
画像形成装置
【課題】透明なシートでも画像不良を発生させることなくループ量を検知することのできる画像形成装置を提供する。
【解決手段】発光部及び発光部から発光され、シートにて反射した光を受ける受光部を備えた測距センサ101により、シートPのループを検知する。そして、シートPが測距センサ101の方向に所定量ループしたとき、定着装置14と二次転写部54の間に設けられた反射ガイド102を、シートPにより押圧し、発光部から発光された光を遮らない第1位置から、発光部から発光された光を遮って反射させ、受光部に向かわせる第2位置に移動させる。
【解決手段】発光部及び発光部から発光され、シートにて反射した光を受ける受光部を備えた測距センサ101により、シートPのループを検知する。そして、シートPが測距センサ101の方向に所定量ループしたとき、定着装置14と二次転写部54の間に設けられた反射ガイド102を、シートPにより押圧し、発光部から発光された光を遮らない第1位置から、発光部から発光された光を遮って反射させ、受光部に向かわせる第2位置に移動させる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、画像形成装置に関し、特にトナー像が転写されたシートを転写部と定着部との間でループを形成しながら搬送するものに関する。
【背景技術】
【0002】
従来、電子写真方式を用いた画像形成装置においては、像担持体上に形成されたトナー像を転写部にて転写材としてのシートに転写した後、シートを定着ローラを備えた定着部に導くことにより、シートを加熱し、トナー像をシート上に定着させるようにしている。
【0003】
このような従来の画像形成装置において、シートの長さによっては、シートの先端が定着部に進入したとき、後端部がまだ転写部を通過していない場合がある。通常、定着部のシート搬送速度と、転写部のシート搬送速度はほぼ等しく設定されているが、定着部に具備される定着ローラの熱膨張や固体差、あるいは経年変化により、定着部と転写部のシート搬送速度の間に差が生じる場合がある。
【0004】
ここで、定着部のシート搬送速度が転写部のシート搬送速度を上回る場合には、未定着トナー像を担持しているシートが定着部と転写部との間で定着部側に引っ張られるという現象が発生し、画像劣化を招く恐れがある。そこで、このようなシートが引っ張られるという現象を防ぐため、定着部と転写部との間にシート搬送速度差を設けることにより、転写部と定着部との間を搬送されるシートにループを形成し、シートを撓ませるようにしている。
【0005】
ところが、近年、画像形成装置に対して高速化が求められており、このため定着部には短時間に多くのシートが連続して搬送される。ここで、このように短時間に多くのシートが連続して搬送される場合、トナー像を定着させるためには定着温度を上げる必要がある。しかし、このように定着温度を上げた場合、搬送開始直後は転写部と定着部とのシート搬送速度差が所定範囲に収まっていても、連続プリント中に、定着ローラ外径の膨張ばらつきが従来以上に大きくなる。
【0006】
ここで、定着ローラ外径が大きくなると、定着部のシート搬送速度が増加し、定着ローラ外径が小さくなると、定着ローラのシート搬送速度が減少する。なお、転写ローラは、高速化しても熱負荷を受けないため、連続プリント中に外径が変化することはなく転写部のシート搬送速度は一定のままである。このように、高速化により定着部のシート搬送速度の変動が大きくなると、転写部と定着部の間のシートのループ量が大きく変動し、転写部と定着部との間でシートの引っ張り合いや、押し込み合いが生じ、転写時の画像の乱れや色ずれが発生する。
【0007】
そこで、従来は、例えば定着部と転写部との間に配された搬送ガイドにシートのループを検出するループ検出センサを設け、シートに形成されるループ量が一定となるように定着ローラの搬送速度を制御するようにした画像形成装置がある。なお、このような画像形成装置として、例えばループ検出センサとして非接触式の光学センサを用いたものがある(特許文献1参照)。そして、この画像形成装置では、光学センサによってループ量を連続測定して定着部のシート搬送速度にフィードバックすることにより、ループ量を目標ループ量となるようにしている。
【0008】
また、他の画像形成装置としては、ループ検出センサとして、シートのループ量に応じたアナログ電圧を出力するシート接触式のループ検知装置を備えたものがある(特許文献2参照)。このループ検知装置は、シートの下面に接触して回動する検知アームと、この検知アームに一体に連結された遮光フラグと、前後に配列された2つのフォトインタラプタを備えたものである。なお、この2つのフォトインタラプタは、シートのサイズ、材料、厚みに応じて選択される2種類の目標ループ量に対応している。
【0009】
そして、この画像形成装置では、通過するシートにより押圧されて回動する検知アームと一体に遮光フラグが回動する際、遮光フラグの同一の遮光縁を、前後に配列された2つのフォトインタラプタが順番に検知する。そして、このように2つのフォトインタラプタにより順番に検知されたループ量に基づいてループ量を目標ループ量となるようにしている。
【先行技術文献】
【特許文献】
【0010】
【特許文献1】特開2001−106380号公報
【特許文献2】特開2005−284019号公報
【発明の概要】
【発明が解決しようとする課題】
【0011】
しかし、このような従来の画像形成装置において、光学式センサを用いた場合、例えばOHTのような透明シートは、センサから発光された光が透過してしまい、シートのループ量を正確に検知することが困難であった。このため、透明シートを用いた場合には、転写−定着間における極度な引張りに伴う画像伸びや後端画像不良、或いは極度な撓みに伴うガイド擦れ等の不具合が発生することがあった。
【0012】
また、シート接触式のループ検知装置を用いた場合、透明シートのループ量を正確に検知することはできるが、フラグが常にシートと接触するため、シートのフラグとの摺擦部分に帯電に伴う画像ムラや画像擦れといった画像不良が発生することがあった。
【0013】
そこで、本発明は、このような現状に鑑みてなされたものであり、透明なシートでも画像不良を発生させることなくループ量を検知することのできる画像形成装置を提供することを目的とするものである。
【課題を解決するための手段】
【0014】
本発明は、画像形成部で形成されたトナー像をシートに転写する転写部と、前記転写部により転写されたトナー像をシートに定着させる定着部とを備え、トナー像が転写されたシートを前記定着部及び前記転写部のシート搬送速度の差により、前記転写部と前記定着部の間でループを形成させながら搬送する画像形成装置において、前記転写部と前記定着部の間に設けられ、発光部及び前記発光部から発光され、シートにて反射した光を受ける受光部を有する光学式センサと、前記転写部と前記定着部の間に設けられ、シートが前記光学式センサの方向に所定量ループしたとき、シートにより押圧されて前記発光部から発光された光を遮らない第1位置から、前記発光部から発光された光を遮って反射させ、前記受光部に向かわせる第2位置に移動する遮光部材と、前記光学式センサからの検知信号に基づいて前記定着部のシート搬送速度を制御する制御部と、を備え、前記光学式センサは、前記遮光部材が前記第2位置に移動した際には、前記遮光部材から反射した光を受けてシートのループを検知し、前記制御部は、前記光学式センサからの検知信号に基づいて、シートのループ量が所定範囲内に維持されるように前記定着部のシート搬送速度を制御することを特徴とする。
【発明の効果】
【0015】
本発明のように、シートが所定量ループしたとき、シートにより遮光部材を押圧して発光部から発光された光を遮って反射させ、受光部に向かわせる位置に移動させることにより、透明なシートでも画像不良を発生させることなくループ量を検知することができる。
【図面の簡単な説明】
【0016】
【図1】本発明の第1の実施の形態に係る画像形成装置の一例であるカラーレーザプリンタの概略構成を示す図。
【図2】上記カラーレーザプリンタに設けられたループ量検知装置の概略構成を示す図。
【図3】上記ループ量検知装置の設置位置を説明する図。
【図4】上記ループ量検知装置からの検知信号に基づいてループ量を制御する制御ブロック図。
【図5】(a)は、上記ループ量検知装置の検出距離と出力電圧値の関係を示す図、(b)はグロスと、グロスによる実際の測定距離とのズレ量の関係を示す図。
【図6】上記ループ量検知装置に設けられた反射ガイドの、シートを搬送する際の動き示す図。
【図7】上記ループ量検知装置の検知に基づくシートのループ量制御を示す図。
【図8】上記カラーレーザプリンタの普通紙を使用した際のループ量の時間推移の一例を示す図。
【図9】上記カラーレーザプリンタのOHTを使用した際のループ量制御方法を説明する図。
【図10】上記OHTを使用した際のシート及び反射ガイドの動きを示す図。
【図11】上記OHTを搬送した場合で、撓み(ループ量)が大きくなったときのループ量の時間推移を示す図。
【図12】本発明の第2の実施の形態に係る画像形成装置に設けられたループ量検知装置の概略構成を示す図。
【図13】上記ループ量検知装置の、シートのループ量に応じた赤外線検知の違いを説明する図。
【図14】上記ループ量検知装置の実際の赤外線検知を説明する図。
【図15】上記ループ量検知装置のOHTを使用した際の出力電圧の時間推移を示す図。
【図16】本発明の第3の実施の形態に係る画像形成装置に設けられたループ量検知装置の概略構成を示す図。
【図17】上記ループ量検知装置のOHTを使用した際、一つのジョブにおいて、引張りと撓みが生じた場合の出力電圧の時間推移を示す図。
【発明を実施するための形態】
【0017】
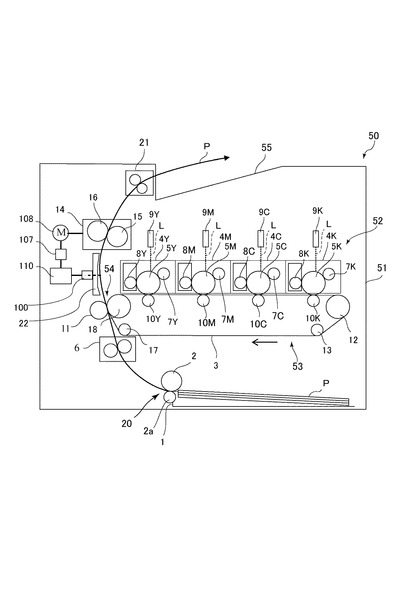
以下、本発明を実施するための形態について図面を用いて詳細に説明する。図1は、本発明の第1の実施の形態に係る画像形成装置の一例であるカラーレーザプリンタの概略構成を示す図である。図1において、50はカラーレーザプリンタ、51はカラーレーザプリンタ本体(以下、プリンタ本体という)である。このプリンタ本体51には、シートに画像を形成する画像形成部52が設けられている。
【0018】
ここで、画像形成部52は、それぞれイエロー、マゼンタ、シアン及びブラックの4色のトナー画像を担持する像担持体である感光体ドラム5(5Y,5M,5C,5K)が設けられている。感光体ドラム周囲には、感光体ドラム5の回転方向に沿って感光体ドラム表面を一様に帯電する一次帯電ローラ7(7Y,7M,7C,7K)が設けられている。なお、感光体ドラム5の上方には画像情報に基づいてレーザビームを照射して感光体ドラム上に静電潜像を形成するスキャナユニット9(9Y,9M,9C,9K)が設けられている。また、感光体ドラム5の周囲には、静電潜像にトナーを付着させてトナー像として顕像化する現像器8(8Y,8M,8C,8K)が設けられている。
