
画像形成装置
【課題】感光体の長手方向の帯電斑が発生した場合でも、画像の濃度斑の発生を抑制することのできる画像形成装置を提供する。
【解決手段】画像形成装置は、放電電流を検出する放電電流検出手段30と、該検出手段30を感光体1の回転軸線方向に沿って移動させる移動手段40と、移動手段40により検出手段30を移動させて感光体1の回転軸線方向に沿う方向における放電電流分布を取得する取得手段と、該取得手段により取得された2つの放電電流分布を比較する比較手段と、比較手段による比較の結果、2つの放電電流分布の間で放電電流に所定量以上の差があると判断した領域については、対応する感光体1の回転軸線方向の位置を露光する際の画像濃度信号に対する露光装置の露光量を補正する補正手段と、を有する構成とする。
【解決手段】画像形成装置は、放電電流を検出する放電電流検出手段30と、該検出手段30を感光体1の回転軸線方向に沿って移動させる移動手段40と、移動手段40により検出手段30を移動させて感光体1の回転軸線方向に沿う方向における放電電流分布を取得する取得手段と、該取得手段により取得された2つの放電電流分布を比較する比較手段と、比較手段による比較の結果、2つの放電電流分布の間で放電電流に所定量以上の差があると判断した領域については、対応する感光体1の回転軸線方向の位置を露光する際の画像濃度信号に対する露光装置の露光量を補正する補正手段と、を有する構成とする。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、複写機、プリンター、ファクシミリ等の電子写真方式の画像形成装置に関するものである。
【背景技術】
【0002】
電子写真方式を用いた画像形成装置では、電子写真感光体(感光体)の表面を帯電させた後に、画像情報に応じて露光することにより、感光体の表面に静電潜像を形成する。感光体の表面を帯電させる方法としてコロナ帯電器を用いる方法が広く用いられている。
【0003】
コロナ帯電器は、一面が開放された支持筐体であるシールド(シールドケース)の両端部に配設された保持部材であるブロック間に、放電電極である放電ワイヤが展張された構成を有する。シールドは、代表的にはステンレス鋼(以下「SUS」ともいう。)で構成される。又、放電ワイヤは、タングステンなどの線材で構成される。コロナ帯電器を用いて被帯電体の被帯電面としての感光体の表面を帯電させる場合、シールドの開口部を感光体の表面に近接させた状態で対向させ、放電ワイヤに放電電流を供給してコロナ放電を発生させ、感光体の表面に電荷を付与する。
【0004】
感光体の表面の帯電電位は、放電ワイヤと感光体の表面との間にグリッド(グリッド電極)を設け、そのグリッドに印加するグリッドバイアスによって感光体の表面に付与する電荷量を調整することで制御される。グリッドとしては、主に、放電ワイヤと同種の材料又はSUSなどにより形成されたワイヤ形状のグリッドや、エッチングなどにより多数の孔が形成された多孔性(メッシュ状)の板状のグリッドが知られている。
【0005】
このようなコロナ帯電器を用いる場合、グリッドにトナー、トナーの外添剤、紙粉、エアロゾルなどの汚染物(異物)が付着する。このように、グリッドと異なる電気抵抗の物質(異物)が付着することによって、グリッドに電気抵抗斑が生じることがある。又、上述のような異物がグリッドのメッシュ状の開口を塞ぐことがある。そして、これらがコロナ帯電器における電界分布に影響を与え、感光体の長手方向の電位分布において帯電斑が発生することがある。
【0006】
上述のような異物の離形性は、コロナ放電によって発生する放電生成物によりグリッドの表面に放電生成物が生成することで悪化する。
【0007】
尚、上述のような異物は、放電ワイヤやシールドにも付着することがあり、それによってもコロナ帯電器における電界分布に影響を与え、感光体の長手方向の電位分布において帯電斑が発生することがある。感光体の長手方向の電位分布に最も影響するのはグリッドへの異物の付着であり、その次が放電ワイヤへの異物の付着であり、場合によってはシールドへの異物の付着も影響することがある。
【0008】
従来、このような課題に対して、コロナ帯電器内に清掃部材を配設し、この清掃部材を駆動手段などによって一定のタイミングにて駆動して、グリッドなどを清掃することが提案されている。
【0009】
例えば、特許文献1では、放電ワイヤに印加される電圧が閾値以上となった場合及びグリッドにリークする電流が所定値以下となった場合に放電ワイヤの清掃を行うことが提案されている。又、特許文献2では、複数の放電ワイヤを選択的に交換して使用できるように設け、放電ワイヤの放電の累積量(放電ワイヤの動作時間の積算値)が所定の上限に達した場合に使用する放電ワイヤを交換することが提案されている。又、特許文献3では、画像形成された用紙の累積枚数又は像担持体の回転処理累積時間が所定値以上になった場合に、放電ワイヤの清掃を促す表示を行うことが提案されている。
【0010】
尚、特許文献4は、副走査方向に対して濃度が変動している部分に対して露光量を補正することが記載されている。
【先行技術文献】
【特許文献】
【0011】
【特許文献1】特開2006−330648号公報
【特許文献2】特開2009−251382号公報
【特許文献3】特開2007−127901号公報
【特許文献4】特開2000−71515号公報
【発明の概要】
【発明が解決しようとする課題】
【0012】
上述のように、従来は、放電ワイヤの長手方向の全体を一つの検知対象としたり、単にコロナ帯電器の使用量と相関する値と閾値との比較結果に基づいて放電ワイヤを交換したり清掃したりしていた。
【0013】
しかしながら、上述のような異物によってグリッドなどがその長手方向において局所的に汚染されただけでも、コロナ帯電器における均一な電界形成に影響を与え、感光体の長手方向の電位分布を局所的に不均一にしてしまうこととなる。その結果、副走査方向のスジ(濃度斑)などとして画像不良が現れ、視感度的にも顕著に見えてしまうことがある。
【0014】
ところが、従来、コロナ帯電器の長手方向における放電電流分布を検出するものはなかったため、コロナ帯電器の長手方向において局所的に放電電流分布が不均一になっていることを見落としてしまう。そのため、感光体の長手方向の帯電斑を発生させ、副走査方向のスジ(濃度斑)などの画像不良を発生させてしまうことがある。又、単に定期的にコロナ帯電器を清掃するだけでは、リアルタイムなコロナ帯電器の長手方向における汚染部位の変化に対する追従性に劣る。そのため、その間にコロナ帯電器の長手方向において局所的に放電電流分布が不均一になった場合に、上述のような画像不良を発生させてしまうことがある。
【0015】
尚、上記特許文献4は、コロナ帯電器の長手方向における放電電流分布が局所的に不均一になることによる感光体の長手方向の電位斑については何ら記載していない。
【0016】
従って、本発明の目的は、感光体の長手方向の帯電斑が発生した場合でも、画像の濃度斑の発生を抑制することのできる画像形成装置を提供することである。
【課題を解決するための手段】
【0017】
上記目的は本発明に係る画像形成装置にて達成される。要約すれば、本発明は、回転可能な感光体と、前記感光体に対して放電を行う放電電極及び前記感光体との対向部に配置され前記感光体上の電位を制御する制御電極を備え前記感光体を帯電させる帯電器と、前記帯電器によって帯電させられた前記感光体を露光して静電潜像を形成する露光手段と、を有する画像形成装置において、前記感光体と前記帯電器との間に配置される検出部材により前記制御電極を通過した後の前記帯電器からの放電電流を検出する放電電流検出手段と、前記検出部材を前記感光体の回転軸線方向に沿って移動させる移動手段と、前記帯電器が放電を行っている間に前記移動手段により前記検出部材を移動させて前記放電電流検出手段によって前記帯電器からの放電電流を検出し、前記感光体の回転軸線方向に沿う方向における前記制御電極を通過した後の前記帯電器からの放電電流分布を取得する取得手段と、前記取得手段により取得された2つの前記放電電流分布を比較する比較手段と、前記比較手段による比較の結果、2つの前記放電電流分布の間で前記放電電流に所定量以上の差があると判断した領域については、対応する前記感光体の回転軸線方向の位置を露光する際の画像濃度信号に対する前記露光装置の露光量を補正する補正手段と、を有することを特徴とする画像形成装置である。
【発明の効果】
【0018】
本発明によれば、感光体の長手方向の帯電斑が発生した場合でも、画像の濃度斑の発生を抑制することができる。
【図面の簡単な説明】
【0019】
【図1】本発明の一実施例に係る画像形成装置の要部の断面図である。
【図2】本発明の一実施例に係る画像形成装置が備える帯電器の模式的な外観図である。
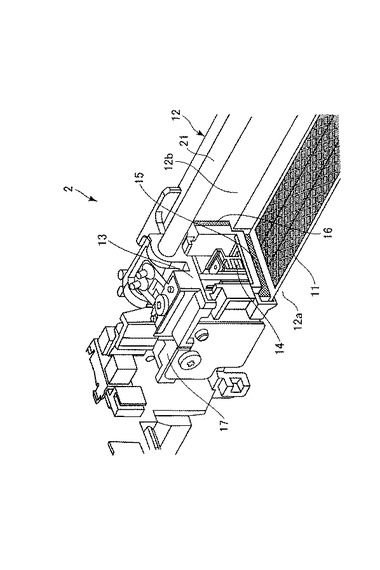
【図3】本発明の一実施例に係る画像形成装置が備える帯電器のシールドの内側をより詳しく示す斜視図である。
【図4】本発明の一実施例に係る画像形成装置が備える放電電流センサの概略構成図である。
【図5】本発明の一実施例に係る画像形成装置が備える放電電流センサの検出電極と感光ドラムとの位置関係を説明するための模式図である。
【図6】本発明の一実施例に係る画像形成装置が備える帯電器の模式的な側面図である。
【図7】本発明の一実施例に係る画像形成装置の制御態様を説明するためのブロック図である。
【図8】本発明の一実施例に係る画像形成装置における露光量制御の流れを説明するためのフローチャート図である。
【図9】本発明の一実施例に係る画像形成装置の露光量制御における各部の動作の一例を説明するためのシーケンスチャート図である。
【図10】本発明の一実施例に係る画像形成装置の露光量制御における各部の動作の他の例を説明するためのシーケンスチャート図である。
【図11】本発明の一実施例に係る画像形成装置の帯電器の長手方向における放電電流分布の検出結果を示すグラフ図である。
【図12】検出電圧の差分値と感光ドラムの電位変化量との関係を示すグラフ図である。
【図13】露光量レベルと潜像コントラスト量との関係を示すグラフ図である。
【図14】露光量補正の一例を説明するための模式図である。
【図15】本発明の他の実施例に係る画像形成装置が備える帯電器の模式的な側面図である。
【図16】本発明の他の実施例に係る画像形成装置が備える放電電流センサの概略構成図である。
【図17】本発明の他の実施例に係る画像形成装置の制御態様を説明するためのブロック図である。
【図18】本発明の他の実施例に係る画像形成装置の露光量制御における各部の動作の一例を説明するためのシーケンスチャート図である。
【図19】本発明の他の実施例に係る画像形成装置の露光量制御における各部の動作の他の例を説明するためのシーケンスチャート図である。
【図20】本発明の更に他の実施例に係る画像形成装置の操作パネルの表示部における表示を説明するための模式図である。。
【図21】本発明の更に他の実施例における画像形成装置とその他の情報機器との関連を示す模式図である。
【図22】本発明の更に他の実施例における画像形成装置とその他の情報機器の制御態様を示すブロック図である。
【図23】本発明の更に他の実施例における情報処理装置に対する分配情報図である。
【図24】本発明の更に他の実施例におけるホストコンピュータに対する分配情報図である。
【発明を実施するための形態】
【0020】
以下、本発明に係る画像形成装置を図面に則して更に詳しく説明する。
【0021】
実施例1
1.画像形成装置
先ず、本発明の一実施例に係る画像形成装置の全体構成及び動作について説明する。
【0022】
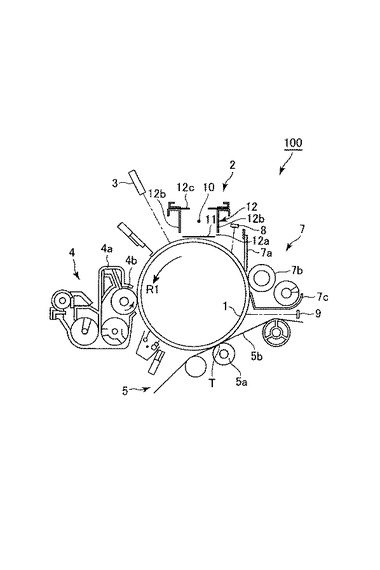
図1は、本実施例の画像形成装置100の概略構成を示す。画像形成装置100は、矢印R1方向(反時計回り)に回転駆動される、像担持体としてのドラム型の電子写真感光体(感光体)、即ち、感光ドラム1を有する。感光ドラム1の周囲には、次の各手段が配置されている。先ず、帯電手段としてのコロナ帯電器(以下、単に「帯電器」ともいう。)2である。次に、露光手段(情報書き込み手段)としての露光装置(レーザービームスキャナ)3である。次に、現像手段としての現像装置4である。次に、転写手段としての転写装置5である。次に、クリーニング手段としてのクリーニング装置7である。
【0023】
画像形成時には、回転する感光ドラム1の表面は、帯電器2によって一定の電位に帯電させられる。その後、帯電した感光ドラム1の表面は露光装置3によって画像情報に応じて露光される。これにより、感光ドラム1上に静電潜像(静電像)が形成される。感光ドラム1上に形成された静電潜像は、現像装置4によって現像剤のトナーが付着させられて、トナー像(現像剤像)として現像される。感光ドラム1上に形成されたトナー像は、転写装置5において、1次転写部材としての1次転写ローラ5aにより、被転写体としての中間転写ベルト5b上に1次転写される。
【0024】
その後、中間転写ベルト5b上のトナー像は、2次転写部材としての2次転写ローラ(図示せず)により、記録用紙などの転写材に2次転写される。その後、転写材は定着手段としての加熱及び加圧式の定着器(図示せず)により加熱及び加圧され、その上にトナー像が定着される。
【0025】
一方、中間転写ベルト5bに転写されずに感光ドラム1の表面に残留したトナー(転写残トナー)は、クリーニング装置7によって感光ドラム1の表面から除去されて、回収される。クリーニング装置7は、感光ドラム1に当接して配置されたクリーニングブレード7a及びファーブラシ7bによって感光ドラム1の表面からトナーを掻き落とし、回収容器7cに回収する。又、感光ドラム1の周囲には、感光ドラム1の表面に残存している電位を除電するための除電手段として、第1の前露光手段である帯電前露光器8と、第2の前露光手段であるクリーニング前露光器9とが設けられている。
【0026】
2.感光ドラム
画像形成装置100は、像担持体として回転可能なドラム型の電子写真感光体(感光体)、即ち、感光ドラム1を有する。感光ドラム1は、帯電器2による処理対象としての被帯電体である。この感光ドラム1は、負帯電特性のOPC(有機光半導体)で形成された感光層を有する。感光ドラム1は、直径が84mmであり、駆動源としての駆動モータ1a(図7)によって、中心支軸を中心に285mm/secのプロセススピード(周速度)で矢印R1方向に回転駆動される。
【0027】
3.帯電器
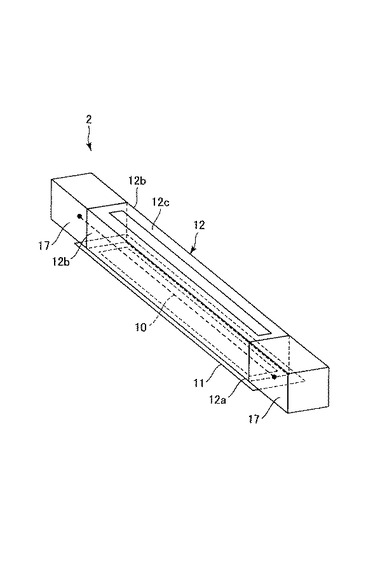
画像形成装置100は、帯電手段としてコロナ帯電器(帯電器)2を有する。図2は、帯電器2の外観を模式的に示す。図3は、帯電器2の一部の構成をより詳しく示す。
【0028】
帯電器2は、感光ドラム1の長手方向(回転軸線方向)に沿って感光ドラム1に対向配置され、放電により感光ドラム1の表面を帯電させる。帯電器2は、電気的なシールド作用(遮断作用)をなす支持筐体であるシールド(シールドケース)12を有する。シールド12は、電気的に接地されている。シールド12は、感光ドラム1の長手方向に沿って互いに略平行に対向して延在する2個の側板12b、12bと、両側板12b、12bの上端間を連結する天板12cと、を有する。これにより、シールド12は、感光ドラム1に対向する一面が開放され、帯電器2の長手方向(感光ドラム1の回転軸線方向と平行)に見た断面が略コの字形状とされている。即ち、シールド12の感光ドラム1に対向する側には、帯電器2の長手方向の長さ、帯電器2の短手方向(感光ドラム1の回転軸線方向と略直交する方向)の幅を有する矩形形状の開口部12aが形成されている。図3においては、シールド12の図中手前側(図1中左側)の側板12bは省いて示している。尚、所望により、天板12cは設けられていなくてもよい。
【0029】
帯電器2の長手方向におけるシールド12の両端部には、上記側板12b、12b、天板12cなどを保持する保持部材であるブロック17、17が結合され、シールド12と一体化されている。シールド12の側板12b、12b、天板12cはアルミニウムやステンレス鋼(SUS)などの金属(本実施例ではSUS)で形成され、ブロック17、17は樹脂などの電気絶縁性の材料(本実施例では樹脂)で形成されている。又、帯電器2は、シールド12の内部空間に軸線を有する放電電極である放電ワイヤ10を有する。放電ワイヤ10は、その軸線が帯電器2の長手方向(即ち、感光ドラム1の軸線方向)と略平行になるように、2個のブロック17間に張架されている。更に、帯電器2は、シールド12の感光ドラム1と対向する開口部12aに位置して、制御電極である板状のグリッド(グリッド電極)11を有する。
【0030】
放電ワイヤ10には第1の帯電電源18(図7)が接続されており、感光ドラム1の帯電処理を行う際には直流電圧が印加される。本実施例では、負極性の直流電圧が印加される。第1の帯電電源18が放電ワイヤ10に電圧を印加することにより、放電ワイヤ10でコロナ放電が発生する。又、グリッド11には第2の帯電電源19(図7)が接続されており、感光ドラム1の帯電処理を行う際には直流電圧が印加される。本実施例では、負極性の直流電圧が印加される。これは、放電ワイヤ10から感光ドラム1に向かうイオンの量を安定化させるためのものであり、その結果、感光ドラム1を所望の電位に帯電することが可能となる。
【0031】
更に説明すると、放電ワイヤ10には、外部電源である第1の帯電電源18が接続されている。この第1の帯電電源18から放電ワイヤ10に所定の極性(本実施例では負極性)・値の直流電圧を印加し、コロナ放電を発生させて、感光ドラム1の表面を帯電させる。放電ワイヤ10の材料としては、金属、例えば、ステンレススチール、ニッケル、モリブデン、タングステンなどを好適に用いることができる。本実施例では、放電ワイヤ10の材料として、金属の中で非常に安定性の高いタングステンを使用した。放電ワイヤ10の材料としてタングステンを使用することで、加熱、オゾン環境下という苛酷な条件下でも安定したコロナ放電を行うことができる。又、放電ワイヤ10の材料としてタングステンを使用することで、帯電器2を長期間にわたり安定して使用することが可能となる。放電ワイヤ10は、シールド12と一体化されたブロック17、17によって一定の張力で保持される。電気絶縁性の材料で形成されたブロック17、17によって、放電ワイヤ10とシールド12との間の電気的な絶縁が保たれている。放電ワイヤ10の直径は、40μm〜100μmであることが好ましい。放電ワイヤ10の直径が小さすぎると、放電によるイオンの衝突で切断されてしまうことがある。逆に、放電ワイヤ10の直径が大きすぎると、安定したコロナ放電を得るために必要な、放電ワイヤ10に印加する電圧が高くなってしまう。放電ワイヤ10に印加する電圧が高いと、オゾンが発生しやすくなり画像流れの発生確率が高くなり、又電源のコストが上昇しやすい。本実施例では、放電ワイヤ10の直径は60μmとした。
【0032】
又、板状のグリッド11には、外部電源である第2の帯電電源19として定電圧電源が接続されている。この第2の帯電電源19からグリッド11に印加するバイアスの制御により、整流効果を発揮させ、放電ワイヤ10におけるコロナ放電により発生し感光ドラム1に付与される電荷量を調整して、感光ドラム1の表面の帯電電位を制御する。本実施例では、グリッド11は、感光ドラム1に面する側と、放電ワイヤ10に面する側とを貫通する複数の孔が形成された多孔性(多孔質形状)の板状のグリッドである。即ち、本実施例では、板状のグリッド11は、メッシュ状に当該板状のグリッド11を貫通する複数の孔が形成されている。このような板状のグリッド11は、例えば、ステンレス鋼の薄板にエッチング処理により多数の開口部を形成することで作製することができる。より詳細には、本実施例では、グリッド11は、厚さ0.1mm〜0.5mm程度の平坦な板状のグリッド本体を貫通するように、メッシュ状の複数の貫通孔が形成されてなる。グリッド11は、シールド12の開口部12aに位置するようにしてシールド12に取り付けられ、感光ドラム1の外周面に近接して配置される。より詳細には、グリッド11は、複数の貫通孔が形成された領域がシールド12の開口部12aの内部に収まるように、ブロック17、17に固定される。尚、本実施例では、板状のグリッド11を用いたが、これに限定されるものではなく、例えばワイヤ形状のグリッドを用いてもよい。
【0033】
本実施例では、帯電器2は、放電ワイヤ10、グリッド11及びシールド12に付着した異物、即ち、トナー、外添剤又は紙粉などの飛散物、或いはコロナ放電により発生した放電生成物を清掃する放電ワイヤ清掃部材14、グリッド清掃部材15及びシールド清掃部材16を有する。尚、以下、放電ワイヤ清掃部材14、グリッド清掃部材15、シールド清掃部材16を総称する場合、単に「清掃部材」という。清掃部材については後述して詳しく説明する。
【0034】
4.露光装置
