
画像形成装置
【課題】現時点からどの程度経過した時点で故障が発生するのかを予測することができる画像形成装置を提供する。
【解決手段】各種センサ2等によって取得された複数種類のデータからなる取得組データを所定のタイミングが到来する毎にハードディスクに順次記憶させ、多変量解析に用いる正常組データとして、それら複数種類のデータの他に、それらについてそれぞれ、取得時点よりも過去に所定の取得回数分だけ遡った時点から取得時点までの間における値の変動の傾きデータを含んでいるものをハードディスクに記憶させておき、各種センサ2等によって取得された最新の取得組データと、ハードディスクに記憶されている過去の取得組データとに基づいて、取得組データ内の複数種類のデータのそれぞれについて傾きデータを演算した後、演算結果と、最新の取得組データと、正常組データ群とに基づいて異常判定指標値を演算させるようにした。
【解決手段】各種センサ2等によって取得された複数種類のデータからなる取得組データを所定のタイミングが到来する毎にハードディスクに順次記憶させ、多変量解析に用いる正常組データとして、それら複数種類のデータの他に、それらについてそれぞれ、取得時点よりも過去に所定の取得回数分だけ遡った時点から取得時点までの間における値の変動の傾きデータを含んでいるものをハードディスクに記憶させておき、各種センサ2等によって取得された最新の取得組データと、ハードディスクに記憶されている過去の取得組データとに基づいて、取得組データ内の複数種類のデータのそれぞれについて傾きデータを演算した後、演算結果と、最新の取得組データと、正常組データ群とに基づいて異常判定指標値を演算させるようにした。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、複写機、ファクシミリ、プリンタ等の画像形成装置に係り、詳しくは、装置内の異常の有無を判定する手段の改良に関するものである。
【背景技術】
【0002】
従来、市場に出回っている様々な画像形成装置においては、故障が発生すると、その内容によっては部品を交換したり清掃したりするまで装置を使用することができず、ユーザーに不便を強いてしまうことがある。特に、電子写真方式の画像形成装置では、構成が比較的複雑で部品点数が多いことから、各種の部品のメンテナンスを定期的に行わないと、故障が突然に発生してしまうという事態に陥り易くなる。
【0003】
そこで、感光体や現像装置などといった装置内の各種部品や機器の累積稼働時間をカウンターによって順次カウントしていき、カウント値が所定の上限値に達した時点でその部品の交換時期の到来を報知する画像形成装置が知られている。かかる構成によれば、ユーザーや保守サービス機関に対して、部品や機器の交換を定期的に促すことができる。
【0004】
しかしながら、部品や機器の寿命の到来時期と、累積稼働時間とは完全な相関関係を示さないため、故障発生前のタイミングを確実に検出するためには、かなり余裕をもって上述の上限値を設定する必要がある。そして、これにより、実際には寿命到来までまだ十分に余裕があるにもかかわらず、部品や機器の交換を促してしまうという不具合が生じていた。
【0005】
一方、従来より、多変量解析によって被検対象の正常さ加減を量る種々の方法が知られている。例えば、非特許文献1に記載されたMTS(Maharanobis Taguchi System)法も、その1つである。MTS法では、まず、正常な状態の被検対象、あるいはこれと同一仕様のものから、複数種類のデータからなる正常組データを取得する。そして、この正常組データを数多く収集して正常組データ群を構築する。その後、被検対象の正常さ加減を調べたいときに、被検対象から正常組データと同様の種類のデータからなる取得組データを取得する。そして、の取得組データについて、予め構築しておいた正常組データ群による多次元空間内でどのような相対位置関係にあるのかを示す異常判定指標値たるマハラノビス距離を求め、その結果に基づいて被検対象の正常さ加減を量る。MTS法に限らず、例えば主成分分析法などといった他の多変量解析を用いても、正常組データ群と、取得組データとに基づいて被検対象の正常さ加減を量ることができる。
【0006】
このような多変量解析に基づいて、画像形成装置内における異常の有無を判定すれば、部品や機器の実際の劣化度合い応じた適切な交換時期を検出することができる。
【0007】
【非特許文献1】「MTシステムにおける技術開発」 刊行委員会委員長 田口玄一著 日本規格協会刊
【発明の開示】
【発明が解決しようとする課題】
【0008】
ところが、部品や機器の劣化の進行速度は、例えば部品間に異物が挟まっているなど、様々な要因によって変化する。多変量解析では、正常さ加減がある程度まで低下した時点、換言すると、部品や機器の劣化がある程度まで進行した時点を正確に検出することはできる。しかし、劣化の進行速度を把握することができないため、その後どれくらい経過すると故障発生が発生してしまうのかを予測することはできなかった。ユーザーにとっては、部品や機器の交換が促された時点から、交換なしでその後どれくらい装置を稼働させ得るのかという情報が非常に重要になる場合がある。特に、多量のプリントアウトを、ある時間帯に集中的に行ったり、休日や夜間にも行ったりするユーザーにとっては、部品等の交換が促されてから実際に交換するまでのタイミングを誤ると、故障が発生して業務に支障をきたすおそれが出てくる。
【0009】
本発明は、以上の背景に鑑みなされたものであり、その目的とするところは、次のような画像形成装置を提供することである。即ち、現時点からどの程度経過した時点で故障が発生するのかを予測することができる画像形成装置である。
【課題を解決するための手段】
【0010】
上記目的を達成するために、請求項1の発明は、記録部材に画像を形成する画像形成手段と、画像形成手段から複数種類のデータを取得するデータ取得手段と、互いに正常な値の該複数種類のデータを含む正常組データの集まりである正常組データ群を記憶するデータ記憶手段と、該データ取得手段によって取得された複数種類のデータからなる取得組データ、及び該データ記憶手段に記憶されている正常組データ群に基づいて異常判定指標値を演算する指標値演算手段とを備える画像形成装置において、上記データ取得手段によって取得された上記取得組データを所定のタイミングが到来する毎に上記データ記憶手段に順次記憶させていく記憶制御手段を設け、上記正常組データとして、上記複数種類のデータの他に、それらデータについてそれぞれ、取得時点よりも過去に所定の取得回数分だけ遡った時点から該取得時点までの間における値の変動の傾きデータを含んでいるものを上記データ記憶手段に記憶させ、且つ、上記データ取得手段によって取得された最新の上記取得組データと、上記データ記憶手段に記憶されている過去の上記取得組データとに基づいて、取得組データ内の上記複数種類のデータのそれぞれについて上記傾きデータを演算した後、この演算結果と、該最新の取得組データと、上記正常組データ群とに基づいて上記異常判定指標値を演算するように上記指標値演算手段を構成したことを特徴とするものである。
また、請求項2の発明は、請求項1の画像形成装置において、上記正常組データとして、上記複数種類のデータ及びこれらにそれぞれ個別に対応する複数の上記傾きデータの他に、該複数種類のデータについてそれぞれ、取得時点よりも過去に所定の取得回数分だけ遡った時点から該取得時点までの間における変動係数データを含んでいるものを上記データ記憶手段に記憶させ、且つ、上記データ取得手段によって取得された最新の上記取得組データと、上記データ記憶手段に記憶されている過去の上記取得組データとに基づいて、取得組データ内の上記複数種類のデータのそれぞれについて上記傾きデータ及び変動係数データを演算した後、演算結果と、該最新の取得組データと、上記正常組データ群とに基づいて上記異常判定指標値を演算するように上記指標値演算を構成したことを特徴とするものである。
また、請求項3の発明は、請求項1又は2の画像形成装置において、故障発生件数を計数する計数手段を設け、所定の第1期間中に上記データ取得手段によって取得された上記取得組データに基づいて上記正常組データ群を構築させ、その後の第2期間中に該データ取得手段によって取得された上記取得組データと、該計数手段によって計数された故障発生件数とに基づいて所定の係数を演算させ、且つ、その後の第3期間中に該データ取得手段によって取得された上記取得組データと、これに基づく上記傾きデータと、該正常組データ群とに基づいて演算した上記異常判定指標値に該所定の係数を乗ずることで、上記最新の取得組データを取得した時点から上記所定回数分のデータ取得を行う未来の時点までにおける故障の発生件数の予測値を求めさせるようにしたことを特徴とするものである。
また、請求項4の発明は、請求項1又は2の画像形成装置において、故障発生件数を計数する計数手段を設け、所定の第1期間中に上記データ取得手段によって取得された上記取得組データに基づいて上記正常組データ群を構築させるとともに、該取得組データと該計数手段によって計数された故障発生件数とに基づいて所定の係数を演算させ、且つ、その後の第2期間中に該データ取得手段によって取得された上記取得組データと、これに基づく上記傾きデータと、該正常組データ群とに基づいて演算した上記異常判定指標値に該所定の係数を乗ずることで、上記最新の取得組データを取得した時点から上記所定回数分のデータ取得を行う未来の時点までにおける故障の発生件数の予測値を求めさせるようにしたことを特徴とするものである。
また、請求項5の発明は、請求項3又は4の画像形成装置において、上記画像形成手段の1日あたりにおける平均稼働時間に基づいて、上記最新の取得組データを取得した時点から上記所定回数分のデータ取得を行う未来の時点までの期間を補正する補正手段を設けるとともに、上記発生件数を補正後の期間における故障の発生件数の予測値として報知するように報知手段を設けたことを特徴とするものである。
また、請求項6の発明は、請求項3又は4の画像形成装置において、上記画像形成手段の1日あたりにおける記録部材の平均出力数に基づいて、上記最新の取得組データを取得した時点から上記所定回数分のデータ取得を行う未来の時点までの期間を補正する補正手段を設けるとともに、上記発生件数を補正後の期間における故障の発生件数の予測値として報知する報知手段を設けたことを特徴とするものである。
【発明の効果】
【0011】
これらの発明においては、データ取得手段によって取得可能なセンシングデータなどといった各種のデータの他に、それらデータについてそれぞれ、取得時点よりも過去に所定の取得回数分だけ遡った時点から該取得時点までの間における値の変動の傾きデータを正常組データ群における各正常組データに含めている。そして、正常組データ群と対比するためのデータとして、データ取得手段によって取得した取得組データの他に、それに含まれる各種のデータについての同様の傾きデータを用いて、異常判定指標値を演算する。このようにして演算した異常判定指標値には、現時点の部材や機器における正常さ加減の変動の傾き、即ち、劣化の進行速度、を反映させている。このため、異常判定指標値の大きさは、単に画像形成手段の正常さ加減だけを示すものではなく、正常さ加減と、劣化の進行速度との両方を示すものとなる。そして、正常さ加減がある程度悪くなっていたとしても、劣化の進行速度が比較的遅ければ、異常判定指標値は正常値に近いものとなる。これに対し、正常さ加減がある程度良好であったとしても、劣化の進行速度がかなり速ければ、異常判定指標値は正常値からかけはなれたものになる。このような異常判定指標値は、所定の閾値に達することで被検対象について所定の劣化度合いに達したことを示していた従来の異常判定指標値とは異なり、その大きさにより、現時点からどの程度経過した時点で故障が発生するのかを示すようになる。よって、異常判定指標値の大きさに基づいて、現時点からどの程度経過した時点で故障が発生するのかを予測することができる。
【発明を実施するための最良の形態】
【0012】
以下、本発明を、画像形成装置である電子写真方式の複写機(以下、単に複写機という)に適用した一実施形態について説明する。
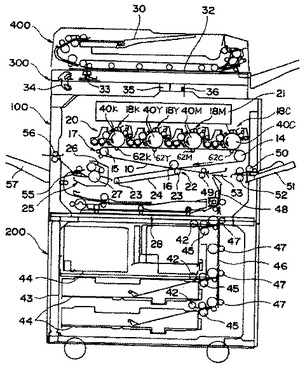
まず、本実施形態に係る複写機の基本的な構成について説明する。図1は、本複写機を示す概略構成図である。この複写機は、プリンタ部100と給紙部200とからなる画像形成手段と、スキャナ部300と、原稿搬送部400とを備えている。スキャナ部300はプリンタ部100上に取り付けられ、そのスキャナ部300の上に原稿自動搬送装置(ADF)からなる原稿搬送部400が取り付けられている。
【0013】
スキャナ部300は、コンタクトガラス32上に載置された原稿の画像情報を読取センサ36で読み取り、読み取った画像情報を図示しない制御部に送る。制御部は、スキャナ部300から受け取った画像情報に基づき、プリンタ部100の露光装置21内に配設された図示しないレーザやLED等を制御してドラム状の4つの感光体40K,Y,M,Cに向けてレーザ書き込み光Lを照射させる。この照射により、感光体40K,Y,M,Cの表面には静電潜像が形成され、この潜像は所定の現像プロセスを経由してトナー像に現像される。なお、符号の後に付されたK,Y,M,Cという添字は、ブラック,イエロー,マゼンタ,シアン用の仕様であることを示している。
【0014】
プリンタ部100は、露光装置21の他、1次転写ローラ62K,Y,M,C、2次転写装置22、定着装置25、排紙装置、図示しないトナー供給装置、トナー供給装置等も備えている。
【0015】
給紙部200は、プリンタ部100の下方に配設された自動給紙部と、プリンタ部100の側面に配設された手差し部とを有している。そして、自動給紙部は、ペーパーバンク43内に多段に配設された2つの給紙カセット44、給紙カセットから記録体たる転写紙を繰り出す給紙ローラ42、繰り出した転写紙を分離して給紙路46に送り出す分離ローラ45等を有している。また、プリンタ部100の給紙路48に転写紙を搬送する搬送ローラ47等も有している。一方、手差し部は、手差しトレイ51、手差しトレイ51上の転写紙を手差し給紙路53に向けて一枚ずつ分離する分離ローラ52等を有している。
【0016】
プリンタ部100の給紙路48の末端付近には、レジストローラ対49が配設されている。このレジストローラ対49は、給紙カセット44や手差しトレイ51から送られてくる転写紙を受け入れた後、所定のタイミングで中間転写体たる中間転写ベルト10と2次転写装置22との間に形成される2次転写ニップに送る。
【0017】
本複写機において、操作者は、カラー画像のコピーをとるときに、原稿搬送部400の原稿台30上に原稿をセットする。あるいは、原稿搬送部400を開いてスキャナ部300のコンタクトガラス32上に原稿をセットした後、原稿搬送部400を閉じて原稿を押さえる。そして、図示しないスタートスイッチを押す。すると、原稿搬送部400に原稿がセットされている場合には原稿がコンタクトガラス32上に搬送された後に、コンタクトガラス32上に原稿がセットされている場合には直ちに、スキャナ部300が駆動を開始する。そして、第1走行体33及び第2走行体34が走行し、第1走行体33の光源から発せられる光が原稿面で反射した後、第2走行体34に向かう。更に、第2走行体34のミラーで反射してから結像レンズ35を経由して読取りセンサ36に至り、画像情報として読み取られる。
【0018】
このようにして画像情報が読み取られると、プリンタ部100は、図示しない駆動モータで支持ローラ14、15、16の1つを回転駆動させながら他の2つの支持ローラを従動回転させる。そして、これらローラに張架される中間転写ベルト10を無端移動させる。更に、上述のようなレーザ書き込みや、後述する現像プロセスを実施する。そして、感光体40K,Y,M,Cを回転させながら、それらに、ブラック,イエロー,マゼンタ,シアンの単色画像を形成する。これらは、感光体40K,Y,M,Cと、中間転写ベルト10とが当接するK,Y,M,C用の1次転写ニップで順次重ね合わせて静電転写されて4色重ね合わせトナー像になる。感光体40K、40Y、40M、40C上にトナー像を形成する。
【0019】
一方、給紙部200は、画像情報に応じたサイズの転写紙を給紙すべく、3つの給紙ローラのうちの何れか1つを作動させて、転写紙をプリンタ部100の給紙路48に導く。給紙路48内に進入した転写紙は、レジストローラ対49に挟み込まれて一旦停止した後、タイミングを合わせて、中間転写ベルト10と2次転写装置22の2次転写ローラ23との当接部である2次転写ニップに送り込まれる。すると、2次転写ニップにおいて、中間転写ベルト10上の4色重ね合わせトナー像と、転写紙とが同期して密着する。そして、ニップに形成されている転写用電界やニップ圧などの影響によって4色重ね合わせトナー像が転写紙上に2次転写され、紙の白色と相まってフルカラー画像となる。
【0020】
2次転写ニップを通過した転写紙は、2次転写装置22の搬送ベルト24の無端移動によって定着装置25に送り込まれる。そして、定着装置25の加圧ローラ27による加圧力と、加熱ベルトによる加熱との作用によってフルカラー画像が定着せしめられた後、排出ローラ56を経てプリンタ部100の側面に設けられた排紙トレイ57上に排出される。
【0021】
図2は、プリンタ部100を示す拡大構成図である。プリンタ部100は、ベルトユニット、各色のトナー像を形成する4つのプロセスユニット18K,Y,M,C、2次転写装置22、ベルトクリーニング装置17、定着装置25等を備えている。
【0022】
ベルトユニットは、複数のローラに張架した中間転写ベルト10を、感光体40K,Y,M,Cに当接させながら無端移動させる。感光体40K,Y,M,Cと中間転写ベルト10とを当接させるK,Y,M,C用の1次転写ニップでは、1次転写ローラ62K,Y,M,Cによって中間転写ベルト10を裏面側から感光体40K,Y,M,Cに向けて押圧している。これら1次転写ローラ62K,Y,M,Cには、それぞれ図示しない電源によって1次転写バイアスが印加されている。これにより、K,Y,M,C用の1次転写ニップには、感光体40K,Y,M,C上のトナー像を中間転写ベルト10に向けて静電移動させる1次転写電界が形成されている。各1次転写ローラ62K,Y,M,Cの間には、中間転写ベルト10の裏面に接触する導電性ローラ74がそれぞれ配設されている。これら導電性ローラ74は、1次転写ローラ62K,Y,M,Cに印加される1次転写バイアスが、中間転写ベルト10の裏面側にある中抵抗の基層11を介して隣接するプロセスユニットに流れ込むことを阻止するものである。
【0023】
