
画像形成装置
【課題】 像担持体に対する露光装置の位置決め状態に与える振動や物流及び長期使用の影響を小さくする。
【解決手段】 画像形成装置は、像担持体1と、像担持体の長手方向Xに並んで設けられ像担持体の表面を露光するために画像情報に従って発光する複数個の発光素子を有する露光装置5と、露光装置の長手方向の両端部のそれぞれにおいて像担持体に対して露光装置を位置決めする第一位置決め部材61、62と、第一位置決め部材の位置決め状態を保持するために露光装置を像担持体へ向けて付勢する第一弾性部材71、72と、第一位置決め部材の間の取付部5bで露光装置を保持する保持部材10と、取付部において像担持体に対して露光装置を位置決めするために、像担持体に対して保持部材を位置決めする第二位置決め部材91、92と、第二位置決め部材の位置決め状態を保持するために保持部材を像担持体へ向けて付勢する第二弾性部材12とを有する。
【解決手段】 画像形成装置は、像担持体1と、像担持体の長手方向Xに並んで設けられ像担持体の表面を露光するために画像情報に従って発光する複数個の発光素子を有する露光装置5と、露光装置の長手方向の両端部のそれぞれにおいて像担持体に対して露光装置を位置決めする第一位置決め部材61、62と、第一位置決め部材の位置決め状態を保持するために露光装置を像担持体へ向けて付勢する第一弾性部材71、72と、第一位置決め部材の間の取付部5bで露光装置を保持する保持部材10と、取付部において像担持体に対して露光装置を位置決めするために、像担持体に対して保持部材を位置決めする第二位置決め部材91、92と、第二位置決め部材の位置決め状態を保持するために保持部材を像担持体へ向けて付勢する第二弾性部材12とを有する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、像担持体を露光する複数の発光素子が設けられた発光部材を有する画像形成装置に関する。
【背景技術】
【0002】
従来、電子写真方式におけるデジタル複写機やプリンタ等の画像形成装置において、露光光源として、一般的に半導体レーザを用いている。半導体レーザから射出された光ビームは、回転多面鏡を有する光偏向器により偏向される。偏向された光ビームは、fθレンズを介して感光体ドラムの表面の上に結像され、走査されて、感光体ドラムの表面の上に静電潜像を形成する。
【0003】
一方、近年では、露光光源として発光ダイオードアレイ(以下、LEDアレイという。)を用いた画像形成装置が多く現れるようになった。LEDアレイは、列状に並べて配列された複数個の発光ダイオード(以下、LEDという。)を有する。LEDアレイは、LEDヘッドに保持されている。LEDアレイから射出された複数個の光ビームは、ロッドレンズアレイを介して感光体ドラムの表面上にそれぞれ結像され、感光体ドラムの表面の上に静電潜像を形成する。
【0004】
一般的に、LEDアレイの共役長は、10mm前後である。LEDアレイは、焦点距離が比較的長いレーザ光学系と比べて、感光体ドラムの表面に対する焦点位置の光軸方向のずれの影響を受けやすい光学系である。したがって、像担持体としての感光体ドラムとLEDアレイを保持するLEDヘッドとの間の距離を精度よく一定に維持する必要がある。
【0005】
特許文献1は、感光体ドラムとLEDヘッドとの間の距離をモータにより自動調整する自動調整手段と、記録媒体に記録された計測パターンの濃度を測定して結像位置のずれ量を計測する計測手段とを有する画像形成装置を開示している。計測手段の計測結果に基づいて、自動調整手段は、LEDヘッドの両端部に設けられた調整部材を変位させることにより、LEDヘッドと感光体ドラムとの間の距離を調整する。特許文献1によれば、これによって、高精度にかつ経時変化の影響を受けることなく、LEDヘッドを位置決めすることができる。
【0006】
また、特許文献1の画像形成装置は、LEDヘッドの長手方向の中央部を押圧してLEDヘッドと像担持体との間の距離を調整する押圧手段を有している。LEDヘッドの初期形状は、長手方向の中央部が端部に比べて像担持体から離れた凸形状をしている。押圧手段は、LEDヘッドの中央部の押圧力を調整することにより、LEDヘッドと像担持体との間の距離を調整する。これによって、幅の広いLEDヘッドであっても、LEDプリントヘッドの全幅に亘り高精度に位置決めして、LEDヘッドを画像形成装置に取り付けることができる。
【先行技術文献】
【特許文献】
【0007】
【特許文献1】特開2005−335074号公報
【発明の概要】
【発明が解決しようとする課題】
【0008】
しかしながら、LEDヘッドと像担持体との距離を、露光幅の全域に亘り高精度に位置決めし、長期に亘ってそれを保証することは大変難しい。特許文献1に記載された構成では、初期は組立時の調整を経て高精度に位置決めすることができても、その後に生じる振動や物流及び長期使用の影響により位置決め状態を高精度に保持することができないことがある。
【課題を解決するための手段】
【0009】
上記課題を解決するために、本発明による画像形成装置は、像担持体と、前記像担持体の長手方向に並んで設けられ前記像担持体の表面を露光するために画像情報に従って発光する複数個の発光素子を有する露光装置と、前記露光装置の長手方向の両端部に設けられ、前記両端部のそれぞれにおいて前記像担持体に対して前記露光装置を位置決めする第一位置決め部材と、前記第一位置決め部材の位置決め状態を保持するために前記露光装置を前記像担持体へ向けて付勢する第一弾性部材と、前記露光装置の前記第一位置決め部材の間の取付部で前記露光装置を保持する保持部材と、前記保持部材に設けられ、前記取付部において前記像担持体に対して前記露光装置を位置決めするために、前記像担持体に対して前記保持部材を位置決めする第二位置決め部材と、前記第二位置決め部材の位置決め状態を保持するために前記保持部材を前記像担持体へ向けて付勢する第二弾性部材とを有する。
【発明の効果】
【0010】
本発明によれば、露光装置の長手方向の全域に亘り露光装置を像担持体に対して高精度に位置決めすることができるとともに、振動や物流及び長期使用が位置決め状態に与える影響を小さくすることができる。
【図面の簡単な説明】
【0011】
【図1】本発明の実施例1による画像形成装置の概略断面図。
【図2】LEDヘッドの斜視図。
【図3】ロッドレンズアレイの部分断面斜視図。
【図4】ロッドレンズの説明図。
【図5】変調伝達関数(MTF)による評価の説明図。
【図6】スポットプロファイルを示す図。
【図7】感光体ドラムの特性と現像特性を示す図。
【図8】画像出力信号に対するトナー濃度の関係を示す図。
【図9】孤立ドットの潜像と複数ドットの潜像の表面電位を示す図。
【図10】実施例1による感光体ドラムに対してLEDヘッドを位置決めする位置決め部の斜視図。
【図11】実施例2による感光体ドラムに対してLEDヘッドを位置決めする位置決め部を示す図。
【図12】(a)はデフォーカス量と粒状度の関係を示す図、(b)はデフォーカス量と光強度の関係を示す図。
【図13】従来技術による倍率補正方法の説明図。
【図14】LEDヘッドの回転により生じる結像位置のずれの説明図。
【図15】(a)はLEDヘッドの端部の揺動量と全体倍率補正量の関係を示す図、(b)はLEDヘッドの端部の揺動量と結像位置のずれ量の関係を示す図。
【図16】全体倍率補正量と結像位置のずれ量の関係を示す図。
【図17】実施例3による感光体ドラムに対してLEDヘッドを位置決めする位置決め部の斜視図。
【図18】実施例3による結像位置のずれ防止の説明図。
【発明を実施するための形態】
【0012】
以下、本発明を実施するための形態を添付図面に基づき説明する。
【実施例1】
【0013】
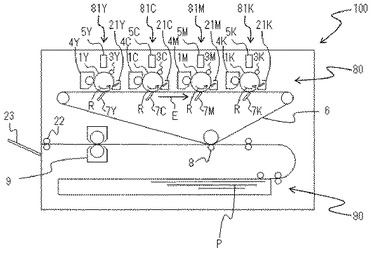
図1は、本発明の実施例1による画像形成装置100の概略断面図である。画像形成装置100は、画像形成部80と、画像形成部80へシート(記録媒体)Pを給送する給送部90とを有する。
【0014】
画像形成部80は、タンデムに配列された4つの画像形成ステーション81(81Y、81C、81M、81K)と、中間転写ベルト(中間転写体)6と、定着装置9とを有する。画像形成ステーション81のそれぞれは、感光体ドラム(像担持体)1(1Y、1C、1M、1K)を有する。感光体ドラム1は、矢印Rで示す方向に回転する。感光体ドラム1の周りには、帯電装置3、LEDヘッド(露光装置)5、現像装置4、一次転写部材7、及びクリーニング装置21が設けられている。
【0015】
帯電装置3(3Y、3C、3M、3K)は、感光体ドラム1(1Y、1C、1M、1K)の表面を均一に帯電する。LEDヘッド5(5Y、5C、5M、5K)は、均一に帯電された感光体ドラム1の表面を入力画像信号に従って露光し、感光体ドラム1の表面に静電潜像を形成する。現像装置4(4Y、4C、4M、4K)は、感光体ドラム1の表面の静電潜像を現像剤(トナー)で現像してトナー像にする。
【0016】
現像装置4Yは、イエロー現像剤(イエロートナー)を有する。現像装置4Yは、感光体ドラム1Yの表面にイエロートナー像を形成する。現像装置4Cは、シアン現像剤(シアントナー)を有する。現像装置4Cは、感光体ドラム1Cの表面にシアントナー像を形成する。現像装置4Mは、マゼンタ現像剤(マゼンタトナー)を有する。現像装置4Mは、感光体ドラム1Mの表面にマゼンタトナー像を形成する。現像装置4Kは、ブラック現像剤(ブラックトナー)を有する。現像装置4Kは、感光体ドラム1Kの表面にブラックトナー像を形成する。
【0017】
中間転写ベルト6は、感光体ドラム1に接触して矢印Eで示す方向に回転する。
一次転写部材7(7Y、7C、7M、7K)は、感光体ドラム1の表面のトナー像を中間転写ベルト6の上へ転写する。シアントナー像は、中間転写ベルト6の上のイエロートナー像の上に重ね合わされる。マゼンタトナー像は、シアントナー像の上に重ね合わされる。ブラックトナー像は、マゼンタトナー像の上に重ね合わされる。
中間転写ベルト6の上に順次重ね合わされた4つのトナー像は、給送部90から給送されたシートPの上へ二次転写ローラ8により転写される。
シートPの上のトナー像は、定着装置9によりシートに定着されシートPの上に画像が形成される。画像が形成されたシートPは、排出ローラ22により排出トレイ23の上に排出される。
【0018】
次に、図2を参照して、実施例1の画像形成装置100に用いられるLEDヘッド5を詳細に説明する。
【0019】
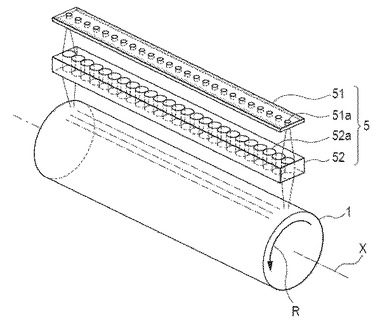
図2は、LEDヘッド5の斜視図である。図2に示すように、感光体ドラム1は、軸線Xを中心として矢印Rで示す方向に回転する。
【0020】
LEDヘッド5は、感光体ドラム1の軸線Xと平行な長手方向に延在する細長い形状を有する。LEDヘッド5は、LEDアレイ(発光素子アレイ)51と、ロッドレンズアレイ(結像素子アレイ)52とを有する。
【0021】
LEDアレイ51は、感光体ドラム1の軸線Xに沿って並べて配置された複数個のLED(発光素子)51aを有する。実施例1において、複数のLED51aは、直線状に配置されている。すなわち、LEDヘッド5は、感光体ドラム1の軸線(長手方向)Xに並んで設けられ、感光体ドラム1の表面を露光するために画像情報に従って発光する複数個のLED51aを有する。
【0022】
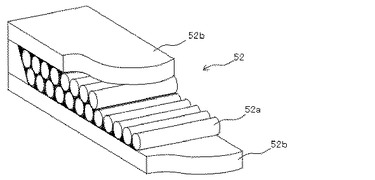
ロッドレンズアレイ52は、感光体ドラム1の軸線Xに沿って並べて配置された複数のロッドレンズ(結像素子)52aを有する。図3は、ロッドレンズアレイ52の部分断面斜視図である。ロッドレンズアレイ52は、2枚の板52bの間に、2列で直線状に配置された複数のロッドレンズ52aを有する。ロッドレンズ52aは、正立等倍結像レンズである。ロッドレンズ52aは、LED51aから射出された光を集光して感光体ドラム1の表面の上に等倍で結像する。実施例1では、LEDアレイ51とロッドレンズアレイ52とを一体化して、露光光源としてのLEDヘッド5を構成している。
【0023】
感光体ドラム1を矢印Rで示す方向に回転させながら、LEDアレイ51の複数のLED51aを選択的に発光させることにより、感光体ドラム1の表面に2次元的な静電潜像を形成する。
【0024】
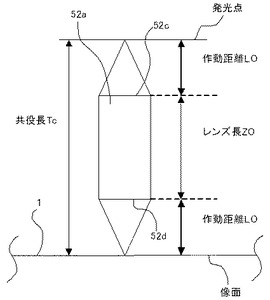
図4は、ロッドレンズ52aの説明図である。図4において、物体としてのLED(発光点)からロッドレンズ52aの端面52cまでの作動距離をL0とする。ロッドレンズ52aの長さをZ0とする。感光体ドラム1の表面(像面)からロッドレンズ52aの端面52dまでの作動距離をL0とする。ロッドレンズ52aの共役長Tcは、Tc=Z0+2×L0で表される。
【0025】
ロッドレンズアレイ52の画像伝送特性は、送られる画像の質、つまり解像力で評価される。画像伝送特性は、変調伝達関数(Modulation Transfer Function(以下、MTFという。))により評価される。
【0026】
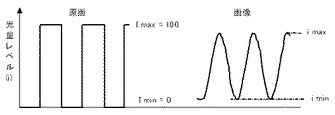
図5は、MTFによる評価の説明図である。MTFは、例えば、図5に示す矩形波パターン像の原画がロッドレンズアレイ52を通して形成された場合に、形成された画像がどの程度原画に忠実に再現できているかを示す指標である。図5の画像におけるMTFの値は、次のように定義される。
MTF(w)=(i(w)max−i(w)min)/(i(w)max+i(w)min)×100%
ここで、i(w)max、i(w)minは、各々、空間周波数w(lp/mm)における矩形波応答の極大値、極小値を示す。MTFの値が、100%に近いほど原画に忠実に画像が再現されていることになる。
【0027】
MTFの値は、ロッドレンズアレイ52の焦点位置で測定した場合と、焦点位置からずれて測定した場合とで、大きく異なる。また、ロッドレンズ52aの共役長Tcは、一般的に、10mm前後であるので、焦点距離の比較的長いレーザ光学系と比べて、LEDヘッド5は、焦点位置のずれの影響を受けやすい。したがって、感光体ドラム1とLEDヘッド5との間の距離を常に一定に維持する必要がある。
【0028】
実施例1において、LEDアレイ51は、600dpiの素子密度(解像度)を有する。LEDの電極サイズは、約20マイクロメートル(μm)である。実施例1において、ロッドレンズ52aの直径は約0.6ミリメートル(mm)である。図3に示すように、ロッドレンズアレイ52には、複数のロッドレンズ52aが2列に配置されている。
【0029】
このとき、ロッドレンズアレイ52の共役長Tcは、約9.9ミリメートルである。図4に示すように、共役長Tcは、発光点から像面までの距離である。
しかし、LED(発光点)51aと感光体ドラム1の表面(像面)との間の距離は、さまざまな因子により変動しやすい。
例えば、LEDヘッド5の反り、組み立て時の位置決め誤差、環境変化や物流に伴うLEDヘッド5の変形や位置ずれ等の影響により、LED(発光点)51aと感光体ドラム1の表面(像面)との間の距離は、変動する。
【0030】
実施例1において、良好な画像を得るために、距離の変動の許容範囲は、9.9ミリメートル±50マイクロメートルとする。この許容範囲は、特開2004−240112号公報に記載されているように、一般的な数値である。
【0031】
LED(発光点)51aと感光体ドラム1の表面(像面)との間の距離の変動が許容範囲を超えると、がさついた低画質の画像が出力されることが多くなる。このがさつき感(粒状感)は、MTFの値が低くなりスポットプロファイルが変化することにより生じる。
【0032】
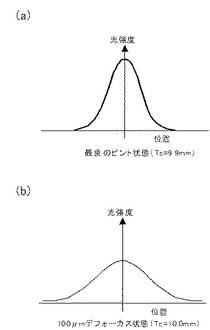
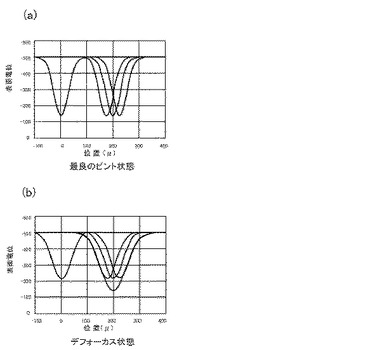
図6は、スポットプロファイルを示す図である。
