作成する。ステップS59では、作成されたルート情報RT2をステップS47で展開された運転支援画像ARVに多重する。
【0042】
ステップS61では、車両100の周囲に障害物OBJが存在するか否かを判別する。判別結果がNOであればそのままステップS21に戻る一方、判別結果がYESであればステップS63で警告情報ARMを運転支援画像ARVに多重してからステップS21に戻る。警告情報ARMは、障害物OBJの位置に対応して運転支援画像ARVに多重される。
【0043】
以上の説明から分かるように、カメラCM_0〜CM_3は、路面を移動する車両100の互いに異なる位置に設けられて、車両100の周囲を表す被写界像P_0〜P_3を出力する。CPU12pは、出力された被写界像P_0〜P_3に基づいて運転支援画像ARVを作成し(S21)、作成された運転支援画像ARVを表示装置24の画面に表示する(S31~S33, S39~S47)。CPU12pはまた、運転支援画像ARVの作成処理と並列して車両100の位置を検出し(S23)、検出された位置とデータベース22の地図データとに基づいてナビゲーション情報(地図画像,ルート情報)を作成し(S27, S35, S53, S57)、そして作成されたナビゲーション情報を表示装置24の画面に表示する(S29, S37, S55, S59)。
【0044】
運転支援画像ARVは、車両100の互いに異なる位置に設けられたカメラCM_0〜CM_3からの出力に基づいて作成され、車両100の周囲を再現する。車両100の位置と地図データとに基づいて作成されたナビゲーション情報は、このような運転支援画像ARVとともに表示装置24に表示される。これによって、車両100の周囲の安全性およびナビゲーション情報の両方を同一画面で確認することができ、操縦支援性能が向上する。
【0045】
なお、この実施例では、ルート情報RT1を広域地図画像MP1に多重し、運転支援画像ARVを狭域地図画像MP2に多重し、ルート情報RT2を運転支援画像ARVに多重し、そして警告情報ARMを運転支援画像ARVに多重するようにしている。ここで、多重画像の透過率は0%に限られるものではなく、1%〜99%の範囲で適宜調整するようにしてもよい。
【0046】
また、この実施例では、移動体として路面を走行する車両を想定しているが、この発明は海面を航行する船舶にも適用することができる。 さらに、この実施例では、モード切換操作によって代替的に選択される並列表示モードおよび多重表示モードを準備し、並列表示モードにおいて広域地図画像MP1および運転支援画像ARVを並列表示する一方、多重モードにおいて狭域地図画像MP2および運転支援画像ARVを多重表示するようにしている。
【0047】
しかし、車両100が左折または右折すべき交差点から離れているときに高域地図画像MP1をモニタ画面の全域に表示しかつ高域のルート情報RT1を高域地図画像MP1をモニタ画面の全域に表示しかつ高域のルート情報RT1を高域地図画像MP1に多重する(図13(A)参照)一方、車両100が左折または右折すべき交差点に近づいたときに高域地図画像MP1および運転支援画像ARVをモニタ画面に並列表示しかつ高域のルート情報RT1および狭域のルート情報を高域地図画像MP1および運転支援画像ARVにそれぞれ多重する(図13(B)参照)ようにしてもよい。
【0048】
この場合、図9〜図12に示すフロー図に従う処理に代えて図14〜図15に示すフロー図に従う処理が実行される。
【0049】
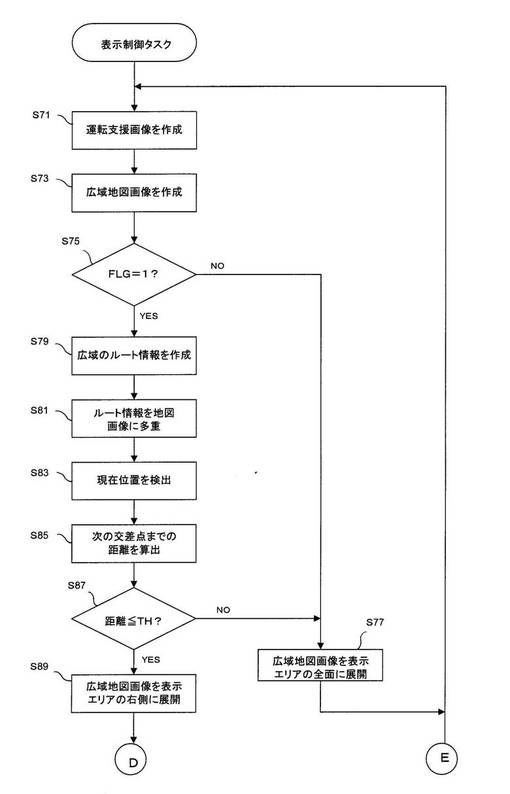
図14を参照して、ステップS71では、カメラCM_0〜CM_3から出力された被写界像P_0〜P_3に基づいて運転支援画像ARVを作成する。ステップS73では、車両100の現在位置とその周辺を表す高域地図画像MP1をデータベース22に保存された地図データに基づいて作成する。ステップS75では、フラグFLGが“1”を示すか否かを判別する。判別結果がNOであればステップS77に進み、ステップS73で作成された高域地図画像MP1を表示エリア14mの前面に展開する。ステップS77の処理が完了すると、ステップS71に戻る。
【0050】