【0019】
なお、本実施の形態においては、感光体ドラム5、一次帯電ローラ7、現像器8は一体的にカートリッジ化され、プロセスカートリッジ4(4Y,4M,4C,4K)を形成している。そして、このプロセスカートリッジ4の下方には、中間転写ベルトユニット53が配置されている。この中間転写ベルトユニット53は、誘電体製で、可撓性を有するエンドレスベルトである中間転写ベルト3と、中間転写ベルト3を循環移動させる駆動ローラ12と、テンションローラ13と、アイドラローラ17と、二次転写対向ローラ18を有している。
【0020】
ここで、中間転写ベルト3の材料としては、ポリイミド、ポリアミド、ポリカーボネート(PC)、ポリフッ化ビニリデン、ポリテトラフルオロエチレン重合体(PTFE)等が用いられる。なお、本実施の形態において、中間転写ベルト3は、カーボンブラックにより抵抗調整されたポリイミドからなり、体積抵抗率は、1×108Ω・cmであり、厚さは70μm、内周長は700mm、移動方向と直交する方向の幅は250mmである。さらに、中間転写ベルト3は、矢印方向にプロセススピード115mm/secで回転している。また、駆動ローラ12、二次転写対向ローラ18はφ24、テンションローラ13はφ16の構成となっている。
【0021】
この中間転写ベルト3は、各プロセスカートリッジ4の感光体ドラム5に当接しており、また中間転写ベルト3の内側には、一次転写ローラ10(10Y,10M,10C,10K)が中間転写ベルト3を介して感光体ドラム5と対向して配設されている。そして、この一次転写ローラ10によって後述するように静電的負荷バイアスが与えられることにより、各感光体ドラム5に形成されたトナー像が中間転写ベルト3に重ね合わせて転写され、この結果、中間転写ベルト上にフルカラーのトナー像が形成される。
【0022】
また、プリンタ本体51の下部には、シートカセット1に収容されたシートPを給送する給送ローラ2及び給送ローラ2と当接してシートPを分離する分離ローラ2aを備えたシート給送部20が配置されている。そして、このシート給送部20において、シートカセット1に収容されたシートPが給送ローラ2により、レジストローラ対6に送られる。この後、シートPは、レジストローラ対6により、トナー画像と同期するように二次転写ローラ11と中間転写ベルト3とにより形成される二次転写部54に給送される。なお、二次転写ローラ11は、弾性層にNBRヒドリンゴムを主成分とした半導電性スポンジを用いており、外径φ18で、芯金径φ6である。また、二次転写ローラ11に印加される二次転写バイアスは+1.5kV程度である。
【0023】
次に、このような構成のカラーレーザプリンタ50の画像形成動作について説明する。まず、プリンタ本体51に接続された不図示のコンピュータ若しくはLAN等のネットワークから画像情報が送られてくると、画像情報に応じてスキャナユニット9はレーザ光Lを発光する。そして、このレーザ光Lにより、一次帯電ローラ7によって表面が所定の極性・電位に一様に帯電されている感光体ドラム5の表面を露光する。
【0024】
これにより、感光体ドラム表面の露光部分は電荷が除去され、静電潜像が形成され、この静電潜像は、現像器8によってトナーが付着されてトナー像として現像される。なお、第1のプロセスカートリッジ4Yは、現像器8Yにイエローのトナーを収容しており、感光体ドラム5Yにイエロートナー像を形成する。同様に、第2のプロセスカートリッジ4Mは、現像器8Mにマゼンタのトナーを収容しており、感光体ドラム5Mにマゼンタトナー像を形成する。第3のプロセスカートリッジ4Cは現像器8Cにシアンのトナーを収容しており、感光体ドラム5Cにシアントナー像を形成する。第4のプロセスカートリッジ4Kは現像器8Kにブラックのトナーを収容しており、感光体ドラム5Kにブラックトナー像を形成する。
【0025】
次に、一次転写ローラ10により所定の加圧力及び静電的負荷バイアスが与えられ、中間転写ベルト3上に感光体ドラム上のトナー像が転写される。なお、各プロセスカートリッジ4による画像形成は、中間転写ベルト上に一次転写された上流のトナー像に重ね合わせるタイミングで行われる。この結果、最終的にはフルカラーのトナー像が中間転写ベルト3上に形成される。
【0026】
このような画像形成と同期して、シートカセット1から給送ローラ2及び分離ローラ2aによってシートPが1枚ずつレジストローラ対6に送られる。この後、レジストローラ対6により、二次転写ローラ11と中間転写ベルト3とにより構成される転写部である二次転写部54に搬送される。そして、二次転写ローラ11へのバイアス印加によって、中間転写ベルト3上のトナー像がシートPに転写される。さらにトナー像が転写されたシートPは、定着部である定着装置14に搬送され、定着ローラ15及び加圧ローラ16によって、加熱、加圧されてシートP上にトナー像が定着される。この後、トナー像が定着されたシートPは、排出ローラ対21によって排出トレイ55へ排出される。
【0027】
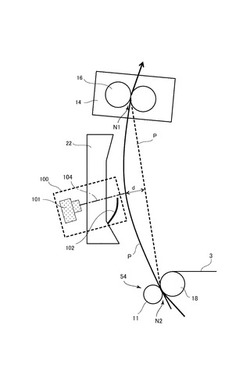
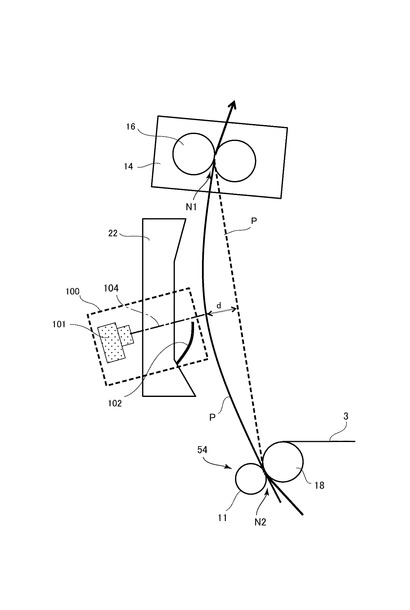
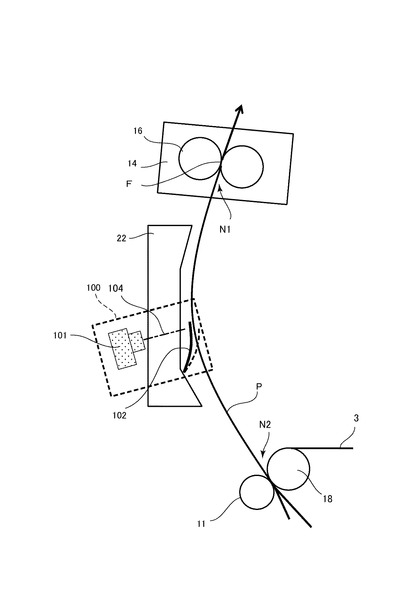
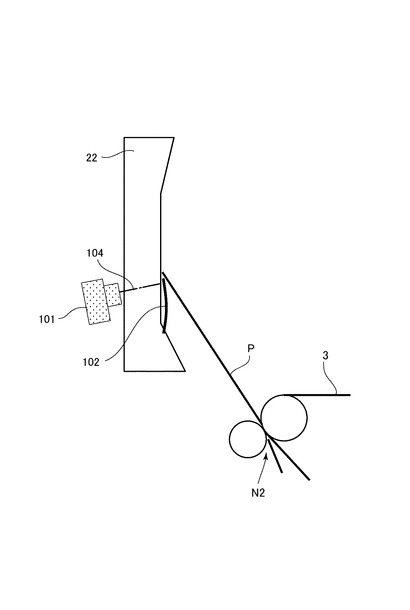
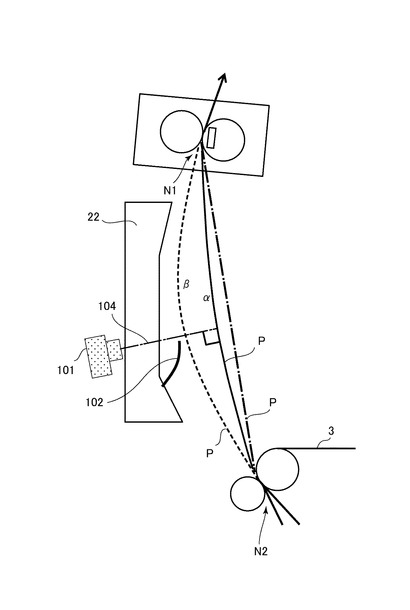
ところで、図1に示すように、二次転写部54と定着装置14の間には、シートPをガイドする搬送ガイド22と、二次転写部54と定着装置14との間を通過する際、シートPに生じるループ量を検知するループ量検知装置100が設けられている。そして、このループ量検知装置100は、図2に示すように、定着ニップN1と転写ニップN2との間にあるシートPとの距離を計測する光学式の非接触式センサである測距センサ101と、搬送ガイド22上に配置された反射ガイド102とを備えている。
【0028】
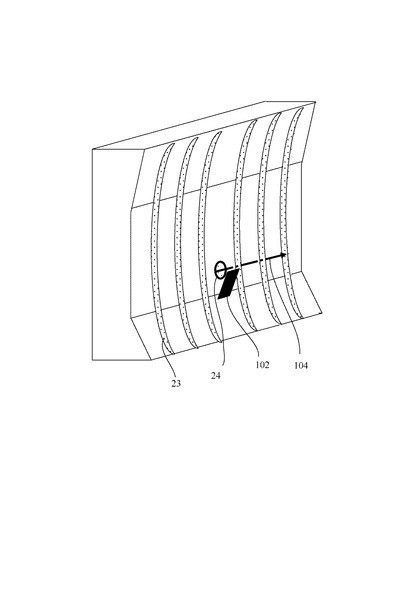
ここで、反射ガイド102は、図3に示すように、搬送ガイド22のシート搬送方向と直交する幅方向略中央部に設置されている。なお、図3において、23は搬送ガイド22に設けられた搬送ガイドリブであり、この搬送ガイドリブ23により、シートとの接触による帯電を避けてスムーズにシートPを搬送することができる。また、24は測距センサ101から発光された赤外線104を通過させるために搬送ガイド22に設けられた開口部である。
【0029】
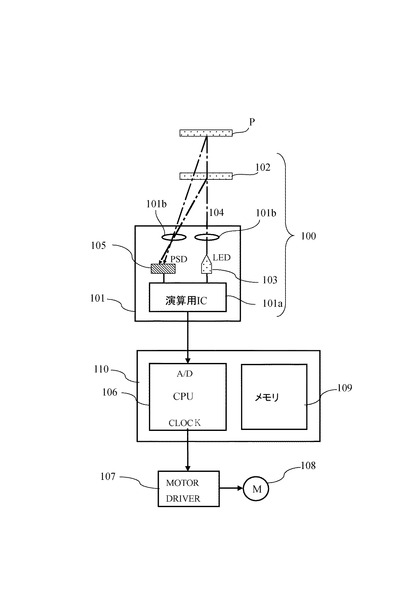
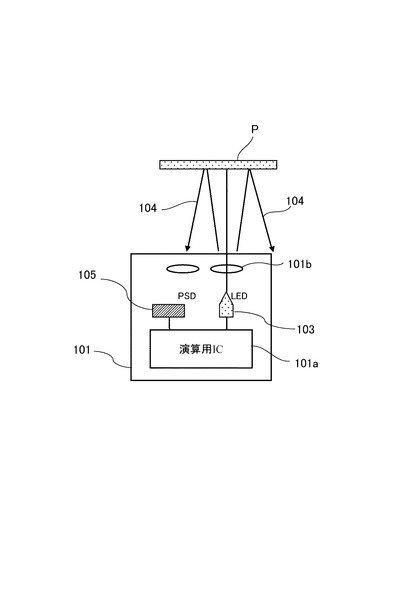
図4は、ループ量検知装置100からの検知信号に基づいてループ量を制御する制御ブロック図である。ループ量検知装置100には、LEDを備えた発光部103、PSD(位置検出素子)を備えた受光部105及び演算用IC101aを有し、シートPとの距離を計測してシートPのループを検知する光学式センサである測距センサ101が設けられている。そして、この測距センサ101では、発光部103から赤外線104を照射し、対象物体から反射された赤外線を受光部105で受け、演算用IC101aは、受光面上に到達した赤外線の分布中心の位置によって、三角測量方式で対象物体との距離を計測する。なお、図4において、101bはレンズである。
【0030】
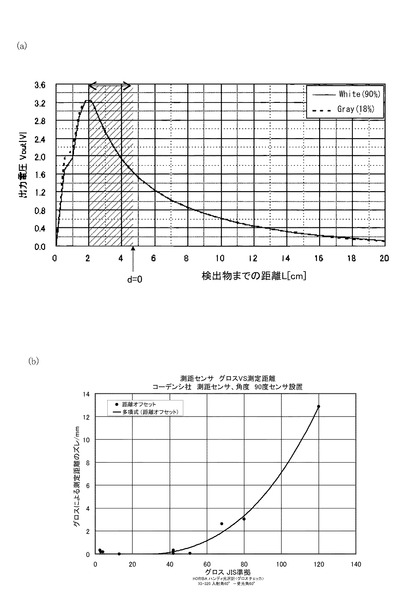
この後、演算用IC101aは、演算した距離情報を電圧値としてコントローラ110に出力する。ここで、この測距センサ101は、受光面への到達赤外線の分布中心の位置を検出して距離を演算するため、対象物体の表面状態により反射率が変化しても距離データには影響しない。図5の(a)は、検出距離と出力電圧値の関係を示す図である。なお、本実施の形態においては、図5の(a)において斜線で示す領域を使用し、搬送中の出力電圧としては約1.6V〜3.2Vでループ量検知を行う。
【0031】
ここで、制御部であるコントローラ110は、CPU106と、メモリ109を備えると共に、モータドライバ107を介して定着モータ108の回転速度を制御する。そして、このように定着モータ108の回転速度を制御することにより、トナー像が転写されたシートを定着装置14及び二次転写部54のシート搬送速度の差により、定着装置14及び二次転写部54の間で所定範囲内の大きさのループを形成させながら搬送する。
【0032】
そして、演算用IC101aにより出力された距離情報(電圧値)は、CPU106によりA/D変換されることにより距離に応じたデジタル値に変換される。なお、メモリ109には、定着ニップN1と転写ニップN2との間でのシートPの状態がループなしの場合、つまり図2の破線で示すシートPがピンと張った状態から、測距センサ101とシートPまでの距離、つまりループ量dに応じたデジタル値が格納されている。そして、変換されたデジタル値と、メモリ109に格納されているデジタル値によりCPU106は、シートPのループ量dを求めることができる。
【0033】
ところで、発光部103より発光された赤外線104は、通常は反射ガイド102に当たることなく既述した図3に示す開口部24を通過し、その先に搬送されるシートPによって反射(主に乱反射)し、この後、受光部105により受光される。しかし、例えばシートがOHTのような透明シートの場合、赤外線がシートを透過してしまうため、赤外線は反射せず、このため受光部105は赤外線を受けることができない。
【0034】
そこで、本実施の形態においては、図6に示すように、遮光部材である反射ガイド102を、シートPが所定量以上のループを形成した場合は、シートにより押圧されてシートに向かう赤外線104を遮る位置まで弾性的に撓ませるようにしている。つまり、反射ガイド102を、シートPが測距センサ101の方向に所定量ループしたとき、シートにより押圧されて撓ませて赤外線104を遮らない第1位置から、赤外線104を遮って反射させる第2位置に移動するようにしている。
【0035】
そして、反射ガイド102により赤外線104を遮った場合、赤外線104は反射ガイド102に当たって反射し、反射した赤外線104を受光部105が受けとることにより、測距センサ101から反射ガイド102までの距離を検知することができる。このようにシートPが所定量以上のループを形成した場合、反射ガイド102を撓ませて赤外線104を反射させることにより、反射ガイド102までの距離を検知することができ、この結果、透明シートの場合でも、正確なループ量dを検知することができる。
