
画像形成システムを用いて対象領域の三次元モデルを生成するための方法及び装置
【課題】画像形成システムを用いて対象領域の三次元モデルを生成するための方法及び装置を提供する。
【解決手段】本発明は、x線画像形成システムにおいて、ターゲット・オブジェクト上の対象領域の三次元表現を生成する方法を提供する。本方法は、既知の幾何学的形状の基準マーカーを使用する。対象領域及び基準マーカーが、複数の所定位置において画像形成される。各々の所定位置についての基準マーカーの予測される画像を計算し、各々の所定位置における基準マーカーのキャプチャされた画像と比較する。予測される画像とキャプチャされた画像との間の相違を用いて、各々の所定位置についての対象領域の修正された画像を生成し、これらの修正された画像を用いて、対象領域の三次元モデルを生成する。本方法は、高価な機械的位置決めシステムを必要とすることなく、x線画像形成システムにおける対象領域の有用な三次元モデルを生成することを可能にする。
【解決手段】本発明は、x線画像形成システムにおいて、ターゲット・オブジェクト上の対象領域の三次元表現を生成する方法を提供する。本方法は、既知の幾何学的形状の基準マーカーを使用する。対象領域及び基準マーカーが、複数の所定位置において画像形成される。各々の所定位置についての基準マーカーの予測される画像を計算し、各々の所定位置における基準マーカーのキャプチャされた画像と比較する。予測される画像とキャプチャされた画像との間の相違を用いて、各々の所定位置についての対象領域の修正された画像を生成し、これらの修正された画像を用いて、対象領域の三次元モデルを生成する。本方法は、高価な機械的位置決めシステムを必要とすることなく、x線画像形成システムにおける対象領域の有用な三次元モデルを生成することを可能にする。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、複数の二次元画像を用いて、ターゲット・オブジェクトの対象領域(region of interest)の三次元モデルを生成するように構成された画像形成システム(imaging system)に関する。より具体的には、本発明は、安価な画像形成機器を使用して高品質な三次元モデルを得ることを可能にするように、既知の幾何学的形状の基準マーカーを使用するX線画像形成システムに関する。
【背景技術】
【0002】
欠陥の存在を確認するため又は欠陥の原因を判定するために、回路部品及びその実装を検査する必要がある。プリント回路基板の上の集積回路部品及びその実装の内部構造を検査するための1つの周知の技術は、X線画像形成である。X線源からのX線は、回路基板上の対象領域を透過し、その結果として得られるX線画像、即ち投影が、回路基板上のX線源とは反対側にあるX線検出器により検出される。これにより、対象領域を透過する二次元画像即ちスライスが生成される。X線源は、対象領域を透過するのに十分なエネルギーをもったX線を生成すると同時に、結果として得られる画像内に著しいコントラストを生成するのに十分なほど低いエネルギーも有している。
【0003】
この二次元画像形成技術は有効であるが、不十分な情報を提供することが多い。例えば、対象領域を通る所望の視野を遮るオブジェクトが存在することがあり、又は、単に、対象領域が十分に複雑であり三次元で調べることを必要とすることがある。対象領域は、部品の全体若しくはほんの一部であってもよく、又は幾つかの部品であってもよい。
【0004】
対象領域の三次元モデルは、トモシンセシス(tomosynthesis)を用いて、対象領域を通る異なる視点又は投影から撮られる多数の二次元画像を結合することによって得ることができる。結果として得られる三次元モデルにより、ユーザが、対象領域を通るあらゆる面を検査し、三次元画像を調べてボイドなどの欠陥を見つけ出すことが可能になる。しかしながら、トモシンセシスから良好な結果を得るためには、X線源、対象領域、及び検出器の相対位置及び配向を高精度で知る必要がある。使用される数式において必要とされるため、トモシンセシスにおいて二次元画像を結合する方法は、この幾何学的情報に依存している。その結果、既存のトモシンセシス・システムは、システムの要素、即ちX線源、対象領域、及び検出器を互いに対して移動させるための高精度の機械的システムを必要とする。このように高精度の機械設備を必要とすることから、トモシンセシスのx線画像形成システムは、二次元のx線画像形成システムよりも遥かに高価なものになっている。
【発明の概要】
【発明が解決しようとする課題】
【0005】
対象領域の有用なトモシンセシス・モデルを提供することができる比較的安価な画像形成システムを提供することが望ましい。
【課題を解決するための手段】
【0006】
本発明の第1の態様において、例えばトモシンセシス・システムにおいて、ターゲット・オブジェクトの対象領域の三次元表現を生成する方法が提供される。本方法は、
a)ターゲット・オブジェクトの対象領域において、又は対象領域に対して固定された可動表面上に、既知の幾何学的形状の基準マーカーを特定するステップと、
b)対象領域及び基準マーカーが放射線源に対して第1の位置にあり、検出器が放射線源に対して第1の検出位置にあるときに、検出器により放射線源からの放射線を検出することにより、基準マーカーの第1の画像及び対象領域の第1の画像を作成するステップと、
c)基準マーカー及び対象領域を、放射線源に対して第2の位置に移動させ、検出器を放射線源に対する第2の検出位置に移動させるステップと、
d)対象領域及び基準マーカーが放射線源に対して第2の位置にあり、検出器が放射線源に対して第2の検出位置にあるときに、検出器により放射線源からの放射線を検出することにより、基準マーカーの第2の画像及び対象領域の第2の画像を作成するステップと、
e)基準マーカーの第2の画像と基準マーカーの予測される第2の画像に関する情報との比較を用いて、対象領域についての修正された第2の画像データを生成するステップと、
f)第1の画像又は修正された第1の画像データ、及び対象領域に関する修正された第2の画像データを用いて、対象領域の三次元表現を生成するステップと、
を含む。
【0007】
第1の態様による方法は、画像処理中に位置の不正確さを修正することによって、比較的正確ではない、従って安価な位置決め機構を使用することを可能にする。典型的には、放射線源は固定されており、ターゲット・オブジェクト及び検出器は、放射線源に対する所定位置を通って移動する。本発明の第1の態様による方法は、ターゲット・オブジェクトの対象領域上又はその付近の既知の幾何学的形状の基準マーカーを用いて、対象領域及び基準マーカーのキャプチャされた画像を調整し、放射線源に対する検出器及び対象領域の位置決めにおける不正確さを補償する。この方法では、対象領域及び基準マーカーの両方が所定位置を通って移動される。各々の所定位置における放射線源、対象領域(及び基準マーカー)、及び検出器の間の意図される空間関係は既知である。基準マーカーの幾何学的形状は既知である(又は、既知であると推定される)。この情報を基準マーカーの既知の又は測定された初期位置と併せて使用し、基準マーカー及び検出器の所定位置の各々について、基準マーカーの予測される画像を計算することができる。
【0008】
次いで、画像変換を計算し、各々の所定位置において、基準マーカーのキャプチャされた画像を基準マーカーの予測される画像にマッピングすることができる。この画像変換を後で用いて、所定位置の各々についてのキャプチャされた対象領域の画像を変換し、各々の所定位置についての対象領域の対応する修正された画像を生成することができる。事実上、画像は、画像形成システムの要素に対して、それらが各々の所定位置において理想的な空間関係にあった場合に撮られたであろう画像に対応するように変換される。
【0009】
次いで、各々の所定位置についてのこれらの修正された画像をトモシンセシス技術により結合して、対象領域の3Dモデル又は画像を作成する。
【0010】
このように、本方法は、良好な品質の三次元画像を生成するために、他の場合には十分に正確な機械的位置決め部品をもたない既存のx線画像形成機械と共に、トモシンセシス技術を用いることを可能にする。従来のトモシンセシス・システムにおいては、検出器及びターゲット・オブジェクトの位置が、検出器上のピクセルの何分の1、典型的にはミクロンの何分の1かの範囲内まで正確に知られる必要がある。このことは、移動機構内の機械部品の全てを、非常に厳しい公差の範囲内に非常に正確に機械加工することを必要とする。これがトモシンセシス機械のコストの主要な要因である。本発明においてはこうした厳しい公差は必要とされず、従って、本方法は、ユーザに著しいコスト削減を提供する。
【0011】
本方法は、対象領域内に既に存在する特徴を基準マーカーとして特定することを含むことができる。例えば、対象領域内のはんだボール又ははんだボールのアレイを基準マーカーとして選択することができる。各々のはんだボールは回転対称であると推定することができ、そのサイズ(ボールのアレイが用いられる場合はその空間関係)を第1の画像内に定めることができる。この情報を用いると、放射線源、対象領域、及び検出器が異なる所定位置にある状態で、キャプチャされた対象領域の投影内で、基準マーカーがどのように見えるかを計算することは容易である。基準マーカーは、適切なユーザ・インターフェースを用いて、スクリーン上でユーザにより選択することができる。ユーザ・インターフェースは、ユーザが、例えばカーソルを用いて基準マーカーの周囲にボックスを描くことを可能にする、例えば、マウス、ジョイスティック、キーボード、又はタッチ・センシティブ・スクリーンを含むことができる。
【0012】
代替的に又は付加的に、本方法は、対象領域内、又はターゲット・オブジェクト上若しくは、ターゲット・オブジェクトのための支持部上の対象領域に近接して、基準マーカーを配置するステップを含むことができる。例えば、回路基板の対象領域内で、はんだボール又は他のマーカーを回路基板の上に取り付けることができる。代替的に、例えば対象領域が部品で密に覆われている場合には、基準マーカーを、対象領域の外ではあるがターゲット・オブジェクト又は支持部上に配置することができる。次いで、画像キャプチャ方法は、放射線源、対象領域、及び検出器が第1の位置にあるとき、即ち第1の空間関係を有するとき、対象領域の画像をキャプチャし、次いで、検出器を固定状態にしながらターゲット・オブジェクトのための支持部を移動させて、基準マーカーが対象領域の場所に来るようにし、その結果、放射線源、基準マーカー、及び検出器が第1の空間関係を有するようにするステップを含むことができる。この対象領域及び基準マーカーの一方の画像をキャプチャし、続いて対象領域及び基準マーカーの他方の画像をキャプチャするプロセスは、各々の対象領域、基準マーカー、及び検出器の所定位置について繰り返される。次いで、基準マーカーが対象領域内にある場合と同様に、基準マーカー及び対象領域の画像を使用して、修正された画像データを提供することができる。このことは、著しいエラーをもたらすことなく可能であり、それは、検出器及びターゲット・オブジェクトのための支持部の移動は、サーボ・モータなどのこれらの部品に対して安価な移動機構を使用するときでさえ、必ずしも非常に正確であるとは限らないが、典型的には一貫した方法で繰り返すことができるためである。
【0013】
また、取り付けられた基準マーカーを含むように、既にターゲット・オブジェクト上に存在するが対象領域の外部に位置する、この目的のために設けられた基準マーカーを使用すること、又はさらに支持部のために設けられた基準マーカーを使用することも可能である。例えば、回路基板の製造者にとって、製造中に各々の回路基板上の所定位置に基準マーカーを含ませることが望ましいことがある。基準マーカーを、回路基板上の比較的空いた位置に有利に配置することができる。この場合、基準マーカーが対象領域の外部にある場合、本方法は、対象領域、基準マーカー、及び検出器の所定位置の各々について、対象領域及び基準マーカーの一方の画像をキャプチャし、続いて対象領域及び基準マーカーの他方の画像をキャプチャするステップを含む。
【0014】
本方法は、例えば、対象領域及び基準マーカーが放射線源に対して第3の位置にあり、検出器が放射線源に対して第3の位置にあるときに、検出器により放射線源からの放射を検出することによって、基準マーカーの第3の画像及び対象領域の第3の画像を作成するステップなど、対象領域、基準マーカー、及び検出器の後の所定位置に対して修正された画像データを作成するステップ、及び、基準マーカーの第3の画像と基準マーカーの予測される第3の画像に関する情報との比較を用いて、対象領域に関する修正された第3の画像データを生成するステップをさらに含むことができ、対象領域の三次元表現を生成するステップは、修正された第3の画像データを用いる。
【0015】
本方法は、多数の異なる位置から対象領域及び基準マーカーの画像を生成するステップ、及び、各々の位置について、対象領域に関する対応する修正された画像データを生成するステップを有利に含むことができる。対象領域、基準マーカー、及び検出器に関する所定位置の数が多いほど、対象領域の三次元表現内に、より多くの情報を含ませることができる。
【0016】
基準マーカーは、複数の基準マーカー要素を含むことができる。例えば、基準マーカーは、2つ、3つ、又はそれ以上のはんだボールを含むことができる。基準マーカー要素は、対象領域の全体にわたって離間配置することができる。画像全体にわたる、又は画像全体に典型的なエラーを示す画像領域からの情報を与えるように配置された基準マーカーのアレイは、回転、縮尺、台形歪みの修正、又はより高次の変換のための情報を提供することができる。対象領域の内部に配置された単一の基準マーカーが、やむを得ず、対象領域内の他の部品により覆い隠されることもある。それにより、基準の検出、及び後の画像の変換が不正確になる可能性がある。しかしながら、基準マーカーのアレイを有することで精度が向上し、検出がずっとロバストなものとなる。全ての基準が同時に他の部品により覆い隠される可能性は極めて低い。正確な検出のためには、一度に少なくとも1つの閉塞されない基準を有することで十分である。
【0017】
基準マーカーは、所定の非対称な形状を有することができる。例えば、基準マーカーは1つのアームが欠けた星の形態をとることができる。非対称な形状は、高度に対称的な基準マーカーと比べて、絶対的な位置指標を与えることによる回転のエラー及び支持部又は検出器のピッチ又は傾斜に起因する歪みについて、より多くの情報を提供することができる。このような独特の形状はまた、各々の画像において明確に認識することができるという利点をも有し得る。
【0018】
しかしながら、処理を簡単にするために、はんだボールのような球状のマーカーを使用することができる。次いで、基準マーカー又は各々の基準マーカー要素が回転対称を有するという推定に基づいて、基準マーカーの予測される第2の画像を計算することができる。これにより、必要とされる画像処理が簡略化される。
【0019】
本発明の第2の態様において、ターゲット・オブジェクト上の対象領域の三次元表現を生成するシステムであって、
x線源と、
ターゲット・オブジェクト及び既知の幾何学的形状の基準マーカーを支持するように構成された支持部、及び、支持部を移動させるように構成された支持部搬送機構と、
x線検出器、及び検出器を移動させるように構成された検出器搬送機構と、
支持部搬送機構及び検出器搬送機構に接続されたモーション・コントローラと、
を含み、モーション・コントローラは、コマンド信号を支持部搬送機構に与えて対象領域及び基準マーカーを第1の位置から第2の位置に移動させ、かつ、コマンド信号を検出器搬送機構に与えて検出器を第1の検出位置から第2の検出位置に移動させるように構成され、対象領域及び基準マーカーが第1の位置にあり、検出器が第1の検出位置にあるとき、及び、対象領域及び基準マーカーが第2の位置にあり、検出器が第2の検出位置にあるとき、x線源からのx線が対象領域及び基準マーカーを通って検出器に伝送され、
