
画像形成装置
【課題】 ヒートロールの温度を複数箇所において検知し、ヒートロールの温度を制御する画像形成装置を提供する。
【解決手段】 ヒートロール51にワイヤレスセンサ110、120、130および140を設け、発信機111からそれぞれのワイヤレスセンサに電波を発信する。発信機111から送信される電波は、アンテナ4Aで電気信号に変えて受信され、アンテナ4Aで受信された電気信号は櫛形電極3Aで誘電体薄膜2表面の弾性表面波に変換される。この弾性表面波は誘電体薄膜2に加わった物理量(温度)の変化によって、振幅、位相差、周波数等が変化する。この弾性表面波の変化を電気信号として受信機112で受信し、電気信号における変化を解析する。そして解析した情報を元にヒートロール51の温度を制御部70が制御する。
【解決手段】 ヒートロール51にワイヤレスセンサ110、120、130および140を設け、発信機111からそれぞれのワイヤレスセンサに電波を発信する。発信機111から送信される電波は、アンテナ4Aで電気信号に変えて受信され、アンテナ4Aで受信された電気信号は櫛形電極3Aで誘電体薄膜2表面の弾性表面波に変換される。この弾性表面波は誘電体薄膜2に加わった物理量(温度)の変化によって、振幅、位相差、周波数等が変化する。この弾性表面波の変化を電気信号として受信機112で受信し、電気信号における変化を解析する。そして解析した情報を元にヒートロール51の温度を制御部70が制御する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、画像形成装置等に用いるトナー像を転写材に定着させるヒートロールの表面温度を検知し、ヒートロールの表面温度を制御する画像形成装置に関する。
【背景技術】
【0002】
従来から、電子写真プロセスを用いた複写機、レーザプリンタ等の画像形成装置においては、記録用紙上に転写した未定着のトナー像を定着するために、例えば、内部にヒータを備えた定着ローラ(ヒートロール)が利用されている。具体的には、転写工程を通過した記録用紙を、ヒートロールと、ヒートロールに対向して設けられている加圧ローラによって上下から圧接し、ヒートロールが記録用紙を加熱することにより、未定着トナー像のトナーを記録用紙に癒着させ、定着させる。このときトナー像を記録用紙に定着させるためにはヒートロールの表面温度を一定の高温に保つ温度制御を行う必要があり、そのために、ヒートロールの表面温度を検知する検知装置が必要になる。
【0003】
そこで、特許文献1には、サーミスタ素子を用いた温度センサによってヒートロールの表面温度を検知する技術が開示されている。温度センサは赤外線吸収性ガラスで溶封されていて、ヒートロールに対して非接触になるように固定されている。そして、温度センサが感知した温度はケーブルを介して画像形成装置本体の温度測定回路に伝えられる。
【特許文献1】特開2004−205417号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
しかしながら、従来の技術では温度センサはケーブルにつながれているため、センサの自由な配置が難しいという問題があった。また、例えば小サイズの記録用紙(記録用紙のサイズがヒートロールの軸方向の長さに対して小さい場合)が連続してヒートロール上を通過する際、紙が通過しない領域のヒートロールの温度が上昇するということが起こる。そのため、ヒートロールの周方向で複数箇所の温度を検知し、制御する必要があるが、特許文献1の技術でこれを行おうとすれば、温度センサの数に応じたケーブルが必要となる。そのため、設けた複数のケーブルを収納するスペースを確保しなくてはならず、設計の自由度が制限されると共に、コストアップの要因となっていた。
【0005】
本発明はこのような事情に鑑みてなされたものであり、その目的は、ケーブル配設の問題を無くし、ヒートロールの温度を複数箇所において検知し、ヒートロールの温度を制御する画像形成装置を提供することにある。
【課題を解決するための手段】
【0006】
上記課題を解決するために、本発明は、記録用紙にトナー像を形成し、前記記録用紙に前記トナー像を定着させるために前記記録用紙を加熱するヒートロールを有する画像形成装置であって、前記ヒートロールの内部に設けられた発熱源と、前記ヒートロールの表面付近に設けられ、前記ヒートロールの表面付近の温度を電波信号に変えて送信するワイヤレスの温度測定手段と、前記温度測定手段から出力される電波を受信し、この受信した電波信号に基づいて前記ヒートロールの温度を算出する受信手段と、前記受信手段で算出された温度に基づき、前記発熱源の温度を制御する制御手段とを備える画像形成装置を提供する。
【0007】
この画像形成装置によれば、発熱源によって内側から加熱するように構成されたヒートロールにワイヤレス温度測定手段を設け、ヒートロールの温度を検知する。このワイヤレスの温度測定手段は、温度を電波に変えて出力する。そして、出力された電波を受信手段が受信し、ヒートロールの温度を算出する。算出した温度を元に、制御手段がヒートロールの温度を制御する。温度測定手段と、受信手段の間で送受信される情報は電波であるため、ケーブルを設置することなくヒートロールの温度を検知し、制御することができる。
【0008】
本発明の好ましい態様においては、前記温度測定手段は、電波信号が供給されると、それをエネルギー源として前記ヒートロールの表面付近の温度を反映した属性と識別情報とを持った電波信号を生成して出力するものが好ましい。このような構成の温度測定手段としては、例えば、INFRATAB.inc社のINFRATAB Fresh Alert(商標登録)など、公知のRFID(Radio Frequency Identification)等を備えたパッシブ型ワイヤレスセンサなどがある。また、電波を受信して機械振動を発生させる励振部と、前記励振部が発生した機械振動が伝達されて弾性表面波を発生するとともに、前記弾性表面波の属性が温度によって変化する振動媒体部と、前記弾性表面波を電気信号に変換して電波信号として出力する送信部とを備えるようにすることが、さらに好ましい。
【発明を実施するための最良の形態】
【0009】
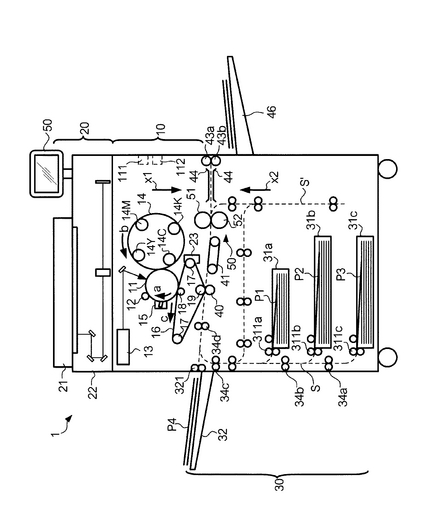
図1は、実施形態に係る画像形成装置1の全体構成を示した図である。この画像形成装置1は、例えばカラープリンタやカラー複写機、或いはこれらの複数の機能を兼ね備えた複合機等である。図1に示すように、画像形成装置1の構成は、画像形成ユニット10と、画像読取ユニット20と、用紙供給ユニット30とに大別される。さらに、画像形成装置1は、ユーザが各種の操作を行うためのユーザインタフェース装置50を備えている。このユーザインタフェース装置50は、タッチパネルとして機能する液晶ディスプレイを備えており、ユーザはこの液晶ディスプレイに触れることで各種操作を行うことができる。
【0010】
用紙供給ユニット30は、用紙トレイ31a,31b,31c及び手差しトレイ32といった用紙供給源と、この用紙供給源から図中の点線Sによって示される搬送路を経由して画像形成ユニット10へ用紙を搬送するための搬送ロール34a〜34cやレジストロール34dとを備えている。より具体的には、用紙トレイ31a,31b,31cにそれぞれ収容された用紙P1,P2,P3は、各用紙トレイ31a,31b,31cに設けられた給紙ロール311a,311b,311cによって1枚ずつ搬送路Sに送り出され、さらに、搬送ロール34a〜34cやレジストロール34dによって画像形成ユニット10へと搬送される。また、手差しトレイ32の上面には用紙P4が複数枚載置されるようになっている。これらの用紙P4は給紙ロール321によって1枚ずつ搬送路Sに送り出され、さらに、搬送ロール34a〜34cやレジストロール34dによって画像形成ユニット10へと搬送されるようになっている。なお、搬送路Sには、用紙の両面に画像を形成するための反転搬送路S’が含まれている。
【0011】
画像読取ユニット20は、原稿送り装置21と、CCD(Charge Coupled Device)等により構成される光学系部材22とを備えている。画像読取ユニット20は、原稿送り装置21によって図示せぬプラテンガラスに順番に載置される原稿の画像を光学系部材22によって読み取り、読み取った画像を表す画像データを生成する。また、画像形成装置1は図示しない通信インタフェースを介してLAN(Local Area Network)等のネットワークに接続されており、パーソナルコンピュータやサーバマシンなどのホスト装置からLANを経由して送信されてくる画像データを受信する。画像形成ユニット10は、画像読取ユニット20によって生成された画像データや、通信インタフェースを介して受信した画像データに基づいて画像形成処理を行う。これらの画像データは、ユーザが所望する任意の画像を表すためのデータである。