図6(a)は、最良のピント状態におけるスポットプロファイルを示す図である。図6(a)において、LED(発光点)51aと感光体ドラム1の表面(像面)との間の距離は、9.9ミリメートルの共役長Tcである。図6(a)は、理想的な結像面におけるスポットプロファイルを示している。
図6(b)は、デフォーカス状態におけるスポットプロファイルを示す図である。図6(b)において、LED(発光点)51aと感光体ドラム1の表面(像面)との間の距離は、10.0ミリメートルである。図6(b)は、理想的な結像面から100マイクロメートルだけ離れた位置でのスポットプロファイルを示している。理想的な結像面から100マイクロメートルだけ離れた位置でのスポットプロファイルは、光強度が低く、スポットの両端部が広がった分布を示す。
【0033】
光量が低下した場合の影響を以下に説明する。
図7は、感光体ドラム1の特性と現像特性を示す図である。
【0034】
図7(a)は、光量に対する感光体ドラム1の表面電位の関係を示す図である。図7(a)からわかるように、光量が低い領域において、光量の増大に伴い感光体ドラム1の表面電位が急激に減少する。つまり、感光体ドラム1は、光量が低い領域において光量の変化に対して感光体ドラム1の表面電位の変化が大きいという特性を有している。
図7(b)は、電子写真方式の画像形成において、現像コントラスト電位に対するトナー濃度の関係を示す図である。図7(b)からわかるように、現像コントラスト電位が中程度の領域において、現像コントラスト電位の増大に伴い濃度が急激に増大する。つまり、中程度の現像コントラスト電位において現像コントラスト電位の変化に対して濃度の変化が大きい。このため、中程度の現像コントラスト電位において、画質の劣化した画像が形成されやすい。
よって、振動、物流、耐久等の外乱の影響によりLED51aと感光体ドラム1の表面との間の距離が変動することを防止する必要がある。
【0035】
最良のピント状態とデフォーカス状態とにおけるプリンタ出力特性を以下に説明する。
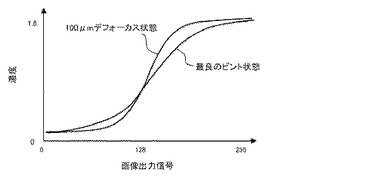
図8は、画像出力信号に対するトナー濃度の関係を示す図である。図8は、図6のスポットプロファイルと、感光体ドラム1の露光強度に対する電位減衰量を示す特性であるE−V特性と、現像装置4に印加される現像バイアスの直流電位と潜像電位との差分であるV−D特性とに基づいて得られたプリンタ出力特性を示す。
【0036】
デフォーカス状態におけるプリンタ出力特性が最良のピント状態におけるプリンタ出力特性と異なる原因を以下に説明する。
図9は、孤立ドットの潜像と複数ドットの潜像の表面電位を示す図である。図9は、図6のスポットプロファイルと、上記E−V特性と、V−D特性とに基づいて得られた孤立ドット及び複数ドットの潜像の表面電位を模式的に示す。
【0037】
図9(a)は、最良のピント状態における感光体ドラム1の表面の孤立ドットと複数ドットの潜像の表面電位を示す図である。最良のピント状態においては、孤立ドットも複数ドットもドットごとに再現される。
図9(b)は、デフォーカス状態における感光体ドラム1の表面の孤立ドットと複数ドットの潜像の表面電位を示す図である。
【0038】
デフォーカス状態においては光強度が弱く幅広な潜像が形成されるため、孤立ドットが再現されずに複数ドットが重なった位置にドットが再現される。この結果、プリンタ出力特性としては、ハイライト部の濃度は低く、ドットの重なりが現れる中間調で急激に濃度が増大するため、画像出力信号に対する濃度の変化が大きく(カーブの勾配が急峻)なる。したがって、デフォーカス状態においては、階調数、安定性に問題が生じてしまう。
また、孤立ドットは再現されず、ドットが重なった位置のみでドットが再現されるため、孤立ドットと複数ドットが混在する中間調ではガサツキ感が生じてしまう。
【0039】
最良のピント状態であれば、孤立ドット及び複数ドットともに再現され、マクロで観察すると一様な濃度の画像と認識できる。しかしながら、デフォーカス状態では、孤立ドットが再現されないため、複数ドットの重なり部しか認識されず、マクロで見てもその複数ドットの重なり部が目立ち、がさついた画像となってしまう。
【0040】
上記のようながさついた画像を防止するために、実施例1の画像形成装置は、LEDヘッド5を高精度で位置決めしかつ経時的にも位置が変化しにくい位置決め部を有する。
【0041】
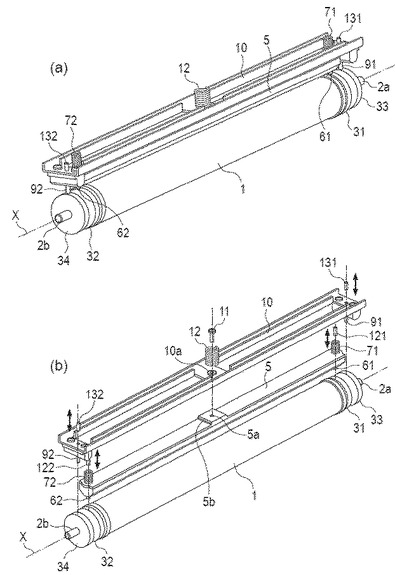
感光体ドラム1に対するLEDヘッド5の位置決めを以下に説明する。
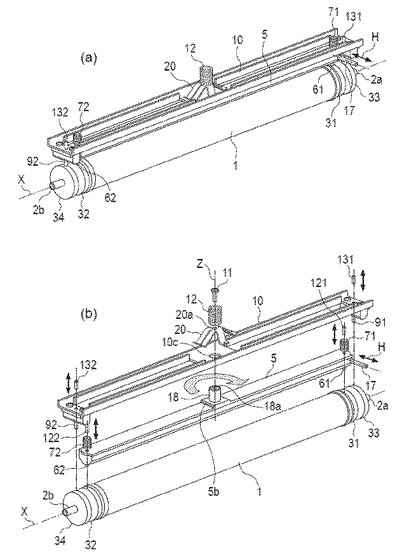
図10は、実施例1による感光体ドラム1に対してLEDヘッド5を位置決めする位置決め部の斜視図である。位置決め部は、第一内側円筒当接部31、第二内側円筒当接部32、第一外側円筒当接部33、第二外側円筒当接部34、第一内側位置決めピン61、第二内側位置決めピン62、第一外側位置決めピン、及び第二外側位置決めピン92を有する。位置決め部は、さらに、ばね部材12、ばね部材71、ばね部材72、及びビス11を有する。
【0042】
感光体ドラム1の両端部には、感光体ドラム1を回転可能に支持するために、感光体ドラム1の軸線X上に回転軸2a及び2bが設けられている。
感光体ドラム1の一端部の回転軸2aには、回転軸2aと同軸の2つの円筒当接部31及び33が設けられている。2つの円筒当接部31及び33は、第一内側円筒当接部31と第一外側円筒当接部33とからなる。
【0043】
第一内側円筒当接部31及び第一外側円筒当接部33は、感光体ドラム1と同軸である。第一内側円筒当接部31及び第一外側円筒当接部33の外径は、感光体ドラム1の外径と同じであるとよい。これらの外径が同じであれば、後述する位置決めを容易にすることができる。しかし、本発明は、これに限定されるものではなく、第一内側円筒当接部31、第一外側円筒当接部33、及び感光体ドラム1の外径が異なっていてもよい。
【0044】
実施例1においては、第一内側円筒当接部31及び第一外側円筒当接部33が回転軸2aに設けられているが、本発明は、これに限定されるものではない。第一内側円筒当接部31及び第一外側円筒当接部33は、感光体ドラム1の一端部に直接設けられていてもよい。
実施例1において、第一内側円筒当接部31と第一外側円筒当接部33は、互いに離れて設けられている。しかし、第一内側円筒当接部31と第一外側円筒当接部33は、互いに隣接していてもよい。
【0045】
第一内側円筒当接部31及び第一外側円筒当接部33は、感光体ドラム1を回転可能に支持する軸受け部として機能するように構成してもよい。
同様にして、感光体ドラム1の他端部の回転軸2bには、回転軸2bと同軸の2つの円筒当接部32及び34が設けられている。2つの円筒当接部32及び34は、第二内側円筒当接部32と第二外側円筒当接部34とからなる。
【0046】
第二内側円筒当接部32及び第二外側円筒当接部34は、感光体ドラム1と同軸である。第二内側円筒当接部32及び第二外側円筒当接部34の外径は、感光体ドラム1の外径と同じであるとよい。これらの外径が同じであれば、後述する位置決めを容易にすることができる。しかし、本発明は、これに限定されるものではなく、第二内側円筒当接部32、第二外側円筒当接部34、及び感光体ドラム1の外径が異なっていてもよい。
【0047】
実施例1においては、第二内側円筒当接部32及び第二外側円筒当接部34が回転軸2bに設けられているが、本発明は、これに限定されるものではない。第二内側円筒当接部32及び第二外側円筒当接部34は、感光体ドラム1の他端部に直接設けられていてもよい。
実施例1において、第二内側円筒当接部32と第二外側円筒当接部34は、互いに離れて設けられている。しかし、第二内側円筒当接部32と第二外側円筒当接部34は、互いに隣接していてもよい。
第二内側円筒当接部32及び第二外側円筒当接部34は、感光体ドラム1を回転可能に支持する軸受け部として機能するように構成してもよい。
【0048】
LEDヘッド5の長手方向の両端部には、第一内側位置決めピン(第一位置決め部材)61及び第二内側位置決めピン(第一位置決め部材)62がそれぞれ設けられている。第一内側位置決めピン61及び第二内側位置決めピン62は、LEDヘッド5の両端部のそれぞれにおいて感光体ドラム1に対してLEDヘッド5を位置決めする。
【0049】
第一内側位置決めピン61は、LEDヘッド5の長手方向の一端部に設けられている。第二内側位置決めピン62は、LEDヘッド5の長手方向の他端部に設けられている。第一内側位置決めピン61及び第二内側位置決めピン62は、LEDヘッド5から光軸方向へ突出して、第一内側円筒当接部31及び第二内側円筒当接部32にそれぞれ当接する。第一内側位置決めピン61の突出量及び第二内側位置決めピン62の突出量は、それぞれ調整可能である。
【0050】
第一内側位置決めピン61及び第二内側位置決めピン62は、LEDヘッド5の両端部に設けられた貫通孔(不図示)の一端部からそれぞれ挿入されている。貫通孔(不図示)の他端部には、それぞれ調整ねじ(第一調整部材)121及び122が設けられている。調整ねじ121及び122を回転することにより、第一内側位置決めピン61及び第二内側位置決めピン62をそれぞれ独立に上下させて、第一内側位置決めピン61の突出量及び第二内側位置決めピン62の突出量をそれぞれ独立して調整する。
【0051】
LEDヘッド5の長手方向の両端部には、ばね部材(第一弾性部材)71及び72が設けられている。ばね部材71及び72は、第一内側位置決めピン61及び第二内側位置決めピン62の位置決め状態を保持するためにLEDヘッド5を感光体ドラム1へ向けて付勢する。
【0052】
ばね部材71は、LEDヘッド5の一端部で第一内側位置決めピン61の近傍に設けられている。ばね部材72は、LEDヘッド5の他端部で第二内側位置決めピン62の近傍に設けられている。
【0053】
ばね部材71及び72は、LEDヘッド5と、LEDヘッド5を支持するために画像形成装置100の本体に設けられた支持体(不図示)との間に配置されている。ばね部材71及び72は、LEDヘッド5の両端部を感光体ドラム1へ向けて付勢することにより、第一内側位置決めピン61及び第二内側位置決めピン62を、第一内側円筒当接部31及び第二内側円筒当接部32にそれぞれ当接させる。
ばね部材71及び72により第一内側位置決めピン61及び第二内側位置決めピン62を第一内側円筒当接部31及び第二内側円筒当接部32にそれぞれ当接させた状態で、調整ねじ121及び122を回転させる。調整ねじ121及び122を回転することにより、第一内側位置決めピン61の突出量及び第二内側位置決めピン62の突出量をそれぞれ独立して調整する。これにより、LEDヘッド5の両端部において、感光体ドラム1とLEDヘッド5との間の距離が第1の設定値(第1の距離)に設定される。
【0054】
感光体ドラム1とLEDヘッド5との間の距離が第1の設定値に設定されると、LED51aと感光体ドラム1の表面との間の光軸方向の距離は、9.9ミリメートル±50マイクロメートルの共役長Tcの許容範囲内に設定される。したがって、LEDヘッド5の両端部は、感光体ドラム1に対して光軸方向に高精度で位置決めされる。
ここで、光軸方向は、ロッドレンズアレイ52の複数のロッドレンズ52aの光軸と平行な方向であって、感光体ドラム1の軸線Xに垂直な方向である。
【0055】
第一内側位置決めピン61及び第二内側位置決めピン62は、ばね部材71及び72により適切な押圧力で第一内側円筒当接部31及び第二内側円筒当接部32にそれぞれ当接している。したがって、部品公差等の影響による初期組み立て時の誤差によるずれを、高精度で補正して、感光体ドラム1に対するLEDヘッド5の位置決めを行うことができる。
第一内側位置決めピン61及び第二内側位置決めピン62は、ばね部材71及び72により、常に、第一内側円筒当接部31及び第二内側円筒当接部32にそれぞれ当接した状態を保持することができる。ばね部材71及び72により当接状態が保持されているので、振動、物流、耐久等の外乱の影響を受けにくく、長期に亘って、高精度に感光体ドラム1とLEDヘッド5との間の距離を第1の設定値に保持することができる。
本実施例において、ばね部材71及び72は、コイルばねである。しかし、コイルばねの代わりに、板ばね、ゴム部材、発泡体などの弾性部材を使用してもよい。
【0056】
保持部材10は、LEDヘッド5を保持する。保持部材10は、LEDヘッド5と同様に、感光体ドラム1の軸線Xと平行な長手方向に延在する細長い形状を有する。LEDヘッド5は、その長手方向が保持部材10の長手方向と合致するように、保持部材10により保持されている。LEDヘッド5は、保持部材10に対して平行に配置されている。保持部材10は、高い剛性を有するように形成されている。
【0057】
LEDヘッド5は、LEDヘッド5の両端部に設けられた第一内側位置決めピン61と第二内側位置決めピン62との間のいずれかの位置の取付部で、保持部材10により保持される。実施例1では、LEDヘッド5は、長手方向の略中央部の取付部で、ビス11により保持部材10に固定されている。
LEDヘッド5の長手方向の略中央部に、ねじ穴5aが設けられている。LEDヘッド5の長手方向の略中央部に、凸部5b(取付部)が設けられている。ねじ穴5aは、凸部5bに設けられている。保持部材10の長手方向の略中央部に、穴10aが設けられている。ビス11は、保持部材10の穴10aを通してLEDヘッド5のねじ穴5aにねじ係合されている。ビス11は、LEDヘッド5の中央部を保持部材10の中央部に固定する。LEDヘッド5の凸部5bは、保持部材10の底面に当接している。
【0058】
LEDヘッド5の中央部は、ビス11により保持部材10に固定されているので、保持部材10の光軸方向への移動により、LEDヘッド5の中央部は光軸方向に移動する。保持部材10は、LEDヘッド5よりも十分に高い剛性を有するように構成されている。したがって、保持部材10を光軸方向へ移動させたときに、保持部材10は変形せずにLEDヘッド5が湾曲してLEDヘッド5の中央部が光軸方向に変位する。なお、保持部材10は、LEDヘッド5を長手方向に湾曲させるために必要な剛性を有していれば、保持部材10が変形してもよい。
LEDヘッド5が長手方向に湾曲したときに、ばね部材71及び72は、第一内側位置決めピン61及び第二内側位置決めピン62が第一内側円筒当接部31及び第二内側円筒当接部32にそれぞれ当接した状態(位置決め状態)を保持する付勢力を有する。
【0059】
保持部材10を感光体ドラム1から離れるように光軸方向に移動すると、LEDヘッド5の中央部は、感光体ドラム1から離れるように光軸方向に移動する。このとき、LEDヘッド5の長手方向の両端部がばね部材71及び72により付勢されているので、第一内側位置決めピン61及び第二内側位置決めピン62は、第一内側円筒当接部31及び第二内側円筒当接部32にそれぞれ当接した状態を保持する。LEDヘッド5の両端部は、位置決め状態が保持される。
LEDヘッド5の両端部は固定されて、LEDヘッド5の中央部が感光体ドラム1から離れる方向へ移動するので、LEDヘッド5は、中央部が感光体ドラム1から離れる方向へ突出した湾曲形状になる。
【0060】
一方、保持部材10を感光体ドラム1に近づくように光軸方向に移動すると、LEDヘッド5の中央部は、感光体ドラム1に近づくように光軸方向に移動する。このとき、LEDヘッド5の長手方向の両端部において、第一内側位置決めピン61及び第二内側位置決めピン62は、第一内側円筒当接部31及び第二内側円筒当接部32にそれぞれ当接した状態を保持する。LEDヘッド5の両端部は、位置決め状態が保持される。LEDヘッド5の中央部に設けられた凸部5bが保持部材10により押されると、LEDヘッド5は、中央部が感光体ドラム1に近づく方向へ突出した湾曲形状になる。
このように、保持部材10を光軸方向へ移動させることにより、感光体ドラム1に対するLEDヘッド5の中央部の位置決めを行うことができる。
