
画像取得装置
【課題】変動状態のスペクトルカメラにより精度の高い光スペクトル画像を取得可能な、或は光スペクトル特性付の3次元データを取得可能な画像取得装置を提供する。
【解決手段】時系列に連続するフレーム画像で構成される動画像を取得する第1カメラ14と、第1カメラと既知の関係にあり、測定対象の光スペクトル画像を複数取得する第2カメラ15と、撮像制御装置21とを具備し、撮像制御装置21は、1つのフレーム画像から複数の特徴点を抽出し、特徴点を時系列に連続するフレーム画像中に順次特定し、複数の光スペクトル画像と対応するフレーム画像について特徴点に基づきフレーム画像間の画像マッチングを行い、該画像マッチングで得られた条件に基づき複数の光スペクトル画像を合成する様構成した。
【解決手段】時系列に連続するフレーム画像で構成される動画像を取得する第1カメラ14と、第1カメラと既知の関係にあり、測定対象の光スペクトル画像を複数取得する第2カメラ15と、撮像制御装置21とを具備し、撮像制御装置21は、1つのフレーム画像から複数の特徴点を抽出し、特徴点を時系列に連続するフレーム画像中に順次特定し、複数の光スペクトル画像と対応するフレーム画像について特徴点に基づきフレーム画像間の画像マッチングを行い、該画像マッチングで得られた条件に基づき複数の光スペクトル画像を合成する様構成した。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、測定対象物の画像及び3次元データを取得すると共に3次元データに対応する光スペクトル特性を取得する画像取得装置に関するものである。
【背景技術】
【0002】
測定対象物を写真測量する等して、測定対象物の3次元データを取得するのと同時に測定対象物の画像を取得し、画像付の3次元データを取得することが行われている。
【0003】
従来の3次元測定装置で得られる画像付の3次元データは、地図データ等に用いられており、使用者の視認性を高める等の効果が得られている。
【0004】
一方、得られるデータは測定対象物の3次元位置データであり、得られる情報としては測定対象物の3次元位置である。
【0005】
測定対象物について測定を行う場合、より多くの情報が得られることが望まれ、測定対象物の位置情報のみならず、測定対象物の性状についての情報が得られることが望ましい。
【0006】
例えば、農作物の発育状態についての情報が得られれば、農作業について適切な判断、適切な処置が可能となり、或は地表に露出した鉱物の種類等が判断できれば、適切な土木工法の選択が可能となる等である。
【先行技術文献】
【特許文献】
【0007】
【特許文献1】特開2011−89895号公報
【特許文献2】特開2006−10376号公報
【発明の概要】
【発明が解決しようとする課題】
【0008】
本発明は斯かる実情に鑑み、変動状態のスペクトルカメラにより精度の高い光スペクトル画像を取得可能な、或は光スペクトル特性付の3次元データを取得可能な画像取得装置を提供するものである。
【課題を解決するための手段】
【0009】
本発明は、時系列に連続するフレーム画像で構成される動画像を取得する第1カメラと、該第1カメラと既知の関係にあり、測定対象の光スペクトル画像を複数取得する第2カメラと、撮像制御装置とを具備し、該撮像制御装置は、1つの前記フレーム画像から複数の特徴点を抽出し、該特徴点を時系列に連続するフレーム画像中に順次特定し、前記複数の光スペクトル画像と対応するフレーム画像について前記特徴点に基づきフレーム画像間の画像マッチングを行い、該画像マッチングで得られた条件に基づき前記複数の光スペクトル画像を合成する様構成した画像取得装置に係るものである。
【0010】
又本発明は、前記フレーム画像と前記光スペクトル画像とが同期して取得され、各フレーム画像の特徴点のフレーム画像上の位置に基づいて各光スペクトル画像の相対的な位置合わせを行う画像取得装置に係るものである。
【0011】
又本発明は、前記第1カメラの動画像の第1フレーム画像から少なくとも5点の特徴点が抽出され、該少なくとも5点の特徴点が画像トラッキングにより第nフレーム画像中に特定され、両画像の特徴点に基づきステレオマッチングが行われ、前記測定対象の3次元モデルを形成する画像取得装置に係るものである。
【0012】
又本発明は、前記3次元モデルに前記合成した光スペクトル画像の波長成分の情報を重合する画像取得装置に係るものである。
【0013】
又本発明は、前記第2カメラが取得する光スペクトル画像は、所定の波長領域に関する2次元画像として取得される画像取得装置に係るものである。
【0014】
又本発明は、飛行体と、該飛行体に設けられたGPS装置と、該飛行体の飛行を制御する制御装置と、該飛行体に搭載され、時系列に連続するフレーム画像で構成される動画像を取得する第1カメラと、該第1カメラと既知の関係に設けられ、測定対象の光スペクトル画像を取得する第2カメラと、撮像制御装置とを具備し、前記飛行体は第1地点で静止飛行を行い、静止飛行後第2地点に移動し、該第2地点で静止飛行を行い、前記GPS装置は、第1地点、第2地点の地心座標系の位置を測定し、前記第1カメラは第1地点の静止画像を取得すると共に第1地点から第2地点に移動中に動画像を取得し、更に第2地点の静止画像を取得し、前記第2カメラは第1地点の静止飛行中に所定波長領域の光スペクトル画像を複数取得すると共に第2地点の静止飛行中に所定波長領域の光スペクトル画像を複数取得し、前記撮像制御装置は、第1地点の静止画像から複数の特徴点を抽出し、第1地点から第2地点に移動中の動画像により、動画像トラッキングを行い第2地点の静止画像に前記特徴点を特定し、特徴点に基づき第1地点の静止画像と第2地点の静止画像とをステレオマッチングすると共に前記第1地点及び第2地点の地心座標系の位置に基づき3次元モデルを形成し、又前記撮像制御装置は、第1地点の複数の光スペクトル画像を合成して第1光スペクトル合成画像を作成し、又第2地点の複数の光スペクトル画像を合成して第2光スペクトル合成画像を作成し、第1光スペクトル合成画像、第2光スペクトル合成画像の少なくとも一方と、前記3次元モデルとを合成し、前記測定対象の3次元位置データと光スペクトル情報を有する4次元モデルを作成する画像取得装置に係るものである。
【0015】
又本発明は、前記第1カメラは前記静止飛行状態で同位置動画像を取得し、前記撮像制御装置は、前記同位置動画像のフレーム画像に同期させ、前記第2カメラで光スペクトル画像を取得し、フレーム画像間で画像トラッキングを行い、時間的に連続する2つの光スペクトル画像に対応する2つのフレーム画像の画像マッチングを行い、該画像マッチングで得られた条件で前記2つの光スペクトル画像を合成し、前記フレーム画像の画像マッチングと光スペクトル画像の合成とを順次繰返し、前記静止飛行状態で取得した全ての光スペクトル画像を合成する画像取得装置に係るものである。
【0016】
又本発明は、飛行体と、該飛行体に設けられたGPS装置と、前記飛行体の飛行を制御する制御装置と、該飛行体に搭載され、時系列に連続するフレーム画像で構成される動画像を取得する第1カメラと、前記第1カメラと既知の関係に設けられ、測定対象の光スペクトル画像を取得する第2カメラと、撮像制御装置とを具備し、前記飛行体は第1地点から第2地点に移動し、前記GPS装置は、第1地点、第2地点の地心座標系の位置を測定し、前記第1カメラは第1地点の静止画像を取得すると共に第1地点から第2地点に移動中に動画像を取得し、更に第2地点の静止画像を取得し、前記第2カメラは第1地点から第2地点の移動途中に所定波長領域の光スペクトル画像を複数取得し、前記撮像制御装置は、第1地点の静止画像から複数の特徴点を抽出し、第1地点から第2地点に移動中の動画像により、動画像トラッキングを行い第2地点の静止画像に前記特徴点を特定し、該特徴点に基づき第1地点の静止画像と第2地点の静止画像とをステレオマッチングすると共に前記第1地点及び第2地点の地心座標系の位置に基づき3次元モデルを形成し、又前記撮像制御装置は、複数の光スペクトル画像を合成して光スペクトル合成画像を作成し、前記3次元モデルと前記光スペクトル合成画像とを合成し、前記測定対象の3次元位置データと光スペクトル情報を有する4次元モデルを作成する画像取得装置に係るものである。
【0017】
又本発明は、前記撮像制御装置は、前記動画像のフレーム画像に同期させ、前記第2カメラで光スペクトル画像を取得し、フレーム画像間で画像トラッキングを行い、時間的に連続する2つの光スペクトル画像に対応する2つのフレーム画像の画像マッチングを行い、該画像マッチングで得られた条件で前記2つの光スペクトル画像を合成し、前記フレーム画像の画像マッチングと光スペクトル画像の合成とを順次繰返し、前記移動途中に取得した全ての光スペクトル画像を合成する画像取得装置に係るものである。
【発明の効果】
【0018】
本発明によれば、時系列に連続するフレーム画像で構成される動画像を取得する第1カメラと、該第1カメラと既知の関係にあり、測定対象の光スペクトル画像を複数取得する第2カメラと、撮像制御装置とを具備し、該撮像制御装置は、1つの前記フレーム画像から複数の特徴点を抽出し、該特徴点を時系列に連続するフレーム画像中に順次特定し、前記複数の光スペクトル画像と対応するフレーム画像について前記特徴点に基づきフレーム画像間の画像マッチングを行い、該画像マッチングで得られた条件に基づき前記複数の光スペクトル画像を合成する様構成したので、光スペクトル画像間でずれがあった場合も修正でき、精度の高い光スペクトル合成画像、ハイパースペクトル画像を取得することができる。
【0019】
又本発明によれば、前記フレーム画像と前記光スペクトル画像とが同期して取得され、各フレーム画像の特徴点のフレーム画像上の位置に基づいて各光スペクトル画像の相対的な位置合わせを行うので、光スペクトル画像間でずれがあった場合も修正でき、精度の高い光スペクトル画像の合成が可能となる。
【0020】
又本発明によれば、前記第1カメラの動画像の第1フレーム画像から少なくとも5点の特徴点が抽出され、該少なくとも5点の特徴点が画像トラッキングにより第nフレーム画像中に特定され、両画像の特徴点に基づきステレオマッチングが行われ、前記測定対象の3次元モデルを形成するので、第nフレーム画像での特徴点の特定が容易であり、ステレオマッチングが容易となる。
【0021】
又本発明によれば、前記3次元モデルに前記合成した光スペクトル画像の波長成分の情報を重合するので、3次元位置情報に加え光スペクトル情報を含む4次元の画像を取得することができる。
【0022】
又本発明によれば、飛行体と、該飛行体に設けられたGPS装置と、該飛行体の飛行を制御する制御装置と、該飛行体に搭載され、時系列に連続するフレーム画像で構成される動画像を取得する第1カメラと、該第1カメラと既知の関係に設けられ、測定対象の光スペクトル画像を取得する第2カメラと、撮像制御装置とを具備し、前記飛行体は第1地点で静止飛行を行い、静止飛行後第2地点に移動し、該第2地点で静止飛行を行い、前記GPS装置は、第1地点、第2地点の地心座標系の位置を測定し、前記第1カメラは第1地点の静止画像を取得すると共に第1地点から第2地点に移動中に動画像を取得し、更に第2地点の静止画像を取得し、前記第2カメラは第1地点の静止飛行中に所定波長領域の光スペクトル画像を複数取得すると共に第2地点の静止飛行中に所定波長領域の光スペクトル画像を複数取得し、前記撮像制御装置は、第1地点の静止画像から複数の特徴点を抽出し、第1地点から第2地点に移動中の動画像により、動画像トラッキングを行い第2地点の静止画像に前記特徴点を特定し、特徴点に基づき第1地点の静止画像と第2地点の静止画像とをステレオマッチングすると共に前記第1地点及び第2地点の地心座標系の位置に基づき3次元モデルを形成し、又前記撮像制御装置は、第1地点の複数の光スペクトル画像を合成して第1光スペクトル合成画像を作成し、又第2地点の複数の光スペクトル画像を合成して第2光スペクトル合成画像を作成し、第1光スペクトル合成画像、第2光スペクトル合成画像の少なくとも一方と、前記3次元モデルとを合成し、前記測定対象の3次元位置データと光スペクトル情報を有する4次元モデルを作成するので、上空からの4次元モデルが容易に取得可能となり、測定対象の任意の位置の3次元位置データと光スペクトル情報が簡単に得られる。
【0023】
又本発明によれば、前記第1カメラは前記静止飛行状態で同位置動画像を取得し、前記撮像制御装置は、前記同位置動画像のフレーム画像に同期させ、前記第2カメラで光スペクトル画像を取得し、フレーム画像間で画像トラッキングを行い、時間的に連続する2つの光スペクトル画像に対応する2つのフレーム画像の画像マッチングを行い、該画像マッチングで得られた条件で前記2つの光スペクトル画像を合成し、前記フレーム画像の画像マッチングと光スペクトル画像の合成とを順次繰返し、前記静止飛行状態で取得した全ての光スペクトル画像を合成するので、飛行体が完全に静止していない状態で取得した複数の光スペクトル画像間にずれがあった場合も、前記フレーム画像の画像マッチングを介して光スペクトル画像間の位置合せ或はマッチングを行うことができ、精度の高い光スペクトル合成画像を作成することができる。
【0024】
又本発明によれば、飛行体と、該飛行体に設けられたGPS装置と、前記飛行体の飛行を制御する制御装置と、該飛行体に搭載され、時系列に連続するフレーム画像で構成される動画像を取得する第1カメラと、前記第1カメラと既知の関係に設けられ、測定対象の光スペクトル画像を取得する第2カメラと、撮像制御装置とを具備し、前記飛行体は第1地点から第2地点に移動し、前記GPS装置は、第1地点、第2地点の地心座標系の位置を測定し、前記第1カメラは第1地点の静止画像を取得すると共に第1地点から第2地点に移動中に動画像を取得し、更に第2地点の静止画像を取得し、前記第2カメラは第1地点から第2地点の移動途中に所定波長領域の光スペクトル画像を複数取得し、前記撮像制御装置は、第1地点の静止画像から複数の特徴点を抽出し、第1地点から第2地点に移動中の動画像により、動画像トラッキングを行い第2地点の静止画像に前記特徴点を特定し、該特徴点に基づき第1地点の静止画像と第2地点の静止画像とをステレオマッチングすると共に前記第1地点及び第2地点の地心座標系の位置に基づき3次元モデルを形成し、又前記撮像制御装置は、複数の光スペクトル画像を合成して光スペクトル合成画像を作成し、前記3次元モデルと前記光スペクトル合成画像とを合成し、前記測定対象の3次元位置データと光スペクトル情報を有する4次元モデルを作成するので、上空からの4次元モデルが容易に取得可能となり、測定対象の任意の位置の3次元位置データと光スペクトル情報が簡単に得られる。
【0025】
又本発明によれば、前記撮像制御装置は、前記動画像のフレーム画像に同期させ、前記第2カメラで光スペクトル画像を取得し、フレーム画像間で画像トラッキングを行い、時間的に連続する2つの光スペクトル画像に対応する2つのフレーム画像の画像マッチングを行い、該画像マッチングで得られた条件で前記2つの光スペクトル画像を合成し、前記フレーム画像の画像マッチングと光スペクトル画像の合成とを順次繰返し、前記移動途中に取得した全ての光スペクトル画像を合成するので、飛行体が移動中に取得した複数の光スペクトル画像を、前記フレーム画像の画像マッチングを介して光スペクトル画像間の位置合せ或はマッチングを行うことができ、精度の高い光スペクトル合成画像を作成することができるという優れた効果を発揮する。
【図面の簡単な説明】
【0026】
【図1】本発明に係る撮像装置が搭載された小型飛行体を示す概略図である。