画像形成装置100は、帯電処理された感光ドラム1の表面に静電潜像を形成する露光手段(情報書き込み手段)として露光装置(レーザービームスキャナ)3を有する。本実施例では、露光装置3としては、半導体レーザーを用いたレーザービームスキャナを用いたが、これに限定されるものではなく、例えばLEDによる露光方式を採用してもよい。露光装置3は、感光ドラム1を画像情報に応じた光で走査露光する露光部と、制御装置のCPU(後述)からの情報に従って露光部による露光量を制御する露光量制御部とを有する。本実施例では、露光装置3の光量は、レーザー駆動パルスのパルス幅変調(PWM)によって制御される。当業者には周知のように、露光装置3の露光量制御部としてのパルス幅変調回路は、画像信号処理回路からの相対的に高濃度の画素画像信号に対して、相対的に幅の広いレーザー駆動パルスを生成する。又、パルス幅変調回路は、相対的に低濃度の画素画像信号に対して、相対的に幅の狭いレーザー駆動パルスを生成する。更に、パルス幅変調回路は、相対的に中濃度の画素画像信号に対して、中間の幅のレーザー駆動パルスを生成する。パルス幅変調回路から出力されたレーザー駆動パルスは、露光装置3の露光部に供給され、露光部はパルス幅に対応する時間だけ光源である半導体レーザーを発光させる。従って、半導体レーザーは、高濃度画素に対してはより長い時間にわたり駆動され、低濃度画素に対してはより短い時間にわたり駆動される。そのため、感光ドラム1は、高濃度画素に対しては主走査方向においてより長い範囲が露光され、低濃度画素に対しては主走査方向においてより短い範囲が露光される。つまり、画素の濃度に対応して静電潜像のドットサイズが異なることになる。
【0035】
5.現像装置
画像形成装置100は、現像手段として現像装置4を有する。現像装置4は、感光ドラム1上の静電潜像に現像剤のトナーを供給し、トナー像として可視化する。本実施例では、現像装置4として、2成分磁気ブラシ現像方式のものを用いた。又、本実施例では、現像装置4は、一様に帯電処理された感光ドラム1における、露光により電荷が減衰した露光部に、感光ドラム1の帯電極性(本実施例では負極性)と同極性に帯電したトナーを付着させる反転現像方式により、静電潜像を現像する。
【0036】
更に説明すると、現像装置4は、現像容器4aと、現像容器4aに回転可能に取り付けられた現像剤担持体としての現像スリーブ4bとを有する。現像容器4a内には、現像剤として主に非磁性トナー粒子(トナー)と磁性キャリア粒子(キャリア)とが混合された2成分現像剤が収容されている。トナーには、斯界にて一般に行われているように、トナーの流動性や帯電性の調整などのために、無機微粉体などとされる外添剤が添加されていてよい。本実施例では、キャリアの体積抵抗率は約5×108Ω・cm、平均粒径は35μmであった。トナーは、キャリアとの摺擦により負極性に摩擦帯電される。現像スリーブ4bは、感光ドラム1との最近接距離(S−Dギャップ)を約250μmに保持した状態で、感光ドラム1に対向して配置されている。感光ドラム1と現像スリーブ4bとの対向部が現像部となる。現像スリーブ4bは、現像部における感光ドラム1と現像スリーブ4bの表面の移動方向が互いに逆方向になるように回転駆動される。つまり、現像スリーブ4bは、感光ドラム1の矢印R1方向の回転に対して、順方向に回転駆動される。現像スリーブ4bの内側には、磁界発生手段としてのマグネットローラが設けられており、その磁力により、現像スリーブ4bの回転に伴って2成分現像剤が現像部に搬送される。現像部において、2成分現像剤は、現像スリーブ4bの表面から穂立ちした磁気ブラシの層を形成する。磁気ブラシの層は、現像剤コーティングブレード(図示せず)により所定の厚さの薄層として整えられる。又、現像スリーブ4bには、現像電源から所定の現像バイアスが印加される。本実施例では、現像スリーブ4bに印加される現像バイアスは、直流電流(Vdc)と交流電圧(Vac)とを重畳した振動電圧であり、直流電圧は−650V、交流電圧はVpp1800Vとした。この現像バイアスによって感光ドラム1と現像スリーブ4bとの間に形成される電界によって、感光ドラム1上の静電潜像に対応して、2成分現像剤中のトナーが感光ドラム1上に選択的に付着される。これにより、静電潜像がトナー像として現像される。本実施例では、感光ドラム1上に形成されたトナー像のトナーの帯電量は、約−30μC/gであった。現像部を通過した現像スリーブ4b上の2成分現像剤は、現像スリーブ4bの回転に伴い現像容器4a内の現像剤溜り部に戻される。
【0037】
6.転写装置
画像形成装置100は、中間転写ユニットとされる転写手段5を有する。転写装置5は、無端ベルト状の中間転写体である中間転写ベルト5bを有する。1次転写部材としての1次転写ローラ5aは、中間転写ベルト5bの内周面側に配置されており、中間転写ベルト5bを介して、感光ドラム1の表面に対し所定の押圧力で圧接されている。感光ドラム1と中間転写ベルト5bとのニップ部(接触領域)が、感光ドラム1から中間転写ベルト5bへのトナー像の転写が行われる転写部Tとなる。中間転写ベルト5bは、感光ドラム1と1次転写ローラ5aとの間に挟持されて搬送される。1次転写ローラ5aには、1次転写電源から、トナーの正規の帯電極性(本実施例では負極性)とは逆極性(本実施例では正極性)の直流電圧である1次転写バイアスが印加される。本実施例では、特に、+2.0kVの1次転写バイアスが印加される。これにより、感光ドラム1上のトナー像は、中間転写ベルト5bの表面に静電的に転写される。
【0038】
尚、本明細書では詳しい説明は省略するが、当業者には周知のように、中間転写ベルト5b上に転写されたトナー像は、次に2次転写部(図示せず)において、別途搬送されてきた転写材に転写される。
【0039】
7.クリーニング装置
画像形成装置100は、1次転写工程後の感光ドラム1の表面をクリーニングするクリーニング手段として、クリーニング装置7を有する。クリーニング装置7は、クリーニング部材としてのクリーニングブレード7a及びファーブラシ7bと、クリーニングブレード7a及びファーブラシ7bにより感光ドラム1から除去されたトナーを収容する回収トナー容器7cとを有する。本実施例では、クリーニングブレード7aは、弾性体材料であるウレタンゴムで形成された板状部材であり、感光ドラム1の長手方向に沿って延在し、感光ドラム1の表面に所定の押圧力で圧接されている。又、本実施例では、ファーブラシ7bは、感光ドラム1の長手方向に沿って延びる回転軸に複数本植設されたブラシ部を有し、該ブラシ部が感光ドラム1の表面に接触するようにして回転駆動される。1次転写工程後に感光ドラム1上に残留したトナーは、先ず、ファーブラシ7bにより感光ドラム1の表面から除去されて回収トナー容器7cに回収される。そして、ファーブラシ7bで回収されなかったトナーが、クリーニングブレード7aにより感光ドラム1の表面から除去されて、回収トナー容器7cに回収される。
【0040】
8.除電手段
画像形成装置100は、除電手段として、第1の前露光手段である帯電前露光器(前露光ランプ)8と、第2の前露光手段であるクリーニング前露光器(クリーニング前露光ランプ)9とを有する。これら2つの前露光手段により、1次転写工程後の感光ドラム1の表面の電位をリセットすることにより、ゴーストの発生を防止する。本実施例では、帯電前露光器8及びクリーニング前露光器9として、中心波長660nmのスタンレー社製のLEDチップ(発光部)をアレイ状に加工したものを使用した。帯電前露光器8及びクリーニング前露光器9は、感光ドラム1の表面電位の少なくとも一部を除電(リセット)する除電手段(表面電位リセット手段)を構成する。帯電前露光器8及びクリーニング前露光器9は、それぞれの駆動制御部としての帯電前露光器駆動回路、クリーニング前露光器駆動回路に接続されている。帯電前露光器駆動回路及びクリーニング前露光器駆動回路はそれぞれ、制御手段としての情報集積回路によって、光照射のON/OFFタイミング、出力値(光量)などの条件が制御される。
【0041】
9.定着器
画像形成装置100は、2次転写部(図示せず)にて転写材に転写されたトナー像を転写材に定着させる定着手段として加熱及び加圧式の定着器(図示せず)を有する。本実施例では、定着器は熱ローラ式のものであり、加熱ローラとこれに圧接する加圧ローラとで形成されるニップ部(接触領域)において転写材を加熱及び加圧しながら搬送することで、トナー像を転写材に定着させる。トナー像の定着処理を受けた転写材は、画像形成物(プリント、コピー)として画像形成装置100から出力される。
【0042】
10.放電ワイヤ清掃部材
図3に示すように、帯電器2は、放電ワイヤ10に付着した異物を清掃するための放電ワイヤ清掃部材14を有する。放電ワイヤ清掃部材14は、支持体13に保持されている。本実施例では、放電ワイヤ清掃部材14は、支持体13に保持された状態で互いに圧接すると共にその間に放電ワイヤ10を挟持する、2個の矩形形状のパッドで構成されている。放電ワイヤ清掃部材14は放電ワイヤ10に圧接した状態で移動して放電ワイヤ10を清掃する。本実施例では、放電ワイヤ清掃部材14と放電ワイヤ10とが接する部位は、放電ワイヤ10に押されて凹状になっている。但し、放電ワイヤ清掃部材14の形状はこれに限定されるものではない。例えば、放電ワイヤ清掃部材14は、放電ワイヤ10の外周形状と同様な円弧状の切込みを入れて、放電ワイヤ10からの摩擦抵抗を軽減させてもよい。但し、このような形状の場合、放電ワイヤ10の外周の半分以上が放電ワイヤ清掃部材14から摩擦抵抗を受けるような配置にすることが望まれる。本実施例では、放電ワイヤ清掃部材14の各パッドには、スポンジを基材として、放電ワイヤ10に接触するその表層にゴム層を設けて、その表層に研磨粒子であるアルミナを塗布し、樹脂結着させたものを用いた。
【0043】
放電ワイヤ清掃部材14は、支持体13が清掃部材移動機構(後述)によって帯電器2の長手方向に移動させられることによって、放電ワイヤ10を摺擦して、それに付着していた異物を拭き取る。本実施例では、放電ワイヤ清掃部材14の移動による放電ワイヤ10の清掃動作は、画像形成装置100の電源ON時又は一定枚数の画像形成を行う毎に行われる。
【0044】
11.グリッド清掃部材
図3に示すように、帯電器2は、グリッド11、より詳細には、その放電ワイヤ10に対向する側の側面に付着した異物を清掃するためのグリッド清掃部材15を有する。グリッド清掃部材15は、支持体13に保持されている。本実施例では、グリッド清掃部材15は、支持体13とグリッド11とで挟持されて圧縮された状態で支持体13に保持された、矩形形状のパッドで構成されている。グリッド清掃部材15はグリッド11に圧接した状態で移動してグリッド11を清掃する。本実施例では、帯電器2の短手方向の長さは、グリッド11の同方向の長さより長く設定されている。本実施例では、グリッド清掃部材15として、繊維を基布に織り込むことにより形成された、基材の表層にブラシを設けたブラシ状の清掃部材を用いた。より詳細には、本実施例では、グリッド清掃部材15には、アクリル系ブラシを基布に織り込んだ部材を使用した。但し、グリッド清掃部材15を構成する材料はこれに限定されるものではなく、ナイロン、PVC、PPSなどを使用してもよい。又、グリッド清掃部材15は、植毛系の部材に限らず、フェルト、スポンジのような弾性部材や、アルミナ、炭化珪素などの研磨剤を塗布したシートなどを利用してもよい。グリッド11への接触時の力学的な抵抗が、グリッド11の清掃に不都合を生じなければ、任意の清掃部材を用いることができる。
【0045】
グリッド清掃部材15は、支持体13が清掃部材移動機構(後述)によって帯電器2の長手方向に移動させられることによって、グリッド11の放電ワイヤ10に対向する面を摺擦して、それに付着していた異物を拭き取る。本実施例では、グリッド清掃部材15の移動によるグリッド11の清掃動作は、画像形成装置100の電源ON時又は一定枚数の画像形成を行う毎に行われる。
【0046】
12.シールド清掃部材
図3に示すように、帯電器2は、シールド12、より詳細には、その側板12b、12bの放電ワイヤ10に対向する内面に付着した異物を清掃するためのシールド清掃部材16を有する。シールド清掃部材16は、支持体13に保持されている。本実施例では、シールド清掃部材16は、支持体13とシールド12とで挟持されて圧縮された状態で支持体13に保持された、矩形形状のパッドで構成されている。シールド清掃部材16はシールド12に圧接した状態で移動してシールド12を清掃する。本実施例では、シールド清掃部材16として、繊維を基布に織り込むことにより形成された、基材の表層にブラシを設けたブラシ状の清掃部材を用いた。より詳細には、本実施例では、シールド清掃部材16には、アクリル系ブラシを基布に織り込んだ部材を使用した。但し、シールド清掃部材16を構成する材料はこれに限定されるものではなく、ナイロン、PVC、PPSなどを使用してもよい。又、シールド清掃部材16は、植毛系の部材に限らず、フェルト、スポンジのような弾性部材や、アルミナ、炭化珪素などの研磨剤を塗布したシートなどを利用してもよい。シールド12への接触時の力学的な抵抗が、シールド12の清掃に不都合を生じなければ、任意の清掃部材を用いることができる。尚、図3においては、シールド12の図中手前側(図1中左側)の側板12bを清掃するシールド清掃部材16は省いて示している。
【0047】
シールド清掃部材16は、支持体13が清掃部材移動機構(後述)によって帯電器2の長手方向に移動させられることによって、シールド12の側板12b、12bの放電ワイヤ10に対向する内面を摺擦して、それに付着していた異物を拭き取る。本実施例では、シールド清掃部材16の移動によるシールド12の清掃動作は、画像形成装置100の電源ON時又は一定枚数の画像形成を行う毎に行われる。
【0048】
本実施例では、放電ワイヤ清掃部材14、グリッド清掃部材15及びシールド清掃部材16を配設する。ことにより、帯電器2に付着する異物をより良好に清掃することができる。放電ワイヤ清掃部材14、グリッド清掃部材15及びシールド清掃部材16のうち少なくとも1つを有し、帯電器2に付着した異物を除去することで、帯電器2の長手方向における放電電流分布をより均一な状態に復帰させることができる。典型的には、グリッド清掃部材15又は放電ワイヤ清掃部材14を有する。
【0049】
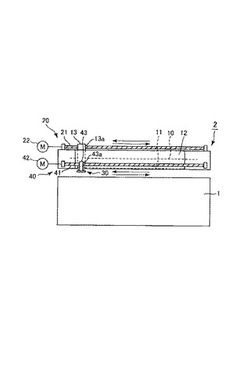
13.清掃部材移動機構
図6は、本実施例の画像形成装置100の帯電器2の周囲を側方から見た様子を示す。図6に示すように、本実施例では、帯電器2には、清掃部材を駆動する清掃部材駆動手段としての清掃部材移動機構20が設けられている。清掃部材移動機構20は、駆動軸としてのスクリュー軸21と、スクリュー軸21を回転駆動する駆動源としてのモータ22と、支持体13と、を有して構成される。スクリュー軸21は、その長手方向が帯電器2の長手方向と略平行となるように配置されており、らせん状の溝がその長手方向にわたって周面に形成されている。本実施例では、スクリュー軸21は、ブロック17、17に回転可能に支持されている。このらせん状の溝が、支持体13に設けられた駆動係合部13aに螺合している。従って、モータ22によりスクリュー軸21が正転することにより支持体13は一方向に移動し、又モータ22によりスクリュー軸21が逆転することにより支持体13は逆方向に移動する。このように、支持体13が往復移動することによって、支持体13に保持された放電ワイヤ清掃部材14、グリッド清掃部材15及びシールド清掃部材16による清掃動作を実行することができる。本実施例では、放電ワイヤ清掃部材14、グリッド清掃部材15及びシールド清掃部材16は、同じ支持体13に保持されており、同じ清掃部材移動機構20により、同期して駆動される。
【0050】
清掃動作時以外においては、放電ワイヤ清掃部材14、グリッド清掃部材15及びシールド清掃部材16は、それぞれ清掃対象である放電ワイヤ10、グリッド11及びシールド12に対して離間するように帯電器2の手前側(図1の紙面手前側)に待機している。又、本実施例では、清掃動作時には、放電ワイヤ清掃部材14、グリッド清掃部材15及びシールド清掃部材16は、それぞれ清掃対象である放電ワイヤ10、グリッド11及びシールド12に一定量侵入しながら、帯電器2の長手方向におけるそれぞれの略全域を清掃するように清掃部材移動機構20により往復移動させられる。
【0051】
尚、放電ワイヤ清掃部材14、グリッド清掃部材15又はシールド清掃部材16は、清掃動作時に、帯電器2の長手方向の任意の箇所にて清掃対象たる放電ワイヤ10に接触するように構成されていてもよい。例えば、放電ワイヤ清掃部材14では、上記任意の箇所にて放電ワイヤ10を挟持するようにする。
【0052】
又、本実施例では、往復移動における所要時間は合計30秒となっており、往路15秒、復路15秒に設定されている。往復移動終了時には、帯電器2の手前側に光学センサによる清掃部材ホームポジションセンサ(図示せず)が配設されている。これにより、万が一放電ワイヤ清掃部材14、グリッド清掃部材15及びシールド清掃部材16が帯電器2の長手方向の途中で止まった場合にはCPU(後述)が異常を判断できるようになっている。
【0053】
又、上述のように帯電器2の長手方向の任意の箇所にて放電ワイヤ清掃部材14、グリッド清掃部材15又はシールド清掃部材16を清掃対象に接触させる場合、清掃部材移動機構20の駆動開始からの時間をCPU(後述)が計測することにより上記任意の位置を把握し、その所定の時間を持って接触させる。
【0054】
本実施例では、ワイヤ清掃部材14、グリッド清掃部材15、シールド清掃部材16は同一の支持体13に保持され、同一の移動機構20にて移動させる。しかし、このような移動機構に限定されず、それぞれを別個の移動機構にて移動させる構成としてもよい。
【0055】
14.放電電流分布の検出
本実施例では、帯電器2のグリッド11と感光ドラム1との間に、帯電器2の長手方向における放電電流分布を検出するための放電電流検出手段としての放電電流センサ30を有する。
【0056】
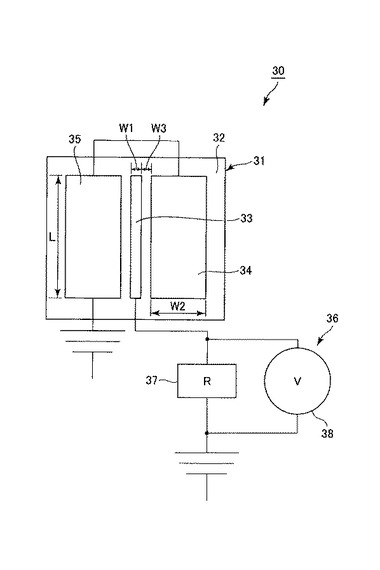
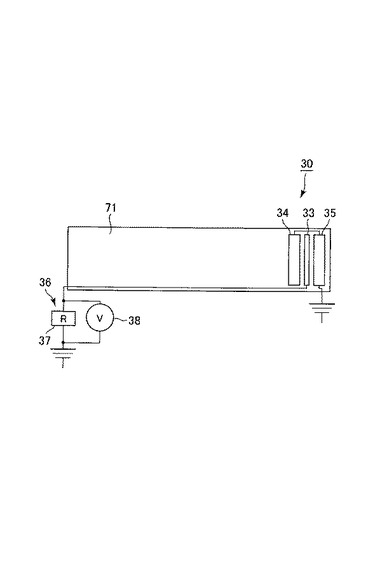
図4は、本実施例における放電電流センサ30の概略構成を示す。放電電流センサ30は、検出部材としての検出電極31と、検出電極31による検出出力を生成する回路部としての検出回路36を有する。放電電流センサ30は、少なくともその検出電極31が後述する検出電極移動機構40(図6)により帯電器2の長手方向に沿って一定速度にて移動し、帯電器2がコロナ放電を行っているときに、帯電器2の長手方向における放電電流分布を検出するように構成されている。
【0057】
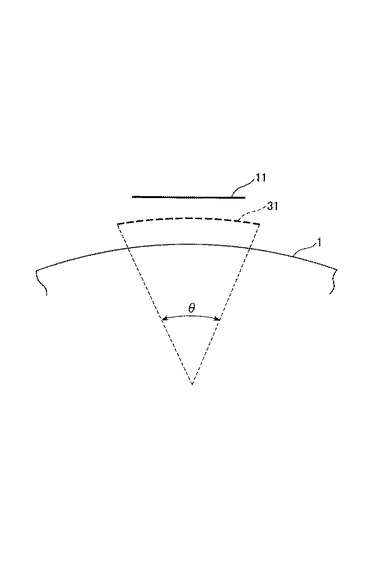
本実施例では、図5に示すように、検出電極31は、感光ドラム1の曲率と同じ曲率をもってグリッド11と感光ドラム1との間に配置される。そのため、検出電極31は、グリッド11と感光ドラム1との間における空間電流分布を感光ドラム1上に流入する電流分布とほぼ同じ状態で検出すること可能なように構成されている。
【0058】
本実施例では、図4に示すように、検出電極31は、電気的に接地されていない基部32の表面上に、電気的に接地された第1の電極部33、第2の電極部34及び第3の電極部35が設けられて構成されている。第2、第3の電極部34、35は、基部32上で所定の間隔をあけて第1の電極部33を挟むように配置されており、又これら第2、第3の電極34、35は互いに電気的に接続されている。そして、検出電極31は、第1、第2、第3の電極部33、34、35が設けられた側の基部32の表面をグリッド11に対向させて、第1電極部33を主検出領域とする。第1、第2、第3の電極33、34、35は、基部32の表面に接着されている。
【0059】
検出回路36において、第1の電極部33は電気抵抗37を介して電気的に接地され、第1の電極部33に流入した電流は電気抵抗37の両端間に電気的に接続された電圧測定回路38により電圧値に変換されて測定される。電圧測定回路38の測定結果とされる検出回路36の検出結果は、画像形成装置100の制御装置50(図7)に入力され、この制御装置50に設けられた記憶部52に記憶される。このように、本実施例では、帯電器2の長手方向における放電電流分布は、検出電圧分布に変換されて記録される。
【0060】
本実施例では、第1、第2、第3の電極部33、34、35は、いずれも平面視矩形形状を有し、それぞれの長手方向は略平行に配置されている。本実施例では、第1の電極部33の短手方向の幅W1と、第2、第3の電極部34、35のそれぞれの短手方向の幅W2とは、W1<W2の関係となっている。本実施例では、第2、第3の電極部34、35の幅は同じである。そして、第1の電極部33と、第2、第3の電極部34、35のそれぞれとの間には、所定の間隔W3が設けられている。本実施例では、第1、第2、第3の電極部33、34、35の短手方向が、検出電極31の移動方向とされる。このように、電気的に接地された第1の電極部33と第2、第3の電極部34、35のそれぞれとの間に、電気的に接地されていない基部(非接地部)32が露出した領域を挟むことにより、次のような効果が得られる。即ち、第1の極部33の直下以外の放電電流を第2、第3の電極部34、35に流れ込ませることにより検出誤差を防止し、且つ、基部32によって挟むことにより第1の電極部33の直下のみの領域の放電電流を検出することができる。このことから、グリッド11を通過した後の放電電流をより正確に検出することができる。
【0061】
本実施例では、第1の電極部33の短手方向の幅W1を1mm、第2、第3の電極部34、35の短手方向の幅W2を3cmとした。又、本実施例では、第1、第2、第3の電極部33、34、35の厚さは、いずれも10μmとした。又、本実施例では、第1の電極部33と第2、第3の電極部34、35のそれぞれとの間隔W3は、1mmとした。又、本実施例では、第1、第2、第3の電極部33、34、35の長手方向の長さLは同じであり、5cmとした。又、基部32は、これら第1、第2、第3の電極部33、34、35がその表面上に形成できる十分の大きさを有する。