検出器から信号を受信し、対象領域及び基準マーカーの画像を生成するように構成された、検出器に結合された画像プロセッサが設けられ、画像プロセッサは、
第2の位置における基準マーカーの予測される画像を計算し、
第2の位置における基準マーカーの予測される画像と、基準マーカーの第2の画像との比較を用いて、対象領域の修正された第2の画像を生成し、
対象領域の第1の画像、又は対象領域の第1の画像についての修正された画像データ、及び対象領域の修正された第2の画像を用いて、対象領域の三次元表現を生成する、
ように構成されるシステムを提供する。
【0020】
本システムは、検出器からの信号に基づいて画像データを表示するように構成された視覚ディスプレイと、ユーザ・インターフェースとをさらに含み、ユーザ・インターフェースは、ユーザがディスプレイ上の画像内から基準マーカーを選択することを可能にするように構成される。
【0021】
検出器搬送機構は、検出器が結合されるピボット運動可能な弓状の軌道を含むことができる。支持部搬送機構は、支持部が、3つの直交方向に独立して移動するのを可能にするように構成することができる。画像プロセッサは、本発明の第1の態様の方法ステップのいずれかを実行するように構成することができる。
【0022】
本発明の第3の態様において、コンピュータ可読ストレージ媒体が提供され、これにより、ユーザがx線画像形成装置を用いて本発明の方法を実施することが可能になる。このx線画像形成装置は、x線源と、対象領域及び既知の幾何学的形状の基準マーカーのための支持部を移動させる支持部搬送機構と、x線検出器と、検出器を移動させるように構成された検出器搬送機構と、支持部搬送機構及び検出器搬送機構に接続されたモーション・コントローラとを含み、モーション・コントローラは、コマンド信号を支持部搬送機構に与えて対象領域及び基準マーカーを第1の位置から第2の位置へ移動させ、かつ、コマンド信号を検出器搬送機構に与えて検出器を第1の検出位置から第2の検出位置に移動させるように構成され、対象領域及び基準マーカーが第1の位置にあり、検出器が第1の検出位置にあるとき、及び、対象領域及び基準マーカーが第2の位置にあり、検出器が第2の検出位置にあるとき、x線源からのx線が対象領域及び基準マーカーを通って検出器に伝送される。この装置が与えられると、コンピュータ可読ストレージ媒体は、x線画像形成装置に接続されたコンピュータ・プロセッサによって実行されるときに、コンピュータ・プロセッサに、
対象領域及び基準マーカーを選択するようにユーザに要求し、
受信した画像データに基づいて、第1及び第2の位置における対象領域及び基準マーカーの画像を生成させ、
第2の位置における基準マーカーの予測される画像を生成させ、
第2の位置における基準マーカーの予測される画像と、第2の位置における基準マーカーの画像との比較を用いて、第2の位置における対象領域についての修正された画像データを生成させ、
第1の位置における対象領域の画像、又は第1の位置における対象領域についての修正された画像データ、及び第2の位置における対象領域についての修正された画像データを用いて、対象領域の三次元表現を生成させる、
実行可能命令を格納する。
【0023】
コンピュータ可読ストレージ媒体はまた、x線画像形成装置に接続されたコンピュータ・プロセッサによって実行されたときに、モーション・コントローラの動作を制御する、実行可能命令を保持することもできる。コンピュータ可読ストレージ媒体はまた、x線画像形成装置に接続されたコンピュータ・プロセッサにより実行されたときに本発明の第1の態様の方法ステップのいずれかを実行する、実行可能命令を保持することもできる。
【0024】
本発明は、基準マーカーが、対象領域と共に移動されるときに対象領域に対して定位置を保持するように、対象領域に対して定位置に取り付けることができる1つ又はそれ以上の基準マーカーと組み合わせた、第3の態様に従ったコンピュータ可読ストレージ媒体を提供する。
【0025】
ここで本発明の実施形態が、一例として添付の図面を参照して詳細に説明される。
【図面の簡単な説明】
【0026】
【図1】X線画像形成システム上の部品を示す概略図である。
【図2A】本発明の一実施形態による支持部ステージ、x線源、及び検出器の等角図である。
【図2B】本発明の一実施形態による支持部ステージ、x線源、及び検出器の等角図である。
【図2C】本発明の一実施形態による支持部ステージ、x線源、及び検出器の等角図である。
【図3】本発明の一実施形態による画像形成システムの要素を示す概略図である。
【図4】検出器の視野及び基準マーカーの視野を示す。
【図5】(a)〜(e)は幾つかの例示的な基準マーカーを示す。
【図6】本発明の1つの実施形態による方法を示す流れ図である。
【図7】本発明の別の実施形態による、図6に示される方法に対する変更を示す流れ図である。
【発明を実施するための形態】
【0027】
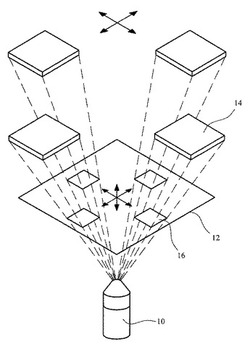
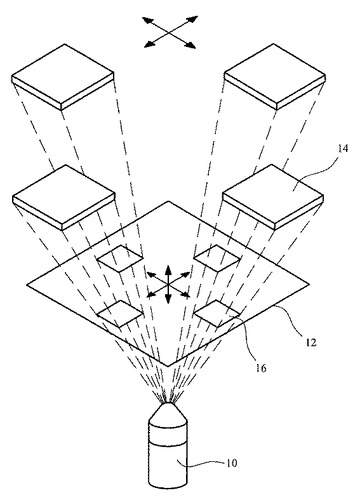
図1は、x線画像形成システムの基本要素の概略図である。図1に示されるシステムは、このシステムにおいては固定状態で保持されるx線源10と、可動支持部12と、可動検出器14とを含む。x線源は比較的かさばる大型部品なので、x線源を固定状態で保持することは有利である。システムはまた、比較的柔軟性がなく移動させるのが困難な、非常に大電力のケーブルを必要とする。x線源10からのx線は、支持部、及び支持部上に取り付けられたいずれかのターゲット・オブジェクトを透過し、検出器14上に衝突する。図1は、検出器14の視野に対応する支持部上の領域16を図示する。検出器の視野は、ユーザにより、ターゲット・オブジェクトの対象領域が検出器の視野内に入るように、検出器14、支持部12、及びx線源10の相対的位置決めによって選択される。検出器は、異なる位置に移動することができ、支持部上の物体を透過する異なる投影を取ることができる。この文脈において、異なる投影とは、x線が支持部上の物体を異なる方向に透過することを意味する。検出器14は、典型的には、支持部12の上方のXY面内の連続した位置に移動され、一連の異なる投影を同じ倍率で収集する。検出器を移動させるための例示的な機構が図2に示されるが、いずれの適切な機構を用いることもできる。
【0028】
支持部12は、支持部上の対象領域をx線源と検出器の間の位置に移動させることができるように、XY面内を移動可能である。図1に示される例においては、支持部12はまた、垂直方向即ちZ方向にも移動可能である。これにより、検出器において検出される画像の倍率を調整することが可能になり、即ち、x線源と支持部、及び、x線源と検出器の間の相対距離に応じて、支持部のより広い又は狭い領域が検出器の視野に入るようにすることができる。説明されたように、対象領域は視野内に入っていなければならない。生成される三次元モデルの品質は視野の縁部においてより低くなるので、視野は、対象領域よりやや大きいことが好ましい。これは、画像が完全に互いに重なり合うわけではなく、従って、三次元モデルの縁部は中央領域より少ない画像から生成されるからである。しかし、最高の解像度を提供するために、ユーザは、対象領域全体の良質な三次元モデルを可能にする最小の視野を選択すべきである。
【0029】
図1において、検出器14は4つの異なる位置で示され、支持部上に対応する4つの領域16が存在する。さらに多くの位置が可能であることを理解すべきである。三次元モデルは、いかなる数の投影からも構築することができ、実際には、12個から720個までの間の投影のいずれも用いられる。
【0030】
一般に、x線源10は、電子銃からの電子を加速し、エネルギー電子を金属のターゲットと衝突させることにより、x線のビームを生成する管を含む。1つの実施形態において、x線源は、1つより多い位置において金属ターゲットにぶつかるように電子ビームを移動させる能力を欠く固定型、即ち非可動型のx線源とすることができる。ビームに含まれているx線は、支持部12上のターゲット・オブジェクトの厚さを貫通するのに十分なエネルギーをもっているので、減衰したx線が検出器14に達する。対象領域内の異なる密度の材料によるx線の減衰のレベル差が、検出器によりキャプチャされる結果として得られる画像におけるコントラストをもたらす。
【0031】
支持部12上に取り付けることができる典型的なターゲット・オブジェクトは、電子部品、集積回路、及び部品と回路素子との間のボンドを含むプリント回路基板である。常に複数の回路基板が基材上に取り付けられ得るが、単一の可動検出器により、常に単一の対象領域だけが検出器の視野内に画像形成される。
【0032】
図1に示される検出器14は、デジタル検出器14とすることができ、当技術分野において周知の構成を有することができる。一般に、検出器はアクティブ領域と、アクティブ領域の上の入ってくるx線を測定又は画像形成することができる別の信号タイプに変換するセンサと、信号の振幅を高めるのに使用される増幅器とを含む。信号は、検出器14内でアナログ形式からデジタル形式に変換され、フォーマットされたデジタル画像が検出器から出力される。例示的なデジタル検出器は、アクティブ領域を構成するシリコン・フォトダイオードの二次元ピクセル・アレイを含む相補型金属酸化膜半導体(CMOS)のフラット・パネル型検出器のような、デジタル電荷結合素子(CCD)カメラである。1つの実施形態において、検出器は、3メガピクセルの150mm×120mmのアクティブ領域によって特徴付けられるフラット・パネル型検出器である。検出器14のアクティブ領域が支持部上の対象領域及びx線源に面しており、対象領域及び検出器が適切に位置決めされている場合には、対象領域を透過するX線は検出器14上に衝突する。
【0033】
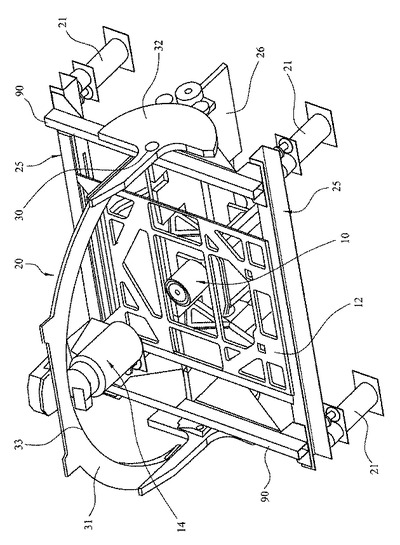
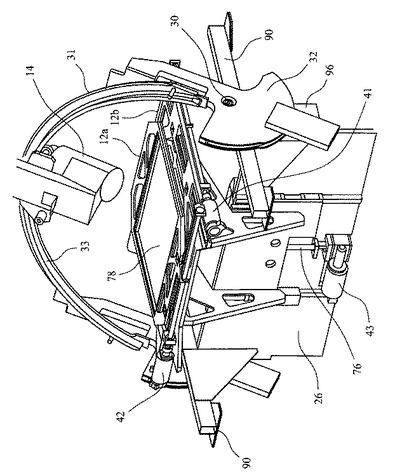
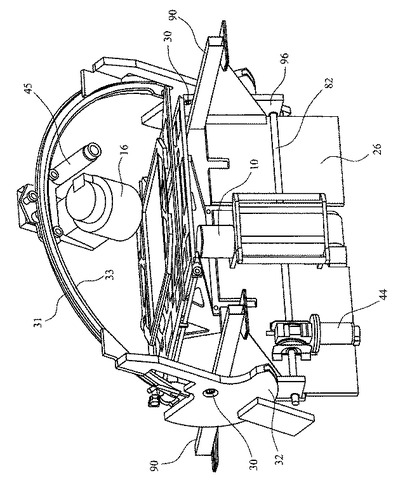
図2A−図2Cは、本発明と併せて使用することができる、支持部ステージ、X線源、及び検出器を有するx線装置の一例を示す。装置は、脚部21上に支持されるフレーム20を含み、脚部21自体はキャビネット内に取り付けられる(図示せず)。このキャビネットは通常の種類のものであり、x線の悪影響からユーザを保護するための遮蔽エンクロージャを提供する。x線を生成するためのx線管10及び検出器14が、フレーム20上に取り付けられる。画像形成される対象領域を有するターゲット・オブジェクトを支持するように適合された、後で詳細に説明される可動支持部12が、x線源と検出器との間にある。
【0034】
脚部21の各対は、フレーム20のそれぞれのビーム25を支持する。図2B及び図2Cにおいては、他の部品をより明瞭に示すために、脚部21及びビーム25が取り除かれていることに留意されたい。クロスビーム90はビーム25上に載っている。ビーム25及びクロスビーム90は、ほぼ矩形の周囲フレームを含む。フレーム20はまた、ビーム90にほぼ垂直面で取り付けられた主支持プレート26も含む。支持プレート26は比較的大型かつ剛性であり、フレーム20の主要な構造的要素を含む。
【0035】
x線管10は、支持プレート26の一方の側に直接取り付けられる。管10は、脚部21に対して中央に配置され、従って、プレート26は一方の側に僅かにオフセットされる。支持プレート26の他方の側には、対象領域を含むターゲット・オブジェクトがその上に固定された可動支持部12を垂直方向に位置決めすることができるz軸モータ43が、直接取り付けられる。
【0036】
図2Bに最も良く示されるように、可動支持部12は、Xテーブル12bの上部に取り付けられたYテーブル12aから成る。Y軸モータ42がYテーブル12aをY方向に移動させ、X軸モータ41がYテーブル12a及びXテーブル12bの両方をX方向に移動させる。Z軸モータ43は、シャフト76を垂直方向に往復運動させる。シャフト76はXテーブル12bに接続され、Xテーブル12b及びYテーブル12aを垂直方向に移動させる。
【0037】
支持プレート26の外側端は剛性のチーク96を有し、この上には、弓状フレーム31のベアリング30が直接取り付けられる。フレームの端部は、釣り合い重り32を含む。フレームの内側は、x線源10を中心とする円の周囲に従う軌道33を含む。
【0038】
x線検出器14が、軌道33上に取り付けられる。図2Cに最も良く示されるように、モータ44が、シャフト82を介して、弓状フレーム31をピボット運動させ、モータ45が検出器を軌道33に沿って移動させる。1つの実施形態において、検出器14は、垂直位置から垂直面の両側に概ねプラス又はマイナス60度の範囲でx線源10の周囲を移動させることができる。
【0039】
使用中、対象領域及び随意的に1つ又は複数の基準マーカーの領域を含むターゲット・オブジェクトが、Yテーブル12aの上面78に固定される。キャビネットが閉じられ、x線管に通電してx線の生成を促す。これらのx線は、スポット光源から直線状に放射し、サンプルが所望の配向で画像形成されるまで、検出器及び支持部が移動される。画像は、例えば、マウス及びキーボード、又は、1つ又は複数のジョイスティックなどの適切な制御部に隣接して設けられた、キャビネットの外部スクリーン上に表示することができる。サンプル及び/又は検出器に対する相対位置を動かして、所望の方向から適切な倍率でサンプルを画像形成することができる。
【0040】
幾つかの現行のコンピュータ断層撮影製品は、その上でサンプルが回転される水平方向回転軸を提供する。この完全な回転は、オブジェクトの完全な回転による良好なデータ・セットをもたらすが、このタイプの機器と共に用いることができるサンプルのサイズを制限する。本発明は、既存の機械形状を使用するが、サンプル及び検出器のために円錐形の移動経路を提供する。これは、より大きいオブジェクトを、削減することなく再構成することを可能にするが、サンプルの完全な回転を提供するシステムと同じような完全なデータ・セットを提供するものではない。
【0041】
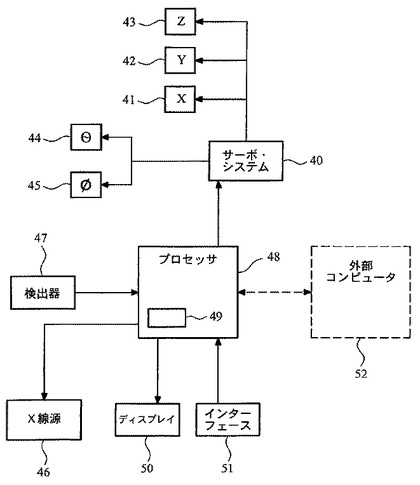
図3は、本発明によるシステムの電子要素及び制御要素の概略図である。システムの機械部品は、図2A−図2Cを参照して説明される通りである。本システムは、画像形成されるターゲット・オブジェクトのための支持部の動き、及び、対応する検出器の動きの両方を制御するように動作可能なモーション・コントローラ又はサーボ・システム40を含む。前述のように、本システムは、支持面をX方向に移動させるためのモータ41と、支持面をY方向に移動させるためのモータ42と、支持面をZ方向に移動させるためのモータ43とを含む。検出器の移動は、検出器が取り付けられる弓状フレームをピボット運動させるように動作可能なモータ44、及び、弓状フレーム上の軌道に沿って検出器を移動させるように構成されたモータ45によって達成される。
【0042】
モーション・コントローラ40は、専用マイクロプロセッサ又は適切にプログラムされたPCなどの汎用コンピュータとすることができる、プロセッサ48に接続される。以下でより詳細に説明されるように、プロセッサ48は命令をモーション・コントローラ40に送り、次いで、モーション・コントローラ40が制御信号をモータ41−45に送る。
【0043】
プロセッサ48はまた、x線源46のアクティブ化及び非アクティブ化を制御するように構成される。
【0044】
プロセッサ48はx線検出器47からの出力信号を受信し、対応する画像をディスプレイ50に送る。インターフェース51は、ユーザが画像キャプチャ・プロセスをアクティブ化すること、並びに、プロセッサの動作においてパラメータを構成すること、そして、サンプルの一部を対象領域として選択することを可能にするために提供される。動作中、検出器は画像データをプロセッサに連続的に供給するので、検出器の視野をディスプレイ51上に連続的に表示することができる。
