
画像合成装置、及びプログラム
【課題】予期せず明るさにムラのある画像を取得しても合成画像にその影響が出ないようにする。
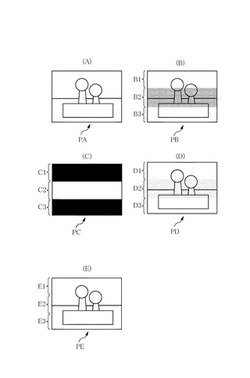
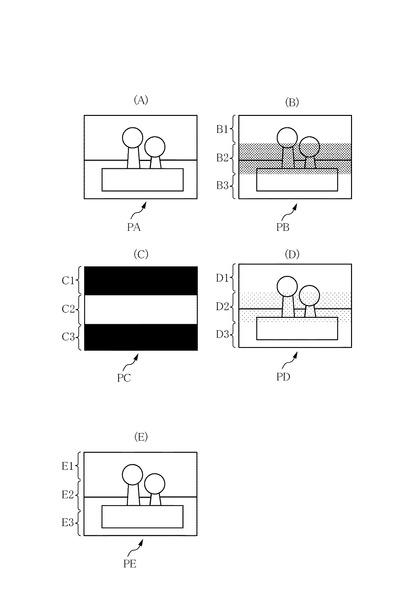
【解決手段】図3(C)に示す、予期せぬストロボフラッシュにより部分的に明るくされた連写画像PCの領域C2に関しては加算合成に採用せず、領域C1、C3は加算合成に採用して、連写された複数枚の画像をノイズ低減し加算合成する。これにより、連写された複数枚の画像において連写画像PCの領域C2は採用されていない「(3)ノイズ低減処理後の合成画像のYUV画像データ」が生成されることとなる。そして、生成した「(3)ノイズ低減処理後の合成画像のYUV画像データ」を用いて、動体判定マップMをαマップとして、
(2)ノイズ低減処理後の基準画像のYUV画像データ
(3)ノイズ低減処理後の合成画像のYUV画像データ
を合成する。これにより、図3(E)に示す領域E1,E2,E3が同一の明るさであり、明るさにムラのない合成画像PEを得ることができる。
【解決手段】図3(C)に示す、予期せぬストロボフラッシュにより部分的に明るくされた連写画像PCの領域C2に関しては加算合成に採用せず、領域C1、C3は加算合成に採用して、連写された複数枚の画像をノイズ低減し加算合成する。これにより、連写された複数枚の画像において連写画像PCの領域C2は採用されていない「(3)ノイズ低減処理後の合成画像のYUV画像データ」が生成されることとなる。そして、生成した「(3)ノイズ低減処理後の合成画像のYUV画像データ」を用いて、動体判定マップMをαマップとして、
(2)ノイズ低減処理後の基準画像のYUV画像データ
(3)ノイズ低減処理後の合成画像のYUV画像データ
を合成する。これにより、図3(E)に示す領域E1,E2,E3が同一の明るさであり、明るさにムラのない合成画像PEを得ることができる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、画像合成装置、及びプログラムに関する。
【背景技術】
【0002】
従来より、連写された画像を画素加算合成することにより、夜景等、光量の少ない撮影環境であっても、記録するのに十分な明るさを有する画像を生成する技術が知られている。
また、特許文献1に記載されるように、カメラをユーザが手に持って撮影する手持ち撮影の際、撮像画角のブレを補正し合成する画像合成技術も知られている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2006−148550号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、ローリングシャッター方式で画像信号を読み出す機能を有するカメラの場合、露光や読出しを行なっている期間に予期しないストロボフラッシュが炊かれ、これにより一時的な撮影環境上の明るさの変化があると、明るさにムラのある画像を取得してしまうことがある。
【0005】
そしてこのような画像を例えば連写及びこれによる加算合成に使用すると、明るさの変化を残したまま合成されるので結果的に明るさにムラの生じた合成画像が生成されることになる。
【0006】
本願発明はこのような問題点に鑑みて成されたものであり、予期せず明るさにムラのある画像を取得しても合成画像にその影響が出ないようにすることを目的とするものである。
【課題を解決するための手段】
【0007】
前記課題を解決するために本発明は、時間的に連続する複数の画像を取得する画像取得手段と、この画像取得手段によって取得された複数の画像から、合成の基準となる基準画像を選択する選択手段と、この選択手段によって選択された基準画像と前記画像取得手段によって取得された他の画像とを比較し、この比較の結果、差分の値が所定の閾値を越える画像を検出する検出手段と、この検出手段によって検出された画像に基づいて透過強度を設定する設定手段と、この設定手段によって設定された透過強度を用いて前記検出された画像を含む画像取得手段によって取得された複数の画像を加算合成して一つの画像を生成する画像生成手段とを備えることを特徴とする。
【発明の効果】
【0008】
本発明によれば、明るさにムラのある画像を取得しても合成画像にその影響が出ないようにすることができる。したがって、ローリングシャッター方式で画像信号を読み出す機能を有するカメラにおいて、連写の最中にストロボフラッシュ等による一時的な撮影環境上の明るさの変化があった場合でも、明るさにムラのない合成画像を得ることができる。
【図面の簡単な説明】
【0009】
【図1】本発明の一実施の形態を適用した撮像装置の回路ブロック図である。
【図2】同撮像装置における処理手順を示すフローチャートである。
【図3】同処理手順における画像例を示す図である。
【発明を実施するための形態】
【0010】
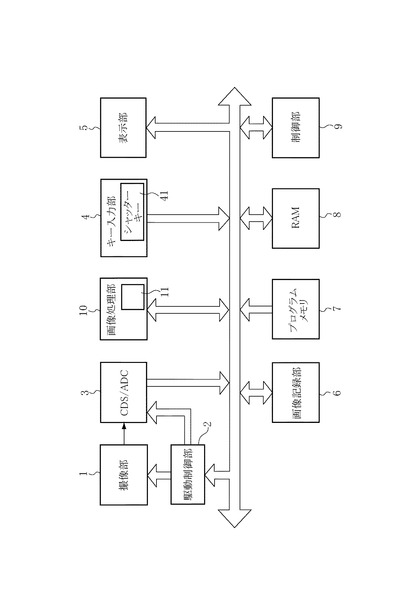
以下、本発明の一実施の形態を図に従って説明する。図1は、本発明の一実施の形態に係る画像処理装置を備える撮像装置の回路構成図である。この撮像装置は、ローリングシャッター方式で画像信号を読み出す機能を有するものであり、駆動制御部2、CDS/ADC3、キー入力部4、表示部5、画像記録部6、プログラムメモリ7、RAM8、制御部9、画像処理部10を有している。これらは、バスラインを介して接続されている。キー入力部4は撮影者の記録指示を検出するためのシャッターキー41を備え、画像処理部10は合成部11を備える。
【0011】
同図において撮像部1は、CMOS等のイメージセンサ、このイメージセンサ上に設けられたRGBのカラーフィルタ、及び、駆動制御部2からの制御により、光の強度を電荷の蓄積として一定時間保持し、CDS/ADC3にアナログの撮像信号としてこれらを出力するドライバを内蔵する。そして、シャッターキー41、制御部9、駆動制御部2を経由した撮影者の撮影指示を検出することで、複数の画像(カラー画像)を取得する。
【0012】
CDS/ADC3は、撮像部1から出力される被写体の光学像に応じたアナログの撮像信号が入力される回路であって、入力した撮像信号を保持するCDSと、その撮像信号を増幅するゲイン調整アンプ(AGC)、増幅された撮像信号をデジタルの撮像信号に変換するA/D変換器(ADC)等から構成される。なお、ゲイン調整アンプの調整に関わる制御についても、駆動制御部2からの指示に基づき行われる。このため、露光条件(シャッタースピード、若しくは絞り値)を同じくして複数枚の画像を取得しても、RGBのゲイン調整アンプや画像の色味を順次変えることによる条件の異なる複数の画像を生成することができる。
