
画像形成装置、記録媒体推進力補助方法、プログラムおよびプログラム記録媒体
【課題】記録媒体が転写手段の圧接部に突入する際に発生する像担持体の回転負荷を抑制して像担持体の速度変動を抑え、画像劣化を防止することができる画像形成装置を提供すること。
【解決手段】トナー画像を担持する中間転写ベルト6と、中間転写ベルト6が担持するトナー画像を記録媒体に圧接して転写する2次転写ローラ10と、記録媒体を2次転写ローラ10に搬送するレジストローラ対8と、レジストローラ対8によって搬送される記録媒体の推進力を補助するとともに、中間転写ベルト6にかかる外乱トルクを補正する力を発生する記録媒体推進力制御ローラ210と、を備えた。
【解決手段】トナー画像を担持する中間転写ベルト6と、中間転写ベルト6が担持するトナー画像を記録媒体に圧接して転写する2次転写ローラ10と、記録媒体を2次転写ローラ10に搬送するレジストローラ対8と、レジストローラ対8によって搬送される記録媒体の推進力を補助するとともに、中間転写ベルト6にかかる外乱トルクを補正する力を発生する記録媒体推進力制御ローラ210と、を備えた。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、像担持体上の可視像を記録媒体上に転写する転写手段を備えた画像形成装置に関する。
【背景技術】
【0002】
従来、この種の画像形成装置においては、記録媒体が転写手段の圧接部に突入する際に、衝撃的に、像担持体である中間転写ベルトに回転負荷が加わり、結果的に像担持体の速度変動となることから、画像劣化が生じていた。
【0003】
この画像劣化を抑えるために、記録媒体が転写手段の圧接部に突入する際に記録媒体を加速して回転負荷を低減することで、像担持体の速度変動を抑制するようにした技術が知られている(例えば、特許文献1、2参照)。
【0004】
特許文献1に記載のものは、記録媒体をこの記録媒体先端が圧接部に到達するまでは所定の加速度で搬送させ、記録媒体の先端が圧接部に到達するタイミングで加速度をゼロにして記録媒体の速度を等速にする速度制御手段を有している。
【0005】
また、特許文献2に記載のものは、トナー画像を担持する像担持体と、像担持体に圧接させた圧接部においてトナー画像を記録紙に転写する転写ローラと、記録紙を搬送する搬送ローラ対と、圧接部と搬送ローラ対との間に設けられ、搬送ローラ対によって搬送された記録紙の搬送速度を加速する記録媒体加速ローラ対と、を備え、記録媒体加速ローラ対は、記録紙圧接部に突入するときに、記録紙の搬送速度を加速するようになっている。
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかしながら、特許文献1に記載の技術においては、2次転写突入時に記録媒体を加速することで、回転負荷を低減できるようになっているが、記録媒体を加速するために記録媒体搬送用のレジストローラを用いているために、記録媒体の加速力が不足してしまい、回転負荷を十分に低減することができないという問題があった。
【0007】
また、特許文献2に記載の技術においては、レジストローラの他に記録媒体加速ローラ対を備えることにより特許文献1の問題を補っているが、記録媒体を所定の速度よりも速い速度に加速することで回転負荷を低減させているため、記録媒体の通常速度での駆動と切り替える必要があり、従って、各ローラを接離するための装置が必要になるという問題や、記録媒体の厚さに応じた加速データを予め設定して保持しておかなければならないという問題があった。
【0008】
本発明はこのような問題を解決するためになされたもので、記録媒体をレジストローラで通常速度で駆動しつつ、記録媒体に推進力を加え、かつ、必要な記録媒体の厚さに応じた推進力を自動的に与えることにより、記録媒体が転写手段の圧接部に突入する際に発生する像担持体の回転負荷を抑制して像担持体の速度変動を抑え、画像劣化を防止することができる画像形成装置を提供するものである。
【課題を解決するための手段】
【0009】
本発明に係る画像形成装置は、トナー画像を担持する像担持体と、前記像担持体が担持するトナー画像を記録媒体に圧接して転写する転写手段と、前記記録媒体を前記転写手段に搬送する記録媒体搬送手段と、前記記録媒体搬送手段によって搬送される記録媒体の推進力を補助するとともに、前記像担持体にかかる外乱トルクを補正する力を発生する記録媒体推進力補助手段と、を備えたことを特徴とする。
【発明の効果】
【0010】
本発明によれば、記録媒体が転写手段の圧接部に突入する際に発生する像担持体の回転負荷を抑制して像担持体の速度変動を抑え、画像劣化を防止することができる。
【図面の簡単な説明】
【0011】
【図1】本発明の一実施の形態に係る画像形成装置の画像形成部を示す概略構成図である。
【図2】本発明の一実施の形態に係る画像形成装置の中間転写ユニットの駆動制御を説明する図である。
【図3】本発明の一実施の形態に係る画像形成装置の制御装置による中間転写ベルトの駆動制御系を説明する図である。
【図4】本発明の一実施の形態に係る画像形成装置のモータ角速度検出用エンコーダからのエンコーダ出力と基準クロックCLKとを示す説明図である。
【図5】本発明の一実施の形態に係る画像形成装置のモータ角速度を検出するためにマイクロプロセッサが実行する割り込みルーチンを示すフローチャートである。
【図6】本発明の一実施の形態に係る画像形成装置の中間転写ユニットの駆動制御系において、中間転写ベルトに加わるトルク変動を外乱として同定するための2慣性系の解析モデル、およびその結果に基づき記録媒体へ補助推進力を与えることを説明する説明図である。
【図7】本発明の一実施の形態に係る画像形成装置の記録媒体推進力付加制御量設定部の制御ブロック図である。
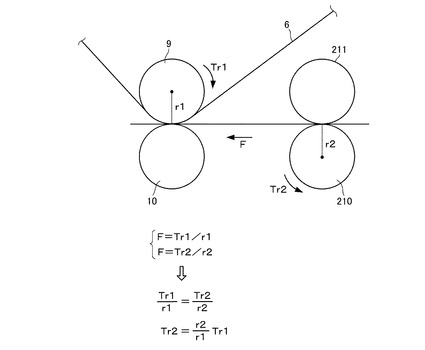
【図8】本発明の一実施の形態に係る画像形成装置の記録媒体推進力制御ローラのトルクの算出工程を示す図である。
【図9】本発明の一実施の形態に係る駆動制御のためのプログラムの実行に使用可能なコンピュータを示す図である。
【発明を実施するための形態】
【0012】
以下、本発明の実施の形態について、図面を参照して説明する。
【0013】
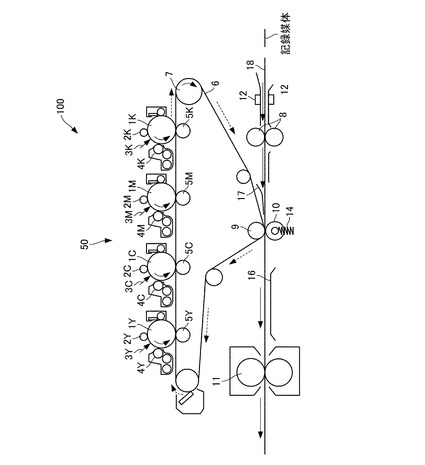
図1は、一実施の形態に係る画像形成装置の画像形成部を示す概略構成図であり、画像形成装置は例えば複写機として構成されている。
【0014】
図1に示すように、画像形成装置100は、イエロー(Y)、シアン(C)、マゼンタ(M)、黒(K)の色ごとに潜像担持体としての感光体を個別に備えたタンデム型の画像形成部50を備えている。
【0015】
図中には、各色に対応する部材にはその符号にY、C、M、Kの色分け符号を添え字してあるが、各色の部材は互いに実質的には同一構成であるため、文中では色分け符号を省略する。
【0016】
感光体1は、帯電装置2により、表面が一様な電位となるように帯電され、露光部にて、形成する画像情報に基づき画像部/非画像部とを分けて、書き込み露光3が行われることで、表面に静電潜像が形成される。
【0017】
感光体1の表面の静電潜像の画像部には、現像装置4による現像処理によってトナーが付着し、トナー像(画像)が形成される。トナー像はその後、1次転写部で、1次転写ローラ5に印加したバイアスの作用により、像担持体としての中間転写ベルト6に転写される。
【0018】
各感光体1は、中間転写ベルト6の表面移動経路上に、中間転写ベルト6に接して並んでおり、各感光体1上に形成されたトナー像は、各1次転写部で、順番に位置を合わせるようにして、中間転写ベルト6に転写される。
【0019】
中間転写ベルト6は駆動ローラ7を含む複数のローラに張架され駆動されている。駆動ローラ7は後述する駆動源である駆動モータにより回転駆動されている。
【0020】
中間転写ベルト6上に形成されたフルカラーのトナー像は、2次転写部で搬送経路18を図1に示す矢印の方向に搬送される記録媒体(転写紙)上に転写される。記録媒体は、画像形成装置の給紙部より搬送されてきて、レジストローラ対8にて先端位置を調整されて、2次転写部へ送られる。
【0021】
2次転写部では、中間転写ベルト6の外側に配置された2次転写ローラ10と、ベルトの内側の2次転写対向ローラ9とで転写ニップが形成され、その転写ニップ内に電界を形成して記録媒体にトナー像を転写する。
【0022】
2次転写ローラ10の軸は、加圧バネ14の加圧力によって、2次転写ローラ10が2次転写対向ローラ9に対して加圧される方向に付勢されている。2次転写ローラ10は、中間転写ベルト6の方向に加圧され、中間転写ベルト6または記録媒体に接触しながら回転する。トナー像が転写された記録媒体は、定着装置11を通過し、加熱、加圧により、トナー像が記録媒体上に定着される。
【0023】
このような画像形成工程においては、感光体1、中間転写ベルト6が一定の速度で駆動されていることが重要である。感光体1に速度変動があると、画像が伸び縮みするために、速度変動が微小であっても一定の画像濃度であるべき部分に濃淡が生じる。
【0024】
また、感光体1の回転速度が一定に維持されていても、中間転写ベルト6の速度に変動がある場合には、1次転写部分で、感光体1との間で速度差が生じることから、同様に、画像の伸び縮み、濃淡が生じてしまう。
【0025】
特に、2次転写部の転写ニップに記録媒体の先端が侵入するときの衝撃により中間転写ベルト6に瞬間的な負荷が生じ、中間転写ベルト6に速度変動が生じると、画質が大きく劣化する。
【0026】
以下、2次転写部の転写ニップに記録媒体の先端が侵入するときの衝撃による画質劣化を抑制する方法について説明する。
【0027】
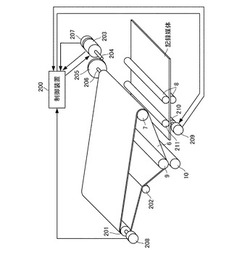
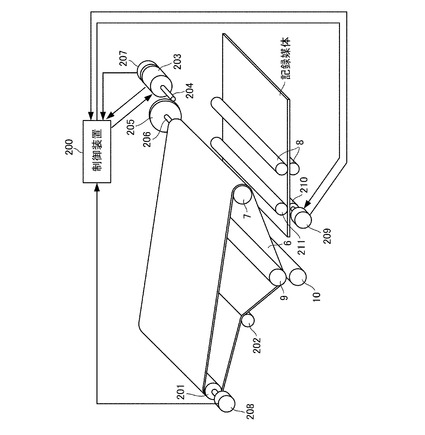
図2は、本実施の形態における中間転写ユニットの駆動制御に関わる構成を示す説明図である。ここでは、中間転写ユニットとは、中間転写ベルト駆動系と、記録媒体搬送系のことを言う。
【0028】
本実施の形態では、駆動ローラ7および従動ローラ9、201、202に掛け渡されている無端状のベルトからなる像担持体である中間転写ベルト6を等速駆動するように、駆動源であるDCモータ203および記録媒体推進力制御手段としての補助モータ209を制御する。
【0029】
なお、図2に示しているように、駆動ローラ7、従動ローラ9、201は同一の径で構成されている。DCモータ203の回転トルク(駆動力)は、2つの歯車204、205からなる歯車減速機構から駆動ローラ7の回転軸206に伝達され、これにより駆動ローラ7が回転駆動して中間転写ベルト6が表面移動する。
【0030】
DCモータ203に対するフィードバック制御(モータ定速制御)は、DCモータ203の出力軸に配置されたモータ角速度検出用エンコーダ207の出力に基づき、駆動制御手段としての制御装置200にて行われる。
【0031】
また、中間転写ベルト6を支持する従動ローラ201の回転軸には、図示しないカップリングを介した従動ローラ角速度検出用エンコーダ208が取り付けられている。