【0062】
尚、本実施例では、基部32は絶縁部材で構成した。特に、本実施例では、基部32は、樹脂のモールド成形により形成された。本実施例では基部32を構成する樹脂として、PET(ポリエチレンテレフタレート)を用いた。又、本実施例では、第1、第2、第3の電極部33、34、35は、ステンレス鋼(SUS304)にて構成した。
【0063】
15.検出電極移動機構
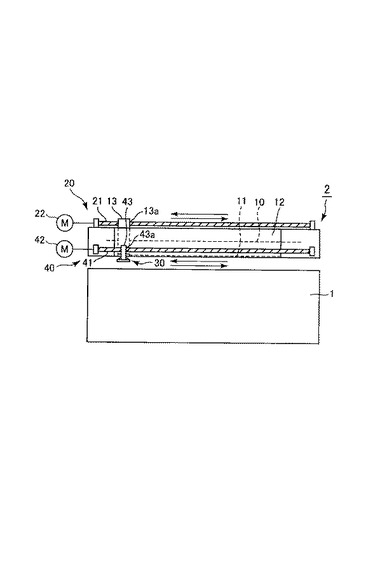
図6に示すように、本実施例では、帯電器2には、検出電極31を感光ドラム1の回転軸線方向に沿って移動させる移動手段としての検出電極移動機構40が設けられている。検出電極移動機構40は、駆動軸としてのスクリュー軸41と、スクリュー軸41を回転駆動する駆動源としてのモータ42と、検出電極支持部材43と、を有して構成される。検出電極30は、検出電極支持部材43に保持され、スクリュー軸41を介して帯電器2に移動可能に支持されている。スクリュー軸41は、その長手方向が帯電器2の長手方向と略平行となるように配置されており、らせん状の溝がその長手方向にわたって周面に形成されている。本実施例では、スクリュー軸41は、ブロック17、17に回転可能に支持されている。このらせん状の溝が、検出電極支持部材43に設けられた駆動係合部43aに螺合している。従って、モータ42によりスクリュー軸41が正転することにより検出電極支持部材43は一方向に移動し、又モータ42によりスクリュー軸41が逆転することにより検出電極支持部材43は逆方向に移動する。このように、検出電極支持部材43が往復移動することによって、電極支持部材43に保持された検出電極30による放電電流の検出動作を実行することができる。
【0064】
本実施例では、検出電極移動機構40は、検出電極30を、帯電器2の長手方向に沿って約56mm/secにて移動させる。検出電極31の移動速度は、帯電器2の長手方向における放電電流分布を検出できる範囲であれば、本実施例の移動速度に限定されるものではない。本実施例では、本実施例の構成において最も良好な感度が得られる検出電極31の移動速度を適用した。
【0065】
16.制御装置
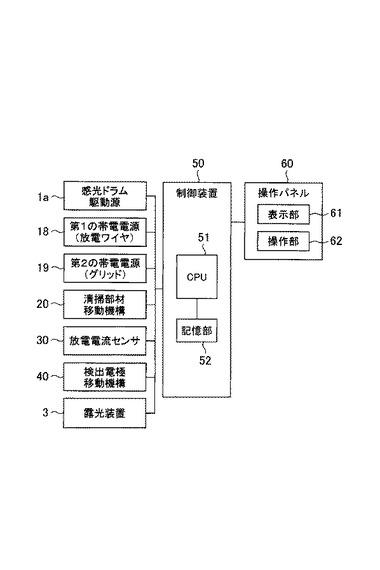
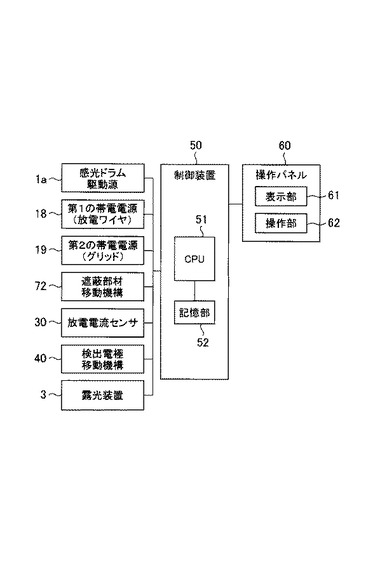
図7は、本実施例の画像形成装置100の制御系を示す。
【0066】
本実施例では、画像形成装置100の動作は、画像形成装置100に設けられた制御装置50が統括的に制御する。制御装置50は、制御手段としてのCPU51、記憶手段としての記憶部(ROM、RAMなど)52を有する。制御装置50は、記憶部52に格納されたプログラムやデータに従って、画像形成装置100の各部をシーケンス動作させることができる。本実施例との関連において、制御装置50は、感光ドラム1の駆動源(駆動モータ)1a、放電ワイヤ10に電圧を印加する第1の帯電電源18、グリッド11に電圧を印加する第2の帯電電源19、感光ドラム1を走査露光する露光装置3の動作を制御する。又、本実施例との関連において、制御装置50は、清掃部材移動機構20(より詳細にはそのモータ22)、検出電極移動手段40(より詳細にはそのモータ42)の動作を制御する。又、制御装置50は、放電電流センサ30による検出動作の開始、停止などの動作を制御すると共に、放電電流センサ30(より詳細にはその検出回路36)から検出信号が入力される。又、制御装置50には、画像形成装置100に設けられた操作パネル60が接続されている。本実施例では、操作パネル60には、表示手段としての液晶表示部などとされる表示部61と、操作手段としての操作キーなどとされる操作部62とが設けられている。そして、操作パネル60を介して、制御装置50からの情報に従った情報の表示、制御装置50への情報の入力ができるようになっている。
【0067】
本実施例では、詳しくは後述するように、制御装置50のCPU51が、帯電器2が放電を行っている間に検出電極移動機構40により検出電極31を移動させて放電電流センサ30によって帯電器2からの放電電流を検出し、感光ドラム1の回転軸線方向に沿う方向におけるグリッド11を通過した後の帯電器2からの放電電流分布を取得する取得手段の機能を有する。又、本実施例では、このCPU51が、取得手段により取得された2つの放電電流分布を比較する比較手段の機能を有する。更に、本実施例では、このCPU51が、比較手段による比較の結果、2つの放電電流分布の間で放電電流に所定量以上の差があると判断した領域については、対応する感光ドラム1の回転軸線方向の位置を露光する際の画像濃度信号に対する露光装置3の露光量を補正する補正手段の機能を有する。
【0068】
17.露光量制御
本実施例では、画像形成装置100は、感光ドラム1に対して放電を行う放電ワイヤ10、感光ドラム1との対向部に配置され感光体上の電位を制御するグリッド11を備えた帯電器2を有する。又、画像形成装置100は、帯電器2によって帯電させられた感光ドラム1を露光して静電潜像を形成する露光装置3を有する。又、画像形成装置100は、感光ドラム1とグリッド11との間に配置される検出電極31によりグリッド11を通過した後の帯電器2からの放電電流を検出する放電電流センサ30を有する。又、画像形成装置100は、検出電極31を帯電器2の長手方向に沿って移動させる検出電極移動機構40を有する。そして、本実施例では、放電電流センサ30を用いて帯電器2の長手方向における放電電流分布を検出する。これにより、感光ドラム1の長手方向において電位斑が発生する可能性を判断することができる。従って、本実施例では、上記放電電流分布を検出した結果に基づいて、感光ドラム1の長手方向において電位斑が発生する可能性がある状態であることが判断された場合に、画像形成時における露光装置3の露光量の補正を実行する。
【0069】
本実施例によれば、帯電器2の長手方向における放電電流分布が基準となる分布(初期値)に比べて、感光ドラム1の帯電斑が発生する可能性がある程度まで変化したか否かに応じて、画像形成時における露光量の補正を実行する。これにより、帯電器2の長手方向において、グリッド11、放電ワイヤ10又はシールド12が局所的に汚れた場合でも、この局所的な汚れの見落としを抑制し、感光ドラム1の長手方向の帯電斑が発生している場合でも、露光量の補正によって画像濃度斑の発生を抑制することができる。又、本実施例によれば、リアルタイムな帯電器2の長手方向における汚染部位の変化に対応することができる。尚、本実施例によれば、所望により清掃部材による帯電器2の清掃を行う頻度を低減することができる。その場合、清掃部材の摩耗を抑制することも可能となる。以下、更に詳しく説明する。
【0070】
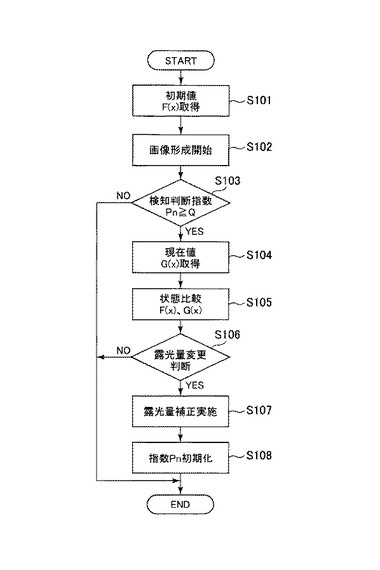
図8は、本実施例における露光量制御の流れを示す。
【0071】
CPU51は、画像形成装置100が設置された際或いは新品の帯電器2に交換された際に、初期状態の検出のために放電電流センサ30を動作させて、初期値F(x)を取得する(S101)。
【0072】
尚、初期値F(x)は、図10のグラフに示すように、検出範囲(横軸)と検出電圧(縦軸)との関係をプロットしたものである。CPU51は、放電電流センサ30によって検出されて制御装置50に入力された検出電圧に係る情報を記憶部52に記憶させ、初期値F(x)を完成させる。
【0073】
次に、画像形成が開始されると(S102)、CPU51は、検知判断指数Pnを算出し、所定の閾値Qと比較する(S103)。本実施例では、検知判断指数Pnを現在の累計画像形成枚数とした。CPU51は、検知判断指数Pnが閾値Q以上(Pn≧Q)となった場合に、放電電流センサ30を動作させて、現在の状態に対応した現在値G(x)を取得する(S104)。本実施例では、Q=2000枚に設定した。
【0074】
尚、現在値G(x)は、上記関係Pn≧Qが成立した時点での放電電流センサ30により検出された結果を集積したものであり、上記初期値F(x)と同様、図10に示すようなグラフで表現できる。CPU51は、放電電流センサ30によって検出されて制御装置50に入力された検出電圧に係る情報を記憶部52に記憶させ、現在値F(x)を完成させる。
【0075】
次に、CPU51は、記憶部52から初期値F(x)と現在値G(x)とを呼び出し、これらの比較を実行し、初期値F(x)と現在値G(x)との差分、即ち、帯電器2の初期の放電電流分布の状態と現在の放電電流の状態との間の変化の程度を示す情報を取得する(S105)。
【0076】
CPU51は、S105の結果に基づき、露光装置3の露光量の変更が必要であるか否かの判断(露光量変更判断)を実行する(S106)。
【0077】
そして、CPU51は、S106において変更が必要と判断した場合、露光量補正を実施する(S107)。この方法については後述して更に詳しく説明する。
【0078】
CPU51は、露光量補正を終了した後、検知判断指数Pnを初期化し(S108)、制御を終了する。
【0079】
尚、図8では、便宜上、上記の一連の判断、動作の終了後に制御を終了するものとしているが、画像形成動作が繰り返されている限り、S102以降の一連の判断、動作を繰り返し行うこととなる。
【0080】
又、図8では、便宜上、画像形成装置100が設置されるなどしてから、露光量補正の実施の要否を判断し、そして実施するまでの一連の流れについて示しているが、一旦初期値F(x)が取得されれば、例えばその後新品の帯電器2に交換されるまではS101は実行する必要はない。
【0081】
又、S107において、画像形成装置100に設けられた操作パネル60の表示部61にて、露光量補正動作中であることを示す情報を表示させてもよい。
【0082】
又、本実施例では、検知判断指数Pn、閾値Qを画像形成枚数を累積した累積画像形成枚数で設定した。しかし、これに限定されるものではなく、帯電器2の使用量に相関する値、例えば帯電器2による帯電時間を累積した累積帯電時間などで設定してもよい。即ち、典型的には、放電電流分布の測定は、所定の画像形成枚数毎又は帯電器2による感光ドラム1の所定の帯電時間毎に実行することができる。
【0083】
18.シーケンス
次に、上記露光量制御における画像形成装置100のシーケンス制御について説明する。
【0084】
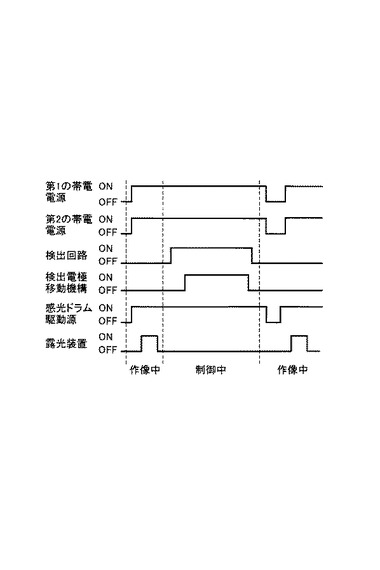
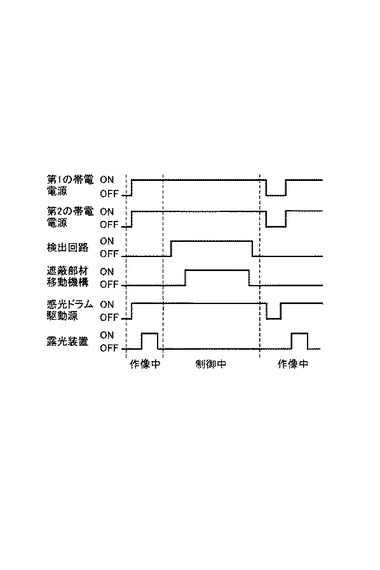
図9は、本実施例における露光量制御における画像形成装置100のシーケンス制御の一例のタイミングチャートを示す。
【0085】
図9は、横軸に時間軸、縦軸に制御時における各部の動作のON/OFF状態を示す。ONは動作状態(電圧印加状態、駆動状態)を示し、OFFは非動作状態(電圧非印加状態、非駆動状態)を示す。
【0086】
放電電流センサ30による検出動作が実行される際には、その実行前に感光ドラム1の回転駆動が開始されて、安定回転になる時間が確保される。
【0087】
次に、検出電極31が帯電領域(帯電器2の開口部12aと感光ドラム1との間)から退避している放電電流センサ30の検出回路36がONにされ、更に第1、第2の帯電電源18、19がONにされて帯電器2によるコロナ放電により感光ドラム1が帯電させられる。本実施例では、帯電器2の長手方向における放電電流分布(初期値F(x)及び現在値G(x))を測定する際の放電ワイヤ10、グリッド11に印加する電圧、感光ドラム1の回転速度などの帯電条件は、画像形成時と同じとした。
【0088】
帯電状態が安定した時点で、検出電極移動機構40による検出電極31の移動が開始され、検出電極31がグリッド11と感光ドラム1との間を帯電器2の長手方向に沿って移動しながら電界分布を検出する。尚、帯電器2の長手方向における放電電流分布は、検出電極31が移動する際の往路、復路のいずれにおける検出結果から求めてもよい。
【0089】
検出電極31による帯電器2の長手方向における検出範囲の全域の検出が終了し、前述のようにして露光量変更判断が実行され、露光量を変更する必要がある場合には、次の作像時において、変更した露光量で露光装置3が制御されて画像形成が実行される。
【0090】
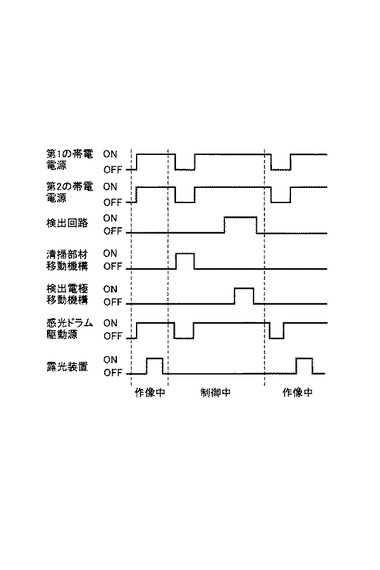
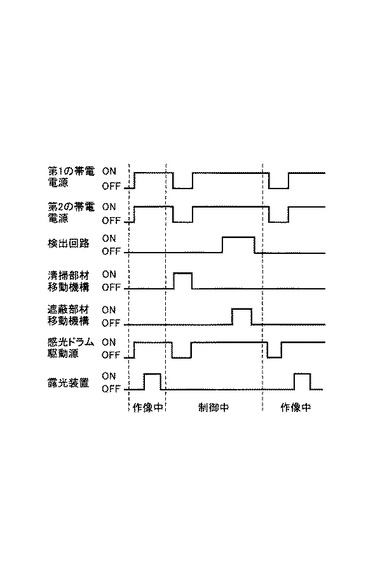
図10は、図9と同様に、本実施例における露光量制御における画像形成装置100のシーケンス制御の一例のタイミングチャートを示している。図10に示す例では、放電電流センサ30による検出動作を実行する前に、作像終了後、清掃部材による帯電器2の清掃が実行されている。
【0091】
清掃部材による帯電器2の清掃が終了した後、放電電流センサ30による検出動作が実行される前に、感光ドラム1の回転駆動が開始されて、安定回転になる時間が確保される。
【0092】
次に、検出電極31が帯電領域(帯電器2の開口部12aと感光ドラム1との間)から退避している放電電流センサ30の検出回路36がONにされ、更に第1、第2の帯電電源18、19がONにされて帯電器2によるコロナ放電により感光ドラム1が帯電させられる。
【0093】
帯電状態が安定した時点で、検出電極移動機構40による検出電極31の移動が開始され、検出電極31がグリッド11と感光ドラム1との間を帯電器2の長手方向に沿って移動しながら電界分布を検出する。
【0094】
検出電極31による帯電器2の長手方向における検出範囲の全域の検出が終了し、前述のようにして露光量変更判断が実行され、露光量を変更する必要がある場合には、次の作像時において、変更した露光量で露光装置3が制御されて画像形成が実行される。
【0095】
19.露光量変更判断
次に、本実施例における露光量変更判断の方法について説明する。
【0096】
本実施例では、取得手段としてのCPU51が帯電器2の長手方向における放電電流分布を取得し、比較手段としてのCPU51が取得された2つの放電電流分布を比較する。そして、補正手段としてのCPU51が、上記比較の結果、2つの放電電流分布の間で放電電流に所定量以上の差(絶対値)があると判断した領域については、対応する感光ドラム1の回転軸線方向の位置を露光する際の画像濃度信号に対する露光装置3の露光量を補正する。上記所定値は、感光ドラム1の長手方向の電位斑による画像不良が許容し得る程度を超える場合の閾値として予め求めておくことができる。より詳細には、本実施例では、補正手段としてのCPU51は、上記差があると判断した領域については、対応する感光ドラム1の回転軸線方向の位置を画像濃度信号に応じて露光装置3で露光した後の感光ドラム1の電位が、次のようになるような補正を行う。即ち、2つの放電電流分布のうち基準となる放電電流分布が取得された際の状態の帯電器2で帯電させた感光ドラム1を同画像濃度信号に応じて露光装置3で露光した後の感光ドラム1の電位に近づくように、画像濃度信号に対する露光装置3の露光量を補正する。以下、更に詳しく説明する。
【0097】
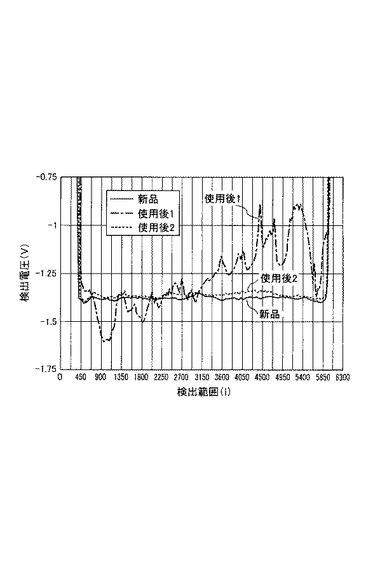
図11は、本実施例の画像形成装置100において、帯電器2として新品の帯電器2を使用した場合と、使用後の2種のグリッド11を装着した帯電器2を使用した場合とにおける、帯電器2の長手方向における放電量分布を検出した結果を示す。上記使用後の2種類のグリッドは、いずれも新品のグリッドを経時劣化させたものである。図11において「新品」と表したグラフが新品の帯電器2を使用した場合、「使用後1」、「使用後2」と表したグラフがそれぞれ使用後の異なるグリッドを装着した帯電器2を使用した場合の結果である。図11は、横軸に時間、縦軸に検出電圧を示している。尚、横軸の検出範囲iは、第1の電極部33が帯電器2の下を通過したときの、対応する感光ドラム1上の画像形成に必要な帯電領域における位置を表している(単位は任意)。この検出範囲iは、帯電器2の長手方向における放電電流分布の所望の検出精度との関係で許容し得る適宜の刻み幅で区切ることができる。又、この検出範囲iにおける各位置は、感光ドラム1の回転軸線方向における露光位置と関係づけられている。
【0098】
図11から、使用後1では、帯電器2の長手方向において非均一な放電電流分布となっていることが分かる。実際に使用後1の帯電器2を使用して画像形成を実行した場合、副走査方向のスジ(濃度斑)などの画像不良の発生が確認された。他方、使用後2では、新品と同様にほぼ均一な放電電流分布となっていることが分かる。従って、図11に示すようなグラフから、使用後2の帯電器2が新品の帯電器2と同様の帯電均一性を有することが判断できる。実際に使用後2の帯電器2を使用して画像形成を実行しても、画像不良の発生は確認されなかった。
【0099】
尚、ここでは、グリッド11が局所的に汚れた場合における、帯電器2の長手方向における放電電流分布が不均一となった場合についての結果を示した。同様に、放電ワイヤ10、シールド12がそれぞれ局所的に汚れた場合にも帯電器2の長手方向における放電電流分布が不均一となることがある。本発明者の検討によれば、局所的な汚れによって帯電器2の長手方向における放電電流分布の均一性に与える影響は、グリッド11、放電ワイヤ10、シールド12の順に小さくなる。従って、本実施例の制御の効果は、グリッド11、放電ワイヤ10、シールド12のうちグリッド11の汚れに対して最も効果が高く、次に放電ワイヤ10の汚れに対する効果が高く、シールド12の汚れに対する効果は最も小さい。
【0100】
本実施例では、図11に示すような帯電器2の長手方向における放電電流量分布の情報を取得し、その放電電流量分布から予測される感光ドラム1の長手方向の電位分布に応じて、感光ドラム1の長手方向(主走査方向)の所定範囲毎の領域に対する露光量を補正する。即ち、本実施例では、帯電器2の長手方向における放電電流分布を検出した結果に基づいて、露光装置3における感光ドラム1の長手方向における露光量分布を制御する。これにより、感光ドラム1の長手方向の電位斑を解消する。
【0101】
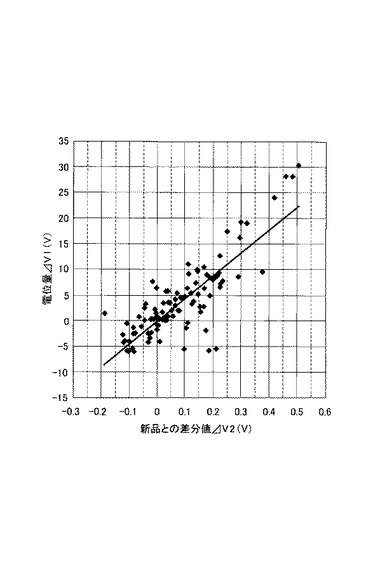
図12は、新品の帯電器2についての放電電流センサ30の検出電圧値との差分値ΔV1に対する感光ドラム1の電位変化量ΔV2の相関図である。
【0102】
本実施例は、上述のように制御装置50の記憶部52に新品の帯電器2についての放電電流センサ30の検出電圧値を示す初期値F(x)が記憶されている。従って、制御装置50のCPU51は、現在の帯電器2についての放電電流センサ30の検出電圧値を示す現在値G(x)を取得した際に、両者を比較することができる。これにより、新品時に対する検出電圧値の差分値ΔV1を求めて、図12に示すような関係から新品時に対する感光ドラム1の電位変化量ΔV2を求めることができる。このとき、検出電圧値の差分値ΔV1の絶対値が、上記所定量としての所定の閾値未満の場合には、露光量の補正を行わないこととすることができる。勿論、当該閾値を実質的にゼロとして、検出電圧値に少しでも差がある場合には露光量の補正を行うようにしてもよい。
【0103】
更に説明すると、本実施例では、制御装置50の記憶部52に、予め図12に示すような検出電圧値の差分値ΔV1と感光ドラム1の電位変化量ΔV2との関係を示す情報を格納しておく。このとき、検出電圧値の差分値ΔV1は、放電電流センサ30の検出範囲における一定の長さ毎の平均電圧値の差分(平均差分値)とする。又、感光ドラム1の電位変化量ΔV2は、帯電器2の長手方向において上記一定の長さ毎の検出範囲に対応する範囲の感光ドラム1の周方向における表面電位の平均値(平均変化量)とする。本実施例では、この一定の長さは感光ドラム1の電位検出時における視野角を考慮し、3cmとした。
【0104】
露光量変更判断を行うにあたり、制御装置50のCPU51は、初期値F(x)と現在値G(x)とから、上記一定の長さ毎の検出電圧値の差分値ΔV1(平均差分値)を求める。そして、CPU51は、上述のように予め記憶部52に格納されている検出電圧値の差分値ΔV1(平均差分値)に対する感光ドラム1の電位変化量ΔV2(平均変化量)から、現在の感光ドラム1の上記一定の長さ毎の電位変化量ΔV2(平均変化量)を求める。このようにして、CPU51は、放電電流センサ30の検出電圧値を感光ドラム1の電位変化量に変換することができる。
【0105】
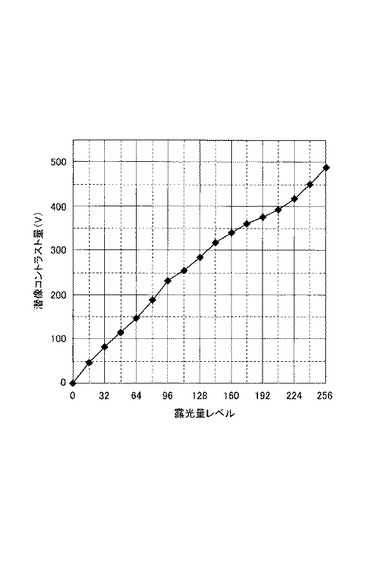
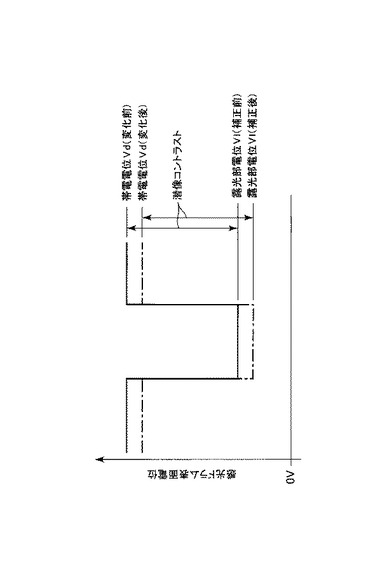
次に、CPU51は、電位変化量ΔV2が決定した時点で、画像形成時において使用する露光光量に対して補正を実行する。このときの補正量は、図13に基づき算出する。図13は、本実施例における潜像コントラスト量(V)(縦軸)と露光装置3の光量レベル(横軸)との関係を示す。ここで、潜像コントラスト量は、帯電器2で帯電された感光ドラム1の帯電電位Vdと、帯電器2で帯電された後に露光装置3で露光されることで電位が変化させられた部分(露光部)の電位Vlとの電位差(|Vd−Vl|)である。又、露光装置3の光量レベルは、パルス幅変調により制御され、入力レベルの最小値0から最大値255までの256レベルとされる。
【0106】