【0012】
次に、画像形成ユニット10は、感光体ドラム11と、帯電装置12と、露光装置13とを備えている。感光体ドラム11の外周面(ドラム表面)には感光層が形成されており、この感光体ドラム11は図示せぬ駆動機構によって図中矢印a方向に回転させられる。帯電装置12は、例えばロール型帯電装置やコロトロン型帯電装置であり、感光体ドラム11の表面を所定の電位に一様に帯電させる。露光装置13は、一様に帯電した感光体ドラム11に対し、画像データに応じて変調されたレーザ光を照射し、感光体ドラム11の表面に静電潜像を形成する。
【0013】
また、画像形成ユニット10はロータリー現像装置14(タンデム型も含む)と、クリーニング装置15と、中間転写ベルト16とを備えている。ロータリー現像装置14は、それぞれY(イエロー)、M(マゼンタ)、C(シアン)、K(ブラック)の各色のトナー(現像剤)をそれぞれ収容する現像器14Y,14M,14C,14Kを備えている。このロータリー現像装置14が図示せぬ駆動機構によって図中矢印b方向に回転させられることにより、これら4つの現像器14Y,14M,14C,14Kは順番に感光体ドラム11と近接した位置に移動させられる。そして、各現像器14Y,14M,14C,14Kに収容された各トナーが、それぞれの色に対応する静電潜像に電気的に転移させられることによって、感光体ドラム11の表面にトナー像が形成される。感光体ドラム11近傍に設けられたクリーニングブレード15は、一次転写後の感光体ドラム11表面に残ったトナーを除去する。
【0014】
中間転写ベルト16は、無端のベルト部材であり、その内周面を複数の支持ロール17(図1では2つ)と一次転写ロール18と二次転写ロール19とによって張架された状態で、矢印c方向に周回移動させられる。一次転写ロール18は、感光体ドラム11との間で中間転写ベルト16を挟持しつつ、感光体ドラム11表面に形成されたトナー像を中間転写ベルト16の外周面に転写(一次転写)する。二次転写ロール19は、対向ロール40との間に形成されるニップ領域において、中間転写ベルト16の外周面に転写されているトナー像を用紙へ転写(二次転写)する。また、画像形成ユニット10はベルトクリーナ23を保持しており、二次転写後の中間転写ベルト16の表面に残留しているトナーを除去する。
【0015】
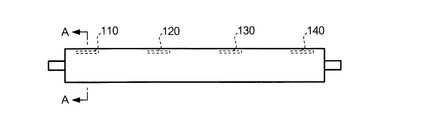
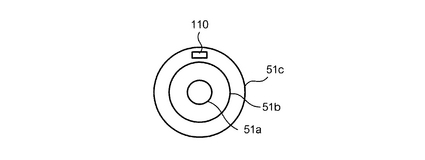
定着装置50は、搬送路Sを挟んで互いに対向するヒートロール51、及び加圧ロール52を備えている。ヒートロール51を上から見た図を図2に示す。図2に示すように、ヒートロール51には点線で示したワイヤレスセンサ110、120、130および140が埋め込まれている。これらのワイヤレスセンサとの電波の送受信を図1の点線で示した送信機111および受信機112が行う。ヒートロール51のA―A’断面図を図3に示す。ヒートロール51は熱源部51a、中間部51b、表面部51cから形成され、熱源部51aはアルミニウム等の金属製コアで形成されている。また、熱源部51aの内部には例えばハロゲンランプ等で構成された発熱体が設けられており、ヒートロール51の表面を内部から加熱する。熱源部51aの周囲には例えばシリコンゴム等の弾性体層からなる中間部51bが形成され、中間部51bの周囲には表面部51cが形成されている。表面部51cはPFA(四フッ化エチレン−パーフルオロアルコキシエチレン共重合樹脂)チューブ等からなる離型層が形成されたロール部材から形成されている。表面部51cの表面付近には、センサ110がヒートロール51に埋め込まれるように設けられている。
【0016】
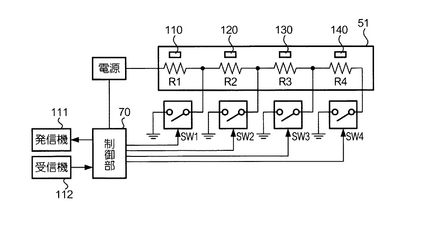
図4にヒートロール51の電気配線を示した。発熱体R1、R2、R3およびR4はそれぞれスイッチSW1、SW2、SW3およびSW4に接続され、後述する制御部70からの信号に応じてスイッチがON/OFFする。また、発熱体R1、R2、R3およびR4のそれぞれの近傍には、複数のワイヤレスセンサ110、120、130および140が設けられている。なお、以下の説明において、ワイヤレスセンサ110、120、130および140を総称して説明する場合は、単にワイヤレスセンサと称する。ワイヤレスセンサには制御部70の制御により発信機111から電波が発信される。そして、ワイヤレスセンサの内部において、電波が弾性表面波に変換され、変換された弾性表面波はワイヤレスセンサが受ける温度によってその属性(周波数、振幅、位相など)が変化する。そして、その弾性表面波は電波に変換されて受信機112に送信される。受信機112が受信した情報を元に制御部70はヒートロール各所の温度の制御を行う(ワイヤレスセンサについての詳細は後述する)。
【0017】
加圧ロール52は、金属製コアの周囲に弾性体層が形成され、さらにPFAチューブからなる離型層が形成されたロール部材であり、図示せぬ加圧バネ等によってヒートロール51の方向に付勢されている。定着装置50は、トナー像が二次転写された用紙に対し、定着ロール51及び加圧ロール52によって圧力を加えながら急速に加熱することによってトナー像を用紙に定着させる。この定着処理がなされた後に、用紙はガイド44に搬送され、次に排紙ロール43a,43bによって排紙トレイ46に排出される。
【0018】
なお、用紙の両面に画像を形成する場合には、まず、2次転写ロール19から用紙の一方の記録面に対して画像が転写され、定着装置50によって定着処理が施されると、その用紙は、排紙トレイ46に排出されるのではなく、いったん反転搬送路S’に搬送される。そして、この反転搬送路S’において用紙がスイッチバックさせられ、その記録面が反転させられた状態で、2次転写ロール19の位置に搬送される。そして、2次転写ロール19から用紙の他方の記録面に画像が転写されて定着処理が施される。この後、用紙は排紙ロール43a,43bによって排紙トレイ46に排出されることになる。
【0019】
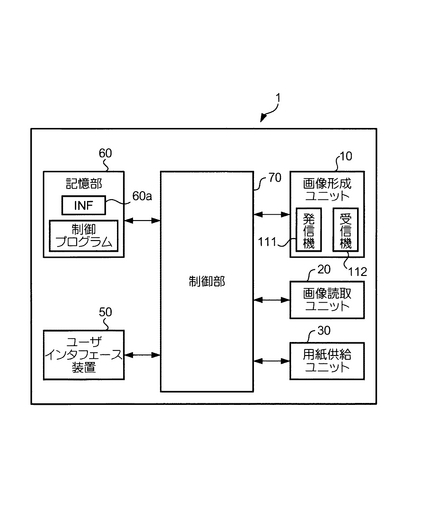
次に、図5のブロック図を参照しながら、画像形成装置1の制御系の構成について説明する。図5において、制御部70は、例えばMPU(Micro Processor Unit)や各種の特定用途向けのASIC(Application Specific Integrated Circuit)を備えており、記憶部60に記憶されている制御プログラムなどに従って、画像形成装置1の画像形成ユニット10、画像読取ユニット20及び用紙供給ユニット30の動作を制御する。また記憶部60にはヒートロール51によって用紙にトナー像を定着させる際に最適なヒートロール51の最適温度情報が記憶されているINF60aが格納されている。画像形成ユニット10には前述したワイヤレスセンサと電波の送受信を行う発信機111、受信機112が含まれており、制御部70はこれらの発信機111、受信機112を制御することにより、ヒートロール51の温度を監視し、さらにINF60aの最適温度情報を元にヒートロール51の温度を制御する。また、制御部70はヒートロール51の温度を監視することにより得られた結果をユーザインタフェース装置50によって表示する。
【0020】
次にワイヤレスセンサについて説明する。図6は、ワイヤレスセンサの基本構成となるワイヤレスセンサ200を示す。
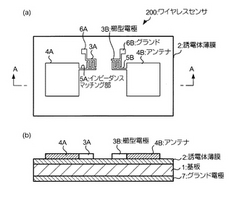
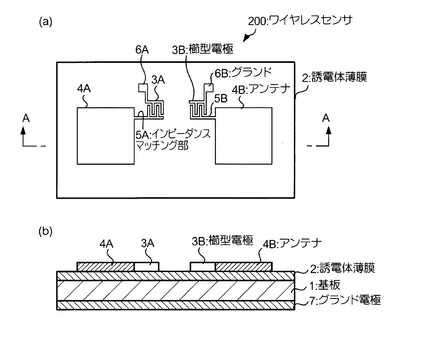
このワイヤレスセンサ200は、基台となる基板1と、該基板1上に形成され、弾性表面波(SAW:Surface Acoustic Wave)が伝播する誘電体薄膜2と、誘電体薄膜2上に形成され、電気信号から弾性表面波又は弾性表面波から電気信号に変換する変換部としての一対の櫛型電極(IDT:Inter-digital Transducer)3A,3Bと、この一対の櫛型電極3A,3Bの一方にインピーダンスマッチング部5A,5Bを介して接続され、外部の送受信機との間で電波の授受を行う送受信部としてのアンテナ4A,4Bと、一対の櫛型電極3A,3Bの他方に接続されたグランド6A,6Bと、基板1の裏面に形成され、グランド6A,6Bにスルーホール(図示しない)を介して接続されたグランド電極7とを具備して構成されている。
【0021】
このワイヤレスセンサ200における弾性表面波の周波数は、櫛型電極3A,3Bおよびインピーダンスマッチング部5A,5Bの形状で設定される。
