
画像形成装置
【課題】異なる長さの発光素子アレイをLEDヘッドに取り付ける場合であっても、位置ずれ補正を適切に行うことができる画像形成装置を提供する。
【解決手段】画像形成装置は、発光素子アレイ9K〜9Yと、発光素子アレイ9K〜9Yの装置躯体への取り付け角度を調整する角度調整のための機構とを備え、印刷スキューずれ、及び前記発光素子アレイ9K〜9Yの主走査倍率ずれを算出し、この算出した補正量に基づいて発光素子アレイ9K〜9Yの取り付け角度を調整し、この角度の調整後に、前記印刷スキューずれを補正する。
【解決手段】画像形成装置は、発光素子アレイ9K〜9Yと、発光素子アレイ9K〜9Yの装置躯体への取り付け角度を調整する角度調整のための機構とを備え、印刷スキューずれ、及び前記発光素子アレイ9K〜9Yの主走査倍率ずれを算出し、この算出した補正量に基づいて発光素子アレイ9K〜9Yの取り付け角度を調整し、この角度の調整後に、前記印刷スキューずれを補正する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、複数色の画像を像担持体上に重ね合わせて形成し、前記像担持体に形成された画像を紙媒体に転写して画像形成を行う際の、画像形成部による色ずれを補正することができる画像形成装置に関する。
【背景技術】
【0002】
従来、カラー画像形成装置の高速化要求が高くなったことから、感光体を含む静電潜像形成部をCMYKの4色並列に並べたタンデム方式と言われるカラー画像形成方式がカラー高速機の主流となっている。このタンデム方式では、その構成上、各色間の位置あわせ技術が重要な課題となる。
【0003】
このため、タンデム方式のカラー画像形成装置においては、転写ベルト上に、各色のトナーで所定のトナーパターンを作像し、このトナーパターンを光学式のセンサを用いて検出することで、各色間の色ずれ量を主副のレジストずれ、主走査倍率ずれ、スキューのように要因別に算出し、それぞれが一致するようにフィードバック補正することで色ずれを低減する機能をもつものが多い。
【0004】
また、この補正処理は、電源ON時、温度等の環境変化時、または一定枚数以上印刷された場合に実施することで、色ずれ量が常に一定の範囲以下になるように制御している。色ずれ量の中で、主副のレジストは感光体上のレーザ光書き出しのタイミングを調整することで、主走査倍率は画素クロックを調整することでデジタル的に補正することができる。
【0005】
走査露光を行うレーザ光のスキューについては、出力画像を画像処理で逆方向に変形させて出力することでスキューを補正する方法がある。この画像処理で補正する方法は、ラインメモリに画像の一部を蓄積し、読み出し位置を切り替えながら読み出すことで、各色間のスキューを補正するものである。この場合、補正範囲にあわせて画像処理部にラインメモリを追加するだけでよいので、メカ的な補正に比べて比較的低コストで実現できるというメリットがある。このように、画像処理でスキューを低減する方法として特許文献1が開示されている。
【発明の概要】
【発明が解決しようとする課題】
【0006】
上述のように、主走査倍率の制御においては、画素クロックを調整することによりデジタル的に処理することは可能であった。しかしながら、感光体上に設けられた各色の発光素子の長さが異なる場合は、そもそもの主走査倍率が異なるため、主走査倍率ずれの補正に必要な処理の頻度も多くなってしまい、補正にかかる負荷が過剰となってしまう。そのため、発光素子は同じ長さのものが用いられるようになされてきたが、この場合全ての発光素子の長さを揃える必要があり、保守のコストが高くなってしまうという問題があった。
【0007】
本発明は、上記に鑑みてなされたものであって、異なる長さの発光素子を用いる場合であっても、位置ずれ補正を適切に行うことができる画像形成装置を提供することにある。