【0013】
尚、本実施の形態においては、駆動制御部2がゲイン調整アンプに関わる制御を行なうようにしたが、これに限らない。例えば上記の制御は制御部9で行なうようにしてもよい。
【0014】
キー入力部4は、上述のシャッターキー41の他、本発明に係る画像の取得・記録を目的とする撮影モードへの切り換え、表示の切り換え等を検出するための各種キーを備える。
【0015】
表示部5は、合成された画像を表示する機能を有する。画像記録部6は、本発明に係る合成処理が実行された後、JPEG方式で符号化された画像データ(画像ファイル)を記憶・格納する。プログラムメモリ7は、制御部9、画像処理部10にて実行されるプログラムを記憶し、このプログラムは必要に応じて制御部9が読み出す。RAM8は、各処理により発生する処理中のデータを一時的に保持する機能を有する。制御部9は、この撮像装置全体の処理動作を制御する。画像処理部10は、画像データの符号化/復号化処理の他、本発明の特徴的構成に対応する合成部11を備える。
【0016】
すなわち合成部11は、連写画像から選択された1枚の基準画像と、連写画像を加算合成した合成画像との合成を実行するとともに、この合成画像について後述する動体判定マップを差分領域に対応する透過強度マップ(αマップ)として用いて動体による残像を少なくさせるものである。
【0017】
次に、本実施の形態の動作について説明する。ユーザがキー入力部4に設けられているモードボタンを操作して、本実施形態に係る撮影モードを設定すると、制御部9がプログラムメモリ7からプログラムを読み出して、図2のフローチャートに示すように、処理を開始する。
【0018】
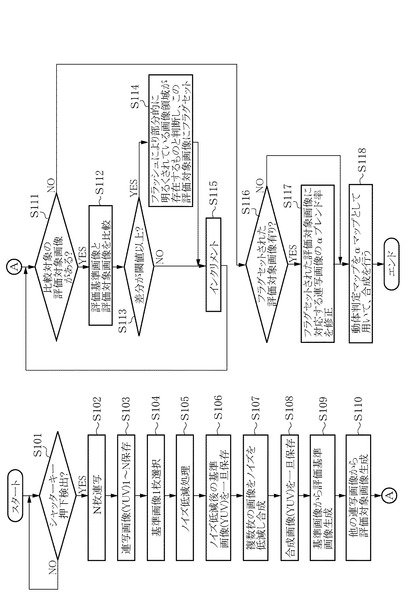
すなわち、制御部9はシャッターキー41の押下が検出されたか否かを判断する(ステップS101)。シャッターキー41の押下が検出されたならば、駆動制御部2に指示してN枚の連写を実行させる(ステップS102)。引き続き、連写により得られた画像データに基づき、輝度色差の色空間情報で表現されたYUV画像からなる連写画像を生成してRAM8に保存する(ステップS103)。
【0019】
したがって、連写枚数Nが例えば6枚であったとすると、YUV画像からなる6枚の連写画像P1〜P6がRAM8に保存される。なお、これら連写画像P1〜P6の連写に際しては、手ブレによる画像のブレは公知の技術(CCDシフトやレンズシフトによる画角補正技術)により補正されているものとする。
【0020】
次に、これら連写画像から基準画像を選択する(ステップS104)。この基準画像の選択に際しては、ユーザーによる外部操作に基づいて選択する。例えば、連写画像P1〜P6を表示部5に一覧表示させ、これら一覧表示された連写画像P1〜P6からユーザー操作により選択された画像を基準画像とする。本実施例においては連写画像P3を基準画像として選択したものと仮定する。
【0021】
しかる後に、この選択した基準画像の画像データをLPF(ローパスフィルタ)にて透過処理する等により、ノイズ低減処理する(ステップS105)。そして、このノイズ低減処理した基準画像のYUV画像データをRAM8に一旦保存する(ステップS106)。したがって、このステップS105及びステップS106での処理により、本例においては、連写画像P3の画像データがノイズ低減処理されて、そのYUV画像データがRAM8に保存されることとなる。
【0022】
また、連写された複数枚の画像に関しては、ノイズ低減し合成する(ステップS107)。つまり、複数枚の連写画像のYUV画像データを画素毎に加算平均すれば、ノイズ低減しつつ合成を行うことができる。複数枚Nの連写画像のYUV画像データ加算平均の式[1]〜[3]を下記に示す。尚、Y_result、 U_result、 及び、V_resultは、画素の輝度色差パラメータ夫々の合成後の情報を示すものである。
Y_result = (Y[0] + Y[1] + ・・・ + Y [N]) / N ・・・式[1]
U_result = (U[0] + U[1] + ・・・ + U [N]) / N ・・・式[2]
V_result = (V[0] + V[1] + ・・・ + V [N]) / N ・・・式[3]
【0023】
無論、複数枚の連写画像を用いたノイズ低減効果のある合成方法であれば、加算平均に限らず他の処理方法であってもよい。そして、このノイズ低減した全連写画像の合成画像のYUV画像データをRAM8に一旦保存する(ステップS108)。
【0024】
したがって、このステップS108の処理を終了した時点において、RAM8には下記の画像データが一旦保存されることとなる。
(1)各連写画像のYUV画像データ
(2)ノイズ低減処理後の基準画像のYUV画像データ
(3)ノイズ低減処理後の合成画像のYUV画像データ
【0025】
次に、前記ステップS104で選択した基準画像から評価基準画像を生成する(ステップS109)。ここで、評価基準画像とは、前記基準画像を例えば32×32画素に縮小した縮小画像である。次いで、前記ステップS104で選択した基準画像以外の他の連写画像から評価対象画像を生成する(ステップS110)。ここで、評価基準画像とは、前記基準画像を例えば32×32画素に縮小した縮小画像である。
【0026】
そして、次のステップS111からS115の処理で、前記評価基準画像と各連写画像との比較、評価を行う。その際に、先ず未だ比較、評価を行っていない評価対象画像(連写画像)があるか否かを判断する(ステップS111)。未だ比較、評価を行っていない評価対象画像(連写画像)があるならば、評価基準画像と、未だ比較、評価を行っていない評価対象画像とを比較する(ステップS112)。
【0027】
しかる比較の後に、評価対象画像と評価基準画像との差分が閾値以上であるか否かを判断する(ステップS113)。つまり、制御部9はノイズ低減処理後の評価基準画像のYUV画像データ(2)と、評価対象画像(縮小画像からなる各連写画像)のYUV画像データ(1)との差分絶対値を、下記式[4]〜[6]に示すように、各連写画像のYUV画像データ(1)の画素毎に求める。
つまり、以下の式において、
