
画像形成装置、同装置における転写画像と用紙の位置合わせ補正方法及び補正プログラム

【課題】タイミングローラにより転写画像に対する用紙の位置合わせを行う際の電力消費を有効に抑制できる画像形成装置等を提供する。
【解決手段】用紙Mがタイミングローラ31、32に到達する際には、タイミングローラ駆動用モータ33への電力供給が遮断されている。タイミングローラ31、32に到達した用紙はタイミングローラで停止するが、用紙の先端部のニップ部からの飛び出し量Dが計測され、この計測された飛び出し量に基づいて、転写画像と用紙の少なくとも一方の他方に対する相対的位置が補正される。
【解決手段】用紙Mがタイミングローラ31、32に到達する際には、タイミングローラ駆動用モータ33への電力供給が遮断されている。タイミングローラ31、32に到達した用紙はタイミングローラで停止するが、用紙の先端部のニップ部からの飛び出し量Dが計測され、この計測された飛び出し量に基づいて、転写画像と用紙の少なくとも一方の他方に対する相対的位置が補正される。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、給紙部から搬送される用紙に転写される画像に対して前記用紙を位置合わせするためのタイミングローラを備えたMFP(Multi Function Peripherals) 等の画像形成装置、同装置における転写画像と用紙の位置合わせ補正方法、及び画像形成装置のコンピュータに前記位置合わせ補正方法を実行させるための位置合わせ補正プログラムに関する。
【背景技術】
【0002】
多機能デジタル画像形成装置であるMFP等の画像形成装置では、周知のように、給紙カセットから搬送される用紙に対して、例えば中間転写ベルト上の画像(トナ−画像)が適正位置に転写されるように、用紙搬送方向における転写位置上流側にステッピングモータないしはブラシレスモータで回転駆動されるタイミングローラが配備されており、タイミングローラ上流近傍のタイミングセンサで用紙が検出されると、タイミングローラで用紙を一旦停止させておき、転写後にタイミングローラの再起動のタイミングを制御するようになっている。
【0003】
具体的には、搬送された用紙をタイミングローラで一旦停止させる際に、用紙(とくに厚紙等)の先端がタイミングローラのニップ部から飛び出さないように、前記モータを励磁状態のままにしてタイミングローラに保持力(ホールド機能)を与え、該タイミングローラのニップ部に用紙の先端を当て込んで撓み(ループ)を作成することによりスキュー補正を行なっている。
【0004】
また、従来、タイミングローラの駆動を他の駆動から独立して制御可能にした複写機において、タイミングローラの駆動手段を定電流駆動方式のステッピングモータで構成するとともに、このステッピングモータをホールドする時の設定電流を、回転時の設定電流よりも高く設定する電流切り換え手段を設けることにより、電力消費を抑制し、さらに、タイミングローラの下流側に配備した転写紙検知センサにより、通過時から転写位置までの用紙の位置ずれを補正するようにした技術が提案されている(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開平9−235048号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかし、上述したように、用紙先端がタイミングローラのニップ部から飛び出さないようにホールド機能を作用させる場合、この間もタイミングローラの駆動モータが励磁されたまままになって電力が消費されてしまうといった問題があった。
【0007】
また、前記特許文献1に記載の技術においては、ホールド時よりも用紙搬送駆動時のステッピングモータの電流値を大きくし、換言すれば、ホールド時の電力消費を小さくしているが、ホールド機能のために電力が消費されていることには変わらない。
【0008】
この発明は、上記実情に鑑みてなされたものであり、タイミングローラにより転写画像に対する用紙の位置合わせを行う際の電力消費を有効に抑制できる画像形成装置、同装置における転写画像と用紙の位置合わせ補正方法、及び画像形成装置のコンピュータに前記位置合わせ補正方法を実行させるための位置合わせ補正プログラムを提供することを課題としている。
【課題を解決するための手段】
【0009】
上記課題は以下の手段によって解決される。
(1)給紙部から給紙された用紙を搬送する搬送ローラと、前記搬送ローラで搬送された用紙への画像の転写位置の上流側に設けられ、前記用紙を一旦停止させ、用紙へ転写される転写画像に対する用紙の位置合わせを行うタイミングローラと、前記タイミングローラを回転駆動するとともに、前記用紙がタイミングローラに到達する際には電力供給が遮断されているモータと、前記タイミングローラで停止した用紙の先端部のニップ部からの飛び出し量を計測する飛び出し量計測手段と、前記飛び出し量計測手段により計測された飛び出し量に基づいて、前記転写画像と用紙の少なくとも一方の他方に対する相対的位置を補正する補正手段と、を備えたことを特徴とする画像形成装置。
(2)前記補正手段は、飛び出し量計測手段により計測された飛び出し量に応じて、前記モータによるタイミングローラの起動タイミングを遅らせることにより、前記相対的位置を補正する前項1に記載の画像形成装置。
(3)前記補正手段は、飛び出し量計測手段により計測された飛び出し量に応じて、前記モータによるタイミングローラの起動時の回転速度を所定期間遅くすることにより、前記相対的位置を補正する前項1または2に記載の画像形成装置。
(4)前記補正手段は、飛び出し量計測手段により計測された飛び出し量に応じて、画像形成のための静電潜像の書き込み動作のタイミングを遅らせることにより、前記相対的位置を補正する前項1〜3のいずれかに記載の画像形成装置。
(5)前記飛び出し量計測手段は、前記モータの回転数を検知してパルスを出力するエンコーダで構成されている前項1〜4のいずれかに記載の画像形成装置。
(6)前記補正手段は、前記飛び出し量計測手段により計測された飛び出し量を、前記タイミングローラの耐久使用量に応じて補正する前項1〜5のいずれかに記載の画像形成装置。
(7)用紙の種類によって前記飛び出しの発生しない用紙を補正不要用紙とし、前記補正手段は、該補正不要用紙に対しては前記転写画像と用紙の位置合わせの補正を行わない前項1〜6のいずれかに記載の画像形成装置。
(8)前記補正手段は、前記補正不要用紙以外の用紙であっても、一定以上の高湿度条件である場合は、前記転写画像と用紙の位置合わせの補正を行わない前項7に記載の画像形成装置。
(9)前記飛び出し量計測手段は、用紙の種類が補正不要用紙である場合、該補正不要用紙に対して用紙飛び出し量の計測を行わない前項7または8に記載の画像形成装置。
(10)給紙部から給紙された用紙を搬送する搬送ローラと、前記搬送ローラで搬送された用紙への画像の転写位置の上流側に設けられ、前記用紙を一旦停止させ、用紙へ転写される転写画像に対する用紙の位置合わせを行うタイミングローラと、前記タイミングローラを回転駆動するモータと、を備えた画像形成装置における転写画像と用紙の位置合わせ補正方法であって、前記用紙がタイミングローラに到達する際には前記モータへの電力供給を遮断するステップと、前記タイミングローラで停止した用紙の先端部のニップ部からの飛び出し量を計測する飛び出し量計測ステップと、前記飛び出し量計測ステップにおいて計測された飛び出し量に基づいて、前記転写画像と用紙の少なくとも一方の他方に対する相対的位置を補正する補正ステップと、を備えたことを特徴とする画像形成装置における転写画像と用紙の位置合わせ補正方法。
(11)給紙部から給紙された用紙を搬送する搬送ローラと、前記搬送ローラで搬送された用紙への画像の転写位置の上流側に設けられ、前記用紙を一旦停止させ、用紙へ転写される転写画像に対する用紙の位置合わせを行うタイミングローラと、前記タイミングローラを回転駆動するモータと、を備えた画像形成装置のコンピュータに実行させるための転写画像と用紙の位置合わせ補正プログラムであって、前記用紙がタイミングローラに到達する際には前記モータへの電力供給を遮断するステップと、前記タイミングローラで停止した用紙の先端部のニップ部からの飛び出し量を計測する飛び出し量計測ステップと、前記飛び出し量計測ステップにおいて計測された飛び出し量に基づいて、前記転写画像と用紙の少なくとも一方の他方に対する相対的位置を補正する補正ステップと、を前記コンピュータに実行させる転写画像と用紙の位置合わせ補正プログラム。
【発明の効果】
【0010】
前項(1)に記載の発明によれば、用紙がタイミングローラに到達する際にはモータへの電力供給が遮断される。このため、タイミングローラのニップ部からの用紙の先端部が飛び出すことがあるが、該用紙の先端部の飛び出し量が用紙飛び出し量検出手段により計測され、この計測された飛び出し量に基づいて、前記転写画像と用紙の少なくとも一方の他方に対する相対的位置が補正される。
【0011】
つまり、用紙がタイミングローラに到達する際には、タイミングローラ駆動用モータを励磁するホールド機能を使わないので、ホールド電力が不要となりモータの電力消費が低減される。しかも、計測された飛び出し量に基づいて転写画像と用紙の少なくとも一方の他方に対する相対的位置が補正されるから、従来と同様に、用紙の適正位置に画像を転写できる。
【0012】
前項(2)に記載の発明によれば、計測された飛び出し量に応じて、モータによるタイミングローラの起動タイミングが遅延されるので、転写画像と用紙の少なくとも一方の他方に対する相対的位置を適正に補正できる。
【0013】
前項(3)に記載の発明によれば、計測された用紙の飛び出し量に応じて、モータによるタイミングローラの起動時の回転速度が所定期間遅くなるので、転写画像と用紙の少なくとも一方の他方に対する相対的位置を適正に補正できる。
【0014】
前項(4)に記載の発明によれば、計測された用紙の飛び出し量に応じて、画像形成のための静電潜像の書き込み動作のタイミングが遅延されるので、転写画像と用紙の少なくとも一方の他方に対する相対的位置を適正に補正できる。
【0015】
前項(5)に記載の発明によれば、用紙の飛び出し量計測手段がエンコーダであるから、エンコーダからのパルス数をカウントして飛び出し量を容易に判別でき、また、このエンコーダをモータに内蔵すれば、飛び出し量計測手段として、ラインセンサを導入するよりも、従来構造を生かせた簡素な構成で実施可能となる。
【0016】
前項(6)に記載の発明によれば、計測された用紙の飛び出し量がタイミングローラの耐久使用量によって補正されるので、タイミングローラの耐久使用量に左右されることなく、転写画像と用紙の少なくとも一方の他方に対する相対的位置をさらに適正に補正できる。
【0017】
前項(7)に記載の発明によれば、例えば普通紙等の飛び出しの発生しにくい補正不要用紙に対しては、転写画像と用紙の相対的位置の補正処理が無駄に実施されることはない。
【0018】
前項(8)に記載の発明によれば、補正不要用紙以外の用紙、例えば厚紙であっても、一定以上の高い湿度であれば、転写画像と用紙の相対的位置の補正処理は実施されない。
【0019】
前項(9)に記載の発明によれば、用紙が補正不要用紙であれば、エンコーダ等の飛び出し量計測手段で飛び出し量が計測されることはなく、無駄な計測動作の実施を防止できる。