例えば、放電電流センサ30による検出結果から、帯電器2の長手方向の一部において検出電圧値の差分値ΔV1が0.2(V)であった場合について考える。この場合、図12に示す検出電圧値の差分値ΔV1と感光ドラム1の電位変化量ΔV2との関係より、帯電器2の新品時に比べて感光ドラム1の帯電電位(絶対値)は約10V低い状態であることが分かる。この帯電電位(絶対値)の低下分を補正するためには、露光装置3による露光量を上げて露光部電位(絶対値)を低下させる必要がある。図14は、感光ドラム1の帯電電位(絶対値)が低下した場合に、露光量を上げて潜像コントラスト量を維持する補正を模式的に示す。実線が補正前の電位関係、一点鎖線が補正後の電位関係を示す。
【0107】
次に、制御装置50のCPU51は、この約10V分の潜像コントラスト量を補正するために、図13を用いる。即ち、例えば現在の露光光量が192の場合、この現在の露光光量に対して約10Vの電位差を補正するために必要な補正量を、図13の関係から近似計算にて決定する。上記例の場合、光量レベルを10上げる制御を実行することとなる。このように、CPU51は、露光量変更判断において露光量を変更する必要があると判断した感光ドラム1の長手方向の一定の長さの領域毎に、当該領域内の露光部電位を得るための露光装置3の光量を補正する。
【0108】
そして、CPU51は、上述のようにして露光光量を決定した段階で、次の画像形成時において感光ドラム1の長手方向において露光量の必要な領域(即ち、帯電器2の局所的な汚染部に対応する領域)のみ露光量が補正された状態で画像形成を実行する。この状態は、次回検知判断指数Pnである累計画像形成枚数が所定の閾値になるまで継続され、その間副走査方向のスジ(濃度斑)などの画像不良が抑制された均一な画像を形成することが可能となる。
【0109】
以上、本実施例によれば、感光ドラム1の長手方向の帯電斑が発生している場合でも、露光量の補正によって画像濃度斑の発生を抑制することができる。又、本実施例によれば、リアルタイムな帯電器2の長手方向における汚染部位の変化に対応することができる。
【0110】
実施例2
次に、本発明の他の実施例について説明する。本実施例の画像形成装置の基本的な構成及び動作は実施例1のものと同じである。従って、実施例1のものと同一又はそれに相当する機能、構成を有する要素には同一符号を付して詳しい説明は省略する。
【0111】
本実施例では、帯電器2は、グリッド11と感光ドラム1との間に、遮蔽部材を有し、この遮蔽部材の一部に放電電流センサ30の検出電極31が設けられる。
【0112】
ここで、遮蔽部材は、遮蔽部材移動機構によって帯電器2の長手方向に沿って移動してグリッド11と感光ドラム1との間を遮蔽することにより、放電生成物を感光ドラム1に堆積させないようにするための部材である。本実施例では、この遮蔽部材に放電電流センサ30の検出電極31を設けることで、検出電極移動機構を上記遮蔽部材移動機構で兼ねようとするものである。以下、更に詳しく説明する。
【0113】
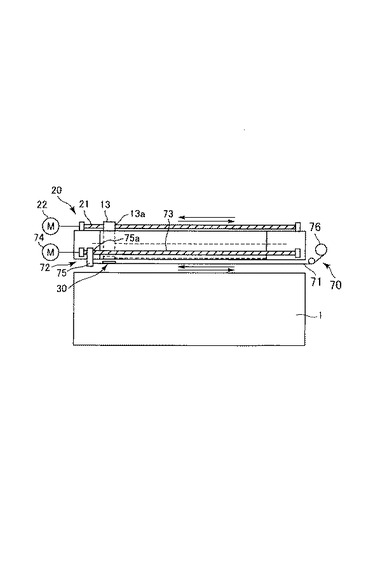
図15は、本実施例の画像形成装置100の帯電器2の周囲を側方から見た様子を示す。本実施例では、画像形成装置100は、所望のタイミングで帯電器2と感光ドラム1との間に配置される、可動式の遮蔽部材(シャッター)71と、この遮蔽部材71を移動させるための遮蔽部材移動手段としての遮蔽部材移動機構72と、を有する遮蔽装置70を有する。遮蔽装置70は、画像形成装置100の長期停止時などに帯電器2から感光ドラム1上へ放電生成物などの異物が落下するのを防止する。
【0114】
本実施例では、遮蔽部材71は、帯電器2の長手方向の一方の端部側から帯電器2と感光ドラム1との間に挿入される、ロール状に巻くことが可能なシート状の部材で構成される。遮蔽部材71は、帯電器2の長手方向の一方の端部側から帯電器2と感光ドラム1との間に挿入して遮蔽状態とする。遮蔽状態は、帯電器2の開口部12aの全体が遮蔽部材で遮蔽された状態であり、遮蔽部材71を移動させて帯電器2の開口部12aを閉じる動作は、この遮蔽状態になったとき完了する。画像形成動作中は、遮蔽部材71は、帯電器2の当該端部側にロール形状に巻き取ることで退避状態とする。退避状態は、帯電器2の開口部12aと感光ドラム1との間に遮蔽部材が無い状態であり、遮蔽部材71を移動させて帯電器2の開口部12aを開く動作は、この退避状態になったとき完了する。
【0115】
このように、遮蔽部材71は、退避状態と遮蔽状態とに移動可能なシート状部材である。退避状態では、遮蔽部材71は、感光ドラム1の長手方向の第1の端部側(帯電器2の手前側)に巻き取られて、感光ドラム1と帯電器2との間を開放する。又、遮蔽状態では、遮蔽部材71は、感光ドラム1の長手方向の第2の端部側へと引き出されて、感光ドラム1と帯電器2との間を遮蔽する。
【0116】
遮蔽部材71の一端は、遮蔽部材移動機構72の遮蔽部材支持部材75に接合されている。又、遮蔽部材71の他方の端部は、遮蔽部材71を巻き取る方向に付勢されている遮蔽部材巻き取り手段としての巻き取り芯76に接合されている。
【0117】
本実施例では、遮蔽部材移動機構72は、実施例1における検出電極移動機構40と概略同様の構成を有する。即ち、図15に示すように、遮蔽部材移動機構72は、駆動軸としてのスクリュー軸73と、スクリュー軸73を回転駆動する駆動源としてのモータ74と、遮蔽部材支持部材75と、を有して構成される。スクリュー軸73は、その長手方向が帯電器2の長手方向と略平行となるように配置されており、らせん状の溝がその長手方向にわたって周面に形成されている。本実施例では、スクリュー軸73は、ブロック17、17に回転可能に支持されている。このらせん状の溝が、遮蔽部材支持部材75に設けられた駆動係合部75aに螺合している。従って、モータ74によりスクリュー軸73が正転することにより遮蔽部材支持部材75は一方向に移動し、又モータ74によりスクリュー軸73が逆転することにより遮蔽部材支持部材75は逆方向に移動する。このように、遮蔽部材支持部材75が往復移動することによって、遮蔽部材71は、退避状態と遮蔽状態とに移動する。又、このように、遮蔽部材支持部材75が往復移動することによって、後述するように、遮蔽部材支持部材75側の端部の近傍の遮蔽部材71上に保持された、放電電流センサ30の検出電極31による放電電流の検出動作を実行することができる。
【0118】
尚、本実施例では、少なくとも帯電器2の長手方向における放電電流分布を検出する際には、遮蔽部材移動機構72は、遮蔽部材71(及び検出電極31)を、帯電器2の長手方向に沿って約56mm/secにて移動させる。検出電極31の移動速度は、帯電器2の長手方向における放電電流分布を検出できる範囲であれば、本実施例の移動速度に限定されるものではない。本実施例では、本実施例の構成において最も良好な感度が得られる検出電極31の移動速度を適用した。
【0119】
本実施例では、遮蔽部材支持部材75は、遮蔽部材71の一端部を感光ドラム1の曲率と同じ曲率を持って円弧状に保持する。そのため、当該一端部が当該円弧形状に変形された状態で引き延ばされることで、遮蔽部材71はその全体が当該円弧形状に変形される。これにより、実施例1と同様に、検出電極31は、感光ドラム1の曲率と同じ曲率をもってグリッド11と感光ドラム1との間に配置される。そのため、グリッド11と感光ドラム1との間における空間電流分布を感光ドラム1上に流入する電流分布とほぼ同じ状態で検出すること可能なように構成されている。
【0120】
尚、シート形状の遮蔽部材71をロール状に巻き取る構成とすることで、遮蔽部材71の退避時のスペースを小さくすることができる。
【0121】
本実施例では、遮蔽部材71は、ポリイミドで形成された絶縁性のシート部材である。本実施例では、遮蔽部材71の厚さは30μmである。尚、遮蔽部材71として、本実施例の樹脂シート以外に、例えば万が一感光ドラム1に接触した場合により感光ドラム1を損傷させ難い不織布などを用いても良い。
【0122】
そして、本実施例では、この遮蔽部材71のグリッド11側の面に、放電電流センサ30の検出電極31が設けられている。図16は、遮蔽部材71が帯電器2の開口部12aを覆っている状態を模式的に示す。本実施例の検出電極31は、実施例1における検出電極31の基部32の代わりに、遮蔽部材71の表面に第1、第2、第3の電極部33、34、35を設けたことを除いて、実質的に実施例1における検出電極31と同じである。即ち、本実施例では、電気的に接地された第1、第2、第3の電極部33、34、35を、電気的な非接地領域を形成する遮蔽部材71上に接着させたものであり、第1の電極部33が主検出領域となる。
【0123】
放電電流の検出時には、上述の遮蔽部材移動機構72により遮蔽部材71を帯電器2の長手方向に沿って移動させる。このとき、実施例1と同様に、検出回路36において、第1の電極部33は電気抵抗37を介して電気的に接地され、第1の電極部33に流入した電流は電気抵抗37の両端間に電気的に接続された電圧測定回路38により電圧値に変換されて測定される。電圧測定回路38の測定結果とされる検出回路36の検出結果は、画像形成装置100の制御装置50に入力され、この制御装置50に設けられた記憶部52に記憶される。このように、実施例1と同様、帯電器2の長手方向における放電電流分布は、検出電圧分布に変換されて記録される。
【0124】
図17は、本実施例の画像形成装置100の制御系を示す。
【0125】
本実施例の画像形成装置100の制御態様は、実施例1のものと同様である。本実施例では、制御装置50が検出電極移動機構40を制御する代わりに、遮蔽部材移動機構72を制御するようになっていることが異なる。
【0126】
又、本実施例における露光量制御は、図8を参照して説明した実施例1における制御と同様である。本実施例では、検出電極31が検出電極移動機構40によって移動させられる代わりに、検出電極31が遮蔽部材移動機構72によって移動させられることが異なる。
【0127】
図18、図19は、本実施例における露光量制御における画像形成装置100のシーケンス制御のタイミングチャートを示す。図18、図19に示す本実施例における露光量制御における画像形成装置100のシーケンス制御は、それぞれ図9、図10を参照して説明した実施例1のものと同様である。本実施例では、検出電極31が検出電極移動機構40によって移動させられる代わりに、検出電極31が遮蔽部材移動機構72によって移動させられることが異なる。
【0128】
このように、本実施例では、画像形成装置100は、感光ドラム1とグリッド11との間に配置されて感光ドラム1に対してグリッド11を遮蔽する遮蔽部材71と、遮蔽部材71を感光ドラム1の回転軸線方向に沿って移動させる遮蔽部材移動機構72と、を有する。そして、検出電極31は遮蔽部材上に設けられ、遮蔽部材移動機構72が検出電極31の移動手段を兼ねる。
【0129】
以上、本実施例によれば、実施例1と同様の効果を奏しうると共に、帯電器2の開口部12aを遮蔽する移動可能な遮蔽部材71が設けられる場合に、これに放電電流センサ30の検出電極31を設けることで、構成の簡易化を図ることができる。
【0130】
実施例3
次に、本発明の他の実施例について説明する。本実施例の画像形成装置の基本的な構成及び動作は実施例1のものと同じである。従って、実施例1のものと同一又はそれに相当する機能、構成を有する要素には同一符号を付して詳しい説明は省略する。
【0131】
本実施例は、放電電流センサ30による検出結果に係る情報を操作パネル60の表示部61に表示する。
【0132】
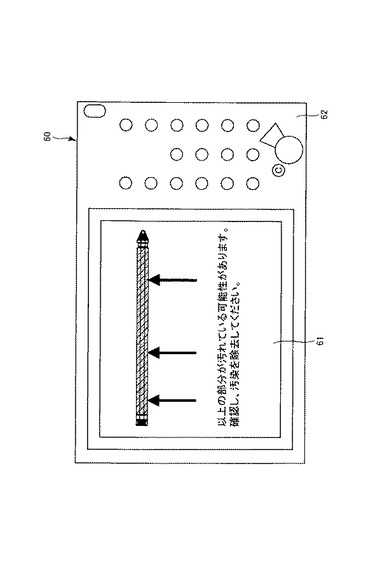
図20は、本実施例における操作パネル60の表示部61における情報表示の一例を示す模式図である。例えば、制御装置50のCPU51は、実施例1で説明した図11に示すような検出結果から、帯電器2の長手方向における検出範囲内において初期値F(x)と現在値G(x)とに所定値以上の差がある箇所を求めることができる。そして、CPU51は、図20に示すように当該箇所に対応するグリッド11の位置を操作パネル60の表示部61にて表示するなどして、帯電器2の長手方向における放電電流分布に影響する現在の帯電器2、特に、グリッド11の状態について表示することが可能である。
【0133】
又、操作パネル60の操作部62に、放電電流センサ30による帯電器2の長手方向における放電電流分布の検出動作を強制的(任意)に開始させる検出動作強制実行手段としての操作キーなどを設けてもよい。操作者が帯電器2の長手方向における放電電流分布に影響する現在の帯電器2の状態を知りたい場合、この操作キーによりCPU51に指示し、帯電器2の長手方向における放電電流分布の検出動作を実行させる。これにより、例えば図20に示すようにして現在の帯電器2の状態を操作パネル60の表示部61にて表示することが可能である。
【0134】
更に、操作パネル60の操作部62に、清掃部材による帯電器2の清掃を強制的(任意)に開始させる清掃動作強制実行手段としての操作キーなどを設けてもよい。これにより、例えば上述のように帯電器2の局所的な汚れを知った操作者が、清掃部材による帯電器2の清掃動作を強制的(任意)に実行させることができる。
【0135】
本実施例によれば、操作者に帯電器2の長手方向における放電電流分布に影響する現在の帯電器2の状態を知らせることができ、例えばグリッド11の交換時期が近いことなどを操作者に知らせることができる。その結果、サービスパーツなどを事前に補充或いは注文することが可能となり、画像形成装置100のダウンタイム(画像を出力できない期間)を低減することができる。又、清掃部材による帯電器2の清掃動作を操作者が任意に実行することを可能とすることができる。
【0136】
実施例4
次に、本発明の他の実施例について説明する。本実施例では、画像形成装置の基本的な構成及び動作自体は、上記いずれかの実施例のものと同じであってよい。
【0137】
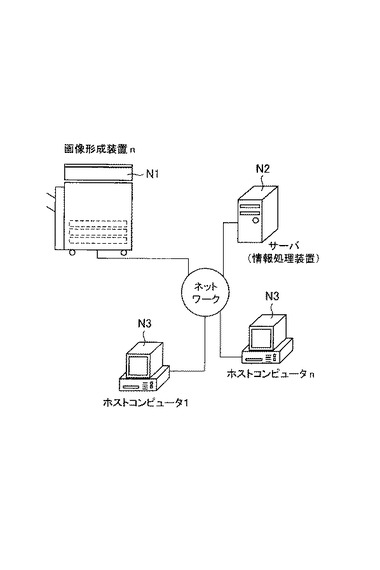
本実施例では、画像形成装置が情報処理装置を介してホストコンピュータと双方向通信可能に通信媒体により接続されている状況下で、放電電流センサ30による検出結果を情報処理装置或いはホストコンピュータに転送して該検出結果を共有する。
【0138】
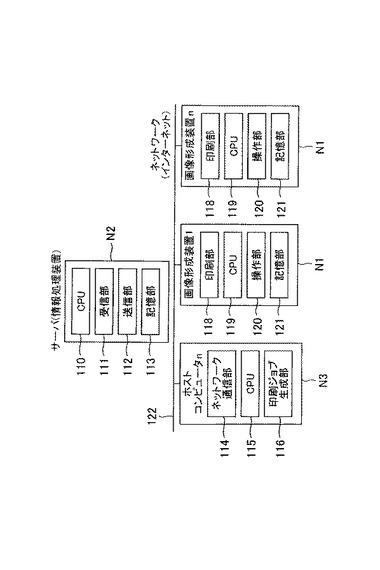
図21に示すように、本実施例では、画像形成装置とその他の情報機器とが、ネットワークを中心に各々の機器の間で相互通信可能とされている。図22は、図21のそれぞれの機器の概略構成を示すブロック図である。図23及び図24は、図21のそれぞれ機器のサーバホストコンピュータに対する分配情報図である。
【0139】
図22に示すように、サーバ(情報処理装置)N2は、主な構成要素として、CPU110、受信部111、送信部112、記憶部113を備えている。CPU110は、受信されたデータを円滑に分配処理し、データに応じた処理を実行する。例えば、データ受信時における時刻管理や、詳細設定の確認、データ送信相手先の指定や、背反する事項が成立した場合のエラー処理等を実行する。受信部111は、サーバ(情報処理装置)N2内に格納されているモデム等を利用し、ネットワーク122を介して送信されてきた情報を受け取る場所である。送信部112はサーバ(情報処理装置)N2内に格納されているモデムを利用し、ネットワーク122を介して送信されてきた情報を指定されたホストコンピュータN3に送信するための場所である。又、送信されてきた情報に誤りがある場合、相手先に再送信するための場所でもある。記憶部113は、ハードディスク等の不揮発性メモリであり、各ホストコンピュータN3からの画像データを受信した際に格納する。又、画像形成装置N1内におけるデータ情報、例えばコピー枚数、ジョブ情報、現在の状態、本実施例では放電電流センサ30による検知結果等を受信した際に格納する。
【0140】
又、図22に示すように、ホストコンピュータN3は、ネットワーク通信部114、CPU115、印刷ジョブ生成部116を備えている。ネットワーク通信部114は、ホストコンピュータ3内のモデムを介して画像形成装置N1とサーバ(情報処理装置)N2との双方向通信を行うためのものである。CPU115は、プログラムによって様々な数値計算や情報処理、機器制御等を行う。通常は組込みソフトウェアを動作させるための演算器、周辺回路、命令や情報を格納するメモリから構成されるハードウェアであるプロセッサにより実現する。印刷ジョブ生成部116は、ホストコンピュータ3内におけるハードディスク等の不揮発性メモリ内に格納されている。
【0141】
又、図22に示すように、画像形成装置N1は、主な構成要素として、印刷部118、CPU119、操作部120、記憶部121を備えている。印刷部118は画像形成装置N1における基本構成から成る部分であり、得られた画像データに基づいて転写材に画像を印刷する。例えば、画像形成装置N1は複写機である。CPU119は、必要なプログラムを読み出して、コピー動作等のタイミングを取りながら統一的に制御して、円滑なコピー動作を実行させる。又、サーバとの通信処理に関するプログラム等を格納している。操作部120はユーザーからのコピー枚数等の入力を受けるテンキー、コピー開始の指示を受け付けるコピースタートキー及び低電力解除の指示を受け付ける解除キー等を備えている。これらが押下されるとその旨をCPU119に知らせ、適切な処理動作を実行する。本実施例では、放電電流センサ30による検出結果を表示する際にも使用される。記憶部121は、ハードディスク等の不揮発性メモリであり、各ホストコンピュータ、或いは複写機本体の原稿読取装置などからの画像データ、又本実施例では放電電流センサ30による検出結果を格納する。
【0142】
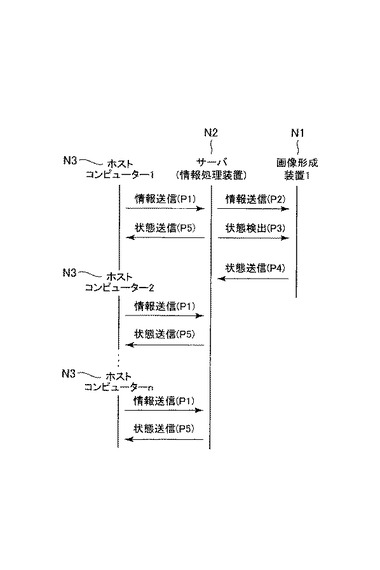
図23は、サーバ(N2)を介してホストコンピュータ(N3)に対して情報を送信する際の分配情報図である。例えば、ホストコンピュータ1(N3)のCPU(115)が現在の情報を収集するために、サーバ(N2)のCPU(110)に対して情報依頼を送信する(P1)。依頼を受信したサーバ(N2)のCPU(110)は、指定の画像形成装置1(N1)のCPU(119)に対して情報を送信(P2)すると共に、画像形成装置1(N1)の状態を検出する(P3)。画像形成装置1(N1)のCPU(119)は、現在の状態、本実施例では放電電流センサ30による検出結果をサーバ(N2)に対して送信(P4)する。サーバ(N2)のCPU(110)は、受信された結果に対して処理を行い、要求された結果をホストコンピュータ1(N3)のCPU(115)に送信する(P5)。その結果、ホストコンピュータ(N3)のCPU(115)は、要求された情報を逐次収集可能となる。
【0143】
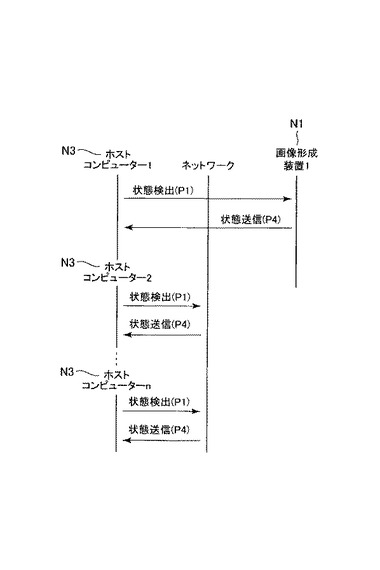
図24は、図23に対してサーバ(N2)のCPU(110)を介さずに現在の情報を受信する際の分配情報図である。例えば、ホストコンピュータ1(N3)のCPU(115)が現在の情報を収集するために、指定の画像形成装置1(N1)のCPU(119)の状態を検出する(P1)命令を送信する。画像形成装置1(N1)は現在の状態、本実施例では放電電流センサ30による検出結果を指定のホストコンピュータ1(N3)のCPU(115)に対して送信(P4)する。
【0144】
例えば、図23において、ホストコンピュータ1(N3)のCPU(115)が現在の帯電器2の状態を知りたい場合にサーバ(N2)のCPU(110)に情報依頼ジョブを送信する(P1)。受信したサーバ(N2)のCPU(110)は指定の画像形成装置1(N1)に対して放電電流センサ30による帯電器2の長手方向における放電電流分布の検知動作を実行するための命令ジョブを送信する。受信した画像形成装置1(N1)は、放電電流センサ30による帯電器2の長手方向における放電電流分布の検知動作を実行し、検知終了後、結果をサーバ(N2)に転送する。受信したサーバ(N2)のCPU110は、要求元のホストコンピュータ1(N3)に対して結果を送信することにより、操作者は検知結果を知ることができる。
【0145】
図24に示すように、サーバN3を介さずに直接指定の画像形成装置N1に対して情報依頼を実行してもよい。
【0146】
本実施例によれば、ネットワークを介した遠隔のメンテナンスサービスが可能となり、サービスパーツなどを事前に補充するなど、より無駄のないメンテナンスが可能となる。
【符号の説明】
【0147】
1 感光ドラム
2 帯電器(コロナ帯電器)
3 露光装置
10 放電ワイヤ
11 グリッド
12 シールド
15 グリッド清掃部材
20 清掃部材移動機構
30 放電電流センサ
31 検出電極
40 検出電極移動機構
50 制御装置
51 CPU
52 記憶部
71 遮蔽部材
72 遮蔽部材移動機構
【技術分野】
【0001】
本発明は、複写機、プリンター、ファクシミリ等の電子写真方式の画像形成装置に関するものである。
【背景技術】
【0002】
電子写真方式を用いた画像形成装置では、電子写真感光体(感光体)の表面を帯電させた後に、画像情報に応じて露光することにより、感光体の表面に静電潜像を形成する。感光体の表面を帯電させる方法としてコロナ帯電器を用いる方法が広く用いられている。
【0003】
コロナ帯電器は、一面が開放された支持筐体であるシールド(シールドケース)の両端部に配設された保持部材であるブロック間に、放電電極である放電ワイヤが展張された構成を有する。シールドは、代表的にはステンレス鋼(以下「SUS」ともいう。)で構成される。又、放電ワイヤは、タングステンなどの線材で構成される。コロナ帯電器を用いて被帯電体の被帯電面としての感光体の表面を帯電させる場合、シールドの開口部を感光体の表面に近接させた状態で対向させ、放電ワイヤに放電電流を供給してコロナ放電を発生させ、感光体の表面に電荷を付与する。