Y_Base_Nr, U_Base_Nr, V_Base_Nr :上記(2)のノイズ低減後基準画像デ ータのYUV各パラメータ
Y[n], U[n], V[n] :n枚目の画像データのYUV各パラメ ータ
N :合成枚数
fMax() :最大値算出関数
fLpf() :平滑化関数
fEmphasis() :マップ強調関数
とすると、
Diff_Y[n] = |Y_base_Nr −Y[n]| ・・・式[4] // Yの差分絶対値
Diff_U[n] = |U_base_Nr −U[n]| ・・・式[5] // Uの差分絶対値
Diff_V[n] = |V_base_Nr −V[n]| ・・・式[6] // Vの差分絶対値
を各連写画像の画素毎に求める。
【0028】
そして、前記差分絶対値が所定の閾値以上であるか否かを判断する。このステップS113での判断の結果、差分が閾値以上でない場合には、この評価対象画像は部分的に明るい画像領域のない画像と判断し、インクリメント処理を実行し(ステップS115)、次の評価対象画像に対してステップS112からの処理を繰り返す。また、ステップS113での判断の結果、差分が閾値以上である場合には、予期せぬタイミングで発光した、外部からのストロボフラッシュにより部分的に明るくされている画像領域が存在するものと判断し、この評価対象画像にフラグをセットする(ステップS114)。
【0029】
すなわち、前述のように本実施の形態に係る撮像装置は、ローリングシャッター方式で画像信号を読み出す機能を有するものである。したがって、連写の最中に一時的な撮影環境上の明るさの変化があると、図3(A)に示す明るさにムラのない画像のみならず、同図(B)に示す明るさにムラのある画像を取得してしまうことがある。同図(B)の画像は、予期せぬタイミングで発光した外部からのストロボフラッシュにより領域B2の明るさのみが領域B1、B3よりも部分的に明るい画像である。したがって、図3(A)の画像を比較基準画像PAとし、同図(B)の画像を比較対象画像PBとすると、ステップS112の判断がYESとなって、比較対象画像PBにフラグがセットされることとなる。
【0030】
このようにして、ステップS111からステップS115の処理が連写枚数分繰り返されると、比較対象の評価対象画像が無くなりステップS111の判断がNOとなる。したがって、制御部9はステップS111からS116に処理を進めて、前記ステップS114の処理が実行されてフラグがセットされた評価対象画像(連写画像)が有ったか否かを判断する。フラグセットされた評価対象画像がない場合には、ステップS117の処理を実行することなく、ステップS118に処理を進めて、動体判定マップをαマップとして用いて、合成を行う。
【0031】
すなわち、前記式[4]〜[6]において、差分が大きいほど、部分的に明るい画像領域であるといえるから、下記式[7]に示すように差分が最大のもの(連写画像の対応する画素毎に差分が最大のもの)を選択する。
Diff[n] = fMax(Diff_Y[n], Diff_U[n], Diff_V[n]) ・・・式[7]
【0032】
次に、下記式[8]で示すように、基準画像を除く各連写画像の最大差分を平均化する処理を実行する。
Ave_Diff = (Diff[0] + Diff[1] + ・・・ + Diff[N]) / N-1 ・・・式[8]
【0033】
更に、下記式[9]で示すように、平滑化処理を実行する。
Ave_Diff_Lpf = fLpf(Ave_Diff) ・・・式[9]
この平滑化処理により、動体判定マップMが生成されることとなる。この動体判定マップMは、α=0であって全透過させる領域と、α=255であって不透過とで構成される。
【0034】
引き続き、下記式[10]で示すように、強調処理を行って前記動体判定マップMのコントラストをアップさせる。
Map_Move = fEmphasis (Ave_Diff_Lpf) ・・・式[10]
この強調処理により、動体判定マップMにおいて動体の像が重なる領域のコントラストがアップされる。
【0035】
そして、最終的にこの動体判定マップM((Map_ Move [0 ~ 255]: 0=動体なし)をαマップとして用いて、前述した
(2)ノイズ低減処理後の基準画像のYUV画像データ
(3)ノイズ低減処理後の合成画像のYUV画像データ
を合成する(ステップS118)。
合成された各画素のYUVの各パラメータ(Y_result,U_result,V_result)は下記式[11]〜[13]で表現される。
Y_result = (Y_Nr_Mix ×(255−Map_Move) + Y_Base_Nr × Map_ Move) / 255
・・・式[11]
U_result = (U_Nr_Mix ×(255−Map_Move) + U _Base_Nr × Map_ Move) / 255
・・・式[12]
V_result = (V_Nr_Mix ×(255−Map_Move) + V _Base_Nr × Map_ Move) / 255
・・・式[13]
これにより、合成画像を表すYUV画像データが生成されることとなる。
【0036】
しかし、ステップS116での判断の結果、フラグセットされた評価対象画像があった場合には、フラグセットされた評価対象画像に対応する連写画像のαブレンド率を修正し(ステップS117)、しかる後に前述のステップS118の処理を実行する。
【0037】
すなわち、図3(B)に示した比較対象画像PBにあっては、予期せぬタイミングで発光した外部からのストロボフラッシュにより領域B2の明るさのみが領域B1、B3よりも部分的に明るい画像であり、前記ステップS114の処理でフラグセットされる。したがって、フラグセットされた比較対象画像PBがあることになり、ステップS116からステップS117に進み、評価対象画像PBに対応する連写画像のαブレンド率を修正する(ステップS117)。
【0038】
つまり、図3(C)に示す画像が評価対象画像PBに対応する連写画像PCであるとすると、この連写画像PCは、前記評価対象画像PBの領域B2に対応する領域C2のみが、予期せぬタイミングで発光した外部からのストロボフラッシュにより、領域B1及びB3に対応するC1及びC2よりも部分的に明るい。一方、前述したようにステップS107での処理により、連写された複数枚(N枚)の画像がノイズ低減処理されて合成され、ステップS108での処理により、このノイズ低減処理された全連写画像の合成画像のYUV画像データがRAM8に保存されている。