【0061】
以下に、保持部材10の光軸方向への位置決めを説明する。
保持部材10の長手方向の両端部には、第一外側位置決めピン(第二位置決め部材)91及び第二外側位置決めピン(第二位置決め部材)92がそれぞれ設けられている。LEDヘッド5の第一内側位置決めピン61及び第二内側位置決めピン62は、保持部材10の第一外側位置決めピン91と第二外側位置決めピン92との間に配置されている。第一外側位置決めピン91及び第二外側位置決めピン92は、LEDヘッド5の凸部(取付部)5bにおいて感光体ドラム1に対してLEDヘッド5を位置決めするために、感光体ドラム1に対して保持部材10を位置決めする。
【0062】
第一外側位置決めピン91は、保持部材10の長手方向の一端部に設けられている。第二外側位置決めピン92は、保持部材10の長手方向の他端部に設けられている。第一外側位置決めピン91及び第二外側位置決めピン92は、保持部材10から光軸方向へ突出して、第一外側円筒当接部33及び第二外側円筒当接部34にそれぞれ当接する。第一外側位置決めピン91の突出量及び第二外側位置決めピン92の突出量は、それぞれ調整可能である。第一外側位置決めピン91及び第二外側位置決めピン92は、保持部材10の両端部に設けられた貫通孔(不図示)の一端部からそれぞれ挿入されている。
【0063】
貫通孔(不図示)の他端部には、それぞれ調整ねじ(第二調整部材)131及び132が設けられている。調整ねじ131及び132を回転することにより、第一外側位置決めピン91及び第二外側位置決めピン92をそれぞれ独立に上下させて、第一外側位置決めピン91の突出量及び第二外側位置決めピン92の突出量をそれぞれ独立して調整する。
【0064】
保持部材10の中央部には、ばね部材(第二弾性部材)12が設けられている。ばね部材12は、第一外側位置決めピン91及び第二外側位置決めピン92の位置決め状態を保持するために保持部材10を感光体ドラム1へ向けて付勢する。ばね部材12は、LEDヘッド5の凸部(取付部)5bの近傍で保持部材10に設けられている。ばね部材12は、保持部材10と、LEDヘッド5を支持するために画像形成装置100の本体に設けられた支持体(不図示)との間に配置されている。
【0065】
ばね部材12は、保持部材10を感光体ドラム1へ向けて付勢することにより、第一外側位置決めピン91及び第二外側位置決めピン92を、第一外側円筒当接部33及び第二外側円筒当接部34にそれぞれ当接させる。これにより、保持部材10の両端部において、感光体ドラム1と保持部材10との間の距離が第2の設定値(第2の距離)に設定される。
【0066】
感光体ドラム1と保持部材10との間の距離が第2の設定値に設定されると、LEDヘッド5の中央部において、LED51aと感光体ドラム1の表面との間の光軸方向の距離は、9.9ミリメートル±50マイクロメートルの共役長Tcの許容範囲内に設定される。したがって、LEDヘッド5の中央部は、感光体ドラム1に対して光軸方向に高精度で位置決めされる。
なお、LEDヘッド5の中央部の位置が許容範囲内に設定されている限り、保持部材10の両端部における感光体ドラム1と保持部材10との間の距離の設定値は、異なっていてもよい。
【0067】
第一外側位置決めピン91及び第二外側位置決めピン92は、ばね部材12により適切な押圧力で第一外側円筒当接部33及び第二外側円筒当接部34にそれぞれ当接している。したがって、部品公差等の影響による初期組み立て時の誤差によるずれを、高精度で補正して、感光体ドラム1に対する保持部材10の位置決めを行うことができる。
第一外側位置決めピン91及び第二外側位置決めピン92は、ばね部材12により、常に、第一外側円筒当接部31及び第二外側円筒当接部32にそれぞれ当接した状態を保持することができる。ばね部材12により当接状態が保持されているので、振動、物流、耐久等の外乱の影響を受けにくく、長期に亘って、高精度に感光体ドラム1と保持部材10との間の距離を第2の設定値に保持することができる。
【0068】
ばね部材12により第一外側位置決めピン91及び第二外側位置決めピン92を第一外側円筒当接部33及び第二外側円筒当接部33にそれぞれ当接させた状態で、調整ねじ131及び132を回転させる。調整ねじ131及び132を回転することにより、LEDヘッド5の中央部を光軸方向に変位させる。これにより、LEDヘッド5の中央部において、感光体ドラム1とLEDヘッド5の中央部との間の距離が第1の設定値(第1の距離)に設定される。
【0069】
感光体ドラム1とLEDヘッド5の中央部との間の距離が第1の設定値に設定されると、LED51aと感光体ドラム1の表面との間の光軸方向の距離は、9.9ミリメートル±50マイクロメートルの共役長Tcの許容範囲内に設定される。したがって、LEDヘッド5の中央部は、感光体ドラム1に対して光軸方向に高精度に位置決めされる。
これによって、LEDヘッド5の長手方向の全域にわたって、LEDヘッド5と感光体ドラム1との間の光軸方向の距離が均一になるように、LEDヘッド5の高精度な位置決めを達成することができる。
本実施例において、ばね部材12は、コイルばねである。しかし、コイルばねの代わりに、板ばね、ゴム部材、発泡体などの弾性部材を使用してもよい。
【0070】
以上のように、LEDヘッド5の中央部を保持部材10に固定し、且つ、LEDヘッド5の両端部及び保持部材10の両端部に位置決めのための調整部材(調整ねじ121、122、131、及び132)を設けた。これにより、LEDヘッド5の長手方向の両端部及び中央部の光軸方向の位置を独立して調整することができる。そして、保持部材10の強度、特に光軸方向の剛性を十分に高く設定すれば、上述した方法により、LEDヘッド5の光軸方向の湾曲調整を行うことが可能となる。
【0071】
LEDヘッド5の湾曲調整により、LEDヘッド5の長手方向の全域に亘って、LEDヘッド5と感光体ドラム1との間の光軸方向の距離の長手方向における変化が小さくなるように高精度な位置決めを実現することができる。
LEDヘッド5の両端部において、第一内側位置決めピン61及び第二内側位置決めピン62は、ばね部材71及び72により、第一内側円筒当接部31及び第二内側円筒当接部32にそれぞれ当接した状態が保持される。LEDヘッド5の中央部の位置は、ビス11を介して保持部材10により保持される。保持部材10の両端部において、第一外側位置決めピン91及び第二外側位置決めピン92は、ばね部材12により、第一外側円筒当接部33及び第二外側円筒当接部34にそれぞれ当接した状態が保持される。
ばね部材71、72、及び12により当接状態が保持されているので、振動、物流、耐久等の外乱の影響を受けにくく、長期に亘って、高精度に感光体ドラム1に対するLEDヘッド5の位置を保証することができる。
【0072】
LEDヘッド5と保持部材10の位置決め方法は、前述した方法だけには限らず、LEDヘッド5及びLEDヘッド5の略中央に締結された保持部材10の感光体ドラム1に対する光軸方向の距離が、それぞれ独立して調整できる構成であれば良い。また、保持部材10によるLEDヘッド5の保持方法は、ビス11による固定に限らず、接着や板バネ等による保持方法でも良い。そして、保持部材10によるLEDヘッド5の保持位置は、長手方向の中央部とは限らず、LED5ヘッドの両端部の位置決めピンに挟まれた領域内のいずれの位置であってもよい。
【実施例2】
【0073】
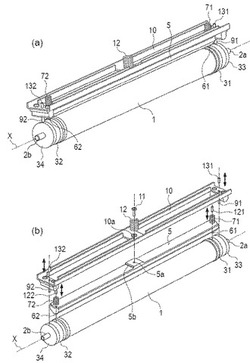
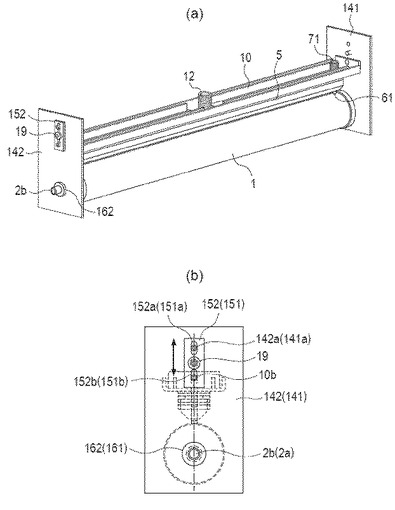
図11は、実施例2による感光体ドラム1に対してLEDヘッド5を位置決めする位置決め部を示す図である。図11(a)は、実施例2による感光体ドラム1に対してLEDヘッド5を位置決めする位置決め部の斜視図である。図11(b)は、保持部材10を位置決めする位置決め部を示す正面図である。
実施例2において、実施例1の構成と同様の構成については同様の参照符号を付して説明を省略する。
【0074】
実施例1において、第一内側位置決めピン61及び第二内側位置決めピン62は、回転軸2aに設けられた第一内側円筒当接部31及び回転軸2bに設けられた第二内側円筒当接部32にそれぞれ当接する。これに対して、実施例2においては、第一内側円筒当接部31及び第二内側円筒当接部32を省略して、第一内側位置決めピン61及び第二内側位置決めピン62が、感光体ドラム1の表面に直接当接するように構成した。
また、実施例1において、第一外側位置決めピン91及び第二外側位置決めピン92は、回転軸2aに設けられた第一外側円筒当接部33及び回転軸2bに設けられた第二外側円筒当接部34にそれぞれ当接する。これに対して、実施例2においては、第一外側位置決めピン91、第二外側位置決めピン92、第一外側円筒当接部33及び第二外側円筒当接部34を省略して、保持部材10の位置を調整板151及び152により調整するように構成した。
実施例2の前述の構造以外の構造は、実施例1の構造と同様であるので、説明を省略する。
【0075】
図11(a)に示すように、感光体ドラム1の回転軸2a(2b)は、軸受け部162(161)を介してそれぞれ側板142(141)により回転可能に支持されている。調整板152(151)は、二つの長穴152a及び152b(151a及び151b)が設けられている。調整板152(151)の長穴152a(151a)は、側板142(141)に設けられたピン142a(141a)に嵌装されている。これによって、調整板152(151)は、光軸方向に移動可能である。
調整板152(151)の長穴152b(151b)には、保持部材10の両端部に設けられたピン10bが嵌入されている。これによって、調整板152(151)を光軸方向に移動したときに、調整板152(151)と共に保持部材10が光軸方向へ移動する。
【0076】
実施例2においては、感光体ドラム1の回転軸2b(2a)と同軸上に設けた軸受け部162(161)に対して、調整板152(151)の位置を調整することにより、部品公差の影響をできる限り少なくしている。
調整板152(151)を側板142(141)に対して光軸方向に移動させることで、保持部材10と感光体ドラム1との間の光軸方向の距離を調整することができる。保持部材10と感光体ドラム1との間の距離を調整した後に、調整板152(151)は、ビス19により側板142(141)に固定される。位置決めピン61及び62は、感光体ドラム1の表面に直接接触している。
【0077】
次に、実施例1及び実施例2における結像位置の調整方法について説明する。
結像位置がずれたときに発生するがさついた画像、つまり粒状性の良くない画像は、視覚特性(VTF)上、認識されやすい低周波数成分を多く含んでいる。最良のピント状態の画像は、孤立ドットもあり、複数ドットもあるが安定して再現するため、高周波成分を多く含み、粒状性が良くない画像とは感じない。この粒状性の違いを利用して、LED51aと感光体ドラム1の表面との間の光軸方向の距離が、共役長Tcの許容範囲内に入っているか否かの判別を行うことができる。
【0078】
粒状性の評価方法として本実施例では、高速フーリエ変換(FFT)とVTFフィルタを用いる方法を行う。中間調のパッチ画像を読み取り、600dpiのRGB信号として出力し、出力信号をグレイスケールに変換する。変換方法としては、補色の関係から、シアンならば赤信号、マゼンタならば緑信号を、イエローならば青信号を抽出する形でグレイスケールに変換する。黒は、分光特性上信号を多く含む緑信号で抽出する。
【0079】
グレイスケールとして変換されたパッチ画像は、FFT処理により周波数成分へ変換される。この周波数成分上においてVTFフィルタをかけ、視覚では認識できない高周波成分をカットする。高周波成分をカットした後の周波数成分を高速逆フーリエ変換(IFFT)し、実画像に戻して標準偏差を求めることにより、その画像の粒状度を求めることができる。一連の作業により、デフォーカス時のような粒状性の良くない画像で、ばらつきのある画像のため、標準偏差値は高く、粒状度の値は高くなってしまう。
【0080】
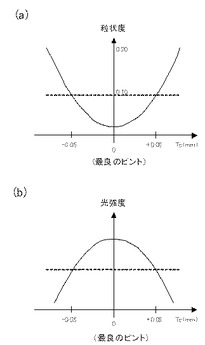
中間調の出力時に孤立ドットと複数ドットがバランス良く混在し、また図8に示すプリンタ出力特性のように、画像に対する濃度変化は急峻な階調を呈する。そこで、この中間調のパッチを出力し、評価サンプルとすると、図12(a)のような共役長に対する粒状度の関係の結果が得られる。共役長Tcの許容範囲である±50マイクロメータ以上の粒状度、0.10を超える値が検出された場合、この画像形成装置はデフォーカスの状態であるということが識別することができる。
【0081】
初期調整時には、LEDヘッド5の長手方向である主走査方向における画像の両端部及び中央部で、粒状度の値がそれぞれ略最小となるように、感光体ドラム1に対するLEDヘッド5の位置を調整する。
【0082】
結像位置の調整方法は、前述した方法に限らない。例えば、感光体ドラム1の表面に相当する位置にCCDセンサやフォトダイオード等の光量センサを配置し、組立工具を用いて調整を行っても良い。
光量センサに対して、LEDヘッド5の位置を光軸方向に移動させてデフォーカスすると、図12(b)に示すような共役長に対する光強度の関係から、光量センサは、LEDヘッド5のデフォーカスに応じた光強度の変化として感知される。そして、この光強度がLEDヘッド5の長手方向の中央部及び両端部でそれぞれ略最大となるように、LEDヘッド5の位置決めピン61及び62及び保持部材10の位置決めピン91及び92の突出量の調整、又は調整板152(151)の調整を行っても良い。
【0083】
上述した粒状度の情報を用いて、規定値0.10を超えない状態にLEDヘッド5の位置を自動で変化させる自動ピント調整機構を設けた構成であっても良い。本実施例においては、自動ピント調整機構を備えなくても、経時に亘って安定した画質を提供することができる。
【0084】
なお、発光素子としてはLEDに限らず、例えば有機EL等の光源を感光体ドラム1の回転方向に対して直交する方向に複数並べて配置してもよい。また、結像素子は正立等倍結像の光学特性を有するロッドレンズアレイに限らず、例えばマイクロレンズ等の倒立、又は非等倍の光学特性を有する複数個のレンズを、複数の光源を並べた方向に沿って列状に配置したものであっても良い。
以上説明した構成により、LEDヘッド5の位置決め調整を長手方向全域に亘って高精度に調整し、長期に亘って、がさつきのない安定した画質を提供することができる。
【実施例3】
【0085】
実施例3は、LEDヘッド5を回転させて主走査方向の全体倍率を補正する装置と、複数のLED51aの発光タイミングをそれぞれ調整して露光位置を補正する補正回路が設けられている点で実施例1と異なる。実施例3のそれ以外の構造は、実施例1の構造と同様であるので、説明を省略する。
【0086】
本実施例においては、主走査方向に対して垂直な副走査方向にLEDヘッド5を回転することができるので、主走査方向の全体倍率を補正することができる。
【0087】
一般に、主走査方向の全体倍率を補正する方法としては、例えば、画像データを変換し、使用するLEDの数を増減させる方法がある。この方法では、補正分解能が画素単位となるため、LEDの発光点間隔以下での補正ができない。600dpiの場合は、LEDの発光点間隔が約42マイクロメートルとなるため、全体倍率の補正分解能は約42マイクロメートルとなる。同様に1200dpiの場合は、LEDの発光点間隔が約21マイクロメートルとなるため、全体倍率の補正分解能は約21マイクロメートルとなる。
タンデム方式の画像形成装置においては、全体倍率の補正の分解能による残差は、色ずれ、色むらといった画像不良を発生させる。
【0088】
しかしながら、近年の高画質化の観点からも、色ずれを1画素以下に留めることが求められるようになっている。そのためには、前記全体倍率補正も1画素以下の補正分解能が必要となる。そこで、本実施形態では、上述したようにLEDヘッド5を副走査方向に揺動させて全体倍率補正を行うことで1画素以下の倍率における補正を可能とした。