【0032】
記録媒体の搬送のために、レジストローラ対8が設けられており、図示しない駆動系により駆動されている。レジストローラ対8と2次転写ローラ10の間には、記録媒体推進力制御ローラ210およびその対向ローラ211が配置されており、記録媒体推進力制御ローラ210には、図示しない剛性の高いジョイントで、制動手段としての補助モータ209が取り付けられている。
【0033】
この補助モータ209は、記録媒体推進力制御ローラ210に与える駆動力の大きさが制御装置200により制御できるものであり、例えば電流コントローラを用いて駆動電流を制御することにより、記録媒体に対して、加速方向の駆動トルクと減速方向の負荷トルクを付加できるDCモータを利用することができる。
【0034】
なお、補助モータ209としては、中間転写ベルト6に対して駆動力(駆動トルク)を付与するものであって、その駆動力の大きさを制御装置200により多段階で制御できるものであれば、どのようなものであってもよい。
【0035】
さらに配置する位置も、レジストローラ対8と2次転写ローラ10の間である必要はなく、記録媒体が2次転写ローラに当たる際に、記録媒体部に当たる位置であれば、レジストローラ対8の手前(上流側)であっても構わない。
【0036】
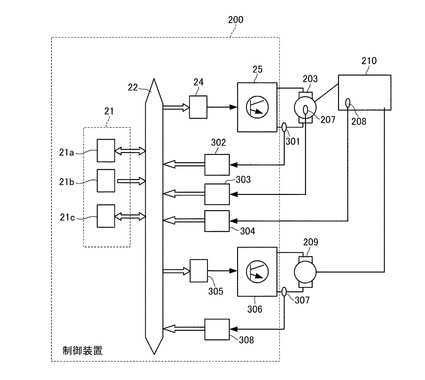
図3は、本実施の形態における制御装置200による中間転写ベルト6の駆動制御系を説明するためのハードウェアブロック図である。
【0037】
本実施の形態における中間転写ユニットの駆動制御系は、レジストローラ対8の駆動を含め3つのフィードバック制御系に大別できる。レジストローラ対8の駆動は、特別な制御は不要のため、DCモータもしくは、パルスモータを用いた通常の速度制御である。そこで、ここでの説明は省略する。
【0038】
第2のフィードバック制御系は、モータ角速度検出用エンコーダ207の出力信号に基づいて中間転写ベルト6の駆動源であるDCモータ203の角速度(以下「モータ角速度」という。)をフィードバック制御するモータ定速制御系である。
【0039】
第3のフィードバック制御系は、推定用パラメータであるDCモータ203の駆動電流(駆動入力値)と、推定用パラメータであるモータ角速度と、推定用パラメータである中間転写ベルト6の従動ローラ角速度(以下「従動ローラ角速度」という。)と、後述する解析モデルとから、トルク変動量推定手段としての後述する外乱推定器により、中間転写ベルト6に加わるトルク変動量を推定し、その推定結果に基づいて補助モータ209をトルク制御するトルク制御系である。
【0040】
本実施の形態における中間転写ユニットの駆動制御系は、マイクロコンピュータ21、バス22、モータ駆動用インターフェイス装置24、DCモータ203を駆動させるモータ駆動装置25、検知手段としてのモータ駆動電流検出装置301、検知手段としてのモータ角速度検出用エンコーダ207、検知手段としての従動ローラ角速度検出用エンコーダ208、これらの検出用インターフェイス装置302、303、304、記録媒体推進力制御用補助モータ駆動インターフェイス装置305、補助モータ209を駆動させる補助モータ駆動装置306、補助モータ駆動電流検出装置307、補助モータ駆動電流検出用インターフェイス装置308などから構成されている。
【0041】
マイクロコンピュータ21は、マイクロプロセッサ21a、リードオンリメモリ(ROM)21b、ランダムアクセスメモリ(RAM)21c等で構成されている。これらのマイクロプロセッサ21a、リードオンリメモリ(ROM)21b、ランダムアクセスメモリ(RAM)21c等はそれぞれバス22を介して接続されている。
【0042】
DCモータ203の出力軸に取り付けられたモータ角速度検出用エンコーダ207は、制御装置200のモータ角速度検出用インターフェイス装置303に接続されている。このモータ角速度検出用インターフェイス装置303は、モータ角速度検出用エンコーダ207の出力を処理してデジタル値に変換するものである。
【0043】
詳しくは、モータ角速度検出用エンコーダ207から出力されるパルス数を計数するカウンタを備え、このパルス数に対応するモータ角速度を示すデジタル値を、バス22を介してマイクロコンピュータ21に送る。
【0044】
モータ駆動用インターフェイス装置24は、マイクロコンピュータ21によるDCモータ駆動制御入力演算結果を示すデジタル値に基づいて、モータ駆動装置25を構成するパワー半導体(例えばトランジスタ)を動作させるパルス状の駆動信号(駆動電圧)を生成する。
【0045】
DCモータ203は、パルス状の駆動電圧が印加されることで、これに応じた角速度で駆動する。DCモータ203に流れる駆動電流は、例えば電流プローブ等で構成されるモータ駆動電流検出装置301により検出される。
【0046】
検出された電流値は、A/D変換装置等で構成されているモータ駆動電流検出用インターフェイス装置302を介してマイクロコンピュータ21に取り込まれる。
【0047】
従動ローラ角速度検出用エンコーダ208は、上述したように、中間転写ベルト6を支持する従動ローラ201の回転軸に取り付けられており、制御装置200の従動ローラ角速度検出用インターフェイス装置304に接続されている。
【0048】
この従動ローラ角速度検出用インターフェイス装置304は、上述したモータ角速度検出用インターフェイス装置303と同様の構成であり、従動ローラ角速度検出用エンコーダ208の出力を処理してデジタル値に変換するものである。
【0049】
詳しくは、従動ローラ角速度検出用エンコーダ208から出力されるパルス数を計数するカウンタを備え、このパルス数に対応する従動ローラ201の角速度を示すデジタル値を、バス22を介してマイクロコンピュータ21に送る。
【0050】
補助モータ駆動用インターフェイス装置305は、マイクロコンピュータ21による駆動トルク変動量の推定結果を目標電流値に換算し、この換算結果と、補助モータ駆動電流検出装置307により検出される駆動電流値を用いたマイクロコンピュータ21による補正制御量演算結果(後述)すなわち電流制御系のデジタル値とに基づいて、補助モータ駆動装置306を構成するパワー半導体(例えばトランジスタ)を動作させるパルス状の駆動信号(駆動電圧)を生成する。
【0051】
補助モータ209は、パルス状の駆動電圧が印加されることで、これに応じた角速度で駆動するが、制御されているのはあくまでもトルクである。補助モータ209に流れる駆動電流は、電流プローブ等からなる補助モータ駆動電流検出装置307により検出される。
【0052】
検出された駆動電流値は、検出された電流値は、A/D変換装置等で構成されている補助モータ駆動電流検出用インターフェイス装置308を介してマイクロコンピュータ21に取り込まれる。
【0053】
本実施の形態において、マイクロコンピュータ21は、中間転写ベルト6の駆動制御系の解析モデルとして、駆動伝達系に最大の影響を与えるバネ特性を付与する特定駆動伝達部材としての2つの歯車204、205からなる歯車減速機構を境にDCモータ203の側と中間転写ベルト6の側とをそれぞれ1つの慣性系とし、DCモータ203の側の慣性系を示すモータ部と中間転写ベルト6の側の慣性系を示す転写ユニット部とを、2つの歯車204、205からなる歯車減速機構を含むねじりばね部で連結した2慣性系の解析モデルを用いて、中間転写ベルト6に生じる駆動負荷トルクの変動量をリアルタイムで(厳密には単位サンプリング時間分だけ遅れて)算出する。
【0054】
詳しくは、この解析モデルに基づき、マイクロコンピュータ21は、後述の外乱推定器として機能して、モータ駆動電流検出装置301で検出されるDCモータ203の駆動電流、モータ角速度検出用エンコーダ207で検出されるモータ角速度、従動ローラ角速度検出用エンコーダ208で検出される従動ローラ角速度から、中間転写ベルト6に生じているトルク変動をリアルタイムで推定する。
【0055】
そして、この推定結果を基に、その推定に係るトルク変動プロファイルをキャンセルする補助モータ209の制御量を決定し、その制御量を補助モータ駆動用インターフェイス装置305を介して補助モータ駆動装置306に与える。
【0056】
これにより、補助モータ209がその制御量に従った駆動力(駆動トルク)を記録媒体に加える。その結果、記録媒体が2次転写部の転写ニップに進入する時の衝撃が中間転写ベルト6に加わっても、トルク変動を補正する推進力を記録媒体を介して与えられるので中間転写ベルト6のベルト速度は変動せずに一定速度を保つことができる。
【0057】
この際、記録媒体への補助モータ209による推進力付与と、レジストローラ対8による等速度駆動は同時に行うことが可能なので、両者の駆動を切り替える必要はない。
【0058】
ここで、角速度を検出する方法、すなわち、モータ角速度検出用エンコーダ207の出力を処理するモータ角速度検出用インターフェイス装置303と、従動ローラ角速度検出用エンコーダ208の出力を処理する従動ローラ角速度検出用インターフェイス装置304の処理方法について説明する。
【0059】
これらの検出用インターフェイス装置303、304の機能は互いに同じなので、以下、モータ角速度検出用インターフェイス装置303を例に挙げて説明する。
【0060】
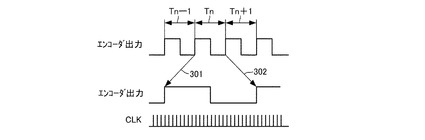
図4は、モータ角速度検出用エンコーダ207からのエンコーダ出力と基準クロックCLKとを示す説明図である。
【0061】
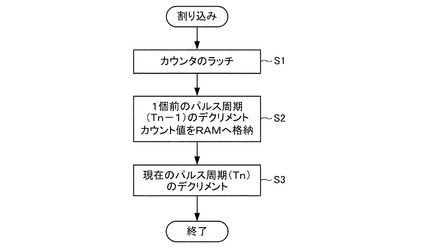
図5は、モータ角速度を検出するためにマイクロプロセッサ21aが実行する割り込みルーチンを示すフローチャートである。
【0062】
モータ角速度検出用インターフェイス装置303は、その出力がマイクロプロセッサ21aの割り込みに接続されており、また、基準クロックCLKをカウントするタイマーを備えている。
【0063】
図4において、エンコーダ出力パルスのエッジE1が到達する直前の状態から説明する。モータ角速度検出用インターフェイス装置303に設けられるカウンタ(例えば16進カウンタ)は、エンコーダ出力パルスを基準クロックCLKをもとに、与えられたカウント値(例えば0FFFFH)からデクリメントカウント処理を実行する。
【0064】
エッジE1がマイクロプロセッサ21aの割り込みへ到達すると、図5に示す割り込みルーチンが実行される。割り込みルーチンが開始されると、カウンタのデクリメントカウント値が、モータ角速度検出用インターフェイス装置303の内蔵レジスタにラッチされる(ステップS1)。
【0065】
次に、ラッチされたデクリメントカウント値を、図3に示したランダムアクセスメモリ21cへ格納する(ステップS2)。そして、Tnのパルス周期をカウントするためのカウント初期値(0FFFFH)を与え、再度デクリメントカウントを開始し(ステップS3)、割り込みの処理を終了する。そして、次のエッジE2を検出したら、再びステップS1〜ステップS3の処理を繰り返す。
【0066】
パルスTnにおける速度V(i)は、次に示す数式1から求められる。