【0020】
前項(10)に記載の発明によれば、用紙がタイミングローラに到達する際には、タイミングローラ駆動用モータを励磁するホールド機能を使わないので、ホールド電力が不要となりモータの電力消費が低減される。しかも、計測された飛び出し量に基づいて転写画像と用紙の少なくとも一方の他方に対する相対的位置が補正されるから、用紙の適正位置に画像を転写できる。
【0021】
前項(11)に記載の発明によれば、用紙がタイミングローラに到達する際には、タイミングローラ駆動用モータを励磁するホールド機能を使わず、しかも、計測された飛び出し量に基づいて転写画像と用紙の少なくとも一方の他方に対する相対的位置を補正する処理を、画像形成装置のコンピュータに実行させることができる。
【図面の簡単な説明】
【0022】
【図1】この発明の一実施形態に係る画像形成装置を示す概略構成図である。
【図2】同じく画像形成装置において、ステッピングモータの代わりにブラシレスモータを使用した例の概略構成図である。
【図3】同じく画像形成装置の電気的構成を示すブロック図である。
【図4】タイミングローラのニップ部からの用紙の飛び出し量を計測するエンコーダをタイミングローラ駆動用モータに内蔵した場合の、該モータの起動タイミングを遅延させる動作説明図である。
【図5】同じくエンコーダをタイミングローラに内蔵した場合の、タイミングローラ駆動用モータの起動タイミングを遅延させる動作説明図である。
【図6】(A)は、タイミングローラ駆動用モータの起動タイミングを遅延させる場合の時間・速度の特性図、(B)はタイミングローラ駆動用モータの起動時の速度を遅くする場合の時間・速度の特性図である。
【図7】感光体に対するレーザ光の発光タイミングを遅延させる場合の要部の動作説明図である。
【図8】転写画像と用紙の相対的位置の補正を行う場合に参考とする用紙種別と耐久係数との関係を示す表である。
【図9】タイミングローラの耐久回数と耐久係数αとの関係を示すグラフである。
【図10】画像形成装置で実施される転写画像と用紙の相対的位置の補正処理を示すフローチャートである。
【図11】転写画像と用紙の相対的位置の別の補正処理を示すフローチャートである。
【図12】転写画像と用紙の相対的位置のさらに別の補正処理を示すフローチャートである。
【図13】転写画像と用紙の相対的位置のさらに別の補正処理を示すフローチャートである。
【発明を実施するための形態】
【0023】
以下、この発明の実施形態を図面に基づいて説明する。
【0024】
図1は、この発明の一実施形態に係る画像形成装置を示す概略構成図である。
【0025】
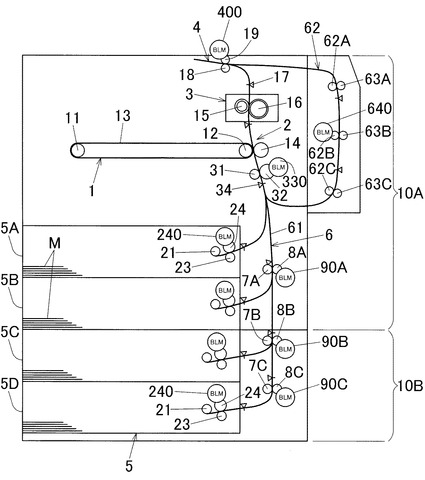
図1において、この画像形成装置は、本体10Aと給紙オプション10Bとを備えている。前記本体10Aは、プリント部1の一部を構成する転写部2と、定着部3と、排紙部4と、給紙部5の一部と、用紙搬送部6とを備えている。
【0026】
前記プリント部1は、図示しないスキャナ部で読み取られた原稿画像の画像データに従って感光体71(図7)上に形成された静電潜像をトナーで現像してトナー像を形成する他に、複数のローラ11、12に掛設されて回転する無端の中間転写ベルト13に感光体71上のトナー像を1次転写するようになっている。
【0027】
前記転写部2は、前記一方のローラ12に転接する転写ローラ14により、前記中間転写ベルト13のトナー像を用紙Mに2次転写するものである。
【0028】
前記定着部3は、少なくとも一方が加熱ローラからなる一対のローラ15、16を有しており、前記用紙Mに転写されたトナー像を加熱して定着するものである。
【0029】
前記排紙部4は、例えば、ステッピングモータ40で駆動される一対の排紙ローラ18、19を有し、前記定着部3を経た用紙Mを排紙トレイ(図示せず)に排紙するものである。この排紙ローラ18、19は、用紙の裏面にも印字する場合には、用紙Mの印字面を反転させるために該用紙Mを後述する用紙反転搬送部62に戻す反転ローラとして機能するように構成されている。
【0030】
なお、符号17は前記定着された用紙Mを検知する排紙センサである。
【0031】
前記給紙部5は、用紙Mを収容する複数(例えば4段)の給紙カセット5A、5B、5C、5Dを備えており、給紙カセット5A、5Bは、本体10A側に属し、他の給紙カセット5C、5Dは、給紙オプション10Bとなっている。
【0032】
各給紙カセット5A、5B、5C、5D内には、用紙Mを1枚づつ引き出すピックアップローラ21と、ピックアップローラ21で引き出された1枚の用紙Mを用紙搬送部6に給紙する給紙および捌きローラ22、23と、前記ピックアップローラ21と、給紙および捌きローラ22、23の一方とを駆動するステッピングモータ24とを備えている。
【0033】
前記用紙搬送部6は、前記給紙部5から給紙された用紙Mを前記排紙部4まで搬送する主搬送路61と、用紙Mの裏面にも印字する際に、排紙/反転ローラ18、19から戻された用紙Mの印字面を反転させて転写部2に搬送する用紙反転搬送路62とを備えている。
【0034】
前記主搬送路61には、各給紙カセット5B(5C、5D)に対応して、用紙Mに対する縦方向(上方向)搬送用の一対の搬送ローラ7A(7B、7C)、8A(8B、8C)がそれぞれ配備されている。
【0035】
これら搬送ローラ7A(7B、7C)、8A(8B、8C)は、ステッピングモータ9A(9B、9C)でそれぞれ回転駆動されるようになっており、各給紙ローラ21、22で給紙された用紙Mを搬送路61に沿って搬送するようになっている。
【0036】
前記用紙反転搬送路62は、一対3組の両面用搬送ローラ62A、63A(62B、63B)(62C、63C)が配置されており、これら搬送ローラ62A、63A(62B、63B)(62C、63C)は、ステッピングモータ64でそれぞれ回転駆動されるようになっている。
【0037】
また、前記主搬送路61には、転写部2の上流側近傍の位置に、一対のタイミングローラ31、32が配備されており、これらタイミングローラ31、32は、ステッピングモータ33で回転駆動されるようになっている。これらタイミングローラ31、32の上流側近傍には、搬送されてきた用紙Mを検出するタイミングセンサ34が配置されている。
【0038】
前記タイミングローラ31、32の駆動用モータ33は、用紙Mがタイミングローラ31、32に到達する際には、電力供給が遮断されて駆動停止状態となっている。また、起動時には、タイミングローラ31、32のニップ部からの用紙Mの先端の飛び出し量の計測値に応じて起動タイミングをずらして用紙の位置を補正し、あるいは起動速度を遅くして用紙の位置を補正することにより、用紙Mを転写画像に対して適正に位置決めするように構成されている。
【0039】
なお、前記給紙部5内のステッピングモータ24、搬送路61のステッピングモータ9A、9B、9C、排紙部4のステッピングモータ40、タイミングローラ用のステッピングモータ33、用紙反転搬送路62のステッピングモータ64は、これに限られるものではない。例えば、図2に示すように、給紙部5内のブラシレスモータ(BLMとも言う)240、搬送路61のブラシレスモータ(BLM)90A、90B、90C、排紙部4のブラシレスモータ400、タイミングローラ用のブラシレスモータ330、用紙反転搬送路62のブラシレスモータ64に変更することも可能であり、また、ブラシモータの採用も可能である。なお、図2において図1と同一の構成部分については同一の符号を付し、詳細な説明は省略する。
【0040】
図3は、同じく画像形成装置の電気的構成を示すブロック図である。
【0041】
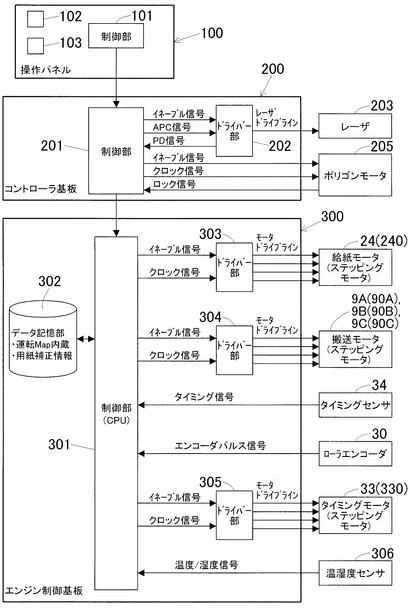
図3において、この画像形成装置は、操作パネル100と、コントローラ基板200と、エンジン制御基板300とを備えている。
【0042】
前記操作パネル100は、パネル制御部101と、各種のハードキーを具備したキー部102と、LCD等からなる表示部103とを備えており、これらキー部102や表示部103の動作は、制御部101で制御される。
【0043】
前記コントローラ基板200は、制御部201と、レーザ(図7参照)203に対するドライバー部(ドライバー部IC)202とを備えている。
【0044】
前記制御部201は、前記操作パネル100の制御部101から制御指示を受けて、前記ドライバー部202に対してイネーブル信号やAPC(自動出力コントロール)信号を送出するようになっている。
【0045】
前記ドライバー部202は、レーザ203を駆動するものであり、また、レーザ203は、感光体71の表面に対する露光用のレーザ光L(図7)を発射するものである。また、ドライバー部202からPD信号が制御部201に送出されるようになっている。
【0046】
また、前記制御部201は、レーザ光Lを走査するポリゴンミラー(図7)204の駆動用ポリゴンモータ(図7)205に対してイネーブル信号やクロック信号を送出して駆動を制御するようになっている。また、ポリゴンモータ205から制御部201に対してロック信号が送出されるようになっている。
【0047】
前記エンジン制御部300は、コントローラ基板200における制御部201から指示される制御部301と、記憶部302と、制御部301のCPUで制御されるドライバー部303、304、305を備えている。
【0048】
前記記憶部302は、例えば、ハードディスク装置(HDD)や半導体メモリ等からなり、各種データを記憶する他に、運転マップを内蔵したり、タイミングローラーから突出した用紙の補正等に関する用紙補正情報を記憶する手段である。
【0049】
前記制御部301のCPUは、前記ドライバー部303に対してイネーブル信号やクロック信号を送出するようになっている。
【0050】
前記ドライバー部303は、前記給紙部5内のモータ(ステッピングモータやブラシレスモータ)24、240を駆動する。
【0051】
また、制御部301は、前記ドライバー部304に対してイネーブル信号やクロック信号を送出するようになっている。
【0052】
前記ドライバー部304は、前記搬送用のモータ(ステッピングモータやブラシレスモータ)9A、90A、9B、90B、9C、90B等を駆動する。
【0053】
また、制御部301は、前記ドライバー部305に対してイネーブル信号やクロック信号を送出するようになっている。
【0054】
前記ドライバー部305は、前記タイミングローラ駆動用のモータ(ステッピングモータやブラシレスモータ)33、330を駆動する。
【0055】
なお、前記タイミングセンサ34は、タイミングローラ31、32に用紙Mが到達したのを検知してタイミング信号を制御部301に送出する。また、タイミングローラ駆動用モータ33(330)に内蔵されるエンコーダ(図4、図5に詳細を示す)30は、エンコーダパルス信号を制御部301に送出する。
【0056】
さらに、温湿度センサ306は、温度/湿度を検知して温度/湿度信号を制御部301に送出するようになっている。つまり、タイミングローラ31、32により用紙と画像との相対位置補正を行なう際に、補正不要用紙以外のもの、例えば厚紙の場合でも、一定以上の高湿度であれば、タイミングローラ31、32による画像位置補正が実施されないようになっている。