【0039】
したがって、このノイズ低減処理された全連写画像の合成画像((3)ノイズ低減処理後の合成画像のYUV画像データ)には、領域C2のみがフラッシュの影響により明るい連写画像PCが合成されている。したがって、この合成画像をそのまま用いて、動体判定マップMをαマップとして、
(2)ノイズ低減処理後の基準画像のYUV画像データ
(3)ノイズ低減処理後の合成画像のYUV画像データ
を合成すると、「(3)ノイズ低減処理後の合成画像のYUV画像データ」に領域C2の明るさ成分が含まれているので、図3(D)に示すように、連写画像PCの領域C2に対応する領域D2のみが、領域C1及びC3に対応するD1及びD2よりも部分的に明るい合成画像PDが生成されてしまう。
【0040】
そこで、本実施の形態においてはステップS117において、フラグセットされた評価対象画像に対応する連写画像のαブレンド率を修正する。より具体的には、連写画像PCの領域C2に関しては採用せず、領域C1、C3は採用して、ステップS107と同様の処理を実行し、連写された複数枚の画像をノイズ低減し合成する。これにより、連写された複数枚の画像において連写画像PCの領域C2は採用されていない「(3)ノイズ低減処理後の合成画像のYUV画像データ」が生成されることとなる。
【0041】
そして、ステップS117の処理で新たに生成した「(3)ノイズ低減処理後の合成画像のYUV画像データ」を用いて、ステップS118で動体判定マップMをαマップとして、
(2)ノイズ低減処理後の基準画像のYUV画像データ
(3)ノイズ低減処理後の合成画像のYUV画像データ
を合成する。
【0042】
このとき、ステップS118での合成に用いられる「(3)ノイズ低減処理後の合成画像のYUV画像データ」には、連写画像PCの領域C2に対応する成分は含まれていない。このため、図3(E)に示すように、領域E1,E2,E3が同一の明るさであり、明るさにムラのない合成画像PEを得ることができる。
【0043】
しかも、前述のように、本実施の形態においては平滑化処理を行うことから、合成による動体と背景との境界線をより自然なものにすることができる。また、マップMのコントラストを上げる処理を実行したことから、合成処理における被写体ブレの残像(ゴースト)を減少させることもできる。
【0044】
なお、本実施の形態においては、YUV画像データを用いた場合を示したが、RGB画像データを用いるようにしてもよい。この場合、RGBそれぞれについて、同様に差分二乗を算出する。
【0045】
以上、この発明の実施形態について説明したが、この発明はこれらに限定されるものではなく、特許請求の範囲に記載された発明とその均等の範囲を含むものである。
【0046】
以下に、本出願の特許請求の範囲に記載された発明を付記する。
【0047】
<請求項1>
時間的に連続する複数の画像を取得する画像取得手段と、
この画像取得手段によって取得された複数の画像から、合成の基準となる基準画像を選択する選択手段と、
この選択手段によって選択された基準画像と前記画像取得手段によって取得された他の画像とを比較し、この比較の結果、差分の値が所定の閾値を越える画像を検出する検出手段と、
この検出手段によって検出された画像に基づいて透過強度を設定する設定手段と、
この設定手段によって設定された透過強度を用いて前記検出された画像を含む画像取得手段によって取得された複数の画像を加算合成して一つの画像を生成する画像生成手段と、
を備えることを特徴とする画像合成装置。
【0048】
<請求項2>
前記検出手段は、前記選択された基準画像における画素の平均値と前記画像取得手段によって取得された他の画像における画素の平均値とを比較することを特徴とする請求項1記載の画像合成装置。
【0049】
<請求項3>
前記画像取得手段は、撮像手段を含むことを特徴とする請求項1又は2記載の画像合成装置。
【0050】
<請求項4>
前記設定手段は、前記撮像手段が画像信号を撮り込んだ瞬間の光の照射具合と前記撮像手段が撮り込む画像信号のタイミングに基づいて発生する明暗差に基づいて、透過強度を設定することを特徴とする請求項3記載の画像合成装置。
【0051】
<請求項5>
装置が有するコンピュータを、
時間的に連続する複数の画像を取得する画像取得手段、
この画像取得手段によって取得された複数の画像から、合成の基準となる基準画像を選択する選択手段、
この選択手段によって選択された基準画像と前記画像取得手段によって取得された他の画像とを比較し、この比較の結果、差分の値が所定の閾値を越える画像を検出する検出手段、
この検出手段によって検出された画像に基づいて透過強度を設定する設定手段、
この設定手段によって設定された透過強度を用いて前記検出された画像を含む画像取得手段によって取得された複数の画像を加算合成して一つの画像を生成する画像生成手段、
として機能させることを特徴とするプログラム。
【符号の説明】
【0052】
1 撮像部
2 駆動制御部
3 CDS/ADC
4 キー入力部
5 表示部
6 画像記録部
7 プログラムメモリ
8 RAM
9 制御部
10 画像処理部
11 合成部
41 シャッターキー
【技術分野】
【0001】
本発明は、画像合成装置、及びプログラムに関する。
【背景技術】
【0002】
従来より、連写された画像を画素加算合成することにより、夜景等、光量の少ない撮影環境であっても、記録するのに十分な明るさを有する画像を生成する技術が知られている。
また、特許文献1に記載されるように、カメラをユーザが手に持って撮影する手持ち撮影の際、撮像画角のブレを補正し合成する画像合成技術も知られている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2006−148550号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、ローリングシャッター方式で画像信号を読み出す機能を有するカメラの場合、露光や読出しを行なっている期間に予期しないストロボフラッシュが炊かれ、これにより一時的な撮影環境上の明るさの変化があると、明るさにムラのある画像を取得してしまうことがある。
【0005】
そしてこのような画像を例えば連写及びこれによる加算合成に使用すると、明るさの変化を残したまま合成されるので結果的に明るさにムラの生じた合成画像が生成されることになる。
【0006】