ステップS75の判別結果がYESであれば、ステップS79に進み、GPS装置20の出力に基づいて車両100の現在位置を検出する。ステップ81では目的地までのルートを広域で示すルート情報RT1を作成し、ステップS83では作成されたルート情報RT1をステップS77で展開された広域地図画像MP1に多重する。ステップS85では、左折または右折すべき次の交差点までの距離を車両100の現在位置、広域地図画像MP1およびルート情報RT1に基づいて算出する。ステップS87では算出された距離が閾値TH(=たとえば5m)以下であるか否かを判別し、判別結果がNOであればステップS77の処理を経てステップS71に戻る一方、判別結果がYSEであればステップS89に進む。
【0051】
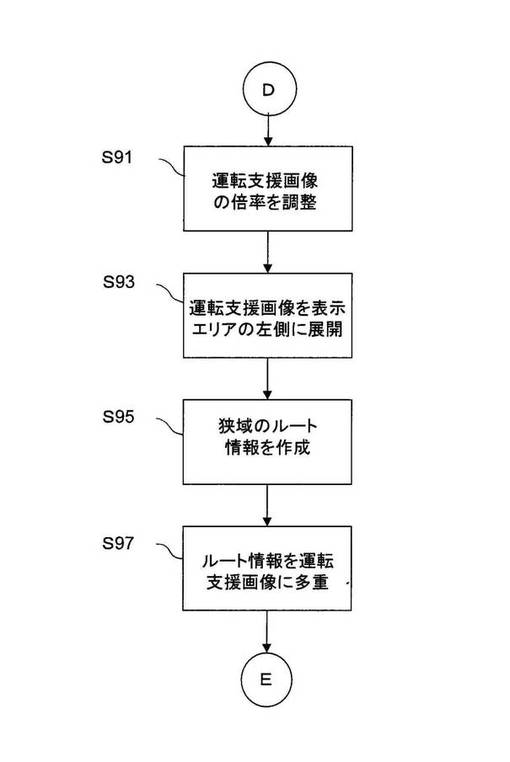
ステップS89では、ステップS73で作成された広域地図画像MP1を表示エリア14mの右側に展開する。ステップS91ではステップS71で作成された運転支援画像ARVの倍率を調整し、ステップS93では調整された倍率を有する運転支援画像ARVを表示エリア14mの左側に展開する。ステップS95では目的地までのルートを狭域で示すルート情報RT2を作成し、ステップS97では作成されたルート情報RT2をステップS93で展開された運転支援画像ARVに多重する。多重処理が完了すると、ステップS71に戻る。
【0052】
このように、運転支援画像ARVは、車両100から左折または右折すべき交差点までの距離が閾値THを下回るタイミング(つまり、車両100が交差転に差し掛かるタイミング)でモニタ画面に並列表示される。運転手は、交差点の右折時または左折時のような車両100の周囲の安全確認が重要な情況で、車両100の周辺をモニタ画面を通して視認できる。こうして、運転支援性能が向上する。
【符号の説明】
【0053】
10 …操縦支援装置
CM_0〜CM_3 …カメラ
12 …画像処理回路
14 …メモリ
12p …CPU
20 …GPS装置
18 …表示装置
26 …フラッシュメモリ
100 …車両
【技術分野】
【0001】
この発明は、画像処理装置に関し、特に、移動体に設けられたカメラによって捉えられた被写界を表す画像をナビゲーション情報とともに画面に表示する、画像処理装置に関する。
【背景技術】
【0002】
この種の装置の一例が、特許文献1に開示されている。この背景技術によれば、自動車の進行方向の景色は、自動車のノーズに取り付けられたカメラによって捉えられる。画像合成部は、ナビゲーション情報要素をカメラによって捉えられた実写画像に合成し、合成画像を表示器に表示する。これによって、運転手は自動車の現在位置や進行経路をより感覚的に把握することができる。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開平11−108684号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかし、ナビゲーション情報要素と合成される実写画像は、自動車の進行方向の景色を表すに過ぎない。このため、背景技術では、操縦支援性能に限界がある。
【0005】
それゆえに、この発明の主たる目的は、操縦支援性能を向上させることができる、画像処理装置を提供することである。
【課題を解決するための手段】
【0006】
この発明に従う画像処理装置(10:実施例で相当する参照符号。以下同じ)は、基準面を移動する移動体(100)の互いに異なる位置に設けられて移動体の周囲を表す被写界像を出力する複数のカメラ(CM_0~CM_3)、複数のカメラから出力された被写界像に基づいて基準面に対する鳥瞰画像を作成する第1作成手段(S21)、第1作成手段によって作成された鳥瞰画像をモニタ画面に表示する第1表示手段(S31~S33, S39~S47)、第1作成手段の作成処理と並列して移動体の位置を検出する検出手段(S23)、検出手段の検出結果と地図情報とに基づいてナビゲーション情報を作成する第2作成手段(S27, S35, S53, S57)、および第2作成手段によって作成されたナビゲーション情報を第1表示手段の表示処理に関連してモニタ画面に表示する第2表示手段(S29, S37, S55, S59)を備える。
【0007】
好ましくは、ナビゲーション情報は地図画像を含み、第1表示手段は鳥瞰画像を地図画像に多重する第1多重手段(S47)を含む。
【0008】
さらに好ましくは、移動体および基準面はそれぞれ車両および路面に相当し、第1表示手段は路面ペイントを参照して鳥瞰画像の多重位置を決定する決定手段(S43, S45)をさらに含む。より好ましくは、決定手段は移動体の向きをさらに参照して多重位置を決定する。