基板1の材料としては、Si,Ge,ダイアモンド等の単体半導体、ガラス、AlAs,AlSb,AIP,GaAs,GaSb,InP,InAs,InSb,AlGaP,AlLnP,AlGaAs,AlInAs,AlAsSb,GaInAs,GaInSb,GaAsSb,InAsSb等のIII-V系の化合物半導体、ZnS,ZnSe,ZnTe,CaSe,CdTe,HgSe,HgTe,CdS等のII−VI系の化合物半導体、導電性或いは半導電性の単結晶基板としてはNb,La等をドープしたSrTiO3,AlをドープしたZnO,In2O3,RuO2,BaPbO3,SrRuO3,YBa2Cu2O7−X,SrVO3,LaNiO3,La0.5Sr0.5CoO3,ZnGa2O4,CdGa2O4,MgTiO4.MgTi2O4等の酸化物、またはPb,Pt,Al,Au,Ag等の金属等が挙げられるが、既存の半導体プロセスとの適合性やコスト面から、Si,GaAs、ガラス等の材料を用いることが好ましい。
【0022】
誘電体薄膜2の材料としては、SiO2,SrTiO3,BaTiO3,BaZrO2,LaAlO3,ZrO2,Y2O38%−ZrO2,MGO,MgAl2O4,LiNbO3,LiTaO3,AlVO3,ZnO等の酸化物、ABO3型のペロブスカイト型としてBaTiO3,PbTiO3,Pb1−XLaX(ZryTi1−y)1−X/4O3(x,yの値によりPZT,PLT,PLZT),Pb(Mg0-3Nb2/3)O3,KNbO3等の正方系、斜方系或いは疑立方晶系材料、疑イルメナイト構造体としてLiNbo3,LiTaO3等に代表される強誘電体等、またはタングステンブロンズ型として、SrXBa1−XNb2O6,PbXBaXNb2O6等が挙げられる。この他に、Bi4Ti3O12,Pb2KNb5O15,K3Li2Nb5O15、さらに以上列挙した強誘電体の置換誘電体等から選択される。さらに、鉛を含むABO3型のペロブスカイト型酸化物が好適に用いられる。特に、これらの材料のうちLiNbO3,LiTaO3,ZnO等の材料は、弾性表面波の表面速度、圧電定数等の変化が顕著でより好ましい。誘電体薄膜2の膜厚は、目的に応じて適宜選択されるが、通常は0.1μmから10μmの間に設定される。
【0023】
また、この誘電体薄膜2は、櫛型電極3A、3Bにおける電気機械結合係数/圧電係数、或いはアンテナ4の誘電損失等の観点から、エピタキシャルまたは単一配向性を有することが好ましい。また、誘電体薄膜2上にGaAS等のIII−V族半導体或いはダイヤモンド等の炭素を含有する薄膜を形成してもよい。これにより、弾性表面波の表面速度、結合係数、圧電定数等が向上できる。
【0024】
櫛型電極3A,3B、アンテナ4A,4B、インピーダンスマッチング部5A,5Bおよびグランド6A,6Bは、導電パターンにより一体的に形成される。この導電パターンの材料としては、Ti,Cr,Cu,W,Ni,Ta,Ga,In,Al,Pb,Pt,Au,Ag等の金属、またはTi−Al,Al−Cu,Ti−N,Ni−Cr等の合金を、単層もしくは2層以上の多層構造に積層することが好ましく、特に金属としてはAu,Ti,W,Al,Cuが好ましい。また、この金属層の膜厚は、1nm以上10μm未満とすることが好ましい。
【0025】
なお、本実施形態において図6に示すワイヤレスセンサ200の平面図において、便宜上、信号が図面向かって左側から右側に移動するものとするが、実際には信号の流れには方向性がある訳ではない。
【0026】
このワイヤレスセンサ200は、発信機111との間、受信機112との間で電波信号の授受を行う。発信機111から送信される電波信号はアンテナ4Aで受信され、この信号により櫛型電極3Aが誘電体薄膜2を励振して機械振動を発生させる。この機械振動は、誘電体薄膜2表面に弾性表面波を発生させる。この弾性表面波は、櫛型電極3Aから櫛型電極3Bに向けて移動し、櫛型電極3Bに到達した弾性表面波は、櫛型電極3Bで電気信号に変換されてアンテナ4Bを経由して送信される。受信機112は、ワイヤレスセンサ200からの電波信号を受信する。
【0027】
誘電体薄膜2の表面に発生する弾性表面波は、この誘電体薄膜2に加わった例えば温度などの物理量の変化によって、振幅、位相差、周波数等(属性)が変化する。この弾性表面波を受信した受信機112は、この電波信号を電気信号に変換して制御部70に伝送する。制御部70では、この電気信号を解析することにより、ワイヤレスセンサが受ける温度などの物理量を計測することが可能となる。
【0028】
以上が1つの周波数に対応したワイヤレスセンサの説明であるが、次に複数の周波数に対応できるワイヤレスセンサ200’について説明する。
上記のようなワイヤレスセンサ200をワイヤレスセンサ200’として利用するためには、図6に示した誘電体薄膜2の材料にLiNbO3を使用する。このLiNbO3の結晶は、弾性表面波の伝搬速度が温度変化に対して変化が少ない材質でその温度係数は約75×10−6/℃となる。この温度における伝搬速度の変化は、弾性表面波の周波数を変化させることになる。例えば、実験においては、温度が約100℃変化することにより、弾性表面波の中心周波数f0に対して約0.2〜0.3%程度周波数が変化する結果を得ている。
【0029】
ここで、アンテナ4A,4B、インピーダンスマッチング部5A,5Bおよび櫛型電極3A,3Bは、外部の発信機から送信される電波の中心周波数f0に合わしたBPFとして機能させるため、受信機112により受信した電波の強度は、周波数の変化によりシフトされることになる。このワイヤレスセンサ200’は、温度変化に応じて受信機112における受信信号の強度が線形に変化するワイヤレスの温度センサとなる。
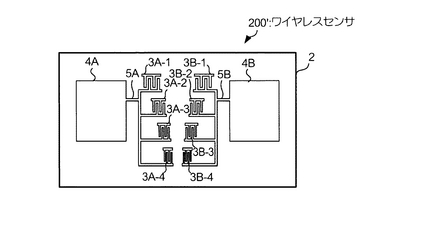
図7に示すように、ワイヤレスセンサ200´は、形状の異なる櫛型電極3A−1,3B−1…3A−4,3B−4が形成されている。このワイヤレスセンサ200´においては、外部から送信される電波信号の周波数により複数の周波数に対応した弾性表面波が誘電体薄膜2上に発生する。
【0030】
例えば、櫛型電極3A−1,3B−1およびインピーダンスマッチング部5A,5Bで設定される弾性表面波の周波数をf1、櫛型電極3A−2,3B−2およびインピーダンスマッチング部5A,5Bで設定される弾性表面波の周波数をf2、櫛型電極3A−3,3B−3およびインピーダンスマッチング部5A,5Bで設定される弾性表面波の周波数をf3、櫛型電極3A−4,3B−4およびインピーダンスマッチング部5A,5Bで設定される弾性表面波の周波数をf4とする。
なお、この図7では、グランドおよびグランド電極の図示は省略して描いている。
【0031】
ここで、外部の発信機111から周波数f1の電波信号が送信されると、櫛型電極3Aでは、この周波数f1に対応した電極3A−1が機械振動を発生し、この機械振動によって誘電体薄膜2上に弾性表面波が発生する。この弾性表面波が電極3B−1に伝達される。電極3B−1に伝達される弾性表面波は、温度の影響を受けてその属性が変化する。一方、他の櫛型電極3A−2,3B−2〜3A−4,3B−4においては、周波数f1に同調していないので、弾性表面波の発生やこれに基づく電波信号の送信は行われない。即ち、これらの櫛型電極3A−2,3B−2〜3A−4,3B−4は、各々周波数f2,f3,f4に同調するように設定されており、このため、周波数f2の電波をワイヤレスセンサ200’に送信した場合には、櫛型電極3A−2→3B−2という経路で弾性表面波が伝達され、この弾性表面波に対応した電波信号がアンテナ4Bを経由して出力される。
【0032】
同様に、周波数f3の電波信号をワイヤレスセンサ200’に送信した場合には、櫛型電極3A−3→3B−3という経路で弾性表面波が伝達されてアンテナ4Bを経由して出力され、周波数f4の電波信号をワイヤレスセンサ200’に送信した場合には、櫛型電極3A−4→3B−4という経路で弾性表面波が伝達されてアンテナ4Bを経由して出力される。
従って、周波数f1,f2,f3,f4の順でワイヤレスセンサ200’に電波を送信すれば、これらに対応する応答信号を得ることができる。またこの場合、櫛型電極3B−1,3B−2,3B−3,3B−4(出力側)から出力される信号の変化帯域(温度による変化の幅)を重複しないように設定しておけば、周波数f1〜f4を同時にワイヤレスセンサ200’に出力しても、その応答信号として出力される4つの信号を分離して解析することができる。
【0033】