【0045】
図3に示されるように、プロセッサ48は、メモリ49を含むことができる。代替的に又はこれに加えて、プロセッサに接続された外部デバイス内にメモリを設けることができる。図3は、プロセッサ48に接続することができ、メモリ及び画像処理機能を与えるように構成することができる外部コンピュータ52を点線で示している。画像キャプチャ機能に加えて、別個のプロセッサ上で画像処理機能が実行されることは有利であり、その結果、1つの対象領域に関する画像処理を、次の対象領域に対する画像キャプチャと同時に実行することができる。
【0046】
図6及び図7を参照してより詳細に説明されるように、プロセッサ48は、単一の対象領域の複数の投影をキャプチャするために、x線源10、支持部12、及び検出器14の動作を制御し、連係させるように構成される。特定の対象領域の複数の投影を、異なる対象領域及び検出位置で撮ることにより、その対象領域に関する投影の集積をなすことができる。次いで、トモシンセシス・アルゴリズムを使用して集積を処理し、対象領域の三次元モデルを生成することができる。411 Borel Avenue、Suite 550、San Mateo、CA94402、米国のPrexion Inc.により提供されるReconPro再構成ソリューションなどの、種々のトモシンセシス・アルゴリズム及び処理技術が、当技術分野において周知である。
【0047】
複数の画像を用いて三次元モデルを生成するための要件は、各画像についてのx線源、対象領域、及び検出器の間の正確な空間関係の知識である。実際には、このことは、有用な結果を得るために、高価な機械を使用することを意味していた。高い費用は、特に、対象領域及び検出器のための移動機構の部品の全てに必要とされる非常に厳しい公差に起因するものである。
【0048】
本発明では、この問題は、基準マーカーを使用することにより克服される。次いで、画像処理技術を用いて、キャプチャされた画像を、それらの画像の見え方が正確に位置決めされた部品に対応するように変更する。システムの可動部品の正確な制御の代わりに、キャプチャされた画像に修正を施して1組の修正された画像を提供し、次いで、トモシンセシス・アルゴリズムを用いて、修正された画像を結合し、三次元モデルを生成する。
【0049】
基準マーカーは、ターゲット・オブジェクト上に既に存在する要素の形を取ることができ、又は、画像形成プロセスに先立って、ターゲット・オブジェクトに固定された、若しくは、ターゲット・オブジェクトが取り付けられる支持部上にターゲット・オブジェクトの付近に取り付けられた要素とすることができる。
【0050】
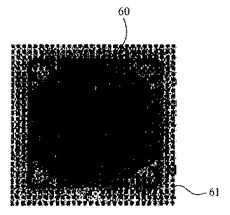
図4は、回路基板上の例示的な対象領域を示す。この特定の対象領域は、集積回路部品60と、部品を下にある集積回路基板に結合するのに用いられる複数のはんだボールを含むボール・グリッド・アレイ61とを含む。別の対象領域は、例えば1つ又は2つのはんだボールを含む、ずっと小さいものとすることができる。はんだボール61は、球形状を有すると考えることができるので、有効な基準マーカーとして使用することができる。基準マーカーとして、1つ、2つ、又はそれ以上のはんだボールを使用することができる。実際には、はんだボールは完全に球形ではないので、幾つかのはんだボールを使用することは有益である。複数のはんだボールを基準マーカーとして使用することにより、はんだボールの不完全な対称性と関連した如何なるエラーも低減される。ターゲット・オブジェクト上の他の既存の部品が既知の幾何学的形状を有し、その幾何学的形状をシステムにより実行される画像処理プロセス内に適合させ得る場合には、これらの部品を使用することができる。PCB又は半導体パッケージ内のビアは、はんだボールと非常によく似た特性を有する。さらに、Quad−Flat No−Leadパッケージなどの、より複雑であるが予測可能な幾何学的形状の部品を用いることもできる。
【0051】
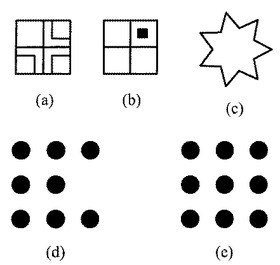
代替的に、その目的のために設計された基準マーカーを使用することができる。これらの基準マーカーを、ターゲット・オブジェクト又はターゲット・オブジェクトに近接した支持部に取り付けることができる。図5a乃至図5eは、幾つかの例示的な基準マーカーの形状を示す。基準マーカーは、用いられる典型的なエネルギー・レベルにおいてx線を通さないいずれかの適切な材料から形成することができる。使用される基準マーカーの規模は、視野及び検査されるオブジェクトに対して適切なものである必要があり、従って、x線機器又はソフトウェア・パッケージと併せて、種々の異なるサイズの基準マーカーを提供することができる。
【0052】
図5a、図5b、及び図5cにおける基準マーカーは、ほぼ平坦なマーカーであるが、これらは幾らかの高さを有している。これらは対象領域の部品と類似したx線吸収を有するように形成され、従って、これらは対象領域内の部品と類似した密度、材料特性、及び厚さを有することができる。有利なことに、対象領域を不明瞭にするのを最小限にするために、これらは可能な限り低い高さを有するように形成される。
【0053】
図5d及び図5eにおける基準マーカーは、球状のマーカーである(これらは同様に円盤状とすることができる)。直径が100μmから0.8mmまでの間の適切な球状マーカーは、器械類に使用されるベアリングの供給業者から入手することができる。これらのベアリングは、はんだボールより完全な球状であり、従って、より良好な基準マーカーとなる。
【0054】
説明されるように、基準マーカーは、画像形成された対象領域の範囲内にあってもよく、又は画像形成された対象領域の外にあってもよい。どちらの構成が用いられても、基準マーカーは、各々の投影内で認識可能でなければならない。この認識は、プロセッサ上で実行されるソフトウェアに組み込まれた画像認識技術を用いて自動的に行われる。基準マーカーの予測される画像を、1 Vision Drive、Natick、MA01760−2059、米国のCognex CorporationのVisionProソフトウェア製品によって提供されるような相関手法を用いて、画像形成された対象領域内の基準マーカーのキャプチャされた画像と比較することができる。このソフトウェアは、放射線源と検出器との間の基準マーカーの所定位置における、基準マーカーの予測された画像とキャプチャされた画像との間の変換を計算する。次いで、その変換を、その所定位置における対象領域のキャプチャされた画像に適用して、その所定位置に関する対象領域の修正された画像を生成することができる。
【0055】
図2A−図2C及び図3に示されるシステムの部品を説明し、図5における幾つかの基準マーカーの例を示したが、例示的な動作方法が、図6及び図7を参照して説明される。
【0056】
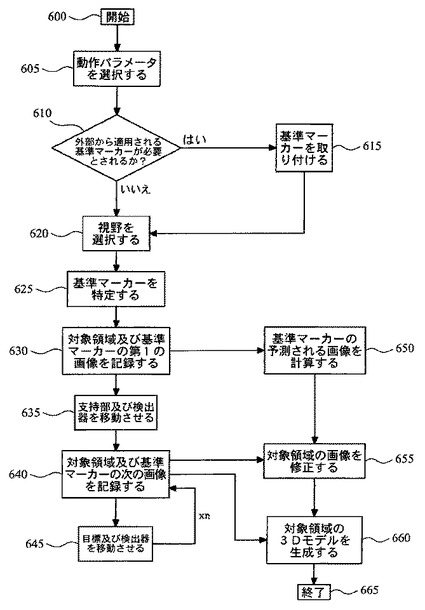
図6は、基準マーカーが対象領域の範囲内にある、画像形成方法のステップを示す。ステップ600においてプロセスが開始された後で、ステップ605において、ユーザは、x線管を加速する電圧及び電力、撮られる投影(即ち、画像)の数、画像が撮られるときに検出器14(及び支持部12)が移動する垂直面からの角度範囲、及び倍率といった種々の動作パラメータを選択することができる。図2A−図2Cに見られるように、検出器は半球の周囲を移動することができ、原則的に、その半球上のいずれかの位置において検出器を有する状態で投影を撮ることができる。検出器が位置する垂直面からの角度が大きいほど、対象領域についてより多くの情報を取得することができる。しかしながら、実際上、検出器が移動する垂直面からの角度を制限することが望ましい。これは、より大きい角度においては、x線が対象領域に到達する前に(場合によっては、到達した後に)、より多くの外部部品を通って移動するためである。従って、ユーザは、外部のオブジェクトにより生成される投影内のノイズが大きな角度の利点を上回る前に、最大の角度を用いてバランスを見出さなければならない。これは、主にターゲット・オブジェクトのトポグラフィによって決まる。画像処理を簡略化するために、説明される実施形態における検出器は、対象領域の上方のx−y面内の円上の位置に移動するように制約され、その結果、全ての投影が、垂直面に対して同じ角度で撮られる。
【0057】
ユーザはまた、撮られる投影の数も選択し、その選択は、時間の制約と最終的な三次元モデルにおける必要とされる詳細との間のバランスとすることができる。いずれの数も用い得るが、典型的には、それは12投影から720投影までの間である。
【0058】
例えば、ユーザが、撮られる72個の投影、垂直面から30°の角度、及び特定の倍率を選択した場合、プロセッサは、これらのパラメータに従って、x線源10、支持部12、及び検出器14に関して72個の異なる相対位置を計算する。結果は、支持部12及び検出器14の初期位置、並びに、支持部12及び検出器14が、x線源に対して30°の円錐角を定める円形路の周りに等しく離間配置されるように移動される71個の異なる位置となる。71個の位置は、これを通って支持部12及び検出器14が移動される所定位置とすることができる。第1の画像が記録される前のどの時点でも、プロセスの後半でこれらのパラメータの一部又は全てを選択又は調整できることは明らかである。
【0059】
ステップ610において、対象領域内に既に存在する要素を基準マーカーとして用いるか、それとも対象領域内のターゲット・オブジェクト上に基準マーカーを取り付けるかについての判断をしなければならない。ターゲット・オブジェクト上に既に存在する要素が基準マーカーとして用いられる場合、ステップ620において、プロセスが続行する。外部から与えられる基準マーカーが必要とされる場合、ステップ615において、このマーカーをターゲット・オブジェクトに取り付ける。画像形成プロセスの間、基準マーカーを対象領域に対して所定の位置に固定された状態で保持するのに十分な、いずれかの適切な固定技術を用いることができる。
【0060】
ステップ620において、ユーザは、検出器の視野を選択しなければならない。説明されるように、視野は、ターゲット・オブジェクトの対象領域を含まなければならない。視野が対象領域より大きいことが好ましいが、もたらされる三次元モデルの品質は視野の中央において最大であり、対象オブジェクトの一部を全ての投影において見ることができないコーナー部及び縁部においては比較的低品質であるので、対象領域の良質な三次元モデルに必要であるよりも大きくはないことが好ましい。視野は、カーソルを用いて視野の周りに視覚を描くことによるなど、ユーザ・インターフェースを用いてスクリーン上で選択することができる。視野の選択は、典型的には、x線源の真上又は垂直方向上方の検出器及び対象領域に対して行われる。ひとたび視野が選択されると、ユーザからのユーザ・インターフェース51を通じた入力により、プロセッサ48が、コマンド信号をモーション・コントローラ40に送る。これに応答して、モーション・コントローラ40は、選択された視野を表示するように、コマンド信号に従って検出器14及び支持部12の位置を調整する。ユーザは引き続き、視野が所望の通りになるまで、検出器14及び支持部12の位置を調整することができる。
【0061】
視野を選択すると、ステップ625において、基準マーカーを特定しなければならない。本実施形態において、基準マーカーは対象領域内に、従って、選択された視野内にある。基準マーカーを選択するために、ここで検出器及び支持部が、x線源の真上又は垂直方向上方の位置から初期位置に移動され、それにより検出器及び支持部は、第1の投影のために垂直面からの所望の角度に配置される。基準マーカーは、ユーザ・インターフェースを用いてスクリーン上で選択される。ユーザは、カーソルを用いて、又はディスプレイ上の視野の部分の周囲にボックスをドラッグして、基準マーカーを特定することができる。支持部12及び検出器14がこれらの初期位置にある状態で、次に、ステップ630において、対象領域を含む視野の第1の画像が検出器により記録され、メモリ49内に格納される。ユーザにより基準マーカーとして選択された画像の部分もまた、メモリ49内に格納される。基準マーカーの画像及び位置は、検出器により記録されるその後の投影の各々における1つ又は複数の基準マーカーの予測される画像を計算するための基礎として用いられる。システムは基準マーカーの幾何学的形状及び位置と、各々の投影における支持部及び検出器の所定位置を知っている。この情報を用いて、所定位置の各々において撮られる投影における基準マーカーの予測される画像及び位置を計算することが可能である。
【0062】
次いで、各々の位置における対象領域及び基準マーカーの画像を記録するために、所定位置の各々を通って支持部12及び検出器14を移動させる必要がある。前述のように、各々の投影に関する支持部12及び検出器14の位置は、ユーザが設定したパラメータに基づいてプロセッサ48により計算される。前述の例においては、ユーザは、撮られる72個の投影、検出器についてのx線源の垂直方向上方から30°の角度、及び特定の倍率を選択し、次いで、プロセッサは、これらのパラメータに従って、x線源10、支持部12、及び検出器14についての72個の異なる相対位置を計算した。ステップ635、640、及び645において、モーション・コントローラは、支持部12及び検出器14を残りの71個の所定位置の各々に連続的に移動させ、検出器14は、各々の位置における対象領域及び基準マーカーを含む視野の画像を記録する。モーション・コントローラは、インクリメント信号をサーボ・モータ42−45に送り、支持部及び検出器を順に次の位置に移動させる。ステップ640及び645は、必要な画像の全てが記録されるまで繰り返される(図6は、ステップ640及び645がn回繰り返されることを示す)。必要な画像の全てが記録された後、信号がステップ640からステップ660に送られ、対象領域の修正された画像から対象領域の3Dモデルを生成する。
【0063】
基準マーカーの予測される画像の計算が、ステップ650として示される。既述のように、投影ごとのx線源、対象領域、及び検出器の間の所望の空間関係は、ユーザが設定したパラメータに基づいて計算される。従って、この空間関係、並びに基準マーカーの幾何学的形状及び位置の知識に基づいて、位置ごとに、基準マーカーの予測される画像及び位置を計算することができる。この例では、基準マーカーは、垂直軸を中心に回転対称を有し、検出器はx線源に対して固定された円錐角の円形路の周りに移動するように制約され、その結果、基準マーカーは、各々の投影において同じサイズ及び形状に見え、視野内でのその位置のみが変わるように推定される。しかしながら、基準マーカーは、必要に応じて、より複雑な幾何学的形状を有し得る。次いで、その幾何学的形状の記述は、プロセッサにより実行される画像処理計算において、パラメータとして含まれる。
【0064】
ステップ650における基準マーカーの予測される画像の計算は、画像キャプチャ・ステップ635乃至645と同時に又は連続して実行することができる。ステップ650はまた、図3を参照して説明されたように、画像キャプチャ処理とは別個のプロセッサ52上で実行してもよい。
【0065】
ステップ655において、所定位置の各々について、基準マーカーの予測される画像の各々を、基準マーカーの対応するキャプチャされた画像と比較する。所定位置の各々について、プロセッサ48(又は52)は、基準マーカーのキャプチャされた画像を予測される画像にマッピングするための変換を計算する。このことは、画像からの相関又はエッジ抽出により基準マーカーの具体的な特徴又は基準マーカーの位置を識別し、それらの空間関係を見つけ出すことにより為される。次いで、所定位置の各々についてのこの変換を、その所定位置における対象領域のキャプチャされた画像に適用して、その所定位置における対象領域についての修正された画像を生成する。修正された画像は、事実上、位置決め機構が支持部及び検出器を所望の通りに正確に位置決めできた場合にキャプチャプされた画像となる。