プロセスユニット(18K,Y,M,C)は、感光体(40K,Y,M,C)と、その他の幾つかの装置とを1つのユニットとして共通の支持体に支持するものであり、プリンタ部100に対して着脱可能になっている。ブラック用のプロセスユニット18Kを例にすると、これは、感光体40Kの他、感光体40K表面に形成された静電潜像をブラックトナー像に現像するための現像手段たる現像ユニット61Kを有している。また、1次転写ニップを通過した後の感光体40K表面に付着している転写残トナーをクリーニングする感光体クリーニング装置63Kも有している。また、クリーニング後の感光体40K表面を除電する図示しない除電装置や、除電後の感光体40K表面を一様帯電せしめる図示しない帯電装置なども有している。他色用のプロセスユニット18Y,M,Cも、取り扱うトナーの色が異なる他は、ほぼ同様の構成になっている。本複写機では、これら4つのプロセスユニット18K,Y,M,Cを、中間転写ベルト10に対してその無端移動方向に沿って並べるように対向配設したいわゆるタンデム型の構成になっている。
【0024】
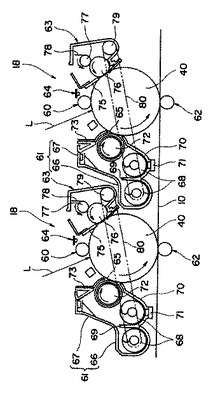
図3は、4つのプロセスユニット18K,Y,M,Cからなるタンデム部20の一部を示す部分拡大図である。なお、4つのプロセスユニット18K,Y,M,Cは、それぞれ使用するトナーの色が異なる他はほぼ同様の構成になっているので、同図においては各符号に付すK,Y,M,Cという添字を省略している。同図に示すように、プロセスユニット18は、感光体40の周りに、帯電手段としての帯電装置60、現像装置61、1次転写手段としての1次転写ローラ62、感光体クリーニング装置63、除電装置64等を備えている。
【0025】
感光体40としては、アルミニウム等の素管に、感光性を有する有機感光材を塗布し、感光層を形成したドラム状のものを用いている。但し、無端ベルト状のものを用いても良い。また、帯電装置60としては、帯電バイアスが印加される帯電ローラを感光体40に当接させながら回転させるものを用いている。感光体40に対して非接触で帯電処理を行うスコロトロンチャージャ等を用いてもよい。
【0026】
現像装置61は、磁性キャリアと非磁性トナーとを含有する二成分現像剤を用いて潜像を現像するようになっている。内部に収容している二成分現像剤を攪拌しながら搬送して現像スリーブ65に供給する攪拌部66と、現像スリーブ65に付着した二成分現像剤のうちのトナーを感光体4K,Y,M,Cに転移させる現像部67とを有している。
【0027】
攪拌部66は、現像部67よりも低い位置に設けられており、互いに平行配設された2本のスクリュウ68、これらスクリュウ間に設けられた仕切り板、現像ケース70の底面に設けられたトナー濃度センサ71などを有している。
【0028】
現像部67は、現像ケース70の開口を通して感光体40に対向する現像スリーブ65、これの内部に回転不能に設けられたマグネットローラ72、現像スリーブ65に先端を接近させるドクタブレード73などを有している。ドクタブレード73と現像スリーブ65との間の最接近部における間隔は500[μm]程度に設定されている。現像スリーブ65は、非磁性の回転可能なスリーブ状の形状になっている。また、現像スリーブ65に連れ回らないようにないようされるマグネットローラ72は、例えば、ドクタブレード73の箇所から現像スリーブ65の回転方向にN1、S1、N2、S2、S3の5磁極を有している。これら磁極は、それぞれスリーブ上の二成分現像剤に対して回転方向の所定位置で磁力を作用させる。これにより、攪拌部66から送られてくる二成分現像剤を現像スリーブ65表面に引き寄せて担持させるとともに、スリーブ表面上で磁力線に沿った磁気ブラシを形成する。
【0029】
磁気ブラシは、現像スリーブ65の回転に伴ってドクタブレード73との対向位置を通過する際に適正な層厚に規制されてから、感光体40に対向する現像領域に搬送される。そして、現像スリーブ65に印加される現像バイアスと、感光体40の静電潜像との電位差によって静電潜像上に転移して現像に寄与する。更に、現像スリーブ65の回転に伴って再び現像部67内に戻り、マグネットローラ72の磁極間の反発磁界の影響によってスリーブ表面から離脱した後、攪拌部66に戻される。攪拌部66内では、トナー濃度センサ71による検知結果に基づいて、二成分現像剤に適量のトナーが補給される。なお、現像装置61として、二成分現像剤を用いるものの代わりに、磁性キャリアを含まない一成分現像剤を用いるものを採用してもよい。
【0030】
感光体クリーニング装置63としては、ポリウレタンゴム製のクリーニングブレード75を感光体40に押し当てる方式のものを用いているが、他の方式のものを用いてもよい。クリーニング性を高める目的で、本例では、外周面を感光体40に接触させる接触導電性のファーブラシ76を、図中矢印方向に回転自在に有するクリーニング装置63を採用している。そして、ファーブラシ76にバイアスを印加する金属製電界ローラ77を図中矢示方向に回転自在に設け、その電界ローラ77にスクレーパ78の先端を押し当てている。スクレーパ78によって電界ローラ77から除去されたトナーは、回収スクリュ79上に落下して回収される。
【0031】
かかる構成の感光体クリーニング装置63は、感光体40に対してカウンタ方向に回転するファーブラシ76で、感光体40上の残留トナーを除去する。ファーブラシ76に付着したトナーは、ファーブラシ76に対してカウンタ方向に接触して回転するバイアスを印加された電界ローラ77に取り除かれる。電界ローラ77に付着したトナーは、スクレーパ78でクリーニングされる。感光体クリーニング装置63で回収したトナーは、回収スクリュ79で感光体クリーニング装置63の片側に寄せられ、トナーリサイクル装置80で現像装置61へと戻されて再利用される。
【0032】
除電装置64は、除電ランプ等からなり、光を照射して感光体40の表面電位を除去する。このようにして除電された感光体40の表面は、帯電装置60によって一様帯電せしめられた後、光書込処理がなされる。
【0033】
ベルトユニットの図中下方には、2次転写装置22が設けられている。この2次転写装置22は、2つのローラ23間に、2次転写ベルト24を掛け渡して無端移動させている。2つのローラ23のうち、一方は図示しない電源によって2次転写バイアスが印加される2次転写ローラとなっており、ベルトユニットのローラ16との間に中間転写ベルト10と2次転写ベルト24とを挟み込んでいる。これにより、両ベルトが当接しながら当接部で互いに同方向に移動する2次転写ニップが形成されている。レジストローラ対49からこの2次転写ニップに送り込まれた転写紙には、中間転写ベルト10上の4色重ね合わせトナー像が2次転写電界やニップ圧の影響で一括2次転写されて、フルカラー画像が形成される。2次転写ニップを通過した転写紙は、中間転写ベルト10から離間して、2次転写ベルト24の表面に保持されながら、ベルトの無端移動に伴って定着装置25へと搬送される。なお、2次転写ローラに代えて、転写チャージャ等によって2次転写を行わせるようにしてもよい。
【0034】
2次転写ニップを通過した中間転写ベルト10の表面は、支持ローラ15による支持位置にさしかかる。ここでは、中間転写ベルト10が、おもて面(ループ外面)に当接するベルトクリーニング装置17と、裏面に当接する支持ローラ15との間に挟み込まれる。そして、ベルトクリーニング装置17により、おもて面に付着している転写残トナーが除去された後、K,Y,M,C用の1次転写ニップに順次進入して、次の4色トナー像が重ね合わされる。
【0035】
ベルトクリーニング装置17は、2つのファーブラシ90,91を有している。これらは、複数の起毛をその植毛方向に対してカウンタ方向で中間転写ベルト10に当接させながら回転することで、ベルト上の転写残トナーを機械的に掻き取る。加えて、図示しない電源によってクリーニングバイアスが印加されることで、掻き取った転写残トナーを静電的に引き寄せて回収する。
【0036】
ファーブラシ90,91に対しては、それぞれ金属ローラ92,93が接触しながら、順または逆方向に回転している。これら金属ローラ92,93のうち、中間転写ベルト10の回転方向上流側に位置する金属ローラ92には、電源94によってマイナス極性の電圧が印加されている。また、下流側に位置する金属ローラ93には、電源95によってプラス極性の電圧が印加される。そして、それらの金属ローラ92,93には、それぞれブレード96,97の先端が当接している。かかる構成では、中間転写ベルト10の図中矢印方向への無端移動に伴って、まず、上流側のファーブラシ90が中間転写ベルト10表面をクリーニングする。このとき、例えば金属ローラ92に−700[V]が印加されながら、ファーブラシ90に−400[V]が印加されると、まず、中間転写ベルト10上のプラス極性のトナーがファーブラシ90側に静電転移する。そして、ファーブラシ側に転移したトナーが更に電位差によってファーブラシ90から金属ローラ92に転移して、ブレード96によって掻き落とされる。
【0037】
このように、ファーブラシ90で中間転写ベルト10上のトナーが除去されるが、中間転写ベルト10上にはまだ多くのトナーが残っている。それらのトナーは、ファーブラシ90に印加されるマイナス極性のバイアスにより、マイナスに帯電される。これは、電荷注入または放電により帯電されるものと考えられる。次いで下流側のファーブラシ91を用いて今度はプラス極性のバイアスを印加してクリーニングを行うことにより、それらのトナーを除去することができる。除去したトナーは、電位差によりファーブラシ91から金属ローラ93に転移させ、ブレード97により掻き落とす。ブレード96、97で掻き落としたトナーは、不図示のタンクに回収される。
【0038】
ファーブラシ91でクリーニングされた後の中間転写ベルト10表面は、ほとんどのトナーが除去されているがまだ少しのトナーが残っている。これらの中間転写ベルト10上に残ったトナーは、上述したようにファーブラシ91に印加されるプラス極性のバイアスにより、プラス極性に帯電される。そして、1次転写位置で印加される転写電界によって感光体40K,Y,M,C側に転写され、感光体クリーニング装置63で回収される。
【0039】
レジストローラ対49は一般的には接地されて使用されることが多いが、転写紙Pの紙粉除去のためにバイアスを印加することも可能である。
【0040】
2次転写装置22および定着装置25の下には、上述したタンデム部20と平行に延びるような、転写紙反転装置28(図1参照)が設けられている。これにより、片面に対する画像定着処理を終えた転写紙が、切換爪で転写紙の進路を転写紙反転装置側に切り換えられ、そこで反転されて再び2次転写転写ニップに進入する。そして、もう片面にも画像の2次転写処理と定着処理とが施された後、排紙トレイ上に排紙される。
【0041】
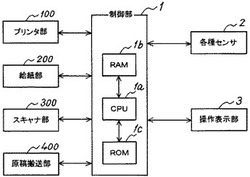
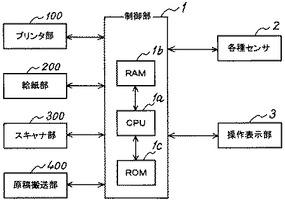
本複写機は、その構成要素の状態や内部で生ずる現象に関連する様々な情報を取得するデータ取得手段を備えている。このデータ取得手段は、図4に示される制御部1、各種センサ2、操作表示部3などから構成されている。制御部1は、複写機全体の制御を司る制御手段であり、制御プログラムを記憶しているデータ記憶手段たるROM1c、演算データや制御パラメータ等を記憶するデータ記憶手段たるRAM1b、CPU1a等を有している。また、データ記憶手段たる図示しないハードディスクも有している。操作表示部3は、文字情報等を表示する液晶ディスプレイ等から構成される表示部3aや、テンキー等などによって操作者から入力データを受け付けて制御部1cに送る操作部3bなどを有している。本複写機では、これら制御部1、各種センサ2、操作表示部3等からなるデータ取得手段が、ROM(1c)等のデータ記憶手段に記憶された正常組データ群と、複写機から定期的に取得した取得組データとに基づいて後述する異常判定指標値を演算する指標値演算手段としても機能している。また、データ取得手段によって取得された取得組データを所定のタイミングが到来する毎にデータ記憶手段たるハードディスクに順次記憶させていく記憶制御手段としても機能している。
【0042】
本複写機のデータ取得手段によって取得される各種のデータとしては、センシングデータ、制御パラメータデータ、入力データ、画像読取データなどが挙げられる。以下、これらのデータについて詳述する。
【0043】
(a)センシングデータ
センシングデータとしては、駆動関係、記録媒体の各種特性、現像剤特性、感光体特性、電子写真の各種プロセス状態、環境条件、記録物の各種特性などが取得する対象として考えられる。これらのセンシングデータの概要を説明すると、以下のようになる。
【0044】
(a-1)駆動系統のデータ
・感光体ドラムの回転速度をエンコーダーで検出したり、駆動モータの電流値を読み取ったり、駆動モータの温度を読み取る。
・同様にして、定着ローラ、紙搬送ローラ、駆動ローラなどの円筒状またはベルト状の回転する部品の駆動状態を検出する。
・駆動により発生する音を装置内部または外部に設置されたマイクロフォンで検出する。
【0045】
(a-2)紙搬送の状態
・透過型または反射型の光センサ、あるいは接触タイプのセンサにより、搬送された紙の先端や後端の位置を読み取り、紙詰まりが発生したことを検出したり、紙の先端や後端の通過タイミングのずれ、送り方向と垂直な方向の変動などを読み取る。
・同様に、複数のセンサ間の検出タイミングにより、紙の移動速度を求める。
・給紙時の給紙ローラと紙とのスリップを、ローラの回転数計測値と紙の移動量との比較で求める。
【0046】
(a-3)紙などの記録媒体の各種特性
このデータは、画質やシート搬送の安定性に大きく影響する。この紙種のデータ取得には以下のような方法がある。
・紙の厚みは、紙を二つのローラで挟み、ローラの相対的な位置変位を光学センサ等で検知したり、紙が進入してくることによって押し上げられる部材の移動量と同等の変位量を検知することによって求める。
・紙の表面粗さは、転写前の紙の表面にガイド等を接触させ、その接触によって生じる振動や摺動音等を検知する。
・紙の光沢は、規定された入射角で規定の開き角の光束を入射し、鏡面反射方向に反射する規定の開き角の光束をセンサで測定する。
・紙の剛性は、押圧された紙の変形量(湾曲量)を検知することにより求める。
・再生紙か否かの判断は、紙に紫外線を照射してその透過率を検出して行なう。
・裏紙か否かの判断は、LEDアレイ等の線状光源から光を照射し、転写面から反射した光をCCD等の固体撮像素子で検出して行なう。
・OHP用のシートか否かは、用紙に光を照射し、透過光と角度の異なる正反射光を検出して判断する。
・紙に含まれている水分量は、赤外線またはμ波の光の九州を測定することにより求める。
・カール量は光センサ、接触センサなどで検出する。
・紙の電気抵抗は、一対の電極(給紙ローラなど)を記録紙と接触させて直接測定したり、紙転写後の感光体や中間転写体の表面電位を測定して、その値から記録紙の抵抗値を推定する。
【0047】
(a-4)現像剤特性
現像剤(トナーやキャリア)の装置内での特性は、電子写真プロセスの機能の根幹に影響するものである。そのため、システムの動作や出力にとって重要な因子となる。現像剤の情報を得ることは極めて重要である。この現像剤特性としては、例えば次のような項目が挙げられる。
・トナーについては、帯電量およびその分布、流動性、凝集度、嵩密度、電気抵抗、外添剤量、消費量または残量、流動性、トナー濃度(トナーとキャリアの混合比)を挙げることができる。
・キャリアについては、磁気特性、コート膜厚、スペント量などを挙げることができる。
これらのデータを複写機の中において単独で検出することは通常困難である。そこで、現像剤の総合的な特性として検出すると良い。この現像剤の総合的な特性は、例えば次のように測定することができる。
・感光体上にテスト用潜像を形成し、予め決められた現像条件で現像して、形成されたトナー像の反射濃度(光反射率)を測定する。
・現像装置中に一対の電極を設け、印加電圧と電流の関係を測定する(抵抗、誘電率など)。
・現像装置中にコイルを設け、電圧電流特性を測定する(インダクタンス)。
・現像装置中にレベルセンサを設けて、現像剤容量を検出する。レベルセンサは光学式、静電容量式などがある。
【0048】
(a-5)感光体特性
感光体特性も現像剤特性と同じく、電子写真プロセスの機能と密接に関わる。この感光体特性のデータとしては、感光体の膜厚、表面特性(摩擦係数、凹凸)、表面電位(各プロセス前後)、表面エネルギー、散乱光、温度、色、表面位置(フレ)、線速度、電位減衰速度、電気抵抗、静電容量、表面水分量などが挙げられる。このうち、複写機の中では、次のようなデータを検出できる。
・膜厚変化に伴う静電容量の変化を、帯電部材から感光体に流れる電流を検知し、同時に帯電部材への印加電圧と予め設定された感光体の誘電厚みに対する電圧電流特性と照合することにより、膜厚を求める。
・表面電位、温度は従来周知のセンサで求めることができる。
・線速度は感光体回転軸に取り付けられたエンコーダーなどで検出される。
・感光体表面からの散乱光は光センサで検出される。
【0049】
(a-6)電子写真プロセス状態
電子写真方式によるトナー像形成は、周知のように、感光体の均一帯電、レーザー光などによる潜像形成(像露光)、電荷を持ったトナー(着色粒子)による現像、転写材へのトナー像の転写(カラーの場合は中間転写体または最終転写材である記録媒体での重ね合わせ、または現像時に感光体への重ね現像を行なう)、記録媒体へのトナー像の定着という順序で行なわれる。これらの各段階での様々な情報は、画像その他のシステムの出力に大きく影響を与える。これらを取得することがシステムの安定を評価する上で重要となる。この電子写真プロセス状態のデータ取得の具体例としては、次のようなものが挙げられる。
・帯電電位、露光部電位は従来公知の表面電位センサにより検出される。
・非接触帯電における帯電部材と感光体とのギャップは、ギャップを通過させた光の量を測定することにより検知する。
・帯電による電磁波は広帯域アンテナにより捉える。
・帯電による発生音。
・露光強度。
・露光光波長。
【0050】
また、トナー像の様々な状態を取得すること方法としては、次のようなものが挙げられる。
・パイルハイト(トナー像の高さ)を、変位センサで縦方向から奥行きを、平行光のリニアセンサで横方向から遮光長を計測して求める。
・トナー帯電量を、ベタ部の静電潜像の電位、その潜像が現像された状態での電位を測定する電位センサにより測定し、同じ箇所の反射濃度センサから換算した付着量との比により求める。
・ドット揺らぎまたはチリを、ドットパターン画像を感光体上においては赤外光のエリアセンサ、中間転写体上においては各色に応じた波長のエリアセンサで検知し、適当な処理をすることにより求める。
・オフセット量(定着後)を、記録紙上と定着ローラ上の対応する場所をそれぞれ光学センサで読み取って、両者比較することにより求める。
・転写工程後(PD上,ベルト上)に光学センサを設置し,特定パターンの転写後の転写残パターンからの反射光量で転写残量を判断する。
・重ね合わせ時の色ムラを定着後の記録紙上を検知するフルカラーセンサで検知する。