【0057】
上記構成の画像形成装置では、操作パネル100での操作情報が制御部101からコントローラ基板200の制御部201に送信され、これに基づいて該コントローラ基板200の制御部201からエンジン制御基板300の制御部301にエンジン制御情報が送信される。そして、その制御情報に基づいて制御部301内のCPUにより各負荷が制御される。
【0058】
制御部301内のCPUは、例えばユーザの設定モードに応じてシステムの速度を変更する(例えば、普通紙では165mm/s、厚紙では55mm/s)。
【0059】
また、制御部301内のCPUは、各モータドライバー部303(304、305)等に対してイネーブル信号と駆動速度に応じたクロック信号を送信することにより、給紙モータ24(240)、搬送モータ9A(90A)、9B(90B)、9C(90C)、タイミングローラ駆動用モータ33(330)等を所望の条件で動作させる。
【0060】
さらに、制御部301内のCPUは、タイミングセンサ34がOFFからONに切り替わることにより、タイミングローラ31、32に用紙Mが到達したことを検知し、一定時間後、搬送ローラ7A、8A・・・等の駆動を停止させる。停止後の一定時間、タイミングローラ31、32のエンコーダ30のパルス信号を監視し、パルス数をカウントする。
【0061】
また、制御部301内のCPUは、タイミングローラ駆動用モータ33(330)の起動タイミング等を補正制御しながら、モータ33(330)の駆動により用紙Mを転写位置まで搬送させて、転写される画像の位置を用紙Mの所定位置に合わせるようになっており、また、画像書き込み時には、ポリゴンモータ205を所定の回転数で回転駆動させて、レーザ光Lを所定のタイミングで発光させる。
【0062】
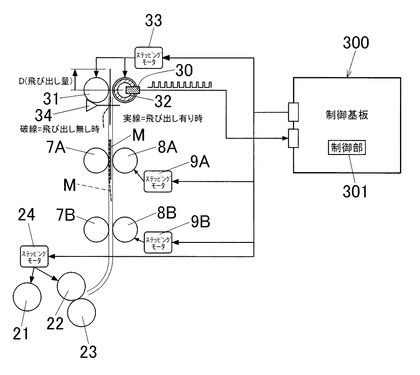
図4は、タイミングローラ31、32のニップ部からの用紙Mの飛び出し量を計測するエンコーダ30を、タイミングローラ駆動用モータ330に内蔵した場合に、該モータの起動タイミングを遅延させる動作説明図である。
【0063】
図4において、用紙Mが搬送ローラ7A、8A等で搬送されている時は、タイミングローラ駆動用モータ330への電力供給は遮断されており、従って前記タイミングローラ31、32の駆動はなされておらず停止中である。
【0064】
用紙Mに対して前記タイミングローラ31、32のニップ部で転写時の画像位置合わせを実行する場合、タイミングセンサ34が用紙Mの通過したことを検知すれば、タイミング信号がエンジン制御基板300における制御部301に送出され、それに伴って制御部301は、前記タイミングローラ31、32のニップ部からの用紙Mの先端部の飛び出しがあれば、前記モータ(図4ではブラシレスモータ)330内に実装されている飛び出し量計測手段としてのエンコーダ30に指示して用紙Mの先端部の飛び出し量Dの計測を指示する。
【0065】
前記エンコーダ30は、実線で示すように用紙Mの飛び出しがある場合(破線は、飛び出しがない場合)、用紙Mの先端部のタイミングローラニップ部からの飛び出し量Dを計測し、その飛び出し量Dに対応するパルス数(量)を制御部301に送出する。制御部301は、このパルス数に基づいてタイミングローラ31、32の回転量を算出し、これを基にモータ330の起動タイミングの遅延時間T(図6参照)を設定し、それに従って前記モータ330への電力を供給してタインミングローラ31、32を起動させる。
【0066】
いま、例えば、前記タイミングローラ31、32のローラ径が20mm、エンコーダ30の回転数が628pprとした場合、エンコーダ30からの1パルス当たり0.1mmの用紙Mが突き出されることになる。
【0067】
この例では、エンコーダ30から10パルスが出力されたので、ニップ部からの用紙Mの飛び出し量Dは1mmとなる。
【0068】
このように、用紙Mの先端のニップ部からの飛び出し量D(例えば1mm)に基づいて、前記制御部301により、モータ330つまりタイミングローラ31、32の起動タイミングの遅延時間Tが設定されることになる。
【0069】
ところで、図4のものでは、タイミングローラ31、32の駆動用モータ330等にブラシレスモータを使った例で説明したが、図5に示すように、タイミングローラ31、32の駆動用モータ33等に、ステッピングモータを使った構成であっても同様に制御が実施される。図5においては、タイミングローラ31、32(いずれか一方)に前記エンコーダ30を内蔵したものである。
【0070】
なお、前記用紙Mの飛び出し量Dの計測手段としては、エンコーダ30に限定されるものではなく、例えばラインセンサであってもよい。
【0071】
但し、図5に示すように、タイミングローラ31、32にエンコーダ30を内蔵した場合、既存の部品構成をそのままにして制御方法を変えるだけで、簡単に用紙Mの飛び出し量Dを検出することができるので、ラインセンサを導入する構成よりも有利である。
【0072】
図6(A)は、タイミングローラ31、32の駆動用モータ33(330)の起動タイミングを遅延させる場合の時間・速度の特性図である。
【0073】
図6(A)において、通常起動の特性を実線で示してあり、これに対してタイミングローラ31、32を駆動するモータ330(33)の起動タイミングをT(時間)だけ遅延させて用紙位置を補正した場合の特性を点線で示してある。斜線部分の面積が起動タイミングを補正した場合の用紙位置の補正量(この例では、1mm)となる。
【0074】
この場合、モータ330(33)の起動タイミングを時間Tだけ遅らせることにより、起動時の用紙走行量が前記用紙飛び出し量Dに相当する距離だけ少なくなる。つまり、用紙飛び出し量Dに相当する距離だけ用紙位置が補正される結果、転写画像と用紙の位置を適正に合致させることができる。
【0075】
図6(B)は、用紙飛び出し量Dに相当する位置データにより、モータ330(33)によるタイミングローラ31、32の起動時の回転速度を遅くした場合の時間・速度の特性図である。
【0076】
図6(B)において、通常起動の特性を実線で示してあり、これに対してタイミングローラ31、32を駆動するモータ330(33)の起動時の速度を所定時間遅くして用紙位置を補正した場合の特性を点線で示してある。斜線部分の面積が用紙位置の補正量(この例では、1mm)となる。
【0077】
この場合、用紙Mの飛び出し量Dに相当する位置データをモータ330(33)の起動前に減算しておき、起動を開始する。用紙位置を制御する際、通常駆動の時よりも速度を遅くして駆動するので、用紙Mの飛び出し量D(ここでは1mm)に相当する分、走行距離が少なくなる。つまり、用紙飛び出し量Dに相当する距離だけ用紙位置が補正される結果、転写画像と用紙の位置を適正に合致させることができる。
【0078】
図7は、感光体71に対するレーザ光Lの発光タイミングを遅延させることにより、用紙と画像との相対位置を補正する場合の動作説明図である。
【0079】
図7において、駆動ローラ70で回転駆動される感光体71の表面に対して、レーザ203から発射されてポリゴンミラー204で反射されたレーザ光Lが画像データに従って照射される。これにより、感光体71の表面が露光されて静電潜像が形成され、その後の現像工程を経て感光体71の表面の静電潜像にトナー像が形成される。
【0080】
前記タイミングローラ31、32を駆動するモータ330の起動時間を遅延させるような場合、コントローラ基板200の制御部201によりポリゴンモータ205の回転を制御することにより、用紙Mの飛び出し量Dに応じて、レーザ光Lの発光タイミングを遅延させて感光体71の表面に対する書き込み位置を必要量Pだけ変移させるようになっている。
【0081】
例えば、前記用紙Mの飛び出し量Dが、例えば1mmの場合、レーザ光Lの発光タイミングを遅延させて、書き込み位置を1mm前に移動させれば、画像形成位置が適正に確保される。
【0082】
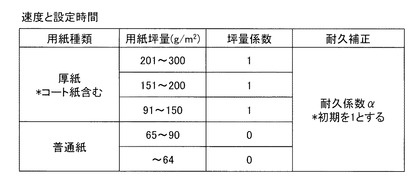
図8は、転写画像と用紙の位置合わせを補正する場合に参考とする用紙種別と坪量係数等との関係を示す表である。
【0083】
図8においては、項目として、用紙種類、用紙坪量〔g/m2)、坪量係数、耐久補正があり、耐久補正は、すべてが耐久係数α(初期を1とする)となっている。用紙種類としては、厚紙(コート紙を含む)と普通紙とがある。
【0084】
厚紙の場合、用紙坪量〔g/m2)が91〜300の全ての場合に、坪量係数が1となっている。また、普通紙では、用紙坪量〔g/m2)が〜90の全ての場合に、坪量係数が0となっている。
【0085】
図9は、タイミングローラ31、32の耐久回数と耐久係数αとの関係を示すグラフである。
【0086】
図9において、タイミングローラ31、32の耐久回数が一定値以上になるにつれて、耐久係数が大きくなっている。
【0087】
なお、前記耐久係数αについては、予め実験等でタイミングローラ31、32の耐久回数と滑り量の関係である耐久係数αを算出しておく。そして、以下の式を用い、これを実際の用紙Mの先端位置量とする。
【0088】
用紙Mの先端位置=エンコーダ30のパルス数×0.1×坪量係数×耐久係数α
ここで、普通紙の秤量係数は0であるから、この実施形態では秤量係数が1である厚紙の時にのみ、タイミングローラからの用紙の飛び出しがあるものとする。
【0089】
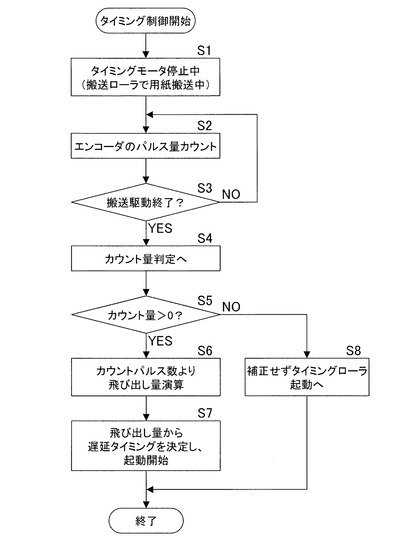
図10は、タイミングローラ駆動用モータ33(330)の起動タイミングを遅延させて、転写画像と用紙の位置合わせを補正する場合の動作を示すフローチャートである。なお、図10以降のフローチャートに示す動作は、制御部301のCPUが図示しないROM等の記録媒体に記録された動作プログラムに従って動作することにより実行される。
【0090】
図10において、ステップS1では、給紙部5から給紙された用紙Mが搬送ローラ7A、8A等により搬送中であるが、前記タイミングローラ駆動用モータ33(330)は停止している。なお、図10ではタイミングローラ駆動用モータを単にタイミングモータと記している。
【0091】
ステップS2では、搬送中の用紙Mの先端がタイミングセンサ34で検知されると、一定時間経過後、搬送が停止され、一定の停止期間エンコーダ30のパルス量(数)をカウントする。
【0092】
ステップS3では、用紙Mの搬送駆動が終了した否かを判断し、用紙Mの搬送駆動が終了していなければ(ステップS3でNO)、ステップS2に戻って駆動終了を待つ。用紙Mの搬送駆動が終了すれば(ステップS3でYES)、ステップS4では、前記エンコーダ30のパルス量(数)のカウント値の判定を行う。
【0093】
ステップS5では、エンコーダ30のパルス量(数)のカウント値が0から増えているか否か(カウント値>0)を判断し、カウント値>0でなければ(ステップS5でNO)、ステップS8では、補正せずにタイミングローラ31、32を起動して処理を終了する。カウント値>0であれば(ステップS5でYES)、ステップS6に進む。
【0094】
ステップS6では、カウント値(パルス数)から用紙Mの飛び出し量Dを演算し、ステップS7では、飛び出し量Dから前記遅延タイミングを決定し、起動を開始する。