本願発明はこのような問題点に鑑みて成されたものであり、予期せず明るさにムラのある画像を取得しても合成画像にその影響が出ないようにすることを目的とするものである。
【課題を解決するための手段】
【0007】
前記課題を解決するために本発明は、時間的に連続する複数の画像を取得する画像取得手段と、この画像取得手段によって取得された複数の画像から、合成の基準となる基準画像を選択する選択手段と、この選択手段によって選択された基準画像と前記画像取得手段によって取得された他の画像とを比較し、この比較の結果、差分の値が所定の閾値を越える画像を検出する検出手段と、この検出手段によって検出された画像に基づいて透過強度を設定する設定手段と、この設定手段によって設定された透過強度を用いて前記検出された画像を含む画像取得手段によって取得された複数の画像を加算合成して一つの画像を生成する画像生成手段とを備えることを特徴とする。
【発明の効果】
【0008】
本発明によれば、明るさにムラのある画像を取得しても合成画像にその影響が出ないようにすることができる。したがって、ローリングシャッター方式で画像信号を読み出す機能を有するカメラにおいて、連写の最中にストロボフラッシュ等による一時的な撮影環境上の明るさの変化があった場合でも、明るさにムラのない合成画像を得ることができる。
【図面の簡単な説明】
【0009】
【図1】本発明の一実施の形態を適用した撮像装置の回路ブロック図である。
【図2】同撮像装置における処理手順を示すフローチャートである。
【図3】同処理手順における画像例を示す図である。
【発明を実施するための形態】
【0010】
以下、本発明の一実施の形態を図に従って説明する。図1は、本発明の一実施の形態に係る画像処理装置を備える撮像装置の回路構成図である。この撮像装置は、ローリングシャッター方式で画像信号を読み出す機能を有するものであり、駆動制御部2、CDS/ADC3、キー入力部4、表示部5、画像記録部6、プログラムメモリ7、RAM8、制御部9、画像処理部10を有している。これらは、バスラインを介して接続されている。キー入力部4は撮影者の記録指示を検出するためのシャッターキー41を備え、画像処理部10は合成部11を備える。
【0011】
同図において撮像部1は、CMOS等のイメージセンサ、このイメージセンサ上に設けられたRGBのカラーフィルタ、及び、駆動制御部2からの制御により、光の強度を電荷の蓄積として一定時間保持し、CDS/ADC3にアナログの撮像信号としてこれらを出力するドライバを内蔵する。そして、シャッターキー41、制御部9、駆動制御部2を経由した撮影者の撮影指示を検出することで、複数の画像(カラー画像)を取得する。
【0012】
CDS/ADC3は、撮像部1から出力される被写体の光学像に応じたアナログの撮像信号が入力される回路であって、入力した撮像信号を保持するCDSと、その撮像信号を増幅するゲイン調整アンプ(AGC)、増幅された撮像信号をデジタルの撮像信号に変換するA/D変換器(ADC)等から構成される。なお、ゲイン調整アンプの調整に関わる制御についても、駆動制御部2からの指示に基づき行われる。このため、露光条件(シャッタースピード、若しくは絞り値)を同じくして複数枚の画像を取得しても、RGBのゲイン調整アンプや画像の色味を順次変えることによる条件の異なる複数の画像を生成することができる。
【0013】
尚、本実施の形態においては、駆動制御部2がゲイン調整アンプに関わる制御を行なうようにしたが、これに限らない。例えば上記の制御は制御部9で行なうようにしてもよい。
【0014】
キー入力部4は、上述のシャッターキー41の他、本発明に係る画像の取得・記録を目的とする撮影モードへの切り換え、表示の切り換え等を検出するための各種キーを備える。
【0015】
表示部5は、合成された画像を表示する機能を有する。画像記録部6は、本発明に係る合成処理が実行された後、JPEG方式で符号化された画像データ(画像ファイル)を記憶・格納する。プログラムメモリ7は、制御部9、画像処理部10にて実行されるプログラムを記憶し、このプログラムは必要に応じて制御部9が読み出す。RAM8は、各処理により発生する処理中のデータを一時的に保持する機能を有する。制御部9は、この撮像装置全体の処理動作を制御する。画像処理部10は、画像データの符号化/復号化処理の他、本発明の特徴的構成に対応する合成部11を備える。
【0016】
すなわち合成部11は、連写画像から選択された1枚の基準画像と、連写画像を加算合成した合成画像との合成を実行するとともに、この合成画像について後述する動体判定マップを差分領域に対応する透過強度マップ(αマップ)として用いて動体による残像を少なくさせるものである。
【0017】
次に、本実施の形態の動作について説明する。ユーザがキー入力部4に設けられているモードボタンを操作して、本実施形態に係る撮影モードを設定すると、制御部9がプログラムメモリ7からプログラムを読み出して、図2のフローチャートに示すように、処理を開始する。
【0018】
すなわち、制御部9はシャッターキー41の押下が検出されたか否かを判断する(ステップS101)。シャッターキー41の押下が検出されたならば、駆動制御部2に指示してN枚の連写を実行させる(ステップS102)。引き続き、連写により得られた画像データに基づき、輝度色差の色空間情報で表現されたYUV画像からなる連写画像を生成してRAM8に保存する(ステップS103)。
【0019】
したがって、連写枚数Nが例えば6枚であったとすると、YUV画像からなる6枚の連写画像P1〜P6がRAM8に保存される。なお、これら連写画像P1〜P6の連写に際しては、手ブレによる画像のブレは公知の技術(CCDシフトやレンズシフトによる画角補正技術)により補正されているものとする。
【0020】
次に、これら連写画像から基準画像を選択する(ステップS104)。この基準画像の選択に際しては、ユーザーによる外部操作に基づいて選択する。例えば、連写画像P1〜P6を表示部5に一覧表示させ、これら一覧表示された連写画像P1〜P6からユーザー操作により選択された画像を基準画像とする。本実施例においては連写画像P3を基準画像として選択したものと仮定する。
【0021】
しかる後に、この選択した基準画像の画像データをLPF(ローパスフィルタ)にて透過処理する等により、ノイズ低減処理する(ステップS105)。そして、このノイズ低減処理した基準画像のYUV画像データをRAM8に一旦保存する(ステップS106)。したがって、このステップS105及びステップS106での処理により、本例においては、連写画像P3の画像データがノイズ低減処理されて、そのYUV画像データがRAM8に保存されることとなる。