【0051】
(a-7)形成されたトナー像の特性
・画像濃度、色は光学的に検知する。反射光、透過光のいずれでもよい。色に応じて投光波長を選択すればよい。濃度及び単色情報を得るには感光体上または中間転写体上でよいが、色ムラなど,色のコンビネーションを測るには紙上の必要がある。
・階調性は、階調レベルごとに感光体上に形成されたトナー像または転写体に転写されたトナー像の反射濃度を光学センサにより検出する。
・鮮鋭性は、スポット径の小さい単眼センサ、若しくは高解像度のラインセンサを用いて、ライン繰り返しパターンを現像または転写した画像を読み取ることにより求める。
・粒状性(ざらつき感)は、鮮鋭性の検出と同じ方法により、ハーフトーン画像を読み取り、ノイズ成分を算出することにより求める。
・レジストスキューは、レジスト後の主走査方向両端に光学センサを設け、レジストローラONタイミングと両センサの検知タイミングとの差異から求める。
・色ずれは、中間転写体または記録紙上の重ね合わせ画像のエッジ部を、単眼の小径スポットセンサ若しくは高解像度ラインセンサで検知する。
・バンディング(送り方向の濃度むら)は、記録紙上で小径スポットセンサ若しくは高解像度ラインセンサにより副走査方向の濃度ムラを測定し、特定周波数の信号量を計測する。
・光沢度(むら)は、均一画像が形成された記録紙を正反射式光学センサで検知するように設ける。
・かぶりは、感光体上、中間転写体上、または記録紙上において、比較的広範囲の領域を検知する光学センサで画像背景部を読み取る方法、または高解像度のエリアセンサで背景部のエリアごと画像情報を取得し、その画像に含まれるトナー粒子数を数えるという方法がある。
【0052】
(a-8)画像形成装置のプリント物の物理的な特性
・像流れや画像かすれなどは、感光体上、中間転写体、あるいは記録紙上でトナー像をエリアセンサにより検知し、取得した画像情報を画像処理して判定する。
・トナーチリ汚れは記録紙上の画像を高解像度ラインセンサまたはエリアセンサで取り込み、パターン部の周辺に散っているトナー量を算定することにより求める。
・後端白抜け、ベタクロス白抜けは、感光体上、中間転写体、あるいは記録紙上で高解像度ラインセンサにより検知する。
・記録紙のカール、波打ち、折れは、変位センサで検出する。折れの検出のためには記録紙の両端部分に近い所にセンサを設置することが有効である。
・コバ面の汚れやキズは、排紙トレイに縦に設けたエリアセンサにより,ある程度排紙が溜まった時のコバ面をエリアセンサで撮影,解析する。
【0053】
(a-9)環境状態
・温度検出には、異種金属どうし或いは金属と半導体どうしを接合した接点に発生する熱起電力を信号として取り出す熱電対方式、金属或いは半導体の抵抗率が温度によって変化することを利用した抵抗率変化素子、また、或る種の結晶では温度が上昇したことにより結晶内の電荷の配置に偏りが生じ表面に電位発生する焦電型素子、更には、温度による磁気特性の変化を検出する熱磁気効果素子などを採用することができる。
・湿度検出には、H2O或いはOH基の光吸収を測定する光学的測定法、水蒸気の吸着による材料の電気抵抗値変化を測定する湿度センサ等がある。
・各種ガスは、基本的にはガスの吸着に伴う、酸化物半導体の電気抵抗の変化を測定することにより検出する。
・気流(方向、流速、ガス種)の検出には、光学的測定法等があるが、システムへの搭載を考慮するとより小型にできるエアブリッジ型フローセンサが特に有用である。
・気圧、圧力の検出には、感圧材料を使用する、メンブレンの機械的変位を測定する等の方法がある。振動の検出にも同様に方法が用いられる。
【0054】
(b)制御パラメータデータ
複写機の動作は制御部によって決定されるため、制御部の入出力パラメータを直接利用することが有効である。
【0055】
(b-1)画像形成パラメータ
画像形成のために制御部が演算処理により出力する直接的なパラメータで、以下のような例がある。
・制御部によるプロセス条件の設定値で、例えば帯電電位、現像バイアス値、定着温度設定値など。
・同じく、中間調処理やカラー補正などの各種画像処理パラメータの設定値。
・制御部が装置の動作のために設定する各種のパラメータで、例えば紙搬送のタイミング、画像形成前の準備モードの実行時間など。
【0056】
(b-2)ユーザー操作履歴
・色数、枚数、画質指示など、ユーザーにより選択された各種操作の頻度
・ユーザーが選択した用紙サイズの頻度。
【0057】
(b-3)消費電力
・全期間または特定期間単位(1日、1週間、1ヶ月など)の総合消費電力あるいはその分布、変化量(微分)、累積値(積分)など。
【0058】
(b-4)消耗品消費情報
・全期間または特定期間単位(1日、1週間、1ヶ月など)のトナー、感光体、紙の使用量あるいはその分布、変化量(微分)、累積値(積分)など。
【0059】
(b-5)故障発生情報
・全期間または特定期間単位(1日、1週間、1ヶ月など)の故障発生(種類別)の頻度あるいはその分布、変化量(微分)、累積値(積分)など。
(b-6)動作時間情報(作動時間情報)
・複写機の動作時間を計時手段によって計時して記憶する。
(b-7)プリント動作回数(作動回数情報)
・プリントアウト1枚ごとにカウントアップしていき、そのカウント値を記憶する。
【0060】
(c)入力画像情報
ホストコンピュータから直接データとして送られる画像情報、あるいは原稿画像からスキャナーで読み取って画像処理をした後に得られる画像情報から、以下のような情報を取得することができる。
・着色画素累積数はGRB信号別の画像データを画素ごとにカウントすることにより求められる。
・例えば特許第2621879号の公報に記載されているような方法でオリジナル画像を文字、網点、写真、背景に分離し、文字部、ハーフトーン部などの比率を求めることができる。同様にして色文字の比率も求めることができる。
・着色画素の累積値を主走査方向で区切った領域別にカウントすることにより、主走査方向のトナー消費分布が求められる。
・画像サイズは制御部が発生する画像サイズ信号または画像データでの着色画素の分布により求められる。
・文字の種類(大きさ、フォント)は文字の属性データから求められる。
【0061】
次に、本複写機における各種データの具体的取得法について説明する。
(1)温度データ
本複写機は、温度の情報を取得する温度センサとして、原理及び構造が簡単でしかも超小型にできる抵抗変化素子を用いるものを備えている。
【0062】
(2)湿度データ
小型にできる湿度センサが有用である。基本原理は感湿性セラミックスに水蒸気が吸着すると、吸着水によりイオン伝導が増加しセラミックスの電気抵抗が低下することによる。感湿性セラミックスの材料は多孔質材料であり、一般的にはアルミナ系、アパタイト系、ZrO2−MgO系などが使用される。
【0063】
(3)振動データ
振動センサは、基本的には気圧及び圧力を測定するセンサと同じであり、システムへの搭載を考慮すると超小型にできるシリコン利用のセンサが特に有用である。薄いシリコンのダイアフラム上に作製した振動子の運動を、振動子と対向して設けられた対向電極間との容量変化を計測する、或いはSiダイアフラム自体のピエゾ抵抗効果を利用して計測することができる。
【0064】
(4)トナー濃度(4色分)データ
各色ごとにトナー濃度を検出してデータ化する。トナー濃度センサとしては従来より公知の方式のものを用いることができる。例えば、特開平6−289717号公報に記載されているような現像装置中の現像剤の透磁率の変化を測定するセンシングシステムにより、トナー濃度を検出することができる。
【0065】
(5)感光体一様帯電電位(4色分)データ
各色用の感光体(40K,Y,M,C)について、それぞれ一様帯電電位を検出する。物体の表面電位を検知する公知の表面電位センサを用いることができる。
【0066】
(6)感光体露光後電位(4色分)データ
光書込後の感光体(40K,Y,M,C)の表面電位を、(5)と同様にして検出する。
【0067】
(7)着色面積率(4色分)データ
入力画像情報から、着色しようとする画素の累計値と全画素の累計値の比から着色面積率を色ごとに求め、これを利用する。
【0068】
(8)現像トナー量(4色分)データ
感光体(40K,Y,M,C)上で現像された各色トナー像における単位面積あたりのトナー付着量を、反射型フォトセンサによる光反射率に基づいて求める。反射型フォトセンサは対象物にLED光を照射し、反射光を受光素子で検出するものである。トナー付着量と光反射率とには相関関係が成立するため、光反射率に基づいてトナー付着量を求めることができる。
【0069】
(9)紙先端位置の傾き
給紙部(200)の給紙ローラから2次転写ニップに至る給紙経路のどこかに、転写紙をその搬送方向に直交する方向の両端で検知する光センサ対を設置し、搬送されてくる転写紙の先端付近の両端を検出する。両光センサについて、給紙ローラの駆動信号の発信時を基準として、通過までの時間を計測し、時間のズレに基づいて送り方向に対する転写紙の傾きを求める。
【0070】
(10)排紙タイミングデータ
排出ローラ対(図1の56)を通過後の転写紙を光センサで検出する。この場合も給紙ローラの駆動信号の発信時を基準として計測する。
【0071】
(11)感光体総電流(4色分)データ
感光体(40K,Y,M,C)からアースに流れ出る電流を検出する。感光体の基板と接地端子との間に、電流測定手段を設けることで、かかる電流を検出することができる。
【0072】
(12)感光体駆動電力(4色分)
感光体の駆動源(モータ)が駆動中に費やす駆動電力(電流×電圧)を電流計や電圧計などによって検出する。
【0073】
次に、本複写機の特徴的な構成について説明する。
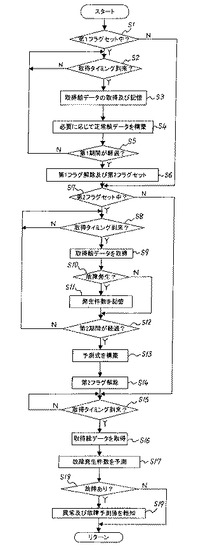
図5は、本複写機の制御部1によって、比較的長期間に渡って実施される長期制御における処理フローを示すフローチャートである。本複写機の制御部1は、工場から出荷された後、ユーザーのもとで使用され初めてから、所定の第1期間が経過するまでの間に、定期的に取得した上述の取得組データに基づいて正常組データ群を構築する。具体的には、本複写機は、制御パラメータである第1フラグがセットされた状態で工場から出荷される。制御部1は、この第1フラグについてセット中であるか否かを判断し、セット中である場合には(ステップ1:以下、ステップをSと記す)、次に、定期的に到来する取得タイミングの到来の有無を監視する(S2)。そして、取得タイミングが到来した場合には(S2でY)、各種センサからの出力信号などに基づいて取得組データを取得して、取得タイミングと関連付けてハードディスク内に記憶させる(S3)。次いで、必要に応じて取得組データに基づいて正常組データを構築してハードディスク内に記憶させる(S4)。これらの処理を、第1期間が経過するまで繰り返し行うことで、複数の正常組データからなる正常組データ群を構築する。第1期間が経過すると(S5でY)、第1フラグが解除されるとともに、第2フラグがセットされる(S6)。
【0074】
このようにして正常組データ群の構築が終了すると、以降は、制御フローのS1からS6までが省略されて、後述するS7以降の制御フローが実行される。そして、所定の第2期間が経過するまでの間に、故障の発生件数を予測する予測式を構築するための予測式構築用データ取得が行われる。具体的には、制御部1は、まず、第2フラグについてセット中であるか否かを判断し、セット中である場合には(S7でY)、取得タイミングの到来の有無を監視する(S8)。そして、取得タイミングが到来すると(S8でY)、取得組データを取得してハードディスク内に記憶させた後(S9)、故障の発生の有無を判断する(S10)。故障の発生があった場合には(S10でY)、発生件数を取得タイミングと関連づけてハードディスク内に記憶させる(S11)。同時に2以上の故障が発生することは少ないので、通常は発生件数「1」が取得タイミングに関連付けられて記憶されるが、「2」以上になる場合もある。また、故障の発生の有無については、センサ等によって検出可能な故障であれば制御部1が自動で検出して発生件数をハードディスク内に記憶させる。また、検出不能な故障については、ユーザーやサービスマンによる操作表示部3への入力操作に基づいて制御部1が検出して発生件数をハードディスク内に記憶させる。これらの処理を、第2期間が経過するまで繰り返し行うことで、予測式構築用のデータを取得していく。第2期間が経過すると(S12でY)、ハードディスク内に記憶されている正常組データ群と予測式構築用のデータとに基づいて予測式が構築された後(S13)、第2フラグが解除されるる(S14)。
【0075】
このようにして予測式の構築が終了すると、以降は、制御フローのS1からS14までが省略されて、後述するS15以降の制御フローが実行される。そして、以降の期間において、故障発生件数の予測が行われる。具体的には、制御部1は、取得タイミングの到来の有無を監視し(S15)、到来した場合には(S15でY)、取得組データを取得した後(S16)、現時点から所定期間が経過するまでの故障発生件数を予測式等に基づいて求める(S17)。そして、故障発生件数の予測値が「1」異常であった場合には(S18でY)、故障予測値(故障発生件数の予測値)を報知する(S19)。この報知は、操作表示部3への表示によって行われる。なお、故障発生件数の予測値にかかわらず、予測値を報知させるようにしてもよい。
【0076】
次に、上述の第1期間中における正常組データ群の構築処理について詳述する。本複写機では、例えば次の表1に示す33種類のデータからなる取得組データを、例えばp枚プリントアウト毎に(取得タイミング到来)取得する。
【表1】

【0077】
以下、この表1における種類番号を変数「j」として表して説明する。また、データをxで表し、これにjを添字として付すことで、どの種類のデータなのかを表す。たとえば、xj=1であれば、これは温度データを表すことになる。なお、pの値が小さすぎると多くのデータ記憶容量や処理時間が必要になる。また、大きすぎると取得データ数の不足による予測精度の低下が起こる。このため、pの値については、それらを勘案して適宜設定することが望ましい。
【0078】
また、本複写機の制御部1は、詳細は後述するが、必要に応じて、取得組データを取得した時点よりも所定の取得回数分だけ過去に遡ったり、所定の取得回数分だけ時間経過した未来を仮定したりして、各種の演算処理を行うようになっている。以下、取得組データの取得時点をα(α回目の取得組データの取得)で表し、且つ、前述の所定の取得回数をステップqとして説明する。
【0079】
制御部1は、本複写機がユーザーに使用され始めた時点から、初めにp枚目のプリントアウトがなされた時点で、第1番目の取得組データ(xj=1〜33)を取得する。以降、第1番目から(q−1)番目の取得組データを取得するまでは、図5におけるS4の工程を省略する。そして、第q番目の取得組データを取得した以降は、図5におけるS4の工程を実施する。この工程では、以下のようにして正常組データを構築する。
【0080】
即ち、まず、最新の第α番目の取得組データにおける33種類のデータをそれぞれ、データの1つとして正常組データ内に組み入れる。以下、これらの最新のデータをxjaと表す。このxjaを数式化すると次のようになる。
【数1】
【0081】
次いで、それら33種類の最新データについてそれぞれ、第α番目よりもq番だけ遡った時点から(α−q番目)、第α番目までにおける値の変動の傾きxjbを次式のようにして求めて、正常組データ内に組み入れる。なお、次式におけるTは、最新の取得番号αからの累積取得番号の差(以下、取得番号差という)を表している。また、Σは、取得番号差Tに関する番号の和(1〜q)を表している。
【数2】
【0082】
更に、制御部1は、33種類の最新データについてそれぞれ、第α番目よりもq番だけ遡った時点から(α−q番目)、第α番目までにおける値の変動係数(標準偏差を平均値で除算したもの)xjcを次式のようにして求めて、正常組データ内に組み入れる。なお、次式におけるσj(α)は、ステップq内におけるxjの標準偏差を表している。また、xjav(α)は、ステップq内におけるxjの平均値を表している。
【数3】
【0083】
このようにして正常組データを構築することで、そのデータ種類数は、取得組データ内のデータ種類数の3倍(33×3=99種類)になる。
【0084】
初期運転開始後、初めに構築される第1番目の正常組データは、次に掲げるデータの組合せになる。
・最新の取得組データxj(=1〜33)a(α=q)
・それぞれの取得データ(取得組データ内の1データ)についての第1番目から第q番目までの傾きデータxj(=1〜33)b(α=q)
・それぞれの取得データについての第1番目から第q番目までの変動係数データxj(=1〜33)c(α=q)
【0085】
また、第2番目の正常組データは、次に掲げるデータの組合せになる。
・最新の第α(=q+1)番目の取得組データxj(=1〜33)a(α=q+1)
・それぞれの取得データ(取得組データ内の1データ)についての第2番目から第α(=q+1)番目までの傾きデータxj(=1〜33)b(α=q+1)
・それぞれの取得データについての第2番目から第α(q+1)番目までの変動係数データxj(=1〜33)c(α=q+1)
【0086】
また、第3番目の正常組データは、次に掲げるデータの組合せになる。
・最新の第α(=q+2)番目の取得組データxj(=1〜33)a(α=q+2)
・それぞれの取得データ(取得組データ内の1データ)についての第3番目から第α(=q+2)番目までの傾きデータxj(=1〜33)b(α=q+2)
・それぞれの取得データについての第3番目から第α(q+2)番目までの変動係数データxj(=1〜33)c(α=q+2)
【0087】
このようにして正常組データをp枚プリントアウト毎に順次構築していく。これを、例えば20000枚のプリントアウトを終えるまでなど、第1期間が終了するまで繰り返すのである。
【0088】
なお、以下、取得組データと区別する目的で、正常組データをyj(=1〜99)と表すことにする。
【0089】
次に、上述の第2期間中における予測式構築用のデータの取得処理、及びその後の予測式の構築処理について詳述する。
第2期間中には、正常組データ群と同様にして、各取得時点(α)における最新の取得データと、傾きデータと、変動係数データとを構築していき、これらを正常組データ群とは別のデータテーブルに記憶する。また、図5のS10で示したように、各取得時点(α)における故障の発生の有無を判断し、故障があった場合には、取得時点(α)と関連付けてその発生件数をデータテーブルに記憶する。このデータテーブルを例示すると次の表2に示すようになる。なお、表2において、Mは、故障の発生件数を表している。また、kはデータの種類番号(k=1〜99)を表している。
【表2】
【0090】