【0009】
好ましくは、ナビゲーション情報は目的地までのルートを可視的に示すルート情報を含み、第2表示手段はルート情報を地図画像および/または鳥瞰画像に多重する第2多重手段(S55,S59)を含む。
【0010】
好ましくは、移動体の周辺から障害物が検出されたとき警告を発生する発生手段(S61~S63)がさらに備えられる。
【発明の効果】
【0011】
この発明によれば、鳥瞰画像は、移動体の互いに異なる位置に設けられた複数のカメラからの出力に基づいて作成され、移動体の周囲を再現する。移動体の位置と地図情報とに基づいて作成されたナビゲーション情報は、このような鳥瞰画像とともにモニタ画面に表示される。これによって、移動体の周囲の安全性およびナビゲーション情報の両方を同一画面で確認することができ、操縦支援性能が向上する。
【0012】
この発明の上述の目的,その他の目的,特徴および利点は、図面を参照して行う以下の実施例の詳細な説明から一層明らかとなろう。
【図面の簡単な説明】
【0013】
【図1】この発明の基本的構成を示すブロック図である。
【図2】この発明の一実施例の構成を示すブロック図である。
【図3】図2実施例が搭載された車両の一例を示す斜視図である。
【図4】車両に取り付けられた複数のカメラによって捉えられる視野を示す図解図である。
【図5】カメラの出力に基づく鳥瞰画像の作成動作の一部を示す図解図である。
【図6】表示装置によって表示される運転支援画像の一例を示す図解図である。
【図7】(A)は並列表示モードに対応して表示される運転支援画像の一例を示す図解図であり、(B)は多重表示モードに対応して表示される運転支援画像の一例を示す図解図である。
【図8】障害物が検知されたときに表示される警告の一例を示す図解図である。
【図9】図2実施例に適用されるCPUの動作の一部を示すフロー図である。
【図10】図2実施例に適用されるCPUの動作の他の一部を示すフロー図である。
【図11】図2実施例に適用されるCPUの動作のその他の一部を示すフロー図である。
【図12】図2実施例に適用されるCPUの動作のさらにその他の一部を示すフロー図である。
【図13】(A)は他の実施例において表示される運転支援画像の一例を示す図解図である。(B)は他の実施例において表示される運転支援画像の一例を示す図解図である。
【図14】は他の実施例に適用されるCPUの動作の一部を示すフロー図である。
【図15】は他の実施例に適用されるCPUの動作の一部を示すフロー図である。
【発明を実施するための形態】
【0014】
以下、この発明の実施の形態を図面を参照しながら説明する。
[基本的構成]
図1を参照して、この発明の画像処理装置は、基本的に次のように構成される。複数のカメラ1,1,…は、基準面を移動する移動体の互いに異なる位置に設けられて、移動体の周囲を表す被写界像を出力する。第1作成手段2は、複数のカメラ1,1,…から出力された被写界像に基づいて、基準面に対する鳥瞰画像を作成する。第1表示手段3は、第1作成手段2によって作成された鳥瞰画像をモニタ画面7に表示する。検出手段4は、第1作成手段2の作成処理と並列して移動体の位置を検出する。第2作成手段5は、検出手段4の検出結果と地図情報とに基づいてナビゲーション情報を作成する。第2表示手段6は、第2作成手段5によって作成されたナビゲーション情報を第1表示手段3の表示処理に関連してモニタ画面7に表示する。
【0015】
鳥瞰画像は、移動体の互いに異なる位置に設けられた複数のカメラ1,1,…からの出力に基づいて作成され、移動体の周囲を再現する。移動体の位置と地図情報とに基づいて作成されたナビゲーション情報は、このような鳥瞰画像とともにモニタ画面7に表示される。これによって、移動体の周囲の安全性およびナビゲーション情報の両方を同一画面で確認することができ、操縦支援性能が向上する。
[実施例]
図2に示すこの実施例の操縦支援装置10は、4個のカメラCM_0〜CM_3を含む。カメラCM_0〜CM_3はそれぞれ、被写界像P_0〜P_3を1/30秒毎に出力する。出力された被写界像P_0〜P_3は、画像処理回路12に与えられる。
【0016】