【0089】
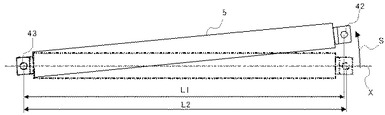
LEDヘッド5を回転させて全体倍率を補正することは、特開2006−082522号公報に開示されている。
特開2006−082522号公報によれば、図13に示すように、LEDヘッド5を、LEDヘッド5の一端部に設けられた軸43を中心に矢印Sで示す方向に他端部を回転させる。LEDヘッド5は、主走査方向(感光体ドラム1の軸線Xに沿う方向)に軸42と軸43との間に露光幅L2を有する。LEDヘッド5を回転することにより、LEDヘッド5の軸42と軸43との間の主走査方向の露光幅は、L1に減少する。
このように、LEDヘッド5の主走査方向の露光幅をL2からL1に変更することにより、全体倍率の補正を行っている。全てのLEDを使用して全体倍率の補正を行っているので解像度が低下しない。また、LED単位での調整より精密に調整できる。
【0090】
なお、LEDヘッド5を回転させるとLEDヘッド5の長手方向が主走査方向に対して傾くため、露光位置がずれる。しかし、LEDヘッド5の回転量に従って、LEDヘッド5の複数のLED51aの露光タイミングをそれぞれ調整することにより、感光体ドラム1の上の露光位置を補正することができるので、画像が斜めに形成されることはない。
【0091】
以下、LEDヘッド5の回転による結像位置のずれの影響を説明する。
LED51aの露光タイミングを調整することにより、感光体ドラム1の上の露光位置を補正することができる。しかし、LEDヘッド5の回転により、LED(発光点)51aと感光体ドラム1の表面(像面)との間の光軸方向の距離が、共役長Tcの許容範囲を外れてしまうことがある。
【0092】
例えば、図13に示すようにLEDヘッド5を矢印Sで示す方向へ回転させて全体倍率を補正すると、図14(a)に示すように、感光体ドラム1の曲率分だけ、感光体ドラム1の表面とLEDヘッド5のLED(発光点)51aとの間の距離にずれが発生する。
【0093】
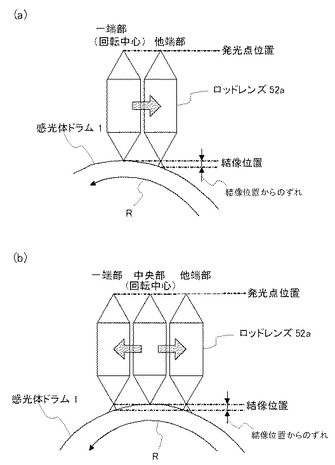
図14(a)は、LEDヘッド5の一端部を中心にLEDヘッド5を回転させたときに発生する結像位置のずれの説明図である。LEDヘッド5の回転中心としての一端部においては、結像位置が感光体ドラム1の表面の上にある。しかし、LEDヘッド5の他端部においては、感光体ドラム1の曲率分だけ感光体ドラム1の表面とLEDヘッド5のLED(発光点)51aとの間の距離にずれが発生するので、結像位置が感光体ドラム1の表面から離れる。
【0094】
実施例3では、LEDヘッド5の回転中心をLEDヘッド5の長手方向の中央部に設けている。図14(b)は、LEDヘッド5の中央部を中心にLEDヘッド5を回転させたときに発生する結像位置のずれの説明図である。LEDヘッド5の回転中心としての中央部においては、結像位置が感光体ドラム1の表面の上にある。しかし、LEDヘッド5の両端部(一端部及び他端部)においては、感光体ドラム1の曲率分だけ感光体ドラム1の表面とLEDヘッド5のLED(発光点)51aとの間の距離にずれが発生するので、結像位置が感光体ドラム1の表面から離れる。
【0095】
次に、LEDヘッド5の全体倍率補正量と結像位置のずれ量の関係について説明する。図15(a)は、LEDヘッド5の端部の揺動量と全体倍率補正量の関係を示す図である。まず、600dpiの1画素以下の全体倍率補正を考える。補足して説明すると、1画素以上の倍率補正は、画像データの変換と併用して行うことができるため、1画素以下について考えることとする。
【0096】
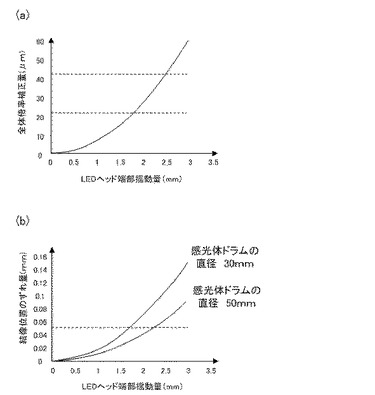
600dpiの1画素以下の全体倍率補正では、最大で約42マイクロメートルの補正量が考えられる。LEDヘッド5の中央部を回転中心とした場合、42マイクロメートルの全体倍率補正に必要なLEDヘッド5の両端部の揺動量は、図15(a)から、それぞれ約2.5ミリメートルである。同様に、1200dpiの1画素以下の全体倍率補正では、最大で約21マイクロメートルの倍率補正が考えられる。その場合に必要なLEDヘッド5の両端部の揺動量は、図15(a)から、それぞれ約1.8ミリメートルである。
【0097】
図15(b)は、LEDヘッド5の端部の揺動量と結像位置のずれ量の関係を示す図である。図15(b)は、感光体ドラム1の直径が30ミリメートルであるときの曲線と、感光体ドラム1の直径が50ミリメートルであるときの曲線を示す。
【0098】
600dpiの1画素以下の全体倍率補正を考えたときに、LEDヘッド5の両端部のそれぞれの最大の揺動量は約2.5ミリメートルである。図15(b)から、感光体ドラム1の直径が30ミリメートルであるときの結像位置のずれ量は約0.10ミリメートル、感光体ドラム1の直径が50ミリメートルであるときの結像位置のずれ量は約0.06ミリメートルである。
【0099】
同様に、1200dpiの1画素以下の全体倍率補正を考えたときに、LEDヘッド5の両端部のそれぞれの最大の揺動量は約1.8ミリメートルである。図15(b)から、感光体ドラム1の直径が30ミリメートルであるときの結像位置のずれ量は約0.05ミリメートル、感光体ドラム1の直径が50ミリメートルであるときの結像位置のずれ量は約0.03ミリメートルである。
【0100】
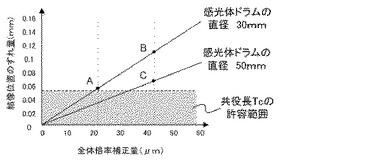
図16は、全体倍率補正量と結像位置のずれ量の関係を示す図である。図15(a)に示すLEDヘッド5の端部の揺動量と全体倍率補正量の関係と、図15(b)に示すLEDヘッド5の端部の揺動量と結像位置のずれ量の関係とから、図16に示す全体倍率補正量と結像位置のずれ量の関係が得られる。
【0101】
図16中のA点は、感光体ドラム1の直径が30ミリメートルである場合に、1200dpiの1画素以下の全体倍率補正を行うときの結像位置のずれ量を示す。B点は、感光体ドラム1の直径が30ミリメートルである場合に、600dpiの1画素以下の全体倍率補正を行うときの結像位置のずれ量を示す。C点は、感光体ドラム1の直径が50ミリメートルである場合に、600dpiの1画素以下の全体倍率補正を行うときの結像位置のずれ量を示す。A点、B点、C点は、図16に示すように、実施例1で述べた共役長Tcの許容範囲±50マイクロメートル(±0.05ミリメートル)から外れている。
つまり、LEDヘッド5を回転して全体倍率補正を行うときには、同時に結像位置のずれ量を補正する必要がある。
【0102】
図17は、実施例3による感光体ドラム1に対してLEDヘッド5を位置決めする位置決め部の斜視図である。感光体ドラム1に対してLEDヘッド5を位置決めする位置決め部は、実施例1と同様の構造である。実施例1と同様の構造には、実施例1と同様の参照符号を付して説明を省略する。実施例3は、保持部材10がLEDヘッド5を保持する保持部を回転中心として、LEDヘッド5が保持部材10に対して回転できるようにした点で、実施例1と異なる。
【0103】
軸部材18は、LEDヘッド5の長手方向の略中央部の凸部5b(取付部)に設けられている。軸部材18の軸線Zは、LEDヘッド5の光軸方向と平行である。また、軸部材18の軸線Zは、感光体ドラム1の軸線Xに対して垂直である。軸部材18は、保持部材10の長手方向の略中央部に設けられた穴10cに回転可能に挿入されている。LEDヘッド5は、軸部材18を中心にして保持部材10に対して回転可能である。
軸部材18の端部と保持部材10の上面とに接触して板ばね(弾性部材)20が設けられている。ビス11は、板ばね20に設けられた穴20aを通って軸部材18に設けられたねじ穴18aに係合して、板ばね20を軸部材18に固定する。板ばね20は、保持部材10とLEDヘッド5の凸部5bとの接触が外れないように、常に、保持部材10をLEDヘッド5に向けて付勢している。しかし、板ばね20は、LEDヘッド5が保持部材10に対しいて回転することを許容する。
【0104】
ばね部材12は、板ばね20と、LEDヘッド5を支持するために画像形成装置100の本体に設けられた支持体(不図示)との間に配置されている。ばね部材12は、保持部材10を感光体ドラム1へ向けて付勢する。
保持部材10は、光軸方向に直交する面内で回転しないように、画像形成装置100の本体に設けられた支持体(不図示)により支持されている。LEDヘッド5は、光軸に直交する面内で軸部材18を中心に回転するように、保持部材10により保持されている。板ばね20により、保持部材10は回転せずに、保持部材10に対してLEDヘッド5のみを独立して回転させることができる。
【0105】
倍率調整ピン(回転量調整部材)17は、LEDヘッド5の長手方向の一端部の近傍に配置されている。LEDヘッド5を回転させると、LEDヘッド5の一端部は、矢印Hで示す揺動方向に移動する。倍率調整ピン17は、矢印Hで示す揺動方向に移動可能に構成されている。
【0106】
LEDヘッド5、感光体ドラム1、及び保持部材10は、通常、それらの長手方向軸が平行に揃うように調整されている。
LEDヘッド5の全体倍率を補正するときに、倍率調整ピン17は、矢印Hで示す揺動方向に移動させられる。倍率調整ピン17の先端部は、LEDヘッド5の長手方向の一端部の側面に当接して、LEDヘッドの一端部を押して揺動方向に移動させる。LEDヘッド5は、軸部材18を中心に保持部材10に対して回転する。倍率調整ピン17の移動量(突出量)に従ってLEDヘッド5は回転して、LEDヘッド5の主走査方向の露光幅が調整される。これによって、LEDヘッド5の全体倍率が補正される。
【0107】
従来の技術においては、LEDヘッド5を回転させると、LEDヘッド5の両端部において、感光体ドラム1の曲率分だけ感光体ドラム1の表面とLEDヘッド5のLED(発光点)51aとの間の距離が大きくなる。このため、図14に示すように、LEDヘッド5の両端部において、結像位置が感光体ドラム1の表面から離れる。
これに対して、実施例3によれば、実施例1で説明したように、LEDヘッド5の両端部は、ばね部材71及び72により付勢されている。ばね部材71及び72の付勢力により、LEDヘッド5の両端部は、第一内側円筒当接部31及び第二内側円筒当接部32の曲率分、すなわち、感光体ドラム1へ向けて変位させられる。
【0108】
ばね部材71及び72の付勢力により、第一内側位置決めピン61及び第二内側位置決めピン62は、常に、第一内側円筒当接部31及び第二内側円筒当接部32にそれぞれ当接している。感光体ドラム1の直径と第一内側円筒当接部31及び第二内側円筒当接部32の直径が同じであるので、LEDヘッド5を回転しても、LEDヘッド5の両端部において、感光体ドラム1とLEDヘッド5との間の距離が第1の設定値(第1の距離)に保持される。
したがって、LEDヘッド5の両端部において、LED51aと感光体ドラム1の表面との間の光軸方向の距離は、9.9ミリメートル±50マイクロメートルの共役長Tcの許容範囲内に保持される。したがって、LEDヘッド5の両端部は、感光体ドラム1に対して光軸方向に高精度で位置決めされた状態が保持される。
【0109】
LEDヘッド5を回転させたときに、保持部材10は回転しない。したがって、保持部材10と感光体ドラム1との距離は、変化しない。保持部材10は、長手方向の中央部に設けられた板バネ20により、LEDヘッド5に対して光軸方向に押付けられながらLEDヘッド5を保持している。
【0110】
LEDヘッド5と保持部材10との間の摩擦力に抗してLEDヘッド5を保持部材10に対して回転させても、LEDヘッド5の長手方向の中央部と保持部材10との間の距離は変化しない。従って、LEDヘッド5の中央部と感光体ドラム1との間の光軸方向の距離を、第1の設定値(第1の距離)に保持することができる。
LEDヘッド5の回転によりLEDヘッド5の両端部が感光体ドラム1へ向けて変位するので、LEDヘッド5は、LEDヘッド5の回転量に従って光軸方向に湾曲した形状になる。
実施例3によれば、LEDヘッド5の両端部が揺動方向(副走査方向)に揺動すると、LEDヘッド5の両端部の揺動量に従ってLEDヘッド5の両端部が感光体ドラム1へ向けて変位して、LEDヘッド5が光軸方向に湾曲する。
【0111】
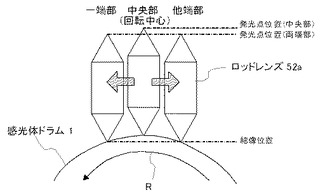
図18は、実施例3による結像位置のずれ防止の説明図である。以上のことより、LEDヘッド5の両端部を揺動方向(副走査方向)に移動させたときに、図18に示すように、LEDヘッド5の長手方向の両端部は、円筒当接部の外径に沿って感光体ドラム1へ向けて変位する。よって、LEDヘッド5の長手方向の両端部と感光体ドラム1との間の光軸方向の距離は変化せずに設定値に保持される。一方、LEDヘッド5を回転させても、LEDヘッド5の中央部と感光体ドラム1との間の光軸方向の距離は変化せずに設定値に保持される。
したがって、LEDヘッド5の全体倍率を補正するためにLEDヘッド5を光軸に垂直な面内で回転させても、LEDヘッド5の全長にわたって高精度に感光体ドラム1とLEDヘッド5との間の距離を設定値に保持することができる。
【0112】
実施例3によれば、LEDヘッド5の全体倍率補正をした際のLEDヘッド5の長手方向の両端部での結像位置のずれが、モータやアクチュエータ等の電気部品を必要とせずに、簡易な構造で補正可能である。
【符号の説明】
【0113】
1 感光体ドラム(像担持体)
5 LEDヘッド(露光装置)
5b 凸部(取付部)
10 保持部材
12 ばね部材(第二弾性部材)
51a LED(発光素子)
61 第一内側位置決めピン(第一位置決め部材)
62 第二内側位置決めピン(第一位置決め部材)
71 ばね部材(第一弾性部材)
72 ばね部材(第一弾性部材)
91 第一外側位置決めピン(第二位置決め部材)
92 第二外側位置決めピン(第二位置決め部材)
100 画像形成装置
P シート(記録媒体)
【技術分野】
【0001】
本発明は、像担持体を露光する複数の発光素子が設けられた発光部材を有する画像形成装置に関する。
【背景技術】
【0002】
従来、電子写真方式におけるデジタル複写機やプリンタ等の画像形成装置において、露光光源として、一般的に半導体レーザを用いている。半導体レーザから射出された光ビームは、回転多面鏡を有する光偏向器により偏向される。偏向された光ビームは、fθレンズを介して感光体ドラムの表面の上に結像され、走査されて、感光体ドラムの表面の上に静電潜像を形成する。
【0003】
一方、近年では、露光光源として発光ダイオードアレイ(以下、LEDアレイという。)を用いた画像形成装置が多く現れるようになった。LEDアレイは、列状に並べて配列された複数個の発光ダイオード(以下、LEDという。)を有する。LEDアレイは、LEDヘッドに保持されている。LEDアレイから射出された複数個の光ビームは、ロッドレンズアレイを介して感光体ドラムの表面上にそれぞれ結像され、感光体ドラムの表面の上に静電潜像を形成する。
【0004】
一般的に、LEDアレイの共役長は、10mm前後である。LEDアレイは、焦点距離が比較的長いレーザ光学系と比べて、感光体ドラムの表面に対する焦点位置の光軸方向のずれの影響を受けやすい光学系である。したがって、像担持体としての感光体ドラムとLEDアレイを保持するLEDヘッドとの間の距離を精度よく一定に維持する必要がある。
【0005】
特許文献1は、感光体ドラムとLEDヘッドとの間の距離をモータにより自動調整する自動調整手段と、記録媒体に記録された計測パターンの濃度を測定して結像位置のずれ量を計測する計測手段とを有する画像形成装置を開示している。計測手段の計測結果に基づいて、自動調整手段は、LEDヘッドの両端部に設けられた調整部材を変位させることにより、LEDヘッドと感光体ドラムとの間の距離を調整する。特許文献1によれば、これによって、高精度にかつ経時変化の影響を受けることなく、LEDヘッドを位置決めすることができる。