【0066】
全ての所定位置に関する対象領域の画像が修正されると、ステップ640からの信号に応答して、ステップ660において修正された画像を結合し、対象領域の三次元モデルを生成する。これらの画像は、上記で参照したPrexion Inc.により提供されるReconPro再構成ソリューションのようなトモシンセシス・アルゴリズムを用いて結合することができる。
【0067】
次いで、三次元モデルは、ユーザによるディスプレイ50上での閲覧に利用可能にされ、接合部におけるボイド形成のレベル及び不完全なはんだ接合といった欠陥を探すために、ユーザ・インターフェース51を用いて、ユーザにより閲覧するように、モデルを通る異なるスライスを選択することができる。この欠陥分析は、製造プロセスの最適化のためにも、製造品目が一貫したままであり、品質閾値を満たしていることをチェックすることによるプロセス制御のためにも有用である。
【0068】
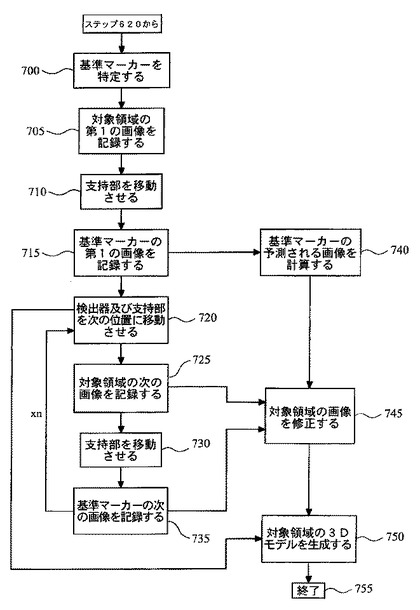
図7は、図6に示される方法の変更を示し、これは、対象領域の外部にある基準マーカーの使用を可能にする。例えば対象領域が電子部品で密に覆われている場合、基準マーカーを対象領域の外部に、しかし、同じ基板上又は支持部上に直接配置することができる。図7の実施形態における方法は、図6に示される同じ開始ステップ600乃至620を含む。図7は、本方法における後のステップのみを示す。ステップ700において、基準マーカーをユーザにより特定しなければならない。このことは、ステップ620において対象領域に関して選択された視野から基準マーカーを囲む視野に、検出器の視野を変更することを必要とする。これを行うために、ユーザ・インターフェース51及びスクリーン50を用いて、ユーザは、検出器14が静止状態のままにしながら、支持部12の動きを制御する(理想的には、倍率が変わらないように同じXY面内で)。支持部は、所望の基準マーカーが視野内にあり、理想的にはスクリーンの中央にある位置まで移動される。次いで、基準が対象領域の視野内にある場合に上述されたように、検出器及び支持部は、x線源の真上又は垂直方向上方の位置から初期位置に移動され、それにより検出器及び支持部は、第1の投影のための垂直面からの所望の角度で配置される。次いで、カーソルを用いて、又はスクリーン上の基準の画像の周囲にボックスをドラッグして、基準が特定される。
【0069】
上記のプロセス中、対象領域に関する視野のx及びy位置に対する、基準に関する視野のx及びy位置が格納される。次に、x及びyオフセット信号としてメモリ内に格納できるこれらのx及びy位置は、x及びyモータ41、42の制御下で、後で、対象領域に関する視野の位置と基準マーカーに関する視野の位置との間で支持部を移動させるのに用いることができる。
【0070】
次いで、画像キャプチャ・プロセスは、検出器及び対象領域の所定位置の各々について、対象領域を含む視野の画像を記録し、次に基準マーカーを含む視野の画像を記録することによって進行する。ステップ705において、第1の所定位置について、対象領域の画像を記録する。次いで、ステップ710において、x線源に対して検出器を静止状態に保持しながら、基準が第1の所定位置に来るように、格納されたx及びyオフセット信号を用いて、支持部が移動される。次いで、ステップ715において、基準を含む視野の第1の画像が記録される。ステップ700は、前もってではなく、ステップ710の後に実行することができ、実際上、これはユーザにとってより好都合であり得ることを認識すべきである。また、対象領域及び検出器の所定位置の各々について、対象領域の後ではなく、その前に基準マーカーを画像形成できることも認識すべきである。
【0071】
ステップ720において、検出器及び支持部(即ち、対象領域)の両方が、対象領域の次の投影に対応する次の所定位置に移動される。ステップ725において、この次の所定位置において、対象領域を含む視野の画像が記録される。ステップ730において、対象領域の画像が記録されたばかりの所定位置に基準が配置されるまで、検出器をx線源に対して静止状態に保持しながら、XYオフセット信号を用いて支持部が移動される。ステップ735において、この所定位置における基準マーカーを含む視野の画像が記録される。次いで、プロセスはステップ720に戻り、対象領域及び検出器の所定位置の各々について、対象領域の画像及び基準マーカーの画像がキャプチャされるまで、ステップ720乃至735が繰り返される。以下で説明されるように、全ての所定位置について画像がキャプチャされた後、信号をステップ722からステップ752に送って、三次元モデルを生成する。
【0072】
ステップ740において、図6を参照して説明されたのと同じ方法で、基準マーカーの予測される画像の計算が実行される。ステップ745において、所定位置の各々について、基準マーカーの予測される画像の各々が、基準マーカーの対応するキャプチャされた画像と比較され、キャプチャされた画像の各々について変換を計算し、キャプチャされた画像を予測される画像にマッピングする。図6を参照して説明されたのと同じ技術を用いることができる。次いで、所定位置の各々に関する変換を、対象領域の対応するキャプチャされた画像に適用して、所定位置の各々に関する対象領域の修正された画像を生成する。第1の画像に続く各々の投影について、対象領域の修正された画像を生成する。前述のように、ステップ750において、ステップ720から、全ての所定位置に関する画像がキャプチャされたとの信号を受信すると、次いで、ステップ750において、第1の画像及びその後の修正された画像がトモシンセシス・アルゴリズムにおいて結合され、対象領域の三次元モデルを生成する。
【0073】
支持部の移動が反復可能である場合、対象領域及び基準マーカーを別々に画像形成することは、比較的不正確な位置決め機構において実用的である。従って、対象領域の所定位置に基準マーカーを移動させる都度、正確に支持部を動かすことは不可能であるが、制御信号は同じであり、結果として生じる動きも同じである。ステップ730に関して、支持部が静止状態である間、対象領域と基準マーカーの間で移動されるのは、支持部ではなく検出器とすることができることを認識すべきである。図2に示される機構においては、支持部の動きの方がより反復可能であるため、検出器を静止状態に保ち、支持部を移動させることが好ましい。しかしながら、異なる機械構成では、これが当てはまらない場合もあり得る。
【0074】
本発明は特定の実施形態を参照して説明されたが、同じ発明概念を用いながら、本システム及び方法に対して多数の変更を行うことができることは明確であるはずである。例えば、ターゲット・オブジェクト及び検出器を移動させるために、異なるシステムを使用してもよく、異なるシステムは、結果として得られるキャプチャされた画像に異なるエラーを導入する。用いられるシステムに関わりなく、適切な基準マーカーの使用により、修正された画像を生成することが可能になる。
【符号の説明】
【0075】
10、46:x線源
12:支持部
12a:Yテーブル
12b:Xテーブル
14、47:検出器
16:領域
20:フレーム
21:脚部
25:ビーム
26:支持プレート
30:ベアリング
31:弓状フレーム
32:釣り合い重り
33:軌道
40:モーション・コントローラ(サーボ・システム)
41、42、43、44、45:モータ
48:プロセッサ
49:メモリ
50:ディスプレイ
51:インターフェース
52:外部コンピュータ(プロセッサ)
60:集積回路部品
61:ボール・グリッド・アレイ(はんだボール)
76、82:シャフト
90:クロスビーム
96:チーク
【技術分野】
【0001】
本発明は、複数の二次元画像を用いて、ターゲット・オブジェクトの対象領域(region of interest)の三次元モデルを生成するように構成された画像形成システム(imaging system)に関する。より具体的には、本発明は、安価な画像形成機器を使用して高品質な三次元モデルを得ることを可能にするように、既知の幾何学的形状の基準マーカーを使用するX線画像形成システムに関する。
【背景技術】
【0002】
欠陥の存在を確認するため又は欠陥の原因を判定するために、回路部品及びその実装を検査する必要がある。プリント回路基板の上の集積回路部品及びその実装の内部構造を検査するための1つの周知の技術は、X線画像形成である。X線源からのX線は、回路基板上の対象領域を透過し、その結果として得られるX線画像、即ち投影が、回路基板上のX線源とは反対側にあるX線検出器により検出される。これにより、対象領域を透過する二次元画像即ちスライスが生成される。X線源は、対象領域を透過するのに十分なエネルギーをもったX線を生成すると同時に、結果として得られる画像内に著しいコントラストを生成するのに十分なほど低いエネルギーも有している。
【0003】
この二次元画像形成技術は有効であるが、不十分な情報を提供することが多い。例えば、対象領域を通る所望の視野を遮るオブジェクトが存在することがあり、又は、単に、対象領域が十分に複雑であり三次元で調べることを必要とすることがある。対象領域は、部品の全体若しくはほんの一部であってもよく、又は幾つかの部品であってもよい。
【0004】
対象領域の三次元モデルは、トモシンセシス(tomosynthesis)を用いて、対象領域を通る異なる視点又は投影から撮られる多数の二次元画像を結合することによって得ることができる。結果として得られる三次元モデルにより、ユーザが、対象領域を通るあらゆる面を検査し、三次元画像を調べてボイドなどの欠陥を見つけ出すことが可能になる。しかしながら、トモシンセシスから良好な結果を得るためには、X線源、対象領域、及び検出器の相対位置及び配向を高精度で知る必要がある。使用される数式において必要とされるため、トモシンセシスにおいて二次元画像を結合する方法は、この幾何学的情報に依存している。その結果、既存のトモシンセシス・システムは、システムの要素、即ちX線源、対象領域、及び検出器を互いに対して移動させるための高精度の機械的システムを必要とする。このように高精度の機械設備を必要とすることから、トモシンセシスのx線画像形成システムは、二次元のx線画像形成システムよりも遥かに高価なものになっている。
【発明の概要】
【発明が解決しようとする課題】
【0005】
対象領域の有用なトモシンセシス・モデルを提供することができる比較的安価な画像形成システムを提供することが望ましい。
【課題を解決するための手段】
【0006】
本発明の第1の態様において、例えばトモシンセシス・システムにおいて、ターゲット・オブジェクトの対象領域の三次元表現を生成する方法が提供される。本方法は、
a)ターゲット・オブジェクトの対象領域において、又は対象領域に対して固定された可動表面上に、既知の幾何学的形状の基準マーカーを特定するステップと、
b)対象領域及び基準マーカーが放射線源に対して第1の位置にあり、検出器が放射線源に対して第1の検出位置にあるときに、検出器により放射線源からの放射線を検出することにより、基準マーカーの第1の画像及び対象領域の第1の画像を作成するステップと、
c)基準マーカー及び対象領域を、放射線源に対して第2の位置に移動させ、検出器を放射線源に対する第2の検出位置に移動させるステップと、
d)対象領域及び基準マーカーが放射線源に対して第2の位置にあり、検出器が放射線源に対して第2の検出位置にあるときに、検出器により放射線源からの放射線を検出することにより、基準マーカーの第2の画像及び対象領域の第2の画像を作成するステップと、
e)基準マーカーの第2の画像と基準マーカーの予測される第2の画像に関する情報との比較を用いて、対象領域についての修正された第2の画像データを生成するステップと、
f)第1の画像又は修正された第1の画像データ、及び対象領域に関する修正された第2の画像データを用いて、対象領域の三次元表現を生成するステップと、
を含む。
【0007】
第1の態様による方法は、画像処理中に位置の不正確さを修正することによって、比較的正確ではない、従って安価な位置決め機構を使用することを可能にする。典型的には、放射線源は固定されており、ターゲット・オブジェクト及び検出器は、放射線源に対する所定位置を通って移動する。本発明の第1の態様による方法は、ターゲット・オブジェクトの対象領域上又はその付近の既知の幾何学的形状の基準マーカーを用いて、対象領域及び基準マーカーのキャプチャされた画像を調整し、放射線源に対する検出器及び対象領域の位置決めにおける不正確さを補償する。この方法では、対象領域及び基準マーカーの両方が所定位置を通って移動される。各々の所定位置における放射線源、対象領域(及び基準マーカー)、及び検出器の間の意図される空間関係は既知である。基準マーカーの幾何学的形状は既知である(又は、既知であると推定される)。この情報を基準マーカーの既知の又は測定された初期位置と併せて使用し、基準マーカー及び検出器の所定位置の各々について、基準マーカーの予測される画像を計算することができる。
【0008】
次いで、画像変換を計算し、各々の所定位置において、基準マーカーのキャプチャされた画像を基準マーカーの予測される画像にマッピングすることができる。この画像変換を後で用いて、所定位置の各々についてのキャプチャされた対象領域の画像を変換し、各々の所定位置についての対象領域の対応する修正された画像を生成することができる。事実上、画像は、画像形成システムの要素に対して、それらが各々の所定位置において理想的な空間関係にあった場合に撮られたであろう画像に対応するように変換される。
【0009】
次いで、各々の所定位置についてのこれらの修正された画像をトモシンセシス技術により結合して、対象領域の3Dモデル又は画像を作成する。
【0010】
このように、本方法は、良好な品質の三次元画像を生成するために、他の場合には十分に正確な機械的位置決め部品をもたない既存のx線画像形成機械と共に、トモシンセシス技術を用いることを可能にする。従来のトモシンセシス・システムにおいては、検出器及びターゲット・オブジェクトの位置が、検出器上のピクセルの何分の1、典型的にはミクロンの何分の1かの範囲内まで正確に知られる必要がある。このことは、移動機構内の機械部品の全てを、非常に厳しい公差の範囲内に非常に正確に機械加工することを必要とする。これがトモシンセシス機械のコストの主要な要因である。本発明においてはこうした厳しい公差は必要とされず、従って、本方法は、ユーザに著しいコスト削減を提供する。
【0011】
本方法は、対象領域内に既に存在する特徴を基準マーカーとして特定することを含むことができる。例えば、対象領域内のはんだボール又ははんだボールのアレイを基準マーカーとして選択することができる。各々のはんだボールは回転対称であると推定することができ、そのサイズ(ボールのアレイが用いられる場合はその空間関係)を第1の画像内に定めることができる。この情報を用いると、放射線源、対象領域、及び検出器が異なる所定位置にある状態で、キャプチャされた対象領域の投影内で、基準マーカーがどのように見えるかを計算することは容易である。基準マーカーは、適切なユーザ・インターフェースを用いて、スクリーン上でユーザにより選択することができる。ユーザ・インターフェースは、ユーザが、例えばカーソルを用いて基準マーカーの周囲にボックスを描くことを可能にする、例えば、マウス、ジョイスティック、キーボード、又はタッチ・センシティブ・スクリーンを含むことができる。
【0012】