図3を参照して、カメラCM_0は、カメラCM_0の光軸が車両100の前方斜め下向きに延びる姿勢で、車両100の前上側部に設置される。カメラCM_1は、カメラCM_1の光軸が車両100の右方斜め下向きに延びる姿勢で、車両100の右上側部に設置される。カメラCM_2は、カメラCM_2の光軸が車両100の後方斜め下向きに延びる姿勢で、車両100の後上側部に設置される。カメラCM_3は、カメラCM_3の光軸が車両100の左方斜め下向きに延びる姿勢で、車両100の左上側部に設置される。車両100の周辺の被写界は、このようなカメラCM_0〜CM_3によって、路面に斜めに交差する方向から捉えられる。
【0017】
図4に示すように、カメラCM_0は車両100の前方向を捉える視野VW_0を有し、カメラCM_1は車両100の右方向を捉える視野VW_1を有し、カメラCM_2は車両100の後方向を捉える視野VW_2を有し、そしてカメラCM_3は車両100の左方向を捉える視野VW_3を有する。なお、視野VW_0およびVW_1は共通視野CVW_0を有し、視野VW_1およびVW_2は共通視野CVW_1を有し、視野VW_2およびVW_3は共通視野CVW_2を有し、そして視野VW_3およびVW_0は共通視野CVW_3を有する。
【0018】
図2に戻って、画像処理回路12に設けられたCPU12pは、カメラCM_0から出力された被写界像P_0に基づいて鳥瞰画像BEV_0を生成し、カメラCM_1から出力された被写界像P_1に基づいて鳥瞰画像BEV_1を生成する。CPU12pはまた、カメラC_2から出力された被写界像P_2に基づいて鳥瞰画像BEV_2を生成し、カメラC_3から出力された被写界像P_3に基づいて鳥瞰画像BEV_3を生成する。
【0019】
図5から分かるように、鳥瞰画像BEV_0は視野VW_0を鉛直方向に見下ろす仮想カメラによって捉えられた画像に相当し、鳥瞰画像BEV_1は視野VW_1を鉛直方向に見下ろす仮想カメラによって捉えられた画像に相当する。また、鳥瞰画像BEV_2は視野VW_2を鉛直方向に見下ろす仮想カメラによって捉えられた画像に相当し、鳥瞰画像BEV_3は視野VW_3を鉛直方向に見下ろす仮想カメラによって捉えられた画像に相当する。生成された鳥瞰画像BEV_0〜BEV_3は、メモリ14のワークエリア14wに保持される。
【0020】
CPU12pは続いて、図4に示す再現ブロックBLKに対応する切り出し線CT_0〜CT_3を鳥瞰画像BEV_0〜BEV_3上で定義し、定義された切り出し線CT_0〜CT_3よりも内側に存在する一部の画像を合成して全周鳥瞰画像を作成し、そして車両100の上部を模した車両画像GL1を全周鳥瞰画像の中央に貼り付ける。こうして、図6に示す運転支援画像ARVがワークエリア14w上で完成する。
【0021】
CPU12pは、このような運転支援画像ARVの作成処理と並列して、GPS装置20の出力に基づいて車両100の現在位置を検出し、さらに現時点の表示モードが並列表示モードおよび多重表示モードのいずれであるかを判別する。なお、表示モードは、操作パネル28に対するモード切換操作に応答して、並列表示モードと多重表示モードとの間で切り換えられる。
【0022】
現時点の表示モードが並列表示モードであれば、CPU12pは、車両100の現在位置とその周辺を表す広域地図画像MP1をデータベース22に保存された地図データに基づいて作成する。作成された広域地図画像MP1は、メモリ14に形成された表示エリア14mの右側に図7(A)に示す要領で展開される。CPU12pは続いて、ワークエリア14wに保持された運転支援画像ARVの倍率を並列表示モードに適合するように調整し、調整された倍率を有する運転支援画像ARVを表示エリア14mの左側に図7(A)に示す要領で展開する。
【0023】
車両100の運転席に設定された表示装置24は、こうして表示エリア14mに展開された広域地図画像MP1および運転支援画像ARVを繰り返し読み出し、読み出された広域地図画像MP1および運転支援画像ARVを図7(A)に示す要領で同一画面に表示する。
【0024】
一方、現時点の表示モードが多重表示モードであれば、CPU12pは、車両100の現在位置とその周辺を表す狭域地図画像MP2をデータベース22に保存された地図データに基づいて作成する。作成された狭域地図画像MP2は、表示エリア14mの全面に図7(B)に示す要領で展開される。
【0025】
CPU12pは続いて、運転支援画像ARVの倍率を多重表示モードに適合するように調整し、GPS装置20の出力に基づいて現時点の車両100の向きを検出し、そして運転支援画像ARVに表われた路面ペイントをパターン認識によって検出する。運転支援画像ARVの多重位置は、車両100の向きと路面ペイントとに基づいて決定され、調整された倍率を有する運転支援画像ARVは決定された多重位置に図7(B)に示す要領で多重される。