このようなデータテーブル(以下、予測式構築用データテーブルという)を構築して第2期間が経過すると、制御部1は次に予測式を構築する。予測式の構築法の概略は次の通りである。即ち、予測式構築用データテーブル内におけるそれぞれの組データ(Mを除くyk=1〜99のデータ)について、先に構築しておいた正常組データ群を用いて多変量解析を行って、正常さ加減を示す異常判定指標値Dを求める。多変量解析としては、どのような解析法を用いてもよいが、以下、2つの方法を例にして説明する。
【0091】
まず、多変量解析の第1の例として、MTS法について説明する。
次に示す表3は、正常組データ群のデータテーブルを示している。なお、表3における組番号(i)は、第何番目に構築された正常組データであるのかを示すものである。
【表3】
【0092】
MTS法を用いる場合には、この正常組データ群に基づいて、次の表4に示すような正規化データテーブルを構築する。
【表4】
【0093】
データの正規化とは、各種データについて、その絶対値情報を変量情報に変換するための処理であり、次に示す関係式に基づいて、各種情報の正規化データが算出される。なお、次式におけるiは、n組の組データのうちの何れか1つであることを示す符号である。また、jは、k種類の情報のうちの何れか1つであることを示す符号である。
【数4】
【0094】
正規化データテーブルを構築すると、次に、各データ間における相関係数を算出する。この工程では、n組の正規化データにおいて、それぞれk種類の正規化データのうち、互いに異なる2種類が成立し得る全ての組合せ(kC2通り)について、次式に基づいて相関係数rpq(rqp)が算出される。
【数5】
【0095】
全ての組合せについての相関係数rpq(rqp)を算出したら、次に、対角要素を1、その他のp行q列の要素を相関係数rpqとした、k×k個の相関係数行列Rを構築する。この相関係数行列Rの内容を、次式に示す。
【数6】
【0096】
このような相関係数行列Rを構築したら、次に、次式で示される逆行列A=(R−1)を構築する。
【数7】
【0097】
この逆行列Aを正常組データ群として扱って、先に表2に示した予測式構築用データテーブル内におけるそれぞれの組データについて、異常判定指標値たるマハラノビス距離(md)を次式に基づいて求める。なお、次式において、Xpは上述の数1、数2、数3の何れかの処理が施された後、数4と同様の処理が行われたデータを示している。
【数8】
【0098】
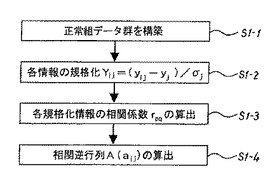
図6は、正常組データ群を逆行列Aに変換するまでの一連のプロセスを示すフローチャートである。同図において、正常組データ群が構築されると(S1−1)、情報の種類(j)毎に、上述の数4の関係式に基づいた平均値と標準偏差σとが算出され、算出結果に基づいて正規化データテーブルが構築される(S1−2)。そして、正規化データテーブルに基づいて相関係数行列Rが構築された後(S1−3)、逆行列Aに変換される(S1−4)。
【0099】
図7は、逆行列Aと各種取得データとに基づいてマハラノビス距離(md)を算出する手順を示すフローチャートである。この手順では、まず、任意の状態でのk種類のデータx1、x2・・・、xkが取得される(S2−1)。データの種類はy11、y12,・・・、y1kなどに対応する。次に、上記数1の関係式に基づいて、それぞれの取得データがX1,X2,・・・,Xkといった具合に規格化される。そして、すでに構築されている逆行列Aの要素akkを用いて決められた上記数8の関係式により、マハラノビス距離(md)の二乗が算出される。図中の「Σ」は、添字pおよびqに関する総和を表している。
【0100】
このようにして求めたマハラノビス距離(md)を、異常判定指標値Dとして用いる。
【0101】
次に、多変量解析の第2例について説明する。
この第2例では、先に表3に示した正常組データ群と、そのときの状態評価値とについて、次に示す2つの関係式に基づいて平均値からの差を求めて基準化する。なお、次式におけるオーバーバー「 ̄」は、正常組データ群内におけるデータの平均値を示している。
【数9】
【数10】
【0102】
このようにして基準化を行った後のデータテーブルを次の表5に示す。
【表5】
【0103】
次いで、先に表2に示した予測式構築用データテーブルにおけるα番目の取得データxj(α)と、これに対応する状態評価値M’(α)とを、次に示す2つの関係式に基づいて同様に基準化して、先の数9の解や数10の解と関連付ける。
【数11】
【数12】
【0104】
そして、次に示す5つの関係式により、βjやηjを求める(Σは予測式構築用データテーブルにおけるαに関する和を表している)。
【数13】
【数14】
【数15】
【数16】
【数17】
【0105】
次いで、次式に基づいて、異常判定指標値Dを求める。
【数18】
【0106】
第1例や第2例のような多変量解析により、予測式構築用データテーブル内の各組データについての異常判定指標値Dを求めたら、次に、それぞれの異常判定指標値Di(=1〜n)と、それぞれに個別に対応する故障の発生件数Mi(=1〜n)(表2におけるM1、M2・・・・Mn)が比例関係にある仮定して、傾き係数β0を次式に基づいて算出する。
【数19】
【0107】
次いで、この傾き係数β0を用いて、データ取得時点αからステップqが経過した未来の時点における故障発生件数の予測値<M>を求めるための次のような予測式を構築する。
【数20】
【0108】
上述した第2期間が経過してかかる予測式を構築した制御部1は、以降、図5のS15〜S20に示したように、p枚プリントアウト毎に取得組データを取得する。そして、その取得組データと、ハードディスク内に記憶している正常組データ群とに基づいて異常判定指標値Dを求める。次いで、異常判定指標値Dと、数20に示した予測式とに基づいて、現時点から(p×ステップq)枚のプリントアウトが行われるまでの故障発生件数の予測値<M>を求める。そして、その予測値<M>を操作表示部3に表示する。
【0109】
なお、取得組データの取得タイミングとして、p枚プリントアウト毎を採用した例について説明したが、所定時間経過毎のタイミングを採用してもよい。また、異常の有無の判定結果や予測値<M>を、電話回線などの通信回線を介して保守サービス機関に送信させるようにしてもよい。
【0110】
次に、実施形態に係る複写機に、より特徴的な構成を付加した各実施例の複写機について説明する。
[第1実施例]
実施形態に係る複写機では、最新の取得組データを取得した現時点(α)から、その後p枚のプリントアウトを行う未来の時点までにおける故障発生件数の予測値<M>を求める。かかる構成では、例えば予測値<M>が「0」であった場合、即ち、異常を検出しなかった場合であっても、「あとp枚は正常にプリントアウトすることができます。」などと操作表示部3に表示して、ユーザーに安心感を与えることができる。また例えば、予測値<M>が「1.2」であった場合、即ち、異常を検出した場合には、「あとp枚のプリントアウトを行うまでに1〜2枚の異常画像が出力されてしまうことが予想されます。」、「あとp枚のプリントアウトを行うまでに1〜2枚の致命的な紙詰まりが発生するおそれがあります。」、「あとp枚のプリントアウトを行うまでに原因不明の故障が1〜2件発生することが予想されます。サービスマンに連絡して下さい。」などといった情報を操作表示部3に表示して、ユーザーに故障発生までの余裕度を知らせることができる。
【0111】
しかしながら、「あとp枚のプリントアウトを行うまで」の期間について、ユーザーによってはどの程度の時間なのかを把握することが困難な場合がある。そこで、本第1実施例に係る複写機においては、次のような制御を実施させるように、制御部1を構成している。即ち、p枚毎というタイミングの代わりに、p時間経過毎というタイミングを、上述の取得タイミングとして採用している。このような取得タイミングでは、予測値<M>が「あとp×q時間経過するまで」における故障発生件数として求められる。そこで、画像形成手段の累積稼働時間を計時しつつ、1日あたりにおける平均稼働時間を演算し、p×q時間を演算結果で除算する制御を実施するように制御部1を構成している。かかる構成では、「あと何日経過するまでに」といった具合に、故障が発生するまでの期間を日数で知らせることで、故障発生までの余裕度をユーザーにより正確に把握させることができる。
【0112】
[第2実施例]
本第2実施例に係る複写機においては、次のような制御を実施させるように、制御部1を構成している。画像形成手段の累積プリントアウト枚数を計数しつつ、1日あたりにおける平均プリント枚数を演算し、p×q枚を演算結果で除算する制御を実施するように制御部1を構成している。かかる構成においても、「あと何日経過するまでに」といった具合に、故障が発生するまでの期間を日数で知らせることで、故障発生までの余裕度をユーザーにより正確に把握させることができる。
【0113】
次に、実施形態に係る複写機の変形例装置について説明する。この変形例装置においては、正常組データ群の構築と、予測式の構築とを同じ期間中に実施する点が、実施形態に係る複写機と異なっている。具体的には、初期運転開始から所定時間が経過するまでの第1期間中において、所定の取得タイミング毎に取得組データを取得して、仮データテーブルに順次格納していく。この際、故障の発生を検知したり、故障が発生した旨の情報が操作表示部3に入力されたりした場合には、その時点からステップqだけ遡った時点から、その時点までに取得された取得組データを仮データテーブルから、上述の予測式構築用データテーブルに移す。同時に、その予測式構築用データテーブルに故障の発生件数のデータを入力する。そして、第1期間が経過すると、上記仮データテーブルに基づいて正常組データ群を構築する。また、予測式構築用データテーブルに基づいて、故障発生件数の予測式を構築する。
【0114】
このようにして正常組データ群と予測式とを構築したら、それ以降の第2期間中において、取得組データや予測式などに基づいて、故障発生件数の予測を行う。
【0115】
以上、実施形態に係る複写機においては、正常組データとして、複数種類の取得データ及びこれらにそれぞれ個別に対応する複数の傾きデータ(Xjb(α))の他に、それら取得データについてそれぞれ、取得時点よりも過去に所定の取得回数分だけ遡った時点から取得時点αまでの間における変動係数データ(Xjc(α))を含んでいるものをデータ記憶手段たるハードディスクに記憶させている。そして、データ取得手段たる制御部1によって取得された最新の取得組データ(Xjb(α))と、ハードディスクに記憶されている過去の取得組データとに基づいて、取得組データ内の各取得データのそれぞれについて傾きデータ及び変動係数データを演算する。更に、演算結果と、最新の取得組データと、正常組データ群とに基づいて異常判定指標値Dを演算する。かかる構成では、正常組データ群に含める取得組データ以外のデータとして、傾きデータだけを含める場合に比べて、異常発生件数の予測値<M>をより正確に予測することができる。
【0116】
また、実施形態に係る複写機においては、故障発生件数を計数する計数手段として制御部1を機能させている。そして、所定の第1期間中に取得された取得組データに基づいて正常組データ群を構築させ、その後の第2期間中に取得された上記取得組データと、制御部1よって計数された故障発生件数とに基づいて傾き係数β0を演算させ、且つ、その後の第3期間である第2期間経過後に取得された取得組データと、これに基づく傾きデータと、正常組データ群とに基づいて演算した異常判定指標値Dに、所定の係数たる(1/傾き係数β0)を乗ずることで予測値<M>を求めさせるようにしている。かかる構成では、正常組データ群の構築と、その後の予測式の構築と、更にその後の異常判定や予測値の予測とを自動で行わせることができる。
【0117】
また、変形例装置においては、故障発生件数を計数する計数手段として制御部1を機能させている。そして、所定の第1期間中にデータ取得手段によって取得された取得組データに基づいて正常組データ群を構築させるとともに、取得組データと制御部1によって計数した故障発生件数とに基づいて傾き係数β0を演算させ、且つ、その後の第2期間中にデータ取得手段によって取得された上記取得組データと、これに基づく傾きデータと、正常組データ群とに基づいて演算した異常判定指標値Dに、所定の係数たる(1/傾き係数β0)を乗ずることで予測値<M>を求めさせるようにしている。かかる構成においても、正常組データ群の構築と、その後の予測式の構築と、更にその後の異常判定や予測値の予測とを自動で行わせることができる。
【0118】
また、第1実施例に係る複写機においては、画像形成手段の1日あたりにおける平均稼働時間に基づいて、最新の取得組データを取得した時点(α)から所定回数分(ステップq)のデータ取得を行う未来の時点までの期間を補正する補正手段として制御部1を機能させている。そして、予測値<M>を補正後の期間における故障の発生件数の予測値として報知するように報知手段として、制御部1及び操作表示部3の組合せを機能させている。かかる構成では、予測値<M>を、単に、取得時点(α)からステップqが経過するまでの期間における故障発生件数の予測値としてユーザーに報知する場合に比べて、ユーザーに対して、取得時点(α)から故障が発生するまでの余裕度合いをより正確に把握させることができる。
【0119】
また、第2実施例に係る複写機においては、画像形成手段の1日あたりにおける記録部材の平均出力数である1日平均プリント枚数に基づいて、最新の取得組データを取得した時点(α)から所定回数分(ステップq)のデータ取得を行う未来の時点までの期間を補正する補正手段として、制御部1を機能させている。そして、予測値<M>を、補正後の期間における故障の発生件数の予測値として報知する報知手段として、制御部1及び操作表示部3の組合せを機能させている。かかる構成においても、予測値<M>を、単に、取得時点(α)からステップqが経過するまでの期間における故障発生件数の予測値としてユーザーに報知する場合に比べて、ユーザーに対して、取得時点(α)から故障が発生するまでの余裕度合いをより正確に把握させることができる。
【図面の簡単な説明】
【0120】
【図1】実施形態に係る複写機を示す概略構成図。
【図2】同複写機のプリンタ部を示す概略構成図。
【図3】同複写機のタンデム部を示す部分拡大図。
【図4】同複写機の電気回路の一部を示すブロック図。
【図5】同本複写機の制御部によって、比較的長期間に渡って実施される長期制御における処理フローを示すフローチャート。
【図6】正常組データ群を逆行列に変換するまでの一連のプロセスを示すフローチャート。
【図7】逆行列と各種取得データとに基づいてマハラノビス距離を算出する手順を示すフローチャート。
【符号の説明】
【0121】
1:制御部(データ取得手段の一部、報知手段の一部、指標値演算手段、データ記憶手段、記憶制御手段、計数手段、補正手段)
2:各種センサ(データ取得手段の一部)
3:操作表示部(データ取得手段の一部、報知手段の一部)
100:プリンタ部(画像形成手段の一部)
200:給紙部(画像形成手段の一部)
【技術分野】
【0001】
本発明は、複写機、ファクシミリ、プリンタ等の画像形成装置に係り、詳しくは、装置内の異常の有無を判定する手段の改良に関するものである。
【背景技術】
【0002】
従来、市場に出回っている様々な画像形成装置においては、故障が発生すると、その内容によっては部品を交換したり清掃したりするまで装置を使用することができず、ユーザーに不便を強いてしまうことがある。特に、電子写真方式の画像形成装置では、構成が比較的複雑で部品点数が多いことから、各種の部品のメンテナンスを定期的に行わないと、故障が突然に発生してしまうという事態に陥り易くなる。
【0003】
そこで、感光体や現像装置などといった装置内の各種部品や機器の累積稼働時間をカウンターによって順次カウントしていき、カウント値が所定の上限値に達した時点でその部品の交換時期の到来を報知する画像形成装置が知られている。かかる構成によれば、ユーザーや保守サービス機関に対して、部品や機器の交換を定期的に促すことができる。
【0004】
しかしながら、部品や機器の寿命の到来時期と、累積稼働時間とは完全な相関関係を示さないため、故障発生前のタイミングを確実に検出するためには、かなり余裕をもって上述の上限値を設定する必要がある。そして、これにより、実際には寿命到来までまだ十分に余裕があるにもかかわらず、部品や機器の交換を促してしまうという不具合が生じていた。
【0005】
一方、従来より、多変量解析によって被検対象の正常さ加減を量る種々の方法が知られている。例えば、非特許文献1に記載されたMTS(Maharanobis Taguchi System)法も、その1つである。MTS法では、まず、正常な状態の被検対象、あるいはこれと同一仕様のものから、複数種類のデータからなる正常組データを取得する。そして、この正常組データを数多く収集して正常組データ群を構築する。その後、被検対象の正常さ加減を調べたいときに、被検対象から正常組データと同様の種類のデータからなる取得組データを取得する。そして、の取得組データについて、予め構築しておいた正常組データ群による多次元空間内でどのような相対位置関係にあるのかを示す異常判定指標値たるマハラノビス距離を求め、その結果に基づいて被検対象の正常さ加減を量る。MTS法に限らず、例えば主成分分析法などといった他の多変量解析を用いても、正常組データ群と、取得組データとに基づいて被検対象の正常さ加減を量ることができる。
【0006】
このような多変量解析に基づいて、画像形成装置内における異常の有無を判定すれば、部品や機器の実際の劣化度合い応じた適切な交換時期を検出することができる。
【0007】
【非特許文献1】「MTシステムにおける技術開発」 刊行委員会委員長 田口玄一著 日本規格協会刊
【発明の開示】
【発明が解決しようとする課題】
【0008】
ところが、部品や機器の劣化の進行速度は、例えば部品間に異物が挟まっているなど、様々な要因によって変化する。多変量解析では、正常さ加減がある程度まで低下した時点、換言すると、部品や機器の劣化がある程度まで進行した時点を正確に検出することはできる。しかし、劣化の進行速度を把握することができないため、その後どれくらい経過すると故障発生が発生してしまうのかを予測することはできなかった。ユーザーにとっては、部品や機器の交換が促された時点から、交換なしでその後どれくらい装置を稼働させ得るのかという情報が非常に重要になる場合がある。特に、多量のプリントアウトを、ある時間帯に集中的に行ったり、休日や夜間にも行ったりするユーザーにとっては、部品等の交換が促されてから実際に交換するまでのタイミングを誤ると、故障が発生して業務に支障をきたすおそれが出てくる。
【0009】
本発明は、以上の背景に鑑みなされたものであり、その目的とするところは、次のような画像形成装置を提供することである。即ち、現時点からどの程度経過した時点で故障が発生するのかを予測することができる画像形成装置である。