【0095】
図11は、用紙種類や温度・湿度を考慮して転写画像と用紙の位置合わせを補正する場合の動作を示すフローチャートである。
【0096】
図11において、ステップS11では、用紙が厚紙か否かを判断し、用紙が厚紙でなければ(ステップS11でNO)、ステップS22で電力削減のためにエンコーダ30の電力をカットし、ステップS23で、補正制御を行なわずにタイミングローラ31、32を起動してから、終了する。
【0097】
用紙が厚紙であれば(ステップS11でYES)、ステップS12では、湿度が70%以上か否かを判断し、湿度が70%以上あれば(ステップS12でYES)、ステップS22に進み、電力削減のためにエンコーダ30の電力をカットする。湿度が70%以上でなければ(ステップS12でNO)、ステップS13に進む。
【0098】
ステップS13では、給紙部5から給紙された用紙Mが搬送ローラ7A、8A等により搬送中であるが、前記タイミングローラ駆動用モータ33(330)は停止している。ステップS14では、搬送中の用紙Mの先端がタイミングセンサ34で検知されると、一定時間経過後、搬送が停止され、一定の停止期間エンコーダ30のパルス量(数)をカウントする。
【0099】
ステップS15では、用紙Mの搬送駆動が終了した否かを判断し、用紙Mの搬送駆動が終了していなければ(ステップS15でNO)、ステップS14に戻って駆動終了を待つ。用紙Mの搬送駆動が終了すれば(ステップS15でYES)、ステップS16では、前記エンコーダ30のパルス量(数)のカウント値の判定を行う。
【0100】
ステップS17では、エンコーダ30のパルス量(数)のカウント値が0から増えているか否か(カウント値>0)を判断し、カウント値>0でなければ(ステップS17でNO)、ステップS23に進み、補正せずにタイミングローラ31、32を起動してから終了する。カウント値>0であれば(ステップS17でYES)、ステップS18に進む。
【0101】
ステップS18では、カウント値(パルス数)から用紙Mの飛び出し量Dを演算し、ステップS19では、ローラ耐久回数より耐久係数αを算出し、ステップS20では、耐久係数αも考慮して用紙Mの飛び出し量Dを、用紙Mの飛び出し距離=エンコーダ30のパルス数×0.1×坪量係数×耐久係数αの式にて補正した後、ステップS21で、補正後の飛び出し量Dから前記遅延タイミングを決定し、起動を開始する。
【0102】
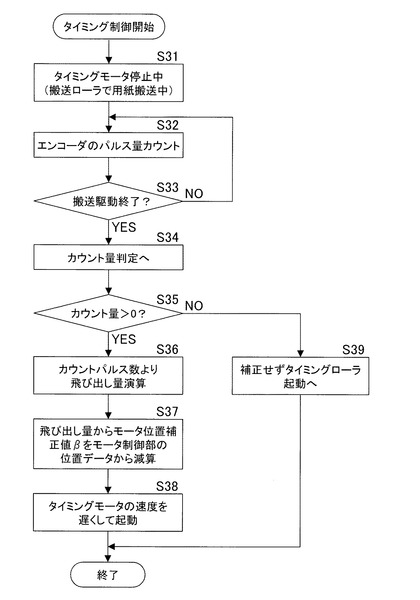
図12は、タイミングローラ駆動用モータ33(330)の起動速度を遅くして、転写画像と用紙の位置合わせを補正する場合の動作を示すフローチャートである。
【0103】
図12において、ステップS31では、給紙部5から給紙された用紙Mが搬送ローラ7A、8A等により搬送中であるが、前記タイミングローラ駆動用モータ33(330)は停止している。ステップS32では、搬送中の用紙Mの先端がタイミングセンサ34で検知されると、一定時間経過後、搬送が停止され、一定の停止期間エンコーダ30のパルス量(数)をカウントする。
【0104】
ステップS33では、用紙Mの搬送駆動が終了した否かを判断し、用紙Mの搬送駆動が終了していなければ(ステップS33でNO)、ステップS32に戻って駆動終了を待つ。用紙Mの搬送駆動が終了すれば(ステップS33でYES)、ステップS34では、前記エンコーダ30のパルス量(数)のカウント値の判定を行う。
【0105】
ステップS35では、エンコーダ30のパルス量(数)のカウント値が0から増えているか否か(カウント値>0)を判断し、カウント値>0でなければ(ステップS35でNO)、ステップS39では、補正せずにタイミングローラ31、32を起動してから終了し、カウント値>0であれば(ステップS35でYES)、ステップS36に進む。
【0106】
ステップS36では、カウント値(パルス数)から用紙Mの飛び出し量Dを演算し、ステップS37では、用紙Mの飛び出し量Dからモータ位置補正値βをモータ制御部301の位置データから減算する(初期位置情報=0−モータ位置補正値β)。
【0107】
ステップS38では、タイミングモータ33(330)を通常起動よりも速度を遅くして起動する。
【0108】
図13は、画像形成のための静電潜像の書き込み動作のタイミングを遅らせることにより、転写画像と用紙の位置合わせを補正する場合の動作を示すフローチャートである。
【0109】
図13において、ステップS41では、給紙部5から給紙された用紙Mが搬送ローラ7A、8A等により搬送中であるが、前記タイミングローラ駆動用モータ33(330)は停止している。ステップS42では、搬送中の用紙Mの先端がタイミングセンサ34で検知されると、一定時間経過後、搬送が停止され、一定の停止期間エンコーダ30のパルス量(数)をカウントする。
【0110】
ステップS43では、用紙Mの搬送駆動が終了した否かを判断し、用紙Mの搬送駆動が終了していなければ(ステップS43でNO)、ステップS42に戻って駆動終了を待つ。用紙Mの搬送駆動が終了すれば(ステップS43でYES)、ステップS44では、前記エンコーダ30のパルス量(数)のカウント値の判定を行う。
【0111】
ステップS45では、エンコーダ30のパルス量(数)のカウント値が0から増えているか否か(カウント値>0)を判断し、カウント値>0でなければ(ステップS45でNO)、ステップS49では、補正せずにタイミングローラ31、32を起動してから終了し、カウント値>0であれば(ステップS45でYES)、ステップS46に進む。
【0112】
ステップS46では、カウント値(パルス数)から用紙Mの飛び出し量Dを演算し、ステップS47では、用紙Mの飛び出し量Dから遅延タイミングを決定し、画像の書き込みを開始する。
【0113】
ステップS48では、所定時間後、タイミングローラ駆動用モータ33(330)の起動を開始してから終了する。
【0114】
このように、この実施形態では、タイミングローラ31、32により用紙を画像に対して位置合わせする際には、タイミングローラ駆動用モータを励磁するホールド機能を使わず、タイミングローラ駆動用モータへの電力供給は遮断されているので、ホールド電力が要らずモータの電力消費が低減される。しかも、計測された用紙先端部のニップ部からの飛び出し量に基づいて用紙と画像との相対位置が補正されるから、従来と同様に、用紙の適正位置に画像を転写することができる。
【0115】
なお、以上の実施形態では、タイミングローラ駆動用モータ33(330)の起動タイミングの遅延、起動速度の減少、画像データの書き込みタイミングの遅延をそれぞれ独立して行うことにより、転写画像と用紙との相対的位置の補正を行ったが、これらの2つ以上を組み合わせても良く、転写画像と用紙の少なくとも一方の他方に対する相対的位置が補正されれば良い。
【符号の説明】
【0116】
5 給紙部
7A(7B、7C)、8A(8B、8C) 搬送ローラ
30 用紙飛び出し量計測手段(エンコーダ)
31、32 タイミングローラ
33(330) タイミングローラ駆動用モータ
34 タイミングセンサ
301 制御部
203 静電潜像書き込み用のレーザ
D 用紙の飛び出し量(距離)
M 用紙
P 書き込みタイミングずらし量
【技術分野】
【0001】
この発明は、給紙部から搬送される用紙に転写される画像に対して前記用紙を位置合わせするためのタイミングローラを備えたMFP(Multi Function Peripherals) 等の画像形成装置、同装置における転写画像と用紙の位置合わせ補正方法、及び画像形成装置のコンピュータに前記位置合わせ補正方法を実行させるための位置合わせ補正プログラムに関する。
【背景技術】
【0002】
多機能デジタル画像形成装置であるMFP等の画像形成装置では、周知のように、給紙カセットから搬送される用紙に対して、例えば中間転写ベルト上の画像(トナ−画像)が適正位置に転写されるように、用紙搬送方向における転写位置上流側にステッピングモータないしはブラシレスモータで回転駆動されるタイミングローラが配備されており、タイミングローラ上流近傍のタイミングセンサで用紙が検出されると、タイミングローラで用紙を一旦停止させておき、転写後にタイミングローラの再起動のタイミングを制御するようになっている。
【0003】
具体的には、搬送された用紙をタイミングローラで一旦停止させる際に、用紙(とくに厚紙等)の先端がタイミングローラのニップ部から飛び出さないように、前記モータを励磁状態のままにしてタイミングローラに保持力(ホールド機能)を与え、該タイミングローラのニップ部に用紙の先端を当て込んで撓み(ループ)を作成することによりスキュー補正を行なっている。
【0004】
また、従来、タイミングローラの駆動を他の駆動から独立して制御可能にした複写機において、タイミングローラの駆動手段を定電流駆動方式のステッピングモータで構成するとともに、このステッピングモータをホールドする時の設定電流を、回転時の設定電流よりも高く設定する電流切り換え手段を設けることにより、電力消費を抑制し、さらに、タイミングローラの下流側に配備した転写紙検知センサにより、通過時から転写位置までの用紙の位置ずれを補正するようにした技術が提案されている(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開平9−235048号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかし、上述したように、用紙先端がタイミングローラのニップ部から飛び出さないようにホールド機能を作用させる場合、この間もタイミングローラの駆動モータが励磁されたまままになって電力が消費されてしまうといった問題があった。
【0007】
また、前記特許文献1に記載の技術においては、ホールド時よりも用紙搬送駆動時のステッピングモータの電流値を大きくし、換言すれば、ホールド時の電力消費を小さくしているが、ホールド機能のために電力が消費されていることには変わらない。
【0008】
この発明は、上記実情に鑑みてなされたものであり、タイミングローラにより転写画像に対する用紙の位置合わせを行う際の電力消費を有効に抑制できる画像形成装置、同装置における転写画像と用紙の位置合わせ補正方法、及び画像形成装置のコンピュータに前記位置合わせ補正方法を実行させるための位置合わせ補正プログラムを提供することを課題としている。
【課題を解決するための手段】
【0009】
上記課題は以下の手段によって解決される。
(1)給紙部から給紙された用紙を搬送する搬送ローラと、前記搬送ローラで搬送された用紙への画像の転写位置の上流側に設けられ、前記用紙を一旦停止させ、用紙へ転写される転写画像に対する用紙の位置合わせを行うタイミングローラと、前記タイミングローラを回転駆動するとともに、前記用紙がタイミングローラに到達する際には電力供給が遮断されているモータと、前記タイミングローラで停止した用紙の先端部のニップ部からの飛び出し量を計測する飛び出し量計測手段と、前記飛び出し量計測手段により計測された飛び出し量に基づいて、前記転写画像と用紙の少なくとも一方の他方に対する相対的位置を補正する補正手段と、を備えたことを特徴とする画像形成装置。