【図2】該撮像装置のカメラ部及び撮像制御装置の概略構成図である。
【図3】飛行体が2地点で撮影した画像から飛行体の高度、測定点の座標の測定を行う写真測量の原理を示す説明図である。
【図4】写真測量で、カメラが傾斜している場合の相互標定についての説明図である。
【図5】本発明の実施例に用いられる透過型の干渉フィルタを有するスペクトルカメラの光学系を示す説明図であり、(A)は絞り孔が光軸と一致した状態を示し、(B)は絞り孔が光軸と離反した状態を示している。
【図6】入射角と透過するピーク波長の関係を示すグラフである。
【図7】干渉フィルタへの入射角に対応する波長透過特性を示すグラフである。
【図8】本発明の実施例に用いられる他のスペクトルカメラで、反射型の干渉フィルタを有する光学系を示す説明図であり、(A)は絞り孔が光軸と一致した状態を示し、(B)は絞り孔が光軸と離反した状態を示している。
【図9】本発明の実施例に用いられる更に他のスペクトルカメラで、反射型の干渉フィルタを有する光学系を示す説明図であり、(A)は絞り孔が光軸と一致した状態を示し、(B)は絞り孔が光軸と離反した状態を示している。
【図10】特性の異なる複数の干渉膜を備えた干渉フィルタを示す正面図である。
【図11】本実施例に於いて、ハイパースペクトル画像を取得する状態を示す説明図である。
【図12】ホバリング状態で画像を複数枚取得した場合の画像間の状態を示す説明図である。
【図13】本発明の実施例の作用を示すフローチャートである。
【図14】図13中のSTEP:03及びSTEP:08の詳細を示すフローチャートである。
【図15】本発明の第2の実施例の作用を示すフローチャートである。
【発明を実施するための形態】
【0027】
以下、図面を参照しつつ本発明の実施例を説明する。
【0028】
本発明の実施例に係る画像取得装置は、小型無人飛行体、例えば遠隔操作可能な小型ヘリコプタ或は自律飛行可能な小型ヘリコプタに搭載される。
【0029】
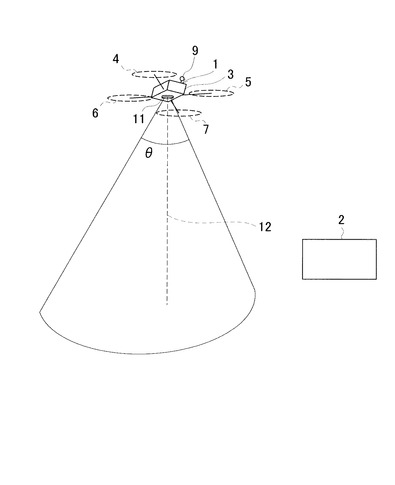
図1は、本実施例に係る画像取得装置を搭載した小型飛行体1を示している。
【0030】
図1中、2は地上に設置される基地制御装置であり、該基地制御装置2は、前記飛行体1とデータ通信可能であり、前記飛行体1の飛行の制御、飛行計画の設定、変更、前記飛行体1が収集した情報を保存、管理する。
【0031】
前記飛行体1は、例えば自律飛行する小型飛行体としてのヘリコプタである。該ヘリコプタ1は前記基地制御装置2から遠隔操作で操縦され、或は前記基地制御装置2から前記ヘリコプタ1の制御装置(図示せず)に飛行計画が設定され、該制御装置が航行手段(後述)を制御し、飛行計画に従って、自律飛行する。又、制御装置は、航行手段を制御し、ヘリコプタ1を所定の速度、所定の高度での飛行に制御すると共に、所定位置でホバリング(静止飛行状態)に制御することが可能である。
【0032】
前記ヘリコプタ1は、機体3、該機体3に設けられた所要数のプロペラ、例えば前後左右、計4組のプロペラ4,5,6,7を有し、該プロペラ4,5,6,7はそれぞれ個別にモータ(図示せず)に連結され、又該モータは独立して駆動が制御される様になっている。尚、前記プロペラ4,5,6,7及び前記モータ等は飛行体の航行手段を構成する。
【0033】
前記機体3には、前記ヘリコプタ1の基準位置を測定するGPS装置9が設けられている。
【0034】
前記ヘリコプタ1の機体3には、撮像装置11が搭載されている。前記撮像装置11は光軸12を有し、該光軸12は下方に延出し、前記撮像装置11は前記ヘリコプタ1の下方を撮像する様になっている。
【0035】
次に、図2により、前記撮像装置11の概略構成を説明する。
【0036】
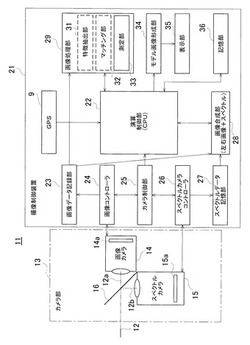
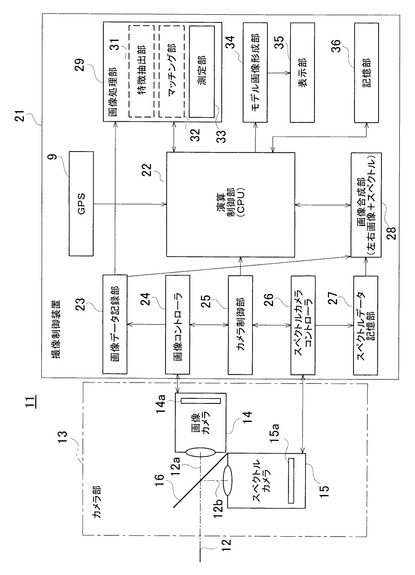
該撮像装置11は、カメラ部13及び撮像制御装置21を有し、該撮像制御装置21は前記カメラ部13が撮像した画像データ及び前記GPS装置9からの位置情報に基づき測定対象物の写真測量を行い、或は前記画像データと前記カメラ部13が取得した光スペクトルデータの合成等の処理を行う。
【0037】
先ず、前記カメラ部13について説明する。
【0038】
該カメラ部13は、第1カメラとして画像カメラ14及び第2カメラとしてスペクトルカメラ15を具備し、前記光軸12はハーフミラー16によって分割され、一方の光軸12a上に前記画像カメラ14が設けられ、他方の光軸12b上に前記スペクトルカメラ15が設けられている。前記画像カメラ14は、測定対象物のありのままの画像(リアル画像)を取得し、前記スペクトルカメラ15は光スペクトル画像を取得する。
【0039】
上記した様に、前記画像カメラ14と前記スペクトルカメラ15とは前記光軸12を共有しており、前記画像カメラ14と前記スペクトルカメラ15とは既知の関係となっている。又、前記画像カメラ14と前記スペクトルカメラ15とを分離して設けてもよい。この場合も前記画像カメラ14と前記スペクトルカメラ15の光軸は平行に設定され、光軸間の距離は既知とされ、前記画像カメラ14と前記スペクトルカメラ15は既知の関係に設定される。
【0040】
前記画像カメラ14は測定個所の画像を撮像し、デジタルの画像データを出力するものであり、静止画像を所定時間間隔で撮像するカメラであってもよいし、或は画像を連続的に撮像するビデオカメラであってもよい。
【0041】
又、前記画像カメラ14は、撮像素子14aとして、画素(ピクセル)の集合体であるCCD、或はCMOSセンサを有しており、前記撮像素子14aの中心(受光面の座標中心)を前記光軸12aが垂直に通過する様に該光軸12aと前記撮像素子14aとの関係が設定されている。従って、前記撮像素子14aの各画素は撮像素子14a上の位置(座標)が特定でき、更に各画素の画角(前記光軸12に対する角度)が分る様になっている。
【0042】
前記スペクトルカメラ15は、前記画像カメラ14と同様、撮像素子15aとして、画素(ピクセル)の集合体であるCCD、或はCMOSセンサを有しており、該撮像素子15aの中心(受光面の座標中心)を前記光軸12bが垂直に通過する様に該光軸12bと前記撮像素子15aとの関係が設定されている。従って、前記撮像素子15aの各画素は撮像素子15a上の位置(座標)が特定でき、該撮像素子15aの各画素の画角(前記光軸12に対する角度)が分る様になっている。更に、前記撮像素子15aの各画素と前記撮像素子14aの各画素とは、1:1に対応している。
【0043】
前記撮像制御装置21について説明する。
【0044】
該撮像制御装置21は、演算制御部(CPU)22、画像データ記録部23、画像コントローラ24、カメラ制御部25、スペクトルカメラコントローラ26、スペクトルデータ記憶部27、画像合成部28、画像処理部29、特徴抽出部31、マッチング部32、測定部33、モデル画像形成部34、表示部35、記憶部36を具備している。
【0045】
前記カメラ制御部25は、前記画像カメラ14、前記スペクトルカメラ15を同期制御するものであり、前記画像コントローラ24は前記カメラ制御部25からの指令信号に基づき前記画像カメラ14を駆動し、画像データ(リアル画像データ)を撮像し、取得した画像データは撮像時間に関連付けて前記画像データ記録部23に格納される。
【0046】
又、前記スペクトルカメラコントローラ26は前記カメラ制御部25からの指令に基づき前記スペクトルカメラ15を駆動し、光スペクトル画像データを取得し、取得した光スペクトル画像データは時間に関連付けられて前記スペクトルデータ記憶部27に格納される。
【0047】
前記画像合成部28は、前記画像データ記録部23に格納された画像データと前記スペクトルデータ記憶部27に格納された光スペクトル画像データとを合成し、1つの画像の全ピクセル(画素)に光スペクトル情報を有するハイパースペクトル画像を合成するものである。
【0048】
前記画像処理部29は前記特徴抽出部31、前記マッチング部32を具備し、1フレームの画像データから特徴点(パスポイント)を少なくとも5以上抽出し、時間的に異なる画像データ或は、異なる撮像位置から取得した画像データについて前記特徴点に基づき画像のトラッキング或はマッチングを行うものである。
【0049】
尚、画像トラッキング、画像マッチングについては、SSDA法(sequential similarity detection algorithm)、正規化相互相関法、最小2乗マッチング法等が用いられる。
【0050】
前記測定部33は、異なる撮像位置から前記画像カメラ14で取得した2つの画像データに基づき写真測量を実行するものである。
【0051】
前記モデル画像形成部34は、前記ハイパースペクトル画像に前記測定部33で測定した各画素の距離データを関連付け、2次元位置データ(平面座標データ)+光スペクトルデータ+高さデータの4次元のデータを有するモデル画像を形成する。
【0052】
前記記憶部36には、カメラ制御に必要なプログラム、画像データと光スペクトル画像データの合成に必要なプログラム、画像処理に必要なプログラム、測定に必要なプログラム、モデル画像を形成する為に必要なプログラム、前記表示部35を制御する為のプログラム等の各種プログラムが格納されている。尚、前記記憶部36の一部に前記画像データ記録部23、前記画像コントローラ24を形成してもよい。
【0053】
次に、図3及び図4により、写真測量による距離測定について説明する。
【0054】
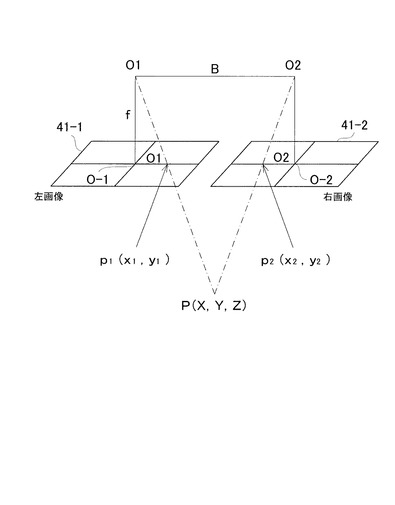
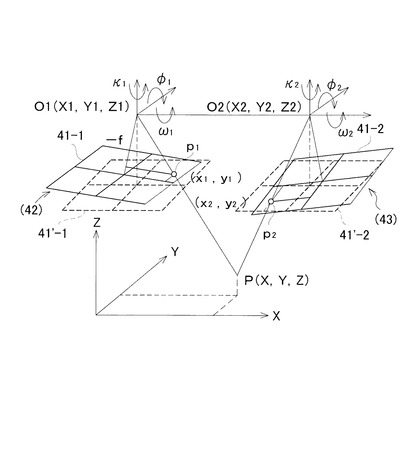
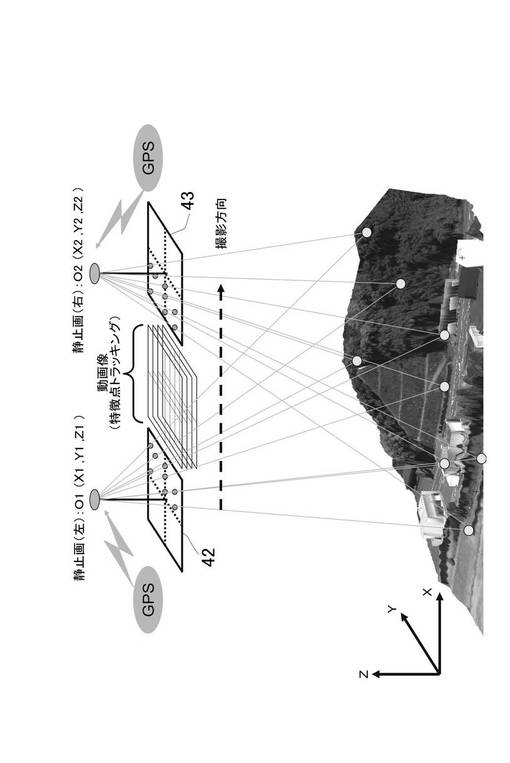
図3に於いて、前記ヘリコプタ1はO1 地点からO2 地点へ飛行し、O1 地点とO2 地点で撮像したとする。又、O1 地点からO2 地点迄の距離Bは撮影基線長であり、41-1,41-2は、それぞれO1 地点、O2 地点での前記撮像装置11の撮像素子41を示し、画像データと同等である。尚、図3では、前記撮像装置11の光軸12は鉛直、即ち前記ヘリコプタ1は水平姿勢の場合を示している。
【0055】
O1 地点で撮像した測定点Pの画像上(即ち撮像素子上)の位置は、p1 (x1 ,y1 )、O2 地点で撮像した測定点Pの画像上(即ち撮像素子上)の位置は、p2 (x2 ,y2 )となる。前記撮像装置11の焦点距離f、前記撮影基線長BからP迄の距離Z(前記ヘリコプタ1の高さ距離)は、3角形O1 ,O2 ,Pと3角形O1 ,p1 及び3角形O2 ,p2 との相似関係から、Z=−Bf/(x1 +x2 )となる。
【0056】
ここで、前記O1 地点、O2 地点の地上座標は前記GPS装置9によって測定でき、又前記撮影基線長Bは前記O1 地点とO2 地点の2点間の距離となり、前記GPS装置9の測定結果に基づき前記撮影基線長Bを求めることができる。又、測定点Pの地心位置(平面座標)も、同様にp1 (x1 ,y1 )及びp2 (x2 ,y2 )と前記GPS装置9で測定したO1 地点、O2 地点の地心位置から求めることができる。
【0057】
従って、前記ヘリコプタ1が移動する過程で順次撮像した2つの画像から、ヘリコプタ1の高度(地表からの高さ)をリアルタイムで測定(高さ距離測定)することができる。
【0058】
上記写真測量に於いて、p1 (x1 ,y1 )及びp2 (x2 ,y2 )は、O1 地点で撮像した左画像42と、O2 地点で撮像した右画像43との共通の点に対応するものであり、パスポイントと呼ばれる。
【0059】
前記左画像42中のp1 点は、前記O1 地点で取得した左画像42についてエッジ処理等の画像処理をすることで特徴点として求められる。尚、図4中では1つを示しているが、実際には多数の点が特徴点として抽出される。
【0060】
又、前記p1 点に対応する前記p2 点を右画像43中に特定する作業は、動画像トラッキングによって行う。尚、動画像は、時系列に連続するフレーム画像によって構成されている。
【0061】
動画像トラッキングは、O1 地点からO2 地点に至る間中、動画像(フレーム画像)を取得し続け、1つのフレーム画像中に、前記p1 点を含む所定範囲を検索範囲に設定する。時間的に隣接する次フレーム画像中の検索範囲中でp1 点と対応する点を検索し、更に特定する。次フレーム画像に対して所定範囲での検索と、特定を順次繰返し、最終的に右画像43中に前記p2 点を特定するものである。
【0062】
尚、動画像トラッキングについては特許文献2に記載されている。
【0063】
前記ヘリコプタ1は図示しない飛行制御部によって水平に制御されているが、風等の影響で、水平状態が崩れることがある。この為、O1 地点での前記撮像装置11の姿勢と、O2 地点での撮像装置11の姿勢とが異なる場合がある。図4は、O1 地点で撮像した際の撮像素子41-1の状態とO2 地点で撮像した際の撮像素子41-2の傾きの状態を示す模式図である。又、前記撮像素子41-1で得られる左画像42、前記撮像素子41-2で得られる右画像43も同様な状態となっている。
【0064】
画像の傾きは、光軸12の鉛直(Z軸)を基準とすると、Z軸を中心とする回転角κ、水平第1軸(X軸)を中心とした回転角ω、水平第2軸(Y軸)を中心とした回転角φによって表され、O1 地点で撮像した画像とO2 地点で撮像した画像とをκ,ω,φを変数として相互標定することで、図中破線で示す状態(図3の状態)に変換することができる。又、相互標定することで、測定点Pの3次元座標が演算でき、更にO1 地点、O2 地点でのヘリコプタ1の高度を測定できる。
【0065】
ここで、O1 地点、O2 地点での前記3軸の回転角は、図示しないジャイロユニットによって測定でき、O1 地点での画像中のp1 の座標(x1 ,y1 )、O2 地点での画像中のp2 の座標(x2 ,y2 )は、撮像素子41の画素の位置から測定できる。従って、相互標定後の変換座標系でのp1 の座標を(X1 ,Y1 ,Z1 )とし、相互標定後の変換座標系(モデル座標)でのp2 の座標を(X2 ,Y2 ,Z2 )、撮像装置11の焦点距離をfとすれば、
【0066】
変換座標系(モデル座標)でのp1 ,p2 の座標は以下に表される。
【0067】
X1 =x1 cosφ1 ・cosκ1 −y1 cosφ1 ・sinκ1 −fsinφ1
Y1 =x1 sinκ1 −y1 cosκ1
Z1 =−x1 sinφ1 ・cosκ1 −y1 sinφ1 ・sinκ1 −fcosφ1
X2 =x2 cosφ2 ・cosκ2 −y2 cosφ2 ・sinκ2 −fsinφ2 +1
Y2 =x2 (cosω2 sinκ2 +sinω2 ・sinφ2 cosκ2 )+
y2 (cosω2 cosκ2 −sinω2 ・sinφ2 ・sinκ2 )+
fsinω2 ・cosφ2
Z2 =x2 (sinω2 ・sinκ2 −cosω2 ・sinφ2 ・cosκ2 )+
y2 (sinω2 ・cosκ2 +cosω2 ・sinφ2 ・sinκ2 )−
fcosω2 ・cosφ2
【0068】
従って、得られたp1 の座標(X1 ,Y1 ,Z1 )、p2 の座標(X2 ,Y2 ,Z2 )に基づき図3で示したと同様にして測定点Pの3次元座標を演算(絶対標定)することができる。
【0069】
次に、本実施例で使用されるスペクトルカメラ15の1例について、図5を参照して説明する。
【0070】
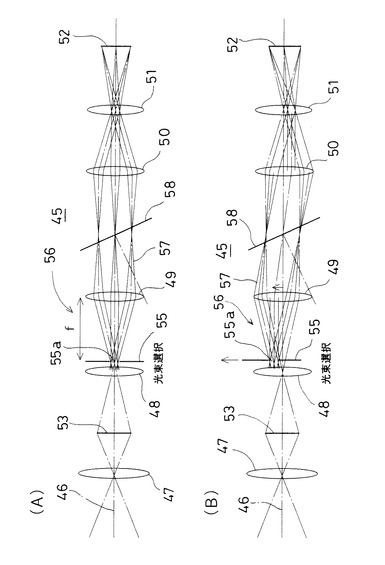