【数1】

【0067】
ここで、「Tclk」は基準クロックCLKの周期であり、「Ne」は単位角度当たりのエンコーダ分割数である。また、「n」、は基準クロックCLKのカウント数であり、本実施の形態では、(0FFFFH)−(デクリメントカウント数)に相当する。「k」は、速度への単位換算定数である。
【0068】
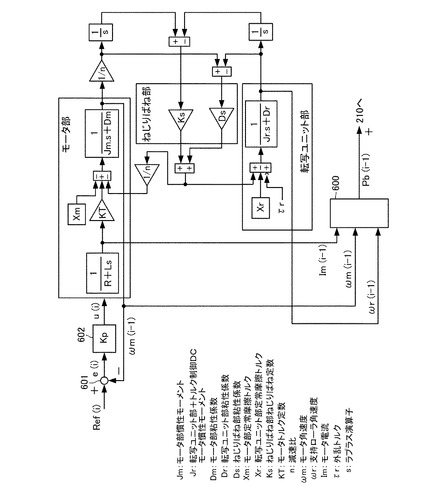
図6は、本実施の形態における中間転写ユニットの駆動制御系において、記録媒体の2次転写部突入時の中間転写ベルト6に加わるトルク変動を外乱として同定するための2慣性系の解析モデルおよび、その結果をもとに、記録媒体へ補助推進力を与えることを説明するための説明図である。
【0069】
上述したとおり、本実施の形態における中間転写ベルト6の駆動制御系は、モータ部と転写ユニット部とからなる2つの慣性系の間の軸部にジョイント部を想定した2慣性系モデルとして考えることができる。
【0070】
特に、本実施の形態において転写ユニット部を1つの慣性系として考えられる理由は、中間転写ベルト6の剛性が高く(弾性が低く)、かつ、中間転写ベルト6に加えるテンションが強いことから、中間転写ベルト6の表面移動とこれを支持する各支持ローラ7、9、201、202の回転はすべりのない剛体と考えてよいためである。
【0071】
また、ジョイント部の軸回りのねじりばね特性および粘性特性を1次共振要素として考慮する。また、中間転写ベルト6の駆動ローラ7の回転軸回りの粘性係数およびDCモータ203の出力軸回りの粘性係数をそれぞれの慣性系での減衰特性として考慮する。
【0072】
そして、このジョイント部は、実際に物理的に存在しない仮想的な一体軸のようなものを想定し、慣性のない、つまり、慣性モーメントを有さないものとして取り扱う。
【0073】
次に、図7に示す解析モデルにおける各パラメータを決定する方法の一例について説明する。
【0074】
まず、中間転写ベルト6の駆動制御系を設計するにあたって、図2で示すような中間転写ベルト6の駆動機構の試作機を作成し、実験において、その駆動制御系がフィードバック制御する対象となる入力をDCモータ203に入力される駆動電流とし、出力を中間転写ベルト6の駆動ローラ7の角速度までとする制御要素の周波数応答を測定する。
【0075】
次に、この入出力モデルの伝達関数を特定する。図6に示す解析モデルのパラメータのうち、モータ部の粘性係数Dm、モータ部の定常負荷Xm、転写ユニット部の粘性係数Dr、転写ユニット部の定常負荷Xr以外は、設計値から容易に算出可能である。
【0076】
したがって、前記4つのパラメータの算出方法の一例についてのみ以下説明する。
【0077】
モータ部の粘性係数Dmおよびモータ部の定常負荷Xmを算出する場合、まず、試作機などにおいて、モータ部単体で以下の実験を行う。
【0078】
一定電流でモータを駆動させた際のDCモータ203の駆動電流とモータ角速度を電流計およびタコジェネレータ等で実際に計測し、DCモータ203の駆動電流およびモータ角速度の時系列データを得る。
【0079】
モータ角速度の時系列データから、モータ部の機械的時定数を用いてモータ部の粘性係数Dmを算出し、回転運動の運動方程式よりモータ部の定常負荷Xmを算出する。
【0080】
つまり、モータ部に関しては、ギヤの慣性をもモータ軸に含めて考えて1つの慣性系(慣性モーメントは1つ)とみなし、モータ部の粘性係数Dmを1次遅れ要素と考えると、入力を駆動電流、出力をモータ角速度としたときの伝達関数Gm(s)および時定数Taは、それぞれ、下記の数式2および数式3に示すとおりである。
【0081】
ただし、下記の式において、「K」は1次遅れ系の比例定数であり、「s」はラプラス演算子であり、「Jm」はモータ部の慣性モーメントである。
【数2】
【数3】
【0082】
DCモータ203の回転を開始して時間Taを経過した時のモータ角速度は、その定常値(モータ回転開始から時間が十分に経った時のモータ角速度)の約63.2%に達することから逆算して、上述したモータ角速度の時系列データよりモータ部の機械的時定数Taを求め、既知のモータ部の慣性モーメントJmを代入して、モータ部の粘性係数Dmを算出する。
【0083】
そして、モータ部に関する回転運動の運動方程式より、モータ角速度の時系列データの最終値部分(定常値)のモータ角速度ωmを用いて慣性項を除くと、下記の数式4が得られ、この式からモータ部の粘性係数Dmを求めることができる。
【0084】
ただし、下記の数式4において、「Ke」はDCモータ203のトルク定数であり、「j」はDCモータの駆動電流である。
【数4】
【0085】
次に、転写ユニット部の粘性係数Drおよび転写ユニット部の定常負荷Xrを算出する場合は、例えば図3に示したような中間転写ユニット全体を用い、以下の実験を行う。
【0086】
転写ユニット部の粘性係数Drおよび転写ユニット部の定常負荷Xrを算出する場合、一定電流でモータを駆動させた際のDCモータ203の駆動電流とモータ角速度並びに駆動ローラ7の角速度を、それぞれ電流計、タコジェネレータ、エンコーダ等で実際に計測し、駆動ローラ7の角速度の時系列データを得る。
【0087】
そして、モータ部の場合と同様、機械的時定数を用いて転写ユニット部の粘性係数Drを算出し、回転運動の運動方程式より転写ユニット部の定常負荷Xrを算出する。
【0088】
つまり、モータ部と転写ユニット部で2慣性系とみなし、モータ部の粘性係数Dmおよび転写ユニット部の粘性係数Drを各慣性系での1次遅れ要素と考えると、入力をDCモータの駆動電流、出力を駆動ローラ7の角速度としたときの伝達関数Gr(s)および時定数(モータ部+転写ユニット部の機械的時定数)Tbは、それぞれ、下記の数式5および数式6に示すとおりである。
【0089】
ただし、下記の式において、「Jr」は転写ユニット部の慣性モーメントであり、nは減速比である。
【数5】
【数6】
【0090】
上述したモータ部の時定数Taの場合と同様に、駆動ローラ7の角速度の時系列データより時定数Tbを求め、既知の慣性モーメントJm、Jrと既に算出済みのモータ部の粘性係数Dmを用いて、転写ユニット部の粘性係数Drを算出する。
【0091】
そして、モータ部の場合と同様、転写ユニット部に関する回転運動の運動方程式より、駆動ローラ7の角速度の時系列データの最終値部分(定常値)の駆動ローラ7の角速度ωrを用いて慣性項を除くと、下記の数式7が得られ、この式から転写ユニット部の定常負荷Xrを求めることができる。
【数7】
【0092】
実験においてDCモータ203に入力される駆動電流から駆動ローラ7の角速度もしくは角変位までの伝達関数を求める。DCモータ203が決定されれば、モータ部のトルク定数Keが求まるので、DCモータ203のトルク定数KeをDCモータ203に入力した駆動電流値に乗じることにより、DCモータ203のトルクから駆動ローラ7の角速度もしくは角変位までの伝達関数が簡単に求められる。
【0093】
次に、図6に示す解析モデルにおけるジョイント部のねじりばね定数の算出について説明する。
【0094】
ジョイント部のねじりばね定数Ksは、ジョイント部の粘性係数Dsを無視した状態で求める。2慣性系の場合、ジョイント部の粘性係数Dsを無視すれば、1次共振周波数Fは、次の数式8で求められる。
【数8】
【0095】
この数式8の左辺をジョイント部のねじりばね定数Ksに変換すると、次の数式9が得られる。
【数9】
【0096】
したがって、実験により1次共振周波数Fを求め、この数式9に既知のモータ部の慣性モーメントJmおよび転写ユニット部の慣性モーメントJrを代入することで、ジョイント部のねじりばね定数Ksを算出することができる。
【0097】
なお、1次共振周波数Fは、周波数応答実測結果のゲイン線図のピーク値のうち最も低い周波数として求められる。
【0098】
このようにして、ねじりばね定数Ksが得られたら、次に、実測した1次共振の減衰特性と解析モデルによる1次共振の減衰特性とが略一致するように、ジョイント部の粘性係数Dsを決定する。1次共振の減衰特性とジョイント部の粘性係数Dsは1対1に対応している。
【0099】
よって、ジョイント部の粘性係数Dsを変えることで、1次共振の減衰特性も変わるため、ジョイント部の粘性係数Dsの値を変えてシミュレーションを行い、1次共振周波数付近の周波数について周波数応答実測結果と比較することで、ジョイント部の粘性係数Dsを決定することができる。
【0100】
また、図6に示す解析モデルのモータ制御部について説明する。
【0101】
図6において、モータ角速度検出用エンコーダ207の出力パルス信号を処理するモータ角速度検出用インターフェイス装置303から出力されるモータ角速度ωm(i−1)は、演算部(減算器)601に与えられる。
【0102】
この演算部601は、制御目標値(以下「目標モータ角速度」という。)ReF(i)と、DCモータ203のモータ角速度ωm(i−1)との差e(i)を算出する。この差e(i)は、制御コントローラ部602に入力される。
【0103】
制御コントローラ部602は、例えばP制御系で構成される。演算部601で算出されたe(i)は、比例定数Kpが乗じられてDCモータ203の駆動電圧u(i)が決定される。
【0104】
更に、この駆動電圧u(i)に基づいてモータ駆動用インターフェイス装置24およびモータ駆動装置25によりパルス状の駆動信号が生成され、この駆動信号によりDCモータ203が駆動される。
【0105】
なお、ここでは、制御コントローラ部602の一例としてP制御系を用いているが、これに限定されるものではない。また、上記演算のすべては、マイクロコンピュータ21内の数値演算で行われ、簡単に実現することができる。
【0106】
次に、図6に示す解析モデルの記録媒体推進力付加制御量設定部600について説明する。
【0107】
本実施の形態において、DCモータ203の駆動電流Im(i−1)、モータ角速度ωm(i−1)、および、中間転写ベルト6の従動ローラ角速度ωr(i−1)は、これらのパラメータから中間転写ベルト6を意味する中間転写ユニットを一つの慣性とみなした慣性体に生じるトルク変動である外乱τrを推定し、その推定値から外乱τrをキャンセルするための補助モータ209の記録媒体推進力(トルク)付加制御量を設定するための記録媒体推進力付加制御量設定部600に与えられる。
【0108】
この記録媒体推進力付加制御量設定部600の出力Pb(i−1)は、図3に示す補助モータ駆動用インターフェイス装置305を介して補助モータ駆動装置306に入力される。ここでいう外乱τrが、記録媒体の2次転写ニップ進入時に生じる中間転写ベルト6のトルク変動に相当する。
【0109】
補助モータ209により、記録媒体に加えられた推進力は、記録媒体を介して、中間転写ベルト6に加えられることになる。したがって、この外乱τrと補助モータ駆動装置306に入力される記録媒体推進力付加制御量設定部600の出力Pb(i−1)により与えられる推進力が一致していれば、補助モータ209が付与する記録媒体への付加推進力により、転写ユニット部内で外乱τrが相殺され、この外乱τrが他の部分に影響を与えることはない。