【0026】
より詳しく説明すると、運転支援画像ARVの倍率は、運転支援画像ARV上の路面の幅が狭域地図画像上の路面の幅と一致するように調整される。また、運転支援画像の多重位置は、運転支援画像ARV上の路面ペイントが狭域地図画像上の路面ペイントに沿うように調整される。なお、車両100の向きは、車両画像G1が狭域地図画像上の反対車線の路面に多重される事態を回避するために参照される。
【0027】
表示装置24は、こうして表示エリア14mに展開された狭域地図画像MP2および運転支援画像ARVを繰り返し読み出し、読み出された狭域地図画像MP2および運転支援画像ARVを画面に表示する。
【0028】
図2に示す操作パネル28上で目的地の設定操作が行われると、CPU12pは、GPS装置20の出力に基づいて現在位置を検出し、検出された現在位置とデータベース22に保存された地図データとに基づいて目的地までのルートを設定する。
【0029】
現時点の表示モードが並列表示モードであれば、CPU12pは、目的地までのルートを広域で示すルート情報RT1を作成し、作成されたルート情報RT1を表示エリア14mに展開された広域地図画像MP1に多重する。一方、現時点の表示モードが多重表示モードであれば、CPU12pは、目的地までのルートを狭域で示すルート情報RT2を作成し、作成されたルート情報RT2を表示エリア14mに展開された運転支援画像ARVに多重する。ルート情報RT1は図7(A)に示す要領で多重され、ルート情報RT2は、図7(B)に示す要領で多重される。こうして多重されたルート情報RT1またはRT2も、表示装置24の画面に表示される。
【0030】
なお、この実施例では、広域地図画像MP1,狭域地図画像MP2,ルート情報RT1,ルート情報RT2を“ナビゲーション情報”と総称する。
【0031】
CPU12pはさらに、運転支援画像ARVを参照して、車両100の周囲から障害物を繰り返し探索する。障害物OBJが発見されると、CPU12pは、表示エリア14mに展開された運転支援画像ARVに警告情報ARMを多重する。警告情報ARMは、障害物OBJの位置に対応して図8に示す要領で多重される。こうして多重された警告情報ARMもまた、表示装置24の画面に表示される。
【0032】
CPU12pは、図9に示すルート制御タスクおよび図10〜図12に示す表示制御タスクを含む複数のタスクを並列的に実行する。なお、これらのタスクに対応する制御プログラムは、フラッシュメモリ26に記憶される。
【0033】
図9を参照して、ステップS1ではフラグFLGを“0”に設定する。フラグFLGは目的地の設定/非設定を識別するためのフラグであり、FLG=0が“非設定”を示す一方、FLG=1が“設定”を示す。ステップS3では操作パネル28上で目的地の設定操作が行われたか否かを判別し、ステップS5では操作パネル28上で設定解除操作が行われたか否かを判別する。
【0034】
ステップS3でYESであればステップS7に進み、GPS装置20の出力に基づいて現在位置を検出する。ステップS9では、検出された現在位置とデータベース22に保存された地図データとに基づいて目的地までのルートを設定する。ステップS9の処理が完了するとステップS11でフラグFLGを“1”に設定し、その後にステップS3に戻る。
【0035】
ステップS5でYESであればステップS13に進み、目的地までのルートの設定を解除する。ステップS13の処理が完了すると、ステップS15でフラグFLGを“0”に設定し、その後にステップS3に戻る。
【0036】
図10を参照して、ステップS21では、カメラCM_0〜CM_3から出力された被写界像P_0〜P_3に基づいて運転支援画像ARVを作成する。ステップS23では、GPS装置20の出力に基づいて車両100の現在位置を検出する。ステップS25では現時点の表示モードが並列表示モードおよび多重表示モードのいずれであるかを判別する。判別結果が並列表示モードであればステップS27に進む一方、判別結果が多重表示モードであればステップS35に進む。
【0037】
ステップS27では、車両100の現在位置とその周辺を表す広域地図画像MP1をデータベース22に保存された地図データに基づいて作成する。ステップS29では、作成された広域地図画像MP1を表示エリア14mの右側に展開する。ステップS31では、ステップS21で作成された運転支援画像ARVの倍率を並列表示モードに適合するように調整する。ステップS33では、調整された倍率を有する運転支援画像ARVを表示エリア14mの左側に展開する。ステップS33の処理が完了すると、ステップS49に進む。