【課題を解決するための手段】
【0010】
上記目的を達成するために、請求項1の発明は、記録部材に画像を形成する画像形成手段と、画像形成手段から複数種類のデータを取得するデータ取得手段と、互いに正常な値の該複数種類のデータを含む正常組データの集まりである正常組データ群を記憶するデータ記憶手段と、該データ取得手段によって取得された複数種類のデータからなる取得組データ、及び該データ記憶手段に記憶されている正常組データ群に基づいて異常判定指標値を演算する指標値演算手段とを備える画像形成装置において、上記データ取得手段によって取得された上記取得組データを所定のタイミングが到来する毎に上記データ記憶手段に順次記憶させていく記憶制御手段を設け、上記正常組データとして、上記複数種類のデータの他に、それらデータについてそれぞれ、取得時点よりも過去に所定の取得回数分だけ遡った時点から該取得時点までの間における値の変動の傾きデータを含んでいるものを上記データ記憶手段に記憶させ、且つ、上記データ取得手段によって取得された最新の上記取得組データと、上記データ記憶手段に記憶されている過去の上記取得組データとに基づいて、取得組データ内の上記複数種類のデータのそれぞれについて上記傾きデータを演算した後、この演算結果と、該最新の取得組データと、上記正常組データ群とに基づいて上記異常判定指標値を演算するように上記指標値演算手段を構成したことを特徴とするものである。
また、請求項2の発明は、請求項1の画像形成装置において、上記正常組データとして、上記複数種類のデータ及びこれらにそれぞれ個別に対応する複数の上記傾きデータの他に、該複数種類のデータについてそれぞれ、取得時点よりも過去に所定の取得回数分だけ遡った時点から該取得時点までの間における変動係数データを含んでいるものを上記データ記憶手段に記憶させ、且つ、上記データ取得手段によって取得された最新の上記取得組データと、上記データ記憶手段に記憶されている過去の上記取得組データとに基づいて、取得組データ内の上記複数種類のデータのそれぞれについて上記傾きデータ及び変動係数データを演算した後、演算結果と、該最新の取得組データと、上記正常組データ群とに基づいて上記異常判定指標値を演算するように上記指標値演算を構成したことを特徴とするものである。
また、請求項3の発明は、請求項1又は2の画像形成装置において、故障発生件数を計数する計数手段を設け、所定の第1期間中に上記データ取得手段によって取得された上記取得組データに基づいて上記正常組データ群を構築させ、その後の第2期間中に該データ取得手段によって取得された上記取得組データと、該計数手段によって計数された故障発生件数とに基づいて所定の係数を演算させ、且つ、その後の第3期間中に該データ取得手段によって取得された上記取得組データと、これに基づく上記傾きデータと、該正常組データ群とに基づいて演算した上記異常判定指標値に該所定の係数を乗ずることで、上記最新の取得組データを取得した時点から上記所定回数分のデータ取得を行う未来の時点までにおける故障の発生件数の予測値を求めさせるようにしたことを特徴とするものである。
また、請求項4の発明は、請求項1又は2の画像形成装置において、故障発生件数を計数する計数手段を設け、所定の第1期間中に上記データ取得手段によって取得された上記取得組データに基づいて上記正常組データ群を構築させるとともに、該取得組データと該計数手段によって計数された故障発生件数とに基づいて所定の係数を演算させ、且つ、その後の第2期間中に該データ取得手段によって取得された上記取得組データと、これに基づく上記傾きデータと、該正常組データ群とに基づいて演算した上記異常判定指標値に該所定の係数を乗ずることで、上記最新の取得組データを取得した時点から上記所定回数分のデータ取得を行う未来の時点までにおける故障の発生件数の予測値を求めさせるようにしたことを特徴とするものである。
また、請求項5の発明は、請求項3又は4の画像形成装置において、上記画像形成手段の1日あたりにおける平均稼働時間に基づいて、上記最新の取得組データを取得した時点から上記所定回数分のデータ取得を行う未来の時点までの期間を補正する補正手段を設けるとともに、上記発生件数を補正後の期間における故障の発生件数の予測値として報知するように報知手段を設けたことを特徴とするものである。
また、請求項6の発明は、請求項3又は4の画像形成装置において、上記画像形成手段の1日あたりにおける記録部材の平均出力数に基づいて、上記最新の取得組データを取得した時点から上記所定回数分のデータ取得を行う未来の時点までの期間を補正する補正手段を設けるとともに、上記発生件数を補正後の期間における故障の発生件数の予測値として報知する報知手段を設けたことを特徴とするものである。
【発明の効果】
【0011】
これらの発明においては、データ取得手段によって取得可能なセンシングデータなどといった各種のデータの他に、それらデータについてそれぞれ、取得時点よりも過去に所定の取得回数分だけ遡った時点から該取得時点までの間における値の変動の傾きデータを正常組データ群における各正常組データに含めている。そして、正常組データ群と対比するためのデータとして、データ取得手段によって取得した取得組データの他に、それに含まれる各種のデータについての同様の傾きデータを用いて、異常判定指標値を演算する。このようにして演算した異常判定指標値には、現時点の部材や機器における正常さ加減の変動の傾き、即ち、劣化の進行速度、を反映させている。このため、異常判定指標値の大きさは、単に画像形成手段の正常さ加減だけを示すものではなく、正常さ加減と、劣化の進行速度との両方を示すものとなる。そして、正常さ加減がある程度悪くなっていたとしても、劣化の進行速度が比較的遅ければ、異常判定指標値は正常値に近いものとなる。これに対し、正常さ加減がある程度良好であったとしても、劣化の進行速度がかなり速ければ、異常判定指標値は正常値からかけはなれたものになる。このような異常判定指標値は、所定の閾値に達することで被検対象について所定の劣化度合いに達したことを示していた従来の異常判定指標値とは異なり、その大きさにより、現時点からどの程度経過した時点で故障が発生するのかを示すようになる。よって、異常判定指標値の大きさに基づいて、現時点からどの程度経過した時点で故障が発生するのかを予測することができる。
【発明を実施するための最良の形態】
【0012】
以下、本発明を、画像形成装置である電子写真方式の複写機(以下、単に複写機という)に適用した一実施形態について説明する。
まず、本実施形態に係る複写機の基本的な構成について説明する。図1は、本複写機を示す概略構成図である。この複写機は、プリンタ部100と給紙部200とからなる画像形成手段と、スキャナ部300と、原稿搬送部400とを備えている。スキャナ部300はプリンタ部100上に取り付けられ、そのスキャナ部300の上に原稿自動搬送装置(ADF)からなる原稿搬送部400が取り付けられている。
【0013】
スキャナ部300は、コンタクトガラス32上に載置された原稿の画像情報を読取センサ36で読み取り、読み取った画像情報を図示しない制御部に送る。制御部は、スキャナ部300から受け取った画像情報に基づき、プリンタ部100の露光装置21内に配設された図示しないレーザやLED等を制御してドラム状の4つの感光体40K,Y,M,Cに向けてレーザ書き込み光Lを照射させる。この照射により、感光体40K,Y,M,Cの表面には静電潜像が形成され、この潜像は所定の現像プロセスを経由してトナー像に現像される。なお、符号の後に付されたK,Y,M,Cという添字は、ブラック,イエロー,マゼンタ,シアン用の仕様であることを示している。
【0014】
プリンタ部100は、露光装置21の他、1次転写ローラ62K,Y,M,C、2次転写装置22、定着装置25、排紙装置、図示しないトナー供給装置、トナー供給装置等も備えている。
【0015】
給紙部200は、プリンタ部100の下方に配設された自動給紙部と、プリンタ部100の側面に配設された手差し部とを有している。そして、自動給紙部は、ペーパーバンク43内に多段に配設された2つの給紙カセット44、給紙カセットから記録体たる転写紙を繰り出す給紙ローラ42、繰り出した転写紙を分離して給紙路46に送り出す分離ローラ45等を有している。また、プリンタ部100の給紙路48に転写紙を搬送する搬送ローラ47等も有している。一方、手差し部は、手差しトレイ51、手差しトレイ51上の転写紙を手差し給紙路53に向けて一枚ずつ分離する分離ローラ52等を有している。
【0016】
プリンタ部100の給紙路48の末端付近には、レジストローラ対49が配設されている。このレジストローラ対49は、給紙カセット44や手差しトレイ51から送られてくる転写紙を受け入れた後、所定のタイミングで中間転写体たる中間転写ベルト10と2次転写装置22との間に形成される2次転写ニップに送る。
【0017】
本複写機において、操作者は、カラー画像のコピーをとるときに、原稿搬送部400の原稿台30上に原稿をセットする。あるいは、原稿搬送部400を開いてスキャナ部300のコンタクトガラス32上に原稿をセットした後、原稿搬送部400を閉じて原稿を押さえる。そして、図示しないスタートスイッチを押す。すると、原稿搬送部400に原稿がセットされている場合には原稿がコンタクトガラス32上に搬送された後に、コンタクトガラス32上に原稿がセットされている場合には直ちに、スキャナ部300が駆動を開始する。そして、第1走行体33及び第2走行体34が走行し、第1走行体33の光源から発せられる光が原稿面で反射した後、第2走行体34に向かう。更に、第2走行体34のミラーで反射してから結像レンズ35を経由して読取りセンサ36に至り、画像情報として読み取られる。
【0018】
このようにして画像情報が読み取られると、プリンタ部100は、図示しない駆動モータで支持ローラ14、15、16の1つを回転駆動させながら他の2つの支持ローラを従動回転させる。そして、これらローラに張架される中間転写ベルト10を無端移動させる。更に、上述のようなレーザ書き込みや、後述する現像プロセスを実施する。そして、感光体40K,Y,M,Cを回転させながら、それらに、ブラック,イエロー,マゼンタ,シアンの単色画像を形成する。これらは、感光体40K,Y,M,Cと、中間転写ベルト10とが当接するK,Y,M,C用の1次転写ニップで順次重ね合わせて静電転写されて4色重ね合わせトナー像になる。感光体40K、40Y、40M、40C上にトナー像を形成する。
【0019】
一方、給紙部200は、画像情報に応じたサイズの転写紙を給紙すべく、3つの給紙ローラのうちの何れか1つを作動させて、転写紙をプリンタ部100の給紙路48に導く。給紙路48内に進入した転写紙は、レジストローラ対49に挟み込まれて一旦停止した後、タイミングを合わせて、中間転写ベルト10と2次転写装置22の2次転写ローラ23との当接部である2次転写ニップに送り込まれる。すると、2次転写ニップにおいて、中間転写ベルト10上の4色重ね合わせトナー像と、転写紙とが同期して密着する。そして、ニップに形成されている転写用電界やニップ圧などの影響によって4色重ね合わせトナー像が転写紙上に2次転写され、紙の白色と相まってフルカラー画像となる。
【0020】
2次転写ニップを通過した転写紙は、2次転写装置22の搬送ベルト24の無端移動によって定着装置25に送り込まれる。そして、定着装置25の加圧ローラ27による加圧力と、加熱ベルトによる加熱との作用によってフルカラー画像が定着せしめられた後、排出ローラ56を経てプリンタ部100の側面に設けられた排紙トレイ57上に排出される。
【0021】
図2は、プリンタ部100を示す拡大構成図である。プリンタ部100は、ベルトユニット、各色のトナー像を形成する4つのプロセスユニット18K,Y,M,C、2次転写装置22、ベルトクリーニング装置17、定着装置25等を備えている。
【0022】
ベルトユニットは、複数のローラに張架した中間転写ベルト10を、感光体40K,Y,M,Cに当接させながら無端移動させる。感光体40K,Y,M,Cと中間転写ベルト10とを当接させるK,Y,M,C用の1次転写ニップでは、1次転写ローラ62K,Y,M,Cによって中間転写ベルト10を裏面側から感光体40K,Y,M,Cに向けて押圧している。これら1次転写ローラ62K,Y,M,Cには、それぞれ図示しない電源によって1次転写バイアスが印加されている。これにより、K,Y,M,C用の1次転写ニップには、感光体40K,Y,M,C上のトナー像を中間転写ベルト10に向けて静電移動させる1次転写電界が形成されている。各1次転写ローラ62K,Y,M,Cの間には、中間転写ベルト10の裏面に接触する導電性ローラ74がそれぞれ配設されている。これら導電性ローラ74は、1次転写ローラ62K,Y,M,Cに印加される1次転写バイアスが、中間転写ベルト10の裏面側にある中抵抗の基層11を介して隣接するプロセスユニットに流れ込むことを阻止するものである。
【0023】
プロセスユニット(18K,Y,M,C)は、感光体(40K,Y,M,C)と、その他の幾つかの装置とを1つのユニットとして共通の支持体に支持するものであり、プリンタ部100に対して着脱可能になっている。ブラック用のプロセスユニット18Kを例にすると、これは、感光体40Kの他、感光体40K表面に形成された静電潜像をブラックトナー像に現像するための現像手段たる現像ユニット61Kを有している。また、1次転写ニップを通過した後の感光体40K表面に付着している転写残トナーをクリーニングする感光体クリーニング装置63Kも有している。また、クリーニング後の感光体40K表面を除電する図示しない除電装置や、除電後の感光体40K表面を一様帯電せしめる図示しない帯電装置なども有している。他色用のプロセスユニット18Y,M,Cも、取り扱うトナーの色が異なる他は、ほぼ同様の構成になっている。本複写機では、これら4つのプロセスユニット18K,Y,M,Cを、中間転写ベルト10に対してその無端移動方向に沿って並べるように対向配設したいわゆるタンデム型の構成になっている。
【0024】
図3は、4つのプロセスユニット18K,Y,M,Cからなるタンデム部20の一部を示す部分拡大図である。なお、4つのプロセスユニット18K,Y,M,Cは、それぞれ使用するトナーの色が異なる他はほぼ同様の構成になっているので、同図においては各符号に付すK,Y,M,Cという添字を省略している。同図に示すように、プロセスユニット18は、感光体40の周りに、帯電手段としての帯電装置60、現像装置61、1次転写手段としての1次転写ローラ62、感光体クリーニング装置63、除電装置64等を備えている。
【0025】
感光体40としては、アルミニウム等の素管に、感光性を有する有機感光材を塗布し、感光層を形成したドラム状のものを用いている。但し、無端ベルト状のものを用いても良い。また、帯電装置60としては、帯電バイアスが印加される帯電ローラを感光体40に当接させながら回転させるものを用いている。感光体40に対して非接触で帯電処理を行うスコロトロンチャージャ等を用いてもよい。
【0026】
現像装置61は、磁性キャリアと非磁性トナーとを含有する二成分現像剤を用いて潜像を現像するようになっている。内部に収容している二成分現像剤を攪拌しながら搬送して現像スリーブ65に供給する攪拌部66と、現像スリーブ65に付着した二成分現像剤のうちのトナーを感光体4K,Y,M,Cに転移させる現像部67とを有している。
【0027】
攪拌部66は、現像部67よりも低い位置に設けられており、互いに平行配設された2本のスクリュウ68、これらスクリュウ間に設けられた仕切り板、現像ケース70の底面に設けられたトナー濃度センサ71などを有している。
【0028】
現像部67は、現像ケース70の開口を通して感光体40に対向する現像スリーブ65、これの内部に回転不能に設けられたマグネットローラ72、現像スリーブ65に先端を接近させるドクタブレード73などを有している。ドクタブレード73と現像スリーブ65との間の最接近部における間隔は500[μm]程度に設定されている。現像スリーブ65は、非磁性の回転可能なスリーブ状の形状になっている。また、現像スリーブ65に連れ回らないようにないようされるマグネットローラ72は、例えば、ドクタブレード73の箇所から現像スリーブ65の回転方向にN1、S1、N2、S2、S3の5磁極を有している。これら磁極は、それぞれスリーブ上の二成分現像剤に対して回転方向の所定位置で磁力を作用させる。これにより、攪拌部66から送られてくる二成分現像剤を現像スリーブ65表面に引き寄せて担持させるとともに、スリーブ表面上で磁力線に沿った磁気ブラシを形成する。
【0029】
磁気ブラシは、現像スリーブ65の回転に伴ってドクタブレード73との対向位置を通過する際に適正な層厚に規制されてから、感光体40に対向する現像領域に搬送される。そして、現像スリーブ65に印加される現像バイアスと、感光体40の静電潜像との電位差によって静電潜像上に転移して現像に寄与する。更に、現像スリーブ65の回転に伴って再び現像部67内に戻り、マグネットローラ72の磁極間の反発磁界の影響によってスリーブ表面から離脱した後、攪拌部66に戻される。攪拌部66内では、トナー濃度センサ71による検知結果に基づいて、二成分現像剤に適量のトナーが補給される。なお、現像装置61として、二成分現像剤を用いるものの代わりに、磁性キャリアを含まない一成分現像剤を用いるものを採用してもよい。
【0030】
感光体クリーニング装置63としては、ポリウレタンゴム製のクリーニングブレード75を感光体40に押し当てる方式のものを用いているが、他の方式のものを用いてもよい。クリーニング性を高める目的で、本例では、外周面を感光体40に接触させる接触導電性のファーブラシ76を、図中矢印方向に回転自在に有するクリーニング装置63を採用している。そして、ファーブラシ76にバイアスを印加する金属製電界ローラ77を図中矢示方向に回転自在に設け、その電界ローラ77にスクレーパ78の先端を押し当てている。スクレーパ78によって電界ローラ77から除去されたトナーは、回収スクリュ79上に落下して回収される。
【0031】
かかる構成の感光体クリーニング装置63は、感光体40に対してカウンタ方向に回転するファーブラシ76で、感光体40上の残留トナーを除去する。ファーブラシ76に付着したトナーは、ファーブラシ76に対してカウンタ方向に接触して回転するバイアスを印加された電界ローラ77に取り除かれる。電界ローラ77に付着したトナーは、スクレーパ78でクリーニングされる。感光体クリーニング装置63で回収したトナーは、回収スクリュ79で感光体クリーニング装置63の片側に寄せられ、トナーリサイクル装置80で現像装置61へと戻されて再利用される。
【0032】
除電装置64は、除電ランプ等からなり、光を照射して感光体40の表面電位を除去する。このようにして除電された感光体40の表面は、帯電装置60によって一様帯電せしめられた後、光書込処理がなされる。
【0033】