(2)前記補正手段は、飛び出し量計測手段により計測された飛び出し量に応じて、前記モータによるタイミングローラの起動タイミングを遅らせることにより、前記相対的位置を補正する前項1に記載の画像形成装置。
(3)前記補正手段は、飛び出し量計測手段により計測された飛び出し量に応じて、前記モータによるタイミングローラの起動時の回転速度を所定期間遅くすることにより、前記相対的位置を補正する前項1または2に記載の画像形成装置。
(4)前記補正手段は、飛び出し量計測手段により計測された飛び出し量に応じて、画像形成のための静電潜像の書き込み動作のタイミングを遅らせることにより、前記相対的位置を補正する前項1〜3のいずれかに記載の画像形成装置。
(5)前記飛び出し量計測手段は、前記モータの回転数を検知してパルスを出力するエンコーダで構成されている前項1〜4のいずれかに記載の画像形成装置。
(6)前記補正手段は、前記飛び出し量計測手段により計測された飛び出し量を、前記タイミングローラの耐久使用量に応じて補正する前項1〜5のいずれかに記載の画像形成装置。
(7)用紙の種類によって前記飛び出しの発生しない用紙を補正不要用紙とし、前記補正手段は、該補正不要用紙に対しては前記転写画像と用紙の位置合わせの補正を行わない前項1〜6のいずれかに記載の画像形成装置。
(8)前記補正手段は、前記補正不要用紙以外の用紙であっても、一定以上の高湿度条件である場合は、前記転写画像と用紙の位置合わせの補正を行わない前項7に記載の画像形成装置。
(9)前記飛び出し量計測手段は、用紙の種類が補正不要用紙である場合、該補正不要用紙に対して用紙飛び出し量の計測を行わない前項7または8に記載の画像形成装置。
(10)給紙部から給紙された用紙を搬送する搬送ローラと、前記搬送ローラで搬送された用紙への画像の転写位置の上流側に設けられ、前記用紙を一旦停止させ、用紙へ転写される転写画像に対する用紙の位置合わせを行うタイミングローラと、前記タイミングローラを回転駆動するモータと、を備えた画像形成装置における転写画像と用紙の位置合わせ補正方法であって、前記用紙がタイミングローラに到達する際には前記モータへの電力供給を遮断するステップと、前記タイミングローラで停止した用紙の先端部のニップ部からの飛び出し量を計測する飛び出し量計測ステップと、前記飛び出し量計測ステップにおいて計測された飛び出し量に基づいて、前記転写画像と用紙の少なくとも一方の他方に対する相対的位置を補正する補正ステップと、を備えたことを特徴とする画像形成装置における転写画像と用紙の位置合わせ補正方法。
(11)給紙部から給紙された用紙を搬送する搬送ローラと、前記搬送ローラで搬送された用紙への画像の転写位置の上流側に設けられ、前記用紙を一旦停止させ、用紙へ転写される転写画像に対する用紙の位置合わせを行うタイミングローラと、前記タイミングローラを回転駆動するモータと、を備えた画像形成装置のコンピュータに実行させるための転写画像と用紙の位置合わせ補正プログラムであって、前記用紙がタイミングローラに到達する際には前記モータへの電力供給を遮断するステップと、前記タイミングローラで停止した用紙の先端部のニップ部からの飛び出し量を計測する飛び出し量計測ステップと、前記飛び出し量計測ステップにおいて計測された飛び出し量に基づいて、前記転写画像と用紙の少なくとも一方の他方に対する相対的位置を補正する補正ステップと、を前記コンピュータに実行させる転写画像と用紙の位置合わせ補正プログラム。
【発明の効果】
【0010】
前項(1)に記載の発明によれば、用紙がタイミングローラに到達する際にはモータへの電力供給が遮断される。このため、タイミングローラのニップ部からの用紙の先端部が飛び出すことがあるが、該用紙の先端部の飛び出し量が用紙飛び出し量検出手段により計測され、この計測された飛び出し量に基づいて、前記転写画像と用紙の少なくとも一方の他方に対する相対的位置が補正される。
【0011】
つまり、用紙がタイミングローラに到達する際には、タイミングローラ駆動用モータを励磁するホールド機能を使わないので、ホールド電力が不要となりモータの電力消費が低減される。しかも、計測された飛び出し量に基づいて転写画像と用紙の少なくとも一方の他方に対する相対的位置が補正されるから、従来と同様に、用紙の適正位置に画像を転写できる。
【0012】
前項(2)に記載の発明によれば、計測された飛び出し量に応じて、モータによるタイミングローラの起動タイミングが遅延されるので、転写画像と用紙の少なくとも一方の他方に対する相対的位置を適正に補正できる。
【0013】
前項(3)に記載の発明によれば、計測された用紙の飛び出し量に応じて、モータによるタイミングローラの起動時の回転速度が所定期間遅くなるので、転写画像と用紙の少なくとも一方の他方に対する相対的位置を適正に補正できる。
【0014】
前項(4)に記載の発明によれば、計測された用紙の飛び出し量に応じて、画像形成のための静電潜像の書き込み動作のタイミングが遅延されるので、転写画像と用紙の少なくとも一方の他方に対する相対的位置を適正に補正できる。
【0015】
前項(5)に記載の発明によれば、用紙の飛び出し量計測手段がエンコーダであるから、エンコーダからのパルス数をカウントして飛び出し量を容易に判別でき、また、このエンコーダをモータに内蔵すれば、飛び出し量計測手段として、ラインセンサを導入するよりも、従来構造を生かせた簡素な構成で実施可能となる。
【0016】
前項(6)に記載の発明によれば、計測された用紙の飛び出し量がタイミングローラの耐久使用量によって補正されるので、タイミングローラの耐久使用量に左右されることなく、転写画像と用紙の少なくとも一方の他方に対する相対的位置をさらに適正に補正できる。
【0017】
前項(7)に記載の発明によれば、例えば普通紙等の飛び出しの発生しにくい補正不要用紙に対しては、転写画像と用紙の相対的位置の補正処理が無駄に実施されることはない。
【0018】
前項(8)に記載の発明によれば、補正不要用紙以外の用紙、例えば厚紙であっても、一定以上の高い湿度であれば、転写画像と用紙の相対的位置の補正処理は実施されない。
【0019】
前項(9)に記載の発明によれば、用紙が補正不要用紙であれば、エンコーダ等の飛び出し量計測手段で飛び出し量が計測されることはなく、無駄な計測動作の実施を防止できる。
【0020】
前項(10)に記載の発明によれば、用紙がタイミングローラに到達する際には、タイミングローラ駆動用モータを励磁するホールド機能を使わないので、ホールド電力が不要となりモータの電力消費が低減される。しかも、計測された飛び出し量に基づいて転写画像と用紙の少なくとも一方の他方に対する相対的位置が補正されるから、用紙の適正位置に画像を転写できる。
【0021】
前項(11)に記載の発明によれば、用紙がタイミングローラに到達する際には、タイミングローラ駆動用モータを励磁するホールド機能を使わず、しかも、計測された飛び出し量に基づいて転写画像と用紙の少なくとも一方の他方に対する相対的位置を補正する処理を、画像形成装置のコンピュータに実行させることができる。
【図面の簡単な説明】
【0022】
【図1】この発明の一実施形態に係る画像形成装置を示す概略構成図である。
【図2】同じく画像形成装置において、ステッピングモータの代わりにブラシレスモータを使用した例の概略構成図である。
【図3】同じく画像形成装置の電気的構成を示すブロック図である。
【図4】タイミングローラのニップ部からの用紙の飛び出し量を計測するエンコーダをタイミングローラ駆動用モータに内蔵した場合の、該モータの起動タイミングを遅延させる動作説明図である。
【図5】同じくエンコーダをタイミングローラに内蔵した場合の、タイミングローラ駆動用モータの起動タイミングを遅延させる動作説明図である。
【図6】(A)は、タイミングローラ駆動用モータの起動タイミングを遅延させる場合の時間・速度の特性図、(B)はタイミングローラ駆動用モータの起動時の速度を遅くする場合の時間・速度の特性図である。
【図7】感光体に対するレーザ光の発光タイミングを遅延させる場合の要部の動作説明図である。
【図8】転写画像と用紙の相対的位置の補正を行う場合に参考とする用紙種別と耐久係数との関係を示す表である。
【図9】タイミングローラの耐久回数と耐久係数αとの関係を示すグラフである。
【図10】画像形成装置で実施される転写画像と用紙の相対的位置の補正処理を示すフローチャートである。
【図11】転写画像と用紙の相対的位置の別の補正処理を示すフローチャートである。
【図12】転写画像と用紙の相対的位置のさらに別の補正処理を示すフローチャートである。
【図13】転写画像と用紙の相対的位置のさらに別の補正処理を示すフローチャートである。
【発明を実施するための形態】
【0023】
以下、この発明の実施形態を図面に基づいて説明する。
【0024】
図1は、この発明の一実施形態に係る画像形成装置を示す概略構成図である。
【0025】
図1において、この画像形成装置は、本体10Aと給紙オプション10Bとを備えている。前記本体10Aは、プリント部1の一部を構成する転写部2と、定着部3と、排紙部4と、給紙部5の一部と、用紙搬送部6とを備えている。
【0026】
前記プリント部1は、図示しないスキャナ部で読み取られた原稿画像の画像データに従って感光体71(図7)上に形成された静電潜像をトナーで現像してトナー像を形成する他に、複数のローラ11、12に掛設されて回転する無端の中間転写ベルト13に感光体71上のトナー像を1次転写するようになっている。
【0027】
前記転写部2は、前記一方のローラ12に転接する転写ローラ14により、前記中間転写ベルト13のトナー像を用紙Mに2次転写するものである。
【0028】
前記定着部3は、少なくとも一方が加熱ローラからなる一対のローラ15、16を有しており、前記用紙Mに転写されたトナー像を加熱して定着するものである。
【0029】
前記排紙部4は、例えば、ステッピングモータ40で駆動される一対の排紙ローラ18、19を有し、前記定着部3を経た用紙Mを排紙トレイ(図示せず)に排紙するものである。この排紙ローラ18、19は、用紙の裏面にも印字する場合には、用紙Mの印字面を反転させるために該用紙Mを後述する用紙反転搬送部62に戻す反転ローラとして機能するように構成されている。
【0030】
なお、符号17は前記定着された用紙Mを検知する排紙センサである。
【0031】
前記給紙部5は、用紙Mを収容する複数(例えば4段)の給紙カセット5A、5B、5C、5Dを備えており、給紙カセット5A、5Bは、本体10A側に属し、他の給紙カセット5C、5Dは、給紙オプション10Bとなっている。
【0032】
各給紙カセット5A、5B、5C、5D内には、用紙Mを1枚づつ引き出すピックアップローラ21と、ピックアップローラ21で引き出された1枚の用紙Mを用紙搬送部6に給紙する給紙および捌きローラ22、23と、前記ピックアップローラ21と、給紙および捌きローラ22、23の一方とを駆動するステッピングモータ24とを備えている。
【0033】
前記用紙搬送部6は、前記給紙部5から給紙された用紙Mを前記排紙部4まで搬送する主搬送路61と、用紙Mの裏面にも印字する際に、排紙/反転ローラ18、19から戻された用紙Mの印字面を反転させて転写部2に搬送する用紙反転搬送路62とを備えている。
【0034】