【0110】
すなわち、本解析モデルにおいて外乱τrは無視できるものとなり、記録媒体の2次転写ニップ進入時に生じる中間転写ベルト6のトルク変動が生じないことになる。これについては、図8を参照して詳細を説明する。
【0111】
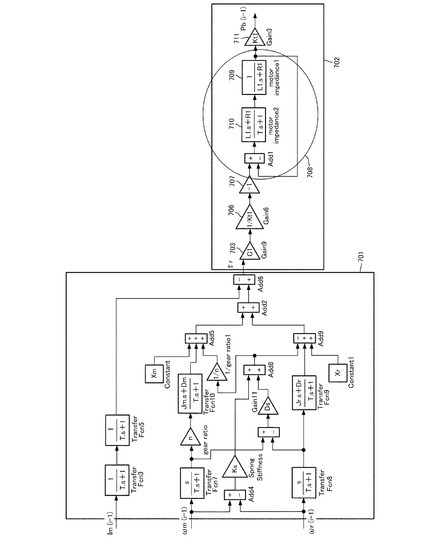
図7は、記録媒体推進力付加制御量設定部600の制御ブロック図である。
【0112】
この記録媒体推進力付加制御量設定部600は、図6に示した2慣性系の解析モデルを基にした外乱推定器701と、調整部702とから構成されている。図7において、「T」は、外乱推定器701を安定動作させるためのローパスフィルタの時定数であり、外乱推定器701は、2慣性モデルの逆システムに適当なローパスフィルタを加えた形で構成している。
【0113】
次に、調整部702について説明する。C1(ブロック703)は調整係数であり、中間転写の従動ローラ201にかかる外乱トルクτr'を記録媒体推進力制御ローラ210のトルクに換算するためのものである。
【0114】
具体的には、図8を参照して、外乱トルクを図8ではTr1、従動ローラ201の半径をr1、記録媒体の推進力をF、記録媒体推進力制御ローラ210の半径をr2、記録媒体推進力制御ローラ210に加えるトルクをTr2とすると、それらの関係は、幾何学的に図8に示したようになる。そこで、調整係数は、r2/r1となる。
【0115】
ブロック703の出力は、ブロック706に入力される。このブロック706は補助モータ209のトルク定数の逆数を与えるものであり、これにより外乱推定器701の出力τr'に補正係数をかけた結果を駆動電流値に変換する。
【0116】
ブロック706の出力は、ブロック707に入力される。補助モータ209により付与する駆動力の制御は、推定した駆動負荷トルク変動量のプロファイルとは正負反対で行うため、このブロックは−1の値を持つ。このブロック707の出力が補助モータ用の電流制御系708の目標電流になる。
【0117】
補助モータ209用の電流制御系708に含まれるブロック709は、補助モータ209のインピーダンス部分である。ブロック710は、補助モータ209用の電流制御系のフィードバックゲインである。
【0118】
ここでは、この系を安定させるために、フィードバックゲインの分子にモータインピーダンスの逆数を与え、ブロック710とブロック709とで、1次のローパスフィルタを構成する値に設定している。
【0119】
ブロック709の出力が補助モータ209の駆動電流であり、補助モータ駆動電流検出装置307および補助モータ駆動電流検出用インターフェイス装置308で計測され、フィードバックに用いられる。
【0120】
なお、記録媒体推進力付加制御量設定部600における演算処理は、すべて、上述した制御コントローラ部602と同様に、マイクロコンピュータ21内の数値演算で行われ、簡単に実現することができる。
【0121】
本実施の形態は、中間転写ベルト6の速度を従動ローラ201の角速度として計測したが、これ以外にも、中間転写ベルト6の速度を直接計測しても同様であり、また、中間転写ベルト6だけでなく、中間転写ドラムを用いた画像形成装置に適用しても、全く同様の効果が得られることは明らかである。
【0122】
なお、上記本発明における駆動制御はコンピュータを用いて実行することができる。図9は、上記本発明の駆動制御の実行に使用可能なコンピュータの一例であるパーソナルコンピュータ511の正面図である。
【0123】
パーソナルコンピュータ511に着脱可能なプログラム記録媒体512には、パーソナルコンピュータ511に制御のための演算、データ入出力等を実行させるためのプログラムが格納されている。
【0124】
パーソナルコンピュータ511は、このプログラム記録媒体512に格納されているプログラムを実行することにより、上記各実施の形態における駆動制御を実行することができる。
【0125】
プログラム記録媒体512としては、CD−ROM等の光ディスクやフレキシブルディスク等の磁気ディスクが挙げられる。また、上記プログラムは、記録媒体を用いずに通信ネットワークを介してパーソナルコンピュータ511に取り込むようにしてもよい。
【0126】
また、上記実施の形態で示したように上記駆動制御に用いるコンピュータとしてはマイクロコンピュータを用いることができる。このマイクロコンピュータは、上記転写装置や画像形成装置などに組み込んで用いられる。この場合の制御プログラムを格納する記録媒体としては、マイクロコンピュータ内のROMを用いることができる。
【0127】
以上のように、本実施の形態に係る画像形成装置100は、トナー画像を担持する中間転写ベルト6と、中間転写ベルト6が担持するトナー画像を記録媒体に圧接して転写する2次転写ローラ10と、記録媒体を2次転写ローラ10に搬送するレジストローラ対8と、レジストローラ対8によって搬送される記録媒体の推進力を補助するとともに、中間転写ベルト6にかかる外乱トルクを補正する力を発生する記録媒体推進力制御ローラ210と、を備えたことを特徴とする。
【0128】
この構成により、記録媒体が2次転写ローラ10の圧接部に突入する際に発生する中間転写ベルト6の回転負荷を抑制して中間転写ベルト6の速度変動を抑え、画像劣化を防止することができる。
【0129】
また、本実施の形態に係る画像形成装置100は、補正すべき中間転写ベルト6にかかる外乱トルクを推定するトルク変動推定手段を備え、このトルク変動推定手段は、中間転写ベルト6を駆動するDCモータ203の駆動電流と、DCモータ203の駆動角速度と、中間転写ベルト6の表面移動の位置、速度または角速度とを、推定用パラメータとして検知するモータ角速度検出用エンコーダ207、従動ローラ角速度検出用エンコーダ208、モータ駆動電流検出装置301、補助モータ駆動電流検出装置307と、DCモータ203から中間転写ベルト6への駆動伝達経路上に設けられる複数の駆動伝達部材の中で、駆動伝達経路の駆動伝達系に最も弱いバネ特性を付与する歯車204、205を境にDCモータ203側と中間転写ベルト6側とをそれぞれ駆動モータ側慣性系と中間転写ベルト側慣性系とし、かつ、駆動モータ側慣性系と中間転写ベルト側慣性系とを歯車204、205を含むねじりばね部で連結した2慣性系の解析モデルを用いて、中間転写ベルト6の負荷トルクの変動量を推定するマイクロコンピュータ21と、を有することを特徴とする。
【0130】
また、本実施の形態に係る画像形成装置100は、記録媒体推進力制御ローラ210が、2次転写ローラ10とレジストローラ対8との間で、記録媒体の推進力を補助することを特徴とする。
【符号の説明】
【0131】
1 感光体
6 中間転写ベルト(像担持体)
7 駆動ローラ
8 レジストローラ対(記録媒体搬送手段)
9 2次転写対向ローラ(転写手段)
10 2次転写ローラ(転写手段)
21 マイクロコンピュータ(外乱推定器)
24 モータ駆動用インターフェイス装置
25 モータ駆動装置
200 制御装置
201 従動ローラ
203 DCモータ(駆動モータ)
204、205 歯車(特定駆動伝達部材)
207 モータ角速度検出用エンコーダ(検知手段)
208 従動ローラ角速度検出用エンコーダ(検知手段)
209 補助モータ
210 記録媒体推進力制御ローラ(記録媒体推進力補助手段)
211 対向ローラ
301 モータ駆動電流検出装置(検知手段)
302 モータ駆動電流検出用インターフェイス装置
303 モータ角速度検出用インターフェイス装置
304 従動ローラ角速度検出用インターフェイス装置
305 補助モータ駆動用インターフェイス装置
306 補助モータ駆動装置
307 補助モータ駆動電流検出装置(検知手段)
308 補助モータ駆動電流検出用インターフェイス装置
511 パーソナルコンピュータ
512 プログラム記録媒体
600 記録媒体推進力付加制御量設定部
601 演算部
602 制御コントローラ部
701 外乱推定器
702 調整部
【先行技術文献】
【特許文献】
【0132】
【特許文献1】特許第4723984号公報
【特許文献2】特開2008−096640号公報
【技術分野】
【0001】
本発明は、像担持体上の可視像を記録媒体上に転写する転写手段を備えた画像形成装置に関する。
【背景技術】
【0002】
従来、この種の画像形成装置においては、記録媒体が転写手段の圧接部に突入する際に、衝撃的に、像担持体である中間転写ベルトに回転負荷が加わり、結果的に像担持体の速度変動となることから、画像劣化が生じていた。
【0003】
この画像劣化を抑えるために、記録媒体が転写手段の圧接部に突入する際に記録媒体を加速して回転負荷を低減することで、像担持体の速度変動を抑制するようにした技術が知られている(例えば、特許文献1、2参照)。
【0004】
特許文献1に記載のものは、記録媒体をこの記録媒体先端が圧接部に到達するまでは所定の加速度で搬送させ、記録媒体の先端が圧接部に到達するタイミングで加速度をゼロにして記録媒体の速度を等速にする速度制御手段を有している。
【0005】
また、特許文献2に記載のものは、トナー画像を担持する像担持体と、像担持体に圧接させた圧接部においてトナー画像を記録紙に転写する転写ローラと、記録紙を搬送する搬送ローラ対と、圧接部と搬送ローラ対との間に設けられ、搬送ローラ対によって搬送された記録紙の搬送速度を加速する記録媒体加速ローラ対と、を備え、記録媒体加速ローラ対は、記録紙圧接部に突入するときに、記録紙の搬送速度を加速するようになっている。
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかしながら、特許文献1に記載の技術においては、2次転写突入時に記録媒体を加速することで、回転負荷を低減できるようになっているが、記録媒体を加速するために記録媒体搬送用のレジストローラを用いているために、記録媒体の加速力が不足してしまい、回転負荷を十分に低減することができないという問題があった。
【0007】
また、特許文献2に記載の技術においては、レジストローラの他に記録媒体加速ローラ対を備えることにより特許文献1の問題を補っているが、記録媒体を所定の速度よりも速い速度に加速することで回転負荷を低減させているため、記録媒体の通常速度での駆動と切り替える必要があり、従って、各ローラを接離するための装置が必要になるという問題や、記録媒体の厚さに応じた加速データを予め設定して保持しておかなければならないという問題があった。
【0008】
本発明はこのような問題を解決するためになされたもので、記録媒体をレジストローラで通常速度で駆動しつつ、記録媒体に推進力を加え、かつ、必要な記録媒体の厚さに応じた推進力を自動的に与えることにより、記録媒体が転写手段の圧接部に突入する際に発生する像担持体の回転負荷を抑制して像担持体の速度変動を抑え、画像劣化を防止することができる画像形成装置を提供するものである。
【課題を解決するための手段】
【0009】