ベルトユニットの図中下方には、2次転写装置22が設けられている。この2次転写装置22は、2つのローラ23間に、2次転写ベルト24を掛け渡して無端移動させている。2つのローラ23のうち、一方は図示しない電源によって2次転写バイアスが印加される2次転写ローラとなっており、ベルトユニットのローラ16との間に中間転写ベルト10と2次転写ベルト24とを挟み込んでいる。これにより、両ベルトが当接しながら当接部で互いに同方向に移動する2次転写ニップが形成されている。レジストローラ対49からこの2次転写ニップに送り込まれた転写紙には、中間転写ベルト10上の4色重ね合わせトナー像が2次転写電界やニップ圧の影響で一括2次転写されて、フルカラー画像が形成される。2次転写ニップを通過した転写紙は、中間転写ベルト10から離間して、2次転写ベルト24の表面に保持されながら、ベルトの無端移動に伴って定着装置25へと搬送される。なお、2次転写ローラに代えて、転写チャージャ等によって2次転写を行わせるようにしてもよい。
【0034】
2次転写ニップを通過した中間転写ベルト10の表面は、支持ローラ15による支持位置にさしかかる。ここでは、中間転写ベルト10が、おもて面(ループ外面)に当接するベルトクリーニング装置17と、裏面に当接する支持ローラ15との間に挟み込まれる。そして、ベルトクリーニング装置17により、おもて面に付着している転写残トナーが除去された後、K,Y,M,C用の1次転写ニップに順次進入して、次の4色トナー像が重ね合わされる。
【0035】
ベルトクリーニング装置17は、2つのファーブラシ90,91を有している。これらは、複数の起毛をその植毛方向に対してカウンタ方向で中間転写ベルト10に当接させながら回転することで、ベルト上の転写残トナーを機械的に掻き取る。加えて、図示しない電源によってクリーニングバイアスが印加されることで、掻き取った転写残トナーを静電的に引き寄せて回収する。
【0036】
ファーブラシ90,91に対しては、それぞれ金属ローラ92,93が接触しながら、順または逆方向に回転している。これら金属ローラ92,93のうち、中間転写ベルト10の回転方向上流側に位置する金属ローラ92には、電源94によってマイナス極性の電圧が印加されている。また、下流側に位置する金属ローラ93には、電源95によってプラス極性の電圧が印加される。そして、それらの金属ローラ92,93には、それぞれブレード96,97の先端が当接している。かかる構成では、中間転写ベルト10の図中矢印方向への無端移動に伴って、まず、上流側のファーブラシ90が中間転写ベルト10表面をクリーニングする。このとき、例えば金属ローラ92に−700[V]が印加されながら、ファーブラシ90に−400[V]が印加されると、まず、中間転写ベルト10上のプラス極性のトナーがファーブラシ90側に静電転移する。そして、ファーブラシ側に転移したトナーが更に電位差によってファーブラシ90から金属ローラ92に転移して、ブレード96によって掻き落とされる。
【0037】
このように、ファーブラシ90で中間転写ベルト10上のトナーが除去されるが、中間転写ベルト10上にはまだ多くのトナーが残っている。それらのトナーは、ファーブラシ90に印加されるマイナス極性のバイアスにより、マイナスに帯電される。これは、電荷注入または放電により帯電されるものと考えられる。次いで下流側のファーブラシ91を用いて今度はプラス極性のバイアスを印加してクリーニングを行うことにより、それらのトナーを除去することができる。除去したトナーは、電位差によりファーブラシ91から金属ローラ93に転移させ、ブレード97により掻き落とす。ブレード96、97で掻き落としたトナーは、不図示のタンクに回収される。
【0038】
ファーブラシ91でクリーニングされた後の中間転写ベルト10表面は、ほとんどのトナーが除去されているがまだ少しのトナーが残っている。これらの中間転写ベルト10上に残ったトナーは、上述したようにファーブラシ91に印加されるプラス極性のバイアスにより、プラス極性に帯電される。そして、1次転写位置で印加される転写電界によって感光体40K,Y,M,C側に転写され、感光体クリーニング装置63で回収される。
【0039】
レジストローラ対49は一般的には接地されて使用されることが多いが、転写紙Pの紙粉除去のためにバイアスを印加することも可能である。
【0040】
2次転写装置22および定着装置25の下には、上述したタンデム部20と平行に延びるような、転写紙反転装置28(図1参照)が設けられている。これにより、片面に対する画像定着処理を終えた転写紙が、切換爪で転写紙の進路を転写紙反転装置側に切り換えられ、そこで反転されて再び2次転写転写ニップに進入する。そして、もう片面にも画像の2次転写処理と定着処理とが施された後、排紙トレイ上に排紙される。
【0041】
本複写機は、その構成要素の状態や内部で生ずる現象に関連する様々な情報を取得するデータ取得手段を備えている。このデータ取得手段は、図4に示される制御部1、各種センサ2、操作表示部3などから構成されている。制御部1は、複写機全体の制御を司る制御手段であり、制御プログラムを記憶しているデータ記憶手段たるROM1c、演算データや制御パラメータ等を記憶するデータ記憶手段たるRAM1b、CPU1a等を有している。また、データ記憶手段たる図示しないハードディスクも有している。操作表示部3は、文字情報等を表示する液晶ディスプレイ等から構成される表示部3aや、テンキー等などによって操作者から入力データを受け付けて制御部1cに送る操作部3bなどを有している。本複写機では、これら制御部1、各種センサ2、操作表示部3等からなるデータ取得手段が、ROM(1c)等のデータ記憶手段に記憶された正常組データ群と、複写機から定期的に取得した取得組データとに基づいて後述する異常判定指標値を演算する指標値演算手段としても機能している。また、データ取得手段によって取得された取得組データを所定のタイミングが到来する毎にデータ記憶手段たるハードディスクに順次記憶させていく記憶制御手段としても機能している。
【0042】
本複写機のデータ取得手段によって取得される各種のデータとしては、センシングデータ、制御パラメータデータ、入力データ、画像読取データなどが挙げられる。以下、これらのデータについて詳述する。
【0043】
(a)センシングデータ
センシングデータとしては、駆動関係、記録媒体の各種特性、現像剤特性、感光体特性、電子写真の各種プロセス状態、環境条件、記録物の各種特性などが取得する対象として考えられる。これらのセンシングデータの概要を説明すると、以下のようになる。
【0044】
(a-1)駆動系統のデータ
・感光体ドラムの回転速度をエンコーダーで検出したり、駆動モータの電流値を読み取ったり、駆動モータの温度を読み取る。
・同様にして、定着ローラ、紙搬送ローラ、駆動ローラなどの円筒状またはベルト状の回転する部品の駆動状態を検出する。
・駆動により発生する音を装置内部または外部に設置されたマイクロフォンで検出する。
【0045】
(a-2)紙搬送の状態
・透過型または反射型の光センサ、あるいは接触タイプのセンサにより、搬送された紙の先端や後端の位置を読み取り、紙詰まりが発生したことを検出したり、紙の先端や後端の通過タイミングのずれ、送り方向と垂直な方向の変動などを読み取る。
・同様に、複数のセンサ間の検出タイミングにより、紙の移動速度を求める。
・給紙時の給紙ローラと紙とのスリップを、ローラの回転数計測値と紙の移動量との比較で求める。
【0046】
(a-3)紙などの記録媒体の各種特性
このデータは、画質やシート搬送の安定性に大きく影響する。この紙種のデータ取得には以下のような方法がある。
・紙の厚みは、紙を二つのローラで挟み、ローラの相対的な位置変位を光学センサ等で検知したり、紙が進入してくることによって押し上げられる部材の移動量と同等の変位量を検知することによって求める。
・紙の表面粗さは、転写前の紙の表面にガイド等を接触させ、その接触によって生じる振動や摺動音等を検知する。
・紙の光沢は、規定された入射角で規定の開き角の光束を入射し、鏡面反射方向に反射する規定の開き角の光束をセンサで測定する。
・紙の剛性は、押圧された紙の変形量(湾曲量)を検知することにより求める。
・再生紙か否かの判断は、紙に紫外線を照射してその透過率を検出して行なう。
・裏紙か否かの判断は、LEDアレイ等の線状光源から光を照射し、転写面から反射した光をCCD等の固体撮像素子で検出して行なう。
・OHP用のシートか否かは、用紙に光を照射し、透過光と角度の異なる正反射光を検出して判断する。
・紙に含まれている水分量は、赤外線またはμ波の光の九州を測定することにより求める。
・カール量は光センサ、接触センサなどで検出する。
・紙の電気抵抗は、一対の電極(給紙ローラなど)を記録紙と接触させて直接測定したり、紙転写後の感光体や中間転写体の表面電位を測定して、その値から記録紙の抵抗値を推定する。
【0047】
(a-4)現像剤特性
現像剤(トナーやキャリア)の装置内での特性は、電子写真プロセスの機能の根幹に影響するものである。そのため、システムの動作や出力にとって重要な因子となる。現像剤の情報を得ることは極めて重要である。この現像剤特性としては、例えば次のような項目が挙げられる。
・トナーについては、帯電量およびその分布、流動性、凝集度、嵩密度、電気抵抗、外添剤量、消費量または残量、流動性、トナー濃度(トナーとキャリアの混合比)を挙げることができる。
・キャリアについては、磁気特性、コート膜厚、スペント量などを挙げることができる。
これらのデータを複写機の中において単独で検出することは通常困難である。そこで、現像剤の総合的な特性として検出すると良い。この現像剤の総合的な特性は、例えば次のように測定することができる。
・感光体上にテスト用潜像を形成し、予め決められた現像条件で現像して、形成されたトナー像の反射濃度(光反射率)を測定する。
・現像装置中に一対の電極を設け、印加電圧と電流の関係を測定する(抵抗、誘電率など)。
・現像装置中にコイルを設け、電圧電流特性を測定する(インダクタンス)。
・現像装置中にレベルセンサを設けて、現像剤容量を検出する。レベルセンサは光学式、静電容量式などがある。
【0048】
(a-5)感光体特性
感光体特性も現像剤特性と同じく、電子写真プロセスの機能と密接に関わる。この感光体特性のデータとしては、感光体の膜厚、表面特性(摩擦係数、凹凸)、表面電位(各プロセス前後)、表面エネルギー、散乱光、温度、色、表面位置(フレ)、線速度、電位減衰速度、電気抵抗、静電容量、表面水分量などが挙げられる。このうち、複写機の中では、次のようなデータを検出できる。
・膜厚変化に伴う静電容量の変化を、帯電部材から感光体に流れる電流を検知し、同時に帯電部材への印加電圧と予め設定された感光体の誘電厚みに対する電圧電流特性と照合することにより、膜厚を求める。
・表面電位、温度は従来周知のセンサで求めることができる。
・線速度は感光体回転軸に取り付けられたエンコーダーなどで検出される。
・感光体表面からの散乱光は光センサで検出される。
【0049】
(a-6)電子写真プロセス状態
電子写真方式によるトナー像形成は、周知のように、感光体の均一帯電、レーザー光などによる潜像形成(像露光)、電荷を持ったトナー(着色粒子)による現像、転写材へのトナー像の転写(カラーの場合は中間転写体または最終転写材である記録媒体での重ね合わせ、または現像時に感光体への重ね現像を行なう)、記録媒体へのトナー像の定着という順序で行なわれる。これらの各段階での様々な情報は、画像その他のシステムの出力に大きく影響を与える。これらを取得することがシステムの安定を評価する上で重要となる。この電子写真プロセス状態のデータ取得の具体例としては、次のようなものが挙げられる。
・帯電電位、露光部電位は従来公知の表面電位センサにより検出される。
・非接触帯電における帯電部材と感光体とのギャップは、ギャップを通過させた光の量を測定することにより検知する。
・帯電による電磁波は広帯域アンテナにより捉える。
・帯電による発生音。
・露光強度。
・露光光波長。
【0050】
また、トナー像の様々な状態を取得すること方法としては、次のようなものが挙げられる。
・パイルハイト(トナー像の高さ)を、変位センサで縦方向から奥行きを、平行光のリニアセンサで横方向から遮光長を計測して求める。
・トナー帯電量を、ベタ部の静電潜像の電位、その潜像が現像された状態での電位を測定する電位センサにより測定し、同じ箇所の反射濃度センサから換算した付着量との比により求める。
・ドット揺らぎまたはチリを、ドットパターン画像を感光体上においては赤外光のエリアセンサ、中間転写体上においては各色に応じた波長のエリアセンサで検知し、適当な処理をすることにより求める。
・オフセット量(定着後)を、記録紙上と定着ローラ上の対応する場所をそれぞれ光学センサで読み取って、両者比較することにより求める。
・転写工程後(PD上,ベルト上)に光学センサを設置し,特定パターンの転写後の転写残パターンからの反射光量で転写残量を判断する。
・重ね合わせ時の色ムラを定着後の記録紙上を検知するフルカラーセンサで検知する。
【0051】
(a-7)形成されたトナー像の特性
・画像濃度、色は光学的に検知する。反射光、透過光のいずれでもよい。色に応じて投光波長を選択すればよい。濃度及び単色情報を得るには感光体上または中間転写体上でよいが、色ムラなど,色のコンビネーションを測るには紙上の必要がある。
・階調性は、階調レベルごとに感光体上に形成されたトナー像または転写体に転写されたトナー像の反射濃度を光学センサにより検出する。
・鮮鋭性は、スポット径の小さい単眼センサ、若しくは高解像度のラインセンサを用いて、ライン繰り返しパターンを現像または転写した画像を読み取ることにより求める。
・粒状性(ざらつき感)は、鮮鋭性の検出と同じ方法により、ハーフトーン画像を読み取り、ノイズ成分を算出することにより求める。
・レジストスキューは、レジスト後の主走査方向両端に光学センサを設け、レジストローラONタイミングと両センサの検知タイミングとの差異から求める。
・色ずれは、中間転写体または記録紙上の重ね合わせ画像のエッジ部を、単眼の小径スポットセンサ若しくは高解像度ラインセンサで検知する。
・バンディング(送り方向の濃度むら)は、記録紙上で小径スポットセンサ若しくは高解像度ラインセンサにより副走査方向の濃度ムラを測定し、特定周波数の信号量を計測する。
・光沢度(むら)は、均一画像が形成された記録紙を正反射式光学センサで検知するように設ける。
・かぶりは、感光体上、中間転写体上、または記録紙上において、比較的広範囲の領域を検知する光学センサで画像背景部を読み取る方法、または高解像度のエリアセンサで背景部のエリアごと画像情報を取得し、その画像に含まれるトナー粒子数を数えるという方法がある。
【0052】
(a-8)画像形成装置のプリント物の物理的な特性
・像流れや画像かすれなどは、感光体上、中間転写体、あるいは記録紙上でトナー像をエリアセンサにより検知し、取得した画像情報を画像処理して判定する。
・トナーチリ汚れは記録紙上の画像を高解像度ラインセンサまたはエリアセンサで取り込み、パターン部の周辺に散っているトナー量を算定することにより求める。
・後端白抜け、ベタクロス白抜けは、感光体上、中間転写体、あるいは記録紙上で高解像度ラインセンサにより検知する。
・記録紙のカール、波打ち、折れは、変位センサで検出する。折れの検出のためには記録紙の両端部分に近い所にセンサを設置することが有効である。
・コバ面の汚れやキズは、排紙トレイに縦に設けたエリアセンサにより,ある程度排紙が溜まった時のコバ面をエリアセンサで撮影,解析する。
【0053】
(a-9)環境状態
・温度検出には、異種金属どうし或いは金属と半導体どうしを接合した接点に発生する熱起電力を信号として取り出す熱電対方式、金属或いは半導体の抵抗率が温度によって変化することを利用した抵抗率変化素子、また、或る種の結晶では温度が上昇したことにより結晶内の電荷の配置に偏りが生じ表面に電位発生する焦電型素子、更には、温度による磁気特性の変化を検出する熱磁気効果素子などを採用することができる。
・湿度検出には、H2O或いはOH基の光吸収を測定する光学的測定法、水蒸気の吸着による材料の電気抵抗値変化を測定する湿度センサ等がある。
・各種ガスは、基本的にはガスの吸着に伴う、酸化物半導体の電気抵抗の変化を測定することにより検出する。
・気流(方向、流速、ガス種)の検出には、光学的測定法等があるが、システムへの搭載を考慮するとより小型にできるエアブリッジ型フローセンサが特に有用である。
・気圧、圧力の検出には、感圧材料を使用する、メンブレンの機械的変位を測定する等の方法がある。振動の検出にも同様に方法が用いられる。
【0054】
(b)制御パラメータデータ
複写機の動作は制御部によって決定されるため、制御部の入出力パラメータを直接利用することが有効である。
【0055】
(b-1)画像形成パラメータ
画像形成のために制御部が演算処理により出力する直接的なパラメータで、以下のような例がある。
・制御部によるプロセス条件の設定値で、例えば帯電電位、現像バイアス値、定着温度設定値など。
・同じく、中間調処理やカラー補正などの各種画像処理パラメータの設定値。
・制御部が装置の動作のために設定する各種のパラメータで、例えば紙搬送のタイミング、画像形成前の準備モードの実行時間など。
【0056】
(b-2)ユーザー操作履歴
・色数、枚数、画質指示など、ユーザーにより選択された各種操作の頻度
・ユーザーが選択した用紙サイズの頻度。
【0057】
(b-3)消費電力
・全期間または特定期間単位(1日、1週間、1ヶ月など)の総合消費電力あるいはその分布、変化量(微分)、累積値(積分)など。
【0058】
(b-4)消耗品消費情報
・全期間または特定期間単位(1日、1週間、1ヶ月など)のトナー、感光体、紙の使用量あるいはその分布、変化量(微分)、累積値(積分)など。
【0059】
(b-5)故障発生情報
・全期間または特定期間単位(1日、1週間、1ヶ月など)の故障発生(種類別)の頻度あるいはその分布、変化量(微分)、累積値(積分)など。
(b-6)動作時間情報(作動時間情報)
・複写機の動作時間を計時手段によって計時して記憶する。
(b-7)プリント動作回数(作動回数情報)
・プリントアウト1枚ごとにカウントアップしていき、そのカウント値を記憶する。
【0060】
(c)入力画像情報
ホストコンピュータから直接データとして送られる画像情報、あるいは原稿画像からスキャナーで読み取って画像処理をした後に得られる画像情報から、以下のような情報を取得することができる。
・着色画素累積数はGRB信号別の画像データを画素ごとにカウントすることにより求められる。
・例えば特許第2621879号の公報に記載されているような方法でオリジナル画像を文字、網点、写真、背景に分離し、文字部、ハーフトーン部などの比率を求めることができる。同様にして色文字の比率も求めることができる。
・着色画素の累積値を主走査方向で区切った領域別にカウントすることにより、主走査方向のトナー消費分布が求められる。