【0006】
また、特許文献1の画像形成装置は、LEDヘッドの長手方向の中央部を押圧してLEDヘッドと像担持体との間の距離を調整する押圧手段を有している。LEDヘッドの初期形状は、長手方向の中央部が端部に比べて像担持体から離れた凸形状をしている。押圧手段は、LEDヘッドの中央部の押圧力を調整することにより、LEDヘッドと像担持体との間の距離を調整する。これによって、幅の広いLEDヘッドであっても、LEDプリントヘッドの全幅に亘り高精度に位置決めして、LEDヘッドを画像形成装置に取り付けることができる。
【先行技術文献】
【特許文献】
【0007】
【特許文献1】特開2005−335074号公報
【発明の概要】
【発明が解決しようとする課題】
【0008】
しかしながら、LEDヘッドと像担持体との距離を、露光幅の全域に亘り高精度に位置決めし、長期に亘ってそれを保証することは大変難しい。特許文献1に記載された構成では、初期は組立時の調整を経て高精度に位置決めすることができても、その後に生じる振動や物流及び長期使用の影響により位置決め状態を高精度に保持することができないことがある。
【課題を解決するための手段】
【0009】
上記課題を解決するために、本発明による画像形成装置は、像担持体と、前記像担持体の長手方向に並んで設けられ前記像担持体の表面を露光するために画像情報に従って発光する複数個の発光素子を有する露光装置と、前記露光装置の長手方向の両端部に設けられ、前記両端部のそれぞれにおいて前記像担持体に対して前記露光装置を位置決めする第一位置決め部材と、前記第一位置決め部材の位置決め状態を保持するために前記露光装置を前記像担持体へ向けて付勢する第一弾性部材と、前記露光装置の前記第一位置決め部材の間の取付部で前記露光装置を保持する保持部材と、前記保持部材に設けられ、前記取付部において前記像担持体に対して前記露光装置を位置決めするために、前記像担持体に対して前記保持部材を位置決めする第二位置決め部材と、前記第二位置決め部材の位置決め状態を保持するために前記保持部材を前記像担持体へ向けて付勢する第二弾性部材とを有する。
【発明の効果】
【0010】
本発明によれば、露光装置の長手方向の全域に亘り露光装置を像担持体に対して高精度に位置決めすることができるとともに、振動や物流及び長期使用が位置決め状態に与える影響を小さくすることができる。
【図面の簡単な説明】
【0011】
【図1】本発明の実施例1による画像形成装置の概略断面図。
【図2】LEDヘッドの斜視図。
【図3】ロッドレンズアレイの部分断面斜視図。
【図4】ロッドレンズの説明図。
【図5】変調伝達関数(MTF)による評価の説明図。
【図6】スポットプロファイルを示す図。
【図7】感光体ドラムの特性と現像特性を示す図。
【図8】画像出力信号に対するトナー濃度の関係を示す図。
【図9】孤立ドットの潜像と複数ドットの潜像の表面電位を示す図。
【図10】実施例1による感光体ドラムに対してLEDヘッドを位置決めする位置決め部の斜視図。
【図11】実施例2による感光体ドラムに対してLEDヘッドを位置決めする位置決め部を示す図。
【図12】(a)はデフォーカス量と粒状度の関係を示す図、(b)はデフォーカス量と光強度の関係を示す図。
【図13】従来技術による倍率補正方法の説明図。
【図14】LEDヘッドの回転により生じる結像位置のずれの説明図。
【図15】(a)はLEDヘッドの端部の揺動量と全体倍率補正量の関係を示す図、(b)はLEDヘッドの端部の揺動量と結像位置のずれ量の関係を示す図。
【図16】全体倍率補正量と結像位置のずれ量の関係を示す図。
【図17】実施例3による感光体ドラムに対してLEDヘッドを位置決めする位置決め部の斜視図。
【図18】実施例3による結像位置のずれ防止の説明図。
【発明を実施するための形態】
【0012】
以下、本発明を実施するための形態を添付図面に基づき説明する。
【実施例1】
【0013】
図1は、本発明の実施例1による画像形成装置100の概略断面図である。画像形成装置100は、画像形成部80と、画像形成部80へシート(記録媒体)Pを給送する給送部90とを有する。
【0014】
画像形成部80は、タンデムに配列された4つの画像形成ステーション81(81Y、81C、81M、81K)と、中間転写ベルト(中間転写体)6と、定着装置9とを有する。画像形成ステーション81のそれぞれは、感光体ドラム(像担持体)1(1Y、1C、1M、1K)を有する。感光体ドラム1は、矢印Rで示す方向に回転する。感光体ドラム1の周りには、帯電装置3、LEDヘッド(露光装置)5、現像装置4、一次転写部材7、及びクリーニング装置21が設けられている。
【0015】
帯電装置3(3Y、3C、3M、3K)は、感光体ドラム1(1Y、1C、1M、1K)の表面を均一に帯電する。LEDヘッド5(5Y、5C、5M、5K)は、均一に帯電された感光体ドラム1の表面を入力画像信号に従って露光し、感光体ドラム1の表面に静電潜像を形成する。現像装置4(4Y、4C、4M、4K)は、感光体ドラム1の表面の静電潜像を現像剤(トナー)で現像してトナー像にする。
【0016】
現像装置4Yは、イエロー現像剤(イエロートナー)を有する。現像装置4Yは、感光体ドラム1Yの表面にイエロートナー像を形成する。現像装置4Cは、シアン現像剤(シアントナー)を有する。現像装置4Cは、感光体ドラム1Cの表面にシアントナー像を形成する。現像装置4Mは、マゼンタ現像剤(マゼンタトナー)を有する。現像装置4Mは、感光体ドラム1Mの表面にマゼンタトナー像を形成する。現像装置4Kは、ブラック現像剤(ブラックトナー)を有する。現像装置4Kは、感光体ドラム1Kの表面にブラックトナー像を形成する。
【0017】
中間転写ベルト6は、感光体ドラム1に接触して矢印Eで示す方向に回転する。
一次転写部材7(7Y、7C、7M、7K)は、感光体ドラム1の表面のトナー像を中間転写ベルト6の上へ転写する。シアントナー像は、中間転写ベルト6の上のイエロートナー像の上に重ね合わされる。マゼンタトナー像は、シアントナー像の上に重ね合わされる。ブラックトナー像は、マゼンタトナー像の上に重ね合わされる。
中間転写ベルト6の上に順次重ね合わされた4つのトナー像は、給送部90から給送されたシートPの上へ二次転写ローラ8により転写される。
シートPの上のトナー像は、定着装置9によりシートに定着されシートPの上に画像が形成される。画像が形成されたシートPは、排出ローラ22により排出トレイ23の上に排出される。
【0018】
次に、図2を参照して、実施例1の画像形成装置100に用いられるLEDヘッド5を詳細に説明する。
【0019】
図2は、LEDヘッド5の斜視図である。図2に示すように、感光体ドラム1は、軸線Xを中心として矢印Rで示す方向に回転する。
【0020】
LEDヘッド5は、感光体ドラム1の軸線Xと平行な長手方向に延在する細長い形状を有する。LEDヘッド5は、LEDアレイ(発光素子アレイ)51と、ロッドレンズアレイ(結像素子アレイ)52とを有する。
【0021】
LEDアレイ51は、感光体ドラム1の軸線Xに沿って並べて配置された複数個のLED(発光素子)51aを有する。実施例1において、複数のLED51aは、直線状に配置されている。すなわち、LEDヘッド5は、感光体ドラム1の軸線(長手方向)Xに並んで設けられ、感光体ドラム1の表面を露光するために画像情報に従って発光する複数個のLED51aを有する。
【0022】
ロッドレンズアレイ52は、感光体ドラム1の軸線Xに沿って並べて配置された複数のロッドレンズ(結像素子)52aを有する。図3は、ロッドレンズアレイ52の部分断面斜視図である。ロッドレンズアレイ52は、2枚の板52bの間に、2列で直線状に配置された複数のロッドレンズ52aを有する。ロッドレンズ52aは、正立等倍結像レンズである。ロッドレンズ52aは、LED51aから射出された光を集光して感光体ドラム1の表面の上に等倍で結像する。実施例1では、LEDアレイ51とロッドレンズアレイ52とを一体化して、露光光源としてのLEDヘッド5を構成している。
【0023】
感光体ドラム1を矢印Rで示す方向に回転させながら、LEDアレイ51の複数のLED51aを選択的に発光させることにより、感光体ドラム1の表面に2次元的な静電潜像を形成する。
【0024】
図4は、ロッドレンズ52aの説明図である。図4において、物体としてのLED(発光点)からロッドレンズ52aの端面52cまでの作動距離をL0とする。ロッドレンズ52aの長さをZ0とする。感光体ドラム1の表面(像面)からロッドレンズ52aの端面52dまでの作動距離をL0とする。ロッドレンズ52aの共役長Tcは、Tc=Z0+2×L0で表される。
【0025】
ロッドレンズアレイ52の画像伝送特性は、送られる画像の質、つまり解像力で評価される。画像伝送特性は、変調伝達関数(Modulation Transfer Function(以下、MTFという。))により評価される。
【0026】
図5は、MTFによる評価の説明図である。MTFは、例えば、図5に示す矩形波パターン像の原画がロッドレンズアレイ52を通して形成された場合に、形成された画像がどの程度原画に忠実に再現できているかを示す指標である。図5の画像におけるMTFの値は、次のように定義される。
MTF(w)=(i(w)max−i(w)min)/(i(w)max+i(w)min)×100%
ここで、i(w)max、i(w)minは、各々、空間周波数w(lp/mm)における矩形波応答の極大値、極小値を示す。MTFの値が、100%に近いほど原画に忠実に画像が再現されていることになる。
【0027】
MTFの値は、ロッドレンズアレイ52の焦点位置で測定した場合と、焦点位置からずれて測定した場合とで、大きく異なる。また、ロッドレンズ52aの共役長Tcは、一般的に、10mm前後であるので、焦点距離の比較的長いレーザ光学系と比べて、LEDヘッド5は、焦点位置のずれの影響を受けやすい。したがって、感光体ドラム1とLEDヘッド5との間の距離を常に一定に維持する必要がある。
【0028】
実施例1において、LEDアレイ51は、600dpiの素子密度(解像度)を有する。LEDの電極サイズは、約20マイクロメートル(μm)である。実施例1において、ロッドレンズ52aの直径は約0.6ミリメートル(mm)である。図3に示すように、ロッドレンズアレイ52には、複数のロッドレンズ52aが2列に配置されている。
【0029】
このとき、ロッドレンズアレイ52の共役長Tcは、約9.9ミリメートルである。図4に示すように、共役長Tcは、発光点から像面までの距離である。
しかし、LED(発光点)51aと感光体ドラム1の表面(像面)との間の距離は、さまざまな因子により変動しやすい。
例えば、LEDヘッド5の反り、組み立て時の位置決め誤差、環境変化や物流に伴うLEDヘッド5の変形や位置ずれ等の影響により、LED(発光点)51aと感光体ドラム1の表面(像面)との間の距離は、変動する。
【0030】
実施例1において、良好な画像を得るために、距離の変動の許容範囲は、9.9ミリメートル±50マイクロメートルとする。この許容範囲は、特開2004−240112号公報に記載されているように、一般的な数値である。
【0031】
LED(発光点)51aと感光体ドラム1の表面(像面)との間の距離の変動が許容範囲を超えると、がさついた低画質の画像が出力されることが多くなる。このがさつき感(粒状感)は、MTFの値が低くなりスポットプロファイルが変化することにより生じる。
【0032】
図6は、スポットプロファイルを示す図である。
図6(a)は、最良のピント状態におけるスポットプロファイルを示す図である。図6(a)において、LED(発光点)51aと感光体ドラム1の表面(像面)との間の距離は、9.9ミリメートルの共役長Tcである。図6(a)は、理想的な結像面におけるスポットプロファイルを示している。
図6(b)は、デフォーカス状態におけるスポットプロファイルを示す図である。図6(b)において、LED(発光点)51aと感光体ドラム1の表面(像面)との間の距離は、10.0ミリメートルである。図6(b)は、理想的な結像面から100マイクロメートルだけ離れた位置でのスポットプロファイルを示している。理想的な結像面から100マイクロメートルだけ離れた位置でのスポットプロファイルは、光強度が低く、スポットの両端部が広がった分布を示す。
【0033】
光量が低下した場合の影響を以下に説明する。
図7は、感光体ドラム1の特性と現像特性を示す図である。
【0034】
図7(a)は、光量に対する感光体ドラム1の表面電位の関係を示す図である。図7(a)からわかるように、光量が低い領域において、光量の増大に伴い感光体ドラム1の表面電位が急激に減少する。つまり、感光体ドラム1は、光量が低い領域において光量の変化に対して感光体ドラム1の表面電位の変化が大きいという特性を有している。
図7(b)は、電子写真方式の画像形成において、現像コントラスト電位に対するトナー濃度の関係を示す図である。図7(b)からわかるように、現像コントラスト電位が中程度の領域において、現像コントラスト電位の増大に伴い濃度が急激に増大する。つまり、中程度の現像コントラスト電位において現像コントラスト電位の変化に対して濃度の変化が大きい。このため、中程度の現像コントラスト電位において、画質の劣化した画像が形成されやすい。
よって、振動、物流、耐久等の外乱の影響によりLED51aと感光体ドラム1の表面との間の距離が変動することを防止する必要がある。
【0035】
最良のピント状態とデフォーカス状態とにおけるプリンタ出力特性を以下に説明する。
図8は、画像出力信号に対するトナー濃度の関係を示す図である。図8は、図6のスポットプロファイルと、感光体ドラム1の露光強度に対する電位減衰量を示す特性であるE−V特性と、現像装置4に印加される現像バイアスの直流電位と潜像電位との差分であるV−D特性とに基づいて得られたプリンタ出力特性を示す。
【0036】
デフォーカス状態におけるプリンタ出力特性が最良のピント状態におけるプリンタ出力特性と異なる原因を以下に説明する。
図9は、孤立ドットの潜像と複数ドットの潜像の表面電位を示す図である。図9は、図6のスポットプロファイルと、上記E−V特性と、V−D特性とに基づいて得られた孤立ドット及び複数ドットの潜像の表面電位を模式的に示す。
【0037】
図9(a)は、最良のピント状態における感光体ドラム1の表面の孤立ドットと複数ドットの潜像の表面電位を示す図である。最良のピント状態においては、孤立ドットも複数ドットもドットごとに再現される。
図9(b)は、デフォーカス状態における感光体ドラム1の表面の孤立ドットと複数ドットの潜像の表面電位を示す図である。
【0038】
デフォーカス状態においては光強度が弱く幅広な潜像が形成されるため、孤立ドットが再現されずに複数ドットが重なった位置にドットが再現される。この結果、プリンタ出力特性としては、ハイライト部の濃度は低く、ドットの重なりが現れる中間調で急激に濃度が増大するため、画像出力信号に対する濃度の変化が大きく(カーブの勾配が急峻)なる。したがって、デフォーカス状態においては、階調数、安定性に問題が生じてしまう。
また、孤立ドットは再現されず、ドットが重なった位置のみでドットが再現されるため、孤立ドットと複数ドットが混在する中間調ではガサツキ感が生じてしまう。
【0039】
最良のピント状態であれば、孤立ドット及び複数ドットともに再現され、マクロで観察すると一様な濃度の画像と認識できる。しかしながら、デフォーカス状態では、孤立ドットが再現されないため、複数ドットの重なり部しか認識されず、マクロで見てもその複数ドットの重なり部が目立ち、がさついた画像となってしまう。
【0040】
上記のようながさついた画像を防止するために、実施例1の画像形成装置は、LEDヘッド5を高精度で位置決めしかつ経時的にも位置が変化しにくい位置決め部を有する。
【0041】
感光体ドラム1に対するLEDヘッド5の位置決めを以下に説明する。