ここで、4カ所の測定位置a〜dに個々に配置されたワイヤレスセンサを200´−1,200´−2,200´−3,200´−4とする。この場合には、外部から送信される電波信号の周波数を個々の周波数f1〜f4に設定して発信することにより、対象となるワイヤレスセンサ200´により温度が測定される。
【0034】
具体的には、ワイヤレスセンサ200は、弾性表面波の周波数が、櫛型電極3A,3Bの形状で設定されるため、ワイヤレスセンサ200’−1には、図3に示したワイヤレスセンサ200’の櫛型電極3A−1,3B−1が形成され、ワイヤレスセンサ200’−2にはワイヤレスセンサ200’の櫛型電極3A−2,3B−2が形成され、ワイヤレスセンサ200’−3にはワイヤレスセンサ200’の櫛型電極3A−3,3B−3が形成され、ワイヤレスセンサ200’−4にはワイヤレスセンサ200’の櫛型電極3A−4,3B−4が形成される。これにより、ワイヤレスセンサ200の誘電体薄膜に発生する弾性表面波の周波数が、ワイヤレスセンサ200’−1がf1、ワイヤレスセンサ200’−2がf2、ワイヤレスセンサ200’−3がf3、ワイヤレスセンサ200’−4がf4となる。即ち、受信する電波信号の周波数f1〜f4によってワイヤレスセンサ200’−1〜200’−4が特定されることになる。
【0035】
このため、周波数f1の電波信号では測定位置aに配置されたワイヤレスセンサ200’−1による測定が、周波数f2の電波信号では測定位置bに配置されたワイヤレスセンサ200’−2による測定が、周波数f3の電波信号では測定位置cに配置されたワイヤレスセンサ200’−3による測定が、周波数f4の電波信号では測定位置dに配置されたワイヤレスセンサ200’−4による測定が可能となる。
【0036】
上記のようなワイヤレスのワイヤレスセンサ200’−1を本実施形態においてはワイヤレスセンサ110として使用する。同じように、ワイヤレスセンサ200’−2をワイヤレスセンサ120、200’−3をワイヤレスセンサ130、そして200’−4をワイヤレスセンサ140とする。
【0037】
次に、ヒートロール51の複数の部位に設置されたワイヤレスセンサ110、120、130および140の信号処理動作について、図8を参照しつつ説明する。
この使用例では、ワイヤレスセンサは、発信機111からの電波を受けて個々の櫛型電極で設定された周波数の弾性表面波を誘電体薄膜2上に発生させ、温度に応じて弾性表面波の周波数を変化させて受信機112に向けて温度変化に対応した周波数の信号を送信する。そして、受信機112では、受信した信号を解析して個々のセンサが設置された位置の温度を得る。
【0038】
次に、発信機111および受信機112の構成および動作について説明する。
発信機111は、制御部70の制御により、周波数f1,f2,f3,f4の矩形状波を合わせた電波を発信する。
受信機112は、ワイヤレスセンサから発信される信号を受信するアンテナ113と、受信した信号をデジタル化するRF部及びデジタル化を行う信号変換部とそれらに基づき、解析・演算を行う制御部114とを備えている。ここで、制御部114はマイクロコンピュータからなり、CPU(Central Processing Unit)114A、ROM(Read Only Memory)114B、RAM(Random Access Memory)114C等を具備して構成されている。ROM114Bには、ワイヤレスセンサ110、120、130および140の設定周波数f1〜f4近傍を抽出するBPF機能、周波数変化から温度に換算する演算機能等のプログラムが格納されている。RAM114Cは、前記プログラムを実行する際のワークエリアとして利用される。また、記憶エリア114Dには周波数の変化分から温度を算出するためのテーブル(または換算式)が記憶されている。
【0039】
次に、受信機112における受信電波の処理を図9のフローチャートに基づいて説明する。
この受信機112は、4個のワイヤレスセンサ110、120、130および140から発信される電波を受信する。
まず、CPU114Aは、アンテナ113を介してワイヤレスセンサ110、120、130および140からの電波を受信する(ステップS1)。受信は、4つの周波数について同時に行われる。そしてCPU114Aは図示しないカウンタを「n=0」に設定し(ステップS2)、周波数f1近傍を抽出するBPF処理を行い(ステップS3)、予め記憶エリア114Dに記憶されたテーブルからワイヤレスセンサ110によって計測された温度を算出する(ステップS4)。さらに、この結果をRAM114Cに記憶する(ステップS5)
【0040】
CPU114Aはカウンタを歩進して「n=n+1」とし(ステップS6)、このnが4以上になったか否かを判定する(ステップS7)。この判定で、カウンタ値「4」未満の場合には各センサからの測定が終了していないために、ステップS3以降の処理を続行し、カウンタ値「4」に達した場合には、4個のセンサに対しての測定結果が算出されたものとして、次のステップS8に移る。
ステップS8では、CPU114AはRAM114Cに記憶された測定結果を制御部70に送信する。そして制御部70は記憶部60のINF60aに記憶されている最適温度情報を読み出し、CPU114Aからの情報を元にヒートロール51の各所が最適温度であるかを判断する。つまり、ワイヤレスセンサ110が検知した温度が最適温度よりも低い場合、CPU114AはスイッチSW1をONする(既にONの場合はONを維持)。逆にワイヤレスセンサ110が検知した温度が最適温度よりも高い場合、CPU114AはスイッチSW1をOFFする(既にOFFの場合はOFFを維持)。同じようにワイヤレスセンサ120、130および140が検知した温度についてもINF60aに記憶されている最適温度情報をもとに最適温度であるか否かを判断し、スイッチSW2、SW3およびSW4をON/OFFする。このような動作を行うことにより、例えば、幅の狭い用紙が連続してヒートロール51を通過した場合、紙が通過しないヒートロール51の領域の温度が最適温度よりも高くなった場合、スイッチSW1〜4をON/OFFすることにより、ヒートロール51全体を常に最適な温度に保つことができる。またワイヤレスセンサが検知した温度が異常であった場合、ユーザインタフェース装置50にその旨を表示する。
【0041】
以上説明したように本実施形態によれば、ヒートロール51に設置するセンサはワイヤレスセンサであるため、従来のセンサのようにケーブルを配設する必要がない。そのため、センサを配置する際、配置する場所を特定の場所にとどめることなく、自由に配置することができる。また、ケーブルの収納場所を設ける必要がないため、設計の自由度が上がる。さらに、検知制度を上げるために複数のセンサを配置しようとすると、従来の技術においては、センサを増やす毎にケーブルを配設しなくてはならなかったため、センサの追加はコストアップにつながっていたが、本発明においてはケーブルは不要であるため、コストを抑え検知制度を上げることができる。
【0042】
なお、本実施形態においては、ヒートロール51に設置したワイヤレスセンサは4つである場合を示したが、設置するワイヤレスセンサは4つに限らない。その場合、設置するワイヤレスセンサの数に応じて、形状の異なる櫛形電極3A、3B(図6参照)をワイヤレスセンサに設ける。
【図面の簡単な説明】
【0043】
【図1】本発明の実施形態に係る画像形成装置の構成を示す図である。
【図2】ヒートロールの正面図である。
【図3】ヒートロールの断面図である。
【図4】ヒートロールの電気回路図である。
【図5】画像形成装置の全体構成を示すブロック図である。
【図6】1対の櫛型電極を有したワイヤレスセンサの上面図と断面図である。
【図7】4対の櫛型電極を有したワイヤレスセンサの上面図である。
【図8】ワイヤレスセンサ、受信機および発信機の構成図である。
【図9】受信機のCPUが行う手順を示したフローチャートである。
【符号の説明】
【0044】
3A,3B・・・櫛形電極、4A,4B・・・アンテナ、5A,5B・・・インピーダンスマッチング部、6A,6B・・・グランド、111・・・発信機、112・・・受信機、110,120,130,140・・・ワイヤレスセンサ
【技術分野】
【0001】
本発明は、画像形成装置等に用いるトナー像を転写材に定着させるヒートロールの表面温度を検知し、ヒートロールの表面温度を制御する画像形成装置に関する。
【背景技術】
【0002】
従来から、電子写真プロセスを用いた複写機、レーザプリンタ等の画像形成装置においては、記録用紙上に転写した未定着のトナー像を定着するために、例えば、内部にヒータを備えた定着ローラ(ヒートロール)が利用されている。具体的には、転写工程を通過した記録用紙を、ヒートロールと、ヒートロールに対向して設けられている加圧ローラによって上下から圧接し、ヒートロールが記録用紙を加熱することにより、未定着トナー像のトナーを記録用紙に癒着させ、定着させる。このときトナー像を記録用紙に定着させるためにはヒートロールの表面温度を一定の高温に保つ温度制御を行う必要があり、そのために、ヒートロールの表面温度を検知する検知装置が必要になる。