前記主搬送路61には、各給紙カセット5B(5C、5D)に対応して、用紙Mに対する縦方向(上方向)搬送用の一対の搬送ローラ7A(7B、7C)、8A(8B、8C)がそれぞれ配備されている。
【0035】
これら搬送ローラ7A(7B、7C)、8A(8B、8C)は、ステッピングモータ9A(9B、9C)でそれぞれ回転駆動されるようになっており、各給紙ローラ21、22で給紙された用紙Mを搬送路61に沿って搬送するようになっている。
【0036】
前記用紙反転搬送路62は、一対3組の両面用搬送ローラ62A、63A(62B、63B)(62C、63C)が配置されており、これら搬送ローラ62A、63A(62B、63B)(62C、63C)は、ステッピングモータ64でそれぞれ回転駆動されるようになっている。
【0037】
また、前記主搬送路61には、転写部2の上流側近傍の位置に、一対のタイミングローラ31、32が配備されており、これらタイミングローラ31、32は、ステッピングモータ33で回転駆動されるようになっている。これらタイミングローラ31、32の上流側近傍には、搬送されてきた用紙Mを検出するタイミングセンサ34が配置されている。
【0038】
前記タイミングローラ31、32の駆動用モータ33は、用紙Mがタイミングローラ31、32に到達する際には、電力供給が遮断されて駆動停止状態となっている。また、起動時には、タイミングローラ31、32のニップ部からの用紙Mの先端の飛び出し量の計測値に応じて起動タイミングをずらして用紙の位置を補正し、あるいは起動速度を遅くして用紙の位置を補正することにより、用紙Mを転写画像に対して適正に位置決めするように構成されている。
【0039】
なお、前記給紙部5内のステッピングモータ24、搬送路61のステッピングモータ9A、9B、9C、排紙部4のステッピングモータ40、タイミングローラ用のステッピングモータ33、用紙反転搬送路62のステッピングモータ64は、これに限られるものではない。例えば、図2に示すように、給紙部5内のブラシレスモータ(BLMとも言う)240、搬送路61のブラシレスモータ(BLM)90A、90B、90C、排紙部4のブラシレスモータ400、タイミングローラ用のブラシレスモータ330、用紙反転搬送路62のブラシレスモータ64に変更することも可能であり、また、ブラシモータの採用も可能である。なお、図2において図1と同一の構成部分については同一の符号を付し、詳細な説明は省略する。
【0040】
図3は、同じく画像形成装置の電気的構成を示すブロック図である。
【0041】
図3において、この画像形成装置は、操作パネル100と、コントローラ基板200と、エンジン制御基板300とを備えている。
【0042】
前記操作パネル100は、パネル制御部101と、各種のハードキーを具備したキー部102と、LCD等からなる表示部103とを備えており、これらキー部102や表示部103の動作は、制御部101で制御される。
【0043】
前記コントローラ基板200は、制御部201と、レーザ(図7参照)203に対するドライバー部(ドライバー部IC)202とを備えている。
【0044】
前記制御部201は、前記操作パネル100の制御部101から制御指示を受けて、前記ドライバー部202に対してイネーブル信号やAPC(自動出力コントロール)信号を送出するようになっている。
【0045】
前記ドライバー部202は、レーザ203を駆動するものであり、また、レーザ203は、感光体71の表面に対する露光用のレーザ光L(図7)を発射するものである。また、ドライバー部202からPD信号が制御部201に送出されるようになっている。
【0046】
また、前記制御部201は、レーザ光Lを走査するポリゴンミラー(図7)204の駆動用ポリゴンモータ(図7)205に対してイネーブル信号やクロック信号を送出して駆動を制御するようになっている。また、ポリゴンモータ205から制御部201に対してロック信号が送出されるようになっている。
【0047】
前記エンジン制御部300は、コントローラ基板200における制御部201から指示される制御部301と、記憶部302と、制御部301のCPUで制御されるドライバー部303、304、305を備えている。
【0048】
前記記憶部302は、例えば、ハードディスク装置(HDD)や半導体メモリ等からなり、各種データを記憶する他に、運転マップを内蔵したり、タイミングローラーから突出した用紙の補正等に関する用紙補正情報を記憶する手段である。
【0049】
前記制御部301のCPUは、前記ドライバー部303に対してイネーブル信号やクロック信号を送出するようになっている。
【0050】
前記ドライバー部303は、前記給紙部5内のモータ(ステッピングモータやブラシレスモータ)24、240を駆動する。
【0051】
また、制御部301は、前記ドライバー部304に対してイネーブル信号やクロック信号を送出するようになっている。
【0052】
前記ドライバー部304は、前記搬送用のモータ(ステッピングモータやブラシレスモータ)9A、90A、9B、90B、9C、90B等を駆動する。
【0053】
また、制御部301は、前記ドライバー部305に対してイネーブル信号やクロック信号を送出するようになっている。
【0054】
前記ドライバー部305は、前記タイミングローラ駆動用のモータ(ステッピングモータやブラシレスモータ)33、330を駆動する。
【0055】
なお、前記タイミングセンサ34は、タイミングローラ31、32に用紙Mが到達したのを検知してタイミング信号を制御部301に送出する。また、タイミングローラ駆動用モータ33(330)に内蔵されるエンコーダ(図4、図5に詳細を示す)30は、エンコーダパルス信号を制御部301に送出する。
【0056】
さらに、温湿度センサ306は、温度/湿度を検知して温度/湿度信号を制御部301に送出するようになっている。つまり、タイミングローラ31、32により用紙と画像との相対位置補正を行なう際に、補正不要用紙以外のもの、例えば厚紙の場合でも、一定以上の高湿度であれば、タイミングローラ31、32による画像位置補正が実施されないようになっている。
【0057】
上記構成の画像形成装置では、操作パネル100での操作情報が制御部101からコントローラ基板200の制御部201に送信され、これに基づいて該コントローラ基板200の制御部201からエンジン制御基板300の制御部301にエンジン制御情報が送信される。そして、その制御情報に基づいて制御部301内のCPUにより各負荷が制御される。
【0058】
制御部301内のCPUは、例えばユーザの設定モードに応じてシステムの速度を変更する(例えば、普通紙では165mm/s、厚紙では55mm/s)。
【0059】
また、制御部301内のCPUは、各モータドライバー部303(304、305)等に対してイネーブル信号と駆動速度に応じたクロック信号を送信することにより、給紙モータ24(240)、搬送モータ9A(90A)、9B(90B)、9C(90C)、タイミングローラ駆動用モータ33(330)等を所望の条件で動作させる。
【0060】
さらに、制御部301内のCPUは、タイミングセンサ34がOFFからONに切り替わることにより、タイミングローラ31、32に用紙Mが到達したことを検知し、一定時間後、搬送ローラ7A、8A・・・等の駆動を停止させる。停止後の一定時間、タイミングローラ31、32のエンコーダ30のパルス信号を監視し、パルス数をカウントする。
【0061】
また、制御部301内のCPUは、タイミングローラ駆動用モータ33(330)の起動タイミング等を補正制御しながら、モータ33(330)の駆動により用紙Mを転写位置まで搬送させて、転写される画像の位置を用紙Mの所定位置に合わせるようになっており、また、画像書き込み時には、ポリゴンモータ205を所定の回転数で回転駆動させて、レーザ光Lを所定のタイミングで発光させる。
【0062】
図4は、タイミングローラ31、32のニップ部からの用紙Mの飛び出し量を計測するエンコーダ30を、タイミングローラ駆動用モータ330に内蔵した場合に、該モータの起動タイミングを遅延させる動作説明図である。
【0063】
図4において、用紙Mが搬送ローラ7A、8A等で搬送されている時は、タイミングローラ駆動用モータ330への電力供給は遮断されており、従って前記タイミングローラ31、32の駆動はなされておらず停止中である。
【0064】
用紙Mに対して前記タイミングローラ31、32のニップ部で転写時の画像位置合わせを実行する場合、タイミングセンサ34が用紙Mの通過したことを検知すれば、タイミング信号がエンジン制御基板300における制御部301に送出され、それに伴って制御部301は、前記タイミングローラ31、32のニップ部からの用紙Mの先端部の飛び出しがあれば、前記モータ(図4ではブラシレスモータ)330内に実装されている飛び出し量計測手段としてのエンコーダ30に指示して用紙Mの先端部の飛び出し量Dの計測を指示する。
【0065】
前記エンコーダ30は、実線で示すように用紙Mの飛び出しがある場合(破線は、飛び出しがない場合)、用紙Mの先端部のタイミングローラニップ部からの飛び出し量Dを計測し、その飛び出し量Dに対応するパルス数(量)を制御部301に送出する。制御部301は、このパルス数に基づいてタイミングローラ31、32の回転量を算出し、これを基にモータ330の起動タイミングの遅延時間T(図6参照)を設定し、それに従って前記モータ330への電力を供給してタインミングローラ31、32を起動させる。
【0066】
いま、例えば、前記タイミングローラ31、32のローラ径が20mm、エンコーダ30の回転数が628pprとした場合、エンコーダ30からの1パルス当たり0.1mmの用紙Mが突き出されることになる。
【0067】
この例では、エンコーダ30から10パルスが出力されたので、ニップ部からの用紙Mの飛び出し量Dは1mmとなる。
【0068】
このように、用紙Mの先端のニップ部からの飛び出し量D(例えば1mm)に基づいて、前記制御部301により、モータ330つまりタイミングローラ31、32の起動タイミングの遅延時間Tが設定されることになる。
【0069】
ところで、図4のものでは、タイミングローラ31、32の駆動用モータ330等にブラシレスモータを使った例で説明したが、図5に示すように、タイミングローラ31、32の駆動用モータ33等に、ステッピングモータを使った構成であっても同様に制御が実施される。図5においては、タイミングローラ31、32(いずれか一方)に前記エンコーダ30を内蔵したものである。
【0070】
なお、前記用紙Mの飛び出し量Dの計測手段としては、エンコーダ30に限定されるものではなく、例えばラインセンサであってもよい。
【0071】
但し、図5に示すように、タイミングローラ31、32にエンコーダ30を内蔵した場合、既存の部品構成をそのままにして制御方法を変えるだけで、簡単に用紙Mの飛び出し量Dを検出することができるので、ラインセンサを導入する構成よりも有利である。
【0072】
図6(A)は、タイミングローラ31、32の駆動用モータ33(330)の起動タイミングを遅延させる場合の時間・速度の特性図である。
【0073】
図6(A)において、通常起動の特性を実線で示してあり、これに対してタイミングローラ31、32を駆動するモータ330(33)の起動タイミングをT(時間)だけ遅延させて用紙位置を補正した場合の特性を点線で示してある。斜線部分の面積が起動タイミングを補正した場合の用紙位置の補正量(この例では、1mm)となる。