図5は該スペクトルカメラ15の光学系45を示している。
【0071】
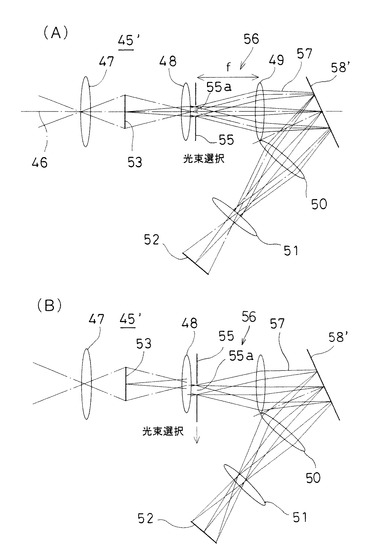
図5中、46は該光学系45の光軸を示し、該光軸46上に対物レンズ47、第1リレーレンズ48、第2リレーレンズ49、第3リレーレンズ50、結像レンズ51、撮像素子52が配設される。又、図5中、53は前記対物レンズ47によって結像された像を示し、又fは前記第2リレーレンズ49の焦点距離を示している。尚、前記対物レンズ47及び前記第1リレーレンズ48は第1光学系を模式的に示しており、又前記第2リレーレンズ49は第2光学系を模式的に示している。
【0072】
前記第1リレーレンズ48の前記第2リレーレンズ49側に光束選択部材である絞り55が配設される。該絞り55は、図中紙面に対して垂直な方向に延びるスリット状の絞り孔55aを有している。又、該絞り55は前記第2リレーレンズ49の物側焦点位置又は略物側焦点位置に配設され、該絞り55は前記光軸46に対して垂直な方向(前記絞り孔55aと直交する方向)に移動可能に支持され、前記絞り55はリニアモータ等の適宜な位置変位手段により位置が変更される様になっている。
【0073】
ここで、前記絞り55、前記第2リレーレンズ49はテレセントリック光学系56を構成する。前記第1リレーレンズ48を透過した光束は、前記テレセントリック光学系56によって平行な多数の光束(主光線57)に分割される。
【0074】
該主光線57の集光位置(前記第2リレーレンズ49による結像位置、或は略結像位置)に透過型の干渉膜が形成された干渉フィルタ58が配設される。該干渉フィルタ58は波長選択フィルタとして機能し、前記干渉フィルタ58を通過した特定波長の光線が前記第3リレーレンズ50及び前記結像レンズ51によって前記撮像素子52上に結像される。結像された像は、特定波長に形成され2次元の像となる。
【0075】
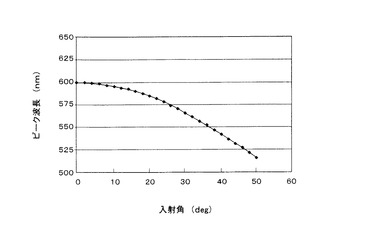
前記干渉フィルタ58は、該干渉フィルタ58に入射する光線の入射角によって波長選択特性が変化する性質を有する。図6は、入射角と透過するピーク波長の関係(ピーク波長の入射角依存性)を示しており、入射角を変化させることでピーク波長が変化していることが分る。
【0076】
又、図5(A)は、前記絞り55の前記絞り孔55aが前記光軸46上に位置しており、この場合前記主光線57は前記光軸46と平行となる。次に、図5(B)に示す様に前記絞り55を移動させた場合、例えば図示の様に、上方に移動させると、前記主光線57は前記光軸46に対して傾斜する。即ち、前記干渉フィルタ58に対する入射角が変化する。従って、前記絞り55を移動させることで前記干渉フィルタ58を透過する波長を変化させることが可能となる。
【0077】
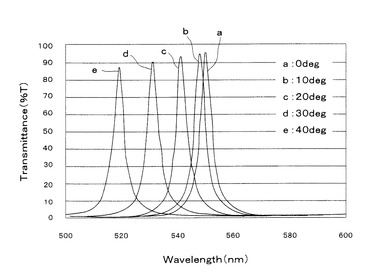
例えば、図6を参照すれば、前記干渉フィルタ58に対する入射角を0゜〜50゜に変化させると、透過する波長のピークは600nm〜520nmに変化する。即ち、前記干渉フィルタ58は、600nm〜520nmの波長選択範囲Wを有することになる。図7は、前記干渉フィルタ58への入射角に対応する波長透過特性を示している。
【0078】
次に、図5では、前記干渉フィルタ58を前記光軸46に対して傾斜させているが、図6に示される様に入射角依存性は入射角が10゜を超えた辺りからリニアとなる。従って、予め前記干渉フィルタ58を傾斜させておくことで、前記絞り55の変位に対する選択波長の変化が効果的に得られる。
【0079】
従って、前記絞り55を変位させる度に、前記撮像素子52より画像を取得することで、図6の波長透過特性を有する干渉フィルタ58を使用すれば、600nm〜520nmの波長範囲での光スペクトルを取得することができる。又、600nm〜520nmを超える波長範囲での光スペクトルを取得する場合は、異なる波長選択範囲W′を有する干渉フィルタに交換すればよい。
【0080】
図7は、前記干渉フィルタ58の角度を0°,10°,20°,30°,40°と変化させた場合に得られる光スペクトルの一例を示している。
【0081】
図8は、図5で示した光学系45の変更例を示している。
【0082】
図5で示した前記光学系45では、透過式の干渉フィルタ58を用いたが、図8で示される様に、反射式の干渉フィルタ58′を用いて光学系45′を構成することもできる。前記干渉フィルタ58′は反射鏡に反射型の干渉膜を形成したものである。前記光学系45′では前記干渉フィルタ58′が光を反射することで波長が選択される。
【0083】
尚、図8中、図5中で示したものと同等のものには同符号を付してあり、その説明を省略する。
【0084】
上記変更例でも、図8(B)に示される様に、前記絞り55を移動させることで、前記干渉フィルタ58′への主光線57の入射角が変化し、所定の波長選択範囲W内での特定波長が選択反射される。
【0085】
前記干渉フィルタとして反射型のフィルタ58′を用いることで、光学系45′をコンパクトにすることができる。
【0086】
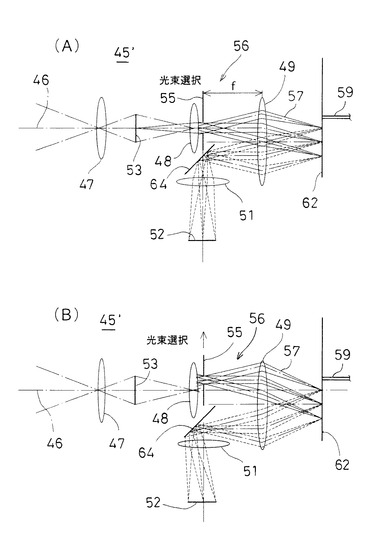
図9、図10は更に他の変更例を示している。
【0087】
図9、図10で示す変更例は、図8で示した光学系45′と同等の構成であり、反射式の干渉フィルタ62を用いている。
【0088】
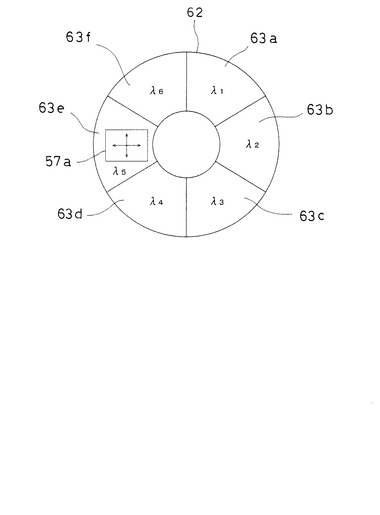
該干渉フィルタ62は、図10で示す様に形状が円板であり、回転軸59を介して回転可能に支持されている。該干渉フィルタ62は反射面が円周方向に所要角度に等分(図示では6等分)されている。反射面が分割されることで所要数(図示では6)の分割反射面63a〜63fが形成され、各分割反射面63a〜63f毎に波長選択特性の異なる反射干渉膜が形成されている。
【0089】
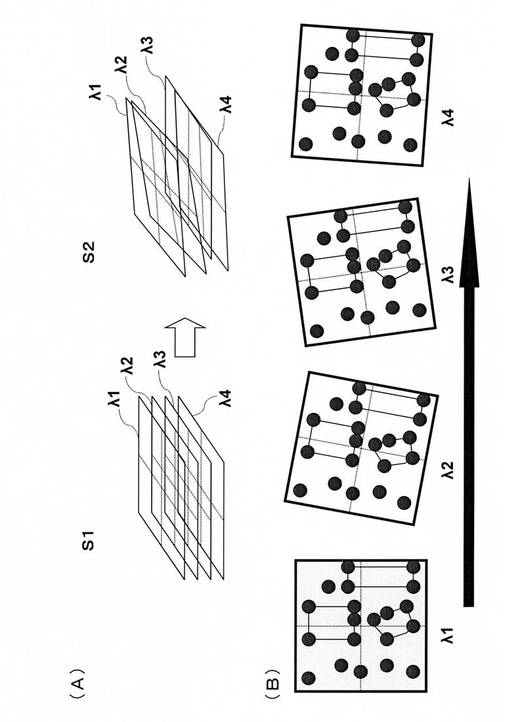
例えば、分割反射面63aには選択波長λ1が400nm〜450nm、分割反射面63bには選択波長λ2が450nm〜525nm、分割反射面63cには選択波長λ3が525nm〜650nm、分割反射面63dには選択波長λ4が650nm〜750nm、分割反射面63eには選択波長λ5が750nm〜870nm、分割反射面63fには選択波長λ6が870nm〜950nmの反射干渉膜がそれぞれ形成される。
【0090】
光軸46上に対物レンズ47、第1リレーレンズ48、絞り55が配置され、前記光軸46と平行で所定量離反した光軸上に第2リレーレンズ49が配設され、該第2リレーレンズ49に対向して前記干渉フィルタ62が設けられている。該干渉フィルタ62で反射された光束は、反射鏡64によって偏向され、偏向された光束は結像レンズ51を経て撮像素子52に結像される。図10中、57aが前記主光線57の結像を示す。
【0091】
該他の変更例では、第1リレーレンズ48、絞り55が前記第2リレーレンズ49の光軸46とはずれた位置にあるので、テレセントリック光学系56によって分割された主光線57は前記干渉フィルタ62に傾斜して入射する。更に、図9(B)に示される様に、前記絞り55を前記光軸46より離反する様に移動させれば、前記主光線57の入射角は更に大きくなる。従って、前記絞り55を移動させることで選択波長を変更することができる。
【0092】
更に、得たい光スペクトルが、400nm〜950nmに及ぶ時は、前記分割反射面63aから前記分割反射面63f迄、順次分割反射面を切替え、切替えられた分割反射面63毎に前記絞り55を移動させ、該絞り55の移動位置毎の波長で画像を取得する。又、前記分割反射面63a〜63fの切替えと、前記絞り55の移動は同期して行われ、前記分割反射面63の切替えが行われる毎に、スリット孔が前記光軸46の位置から最も離反する位置(基準位置)に復帰し、更に所定量毎に前記絞り55が移動される。
【0093】
而して、前記干渉フィルタ62の回転と前記絞り55の移動の協動により、400nm〜950nm迄の範囲で波長が選択され、選択した波長毎に前記撮像素子52で画像が取得され、400nm〜950nmの全域での光スペクトルを取得することができる。
【0094】
尚、得たい光スペクトルの波長範囲が限られている場合は、該当する波長選択特性を有する分割反射面を選択して光スペクトルを取得すればよい。
【0095】
尚、上記干渉フィルタ62は円板とし、回転可能としたが、長矩形形状とし、干渉フィルタ62を長手方向に分割して、分割反射面を形成し、前記干渉フィルタ62を長手方向にスライドさせ、分割反射面の切替えを行ってもよい。
【0096】
又、上記図5に示した実施例に於いて、透過型の干渉フィルタ58の円板を所定等分し、分割部分に異なる波長特性を有する干渉膜を形成し、図9、図10で示す変更例と同様に、前記干渉フィルタ58を回転させて、それぞれの分割部分で光スペクトル画像を取得する様にしてもよい。
【0097】
以下、本実施例に於ける作動を図11を参照して説明する。尚、以下の説明は、スペクトルカメラ15として、図5で示した光学系45、或は図8、図9で示した光学系45′で、更に干渉フィルタが分割され、而も分割された部位が異なる透過特性を有する場合を説明する。
【0098】
上記した様に、本実施例では、リアル画像と光スペクトル画像を取得する。
【0099】
前記画像カメラ14によりO1 地点で静止画像(左画像42)を取得し、又前記GPS装置9でO1 地点の位置の測定が行われる。取得された静止画像は前記画像データ記録部23に格納され、更にO1 地点での静止画像から前記画像処理部29により特徴点が少なくとも5以上(好ましくは多数)抽出される。O1 地点からO2 地点に移動する際には前記特徴点について動画像によるトラッキングを行う。更に、前記画像カメラ14によりO2 地点で静止画像(右画像43)を取得する。前記GPS装置9により、O2 地点の位置測定が行われる。前記画像処理部29により、O2 地点での静止画像中に前記特徴点を少なくとも5つ特定し、該特徴点に基づきO1 地点での静止画像とO2 地点での静止画像についてマッチングを行う。更に前記測定部33により、O1 地点で取得した静止画像と、O2 地点で取得した静止画像により、写真測量を行う。
【0100】
又O1 地点、O2 地点で静止画像を取得すると同時に、前記スペクトルカメラ15により光スペクトル画像を取得する。
【0101】
光スペクトル画像を取得する為には、前記ヘリコプタ1を静止させ(ホバリング)、前記絞り55の位置を順次変更し、前記干渉フィルタ58が選択する波長を変更し、選択された波長毎に画像を取得する。光スペクトル画像の取得は、予め設定した波長の範囲で実行される。
【0102】
設定された波長の範囲(λ1〜λn)が、1つの干渉膜で前記主光線57の入射角を変更して得られる波長の範囲を超える場合は、前記干渉フィルタ58を回転させ、前記主光線57が入射する部位の波長特性を変更し、更に前記絞り55の移動で得られる波長範囲の光スペクトルを取得する。
【0103】
上記の如くして取得された光スペクトル画像は、前記スペクトルデータ記憶部27に格納される。
【0104】
O1 地点及びO2 地点について格納された光スペクトル画像をそれぞれ合成することで、O1 地点及びO2 地点での所定波長範囲(λ1〜λn)の光スペクトル画像を含む光スペクトル合成画像が合成される。更に、合成されたO1 地点の光スペクトル合成画像とO1 地点の前記静止画像とを合成することでO1 地点で取得したハイパースペクトル画像が合成され、更に合成されたO2 地点の光スペクトル合成画像とO2 地点の前記静止画像とを合成することでO2 地点で取得したハイパースペクトル画像が合成される。
【0105】
更に、前記特徴点に基づきO1 地点での静止画像とO2 地点での静止画像について画像マッチング(ステレオマッチング)を行い、更に写真測量の結果を静止画像に関連付けることで、3次元位置データを有する画像(3Dモデル画像)を作成でき、更に前記O1 地点の光スペクトル合成画像、O2 地点の光スペクトル合成画像の少なくとも一方を前記3Dモデル画像に関連付ける。
【0106】
上記した様に、静止画像と光スペクトル画像は1:1で対応しているので、静止画像中に一点を指定すれば、光スペクトル合成画像から直ちに指定した点の光スペクトルが得られ、更に3Dモデル画像から3次元位置データを得ることができる。
【0107】
而して、O1 地点及びO2 地点でのハイパースペクトル画像が取得できると共に、光スペクトル情報を有する3Dモデル画像、即ち4Dモデル画像を取得することができる。
【0108】
従って、作物の発育状態を光スペクトルから、或は作物の3次元データから大きさを認識することが可能である。或は、地表の状態を露出した物質の種類の情報も合わせて取得することができる。
【0109】
次に、前記ヘリコプタ1をホバリングさせ、光スペクトル画像を取得している状態では、常に姿勢が変動しており、完全に静止しているとは言えない。従って、各波長毎に取得した画像には、多少のズレがある。この為、前記スペクトルデータ記憶部27に格納された光スペクトル画像をそのまま合成すると、誤差が生じ、或はぼやける等の問題が生じる。
【0110】
図12は、ホバリング状態で、選択した波長がλ1,λ2,λ3,λ4の光スペクトル画像を取得している状態を示しており、図12(A)のS1は、ホバリング状態で撮像装置11が完全に静止している状態、S2は撮像装置11が変動している状態を示している。又図12(B)は、前記撮像装置11が変動している状態で取得したλ1,λ2,λ3,λ4の光スペクトル画像を、時間的な経過に合わせて展開した図である。尚、図中、黒丸は抽出した特徴点である。図12(A)、図12(B)から分る様に、画像をそのまま合成すると、各画像間で特徴点は合致せず、誤差が生じ、或はぼやけることが分る。
【0111】
従って、ホバリング状態で各波長毎に取得した光スペクトル画像を合成できる様にマッチング(相対的な位置合せ)する必要がある。
【0112】
前記スペクトルカメラ15により、光スペクトル画像を撮像中も、前記スペクトルカメラ15と同期させて前記画像カメラ14によりリアル画像が所定時間間隔で(或は連続画像で)取得され、画像トラッキングが行われる。
【0113】
各フレーム画像毎に特徴点が抽出され、時間的に隣接するフレーム画像について特徴点についての画像トラッキングが順次行われ、時間的に先行するフレーム画像(以下第1フレーム画像)で得られた特徴点が後のフレーム画像(以下第2フレーム画像)中に特定される。
【0114】
特徴点に基づき前フレーム画像と次フレーム画像を位置合せし、その位置合せで得られた条件に基づき前フレーム画像に対応する前記光スペクトル画像と次フレーム画像に対応する次光スペクトル画像との位置合せ(マッチング)を行うことができる。
【0115】
又、光スペクトル画像が所定フレーム画像枚数毎に取得される場合は、フレーム画像に関しては連続して画像トラッキングが実行される。
【0116】
画像トラッキングにより、時間的に先行する光スペクトル画像(以下第1光スペクトル画像)に対応する第1フレーム画像に対して特徴点が特定され、更に時間的に隣接する光スペクトル画像(第2光スペクトル画像)に対応する第2フレーム画像に対しても特徴点が特定される。
【0117】
第1フレーム画像と第2フレーム画像間で時間の経過があり、両フレーム画像間で光軸の傾き等が生じた場合は、両フレーム画像間で特徴点に基づき座標変換が実行され、画像マッチングが行われる。
【0118】