【0038】
ステップS35では、車両100の現在位置とその周辺を表す狭域地図画像MP2をデータベース22に保存された地図データに基づいて作成する。ステップS37では、作成された狭域地図画像MP2を表示エリア14mの全面に展開する。ステップS39では、ステップS21で作成された運転支援画像ARVの倍率を多重表示モードに適合するように調整する。
【0039】
ステップS41ではGPS装置20の出力に基づいて現時点の車両100の向きを検出し、ステップS43では運転支援画像ARVに表われた路面ペイントをパターン認識によって検出する。ステップS45では、ステップS41で検出された車両100の向きとステップS43で検出された路面ペイントとに基づいて運転支援画像ARVの多重位置を決定する。ステップS47では、ステップS39で調整された倍率を有する運転支援画像ARVをステップS45で決定された位置に多重する。ステップS47の処理が完了すると、ステップS49に進む。
【0040】
ステップS49では、フラグFLGが“1”を示すか否かをステップS49で判別する。判別結果がNOであればそのままステップS61に進み、判別結果がYESであればステップS51〜S59を経てステップS61に進む。
【0041】
ステップS51では、現時点の表示モードが並列表示モードおよび多重表示モードのいずれであるかを判別する。現時点の表示モードが並列表示モードであればステップS53に進み、目的地までのルートを広域で示すルート情報RT1を作成する。ステップS55では、作成されたルート情報RT1をステップS29で展開された広域地図画像MP1に多重する。現時点の表示モードが多重表示モードであればステップS57に進み、目的地までのルートを狭域で示すルート情報RT2を作成する。ステップS59では、作成されたルート情報RT2をステップS47で展開された運転支援画像ARVに多重する。
【0042】
ステップS61では、車両100の周囲に障害物OBJが存在するか否かを判別する。判別結果がNOであればそのままステップS21に戻る一方、判別結果がYESであればステップS63で警告情報ARMを運転支援画像ARVに多重してからステップS21に戻る。警告情報ARMは、障害物OBJの位置に対応して運転支援画像ARVに多重される。
【0043】
以上の説明から分かるように、カメラCM_0〜CM_3は、路面を移動する車両100の互いに異なる位置に設けられて、車両100の周囲を表す被写界像P_0〜P_3を出力する。CPU12pは、出力された被写界像P_0〜P_3に基づいて運転支援画像ARVを作成し(S21)、作成された運転支援画像ARVを表示装置24の画面に表示する(S31~S33, S39~S47)。CPU12pはまた、運転支援画像ARVの作成処理と並列して車両100の位置を検出し(S23)、検出された位置とデータベース22の地図データとに基づいてナビゲーション情報(地図画像,ルート情報)を作成し(S27, S35, S53, S57)、そして作成されたナビゲーション情報を表示装置24の画面に表示する(S29, S37, S55, S59)。
【0044】
運転支援画像ARVは、車両100の互いに異なる位置に設けられたカメラCM_0〜CM_3からの出力に基づいて作成され、車両100の周囲を再現する。車両100の位置と地図データとに基づいて作成されたナビゲーション情報は、このような運転支援画像ARVとともに表示装置24に表示される。これによって、車両100の周囲の安全性およびナビゲーション情報の両方を同一画面で確認することができ、操縦支援性能が向上する。
【0045】
なお、この実施例では、ルート情報RT1を広域地図画像MP1に多重し、運転支援画像ARVを狭域地図画像MP2に多重し、ルート情報RT2を運転支援画像ARVに多重し、そして警告情報ARMを運転支援画像ARVに多重するようにしている。ここで、多重画像の透過率は0%に限られるものではなく、1%〜99%の範囲で適宜調整するようにしてもよい。
【0046】