代替的に又は付加的に、本方法は、対象領域内、又はターゲット・オブジェクト上若しくは、ターゲット・オブジェクトのための支持部上の対象領域に近接して、基準マーカーを配置するステップを含むことができる。例えば、回路基板の対象領域内で、はんだボール又は他のマーカーを回路基板の上に取り付けることができる。代替的に、例えば対象領域が部品で密に覆われている場合には、基準マーカーを、対象領域の外ではあるがターゲット・オブジェクト又は支持部上に配置することができる。次いで、画像キャプチャ方法は、放射線源、対象領域、及び検出器が第1の位置にあるとき、即ち第1の空間関係を有するとき、対象領域の画像をキャプチャし、次いで、検出器を固定状態にしながらターゲット・オブジェクトのための支持部を移動させて、基準マーカーが対象領域の場所に来るようにし、その結果、放射線源、基準マーカー、及び検出器が第1の空間関係を有するようにするステップを含むことができる。この対象領域及び基準マーカーの一方の画像をキャプチャし、続いて対象領域及び基準マーカーの他方の画像をキャプチャするプロセスは、各々の対象領域、基準マーカー、及び検出器の所定位置について繰り返される。次いで、基準マーカーが対象領域内にある場合と同様に、基準マーカー及び対象領域の画像を使用して、修正された画像データを提供することができる。このことは、著しいエラーをもたらすことなく可能であり、それは、検出器及びターゲット・オブジェクトのための支持部の移動は、サーボ・モータなどのこれらの部品に対して安価な移動機構を使用するときでさえ、必ずしも非常に正確であるとは限らないが、典型的には一貫した方法で繰り返すことができるためである。
【0013】
また、取り付けられた基準マーカーを含むように、既にターゲット・オブジェクト上に存在するが対象領域の外部に位置する、この目的のために設けられた基準マーカーを使用すること、又はさらに支持部のために設けられた基準マーカーを使用することも可能である。例えば、回路基板の製造者にとって、製造中に各々の回路基板上の所定位置に基準マーカーを含ませることが望ましいことがある。基準マーカーを、回路基板上の比較的空いた位置に有利に配置することができる。この場合、基準マーカーが対象領域の外部にある場合、本方法は、対象領域、基準マーカー、及び検出器の所定位置の各々について、対象領域及び基準マーカーの一方の画像をキャプチャし、続いて対象領域及び基準マーカーの他方の画像をキャプチャするステップを含む。
【0014】
本方法は、例えば、対象領域及び基準マーカーが放射線源に対して第3の位置にあり、検出器が放射線源に対して第3の位置にあるときに、検出器により放射線源からの放射を検出することによって、基準マーカーの第3の画像及び対象領域の第3の画像を作成するステップなど、対象領域、基準マーカー、及び検出器の後の所定位置に対して修正された画像データを作成するステップ、及び、基準マーカーの第3の画像と基準マーカーの予測される第3の画像に関する情報との比較を用いて、対象領域に関する修正された第3の画像データを生成するステップをさらに含むことができ、対象領域の三次元表現を生成するステップは、修正された第3の画像データを用いる。
【0015】
本方法は、多数の異なる位置から対象領域及び基準マーカーの画像を生成するステップ、及び、各々の位置について、対象領域に関する対応する修正された画像データを生成するステップを有利に含むことができる。対象領域、基準マーカー、及び検出器に関する所定位置の数が多いほど、対象領域の三次元表現内に、より多くの情報を含ませることができる。
【0016】
基準マーカーは、複数の基準マーカー要素を含むことができる。例えば、基準マーカーは、2つ、3つ、又はそれ以上のはんだボールを含むことができる。基準マーカー要素は、対象領域の全体にわたって離間配置することができる。画像全体にわたる、又は画像全体に典型的なエラーを示す画像領域からの情報を与えるように配置された基準マーカーのアレイは、回転、縮尺、台形歪みの修正、又はより高次の変換のための情報を提供することができる。対象領域の内部に配置された単一の基準マーカーが、やむを得ず、対象領域内の他の部品により覆い隠されることもある。それにより、基準の検出、及び後の画像の変換が不正確になる可能性がある。しかしながら、基準マーカーのアレイを有することで精度が向上し、検出がずっとロバストなものとなる。全ての基準が同時に他の部品により覆い隠される可能性は極めて低い。正確な検出のためには、一度に少なくとも1つの閉塞されない基準を有することで十分である。
【0017】
基準マーカーは、所定の非対称な形状を有することができる。例えば、基準マーカーは1つのアームが欠けた星の形態をとることができる。非対称な形状は、高度に対称的な基準マーカーと比べて、絶対的な位置指標を与えることによる回転のエラー及び支持部又は検出器のピッチ又は傾斜に起因する歪みについて、より多くの情報を提供することができる。このような独特の形状はまた、各々の画像において明確に認識することができるという利点をも有し得る。
【0018】
しかしながら、処理を簡単にするために、はんだボールのような球状のマーカーを使用することができる。次いで、基準マーカー又は各々の基準マーカー要素が回転対称を有するという推定に基づいて、基準マーカーの予測される第2の画像を計算することができる。これにより、必要とされる画像処理が簡略化される。
【0019】
本発明の第2の態様において、ターゲット・オブジェクト上の対象領域の三次元表現を生成するシステムであって、
x線源と、
ターゲット・オブジェクト及び既知の幾何学的形状の基準マーカーを支持するように構成された支持部、及び、支持部を移動させるように構成された支持部搬送機構と、
x線検出器、及び検出器を移動させるように構成された検出器搬送機構と、
支持部搬送機構及び検出器搬送機構に接続されたモーション・コントローラと、
を含み、モーション・コントローラは、コマンド信号を支持部搬送機構に与えて対象領域及び基準マーカーを第1の位置から第2の位置に移動させ、かつ、コマンド信号を検出器搬送機構に与えて検出器を第1の検出位置から第2の検出位置に移動させるように構成され、対象領域及び基準マーカーが第1の位置にあり、検出器が第1の検出位置にあるとき、及び、対象領域及び基準マーカーが第2の位置にあり、検出器が第2の検出位置にあるとき、x線源からのx線が対象領域及び基準マーカーを通って検出器に伝送され、
検出器から信号を受信し、対象領域及び基準マーカーの画像を生成するように構成された、検出器に結合された画像プロセッサが設けられ、画像プロセッサは、
第2の位置における基準マーカーの予測される画像を計算し、
第2の位置における基準マーカーの予測される画像と、基準マーカーの第2の画像との比較を用いて、対象領域の修正された第2の画像を生成し、
対象領域の第1の画像、又は対象領域の第1の画像についての修正された画像データ、及び対象領域の修正された第2の画像を用いて、対象領域の三次元表現を生成する、
ように構成されるシステムを提供する。
【0020】
本システムは、検出器からの信号に基づいて画像データを表示するように構成された視覚ディスプレイと、ユーザ・インターフェースとをさらに含み、ユーザ・インターフェースは、ユーザがディスプレイ上の画像内から基準マーカーを選択することを可能にするように構成される。
【0021】
検出器搬送機構は、検出器が結合されるピボット運動可能な弓状の軌道を含むことができる。支持部搬送機構は、支持部が、3つの直交方向に独立して移動するのを可能にするように構成することができる。画像プロセッサは、本発明の第1の態様の方法ステップのいずれかを実行するように構成することができる。
【0022】
本発明の第3の態様において、コンピュータ可読ストレージ媒体が提供され、これにより、ユーザがx線画像形成装置を用いて本発明の方法を実施することが可能になる。このx線画像形成装置は、x線源と、対象領域及び既知の幾何学的形状の基準マーカーのための支持部を移動させる支持部搬送機構と、x線検出器と、検出器を移動させるように構成された検出器搬送機構と、支持部搬送機構及び検出器搬送機構に接続されたモーション・コントローラとを含み、モーション・コントローラは、コマンド信号を支持部搬送機構に与えて対象領域及び基準マーカーを第1の位置から第2の位置へ移動させ、かつ、コマンド信号を検出器搬送機構に与えて検出器を第1の検出位置から第2の検出位置に移動させるように構成され、対象領域及び基準マーカーが第1の位置にあり、検出器が第1の検出位置にあるとき、及び、対象領域及び基準マーカーが第2の位置にあり、検出器が第2の検出位置にあるとき、x線源からのx線が対象領域及び基準マーカーを通って検出器に伝送される。この装置が与えられると、コンピュータ可読ストレージ媒体は、x線画像形成装置に接続されたコンピュータ・プロセッサによって実行されるときに、コンピュータ・プロセッサに、
対象領域及び基準マーカーを選択するようにユーザに要求し、
受信した画像データに基づいて、第1及び第2の位置における対象領域及び基準マーカーの画像を生成させ、
第2の位置における基準マーカーの予測される画像を生成させ、
第2の位置における基準マーカーの予測される画像と、第2の位置における基準マーカーの画像との比較を用いて、第2の位置における対象領域についての修正された画像データを生成させ、
第1の位置における対象領域の画像、又は第1の位置における対象領域についての修正された画像データ、及び第2の位置における対象領域についての修正された画像データを用いて、対象領域の三次元表現を生成させる、
実行可能命令を格納する。
【0023】
コンピュータ可読ストレージ媒体はまた、x線画像形成装置に接続されたコンピュータ・プロセッサによって実行されたときに、モーション・コントローラの動作を制御する、実行可能命令を保持することもできる。コンピュータ可読ストレージ媒体はまた、x線画像形成装置に接続されたコンピュータ・プロセッサにより実行されたときに本発明の第1の態様の方法ステップのいずれかを実行する、実行可能命令を保持することもできる。
【0024】
本発明は、基準マーカーが、対象領域と共に移動されるときに対象領域に対して定位置を保持するように、対象領域に対して定位置に取り付けることができる1つ又はそれ以上の基準マーカーと組み合わせた、第3の態様に従ったコンピュータ可読ストレージ媒体を提供する。
【0025】
ここで本発明の実施形態が、一例として添付の図面を参照して詳細に説明される。
【図面の簡単な説明】
【0026】
【図1】X線画像形成システム上の部品を示す概略図である。
【図2A】本発明の一実施形態による支持部ステージ、x線源、及び検出器の等角図である。
【図2B】本発明の一実施形態による支持部ステージ、x線源、及び検出器の等角図である。
【図2C】本発明の一実施形態による支持部ステージ、x線源、及び検出器の等角図である。
【図3】本発明の一実施形態による画像形成システムの要素を示す概略図である。
【図4】検出器の視野及び基準マーカーの視野を示す。
【図5】(a)〜(e)は幾つかの例示的な基準マーカーを示す。
【図6】本発明の1つの実施形態による方法を示す流れ図である。
【図7】本発明の別の実施形態による、図6に示される方法に対する変更を示す流れ図である。
【発明を実施するための形態】
【0027】
図1は、x線画像形成システムの基本要素の概略図である。図1に示されるシステムは、このシステムにおいては固定状態で保持されるx線源10と、可動支持部12と、可動検出器14とを含む。x線源は比較的かさばる大型部品なので、x線源を固定状態で保持することは有利である。システムはまた、比較的柔軟性がなく移動させるのが困難な、非常に大電力のケーブルを必要とする。x線源10からのx線は、支持部、及び支持部上に取り付けられたいずれかのターゲット・オブジェクトを透過し、検出器14上に衝突する。図1は、検出器14の視野に対応する支持部上の領域16を図示する。検出器の視野は、ユーザにより、ターゲット・オブジェクトの対象領域が検出器の視野内に入るように、検出器14、支持部12、及びx線源10の相対的位置決めによって選択される。検出器は、異なる位置に移動することができ、支持部上の物体を透過する異なる投影を取ることができる。この文脈において、異なる投影とは、x線が支持部上の物体を異なる方向に透過することを意味する。検出器14は、典型的には、支持部12の上方のXY面内の連続した位置に移動され、一連の異なる投影を同じ倍率で収集する。検出器を移動させるための例示的な機構が図2に示されるが、いずれの適切な機構を用いることもできる。
【0028】
支持部12は、支持部上の対象領域をx線源と検出器の間の位置に移動させることができるように、XY面内を移動可能である。図1に示される例においては、支持部12はまた、垂直方向即ちZ方向にも移動可能である。これにより、検出器において検出される画像の倍率を調整することが可能になり、即ち、x線源と支持部、及び、x線源と検出器の間の相対距離に応じて、支持部のより広い又は狭い領域が検出器の視野に入るようにすることができる。説明されたように、対象領域は視野内に入っていなければならない。生成される三次元モデルの品質は視野の縁部においてより低くなるので、視野は、対象領域よりやや大きいことが好ましい。これは、画像が完全に互いに重なり合うわけではなく、従って、三次元モデルの縁部は中央領域より少ない画像から生成されるからである。しかし、最高の解像度を提供するために、ユーザは、対象領域全体の良質な三次元モデルを可能にする最小の視野を選択すべきである。
【0029】
図1において、検出器14は4つの異なる位置で示され、支持部上に対応する4つの領域16が存在する。さらに多くの位置が可能であることを理解すべきである。三次元モデルは、いかなる数の投影からも構築することができ、実際には、12個から720個までの間の投影のいずれも用いられる。
【0030】
一般に、x線源10は、電子銃からの電子を加速し、エネルギー電子を金属のターゲットと衝突させることにより、x線のビームを生成する管を含む。1つの実施形態において、x線源は、1つより多い位置において金属ターゲットにぶつかるように電子ビームを移動させる能力を欠く固定型、即ち非可動型のx線源とすることができる。ビームに含まれているx線は、支持部12上のターゲット・オブジェクトの厚さを貫通するのに十分なエネルギーをもっているので、減衰したx線が検出器14に達する。対象領域内の異なる密度の材料によるx線の減衰のレベル差が、検出器によりキャプチャされる結果として得られる画像におけるコントラストをもたらす。
【0031】
支持部12上に取り付けることができる典型的なターゲット・オブジェクトは、電子部品、集積回路、及び部品と回路素子との間のボンドを含むプリント回路基板である。常に複数の回路基板が基材上に取り付けられ得るが、単一の可動検出器により、常に単一の対象領域だけが検出器の視野内に画像形成される。
【0032】
図1に示される検出器14は、デジタル検出器14とすることができ、当技術分野において周知の構成を有することができる。一般に、検出器はアクティブ領域と、アクティブ領域の上の入ってくるx線を測定又は画像形成することができる別の信号タイプに変換するセンサと、信号の振幅を高めるのに使用される増幅器とを含む。信号は、検出器14内でアナログ形式からデジタル形式に変換され、フォーマットされたデジタル画像が検出器から出力される。例示的なデジタル検出器は、アクティブ領域を構成するシリコン・フォトダイオードの二次元ピクセル・アレイを含む相補型金属酸化膜半導体(CMOS)のフラット・パネル型検出器のような、デジタル電荷結合素子(CCD)カメラである。1つの実施形態において、検出器は、3メガピクセルの150mm×120mmのアクティブ領域によって特徴付けられるフラット・パネル型検出器である。検出器14のアクティブ領域が支持部上の対象領域及びx線源に面しており、対象領域及び検出器が適切に位置決めされている場合には、対象領域を透過するX線は検出器14上に衝突する。
【0033】
図2A−図2Cは、本発明と併せて使用することができる、支持部ステージ、X線源、及び検出器を有するx線装置の一例を示す。装置は、脚部21上に支持されるフレーム20を含み、脚部21自体はキャビネット内に取り付けられる(図示せず)。このキャビネットは通常の種類のものであり、x線の悪影響からユーザを保護するための遮蔽エンクロージャを提供する。x線を生成するためのx線管10及び検出器14が、フレーム20上に取り付けられる。画像形成される対象領域を有するターゲット・オブジェクトを支持するように適合された、後で詳細に説明される可動支持部12が、x線源と検出器との間にある。