上記した様に、前記画像カメラ14で取得したリアル画像と、該リアル画像と同期して取得した光スペクトル画像とは、1:1で対応しているので、第1フレーム画像と第2フレーム画像との座標変換で得られた条件は、そのまま第1光スペクトル画像と第2光スペクトル画像のマッチングに適用することができる。
【0119】
而して、リアル画像のマッチングと並行して光スペクトル画像のマッチング(合成)を行うことで、誤差のない光スペクトル画像の合成を行うことができる。
【0120】
この光スペクトル画像の合成を、ホバリング状態で取得する光スペクトル画像全てについて順次実行することで、静止状態と同様な光スペクトル合成画像を取得することができる。
【0121】
上記した写真測量、光スペクトル画像、ハイパースペクトル画像の取得合成等について、図13、図14を参照して更に説明する。
【0122】
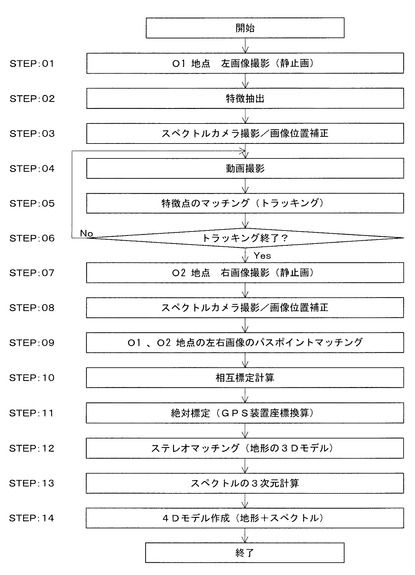
STEP:01 前記ヘリコプタ1をO1 地点でホバリングを開始し、該O1 地点で前記画像カメラ14により左画像42を取得する。又、前記GPS装置9によるヘリコプタ1の位置(即ちO1 地点)の測定が行われる。
【0123】
STEP:02 取得した左画像42をエッジ処理する等して特徴点を抽出する。
【0124】
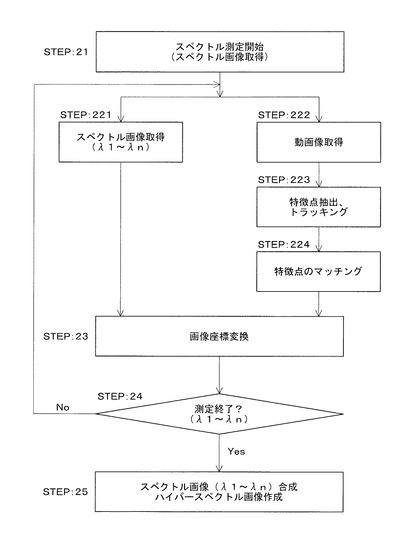
STEP:03 前記画像カメラ14で動画像を取得しつつ、該画像カメラ14と同期させて前記スペクトルカメラ15により光スペクトル画像を取得する。又、光スペクトル画像を取得することと並行して動画像による同位置での画像トラッキング(以下、同位置トラッキング)が実行され、動画像トラッキングの結果に基づき各光スペクトル画像間での画像位置補正が実行される。
【0125】
O1 地点での光スペクトル画像の取得、画像位置補正について、STEP:21〜STEP:25により説明する。
【0126】
STEP:21、STEP:221 所定波長領域(λ1〜λn)の光スペクトル画像が、各波長毎に所定の時間間隔で取得される。取得された光スペクトル画像は時系列に前記スペクトルデータ記憶部27に格納される。又、光スペクトル画像の取得と並行して動画像(前記画像カメラ14により取得されるリアル画像)が取得される(STEP:222)。光スペクトル画像が取得される時間間隔も前記動画像は取得され続けており、動画像を構成するフレーム画像間で画像トラッキングが実行される。
【0127】
STEP:223、STEP:224 画像トラッキング(同位置トラッキング)は、光スペクトル画像(λ1)の取得と時間的に同期しているフレーム画像(第1フレーム画像)から特徴点を抽出し、時間的に隣接する次フレーム画像に特徴点を画像トラッキングにより特定する。画像トラッキングは継続して実行され、時間的に隣接する次の光スペクトル画像(λ2)と同期したフレーム画像(第2フレーム画像)に特徴点を特定する。
【0128】
STEP:23 得られた第1フレーム画像の特徴点と第2フレーム画像の特徴点とに基づき第1フレーム画像と第2フレーム画像間のマッチング、第1フレーム画像と第2フレーム画像との間の座標変換が実行される。
【0129】
前記画像カメラ14と前記スペクトルカメラ15とは同軸で画像を取得しており、フレーム画像の各画素と前記光スペクトル画像の各画素とは1:1で対応しており、前記フレーム画像をマッチングした条件、座標変換の条件は時間的に隣接する前記光スペクトル画像にも適用することができる。
【0130】
STEP:24 全ての波長の光スペクトル画像が取得されているかどうかが判断され、取得されていない場合は、STEP:221、STEP:222に戻り引続き光スペクトル画像の取得、同位置トラッキングが行われる。
【0131】
STEP:25 所定波長領域(λ1〜λn)の全ての波長についての光スペクトル画像が取得されると、全ての光スペクトル画像を動画像トラッキングで得た条件で合成することでO1 地点での所定波長領域(λ1〜λn)の光スペクトルを有する光スペクトル合成画像を取得することができる。更に、光スペクトル合成画像と前記静止画像とを合成することでハイパースペクトル画像を取得することができる。
【0132】
STEP:04〜STEP:06 O1 地点での前記静止画像とハイパースペクトル画像が取得されると、前記ヘリコプタ1がO2 地点に移動する。移動中、前記画像カメラ14により動画像が取得され、画像トラッキング(移動トラッキング)が実行される。移動トラッキングは前記左画像42で抽出した特徴点に基づき実行しても、或はホバリング状態で同位置トラッキングで最終的に得られる特徴点を用いて移動中の画像トラッキングを行ってもよい。
【0133】
STEP:07 前記ヘリコプタ1がO2 地点に到達すると、移動トラッキングが終了される。ホバリングが開始され、右画像43が取得される。
【0134】
STEP:08 ホバリング状態で、前記画像カメラ14で動画像を取得しつつ、該画像カメラ14と同期させて前記スペクトルカメラ15により光スペクトル画像を取得する。又、光スペクトル画像を取得することと並行して動画像による同位置での画像トラッキング(以下、同位置トラッキング)が実行され、動画像トラッキングの結果に基づき各光スペクトル画像間での画像位置補正が実行される。
【0135】
前記STEP:21〜STEP:25が実行され、O2 地点で所定波長領域(λ1〜λn)の全ての波長についての光スペクトル画像が取得され、得られた全ての光スペクトル画像を合成してO2 地点での所定波長領域(λ1〜λn)の光スペクトルを有する光スペクトル合成画像が取得され、更に、光スペクトル合成画像と前記右画像43とを合成することでハイパースペクトル画像が取得される。
【0136】
STEP:09、STEP:10、STEP:11 前記右画像43中に特定された特徴点と、前記左画像42中に特定された特徴点とに基づき、マッチングが行われ、又左画像42又は右画像43のいずれかを基準とする座標変換(相互標定)が行われ、更にGPS装置9の地心座標への座標変換(絶対標定)が行われる。
【0137】
STEP:12、STEP:13 絶対標定の結果を基に左画像42と右画像43とのステレオマッチングが行われ、3次元位置データを有する地形の3Dモデルが得られる。
【0138】
STEP:14 上記した様に、光スペクトル画像と静止画像とは1:1に対応しているので、光スペクトルが得られる位置での3次元位置データが得られ、光スペクトル画像と前記3Dモデルとを合成することで、地形の3次元位置データと光スペクトル情報を有する4次元モデルが作成できる。
【0139】
次に、図15を参照して第2の実施例を説明する。
【0140】
尚、第2の実施例に於いて、図1に示されたヘリコプタ1に図2に示された撮像装置11が搭載された構成は、第1の実施例と同様とし、説明の詳細を省略する。
【0141】
第2の実施例ではO1 地点、O2 地点でホバリングすることなく、画像カメラ14によりO1 地点、O2 地点でそれぞれ左画像42、右画像43の静止画像を取得し、更にO1 地点からO2 地点に連続して移動する過程で、スペクトルカメラ15による光スペクトル画像を取得する。尚、前記ヘリコプタ1の飛行速度は、時間的に前後する光スペクトル画像間で大きなずれが発生しない程度とする。
【0142】
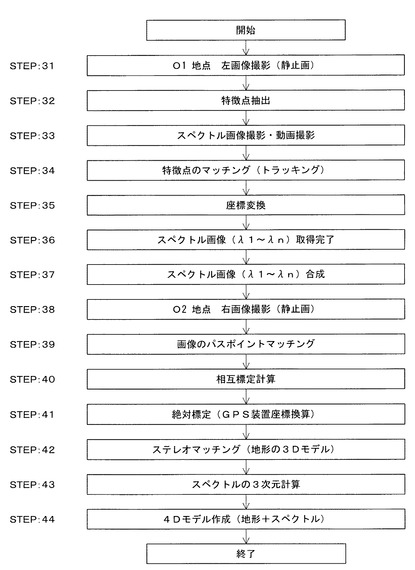
STEP:31〜STEP:38 O1 地点で左画像42を取得する。該左画像42をエッジ処理する等して特徴点を少なくとも5以上抽出する。更に、前記画像カメラ14により連続して動画像が取得され、動画像を構成するフレーム画像中に前記特徴点が特定される。更に、動画像の取得に同期して、各フレーム画像に同期し、或は複数間隔で取得したフレーム画像に同期し、前記スペクトルカメラ15による光スペクトル画像が取得される。
【0143】
時間的に隣接するフレーム画像間で特徴点に基づき画像マッチングが実行され、該画像マッチングの結果に基づき前記フレーム画像に対応する光スペクトル画像のマッチングが行われる。
【0144】
而して、順次取得される光スペクトル画像が、該光スペクトル画像と並行して取得される動画像のマッチング結果に基づき順次マッチングが実行される。O1 地点からO2 地点に到達する迄に波長λ1〜λn迄の予定した波長領域について光スペクトル画像を取得する。尚、光スペクトル画像の合成については、第1の実施例STEP:21〜STEP:25と同様に実行する。
【0145】
O2 地点に到達すると、前記画像カメラ14により右画像43を取得し、該右画像43中に前記左画像42で抽出した特徴点を特定する。尚、前記右画像43中に特徴点を特定する方法は、移動中に画像トラッキングでフレーム画像間で順次トラッキングしていた結果を反映する様にさせればよい。
【0146】
STEP:39、STEP:40、STEP:41 前記右画像43中に特定された特徴点と、前記左画像42中に特定された特徴点とに基づき、マッチングが行われ、又左画像42又は右画像43のいずれかを基準とする相互標定が行われ、更にGPS装置9の地心座標への絶対標定が行われる。
【0147】
STEP:42、STEP:43 絶対標定の結果を基に左画像42と右画像43とのステレオマッチングが行われ、3次元位置データを有する地形の3Dモデルが得られる。
【0148】
STEP:44 更に、光スペクトル画像と前記3Dモデルとを合成することで、地形の3次元位置データと光スペクトル情報を有する4次元モデルが作成できる。
【0149】
上記した様に、第2の実施例では、ホバリング工程を省略すると共にホバリング工程で取得していた光スペクトル画像を前記ヘリコプタ1の移動中に取得する様にしたものである。
【0150】
上記した実施例では、スペクトルカメラ15として干渉フィルタにより選択した特定波長毎に2次元画像を取得し、波長の選択範囲を所望の波長領域とすることで所望の波長領域の光スペクトル画像を取得したが、他のスペクトルカメラを採用することも可能である。他のスペクトルカメラとしてカメラ視野を横断するラインの画像を取得し、取得したラインの画像を回折格子で光スペクトルに分解して画像を取得し、前記ラインをカメラ視野全体に走査することで、光スペクトル画像を取得するものとしてもよい。
【符号の説明】
【0151】
1 ヘリコプタ
2 基地制御装置
3 機体
9 GPS装置
11 撮像装置
12 光軸
13 カメラ部
14 画像カメラ
15 スペクトルカメラ
16 ハーフミラー
21 撮像制御装置
22 演算制御部
28 画像合成部
29 画像処理部
33 測定部
34 モデル画像形成部
35 表示部
36 記憶部
45 光学系
47 対物レンズ
48 第1リレーレンズ
49 第2リレーレンズ
50 第3リレーレンズ
51 結像レンズ
52 撮像素子
55 絞り
56 テレセントリック光学系
57 主光線
58 干渉フィルタ
62 干渉フィルタ
63 分割反射面
64 反射鏡
【技術分野】
【0001】
本発明は、測定対象物の画像及び3次元データを取得すると共に3次元データに対応する光スペクトル特性を取得する画像取得装置に関するものである。
【背景技術】
【0002】
測定対象物を写真測量する等して、測定対象物の3次元データを取得するのと同時に測定対象物の画像を取得し、画像付の3次元データを取得することが行われている。
【0003】
従来の3次元測定装置で得られる画像付の3次元データは、地図データ等に用いられており、使用者の視認性を高める等の効果が得られている。
【0004】
一方、得られるデータは測定対象物の3次元位置データであり、得られる情報としては測定対象物の3次元位置である。
【0005】
測定対象物について測定を行う場合、より多くの情報が得られることが望まれ、測定対象物の位置情報のみならず、測定対象物の性状についての情報が得られることが望ましい。
【0006】
例えば、農作物の発育状態についての情報が得られれば、農作業について適切な判断、適切な処置が可能となり、或は地表に露出した鉱物の種類等が判断できれば、適切な土木工法の選択が可能となる等である。
【先行技術文献】
【特許文献】
【0007】
【特許文献1】特開2011−89895号公報
【特許文献2】特開2006−10376号公報
【発明の概要】
【発明が解決しようとする課題】
【0008】
本発明は斯かる実情に鑑み、変動状態のスペクトルカメラにより精度の高い光スペクトル画像を取得可能な、或は光スペクトル特性付の3次元データを取得可能な画像取得装置を提供するものである。
【課題を解決するための手段】
【0009】
本発明は、時系列に連続するフレーム画像で構成される動画像を取得する第1カメラと、該第1カメラと既知の関係にあり、測定対象の光スペクトル画像を複数取得する第2カメラと、撮像制御装置とを具備し、該撮像制御装置は、1つの前記フレーム画像から複数の特徴点を抽出し、該特徴点を時系列に連続するフレーム画像中に順次特定し、前記複数の光スペクトル画像と対応するフレーム画像について前記特徴点に基づきフレーム画像間の画像マッチングを行い、該画像マッチングで得られた条件に基づき前記複数の光スペクトル画像を合成する様構成した画像取得装置に係るものである。
【0010】
又本発明は、前記フレーム画像と前記光スペクトル画像とが同期して取得され、各フレーム画像の特徴点のフレーム画像上の位置に基づいて各光スペクトル画像の相対的な位置合わせを行う画像取得装置に係るものである。
【0011】
又本発明は、前記第1カメラの動画像の第1フレーム画像から少なくとも5点の特徴点が抽出され、該少なくとも5点の特徴点が画像トラッキングにより第nフレーム画像中に特定され、両画像の特徴点に基づきステレオマッチングが行われ、前記測定対象の3次元モデルを形成する画像取得装置に係るものである。
【0012】
又本発明は、前記3次元モデルに前記合成した光スペクトル画像の波長成分の情報を重合する画像取得装置に係るものである。
【0013】
又本発明は、前記第2カメラが取得する光スペクトル画像は、所定の波長領域に関する2次元画像として取得される画像取得装置に係るものである。
【0014】
又本発明は、飛行体と、該飛行体に設けられたGPS装置と、該飛行体の飛行を制御する制御装置と、該飛行体に搭載され、時系列に連続するフレーム画像で構成される動画像を取得する第1カメラと、該第1カメラと既知の関係に設けられ、測定対象の光スペクトル画像を取得する第2カメラと、撮像制御装置とを具備し、前記飛行体は第1地点で静止飛行を行い、静止飛行後第2地点に移動し、該第2地点で静止飛行を行い、前記GPS装置は、第1地点、第2地点の地心座標系の位置を測定し、前記第1カメラは第1地点の静止画像を取得すると共に第1地点から第2地点に移動中に動画像を取得し、更に第2地点の静止画像を取得し、前記第2カメラは第1地点の静止飛行中に所定波長領域の光スペクトル画像を複数取得すると共に第2地点の静止飛行中に所定波長領域の光スペクトル画像を複数取得し、前記撮像制御装置は、第1地点の静止画像から複数の特徴点を抽出し、第1地点から第2地点に移動中の動画像により、動画像トラッキングを行い第2地点の静止画像に前記特徴点を特定し、特徴点に基づき第1地点の静止画像と第2地点の静止画像とをステレオマッチングすると共に前記第1地点及び第2地点の地心座標系の位置に基づき3次元モデルを形成し、又前記撮像制御装置は、第1地点の複数の光スペクトル画像を合成して第1光スペクトル合成画像を作成し、又第2地点の複数の光スペクトル画像を合成して第2光スペクトル合成画像を作成し、第1光スペクトル合成画像、第2光スペクトル合成画像の少なくとも一方と、前記3次元モデルとを合成し、前記測定対象の3次元位置データと光スペクトル情報を有する4次元モデルを作成する画像取得装置に係るものである。