・画像サイズは制御部が発生する画像サイズ信号または画像データでの着色画素の分布により求められる。
・文字の種類(大きさ、フォント)は文字の属性データから求められる。
【0061】
次に、本複写機における各種データの具体的取得法について説明する。
(1)温度データ
本複写機は、温度の情報を取得する温度センサとして、原理及び構造が簡単でしかも超小型にできる抵抗変化素子を用いるものを備えている。
【0062】
(2)湿度データ
小型にできる湿度センサが有用である。基本原理は感湿性セラミックスに水蒸気が吸着すると、吸着水によりイオン伝導が増加しセラミックスの電気抵抗が低下することによる。感湿性セラミックスの材料は多孔質材料であり、一般的にはアルミナ系、アパタイト系、ZrO2−MgO系などが使用される。
【0063】
(3)振動データ
振動センサは、基本的には気圧及び圧力を測定するセンサと同じであり、システムへの搭載を考慮すると超小型にできるシリコン利用のセンサが特に有用である。薄いシリコンのダイアフラム上に作製した振動子の運動を、振動子と対向して設けられた対向電極間との容量変化を計測する、或いはSiダイアフラム自体のピエゾ抵抗効果を利用して計測することができる。
【0064】
(4)トナー濃度(4色分)データ
各色ごとにトナー濃度を検出してデータ化する。トナー濃度センサとしては従来より公知の方式のものを用いることができる。例えば、特開平6−289717号公報に記載されているような現像装置中の現像剤の透磁率の変化を測定するセンシングシステムにより、トナー濃度を検出することができる。
【0065】
(5)感光体一様帯電電位(4色分)データ
各色用の感光体(40K,Y,M,C)について、それぞれ一様帯電電位を検出する。物体の表面電位を検知する公知の表面電位センサを用いることができる。
【0066】
(6)感光体露光後電位(4色分)データ
光書込後の感光体(40K,Y,M,C)の表面電位を、(5)と同様にして検出する。
【0067】
(7)着色面積率(4色分)データ
入力画像情報から、着色しようとする画素の累計値と全画素の累計値の比から着色面積率を色ごとに求め、これを利用する。
【0068】
(8)現像トナー量(4色分)データ
感光体(40K,Y,M,C)上で現像された各色トナー像における単位面積あたりのトナー付着量を、反射型フォトセンサによる光反射率に基づいて求める。反射型フォトセンサは対象物にLED光を照射し、反射光を受光素子で検出するものである。トナー付着量と光反射率とには相関関係が成立するため、光反射率に基づいてトナー付着量を求めることができる。
【0069】
(9)紙先端位置の傾き
給紙部(200)の給紙ローラから2次転写ニップに至る給紙経路のどこかに、転写紙をその搬送方向に直交する方向の両端で検知する光センサ対を設置し、搬送されてくる転写紙の先端付近の両端を検出する。両光センサについて、給紙ローラの駆動信号の発信時を基準として、通過までの時間を計測し、時間のズレに基づいて送り方向に対する転写紙の傾きを求める。
【0070】
(10)排紙タイミングデータ
排出ローラ対(図1の56)を通過後の転写紙を光センサで検出する。この場合も給紙ローラの駆動信号の発信時を基準として計測する。
【0071】
(11)感光体総電流(4色分)データ
感光体(40K,Y,M,C)からアースに流れ出る電流を検出する。感光体の基板と接地端子との間に、電流測定手段を設けることで、かかる電流を検出することができる。
【0072】
(12)感光体駆動電力(4色分)
感光体の駆動源(モータ)が駆動中に費やす駆動電力(電流×電圧)を電流計や電圧計などによって検出する。
【0073】
次に、本複写機の特徴的な構成について説明する。
図5は、本複写機の制御部1によって、比較的長期間に渡って実施される長期制御における処理フローを示すフローチャートである。本複写機の制御部1は、工場から出荷された後、ユーザーのもとで使用され初めてから、所定の第1期間が経過するまでの間に、定期的に取得した上述の取得組データに基づいて正常組データ群を構築する。具体的には、本複写機は、制御パラメータである第1フラグがセットされた状態で工場から出荷される。制御部1は、この第1フラグについてセット中であるか否かを判断し、セット中である場合には(ステップ1:以下、ステップをSと記す)、次に、定期的に到来する取得タイミングの到来の有無を監視する(S2)。そして、取得タイミングが到来した場合には(S2でY)、各種センサからの出力信号などに基づいて取得組データを取得して、取得タイミングと関連付けてハードディスク内に記憶させる(S3)。次いで、必要に応じて取得組データに基づいて正常組データを構築してハードディスク内に記憶させる(S4)。これらの処理を、第1期間が経過するまで繰り返し行うことで、複数の正常組データからなる正常組データ群を構築する。第1期間が経過すると(S5でY)、第1フラグが解除されるとともに、第2フラグがセットされる(S6)。
【0074】
このようにして正常組データ群の構築が終了すると、以降は、制御フローのS1からS6までが省略されて、後述するS7以降の制御フローが実行される。そして、所定の第2期間が経過するまでの間に、故障の発生件数を予測する予測式を構築するための予測式構築用データ取得が行われる。具体的には、制御部1は、まず、第2フラグについてセット中であるか否かを判断し、セット中である場合には(S7でY)、取得タイミングの到来の有無を監視する(S8)。そして、取得タイミングが到来すると(S8でY)、取得組データを取得してハードディスク内に記憶させた後(S9)、故障の発生の有無を判断する(S10)。故障の発生があった場合には(S10でY)、発生件数を取得タイミングと関連づけてハードディスク内に記憶させる(S11)。同時に2以上の故障が発生することは少ないので、通常は発生件数「1」が取得タイミングに関連付けられて記憶されるが、「2」以上になる場合もある。また、故障の発生の有無については、センサ等によって検出可能な故障であれば制御部1が自動で検出して発生件数をハードディスク内に記憶させる。また、検出不能な故障については、ユーザーやサービスマンによる操作表示部3への入力操作に基づいて制御部1が検出して発生件数をハードディスク内に記憶させる。これらの処理を、第2期間が経過するまで繰り返し行うことで、予測式構築用のデータを取得していく。第2期間が経過すると(S12でY)、ハードディスク内に記憶されている正常組データ群と予測式構築用のデータとに基づいて予測式が構築された後(S13)、第2フラグが解除されるる(S14)。
【0075】
このようにして予測式の構築が終了すると、以降は、制御フローのS1からS14までが省略されて、後述するS15以降の制御フローが実行される。そして、以降の期間において、故障発生件数の予測が行われる。具体的には、制御部1は、取得タイミングの到来の有無を監視し(S15)、到来した場合には(S15でY)、取得組データを取得した後(S16)、現時点から所定期間が経過するまでの故障発生件数を予測式等に基づいて求める(S17)。そして、故障発生件数の予測値が「1」異常であった場合には(S18でY)、故障予測値(故障発生件数の予測値)を報知する(S19)。この報知は、操作表示部3への表示によって行われる。なお、故障発生件数の予測値にかかわらず、予測値を報知させるようにしてもよい。
【0076】
次に、上述の第1期間中における正常組データ群の構築処理について詳述する。本複写機では、例えば次の表1に示す33種類のデータからなる取得組データを、例えばp枚プリントアウト毎に(取得タイミング到来)取得する。
【表1】
【0077】
以下、この表1における種類番号を変数「j」として表して説明する。また、データをxで表し、これにjを添字として付すことで、どの種類のデータなのかを表す。たとえば、xj=1であれば、これは温度データを表すことになる。なお、pの値が小さすぎると多くのデータ記憶容量や処理時間が必要になる。また、大きすぎると取得データ数の不足による予測精度の低下が起こる。このため、pの値については、それらを勘案して適宜設定することが望ましい。
【0078】
また、本複写機の制御部1は、詳細は後述するが、必要に応じて、取得組データを取得した時点よりも所定の取得回数分だけ過去に遡ったり、所定の取得回数分だけ時間経過した未来を仮定したりして、各種の演算処理を行うようになっている。以下、取得組データの取得時点をα(α回目の取得組データの取得)で表し、且つ、前述の所定の取得回数をステップqとして説明する。
【0079】
制御部1は、本複写機がユーザーに使用され始めた時点から、初めにp枚目のプリントアウトがなされた時点で、第1番目の取得組データ(xj=1〜33)を取得する。以降、第1番目から(q−1)番目の取得組データを取得するまでは、図5におけるS4の工程を省略する。そして、第q番目の取得組データを取得した以降は、図5におけるS4の工程を実施する。この工程では、以下のようにして正常組データを構築する。
【0080】
即ち、まず、最新の第α番目の取得組データにおける33種類のデータをそれぞれ、データの1つとして正常組データ内に組み入れる。以下、これらの最新のデータをxjaと表す。このxjaを数式化すると次のようになる。
【数1】
【0081】
次いで、それら33種類の最新データについてそれぞれ、第α番目よりもq番だけ遡った時点から(α−q番目)、第α番目までにおける値の変動の傾きxjbを次式のようにして求めて、正常組データ内に組み入れる。なお、次式におけるTは、最新の取得番号αからの累積取得番号の差(以下、取得番号差という)を表している。また、Σは、取得番号差Tに関する番号の和(1〜q)を表している。
【数2】
【0082】
更に、制御部1は、33種類の最新データについてそれぞれ、第α番目よりもq番だけ遡った時点から(α−q番目)、第α番目までにおける値の変動係数(標準偏差を平均値で除算したもの)xjcを次式のようにして求めて、正常組データ内に組み入れる。なお、次式におけるσj(α)は、ステップq内におけるxjの標準偏差を表している。また、xjav(α)は、ステップq内におけるxjの平均値を表している。
【数3】
【0083】
このようにして正常組データを構築することで、そのデータ種類数は、取得組データ内のデータ種類数の3倍(33×3=99種類)になる。
【0084】
初期運転開始後、初めに構築される第1番目の正常組データは、次に掲げるデータの組合せになる。
・最新の取得組データxj(=1〜33)a(α=q)
・それぞれの取得データ(取得組データ内の1データ)についての第1番目から第q番目までの傾きデータxj(=1〜33)b(α=q)
・それぞれの取得データについての第1番目から第q番目までの変動係数データxj(=1〜33)c(α=q)
【0085】
また、第2番目の正常組データは、次に掲げるデータの組合せになる。
・最新の第α(=q+1)番目の取得組データxj(=1〜33)a(α=q+1)
・それぞれの取得データ(取得組データ内の1データ)についての第2番目から第α(=q+1)番目までの傾きデータxj(=1〜33)b(α=q+1)
・それぞれの取得データについての第2番目から第α(q+1)番目までの変動係数データxj(=1〜33)c(α=q+1)
【0086】
また、第3番目の正常組データは、次に掲げるデータの組合せになる。
・最新の第α(=q+2)番目の取得組データxj(=1〜33)a(α=q+2)
・それぞれの取得データ(取得組データ内の1データ)についての第3番目から第α(=q+2)番目までの傾きデータxj(=1〜33)b(α=q+2)
・それぞれの取得データについての第3番目から第α(q+2)番目までの変動係数データxj(=1〜33)c(α=q+2)
【0087】
このようにして正常組データをp枚プリントアウト毎に順次構築していく。これを、例えば20000枚のプリントアウトを終えるまでなど、第1期間が終了するまで繰り返すのである。
【0088】
なお、以下、取得組データと区別する目的で、正常組データをyj(=1〜99)と表すことにする。
【0089】
次に、上述の第2期間中における予測式構築用のデータの取得処理、及びその後の予測式の構築処理について詳述する。
第2期間中には、正常組データ群と同様にして、各取得時点(α)における最新の取得データと、傾きデータと、変動係数データとを構築していき、これらを正常組データ群とは別のデータテーブルに記憶する。また、図5のS10で示したように、各取得時点(α)における故障の発生の有無を判断し、故障があった場合には、取得時点(α)と関連付けてその発生件数をデータテーブルに記憶する。このデータテーブルを例示すると次の表2に示すようになる。なお、表2において、Mは、故障の発生件数を表している。また、kはデータの種類番号(k=1〜99)を表している。
【表2】
【0090】
このようなデータテーブル(以下、予測式構築用データテーブルという)を構築して第2期間が経過すると、制御部1は次に予測式を構築する。予測式の構築法の概略は次の通りである。即ち、予測式構築用データテーブル内におけるそれぞれの組データ(Mを除くyk=1〜99のデータ)について、先に構築しておいた正常組データ群を用いて多変量解析を行って、正常さ加減を示す異常判定指標値Dを求める。多変量解析としては、どのような解析法を用いてもよいが、以下、2つの方法を例にして説明する。
【0091】
まず、多変量解析の第1の例として、MTS法について説明する。
次に示す表3は、正常組データ群のデータテーブルを示している。なお、表3における組番号(i)は、第何番目に構築された正常組データであるのかを示すものである。
【表3】
【0092】
MTS法を用いる場合には、この正常組データ群に基づいて、次の表4に示すような正規化データテーブルを構築する。
【表4】
【0093】
データの正規化とは、各種データについて、その絶対値情報を変量情報に変換するための処理であり、次に示す関係式に基づいて、各種情報の正規化データが算出される。なお、次式におけるiは、n組の組データのうちの何れか1つであることを示す符号である。また、jは、k種類の情報のうちの何れか1つであることを示す符号である。
【数4】
【0094】
正規化データテーブルを構築すると、次に、各データ間における相関係数を算出する。この工程では、n組の正規化データにおいて、それぞれk種類の正規化データのうち、互いに異なる2種類が成立し得る全ての組合せ(kC2通り)について、次式に基づいて相関係数rpq(rqp)が算出される。
【数5】
【0095】
全ての組合せについての相関係数rpq(rqp)を算出したら、次に、対角要素を1、その他のp行q列の要素を相関係数rpqとした、k×k個の相関係数行列Rを構築する。この相関係数行列Rの内容を、次式に示す。
【数6】
【0096】
このような相関係数行列Rを構築したら、次に、次式で示される逆行列A=(R−1)を構築する。
【数7】
【0097】
この逆行列Aを正常組データ群として扱って、先に表2に示した予測式構築用データテーブル内におけるそれぞれの組データについて、異常判定指標値たるマハラノビス距離(md)を次式に基づいて求める。なお、次式において、Xpは上述の数1、数2、数3の何れかの処理が施された後、数4と同様の処理が行われたデータを示している。
【数8】
【0098】
図6は、正常組データ群を逆行列Aに変換するまでの一連のプロセスを示すフローチャートである。同図において、正常組データ群が構築されると(S1−1)、情報の種類(j)毎に、上述の数4の関係式に基づいた平均値と標準偏差σとが算出され、算出結果に基づいて正規化データテーブルが構築される(S1−2)。そして、正規化データテーブルに基づいて相関係数行列Rが構築された後(S1−3)、逆行列Aに変換される(S1−4)。
【0099】
図7は、逆行列Aと各種取得データとに基づいてマハラノビス距離(md)を算出する手順を示すフローチャートである。この手順では、まず、任意の状態でのk種類のデータx1、x2・・・、xkが取得される(S2−1)。データの種類はy11、y12,・・・、y1kなどに対応する。次に、上記数1の関係式に基づいて、それぞれの取得データがX1,X2,・・・,Xkといった具合に規格化される。そして、すでに構築されている逆行列Aの要素akkを用いて決められた上記数8の関係式により、マハラノビス距離(md)の二乗が算出される。図中の「Σ」は、添字pおよびqに関する総和を表している。
【0100】
このようにして求めたマハラノビス距離(md)を、異常判定指標値Dとして用いる。
【0101】
次に、多変量解析の第2例について説明する。
この第2例では、先に表3に示した正常組データ群と、そのときの状態評価値とについて、次に示す2つの関係式に基づいて平均値からの差を求めて基準化する。なお、次式におけるオーバーバー「 ̄」は、正常組データ群内におけるデータの平均値を示している。
【数9】
【数10】
【0102】
このようにして基準化を行った後のデータテーブルを次の表5に示す。
【表5】
【0103】
次いで、先に表2に示した予測式構築用データテーブルにおけるα番目の取得データxj(α)と、これに対応する状態評価値M’(α)とを、次に示す2つの関係式に基づいて同様に基準化して、先の数9の解や数10の解と関連付ける。
【数11】
【数12】
【0104】
そして、次に示す5つの関係式により、βjやηjを求める(Σは予測式構築用データテーブルにおけるαに関する和を表している)。
【数13】
【数14】
【数15】
【数16】
【数17】
【0105】
次いで、次式に基づいて、異常判定指標値Dを求める。
【数18】
【0106】
第1例や第2例のような多変量解析により、予測式構築用データテーブル内の各組データについての異常判定指標値Dを求めたら、次に、それぞれの異常判定指標値Di(=1〜n)と、それぞれに個別に対応する故障の発生件数Mi(=1〜n)(表2におけるM1、M2・・・・Mn)が比例関係にある仮定して、傾き係数β0を次式に基づいて算出する。
【数19】
【0107】
次いで、この傾き係数β0を用いて、データ取得時点αからステップqが経過した未来の時点における故障発生件数の予測値<M>を求めるための次のような予測式を構築する。
【数20】
【0108】
上述した第2期間が経過してかかる予測式を構築した制御部1は、以降、図5のS15〜S20に示したように、p枚プリントアウト毎に取得組データを取得する。そして、その取得組データと、ハードディスク内に記憶している正常組データ群とに基づいて異常判定指標値Dを求める。次いで、異常判定指標値Dと、数20に示した予測式とに基づいて、現時点から(p×ステップq)枚のプリントアウトが行われるまでの故障発生件数の予測値<M>を求める。そして、その予測値<M>を操作表示部3に表示する。
【0109】
なお、取得組データの取得タイミングとして、p枚プリントアウト毎を採用した例について説明したが、所定時間経過毎のタイミングを採用してもよい。また、異常の有無の判定結果や予測値<M>を、電話回線などの通信回線を介して保守サービス機関に送信させるようにしてもよい。