【課題を解決するための手段】
【0008】
上述した課題を解決し、目的を達成するために、本発明は、各感光体に対して独立に光を照射する複数の発光素子アレイと、前記発光素子アレイの装置躯体への取り付け角度を調整する角度調整手段と、像担持体上に各色の位置ずれ補正用の補正パターンを形成するパターン形成手段と、前記像担持体上に形成された前記補正パターンを検知する検知手段と、前記検知手段によって検知された前記補正パターンに基づいて、印刷スキューずれ、及び前記発光素子アレイの主走査倍率ずれを算出する位置ずれ算出手段と、前記角度調整手段による角度の調整後に、前記位置ずれ算出手段によって検出される前記印刷スキューを補正するスキュー補正手段と、を備えることを特徴とする。
【発明の効果】
【0009】
本発明によれば、異なる長さの発光素子アレイを用いる場合であっても、位置ずれ補正を適切に行うことができるという効果を奏する。
【図面の簡単な説明】
【0010】
【図1】図1は、カラー画像形成装置の作像原理を説明するための画像形成部及び転写ベルトの正面図である。
【図2】図2は、画像形成装置の中間転写ベルト周辺の概要を示す斜視図である。
【図3】図3は、画像形成装置のブロック図である。
【図4】図4は、書込み制御部による副走査方向の書き出しタイミング補正のタイミングチャート図である。
【図5】図5は、画像形成装置内部の書込み制御部の詳細ブロック図である。
【図6−1】図6−1は、発光素子アレイの取り付け構造を示す模式図である。
【図6−2】図6−2は、発光素子アレイを傾ける稼動部の構成を示す模式図である。
【図7】図7は、位置ずれ補正用パターンの構成とスキュー量算出を示す図である。
【図8−1】図8−1は、スキュー量が補正範囲内の場合のラインメモリ格納を示す図である。
【図8−2】図8−2は、スキュー量が補正範囲を越えた場合のラインメモリ格納を示す図である。
【図9】図9は、階調数低減を実現したメモリ構成を示す図である。
【図10】図10は、ラインメモリ構成の一例を示す図である。
【図11−1】図11−1は、スキュー補正量が1ドットの場合のスキュー補正を示す図である。
【図11−2】図11−2は、スキュー補正量が3ドットの場合のスキュー補正を示す図である。
【図12】図12は、位置ずれ補正量算出のフローチャート図である。
【図13】図13は、主走査倍率ずれの補正を実行する処理のフローチャート図である。
【図14】図14は、画像形成装置のハードウェア構成を示すブロック図である。
【発明を実施するための形態】
【0011】
以下に添付図面を参照して、本発明の実施の形態におけるカラー画像形成装置の最良な実施の形態を詳細に説明する。
【0012】
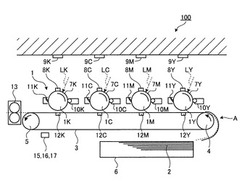
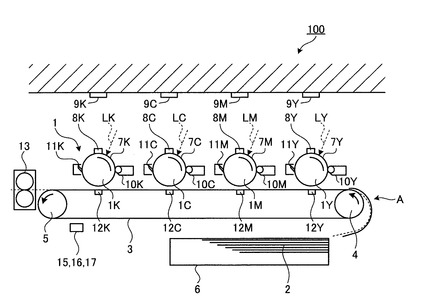
以下、実施の形態を詳細に説明する。図1は、実施の形態におけるカラーの画像形成装置の作像原理を説明するための画像形成部及び転写ベルトの正面図である。画像形成装置は、電子写真方式の画像形成による転写媒体上への画像を形成する装置である。
【0013】
以下、画像形成装置の構成と動作について説明する。図1において、画像形成装置100は、感光体7K、7M、7C、7Y上にそれぞれ静電潜像を形成した後、各々異なる色(ブラック:K、マゼンタ:M、シアン:C、イエロー:Y)のトナー像を形成する画像プロセス部(K)1K、(M)1M、(C)1C、(Y)1Yが、中間転写ベルト3に沿って一列に配置されている。
【0014】