【0003】
そこで、特許文献1には、サーミスタ素子を用いた温度センサによってヒートロールの表面温度を検知する技術が開示されている。温度センサは赤外線吸収性ガラスで溶封されていて、ヒートロールに対して非接触になるように固定されている。そして、温度センサが感知した温度はケーブルを介して画像形成装置本体の温度測定回路に伝えられる。
【特許文献1】特開2004−205417号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
しかしながら、従来の技術では温度センサはケーブルにつながれているため、センサの自由な配置が難しいという問題があった。また、例えば小サイズの記録用紙(記録用紙のサイズがヒートロールの軸方向の長さに対して小さい場合)が連続してヒートロール上を通過する際、紙が通過しない領域のヒートロールの温度が上昇するということが起こる。そのため、ヒートロールの周方向で複数箇所の温度を検知し、制御する必要があるが、特許文献1の技術でこれを行おうとすれば、温度センサの数に応じたケーブルが必要となる。そのため、設けた複数のケーブルを収納するスペースを確保しなくてはならず、設計の自由度が制限されると共に、コストアップの要因となっていた。
【0005】
本発明はこのような事情に鑑みてなされたものであり、その目的は、ケーブル配設の問題を無くし、ヒートロールの温度を複数箇所において検知し、ヒートロールの温度を制御する画像形成装置を提供することにある。
【課題を解決するための手段】
【0006】
上記課題を解決するために、本発明は、記録用紙にトナー像を形成し、前記記録用紙に前記トナー像を定着させるために前記記録用紙を加熱するヒートロールを有する画像形成装置であって、前記ヒートロールの内部に設けられた発熱源と、前記ヒートロールの表面付近に設けられ、前記ヒートロールの表面付近の温度を電波信号に変えて送信するワイヤレスの温度測定手段と、前記温度測定手段から出力される電波を受信し、この受信した電波信号に基づいて前記ヒートロールの温度を算出する受信手段と、前記受信手段で算出された温度に基づき、前記発熱源の温度を制御する制御手段とを備える画像形成装置を提供する。
【0007】
この画像形成装置によれば、発熱源によって内側から加熱するように構成されたヒートロールにワイヤレス温度測定手段を設け、ヒートロールの温度を検知する。このワイヤレスの温度測定手段は、温度を電波に変えて出力する。そして、出力された電波を受信手段が受信し、ヒートロールの温度を算出する。算出した温度を元に、制御手段がヒートロールの温度を制御する。温度測定手段と、受信手段の間で送受信される情報は電波であるため、ケーブルを設置することなくヒートロールの温度を検知し、制御することができる。
【0008】
本発明の好ましい態様においては、前記温度測定手段は、電波信号が供給されると、それをエネルギー源として前記ヒートロールの表面付近の温度を反映した属性と識別情報とを持った電波信号を生成して出力するものが好ましい。このような構成の温度測定手段としては、例えば、INFRATAB.inc社のINFRATAB Fresh Alert(商標登録)など、公知のRFID(Radio Frequency Identification)等を備えたパッシブ型ワイヤレスセンサなどがある。また、電波を受信して機械振動を発生させる励振部と、前記励振部が発生した機械振動が伝達されて弾性表面波を発生するとともに、前記弾性表面波の属性が温度によって変化する振動媒体部と、前記弾性表面波を電気信号に変換して電波信号として出力する送信部とを備えるようにすることが、さらに好ましい。
【発明を実施するための最良の形態】
【0009】
図1は、実施形態に係る画像形成装置1の全体構成を示した図である。この画像形成装置1は、例えばカラープリンタやカラー複写機、或いはこれらの複数の機能を兼ね備えた複合機等である。図1に示すように、画像形成装置1の構成は、画像形成ユニット10と、画像読取ユニット20と、用紙供給ユニット30とに大別される。さらに、画像形成装置1は、ユーザが各種の操作を行うためのユーザインタフェース装置50を備えている。このユーザインタフェース装置50は、タッチパネルとして機能する液晶ディスプレイを備えており、ユーザはこの液晶ディスプレイに触れることで各種操作を行うことができる。
【0010】
用紙供給ユニット30は、用紙トレイ31a,31b,31c及び手差しトレイ32といった用紙供給源と、この用紙供給源から図中の点線Sによって示される搬送路を経由して画像形成ユニット10へ用紙を搬送するための搬送ロール34a〜34cやレジストロール34dとを備えている。より具体的には、用紙トレイ31a,31b,31cにそれぞれ収容された用紙P1,P2,P3は、各用紙トレイ31a,31b,31cに設けられた給紙ロール311a,311b,311cによって1枚ずつ搬送路Sに送り出され、さらに、搬送ロール34a〜34cやレジストロール34dによって画像形成ユニット10へと搬送される。また、手差しトレイ32の上面には用紙P4が複数枚載置されるようになっている。これらの用紙P4は給紙ロール321によって1枚ずつ搬送路Sに送り出され、さらに、搬送ロール34a〜34cやレジストロール34dによって画像形成ユニット10へと搬送されるようになっている。なお、搬送路Sには、用紙の両面に画像を形成するための反転搬送路S’が含まれている。
【0011】
画像読取ユニット20は、原稿送り装置21と、CCD(Charge Coupled Device)等により構成される光学系部材22とを備えている。画像読取ユニット20は、原稿送り装置21によって図示せぬプラテンガラスに順番に載置される原稿の画像を光学系部材22によって読み取り、読み取った画像を表す画像データを生成する。また、画像形成装置1は図示しない通信インタフェースを介してLAN(Local Area Network)等のネットワークに接続されており、パーソナルコンピュータやサーバマシンなどのホスト装置からLANを経由して送信されてくる画像データを受信する。画像形成ユニット10は、画像読取ユニット20によって生成された画像データや、通信インタフェースを介して受信した画像データに基づいて画像形成処理を行う。これらの画像データは、ユーザが所望する任意の画像を表すためのデータである。
【0012】
次に、画像形成ユニット10は、感光体ドラム11と、帯電装置12と、露光装置13とを備えている。感光体ドラム11の外周面(ドラム表面)には感光層が形成されており、この感光体ドラム11は図示せぬ駆動機構によって図中矢印a方向に回転させられる。帯電装置12は、例えばロール型帯電装置やコロトロン型帯電装置であり、感光体ドラム11の表面を所定の電位に一様に帯電させる。露光装置13は、一様に帯電した感光体ドラム11に対し、画像データに応じて変調されたレーザ光を照射し、感光体ドラム11の表面に静電潜像を形成する。
【0013】
また、画像形成ユニット10はロータリー現像装置14(タンデム型も含む)と、クリーニング装置15と、中間転写ベルト16とを備えている。ロータリー現像装置14は、それぞれY(イエロー)、M(マゼンタ)、C(シアン)、K(ブラック)の各色のトナー(現像剤)をそれぞれ収容する現像器14Y,14M,14C,14Kを備えている。このロータリー現像装置14が図示せぬ駆動機構によって図中矢印b方向に回転させられることにより、これら4つの現像器14Y,14M,14C,14Kは順番に感光体ドラム11と近接した位置に移動させられる。そして、各現像器14Y,14M,14C,14Kに収容された各トナーが、それぞれの色に対応する静電潜像に電気的に転移させられることによって、感光体ドラム11の表面にトナー像が形成される。感光体ドラム11近傍に設けられたクリーニングブレード15は、一次転写後の感光体ドラム11表面に残ったトナーを除去する。
【0014】
中間転写ベルト16は、無端のベルト部材であり、その内周面を複数の支持ロール17(図1では2つ)と一次転写ロール18と二次転写ロール19とによって張架された状態で、矢印c方向に周回移動させられる。一次転写ロール18は、感光体ドラム11との間で中間転写ベルト16を挟持しつつ、感光体ドラム11表面に形成されたトナー像を中間転写ベルト16の外周面に転写(一次転写)する。二次転写ロール19は、対向ロール40との間に形成されるニップ領域において、中間転写ベルト16の外周面に転写されているトナー像を用紙へ転写(二次転写)する。また、画像形成ユニット10はベルトクリーナ23を保持しており、二次転写後の中間転写ベルト16の表面に残留しているトナーを除去する。