【0015】
又本発明は、前記第1カメラは前記静止飛行状態で同位置動画像を取得し、前記撮像制御装置は、前記同位置動画像のフレーム画像に同期させ、前記第2カメラで光スペクトル画像を取得し、フレーム画像間で画像トラッキングを行い、時間的に連続する2つの光スペクトル画像に対応する2つのフレーム画像の画像マッチングを行い、該画像マッチングで得られた条件で前記2つの光スペクトル画像を合成し、前記フレーム画像の画像マッチングと光スペクトル画像の合成とを順次繰返し、前記静止飛行状態で取得した全ての光スペクトル画像を合成する画像取得装置に係るものである。
【0016】
又本発明は、飛行体と、該飛行体に設けられたGPS装置と、前記飛行体の飛行を制御する制御装置と、該飛行体に搭載され、時系列に連続するフレーム画像で構成される動画像を取得する第1カメラと、前記第1カメラと既知の関係に設けられ、測定対象の光スペクトル画像を取得する第2カメラと、撮像制御装置とを具備し、前記飛行体は第1地点から第2地点に移動し、前記GPS装置は、第1地点、第2地点の地心座標系の位置を測定し、前記第1カメラは第1地点の静止画像を取得すると共に第1地点から第2地点に移動中に動画像を取得し、更に第2地点の静止画像を取得し、前記第2カメラは第1地点から第2地点の移動途中に所定波長領域の光スペクトル画像を複数取得し、前記撮像制御装置は、第1地点の静止画像から複数の特徴点を抽出し、第1地点から第2地点に移動中の動画像により、動画像トラッキングを行い第2地点の静止画像に前記特徴点を特定し、該特徴点に基づき第1地点の静止画像と第2地点の静止画像とをステレオマッチングすると共に前記第1地点及び第2地点の地心座標系の位置に基づき3次元モデルを形成し、又前記撮像制御装置は、複数の光スペクトル画像を合成して光スペクトル合成画像を作成し、前記3次元モデルと前記光スペクトル合成画像とを合成し、前記測定対象の3次元位置データと光スペクトル情報を有する4次元モデルを作成する画像取得装置に係るものである。
【0017】
又本発明は、前記撮像制御装置は、前記動画像のフレーム画像に同期させ、前記第2カメラで光スペクトル画像を取得し、フレーム画像間で画像トラッキングを行い、時間的に連続する2つの光スペクトル画像に対応する2つのフレーム画像の画像マッチングを行い、該画像マッチングで得られた条件で前記2つの光スペクトル画像を合成し、前記フレーム画像の画像マッチングと光スペクトル画像の合成とを順次繰返し、前記移動途中に取得した全ての光スペクトル画像を合成する画像取得装置に係るものである。
【発明の効果】
【0018】
本発明によれば、時系列に連続するフレーム画像で構成される動画像を取得する第1カメラと、該第1カメラと既知の関係にあり、測定対象の光スペクトル画像を複数取得する第2カメラと、撮像制御装置とを具備し、該撮像制御装置は、1つの前記フレーム画像から複数の特徴点を抽出し、該特徴点を時系列に連続するフレーム画像中に順次特定し、前記複数の光スペクトル画像と対応するフレーム画像について前記特徴点に基づきフレーム画像間の画像マッチングを行い、該画像マッチングで得られた条件に基づき前記複数の光スペクトル画像を合成する様構成したので、光スペクトル画像間でずれがあった場合も修正でき、精度の高い光スペクトル合成画像、ハイパースペクトル画像を取得することができる。
【0019】
又本発明によれば、前記フレーム画像と前記光スペクトル画像とが同期して取得され、各フレーム画像の特徴点のフレーム画像上の位置に基づいて各光スペクトル画像の相対的な位置合わせを行うので、光スペクトル画像間でずれがあった場合も修正でき、精度の高い光スペクトル画像の合成が可能となる。
【0020】
又本発明によれば、前記第1カメラの動画像の第1フレーム画像から少なくとも5点の特徴点が抽出され、該少なくとも5点の特徴点が画像トラッキングにより第nフレーム画像中に特定され、両画像の特徴点に基づきステレオマッチングが行われ、前記測定対象の3次元モデルを形成するので、第nフレーム画像での特徴点の特定が容易であり、ステレオマッチングが容易となる。
【0021】
又本発明によれば、前記3次元モデルに前記合成した光スペクトル画像の波長成分の情報を重合するので、3次元位置情報に加え光スペクトル情報を含む4次元の画像を取得することができる。
【0022】
又本発明によれば、飛行体と、該飛行体に設けられたGPS装置と、該飛行体の飛行を制御する制御装置と、該飛行体に搭載され、時系列に連続するフレーム画像で構成される動画像を取得する第1カメラと、該第1カメラと既知の関係に設けられ、測定対象の光スペクトル画像を取得する第2カメラと、撮像制御装置とを具備し、前記飛行体は第1地点で静止飛行を行い、静止飛行後第2地点に移動し、該第2地点で静止飛行を行い、前記GPS装置は、第1地点、第2地点の地心座標系の位置を測定し、前記第1カメラは第1地点の静止画像を取得すると共に第1地点から第2地点に移動中に動画像を取得し、更に第2地点の静止画像を取得し、前記第2カメラは第1地点の静止飛行中に所定波長領域の光スペクトル画像を複数取得すると共に第2地点の静止飛行中に所定波長領域の光スペクトル画像を複数取得し、前記撮像制御装置は、第1地点の静止画像から複数の特徴点を抽出し、第1地点から第2地点に移動中の動画像により、動画像トラッキングを行い第2地点の静止画像に前記特徴点を特定し、特徴点に基づき第1地点の静止画像と第2地点の静止画像とをステレオマッチングすると共に前記第1地点及び第2地点の地心座標系の位置に基づき3次元モデルを形成し、又前記撮像制御装置は、第1地点の複数の光スペクトル画像を合成して第1光スペクトル合成画像を作成し、又第2地点の複数の光スペクトル画像を合成して第2光スペクトル合成画像を作成し、第1光スペクトル合成画像、第2光スペクトル合成画像の少なくとも一方と、前記3次元モデルとを合成し、前記測定対象の3次元位置データと光スペクトル情報を有する4次元モデルを作成するので、上空からの4次元モデルが容易に取得可能となり、測定対象の任意の位置の3次元位置データと光スペクトル情報が簡単に得られる。
【0023】
又本発明によれば、前記第1カメラは前記静止飛行状態で同位置動画像を取得し、前記撮像制御装置は、前記同位置動画像のフレーム画像に同期させ、前記第2カメラで光スペクトル画像を取得し、フレーム画像間で画像トラッキングを行い、時間的に連続する2つの光スペクトル画像に対応する2つのフレーム画像の画像マッチングを行い、該画像マッチングで得られた条件で前記2つの光スペクトル画像を合成し、前記フレーム画像の画像マッチングと光スペクトル画像の合成とを順次繰返し、前記静止飛行状態で取得した全ての光スペクトル画像を合成するので、飛行体が完全に静止していない状態で取得した複数の光スペクトル画像間にずれがあった場合も、前記フレーム画像の画像マッチングを介して光スペクトル画像間の位置合せ或はマッチングを行うことができ、精度の高い光スペクトル合成画像を作成することができる。
【0024】
又本発明によれば、飛行体と、該飛行体に設けられたGPS装置と、前記飛行体の飛行を制御する制御装置と、該飛行体に搭載され、時系列に連続するフレーム画像で構成される動画像を取得する第1カメラと、前記第1カメラと既知の関係に設けられ、測定対象の光スペクトル画像を取得する第2カメラと、撮像制御装置とを具備し、前記飛行体は第1地点から第2地点に移動し、前記GPS装置は、第1地点、第2地点の地心座標系の位置を測定し、前記第1カメラは第1地点の静止画像を取得すると共に第1地点から第2地点に移動中に動画像を取得し、更に第2地点の静止画像を取得し、前記第2カメラは第1地点から第2地点の移動途中に所定波長領域の光スペクトル画像を複数取得し、前記撮像制御装置は、第1地点の静止画像から複数の特徴点を抽出し、第1地点から第2地点に移動中の動画像により、動画像トラッキングを行い第2地点の静止画像に前記特徴点を特定し、該特徴点に基づき第1地点の静止画像と第2地点の静止画像とをステレオマッチングすると共に前記第1地点及び第2地点の地心座標系の位置に基づき3次元モデルを形成し、又前記撮像制御装置は、複数の光スペクトル画像を合成して光スペクトル合成画像を作成し、前記3次元モデルと前記光スペクトル合成画像とを合成し、前記測定対象の3次元位置データと光スペクトル情報を有する4次元モデルを作成するので、上空からの4次元モデルが容易に取得可能となり、測定対象の任意の位置の3次元位置データと光スペクトル情報が簡単に得られる。
【0025】
又本発明によれば、前記撮像制御装置は、前記動画像のフレーム画像に同期させ、前記第2カメラで光スペクトル画像を取得し、フレーム画像間で画像トラッキングを行い、時間的に連続する2つの光スペクトル画像に対応する2つのフレーム画像の画像マッチングを行い、該画像マッチングで得られた条件で前記2つの光スペクトル画像を合成し、前記フレーム画像の画像マッチングと光スペクトル画像の合成とを順次繰返し、前記移動途中に取得した全ての光スペクトル画像を合成するので、飛行体が移動中に取得した複数の光スペクトル画像を、前記フレーム画像の画像マッチングを介して光スペクトル画像間の位置合せ或はマッチングを行うことができ、精度の高い光スペクトル合成画像を作成することができるという優れた効果を発揮する。
【図面の簡単な説明】
【0026】
【図1】本発明に係る撮像装置が搭載された小型飛行体を示す概略図である。
【図2】該撮像装置のカメラ部及び撮像制御装置の概略構成図である。
【図3】飛行体が2地点で撮影した画像から飛行体の高度、測定点の座標の測定を行う写真測量の原理を示す説明図である。
【図4】写真測量で、カメラが傾斜している場合の相互標定についての説明図である。
【図5】本発明の実施例に用いられる透過型の干渉フィルタを有するスペクトルカメラの光学系を示す説明図であり、(A)は絞り孔が光軸と一致した状態を示し、(B)は絞り孔が光軸と離反した状態を示している。
【図6】入射角と透過するピーク波長の関係を示すグラフである。
【図7】干渉フィルタへの入射角に対応する波長透過特性を示すグラフである。
【図8】本発明の実施例に用いられる他のスペクトルカメラで、反射型の干渉フィルタを有する光学系を示す説明図であり、(A)は絞り孔が光軸と一致した状態を示し、(B)は絞り孔が光軸と離反した状態を示している。
【図9】本発明の実施例に用いられる更に他のスペクトルカメラで、反射型の干渉フィルタを有する光学系を示す説明図であり、(A)は絞り孔が光軸と一致した状態を示し、(B)は絞り孔が光軸と離反した状態を示している。
【図10】特性の異なる複数の干渉膜を備えた干渉フィルタを示す正面図である。
【図11】本実施例に於いて、ハイパースペクトル画像を取得する状態を示す説明図である。
【図12】ホバリング状態で画像を複数枚取得した場合の画像間の状態を示す説明図である。
【図13】本発明の実施例の作用を示すフローチャートである。
【図14】図13中のSTEP:03及びSTEP:08の詳細を示すフローチャートである。
【図15】本発明の第2の実施例の作用を示すフローチャートである。
【発明を実施するための形態】
【0027】
以下、図面を参照しつつ本発明の実施例を説明する。
【0028】
本発明の実施例に係る画像取得装置は、小型無人飛行体、例えば遠隔操作可能な小型ヘリコプタ或は自律飛行可能な小型ヘリコプタに搭載される。
【0029】
図1は、本実施例に係る画像取得装置を搭載した小型飛行体1を示している。
【0030】
図1中、2は地上に設置される基地制御装置であり、該基地制御装置2は、前記飛行体1とデータ通信可能であり、前記飛行体1の飛行の制御、飛行計画の設定、変更、前記飛行体1が収集した情報を保存、管理する。
【0031】
前記飛行体1は、例えば自律飛行する小型飛行体としてのヘリコプタである。該ヘリコプタ1は前記基地制御装置2から遠隔操作で操縦され、或は前記基地制御装置2から前記ヘリコプタ1の制御装置(図示せず)に飛行計画が設定され、該制御装置が航行手段(後述)を制御し、飛行計画に従って、自律飛行する。又、制御装置は、航行手段を制御し、ヘリコプタ1を所定の速度、所定の高度での飛行に制御すると共に、所定位置でホバリング(静止飛行状態)に制御することが可能である。
【0032】
前記ヘリコプタ1は、機体3、該機体3に設けられた所要数のプロペラ、例えば前後左右、計4組のプロペラ4,5,6,7を有し、該プロペラ4,5,6,7はそれぞれ個別にモータ(図示せず)に連結され、又該モータは独立して駆動が制御される様になっている。尚、前記プロペラ4,5,6,7及び前記モータ等は飛行体の航行手段を構成する。
【0033】
前記機体3には、前記ヘリコプタ1の基準位置を測定するGPS装置9が設けられている。
【0034】
前記ヘリコプタ1の機体3には、撮像装置11が搭載されている。前記撮像装置11は光軸12を有し、該光軸12は下方に延出し、前記撮像装置11は前記ヘリコプタ1の下方を撮像する様になっている。
【0035】
次に、図2により、前記撮像装置11の概略構成を説明する。
【0036】
該撮像装置11は、カメラ部13及び撮像制御装置21を有し、該撮像制御装置21は前記カメラ部13が撮像した画像データ及び前記GPS装置9からの位置情報に基づき測定対象物の写真測量を行い、或は前記画像データと前記カメラ部13が取得した光スペクトルデータの合成等の処理を行う。
【0037】
先ず、前記カメラ部13について説明する。
【0038】
該カメラ部13は、第1カメラとして画像カメラ14及び第2カメラとしてスペクトルカメラ15を具備し、前記光軸12はハーフミラー16によって分割され、一方の光軸12a上に前記画像カメラ14が設けられ、他方の光軸12b上に前記スペクトルカメラ15が設けられている。前記画像カメラ14は、測定対象物のありのままの画像(リアル画像)を取得し、前記スペクトルカメラ15は光スペクトル画像を取得する。
【0039】
上記した様に、前記画像カメラ14と前記スペクトルカメラ15とは前記光軸12を共有しており、前記画像カメラ14と前記スペクトルカメラ15とは既知の関係となっている。又、前記画像カメラ14と前記スペクトルカメラ15とを分離して設けてもよい。この場合も前記画像カメラ14と前記スペクトルカメラ15の光軸は平行に設定され、光軸間の距離は既知とされ、前記画像カメラ14と前記スペクトルカメラ15は既知の関係に設定される。
【0040】
前記画像カメラ14は測定個所の画像を撮像し、デジタルの画像データを出力するものであり、静止画像を所定時間間隔で撮像するカメラであってもよいし、或は画像を連続的に撮像するビデオカメラであってもよい。
【0041】
又、前記画像カメラ14は、撮像素子14aとして、画素(ピクセル)の集合体であるCCD、或はCMOSセンサを有しており、前記撮像素子14aの中心(受光面の座標中心)を前記光軸12aが垂直に通過する様に該光軸12aと前記撮像素子14aとの関係が設定されている。従って、前記撮像素子14aの各画素は撮像素子14a上の位置(座標)が特定でき、更に各画素の画角(前記光軸12に対する角度)が分る様になっている。
【0042】
前記スペクトルカメラ15は、前記画像カメラ14と同様、撮像素子15aとして、画素(ピクセル)の集合体であるCCD、或はCMOSセンサを有しており、該撮像素子15aの中心(受光面の座標中心)を前記光軸12bが垂直に通過する様に該光軸12bと前記撮像素子15aとの関係が設定されている。従って、前記撮像素子15aの各画素は撮像素子15a上の位置(座標)が特定でき、該撮像素子15aの各画素の画角(前記光軸12に対する角度)が分る様になっている。更に、前記撮像素子15aの各画素と前記撮像素子14aの各画素とは、1:1に対応している。