【0036】
なお、このような機能を有するため、反射ガイド102は、シートPとの接触面が平滑で、かつ赤外線を適度に乱反射させるような表面粗さを持つことが好ましい。このため、本実施の形態において、反射ガイド102は、厚み0.5mmのポリエステル材を用いており、これによりシートPとの接触面側を平滑にして摺動による不具合を抑えつつ、反射面側を適度に粗くして赤外線の乱反射を可能としている。
【0037】
ここで、本発明者の検討によれば、グロスによる実際の測定距離とのズレ量をなくすためには、反射面側の粗さをグロス値で示す場合、図5の(b)に示すように、グロス値50以下であることが望ましい。このため、本実施の形態においてはグロス値45の反射ガイドを使用している。なお、このグロス値の測定は、HORIBAハンディ光沢計IG−320(グロスJIS準拠)により行った。
【0038】
また、既述した図4に示すメモリ109内には、シートの種類に応じた搬送モード毎にループ量の目標ループ量dtが格納されている。そして、後述する制御に従い、実際のループ量dが、図7に示す目標ループ量dtとなるように、図4に示すモータドライバ107にCPU106からクロック信号を出力し定着モータ108の回転速度を制御する。
【0039】
次に、定着モータ108の回転速度制御方法について説明する。本実施の形態においては、PI制御によって定着モータ108の回転速度である定着速度の増減を行っており、この制御は、シートPの先端が定着ニップN1に突入した瞬間から開始する。本制御は、実際のループ量dの、目標ループ量dtからの偏差eを0に収束させるための制御であり、制御の基本式は下式(式1)にて表わされる。つまり、定着モータ108の回転速度制御は、ループ量dの目標ループ量dtからの偏差e、及びその積分値の2つの要素によって行われる。
MV=KP・e+Ki・∫e・dt+Ms・・・(式1)
MV:定着モータ108の実際の速度(モータ周波数)
e:実際のループ量と目標のループ量からの偏差(e=d−dt)
KP:比例制御の比例定数(eに応じて操作量を変更する比例係数)
Ki:積分制御の比例定数(∫eに応じて操作量を変更する比例係数)
Ms::定常時の操作量(e=0の時のモータ周波数:基本周波数)
【0040】
なお、上記の制御パラメータKP、Kiは、定着ローラ15が熱膨張することによる外径変動を考慮に入れて決定した。比例制御のパラメータであるKP(比例ゲイン)は、ループ量dのオーバーシュート及びハンチングが発生しない範囲で決定した。これは、オーバーシュートやハンチングが発生すると、シートPが転写ニップN2と定着ニップN1との間で引っ張られ、転写ニップN2で画像ズレ等が発生するためである。そして、比例制御だけでは、目標値に達しないまま残ってしまう目標ループ量dtからの偏差e(オフセット)に関しては、積分制御で除去するようにパラメータKiを決定した。
【0041】
ここで、積分制御を加えると、オフセットがある限り出力変更が積み重なるので、最終的には、オフセットを除去し、目標値に収束することが可能となる。Ki決定の際にも、ループ量dのオーバーシュート及びハンチングが発生しない範囲で決定した。これにより、シートPが転写ニップN2と定着ニップN1の両方に挟持搬送されている制御区間において、ループ量dは単調に減少し且つ、シートPの後端が転写ニップを抜ける前に、目標ループ量dtに収束する。
【0042】
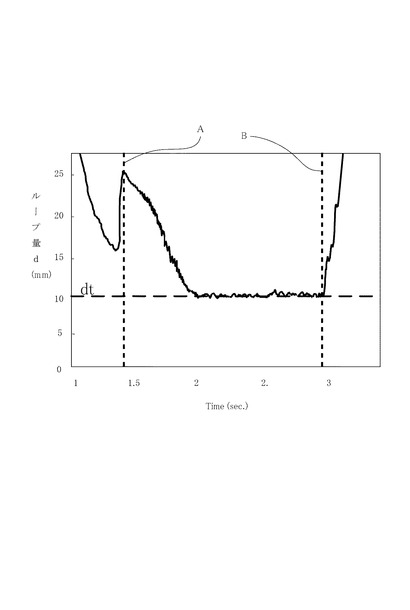
図8は、本制御を用いて普通紙(XEROX製 Business4200 75g)を搬送した際の、ループ量dの時間推移の一例を示す図である。図8のAは、シート先端が定着ニップN1に突入するタイミングであり、定着モータ108の制御開始タイミングに相当する。このAの時点では、ループ量dが約25mmであり、この時は、図6に示すようにシートPに押圧された反射ガイド102による乱反射を利用してループ量を検知している。そして、既述したPI制御によって約0.5secで、目標ループ量dt(本実施の形態では10mm)に収束していることが分かる。
【0043】
この制御の途中(本実施の形態では、d=約18mm)、シートが反射ガイド102から離れ、この後、シートによる乱反射を利用してループ量dを検知している。つまり、検知対象物が反射ガイド102からシートPに変わる。しかし、この場合、図8に示すように検知ループ量に殆ど影響が無いことが分かる。Bは、シート後端が転写ニップN2を抜けるタイミングであり、制御終了タイミングに相当する。この図8から、上記したPI制御により、ループ量dは目標ループ量dtに収束し、目標ループ量dtを維持した状態でシートの後端が転写ニップN2を抜けていることが分かる。
【0044】
次に、シートとして透明シートの一例であるOHT(3M製 CG3300)を使用した際のループ量制御方法について、図9を用いて説明する。OHTを使用した場合においても、普通紙と同様に、シート先端が転写ニップN2を過ぎて反射ガイド102を押し下げた時点で、反射ガイド102からの反射によってループ量dが検出される。しかし、図10に示すように、シートPの先端が図10に示すαに達したとき、シートPが反射ガイド102から離れ、この瞬間、赤外線104がシートPを透過し、ループ量検知が不能となる。本発明者の検討によれば、測距センサ101からの赤外線104をシートPに照射した場合の、それまでの出力電圧は約0.8Vである。
【0045】
つまり、シートがOHTの場合、シート搬送中に出力電圧の急激な減少が発生する。言い換えれば、OHTの場合、シート搬送中に、測距センサ101の出力電圧が所定の割合よりも大きな割合で減少する。従って、例えばユーザーが予めシート設定をOHTとしない場合でも、CPU106は、シートPが反射ガイド102から離れた瞬間の出力電圧の急激な減少から、シートPは透明シートであるOHTであると判断することができる。
【0046】
ここで、コントローラ110内のメモリ109には、予めOHTを搬送する場合の定着モータ108の回転速度が記憶されている。そして、CPU106は、シートPがOHTであると判断すると、モータドライバ107に、OHTを搬送する場合に決められたクロック信号を送ることによって、目標ループ量dtとなるように定着モータ108の回転速度を予測制御する。
【0047】
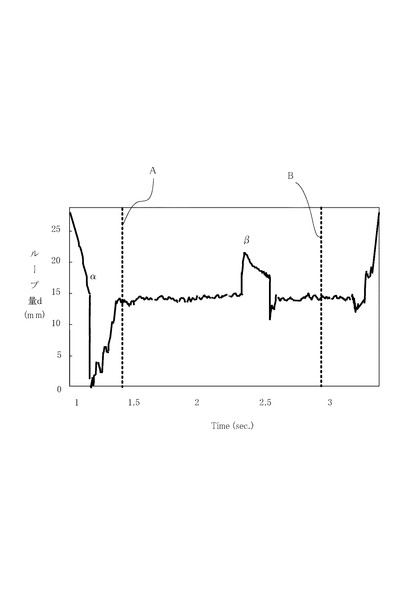
図11は、OHTを搬送した場合で、撓み(ループ量)が大きくなったときのループ量dの時間推移を示す図である。図11において、OHTが反射ガイド102と離れた瞬間がαの位置に相当し、シートがOHTと判断した以降は、ループ量d=10となるように定着モータ108の予測制御を行っている。
【0048】
実際には、普通紙と同様に、図11のAで示すシート先端が定着ニップN1に突入するタイミングで定着モータ108の制御を開始している。また、搬送途中でループ量dが所定のループ量(本実施の形態では約18mm)以上に大きくなった場合、シートが再び、既述した図6に示すように反射ガイド102を押し下げるようになる。これに伴い、図11のβに示すように再度反射ガイド102の乱反射によって出力電圧が上昇する。そして、このように出力電圧が上昇することにより、つまり再度、反射ガイド102の乱反射を利用することにより、正確なループ量を検知することができる。
【0049】
このとき、上述したようにCPU106によって定着モータ108の回転速度を増速させる制御を行うことにより、再度、ループ量を安定させることができる。なお、本実施の形態においては、シートのループ量dが15〜18mmの範囲内にあるときはループ量が安定していると判断し、これよりもループ量が大きくなった場合には即座に反射ガイド102を利用して撓みを防ぐような制御になっている。このようにして、OHTのような透明シートを搬送する場合においても、転写−定着間で極端なループを発生させることなく、安定したシートの搬送が可能となる。
【0050】
以上説明したように、本実施の形態では、光学式の測距センサ101と反射ガイド102を組み合わせるようにしている。そして、例えばOHTのような透明シートを搬送する場合、シートが転写−定着間で所定以上のループ量を形成した際には、シートにより反射ガイドを押圧するようにしている。これにより、光学式の測距センサ101は、反射ガイドからの反射を利用して正確なループを検知することができ、CPU106は正確なループ量を検知することができる。この結果、シートの種類にかかわらず、安定した所望のループ量を実現することができ、搬送ガイドに擦れることによるシートの帯電や、これに伴う画像不良、或いはスリップといった不具合を防止することができる。
【0051】
ところで、本実施の形態においては、主にシートのループ量が大きい場合に、定着モータ108の速度を増速させることにより、安定したループ量を形成するようにしている。しかし、定着速度は、定着装置14の熱による加圧ローラ16の膨張や収縮、或いはシートPの表面状態等によって大きく影響を受ける。そして、例えば加圧ローラ16が急激に熱膨張した場合、シートPの引張りが発生し、これに伴いシートのループ量が減少するので、このような場合でも正確なループ量を検知する必要がある。
【0052】
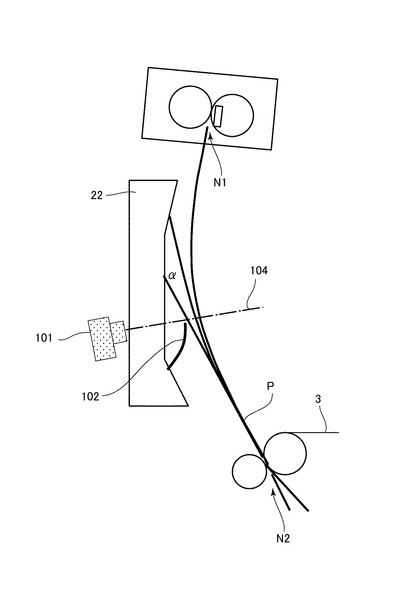
次に、このようなシートが過度に引っ張られた場合においても、正確なループ量を検知するようにした本発明の第2の実施の形態について説明する。図12は、本実施の形態に係る画像形成装置に設けられた測距センサ101の構成を示す図であり、図12において、既述した図2と同一符号は、同一又は相当部分を示している。
【0053】
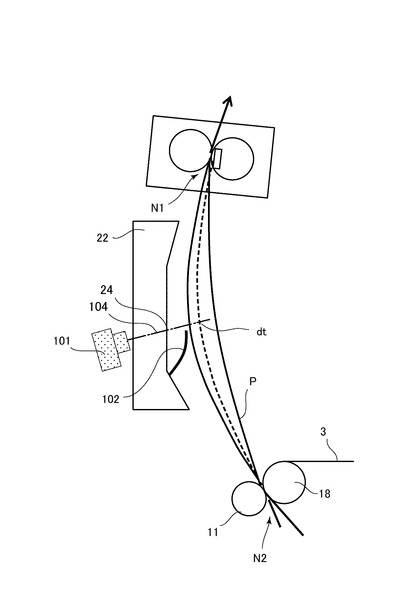
ここで、本実施の形態においては、図12に示すように、測距センサ101を、ループ量dが所定範囲内の所定の値(本実施の形態においては約5mm)となったαの状態の時に、赤外線104とシートPの接線とのなす角度が略90°となるように設置している。そして、このような位置に測距センサ101を設置することにより、シートとしてOHTを使用する際、シートPの正反射を利用してループを検知し、この検知結果に基づきCPU106は正確なループ量を検知することができる。
【0054】
なお、このαの状態は、図13の(a)に示すように、赤外線104からシートPに向けた垂線軸をZ方向とすると、シート搬送方向(X方向)とZ方向でなすXZ面に対して、シートPの長手方向(Y方向)とのなす角度が90°となる状態である。そして、このような状態のとき、XZ面において、発光部103から発光された赤外線104が、シートPの主に正反射を利用して受光部105にて読み取られる。
【0055】