【0074】
この場合、モータ330(33)の起動タイミングを時間Tだけ遅らせることにより、起動時の用紙走行量が前記用紙飛び出し量Dに相当する距離だけ少なくなる。つまり、用紙飛び出し量Dに相当する距離だけ用紙位置が補正される結果、転写画像と用紙の位置を適正に合致させることができる。
【0075】
図6(B)は、用紙飛び出し量Dに相当する位置データにより、モータ330(33)によるタイミングローラ31、32の起動時の回転速度を遅くした場合の時間・速度の特性図である。
【0076】
図6(B)において、通常起動の特性を実線で示してあり、これに対してタイミングローラ31、32を駆動するモータ330(33)の起動時の速度を所定時間遅くして用紙位置を補正した場合の特性を点線で示してある。斜線部分の面積が用紙位置の補正量(この例では、1mm)となる。
【0077】
この場合、用紙Mの飛び出し量Dに相当する位置データをモータ330(33)の起動前に減算しておき、起動を開始する。用紙位置を制御する際、通常駆動の時よりも速度を遅くして駆動するので、用紙Mの飛び出し量D(ここでは1mm)に相当する分、走行距離が少なくなる。つまり、用紙飛び出し量Dに相当する距離だけ用紙位置が補正される結果、転写画像と用紙の位置を適正に合致させることができる。
【0078】
図7は、感光体71に対するレーザ光Lの発光タイミングを遅延させることにより、用紙と画像との相対位置を補正する場合の動作説明図である。
【0079】
図7において、駆動ローラ70で回転駆動される感光体71の表面に対して、レーザ203から発射されてポリゴンミラー204で反射されたレーザ光Lが画像データに従って照射される。これにより、感光体71の表面が露光されて静電潜像が形成され、その後の現像工程を経て感光体71の表面の静電潜像にトナー像が形成される。
【0080】
前記タイミングローラ31、32を駆動するモータ330の起動時間を遅延させるような場合、コントローラ基板200の制御部201によりポリゴンモータ205の回転を制御することにより、用紙Mの飛び出し量Dに応じて、レーザ光Lの発光タイミングを遅延させて感光体71の表面に対する書き込み位置を必要量Pだけ変移させるようになっている。
【0081】
例えば、前記用紙Mの飛び出し量Dが、例えば1mmの場合、レーザ光Lの発光タイミングを遅延させて、書き込み位置を1mm前に移動させれば、画像形成位置が適正に確保される。
【0082】
図8は、転写画像と用紙の位置合わせを補正する場合に参考とする用紙種別と坪量係数等との関係を示す表である。
【0083】
図8においては、項目として、用紙種類、用紙坪量〔g/m2)、坪量係数、耐久補正があり、耐久補正は、すべてが耐久係数α(初期を1とする)となっている。用紙種類としては、厚紙(コート紙を含む)と普通紙とがある。
【0084】
厚紙の場合、用紙坪量〔g/m2)が91〜300の全ての場合に、坪量係数が1となっている。また、普通紙では、用紙坪量〔g/m2)が〜90の全ての場合に、坪量係数が0となっている。
【0085】
図9は、タイミングローラ31、32の耐久回数と耐久係数αとの関係を示すグラフである。
【0086】
図9において、タイミングローラ31、32の耐久回数が一定値以上になるにつれて、耐久係数が大きくなっている。
【0087】
なお、前記耐久係数αについては、予め実験等でタイミングローラ31、32の耐久回数と滑り量の関係である耐久係数αを算出しておく。そして、以下の式を用い、これを実際の用紙Mの先端位置量とする。
【0088】
用紙Mの先端位置=エンコーダ30のパルス数×0.1×坪量係数×耐久係数α
ここで、普通紙の秤量係数は0であるから、この実施形態では秤量係数が1である厚紙の時にのみ、タイミングローラからの用紙の飛び出しがあるものとする。
【0089】
図10は、タイミングローラ駆動用モータ33(330)の起動タイミングを遅延させて、転写画像と用紙の位置合わせを補正する場合の動作を示すフローチャートである。なお、図10以降のフローチャートに示す動作は、制御部301のCPUが図示しないROM等の記録媒体に記録された動作プログラムに従って動作することにより実行される。
【0090】
図10において、ステップS1では、給紙部5から給紙された用紙Mが搬送ローラ7A、8A等により搬送中であるが、前記タイミングローラ駆動用モータ33(330)は停止している。なお、図10ではタイミングローラ駆動用モータを単にタイミングモータと記している。
【0091】
ステップS2では、搬送中の用紙Mの先端がタイミングセンサ34で検知されると、一定時間経過後、搬送が停止され、一定の停止期間エンコーダ30のパルス量(数)をカウントする。
【0092】
ステップS3では、用紙Mの搬送駆動が終了した否かを判断し、用紙Mの搬送駆動が終了していなければ(ステップS3でNO)、ステップS2に戻って駆動終了を待つ。用紙Mの搬送駆動が終了すれば(ステップS3でYES)、ステップS4では、前記エンコーダ30のパルス量(数)のカウント値の判定を行う。
【0093】
ステップS5では、エンコーダ30のパルス量(数)のカウント値が0から増えているか否か(カウント値>0)を判断し、カウント値>0でなければ(ステップS5でNO)、ステップS8では、補正せずにタイミングローラ31、32を起動して処理を終了する。カウント値>0であれば(ステップS5でYES)、ステップS6に進む。
【0094】
ステップS6では、カウント値(パルス数)から用紙Mの飛び出し量Dを演算し、ステップS7では、飛び出し量Dから前記遅延タイミングを決定し、起動を開始する。
【0095】
図11は、用紙種類や温度・湿度を考慮して転写画像と用紙の位置合わせを補正する場合の動作を示すフローチャートである。
【0096】
図11において、ステップS11では、用紙が厚紙か否かを判断し、用紙が厚紙でなければ(ステップS11でNO)、ステップS22で電力削減のためにエンコーダ30の電力をカットし、ステップS23で、補正制御を行なわずにタイミングローラ31、32を起動してから、終了する。
【0097】
用紙が厚紙であれば(ステップS11でYES)、ステップS12では、湿度が70%以上か否かを判断し、湿度が70%以上あれば(ステップS12でYES)、ステップS22に進み、電力削減のためにエンコーダ30の電力をカットする。湿度が70%以上でなければ(ステップS12でNO)、ステップS13に進む。
【0098】
ステップS13では、給紙部5から給紙された用紙Mが搬送ローラ7A、8A等により搬送中であるが、前記タイミングローラ駆動用モータ33(330)は停止している。ステップS14では、搬送中の用紙Mの先端がタイミングセンサ34で検知されると、一定時間経過後、搬送が停止され、一定の停止期間エンコーダ30のパルス量(数)をカウントする。
【0099】
ステップS15では、用紙Mの搬送駆動が終了した否かを判断し、用紙Mの搬送駆動が終了していなければ(ステップS15でNO)、ステップS14に戻って駆動終了を待つ。用紙Mの搬送駆動が終了すれば(ステップS15でYES)、ステップS16では、前記エンコーダ30のパルス量(数)のカウント値の判定を行う。
【0100】
ステップS17では、エンコーダ30のパルス量(数)のカウント値が0から増えているか否か(カウント値>0)を判断し、カウント値>0でなければ(ステップS17でNO)、ステップS23に進み、補正せずにタイミングローラ31、32を起動してから終了する。カウント値>0であれば(ステップS17でYES)、ステップS18に進む。
【0101】
ステップS18では、カウント値(パルス数)から用紙Mの飛び出し量Dを演算し、ステップS19では、ローラ耐久回数より耐久係数αを算出し、ステップS20では、耐久係数αも考慮して用紙Mの飛び出し量Dを、用紙Mの飛び出し距離=エンコーダ30のパルス数×0.1×坪量係数×耐久係数αの式にて補正した後、ステップS21で、補正後の飛び出し量Dから前記遅延タイミングを決定し、起動を開始する。
【0102】
図12は、タイミングローラ駆動用モータ33(330)の起動速度を遅くして、転写画像と用紙の位置合わせを補正する場合の動作を示すフローチャートである。
【0103】
図12において、ステップS31では、給紙部5から給紙された用紙Mが搬送ローラ7A、8A等により搬送中であるが、前記タイミングローラ駆動用モータ33(330)は停止している。ステップS32では、搬送中の用紙Mの先端がタイミングセンサ34で検知されると、一定時間経過後、搬送が停止され、一定の停止期間エンコーダ30のパルス量(数)をカウントする。
【0104】
ステップS33では、用紙Mの搬送駆動が終了した否かを判断し、用紙Mの搬送駆動が終了していなければ(ステップS33でNO)、ステップS32に戻って駆動終了を待つ。用紙Mの搬送駆動が終了すれば(ステップS33でYES)、ステップS34では、前記エンコーダ30のパルス量(数)のカウント値の判定を行う。
【0105】
ステップS35では、エンコーダ30のパルス量(数)のカウント値が0から増えているか否か(カウント値>0)を判断し、カウント値>0でなければ(ステップS35でNO)、ステップS39では、補正せずにタイミングローラ31、32を起動してから終了し、カウント値>0であれば(ステップS35でYES)、ステップS36に進む。
【0106】
ステップS36では、カウント値(パルス数)から用紙Mの飛び出し量Dを演算し、ステップS37では、用紙Mの飛び出し量Dからモータ位置補正値βをモータ制御部301の位置データから減算する(初期位置情報=0−モータ位置補正値β)。
【0107】
ステップS38では、タイミングモータ33(330)を通常起動よりも速度を遅くして起動する。
【0108】
図13は、画像形成のための静電潜像の書き込み動作のタイミングを遅らせることにより、転写画像と用紙の位置合わせを補正する場合の動作を示すフローチャートである。
【0109】
図13において、ステップS41では、給紙部5から給紙された用紙Mが搬送ローラ7A、8A等により搬送中であるが、前記タイミングローラ駆動用モータ33(330)は停止している。ステップS42では、搬送中の用紙Mの先端がタイミングセンサ34で検知されると、一定時間経過後、搬送が停止され、一定の停止期間エンコーダ30のパルス量(数)をカウントする。
【0110】
ステップS43では、用紙Mの搬送駆動が終了した否かを判断し、用紙Mの搬送駆動が終了していなければ(ステップS43でNO)、ステップS42に戻って駆動終了を待つ。用紙Mの搬送駆動が終了すれば(ステップS43でYES)、ステップS44では、前記エンコーダ30のパルス量(数)のカウント値の判定を行う。
【0111】
ステップS45では、エンコーダ30のパルス量(数)のカウント値が0から増えているか否か(カウント値>0)を判断し、カウント値>0でなければ(ステップS45でNO)、ステップS49では、補正せずにタイミングローラ31、32を起動してから終了し、カウント値>0であれば(ステップS45でYES)、ステップS46に進む。
【0112】