また、この実施例では、移動体として路面を走行する車両を想定しているが、この発明は海面を航行する船舶にも適用することができる。 さらに、この実施例では、モード切換操作によって代替的に選択される並列表示モードおよび多重表示モードを準備し、並列表示モードにおいて広域地図画像MP1および運転支援画像ARVを並列表示する一方、多重モードにおいて狭域地図画像MP2および運転支援画像ARVを多重表示するようにしている。
【0047】
しかし、車両100が左折または右折すべき交差点から離れているときに高域地図画像MP1をモニタ画面の全域に表示しかつ高域のルート情報RT1を高域地図画像MP1をモニタ画面の全域に表示しかつ高域のルート情報RT1を高域地図画像MP1に多重する(図13(A)参照)一方、車両100が左折または右折すべき交差点に近づいたときに高域地図画像MP1および運転支援画像ARVをモニタ画面に並列表示しかつ高域のルート情報RT1および狭域のルート情報を高域地図画像MP1および運転支援画像ARVにそれぞれ多重する(図13(B)参照)ようにしてもよい。
【0048】
この場合、図9〜図12に示すフロー図に従う処理に代えて図14〜図15に示すフロー図に従う処理が実行される。
【0049】
図14を参照して、ステップS71では、カメラCM_0〜CM_3から出力された被写界像P_0〜P_3に基づいて運転支援画像ARVを作成する。ステップS73では、車両100の現在位置とその周辺を表す高域地図画像MP1をデータベース22に保存された地図データに基づいて作成する。ステップS75では、フラグFLGが“1”を示すか否かを判別する。判別結果がNOであればステップS77に進み、ステップS73で作成された高域地図画像MP1を表示エリア14mの前面に展開する。ステップS77の処理が完了すると、ステップS71に戻る。
【0050】
ステップS75の判別結果がYESであれば、ステップS79に進み、GPS装置20の出力に基づいて車両100の現在位置を検出する。ステップ81では目的地までのルートを広域で示すルート情報RT1を作成し、ステップS83では作成されたルート情報RT1をステップS77で展開された広域地図画像MP1に多重する。ステップS85では、左折または右折すべき次の交差点までの距離を車両100の現在位置、広域地図画像MP1およびルート情報RT1に基づいて算出する。ステップS87では算出された距離が閾値TH(=たとえば5m)以下であるか否かを判別し、判別結果がNOであればステップS77の処理を経てステップS71に戻る一方、判別結果がYSEであればステップS89に進む。
【0051】
ステップS89では、ステップS73で作成された広域地図画像MP1を表示エリア14mの右側に展開する。ステップS91ではステップS71で作成された運転支援画像ARVの倍率を調整し、ステップS93では調整された倍率を有する運転支援画像ARVを表示エリア14mの左側に展開する。ステップS95では目的地までのルートを狭域で示すルート情報RT2を作成し、ステップS97では作成されたルート情報RT2をステップS93で展開された運転支援画像ARVに多重する。多重処理が完了すると、ステップS71に戻る。
【0052】
このように、運転支援画像ARVは、車両100から左折または右折すべき交差点までの距離が閾値THを下回るタイミング(つまり、車両100が交差転に差し掛かるタイミング)でモニタ画面に並列表示される。運転手は、交差点の右折時または左折時のような車両100の周囲の安全確認が重要な情況で、車両100の周辺をモニタ画面を通して視認できる。こうして、運転支援性能が向上する。
【符号の説明】
【0053】
10 …操縦支援装置
CM_0〜CM_3 …カメラ
12 …画像処理回路
14 …メモリ
12p …CPU
20 …GPS装置
18 …表示装置
26 …フラッシュメモリ
100 …車両
【特許請求の範囲】
【請求項1】
基準面を移動する移動体の互いに異なる位置に設けられて前記移動体の周囲を表す被写界像を出力する複数のカメラ、
前記複数のカメラから出力された被写界像に基づいて前記基準面に対する鳥瞰画像を作成する第1作成手段、
前記第1作成手段によって作成された鳥瞰画像をモニタ画面に表示する第1表示手段、
前記第1作成手段の作成処理と並列して前記移動体の位置を検出する検出手段、
前記検出手段の検出結果と地図情報とに基づいてナビゲーション情報を作成する第2作成手段、および
前記第2作成手段によって作成されたナビゲーション情報を前記第1表示手段の表示処理に関連して前記モニタ画面に表示する第2表示手段を備える、画像処理装置。
【請求項2】
前記ナビゲーション情報は地図画像を含み、