【0004】
感光体の表面の帯電電位は、放電ワイヤと感光体の表面との間にグリッド(グリッド電極)を設け、そのグリッドに印加するグリッドバイアスによって感光体の表面に付与する電荷量を調整することで制御される。グリッドとしては、主に、放電ワイヤと同種の材料又はSUSなどにより形成されたワイヤ形状のグリッドや、エッチングなどにより多数の孔が形成された多孔性(メッシュ状)の板状のグリッドが知られている。
【0005】
このようなコロナ帯電器を用いる場合、グリッドにトナー、トナーの外添剤、紙粉、エアロゾルなどの汚染物(異物)が付着する。このように、グリッドと異なる電気抵抗の物質(異物)が付着することによって、グリッドに電気抵抗斑が生じることがある。又、上述のような異物がグリッドのメッシュ状の開口を塞ぐことがある。そして、これらがコロナ帯電器における電界分布に影響を与え、感光体の長手方向の電位分布において帯電斑が発生することがある。
【0006】
上述のような異物の離形性は、コロナ放電によって発生する放電生成物によりグリッドの表面に放電生成物が生成することで悪化する。
【0007】
尚、上述のような異物は、放電ワイヤやシールドにも付着することがあり、それによってもコロナ帯電器における電界分布に影響を与え、感光体の長手方向の電位分布において帯電斑が発生することがある。感光体の長手方向の電位分布に最も影響するのはグリッドへの異物の付着であり、その次が放電ワイヤへの異物の付着であり、場合によってはシールドへの異物の付着も影響することがある。
【0008】
従来、このような課題に対して、コロナ帯電器内に清掃部材を配設し、この清掃部材を駆動手段などによって一定のタイミングにて駆動して、グリッドなどを清掃することが提案されている。
【0009】
例えば、特許文献1では、放電ワイヤに印加される電圧が閾値以上となった場合及びグリッドにリークする電流が所定値以下となった場合に放電ワイヤの清掃を行うことが提案されている。又、特許文献2では、複数の放電ワイヤを選択的に交換して使用できるように設け、放電ワイヤの放電の累積量(放電ワイヤの動作時間の積算値)が所定の上限に達した場合に使用する放電ワイヤを交換することが提案されている。又、特許文献3では、画像形成された用紙の累積枚数又は像担持体の回転処理累積時間が所定値以上になった場合に、放電ワイヤの清掃を促す表示を行うことが提案されている。
【0010】
尚、特許文献4は、副走査方向に対して濃度が変動している部分に対して露光量を補正することが記載されている。
【先行技術文献】
【特許文献】
【0011】
【特許文献1】特開2006−330648号公報
【特許文献2】特開2009−251382号公報
【特許文献3】特開2007−127901号公報
【特許文献4】特開2000−71515号公報
【発明の概要】
【発明が解決しようとする課題】
【0012】
上述のように、従来は、放電ワイヤの長手方向の全体を一つの検知対象としたり、単にコロナ帯電器の使用量と相関する値と閾値との比較結果に基づいて放電ワイヤを交換したり清掃したりしていた。
【0013】
しかしながら、上述のような異物によってグリッドなどがその長手方向において局所的に汚染されただけでも、コロナ帯電器における均一な電界形成に影響を与え、感光体の長手方向の電位分布を局所的に不均一にしてしまうこととなる。その結果、副走査方向のスジ(濃度斑)などとして画像不良が現れ、視感度的にも顕著に見えてしまうことがある。
【0014】
ところが、従来、コロナ帯電器の長手方向における放電電流分布を検出するものはなかったため、コロナ帯電器の長手方向において局所的に放電電流分布が不均一になっていることを見落としてしまう。そのため、感光体の長手方向の帯電斑を発生させ、副走査方向のスジ(濃度斑)などの画像不良を発生させてしまうことがある。又、単に定期的にコロナ帯電器を清掃するだけでは、リアルタイムなコロナ帯電器の長手方向における汚染部位の変化に対する追従性に劣る。そのため、その間にコロナ帯電器の長手方向において局所的に放電電流分布が不均一になった場合に、上述のような画像不良を発生させてしまうことがある。
【0015】
尚、上記特許文献4は、コロナ帯電器の長手方向における放電電流分布が局所的に不均一になることによる感光体の長手方向の電位斑については何ら記載していない。
【0016】
従って、本発明の目的は、感光体の長手方向の帯電斑が発生した場合でも、画像の濃度斑の発生を抑制することのできる画像形成装置を提供することである。
【課題を解決するための手段】
【0017】
上記目的は本発明に係る画像形成装置にて達成される。要約すれば、本発明は、回転可能な感光体と、前記感光体に対して放電を行う放電電極及び前記感光体との対向部に配置され前記感光体上の電位を制御する制御電極を備え前記感光体を帯電させる帯電器と、前記帯電器によって帯電させられた前記感光体を露光して静電潜像を形成する露光手段と、を有する画像形成装置において、前記感光体と前記帯電器との間に配置される検出部材により前記制御電極を通過した後の前記帯電器からの放電電流を検出する放電電流検出手段と、前記検出部材を前記感光体の回転軸線方向に沿って移動させる移動手段と、前記帯電器が放電を行っている間に前記移動手段により前記検出部材を移動させて前記放電電流検出手段によって前記帯電器からの放電電流を検出し、前記感光体の回転軸線方向に沿う方向における前記制御電極を通過した後の前記帯電器からの放電電流分布を取得する取得手段と、前記取得手段により取得された2つの前記放電電流分布を比較する比較手段と、前記比較手段による比較の結果、2つの前記放電電流分布の間で前記放電電流に所定量以上の差があると判断した領域については、対応する前記感光体の回転軸線方向の位置を露光する際の画像濃度信号に対する前記露光装置の露光量を補正する補正手段と、を有することを特徴とする画像形成装置である。
【発明の効果】
【0018】
本発明によれば、感光体の長手方向の帯電斑が発生した場合でも、画像の濃度斑の発生を抑制することができる。
【図面の簡単な説明】
【0019】
【図1】本発明の一実施例に係る画像形成装置の要部の断面図である。
【図2】本発明の一実施例に係る画像形成装置が備える帯電器の模式的な外観図である。
【図3】本発明の一実施例に係る画像形成装置が備える帯電器のシールドの内側をより詳しく示す斜視図である。
【図4】本発明の一実施例に係る画像形成装置が備える放電電流センサの概略構成図である。
【図5】本発明の一実施例に係る画像形成装置が備える放電電流センサの検出電極と感光ドラムとの位置関係を説明するための模式図である。
【図6】本発明の一実施例に係る画像形成装置が備える帯電器の模式的な側面図である。
【図7】本発明の一実施例に係る画像形成装置の制御態様を説明するためのブロック図である。
【図8】本発明の一実施例に係る画像形成装置における露光量制御の流れを説明するためのフローチャート図である。
【図9】本発明の一実施例に係る画像形成装置の露光量制御における各部の動作の一例を説明するためのシーケンスチャート図である。
【図10】本発明の一実施例に係る画像形成装置の露光量制御における各部の動作の他の例を説明するためのシーケンスチャート図である。
【図11】本発明の一実施例に係る画像形成装置の帯電器の長手方向における放電電流分布の検出結果を示すグラフ図である。
【図12】検出電圧の差分値と感光ドラムの電位変化量との関係を示すグラフ図である。
【図13】露光量レベルと潜像コントラスト量との関係を示すグラフ図である。
【図14】露光量補正の一例を説明するための模式図である。
【図15】本発明の他の実施例に係る画像形成装置が備える帯電器の模式的な側面図である。
【図16】本発明の他の実施例に係る画像形成装置が備える放電電流センサの概略構成図である。
【図17】本発明の他の実施例に係る画像形成装置の制御態様を説明するためのブロック図である。
【図18】本発明の他の実施例に係る画像形成装置の露光量制御における各部の動作の一例を説明するためのシーケンスチャート図である。
【図19】本発明の他の実施例に係る画像形成装置の露光量制御における各部の動作の他の例を説明するためのシーケンスチャート図である。
【図20】本発明の更に他の実施例に係る画像形成装置の操作パネルの表示部における表示を説明するための模式図である。。
【図21】本発明の更に他の実施例における画像形成装置とその他の情報機器との関連を示す模式図である。
【図22】本発明の更に他の実施例における画像形成装置とその他の情報機器の制御態様を示すブロック図である。
【図23】本発明の更に他の実施例における情報処理装置に対する分配情報図である。
【図24】本発明の更に他の実施例におけるホストコンピュータに対する分配情報図である。
【発明を実施するための形態】
【0020】
以下、本発明に係る画像形成装置を図面に則して更に詳しく説明する。
【0021】
実施例1
1.画像形成装置
先ず、本発明の一実施例に係る画像形成装置の全体構成及び動作について説明する。
【0022】
図1は、本実施例の画像形成装置100の概略構成を示す。画像形成装置100は、矢印R1方向(反時計回り)に回転駆動される、像担持体としてのドラム型の電子写真感光体(感光体)、即ち、感光ドラム1を有する。感光ドラム1の周囲には、次の各手段が配置されている。先ず、帯電手段としてのコロナ帯電器(以下、単に「帯電器」ともいう。)2である。次に、露光手段(情報書き込み手段)としての露光装置(レーザービームスキャナ)3である。次に、現像手段としての現像装置4である。次に、転写手段としての転写装置5である。次に、クリーニング手段としてのクリーニング装置7である。
【0023】
画像形成時には、回転する感光ドラム1の表面は、帯電器2によって一定の電位に帯電させられる。その後、帯電した感光ドラム1の表面は露光装置3によって画像情報に応じて露光される。これにより、感光ドラム1上に静電潜像(静電像)が形成される。感光ドラム1上に形成された静電潜像は、現像装置4によって現像剤のトナーが付着させられて、トナー像(現像剤像)として現像される。感光ドラム1上に形成されたトナー像は、転写装置5において、1次転写部材としての1次転写ローラ5aにより、被転写体としての中間転写ベルト5b上に1次転写される。
【0024】
その後、中間転写ベルト5b上のトナー像は、2次転写部材としての2次転写ローラ(図示せず)により、記録用紙などの転写材に2次転写される。その後、転写材は定着手段としての加熱及び加圧式の定着器(図示せず)により加熱及び加圧され、その上にトナー像が定着される。
【0025】
一方、中間転写ベルト5bに転写されずに感光ドラム1の表面に残留したトナー(転写残トナー)は、クリーニング装置7によって感光ドラム1の表面から除去されて、回収される。クリーニング装置7は、感光ドラム1に当接して配置されたクリーニングブレード7a及びファーブラシ7bによって感光ドラム1の表面からトナーを掻き落とし、回収容器7cに回収する。又、感光ドラム1の周囲には、感光ドラム1の表面に残存している電位を除電するための除電手段として、第1の前露光手段である帯電前露光器8と、第2の前露光手段であるクリーニング前露光器9とが設けられている。
【0026】
2.感光ドラム
画像形成装置100は、像担持体として回転可能なドラム型の電子写真感光体(感光体)、即ち、感光ドラム1を有する。感光ドラム1は、帯電器2による処理対象としての被帯電体である。この感光ドラム1は、負帯電特性のOPC(有機光半導体)で形成された感光層を有する。感光ドラム1は、直径が84mmであり、駆動源としての駆動モータ1a(図7)によって、中心支軸を中心に285mm/secのプロセススピード(周速度)で矢印R1方向に回転駆動される。
【0027】
3.帯電器
画像形成装置100は、帯電手段としてコロナ帯電器(帯電器)2を有する。図2は、帯電器2の外観を模式的に示す。図3は、帯電器2の一部の構成をより詳しく示す。
【0028】
帯電器2は、感光ドラム1の長手方向(回転軸線方向)に沿って感光ドラム1に対向配置され、放電により感光ドラム1の表面を帯電させる。帯電器2は、電気的なシールド作用(遮断作用)をなす支持筐体であるシールド(シールドケース)12を有する。シールド12は、電気的に接地されている。シールド12は、感光ドラム1の長手方向に沿って互いに略平行に対向して延在する2個の側板12b、12bと、両側板12b、12bの上端間を連結する天板12cと、を有する。これにより、シールド12は、感光ドラム1に対向する一面が開放され、帯電器2の長手方向(感光ドラム1の回転軸線方向と平行)に見た断面が略コの字形状とされている。即ち、シールド12の感光ドラム1に対向する側には、帯電器2の長手方向の長さ、帯電器2の短手方向(感光ドラム1の回転軸線方向と略直交する方向)の幅を有する矩形形状の開口部12aが形成されている。図3においては、シールド12の図中手前側(図1中左側)の側板12bは省いて示している。尚、所望により、天板12cは設けられていなくてもよい。
【0029】
帯電器2の長手方向におけるシールド12の両端部には、上記側板12b、12b、天板12cなどを保持する保持部材であるブロック17、17が結合され、シールド12と一体化されている。シールド12の側板12b、12b、天板12cはアルミニウムやステンレス鋼(SUS)などの金属(本実施例ではSUS)で形成され、ブロック17、17は樹脂などの電気絶縁性の材料(本実施例では樹脂)で形成されている。又、帯電器2は、シールド12の内部空間に軸線を有する放電電極である放電ワイヤ10を有する。放電ワイヤ10は、その軸線が帯電器2の長手方向(即ち、感光ドラム1の軸線方向)と略平行になるように、2個のブロック17間に張架されている。更に、帯電器2は、シールド12の感光ドラム1と対向する開口部12aに位置して、制御電極である板状のグリッド(グリッド電極)11を有する。
【0030】
放電ワイヤ10には第1の帯電電源18(図7)が接続されており、感光ドラム1の帯電処理を行う際には直流電圧が印加される。本実施例では、負極性の直流電圧が印加される。第1の帯電電源18が放電ワイヤ10に電圧を印加することにより、放電ワイヤ10でコロナ放電が発生する。又、グリッド11には第2の帯電電源19(図7)が接続されており、感光ドラム1の帯電処理を行う際には直流電圧が印加される。本実施例では、負極性の直流電圧が印加される。これは、放電ワイヤ10から感光ドラム1に向かうイオンの量を安定化させるためのものであり、その結果、感光ドラム1を所望の電位に帯電することが可能となる。
【0031】
更に説明すると、放電ワイヤ10には、外部電源である第1の帯電電源18が接続されている。この第1の帯電電源18から放電ワイヤ10に所定の極性(本実施例では負極性)・値の直流電圧を印加し、コロナ放電を発生させて、感光ドラム1の表面を帯電させる。放電ワイヤ10の材料としては、金属、例えば、ステンレススチール、ニッケル、モリブデン、タングステンなどを好適に用いることができる。本実施例では、放電ワイヤ10の材料として、金属の中で非常に安定性の高いタングステンを使用した。放電ワイヤ10の材料としてタングステンを使用することで、加熱、オゾン環境下という苛酷な条件下でも安定したコロナ放電を行うことができる。又、放電ワイヤ10の材料としてタングステンを使用することで、帯電器2を長期間にわたり安定して使用することが可能となる。放電ワイヤ10は、シールド12と一体化されたブロック17、17によって一定の張力で保持される。電気絶縁性の材料で形成されたブロック17、17によって、放電ワイヤ10とシールド12との間の電気的な絶縁が保たれている。放電ワイヤ10の直径は、40μm〜100μmであることが好ましい。放電ワイヤ10の直径が小さすぎると、放電によるイオンの衝突で切断されてしまうことがある。逆に、放電ワイヤ10の直径が大きすぎると、安定したコロナ放電を得るために必要な、放電ワイヤ10に印加する電圧が高くなってしまう。放電ワイヤ10に印加する電圧が高いと、オゾンが発生しやすくなり画像流れの発生確率が高くなり、又電源のコストが上昇しやすい。本実施例では、放電ワイヤ10の直径は60μmとした。
【0032】
又、板状のグリッド11には、外部電源である第2の帯電電源19として定電圧電源が接続されている。この第2の帯電電源19からグリッド11に印加するバイアスの制御により、整流効果を発揮させ、放電ワイヤ10におけるコロナ放電により発生し感光ドラム1に付与される電荷量を調整して、感光ドラム1の表面の帯電電位を制御する。本実施例では、グリッド11は、感光ドラム1に面する側と、放電ワイヤ10に面する側とを貫通する複数の孔が形成された多孔性(多孔質形状)の板状のグリッドである。即ち、本実施例では、板状のグリッド11は、メッシュ状に当該板状のグリッド11を貫通する複数の孔が形成されている。このような板状のグリッド11は、例えば、ステンレス鋼の薄板にエッチング処理により多数の開口部を形成することで作製することができる。より詳細には、本実施例では、グリッド11は、厚さ0.1mm〜0.5mm程度の平坦な板状のグリッド本体を貫通するように、メッシュ状の複数の貫通孔が形成されてなる。グリッド11は、シールド12の開口部12aに位置するようにしてシールド12に取り付けられ、感光ドラム1の外周面に近接して配置される。より詳細には、グリッド11は、複数の貫通孔が形成された領域がシールド12の開口部12aの内部に収まるように、ブロック17、17に固定される。尚、本実施例では、板状のグリッド11を用いたが、これに限定されるものではなく、例えばワイヤ形状のグリッドを用いてもよい。
【0033】
本実施例では、帯電器2は、放電ワイヤ10、グリッド11及びシールド12に付着した異物、即ち、トナー、外添剤又は紙粉などの飛散物、或いはコロナ放電により発生した放電生成物を清掃する放電ワイヤ清掃部材14、グリッド清掃部材15及びシールド清掃部材16を有する。尚、以下、放電ワイヤ清掃部材14、グリッド清掃部材15、シールド清掃部材16を総称する場合、単に「清掃部材」という。清掃部材については後述して詳しく説明する。
【0034】
4.露光装置
画像形成装置100は、帯電処理された感光ドラム1の表面に静電潜像を形成する露光手段(情報書き込み手段)として露光装置(レーザービームスキャナ)3を有する。本実施例では、露光装置3としては、半導体レーザーを用いたレーザービームスキャナを用いたが、これに限定されるものではなく、例えばLEDによる露光方式を採用してもよい。露光装置3は、感光ドラム1を画像情報に応じた光で走査露光する露光部と、制御装置のCPU(後述)からの情報に従って露光部による露光量を制御する露光量制御部とを有する。本実施例では、露光装置3の光量は、レーザー駆動パルスのパルス幅変調(PWM)によって制御される。当業者には周知のように、露光装置3の露光量制御部としてのパルス幅変調回路は、画像信号処理回路からの相対的に高濃度の画素画像信号に対して、相対的に幅の広いレーザー駆動パルスを生成する。又、パルス幅変調回路は、相対的に低濃度の画素画像信号に対して、相対的に幅の狭いレーザー駆動パルスを生成する。更に、パルス幅変調回路は、相対的に中濃度の画素画像信号に対して、中間の幅のレーザー駆動パルスを生成する。パルス幅変調回路から出力されたレーザー駆動パルスは、露光装置3の露光部に供給され、露光部はパルス幅に対応する時間だけ光源である半導体レーザーを発光させる。従って、半導体レーザーは、高濃度画素に対してはより長い時間にわたり駆動され、低濃度画素に対してはより短い時間にわたり駆動される。そのため、感光ドラム1は、高濃度画素に対しては主走査方向においてより長い範囲が露光され、低濃度画素に対しては主走査方向においてより短い範囲が露光される。つまり、画素の濃度に対応して静電潜像のドットサイズが異なることになる。
【0035】
5.現像装置
画像形成装置100は、現像手段として現像装置4を有する。現像装置4は、感光ドラム1上の静電潜像に現像剤のトナーを供給し、トナー像として可視化する。本実施例では、現像装置4として、2成分磁気ブラシ現像方式のものを用いた。又、本実施例では、現像装置4は、一様に帯電処理された感光ドラム1における、露光により電荷が減衰した露光部に、感光ドラム1の帯電極性(本実施例では負極性)と同極性に帯電したトナーを付着させる反転現像方式により、静電潜像を現像する。
【0036】
更に説明すると、現像装置4は、現像容器4aと、現像容器4aに回転可能に取り付けられた現像剤担持体としての現像スリーブ4bとを有する。現像容器4a内には、現像剤として主に非磁性トナー粒子(トナー)と磁性キャリア粒子(キャリア)とが混合された2成分現像剤が収容されている。トナーには、斯界にて一般に行われているように、トナーの流動性や帯電性の調整などのために、無機微粉体などとされる外添剤が添加されていてよい。本実施例では、キャリアの体積抵抗率は約5×108Ω・cm、平均粒径は35μmであった。トナーは、キャリアとの摺擦により負極性に摩擦帯電される。現像スリーブ4bは、感光ドラム1との最近接距離(S−Dギャップ)を約250μmに保持した状態で、感光ドラム1に対向して配置されている。感光ドラム1と現像スリーブ4bとの対向部が現像部となる。現像スリーブ4bは、現像部における感光ドラム1と現像スリーブ4bの表面の移動方向が互いに逆方向になるように回転駆動される。つまり、現像スリーブ4bは、感光ドラム1の矢印R1方向の回転に対して、順方向に回転駆動される。現像スリーブ4bの内側には、磁界発生手段としてのマグネットローラが設けられており、その磁力により、現像スリーブ4bの回転に伴って2成分現像剤が現像部に搬送される。現像部において、2成分現像剤は、現像スリーブ4bの表面から穂立ちした磁気ブラシの層を形成する。磁気ブラシの層は、現像剤コーティングブレード(図示せず)により所定の厚さの薄層として整えられる。又、現像スリーブ4bには、現像電源から所定の現像バイアスが印加される。本実施例では、現像スリーブ4bに印加される現像バイアスは、直流電流(Vdc)と交流電圧(Vac)とを重畳した振動電圧であり、直流電圧は−650V、交流電圧はVpp1800Vとした。この現像バイアスによって感光ドラム1と現像スリーブ4bとの間に形成される電界によって、感光ドラム1上の静電潜像に対応して、2成分現像剤中のトナーが感光ドラム1上に選択的に付着される。これにより、静電潜像がトナー像として現像される。本実施例では、感光ドラム1上に形成されたトナー像のトナーの帯電量は、約−30μC/gであった。現像部を通過した現像スリーブ4b上の2成分現像剤は、現像スリーブ4bの回転に伴い現像容器4a内の現像剤溜り部に戻される。