【0034】
脚部21の各対は、フレーム20のそれぞれのビーム25を支持する。図2B及び図2Cにおいては、他の部品をより明瞭に示すために、脚部21及びビーム25が取り除かれていることに留意されたい。クロスビーム90はビーム25上に載っている。ビーム25及びクロスビーム90は、ほぼ矩形の周囲フレームを含む。フレーム20はまた、ビーム90にほぼ垂直面で取り付けられた主支持プレート26も含む。支持プレート26は比較的大型かつ剛性であり、フレーム20の主要な構造的要素を含む。
【0035】
x線管10は、支持プレート26の一方の側に直接取り付けられる。管10は、脚部21に対して中央に配置され、従って、プレート26は一方の側に僅かにオフセットされる。支持プレート26の他方の側には、対象領域を含むターゲット・オブジェクトがその上に固定された可動支持部12を垂直方向に位置決めすることができるz軸モータ43が、直接取り付けられる。
【0036】
図2Bに最も良く示されるように、可動支持部12は、Xテーブル12bの上部に取り付けられたYテーブル12aから成る。Y軸モータ42がYテーブル12aをY方向に移動させ、X軸モータ41がYテーブル12a及びXテーブル12bの両方をX方向に移動させる。Z軸モータ43は、シャフト76を垂直方向に往復運動させる。シャフト76はXテーブル12bに接続され、Xテーブル12b及びYテーブル12aを垂直方向に移動させる。
【0037】
支持プレート26の外側端は剛性のチーク96を有し、この上には、弓状フレーム31のベアリング30が直接取り付けられる。フレームの端部は、釣り合い重り32を含む。フレームの内側は、x線源10を中心とする円の周囲に従う軌道33を含む。
【0038】
x線検出器14が、軌道33上に取り付けられる。図2Cに最も良く示されるように、モータ44が、シャフト82を介して、弓状フレーム31をピボット運動させ、モータ45が検出器を軌道33に沿って移動させる。1つの実施形態において、検出器14は、垂直位置から垂直面の両側に概ねプラス又はマイナス60度の範囲でx線源10の周囲を移動させることができる。
【0039】
使用中、対象領域及び随意的に1つ又は複数の基準マーカーの領域を含むターゲット・オブジェクトが、Yテーブル12aの上面78に固定される。キャビネットが閉じられ、x線管に通電してx線の生成を促す。これらのx線は、スポット光源から直線状に放射し、サンプルが所望の配向で画像形成されるまで、検出器及び支持部が移動される。画像は、例えば、マウス及びキーボード、又は、1つ又は複数のジョイスティックなどの適切な制御部に隣接して設けられた、キャビネットの外部スクリーン上に表示することができる。サンプル及び/又は検出器に対する相対位置を動かして、所望の方向から適切な倍率でサンプルを画像形成することができる。
【0040】
幾つかの現行のコンピュータ断層撮影製品は、その上でサンプルが回転される水平方向回転軸を提供する。この完全な回転は、オブジェクトの完全な回転による良好なデータ・セットをもたらすが、このタイプの機器と共に用いることができるサンプルのサイズを制限する。本発明は、既存の機械形状を使用するが、サンプル及び検出器のために円錐形の移動経路を提供する。これは、より大きいオブジェクトを、削減することなく再構成することを可能にするが、サンプルの完全な回転を提供するシステムと同じような完全なデータ・セットを提供するものではない。
【0041】
図3は、本発明によるシステムの電子要素及び制御要素の概略図である。システムの機械部品は、図2A−図2Cを参照して説明される通りである。本システムは、画像形成されるターゲット・オブジェクトのための支持部の動き、及び、対応する検出器の動きの両方を制御するように動作可能なモーション・コントローラ又はサーボ・システム40を含む。前述のように、本システムは、支持面をX方向に移動させるためのモータ41と、支持面をY方向に移動させるためのモータ42と、支持面をZ方向に移動させるためのモータ43とを含む。検出器の移動は、検出器が取り付けられる弓状フレームをピボット運動させるように動作可能なモータ44、及び、弓状フレーム上の軌道に沿って検出器を移動させるように構成されたモータ45によって達成される。
【0042】
モーション・コントローラ40は、専用マイクロプロセッサ又は適切にプログラムされたPCなどの汎用コンピュータとすることができる、プロセッサ48に接続される。以下でより詳細に説明されるように、プロセッサ48は命令をモーション・コントローラ40に送り、次いで、モーション・コントローラ40が制御信号をモータ41−45に送る。
【0043】
プロセッサ48はまた、x線源46のアクティブ化及び非アクティブ化を制御するように構成される。
【0044】
プロセッサ48はx線検出器47からの出力信号を受信し、対応する画像をディスプレイ50に送る。インターフェース51は、ユーザが画像キャプチャ・プロセスをアクティブ化すること、並びに、プロセッサの動作においてパラメータを構成すること、そして、サンプルの一部を対象領域として選択することを可能にするために提供される。動作中、検出器は画像データをプロセッサに連続的に供給するので、検出器の視野をディスプレイ51上に連続的に表示することができる。
【0045】
図3に示されるように、プロセッサ48は、メモリ49を含むことができる。代替的に又はこれに加えて、プロセッサに接続された外部デバイス内にメモリを設けることができる。図3は、プロセッサ48に接続することができ、メモリ及び画像処理機能を与えるように構成することができる外部コンピュータ52を点線で示している。画像キャプチャ機能に加えて、別個のプロセッサ上で画像処理機能が実行されることは有利であり、その結果、1つの対象領域に関する画像処理を、次の対象領域に対する画像キャプチャと同時に実行することができる。
【0046】
図6及び図7を参照してより詳細に説明されるように、プロセッサ48は、単一の対象領域の複数の投影をキャプチャするために、x線源10、支持部12、及び検出器14の動作を制御し、連係させるように構成される。特定の対象領域の複数の投影を、異なる対象領域及び検出位置で撮ることにより、その対象領域に関する投影の集積をなすことができる。次いで、トモシンセシス・アルゴリズムを使用して集積を処理し、対象領域の三次元モデルを生成することができる。411 Borel Avenue、Suite 550、San Mateo、CA94402、米国のPrexion Inc.により提供されるReconPro再構成ソリューションなどの、種々のトモシンセシス・アルゴリズム及び処理技術が、当技術分野において周知である。
【0047】
複数の画像を用いて三次元モデルを生成するための要件は、各画像についてのx線源、対象領域、及び検出器の間の正確な空間関係の知識である。実際には、このことは、有用な結果を得るために、高価な機械を使用することを意味していた。高い費用は、特に、対象領域及び検出器のための移動機構の部品の全てに必要とされる非常に厳しい公差に起因するものである。
【0048】
本発明では、この問題は、基準マーカーを使用することにより克服される。次いで、画像処理技術を用いて、キャプチャされた画像を、それらの画像の見え方が正確に位置決めされた部品に対応するように変更する。システムの可動部品の正確な制御の代わりに、キャプチャされた画像に修正を施して1組の修正された画像を提供し、次いで、トモシンセシス・アルゴリズムを用いて、修正された画像を結合し、三次元モデルを生成する。
【0049】
基準マーカーは、ターゲット・オブジェクト上に既に存在する要素の形を取ることができ、又は、画像形成プロセスに先立って、ターゲット・オブジェクトに固定された、若しくは、ターゲット・オブジェクトが取り付けられる支持部上にターゲット・オブジェクトの付近に取り付けられた要素とすることができる。
【0050】
図4は、回路基板上の例示的な対象領域を示す。この特定の対象領域は、集積回路部品60と、部品を下にある集積回路基板に結合するのに用いられる複数のはんだボールを含むボール・グリッド・アレイ61とを含む。別の対象領域は、例えば1つ又は2つのはんだボールを含む、ずっと小さいものとすることができる。はんだボール61は、球形状を有すると考えることができるので、有効な基準マーカーとして使用することができる。基準マーカーとして、1つ、2つ、又はそれ以上のはんだボールを使用することができる。実際には、はんだボールは完全に球形ではないので、幾つかのはんだボールを使用することは有益である。複数のはんだボールを基準マーカーとして使用することにより、はんだボールの不完全な対称性と関連した如何なるエラーも低減される。ターゲット・オブジェクト上の他の既存の部品が既知の幾何学的形状を有し、その幾何学的形状をシステムにより実行される画像処理プロセス内に適合させ得る場合には、これらの部品を使用することができる。PCB又は半導体パッケージ内のビアは、はんだボールと非常によく似た特性を有する。さらに、Quad−Flat No−Leadパッケージなどの、より複雑であるが予測可能な幾何学的形状の部品を用いることもできる。
【0051】
代替的に、その目的のために設計された基準マーカーを使用することができる。これらの基準マーカーを、ターゲット・オブジェクト又はターゲット・オブジェクトに近接した支持部に取り付けることができる。図5a乃至図5eは、幾つかの例示的な基準マーカーの形状を示す。基準マーカーは、用いられる典型的なエネルギー・レベルにおいてx線を通さないいずれかの適切な材料から形成することができる。使用される基準マーカーの規模は、視野及び検査されるオブジェクトに対して適切なものである必要があり、従って、x線機器又はソフトウェア・パッケージと併せて、種々の異なるサイズの基準マーカーを提供することができる。
【0052】
図5a、図5b、及び図5cにおける基準マーカーは、ほぼ平坦なマーカーであるが、これらは幾らかの高さを有している。これらは対象領域の部品と類似したx線吸収を有するように形成され、従って、これらは対象領域内の部品と類似した密度、材料特性、及び厚さを有することができる。有利なことに、対象領域を不明瞭にするのを最小限にするために、これらは可能な限り低い高さを有するように形成される。
【0053】
図5d及び図5eにおける基準マーカーは、球状のマーカーである(これらは同様に円盤状とすることができる)。直径が100μmから0.8mmまでの間の適切な球状マーカーは、器械類に使用されるベアリングの供給業者から入手することができる。これらのベアリングは、はんだボールより完全な球状であり、従って、より良好な基準マーカーとなる。
【0054】
説明されるように、基準マーカーは、画像形成された対象領域の範囲内にあってもよく、又は画像形成された対象領域の外にあってもよい。どちらの構成が用いられても、基準マーカーは、各々の投影内で認識可能でなければならない。この認識は、プロセッサ上で実行されるソフトウェアに組み込まれた画像認識技術を用いて自動的に行われる。基準マーカーの予測される画像を、1 Vision Drive、Natick、MA01760−2059、米国のCognex CorporationのVisionProソフトウェア製品によって提供されるような相関手法を用いて、画像形成された対象領域内の基準マーカーのキャプチャされた画像と比較することができる。このソフトウェアは、放射線源と検出器との間の基準マーカーの所定位置における、基準マーカーの予測された画像とキャプチャされた画像との間の変換を計算する。次いで、その変換を、その所定位置における対象領域のキャプチャされた画像に適用して、その所定位置に関する対象領域の修正された画像を生成することができる。
【0055】
図2A−図2C及び図3に示されるシステムの部品を説明し、図5における幾つかの基準マーカーの例を示したが、例示的な動作方法が、図6及び図7を参照して説明される。
【0056】
図6は、基準マーカーが対象領域の範囲内にある、画像形成方法のステップを示す。ステップ600においてプロセスが開始された後で、ステップ605において、ユーザは、x線管を加速する電圧及び電力、撮られる投影(即ち、画像)の数、画像が撮られるときに検出器14(及び支持部12)が移動する垂直面からの角度範囲、及び倍率といった種々の動作パラメータを選択することができる。図2A−図2Cに見られるように、検出器は半球の周囲を移動することができ、原則的に、その半球上のいずれかの位置において検出器を有する状態で投影を撮ることができる。検出器が位置する垂直面からの角度が大きいほど、対象領域についてより多くの情報を取得することができる。しかしながら、実際上、検出器が移動する垂直面からの角度を制限することが望ましい。これは、より大きい角度においては、x線が対象領域に到達する前に(場合によっては、到達した後に)、より多くの外部部品を通って移動するためである。従って、ユーザは、外部のオブジェクトにより生成される投影内のノイズが大きな角度の利点を上回る前に、最大の角度を用いてバランスを見出さなければならない。これは、主にターゲット・オブジェクトのトポグラフィによって決まる。画像処理を簡略化するために、説明される実施形態における検出器は、対象領域の上方のx−y面内の円上の位置に移動するように制約され、その結果、全ての投影が、垂直面に対して同じ角度で撮られる。
【0057】
ユーザはまた、撮られる投影の数も選択し、その選択は、時間の制約と最終的な三次元モデルにおける必要とされる詳細との間のバランスとすることができる。いずれの数も用い得るが、典型的には、それは12投影から720投影までの間である。
【0058】
例えば、ユーザが、撮られる72個の投影、垂直面から30°の角度、及び特定の倍率を選択した場合、プロセッサは、これらのパラメータに従って、x線源10、支持部12、及び検出器14に関して72個の異なる相対位置を計算する。結果は、支持部12及び検出器14の初期位置、並びに、支持部12及び検出器14が、x線源に対して30°の円錐角を定める円形路の周りに等しく離間配置されるように移動される71個の異なる位置となる。71個の位置は、これを通って支持部12及び検出器14が移動される所定位置とすることができる。第1の画像が記録される前のどの時点でも、プロセスの後半でこれらのパラメータの一部又は全てを選択又は調整できることは明らかである。
【0059】
ステップ610において、対象領域内に既に存在する要素を基準マーカーとして用いるか、それとも対象領域内のターゲット・オブジェクト上に基準マーカーを取り付けるかについての判断をしなければならない。ターゲット・オブジェクト上に既に存在する要素が基準マーカーとして用いられる場合、ステップ620において、プロセスが続行する。外部から与えられる基準マーカーが必要とされる場合、ステップ615において、このマーカーをターゲット・オブジェクトに取り付ける。画像形成プロセスの間、基準マーカーを対象領域に対して所定の位置に固定された状態で保持するのに十分な、いずれかの適切な固定技術を用いることができる。
【0060】
ステップ620において、ユーザは、検出器の視野を選択しなければならない。説明されるように、視野は、ターゲット・オブジェクトの対象領域を含まなければならない。視野が対象領域より大きいことが好ましいが、もたらされる三次元モデルの品質は視野の中央において最大であり、対象オブジェクトの一部を全ての投影において見ることができないコーナー部及び縁部においては比較的低品質であるので、対象領域の良質な三次元モデルに必要であるよりも大きくはないことが好ましい。視野は、カーソルを用いて視野の周りに視覚を描くことによるなど、ユーザ・インターフェースを用いてスクリーン上で選択することができる。視野の選択は、典型的には、x線源の真上又は垂直方向上方の検出器及び対象領域に対して行われる。ひとたび視野が選択されると、ユーザからのユーザ・インターフェース51を通じた入力により、プロセッサ48が、コマンド信号をモーション・コントローラ40に送る。これに応答して、モーション・コントローラ40は、選択された視野を表示するように、コマンド信号に従って検出器14及び支持部12の位置を調整する。ユーザは引き続き、視野が所望の通りになるまで、検出器14及び支持部12の位置を調整することができる。