第1の画像プロセス部(Y)1Yは、感光体7Yと、感光体7Yの周囲に配置された帯電器8Y、この感光体7Yの上方に配置された発光素子アレイ9Y、現像器10Y、及び感光体クリーニング器11Yから構成される。発光素子アレイ9Yは、LPH(LED Printer Head)として構成されており、例えばLEDなどの光源からの出射光を光学的に拡大縮小を行う光学レンズと、LEDの点灯制御を行うLD制御部(Y)109(図3参照)とが組み合わせられたモジュール構成をしている。
【0015】
感光体7Yの表面は、帯電器8Yで一様に帯電された後、発光素子アレイ9Yによりイエローの画像に対応したレーザ光LYで露光され、静電潜像が形成される。形成された静電潜像は、イエロー色トナー(不図示)を内蔵した現像器10Yで現像され、感光体7Y上にイエロー色トナー像が形成される。
【0016】
更に、第1の画像プロセス部(Y)1Yの図中左側に位置する第2の画像プロセス部(M)1M、第3の画像プロセス部(C)1C、及び第4の画像プロセス部(K)1Kにおいても、画像プロセス部(Y)1Y同様の工程で、各色の帯電器8M、8C、8Kで一様に帯電された後、各色の画像に対応したレーザ光LM、LC、LKで露光され、静電潜像が形成される。形成された静電潜像は、各色のトナー(不図示)を内蔵した現像器10M、10C、10Kで現像され、各色の感光体7M、7C、7K上にそれぞれマゼンタ色トナー像、シアン色トナー像、ブラック色トナー像が形成される。
【0017】
一方、像担持体である中間転写ベルト3は、駆動回転するベルト駆動ローラ4と従動回転する従動ローラ5との間に架設されており、駆動ローラ4の回転によって図1中の矢印方向に回転駆動される。この架設駆動により、感光体7Y上に形成されたイエロー色トナー像が転写器(Y)12Yによって中間転写ベルト3に一次転写された後、その上に感光体7M上に形成されたマゼンタ色トナー像、感光体7C上に形成されたシアン色トナー像、感光体7K上に形成されたブラック色トナー像と順次、画像の同期を制御しながら各色の転写器(M)12M、(C)12C、(K)12Kによって中間転写ベルト3に一次転写される。このように、中間転写ベルト3上には、中間転写ベルト3上の下からYMCKと積層した4色トナー像が形成される。
【0018】
一方、給紙トレイ6内の最上位置にある転写紙2は、中間転写ベルト3と接する二次転写位置A部に搬送された後、中間転写ベルト3から4色トナー像を転写される。4色トナー像を形成された転写紙2は、中間転写ベルト3から剥離され、更に搬送された後、定着器13において加熱定着される。この後、画像形成装置100の外部へ排出される。また、中間転写ベルト3の左側下部には、L側パターン検知センサ15とR側パターン検知センサ16と中央パターン検知センサ17とが設けられており、位置ずれ補正用パターン14(図2)を検出する。
【0019】
一方、トナー像を中間転写ベルト3に転写された後の感光体7Yでは、感光体表面に残った不要なトナーが感光体クリーニング器(Y)11Yによってクリーニングされ、次の静電潜像形成に備えることとなる。また、他の感光体7M、7C、7Kにおいても同様に感光体クリーニング器(M)11M、(C)11C、(K)11Kによってクリーニングされ、次の静電潜像形成に備えることとなる。このようなタンデム型画像形成装置100の場合、プロセスカラー4色の画像の位置ずれが大きな問題となることが多い。従って、画像の位置ずれ補正が重要な課題である。
【0020】
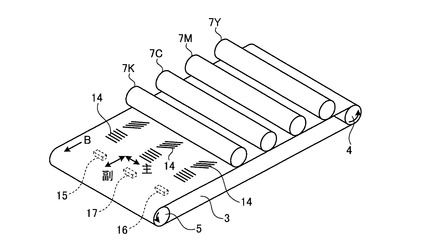
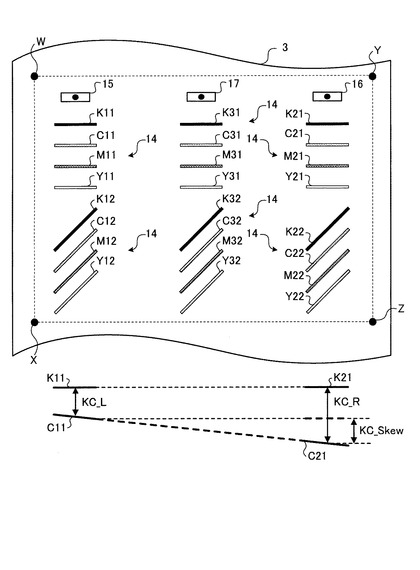