【0037】
6.転写装置
画像形成装置100は、中間転写ユニットとされる転写手段5を有する。転写装置5は、無端ベルト状の中間転写体である中間転写ベルト5bを有する。1次転写部材としての1次転写ローラ5aは、中間転写ベルト5bの内周面側に配置されており、中間転写ベルト5bを介して、感光ドラム1の表面に対し所定の押圧力で圧接されている。感光ドラム1と中間転写ベルト5bとのニップ部(接触領域)が、感光ドラム1から中間転写ベルト5bへのトナー像の転写が行われる転写部Tとなる。中間転写ベルト5bは、感光ドラム1と1次転写ローラ5aとの間に挟持されて搬送される。1次転写ローラ5aには、1次転写電源から、トナーの正規の帯電極性(本実施例では負極性)とは逆極性(本実施例では正極性)の直流電圧である1次転写バイアスが印加される。本実施例では、特に、+2.0kVの1次転写バイアスが印加される。これにより、感光ドラム1上のトナー像は、中間転写ベルト5bの表面に静電的に転写される。
【0038】
尚、本明細書では詳しい説明は省略するが、当業者には周知のように、中間転写ベルト5b上に転写されたトナー像は、次に2次転写部(図示せず)において、別途搬送されてきた転写材に転写される。
【0039】
7.クリーニング装置
画像形成装置100は、1次転写工程後の感光ドラム1の表面をクリーニングするクリーニング手段として、クリーニング装置7を有する。クリーニング装置7は、クリーニング部材としてのクリーニングブレード7a及びファーブラシ7bと、クリーニングブレード7a及びファーブラシ7bにより感光ドラム1から除去されたトナーを収容する回収トナー容器7cとを有する。本実施例では、クリーニングブレード7aは、弾性体材料であるウレタンゴムで形成された板状部材であり、感光ドラム1の長手方向に沿って延在し、感光ドラム1の表面に所定の押圧力で圧接されている。又、本実施例では、ファーブラシ7bは、感光ドラム1の長手方向に沿って延びる回転軸に複数本植設されたブラシ部を有し、該ブラシ部が感光ドラム1の表面に接触するようにして回転駆動される。1次転写工程後に感光ドラム1上に残留したトナーは、先ず、ファーブラシ7bにより感光ドラム1の表面から除去されて回収トナー容器7cに回収される。そして、ファーブラシ7bで回収されなかったトナーが、クリーニングブレード7aにより感光ドラム1の表面から除去されて、回収トナー容器7cに回収される。
【0040】
8.除電手段
画像形成装置100は、除電手段として、第1の前露光手段である帯電前露光器(前露光ランプ)8と、第2の前露光手段であるクリーニング前露光器(クリーニング前露光ランプ)9とを有する。これら2つの前露光手段により、1次転写工程後の感光ドラム1の表面の電位をリセットすることにより、ゴーストの発生を防止する。本実施例では、帯電前露光器8及びクリーニング前露光器9として、中心波長660nmのスタンレー社製のLEDチップ(発光部)をアレイ状に加工したものを使用した。帯電前露光器8及びクリーニング前露光器9は、感光ドラム1の表面電位の少なくとも一部を除電(リセット)する除電手段(表面電位リセット手段)を構成する。帯電前露光器8及びクリーニング前露光器9は、それぞれの駆動制御部としての帯電前露光器駆動回路、クリーニング前露光器駆動回路に接続されている。帯電前露光器駆動回路及びクリーニング前露光器駆動回路はそれぞれ、制御手段としての情報集積回路によって、光照射のON/OFFタイミング、出力値(光量)などの条件が制御される。
【0041】
9.定着器
画像形成装置100は、2次転写部(図示せず)にて転写材に転写されたトナー像を転写材に定着させる定着手段として加熱及び加圧式の定着器(図示せず)を有する。本実施例では、定着器は熱ローラ式のものであり、加熱ローラとこれに圧接する加圧ローラとで形成されるニップ部(接触領域)において転写材を加熱及び加圧しながら搬送することで、トナー像を転写材に定着させる。トナー像の定着処理を受けた転写材は、画像形成物(プリント、コピー)として画像形成装置100から出力される。
【0042】
10.放電ワイヤ清掃部材
図3に示すように、帯電器2は、放電ワイヤ10に付着した異物を清掃するための放電ワイヤ清掃部材14を有する。放電ワイヤ清掃部材14は、支持体13に保持されている。本実施例では、放電ワイヤ清掃部材14は、支持体13に保持された状態で互いに圧接すると共にその間に放電ワイヤ10を挟持する、2個の矩形形状のパッドで構成されている。放電ワイヤ清掃部材14は放電ワイヤ10に圧接した状態で移動して放電ワイヤ10を清掃する。本実施例では、放電ワイヤ清掃部材14と放電ワイヤ10とが接する部位は、放電ワイヤ10に押されて凹状になっている。但し、放電ワイヤ清掃部材14の形状はこれに限定されるものではない。例えば、放電ワイヤ清掃部材14は、放電ワイヤ10の外周形状と同様な円弧状の切込みを入れて、放電ワイヤ10からの摩擦抵抗を軽減させてもよい。但し、このような形状の場合、放電ワイヤ10の外周の半分以上が放電ワイヤ清掃部材14から摩擦抵抗を受けるような配置にすることが望まれる。本実施例では、放電ワイヤ清掃部材14の各パッドには、スポンジを基材として、放電ワイヤ10に接触するその表層にゴム層を設けて、その表層に研磨粒子であるアルミナを塗布し、樹脂結着させたものを用いた。
【0043】
放電ワイヤ清掃部材14は、支持体13が清掃部材移動機構(後述)によって帯電器2の長手方向に移動させられることによって、放電ワイヤ10を摺擦して、それに付着していた異物を拭き取る。本実施例では、放電ワイヤ清掃部材14の移動による放電ワイヤ10の清掃動作は、画像形成装置100の電源ON時又は一定枚数の画像形成を行う毎に行われる。
【0044】
11.グリッド清掃部材
図3に示すように、帯電器2は、グリッド11、より詳細には、その放電ワイヤ10に対向する側の側面に付着した異物を清掃するためのグリッド清掃部材15を有する。グリッド清掃部材15は、支持体13に保持されている。本実施例では、グリッド清掃部材15は、支持体13とグリッド11とで挟持されて圧縮された状態で支持体13に保持された、矩形形状のパッドで構成されている。グリッド清掃部材15はグリッド11に圧接した状態で移動してグリッド11を清掃する。本実施例では、帯電器2の短手方向の長さは、グリッド11の同方向の長さより長く設定されている。本実施例では、グリッド清掃部材15として、繊維を基布に織り込むことにより形成された、基材の表層にブラシを設けたブラシ状の清掃部材を用いた。より詳細には、本実施例では、グリッド清掃部材15には、アクリル系ブラシを基布に織り込んだ部材を使用した。但し、グリッド清掃部材15を構成する材料はこれに限定されるものではなく、ナイロン、PVC、PPSなどを使用してもよい。又、グリッド清掃部材15は、植毛系の部材に限らず、フェルト、スポンジのような弾性部材や、アルミナ、炭化珪素などの研磨剤を塗布したシートなどを利用してもよい。グリッド11への接触時の力学的な抵抗が、グリッド11の清掃に不都合を生じなければ、任意の清掃部材を用いることができる。
【0045】
グリッド清掃部材15は、支持体13が清掃部材移動機構(後述)によって帯電器2の長手方向に移動させられることによって、グリッド11の放電ワイヤ10に対向する面を摺擦して、それに付着していた異物を拭き取る。本実施例では、グリッド清掃部材15の移動によるグリッド11の清掃動作は、画像形成装置100の電源ON時又は一定枚数の画像形成を行う毎に行われる。
【0046】
12.シールド清掃部材
図3に示すように、帯電器2は、シールド12、より詳細には、その側板12b、12bの放電ワイヤ10に対向する内面に付着した異物を清掃するためのシールド清掃部材16を有する。シールド清掃部材16は、支持体13に保持されている。本実施例では、シールド清掃部材16は、支持体13とシールド12とで挟持されて圧縮された状態で支持体13に保持された、矩形形状のパッドで構成されている。シールド清掃部材16はシールド12に圧接した状態で移動してシールド12を清掃する。本実施例では、シールド清掃部材16として、繊維を基布に織り込むことにより形成された、基材の表層にブラシを設けたブラシ状の清掃部材を用いた。より詳細には、本実施例では、シールド清掃部材16には、アクリル系ブラシを基布に織り込んだ部材を使用した。但し、シールド清掃部材16を構成する材料はこれに限定されるものではなく、ナイロン、PVC、PPSなどを使用してもよい。又、シールド清掃部材16は、植毛系の部材に限らず、フェルト、スポンジのような弾性部材や、アルミナ、炭化珪素などの研磨剤を塗布したシートなどを利用してもよい。シールド12への接触時の力学的な抵抗が、シールド12の清掃に不都合を生じなければ、任意の清掃部材を用いることができる。尚、図3においては、シールド12の図中手前側(図1中左側)の側板12bを清掃するシールド清掃部材16は省いて示している。
【0047】
シールド清掃部材16は、支持体13が清掃部材移動機構(後述)によって帯電器2の長手方向に移動させられることによって、シールド12の側板12b、12bの放電ワイヤ10に対向する内面を摺擦して、それに付着していた異物を拭き取る。本実施例では、シールド清掃部材16の移動によるシールド12の清掃動作は、画像形成装置100の電源ON時又は一定枚数の画像形成を行う毎に行われる。
【0048】
本実施例では、放電ワイヤ清掃部材14、グリッド清掃部材15及びシールド清掃部材16を配設する。ことにより、帯電器2に付着する異物をより良好に清掃することができる。放電ワイヤ清掃部材14、グリッド清掃部材15及びシールド清掃部材16のうち少なくとも1つを有し、帯電器2に付着した異物を除去することで、帯電器2の長手方向における放電電流分布をより均一な状態に復帰させることができる。典型的には、グリッド清掃部材15又は放電ワイヤ清掃部材14を有する。
【0049】
13.清掃部材移動機構
図6は、本実施例の画像形成装置100の帯電器2の周囲を側方から見た様子を示す。図6に示すように、本実施例では、帯電器2には、清掃部材を駆動する清掃部材駆動手段としての清掃部材移動機構20が設けられている。清掃部材移動機構20は、駆動軸としてのスクリュー軸21と、スクリュー軸21を回転駆動する駆動源としてのモータ22と、支持体13と、を有して構成される。スクリュー軸21は、その長手方向が帯電器2の長手方向と略平行となるように配置されており、らせん状の溝がその長手方向にわたって周面に形成されている。本実施例では、スクリュー軸21は、ブロック17、17に回転可能に支持されている。このらせん状の溝が、支持体13に設けられた駆動係合部13aに螺合している。従って、モータ22によりスクリュー軸21が正転することにより支持体13は一方向に移動し、又モータ22によりスクリュー軸21が逆転することにより支持体13は逆方向に移動する。このように、支持体13が往復移動することによって、支持体13に保持された放電ワイヤ清掃部材14、グリッド清掃部材15及びシールド清掃部材16による清掃動作を実行することができる。本実施例では、放電ワイヤ清掃部材14、グリッド清掃部材15及びシールド清掃部材16は、同じ支持体13に保持されており、同じ清掃部材移動機構20により、同期して駆動される。
【0050】
清掃動作時以外においては、放電ワイヤ清掃部材14、グリッド清掃部材15及びシールド清掃部材16は、それぞれ清掃対象である放電ワイヤ10、グリッド11及びシールド12に対して離間するように帯電器2の手前側(図1の紙面手前側)に待機している。又、本実施例では、清掃動作時には、放電ワイヤ清掃部材14、グリッド清掃部材15及びシールド清掃部材16は、それぞれ清掃対象である放電ワイヤ10、グリッド11及びシールド12に一定量侵入しながら、帯電器2の長手方向におけるそれぞれの略全域を清掃するように清掃部材移動機構20により往復移動させられる。
【0051】
尚、放電ワイヤ清掃部材14、グリッド清掃部材15又はシールド清掃部材16は、清掃動作時に、帯電器2の長手方向の任意の箇所にて清掃対象たる放電ワイヤ10に接触するように構成されていてもよい。例えば、放電ワイヤ清掃部材14では、上記任意の箇所にて放電ワイヤ10を挟持するようにする。
【0052】
又、本実施例では、往復移動における所要時間は合計30秒となっており、往路15秒、復路15秒に設定されている。往復移動終了時には、帯電器2の手前側に光学センサによる清掃部材ホームポジションセンサ(図示せず)が配設されている。これにより、万が一放電ワイヤ清掃部材14、グリッド清掃部材15及びシールド清掃部材16が帯電器2の長手方向の途中で止まった場合にはCPU(後述)が異常を判断できるようになっている。
【0053】
又、上述のように帯電器2の長手方向の任意の箇所にて放電ワイヤ清掃部材14、グリッド清掃部材15又はシールド清掃部材16を清掃対象に接触させる場合、清掃部材移動機構20の駆動開始からの時間をCPU(後述)が計測することにより上記任意の位置を把握し、その所定の時間を持って接触させる。
【0054】
本実施例では、ワイヤ清掃部材14、グリッド清掃部材15、シールド清掃部材16は同一の支持体13に保持され、同一の移動機構20にて移動させる。しかし、このような移動機構に限定されず、それぞれを別個の移動機構にて移動させる構成としてもよい。
【0055】
14.放電電流分布の検出
本実施例では、帯電器2のグリッド11と感光ドラム1との間に、帯電器2の長手方向における放電電流分布を検出するための放電電流検出手段としての放電電流センサ30を有する。
【0056】
図4は、本実施例における放電電流センサ30の概略構成を示す。放電電流センサ30は、検出部材としての検出電極31と、検出電極31による検出出力を生成する回路部としての検出回路36を有する。放電電流センサ30は、少なくともその検出電極31が後述する検出電極移動機構40(図6)により帯電器2の長手方向に沿って一定速度にて移動し、帯電器2がコロナ放電を行っているときに、帯電器2の長手方向における放電電流分布を検出するように構成されている。
【0057】
本実施例では、図5に示すように、検出電極31は、感光ドラム1の曲率と同じ曲率をもってグリッド11と感光ドラム1との間に配置される。そのため、検出電極31は、グリッド11と感光ドラム1との間における空間電流分布を感光ドラム1上に流入する電流分布とほぼ同じ状態で検出すること可能なように構成されている。
【0058】
本実施例では、図4に示すように、検出電極31は、電気的に接地されていない基部32の表面上に、電気的に接地された第1の電極部33、第2の電極部34及び第3の電極部35が設けられて構成されている。第2、第3の電極部34、35は、基部32上で所定の間隔をあけて第1の電極部33を挟むように配置されており、又これら第2、第3の電極34、35は互いに電気的に接続されている。そして、検出電極31は、第1、第2、第3の電極部33、34、35が設けられた側の基部32の表面をグリッド11に対向させて、第1電極部33を主検出領域とする。第1、第2、第3の電極33、34、35は、基部32の表面に接着されている。
【0059】
検出回路36において、第1の電極部33は電気抵抗37を介して電気的に接地され、第1の電極部33に流入した電流は電気抵抗37の両端間に電気的に接続された電圧測定回路38により電圧値に変換されて測定される。電圧測定回路38の測定結果とされる検出回路36の検出結果は、画像形成装置100の制御装置50(図7)に入力され、この制御装置50に設けられた記憶部52に記憶される。このように、本実施例では、帯電器2の長手方向における放電電流分布は、検出電圧分布に変換されて記録される。
【0060】
本実施例では、第1、第2、第3の電極部33、34、35は、いずれも平面視矩形形状を有し、それぞれの長手方向は略平行に配置されている。本実施例では、第1の電極部33の短手方向の幅W1と、第2、第3の電極部34、35のそれぞれの短手方向の幅W2とは、W1<W2の関係となっている。本実施例では、第2、第3の電極部34、35の幅は同じである。そして、第1の電極部33と、第2、第3の電極部34、35のそれぞれとの間には、所定の間隔W3が設けられている。本実施例では、第1、第2、第3の電極部33、34、35の短手方向が、検出電極31の移動方向とされる。このように、電気的に接地された第1の電極部33と第2、第3の電極部34、35のそれぞれとの間に、電気的に接地されていない基部(非接地部)32が露出した領域を挟むことにより、次のような効果が得られる。即ち、第1の極部33の直下以外の放電電流を第2、第3の電極部34、35に流れ込ませることにより検出誤差を防止し、且つ、基部32によって挟むことにより第1の電極部33の直下のみの領域の放電電流を検出することができる。このことから、グリッド11を通過した後の放電電流をより正確に検出することができる。
【0061】
本実施例では、第1の電極部33の短手方向の幅W1を1mm、第2、第3の電極部34、35の短手方向の幅W2を3cmとした。又、本実施例では、第1、第2、第3の電極部33、34、35の厚さは、いずれも10μmとした。又、本実施例では、第1の電極部33と第2、第3の電極部34、35のそれぞれとの間隔W3は、1mmとした。又、本実施例では、第1、第2、第3の電極部33、34、35の長手方向の長さLは同じであり、5cmとした。又、基部32は、これら第1、第2、第3の電極部33、34、35がその表面上に形成できる十分の大きさを有する。
【0062】
尚、本実施例では、基部32は絶縁部材で構成した。特に、本実施例では、基部32は、樹脂のモールド成形により形成された。本実施例では基部32を構成する樹脂として、PET(ポリエチレンテレフタレート)を用いた。又、本実施例では、第1、第2、第3の電極部33、34、35は、ステンレス鋼(SUS304)にて構成した。
【0063】
15.検出電極移動機構
図6に示すように、本実施例では、帯電器2には、検出電極31を感光ドラム1の回転軸線方向に沿って移動させる移動手段としての検出電極移動機構40が設けられている。検出電極移動機構40は、駆動軸としてのスクリュー軸41と、スクリュー軸41を回転駆動する駆動源としてのモータ42と、検出電極支持部材43と、を有して構成される。検出電極30は、検出電極支持部材43に保持され、スクリュー軸41を介して帯電器2に移動可能に支持されている。スクリュー軸41は、その長手方向が帯電器2の長手方向と略平行となるように配置されており、らせん状の溝がその長手方向にわたって周面に形成されている。本実施例では、スクリュー軸41は、ブロック17、17に回転可能に支持されている。このらせん状の溝が、検出電極支持部材43に設けられた駆動係合部43aに螺合している。従って、モータ42によりスクリュー軸41が正転することにより検出電極支持部材43は一方向に移動し、又モータ42によりスクリュー軸41が逆転することにより検出電極支持部材43は逆方向に移動する。このように、検出電極支持部材43が往復移動することによって、電極支持部材43に保持された検出電極30による放電電流の検出動作を実行することができる。
【0064】
本実施例では、検出電極移動機構40は、検出電極30を、帯電器2の長手方向に沿って約56mm/secにて移動させる。検出電極31の移動速度は、帯電器2の長手方向における放電電流分布を検出できる範囲であれば、本実施例の移動速度に限定されるものではない。本実施例では、本実施例の構成において最も良好な感度が得られる検出電極31の移動速度を適用した。
【0065】
16.制御装置
図7は、本実施例の画像形成装置100の制御系を示す。
【0066】
本実施例では、画像形成装置100の動作は、画像形成装置100に設けられた制御装置50が統括的に制御する。制御装置50は、制御手段としてのCPU51、記憶手段としての記憶部(ROM、RAMなど)52を有する。制御装置50は、記憶部52に格納されたプログラムやデータに従って、画像形成装置100の各部をシーケンス動作させることができる。本実施例との関連において、制御装置50は、感光ドラム1の駆動源(駆動モータ)1a、放電ワイヤ10に電圧を印加する第1の帯電電源18、グリッド11に電圧を印加する第2の帯電電源19、感光ドラム1を走査露光する露光装置3の動作を制御する。又、本実施例との関連において、制御装置50は、清掃部材移動機構20(より詳細にはそのモータ22)、検出電極移動手段40(より詳細にはそのモータ42)の動作を制御する。又、制御装置50は、放電電流センサ30による検出動作の開始、停止などの動作を制御すると共に、放電電流センサ30(より詳細にはその検出回路36)から検出信号が入力される。又、制御装置50には、画像形成装置100に設けられた操作パネル60が接続されている。本実施例では、操作パネル60には、表示手段としての液晶表示部などとされる表示部61と、操作手段としての操作キーなどとされる操作部62とが設けられている。そして、操作パネル60を介して、制御装置50からの情報に従った情報の表示、制御装置50への情報の入力ができるようになっている。