前記第1表示手段は前記鳥瞰画像を前記地図画像に多重する第1多重手段を含む、請求項1記載の画像処理装置。
【請求項3】
前記移動体および前記基準面はそれぞれ車両および路面に相当し、
前記第1表示手段は路面ペイントを参照して前記鳥瞰画像の多重位置を決定する決定手段をさらに含む、請求項2記載の画像処理装置。
【請求項4】
前記決定手段は前記移動体の向きをさらに参照して前記多重位置を決定する、請求項3記載の画像処理装置。
【請求項5】
前記ナビゲーション情報は目的地までのルートを可視的に示すルート情報を含み、
前記第2表示手段は前記ルート情報を前記地図画像および/または前記鳥瞰画像に多重する第2多重手段を含む、請求項1ないし4のいずれかに記載の画像処理装置。
【請求項6】
前記移動体の周辺から障害物が検出されたとき警告を発生する発生手段をさらに備える、請求項1ないし5のいずれかに記載の画像処理装置。
【請求項7】
前記移動体および前記基準面はそれぞれ車両および路面に相当し、
前記検出手段の検出結果と地図情報にとに基づいて前記移動体から左折または右折すべき交差点までの距離を算出する算出手段および
前記算出手段によって算出された距離に応じて前記第1表示手段の表示処理を許可または制限する制御手段を備える請求項1記載の画像処理装置。
【請求項1】
基準面を移動する移動体の互いに異なる位置に設けられて前記移動体の周囲を表す被写界像を出力する複数のカメラ、
前記複数のカメラから出力された被写界像に基づいて前記基準面に対する鳥瞰画像を作成する第1作成手段、
前記第1作成手段によって作成された鳥瞰画像をモニタ画面に表示する第1表示手段、
前記第1作成手段の作成処理と並列して前記移動体の位置を検出する検出手段、
前記検出手段の検出結果と地図情報とに基づいてナビゲーション情報を作成する第2作成手段、および
前記第2作成手段によって作成されたナビゲーション情報を前記第1表示手段の表示処理に関連して前記モニタ画面に表示する第2表示手段を備える、画像処理装置。
【請求項2】
前記ナビゲーション情報は地図画像を含み、
前記第1表示手段は前記鳥瞰画像を前記地図画像に多重する第1多重手段を含む、請求項1記載の画像処理装置。
【請求項3】
前記移動体および前記基準面はそれぞれ車両および路面に相当し、
前記第1表示手段は路面ペイントを参照して前記鳥瞰画像の多重位置を決定する決定手段をさらに含む、請求項2記載の画像処理装置。
【請求項4】
前記決定手段は前記移動体の向きをさらに参照して前記多重位置を決定する、請求項3記載の画像処理装置。
【請求項5】
前記ナビゲーション情報は目的地までのルートを可視的に示すルート情報を含み、
前記第2表示手段は前記ルート情報を前記地図画像および/または前記鳥瞰画像に多重する第2多重手段を含む、請求項1ないし4のいずれかに記載の画像処理装置。
【請求項6】
前記移動体の周辺から障害物が検出されたとき警告を発生する発生手段をさらに備える、請求項1ないし5のいずれかに記載の画像処理装置。
【請求項7】
前記移動体および前記基準面はそれぞれ車両および路面に相当し、
前記検出手段の検出結果と地図情報にとに基づいて前記移動体から左折または右折すべき交差点までの距離を算出する算出手段および
前記算出手段によって算出された距離に応じて前記第1表示手段の表示処理を許可または制限する制御手段を備える請求項1記載の画像処理装置。
【図1】



【図2】
【図3】
【図4】
【図6】
【図8】
【図9】
【図5】
【図7】
【図10】

【図11】
【図12】
【図13】
【図14】
【図15】
【図2】
【図3】
【図4】
【図6】
【図8】
【図9】
【図5】
【図7】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【公開番号】特開2011−27730(P2011−27730A)
【公開日】平成23年2月10日(2011.2.10)
【国際特許分類】
【出願番号】特願2010−147168(P2010−147168)
【出願日】平成22年6月29日(2010.6.29)
【出願人】(000001889)三洋電機株式会社 (18,308)
【Fターム(参考)】
【公開日】平成23年2月10日(2011.2.10)
【国際特許分類】
【出願日】平成22年6月29日(2010.6.29)
【出願人】(000001889)三洋電機株式会社 (18,308)
【Fターム(参考)】
[ Back to top ]