【0110】
次に、実施形態に係る複写機に、より特徴的な構成を付加した各実施例の複写機について説明する。
[第1実施例]
実施形態に係る複写機では、最新の取得組データを取得した現時点(α)から、その後p枚のプリントアウトを行う未来の時点までにおける故障発生件数の予測値<M>を求める。かかる構成では、例えば予測値<M>が「0」であった場合、即ち、異常を検出しなかった場合であっても、「あとp枚は正常にプリントアウトすることができます。」などと操作表示部3に表示して、ユーザーに安心感を与えることができる。また例えば、予測値<M>が「1.2」であった場合、即ち、異常を検出した場合には、「あとp枚のプリントアウトを行うまでに1〜2枚の異常画像が出力されてしまうことが予想されます。」、「あとp枚のプリントアウトを行うまでに1〜2枚の致命的な紙詰まりが発生するおそれがあります。」、「あとp枚のプリントアウトを行うまでに原因不明の故障が1〜2件発生することが予想されます。サービスマンに連絡して下さい。」などといった情報を操作表示部3に表示して、ユーザーに故障発生までの余裕度を知らせることができる。
【0111】
しかしながら、「あとp枚のプリントアウトを行うまで」の期間について、ユーザーによってはどの程度の時間なのかを把握することが困難な場合がある。そこで、本第1実施例に係る複写機においては、次のような制御を実施させるように、制御部1を構成している。即ち、p枚毎というタイミングの代わりに、p時間経過毎というタイミングを、上述の取得タイミングとして採用している。このような取得タイミングでは、予測値<M>が「あとp×q時間経過するまで」における故障発生件数として求められる。そこで、画像形成手段の累積稼働時間を計時しつつ、1日あたりにおける平均稼働時間を演算し、p×q時間を演算結果で除算する制御を実施するように制御部1を構成している。かかる構成では、「あと何日経過するまでに」といった具合に、故障が発生するまでの期間を日数で知らせることで、故障発生までの余裕度をユーザーにより正確に把握させることができる。
【0112】
[第2実施例]
本第2実施例に係る複写機においては、次のような制御を実施させるように、制御部1を構成している。画像形成手段の累積プリントアウト枚数を計数しつつ、1日あたりにおける平均プリント枚数を演算し、p×q枚を演算結果で除算する制御を実施するように制御部1を構成している。かかる構成においても、「あと何日経過するまでに」といった具合に、故障が発生するまでの期間を日数で知らせることで、故障発生までの余裕度をユーザーにより正確に把握させることができる。
【0113】
次に、実施形態に係る複写機の変形例装置について説明する。この変形例装置においては、正常組データ群の構築と、予測式の構築とを同じ期間中に実施する点が、実施形態に係る複写機と異なっている。具体的には、初期運転開始から所定時間が経過するまでの第1期間中において、所定の取得タイミング毎に取得組データを取得して、仮データテーブルに順次格納していく。この際、故障の発生を検知したり、故障が発生した旨の情報が操作表示部3に入力されたりした場合には、その時点からステップqだけ遡った時点から、その時点までに取得された取得組データを仮データテーブルから、上述の予測式構築用データテーブルに移す。同時に、その予測式構築用データテーブルに故障の発生件数のデータを入力する。そして、第1期間が経過すると、上記仮データテーブルに基づいて正常組データ群を構築する。また、予測式構築用データテーブルに基づいて、故障発生件数の予測式を構築する。
【0114】
このようにして正常組データ群と予測式とを構築したら、それ以降の第2期間中において、取得組データや予測式などに基づいて、故障発生件数の予測を行う。
【0115】
以上、実施形態に係る複写機においては、正常組データとして、複数種類の取得データ及びこれらにそれぞれ個別に対応する複数の傾きデータ(Xjb(α))の他に、それら取得データについてそれぞれ、取得時点よりも過去に所定の取得回数分だけ遡った時点から取得時点αまでの間における変動係数データ(Xjc(α))を含んでいるものをデータ記憶手段たるハードディスクに記憶させている。そして、データ取得手段たる制御部1によって取得された最新の取得組データ(Xjb(α))と、ハードディスクに記憶されている過去の取得組データとに基づいて、取得組データ内の各取得データのそれぞれについて傾きデータ及び変動係数データを演算する。更に、演算結果と、最新の取得組データと、正常組データ群とに基づいて異常判定指標値Dを演算する。かかる構成では、正常組データ群に含める取得組データ以外のデータとして、傾きデータだけを含める場合に比べて、異常発生件数の予測値<M>をより正確に予測することができる。
【0116】
また、実施形態に係る複写機においては、故障発生件数を計数する計数手段として制御部1を機能させている。そして、所定の第1期間中に取得された取得組データに基づいて正常組データ群を構築させ、その後の第2期間中に取得された上記取得組データと、制御部1よって計数された故障発生件数とに基づいて傾き係数β0を演算させ、且つ、その後の第3期間である第2期間経過後に取得された取得組データと、これに基づく傾きデータと、正常組データ群とに基づいて演算した異常判定指標値Dに、所定の係数たる(1/傾き係数β0)を乗ずることで予測値<M>を求めさせるようにしている。かかる構成では、正常組データ群の構築と、その後の予測式の構築と、更にその後の異常判定や予測値の予測とを自動で行わせることができる。
【0117】
また、変形例装置においては、故障発生件数を計数する計数手段として制御部1を機能させている。そして、所定の第1期間中にデータ取得手段によって取得された取得組データに基づいて正常組データ群を構築させるとともに、取得組データと制御部1によって計数した故障発生件数とに基づいて傾き係数β0を演算させ、且つ、その後の第2期間中にデータ取得手段によって取得された上記取得組データと、これに基づく傾きデータと、正常組データ群とに基づいて演算した異常判定指標値Dに、所定の係数たる(1/傾き係数β0)を乗ずることで予測値<M>を求めさせるようにしている。かかる構成においても、正常組データ群の構築と、その後の予測式の構築と、更にその後の異常判定や予測値の予測とを自動で行わせることができる。
【0118】
また、第1実施例に係る複写機においては、画像形成手段の1日あたりにおける平均稼働時間に基づいて、最新の取得組データを取得した時点(α)から所定回数分(ステップq)のデータ取得を行う未来の時点までの期間を補正する補正手段として制御部1を機能させている。そして、予測値<M>を補正後の期間における故障の発生件数の予測値として報知するように報知手段として、制御部1及び操作表示部3の組合せを機能させている。かかる構成では、予測値<M>を、単に、取得時点(α)からステップqが経過するまでの期間における故障発生件数の予測値としてユーザーに報知する場合に比べて、ユーザーに対して、取得時点(α)から故障が発生するまでの余裕度合いをより正確に把握させることができる。
【0119】
また、第2実施例に係る複写機においては、画像形成手段の1日あたりにおける記録部材の平均出力数である1日平均プリント枚数に基づいて、最新の取得組データを取得した時点(α)から所定回数分(ステップq)のデータ取得を行う未来の時点までの期間を補正する補正手段として、制御部1を機能させている。そして、予測値<M>を、補正後の期間における故障の発生件数の予測値として報知する報知手段として、制御部1及び操作表示部3の組合せを機能させている。かかる構成においても、予測値<M>を、単に、取得時点(α)からステップqが経過するまでの期間における故障発生件数の予測値としてユーザーに報知する場合に比べて、ユーザーに対して、取得時点(α)から故障が発生するまでの余裕度合いをより正確に把握させることができる。
【図面の簡単な説明】
【0120】
【図1】実施形態に係る複写機を示す概略構成図。
【図2】同複写機のプリンタ部を示す概略構成図。
【図3】同複写機のタンデム部を示す部分拡大図。
【図4】同複写機の電気回路の一部を示すブロック図。
【図5】同本複写機の制御部によって、比較的長期間に渡って実施される長期制御における処理フローを示すフローチャート。
【図6】正常組データ群を逆行列に変換するまでの一連のプロセスを示すフローチャート。
【図7】逆行列と各種取得データとに基づいてマハラノビス距離を算出する手順を示すフローチャート。
【符号の説明】
【0121】
1:制御部(データ取得手段の一部、報知手段の一部、指標値演算手段、データ記憶手段、記憶制御手段、計数手段、補正手段)
2:各種センサ(データ取得手段の一部)
3:操作表示部(データ取得手段の一部、報知手段の一部)
100:プリンタ部(画像形成手段の一部)
200:給紙部(画像形成手段の一部)
【特許請求の範囲】
【請求項1】
記録部材に画像を形成する画像形成手段と、画像形成手段から複数種類のデータを取得するデータ取得手段と、互いに正常な値の該複数種類のデータを含む正常組データの集まりである正常組データ群を記憶するデータ記憶手段と、該データ取得手段によって取得された複数種類のデータからなる取得組データ、及び該データ記憶手段に記憶されている正常組データ群に基づいて異常判定指標値を演算する指標値演算手段とを備える画像形成装置において、
上記データ取得手段によって取得された上記取得組データを所定のタイミングが到来する毎に上記データ記憶手段に順次記憶させていく記憶制御手段を設け、
上記正常組データとして、上記複数種類のデータの他に、それらデータについてそれぞれ、取得時点よりも過去に所定の取得回数分だけ遡った時点から該取得時点までの間における値の変動の傾きデータを含んでいるものを上記データ記憶手段に記憶させ、
且つ、上記データ取得手段によって取得された最新の上記取得組データと、上記データ記憶手段に記憶されている過去の上記取得組データとに基づいて、取得組データ内の上記複数種類のデータのそれぞれについて上記傾きデータを演算した後、この演算結果と、該最新の取得組データと、上記正常組データ群とに基づいて上記異常判定指標値を演算するように上記指標値演算手段を構成したことを特徴とする画像形成装置。
【請求項2】
請求項1の画像形成装置において、
上記正常組データとして、上記複数種類のデータ及びこれらにそれぞれ個別に対応する複数の上記傾きデータの他に、該複数種類のデータについてそれぞれ、取得時点よりも過去に所定の取得回数分だけ遡った時点から該取得時点までの間における変動係数データを含んでいるものを上記データ記憶手段に記憶させ、
且つ、上記データ取得手段によって取得された最新の上記取得組データと、上記データ記憶手段に記憶されている過去の上記取得組データとに基づいて、取得組データ内の上記複数種類のデータのそれぞれについて上記傾きデータ及び変動係数データを演算した後、演算結果と、該最新の取得組データと、上記正常組データ群とに基づいて上記異常判定指標値を演算するように上記指標値演算を構成したことを特徴とする画像形成装置。
【請求項3】
請求項1又は2の画像形成装置において、
故障発生件数を計数する計数手段を設け、
所定の第1期間中に上記データ取得手段によって取得された上記取得組データに基づいて上記正常組データ群を構築させ、その後の第2期間中に該データ取得手段によって取得された上記取得組データと、該計数手段によって計数された故障発生件数とに基づいて所定の係数を演算させ、且つ、その後の第3期間中に該データ取得手段によって取得された上記取得組データと、これに基づく上記傾きデータと、該正常組データ群とに基づいて演算した上記異常判定指標値に該所定の係数を乗ずることで、上記最新の取得組データを取得した時点から上記所定回数分のデータ取得を行う未来の時点までにおける故障の発生件数の予測値を求めさせるようにしたことを特徴とする画像形成装置。
【請求項4】
請求項1又は2の画像形成装置において、
故障発生件数を計数する計数手段を設け、
所定の第1期間中に上記データ取得手段によって取得された上記取得組データに基づいて上記正常組データ群を構築させるとともに、該取得組データと該計数手段によって計数された故障発生件数とに基づいて所定の係数を演算させ、且つ、その後の第2期間中に該データ取得手段によって取得された上記取得組データと、これに基づく上記傾きデータと、該正常組データ群とに基づいて演算した上記異常判定指標値に該所定の係数を乗ずることで、上記最新の取得組データを取得した時点から上記所定回数分のデータ取得を行う未来の時点までにおける故障の発生件数の予測値を求めさせるようにしたことを特徴とする画像形成装置。
【請求項5】
請求項3又は4の画像形成装置において、
上記画像形成手段の1日あたりにおける平均稼働時間に基づいて、上記最新の取得組データを取得した時点から上記所定回数分のデータ取得を行う未来の時点までの期間を補正する補正手段を設けるとともに、上記発生件数を補正後の期間における故障の発生件数の予測値として報知するように報知手段を設けたことを特徴とする画像形成装置。
【請求項6】
請求項3又は4の画像形成装置において、
上記画像形成手段の1日あたりにおける記録部材の平均出力数に基づいて、上記最新の取得組データを取得した時点から上記所定回数分のデータ取得を行う未来の時点までの期間を補正する補正手段を設けるとともに、上記発生件数を補正後の期間における故障の発生件数の予測値として報知する報知手段を設けたことを特徴とする画像形成装置。
【請求項1】
記録部材に画像を形成する画像形成手段と、画像形成手段から複数種類のデータを取得するデータ取得手段と、互いに正常な値の該複数種類のデータを含む正常組データの集まりである正常組データ群を記憶するデータ記憶手段と、該データ取得手段によって取得された複数種類のデータからなる取得組データ、及び該データ記憶手段に記憶されている正常組データ群に基づいて異常判定指標値を演算する指標値演算手段とを備える画像形成装置において、
上記データ取得手段によって取得された上記取得組データを所定のタイミングが到来する毎に上記データ記憶手段に順次記憶させていく記憶制御手段を設け、
上記正常組データとして、上記複数種類のデータの他に、それらデータについてそれぞれ、取得時点よりも過去に所定の取得回数分だけ遡った時点から該取得時点までの間における値の変動の傾きデータを含んでいるものを上記データ記憶手段に記憶させ、
且つ、上記データ取得手段によって取得された最新の上記取得組データと、上記データ記憶手段に記憶されている過去の上記取得組データとに基づいて、取得組データ内の上記複数種類のデータのそれぞれについて上記傾きデータを演算した後、この演算結果と、該最新の取得組データと、上記正常組データ群とに基づいて上記異常判定指標値を演算するように上記指標値演算手段を構成したことを特徴とする画像形成装置。
【請求項2】
請求項1の画像形成装置において、
上記正常組データとして、上記複数種類のデータ及びこれらにそれぞれ個別に対応する複数の上記傾きデータの他に、該複数種類のデータについてそれぞれ、取得時点よりも過去に所定の取得回数分だけ遡った時点から該取得時点までの間における変動係数データを含んでいるものを上記データ記憶手段に記憶させ、
且つ、上記データ取得手段によって取得された最新の上記取得組データと、上記データ記憶手段に記憶されている過去の上記取得組データとに基づいて、取得組データ内の上記複数種類のデータのそれぞれについて上記傾きデータ及び変動係数データを演算した後、演算結果と、該最新の取得組データと、上記正常組データ群とに基づいて上記異常判定指標値を演算するように上記指標値演算を構成したことを特徴とする画像形成装置。
【請求項3】
請求項1又は2の画像形成装置において、
故障発生件数を計数する計数手段を設け、
所定の第1期間中に上記データ取得手段によって取得された上記取得組データに基づいて上記正常組データ群を構築させ、その後の第2期間中に該データ取得手段によって取得された上記取得組データと、該計数手段によって計数された故障発生件数とに基づいて所定の係数を演算させ、且つ、その後の第3期間中に該データ取得手段によって取得された上記取得組データと、これに基づく上記傾きデータと、該正常組データ群とに基づいて演算した上記異常判定指標値に該所定の係数を乗ずることで、上記最新の取得組データを取得した時点から上記所定回数分のデータ取得を行う未来の時点までにおける故障の発生件数の予測値を求めさせるようにしたことを特徴とする画像形成装置。
【請求項4】
請求項1又は2の画像形成装置において、
故障発生件数を計数する計数手段を設け、
所定の第1期間中に上記データ取得手段によって取得された上記取得組データに基づいて上記正常組データ群を構築させるとともに、該取得組データと該計数手段によって計数された故障発生件数とに基づいて所定の係数を演算させ、且つ、その後の第2期間中に該データ取得手段によって取得された上記取得組データと、これに基づく上記傾きデータと、該正常組データ群とに基づいて演算した上記異常判定指標値に該所定の係数を乗ずることで、上記最新の取得組データを取得した時点から上記所定回数分のデータ取得を行う未来の時点までにおける故障の発生件数の予測値を求めさせるようにしたことを特徴とする画像形成装置。
【請求項5】
請求項3又は4の画像形成装置において、
上記画像形成手段の1日あたりにおける平均稼働時間に基づいて、上記最新の取得組データを取得した時点から上記所定回数分のデータ取得を行う未来の時点までの期間を補正する補正手段を設けるとともに、上記発生件数を補正後の期間における故障の発生件数の予測値として報知するように報知手段を設けたことを特徴とする画像形成装置。
【請求項6】
請求項3又は4の画像形成装置において、
上記画像形成手段の1日あたりにおける記録部材の平均出力数に基づいて、上記最新の取得組データを取得した時点から上記所定回数分のデータ取得を行う未来の時点までの期間を補正する補正手段を設けるとともに、上記発生件数を補正後の期間における故障の発生件数の予測値として報知する報知手段を設けたことを特徴とする画像形成装置。
【図1】

【図2】

【図3】
【図4】
【図5】
【図6】
【図7】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2007−256356(P2007−256356A)
【公開日】平成19年10月4日(2007.10.4)
【国際特許分類】
【出願番号】特願2006−77290(P2006−77290)
【出願日】平成18年3月20日(2006.3.20)
【出願人】(000006747)株式会社リコー (37,907)
【Fターム(参考)】
【公開日】平成19年10月4日(2007.10.4)
【国際特許分類】
【出願日】平成18年3月20日(2006.3.20)
【出願人】(000006747)株式会社リコー (37,907)
【Fターム(参考)】
[ Back to top ]