【0022】
また、連写された複数枚の画像に関しては、ノイズ低減し合成する(ステップS107)。つまり、複数枚の連写画像のYUV画像データを画素毎に加算平均すれば、ノイズ低減しつつ合成を行うことができる。複数枚Nの連写画像のYUV画像データ加算平均の式[1]〜[3]を下記に示す。尚、Y_result、 U_result、 及び、V_resultは、画素の輝度色差パラメータ夫々の合成後の情報を示すものである。
Y_result = (Y[0] + Y[1] + ・・・ + Y [N]) / N ・・・式[1]
U_result = (U[0] + U[1] + ・・・ + U [N]) / N ・・・式[2]
V_result = (V[0] + V[1] + ・・・ + V [N]) / N ・・・式[3]
【0023】
無論、複数枚の連写画像を用いたノイズ低減効果のある合成方法であれば、加算平均に限らず他の処理方法であってもよい。そして、このノイズ低減した全連写画像の合成画像のYUV画像データをRAM8に一旦保存する(ステップS108)。
【0024】
したがって、このステップS108の処理を終了した時点において、RAM8には下記の画像データが一旦保存されることとなる。
(1)各連写画像のYUV画像データ
(2)ノイズ低減処理後の基準画像のYUV画像データ
(3)ノイズ低減処理後の合成画像のYUV画像データ
【0025】
次に、前記ステップS104で選択した基準画像から評価基準画像を生成する(ステップS109)。ここで、評価基準画像とは、前記基準画像を例えば32×32画素に縮小した縮小画像である。次いで、前記ステップS104で選択した基準画像以外の他の連写画像から評価対象画像を生成する(ステップS110)。ここで、評価基準画像とは、前記基準画像を例えば32×32画素に縮小した縮小画像である。
【0026】
そして、次のステップS111からS115の処理で、前記評価基準画像と各連写画像との比較、評価を行う。その際に、先ず未だ比較、評価を行っていない評価対象画像(連写画像)があるか否かを判断する(ステップS111)。未だ比較、評価を行っていない評価対象画像(連写画像)があるならば、評価基準画像と、未だ比較、評価を行っていない評価対象画像とを比較する(ステップS112)。
【0027】
しかる比較の後に、評価対象画像と評価基準画像との差分が閾値以上であるか否かを判断する(ステップS113)。つまり、制御部9はノイズ低減処理後の評価基準画像のYUV画像データ(2)と、評価対象画像(縮小画像からなる各連写画像)のYUV画像データ(1)との差分絶対値を、下記式[4]〜[6]に示すように、各連写画像のYUV画像データ(1)の画素毎に求める。
つまり、以下の式において、
Y_Base_Nr, U_Base_Nr, V_Base_Nr :上記(2)のノイズ低減後基準画像デ ータのYUV各パラメータ
Y[n], U[n], V[n] :n枚目の画像データのYUV各パラメ ータ
N :合成枚数
fMax() :最大値算出関数
fLpf() :平滑化関数
fEmphasis() :マップ強調関数
とすると、
Diff_Y[n] = |Y_base_Nr −Y[n]| ・・・式[4] // Yの差分絶対値
Diff_U[n] = |U_base_Nr −U[n]| ・・・式[5] // Uの差分絶対値
Diff_V[n] = |V_base_Nr −V[n]| ・・・式[6] // Vの差分絶対値
を各連写画像の画素毎に求める。
【0028】
そして、前記差分絶対値が所定の閾値以上であるか否かを判断する。このステップS113での判断の結果、差分が閾値以上でない場合には、この評価対象画像は部分的に明るい画像領域のない画像と判断し、インクリメント処理を実行し(ステップS115)、次の評価対象画像に対してステップS112からの処理を繰り返す。また、ステップS113での判断の結果、差分が閾値以上である場合には、予期せぬタイミングで発光した、外部からのストロボフラッシュにより部分的に明るくされている画像領域が存在するものと判断し、この評価対象画像にフラグをセットする(ステップS114)。
【0029】
すなわち、前述のように本実施の形態に係る撮像装置は、ローリングシャッター方式で画像信号を読み出す機能を有するものである。したがって、連写の最中に一時的な撮影環境上の明るさの変化があると、図3(A)に示す明るさにムラのない画像のみならず、同図(B)に示す明るさにムラのある画像を取得してしまうことがある。同図(B)の画像は、予期せぬタイミングで発光した外部からのストロボフラッシュにより領域B2の明るさのみが領域B1、B3よりも部分的に明るい画像である。したがって、図3(A)の画像を比較基準画像PAとし、同図(B)の画像を比較対象画像PBとすると、ステップS112の判断がYESとなって、比較対象画像PBにフラグがセットされることとなる。
【0030】
このようにして、ステップS111からステップS115の処理が連写枚数分繰り返されると、比較対象の評価対象画像が無くなりステップS111の判断がNOとなる。したがって、制御部9はステップS111からS116に処理を進めて、前記ステップS114の処理が実行されてフラグがセットされた評価対象画像(連写画像)が有ったか否かを判断する。フラグセットされた評価対象画像がない場合には、ステップS117の処理を実行することなく、ステップS118に処理を進めて、動体判定マップをαマップとして用いて、合成を行う。
【0031】
すなわち、前記式[4]〜[6]において、差分が大きいほど、部分的に明るい画像領域であるといえるから、下記式[7]に示すように差分が最大のもの(連写画像の対応する画素毎に差分が最大のもの)を選択する。
Diff[n] = fMax(Diff_Y[n], Diff_U[n], Diff_V[n]) ・・・式[7]
【0032】
次に、下記式[8]で示すように、基準画像を除く各連写画像の最大差分を平均化する処理を実行する。
Ave_Diff = (Diff[0] + Diff[1] + ・・・ + Diff[N]) / N-1 ・・・式[8]
【0033】
更に、下記式[9]で示すように、平滑化処理を実行する。
Ave_Diff_Lpf = fLpf(Ave_Diff) ・・・式[9]