ステップS46では、カウント値(パルス数)から用紙Mの飛び出し量Dを演算し、ステップS47では、用紙Mの飛び出し量Dから遅延タイミングを決定し、画像の書き込みを開始する。
【0113】
ステップS48では、所定時間後、タイミングローラ駆動用モータ33(330)の起動を開始してから終了する。
【0114】
このように、この実施形態では、タイミングローラ31、32により用紙を画像に対して位置合わせする際には、タイミングローラ駆動用モータを励磁するホールド機能を使わず、タイミングローラ駆動用モータへの電力供給は遮断されているので、ホールド電力が要らずモータの電力消費が低減される。しかも、計測された用紙先端部のニップ部からの飛び出し量に基づいて用紙と画像との相対位置が補正されるから、従来と同様に、用紙の適正位置に画像を転写することができる。
【0115】
なお、以上の実施形態では、タイミングローラ駆動用モータ33(330)の起動タイミングの遅延、起動速度の減少、画像データの書き込みタイミングの遅延をそれぞれ独立して行うことにより、転写画像と用紙との相対的位置の補正を行ったが、これらの2つ以上を組み合わせても良く、転写画像と用紙の少なくとも一方の他方に対する相対的位置が補正されれば良い。
【符号の説明】
【0116】
5 給紙部
7A(7B、7C)、8A(8B、8C) 搬送ローラ
30 用紙飛び出し量計測手段(エンコーダ)
31、32 タイミングローラ
33(330) タイミングローラ駆動用モータ
34 タイミングセンサ
301 制御部
203 静電潜像書き込み用のレーザ
D 用紙の飛び出し量(距離)
M 用紙
P 書き込みタイミングずらし量
【特許請求の範囲】
【請求項1】
給紙部から給紙された用紙を搬送する搬送ローラと、
前記搬送ローラで搬送された用紙への画像の転写位置の上流側に設けられ、前記用紙を一旦停止させ、用紙へ転写される転写画像に対する用紙の位置合わせを行うタイミングローラと、
前記タイミングローラを回転駆動するとともに、前記用紙がタイミングローラに到達する際には電力供給が遮断されているモータと、
前記タイミングローラで停止した用紙の先端部のニップ部からの飛び出し量を計測する飛び出し量計測手段と、
前記飛び出し量計測手段により計測された飛び出し量に基づいて、前記転写画像と用紙の少なくとも一方の他方に対する相対的位置を補正する補正手段と、
を備えたことを特徴とする画像形成装置。
【請求項2】
前記補正手段は、飛び出し量計測手段により計測された飛び出し量に応じて、前記モータによるタイミングローラの起動タイミングを遅らせることにより、前記相対的位置を補正する請求項1に記載の画像形成装置。
【請求項3】
前記補正手段は、飛び出し量計測手段により計測された飛び出し量に応じて、前記モータによるタイミングローラの起動時の回転速度を所定期間遅くすることにより、前記相対的位置を補正する請求項1または2に記載の画像形成装置。
【請求項4】
前記補正手段は、飛び出し量計測手段により計測された飛び出し量に応じて、画像形成のための静電潜像の書き込み動作のタイミングを遅らせることにより、前記相対的位置を補正する請求項1〜3のいずれかに記載の画像形成装置。
【請求項5】
前記飛び出し量計測手段は、前記モータの回転数を検知してパルスを出力するエンコーダで構成されている請求項1〜4のいずれかに記載の画像形成装置。
【請求項6】
前記補正手段は、前記飛び出し量計測手段により計測された飛び出し量を、前記タイミングローラの耐久使用量に応じて補正する請求項1〜5のいずれかに記載の画像形成装置。
【請求項7】
用紙の種類によって前記飛び出しの発生しない用紙を補正不要用紙とし、前記補正手段は、該補正不要用紙に対しては前記転写画像と用紙の位置合わせの補正を行わない請求項1〜6のいずれかに記載の画像形成装置。
【請求項8】
前記補正手段は、前記補正不要用紙以外の用紙であっても、一定以上の高湿度条件である場合は、前記転写画像と用紙の位置合わせの補正を行わない請求項7に記載の画像形成装置。
【請求項9】
前記飛び出し量計測手段は、用紙の種類が補正不要用紙である場合、該補正不要用紙に対して用紙飛び出し量の計測を行わない請求項7または8に記載の画像形成装置。
【請求項10】
給紙部から給紙された用紙を搬送する搬送ローラと、
前記搬送ローラで搬送された用紙への画像の転写位置の上流側に設けられ、前記用紙を一旦停止させ、用紙へ転写される転写画像に対する用紙の位置合わせを行うタイミングローラと、
前記タイミングローラを回転駆動するモータと、
を備えた画像形成装置における転写画像と用紙の位置合わせ補正方法であって、
前記用紙がタイミングローラに到達する際には前記モータへの電力供給を遮断するステップと、
前記タイミングローラで停止した用紙の先端部のニップ部からの飛び出し量を計測する飛び出し量計測ステップと、
前記飛び出し量計測ステップにおいて計測された飛び出し量に基づいて、前記転写画像と用紙の少なくとも一方の他方に対する相対的位置を補正する補正ステップと、
を備えたことを特徴とする画像形成装置における転写画像と用紙の位置合わせ補正方法。
【請求項11】
給紙部から給紙された用紙を搬送する搬送ローラと、
前記搬送ローラで搬送された用紙への画像の転写位置の上流側に設けられ、前記用紙を一旦停止させ、用紙へ転写される転写画像に対する用紙の位置合わせを行うタイミングローラと、
前記タイミングローラを回転駆動するモータと、
を備えた画像形成装置のコンピュータに実行させるための転写画像と用紙の位置合わせ補正プログラムであって、
前記用紙がタイミングローラに到達する際には前記モータへの電力供給を遮断するステップと、
前記タイミングローラで停止した用紙の先端部のニップ部からの飛び出し量を計測する飛び出し量計測ステップと、
前記飛び出し量計測ステップにおいて計測された飛び出し量に基づいて、前記転写画像と用紙の少なくとも一方の他方に対する相対的位置を補正する補正ステップと、
を前記コンピュータに実行させる転写画像と用紙の位置合わせ補正プログラム。
【請求項1】
給紙部から給紙された用紙を搬送する搬送ローラと、
前記搬送ローラで搬送された用紙への画像の転写位置の上流側に設けられ、前記用紙を一旦停止させ、用紙へ転写される転写画像に対する用紙の位置合わせを行うタイミングローラと、
前記タイミングローラを回転駆動するとともに、前記用紙がタイミングローラに到達する際には電力供給が遮断されているモータと、
前記タイミングローラで停止した用紙の先端部のニップ部からの飛び出し量を計測する飛び出し量計測手段と、
前記飛び出し量計測手段により計測された飛び出し量に基づいて、前記転写画像と用紙の少なくとも一方の他方に対する相対的位置を補正する補正手段と、
を備えたことを特徴とする画像形成装置。
【請求項2】
前記補正手段は、飛び出し量計測手段により計測された飛び出し量に応じて、前記モータによるタイミングローラの起動タイミングを遅らせることにより、前記相対的位置を補正する請求項1に記載の画像形成装置。
【請求項3】
前記補正手段は、飛び出し量計測手段により計測された飛び出し量に応じて、前記モータによるタイミングローラの起動時の回転速度を所定期間遅くすることにより、前記相対的位置を補正する請求項1または2に記載の画像形成装置。
【請求項4】
前記補正手段は、飛び出し量計測手段により計測された飛び出し量に応じて、画像形成のための静電潜像の書き込み動作のタイミングを遅らせることにより、前記相対的位置を補正する請求項1〜3のいずれかに記載の画像形成装置。
【請求項5】
前記飛び出し量計測手段は、前記モータの回転数を検知してパルスを出力するエンコーダで構成されている請求項1〜4のいずれかに記載の画像形成装置。
【請求項6】
前記補正手段は、前記飛び出し量計測手段により計測された飛び出し量を、前記タイミングローラの耐久使用量に応じて補正する請求項1〜5のいずれかに記載の画像形成装置。
【請求項7】
用紙の種類によって前記飛び出しの発生しない用紙を補正不要用紙とし、前記補正手段は、該補正不要用紙に対しては前記転写画像と用紙の位置合わせの補正を行わない請求項1〜6のいずれかに記載の画像形成装置。
【請求項8】
前記補正手段は、前記補正不要用紙以外の用紙であっても、一定以上の高湿度条件である場合は、前記転写画像と用紙の位置合わせの補正を行わない請求項7に記載の画像形成装置。
【請求項9】
前記飛び出し量計測手段は、用紙の種類が補正不要用紙である場合、該補正不要用紙に対して用紙飛び出し量の計測を行わない請求項7または8に記載の画像形成装置。
【請求項10】
給紙部から給紙された用紙を搬送する搬送ローラと、
前記搬送ローラで搬送された用紙への画像の転写位置の上流側に設けられ、前記用紙を一旦停止させ、用紙へ転写される転写画像に対する用紙の位置合わせを行うタイミングローラと、
前記タイミングローラを回転駆動するモータと、
を備えた画像形成装置における転写画像と用紙の位置合わせ補正方法であって、
前記用紙がタイミングローラに到達する際には前記モータへの電力供給を遮断するステップと、
前記タイミングローラで停止した用紙の先端部のニップ部からの飛び出し量を計測する飛び出し量計測ステップと、
前記飛び出し量計測ステップにおいて計測された飛び出し量に基づいて、前記転写画像と用紙の少なくとも一方の他方に対する相対的位置を補正する補正ステップと、
を備えたことを特徴とする画像形成装置における転写画像と用紙の位置合わせ補正方法。
【請求項11】
給紙部から給紙された用紙を搬送する搬送ローラと、
前記搬送ローラで搬送された用紙への画像の転写位置の上流側に設けられ、前記用紙を一旦停止させ、用紙へ転写される転写画像に対する用紙の位置合わせを行うタイミングローラと、
前記タイミングローラを回転駆動するモータと、
を備えた画像形成装置のコンピュータに実行させるための転写画像と用紙の位置合わせ補正プログラムであって、
前記用紙がタイミングローラに到達する際には前記モータへの電力供給を遮断するステップと、
前記タイミングローラで停止した用紙の先端部のニップ部からの飛び出し量を計測する飛び出し量計測ステップと、
前記飛び出し量計測ステップにおいて計測された飛び出し量に基づいて、前記転写画像と用紙の少なくとも一方の他方に対する相対的位置を補正する補正ステップと、
を前記コンピュータに実行させる転写画像と用紙の位置合わせ補正プログラム。
【図1】



【図2】
【図3】
【図4】

【図5】
【図6】

【図7】

【図8】
【図9】

【図10】
【図11】

【図12】
【図13】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【公開番号】特開2013−105110(P2013−105110A)
【公開日】平成25年5月30日(2013.5.30)
【国際特許分類】
【出願番号】特願2011−250193(P2011−250193)
【出願日】平成23年11月15日(2011.11.15)
【出願人】(303000372)コニカミノルタビジネステクノロジーズ株式会社 (12,802)
【Fターム(参考)】
【公開日】平成25年5月30日(2013.5.30)
【国際特許分類】
【出願日】平成23年11月15日(2011.11.15)
【出願人】(303000372)コニカミノルタビジネステクノロジーズ株式会社 (12,802)
【Fターム(参考)】
[ Back to top ]