図10は、実施例1による感光体ドラム1に対してLEDヘッド5を位置決めする位置決め部の斜視図である。位置決め部は、第一内側円筒当接部31、第二内側円筒当接部32、第一外側円筒当接部33、第二外側円筒当接部34、第一内側位置決めピン61、第二内側位置決めピン62、第一外側位置決めピン、及び第二外側位置決めピン92を有する。位置決め部は、さらに、ばね部材12、ばね部材71、ばね部材72、及びビス11を有する。
【0042】
感光体ドラム1の両端部には、感光体ドラム1を回転可能に支持するために、感光体ドラム1の軸線X上に回転軸2a及び2bが設けられている。
感光体ドラム1の一端部の回転軸2aには、回転軸2aと同軸の2つの円筒当接部31及び33が設けられている。2つの円筒当接部31及び33は、第一内側円筒当接部31と第一外側円筒当接部33とからなる。
【0043】
第一内側円筒当接部31及び第一外側円筒当接部33は、感光体ドラム1と同軸である。第一内側円筒当接部31及び第一外側円筒当接部33の外径は、感光体ドラム1の外径と同じであるとよい。これらの外径が同じであれば、後述する位置決めを容易にすることができる。しかし、本発明は、これに限定されるものではなく、第一内側円筒当接部31、第一外側円筒当接部33、及び感光体ドラム1の外径が異なっていてもよい。
【0044】
実施例1においては、第一内側円筒当接部31及び第一外側円筒当接部33が回転軸2aに設けられているが、本発明は、これに限定されるものではない。第一内側円筒当接部31及び第一外側円筒当接部33は、感光体ドラム1の一端部に直接設けられていてもよい。
実施例1において、第一内側円筒当接部31と第一外側円筒当接部33は、互いに離れて設けられている。しかし、第一内側円筒当接部31と第一外側円筒当接部33は、互いに隣接していてもよい。
【0045】
第一内側円筒当接部31及び第一外側円筒当接部33は、感光体ドラム1を回転可能に支持する軸受け部として機能するように構成してもよい。
同様にして、感光体ドラム1の他端部の回転軸2bには、回転軸2bと同軸の2つの円筒当接部32及び34が設けられている。2つの円筒当接部32及び34は、第二内側円筒当接部32と第二外側円筒当接部34とからなる。
【0046】
第二内側円筒当接部32及び第二外側円筒当接部34は、感光体ドラム1と同軸である。第二内側円筒当接部32及び第二外側円筒当接部34の外径は、感光体ドラム1の外径と同じであるとよい。これらの外径が同じであれば、後述する位置決めを容易にすることができる。しかし、本発明は、これに限定されるものではなく、第二内側円筒当接部32、第二外側円筒当接部34、及び感光体ドラム1の外径が異なっていてもよい。
【0047】
実施例1においては、第二内側円筒当接部32及び第二外側円筒当接部34が回転軸2bに設けられているが、本発明は、これに限定されるものではない。第二内側円筒当接部32及び第二外側円筒当接部34は、感光体ドラム1の他端部に直接設けられていてもよい。
実施例1において、第二内側円筒当接部32と第二外側円筒当接部34は、互いに離れて設けられている。しかし、第二内側円筒当接部32と第二外側円筒当接部34は、互いに隣接していてもよい。
第二内側円筒当接部32及び第二外側円筒当接部34は、感光体ドラム1を回転可能に支持する軸受け部として機能するように構成してもよい。
【0048】
LEDヘッド5の長手方向の両端部には、第一内側位置決めピン(第一位置決め部材)61及び第二内側位置決めピン(第一位置決め部材)62がそれぞれ設けられている。第一内側位置決めピン61及び第二内側位置決めピン62は、LEDヘッド5の両端部のそれぞれにおいて感光体ドラム1に対してLEDヘッド5を位置決めする。
【0049】
第一内側位置決めピン61は、LEDヘッド5の長手方向の一端部に設けられている。第二内側位置決めピン62は、LEDヘッド5の長手方向の他端部に設けられている。第一内側位置決めピン61及び第二内側位置決めピン62は、LEDヘッド5から光軸方向へ突出して、第一内側円筒当接部31及び第二内側円筒当接部32にそれぞれ当接する。第一内側位置決めピン61の突出量及び第二内側位置決めピン62の突出量は、それぞれ調整可能である。
【0050】
第一内側位置決めピン61及び第二内側位置決めピン62は、LEDヘッド5の両端部に設けられた貫通孔(不図示)の一端部からそれぞれ挿入されている。貫通孔(不図示)の他端部には、それぞれ調整ねじ(第一調整部材)121及び122が設けられている。調整ねじ121及び122を回転することにより、第一内側位置決めピン61及び第二内側位置決めピン62をそれぞれ独立に上下させて、第一内側位置決めピン61の突出量及び第二内側位置決めピン62の突出量をそれぞれ独立して調整する。
【0051】
LEDヘッド5の長手方向の両端部には、ばね部材(第一弾性部材)71及び72が設けられている。ばね部材71及び72は、第一内側位置決めピン61及び第二内側位置決めピン62の位置決め状態を保持するためにLEDヘッド5を感光体ドラム1へ向けて付勢する。
【0052】
ばね部材71は、LEDヘッド5の一端部で第一内側位置決めピン61の近傍に設けられている。ばね部材72は、LEDヘッド5の他端部で第二内側位置決めピン62の近傍に設けられている。
【0053】
ばね部材71及び72は、LEDヘッド5と、LEDヘッド5を支持するために画像形成装置100の本体に設けられた支持体(不図示)との間に配置されている。ばね部材71及び72は、LEDヘッド5の両端部を感光体ドラム1へ向けて付勢することにより、第一内側位置決めピン61及び第二内側位置決めピン62を、第一内側円筒当接部31及び第二内側円筒当接部32にそれぞれ当接させる。
ばね部材71及び72により第一内側位置決めピン61及び第二内側位置決めピン62を第一内側円筒当接部31及び第二内側円筒当接部32にそれぞれ当接させた状態で、調整ねじ121及び122を回転させる。調整ねじ121及び122を回転することにより、第一内側位置決めピン61の突出量及び第二内側位置決めピン62の突出量をそれぞれ独立して調整する。これにより、LEDヘッド5の両端部において、感光体ドラム1とLEDヘッド5との間の距離が第1の設定値(第1の距離)に設定される。
【0054】
感光体ドラム1とLEDヘッド5との間の距離が第1の設定値に設定されると、LED51aと感光体ドラム1の表面との間の光軸方向の距離は、9.9ミリメートル±50マイクロメートルの共役長Tcの許容範囲内に設定される。したがって、LEDヘッド5の両端部は、感光体ドラム1に対して光軸方向に高精度で位置決めされる。
ここで、光軸方向は、ロッドレンズアレイ52の複数のロッドレンズ52aの光軸と平行な方向であって、感光体ドラム1の軸線Xに垂直な方向である。
【0055】
第一内側位置決めピン61及び第二内側位置決めピン62は、ばね部材71及び72により適切な押圧力で第一内側円筒当接部31及び第二内側円筒当接部32にそれぞれ当接している。したがって、部品公差等の影響による初期組み立て時の誤差によるずれを、高精度で補正して、感光体ドラム1に対するLEDヘッド5の位置決めを行うことができる。
第一内側位置決めピン61及び第二内側位置決めピン62は、ばね部材71及び72により、常に、第一内側円筒当接部31及び第二内側円筒当接部32にそれぞれ当接した状態を保持することができる。ばね部材71及び72により当接状態が保持されているので、振動、物流、耐久等の外乱の影響を受けにくく、長期に亘って、高精度に感光体ドラム1とLEDヘッド5との間の距離を第1の設定値に保持することができる。
本実施例において、ばね部材71及び72は、コイルばねである。しかし、コイルばねの代わりに、板ばね、ゴム部材、発泡体などの弾性部材を使用してもよい。
【0056】
保持部材10は、LEDヘッド5を保持する。保持部材10は、LEDヘッド5と同様に、感光体ドラム1の軸線Xと平行な長手方向に延在する細長い形状を有する。LEDヘッド5は、その長手方向が保持部材10の長手方向と合致するように、保持部材10により保持されている。LEDヘッド5は、保持部材10に対して平行に配置されている。保持部材10は、高い剛性を有するように形成されている。
【0057】
LEDヘッド5は、LEDヘッド5の両端部に設けられた第一内側位置決めピン61と第二内側位置決めピン62との間のいずれかの位置の取付部で、保持部材10により保持される。実施例1では、LEDヘッド5は、長手方向の略中央部の取付部で、ビス11により保持部材10に固定されている。
LEDヘッド5の長手方向の略中央部に、ねじ穴5aが設けられている。LEDヘッド5の長手方向の略中央部に、凸部5b(取付部)が設けられている。ねじ穴5aは、凸部5bに設けられている。保持部材10の長手方向の略中央部に、穴10aが設けられている。ビス11は、保持部材10の穴10aを通してLEDヘッド5のねじ穴5aにねじ係合されている。ビス11は、LEDヘッド5の中央部を保持部材10の中央部に固定する。LEDヘッド5の凸部5bは、保持部材10の底面に当接している。
【0058】
LEDヘッド5の中央部は、ビス11により保持部材10に固定されているので、保持部材10の光軸方向への移動により、LEDヘッド5の中央部は光軸方向に移動する。保持部材10は、LEDヘッド5よりも十分に高い剛性を有するように構成されている。したがって、保持部材10を光軸方向へ移動させたときに、保持部材10は変形せずにLEDヘッド5が湾曲してLEDヘッド5の中央部が光軸方向に変位する。なお、保持部材10は、LEDヘッド5を長手方向に湾曲させるために必要な剛性を有していれば、保持部材10が変形してもよい。
LEDヘッド5が長手方向に湾曲したときに、ばね部材71及び72は、第一内側位置決めピン61及び第二内側位置決めピン62が第一内側円筒当接部31及び第二内側円筒当接部32にそれぞれ当接した状態(位置決め状態)を保持する付勢力を有する。
【0059】
保持部材10を感光体ドラム1から離れるように光軸方向に移動すると、LEDヘッド5の中央部は、感光体ドラム1から離れるように光軸方向に移動する。このとき、LEDヘッド5の長手方向の両端部がばね部材71及び72により付勢されているので、第一内側位置決めピン61及び第二内側位置決めピン62は、第一内側円筒当接部31及び第二内側円筒当接部32にそれぞれ当接した状態を保持する。LEDヘッド5の両端部は、位置決め状態が保持される。
LEDヘッド5の両端部は固定されて、LEDヘッド5の中央部が感光体ドラム1から離れる方向へ移動するので、LEDヘッド5は、中央部が感光体ドラム1から離れる方向へ突出した湾曲形状になる。
【0060】
一方、保持部材10を感光体ドラム1に近づくように光軸方向に移動すると、LEDヘッド5の中央部は、感光体ドラム1に近づくように光軸方向に移動する。このとき、LEDヘッド5の長手方向の両端部において、第一内側位置決めピン61及び第二内側位置決めピン62は、第一内側円筒当接部31及び第二内側円筒当接部32にそれぞれ当接した状態を保持する。LEDヘッド5の両端部は、位置決め状態が保持される。LEDヘッド5の中央部に設けられた凸部5bが保持部材10により押されると、LEDヘッド5は、中央部が感光体ドラム1に近づく方向へ突出した湾曲形状になる。
このように、保持部材10を光軸方向へ移動させることにより、感光体ドラム1に対するLEDヘッド5の中央部の位置決めを行うことができる。
【0061】
以下に、保持部材10の光軸方向への位置決めを説明する。
保持部材10の長手方向の両端部には、第一外側位置決めピン(第二位置決め部材)91及び第二外側位置決めピン(第二位置決め部材)92がそれぞれ設けられている。LEDヘッド5の第一内側位置決めピン61及び第二内側位置決めピン62は、保持部材10の第一外側位置決めピン91と第二外側位置決めピン92との間に配置されている。第一外側位置決めピン91及び第二外側位置決めピン92は、LEDヘッド5の凸部(取付部)5bにおいて感光体ドラム1に対してLEDヘッド5を位置決めするために、感光体ドラム1に対して保持部材10を位置決めする。
【0062】
第一外側位置決めピン91は、保持部材10の長手方向の一端部に設けられている。第二外側位置決めピン92は、保持部材10の長手方向の他端部に設けられている。第一外側位置決めピン91及び第二外側位置決めピン92は、保持部材10から光軸方向へ突出して、第一外側円筒当接部33及び第二外側円筒当接部34にそれぞれ当接する。第一外側位置決めピン91の突出量及び第二外側位置決めピン92の突出量は、それぞれ調整可能である。第一外側位置決めピン91及び第二外側位置決めピン92は、保持部材10の両端部に設けられた貫通孔(不図示)の一端部からそれぞれ挿入されている。
【0063】
貫通孔(不図示)の他端部には、それぞれ調整ねじ(第二調整部材)131及び132が設けられている。調整ねじ131及び132を回転することにより、第一外側位置決めピン91及び第二外側位置決めピン92をそれぞれ独立に上下させて、第一外側位置決めピン91の突出量及び第二外側位置決めピン92の突出量をそれぞれ独立して調整する。
【0064】
保持部材10の中央部には、ばね部材(第二弾性部材)12が設けられている。ばね部材12は、第一外側位置決めピン91及び第二外側位置決めピン92の位置決め状態を保持するために保持部材10を感光体ドラム1へ向けて付勢する。ばね部材12は、LEDヘッド5の凸部(取付部)5bの近傍で保持部材10に設けられている。ばね部材12は、保持部材10と、LEDヘッド5を支持するために画像形成装置100の本体に設けられた支持体(不図示)との間に配置されている。
【0065】
ばね部材12は、保持部材10を感光体ドラム1へ向けて付勢することにより、第一外側位置決めピン91及び第二外側位置決めピン92を、第一外側円筒当接部33及び第二外側円筒当接部34にそれぞれ当接させる。これにより、保持部材10の両端部において、感光体ドラム1と保持部材10との間の距離が第2の設定値(第2の距離)に設定される。
【0066】
感光体ドラム1と保持部材10との間の距離が第2の設定値に設定されると、LEDヘッド5の中央部において、LED51aと感光体ドラム1の表面との間の光軸方向の距離は、9.9ミリメートル±50マイクロメートルの共役長Tcの許容範囲内に設定される。したがって、LEDヘッド5の中央部は、感光体ドラム1に対して光軸方向に高精度で位置決めされる。
なお、LEDヘッド5の中央部の位置が許容範囲内に設定されている限り、保持部材10の両端部における感光体ドラム1と保持部材10との間の距離の設定値は、異なっていてもよい。
【0067】
第一外側位置決めピン91及び第二外側位置決めピン92は、ばね部材12により適切な押圧力で第一外側円筒当接部33及び第二外側円筒当接部34にそれぞれ当接している。したがって、部品公差等の影響による初期組み立て時の誤差によるずれを、高精度で補正して、感光体ドラム1に対する保持部材10の位置決めを行うことができる。
第一外側位置決めピン91及び第二外側位置決めピン92は、ばね部材12により、常に、第一外側円筒当接部31及び第二外側円筒当接部32にそれぞれ当接した状態を保持することができる。ばね部材12により当接状態が保持されているので、振動、物流、耐久等の外乱の影響を受けにくく、長期に亘って、高精度に感光体ドラム1と保持部材10との間の距離を第2の設定値に保持することができる。
【0068】
ばね部材12により第一外側位置決めピン91及び第二外側位置決めピン92を第一外側円筒当接部33及び第二外側円筒当接部33にそれぞれ当接させた状態で、調整ねじ131及び132を回転させる。調整ねじ131及び132を回転することにより、LEDヘッド5の中央部を光軸方向に変位させる。これにより、LEDヘッド5の中央部において、感光体ドラム1とLEDヘッド5の中央部との間の距離が第1の設定値(第1の距離)に設定される。
【0069】
感光体ドラム1とLEDヘッド5の中央部との間の距離が第1の設定値に設定されると、LED51aと感光体ドラム1の表面との間の光軸方向の距離は、9.9ミリメートル±50マイクロメートルの共役長Tcの許容範囲内に設定される。したがって、LEDヘッド5の中央部は、感光体ドラム1に対して光軸方向に高精度に位置決めされる。