以下、中間転写ベルト上に位置ずれ補正用パターンが形成される構成を説明する。図2は、実施の形態における画像形成装置100の中間転写ベルト周辺の概要を示す斜視図である。図2において、図1と同じ要素は、同じ符号で示し、説明を省略する。図2において、位置ずれ補正用パターン14が、中間転写ベルト3上に前述の4色トナー像形成工程と同様に形成される。位置ずれ補正用パターン14は、中間転写ベルト3の駆動方向(図中矢印B)と垂直方向に3つ同じパターンを形成するように構成される。奥側に位置する位置ずれ補正用パターン14を読み取る位置の中間転写ベルト3の下側にL側パターン検知センサ15が配置される。手前側に位置する位置ずれ補正用パターン14を読み取る位置の中間転写ベルト3の下側にR側パターン検知センサ16が配置される。中央側に位置する位置ずれ補正用パターン14を読み取る位置の中間転写ベルト3の下側に中央側パターン検知センサ17が配置される。
【0021】
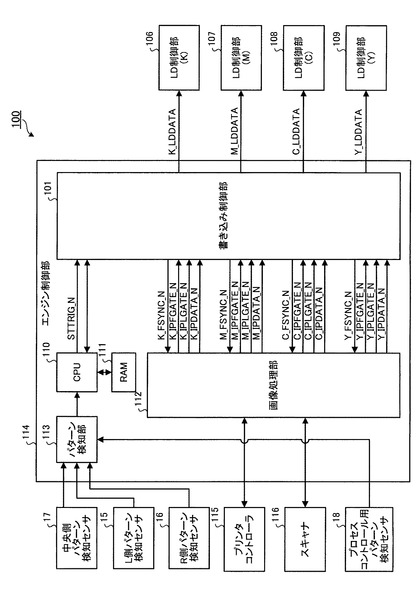
以下、画像形成装置100の制御動作に関連するブロック図を説明する。図3は、実施の形態における画像形成装置100のブロック図である。画像形成装置100は、パターン検知センサ15、16、および17、プロセスコントロール用パターン検知センサ18、プリンタコントローラ115、スキャナ116、エンジン制御部114、KMCY各色のLD制御部(K)106、(M)107、(C)108、(Y)109から構成される。
【0022】
また、エンジン制御部114は、発光素子アレイ9で感光体上に露光する画像信号を生成する部分であり、パターン検知部113、CPU110、RAM111、画像処理部112、書込み制御部101から構成される。この書込み制御部101から各色のLD制御部(K)106、(M)107、(C)108、(Y)109にそれぞれ接続される。LD制御部(K)106、(M)107、(C)108、(Y)109は、発光素子アレイ9Y〜9Kそれぞれの点灯制御を行う。
【0023】
画像処理部112は、書込み制御部101から送信された各色の副走査タイミング信号(K,M,C,Y)_FSYNC_Nを受信して、各色の主走査同期信号(K,M,C,Y)_IPLGATE_Nと副走査同期信号(K,M,C,Y)_IPFGATE_N、およびそれら同期信号に伴う画像信号(K,M,C,Y)_IPDATA_Nを書込み制御部101に送信する。更に、書込み制御部101は、それら3つの信号から画像信号(K,M,C,Y)_LDDATAを生成し、それぞれLD制御部(K)106、(M)107、(C)108、及び(Y)109に送信する。
【0024】
L側パターン検知センサ15、R側パターン検知センサ16、及び中央側パターン検知センサ17で検知された検知信号は、パターン検知部113に送信され、パターン検知部113においてアナログデータからデジタルデータへと変換され、位置ずれ量および位置ずれ量から算出される位置ずれ補正量がCPU110において算出され、RAM111に格納される。また、CPU110は、画像形成装置100内の動作制御および演算の全般を実行する。
【0025】
プロセスコントロール用パターン検知センサ18は、中間転写ベルト3上に形成した各色の検知用パターンから色の濃淡情報を取得し、この取得した情報に基づいてCPU110は、帯電、現像、転写等のプロセス条件を変更する。
【0026】
プリンタコントローラ115、またはスキャナ116から送信された画像信号は、画像処理部112にて画像処理を施される。画像処理部112は、画像データを任意のフォーマットに変換したり、γ変換などの階調変換や発光素子アレイ9Y〜9Kの特性に応じて画素データを並べ替えたりといった処理を実施する。
【0027】
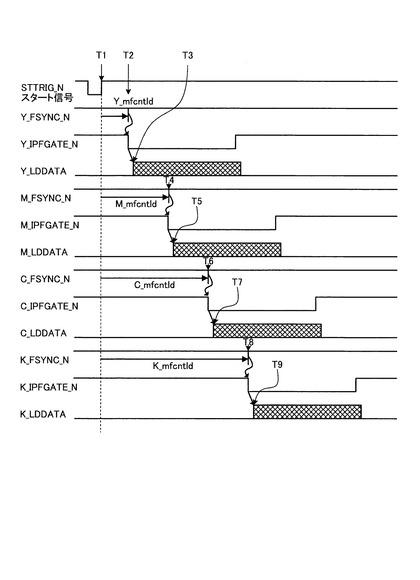