【0067】
本実施例では、詳しくは後述するように、制御装置50のCPU51が、帯電器2が放電を行っている間に検出電極移動機構40により検出電極31を移動させて放電電流センサ30によって帯電器2からの放電電流を検出し、感光ドラム1の回転軸線方向に沿う方向におけるグリッド11を通過した後の帯電器2からの放電電流分布を取得する取得手段の機能を有する。又、本実施例では、このCPU51が、取得手段により取得された2つの放電電流分布を比較する比較手段の機能を有する。更に、本実施例では、このCPU51が、比較手段による比較の結果、2つの放電電流分布の間で放電電流に所定量以上の差があると判断した領域については、対応する感光ドラム1の回転軸線方向の位置を露光する際の画像濃度信号に対する露光装置3の露光量を補正する補正手段の機能を有する。
【0068】
17.露光量制御
本実施例では、画像形成装置100は、感光ドラム1に対して放電を行う放電ワイヤ10、感光ドラム1との対向部に配置され感光体上の電位を制御するグリッド11を備えた帯電器2を有する。又、画像形成装置100は、帯電器2によって帯電させられた感光ドラム1を露光して静電潜像を形成する露光装置3を有する。又、画像形成装置100は、感光ドラム1とグリッド11との間に配置される検出電極31によりグリッド11を通過した後の帯電器2からの放電電流を検出する放電電流センサ30を有する。又、画像形成装置100は、検出電極31を帯電器2の長手方向に沿って移動させる検出電極移動機構40を有する。そして、本実施例では、放電電流センサ30を用いて帯電器2の長手方向における放電電流分布を検出する。これにより、感光ドラム1の長手方向において電位斑が発生する可能性を判断することができる。従って、本実施例では、上記放電電流分布を検出した結果に基づいて、感光ドラム1の長手方向において電位斑が発生する可能性がある状態であることが判断された場合に、画像形成時における露光装置3の露光量の補正を実行する。
【0069】
本実施例によれば、帯電器2の長手方向における放電電流分布が基準となる分布(初期値)に比べて、感光ドラム1の帯電斑が発生する可能性がある程度まで変化したか否かに応じて、画像形成時における露光量の補正を実行する。これにより、帯電器2の長手方向において、グリッド11、放電ワイヤ10又はシールド12が局所的に汚れた場合でも、この局所的な汚れの見落としを抑制し、感光ドラム1の長手方向の帯電斑が発生している場合でも、露光量の補正によって画像濃度斑の発生を抑制することができる。又、本実施例によれば、リアルタイムな帯電器2の長手方向における汚染部位の変化に対応することができる。尚、本実施例によれば、所望により清掃部材による帯電器2の清掃を行う頻度を低減することができる。その場合、清掃部材の摩耗を抑制することも可能となる。以下、更に詳しく説明する。
【0070】
図8は、本実施例における露光量制御の流れを示す。
【0071】
CPU51は、画像形成装置100が設置された際或いは新品の帯電器2に交換された際に、初期状態の検出のために放電電流センサ30を動作させて、初期値F(x)を取得する(S101)。
【0072】
尚、初期値F(x)は、図10のグラフに示すように、検出範囲(横軸)と検出電圧(縦軸)との関係をプロットしたものである。CPU51は、放電電流センサ30によって検出されて制御装置50に入力された検出電圧に係る情報を記憶部52に記憶させ、初期値F(x)を完成させる。
【0073】
次に、画像形成が開始されると(S102)、CPU51は、検知判断指数Pnを算出し、所定の閾値Qと比較する(S103)。本実施例では、検知判断指数Pnを現在の累計画像形成枚数とした。CPU51は、検知判断指数Pnが閾値Q以上(Pn≧Q)となった場合に、放電電流センサ30を動作させて、現在の状態に対応した現在値G(x)を取得する(S104)。本実施例では、Q=2000枚に設定した。
【0074】
尚、現在値G(x)は、上記関係Pn≧Qが成立した時点での放電電流センサ30により検出された結果を集積したものであり、上記初期値F(x)と同様、図10に示すようなグラフで表現できる。CPU51は、放電電流センサ30によって検出されて制御装置50に入力された検出電圧に係る情報を記憶部52に記憶させ、現在値F(x)を完成させる。
【0075】
次に、CPU51は、記憶部52から初期値F(x)と現在値G(x)とを呼び出し、これらの比較を実行し、初期値F(x)と現在値G(x)との差分、即ち、帯電器2の初期の放電電流分布の状態と現在の放電電流の状態との間の変化の程度を示す情報を取得する(S105)。
【0076】
CPU51は、S105の結果に基づき、露光装置3の露光量の変更が必要であるか否かの判断(露光量変更判断)を実行する(S106)。
【0077】
そして、CPU51は、S106において変更が必要と判断した場合、露光量補正を実施する(S107)。この方法については後述して更に詳しく説明する。
【0078】
CPU51は、露光量補正を終了した後、検知判断指数Pnを初期化し(S108)、制御を終了する。
【0079】
尚、図8では、便宜上、上記の一連の判断、動作の終了後に制御を終了するものとしているが、画像形成動作が繰り返されている限り、S102以降の一連の判断、動作を繰り返し行うこととなる。
【0080】
又、図8では、便宜上、画像形成装置100が設置されるなどしてから、露光量補正の実施の要否を判断し、そして実施するまでの一連の流れについて示しているが、一旦初期値F(x)が取得されれば、例えばその後新品の帯電器2に交換されるまではS101は実行する必要はない。
【0081】
又、S107において、画像形成装置100に設けられた操作パネル60の表示部61にて、露光量補正動作中であることを示す情報を表示させてもよい。
【0082】
又、本実施例では、検知判断指数Pn、閾値Qを画像形成枚数を累積した累積画像形成枚数で設定した。しかし、これに限定されるものではなく、帯電器2の使用量に相関する値、例えば帯電器2による帯電時間を累積した累積帯電時間などで設定してもよい。即ち、典型的には、放電電流分布の測定は、所定の画像形成枚数毎又は帯電器2による感光ドラム1の所定の帯電時間毎に実行することができる。
【0083】
18.シーケンス
次に、上記露光量制御における画像形成装置100のシーケンス制御について説明する。
【0084】
図9は、本実施例における露光量制御における画像形成装置100のシーケンス制御の一例のタイミングチャートを示す。
【0085】
図9は、横軸に時間軸、縦軸に制御時における各部の動作のON/OFF状態を示す。ONは動作状態(電圧印加状態、駆動状態)を示し、OFFは非動作状態(電圧非印加状態、非駆動状態)を示す。
【0086】
放電電流センサ30による検出動作が実行される際には、その実行前に感光ドラム1の回転駆動が開始されて、安定回転になる時間が確保される。
【0087】
次に、検出電極31が帯電領域(帯電器2の開口部12aと感光ドラム1との間)から退避している放電電流センサ30の検出回路36がONにされ、更に第1、第2の帯電電源18、19がONにされて帯電器2によるコロナ放電により感光ドラム1が帯電させられる。本実施例では、帯電器2の長手方向における放電電流分布(初期値F(x)及び現在値G(x))を測定する際の放電ワイヤ10、グリッド11に印加する電圧、感光ドラム1の回転速度などの帯電条件は、画像形成時と同じとした。
【0088】
帯電状態が安定した時点で、検出電極移動機構40による検出電極31の移動が開始され、検出電極31がグリッド11と感光ドラム1との間を帯電器2の長手方向に沿って移動しながら電界分布を検出する。尚、帯電器2の長手方向における放電電流分布は、検出電極31が移動する際の往路、復路のいずれにおける検出結果から求めてもよい。
【0089】
検出電極31による帯電器2の長手方向における検出範囲の全域の検出が終了し、前述のようにして露光量変更判断が実行され、露光量を変更する必要がある場合には、次の作像時において、変更した露光量で露光装置3が制御されて画像形成が実行される。
【0090】
図10は、図9と同様に、本実施例における露光量制御における画像形成装置100のシーケンス制御の一例のタイミングチャートを示している。図10に示す例では、放電電流センサ30による検出動作を実行する前に、作像終了後、清掃部材による帯電器2の清掃が実行されている。
【0091】
清掃部材による帯電器2の清掃が終了した後、放電電流センサ30による検出動作が実行される前に、感光ドラム1の回転駆動が開始されて、安定回転になる時間が確保される。
【0092】
次に、検出電極31が帯電領域(帯電器2の開口部12aと感光ドラム1との間)から退避している放電電流センサ30の検出回路36がONにされ、更に第1、第2の帯電電源18、19がONにされて帯電器2によるコロナ放電により感光ドラム1が帯電させられる。
【0093】
帯電状態が安定した時点で、検出電極移動機構40による検出電極31の移動が開始され、検出電極31がグリッド11と感光ドラム1との間を帯電器2の長手方向に沿って移動しながら電界分布を検出する。
【0094】
検出電極31による帯電器2の長手方向における検出範囲の全域の検出が終了し、前述のようにして露光量変更判断が実行され、露光量を変更する必要がある場合には、次の作像時において、変更した露光量で露光装置3が制御されて画像形成が実行される。
【0095】
19.露光量変更判断
次に、本実施例における露光量変更判断の方法について説明する。
【0096】
本実施例では、取得手段としてのCPU51が帯電器2の長手方向における放電電流分布を取得し、比較手段としてのCPU51が取得された2つの放電電流分布を比較する。そして、補正手段としてのCPU51が、上記比較の結果、2つの放電電流分布の間で放電電流に所定量以上の差(絶対値)があると判断した領域については、対応する感光ドラム1の回転軸線方向の位置を露光する際の画像濃度信号に対する露光装置3の露光量を補正する。上記所定値は、感光ドラム1の長手方向の電位斑による画像不良が許容し得る程度を超える場合の閾値として予め求めておくことができる。より詳細には、本実施例では、補正手段としてのCPU51は、上記差があると判断した領域については、対応する感光ドラム1の回転軸線方向の位置を画像濃度信号に応じて露光装置3で露光した後の感光ドラム1の電位が、次のようになるような補正を行う。即ち、2つの放電電流分布のうち基準となる放電電流分布が取得された際の状態の帯電器2で帯電させた感光ドラム1を同画像濃度信号に応じて露光装置3で露光した後の感光ドラム1の電位に近づくように、画像濃度信号に対する露光装置3の露光量を補正する。以下、更に詳しく説明する。
【0097】
図11は、本実施例の画像形成装置100において、帯電器2として新品の帯電器2を使用した場合と、使用後の2種のグリッド11を装着した帯電器2を使用した場合とにおける、帯電器2の長手方向における放電量分布を検出した結果を示す。上記使用後の2種類のグリッドは、いずれも新品のグリッドを経時劣化させたものである。図11において「新品」と表したグラフが新品の帯電器2を使用した場合、「使用後1」、「使用後2」と表したグラフがそれぞれ使用後の異なるグリッドを装着した帯電器2を使用した場合の結果である。図11は、横軸に時間、縦軸に検出電圧を示している。尚、横軸の検出範囲iは、第1の電極部33が帯電器2の下を通過したときの、対応する感光ドラム1上の画像形成に必要な帯電領域における位置を表している(単位は任意)。この検出範囲iは、帯電器2の長手方向における放電電流分布の所望の検出精度との関係で許容し得る適宜の刻み幅で区切ることができる。又、この検出範囲iにおける各位置は、感光ドラム1の回転軸線方向における露光位置と関係づけられている。
【0098】
図11から、使用後1では、帯電器2の長手方向において非均一な放電電流分布となっていることが分かる。実際に使用後1の帯電器2を使用して画像形成を実行した場合、副走査方向のスジ(濃度斑)などの画像不良の発生が確認された。他方、使用後2では、新品と同様にほぼ均一な放電電流分布となっていることが分かる。従って、図11に示すようなグラフから、使用後2の帯電器2が新品の帯電器2と同様の帯電均一性を有することが判断できる。実際に使用後2の帯電器2を使用して画像形成を実行しても、画像不良の発生は確認されなかった。
【0099】
尚、ここでは、グリッド11が局所的に汚れた場合における、帯電器2の長手方向における放電電流分布が不均一となった場合についての結果を示した。同様に、放電ワイヤ10、シールド12がそれぞれ局所的に汚れた場合にも帯電器2の長手方向における放電電流分布が不均一となることがある。本発明者の検討によれば、局所的な汚れによって帯電器2の長手方向における放電電流分布の均一性に与える影響は、グリッド11、放電ワイヤ10、シールド12の順に小さくなる。従って、本実施例の制御の効果は、グリッド11、放電ワイヤ10、シールド12のうちグリッド11の汚れに対して最も効果が高く、次に放電ワイヤ10の汚れに対する効果が高く、シールド12の汚れに対する効果は最も小さい。
【0100】
本実施例では、図11に示すような帯電器2の長手方向における放電電流量分布の情報を取得し、その放電電流量分布から予測される感光ドラム1の長手方向の電位分布に応じて、感光ドラム1の長手方向(主走査方向)の所定範囲毎の領域に対する露光量を補正する。即ち、本実施例では、帯電器2の長手方向における放電電流分布を検出した結果に基づいて、露光装置3における感光ドラム1の長手方向における露光量分布を制御する。これにより、感光ドラム1の長手方向の電位斑を解消する。
【0101】
図12は、新品の帯電器2についての放電電流センサ30の検出電圧値との差分値ΔV1に対する感光ドラム1の電位変化量ΔV2の相関図である。
【0102】
本実施例は、上述のように制御装置50の記憶部52に新品の帯電器2についての放電電流センサ30の検出電圧値を示す初期値F(x)が記憶されている。従って、制御装置50のCPU51は、現在の帯電器2についての放電電流センサ30の検出電圧値を示す現在値G(x)を取得した際に、両者を比較することができる。これにより、新品時に対する検出電圧値の差分値ΔV1を求めて、図12に示すような関係から新品時に対する感光ドラム1の電位変化量ΔV2を求めることができる。このとき、検出電圧値の差分値ΔV1の絶対値が、上記所定量としての所定の閾値未満の場合には、露光量の補正を行わないこととすることができる。勿論、当該閾値を実質的にゼロとして、検出電圧値に少しでも差がある場合には露光量の補正を行うようにしてもよい。
【0103】
更に説明すると、本実施例では、制御装置50の記憶部52に、予め図12に示すような検出電圧値の差分値ΔV1と感光ドラム1の電位変化量ΔV2との関係を示す情報を格納しておく。このとき、検出電圧値の差分値ΔV1は、放電電流センサ30の検出範囲における一定の長さ毎の平均電圧値の差分(平均差分値)とする。又、感光ドラム1の電位変化量ΔV2は、帯電器2の長手方向において上記一定の長さ毎の検出範囲に対応する範囲の感光ドラム1の周方向における表面電位の平均値(平均変化量)とする。本実施例では、この一定の長さは感光ドラム1の電位検出時における視野角を考慮し、3cmとした。
【0104】
露光量変更判断を行うにあたり、制御装置50のCPU51は、初期値F(x)と現在値G(x)とから、上記一定の長さ毎の検出電圧値の差分値ΔV1(平均差分値)を求める。そして、CPU51は、上述のように予め記憶部52に格納されている検出電圧値の差分値ΔV1(平均差分値)に対する感光ドラム1の電位変化量ΔV2(平均変化量)から、現在の感光ドラム1の上記一定の長さ毎の電位変化量ΔV2(平均変化量)を求める。このようにして、CPU51は、放電電流センサ30の検出電圧値を感光ドラム1の電位変化量に変換することができる。
【0105】
次に、CPU51は、電位変化量ΔV2が決定した時点で、画像形成時において使用する露光光量に対して補正を実行する。このときの補正量は、図13に基づき算出する。図13は、本実施例における潜像コントラスト量(V)(縦軸)と露光装置3の光量レベル(横軸)との関係を示す。ここで、潜像コントラスト量は、帯電器2で帯電された感光ドラム1の帯電電位Vdと、帯電器2で帯電された後に露光装置3で露光されることで電位が変化させられた部分(露光部)の電位Vlとの電位差(|Vd−Vl|)である。又、露光装置3の光量レベルは、パルス幅変調により制御され、入力レベルの最小値0から最大値255までの256レベルとされる。
【0106】
例えば、放電電流センサ30による検出結果から、帯電器2の長手方向の一部において検出電圧値の差分値ΔV1が0.2(V)であった場合について考える。この場合、図12に示す検出電圧値の差分値ΔV1と感光ドラム1の電位変化量ΔV2との関係より、帯電器2の新品時に比べて感光ドラム1の帯電電位(絶対値)は約10V低い状態であることが分かる。この帯電電位(絶対値)の低下分を補正するためには、露光装置3による露光量を上げて露光部電位(絶対値)を低下させる必要がある。図14は、感光ドラム1の帯電電位(絶対値)が低下した場合に、露光量を上げて潜像コントラスト量を維持する補正を模式的に示す。実線が補正前の電位関係、一点鎖線が補正後の電位関係を示す。
【0107】
次に、制御装置50のCPU51は、この約10V分の潜像コントラスト量を補正するために、図13を用いる。即ち、例えば現在の露光光量が192の場合、この現在の露光光量に対して約10Vの電位差を補正するために必要な補正量を、図13の関係から近似計算にて決定する。上記例の場合、光量レベルを10上げる制御を実行することとなる。このように、CPU51は、露光量変更判断において露光量を変更する必要があると判断した感光ドラム1の長手方向の一定の長さの領域毎に、当該領域内の露光部電位を得るための露光装置3の光量を補正する。
【0108】
そして、CPU51は、上述のようにして露光光量を決定した段階で、次の画像形成時において感光ドラム1の長手方向において露光量の必要な領域(即ち、帯電器2の局所的な汚染部に対応する領域)のみ露光量が補正された状態で画像形成を実行する。この状態は、次回検知判断指数Pnである累計画像形成枚数が所定の閾値になるまで継続され、その間副走査方向のスジ(濃度斑)などの画像不良が抑制された均一な画像を形成することが可能となる。
【0109】
以上、本実施例によれば、感光ドラム1の長手方向の帯電斑が発生している場合でも、露光量の補正によって画像濃度斑の発生を抑制することができる。又、本実施例によれば、リアルタイムな帯電器2の長手方向における汚染部位の変化に対応することができる。
【0110】
実施例2
次に、本発明の他の実施例について説明する。本実施例の画像形成装置の基本的な構成及び動作は実施例1のものと同じである。従って、実施例1のものと同一又はそれに相当する機能、構成を有する要素には同一符号を付して詳しい説明は省略する。
【0111】
本実施例では、帯電器2は、グリッド11と感光ドラム1との間に、遮蔽部材を有し、この遮蔽部材の一部に放電電流センサ30の検出電極31が設けられる。
【0112】
ここで、遮蔽部材は、遮蔽部材移動機構によって帯電器2の長手方向に沿って移動してグリッド11と感光ドラム1との間を遮蔽することにより、放電生成物を感光ドラム1に堆積させないようにするための部材である。本実施例では、この遮蔽部材に放電電流センサ30の検出電極31を設けることで、検出電極移動機構を上記遮蔽部材移動機構で兼ねようとするものである。以下、更に詳しく説明する。
【0113】
図15は、本実施例の画像形成装置100の帯電器2の周囲を側方から見た様子を示す。本実施例では、画像形成装置100は、所望のタイミングで帯電器2と感光ドラム1との間に配置される、可動式の遮蔽部材(シャッター)71と、この遮蔽部材71を移動させるための遮蔽部材移動手段としての遮蔽部材移動機構72と、を有する遮蔽装置70を有する。遮蔽装置70は、画像形成装置100の長期停止時などに帯電器2から感光ドラム1上へ放電生成物などの異物が落下するのを防止する。
【0114】
本実施例では、遮蔽部材71は、帯電器2の長手方向の一方の端部側から帯電器2と感光ドラム1との間に挿入される、ロール状に巻くことが可能なシート状の部材で構成される。遮蔽部材71は、帯電器2の長手方向の一方の端部側から帯電器2と感光ドラム1との間に挿入して遮蔽状態とする。遮蔽状態は、帯電器2の開口部12aの全体が遮蔽部材で遮蔽された状態であり、遮蔽部材71を移動させて帯電器2の開口部12aを閉じる動作は、この遮蔽状態になったとき完了する。画像形成動作中は、遮蔽部材71は、帯電器2の当該端部側にロール形状に巻き取ることで退避状態とする。退避状態は、帯電器2の開口部12aと感光ドラム1との間に遮蔽部材が無い状態であり、遮蔽部材71を移動させて帯電器2の開口部12aを開く動作は、この退避状態になったとき完了する。
【0115】