これによって、LEDヘッド5の長手方向の全域にわたって、LEDヘッド5と感光体ドラム1との間の光軸方向の距離が均一になるように、LEDヘッド5の高精度な位置決めを達成することができる。
本実施例において、ばね部材12は、コイルばねである。しかし、コイルばねの代わりに、板ばね、ゴム部材、発泡体などの弾性部材を使用してもよい。
【0070】
以上のように、LEDヘッド5の中央部を保持部材10に固定し、且つ、LEDヘッド5の両端部及び保持部材10の両端部に位置決めのための調整部材(調整ねじ121、122、131、及び132)を設けた。これにより、LEDヘッド5の長手方向の両端部及び中央部の光軸方向の位置を独立して調整することができる。そして、保持部材10の強度、特に光軸方向の剛性を十分に高く設定すれば、上述した方法により、LEDヘッド5の光軸方向の湾曲調整を行うことが可能となる。
【0071】
LEDヘッド5の湾曲調整により、LEDヘッド5の長手方向の全域に亘って、LEDヘッド5と感光体ドラム1との間の光軸方向の距離の長手方向における変化が小さくなるように高精度な位置決めを実現することができる。
LEDヘッド5の両端部において、第一内側位置決めピン61及び第二内側位置決めピン62は、ばね部材71及び72により、第一内側円筒当接部31及び第二内側円筒当接部32にそれぞれ当接した状態が保持される。LEDヘッド5の中央部の位置は、ビス11を介して保持部材10により保持される。保持部材10の両端部において、第一外側位置決めピン91及び第二外側位置決めピン92は、ばね部材12により、第一外側円筒当接部33及び第二外側円筒当接部34にそれぞれ当接した状態が保持される。
ばね部材71、72、及び12により当接状態が保持されているので、振動、物流、耐久等の外乱の影響を受けにくく、長期に亘って、高精度に感光体ドラム1に対するLEDヘッド5の位置を保証することができる。
【0072】
LEDヘッド5と保持部材10の位置決め方法は、前述した方法だけには限らず、LEDヘッド5及びLEDヘッド5の略中央に締結された保持部材10の感光体ドラム1に対する光軸方向の距離が、それぞれ独立して調整できる構成であれば良い。また、保持部材10によるLEDヘッド5の保持方法は、ビス11による固定に限らず、接着や板バネ等による保持方法でも良い。そして、保持部材10によるLEDヘッド5の保持位置は、長手方向の中央部とは限らず、LED5ヘッドの両端部の位置決めピンに挟まれた領域内のいずれの位置であってもよい。
【実施例2】
【0073】
図11は、実施例2による感光体ドラム1に対してLEDヘッド5を位置決めする位置決め部を示す図である。図11(a)は、実施例2による感光体ドラム1に対してLEDヘッド5を位置決めする位置決め部の斜視図である。図11(b)は、保持部材10を位置決めする位置決め部を示す正面図である。
実施例2において、実施例1の構成と同様の構成については同様の参照符号を付して説明を省略する。
【0074】
実施例1において、第一内側位置決めピン61及び第二内側位置決めピン62は、回転軸2aに設けられた第一内側円筒当接部31及び回転軸2bに設けられた第二内側円筒当接部32にそれぞれ当接する。これに対して、実施例2においては、第一内側円筒当接部31及び第二内側円筒当接部32を省略して、第一内側位置決めピン61及び第二内側位置決めピン62が、感光体ドラム1の表面に直接当接するように構成した。
また、実施例1において、第一外側位置決めピン91及び第二外側位置決めピン92は、回転軸2aに設けられた第一外側円筒当接部33及び回転軸2bに設けられた第二外側円筒当接部34にそれぞれ当接する。これに対して、実施例2においては、第一外側位置決めピン91、第二外側位置決めピン92、第一外側円筒当接部33及び第二外側円筒当接部34を省略して、保持部材10の位置を調整板151及び152により調整するように構成した。
実施例2の前述の構造以外の構造は、実施例1の構造と同様であるので、説明を省略する。
【0075】
図11(a)に示すように、感光体ドラム1の回転軸2a(2b)は、軸受け部162(161)を介してそれぞれ側板142(141)により回転可能に支持されている。調整板152(151)は、二つの長穴152a及び152b(151a及び151b)が設けられている。調整板152(151)の長穴152a(151a)は、側板142(141)に設けられたピン142a(141a)に嵌装されている。これによって、調整板152(151)は、光軸方向に移動可能である。
調整板152(151)の長穴152b(151b)には、保持部材10の両端部に設けられたピン10bが嵌入されている。これによって、調整板152(151)を光軸方向に移動したときに、調整板152(151)と共に保持部材10が光軸方向へ移動する。
【0076】
実施例2においては、感光体ドラム1の回転軸2b(2a)と同軸上に設けた軸受け部162(161)に対して、調整板152(151)の位置を調整することにより、部品公差の影響をできる限り少なくしている。
調整板152(151)を側板142(141)に対して光軸方向に移動させることで、保持部材10と感光体ドラム1との間の光軸方向の距離を調整することができる。保持部材10と感光体ドラム1との間の距離を調整した後に、調整板152(151)は、ビス19により側板142(141)に固定される。位置決めピン61及び62は、感光体ドラム1の表面に直接接触している。
【0077】
次に、実施例1及び実施例2における結像位置の調整方法について説明する。
結像位置がずれたときに発生するがさついた画像、つまり粒状性の良くない画像は、視覚特性(VTF)上、認識されやすい低周波数成分を多く含んでいる。最良のピント状態の画像は、孤立ドットもあり、複数ドットもあるが安定して再現するため、高周波成分を多く含み、粒状性が良くない画像とは感じない。この粒状性の違いを利用して、LED51aと感光体ドラム1の表面との間の光軸方向の距離が、共役長Tcの許容範囲内に入っているか否かの判別を行うことができる。
【0078】
粒状性の評価方法として本実施例では、高速フーリエ変換(FFT)とVTFフィルタを用いる方法を行う。中間調のパッチ画像を読み取り、600dpiのRGB信号として出力し、出力信号をグレイスケールに変換する。変換方法としては、補色の関係から、シアンならば赤信号、マゼンタならば緑信号を、イエローならば青信号を抽出する形でグレイスケールに変換する。黒は、分光特性上信号を多く含む緑信号で抽出する。
【0079】
グレイスケールとして変換されたパッチ画像は、FFT処理により周波数成分へ変換される。この周波数成分上においてVTFフィルタをかけ、視覚では認識できない高周波成分をカットする。高周波成分をカットした後の周波数成分を高速逆フーリエ変換(IFFT)し、実画像に戻して標準偏差を求めることにより、その画像の粒状度を求めることができる。一連の作業により、デフォーカス時のような粒状性の良くない画像で、ばらつきのある画像のため、標準偏差値は高く、粒状度の値は高くなってしまう。
【0080】
中間調の出力時に孤立ドットと複数ドットがバランス良く混在し、また図8に示すプリンタ出力特性のように、画像に対する濃度変化は急峻な階調を呈する。そこで、この中間調のパッチを出力し、評価サンプルとすると、図12(a)のような共役長に対する粒状度の関係の結果が得られる。共役長Tcの許容範囲である±50マイクロメータ以上の粒状度、0.10を超える値が検出された場合、この画像形成装置はデフォーカスの状態であるということが識別することができる。
【0081】
初期調整時には、LEDヘッド5の長手方向である主走査方向における画像の両端部及び中央部で、粒状度の値がそれぞれ略最小となるように、感光体ドラム1に対するLEDヘッド5の位置を調整する。
【0082】
結像位置の調整方法は、前述した方法に限らない。例えば、感光体ドラム1の表面に相当する位置にCCDセンサやフォトダイオード等の光量センサを配置し、組立工具を用いて調整を行っても良い。
光量センサに対して、LEDヘッド5の位置を光軸方向に移動させてデフォーカスすると、図12(b)に示すような共役長に対する光強度の関係から、光量センサは、LEDヘッド5のデフォーカスに応じた光強度の変化として感知される。そして、この光強度がLEDヘッド5の長手方向の中央部及び両端部でそれぞれ略最大となるように、LEDヘッド5の位置決めピン61及び62及び保持部材10の位置決めピン91及び92の突出量の調整、又は調整板152(151)の調整を行っても良い。
【0083】
上述した粒状度の情報を用いて、規定値0.10を超えない状態にLEDヘッド5の位置を自動で変化させる自動ピント調整機構を設けた構成であっても良い。本実施例においては、自動ピント調整機構を備えなくても、経時に亘って安定した画質を提供することができる。
【0084】
なお、発光素子としてはLEDに限らず、例えば有機EL等の光源を感光体ドラム1の回転方向に対して直交する方向に複数並べて配置してもよい。また、結像素子は正立等倍結像の光学特性を有するロッドレンズアレイに限らず、例えばマイクロレンズ等の倒立、又は非等倍の光学特性を有する複数個のレンズを、複数の光源を並べた方向に沿って列状に配置したものであっても良い。
以上説明した構成により、LEDヘッド5の位置決め調整を長手方向全域に亘って高精度に調整し、長期に亘って、がさつきのない安定した画質を提供することができる。
【実施例3】
【0085】
実施例3は、LEDヘッド5を回転させて主走査方向の全体倍率を補正する装置と、複数のLED51aの発光タイミングをそれぞれ調整して露光位置を補正する補正回路が設けられている点で実施例1と異なる。実施例3のそれ以外の構造は、実施例1の構造と同様であるので、説明を省略する。
【0086】
本実施例においては、主走査方向に対して垂直な副走査方向にLEDヘッド5を回転することができるので、主走査方向の全体倍率を補正することができる。
【0087】
一般に、主走査方向の全体倍率を補正する方法としては、例えば、画像データを変換し、使用するLEDの数を増減させる方法がある。この方法では、補正分解能が画素単位となるため、LEDの発光点間隔以下での補正ができない。600dpiの場合は、LEDの発光点間隔が約42マイクロメートルとなるため、全体倍率の補正分解能は約42マイクロメートルとなる。同様に1200dpiの場合は、LEDの発光点間隔が約21マイクロメートルとなるため、全体倍率の補正分解能は約21マイクロメートルとなる。
タンデム方式の画像形成装置においては、全体倍率の補正の分解能による残差は、色ずれ、色むらといった画像不良を発生させる。
【0088】
しかしながら、近年の高画質化の観点からも、色ずれを1画素以下に留めることが求められるようになっている。そのためには、前記全体倍率補正も1画素以下の補正分解能が必要となる。そこで、本実施形態では、上述したようにLEDヘッド5を副走査方向に揺動させて全体倍率補正を行うことで1画素以下の倍率における補正を可能とした。
【0089】
LEDヘッド5を回転させて全体倍率を補正することは、特開2006−082522号公報に開示されている。
特開2006−082522号公報によれば、図13に示すように、LEDヘッド5を、LEDヘッド5の一端部に設けられた軸43を中心に矢印Sで示す方向に他端部を回転させる。LEDヘッド5は、主走査方向(感光体ドラム1の軸線Xに沿う方向)に軸42と軸43との間に露光幅L2を有する。LEDヘッド5を回転することにより、LEDヘッド5の軸42と軸43との間の主走査方向の露光幅は、L1に減少する。
このように、LEDヘッド5の主走査方向の露光幅をL2からL1に変更することにより、全体倍率の補正を行っている。全てのLEDを使用して全体倍率の補正を行っているので解像度が低下しない。また、LED単位での調整より精密に調整できる。
【0090】
なお、LEDヘッド5を回転させるとLEDヘッド5の長手方向が主走査方向に対して傾くため、露光位置がずれる。しかし、LEDヘッド5の回転量に従って、LEDヘッド5の複数のLED51aの露光タイミングをそれぞれ調整することにより、感光体ドラム1の上の露光位置を補正することができるので、画像が斜めに形成されることはない。
【0091】
以下、LEDヘッド5の回転による結像位置のずれの影響を説明する。
LED51aの露光タイミングを調整することにより、感光体ドラム1の上の露光位置を補正することができる。しかし、LEDヘッド5の回転により、LED(発光点)51aと感光体ドラム1の表面(像面)との間の光軸方向の距離が、共役長Tcの許容範囲を外れてしまうことがある。
【0092】
例えば、図13に示すようにLEDヘッド5を矢印Sで示す方向へ回転させて全体倍率を補正すると、図14(a)に示すように、感光体ドラム1の曲率分だけ、感光体ドラム1の表面とLEDヘッド5のLED(発光点)51aとの間の距離にずれが発生する。
【0093】
図14(a)は、LEDヘッド5の一端部を中心にLEDヘッド5を回転させたときに発生する結像位置のずれの説明図である。LEDヘッド5の回転中心としての一端部においては、結像位置が感光体ドラム1の表面の上にある。しかし、LEDヘッド5の他端部においては、感光体ドラム1の曲率分だけ感光体ドラム1の表面とLEDヘッド5のLED(発光点)51aとの間の距離にずれが発生するので、結像位置が感光体ドラム1の表面から離れる。
【0094】
実施例3では、LEDヘッド5の回転中心をLEDヘッド5の長手方向の中央部に設けている。図14(b)は、LEDヘッド5の中央部を中心にLEDヘッド5を回転させたときに発生する結像位置のずれの説明図である。LEDヘッド5の回転中心としての中央部においては、結像位置が感光体ドラム1の表面の上にある。しかし、LEDヘッド5の両端部(一端部及び他端部)においては、感光体ドラム1の曲率分だけ感光体ドラム1の表面とLEDヘッド5のLED(発光点)51aとの間の距離にずれが発生するので、結像位置が感光体ドラム1の表面から離れる。
【0095】
次に、LEDヘッド5の全体倍率補正量と結像位置のずれ量の関係について説明する。図15(a)は、LEDヘッド5の端部の揺動量と全体倍率補正量の関係を示す図である。まず、600dpiの1画素以下の全体倍率補正を考える。補足して説明すると、1画素以上の倍率補正は、画像データの変換と併用して行うことができるため、1画素以下について考えることとする。
【0096】
600dpiの1画素以下の全体倍率補正では、最大で約42マイクロメートルの補正量が考えられる。LEDヘッド5の中央部を回転中心とした場合、42マイクロメートルの全体倍率補正に必要なLEDヘッド5の両端部の揺動量は、図15(a)から、それぞれ約2.5ミリメートルである。同様に、1200dpiの1画素以下の全体倍率補正では、最大で約21マイクロメートルの倍率補正が考えられる。その場合に必要なLEDヘッド5の両端部の揺動量は、図15(a)から、それぞれ約1.8ミリメートルである。
【0097】
図15(b)は、LEDヘッド5の端部の揺動量と結像位置のずれ量の関係を示す図である。図15(b)は、感光体ドラム1の直径が30ミリメートルであるときの曲線と、感光体ドラム1の直径が50ミリメートルであるときの曲線を示す。
【0098】
600dpiの1画素以下の全体倍率補正を考えたときに、LEDヘッド5の両端部のそれぞれの最大の揺動量は約2.5ミリメートルである。図15(b)から、感光体ドラム1の直径が30ミリメートルであるときの結像位置のずれ量は約0.10ミリメートル、感光体ドラム1の直径が50ミリメートルであるときの結像位置のずれ量は約0.06ミリメートルである。
【0099】