一方、シートPが図12のβの状態のとき、すなわちループ量dが所定の値でないとき、図13の(b)に示すように、受光部105は、シートPの正反射を受けることができない。但し、実際には、発光部103から発光された赤外線は、図14に示すようにある程度の発光角度を持っているため、αの状態に対して5°程度の角度であれば受光部105は、多少の光を受けることになる。本発明者の検討によれば、主にシートPの正反射を利用した時の最大の出力電圧は1.3Vである。
【0056】
次に、シートPとしてOHTを搬送した際、シートPが転写−定着間で引張られたときの制御について説明する。シートPがOHTの場合、既述した図9に示すようにシート先端が転写ニップN2を通過して反射ガイド102を押し下げた時点で、反射ガイド102からの反射によってループ量dが検出される。
【0057】
しかし、既述した図10に示すように、シートPが反射ガイド102から離れた瞬間、赤外線104がシートPを透過するようになって受光部105における出力電圧が大幅に減少し、この時点でCPU106は、シートPがOHT(透明シート)と判断する。なお、コントローラ110内のメモリ109には、予めシートPがOHTの場合の定着モータ108の回転速度、及びOHTを搬送する際の出力電圧の変動を記憶している。
【0058】
図15は、出力電圧の時間推移を示す図である。シートPが徐々に引張られた場合、ループ量dが所定の値に次第に近づくようになり、これに伴い出力電圧は、図15に示すように、通常の出力電圧(0.8V)に対し、αに示すように次第に上昇する。そして、ループ量dが所定の値となると、図15のβに示すように出力電圧が最大となる。また、この後、シートが更に引張られると、ループ量dが所定の値を超えるようになり、これに伴い、今度は図15のγに示すように出力電圧が次第に下降する。
【0059】
このとき、すなわち出力電圧が最大となった後、出力電圧が下降すると、CPU106は、シートの状態を「引張り」と判断する。なお、本実施の形態では、0.2〜0.5secで0.4〜0.7V出力電圧が上昇し、下降した時点で「引張り」と判断している。そして、このように「引張り」と判断すると、CPU106は、定着モータ108に対して回転速度を減速させる制御を行い、これにより再び安定したループ量に戻すようにする。
【0060】
以上説明したように、本実施の形態では、測距センサ101を用いてループ検知を行い、主に透明シートの正反射を利用して出力変動を認識することによって、透明シートの「引張り」を正確に検知することができる。そして、このように「引張り」を正確に検知することにより、透明シートを搬送する場合においても、転写−定着間で極端な引張りを発生させることなく、安定してシートを搬送ことができる。これにより、シートの種類にかかわらず、引張りに伴う転写ブレといった不具合を防止することができる。なお、本実施の形態においては、赤外線104が発光部から受光部に向かう線が図13のXZ面となるような向きに測距センサ101を設置してあるが、これは既述した図14に示すような赤外線の発光角度や性能等に応じて適宜変更できる。
【0061】
ところで、これまで説明した第1実施の形態においては、透明シートを搬送する際のシートの転写−定着間の撓みを正確に検知することにより、安定したループ量を実現させていた。また、第2実施の形態においては、透明シートを搬送する際のシートの転写−定着間の引張りを正確に検知することにより、安定したループ量を実現させていた。つまり、これまで説明した第1及び第2実施の形態においては、透明シートを搬送する際の、転写−定着間の撓みと引張りを正確に検知することによって、それぞれ個別に安定したループ量を実現させていた。しかし、本発明は、これに限らず、転写−定着間のシートの撓みと引張りの両方を検知するようにしても良い。
【0062】
次に、このような転写−定着間のシートの撓みと引張りの両方を検知するようにした本発明の第3の実施の形態について説明する。図16は、本実施の形態に係る画像形成装置に設けられたループ量検知装置の概略構成を示す図であり、図16において、既述した図2と同一符号は、同一又は相当部分を示している。
【0063】
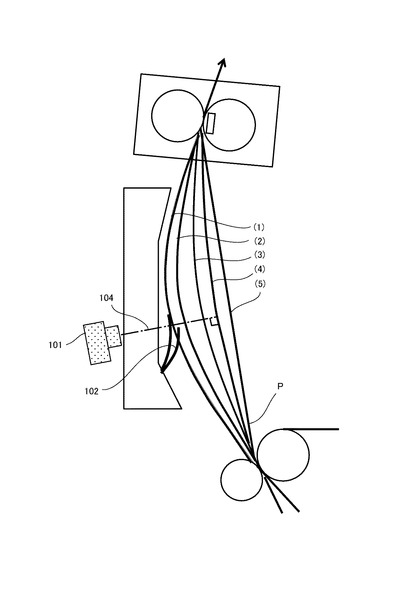
ここで、図16は、シートPとしてOHTを用いた場合の、転写−定着間におけるシートPのループの状態を示している。ここで、本実施の形態においては、シートPを搬送した際の撓みと引張りとの間で、明確な出力電圧の閾値を設け、挙動の傾向を読み取ることによって、転写−定着間のOHTの撓みと引張りの両方を検知するようにしている。具体的には、搬送されたシートがOHT(透明シート)と判断した場合、OHTの通常の出力電圧に対して、段階的に所定領域の上昇を示し、下降を始めた場合は「引張り」と判断し、急激に所定値以上の上昇を示した場合は「撓み」と判断する。
【0064】
また、図17は、シートを搬送した際の一つのジョブにおいて、引張りと撓みが生じた場合の出力電圧の時間推移を示している。そして、本実施の形態の場合、シートPがOHTの場合、シートPの通常の出力電圧値0.8Vに対して、段階的(0.2〜0.5sec)に0.4〜0.7V出力電圧が上昇し、且つ下降し始めた場合は「引張り」と判断する。また、0.2sec以下で0.7V以上の急激な上昇を示した場合は「撓み」と判断する。
【0065】
例えば、図16において、搬送するシートPのループが(2)、(3)の状態のときは、ループ量検知装置は、ループ量を確実に検知することはできないものの、不具合の無い安定した画像を提供することができる。このときの出力電圧値は約0.8Vである。また、図17においてαは、図16における(3)の地点を示しており、シートPの主に正反射による赤外線を受けはじめた瞬間にあたる。そして、この後、図17に示すように、この地点αから、段階的に出力電圧が上昇している。
【0066】
また、図17においてβは、図16における(4)の地点を示しており、このときシートの主に正反射による赤外線の受光のピークとなり、出力電圧の頂上にあたる。このとき、αとβの出力電圧の差は約0.5Vである。この後、さらにシートが引張られて図16の(5)に示す地点に達し、これに伴い徐々に出力電圧値が下降して所定の出力電圧値となると、シートの状態が「引張り」であると判断し、定着モータ108に対して回転速度を減速させる制御を行う。
【0067】
次に、このように定着モータ108の回転速度を減速させると、図16のループが大きくなる。なお、このとき図16における(2)の地点までは通常の出力電圧(0.8V)を示すが、シートPが図16における(1)の地点まで撓むと、シートが反射ガイド102を押圧する。そして、このように定着速度が徐々に遅くなり、シートPが反射ガイド102を押圧すると、反射ガイド102が赤外線104を遮り、測距センサ101が急激に反射ガイド102からの赤外線104を受ける。
【0068】
なお、このようにシートが反射ガイド102を押圧するのが、図17のγの地点であり、このとき出力電圧が0.1sec未満で急激に上昇している。このときのγの上昇Δが所定電圧0.8Vを超える1.1Vであることから、CPU106は、シートの状態が「撓み」、すなわちループ量が増加したと判断し、定着モータ108に対して回転速度を増速させる制御を行う。このように、一つのジョブにおいて、転写−定着間でシートの撓みと引張りの両方を確実に検知することができる。
【0069】
以上説明したように、本実施の形態によれば、測距センサ101を用いてループ量検知を行い、OHTのような透明シートを搬送する場合においても、出力電圧の変動に応じて「引張り」と「撓み」を判断することができる。そして、このように「引張り」と「撓み」を正確に検知し、これに応じた定着速度の制御を行うことによって、常に最適なループ制御を行うことができる。この結果、シートの種類にかかわらず、転写−定着間で極端な引張りと「撓み」を発生させることなく、安定してシートを搬送することができる。
【0070】
なお、これまでの説明においては、感光体ドラム5に形成されたトナー像を中間転写ベルト3に一次転写した後、二次転写部54でシートに一次転写する構成の画像形成装置について説明したが、本発明は、これに限らない。感光体ドラム5に形成されたトナー像をシートに直接写する構成の画像形成装置に適用することもできる。
【符号の説明】
【0071】
14…定着装置、50…カラーレーザプリンタ、51…カラーレーザプリンタ本体、52…画像形成部、54…二次転写部、100…ループ量検知装置、101…測距センサ、101a…演算用IC、102…反射ガイド、103…発光部、104…赤外線、105…受光部、108…定着モータ、110…コントローラ、d…ループ量、dt…目標ループ量、N1…定着ニップ、N2…転写ニップ、P…シート
【技術分野】
【0001】
本発明は、画像形成装置に関し、特にトナー像が転写されたシートを転写部と定着部との間でループを形成しながら搬送するものに関する。
【背景技術】
【0002】
従来、電子写真方式を用いた画像形成装置においては、像担持体上に形成されたトナー像を転写部にて転写材としてのシートに転写した後、シートを定着ローラを備えた定着部に導くことにより、シートを加熱し、トナー像をシート上に定着させるようにしている。
【0003】
このような従来の画像形成装置において、シートの長さによっては、シートの先端が定着部に進入したとき、後端部がまだ転写部を通過していない場合がある。通常、定着部のシート搬送速度と、転写部のシート搬送速度はほぼ等しく設定されているが、定着部に具備される定着ローラの熱膨張や固体差、あるいは経年変化により、定着部と転写部のシート搬送速度の間に差が生じる場合がある。
【0004】
ここで、定着部のシート搬送速度が転写部のシート搬送速度を上回る場合には、未定着トナー像を担持しているシートが定着部と転写部との間で定着部側に引っ張られるという現象が発生し、画像劣化を招く恐れがある。そこで、このようなシートが引っ張られるという現象を防ぐため、定着部と転写部との間にシート搬送速度差を設けることにより、転写部と定着部との間を搬送されるシートにループを形成し、シートを撓ませるようにしている。
【0005】
ところが、近年、画像形成装置に対して高速化が求められており、このため定着部には短時間に多くのシートが連続して搬送される。ここで、このように短時間に多くのシートが連続して搬送される場合、トナー像を定着させるためには定着温度を上げる必要がある。しかし、このように定着温度を上げた場合、搬送開始直後は転写部と定着部とのシート搬送速度差が所定範囲に収まっていても、連続プリント中に、定着ローラ外径の膨張ばらつきが従来以上に大きくなる。
【0006】