【0061】
視野を選択すると、ステップ625において、基準マーカーを特定しなければならない。本実施形態において、基準マーカーは対象領域内に、従って、選択された視野内にある。基準マーカーを選択するために、ここで検出器及び支持部が、x線源の真上又は垂直方向上方の位置から初期位置に移動され、それにより検出器及び支持部は、第1の投影のために垂直面からの所望の角度に配置される。基準マーカーは、ユーザ・インターフェースを用いてスクリーン上で選択される。ユーザは、カーソルを用いて、又はディスプレイ上の視野の部分の周囲にボックスをドラッグして、基準マーカーを特定することができる。支持部12及び検出器14がこれらの初期位置にある状態で、次に、ステップ630において、対象領域を含む視野の第1の画像が検出器により記録され、メモリ49内に格納される。ユーザにより基準マーカーとして選択された画像の部分もまた、メモリ49内に格納される。基準マーカーの画像及び位置は、検出器により記録されるその後の投影の各々における1つ又は複数の基準マーカーの予測される画像を計算するための基礎として用いられる。システムは基準マーカーの幾何学的形状及び位置と、各々の投影における支持部及び検出器の所定位置を知っている。この情報を用いて、所定位置の各々において撮られる投影における基準マーカーの予測される画像及び位置を計算することが可能である。
【0062】
次いで、各々の位置における対象領域及び基準マーカーの画像を記録するために、所定位置の各々を通って支持部12及び検出器14を移動させる必要がある。前述のように、各々の投影に関する支持部12及び検出器14の位置は、ユーザが設定したパラメータに基づいてプロセッサ48により計算される。前述の例においては、ユーザは、撮られる72個の投影、検出器についてのx線源の垂直方向上方から30°の角度、及び特定の倍率を選択し、次いで、プロセッサは、これらのパラメータに従って、x線源10、支持部12、及び検出器14についての72個の異なる相対位置を計算した。ステップ635、640、及び645において、モーション・コントローラは、支持部12及び検出器14を残りの71個の所定位置の各々に連続的に移動させ、検出器14は、各々の位置における対象領域及び基準マーカーを含む視野の画像を記録する。モーション・コントローラは、インクリメント信号をサーボ・モータ42−45に送り、支持部及び検出器を順に次の位置に移動させる。ステップ640及び645は、必要な画像の全てが記録されるまで繰り返される(図6は、ステップ640及び645がn回繰り返されることを示す)。必要な画像の全てが記録された後、信号がステップ640からステップ660に送られ、対象領域の修正された画像から対象領域の3Dモデルを生成する。
【0063】
基準マーカーの予測される画像の計算が、ステップ650として示される。既述のように、投影ごとのx線源、対象領域、及び検出器の間の所望の空間関係は、ユーザが設定したパラメータに基づいて計算される。従って、この空間関係、並びに基準マーカーの幾何学的形状及び位置の知識に基づいて、位置ごとに、基準マーカーの予測される画像及び位置を計算することができる。この例では、基準マーカーは、垂直軸を中心に回転対称を有し、検出器はx線源に対して固定された円錐角の円形路の周りに移動するように制約され、その結果、基準マーカーは、各々の投影において同じサイズ及び形状に見え、視野内でのその位置のみが変わるように推定される。しかしながら、基準マーカーは、必要に応じて、より複雑な幾何学的形状を有し得る。次いで、その幾何学的形状の記述は、プロセッサにより実行される画像処理計算において、パラメータとして含まれる。
【0064】
ステップ650における基準マーカーの予測される画像の計算は、画像キャプチャ・ステップ635乃至645と同時に又は連続して実行することができる。ステップ650はまた、図3を参照して説明されたように、画像キャプチャ処理とは別個のプロセッサ52上で実行してもよい。
【0065】
ステップ655において、所定位置の各々について、基準マーカーの予測される画像の各々を、基準マーカーの対応するキャプチャされた画像と比較する。所定位置の各々について、プロセッサ48(又は52)は、基準マーカーのキャプチャされた画像を予測される画像にマッピングするための変換を計算する。このことは、画像からの相関又はエッジ抽出により基準マーカーの具体的な特徴又は基準マーカーの位置を識別し、それらの空間関係を見つけ出すことにより為される。次いで、所定位置の各々についてのこの変換を、その所定位置における対象領域のキャプチャされた画像に適用して、その所定位置における対象領域についての修正された画像を生成する。修正された画像は、事実上、位置決め機構が支持部及び検出器を所望の通りに正確に位置決めできた場合にキャプチャプされた画像となる。
【0066】
全ての所定位置に関する対象領域の画像が修正されると、ステップ640からの信号に応答して、ステップ660において修正された画像を結合し、対象領域の三次元モデルを生成する。これらの画像は、上記で参照したPrexion Inc.により提供されるReconPro再構成ソリューションのようなトモシンセシス・アルゴリズムを用いて結合することができる。
【0067】
次いで、三次元モデルは、ユーザによるディスプレイ50上での閲覧に利用可能にされ、接合部におけるボイド形成のレベル及び不完全なはんだ接合といった欠陥を探すために、ユーザ・インターフェース51を用いて、ユーザにより閲覧するように、モデルを通る異なるスライスを選択することができる。この欠陥分析は、製造プロセスの最適化のためにも、製造品目が一貫したままであり、品質閾値を満たしていることをチェックすることによるプロセス制御のためにも有用である。
【0068】
図7は、図6に示される方法の変更を示し、これは、対象領域の外部にある基準マーカーの使用を可能にする。例えば対象領域が電子部品で密に覆われている場合、基準マーカーを対象領域の外部に、しかし、同じ基板上又は支持部上に直接配置することができる。図7の実施形態における方法は、図6に示される同じ開始ステップ600乃至620を含む。図7は、本方法における後のステップのみを示す。ステップ700において、基準マーカーをユーザにより特定しなければならない。このことは、ステップ620において対象領域に関して選択された視野から基準マーカーを囲む視野に、検出器の視野を変更することを必要とする。これを行うために、ユーザ・インターフェース51及びスクリーン50を用いて、ユーザは、検出器14が静止状態のままにしながら、支持部12の動きを制御する(理想的には、倍率が変わらないように同じXY面内で)。支持部は、所望の基準マーカーが視野内にあり、理想的にはスクリーンの中央にある位置まで移動される。次いで、基準が対象領域の視野内にある場合に上述されたように、検出器及び支持部は、x線源の真上又は垂直方向上方の位置から初期位置に移動され、それにより検出器及び支持部は、第1の投影のための垂直面からの所望の角度で配置される。次いで、カーソルを用いて、又はスクリーン上の基準の画像の周囲にボックスをドラッグして、基準が特定される。
【0069】
上記のプロセス中、対象領域に関する視野のx及びy位置に対する、基準に関する視野のx及びy位置が格納される。次に、x及びyオフセット信号としてメモリ内に格納できるこれらのx及びy位置は、x及びyモータ41、42の制御下で、後で、対象領域に関する視野の位置と基準マーカーに関する視野の位置との間で支持部を移動させるのに用いることができる。
【0070】
次いで、画像キャプチャ・プロセスは、検出器及び対象領域の所定位置の各々について、対象領域を含む視野の画像を記録し、次に基準マーカーを含む視野の画像を記録することによって進行する。ステップ705において、第1の所定位置について、対象領域の画像を記録する。次いで、ステップ710において、x線源に対して検出器を静止状態に保持しながら、基準が第1の所定位置に来るように、格納されたx及びyオフセット信号を用いて、支持部が移動される。次いで、ステップ715において、基準を含む視野の第1の画像が記録される。ステップ700は、前もってではなく、ステップ710の後に実行することができ、実際上、これはユーザにとってより好都合であり得ることを認識すべきである。また、対象領域及び検出器の所定位置の各々について、対象領域の後ではなく、その前に基準マーカーを画像形成できることも認識すべきである。
【0071】
ステップ720において、検出器及び支持部(即ち、対象領域)の両方が、対象領域の次の投影に対応する次の所定位置に移動される。ステップ725において、この次の所定位置において、対象領域を含む視野の画像が記録される。ステップ730において、対象領域の画像が記録されたばかりの所定位置に基準が配置されるまで、検出器をx線源に対して静止状態に保持しながら、XYオフセット信号を用いて支持部が移動される。ステップ735において、この所定位置における基準マーカーを含む視野の画像が記録される。次いで、プロセスはステップ720に戻り、対象領域及び検出器の所定位置の各々について、対象領域の画像及び基準マーカーの画像がキャプチャされるまで、ステップ720乃至735が繰り返される。以下で説明されるように、全ての所定位置について画像がキャプチャされた後、信号をステップ722からステップ752に送って、三次元モデルを生成する。
【0072】
ステップ740において、図6を参照して説明されたのと同じ方法で、基準マーカーの予測される画像の計算が実行される。ステップ745において、所定位置の各々について、基準マーカーの予測される画像の各々が、基準マーカーの対応するキャプチャされた画像と比較され、キャプチャされた画像の各々について変換を計算し、キャプチャされた画像を予測される画像にマッピングする。図6を参照して説明されたのと同じ技術を用いることができる。次いで、所定位置の各々に関する変換を、対象領域の対応するキャプチャされた画像に適用して、所定位置の各々に関する対象領域の修正された画像を生成する。第1の画像に続く各々の投影について、対象領域の修正された画像を生成する。前述のように、ステップ750において、ステップ720から、全ての所定位置に関する画像がキャプチャされたとの信号を受信すると、次いで、ステップ750において、第1の画像及びその後の修正された画像がトモシンセシス・アルゴリズムにおいて結合され、対象領域の三次元モデルを生成する。
【0073】
支持部の移動が反復可能である場合、対象領域及び基準マーカーを別々に画像形成することは、比較的不正確な位置決め機構において実用的である。従って、対象領域の所定位置に基準マーカーを移動させる都度、正確に支持部を動かすことは不可能であるが、制御信号は同じであり、結果として生じる動きも同じである。ステップ730に関して、支持部が静止状態である間、対象領域と基準マーカーの間で移動されるのは、支持部ではなく検出器とすることができることを認識すべきである。図2に示される機構においては、支持部の動きの方がより反復可能であるため、検出器を静止状態に保ち、支持部を移動させることが好ましい。しかしながら、異なる機械構成では、これが当てはまらない場合もあり得る。
【0074】
本発明は特定の実施形態を参照して説明されたが、同じ発明概念を用いながら、本システム及び方法に対して多数の変更を行うことができることは明確であるはずである。例えば、ターゲット・オブジェクト及び検出器を移動させるために、異なるシステムを使用してもよく、異なるシステムは、結果として得られるキャプチャされた画像に異なるエラーを導入する。用いられるシステムに関わりなく、適切な基準マーカーの使用により、修正された画像を生成することが可能になる。
【符号の説明】
【0075】
10、46:x線源
12:支持部
12a:Yテーブル
12b:Xテーブル
14、47:検出器
16:領域
20:フレーム
21:脚部
25:ビーム
26:支持プレート
30:ベアリング
31:弓状フレーム
32:釣り合い重り
33:軌道
40:モーション・コントローラ(サーボ・システム)
41、42、43、44、45:モータ
48:プロセッサ
49:メモリ
50:ディスプレイ
51:インターフェース
52:外部コンピュータ(プロセッサ)
60:集積回路部品
61:ボール・グリッド・アレイ(はんだボール)
76、82:シャフト
90:クロスビーム
96:チーク
【特許請求の範囲】
【請求項1】
ターゲット・オブジェクト上の対象領域の三次元表現を生成する方法であって、
a)前記ターゲット・オブジェクトの前記対象領域において、又は前記対象領域に対して固定された可動表面上に、既知の幾何学的形状の基準マーカーを特定するステップと、
b)前記対象領域及び前記基準マーカーが放射線源に対して第1の位置にあり、検出器が前記放射線源に対して第1の検出位置にあるときに、前記検知器により前記放射線源からの放射線を検出することにより、前記基準マーカーの第1の画像及び前記対象領域の第1の画像を作成するステップと、
c)前記基準マーカー及び前記対象領域を、前記放射線源に対して第2の位置に移動させ、前記検出器を前記放射線源に対する第2の検出位置に移動させるステップと、
d)前記対象領域及び前記基準マーカーが前記放射線源に対して前記第2の位置にあり、前記検出器が前記放射線源に対して前記第2の検出位置にあるときに、前記検出器により前記放射線源からの放射線を検出することにより、前記基準マーカーの第2の画像及び前記対象領域の第2の画像を作成するステップと、
e)前記基準マーカーの前記第2の画像と前記基準マーカーの予測される第2の画像に関する情報との比較を用いて、前記対象領域についての修正された第2の画像データを生成するステップと、
f)前記第1の画像又は修正された第1の画像データ、及び前記対象領域に関する前記修正された第2の画像データを用いて、前記対象領域の三次元表現を生成するステップと、
を含むことを特徴とする方法。
【請求項2】
前記方法は、前記対象領域又は前記可動表面上に基準マーカーを配置するステップを含むことを特徴とする、請求項1に記載の方法。
【請求項3】
前記基準マーカーは、前記対象領域の各画像内にあることを特徴とする、請求項1に記載の方法。
【請求項4】
前記基準マーカーの各画像は、前記対象領域の各画像とは別個のものであり、前記基準マーカーの第1の画像及び前記対象領域の第1の画像を作成するステップは、前記対象領域及び前記基準マーカーを前記第1の位置に連続的に移動させる間、前記検出器を第1の検出位置に保持するステップを含むことを特徴とする、請求項1〜請求項2のいずれかに記載の方法。
【請求項5】
前記基準マーカーの第2の画像及び前記対象領域の第2の画像を作成するステップは、前記基準マーカーの第1の画像を作成し、前記対象領域の第1の画像を作成するステップの後に実行されることを特徴とする、請求項4に記載の方法。
【請求項6】
前記対象領域及び前記基準マーカーが前記放射線源に対して第3の位置にあり、前記検出器が前記放射線源に対して第3の検出位置にあるとき、前記検出器により前記放射線源からの放射線を検出することにより、前記基準マーカーの第3の画像及び前記対象領域の第3の画像を作成するステップと、
前記基準マーカーの前記第3の画像と前記基準マーカーの予測される第3の画像に関する情報との比較を用いて、前記対象領域についての修正された第3の画像データを生成するステップと、
をさらに含み、
前記対象領域の三次元表現を前記生成するステップは、前記修正された第3の画像データを用いることを特徴とする、請求項1〜請求項5のいずれか1記載の方法。
【請求項7】
前記基準マーカーは複数の基準マーカー要素を含むことを特徴とする、請求項1〜請求項6のいずれかに記載の方法。
【請求項8】