【0043】
前記撮像制御装置21について説明する。
【0044】
該撮像制御装置21は、演算制御部(CPU)22、画像データ記録部23、画像コントローラ24、カメラ制御部25、スペクトルカメラコントローラ26、スペクトルデータ記憶部27、画像合成部28、画像処理部29、特徴抽出部31、マッチング部32、測定部33、モデル画像形成部34、表示部35、記憶部36を具備している。
【0045】
前記カメラ制御部25は、前記画像カメラ14、前記スペクトルカメラ15を同期制御するものであり、前記画像コントローラ24は前記カメラ制御部25からの指令信号に基づき前記画像カメラ14を駆動し、画像データ(リアル画像データ)を撮像し、取得した画像データは撮像時間に関連付けて前記画像データ記録部23に格納される。
【0046】
又、前記スペクトルカメラコントローラ26は前記カメラ制御部25からの指令に基づき前記スペクトルカメラ15を駆動し、光スペクトル画像データを取得し、取得した光スペクトル画像データは時間に関連付けられて前記スペクトルデータ記憶部27に格納される。
【0047】
前記画像合成部28は、前記画像データ記録部23に格納された画像データと前記スペクトルデータ記憶部27に格納された光スペクトル画像データとを合成し、1つの画像の全ピクセル(画素)に光スペクトル情報を有するハイパースペクトル画像を合成するものである。
【0048】
前記画像処理部29は前記特徴抽出部31、前記マッチング部32を具備し、1フレームの画像データから特徴点(パスポイント)を少なくとも5以上抽出し、時間的に異なる画像データ或は、異なる撮像位置から取得した画像データについて前記特徴点に基づき画像のトラッキング或はマッチングを行うものである。
【0049】
尚、画像トラッキング、画像マッチングについては、SSDA法(sequential similarity detection algorithm)、正規化相互相関法、最小2乗マッチング法等が用いられる。
【0050】
前記測定部33は、異なる撮像位置から前記画像カメラ14で取得した2つの画像データに基づき写真測量を実行するものである。
【0051】
前記モデル画像形成部34は、前記ハイパースペクトル画像に前記測定部33で測定した各画素の距離データを関連付け、2次元位置データ(平面座標データ)+光スペクトルデータ+高さデータの4次元のデータを有するモデル画像を形成する。
【0052】
前記記憶部36には、カメラ制御に必要なプログラム、画像データと光スペクトル画像データの合成に必要なプログラム、画像処理に必要なプログラム、測定に必要なプログラム、モデル画像を形成する為に必要なプログラム、前記表示部35を制御する為のプログラム等の各種プログラムが格納されている。尚、前記記憶部36の一部に前記画像データ記録部23、前記画像コントローラ24を形成してもよい。
【0053】
次に、図3及び図4により、写真測量による距離測定について説明する。
【0054】
図3に於いて、前記ヘリコプタ1はO1 地点からO2 地点へ飛行し、O1 地点とO2 地点で撮像したとする。又、O1 地点からO2 地点迄の距離Bは撮影基線長であり、41-1,41-2は、それぞれO1 地点、O2 地点での前記撮像装置11の撮像素子41を示し、画像データと同等である。尚、図3では、前記撮像装置11の光軸12は鉛直、即ち前記ヘリコプタ1は水平姿勢の場合を示している。
【0055】
O1 地点で撮像した測定点Pの画像上(即ち撮像素子上)の位置は、p1 (x1 ,y1 )、O2 地点で撮像した測定点Pの画像上(即ち撮像素子上)の位置は、p2 (x2 ,y2 )となる。前記撮像装置11の焦点距離f、前記撮影基線長BからP迄の距離Z(前記ヘリコプタ1の高さ距離)は、3角形O1 ,O2 ,Pと3角形O1 ,p1 及び3角形O2 ,p2 との相似関係から、Z=−Bf/(x1 +x2 )となる。
【0056】
ここで、前記O1 地点、O2 地点の地上座標は前記GPS装置9によって測定でき、又前記撮影基線長Bは前記O1 地点とO2 地点の2点間の距離となり、前記GPS装置9の測定結果に基づき前記撮影基線長Bを求めることができる。又、測定点Pの地心位置(平面座標)も、同様にp1 (x1 ,y1 )及びp2 (x2 ,y2 )と前記GPS装置9で測定したO1 地点、O2 地点の地心位置から求めることができる。
【0057】
従って、前記ヘリコプタ1が移動する過程で順次撮像した2つの画像から、ヘリコプタ1の高度(地表からの高さ)をリアルタイムで測定(高さ距離測定)することができる。
【0058】
上記写真測量に於いて、p1 (x1 ,y1 )及びp2 (x2 ,y2 )は、O1 地点で撮像した左画像42と、O2 地点で撮像した右画像43との共通の点に対応するものであり、パスポイントと呼ばれる。
【0059】
前記左画像42中のp1 点は、前記O1 地点で取得した左画像42についてエッジ処理等の画像処理をすることで特徴点として求められる。尚、図4中では1つを示しているが、実際には多数の点が特徴点として抽出される。
【0060】
又、前記p1 点に対応する前記p2 点を右画像43中に特定する作業は、動画像トラッキングによって行う。尚、動画像は、時系列に連続するフレーム画像によって構成されている。
【0061】
動画像トラッキングは、O1 地点からO2 地点に至る間中、動画像(フレーム画像)を取得し続け、1つのフレーム画像中に、前記p1 点を含む所定範囲を検索範囲に設定する。時間的に隣接する次フレーム画像中の検索範囲中でp1 点と対応する点を検索し、更に特定する。次フレーム画像に対して所定範囲での検索と、特定を順次繰返し、最終的に右画像43中に前記p2 点を特定するものである。
【0062】
尚、動画像トラッキングについては特許文献2に記載されている。
【0063】
前記ヘリコプタ1は図示しない飛行制御部によって水平に制御されているが、風等の影響で、水平状態が崩れることがある。この為、O1 地点での前記撮像装置11の姿勢と、O2 地点での撮像装置11の姿勢とが異なる場合がある。図4は、O1 地点で撮像した際の撮像素子41-1の状態とO2 地点で撮像した際の撮像素子41-2の傾きの状態を示す模式図である。又、前記撮像素子41-1で得られる左画像42、前記撮像素子41-2で得られる右画像43も同様な状態となっている。
【0064】
画像の傾きは、光軸12の鉛直(Z軸)を基準とすると、Z軸を中心とする回転角κ、水平第1軸(X軸)を中心とした回転角ω、水平第2軸(Y軸)を中心とした回転角φによって表され、O1 地点で撮像した画像とO2 地点で撮像した画像とをκ,ω,φを変数として相互標定することで、図中破線で示す状態(図3の状態)に変換することができる。又、相互標定することで、測定点Pの3次元座標が演算でき、更にO1 地点、O2 地点でのヘリコプタ1の高度を測定できる。
【0065】
ここで、O1 地点、O2 地点での前記3軸の回転角は、図示しないジャイロユニットによって測定でき、O1 地点での画像中のp1 の座標(x1 ,y1 )、O2 地点での画像中のp2 の座標(x2 ,y2 )は、撮像素子41の画素の位置から測定できる。従って、相互標定後の変換座標系でのp1 の座標を(X1 ,Y1 ,Z1 )とし、相互標定後の変換座標系(モデル座標)でのp2 の座標を(X2 ,Y2 ,Z2 )、撮像装置11の焦点距離をfとすれば、
【0066】
変換座標系(モデル座標)でのp1 ,p2 の座標は以下に表される。
【0067】
X1 =x1 cosφ1 ・cosκ1 −y1 cosφ1 ・sinκ1 −fsinφ1
Y1 =x1 sinκ1 −y1 cosκ1
Z1 =−x1 sinφ1 ・cosκ1 −y1 sinφ1 ・sinκ1 −fcosφ1
X2 =x2 cosφ2 ・cosκ2 −y2 cosφ2 ・sinκ2 −fsinφ2 +1
Y2 =x2 (cosω2 sinκ2 +sinω2 ・sinφ2 cosκ2 )+
y2 (cosω2 cosκ2 −sinω2 ・sinφ2 ・sinκ2 )+
fsinω2 ・cosφ2
Z2 =x2 (sinω2 ・sinκ2 −cosω2 ・sinφ2 ・cosκ2 )+
y2 (sinω2 ・cosκ2 +cosω2 ・sinφ2 ・sinκ2 )−
fcosω2 ・cosφ2
【0068】
従って、得られたp1 の座標(X1 ,Y1 ,Z1 )、p2 の座標(X2 ,Y2 ,Z2 )に基づき図3で示したと同様にして測定点Pの3次元座標を演算(絶対標定)することができる。
【0069】
次に、本実施例で使用されるスペクトルカメラ15の1例について、図5を参照して説明する。
【0070】
図5は該スペクトルカメラ15の光学系45を示している。
【0071】
図5中、46は該光学系45の光軸を示し、該光軸46上に対物レンズ47、第1リレーレンズ48、第2リレーレンズ49、第3リレーレンズ50、結像レンズ51、撮像素子52が配設される。又、図5中、53は前記対物レンズ47によって結像された像を示し、又fは前記第2リレーレンズ49の焦点距離を示している。尚、前記対物レンズ47及び前記第1リレーレンズ48は第1光学系を模式的に示しており、又前記第2リレーレンズ49は第2光学系を模式的に示している。
【0072】
前記第1リレーレンズ48の前記第2リレーレンズ49側に光束選択部材である絞り55が配設される。該絞り55は、図中紙面に対して垂直な方向に延びるスリット状の絞り孔55aを有している。又、該絞り55は前記第2リレーレンズ49の物側焦点位置又は略物側焦点位置に配設され、該絞り55は前記光軸46に対して垂直な方向(前記絞り孔55aと直交する方向)に移動可能に支持され、前記絞り55はリニアモータ等の適宜な位置変位手段により位置が変更される様になっている。
【0073】
ここで、前記絞り55、前記第2リレーレンズ49はテレセントリック光学系56を構成する。前記第1リレーレンズ48を透過した光束は、前記テレセントリック光学系56によって平行な多数の光束(主光線57)に分割される。
【0074】
該主光線57の集光位置(前記第2リレーレンズ49による結像位置、或は略結像位置)に透過型の干渉膜が形成された干渉フィルタ58が配設される。該干渉フィルタ58は波長選択フィルタとして機能し、前記干渉フィルタ58を通過した特定波長の光線が前記第3リレーレンズ50及び前記結像レンズ51によって前記撮像素子52上に結像される。結像された像は、特定波長に形成され2次元の像となる。
【0075】
前記干渉フィルタ58は、該干渉フィルタ58に入射する光線の入射角によって波長選択特性が変化する性質を有する。図6は、入射角と透過するピーク波長の関係(ピーク波長の入射角依存性)を示しており、入射角を変化させることでピーク波長が変化していることが分る。
【0076】
又、図5(A)は、前記絞り55の前記絞り孔55aが前記光軸46上に位置しており、この場合前記主光線57は前記光軸46と平行となる。次に、図5(B)に示す様に前記絞り55を移動させた場合、例えば図示の様に、上方に移動させると、前記主光線57は前記光軸46に対して傾斜する。即ち、前記干渉フィルタ58に対する入射角が変化する。従って、前記絞り55を移動させることで前記干渉フィルタ58を透過する波長を変化させることが可能となる。
【0077】
例えば、図6を参照すれば、前記干渉フィルタ58に対する入射角を0゜〜50゜に変化させると、透過する波長のピークは600nm〜520nmに変化する。即ち、前記干渉フィルタ58は、600nm〜520nmの波長選択範囲Wを有することになる。図7は、前記干渉フィルタ58への入射角に対応する波長透過特性を示している。
【0078】
次に、図5では、前記干渉フィルタ58を前記光軸46に対して傾斜させているが、図6に示される様に入射角依存性は入射角が10゜を超えた辺りからリニアとなる。従って、予め前記干渉フィルタ58を傾斜させておくことで、前記絞り55の変位に対する選択波長の変化が効果的に得られる。
【0079】
従って、前記絞り55を変位させる度に、前記撮像素子52より画像を取得することで、図6の波長透過特性を有する干渉フィルタ58を使用すれば、600nm〜520nmの波長範囲での光スペクトルを取得することができる。又、600nm〜520nmを超える波長範囲での光スペクトルを取得する場合は、異なる波長選択範囲W′を有する干渉フィルタに交換すればよい。
【0080】
図7は、前記干渉フィルタ58の角度を0°,10°,20°,30°,40°と変化させた場合に得られる光スペクトルの一例を示している。
【0081】
図8は、図5で示した光学系45の変更例を示している。
【0082】
図5で示した前記光学系45では、透過式の干渉フィルタ58を用いたが、図8で示される様に、反射式の干渉フィルタ58′を用いて光学系45′を構成することもできる。前記干渉フィルタ58′は反射鏡に反射型の干渉膜を形成したものである。前記光学系45′では前記干渉フィルタ58′が光を反射することで波長が選択される。
【0083】
尚、図8中、図5中で示したものと同等のものには同符号を付してあり、その説明を省略する。
【0084】
上記変更例でも、図8(B)に示される様に、前記絞り55を移動させることで、前記干渉フィルタ58′への主光線57の入射角が変化し、所定の波長選択範囲W内での特定波長が選択反射される。
【0085】
前記干渉フィルタとして反射型のフィルタ58′を用いることで、光学系45′をコンパクトにすることができる。
【0086】
図9、図10は更に他の変更例を示している。
【0087】
図9、図10で示す変更例は、図8で示した光学系45′と同等の構成であり、反射式の干渉フィルタ62を用いている。
【0088】
該干渉フィルタ62は、図10で示す様に形状が円板であり、回転軸59を介して回転可能に支持されている。該干渉フィルタ62は反射面が円周方向に所要角度に等分(図示では6等分)されている。反射面が分割されることで所要数(図示では6)の分割反射面63a〜63fが形成され、各分割反射面63a〜63f毎に波長選択特性の異なる反射干渉膜が形成されている。
【0089】
例えば、分割反射面63aには選択波長λ1が400nm〜450nm、分割反射面63bには選択波長λ2が450nm〜525nm、分割反射面63cには選択波長λ3が525nm〜650nm、分割反射面63dには選択波長λ4が650nm〜750nm、分割反射面63eには選択波長λ5が750nm〜870nm、分割反射面63fには選択波長λ6が870nm〜950nmの反射干渉膜がそれぞれ形成される。
【0090】
光軸46上に対物レンズ47、第1リレーレンズ48、絞り55が配置され、前記光軸46と平行で所定量離反した光軸上に第2リレーレンズ49が配設され、該第2リレーレンズ49に対向して前記干渉フィルタ62が設けられている。該干渉フィルタ62で反射された光束は、反射鏡64によって偏向され、偏向された光束は結像レンズ51を経て撮像素子52に結像される。図10中、57aが前記主光線57の結像を示す。
【0091】
該他の変更例では、第1リレーレンズ48、絞り55が前記第2リレーレンズ49の光軸46とはずれた位置にあるので、テレセントリック光学系56によって分割された主光線57は前記干渉フィルタ62に傾斜して入射する。更に、図9(B)に示される様に、前記絞り55を前記光軸46より離反する様に移動させれば、前記主光線57の入射角は更に大きくなる。従って、前記絞り55を移動させることで選択波長を変更することができる。