【0015】
定着装置50は、搬送路Sを挟んで互いに対向するヒートロール51、及び加圧ロール52を備えている。ヒートロール51を上から見た図を図2に示す。図2に示すように、ヒートロール51には点線で示したワイヤレスセンサ110、120、130および140が埋め込まれている。これらのワイヤレスセンサとの電波の送受信を図1の点線で示した送信機111および受信機112が行う。ヒートロール51のA―A’断面図を図3に示す。ヒートロール51は熱源部51a、中間部51b、表面部51cから形成され、熱源部51aはアルミニウム等の金属製コアで形成されている。また、熱源部51aの内部には例えばハロゲンランプ等で構成された発熱体が設けられており、ヒートロール51の表面を内部から加熱する。熱源部51aの周囲には例えばシリコンゴム等の弾性体層からなる中間部51bが形成され、中間部51bの周囲には表面部51cが形成されている。表面部51cはPFA(四フッ化エチレン−パーフルオロアルコキシエチレン共重合樹脂)チューブ等からなる離型層が形成されたロール部材から形成されている。表面部51cの表面付近には、センサ110がヒートロール51に埋め込まれるように設けられている。
【0016】
図4にヒートロール51の電気配線を示した。発熱体R1、R2、R3およびR4はそれぞれスイッチSW1、SW2、SW3およびSW4に接続され、後述する制御部70からの信号に応じてスイッチがON/OFFする。また、発熱体R1、R2、R3およびR4のそれぞれの近傍には、複数のワイヤレスセンサ110、120、130および140が設けられている。なお、以下の説明において、ワイヤレスセンサ110、120、130および140を総称して説明する場合は、単にワイヤレスセンサと称する。ワイヤレスセンサには制御部70の制御により発信機111から電波が発信される。そして、ワイヤレスセンサの内部において、電波が弾性表面波に変換され、変換された弾性表面波はワイヤレスセンサが受ける温度によってその属性(周波数、振幅、位相など)が変化する。そして、その弾性表面波は電波に変換されて受信機112に送信される。受信機112が受信した情報を元に制御部70はヒートロール各所の温度の制御を行う(ワイヤレスセンサについての詳細は後述する)。
【0017】
加圧ロール52は、金属製コアの周囲に弾性体層が形成され、さらにPFAチューブからなる離型層が形成されたロール部材であり、図示せぬ加圧バネ等によってヒートロール51の方向に付勢されている。定着装置50は、トナー像が二次転写された用紙に対し、定着ロール51及び加圧ロール52によって圧力を加えながら急速に加熱することによってトナー像を用紙に定着させる。この定着処理がなされた後に、用紙はガイド44に搬送され、次に排紙ロール43a,43bによって排紙トレイ46に排出される。
【0018】
なお、用紙の両面に画像を形成する場合には、まず、2次転写ロール19から用紙の一方の記録面に対して画像が転写され、定着装置50によって定着処理が施されると、その用紙は、排紙トレイ46に排出されるのではなく、いったん反転搬送路S’に搬送される。そして、この反転搬送路S’において用紙がスイッチバックさせられ、その記録面が反転させられた状態で、2次転写ロール19の位置に搬送される。そして、2次転写ロール19から用紙の他方の記録面に画像が転写されて定着処理が施される。この後、用紙は排紙ロール43a,43bによって排紙トレイ46に排出されることになる。
【0019】
次に、図5のブロック図を参照しながら、画像形成装置1の制御系の構成について説明する。図5において、制御部70は、例えばMPU(Micro Processor Unit)や各種の特定用途向けのASIC(Application Specific Integrated Circuit)を備えており、記憶部60に記憶されている制御プログラムなどに従って、画像形成装置1の画像形成ユニット10、画像読取ユニット20及び用紙供給ユニット30の動作を制御する。また記憶部60にはヒートロール51によって用紙にトナー像を定着させる際に最適なヒートロール51の最適温度情報が記憶されているINF60aが格納されている。画像形成ユニット10には前述したワイヤレスセンサと電波の送受信を行う発信機111、受信機112が含まれており、制御部70はこれらの発信機111、受信機112を制御することにより、ヒートロール51の温度を監視し、さらにINF60aの最適温度情報を元にヒートロール51の温度を制御する。また、制御部70はヒートロール51の温度を監視することにより得られた結果をユーザインタフェース装置50によって表示する。
【0020】
次にワイヤレスセンサについて説明する。図6は、ワイヤレスセンサの基本構成となるワイヤレスセンサ200を示す。
このワイヤレスセンサ200は、基台となる基板1と、該基板1上に形成され、弾性表面波(SAW:Surface Acoustic Wave)が伝播する誘電体薄膜2と、誘電体薄膜2上に形成され、電気信号から弾性表面波又は弾性表面波から電気信号に変換する変換部としての一対の櫛型電極(IDT:Inter-digital Transducer)3A,3Bと、この一対の櫛型電極3A,3Bの一方にインピーダンスマッチング部5A,5Bを介して接続され、外部の送受信機との間で電波の授受を行う送受信部としてのアンテナ4A,4Bと、一対の櫛型電極3A,3Bの他方に接続されたグランド6A,6Bと、基板1の裏面に形成され、グランド6A,6Bにスルーホール(図示しない)を介して接続されたグランド電極7とを具備して構成されている。
【0021】
このワイヤレスセンサ200における弾性表面波の周波数は、櫛型電極3A,3Bおよびインピーダンスマッチング部5A,5Bの形状で設定される。
基板1の材料としては、Si,Ge,ダイアモンド等の単体半導体、ガラス、AlAs,AlSb,AIP,GaAs,GaSb,InP,InAs,InSb,AlGaP,AlLnP,AlGaAs,AlInAs,AlAsSb,GaInAs,GaInSb,GaAsSb,InAsSb等のIII-V系の化合物半導体、ZnS,ZnSe,ZnTe,CaSe,CdTe,HgSe,HgTe,CdS等のII−VI系の化合物半導体、導電性或いは半導電性の単結晶基板としてはNb,La等をドープしたSrTiO3,AlをドープしたZnO,In2O3,RuO2,BaPbO3,SrRuO3,YBa2Cu2O7−X,SrVO3,LaNiO3,La0.5Sr0.5CoO3,ZnGa2O4,CdGa2O4,MgTiO4.MgTi2O4等の酸化物、またはPb,Pt,Al,Au,Ag等の金属等が挙げられるが、既存の半導体プロセスとの適合性やコスト面から、Si,GaAs、ガラス等の材料を用いることが好ましい。
【0022】
誘電体薄膜2の材料としては、SiO2,SrTiO3,BaTiO3,BaZrO2,LaAlO3,ZrO2,Y2O38%−ZrO2,MGO,MgAl2O4,LiNbO3,LiTaO3,AlVO3,ZnO等の酸化物、ABO3型のペロブスカイト型としてBaTiO3,PbTiO3,Pb1−XLaX(ZryTi1−y)1−X/4O3(x,yの値によりPZT,PLT,PLZT),Pb(Mg0-3Nb2/3)O3,KNbO3等の正方系、斜方系或いは疑立方晶系材料、疑イルメナイト構造体としてLiNbo3,LiTaO3等に代表される強誘電体等、またはタングステンブロンズ型として、SrXBa1−XNb2O6,PbXBaXNb2O6等が挙げられる。この他に、Bi4Ti3O12,Pb2KNb5O15,K3Li2Nb5O15、さらに以上列挙した強誘電体の置換誘電体等から選択される。さらに、鉛を含むABO3型のペロブスカイト型酸化物が好適に用いられる。特に、これらの材料のうちLiNbO3,LiTaO3,ZnO等の材料は、弾性表面波の表面速度、圧電定数等の変化が顕著でより好ましい。誘電体薄膜2の膜厚は、目的に応じて適宜選択されるが、通常は0.1μmから10μmの間に設定される。
【0023】
また、この誘電体薄膜2は、櫛型電極3A、3Bにおける電気機械結合係数/圧電係数、或いはアンテナ4の誘電損失等の観点から、エピタキシャルまたは単一配向性を有することが好ましい。また、誘電体薄膜2上にGaAS等のIII−V族半導体或いはダイヤモンド等の炭素を含有する薄膜を形成してもよい。これにより、弾性表面波の表面速度、結合係数、圧電定数等が向上できる。
【0024】