このように、遮蔽部材71は、退避状態と遮蔽状態とに移動可能なシート状部材である。退避状態では、遮蔽部材71は、感光ドラム1の長手方向の第1の端部側(帯電器2の手前側)に巻き取られて、感光ドラム1と帯電器2との間を開放する。又、遮蔽状態では、遮蔽部材71は、感光ドラム1の長手方向の第2の端部側へと引き出されて、感光ドラム1と帯電器2との間を遮蔽する。
【0116】
遮蔽部材71の一端は、遮蔽部材移動機構72の遮蔽部材支持部材75に接合されている。又、遮蔽部材71の他方の端部は、遮蔽部材71を巻き取る方向に付勢されている遮蔽部材巻き取り手段としての巻き取り芯76に接合されている。
【0117】
本実施例では、遮蔽部材移動機構72は、実施例1における検出電極移動機構40と概略同様の構成を有する。即ち、図15に示すように、遮蔽部材移動機構72は、駆動軸としてのスクリュー軸73と、スクリュー軸73を回転駆動する駆動源としてのモータ74と、遮蔽部材支持部材75と、を有して構成される。スクリュー軸73は、その長手方向が帯電器2の長手方向と略平行となるように配置されており、らせん状の溝がその長手方向にわたって周面に形成されている。本実施例では、スクリュー軸73は、ブロック17、17に回転可能に支持されている。このらせん状の溝が、遮蔽部材支持部材75に設けられた駆動係合部75aに螺合している。従って、モータ74によりスクリュー軸73が正転することにより遮蔽部材支持部材75は一方向に移動し、又モータ74によりスクリュー軸73が逆転することにより遮蔽部材支持部材75は逆方向に移動する。このように、遮蔽部材支持部材75が往復移動することによって、遮蔽部材71は、退避状態と遮蔽状態とに移動する。又、このように、遮蔽部材支持部材75が往復移動することによって、後述するように、遮蔽部材支持部材75側の端部の近傍の遮蔽部材71上に保持された、放電電流センサ30の検出電極31による放電電流の検出動作を実行することができる。
【0118】
尚、本実施例では、少なくとも帯電器2の長手方向における放電電流分布を検出する際には、遮蔽部材移動機構72は、遮蔽部材71(及び検出電極31)を、帯電器2の長手方向に沿って約56mm/secにて移動させる。検出電極31の移動速度は、帯電器2の長手方向における放電電流分布を検出できる範囲であれば、本実施例の移動速度に限定されるものではない。本実施例では、本実施例の構成において最も良好な感度が得られる検出電極31の移動速度を適用した。
【0119】
本実施例では、遮蔽部材支持部材75は、遮蔽部材71の一端部を感光ドラム1の曲率と同じ曲率を持って円弧状に保持する。そのため、当該一端部が当該円弧形状に変形された状態で引き延ばされることで、遮蔽部材71はその全体が当該円弧形状に変形される。これにより、実施例1と同様に、検出電極31は、感光ドラム1の曲率と同じ曲率をもってグリッド11と感光ドラム1との間に配置される。そのため、グリッド11と感光ドラム1との間における空間電流分布を感光ドラム1上に流入する電流分布とほぼ同じ状態で検出すること可能なように構成されている。
【0120】
尚、シート形状の遮蔽部材71をロール状に巻き取る構成とすることで、遮蔽部材71の退避時のスペースを小さくすることができる。
【0121】
本実施例では、遮蔽部材71は、ポリイミドで形成された絶縁性のシート部材である。本実施例では、遮蔽部材71の厚さは30μmである。尚、遮蔽部材71として、本実施例の樹脂シート以外に、例えば万が一感光ドラム1に接触した場合により感光ドラム1を損傷させ難い不織布などを用いても良い。
【0122】
そして、本実施例では、この遮蔽部材71のグリッド11側の面に、放電電流センサ30の検出電極31が設けられている。図16は、遮蔽部材71が帯電器2の開口部12aを覆っている状態を模式的に示す。本実施例の検出電極31は、実施例1における検出電極31の基部32の代わりに、遮蔽部材71の表面に第1、第2、第3の電極部33、34、35を設けたことを除いて、実質的に実施例1における検出電極31と同じである。即ち、本実施例では、電気的に接地された第1、第2、第3の電極部33、34、35を、電気的な非接地領域を形成する遮蔽部材71上に接着させたものであり、第1の電極部33が主検出領域となる。
【0123】
放電電流の検出時には、上述の遮蔽部材移動機構72により遮蔽部材71を帯電器2の長手方向に沿って移動させる。このとき、実施例1と同様に、検出回路36において、第1の電極部33は電気抵抗37を介して電気的に接地され、第1の電極部33に流入した電流は電気抵抗37の両端間に電気的に接続された電圧測定回路38により電圧値に変換されて測定される。電圧測定回路38の測定結果とされる検出回路36の検出結果は、画像形成装置100の制御装置50に入力され、この制御装置50に設けられた記憶部52に記憶される。このように、実施例1と同様、帯電器2の長手方向における放電電流分布は、検出電圧分布に変換されて記録される。
【0124】
図17は、本実施例の画像形成装置100の制御系を示す。
【0125】
本実施例の画像形成装置100の制御態様は、実施例1のものと同様である。本実施例では、制御装置50が検出電極移動機構40を制御する代わりに、遮蔽部材移動機構72を制御するようになっていることが異なる。
【0126】
又、本実施例における露光量制御は、図8を参照して説明した実施例1における制御と同様である。本実施例では、検出電極31が検出電極移動機構40によって移動させられる代わりに、検出電極31が遮蔽部材移動機構72によって移動させられることが異なる。
【0127】
図18、図19は、本実施例における露光量制御における画像形成装置100のシーケンス制御のタイミングチャートを示す。図18、図19に示す本実施例における露光量制御における画像形成装置100のシーケンス制御は、それぞれ図9、図10を参照して説明した実施例1のものと同様である。本実施例では、検出電極31が検出電極移動機構40によって移動させられる代わりに、検出電極31が遮蔽部材移動機構72によって移動させられることが異なる。
【0128】
このように、本実施例では、画像形成装置100は、感光ドラム1とグリッド11との間に配置されて感光ドラム1に対してグリッド11を遮蔽する遮蔽部材71と、遮蔽部材71を感光ドラム1の回転軸線方向に沿って移動させる遮蔽部材移動機構72と、を有する。そして、検出電極31は遮蔽部材上に設けられ、遮蔽部材移動機構72が検出電極31の移動手段を兼ねる。
【0129】
以上、本実施例によれば、実施例1と同様の効果を奏しうると共に、帯電器2の開口部12aを遮蔽する移動可能な遮蔽部材71が設けられる場合に、これに放電電流センサ30の検出電極31を設けることで、構成の簡易化を図ることができる。
【0130】
実施例3
次に、本発明の他の実施例について説明する。本実施例の画像形成装置の基本的な構成及び動作は実施例1のものと同じである。従って、実施例1のものと同一又はそれに相当する機能、構成を有する要素には同一符号を付して詳しい説明は省略する。
【0131】
本実施例は、放電電流センサ30による検出結果に係る情報を操作パネル60の表示部61に表示する。
【0132】
図20は、本実施例における操作パネル60の表示部61における情報表示の一例を示す模式図である。例えば、制御装置50のCPU51は、実施例1で説明した図11に示すような検出結果から、帯電器2の長手方向における検出範囲内において初期値F(x)と現在値G(x)とに所定値以上の差がある箇所を求めることができる。そして、CPU51は、図20に示すように当該箇所に対応するグリッド11の位置を操作パネル60の表示部61にて表示するなどして、帯電器2の長手方向における放電電流分布に影響する現在の帯電器2、特に、グリッド11の状態について表示することが可能である。
【0133】
又、操作パネル60の操作部62に、放電電流センサ30による帯電器2の長手方向における放電電流分布の検出動作を強制的(任意)に開始させる検出動作強制実行手段としての操作キーなどを設けてもよい。操作者が帯電器2の長手方向における放電電流分布に影響する現在の帯電器2の状態を知りたい場合、この操作キーによりCPU51に指示し、帯電器2の長手方向における放電電流分布の検出動作を実行させる。これにより、例えば図20に示すようにして現在の帯電器2の状態を操作パネル60の表示部61にて表示することが可能である。
【0134】
更に、操作パネル60の操作部62に、清掃部材による帯電器2の清掃を強制的(任意)に開始させる清掃動作強制実行手段としての操作キーなどを設けてもよい。これにより、例えば上述のように帯電器2の局所的な汚れを知った操作者が、清掃部材による帯電器2の清掃動作を強制的(任意)に実行させることができる。
【0135】
本実施例によれば、操作者に帯電器2の長手方向における放電電流分布に影響する現在の帯電器2の状態を知らせることができ、例えばグリッド11の交換時期が近いことなどを操作者に知らせることができる。その結果、サービスパーツなどを事前に補充或いは注文することが可能となり、画像形成装置100のダウンタイム(画像を出力できない期間)を低減することができる。又、清掃部材による帯電器2の清掃動作を操作者が任意に実行することを可能とすることができる。
【0136】
実施例4
次に、本発明の他の実施例について説明する。本実施例では、画像形成装置の基本的な構成及び動作自体は、上記いずれかの実施例のものと同じであってよい。
【0137】
本実施例では、画像形成装置が情報処理装置を介してホストコンピュータと双方向通信可能に通信媒体により接続されている状況下で、放電電流センサ30による検出結果を情報処理装置或いはホストコンピュータに転送して該検出結果を共有する。
【0138】
図21に示すように、本実施例では、画像形成装置とその他の情報機器とが、ネットワークを中心に各々の機器の間で相互通信可能とされている。図22は、図21のそれぞれの機器の概略構成を示すブロック図である。図23及び図24は、図21のそれぞれ機器のサーバホストコンピュータに対する分配情報図である。
【0139】
図22に示すように、サーバ(情報処理装置)N2は、主な構成要素として、CPU110、受信部111、送信部112、記憶部113を備えている。CPU110は、受信されたデータを円滑に分配処理し、データに応じた処理を実行する。例えば、データ受信時における時刻管理や、詳細設定の確認、データ送信相手先の指定や、背反する事項が成立した場合のエラー処理等を実行する。受信部111は、サーバ(情報処理装置)N2内に格納されているモデム等を利用し、ネットワーク122を介して送信されてきた情報を受け取る場所である。送信部112はサーバ(情報処理装置)N2内に格納されているモデムを利用し、ネットワーク122を介して送信されてきた情報を指定されたホストコンピュータN3に送信するための場所である。又、送信されてきた情報に誤りがある場合、相手先に再送信するための場所でもある。記憶部113は、ハードディスク等の不揮発性メモリであり、各ホストコンピュータN3からの画像データを受信した際に格納する。又、画像形成装置N1内におけるデータ情報、例えばコピー枚数、ジョブ情報、現在の状態、本実施例では放電電流センサ30による検知結果等を受信した際に格納する。
【0140】
又、図22に示すように、ホストコンピュータN3は、ネットワーク通信部114、CPU115、印刷ジョブ生成部116を備えている。ネットワーク通信部114は、ホストコンピュータ3内のモデムを介して画像形成装置N1とサーバ(情報処理装置)N2との双方向通信を行うためのものである。CPU115は、プログラムによって様々な数値計算や情報処理、機器制御等を行う。通常は組込みソフトウェアを動作させるための演算器、周辺回路、命令や情報を格納するメモリから構成されるハードウェアであるプロセッサにより実現する。印刷ジョブ生成部116は、ホストコンピュータ3内におけるハードディスク等の不揮発性メモリ内に格納されている。
【0141】
又、図22に示すように、画像形成装置N1は、主な構成要素として、印刷部118、CPU119、操作部120、記憶部121を備えている。印刷部118は画像形成装置N1における基本構成から成る部分であり、得られた画像データに基づいて転写材に画像を印刷する。例えば、画像形成装置N1は複写機である。CPU119は、必要なプログラムを読み出して、コピー動作等のタイミングを取りながら統一的に制御して、円滑なコピー動作を実行させる。又、サーバとの通信処理に関するプログラム等を格納している。操作部120はユーザーからのコピー枚数等の入力を受けるテンキー、コピー開始の指示を受け付けるコピースタートキー及び低電力解除の指示を受け付ける解除キー等を備えている。これらが押下されるとその旨をCPU119に知らせ、適切な処理動作を実行する。本実施例では、放電電流センサ30による検出結果を表示する際にも使用される。記憶部121は、ハードディスク等の不揮発性メモリであり、各ホストコンピュータ、或いは複写機本体の原稿読取装置などからの画像データ、又本実施例では放電電流センサ30による検出結果を格納する。
【0142】
図23は、サーバ(N2)を介してホストコンピュータ(N3)に対して情報を送信する際の分配情報図である。例えば、ホストコンピュータ1(N3)のCPU(115)が現在の情報を収集するために、サーバ(N2)のCPU(110)に対して情報依頼を送信する(P1)。依頼を受信したサーバ(N2)のCPU(110)は、指定の画像形成装置1(N1)のCPU(119)に対して情報を送信(P2)すると共に、画像形成装置1(N1)の状態を検出する(P3)。画像形成装置1(N1)のCPU(119)は、現在の状態、本実施例では放電電流センサ30による検出結果をサーバ(N2)に対して送信(P4)する。サーバ(N2)のCPU(110)は、受信された結果に対して処理を行い、要求された結果をホストコンピュータ1(N3)のCPU(115)に送信する(P5)。その結果、ホストコンピュータ(N3)のCPU(115)は、要求された情報を逐次収集可能となる。
【0143】
図24は、図23に対してサーバ(N2)のCPU(110)を介さずに現在の情報を受信する際の分配情報図である。例えば、ホストコンピュータ1(N3)のCPU(115)が現在の情報を収集するために、指定の画像形成装置1(N1)のCPU(119)の状態を検出する(P1)命令を送信する。画像形成装置1(N1)は現在の状態、本実施例では放電電流センサ30による検出結果を指定のホストコンピュータ1(N3)のCPU(115)に対して送信(P4)する。
【0144】
例えば、図23において、ホストコンピュータ1(N3)のCPU(115)が現在の帯電器2の状態を知りたい場合にサーバ(N2)のCPU(110)に情報依頼ジョブを送信する(P1)。受信したサーバ(N2)のCPU(110)は指定の画像形成装置1(N1)に対して放電電流センサ30による帯電器2の長手方向における放電電流分布の検知動作を実行するための命令ジョブを送信する。受信した画像形成装置1(N1)は、放電電流センサ30による帯電器2の長手方向における放電電流分布の検知動作を実行し、検知終了後、結果をサーバ(N2)に転送する。受信したサーバ(N2)のCPU110は、要求元のホストコンピュータ1(N3)に対して結果を送信することにより、操作者は検知結果を知ることができる。
【0145】
図24に示すように、サーバN3を介さずに直接指定の画像形成装置N1に対して情報依頼を実行してもよい。
【0146】
本実施例によれば、ネットワークを介した遠隔のメンテナンスサービスが可能となり、サービスパーツなどを事前に補充するなど、より無駄のないメンテナンスが可能となる。
【符号の説明】
【0147】
1 感光ドラム
2 帯電器(コロナ帯電器)
3 露光装置
10 放電ワイヤ
11 グリッド
12 シールド
15 グリッド清掃部材
20 清掃部材移動機構
30 放電電流センサ
31 検出電極
40 検出電極移動機構
50 制御装置
51 CPU
52 記憶部
71 遮蔽部材
72 遮蔽部材移動機構
【特許請求の範囲】
【請求項1】
回転可能な感光体と、前記感光体に対して放電を行う放電電極及び前記感光体との対向部に配置され前記感光体上の電位を制御する制御電極を備え前記感光体を帯電させる帯電器と、前記帯電器によって帯電させられた前記感光体を露光して静電潜像を形成する露光手段と、を有する画像形成装置において、
前記感光体と前記帯電器との間に配置される検出部材により前記制御電極を通過した後の前記帯電器からの放電電流を検出する放電電流検出手段と、
前記検出部材を前記感光体の回転軸線方向に沿って移動させる移動手段と、
前記帯電器が放電を行っている間に前記移動手段により前記検出部材を移動させて前記放電電流検出手段によって前記帯電器からの放電電流を検出し、前記感光体の回転軸線方向に沿う方向における前記制御電極を通過した後の前記帯電器からの放電電流分布を取得する取得手段と、
前記取得手段により取得された2つの前記放電電流分布を比較する比較手段と、
前記比較手段による比較の結果、2つの前記放電電流分布の間で前記放電電流に所定量以上の差があると判断した領域については、対応する前記感光体の回転軸線方向の位置を露光する際の画像濃度信号に対する前記露光装置の露光量を補正する補正手段と、
を有することを特徴とする画像形成装置。
【請求項2】
前記感光体と前記制御電極との間に配置されて前記感光体に対して前記制御電極を遮蔽する遮蔽部材と、前記遮蔽部材を前記感光体の回転軸線方向に沿って移動させる遮蔽部材移動手段と、を有し、前記検出部材は前記遮蔽部材上に設けられ、前記遮蔽部材移動手段が前記移動手段を兼ねることを特徴とする請求項1に記載の画像形成装置。
【請求項3】
前記補正手段は、前記差があると判断した領域については、対応する前記感光体の回転軸線方向の位置を画像濃度信号に応じて前記露光装置で露光した後の前記感光体の電位が、2つの前記放電電流分布のうち基準となる前記放電電流分布が取得された際の状態の前記帯電器で帯電させた前記感光体を同画像濃度信号に応じて前記露光装置で露光した後の前記感光体の電位に近づくように、画像濃度信号に対する前記露光装置の露光量を補正することを特徴とする請求項1又は2に記載の画像形成装置。
【請求項4】
前記放電電流分布の測定は、所定の画像形成枚数毎又は前記帯電器による前記感光体の所定の帯電時間毎に実行されることを特徴とする請求項1〜3のいずれか一項に記載の画像形成装置。
【請求項1】
回転可能な感光体と、前記感光体に対して放電を行う放電電極及び前記感光体との対向部に配置され前記感光体上の電位を制御する制御電極を備え前記感光体を帯電させる帯電器と、前記帯電器によって帯電させられた前記感光体を露光して静電潜像を形成する露光手段と、を有する画像形成装置において、
前記感光体と前記帯電器との間に配置される検出部材により前記制御電極を通過した後の前記帯電器からの放電電流を検出する放電電流検出手段と、
前記検出部材を前記感光体の回転軸線方向に沿って移動させる移動手段と、
前記帯電器が放電を行っている間に前記移動手段により前記検出部材を移動させて前記放電電流検出手段によって前記帯電器からの放電電流を検出し、前記感光体の回転軸線方向に沿う方向における前記制御電極を通過した後の前記帯電器からの放電電流分布を取得する取得手段と、
前記取得手段により取得された2つの前記放電電流分布を比較する比較手段と、
前記比較手段による比較の結果、2つの前記放電電流分布の間で前記放電電流に所定量以上の差があると判断した領域については、対応する前記感光体の回転軸線方向の位置を露光する際の画像濃度信号に対する前記露光装置の露光量を補正する補正手段と、
を有することを特徴とする画像形成装置。
【請求項2】
前記感光体と前記制御電極との間に配置されて前記感光体に対して前記制御電極を遮蔽する遮蔽部材と、前記遮蔽部材を前記感光体の回転軸線方向に沿って移動させる遮蔽部材移動手段と、を有し、前記検出部材は前記遮蔽部材上に設けられ、前記遮蔽部材移動手段が前記移動手段を兼ねることを特徴とする請求項1に記載の画像形成装置。
【請求項3】
前記補正手段は、前記差があると判断した領域については、対応する前記感光体の回転軸線方向の位置を画像濃度信号に応じて前記露光装置で露光した後の前記感光体の電位が、2つの前記放電電流分布のうち基準となる前記放電電流分布が取得された際の状態の前記帯電器で帯電させた前記感光体を同画像濃度信号に応じて前記露光装置で露光した後の前記感光体の電位に近づくように、画像濃度信号に対する前記露光装置の露光量を補正することを特徴とする請求項1又は2に記載の画像形成装置。
【請求項4】
前記放電電流分布の測定は、所定の画像形成枚数毎又は前記帯電器による前記感光体の所定の帯電時間毎に実行されることを特徴とする請求項1〜3のいずれか一項に記載の画像形成装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図23】
【図24】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図23】
【図24】
【公開番号】特開2013−37154(P2013−37154A)
【公開日】平成25年2月21日(2013.2.21)
【国際特許分類】
【出願番号】特願2011−172421(P2011−172421)
【出願日】平成23年8月5日(2011.8.5)
【出願人】(000001007)キヤノン株式会社 (59,756)
【Fターム(参考)】
【公開日】平成25年2月21日(2013.2.21)
【国際特許分類】
【出願日】平成23年8月5日(2011.8.5)
【出願人】(000001007)キヤノン株式会社 (59,756)
【Fターム(参考)】
[ Back to top ]