【0092】
更に、得たい光スペクトルが、400nm〜950nmに及ぶ時は、前記分割反射面63aから前記分割反射面63f迄、順次分割反射面を切替え、切替えられた分割反射面63毎に前記絞り55を移動させ、該絞り55の移動位置毎の波長で画像を取得する。又、前記分割反射面63a〜63fの切替えと、前記絞り55の移動は同期して行われ、前記分割反射面63の切替えが行われる毎に、スリット孔が前記光軸46の位置から最も離反する位置(基準位置)に復帰し、更に所定量毎に前記絞り55が移動される。
【0093】
而して、前記干渉フィルタ62の回転と前記絞り55の移動の協動により、400nm〜950nm迄の範囲で波長が選択され、選択した波長毎に前記撮像素子52で画像が取得され、400nm〜950nmの全域での光スペクトルを取得することができる。
【0094】
尚、得たい光スペクトルの波長範囲が限られている場合は、該当する波長選択特性を有する分割反射面を選択して光スペクトルを取得すればよい。
【0095】
尚、上記干渉フィルタ62は円板とし、回転可能としたが、長矩形形状とし、干渉フィルタ62を長手方向に分割して、分割反射面を形成し、前記干渉フィルタ62を長手方向にスライドさせ、分割反射面の切替えを行ってもよい。
【0096】
又、上記図5に示した実施例に於いて、透過型の干渉フィルタ58の円板を所定等分し、分割部分に異なる波長特性を有する干渉膜を形成し、図9、図10で示す変更例と同様に、前記干渉フィルタ58を回転させて、それぞれの分割部分で光スペクトル画像を取得する様にしてもよい。
【0097】
以下、本実施例に於ける作動を図11を参照して説明する。尚、以下の説明は、スペクトルカメラ15として、図5で示した光学系45、或は図8、図9で示した光学系45′で、更に干渉フィルタが分割され、而も分割された部位が異なる透過特性を有する場合を説明する。
【0098】
上記した様に、本実施例では、リアル画像と光スペクトル画像を取得する。
【0099】
前記画像カメラ14によりO1 地点で静止画像(左画像42)を取得し、又前記GPS装置9でO1 地点の位置の測定が行われる。取得された静止画像は前記画像データ記録部23に格納され、更にO1 地点での静止画像から前記画像処理部29により特徴点が少なくとも5以上(好ましくは多数)抽出される。O1 地点からO2 地点に移動する際には前記特徴点について動画像によるトラッキングを行う。更に、前記画像カメラ14によりO2 地点で静止画像(右画像43)を取得する。前記GPS装置9により、O2 地点の位置測定が行われる。前記画像処理部29により、O2 地点での静止画像中に前記特徴点を少なくとも5つ特定し、該特徴点に基づきO1 地点での静止画像とO2 地点での静止画像についてマッチングを行う。更に前記測定部33により、O1 地点で取得した静止画像と、O2 地点で取得した静止画像により、写真測量を行う。
【0100】
又O1 地点、O2 地点で静止画像を取得すると同時に、前記スペクトルカメラ15により光スペクトル画像を取得する。
【0101】
光スペクトル画像を取得する為には、前記ヘリコプタ1を静止させ(ホバリング)、前記絞り55の位置を順次変更し、前記干渉フィルタ58が選択する波長を変更し、選択された波長毎に画像を取得する。光スペクトル画像の取得は、予め設定した波長の範囲で実行される。
【0102】
設定された波長の範囲(λ1〜λn)が、1つの干渉膜で前記主光線57の入射角を変更して得られる波長の範囲を超える場合は、前記干渉フィルタ58を回転させ、前記主光線57が入射する部位の波長特性を変更し、更に前記絞り55の移動で得られる波長範囲の光スペクトルを取得する。
【0103】
上記の如くして取得された光スペクトル画像は、前記スペクトルデータ記憶部27に格納される。
【0104】
O1 地点及びO2 地点について格納された光スペクトル画像をそれぞれ合成することで、O1 地点及びO2 地点での所定波長範囲(λ1〜λn)の光スペクトル画像を含む光スペクトル合成画像が合成される。更に、合成されたO1 地点の光スペクトル合成画像とO1 地点の前記静止画像とを合成することでO1 地点で取得したハイパースペクトル画像が合成され、更に合成されたO2 地点の光スペクトル合成画像とO2 地点の前記静止画像とを合成することでO2 地点で取得したハイパースペクトル画像が合成される。
【0105】
更に、前記特徴点に基づきO1 地点での静止画像とO2 地点での静止画像について画像マッチング(ステレオマッチング)を行い、更に写真測量の結果を静止画像に関連付けることで、3次元位置データを有する画像(3Dモデル画像)を作成でき、更に前記O1 地点の光スペクトル合成画像、O2 地点の光スペクトル合成画像の少なくとも一方を前記3Dモデル画像に関連付ける。
【0106】
上記した様に、静止画像と光スペクトル画像は1:1で対応しているので、静止画像中に一点を指定すれば、光スペクトル合成画像から直ちに指定した点の光スペクトルが得られ、更に3Dモデル画像から3次元位置データを得ることができる。
【0107】
而して、O1 地点及びO2 地点でのハイパースペクトル画像が取得できると共に、光スペクトル情報を有する3Dモデル画像、即ち4Dモデル画像を取得することができる。
【0108】
従って、作物の発育状態を光スペクトルから、或は作物の3次元データから大きさを認識することが可能である。或は、地表の状態を露出した物質の種類の情報も合わせて取得することができる。
【0109】
次に、前記ヘリコプタ1をホバリングさせ、光スペクトル画像を取得している状態では、常に姿勢が変動しており、完全に静止しているとは言えない。従って、各波長毎に取得した画像には、多少のズレがある。この為、前記スペクトルデータ記憶部27に格納された光スペクトル画像をそのまま合成すると、誤差が生じ、或はぼやける等の問題が生じる。
【0110】
図12は、ホバリング状態で、選択した波長がλ1,λ2,λ3,λ4の光スペクトル画像を取得している状態を示しており、図12(A)のS1は、ホバリング状態で撮像装置11が完全に静止している状態、S2は撮像装置11が変動している状態を示している。又図12(B)は、前記撮像装置11が変動している状態で取得したλ1,λ2,λ3,λ4の光スペクトル画像を、時間的な経過に合わせて展開した図である。尚、図中、黒丸は抽出した特徴点である。図12(A)、図12(B)から分る様に、画像をそのまま合成すると、各画像間で特徴点は合致せず、誤差が生じ、或はぼやけることが分る。
【0111】
従って、ホバリング状態で各波長毎に取得した光スペクトル画像を合成できる様にマッチング(相対的な位置合せ)する必要がある。
【0112】
前記スペクトルカメラ15により、光スペクトル画像を撮像中も、前記スペクトルカメラ15と同期させて前記画像カメラ14によりリアル画像が所定時間間隔で(或は連続画像で)取得され、画像トラッキングが行われる。
【0113】
各フレーム画像毎に特徴点が抽出され、時間的に隣接するフレーム画像について特徴点についての画像トラッキングが順次行われ、時間的に先行するフレーム画像(以下第1フレーム画像)で得られた特徴点が後のフレーム画像(以下第2フレーム画像)中に特定される。
【0114】
特徴点に基づき前フレーム画像と次フレーム画像を位置合せし、その位置合せで得られた条件に基づき前フレーム画像に対応する前記光スペクトル画像と次フレーム画像に対応する次光スペクトル画像との位置合せ(マッチング)を行うことができる。
【0115】
又、光スペクトル画像が所定フレーム画像枚数毎に取得される場合は、フレーム画像に関しては連続して画像トラッキングが実行される。
【0116】
画像トラッキングにより、時間的に先行する光スペクトル画像(以下第1光スペクトル画像)に対応する第1フレーム画像に対して特徴点が特定され、更に時間的に隣接する光スペクトル画像(第2光スペクトル画像)に対応する第2フレーム画像に対しても特徴点が特定される。
【0117】
第1フレーム画像と第2フレーム画像間で時間の経過があり、両フレーム画像間で光軸の傾き等が生じた場合は、両フレーム画像間で特徴点に基づき座標変換が実行され、画像マッチングが行われる。
【0118】
上記した様に、前記画像カメラ14で取得したリアル画像と、該リアル画像と同期して取得した光スペクトル画像とは、1:1で対応しているので、第1フレーム画像と第2フレーム画像との座標変換で得られた条件は、そのまま第1光スペクトル画像と第2光スペクトル画像のマッチングに適用することができる。
【0119】
而して、リアル画像のマッチングと並行して光スペクトル画像のマッチング(合成)を行うことで、誤差のない光スペクトル画像の合成を行うことができる。
【0120】
この光スペクトル画像の合成を、ホバリング状態で取得する光スペクトル画像全てについて順次実行することで、静止状態と同様な光スペクトル合成画像を取得することができる。
【0121】
上記した写真測量、光スペクトル画像、ハイパースペクトル画像の取得合成等について、図13、図14を参照して更に説明する。
【0122】
STEP:01 前記ヘリコプタ1をO1 地点でホバリングを開始し、該O1 地点で前記画像カメラ14により左画像42を取得する。又、前記GPS装置9によるヘリコプタ1の位置(即ちO1 地点)の測定が行われる。
【0123】
STEP:02 取得した左画像42をエッジ処理する等して特徴点を抽出する。
【0124】
STEP:03 前記画像カメラ14で動画像を取得しつつ、該画像カメラ14と同期させて前記スペクトルカメラ15により光スペクトル画像を取得する。又、光スペクトル画像を取得することと並行して動画像による同位置での画像トラッキング(以下、同位置トラッキング)が実行され、動画像トラッキングの結果に基づき各光スペクトル画像間での画像位置補正が実行される。
【0125】
O1 地点での光スペクトル画像の取得、画像位置補正について、STEP:21〜STEP:25により説明する。
【0126】
STEP:21、STEP:221 所定波長領域(λ1〜λn)の光スペクトル画像が、各波長毎に所定の時間間隔で取得される。取得された光スペクトル画像は時系列に前記スペクトルデータ記憶部27に格納される。又、光スペクトル画像の取得と並行して動画像(前記画像カメラ14により取得されるリアル画像)が取得される(STEP:222)。光スペクトル画像が取得される時間間隔も前記動画像は取得され続けており、動画像を構成するフレーム画像間で画像トラッキングが実行される。
【0127】
STEP:223、STEP:224 画像トラッキング(同位置トラッキング)は、光スペクトル画像(λ1)の取得と時間的に同期しているフレーム画像(第1フレーム画像)から特徴点を抽出し、時間的に隣接する次フレーム画像に特徴点を画像トラッキングにより特定する。画像トラッキングは継続して実行され、時間的に隣接する次の光スペクトル画像(λ2)と同期したフレーム画像(第2フレーム画像)に特徴点を特定する。
【0128】
STEP:23 得られた第1フレーム画像の特徴点と第2フレーム画像の特徴点とに基づき第1フレーム画像と第2フレーム画像間のマッチング、第1フレーム画像と第2フレーム画像との間の座標変換が実行される。
【0129】
前記画像カメラ14と前記スペクトルカメラ15とは同軸で画像を取得しており、フレーム画像の各画素と前記光スペクトル画像の各画素とは1:1で対応しており、前記フレーム画像をマッチングした条件、座標変換の条件は時間的に隣接する前記光スペクトル画像にも適用することができる。
【0130】
STEP:24 全ての波長の光スペクトル画像が取得されているかどうかが判断され、取得されていない場合は、STEP:221、STEP:222に戻り引続き光スペクトル画像の取得、同位置トラッキングが行われる。
【0131】
STEP:25 所定波長領域(λ1〜λn)の全ての波長についての光スペクトル画像が取得されると、全ての光スペクトル画像を動画像トラッキングで得た条件で合成することでO1 地点での所定波長領域(λ1〜λn)の光スペクトルを有する光スペクトル合成画像を取得することができる。更に、光スペクトル合成画像と前記静止画像とを合成することでハイパースペクトル画像を取得することができる。
【0132】
STEP:04〜STEP:06 O1 地点での前記静止画像とハイパースペクトル画像が取得されると、前記ヘリコプタ1がO2 地点に移動する。移動中、前記画像カメラ14により動画像が取得され、画像トラッキング(移動トラッキング)が実行される。移動トラッキングは前記左画像42で抽出した特徴点に基づき実行しても、或はホバリング状態で同位置トラッキングで最終的に得られる特徴点を用いて移動中の画像トラッキングを行ってもよい。
【0133】
STEP:07 前記ヘリコプタ1がO2 地点に到達すると、移動トラッキングが終了される。ホバリングが開始され、右画像43が取得される。
【0134】
STEP:08 ホバリング状態で、前記画像カメラ14で動画像を取得しつつ、該画像カメラ14と同期させて前記スペクトルカメラ15により光スペクトル画像を取得する。又、光スペクトル画像を取得することと並行して動画像による同位置での画像トラッキング(以下、同位置トラッキング)が実行され、動画像トラッキングの結果に基づき各光スペクトル画像間での画像位置補正が実行される。
【0135】
前記STEP:21〜STEP:25が実行され、O2 地点で所定波長領域(λ1〜λn)の全ての波長についての光スペクトル画像が取得され、得られた全ての光スペクトル画像を合成してO2 地点での所定波長領域(λ1〜λn)の光スペクトルを有する光スペクトル合成画像が取得され、更に、光スペクトル合成画像と前記右画像43とを合成することでハイパースペクトル画像が取得される。
【0136】
STEP:09、STEP:10、STEP:11 前記右画像43中に特定された特徴点と、前記左画像42中に特定された特徴点とに基づき、マッチングが行われ、又左画像42又は右画像43のいずれかを基準とする座標変換(相互標定)が行われ、更にGPS装置9の地心座標への座標変換(絶対標定)が行われる。
【0137】
STEP:12、STEP:13 絶対標定の結果を基に左画像42と右画像43とのステレオマッチングが行われ、3次元位置データを有する地形の3Dモデルが得られる。
【0138】
STEP:14 上記した様に、光スペクトル画像と静止画像とは1:1に対応しているので、光スペクトルが得られる位置での3次元位置データが得られ、光スペクトル画像と前記3Dモデルとを合成することで、地形の3次元位置データと光スペクトル情報を有する4次元モデルが作成できる。
【0139】
次に、図15を参照して第2の実施例を説明する。
【0140】
尚、第2の実施例に於いて、図1に示されたヘリコプタ1に図2に示された撮像装置11が搭載された構成は、第1の実施例と同様とし、説明の詳細を省略する。
【0141】
第2の実施例ではO1 地点、O2 地点でホバリングすることなく、画像カメラ14によりO1 地点、O2 地点でそれぞれ左画像42、右画像43の静止画像を取得し、更にO1 地点からO2 地点に連続して移動する過程で、スペクトルカメラ15による光スペクトル画像を取得する。尚、前記ヘリコプタ1の飛行速度は、時間的に前後する光スペクトル画像間で大きなずれが発生しない程度とする。
【0142】