本発明に係る画像形成装置は、トナー画像を担持する像担持体と、前記像担持体が担持するトナー画像を記録媒体に圧接して転写する転写手段と、前記記録媒体を前記転写手段に搬送する記録媒体搬送手段と、前記記録媒体搬送手段によって搬送される記録媒体の推進力を補助するとともに、前記像担持体にかかる外乱トルクを補正する力を発生する記録媒体推進力補助手段と、を備えたことを特徴とする。
【発明の効果】
【0010】
本発明によれば、記録媒体が転写手段の圧接部に突入する際に発生する像担持体の回転負荷を抑制して像担持体の速度変動を抑え、画像劣化を防止することができる。
【図面の簡単な説明】
【0011】
【図1】本発明の一実施の形態に係る画像形成装置の画像形成部を示す概略構成図である。
【図2】本発明の一実施の形態に係る画像形成装置の中間転写ユニットの駆動制御を説明する図である。
【図3】本発明の一実施の形態に係る画像形成装置の制御装置による中間転写ベルトの駆動制御系を説明する図である。
【図4】本発明の一実施の形態に係る画像形成装置のモータ角速度検出用エンコーダからのエンコーダ出力と基準クロックCLKとを示す説明図である。
【図5】本発明の一実施の形態に係る画像形成装置のモータ角速度を検出するためにマイクロプロセッサが実行する割り込みルーチンを示すフローチャートである。
【図6】本発明の一実施の形態に係る画像形成装置の中間転写ユニットの駆動制御系において、中間転写ベルトに加わるトルク変動を外乱として同定するための2慣性系の解析モデル、およびその結果に基づき記録媒体へ補助推進力を与えることを説明する説明図である。
【図7】本発明の一実施の形態に係る画像形成装置の記録媒体推進力付加制御量設定部の制御ブロック図である。
【図8】本発明の一実施の形態に係る画像形成装置の記録媒体推進力制御ローラのトルクの算出工程を示す図である。
【図9】本発明の一実施の形態に係る駆動制御のためのプログラムの実行に使用可能なコンピュータを示す図である。
【発明を実施するための形態】
【0012】
以下、本発明の実施の形態について、図面を参照して説明する。
【0013】
図1は、一実施の形態に係る画像形成装置の画像形成部を示す概略構成図であり、画像形成装置は例えば複写機として構成されている。
【0014】
図1に示すように、画像形成装置100は、イエロー(Y)、シアン(C)、マゼンタ(M)、黒(K)の色ごとに潜像担持体としての感光体を個別に備えたタンデム型の画像形成部50を備えている。
【0015】
図中には、各色に対応する部材にはその符号にY、C、M、Kの色分け符号を添え字してあるが、各色の部材は互いに実質的には同一構成であるため、文中では色分け符号を省略する。
【0016】
感光体1は、帯電装置2により、表面が一様な電位となるように帯電され、露光部にて、形成する画像情報に基づき画像部/非画像部とを分けて、書き込み露光3が行われることで、表面に静電潜像が形成される。
【0017】
感光体1の表面の静電潜像の画像部には、現像装置4による現像処理によってトナーが付着し、トナー像(画像)が形成される。トナー像はその後、1次転写部で、1次転写ローラ5に印加したバイアスの作用により、像担持体としての中間転写ベルト6に転写される。
【0018】
各感光体1は、中間転写ベルト6の表面移動経路上に、中間転写ベルト6に接して並んでおり、各感光体1上に形成されたトナー像は、各1次転写部で、順番に位置を合わせるようにして、中間転写ベルト6に転写される。
【0019】
中間転写ベルト6は駆動ローラ7を含む複数のローラに張架され駆動されている。駆動ローラ7は後述する駆動源である駆動モータにより回転駆動されている。
【0020】
中間転写ベルト6上に形成されたフルカラーのトナー像は、2次転写部で搬送経路18を図1に示す矢印の方向に搬送される記録媒体(転写紙)上に転写される。記録媒体は、画像形成装置の給紙部より搬送されてきて、レジストローラ対8にて先端位置を調整されて、2次転写部へ送られる。
【0021】
2次転写部では、中間転写ベルト6の外側に配置された2次転写ローラ10と、ベルトの内側の2次転写対向ローラ9とで転写ニップが形成され、その転写ニップ内に電界を形成して記録媒体にトナー像を転写する。
【0022】
2次転写ローラ10の軸は、加圧バネ14の加圧力によって、2次転写ローラ10が2次転写対向ローラ9に対して加圧される方向に付勢されている。2次転写ローラ10は、中間転写ベルト6の方向に加圧され、中間転写ベルト6または記録媒体に接触しながら回転する。トナー像が転写された記録媒体は、定着装置11を通過し、加熱、加圧により、トナー像が記録媒体上に定着される。
【0023】
このような画像形成工程においては、感光体1、中間転写ベルト6が一定の速度で駆動されていることが重要である。感光体1に速度変動があると、画像が伸び縮みするために、速度変動が微小であっても一定の画像濃度であるべき部分に濃淡が生じる。
【0024】
また、感光体1の回転速度が一定に維持されていても、中間転写ベルト6の速度に変動がある場合には、1次転写部分で、感光体1との間で速度差が生じることから、同様に、画像の伸び縮み、濃淡が生じてしまう。
【0025】
特に、2次転写部の転写ニップに記録媒体の先端が侵入するときの衝撃により中間転写ベルト6に瞬間的な負荷が生じ、中間転写ベルト6に速度変動が生じると、画質が大きく劣化する。
【0026】
以下、2次転写部の転写ニップに記録媒体の先端が侵入するときの衝撃による画質劣化を抑制する方法について説明する。
【0027】
図2は、本実施の形態における中間転写ユニットの駆動制御に関わる構成を示す説明図である。ここでは、中間転写ユニットとは、中間転写ベルト駆動系と、記録媒体搬送系のことを言う。
【0028】
本実施の形態では、駆動ローラ7および従動ローラ9、201、202に掛け渡されている無端状のベルトからなる像担持体である中間転写ベルト6を等速駆動するように、駆動源であるDCモータ203および記録媒体推進力制御手段としての補助モータ209を制御する。
【0029】
なお、図2に示しているように、駆動ローラ7、従動ローラ9、201は同一の径で構成されている。DCモータ203の回転トルク(駆動力)は、2つの歯車204、205からなる歯車減速機構から駆動ローラ7の回転軸206に伝達され、これにより駆動ローラ7が回転駆動して中間転写ベルト6が表面移動する。
【0030】
DCモータ203に対するフィードバック制御(モータ定速制御)は、DCモータ203の出力軸に配置されたモータ角速度検出用エンコーダ207の出力に基づき、駆動制御手段としての制御装置200にて行われる。
【0031】
また、中間転写ベルト6を支持する従動ローラ201の回転軸には、図示しないカップリングを介した従動ローラ角速度検出用エンコーダ208が取り付けられている。
【0032】
記録媒体の搬送のために、レジストローラ対8が設けられており、図示しない駆動系により駆動されている。レジストローラ対8と2次転写ローラ10の間には、記録媒体推進力制御ローラ210およびその対向ローラ211が配置されており、記録媒体推進力制御ローラ210には、図示しない剛性の高いジョイントで、制動手段としての補助モータ209が取り付けられている。
【0033】
この補助モータ209は、記録媒体推進力制御ローラ210に与える駆動力の大きさが制御装置200により制御できるものであり、例えば電流コントローラを用いて駆動電流を制御することにより、記録媒体に対して、加速方向の駆動トルクと減速方向の負荷トルクを付加できるDCモータを利用することができる。
【0034】
なお、補助モータ209としては、中間転写ベルト6に対して駆動力(駆動トルク)を付与するものであって、その駆動力の大きさを制御装置200により多段階で制御できるものであれば、どのようなものであってもよい。
【0035】
さらに配置する位置も、レジストローラ対8と2次転写ローラ10の間である必要はなく、記録媒体が2次転写ローラに当たる際に、記録媒体部に当たる位置であれば、レジストローラ対8の手前(上流側)であっても構わない。
【0036】
図3は、本実施の形態における制御装置200による中間転写ベルト6の駆動制御系を説明するためのハードウェアブロック図である。
【0037】
本実施の形態における中間転写ユニットの駆動制御系は、レジストローラ対8の駆動を含め3つのフィードバック制御系に大別できる。レジストローラ対8の駆動は、特別な制御は不要のため、DCモータもしくは、パルスモータを用いた通常の速度制御である。そこで、ここでの説明は省略する。
【0038】
第2のフィードバック制御系は、モータ角速度検出用エンコーダ207の出力信号に基づいて中間転写ベルト6の駆動源であるDCモータ203の角速度(以下「モータ角速度」という。)をフィードバック制御するモータ定速制御系である。
【0039】
第3のフィードバック制御系は、推定用パラメータであるDCモータ203の駆動電流(駆動入力値)と、推定用パラメータであるモータ角速度と、推定用パラメータである中間転写ベルト6の従動ローラ角速度(以下「従動ローラ角速度」という。)と、後述する解析モデルとから、トルク変動量推定手段としての後述する外乱推定器により、中間転写ベルト6に加わるトルク変動量を推定し、その推定結果に基づいて補助モータ209をトルク制御するトルク制御系である。
【0040】
本実施の形態における中間転写ユニットの駆動制御系は、マイクロコンピュータ21、バス22、モータ駆動用インターフェイス装置24、DCモータ203を駆動させるモータ駆動装置25、検知手段としてのモータ駆動電流検出装置301、検知手段としてのモータ角速度検出用エンコーダ207、検知手段としての従動ローラ角速度検出用エンコーダ208、これらの検出用インターフェイス装置302、303、304、記録媒体推進力制御用補助モータ駆動インターフェイス装置305、補助モータ209を駆動させる補助モータ駆動装置306、補助モータ駆動電流検出装置307、補助モータ駆動電流検出用インターフェイス装置308などから構成されている。
【0041】
マイクロコンピュータ21は、マイクロプロセッサ21a、リードオンリメモリ(ROM)21b、ランダムアクセスメモリ(RAM)21c等で構成されている。これらのマイクロプロセッサ21a、リードオンリメモリ(ROM)21b、ランダムアクセスメモリ(RAM)21c等はそれぞれバス22を介して接続されている。
【0042】
DCモータ203の出力軸に取り付けられたモータ角速度検出用エンコーダ207は、制御装置200のモータ角速度検出用インターフェイス装置303に接続されている。このモータ角速度検出用インターフェイス装置303は、モータ角速度検出用エンコーダ207の出力を処理してデジタル値に変換するものである。
【0043】
詳しくは、モータ角速度検出用エンコーダ207から出力されるパルス数を計数するカウンタを備え、このパルス数に対応するモータ角速度を示すデジタル値を、バス22を介してマイクロコンピュータ21に送る。
【0044】
モータ駆動用インターフェイス装置24は、マイクロコンピュータ21によるDCモータ駆動制御入力演算結果を示すデジタル値に基づいて、モータ駆動装置25を構成するパワー半導体(例えばトランジスタ)を動作させるパルス状の駆動信号(駆動電圧)を生成する。
【0045】