ここで、定着ローラ外径が大きくなると、定着部のシート搬送速度が増加し、定着ローラ外径が小さくなると、定着ローラのシート搬送速度が減少する。なお、転写ローラは、高速化しても熱負荷を受けないため、連続プリント中に外径が変化することはなく転写部のシート搬送速度は一定のままである。このように、高速化により定着部のシート搬送速度の変動が大きくなると、転写部と定着部の間のシートのループ量が大きく変動し、転写部と定着部との間でシートの引っ張り合いや、押し込み合いが生じ、転写時の画像の乱れや色ずれが発生する。
【0007】
そこで、従来は、例えば定着部と転写部との間に配された搬送ガイドにシートのループを検出するループ検出センサを設け、シートに形成されるループ量が一定となるように定着ローラの搬送速度を制御するようにした画像形成装置がある。なお、このような画像形成装置として、例えばループ検出センサとして非接触式の光学センサを用いたものがある(特許文献1参照)。そして、この画像形成装置では、光学センサによってループ量を連続測定して定着部のシート搬送速度にフィードバックすることにより、ループ量を目標ループ量となるようにしている。
【0008】
また、他の画像形成装置としては、ループ検出センサとして、シートのループ量に応じたアナログ電圧を出力するシート接触式のループ検知装置を備えたものがある(特許文献2参照)。このループ検知装置は、シートの下面に接触して回動する検知アームと、この検知アームに一体に連結された遮光フラグと、前後に配列された2つのフォトインタラプタを備えたものである。なお、この2つのフォトインタラプタは、シートのサイズ、材料、厚みに応じて選択される2種類の目標ループ量に対応している。
【0009】
そして、この画像形成装置では、通過するシートにより押圧されて回動する検知アームと一体に遮光フラグが回動する際、遮光フラグの同一の遮光縁を、前後に配列された2つのフォトインタラプタが順番に検知する。そして、このように2つのフォトインタラプタにより順番に検知されたループ量に基づいてループ量を目標ループ量となるようにしている。
【先行技術文献】
【特許文献】
【0010】
【特許文献1】特開2001−106380号公報
【特許文献2】特開2005−284019号公報
【発明の概要】
【発明が解決しようとする課題】
【0011】
しかし、このような従来の画像形成装置において、光学式センサを用いた場合、例えばOHTのような透明シートは、センサから発光された光が透過してしまい、シートのループ量を正確に検知することが困難であった。このため、透明シートを用いた場合には、転写−定着間における極度な引張りに伴う画像伸びや後端画像不良、或いは極度な撓みに伴うガイド擦れ等の不具合が発生することがあった。
【0012】
また、シート接触式のループ検知装置を用いた場合、透明シートのループ量を正確に検知することはできるが、フラグが常にシートと接触するため、シートのフラグとの摺擦部分に帯電に伴う画像ムラや画像擦れといった画像不良が発生することがあった。
【0013】
そこで、本発明は、このような現状に鑑みてなされたものであり、透明なシートでも画像不良を発生させることなくループ量を検知することのできる画像形成装置を提供することを目的とするものである。
【課題を解決するための手段】
【0014】
本発明は、画像形成部で形成されたトナー像をシートに転写する転写部と、前記転写部により転写されたトナー像をシートに定着させる定着部とを備え、トナー像が転写されたシートを前記定着部及び前記転写部のシート搬送速度の差により、前記転写部と前記定着部の間でループを形成させながら搬送する画像形成装置において、前記転写部と前記定着部の間に設けられ、発光部及び前記発光部から発光され、シートにて反射した光を受ける受光部を有する光学式センサと、前記転写部と前記定着部の間に設けられ、シートが前記光学式センサの方向に所定量ループしたとき、シートにより押圧されて前記発光部から発光された光を遮らない第1位置から、前記発光部から発光された光を遮って反射させ、前記受光部に向かわせる第2位置に移動する遮光部材と、前記光学式センサからの検知信号に基づいて前記定着部のシート搬送速度を制御する制御部と、を備え、前記光学式センサは、前記遮光部材が前記第2位置に移動した際には、前記遮光部材から反射した光を受けてシートのループを検知し、前記制御部は、前記光学式センサからの検知信号に基づいて、シートのループ量が所定範囲内に維持されるように前記定着部のシート搬送速度を制御することを特徴とする。
【発明の効果】
【0015】
本発明のように、シートが所定量ループしたとき、シートにより遮光部材を押圧して発光部から発光された光を遮って反射させ、受光部に向かわせる位置に移動させることにより、透明なシートでも画像不良を発生させることなくループ量を検知することができる。
【図面の簡単な説明】
【0016】
【図1】本発明の第1の実施の形態に係る画像形成装置の一例であるカラーレーザプリンタの概略構成を示す図。
【図2】上記カラーレーザプリンタに設けられたループ量検知装置の概略構成を示す図。
【図3】上記ループ量検知装置の設置位置を説明する図。
【図4】上記ループ量検知装置からの検知信号に基づいてループ量を制御する制御ブロック図。
【図5】(a)は、上記ループ量検知装置の検出距離と出力電圧値の関係を示す図、(b)はグロスと、グロスによる実際の測定距離とのズレ量の関係を示す図。
【図6】上記ループ量検知装置に設けられた反射ガイドの、シートを搬送する際の動き示す図。
【図7】上記ループ量検知装置の検知に基づくシートのループ量制御を示す図。
【図8】上記カラーレーザプリンタの普通紙を使用した際のループ量の時間推移の一例を示す図。
【図9】上記カラーレーザプリンタのOHTを使用した際のループ量制御方法を説明する図。
【図10】上記OHTを使用した際のシート及び反射ガイドの動きを示す図。
【図11】上記OHTを搬送した場合で、撓み(ループ量)が大きくなったときのループ量の時間推移を示す図。
【図12】本発明の第2の実施の形態に係る画像形成装置に設けられたループ量検知装置の概略構成を示す図。
【図13】上記ループ量検知装置の、シートのループ量に応じた赤外線検知の違いを説明する図。
【図14】上記ループ量検知装置の実際の赤外線検知を説明する図。
【図15】上記ループ量検知装置のOHTを使用した際の出力電圧の時間推移を示す図。
【図16】本発明の第3の実施の形態に係る画像形成装置に設けられたループ量検知装置の概略構成を示す図。
【図17】上記ループ量検知装置のOHTを使用した際、一つのジョブにおいて、引張りと撓みが生じた場合の出力電圧の時間推移を示す図。
【発明を実施するための形態】
【0017】
以下、本発明を実施するための形態について図面を用いて詳細に説明する。図1は、本発明の第1の実施の形態に係る画像形成装置の一例であるカラーレーザプリンタの概略構成を示す図である。図1において、50はカラーレーザプリンタ、51はカラーレーザプリンタ本体(以下、プリンタ本体という)である。このプリンタ本体51には、シートに画像を形成する画像形成部52が設けられている。
【0018】
ここで、画像形成部52は、それぞれイエロー、マゼンタ、シアン及びブラックの4色のトナー画像を担持する像担持体である感光体ドラム5(5Y,5M,5C,5K)が設けられている。感光体ドラム周囲には、感光体ドラム5の回転方向に沿って感光体ドラム表面を一様に帯電する一次帯電ローラ7(7Y,7M,7C,7K)が設けられている。なお、感光体ドラム5の上方には画像情報に基づいてレーザビームを照射して感光体ドラム上に静電潜像を形成するスキャナユニット9(9Y,9M,9C,9K)が設けられている。また、感光体ドラム5の周囲には、静電潜像にトナーを付着させてトナー像として顕像化する現像器8(8Y,8M,8C,8K)が設けられている。
【0019】
なお、本実施の形態においては、感光体ドラム5、一次帯電ローラ7、現像器8は一体的にカートリッジ化され、プロセスカートリッジ4(4Y,4M,4C,4K)を形成している。そして、このプロセスカートリッジ4の下方には、中間転写ベルトユニット53が配置されている。この中間転写ベルトユニット53は、誘電体製で、可撓性を有するエンドレスベルトである中間転写ベルト3と、中間転写ベルト3を循環移動させる駆動ローラ12と、テンションローラ13と、アイドラローラ17と、二次転写対向ローラ18を有している。
【0020】
ここで、中間転写ベルト3の材料としては、ポリイミド、ポリアミド、ポリカーボネート(PC)、ポリフッ化ビニリデン、ポリテトラフルオロエチレン重合体(PTFE)等が用いられる。なお、本実施の形態において、中間転写ベルト3は、カーボンブラックにより抵抗調整されたポリイミドからなり、体積抵抗率は、1×108Ω・cmであり、厚さは70μm、内周長は700mm、移動方向と直交する方向の幅は250mmである。さらに、中間転写ベルト3は、矢印方向にプロセススピード115mm/secで回転している。また、駆動ローラ12、二次転写対向ローラ18はφ24、テンションローラ13はφ16の構成となっている。
【0021】
この中間転写ベルト3は、各プロセスカートリッジ4の感光体ドラム5に当接しており、また中間転写ベルト3の内側には、一次転写ローラ10(10Y,10M,10C,10K)が中間転写ベルト3を介して感光体ドラム5と対向して配設されている。そして、この一次転写ローラ10によって後述するように静電的負荷バイアスが与えられることにより、各感光体ドラム5に形成されたトナー像が中間転写ベルト3に重ね合わせて転写され、この結果、中間転写ベルト上にフルカラーのトナー像が形成される。
【0022】
また、プリンタ本体51の下部には、シートカセット1に収容されたシートPを給送する給送ローラ2及び給送ローラ2と当接してシートPを分離する分離ローラ2aを備えたシート給送部20が配置されている。そして、このシート給送部20において、シートカセット1に収容されたシートPが給送ローラ2により、レジストローラ対6に送られる。この後、シートPは、レジストローラ対6により、トナー画像と同期するように二次転写ローラ11と中間転写ベルト3とにより形成される二次転写部54に給送される。なお、二次転写ローラ11は、弾性層にNBRヒドリンゴムを主成分とした半導電性スポンジを用いており、外径φ18で、芯金径φ6である。また、二次転写ローラ11に印加される二次転写バイアスは+1.5kV程度である。
【0023】
次に、このような構成のカラーレーザプリンタ50の画像形成動作について説明する。まず、プリンタ本体51に接続された不図示のコンピュータ若しくはLAN等のネットワークから画像情報が送られてくると、画像情報に応じてスキャナユニット9はレーザ光Lを発光する。そして、このレーザ光Lにより、一次帯電ローラ7によって表面が所定の極性・電位に一様に帯電されている感光体ドラム5の表面を露光する。
【0024】