この平滑化処理により、動体判定マップMが生成されることとなる。この動体判定マップMは、α=0であって全透過させる領域と、α=255であって不透過とで構成される。
【0034】
引き続き、下記式[10]で示すように、強調処理を行って前記動体判定マップMのコントラストをアップさせる。
Map_Move = fEmphasis (Ave_Diff_Lpf) ・・・式[10]
この強調処理により、動体判定マップMにおいて動体の像が重なる領域のコントラストがアップされる。
【0035】
そして、最終的にこの動体判定マップM((Map_ Move [0 ~ 255]: 0=動体なし)をαマップとして用いて、前述した
(2)ノイズ低減処理後の基準画像のYUV画像データ
(3)ノイズ低減処理後の合成画像のYUV画像データ
を合成する(ステップS118)。
合成された各画素のYUVの各パラメータ(Y_result,U_result,V_result)は下記式[11]〜[13]で表現される。
Y_result = (Y_Nr_Mix ×(255−Map_Move) + Y_Base_Nr × Map_ Move) / 255
・・・式[11]
U_result = (U_Nr_Mix ×(255−Map_Move) + U _Base_Nr × Map_ Move) / 255
・・・式[12]
V_result = (V_Nr_Mix ×(255−Map_Move) + V _Base_Nr × Map_ Move) / 255
・・・式[13]
これにより、合成画像を表すYUV画像データが生成されることとなる。
【0036】
しかし、ステップS116での判断の結果、フラグセットされた評価対象画像があった場合には、フラグセットされた評価対象画像に対応する連写画像のαブレンド率を修正し(ステップS117)、しかる後に前述のステップS118の処理を実行する。
【0037】
すなわち、図3(B)に示した比較対象画像PBにあっては、予期せぬタイミングで発光した外部からのストロボフラッシュにより領域B2の明るさのみが領域B1、B3よりも部分的に明るい画像であり、前記ステップS114の処理でフラグセットされる。したがって、フラグセットされた比較対象画像PBがあることになり、ステップS116からステップS117に進み、評価対象画像PBに対応する連写画像のαブレンド率を修正する(ステップS117)。
【0038】
つまり、図3(C)に示す画像が評価対象画像PBに対応する連写画像PCであるとすると、この連写画像PCは、前記評価対象画像PBの領域B2に対応する領域C2のみが、予期せぬタイミングで発光した外部からのストロボフラッシュにより、領域B1及びB3に対応するC1及びC2よりも部分的に明るい。一方、前述したようにステップS107での処理により、連写された複数枚(N枚)の画像がノイズ低減処理されて合成され、ステップS108での処理により、このノイズ低減処理された全連写画像の合成画像のYUV画像データがRAM8に保存されている。
【0039】
したがって、このノイズ低減処理された全連写画像の合成画像((3)ノイズ低減処理後の合成画像のYUV画像データ)には、領域C2のみがフラッシュの影響により明るい連写画像PCが合成されている。したがって、この合成画像をそのまま用いて、動体判定マップMをαマップとして、
(2)ノイズ低減処理後の基準画像のYUV画像データ
(3)ノイズ低減処理後の合成画像のYUV画像データ
を合成すると、「(3)ノイズ低減処理後の合成画像のYUV画像データ」に領域C2の明るさ成分が含まれているので、図3(D)に示すように、連写画像PCの領域C2に対応する領域D2のみが、領域C1及びC3に対応するD1及びD2よりも部分的に明るい合成画像PDが生成されてしまう。
【0040】
そこで、本実施の形態においてはステップS117において、フラグセットされた評価対象画像に対応する連写画像のαブレンド率を修正する。より具体的には、連写画像PCの領域C2に関しては採用せず、領域C1、C3は採用して、ステップS107と同様の処理を実行し、連写された複数枚の画像をノイズ低減し合成する。これにより、連写された複数枚の画像において連写画像PCの領域C2は採用されていない「(3)ノイズ低減処理後の合成画像のYUV画像データ」が生成されることとなる。
【0041】
そして、ステップS117の処理で新たに生成した「(3)ノイズ低減処理後の合成画像のYUV画像データ」を用いて、ステップS118で動体判定マップMをαマップとして、
(2)ノイズ低減処理後の基準画像のYUV画像データ
(3)ノイズ低減処理後の合成画像のYUV画像データ
を合成する。
【0042】
このとき、ステップS118での合成に用いられる「(3)ノイズ低減処理後の合成画像のYUV画像データ」には、連写画像PCの領域C2に対応する成分は含まれていない。このため、図3(E)に示すように、領域E1,E2,E3が同一の明るさであり、明るさにムラのない合成画像PEを得ることができる。
【0043】
しかも、前述のように、本実施の形態においては平滑化処理を行うことから、合成による動体と背景との境界線をより自然なものにすることができる。また、マップMのコントラストを上げる処理を実行したことから、合成処理における被写体ブレの残像(ゴースト)を減少させることもできる。
【0044】
なお、本実施の形態においては、YUV画像データを用いた場合を示したが、RGB画像データを用いるようにしてもよい。この場合、RGBそれぞれについて、同様に差分二乗を算出する。
【0045】
以上、この発明の実施形態について説明したが、この発明はこれらに限定されるものではなく、特許請求の範囲に記載された発明とその均等の範囲を含むものである。
【0046】
以下に、本出願の特許請求の範囲に記載された発明を付記する。
【0047】
<請求項1>
時間的に連続する複数の画像を取得する画像取得手段と、
この画像取得手段によって取得された複数の画像から、合成の基準となる基準画像を選択する選択手段と、
この選択手段によって選択された基準画像と前記画像取得手段によって取得された他の画像とを比較し、この比較の結果、差分の値が所定の閾値を越える画像を検出する検出手段と、
この検出手段によって検出された画像に基づいて透過強度を設定する設定手段と、
この設定手段によって設定された透過強度を用いて前記検出された画像を含む画像取得手段によって取得された複数の画像を加算合成して一つの画像を生成する画像生成手段と、
を備えることを特徴とする画像合成装置。