DCモータ203は、パルス状の駆動電圧が印加されることで、これに応じた角速度で駆動する。DCモータ203に流れる駆動電流は、例えば電流プローブ等で構成されるモータ駆動電流検出装置301により検出される。
【0046】
検出された電流値は、A/D変換装置等で構成されているモータ駆動電流検出用インターフェイス装置302を介してマイクロコンピュータ21に取り込まれる。
【0047】
従動ローラ角速度検出用エンコーダ208は、上述したように、中間転写ベルト6を支持する従動ローラ201の回転軸に取り付けられており、制御装置200の従動ローラ角速度検出用インターフェイス装置304に接続されている。
【0048】
この従動ローラ角速度検出用インターフェイス装置304は、上述したモータ角速度検出用インターフェイス装置303と同様の構成であり、従動ローラ角速度検出用エンコーダ208の出力を処理してデジタル値に変換するものである。
【0049】
詳しくは、従動ローラ角速度検出用エンコーダ208から出力されるパルス数を計数するカウンタを備え、このパルス数に対応する従動ローラ201の角速度を示すデジタル値を、バス22を介してマイクロコンピュータ21に送る。
【0050】
補助モータ駆動用インターフェイス装置305は、マイクロコンピュータ21による駆動トルク変動量の推定結果を目標電流値に換算し、この換算結果と、補助モータ駆動電流検出装置307により検出される駆動電流値を用いたマイクロコンピュータ21による補正制御量演算結果(後述)すなわち電流制御系のデジタル値とに基づいて、補助モータ駆動装置306を構成するパワー半導体(例えばトランジスタ)を動作させるパルス状の駆動信号(駆動電圧)を生成する。
【0051】
補助モータ209は、パルス状の駆動電圧が印加されることで、これに応じた角速度で駆動するが、制御されているのはあくまでもトルクである。補助モータ209に流れる駆動電流は、電流プローブ等からなる補助モータ駆動電流検出装置307により検出される。
【0052】
検出された駆動電流値は、検出された電流値は、A/D変換装置等で構成されている補助モータ駆動電流検出用インターフェイス装置308を介してマイクロコンピュータ21に取り込まれる。
【0053】
本実施の形態において、マイクロコンピュータ21は、中間転写ベルト6の駆動制御系の解析モデルとして、駆動伝達系に最大の影響を与えるバネ特性を付与する特定駆動伝達部材としての2つの歯車204、205からなる歯車減速機構を境にDCモータ203の側と中間転写ベルト6の側とをそれぞれ1つの慣性系とし、DCモータ203の側の慣性系を示すモータ部と中間転写ベルト6の側の慣性系を示す転写ユニット部とを、2つの歯車204、205からなる歯車減速機構を含むねじりばね部で連結した2慣性系の解析モデルを用いて、中間転写ベルト6に生じる駆動負荷トルクの変動量をリアルタイムで(厳密には単位サンプリング時間分だけ遅れて)算出する。
【0054】
詳しくは、この解析モデルに基づき、マイクロコンピュータ21は、後述の外乱推定器として機能して、モータ駆動電流検出装置301で検出されるDCモータ203の駆動電流、モータ角速度検出用エンコーダ207で検出されるモータ角速度、従動ローラ角速度検出用エンコーダ208で検出される従動ローラ角速度から、中間転写ベルト6に生じているトルク変動をリアルタイムで推定する。
【0055】
そして、この推定結果を基に、その推定に係るトルク変動プロファイルをキャンセルする補助モータ209の制御量を決定し、その制御量を補助モータ駆動用インターフェイス装置305を介して補助モータ駆動装置306に与える。
【0056】
これにより、補助モータ209がその制御量に従った駆動力(駆動トルク)を記録媒体に加える。その結果、記録媒体が2次転写部の転写ニップに進入する時の衝撃が中間転写ベルト6に加わっても、トルク変動を補正する推進力を記録媒体を介して与えられるので中間転写ベルト6のベルト速度は変動せずに一定速度を保つことができる。
【0057】
この際、記録媒体への補助モータ209による推進力付与と、レジストローラ対8による等速度駆動は同時に行うことが可能なので、両者の駆動を切り替える必要はない。
【0058】
ここで、角速度を検出する方法、すなわち、モータ角速度検出用エンコーダ207の出力を処理するモータ角速度検出用インターフェイス装置303と、従動ローラ角速度検出用エンコーダ208の出力を処理する従動ローラ角速度検出用インターフェイス装置304の処理方法について説明する。
【0059】
これらの検出用インターフェイス装置303、304の機能は互いに同じなので、以下、モータ角速度検出用インターフェイス装置303を例に挙げて説明する。
【0060】
図4は、モータ角速度検出用エンコーダ207からのエンコーダ出力と基準クロックCLKとを示す説明図である。
【0061】
図5は、モータ角速度を検出するためにマイクロプロセッサ21aが実行する割り込みルーチンを示すフローチャートである。
【0062】
モータ角速度検出用インターフェイス装置303は、その出力がマイクロプロセッサ21aの割り込みに接続されており、また、基準クロックCLKをカウントするタイマーを備えている。
【0063】
図4において、エンコーダ出力パルスのエッジE1が到達する直前の状態から説明する。モータ角速度検出用インターフェイス装置303に設けられるカウンタ(例えば16進カウンタ)は、エンコーダ出力パルスを基準クロックCLKをもとに、与えられたカウント値(例えば0FFFFH)からデクリメントカウント処理を実行する。
【0064】
エッジE1がマイクロプロセッサ21aの割り込みへ到達すると、図5に示す割り込みルーチンが実行される。割り込みルーチンが開始されると、カウンタのデクリメントカウント値が、モータ角速度検出用インターフェイス装置303の内蔵レジスタにラッチされる(ステップS1)。
【0065】
次に、ラッチされたデクリメントカウント値を、図3に示したランダムアクセスメモリ21cへ格納する(ステップS2)。そして、Tnのパルス周期をカウントするためのカウント初期値(0FFFFH)を与え、再度デクリメントカウントを開始し(ステップS3)、割り込みの処理を終了する。そして、次のエッジE2を検出したら、再びステップS1〜ステップS3の処理を繰り返す。
【0066】
パルスTnにおける速度V(i)は、次に示す数式1から求められる。
【数1】
【0067】
ここで、「Tclk」は基準クロックCLKの周期であり、「Ne」は単位角度当たりのエンコーダ分割数である。また、「n」、は基準クロックCLKのカウント数であり、本実施の形態では、(0FFFFH)−(デクリメントカウント数)に相当する。「k」は、速度への単位換算定数である。
【0068】
図6は、本実施の形態における中間転写ユニットの駆動制御系において、記録媒体の2次転写部突入時の中間転写ベルト6に加わるトルク変動を外乱として同定するための2慣性系の解析モデルおよび、その結果をもとに、記録媒体へ補助推進力を与えることを説明するための説明図である。
【0069】
上述したとおり、本実施の形態における中間転写ベルト6の駆動制御系は、モータ部と転写ユニット部とからなる2つの慣性系の間の軸部にジョイント部を想定した2慣性系モデルとして考えることができる。
【0070】
特に、本実施の形態において転写ユニット部を1つの慣性系として考えられる理由は、中間転写ベルト6の剛性が高く(弾性が低く)、かつ、中間転写ベルト6に加えるテンションが強いことから、中間転写ベルト6の表面移動とこれを支持する各支持ローラ7、9、201、202の回転はすべりのない剛体と考えてよいためである。
【0071】
また、ジョイント部の軸回りのねじりばね特性および粘性特性を1次共振要素として考慮する。また、中間転写ベルト6の駆動ローラ7の回転軸回りの粘性係数およびDCモータ203の出力軸回りの粘性係数をそれぞれの慣性系での減衰特性として考慮する。
【0072】
そして、このジョイント部は、実際に物理的に存在しない仮想的な一体軸のようなものを想定し、慣性のない、つまり、慣性モーメントを有さないものとして取り扱う。
【0073】
次に、図7に示す解析モデルにおける各パラメータを決定する方法の一例について説明する。
【0074】
まず、中間転写ベルト6の駆動制御系を設計するにあたって、図2で示すような中間転写ベルト6の駆動機構の試作機を作成し、実験において、その駆動制御系がフィードバック制御する対象となる入力をDCモータ203に入力される駆動電流とし、出力を中間転写ベルト6の駆動ローラ7の角速度までとする制御要素の周波数応答を測定する。
【0075】
次に、この入出力モデルの伝達関数を特定する。図6に示す解析モデルのパラメータのうち、モータ部の粘性係数Dm、モータ部の定常負荷Xm、転写ユニット部の粘性係数Dr、転写ユニット部の定常負荷Xr以外は、設計値から容易に算出可能である。
【0076】
したがって、前記4つのパラメータの算出方法の一例についてのみ以下説明する。
【0077】
モータ部の粘性係数Dmおよびモータ部の定常負荷Xmを算出する場合、まず、試作機などにおいて、モータ部単体で以下の実験を行う。
【0078】
一定電流でモータを駆動させた際のDCモータ203の駆動電流とモータ角速度を電流計およびタコジェネレータ等で実際に計測し、DCモータ203の駆動電流およびモータ角速度の時系列データを得る。
【0079】
モータ角速度の時系列データから、モータ部の機械的時定数を用いてモータ部の粘性係数Dmを算出し、回転運動の運動方程式よりモータ部の定常負荷Xmを算出する。
【0080】
つまり、モータ部に関しては、ギヤの慣性をもモータ軸に含めて考えて1つの慣性系(慣性モーメントは1つ)とみなし、モータ部の粘性係数Dmを1次遅れ要素と考えると、入力を駆動電流、出力をモータ角速度としたときの伝達関数Gm(s)および時定数Taは、それぞれ、下記の数式2および数式3に示すとおりである。
【0081】
ただし、下記の式において、「K」は1次遅れ系の比例定数であり、「s」はラプラス演算子であり、「Jm」はモータ部の慣性モーメントである。
【数2】
【数3】
【0082】
DCモータ203の回転を開始して時間Taを経過した時のモータ角速度は、その定常値(モータ回転開始から時間が十分に経った時のモータ角速度)の約63.2%に達することから逆算して、上述したモータ角速度の時系列データよりモータ部の機械的時定数Taを求め、既知のモータ部の慣性モーメントJmを代入して、モータ部の粘性係数Dmを算出する。
【0083】
そして、モータ部に関する回転運動の運動方程式より、モータ角速度の時系列データの最終値部分(定常値)のモータ角速度ωmを用いて慣性項を除くと、下記の数式4が得られ、この式からモータ部の粘性係数Dmを求めることができる。
【0084】
ただし、下記の数式4において、「Ke」はDCモータ203のトルク定数であり、「j」はDCモータの駆動電流である。
【数4】
【0085】
次に、転写ユニット部の粘性係数Drおよび転写ユニット部の定常負荷Xrを算出する場合は、例えば図3に示したような中間転写ユニット全体を用い、以下の実験を行う。
【0086】