櫛型電極3A,3B、アンテナ4A,4B、インピーダンスマッチング部5A,5Bおよびグランド6A,6Bは、導電パターンにより一体的に形成される。この導電パターンの材料としては、Ti,Cr,Cu,W,Ni,Ta,Ga,In,Al,Pb,Pt,Au,Ag等の金属、またはTi−Al,Al−Cu,Ti−N,Ni−Cr等の合金を、単層もしくは2層以上の多層構造に積層することが好ましく、特に金属としてはAu,Ti,W,Al,Cuが好ましい。また、この金属層の膜厚は、1nm以上10μm未満とすることが好ましい。
【0025】
なお、本実施形態において図6に示すワイヤレスセンサ200の平面図において、便宜上、信号が図面向かって左側から右側に移動するものとするが、実際には信号の流れには方向性がある訳ではない。
【0026】
このワイヤレスセンサ200は、発信機111との間、受信機112との間で電波信号の授受を行う。発信機111から送信される電波信号はアンテナ4Aで受信され、この信号により櫛型電極3Aが誘電体薄膜2を励振して機械振動を発生させる。この機械振動は、誘電体薄膜2表面に弾性表面波を発生させる。この弾性表面波は、櫛型電極3Aから櫛型電極3Bに向けて移動し、櫛型電極3Bに到達した弾性表面波は、櫛型電極3Bで電気信号に変換されてアンテナ4Bを経由して送信される。受信機112は、ワイヤレスセンサ200からの電波信号を受信する。
【0027】
誘電体薄膜2の表面に発生する弾性表面波は、この誘電体薄膜2に加わった例えば温度などの物理量の変化によって、振幅、位相差、周波数等(属性)が変化する。この弾性表面波を受信した受信機112は、この電波信号を電気信号に変換して制御部70に伝送する。制御部70では、この電気信号を解析することにより、ワイヤレスセンサが受ける温度などの物理量を計測することが可能となる。
【0028】
以上が1つの周波数に対応したワイヤレスセンサの説明であるが、次に複数の周波数に対応できるワイヤレスセンサ200’について説明する。
上記のようなワイヤレスセンサ200をワイヤレスセンサ200’として利用するためには、図6に示した誘電体薄膜2の材料にLiNbO3を使用する。このLiNbO3の結晶は、弾性表面波の伝搬速度が温度変化に対して変化が少ない材質でその温度係数は約75×10−6/℃となる。この温度における伝搬速度の変化は、弾性表面波の周波数を変化させることになる。例えば、実験においては、温度が約100℃変化することにより、弾性表面波の中心周波数f0に対して約0.2〜0.3%程度周波数が変化する結果を得ている。
【0029】
ここで、アンテナ4A,4B、インピーダンスマッチング部5A,5Bおよび櫛型電極3A,3Bは、外部の発信機から送信される電波の中心周波数f0に合わしたBPFとして機能させるため、受信機112により受信した電波の強度は、周波数の変化によりシフトされることになる。このワイヤレスセンサ200’は、温度変化に応じて受信機112における受信信号の強度が線形に変化するワイヤレスの温度センサとなる。
図7に示すように、ワイヤレスセンサ200´は、形状の異なる櫛型電極3A−1,3B−1…3A−4,3B−4が形成されている。このワイヤレスセンサ200´においては、外部から送信される電波信号の周波数により複数の周波数に対応した弾性表面波が誘電体薄膜2上に発生する。
【0030】
例えば、櫛型電極3A−1,3B−1およびインピーダンスマッチング部5A,5Bで設定される弾性表面波の周波数をf1、櫛型電極3A−2,3B−2およびインピーダンスマッチング部5A,5Bで設定される弾性表面波の周波数をf2、櫛型電極3A−3,3B−3およびインピーダンスマッチング部5A,5Bで設定される弾性表面波の周波数をf3、櫛型電極3A−4,3B−4およびインピーダンスマッチング部5A,5Bで設定される弾性表面波の周波数をf4とする。
なお、この図7では、グランドおよびグランド電極の図示は省略して描いている。
【0031】
ここで、外部の発信機111から周波数f1の電波信号が送信されると、櫛型電極3Aでは、この周波数f1に対応した電極3A−1が機械振動を発生し、この機械振動によって誘電体薄膜2上に弾性表面波が発生する。この弾性表面波が電極3B−1に伝達される。電極3B−1に伝達される弾性表面波は、温度の影響を受けてその属性が変化する。一方、他の櫛型電極3A−2,3B−2〜3A−4,3B−4においては、周波数f1に同調していないので、弾性表面波の発生やこれに基づく電波信号の送信は行われない。即ち、これらの櫛型電極3A−2,3B−2〜3A−4,3B−4は、各々周波数f2,f3,f4に同調するように設定されており、このため、周波数f2の電波をワイヤレスセンサ200’に送信した場合には、櫛型電極3A−2→3B−2という経路で弾性表面波が伝達され、この弾性表面波に対応した電波信号がアンテナ4Bを経由して出力される。
【0032】
同様に、周波数f3の電波信号をワイヤレスセンサ200’に送信した場合には、櫛型電極3A−3→3B−3という経路で弾性表面波が伝達されてアンテナ4Bを経由して出力され、周波数f4の電波信号をワイヤレスセンサ200’に送信した場合には、櫛型電極3A−4→3B−4という経路で弾性表面波が伝達されてアンテナ4Bを経由して出力される。
従って、周波数f1,f2,f3,f4の順でワイヤレスセンサ200’に電波を送信すれば、これらに対応する応答信号を得ることができる。またこの場合、櫛型電極3B−1,3B−2,3B−3,3B−4(出力側)から出力される信号の変化帯域(温度による変化の幅)を重複しないように設定しておけば、周波数f1〜f4を同時にワイヤレスセンサ200’に出力しても、その応答信号として出力される4つの信号を分離して解析することができる。
【0033】
ここで、4カ所の測定位置a〜dに個々に配置されたワイヤレスセンサを200´−1,200´−2,200´−3,200´−4とする。この場合には、外部から送信される電波信号の周波数を個々の周波数f1〜f4に設定して発信することにより、対象となるワイヤレスセンサ200´により温度が測定される。
【0034】
具体的には、ワイヤレスセンサ200は、弾性表面波の周波数が、櫛型電極3A,3Bの形状で設定されるため、ワイヤレスセンサ200’−1には、図3に示したワイヤレスセンサ200’の櫛型電極3A−1,3B−1が形成され、ワイヤレスセンサ200’−2にはワイヤレスセンサ200’の櫛型電極3A−2,3B−2が形成され、ワイヤレスセンサ200’−3にはワイヤレスセンサ200’の櫛型電極3A−3,3B−3が形成され、ワイヤレスセンサ200’−4にはワイヤレスセンサ200’の櫛型電極3A−4,3B−4が形成される。これにより、ワイヤレスセンサ200の誘電体薄膜に発生する弾性表面波の周波数が、ワイヤレスセンサ200’−1がf1、ワイヤレスセンサ200’−2がf2、ワイヤレスセンサ200’−3がf3、ワイヤレスセンサ200’−4がf4となる。即ち、受信する電波信号の周波数f1〜f4によってワイヤレスセンサ200’−1〜200’−4が特定されることになる。
【0035】
このため、周波数f1の電波信号では測定位置aに配置されたワイヤレスセンサ200’−1による測定が、周波数f2の電波信号では測定位置bに配置されたワイヤレスセンサ200’−2による測定が、周波数f3の電波信号では測定位置cに配置されたワイヤレスセンサ200’−3による測定が、周波数f4の電波信号では測定位置dに配置されたワイヤレスセンサ200’−4による測定が可能となる。
【0036】
上記のようなワイヤレスのワイヤレスセンサ200’−1を本実施形態においてはワイヤレスセンサ110として使用する。同じように、ワイヤレスセンサ200’−2をワイヤレスセンサ120、200’−3をワイヤレスセンサ130、そして200’−4をワイヤレスセンサ140とする。
【0037】
次に、ヒートロール51の複数の部位に設置されたワイヤレスセンサ110、120、130および140の信号処理動作について、図8を参照しつつ説明する。
この使用例では、ワイヤレスセンサは、発信機111からの電波を受けて個々の櫛型電極で設定された周波数の弾性表面波を誘電体薄膜2上に発生させ、温度に応じて弾性表面波の周波数を変化させて受信機112に向けて温度変化に対応した周波数の信号を送信する。そして、受信機112では、受信した信号を解析して個々のセンサが設置された位置の温度を得る。
【0038】
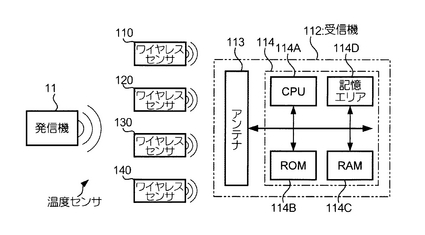
次に、発信機111および受信機112の構成および動作について説明する。
発信機111は、制御部70の制御により、周波数f1,f2,f3,f4の矩形状波を合わせた電波を発信する。