これにより、感光体ドラム表面の露光部分は電荷が除去され、静電潜像が形成され、この静電潜像は、現像器8によってトナーが付着されてトナー像として現像される。なお、第1のプロセスカートリッジ4Yは、現像器8Yにイエローのトナーを収容しており、感光体ドラム5Yにイエロートナー像を形成する。同様に、第2のプロセスカートリッジ4Mは、現像器8Mにマゼンタのトナーを収容しており、感光体ドラム5Mにマゼンタトナー像を形成する。第3のプロセスカートリッジ4Cは現像器8Cにシアンのトナーを収容しており、感光体ドラム5Cにシアントナー像を形成する。第4のプロセスカートリッジ4Kは現像器8Kにブラックのトナーを収容しており、感光体ドラム5Kにブラックトナー像を形成する。
【0025】
次に、一次転写ローラ10により所定の加圧力及び静電的負荷バイアスが与えられ、中間転写ベルト3上に感光体ドラム上のトナー像が転写される。なお、各プロセスカートリッジ4による画像形成は、中間転写ベルト上に一次転写された上流のトナー像に重ね合わせるタイミングで行われる。この結果、最終的にはフルカラーのトナー像が中間転写ベルト3上に形成される。
【0026】
このような画像形成と同期して、シートカセット1から給送ローラ2及び分離ローラ2aによってシートPが1枚ずつレジストローラ対6に送られる。この後、レジストローラ対6により、二次転写ローラ11と中間転写ベルト3とにより構成される転写部である二次転写部54に搬送される。そして、二次転写ローラ11へのバイアス印加によって、中間転写ベルト3上のトナー像がシートPに転写される。さらにトナー像が転写されたシートPは、定着部である定着装置14に搬送され、定着ローラ15及び加圧ローラ16によって、加熱、加圧されてシートP上にトナー像が定着される。この後、トナー像が定着されたシートPは、排出ローラ対21によって排出トレイ55へ排出される。
【0027】
ところで、図1に示すように、二次転写部54と定着装置14の間には、シートPをガイドする搬送ガイド22と、二次転写部54と定着装置14との間を通過する際、シートPに生じるループ量を検知するループ量検知装置100が設けられている。そして、このループ量検知装置100は、図2に示すように、定着ニップN1と転写ニップN2との間にあるシートPとの距離を計測する光学式の非接触式センサである測距センサ101と、搬送ガイド22上に配置された反射ガイド102とを備えている。
【0028】
ここで、反射ガイド102は、図3に示すように、搬送ガイド22のシート搬送方向と直交する幅方向略中央部に設置されている。なお、図3において、23は搬送ガイド22に設けられた搬送ガイドリブであり、この搬送ガイドリブ23により、シートとの接触による帯電を避けてスムーズにシートPを搬送することができる。また、24は測距センサ101から発光された赤外線104を通過させるために搬送ガイド22に設けられた開口部である。
【0029】
図4は、ループ量検知装置100からの検知信号に基づいてループ量を制御する制御ブロック図である。ループ量検知装置100には、LEDを備えた発光部103、PSD(位置検出素子)を備えた受光部105及び演算用IC101aを有し、シートPとの距離を計測してシートPのループを検知する光学式センサである測距センサ101が設けられている。そして、この測距センサ101では、発光部103から赤外線104を照射し、対象物体から反射された赤外線を受光部105で受け、演算用IC101aは、受光面上に到達した赤外線の分布中心の位置によって、三角測量方式で対象物体との距離を計測する。なお、図4において、101bはレンズである。
【0030】
この後、演算用IC101aは、演算した距離情報を電圧値としてコントローラ110に出力する。ここで、この測距センサ101は、受光面への到達赤外線の分布中心の位置を検出して距離を演算するため、対象物体の表面状態により反射率が変化しても距離データには影響しない。図5の(a)は、検出距離と出力電圧値の関係を示す図である。なお、本実施の形態においては、図5の(a)において斜線で示す領域を使用し、搬送中の出力電圧としては約1.6V〜3.2Vでループ量検知を行う。
【0031】
ここで、制御部であるコントローラ110は、CPU106と、メモリ109を備えると共に、モータドライバ107を介して定着モータ108の回転速度を制御する。そして、このように定着モータ108の回転速度を制御することにより、トナー像が転写されたシートを定着装置14及び二次転写部54のシート搬送速度の差により、定着装置14及び二次転写部54の間で所定範囲内の大きさのループを形成させながら搬送する。
【0032】
そして、演算用IC101aにより出力された距離情報(電圧値)は、CPU106によりA/D変換されることにより距離に応じたデジタル値に変換される。なお、メモリ109には、定着ニップN1と転写ニップN2との間でのシートPの状態がループなしの場合、つまり図2の破線で示すシートPがピンと張った状態から、測距センサ101とシートPまでの距離、つまりループ量dに応じたデジタル値が格納されている。そして、変換されたデジタル値と、メモリ109に格納されているデジタル値によりCPU106は、シートPのループ量dを求めることができる。
【0033】
ところで、発光部103より発光された赤外線104は、通常は反射ガイド102に当たることなく既述した図3に示す開口部24を通過し、その先に搬送されるシートPによって反射(主に乱反射)し、この後、受光部105により受光される。しかし、例えばシートがOHTのような透明シートの場合、赤外線がシートを透過してしまうため、赤外線は反射せず、このため受光部105は赤外線を受けることができない。
【0034】
そこで、本実施の形態においては、図6に示すように、遮光部材である反射ガイド102を、シートPが所定量以上のループを形成した場合は、シートにより押圧されてシートに向かう赤外線104を遮る位置まで弾性的に撓ませるようにしている。つまり、反射ガイド102を、シートPが測距センサ101の方向に所定量ループしたとき、シートにより押圧されて撓ませて赤外線104を遮らない第1位置から、赤外線104を遮って反射させる第2位置に移動するようにしている。
【0035】
そして、反射ガイド102により赤外線104を遮った場合、赤外線104は反射ガイド102に当たって反射し、反射した赤外線104を受光部105が受けとることにより、測距センサ101から反射ガイド102までの距離を検知することができる。このようにシートPが所定量以上のループを形成した場合、反射ガイド102を撓ませて赤外線104を反射させることにより、反射ガイド102までの距離を検知することができ、この結果、透明シートの場合でも、正確なループ量dを検知することができる。
【0036】
なお、このような機能を有するため、反射ガイド102は、シートPとの接触面が平滑で、かつ赤外線を適度に乱反射させるような表面粗さを持つことが好ましい。このため、本実施の形態において、反射ガイド102は、厚み0.5mmのポリエステル材を用いており、これによりシートPとの接触面側を平滑にして摺動による不具合を抑えつつ、反射面側を適度に粗くして赤外線の乱反射を可能としている。
【0037】
ここで、本発明者の検討によれば、グロスによる実際の測定距離とのズレ量をなくすためには、反射面側の粗さをグロス値で示す場合、図5の(b)に示すように、グロス値50以下であることが望ましい。このため、本実施の形態においてはグロス値45の反射ガイドを使用している。なお、このグロス値の測定は、HORIBAハンディ光沢計IG−320(グロスJIS準拠)により行った。
【0038】
また、既述した図4に示すメモリ109内には、シートの種類に応じた搬送モード毎にループ量の目標ループ量dtが格納されている。そして、後述する制御に従い、実際のループ量dが、図7に示す目標ループ量dtとなるように、図4に示すモータドライバ107にCPU106からクロック信号を出力し定着モータ108の回転速度を制御する。
【0039】
次に、定着モータ108の回転速度制御方法について説明する。本実施の形態においては、PI制御によって定着モータ108の回転速度である定着速度の増減を行っており、この制御は、シートPの先端が定着ニップN1に突入した瞬間から開始する。本制御は、実際のループ量dの、目標ループ量dtからの偏差eを0に収束させるための制御であり、制御の基本式は下式(式1)にて表わされる。つまり、定着モータ108の回転速度制御は、ループ量dの目標ループ量dtからの偏差e、及びその積分値の2つの要素によって行われる。
MV=KP・e+Ki・∫e・dt+Ms・・・(式1)
MV:定着モータ108の実際の速度(モータ周波数)
e:実際のループ量と目標のループ量からの偏差(e=d−dt)
KP:比例制御の比例定数(eに応じて操作量を変更する比例係数)
Ki:積分制御の比例定数(∫eに応じて操作量を変更する比例係数)
Ms::定常時の操作量(e=0の時のモータ周波数:基本周波数)
【0040】
なお、上記の制御パラメータKP、Kiは、定着ローラ15が熱膨張することによる外径変動を考慮に入れて決定した。比例制御のパラメータであるKP(比例ゲイン)は、ループ量dのオーバーシュート及びハンチングが発生しない範囲で決定した。これは、オーバーシュートやハンチングが発生すると、シートPが転写ニップN2と定着ニップN1との間で引っ張られ、転写ニップN2で画像ズレ等が発生するためである。そして、比例制御だけでは、目標値に達しないまま残ってしまう目標ループ量dtからの偏差e(オフセット)に関しては、積分制御で除去するようにパラメータKiを決定した。
【0041】
ここで、積分制御を加えると、オフセットがある限り出力変更が積み重なるので、最終的には、オフセットを除去し、目標値に収束することが可能となる。Ki決定の際にも、ループ量dのオーバーシュート及びハンチングが発生しない範囲で決定した。これにより、シートPが転写ニップN2と定着ニップN1の両方に挟持搬送されている制御区間において、ループ量dは単調に減少し且つ、シートPの後端が転写ニップを抜ける前に、目標ループ量dtに収束する。
【0042】
図8は、本制御を用いて普通紙(XEROX製 Business4200 75g)を搬送した際の、ループ量dの時間推移の一例を示す図である。図8のAは、シート先端が定着ニップN1に突入するタイミングであり、定着モータ108の制御開始タイミングに相当する。このAの時点では、ループ量dが約25mmであり、この時は、図6に示すようにシートPに押圧された反射ガイド102による乱反射を利用してループ量を検知している。そして、既述したPI制御によって約0.5secで、目標ループ量dt(本実施の形態では10mm)に収束していることが分かる。
【0043】