転写ユニット部の粘性係数Drおよび転写ユニット部の定常負荷Xrを算出する場合、一定電流でモータを駆動させた際のDCモータ203の駆動電流とモータ角速度並びに駆動ローラ7の角速度を、それぞれ電流計、タコジェネレータ、エンコーダ等で実際に計測し、駆動ローラ7の角速度の時系列データを得る。
【0087】
そして、モータ部の場合と同様、機械的時定数を用いて転写ユニット部の粘性係数Drを算出し、回転運動の運動方程式より転写ユニット部の定常負荷Xrを算出する。
【0088】
つまり、モータ部と転写ユニット部で2慣性系とみなし、モータ部の粘性係数Dmおよび転写ユニット部の粘性係数Drを各慣性系での1次遅れ要素と考えると、入力をDCモータの駆動電流、出力を駆動ローラ7の角速度としたときの伝達関数Gr(s)および時定数(モータ部+転写ユニット部の機械的時定数)Tbは、それぞれ、下記の数式5および数式6に示すとおりである。
【0089】
ただし、下記の式において、「Jr」は転写ユニット部の慣性モーメントであり、nは減速比である。
【数5】
【数6】
【0090】
上述したモータ部の時定数Taの場合と同様に、駆動ローラ7の角速度の時系列データより時定数Tbを求め、既知の慣性モーメントJm、Jrと既に算出済みのモータ部の粘性係数Dmを用いて、転写ユニット部の粘性係数Drを算出する。
【0091】
そして、モータ部の場合と同様、転写ユニット部に関する回転運動の運動方程式より、駆動ローラ7の角速度の時系列データの最終値部分(定常値)の駆動ローラ7の角速度ωrを用いて慣性項を除くと、下記の数式7が得られ、この式から転写ユニット部の定常負荷Xrを求めることができる。
【数7】
【0092】
実験においてDCモータ203に入力される駆動電流から駆動ローラ7の角速度もしくは角変位までの伝達関数を求める。DCモータ203が決定されれば、モータ部のトルク定数Keが求まるので、DCモータ203のトルク定数KeをDCモータ203に入力した駆動電流値に乗じることにより、DCモータ203のトルクから駆動ローラ7の角速度もしくは角変位までの伝達関数が簡単に求められる。
【0093】
次に、図6に示す解析モデルにおけるジョイント部のねじりばね定数の算出について説明する。
【0094】
ジョイント部のねじりばね定数Ksは、ジョイント部の粘性係数Dsを無視した状態で求める。2慣性系の場合、ジョイント部の粘性係数Dsを無視すれば、1次共振周波数Fは、次の数式8で求められる。
【数8】
【0095】
この数式8の左辺をジョイント部のねじりばね定数Ksに変換すると、次の数式9が得られる。
【数9】
【0096】
したがって、実験により1次共振周波数Fを求め、この数式9に既知のモータ部の慣性モーメントJmおよび転写ユニット部の慣性モーメントJrを代入することで、ジョイント部のねじりばね定数Ksを算出することができる。
【0097】
なお、1次共振周波数Fは、周波数応答実測結果のゲイン線図のピーク値のうち最も低い周波数として求められる。
【0098】
このようにして、ねじりばね定数Ksが得られたら、次に、実測した1次共振の減衰特性と解析モデルによる1次共振の減衰特性とが略一致するように、ジョイント部の粘性係数Dsを決定する。1次共振の減衰特性とジョイント部の粘性係数Dsは1対1に対応している。
【0099】
よって、ジョイント部の粘性係数Dsを変えることで、1次共振の減衰特性も変わるため、ジョイント部の粘性係数Dsの値を変えてシミュレーションを行い、1次共振周波数付近の周波数について周波数応答実測結果と比較することで、ジョイント部の粘性係数Dsを決定することができる。
【0100】
また、図6に示す解析モデルのモータ制御部について説明する。
【0101】
図6において、モータ角速度検出用エンコーダ207の出力パルス信号を処理するモータ角速度検出用インターフェイス装置303から出力されるモータ角速度ωm(i−1)は、演算部(減算器)601に与えられる。
【0102】
この演算部601は、制御目標値(以下「目標モータ角速度」という。)ReF(i)と、DCモータ203のモータ角速度ωm(i−1)との差e(i)を算出する。この差e(i)は、制御コントローラ部602に入力される。
【0103】
制御コントローラ部602は、例えばP制御系で構成される。演算部601で算出されたe(i)は、比例定数Kpが乗じられてDCモータ203の駆動電圧u(i)が決定される。
【0104】
更に、この駆動電圧u(i)に基づいてモータ駆動用インターフェイス装置24およびモータ駆動装置25によりパルス状の駆動信号が生成され、この駆動信号によりDCモータ203が駆動される。
【0105】
なお、ここでは、制御コントローラ部602の一例としてP制御系を用いているが、これに限定されるものではない。また、上記演算のすべては、マイクロコンピュータ21内の数値演算で行われ、簡単に実現することができる。
【0106】
次に、図6に示す解析モデルの記録媒体推進力付加制御量設定部600について説明する。
【0107】
本実施の形態において、DCモータ203の駆動電流Im(i−1)、モータ角速度ωm(i−1)、および、中間転写ベルト6の従動ローラ角速度ωr(i−1)は、これらのパラメータから中間転写ベルト6を意味する中間転写ユニットを一つの慣性とみなした慣性体に生じるトルク変動である外乱τrを推定し、その推定値から外乱τrをキャンセルするための補助モータ209の記録媒体推進力(トルク)付加制御量を設定するための記録媒体推進力付加制御量設定部600に与えられる。
【0108】
この記録媒体推進力付加制御量設定部600の出力Pb(i−1)は、図3に示す補助モータ駆動用インターフェイス装置305を介して補助モータ駆動装置306に入力される。ここでいう外乱τrが、記録媒体の2次転写ニップ進入時に生じる中間転写ベルト6のトルク変動に相当する。
【0109】
補助モータ209により、記録媒体に加えられた推進力は、記録媒体を介して、中間転写ベルト6に加えられることになる。したがって、この外乱τrと補助モータ駆動装置306に入力される記録媒体推進力付加制御量設定部600の出力Pb(i−1)により与えられる推進力が一致していれば、補助モータ209が付与する記録媒体への付加推進力により、転写ユニット部内で外乱τrが相殺され、この外乱τrが他の部分に影響を与えることはない。
【0110】
すなわち、本解析モデルにおいて外乱τrは無視できるものとなり、記録媒体の2次転写ニップ進入時に生じる中間転写ベルト6のトルク変動が生じないことになる。これについては、図8を参照して詳細を説明する。
【0111】
図7は、記録媒体推進力付加制御量設定部600の制御ブロック図である。
【0112】
この記録媒体推進力付加制御量設定部600は、図6に示した2慣性系の解析モデルを基にした外乱推定器701と、調整部702とから構成されている。図7において、「T」は、外乱推定器701を安定動作させるためのローパスフィルタの時定数であり、外乱推定器701は、2慣性モデルの逆システムに適当なローパスフィルタを加えた形で構成している。
【0113】
次に、調整部702について説明する。C1(ブロック703)は調整係数であり、中間転写の従動ローラ201にかかる外乱トルクτr'を記録媒体推進力制御ローラ210のトルクに換算するためのものである。
【0114】
具体的には、図8を参照して、外乱トルクを図8ではTr1、従動ローラ201の半径をr1、記録媒体の推進力をF、記録媒体推進力制御ローラ210の半径をr2、記録媒体推進力制御ローラ210に加えるトルクをTr2とすると、それらの関係は、幾何学的に図8に示したようになる。そこで、調整係数は、r2/r1となる。
【0115】
ブロック703の出力は、ブロック706に入力される。このブロック706は補助モータ209のトルク定数の逆数を与えるものであり、これにより外乱推定器701の出力τr'に補正係数をかけた結果を駆動電流値に変換する。
【0116】
ブロック706の出力は、ブロック707に入力される。補助モータ209により付与する駆動力の制御は、推定した駆動負荷トルク変動量のプロファイルとは正負反対で行うため、このブロックは−1の値を持つ。このブロック707の出力が補助モータ用の電流制御系708の目標電流になる。
【0117】
補助モータ209用の電流制御系708に含まれるブロック709は、補助モータ209のインピーダンス部分である。ブロック710は、補助モータ209用の電流制御系のフィードバックゲインである。
【0118】
ここでは、この系を安定させるために、フィードバックゲインの分子にモータインピーダンスの逆数を与え、ブロック710とブロック709とで、1次のローパスフィルタを構成する値に設定している。
【0119】
ブロック709の出力が補助モータ209の駆動電流であり、補助モータ駆動電流検出装置307および補助モータ駆動電流検出用インターフェイス装置308で計測され、フィードバックに用いられる。
【0120】
なお、記録媒体推進力付加制御量設定部600における演算処理は、すべて、上述した制御コントローラ部602と同様に、マイクロコンピュータ21内の数値演算で行われ、簡単に実現することができる。
【0121】
本実施の形態は、中間転写ベルト6の速度を従動ローラ201の角速度として計測したが、これ以外にも、中間転写ベルト6の速度を直接計測しても同様であり、また、中間転写ベルト6だけでなく、中間転写ドラムを用いた画像形成装置に適用しても、全く同様の効果が得られることは明らかである。
【0122】
なお、上記本発明における駆動制御はコンピュータを用いて実行することができる。図9は、上記本発明の駆動制御の実行に使用可能なコンピュータの一例であるパーソナルコンピュータ511の正面図である。
【0123】
パーソナルコンピュータ511に着脱可能なプログラム記録媒体512には、パーソナルコンピュータ511に制御のための演算、データ入出力等を実行させるためのプログラムが格納されている。
【0124】
パーソナルコンピュータ511は、このプログラム記録媒体512に格納されているプログラムを実行することにより、上記各実施の形態における駆動制御を実行することができる。
【0125】
プログラム記録媒体512としては、CD−ROM等の光ディスクやフレキシブルディスク等の磁気ディスクが挙げられる。また、上記プログラムは、記録媒体を用いずに通信ネットワークを介してパーソナルコンピュータ511に取り込むようにしてもよい。
【0126】
また、上記実施の形態で示したように上記駆動制御に用いるコンピュータとしてはマイクロコンピュータを用いることができる。このマイクロコンピュータは、上記転写装置や画像形成装置などに組み込んで用いられる。この場合の制御プログラムを格納する記録媒体としては、マイクロコンピュータ内のROMを用いることができる。
【0127】
以上のように、本実施の形態に係る画像形成装置100は、トナー画像を担持する中間転写ベルト6と、中間転写ベルト6が担持するトナー画像を記録媒体に圧接して転写する2次転写ローラ10と、記録媒体を2次転写ローラ10に搬送するレジストローラ対8と、レジストローラ対8によって搬送される記録媒体の推進力を補助するとともに、中間転写ベルト6にかかる外乱トルクを補正する力を発生する記録媒体推進力制御ローラ210と、を備えたことを特徴とする。