前期基準マーカーの前記予測される第2の画像は、前記基準マーカー又は前記基準マーカー要素の各々が回転対称を有するとの推定に基づいて計算されることを特徴とする、請求項1〜請求項7のいずれかの記載の方法。
【請求項9】
ターゲット・オブジェクト上の対象領域の三次元表現を生成するシステムであって、
x線源と、
前記ターゲット・オブジェクト及び既知の幾何学的形状の基準マーカーを支持するように構成された支持部、及び前記支持部を移動させるように構成された支持部搬送機構と、
x線検出器、及び前記検出器を移動させるように構成された検出器搬送機構と、
前記支持部搬送機構及び前記検出器搬送機構に接続されたモーション・コントローラと、
を含み、前記モーション・コントローラは、コマンド信号を前記支持部搬送機構に与えて前記対象領域及び前記基準マーカーを第1の位置から第2の位置に移動させ、かつ、コマンド信号を前記検出器搬送機構に与えて前記検出器を第1の検出位置から第2の検出位置に移動させるように構成され、前記対象領域及び前記基準マーカーが前記第1の位置にあり、前記検出器が前記第1の検出位置にあって前記検出器が第1の位置の画像情報を生成するとき、及び、前記対象領域及び前記基準マーカーが前記第2の位置にあり、前記検出器が前記第2の検出位置にあって前記検出器が第2の位置の画像情報を生成するとき、前記x線源からのx線が前記対象領域及び前記基準マーカーを通って前記検出器に伝送され、
前記検出器から前記第1の位置の画像情報及び前記第2の位置の画像情報を受信し、前記第1の位置の画像情報を用いて、前記対象領域の第1の画像及び前記基準マーカーの第1の画像を生成し、かつ、前記第2の位置の画像情報を用いて、前記対象領域の第2の画像及び前記基準マーカーの第2の画像を生成するように構成された、前記検出器に結合された画像プロセッサが設けられ、前記画像プロセッサは、
前記第2の位置における前記基準マーカーの予測される画像を計算し、
前記第2の位置における前記基準マーカーの前記予測される画像と、前記基準マーカーの前記第2の画像との比較を用いて、前記対象領域の修正された第2の画像を生成し、
前記対象領域の前記第1の画像、又は前記対象領域の前記第1の画像についての修正された画像データ、及び前記対象領域の前記修正された第2の画像を用いて、前記対象領域の三次元表現を生成する、
ように構成されることを特徴とするシステム。
【請求項10】
前記検出器からの信号に基づいた画像データを表示するように構成された視覚ディスプレイと、ユーザ・インターフェースとをさらに含み、前記ユーザ・インターフェースは、ユーザが、前記ディスプレイ上の画像内から基準マーカーを選択することを可能にするように構成されることを特徴とする、請求項9に記載のシステム。
【請求項11】
前記検出器搬送機構は、前記検出器が結合されるピボット運動可能な弓状の軌道を含むことを特徴とする、請求項9〜請求項10のいずれかに記載のシステム。
【請求項12】
前記支持部搬送機構は、前記支持部が、3つの直交方向に独立して移動するのを可能にするように構成されることを特徴とする、請求項9〜請求項11のいずれかに記載のシステム。
【請求項13】
x線画像形成装置と共に用いるためのコンピュータ可読ストレージ媒体であって、前記x線画像形成装置は、x線源と、対象領域及び既知の幾何学的形状の基準マーカーのための支持部を移動させる支持部搬送機構と、x線検出器と、前記検出器を移動させるように構成された検出器搬送機構と、前記支持部搬送機構及び前記検出器搬送機構に接続されたモーション・コントローラとを含み、前記モーション・コントローラは、コマンド信号を前記支持部搬送機構に与えて前記対象領域及び前記基準マーカーを第1の位置から第2の位置に移動させ、かつ、コマンド信号を前記検出器搬送機構に与えて前記検出器を第1の検出位置から第2の検出位置に移動させるように構成され、前記対象領域及び前記基準マーカーが前記第1の位置にあり、前記検出器が前記第1の検出位置にあるとき、及び、前記対象領域及び前記基準マーカーが前記第2の位置にあり、前記検出器が前記第2の検出位置にあるとき、前記x線源からのx線が前記対象領域及び前記基準マーカーを通って前記検出器に伝送され、前記コンピュータ可読ストレージ媒体は、前記x線画像形成装置に接続されたコンピュータ・プロセッサによって実行されるときに、前記コンピュータ・プロセッサに、
対象領域及び基準マーカーを選択するようにユーザに要求し、
受信した画像データに基づいて、前記第1及び第2の位置における前記対象領域及び前記基準マーカーの画像を生成させ、
前記第2の位置における前記基準マーカーの予測される画像を生成させ、
前記第2の位置における前記基準マーカーの前記予測される画像と、前記第2の位置における前記基準マーカーの前記画像との比較を用いて、前記第2の位置における前記対象領域についての修正された画像データを生成させ、
前記第1の位置における前記対象領域の画像、又は前記第1の位置における前記対象領域についての修正された画像データ、及び前記第2の位置における前記対象領域についての前記修正された画像データを用いて、前記対象領域の三次元表現を生成させる、
実行可能命令を保持することを特徴とするコンピュータ可読ストレージ媒体。
【請求項14】
前記x線画像形成装置に接続されたコンピュータ・プロセッサによって実行されたときに、前記モーション・コントローラの動作を制御する、実行可能命令を保持することを特徴とする、請求項13に記載のコンピュータ可読ストレージ媒体。
【請求項15】
電子回路基板上への配置に適した1つ又はそれ以上の基準マーカーと組み合わされることを特徴とする、請求項13〜請求項14のいずれかに記載のコンピュータ可読ストレージ媒体。
【請求項1】
ターゲット・オブジェクト上の対象領域の三次元表現を生成する方法であって、
a)前記ターゲット・オブジェクトの前記対象領域において、又は前記対象領域に対して固定された可動表面上に、既知の幾何学的形状の基準マーカーを特定するステップと、
b)前記対象領域及び前記基準マーカーが放射線源に対して第1の位置にあり、検出器が前記放射線源に対して第1の検出位置にあるときに、前記検知器により前記放射線源からの放射線を検出することにより、前記基準マーカーの第1の画像及び前記対象領域の第1の画像を作成するステップと、
c)前記基準マーカー及び前記対象領域を、前記放射線源に対して第2の位置に移動させ、前記検出器を前記放射線源に対する第2の検出位置に移動させるステップと、
d)前記対象領域及び前記基準マーカーが前記放射線源に対して前記第2の位置にあり、前記検出器が前記放射線源に対して前記第2の検出位置にあるときに、前記検出器により前記放射線源からの放射線を検出することにより、前記基準マーカーの第2の画像及び前記対象領域の第2の画像を作成するステップと、
e)前記基準マーカーの前記第2の画像と前記基準マーカーの予測される第2の画像に関する情報との比較を用いて、前記対象領域についての修正された第2の画像データを生成するステップと、
f)前記第1の画像又は修正された第1の画像データ、及び前記対象領域に関する前記修正された第2の画像データを用いて、前記対象領域の三次元表現を生成するステップと、
を含むことを特徴とする方法。
【請求項2】
前記方法は、前記対象領域又は前記可動表面上に基準マーカーを配置するステップを含むことを特徴とする、請求項1に記載の方法。
【請求項3】
前記基準マーカーは、前記対象領域の各画像内にあることを特徴とする、請求項1に記載の方法。
【請求項4】
前記基準マーカーの各画像は、前記対象領域の各画像とは別個のものであり、前記基準マーカーの第1の画像及び前記対象領域の第1の画像を作成するステップは、前記対象領域及び前記基準マーカーを前記第1の位置に連続的に移動させる間、前記検出器を第1の検出位置に保持するステップを含むことを特徴とする、請求項1〜請求項2のいずれかに記載の方法。
【請求項5】
前記基準マーカーの第2の画像及び前記対象領域の第2の画像を作成するステップは、前記基準マーカーの第1の画像を作成し、前記対象領域の第1の画像を作成するステップの後に実行されることを特徴とする、請求項4に記載の方法。
【請求項6】
前記対象領域及び前記基準マーカーが前記放射線源に対して第3の位置にあり、前記検出器が前記放射線源に対して第3の検出位置にあるとき、前記検出器により前記放射線源からの放射線を検出することにより、前記基準マーカーの第3の画像及び前記対象領域の第3の画像を作成するステップと、
前記基準マーカーの前記第3の画像と前記基準マーカーの予測される第3の画像に関する情報との比較を用いて、前記対象領域についての修正された第3の画像データを生成するステップと、
をさらに含み、
前記対象領域の三次元表現を前記生成するステップは、前記修正された第3の画像データを用いることを特徴とする、請求項1〜請求項5のいずれか1記載の方法。
【請求項7】
前記基準マーカーは複数の基準マーカー要素を含むことを特徴とする、請求項1〜請求項6のいずれかに記載の方法。
【請求項8】
前期基準マーカーの前記予測される第2の画像は、前記基準マーカー又は前記基準マーカー要素の各々が回転対称を有するとの推定に基づいて計算されることを特徴とする、請求項1〜請求項7のいずれかの記載の方法。
【請求項9】
ターゲット・オブジェクト上の対象領域の三次元表現を生成するシステムであって、
x線源と、
前記ターゲット・オブジェクト及び既知の幾何学的形状の基準マーカーを支持するように構成された支持部、及び前記支持部を移動させるように構成された支持部搬送機構と、
x線検出器、及び前記検出器を移動させるように構成された検出器搬送機構と、
前記支持部搬送機構及び前記検出器搬送機構に接続されたモーション・コントローラと、
を含み、前記モーション・コントローラは、コマンド信号を前記支持部搬送機構に与えて前記対象領域及び前記基準マーカーを第1の位置から第2の位置に移動させ、かつ、コマンド信号を前記検出器搬送機構に与えて前記検出器を第1の検出位置から第2の検出位置に移動させるように構成され、前記対象領域及び前記基準マーカーが前記第1の位置にあり、前記検出器が前記第1の検出位置にあって前記検出器が第1の位置の画像情報を生成するとき、及び、前記対象領域及び前記基準マーカーが前記第2の位置にあり、前記検出器が前記第2の検出位置にあって前記検出器が第2の位置の画像情報を生成するとき、前記x線源からのx線が前記対象領域及び前記基準マーカーを通って前記検出器に伝送され、
前記検出器から前記第1の位置の画像情報及び前記第2の位置の画像情報を受信し、前記第1の位置の画像情報を用いて、前記対象領域の第1の画像及び前記基準マーカーの第1の画像を生成し、かつ、前記第2の位置の画像情報を用いて、前記対象領域の第2の画像及び前記基準マーカーの第2の画像を生成するように構成された、前記検出器に結合された画像プロセッサが設けられ、前記画像プロセッサは、
前記第2の位置における前記基準マーカーの予測される画像を計算し、
前記第2の位置における前記基準マーカーの前記予測される画像と、前記基準マーカーの前記第2の画像との比較を用いて、前記対象領域の修正された第2の画像を生成し、
前記対象領域の前記第1の画像、又は前記対象領域の前記第1の画像についての修正された画像データ、及び前記対象領域の前記修正された第2の画像を用いて、前記対象領域の三次元表現を生成する、
ように構成されることを特徴とするシステム。
【請求項10】
前記検出器からの信号に基づいた画像データを表示するように構成された視覚ディスプレイと、ユーザ・インターフェースとをさらに含み、前記ユーザ・インターフェースは、ユーザが、前記ディスプレイ上の画像内から基準マーカーを選択することを可能にするように構成されることを特徴とする、請求項9に記載のシステム。
【請求項11】
前記検出器搬送機構は、前記検出器が結合されるピボット運動可能な弓状の軌道を含むことを特徴とする、請求項9〜請求項10のいずれかに記載のシステム。
【請求項12】
前記支持部搬送機構は、前記支持部が、3つの直交方向に独立して移動するのを可能にするように構成されることを特徴とする、請求項9〜請求項11のいずれかに記載のシステム。
【請求項13】
x線画像形成装置と共に用いるためのコンピュータ可読ストレージ媒体であって、前記x線画像形成装置は、x線源と、対象領域及び既知の幾何学的形状の基準マーカーのための支持部を移動させる支持部搬送機構と、x線検出器と、前記検出器を移動させるように構成された検出器搬送機構と、前記支持部搬送機構及び前記検出器搬送機構に接続されたモーション・コントローラとを含み、前記モーション・コントローラは、コマンド信号を前記支持部搬送機構に与えて前記対象領域及び前記基準マーカーを第1の位置から第2の位置に移動させ、かつ、コマンド信号を前記検出器搬送機構に与えて前記検出器を第1の検出位置から第2の検出位置に移動させるように構成され、前記対象領域及び前記基準マーカーが前記第1の位置にあり、前記検出器が前記第1の検出位置にあるとき、及び、前記対象領域及び前記基準マーカーが前記第2の位置にあり、前記検出器が前記第2の検出位置にあるとき、前記x線源からのx線が前記対象領域及び前記基準マーカーを通って前記検出器に伝送され、前記コンピュータ可読ストレージ媒体は、前記x線画像形成装置に接続されたコンピュータ・プロセッサによって実行されるときに、前記コンピュータ・プロセッサに、
対象領域及び基準マーカーを選択するようにユーザに要求し、
受信した画像データに基づいて、前記第1及び第2の位置における前記対象領域及び前記基準マーカーの画像を生成させ、
前記第2の位置における前記基準マーカーの予測される画像を生成させ、
前記第2の位置における前記基準マーカーの前記予測される画像と、前記第2の位置における前記基準マーカーの前記画像との比較を用いて、前記第2の位置における前記対象領域についての修正された画像データを生成させ、
前記第1の位置における前記対象領域の画像、又は前記第1の位置における前記対象領域についての修正された画像データ、及び前記第2の位置における前記対象領域についての前記修正された画像データを用いて、前記対象領域の三次元表現を生成させる、
実行可能命令を保持することを特徴とするコンピュータ可読ストレージ媒体。
【請求項14】
前記x線画像形成装置に接続されたコンピュータ・プロセッサによって実行されたときに、前記モーション・コントローラの動作を制御する、実行可能命令を保持することを特徴とする、請求項13に記載のコンピュータ可読ストレージ媒体。
【請求項15】
電子回路基板上への配置に適した1つ又はそれ以上の基準マーカーと組み合わされることを特徴とする、請求項13〜請求項14のいずれかに記載のコンピュータ可読ストレージ媒体。
【図1】


【図2A】
【図2B】
【図2C】
【図3】
【図4】
【図5】
【図6】
【図7】
【図2A】
【図2B】
【図2C】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2013−96992(P2013−96992A)
【公開日】平成25年5月20日(2013.5.20)
【国際特許分類】
【出願番号】特願2012−236813(P2012−236813)
【出願日】平成24年10月26日(2012.10.26)
【出願人】(399018677)ノードソン コーポレイション (15)
【氏名又は名称原語表記】Nordson Corporation
【住所又は居所原語表記】28601 Clemens Road Westlake Ohio 44145−1119 USA
【Fターム(参考)】
【公開日】平成25年5月20日(2013.5.20)
【国際特許分類】
【出願日】平成24年10月26日(2012.10.26)
【出願人】(399018677)ノードソン コーポレイション (15)
【氏名又は名称原語表記】Nordson Corporation
【住所又は居所原語表記】28601 Clemens Road Westlake Ohio 44145−1119 USA
【Fターム(参考)】
[ Back to top ]