【0048】
<請求項2>
前記検出手段は、前記選択された基準画像における画素の平均値と前記画像取得手段によって取得された他の画像における画素の平均値とを比較することを特徴とする請求項1記載の画像合成装置。
【0049】
<請求項3>
前記画像取得手段は、撮像手段を含むことを特徴とする請求項1又は2記載の画像合成装置。
【0050】
<請求項4>
前記設定手段は、前記撮像手段が画像信号を撮り込んだ瞬間の光の照射具合と前記撮像手段が撮り込む画像信号のタイミングに基づいて発生する明暗差に基づいて、透過強度を設定することを特徴とする請求項3記載の画像合成装置。
【0051】
<請求項5>
装置が有するコンピュータを、
時間的に連続する複数の画像を取得する画像取得手段、
この画像取得手段によって取得された複数の画像から、合成の基準となる基準画像を選択する選択手段、
この選択手段によって選択された基準画像と前記画像取得手段によって取得された他の画像とを比較し、この比較の結果、差分の値が所定の閾値を越える画像を検出する検出手段、
この検出手段によって検出された画像に基づいて透過強度を設定する設定手段、
この設定手段によって設定された透過強度を用いて前記検出された画像を含む画像取得手段によって取得された複数の画像を加算合成して一つの画像を生成する画像生成手段、
として機能させることを特徴とするプログラム。
【符号の説明】
【0052】
1 撮像部
2 駆動制御部
3 CDS/ADC
4 キー入力部
5 表示部
6 画像記録部
7 プログラムメモリ
8 RAM
9 制御部
10 画像処理部
11 合成部
41 シャッターキー
【特許請求の範囲】
【請求項1】
時間的に連続する複数の画像を取得する画像取得手段と、
この画像取得手段によって取得された複数の画像から、合成の基準となる基準画像を選択する選択手段と、
この選択手段によって選択された基準画像と前記画像取得手段によって取得された他の画像とを比較し、この比較の結果、差分の値が所定の閾値を越える画像を検出する検出手段と、
この検出手段によって検出された画像に基づいて透過強度を設定する設定手段と、
この設定手段によって設定された透過強度を用いて前記検出された画像を含む画像取得手段によって取得された複数の画像を加算合成して一つの画像を生成する画像生成手段と、
を備えることを特徴とする画像合成装置。
【請求項2】
前記検出手段は、前記選択された基準画像における画素の平均値と前記画像取得手段によって取得された他の画像における画素の平均値とを比較することを特徴とする請求項1記載の画像合成装置。
【請求項3】
前記画像取得手段は、撮像手段を含むことを特徴とする請求項1又は2記載の画像合成装置。
【請求項4】
前記設定手段は、前記撮像手段が画像信号を撮り込んだ瞬間の光の照射具合と前記撮像手段が撮り込む画像信号のタイミングに基づいて発生する明暗差に基づいて、透過強度を設定することを特徴とする請求項3記載の画像合成装置。
【請求項5】
装置が有するコンピュータを、
時間的に連続する複数の画像を取得する画像取得手段、
この画像取得手段によって取得された複数の画像から、合成の基準となる基準画像を選択する選択手段、
この選択手段によって選択された基準画像と前記画像取得手段によって取得された他の画像とを比較し、この比較の結果、差分の値が所定の閾値を越える画像を検出する検出手段、
この検出手段によって検出された画像に基づいて、透過強度を設定する設定手段、
この設定手段によって設定された透過強度を用いて前記検出された画像を含む画像取得手段によって取得された複数の画像を加算合成して一つの画像を生成する画像生成手段、
として機能させることを特徴とするプログラム。
【請求項1】
時間的に連続する複数の画像を取得する画像取得手段と、
この画像取得手段によって取得された複数の画像から、合成の基準となる基準画像を選択する選択手段と、
この選択手段によって選択された基準画像と前記画像取得手段によって取得された他の画像とを比較し、この比較の結果、差分の値が所定の閾値を越える画像を検出する検出手段と、
この検出手段によって検出された画像に基づいて透過強度を設定する設定手段と、
この設定手段によって設定された透過強度を用いて前記検出された画像を含む画像取得手段によって取得された複数の画像を加算合成して一つの画像を生成する画像生成手段と、
を備えることを特徴とする画像合成装置。
【請求項2】
前記検出手段は、前記選択された基準画像における画素の平均値と前記画像取得手段によって取得された他の画像における画素の平均値とを比較することを特徴とする請求項1記載の画像合成装置。
【請求項3】
前記画像取得手段は、撮像手段を含むことを特徴とする請求項1又は2記載の画像合成装置。
【請求項4】
前記設定手段は、前記撮像手段が画像信号を撮り込んだ瞬間の光の照射具合と前記撮像手段が撮り込む画像信号のタイミングに基づいて発生する明暗差に基づいて、透過強度を設定することを特徴とする請求項3記載の画像合成装置。
【請求項5】
装置が有するコンピュータを、
時間的に連続する複数の画像を取得する画像取得手段、
この画像取得手段によって取得された複数の画像から、合成の基準となる基準画像を選択する選択手段、
この選択手段によって選択された基準画像と前記画像取得手段によって取得された他の画像とを比較し、この比較の結果、差分の値が所定の閾値を越える画像を検出する検出手段、
この検出手段によって検出された画像に基づいて、透過強度を設定する設定手段、
この設定手段によって設定された透過強度を用いて前記検出された画像を含む画像取得手段によって取得された複数の画像を加算合成して一つの画像を生成する画像生成手段、
として機能させることを特徴とするプログラム。
【図1】


【図2】
【図3】
【図2】
【図3】
【公開番号】特開2013−106169(P2013−106169A)
【公開日】平成25年5月30日(2013.5.30)
【国際特許分類】
【出願番号】特願2011−248251(P2011−248251)
【出願日】平成23年11月14日(2011.11.14)
【出願人】(000001443)カシオ計算機株式会社 (8,748)
【Fターム(参考)】
【公開日】平成25年5月30日(2013.5.30)
【国際特許分類】
【出願日】平成23年11月14日(2011.11.14)
【出願人】(000001443)カシオ計算機株式会社 (8,748)
【Fターム(参考)】
[ Back to top ]