【0128】
この構成により、記録媒体が2次転写ローラ10の圧接部に突入する際に発生する中間転写ベルト6の回転負荷を抑制して中間転写ベルト6の速度変動を抑え、画像劣化を防止することができる。
【0129】
また、本実施の形態に係る画像形成装置100は、補正すべき中間転写ベルト6にかかる外乱トルクを推定するトルク変動推定手段を備え、このトルク変動推定手段は、中間転写ベルト6を駆動するDCモータ203の駆動電流と、DCモータ203の駆動角速度と、中間転写ベルト6の表面移動の位置、速度または角速度とを、推定用パラメータとして検知するモータ角速度検出用エンコーダ207、従動ローラ角速度検出用エンコーダ208、モータ駆動電流検出装置301、補助モータ駆動電流検出装置307と、DCモータ203から中間転写ベルト6への駆動伝達経路上に設けられる複数の駆動伝達部材の中で、駆動伝達経路の駆動伝達系に最も弱いバネ特性を付与する歯車204、205を境にDCモータ203側と中間転写ベルト6側とをそれぞれ駆動モータ側慣性系と中間転写ベルト側慣性系とし、かつ、駆動モータ側慣性系と中間転写ベルト側慣性系とを歯車204、205を含むねじりばね部で連結した2慣性系の解析モデルを用いて、中間転写ベルト6の負荷トルクの変動量を推定するマイクロコンピュータ21と、を有することを特徴とする。
【0130】
また、本実施の形態に係る画像形成装置100は、記録媒体推進力制御ローラ210が、2次転写ローラ10とレジストローラ対8との間で、記録媒体の推進力を補助することを特徴とする。
【符号の説明】
【0131】
1 感光体
6 中間転写ベルト(像担持体)
7 駆動ローラ
8 レジストローラ対(記録媒体搬送手段)
9 2次転写対向ローラ(転写手段)
10 2次転写ローラ(転写手段)
21 マイクロコンピュータ(外乱推定器)
24 モータ駆動用インターフェイス装置
25 モータ駆動装置
200 制御装置
201 従動ローラ
203 DCモータ(駆動モータ)
204、205 歯車(特定駆動伝達部材)
207 モータ角速度検出用エンコーダ(検知手段)
208 従動ローラ角速度検出用エンコーダ(検知手段)
209 補助モータ
210 記録媒体推進力制御ローラ(記録媒体推進力補助手段)
211 対向ローラ
301 モータ駆動電流検出装置(検知手段)
302 モータ駆動電流検出用インターフェイス装置
303 モータ角速度検出用インターフェイス装置
304 従動ローラ角速度検出用インターフェイス装置
305 補助モータ駆動用インターフェイス装置
306 補助モータ駆動装置
307 補助モータ駆動電流検出装置(検知手段)
308 補助モータ駆動電流検出用インターフェイス装置
511 パーソナルコンピュータ
512 プログラム記録媒体
600 記録媒体推進力付加制御量設定部
601 演算部
602 制御コントローラ部
701 外乱推定器
702 調整部
【先行技術文献】
【特許文献】
【0132】
【特許文献1】特許第4723984号公報
【特許文献2】特開2008−096640号公報
【特許請求の範囲】
【請求項1】
トナー画像を担持する像担持体と、
前記像担持体が担持するトナー画像を記録媒体に圧接して転写する転写手段と、
前記記録媒体を前記転写手段に搬送する記録媒体搬送手段と、
前記記録媒体搬送手段によって搬送される記録媒体の推進力を補助するとともに、前記像担持体にかかる外乱トルクを補正する力を発生する記録媒体推進力補助手段と、を備えたことを特徴とする画像形成装置。
【請求項2】
前記記録媒体推進力補助手段は、補正すべき前記像担持体にかかる外乱トルクを推定するトルク変動推定手段を備え、
前記トルク変動推定手段は、
前記像担持体を駆動する駆動モータの駆動電流と、前記駆動モータの駆動角速度と、前記像担持体の表面移動の位置、速度または角速度とを、推定用パラメータとして検知する検知手段と、
前記駆動モータから前記像担持体への駆動伝達経路上に設けられる複数の駆動伝達部材の中で、前記駆動伝達経路の駆動伝達系に最も弱いばね特性を付与する特定駆動伝達部材を境に前記駆動モータ側と前記像担持体側とをそれぞれ駆動モータ側慣性系と像担持体側慣性系とし、かつ、前記駆動モータ側慣性系と前記像担持体側慣性系とを前記特定駆動伝達部材を含むねじりばね部で連結した2慣性系の解析モデルを用いて、前記像担持体の負荷トルクの変動量を推定する外乱推定器と、を有することを特徴とする請求項1に記載の画像形成装置。
【請求項3】
前記記録媒体推進力補助手段は、前記転写手段と前記記録媒体搬送手段との間で、記録媒体の推進力を補助することを特徴とする請求項1または請求項2に記載の画像形成装置。
【請求項4】
トナー画像を担持する像担持体と、
前記像担持体が担持するトナー画像を記録媒体に圧接して転写する転写手段と、
前記記録媒体を前記転写手段に搬送する記録媒体搬送手段と、
前記記録媒体搬送手段によって搬送される記録媒体の推進力を補助するとともに、前記像担持体にかかる外乱トルクを補正する力を発生する記録媒体推進力補助手段と、を備えた画像形成装置の記録媒体推進力補助方法であって、
前記像担持体の負荷トルクの変動量を推定するための推定用パラメータを検知する検知ステップと、
前記検知した推定用パラメータを所定のサンプリング間隔で連続的にサンプリングするサンプリングステップと、
前記サンプリングした推定用パラメータに基づいて前記負荷トルクの変動量を推定する推定ステップと、
前記推定した負荷トルクの変動量を打ち消すように、前記記録媒体に推進力を付与する付与ステップと、を有することを特徴とする記録媒体推進力補助方法。
【請求項5】
トナー画像を担持する像担持体と、
前記像担持体が担持するトナー画像を記録媒体に圧接して転写する転写手段と、
前記記録媒体を前記転写手段に搬送する記録媒体搬送手段と、
前記記録媒体搬送手段によって搬送される記録媒体の推進力を補助するとともに、前記像担持体にかかる外乱トルクを補正する力を発生する記録媒体推進力補助手段と、を備えた画像形成装置の前記記録媒体推進力補助手段をコンピュータで機能させるプログラムであって、
前記像担持体の負荷トルクの変動量を推定するための推定用パラメータを検知する検知ステップと、
前記検知した推定用パラメータを所定のサンプリング間隔で連続的にサンプリングするサンプリングステップと、
前記サンプリングした推定用パラメータに基づいて前記負荷トルクの変動量を推定する推定ステップと、
前記推定した負荷トルクの変動量を打ち消すように、前記記録媒体に推進力を付与する付与ステップと、を前記コンピュータに実行させることを特徴とするプログラム。
【請求項6】
請求項5に記載のプログラムを格納したことを特徴とするプログラム記録媒体。
【請求項1】
トナー画像を担持する像担持体と、
前記像担持体が担持するトナー画像を記録媒体に圧接して転写する転写手段と、
前記記録媒体を前記転写手段に搬送する記録媒体搬送手段と、
前記記録媒体搬送手段によって搬送される記録媒体の推進力を補助するとともに、前記像担持体にかかる外乱トルクを補正する力を発生する記録媒体推進力補助手段と、を備えたことを特徴とする画像形成装置。
【請求項2】
前記記録媒体推進力補助手段は、補正すべき前記像担持体にかかる外乱トルクを推定するトルク変動推定手段を備え、
前記トルク変動推定手段は、
前記像担持体を駆動する駆動モータの駆動電流と、前記駆動モータの駆動角速度と、前記像担持体の表面移動の位置、速度または角速度とを、推定用パラメータとして検知する検知手段と、
前記駆動モータから前記像担持体への駆動伝達経路上に設けられる複数の駆動伝達部材の中で、前記駆動伝達経路の駆動伝達系に最も弱いばね特性を付与する特定駆動伝達部材を境に前記駆動モータ側と前記像担持体側とをそれぞれ駆動モータ側慣性系と像担持体側慣性系とし、かつ、前記駆動モータ側慣性系と前記像担持体側慣性系とを前記特定駆動伝達部材を含むねじりばね部で連結した2慣性系の解析モデルを用いて、前記像担持体の負荷トルクの変動量を推定する外乱推定器と、を有することを特徴とする請求項1に記載の画像形成装置。
【請求項3】
前記記録媒体推進力補助手段は、前記転写手段と前記記録媒体搬送手段との間で、記録媒体の推進力を補助することを特徴とする請求項1または請求項2に記載の画像形成装置。
【請求項4】
トナー画像を担持する像担持体と、
前記像担持体が担持するトナー画像を記録媒体に圧接して転写する転写手段と、
前記記録媒体を前記転写手段に搬送する記録媒体搬送手段と、
前記記録媒体搬送手段によって搬送される記録媒体の推進力を補助するとともに、前記像担持体にかかる外乱トルクを補正する力を発生する記録媒体推進力補助手段と、を備えた画像形成装置の記録媒体推進力補助方法であって、
前記像担持体の負荷トルクの変動量を推定するための推定用パラメータを検知する検知ステップと、
前記検知した推定用パラメータを所定のサンプリング間隔で連続的にサンプリングするサンプリングステップと、
前記サンプリングした推定用パラメータに基づいて前記負荷トルクの変動量を推定する推定ステップと、
前記推定した負荷トルクの変動量を打ち消すように、前記記録媒体に推進力を付与する付与ステップと、を有することを特徴とする記録媒体推進力補助方法。
【請求項5】
トナー画像を担持する像担持体と、
前記像担持体が担持するトナー画像を記録媒体に圧接して転写する転写手段と、
前記記録媒体を前記転写手段に搬送する記録媒体搬送手段と、
前記記録媒体搬送手段によって搬送される記録媒体の推進力を補助するとともに、前記像担持体にかかる外乱トルクを補正する力を発生する記録媒体推進力補助手段と、を備えた画像形成装置の前記記録媒体推進力補助手段をコンピュータで機能させるプログラムであって、
前記像担持体の負荷トルクの変動量を推定するための推定用パラメータを検知する検知ステップと、
前記検知した推定用パラメータを所定のサンプリング間隔で連続的にサンプリングするサンプリングステップと、
前記サンプリングした推定用パラメータに基づいて前記負荷トルクの変動量を推定する推定ステップと、
前記推定した負荷トルクの変動量を打ち消すように、前記記録媒体に推進力を付与する付与ステップと、を前記コンピュータに実行させることを特徴とするプログラム。
【請求項6】
請求項5に記載のプログラムを格納したことを特徴とするプログラム記録媒体。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【公開番号】特開2013−109033(P2013−109033A)
【公開日】平成25年6月6日(2013.6.6)
【国際特許分類】
【出願番号】特願2011−251795(P2011−251795)
【出願日】平成23年11月17日(2011.11.17)
【出願人】(000006747)株式会社リコー (37,907)
【Fターム(参考)】
【公開日】平成25年6月6日(2013.6.6)
【国際特許分類】
【出願日】平成23年11月17日(2011.11.17)
【出願人】(000006747)株式会社リコー (37,907)
【Fターム(参考)】
[ Back to top ]