同様に、1200dpiの1画素以下の全体倍率補正を考えたときに、LEDヘッド5の両端部のそれぞれの最大の揺動量は約1.8ミリメートルである。図15(b)から、感光体ドラム1の直径が30ミリメートルであるときの結像位置のずれ量は約0.05ミリメートル、感光体ドラム1の直径が50ミリメートルであるときの結像位置のずれ量は約0.03ミリメートルである。
【0100】
図16は、全体倍率補正量と結像位置のずれ量の関係を示す図である。図15(a)に示すLEDヘッド5の端部の揺動量と全体倍率補正量の関係と、図15(b)に示すLEDヘッド5の端部の揺動量と結像位置のずれ量の関係とから、図16に示す全体倍率補正量と結像位置のずれ量の関係が得られる。
【0101】
図16中のA点は、感光体ドラム1の直径が30ミリメートルである場合に、1200dpiの1画素以下の全体倍率補正を行うときの結像位置のずれ量を示す。B点は、感光体ドラム1の直径が30ミリメートルである場合に、600dpiの1画素以下の全体倍率補正を行うときの結像位置のずれ量を示す。C点は、感光体ドラム1の直径が50ミリメートルである場合に、600dpiの1画素以下の全体倍率補正を行うときの結像位置のずれ量を示す。A点、B点、C点は、図16に示すように、実施例1で述べた共役長Tcの許容範囲±50マイクロメートル(±0.05ミリメートル)から外れている。
つまり、LEDヘッド5を回転して全体倍率補正を行うときには、同時に結像位置のずれ量を補正する必要がある。
【0102】
図17は、実施例3による感光体ドラム1に対してLEDヘッド5を位置決めする位置決め部の斜視図である。感光体ドラム1に対してLEDヘッド5を位置決めする位置決め部は、実施例1と同様の構造である。実施例1と同様の構造には、実施例1と同様の参照符号を付して説明を省略する。実施例3は、保持部材10がLEDヘッド5を保持する保持部を回転中心として、LEDヘッド5が保持部材10に対して回転できるようにした点で、実施例1と異なる。
【0103】
軸部材18は、LEDヘッド5の長手方向の略中央部の凸部5b(取付部)に設けられている。軸部材18の軸線Zは、LEDヘッド5の光軸方向と平行である。また、軸部材18の軸線Zは、感光体ドラム1の軸線Xに対して垂直である。軸部材18は、保持部材10の長手方向の略中央部に設けられた穴10cに回転可能に挿入されている。LEDヘッド5は、軸部材18を中心にして保持部材10に対して回転可能である。
軸部材18の端部と保持部材10の上面とに接触して板ばね(弾性部材)20が設けられている。ビス11は、板ばね20に設けられた穴20aを通って軸部材18に設けられたねじ穴18aに係合して、板ばね20を軸部材18に固定する。板ばね20は、保持部材10とLEDヘッド5の凸部5bとの接触が外れないように、常に、保持部材10をLEDヘッド5に向けて付勢している。しかし、板ばね20は、LEDヘッド5が保持部材10に対しいて回転することを許容する。
【0104】
ばね部材12は、板ばね20と、LEDヘッド5を支持するために画像形成装置100の本体に設けられた支持体(不図示)との間に配置されている。ばね部材12は、保持部材10を感光体ドラム1へ向けて付勢する。
保持部材10は、光軸方向に直交する面内で回転しないように、画像形成装置100の本体に設けられた支持体(不図示)により支持されている。LEDヘッド5は、光軸に直交する面内で軸部材18を中心に回転するように、保持部材10により保持されている。板ばね20により、保持部材10は回転せずに、保持部材10に対してLEDヘッド5のみを独立して回転させることができる。
【0105】
倍率調整ピン(回転量調整部材)17は、LEDヘッド5の長手方向の一端部の近傍に配置されている。LEDヘッド5を回転させると、LEDヘッド5の一端部は、矢印Hで示す揺動方向に移動する。倍率調整ピン17は、矢印Hで示す揺動方向に移動可能に構成されている。
【0106】
LEDヘッド5、感光体ドラム1、及び保持部材10は、通常、それらの長手方向軸が平行に揃うように調整されている。
LEDヘッド5の全体倍率を補正するときに、倍率調整ピン17は、矢印Hで示す揺動方向に移動させられる。倍率調整ピン17の先端部は、LEDヘッド5の長手方向の一端部の側面に当接して、LEDヘッドの一端部を押して揺動方向に移動させる。LEDヘッド5は、軸部材18を中心に保持部材10に対して回転する。倍率調整ピン17の移動量(突出量)に従ってLEDヘッド5は回転して、LEDヘッド5の主走査方向の露光幅が調整される。これによって、LEDヘッド5の全体倍率が補正される。
【0107】
従来の技術においては、LEDヘッド5を回転させると、LEDヘッド5の両端部において、感光体ドラム1の曲率分だけ感光体ドラム1の表面とLEDヘッド5のLED(発光点)51aとの間の距離が大きくなる。このため、図14に示すように、LEDヘッド5の両端部において、結像位置が感光体ドラム1の表面から離れる。
これに対して、実施例3によれば、実施例1で説明したように、LEDヘッド5の両端部は、ばね部材71及び72により付勢されている。ばね部材71及び72の付勢力により、LEDヘッド5の両端部は、第一内側円筒当接部31及び第二内側円筒当接部32の曲率分、すなわち、感光体ドラム1へ向けて変位させられる。
【0108】
ばね部材71及び72の付勢力により、第一内側位置決めピン61及び第二内側位置決めピン62は、常に、第一内側円筒当接部31及び第二内側円筒当接部32にそれぞれ当接している。感光体ドラム1の直径と第一内側円筒当接部31及び第二内側円筒当接部32の直径が同じであるので、LEDヘッド5を回転しても、LEDヘッド5の両端部において、感光体ドラム1とLEDヘッド5との間の距離が第1の設定値(第1の距離)に保持される。
したがって、LEDヘッド5の両端部において、LED51aと感光体ドラム1の表面との間の光軸方向の距離は、9.9ミリメートル±50マイクロメートルの共役長Tcの許容範囲内に保持される。したがって、LEDヘッド5の両端部は、感光体ドラム1に対して光軸方向に高精度で位置決めされた状態が保持される。
【0109】
LEDヘッド5を回転させたときに、保持部材10は回転しない。したがって、保持部材10と感光体ドラム1との距離は、変化しない。保持部材10は、長手方向の中央部に設けられた板バネ20により、LEDヘッド5に対して光軸方向に押付けられながらLEDヘッド5を保持している。
【0110】
LEDヘッド5と保持部材10との間の摩擦力に抗してLEDヘッド5を保持部材10に対して回転させても、LEDヘッド5の長手方向の中央部と保持部材10との間の距離は変化しない。従って、LEDヘッド5の中央部と感光体ドラム1との間の光軸方向の距離を、第1の設定値(第1の距離)に保持することができる。
LEDヘッド5の回転によりLEDヘッド5の両端部が感光体ドラム1へ向けて変位するので、LEDヘッド5は、LEDヘッド5の回転量に従って光軸方向に湾曲した形状になる。
実施例3によれば、LEDヘッド5の両端部が揺動方向(副走査方向)に揺動すると、LEDヘッド5の両端部の揺動量に従ってLEDヘッド5の両端部が感光体ドラム1へ向けて変位して、LEDヘッド5が光軸方向に湾曲する。
【0111】
図18は、実施例3による結像位置のずれ防止の説明図である。以上のことより、LEDヘッド5の両端部を揺動方向(副走査方向)に移動させたときに、図18に示すように、LEDヘッド5の長手方向の両端部は、円筒当接部の外径に沿って感光体ドラム1へ向けて変位する。よって、LEDヘッド5の長手方向の両端部と感光体ドラム1との間の光軸方向の距離は変化せずに設定値に保持される。一方、LEDヘッド5を回転させても、LEDヘッド5の中央部と感光体ドラム1との間の光軸方向の距離は変化せずに設定値に保持される。
したがって、LEDヘッド5の全体倍率を補正するためにLEDヘッド5を光軸に垂直な面内で回転させても、LEDヘッド5の全長にわたって高精度に感光体ドラム1とLEDヘッド5との間の距離を設定値に保持することができる。
【0112】
実施例3によれば、LEDヘッド5の全体倍率補正をした際のLEDヘッド5の長手方向の両端部での結像位置のずれが、モータやアクチュエータ等の電気部品を必要とせずに、簡易な構造で補正可能である。
【符号の説明】
【0113】
1 感光体ドラム(像担持体)
5 LEDヘッド(露光装置)
5b 凸部(取付部)
10 保持部材
12 ばね部材(第二弾性部材)
51a LED(発光素子)
61 第一内側位置決めピン(第一位置決め部材)
62 第二内側位置決めピン(第一位置決め部材)
71 ばね部材(第一弾性部材)
72 ばね部材(第一弾性部材)
91 第一外側位置決めピン(第二位置決め部材)
92 第二外側位置決めピン(第二位置決め部材)
100 画像形成装置
P シート(記録媒体)
【特許請求の範囲】
【請求項1】
記録媒体に画像を形成する画像形成装置であって、
像担持体と、
前記像担持体の長手方向に並んで設けられ前記像担持体の表面を露光するために画像情報に従って発光する複数個の発光素子を有する露光装置と、
前記露光装置の長手方向の両端部に設けられ、前記両端部のそれぞれにおいて前記像担持体に対して前記露光装置を位置決めする第一位置決め部材と、
前記第一位置決め部材の位置決め状態を保持するために前記露光装置を前記像担持体へ向けて付勢する第一弾性部材と、
前記露光装置の前記第一位置決め部材の間の取付部で前記露光装置を保持する保持部材と、
前記保持部材に設けられ、前記取付部において前記像担持体に対して前記露光装置を位置決めするために、前記像担持体に対して前記保持部材を位置決めする第二位置決め部材と、
前記第二位置決め部材の位置決め状態を保持するために前記保持部材を前記像担持体へ向けて付勢する第二弾性部材と
を有することを特徴とする画像形成装置。
【請求項2】
前記第一弾性部材は、前記露光装置の前記長手方向の前記両端部で前記第一位置決め部材の近傍にそれぞれ設けられており、
前記第二弾性部材は、前記取付部の近傍で前記保持部材に設けられていることを特徴とする請求項1に記載の画像形成装置。
【請求項3】
前記第二位置決め部材は、前記保持部材の長手方向の両端部にそれぞれ設けられていることを特徴とする請求項1又は2に記載の画像形成装置。
【請求項4】
前記露光装置の前記第一位置決め部材は、前記保持部材の前記第二位置決め部材の間に配置されていることを特徴とする請求項3に記載の画像形成装置。
【請求項5】
前記露光装置の前記長手方向の前記両端部において前記像担持体と前記露光装置との間の光軸方向の距離を前記第一位置決め部材により調整する第一調整部材と、
前記露光装置の前記取付部において前記像担持体と前記露光装置との間の前記光軸方向の距離を前記第二位置決め部材により調整する第二調整部材と
を有することを特徴とする請求項1乃至4のいずれか一項に記載の画像形成装置。
【請求項6】
前記保持部材は、前記第二調整部材が前記第二位置決め部材により前記露光装置の前記取付部において前記像担持体と前記露光装置との間の前記光軸方向の前記距離を調整するときに、前記露光装置を前記長手方向に湾曲させるために必要な剛性を有することを特徴とする請求項5に記載の画像形成装置。
【請求項7】
前記露光装置が前記長手方向に湾曲したときに、前記第一弾性部材は、前記第一位置決め部材の位置決め状態を保持することができる付勢力を有することを特徴とする請求項6に記載の画像形成装置。
【請求項8】
前記露光装置は、前記露光装置の光軸に直交する面内で回転可能に前記保持部材により保持されていることを特徴とする請求項1乃至7のいずれか一項に記載の画像形成装置。
【請求項9】
前記露光装置の回転量を調整する回転量調整部材を有することを特徴とする請求項8に記載の画像形成装置。
【請求項10】
前記露光装置が回転させられたときに、前記露光装置の前記両端部または一端部は、前記第一弾性部材により、前記露光装置の回転量に従って前記像担持体へ向けて変位させられて、前記第一位置決め部材の位置決め状態を保持することを特徴とする請求項8又は9に記載の画像形成装置。
【請求項1】
記録媒体に画像を形成する画像形成装置であって、
像担持体と、
前記像担持体の長手方向に並んで設けられ前記像担持体の表面を露光するために画像情報に従って発光する複数個の発光素子を有する露光装置と、
前記露光装置の長手方向の両端部に設けられ、前記両端部のそれぞれにおいて前記像担持体に対して前記露光装置を位置決めする第一位置決め部材と、
前記第一位置決め部材の位置決め状態を保持するために前記露光装置を前記像担持体へ向けて付勢する第一弾性部材と、
前記露光装置の前記第一位置決め部材の間の取付部で前記露光装置を保持する保持部材と、
前記保持部材に設けられ、前記取付部において前記像担持体に対して前記露光装置を位置決めするために、前記像担持体に対して前記保持部材を位置決めする第二位置決め部材と、
前記第二位置決め部材の位置決め状態を保持するために前記保持部材を前記像担持体へ向けて付勢する第二弾性部材と
を有することを特徴とする画像形成装置。
【請求項2】
前記第一弾性部材は、前記露光装置の前記長手方向の前記両端部で前記第一位置決め部材の近傍にそれぞれ設けられており、
前記第二弾性部材は、前記取付部の近傍で前記保持部材に設けられていることを特徴とする請求項1に記載の画像形成装置。
【請求項3】
前記第二位置決め部材は、前記保持部材の長手方向の両端部にそれぞれ設けられていることを特徴とする請求項1又は2に記載の画像形成装置。
【請求項4】
前記露光装置の前記第一位置決め部材は、前記保持部材の前記第二位置決め部材の間に配置されていることを特徴とする請求項3に記載の画像形成装置。
【請求項5】
前記露光装置の前記長手方向の前記両端部において前記像担持体と前記露光装置との間の光軸方向の距離を前記第一位置決め部材により調整する第一調整部材と、
前記露光装置の前記取付部において前記像担持体と前記露光装置との間の前記光軸方向の距離を前記第二位置決め部材により調整する第二調整部材と
を有することを特徴とする請求項1乃至4のいずれか一項に記載の画像形成装置。
【請求項6】
前記保持部材は、前記第二調整部材が前記第二位置決め部材により前記露光装置の前記取付部において前記像担持体と前記露光装置との間の前記光軸方向の前記距離を調整するときに、前記露光装置を前記長手方向に湾曲させるために必要な剛性を有することを特徴とする請求項5に記載の画像形成装置。
【請求項7】
前記露光装置が前記長手方向に湾曲したときに、前記第一弾性部材は、前記第一位置決め部材の位置決め状態を保持することができる付勢力を有することを特徴とする請求項6に記載の画像形成装置。
【請求項8】
前記露光装置は、前記露光装置の光軸に直交する面内で回転可能に前記保持部材により保持されていることを特徴とする請求項1乃至7のいずれか一項に記載の画像形成装置。
【請求項9】
前記露光装置の回転量を調整する回転量調整部材を有することを特徴とする請求項8に記載の画像形成装置。
【請求項10】
前記露光装置が回転させられたときに、前記露光装置の前記両端部または一端部は、前記第一弾性部材により、前記露光装置の回転量に従って前記像担持体へ向けて変位させられて、前記第一位置決め部材の位置決め状態を保持することを特徴とする請求項8又は9に記載の画像形成装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】

【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【公開番号】特開2012−223985(P2012−223985A)
【公開日】平成24年11月15日(2012.11.15)
【国際特許分類】
【出願番号】特願2011−93635(P2011−93635)
【出願日】平成23年4月20日(2011.4.20)
【出願人】(000001007)キヤノン株式会社 (59,756)
【Fターム(参考)】
【公開日】平成24年11月15日(2012.11.15)
【国際特許分類】
【出願日】平成23年4月20日(2011.4.20)
【出願人】(000001007)キヤノン株式会社 (59,756)
【Fターム(参考)】
[ Back to top ]