STEP:31〜STEP:38 O1 地点で左画像42を取得する。該左画像42をエッジ処理する等して特徴点を少なくとも5以上抽出する。更に、前記画像カメラ14により連続して動画像が取得され、動画像を構成するフレーム画像中に前記特徴点が特定される。更に、動画像の取得に同期して、各フレーム画像に同期し、或は複数間隔で取得したフレーム画像に同期し、前記スペクトルカメラ15による光スペクトル画像が取得される。
【0143】
時間的に隣接するフレーム画像間で特徴点に基づき画像マッチングが実行され、該画像マッチングの結果に基づき前記フレーム画像に対応する光スペクトル画像のマッチングが行われる。
【0144】
而して、順次取得される光スペクトル画像が、該光スペクトル画像と並行して取得される動画像のマッチング結果に基づき順次マッチングが実行される。O1 地点からO2 地点に到達する迄に波長λ1〜λn迄の予定した波長領域について光スペクトル画像を取得する。尚、光スペクトル画像の合成については、第1の実施例STEP:21〜STEP:25と同様に実行する。
【0145】
O2 地点に到達すると、前記画像カメラ14により右画像43を取得し、該右画像43中に前記左画像42で抽出した特徴点を特定する。尚、前記右画像43中に特徴点を特定する方法は、移動中に画像トラッキングでフレーム画像間で順次トラッキングしていた結果を反映する様にさせればよい。
【0146】
STEP:39、STEP:40、STEP:41 前記右画像43中に特定された特徴点と、前記左画像42中に特定された特徴点とに基づき、マッチングが行われ、又左画像42又は右画像43のいずれかを基準とする相互標定が行われ、更にGPS装置9の地心座標への絶対標定が行われる。
【0147】
STEP:42、STEP:43 絶対標定の結果を基に左画像42と右画像43とのステレオマッチングが行われ、3次元位置データを有する地形の3Dモデルが得られる。
【0148】
STEP:44 更に、光スペクトル画像と前記3Dモデルとを合成することで、地形の3次元位置データと光スペクトル情報を有する4次元モデルが作成できる。
【0149】
上記した様に、第2の実施例では、ホバリング工程を省略すると共にホバリング工程で取得していた光スペクトル画像を前記ヘリコプタ1の移動中に取得する様にしたものである。
【0150】
上記した実施例では、スペクトルカメラ15として干渉フィルタにより選択した特定波長毎に2次元画像を取得し、波長の選択範囲を所望の波長領域とすることで所望の波長領域の光スペクトル画像を取得したが、他のスペクトルカメラを採用することも可能である。他のスペクトルカメラとしてカメラ視野を横断するラインの画像を取得し、取得したラインの画像を回折格子で光スペクトルに分解して画像を取得し、前記ラインをカメラ視野全体に走査することで、光スペクトル画像を取得するものとしてもよい。
【符号の説明】
【0151】
1 ヘリコプタ
2 基地制御装置
3 機体
9 GPS装置
11 撮像装置
12 光軸
13 カメラ部
14 画像カメラ
15 スペクトルカメラ
16 ハーフミラー
21 撮像制御装置
22 演算制御部
28 画像合成部
29 画像処理部
33 測定部
34 モデル画像形成部
35 表示部
36 記憶部
45 光学系
47 対物レンズ
48 第1リレーレンズ
49 第2リレーレンズ
50 第3リレーレンズ
51 結像レンズ
52 撮像素子
55 絞り
56 テレセントリック光学系
57 主光線
58 干渉フィルタ
62 干渉フィルタ
63 分割反射面
64 反射鏡
【特許請求の範囲】
【請求項1】
時系列に連続するフレーム画像で構成される動画像を取得する第1カメラと、該第1カメラと既知の関係にあり、測定対象の光スペクトル画像を複数取得する第2カメラと、撮像制御装置とを具備し、該撮像制御装置は、1つの前記フレーム画像から複数の特徴点を抽出し、該特徴点を時系列に連続するフレーム画像中に順次特定し、前記複数の光スペクトル画像と対応するフレーム画像について前記特徴点に基づきフレーム画像間の画像マッチングを行い、該画像マッチングで得られた条件に基づき前記複数の光スペクトル画像を合成する様構成したことを特徴とする画像取得装置。
【請求項2】
前記フレーム画像と前記光スペクトル画像とが同期して取得され、各フレーム画像の特徴点のフレーム画像上の位置に基づいて各光スペクトル画像の相対的な位置合わせを行う請求項1の画像取得装置。
【請求項3】
前記第1カメラの動画像の第1フレーム画像から少なくとも5点の特徴点が抽出され、該少なくとも5点の特徴点が画像トラッキングにより第nフレーム画像中に特定され、両画像の特徴点に基づきステレオマッチングが行われ、前記測定対象の3次元モデルを形成する請求項1の画像取得装置。
【請求項4】
前記3次元モデルに前記合成した光スペクトル画像の波長成分の情報を重合する請求項3の画像取得装置。
【請求項5】
前記第2カメラが取得する光スペクトル画像は、所定の波長領域に関する2次元画像として取得される請求項1の画像取得装置。
【請求項6】
飛行体と、該飛行体に設けられたGPS装置と、該飛行体の飛行を制御する制御装置と、該飛行体に搭載され、時系列に連続するフレーム画像で構成される動画像を取得する第1カメラと、該第1カメラと既知の関係に設けられ、測定対象の光スペクトル画像を取得する第2カメラと、撮像制御装置とを具備し、前記飛行体は第1地点で静止飛行を行い、静止飛行後第2地点に移動し、該第2地点で静止飛行を行い、前記GPS装置は、第1地点、第2地点の地心座標系の位置を測定し、前記第1カメラは第1地点の静止画像を取得すると共に第1地点から第2地点に移動中に動画像を取得し、更に第2地点の静止画像を取得し、前記第2カメラは第1地点の静止飛行中に所定波長領域の光スペクトル画像を複数取得すると共に第2地点の静止飛行中に所定波長領域の光スペクトル画像を複数取得し、前記撮像制御装置は、第1地点の静止画像から複数の特徴点を抽出し、第1地点から第2地点に移動中の動画像により、動画像トラッキングを行い第2地点の静止画像に前記特徴点を特定し、特徴点に基づき第1地点の静止画像と第2地点の静止画像とをステレオマッチングすると共に前記第1地点及び第2地点の地心座標系の位置に基づき3次元モデルを形成し、又前記撮像制御装置は、第1地点の複数の光スペクトル画像を合成して第1光スペクトル合成画像を作成し、又第2地点の複数の光スペクトル画像を合成して第2光スペクトル合成画像を作成し、第1光スペクトル合成画像、第2光スペクトル合成画像の少なくとも一方と、前記3次元モデルとを合成し、前記測定対象の3次元位置データと光スペクトル情報を有する4次元モデルを作成することを特徴とする画像取得装置。
【請求項7】
前記第1カメラは前記静止飛行状態で同位置動画像を取得し、前記撮像制御装置は、前記同位置動画像のフレーム画像に同期させ、前記第2カメラで光スペクトル画像を取得し、フレーム画像間で画像トラッキングを行い、時間的に連続する2つの光スペクトル画像に対応する2つのフレーム画像の画像マッチングを行い、該画像マッチングで得られた条件で前記2つの光スペクトル画像を合成し、前記フレーム画像の画像マッチングと光スペクトル画像の合成とを順次繰返し、前記静止飛行状態で取得した全ての光スペクトル画像を合成する請求項6の画像取得装置。
【請求項8】
飛行体と、該飛行体に設けられたGPS装置と、前記飛行体の飛行を制御する制御装置と、該飛行体に搭載され、時系列に連続するフレーム画像で構成される動画像を取得する第1カメラと、前記第1カメラと既知の関係に設けられ、測定対象の光スペクトル画像を取得する第2カメラと、撮像制御装置とを具備し、前記飛行体は第1地点から第2地点に移動し、前記GPS装置は、第1地点、第2地点の地心座標系の位置を測定し、前記第1カメラは第1地点の静止画像を取得すると共に第1地点から第2地点に移動中に動画像を取得し、更に第2地点の静止画像を取得し、前記第2カメラは第1地点から第2地点の移動途中に所定波長領域の光スペクトル画像を複数取得し、前記撮像制御装置は、第1地点の静止画像から複数の特徴点を抽出し、第1地点から第2地点に移動中の動画像により、動画像トラッキングを行い第2地点の静止画像に前記特徴点を特定し、該特徴点に基づき第1地点の静止画像と第2地点の静止画像とをステレオマッチングすると共に前記第1地点及び第2地点の地心座標系の位置に基づき3次元モデルを形成し、又前記撮像制御装置は、複数の光スペクトル画像を合成して光スペクトル合成画像を作成し、前記3次元モデルと前記光スペクトル合成画像とを合成し、前記測定対象の3次元位置データと光スペクトル情報を有する4次元モデルを作成することを特徴とする画像取得装置。
【請求項9】
前記撮像制御装置は、前記動画像のフレーム画像に同期させ、前記第2カメラで光スペクトル画像を取得し、フレーム画像間で画像トラッキングを行い、時間的に連続する2つの光スペクトル画像に対応する2つのフレーム画像の画像マッチングを行い、該画像マッチングで得られた条件で前記2つの光スペクトル画像を合成し、前記フレーム画像の画像マッチングと光スペクトル画像の合成とを順次繰返し、前記移動途中に取得した全ての光スペクトル画像を合成する請求項8の画像取得装置。
【請求項1】
時系列に連続するフレーム画像で構成される動画像を取得する第1カメラと、該第1カメラと既知の関係にあり、測定対象の光スペクトル画像を複数取得する第2カメラと、撮像制御装置とを具備し、該撮像制御装置は、1つの前記フレーム画像から複数の特徴点を抽出し、該特徴点を時系列に連続するフレーム画像中に順次特定し、前記複数の光スペクトル画像と対応するフレーム画像について前記特徴点に基づきフレーム画像間の画像マッチングを行い、該画像マッチングで得られた条件に基づき前記複数の光スペクトル画像を合成する様構成したことを特徴とする画像取得装置。
【請求項2】
前記フレーム画像と前記光スペクトル画像とが同期して取得され、各フレーム画像の特徴点のフレーム画像上の位置に基づいて各光スペクトル画像の相対的な位置合わせを行う請求項1の画像取得装置。
【請求項3】
前記第1カメラの動画像の第1フレーム画像から少なくとも5点の特徴点が抽出され、該少なくとも5点の特徴点が画像トラッキングにより第nフレーム画像中に特定され、両画像の特徴点に基づきステレオマッチングが行われ、前記測定対象の3次元モデルを形成する請求項1の画像取得装置。
【請求項4】
前記3次元モデルに前記合成した光スペクトル画像の波長成分の情報を重合する請求項3の画像取得装置。
【請求項5】
前記第2カメラが取得する光スペクトル画像は、所定の波長領域に関する2次元画像として取得される請求項1の画像取得装置。
【請求項6】
飛行体と、該飛行体に設けられたGPS装置と、該飛行体の飛行を制御する制御装置と、該飛行体に搭載され、時系列に連続するフレーム画像で構成される動画像を取得する第1カメラと、該第1カメラと既知の関係に設けられ、測定対象の光スペクトル画像を取得する第2カメラと、撮像制御装置とを具備し、前記飛行体は第1地点で静止飛行を行い、静止飛行後第2地点に移動し、該第2地点で静止飛行を行い、前記GPS装置は、第1地点、第2地点の地心座標系の位置を測定し、前記第1カメラは第1地点の静止画像を取得すると共に第1地点から第2地点に移動中に動画像を取得し、更に第2地点の静止画像を取得し、前記第2カメラは第1地点の静止飛行中に所定波長領域の光スペクトル画像を複数取得すると共に第2地点の静止飛行中に所定波長領域の光スペクトル画像を複数取得し、前記撮像制御装置は、第1地点の静止画像から複数の特徴点を抽出し、第1地点から第2地点に移動中の動画像により、動画像トラッキングを行い第2地点の静止画像に前記特徴点を特定し、特徴点に基づき第1地点の静止画像と第2地点の静止画像とをステレオマッチングすると共に前記第1地点及び第2地点の地心座標系の位置に基づき3次元モデルを形成し、又前記撮像制御装置は、第1地点の複数の光スペクトル画像を合成して第1光スペクトル合成画像を作成し、又第2地点の複数の光スペクトル画像を合成して第2光スペクトル合成画像を作成し、第1光スペクトル合成画像、第2光スペクトル合成画像の少なくとも一方と、前記3次元モデルとを合成し、前記測定対象の3次元位置データと光スペクトル情報を有する4次元モデルを作成することを特徴とする画像取得装置。
【請求項7】
前記第1カメラは前記静止飛行状態で同位置動画像を取得し、前記撮像制御装置は、前記同位置動画像のフレーム画像に同期させ、前記第2カメラで光スペクトル画像を取得し、フレーム画像間で画像トラッキングを行い、時間的に連続する2つの光スペクトル画像に対応する2つのフレーム画像の画像マッチングを行い、該画像マッチングで得られた条件で前記2つの光スペクトル画像を合成し、前記フレーム画像の画像マッチングと光スペクトル画像の合成とを順次繰返し、前記静止飛行状態で取得した全ての光スペクトル画像を合成する請求項6の画像取得装置。
【請求項8】
飛行体と、該飛行体に設けられたGPS装置と、前記飛行体の飛行を制御する制御装置と、該飛行体に搭載され、時系列に連続するフレーム画像で構成される動画像を取得する第1カメラと、前記第1カメラと既知の関係に設けられ、測定対象の光スペクトル画像を取得する第2カメラと、撮像制御装置とを具備し、前記飛行体は第1地点から第2地点に移動し、前記GPS装置は、第1地点、第2地点の地心座標系の位置を測定し、前記第1カメラは第1地点の静止画像を取得すると共に第1地点から第2地点に移動中に動画像を取得し、更に第2地点の静止画像を取得し、前記第2カメラは第1地点から第2地点の移動途中に所定波長領域の光スペクトル画像を複数取得し、前記撮像制御装置は、第1地点の静止画像から複数の特徴点を抽出し、第1地点から第2地点に移動中の動画像により、動画像トラッキングを行い第2地点の静止画像に前記特徴点を特定し、該特徴点に基づき第1地点の静止画像と第2地点の静止画像とをステレオマッチングすると共に前記第1地点及び第2地点の地心座標系の位置に基づき3次元モデルを形成し、又前記撮像制御装置は、複数の光スペクトル画像を合成して光スペクトル合成画像を作成し、前記3次元モデルと前記光スペクトル合成画像とを合成し、前記測定対象の3次元位置データと光スペクトル情報を有する4次元モデルを作成することを特徴とする画像取得装置。
【請求項9】
前記撮像制御装置は、前記動画像のフレーム画像に同期させ、前記第2カメラで光スペクトル画像を取得し、フレーム画像間で画像トラッキングを行い、時間的に連続する2つの光スペクトル画像に対応する2つのフレーム画像の画像マッチングを行い、該画像マッチングで得られた条件で前記2つの光スペクトル画像を合成し、前記フレーム画像の画像マッチングと光スペクトル画像の合成とを順次繰返し、前記移動途中に取得した全ての光スペクトル画像を合成する請求項8の画像取得装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図13】
【図14】
【図15】
【図11】
【図12】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図13】
【図14】
【図15】
【図11】
【図12】
【公開番号】特開2013−72772(P2013−72772A)
【公開日】平成25年4月22日(2013.4.22)
【国際特許分類】
【出願番号】特願2011−212479(P2011−212479)
【出願日】平成23年9月28日(2011.9.28)
【出願人】(000220343)株式会社トプコン (904)
【Fターム(参考)】
【公開日】平成25年4月22日(2013.4.22)
【国際特許分類】
【出願日】平成23年9月28日(2011.9.28)
【出願人】(000220343)株式会社トプコン (904)
【Fターム(参考)】
[ Back to top ]