この制御の途中(本実施の形態では、d=約18mm)、シートが反射ガイド102から離れ、この後、シートによる乱反射を利用してループ量dを検知している。つまり、検知対象物が反射ガイド102からシートPに変わる。しかし、この場合、図8に示すように検知ループ量に殆ど影響が無いことが分かる。Bは、シート後端が転写ニップN2を抜けるタイミングであり、制御終了タイミングに相当する。この図8から、上記したPI制御により、ループ量dは目標ループ量dtに収束し、目標ループ量dtを維持した状態でシートの後端が転写ニップN2を抜けていることが分かる。
【0044】
次に、シートとして透明シートの一例であるOHT(3M製 CG3300)を使用した際のループ量制御方法について、図9を用いて説明する。OHTを使用した場合においても、普通紙と同様に、シート先端が転写ニップN2を過ぎて反射ガイド102を押し下げた時点で、反射ガイド102からの反射によってループ量dが検出される。しかし、図10に示すように、シートPの先端が図10に示すαに達したとき、シートPが反射ガイド102から離れ、この瞬間、赤外線104がシートPを透過し、ループ量検知が不能となる。本発明者の検討によれば、測距センサ101からの赤外線104をシートPに照射した場合の、それまでの出力電圧は約0.8Vである。
【0045】
つまり、シートがOHTの場合、シート搬送中に出力電圧の急激な減少が発生する。言い換えれば、OHTの場合、シート搬送中に、測距センサ101の出力電圧が所定の割合よりも大きな割合で減少する。従って、例えばユーザーが予めシート設定をOHTとしない場合でも、CPU106は、シートPが反射ガイド102から離れた瞬間の出力電圧の急激な減少から、シートPは透明シートであるOHTであると判断することができる。
【0046】
ここで、コントローラ110内のメモリ109には、予めOHTを搬送する場合の定着モータ108の回転速度が記憶されている。そして、CPU106は、シートPがOHTであると判断すると、モータドライバ107に、OHTを搬送する場合に決められたクロック信号を送ることによって、目標ループ量dtとなるように定着モータ108の回転速度を予測制御する。
【0047】
図11は、OHTを搬送した場合で、撓み(ループ量)が大きくなったときのループ量dの時間推移を示す図である。図11において、OHTが反射ガイド102と離れた瞬間がαの位置に相当し、シートがOHTと判断した以降は、ループ量d=10となるように定着モータ108の予測制御を行っている。
【0048】
実際には、普通紙と同様に、図11のAで示すシート先端が定着ニップN1に突入するタイミングで定着モータ108の制御を開始している。また、搬送途中でループ量dが所定のループ量(本実施の形態では約18mm)以上に大きくなった場合、シートが再び、既述した図6に示すように反射ガイド102を押し下げるようになる。これに伴い、図11のβに示すように再度反射ガイド102の乱反射によって出力電圧が上昇する。そして、このように出力電圧が上昇することにより、つまり再度、反射ガイド102の乱反射を利用することにより、正確なループ量を検知することができる。
【0049】
このとき、上述したようにCPU106によって定着モータ108の回転速度を増速させる制御を行うことにより、再度、ループ量を安定させることができる。なお、本実施の形態においては、シートのループ量dが15〜18mmの範囲内にあるときはループ量が安定していると判断し、これよりもループ量が大きくなった場合には即座に反射ガイド102を利用して撓みを防ぐような制御になっている。このようにして、OHTのような透明シートを搬送する場合においても、転写−定着間で極端なループを発生させることなく、安定したシートの搬送が可能となる。
【0050】
以上説明したように、本実施の形態では、光学式の測距センサ101と反射ガイド102を組み合わせるようにしている。そして、例えばOHTのような透明シートを搬送する場合、シートが転写−定着間で所定以上のループ量を形成した際には、シートにより反射ガイドを押圧するようにしている。これにより、光学式の測距センサ101は、反射ガイドからの反射を利用して正確なループを検知することができ、CPU106は正確なループ量を検知することができる。この結果、シートの種類にかかわらず、安定した所望のループ量を実現することができ、搬送ガイドに擦れることによるシートの帯電や、これに伴う画像不良、或いはスリップといった不具合を防止することができる。
【0051】
ところで、本実施の形態においては、主にシートのループ量が大きい場合に、定着モータ108の速度を増速させることにより、安定したループ量を形成するようにしている。しかし、定着速度は、定着装置14の熱による加圧ローラ16の膨張や収縮、或いはシートPの表面状態等によって大きく影響を受ける。そして、例えば加圧ローラ16が急激に熱膨張した場合、シートPの引張りが発生し、これに伴いシートのループ量が減少するので、このような場合でも正確なループ量を検知する必要がある。
【0052】
次に、このようなシートが過度に引っ張られた場合においても、正確なループ量を検知するようにした本発明の第2の実施の形態について説明する。図12は、本実施の形態に係る画像形成装置に設けられた測距センサ101の構成を示す図であり、図12において、既述した図2と同一符号は、同一又は相当部分を示している。
【0053】
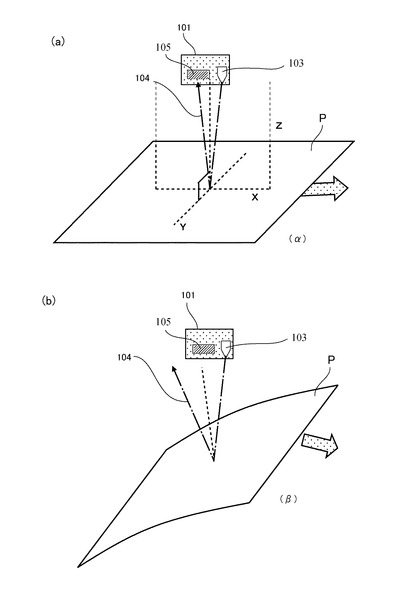
ここで、本実施の形態においては、図12に示すように、測距センサ101を、ループ量dが所定範囲内の所定の値(本実施の形態においては約5mm)となったαの状態の時に、赤外線104とシートPの接線とのなす角度が略90°となるように設置している。そして、このような位置に測距センサ101を設置することにより、シートとしてOHTを使用する際、シートPの正反射を利用してループを検知し、この検知結果に基づきCPU106は正確なループ量を検知することができる。
【0054】
なお、このαの状態は、図13の(a)に示すように、赤外線104からシートPに向けた垂線軸をZ方向とすると、シート搬送方向(X方向)とZ方向でなすXZ面に対して、シートPの長手方向(Y方向)とのなす角度が90°となる状態である。そして、このような状態のとき、XZ面において、発光部103から発光された赤外線104が、シートPの主に正反射を利用して受光部105にて読み取られる。
【0055】
一方、シートPが図12のβの状態のとき、すなわちループ量dが所定の値でないとき、図13の(b)に示すように、受光部105は、シートPの正反射を受けることができない。但し、実際には、発光部103から発光された赤外線は、図14に示すようにある程度の発光角度を持っているため、αの状態に対して5°程度の角度であれば受光部105は、多少の光を受けることになる。本発明者の検討によれば、主にシートPの正反射を利用した時の最大の出力電圧は1.3Vである。
【0056】
次に、シートPとしてOHTを搬送した際、シートPが転写−定着間で引張られたときの制御について説明する。シートPがOHTの場合、既述した図9に示すようにシート先端が転写ニップN2を通過して反射ガイド102を押し下げた時点で、反射ガイド102からの反射によってループ量dが検出される。
【0057】
しかし、既述した図10に示すように、シートPが反射ガイド102から離れた瞬間、赤外線104がシートPを透過するようになって受光部105における出力電圧が大幅に減少し、この時点でCPU106は、シートPがOHT(透明シート)と判断する。なお、コントローラ110内のメモリ109には、予めシートPがOHTの場合の定着モータ108の回転速度、及びOHTを搬送する際の出力電圧の変動を記憶している。
【0058】
図15は、出力電圧の時間推移を示す図である。シートPが徐々に引張られた場合、ループ量dが所定の値に次第に近づくようになり、これに伴い出力電圧は、図15に示すように、通常の出力電圧(0.8V)に対し、αに示すように次第に上昇する。そして、ループ量dが所定の値となると、図15のβに示すように出力電圧が最大となる。また、この後、シートが更に引張られると、ループ量dが所定の値を超えるようになり、これに伴い、今度は図15のγに示すように出力電圧が次第に下降する。
【0059】
このとき、すなわち出力電圧が最大となった後、出力電圧が下降すると、CPU106は、シートの状態を「引張り」と判断する。なお、本実施の形態では、0.2〜0.5secで0.4〜0.7V出力電圧が上昇し、下降した時点で「引張り」と判断している。そして、このように「引張り」と判断すると、CPU106は、定着モータ108に対して回転速度を減速させる制御を行い、これにより再び安定したループ量に戻すようにする。
【0060】
以上説明したように、本実施の形態では、測距センサ101を用いてループ検知を行い、主に透明シートの正反射を利用して出力変動を認識することによって、透明シートの「引張り」を正確に検知することができる。そして、このように「引張り」を正確に検知することにより、透明シートを搬送する場合においても、転写−定着間で極端な引張りを発生させることなく、安定してシートを搬送ことができる。これにより、シートの種類にかかわらず、引張りに伴う転写ブレといった不具合を防止することができる。なお、本実施の形態においては、赤外線104が発光部から受光部に向かう線が図13のXZ面となるような向きに測距センサ101を設置してあるが、これは既述した図14に示すような赤外線の発光角度や性能等に応じて適宜変更できる。
【0061】
ところで、これまで説明した第1実施の形態においては、透明シートを搬送する際のシートの転写−定着間の撓みを正確に検知することにより、安定したループ量を実現させていた。また、第2実施の形態においては、透明シートを搬送する際のシートの転写−定着間の引張りを正確に検知することにより、安定したループ量を実現させていた。つまり、これまで説明した第1及び第2実施の形態においては、透明シートを搬送する際の、転写−定着間の撓みと引張りを正確に検知することによって、それぞれ個別に安定したループ量を実現させていた。しかし、本発明は、これに限らず、転写−定着間のシートの撓みと引張りの両方を検知するようにしても良い。
【0062】
次に、このような転写−定着間のシートの撓みと引張りの両方を検知するようにした本発明の第3の実施の形態について説明する。図16は、本実施の形態に係る画像形成装置に設けられたループ量検知装置の概略構成を示す図であり、図16において、既述した図2と同一符号は、同一又は相当部分を示している。
【0063】