受信機112は、ワイヤレスセンサから発信される信号を受信するアンテナ113と、受信した信号をデジタル化するRF部及びデジタル化を行う信号変換部とそれらに基づき、解析・演算を行う制御部114とを備えている。ここで、制御部114はマイクロコンピュータからなり、CPU(Central Processing Unit)114A、ROM(Read Only Memory)114B、RAM(Random Access Memory)114C等を具備して構成されている。ROM114Bには、ワイヤレスセンサ110、120、130および140の設定周波数f1〜f4近傍を抽出するBPF機能、周波数変化から温度に換算する演算機能等のプログラムが格納されている。RAM114Cは、前記プログラムを実行する際のワークエリアとして利用される。また、記憶エリア114Dには周波数の変化分から温度を算出するためのテーブル(または換算式)が記憶されている。
【0039】
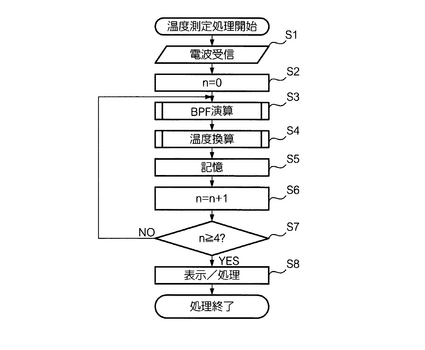
次に、受信機112における受信電波の処理を図9のフローチャートに基づいて説明する。
この受信機112は、4個のワイヤレスセンサ110、120、130および140から発信される電波を受信する。
まず、CPU114Aは、アンテナ113を介してワイヤレスセンサ110、120、130および140からの電波を受信する(ステップS1)。受信は、4つの周波数について同時に行われる。そしてCPU114Aは図示しないカウンタを「n=0」に設定し(ステップS2)、周波数f1近傍を抽出するBPF処理を行い(ステップS3)、予め記憶エリア114Dに記憶されたテーブルからワイヤレスセンサ110によって計測された温度を算出する(ステップS4)。さらに、この結果をRAM114Cに記憶する(ステップS5)
【0040】
CPU114Aはカウンタを歩進して「n=n+1」とし(ステップS6)、このnが4以上になったか否かを判定する(ステップS7)。この判定で、カウンタ値「4」未満の場合には各センサからの測定が終了していないために、ステップS3以降の処理を続行し、カウンタ値「4」に達した場合には、4個のセンサに対しての測定結果が算出されたものとして、次のステップS8に移る。
ステップS8では、CPU114AはRAM114Cに記憶された測定結果を制御部70に送信する。そして制御部70は記憶部60のINF60aに記憶されている最適温度情報を読み出し、CPU114Aからの情報を元にヒートロール51の各所が最適温度であるかを判断する。つまり、ワイヤレスセンサ110が検知した温度が最適温度よりも低い場合、CPU114AはスイッチSW1をONする(既にONの場合はONを維持)。逆にワイヤレスセンサ110が検知した温度が最適温度よりも高い場合、CPU114AはスイッチSW1をOFFする(既にOFFの場合はOFFを維持)。同じようにワイヤレスセンサ120、130および140が検知した温度についてもINF60aに記憶されている最適温度情報をもとに最適温度であるか否かを判断し、スイッチSW2、SW3およびSW4をON/OFFする。このような動作を行うことにより、例えば、幅の狭い用紙が連続してヒートロール51を通過した場合、紙が通過しないヒートロール51の領域の温度が最適温度よりも高くなった場合、スイッチSW1〜4をON/OFFすることにより、ヒートロール51全体を常に最適な温度に保つことができる。またワイヤレスセンサが検知した温度が異常であった場合、ユーザインタフェース装置50にその旨を表示する。
【0041】
以上説明したように本実施形態によれば、ヒートロール51に設置するセンサはワイヤレスセンサであるため、従来のセンサのようにケーブルを配設する必要がない。そのため、センサを配置する際、配置する場所を特定の場所にとどめることなく、自由に配置することができる。また、ケーブルの収納場所を設ける必要がないため、設計の自由度が上がる。さらに、検知制度を上げるために複数のセンサを配置しようとすると、従来の技術においては、センサを増やす毎にケーブルを配設しなくてはならなかったため、センサの追加はコストアップにつながっていたが、本発明においてはケーブルは不要であるため、コストを抑え検知制度を上げることができる。
【0042】
なお、本実施形態においては、ヒートロール51に設置したワイヤレスセンサは4つである場合を示したが、設置するワイヤレスセンサは4つに限らない。その場合、設置するワイヤレスセンサの数に応じて、形状の異なる櫛形電極3A、3B(図6参照)をワイヤレスセンサに設ける。
【図面の簡単な説明】
【0043】
【図1】本発明の実施形態に係る画像形成装置の構成を示す図である。
【図2】ヒートロールの正面図である。
【図3】ヒートロールの断面図である。
【図4】ヒートロールの電気回路図である。
【図5】画像形成装置の全体構成を示すブロック図である。
【図6】1対の櫛型電極を有したワイヤレスセンサの上面図と断面図である。
【図7】4対の櫛型電極を有したワイヤレスセンサの上面図である。
【図8】ワイヤレスセンサ、受信機および発信機の構成図である。
【図9】受信機のCPUが行う手順を示したフローチャートである。
【符号の説明】
【0044】
3A,3B・・・櫛形電極、4A,4B・・・アンテナ、5A,5B・・・インピーダンスマッチング部、6A,6B・・・グランド、111・・・発信機、112・・・受信機、110,120,130,140・・・ワイヤレスセンサ
【特許請求の範囲】
【請求項1】
記録用紙にトナー像を形成し、前記記録用紙に前記トナー像を定着させるために前記記録用紙を加熱するヒートロールを有する画像形成装置であって、
前記ヒートロールの内部に設けられた発熱源と、
前記ヒートロールの表面付近に設けられ、前記ヒートロールの表面付近の温度を電波信号に変えて送信するワイヤレスの温度測定手段と、
前記温度測定手段から出力される電波を受信し、この受信した電波信号に基づいて前記ヒートロールの温度を算出する受信手段と、
前記受信手段で算出された温度に基づき、前記発熱源の温度を制御する制御手段と
を備えたことを特徴とする画像形成装置。
【請求項2】
前記温度測定手段は、電波信号が供給されると、それをエネルギー源として前記ヒートロールの表面付近の温度を反映した属性と識別情報とを持った電波信号を生成して出力することを特徴とする請求項1記載の画像形成装置。
【請求項3】
前記温度測定手段は、
電波を受信して機械振動を発生させる励振部と、
前記励振部が発生した機械振動が伝達されて弾性表面波を発生するとともに、前記弾性表面波の属性が温度によって変化する振動媒体部と、
前記弾性表面波を電気信号に変換して電波信号として出力する送信部と
を備えたことを特徴とする請求項1または2記載の画像形成装置。
【請求項1】
記録用紙にトナー像を形成し、前記記録用紙に前記トナー像を定着させるために前記記録用紙を加熱するヒートロールを有する画像形成装置であって、
前記ヒートロールの内部に設けられた発熱源と、
前記ヒートロールの表面付近に設けられ、前記ヒートロールの表面付近の温度を電波信号に変えて送信するワイヤレスの温度測定手段と、
前記温度測定手段から出力される電波を受信し、この受信した電波信号に基づいて前記ヒートロールの温度を算出する受信手段と、
前記受信手段で算出された温度に基づき、前記発熱源の温度を制御する制御手段と
を備えたことを特徴とする画像形成装置。
【請求項2】
前記温度測定手段は、電波信号が供給されると、それをエネルギー源として前記ヒートロールの表面付近の温度を反映した属性と識別情報とを持った電波信号を生成して出力することを特徴とする請求項1記載の画像形成装置。
【請求項3】
前記温度測定手段は、
電波を受信して機械振動を発生させる励振部と、
前記励振部が発生した機械振動が伝達されて弾性表面波を発生するとともに、前記弾性表面波の属性が温度によって変化する振動媒体部と、
前記弾性表面波を電気信号に変換して電波信号として出力する送信部と
を備えたことを特徴とする請求項1または2記載の画像形成装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【公開番号】特開2006−259156(P2006−259156A)
【公開日】平成18年9月28日(2006.9.28)
【国際特許分類】
【出願番号】特願2005−75765(P2005−75765)
【出願日】平成17年3月16日(2005.3.16)
【出願人】(000005496)富士ゼロックス株式会社 (21,908)
【Fターム(参考)】
【公開日】平成18年9月28日(2006.9.28)
【国際特許分類】
【出願日】平成17年3月16日(2005.3.16)
【出願人】(000005496)富士ゼロックス株式会社 (21,908)
【Fターム(参考)】
[ Back to top ]