ここで、図16は、シートPとしてOHTを用いた場合の、転写−定着間におけるシートPのループの状態を示している。ここで、本実施の形態においては、シートPを搬送した際の撓みと引張りとの間で、明確な出力電圧の閾値を設け、挙動の傾向を読み取ることによって、転写−定着間のOHTの撓みと引張りの両方を検知するようにしている。具体的には、搬送されたシートがOHT(透明シート)と判断した場合、OHTの通常の出力電圧に対して、段階的に所定領域の上昇を示し、下降を始めた場合は「引張り」と判断し、急激に所定値以上の上昇を示した場合は「撓み」と判断する。
【0064】
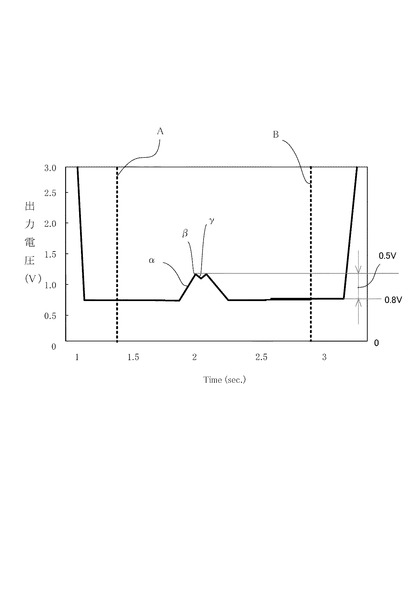
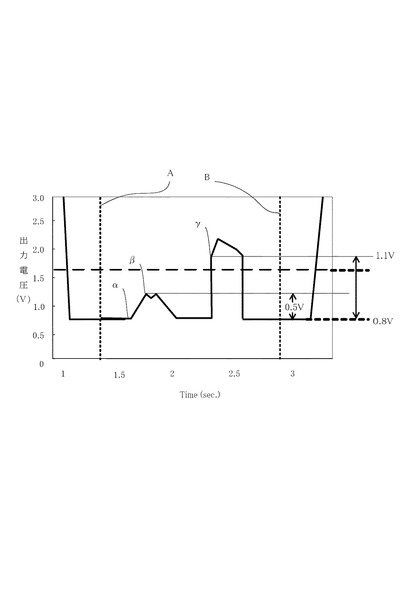
また、図17は、シートを搬送した際の一つのジョブにおいて、引張りと撓みが生じた場合の出力電圧の時間推移を示している。そして、本実施の形態の場合、シートPがOHTの場合、シートPの通常の出力電圧値0.8Vに対して、段階的(0.2〜0.5sec)に0.4〜0.7V出力電圧が上昇し、且つ下降し始めた場合は「引張り」と判断する。また、0.2sec以下で0.7V以上の急激な上昇を示した場合は「撓み」と判断する。
【0065】
例えば、図16において、搬送するシートPのループが(2)、(3)の状態のときは、ループ量検知装置は、ループ量を確実に検知することはできないものの、不具合の無い安定した画像を提供することができる。このときの出力電圧値は約0.8Vである。また、図17においてαは、図16における(3)の地点を示しており、シートPの主に正反射による赤外線を受けはじめた瞬間にあたる。そして、この後、図17に示すように、この地点αから、段階的に出力電圧が上昇している。
【0066】
また、図17においてβは、図16における(4)の地点を示しており、このときシートの主に正反射による赤外線の受光のピークとなり、出力電圧の頂上にあたる。このとき、αとβの出力電圧の差は約0.5Vである。この後、さらにシートが引張られて図16の(5)に示す地点に達し、これに伴い徐々に出力電圧値が下降して所定の出力電圧値となると、シートの状態が「引張り」であると判断し、定着モータ108に対して回転速度を減速させる制御を行う。
【0067】
次に、このように定着モータ108の回転速度を減速させると、図16のループが大きくなる。なお、このとき図16における(2)の地点までは通常の出力電圧(0.8V)を示すが、シートPが図16における(1)の地点まで撓むと、シートが反射ガイド102を押圧する。そして、このように定着速度が徐々に遅くなり、シートPが反射ガイド102を押圧すると、反射ガイド102が赤外線104を遮り、測距センサ101が急激に反射ガイド102からの赤外線104を受ける。
【0068】
なお、このようにシートが反射ガイド102を押圧するのが、図17のγの地点であり、このとき出力電圧が0.1sec未満で急激に上昇している。このときのγの上昇Δが所定電圧0.8Vを超える1.1Vであることから、CPU106は、シートの状態が「撓み」、すなわちループ量が増加したと判断し、定着モータ108に対して回転速度を増速させる制御を行う。このように、一つのジョブにおいて、転写−定着間でシートの撓みと引張りの両方を確実に検知することができる。
【0069】
以上説明したように、本実施の形態によれば、測距センサ101を用いてループ量検知を行い、OHTのような透明シートを搬送する場合においても、出力電圧の変動に応じて「引張り」と「撓み」を判断することができる。そして、このように「引張り」と「撓み」を正確に検知し、これに応じた定着速度の制御を行うことによって、常に最適なループ制御を行うことができる。この結果、シートの種類にかかわらず、転写−定着間で極端な引張りと「撓み」を発生させることなく、安定してシートを搬送することができる。
【0070】
なお、これまでの説明においては、感光体ドラム5に形成されたトナー像を中間転写ベルト3に一次転写した後、二次転写部54でシートに一次転写する構成の画像形成装置について説明したが、本発明は、これに限らない。感光体ドラム5に形成されたトナー像をシートに直接写する構成の画像形成装置に適用することもできる。
【符号の説明】
【0071】
14…定着装置、50…カラーレーザプリンタ、51…カラーレーザプリンタ本体、52…画像形成部、54…二次転写部、100…ループ量検知装置、101…測距センサ、101a…演算用IC、102…反射ガイド、103…発光部、104…赤外線、105…受光部、108…定着モータ、110…コントローラ、d…ループ量、dt…目標ループ量、N1…定着ニップ、N2…転写ニップ、P…シート
【特許請求の範囲】
【請求項1】
画像形成部で形成されたトナー像をシートに転写する転写部と、前記転写部により転写されたトナー像をシートに定着させる定着部とを備え、トナー像が転写されたシートを前記定着部及び前記転写部のシート搬送速度の差により、前記転写部と前記定着部の間でループを形成させながら搬送する画像形成装置において、
前記転写部と前記定着部の間に設けられ、発光部及び前記発光部から発光され、シートにて反射した光を受ける受光部を有する光学式センサと、
前記転写部と前記定着部の間に設けられ、シートが前記光学式センサの方向に所定量ループしたとき、シートにより押圧されて前記発光部から発光された光を遮らない第1位置から、前記発光部から発光された光を遮って反射させ、前記受光部に向かわせる第2位置に移動する遮光部材と、
前記光学式センサからの検知信号に基づいて前記定着部のシート搬送速度を制御する制御部と、を備え、
前記光学式センサは、前記遮光部材が前記第2位置に移動した際には、前記遮光部材から反射した光を受けてシートのループを検知し、前記制御部は、前記光学式センサからの検知信号に基づいて、シートのループ量が所定範囲内に維持されるように前記定着部のシート搬送速度を制御することを特徴とする画像形成装置。
【請求項2】
前記遮光部材は、シートにより押圧されて撓みながら前記第1位置から前記第2位置に移動することを特徴とする請求項1記載の画像形成装置。
【請求項3】
前記制御部は、前記遮光部材により反射した光を受けた前記受光部の出力電圧に基づいてシートのループ量を検知し、かつ前記受光部の出力電圧が所定の割合よりも大きな割合で減少した場合には、搬送されたシートが透明シートであると判断し、透明シートのループ量が前記所定範囲内に収まるよう前記定着部のシート搬送速度を制御することを特徴とする請求項1又は2記載の画像形成装置。
【請求項4】
前記光学式センサを、前記制御部で検知されたシートのループ量が前記所定範囲内の所定の値となるとき、前記発光部から発光された光とシートの接線とのなす角度が略90°となるように設置し、
前記制御部は、前記受光部の出力電圧が増加すると、シートが前記定着部により引っ張られている状態と判断し、前記定着部のシート搬送速度を減速させるよう制御することを特徴とする請求項3記載の画像形成装置。
【請求項5】
前記制御部は、前記受光部の出力電圧が増加した後、減少を始めたときにシートが前記定着部により引っ張られている状態と判断して前記定着部のシート搬送速度を減速させるよう制御し、前記受光部の出力電圧が増加して所定電圧を越えた場合には、シートのループ量が増加していると判断してシートのループ量が前記所定範囲内に収まるよう前記定着部のシート搬送速度を増速させるよう制御することを特徴とする請求項4記載の画像形成装置。
【請求項1】
画像形成部で形成されたトナー像をシートに転写する転写部と、前記転写部により転写されたトナー像をシートに定着させる定着部とを備え、トナー像が転写されたシートを前記定着部及び前記転写部のシート搬送速度の差により、前記転写部と前記定着部の間でループを形成させながら搬送する画像形成装置において、
前記転写部と前記定着部の間に設けられ、発光部及び前記発光部から発光され、シートにて反射した光を受ける受光部を有する光学式センサと、
前記転写部と前記定着部の間に設けられ、シートが前記光学式センサの方向に所定量ループしたとき、シートにより押圧されて前記発光部から発光された光を遮らない第1位置から、前記発光部から発光された光を遮って反射させ、前記受光部に向かわせる第2位置に移動する遮光部材と、
前記光学式センサからの検知信号に基づいて前記定着部のシート搬送速度を制御する制御部と、を備え、
前記光学式センサは、前記遮光部材が前記第2位置に移動した際には、前記遮光部材から反射した光を受けてシートのループを検知し、前記制御部は、前記光学式センサからの検知信号に基づいて、シートのループ量が所定範囲内に維持されるように前記定着部のシート搬送速度を制御することを特徴とする画像形成装置。
【請求項2】
前記遮光部材は、シートにより押圧されて撓みながら前記第1位置から前記第2位置に移動することを特徴とする請求項1記載の画像形成装置。
【請求項3】
前記制御部は、前記遮光部材により反射した光を受けた前記受光部の出力電圧に基づいてシートのループ量を検知し、かつ前記受光部の出力電圧が所定の割合よりも大きな割合で減少した場合には、搬送されたシートが透明シートであると判断し、透明シートのループ量が前記所定範囲内に収まるよう前記定着部のシート搬送速度を制御することを特徴とする請求項1又は2記載の画像形成装置。
【請求項4】
前記光学式センサを、前記制御部で検知されたシートのループ量が前記所定範囲内の所定の値となるとき、前記発光部から発光された光とシートの接線とのなす角度が略90°となるように設置し、
前記制御部は、前記受光部の出力電圧が増加すると、シートが前記定着部により引っ張られている状態と判断し、前記定着部のシート搬送速度を減速させるよう制御することを特徴とする請求項3記載の画像形成装置。
【請求項5】
前記制御部は、前記受光部の出力電圧が増加した後、減少を始めたときにシートが前記定着部により引っ張られている状態と判断して前記定着部のシート搬送速度を減速させるよう制御し、前記受光部の出力電圧が増加して所定電圧を越えた場合には、シートのループ量が増加していると判断してシートのループ量が前記所定範囲内に収まるよう前記定着部のシート搬送速度を増速させるよう制御することを特徴とする請求項4記載の画像形成装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【公開番号】特開2013−105125(P2013−105125A)
【公開日】平成25年5月30日(2013.5.30)
【国際特許分類】
【出願番号】特願2011−250446(P2011−250446)
【出願日】平成23年11月16日(2011.11.16)
【出願人】(000001007)キヤノン株式会社 (59,756)
【Fターム(参考)】
【公開日】平成25年5月30日(2013.5.30)
【国際特許分類】
【出願日】平成23年11月16日(2011.11.16)
【出願人】(000001007)キヤノン株式会社 (59,756)
【Fターム(参考)】
[ Back to top ]