書込み制御部101は、発光素子アレイ9への露光制御を行う。図4は、実施の形態における書込み制御部101による副走査方向の書き出しタイミング補正のタイミングチャート図である。図4において、CPU110からのスタート信号STTRIG_Nを基準として、画像処理部112に対して副走査タイミング信号K_FSYNC_N、M_FSYNC_N、C_FSYNC_N、Y_FSYNC_Nを出力する(T1)。副走査タイミング信号Y_FSYNC_Nの受信をトリガにして、スタート信号からの副走査遅延量Y_mfcntldによるタイミングで画像処理部112から送信されたY色副走査同期信号Y_IPFGATE_Nを受信する(T2)。次に、画像信号Y_LDDATAをLD制御部(Y)109に送信する(T3)。M色、C色、K色に対しても同様に、副走査遅延量(M,C,K)_mfcntldによるタイミングで各色副走査同期信号(M,C,K)_IPFGATE_Nを受信後(T4、T6、T8)、画像信号(M,C,K)_LDDATAをそれぞれLD制御部(K)106、(M)107、(C)108に送信する(T5、T7、T9)。
【0028】
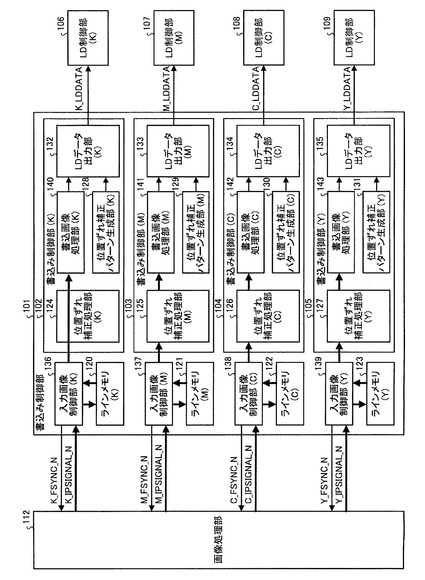
以下、書込み制御部101内部の構成について更に詳細を説明する。図5は、実施の形態における画像形成装置100内部の書込み制御部101の詳細ブロック図である。書込み制御部101の内部は、KMCY各色の入力画像制御部(K)136、(M)137、(C)138、(Y)139、KMCY各色のラインメモリ(K)120、(M)121、(C)122、(Y)123、KMCY各色の書込み制御部(K)102、(M)103、(C)104、(Y)105から構成される。
【0029】
更に、書込み制御部(K)102は、位置ずれ補正処理部(K)124、書込画像処理部(K)140、位置ずれ補正パターン生成部(K)128、LDデータ出力部(K)132から構成される。
【0030】
また、書込み制御部(M)103は、位置ずれ補正処理部(M)125、書込画像処理部(M)141、位置ずれ補正パターン生成部(M)129、LDデータ出力部(M)133から構成される。
【0031】
また、書込み制御部(C)104は、位置ずれ補正処理部(C)126、書込画像処理部(C)142、位置ずれ補正パターン生成部(C)130、LDデータ出力部(C)134から構成される。
【0032】
また、書込み制御部(Y)105は、M色と同様に、位置ずれ補正処理部(Y)127、書込画像処理部(Y)143、位置ずれ補正パターン生成部(Y)131、LDデータ出力部(Y)135から構成される。
【0033】
図5においては、説明を簡略にするため、図3で説明した各色の主走査同期信号(K,M,C,Y)_IPLGATE_Nと副走査同期信号(K,M,C,Y)_IPFGATE_Nおよびそれら同期信号に伴う画像信号(K,M,C,Y)_IPDATA_Nの3信号をあわせて書込み制御信号(K,M,C,Y)_IPSIGNAL_Nと表示している。
【0034】
図5において、書込み制御信号K_IPSIGNAL_Nは、画像処理部112から副走査タイミング信号K_FSYNC_Nの受信をトリガに入力画像制御部(K)136に送信される。入力画像制御部(K)136は、ラインメモリ(K)120に画像信号を一時記憶しながら、書込み制御部(K)102に画像信号を送信する。書込み制御部(K)102内部では、書込画像処理部(K)140が、入力画像制御部(K)136から送信された画像信号をLDデータ出力部(K)132に送信する。LDデータ出力部(K)132は、K色書込み画像信号K_LDDATAを生成しLD制御部(K)106に送信する。
【0035】
更に、M色、C色、Y色については、入力画像制御部(M)137、(C)138、(Y)139は、RAM111に記憶された位置ずれ補正量に基づいて位置ずれ量補正のためにそれぞれラインメモリ(M)121、(C)122、(Y)123に画像信号を一時記憶する。位置ずれ補正処理部(M)125、(C)126、(Y)127は、一時記憶された画像信号に位置ずれ補正量による位置ずれ量補正処理を実行した後、それぞれ書込画像処理部(M)141、(C)142、(Y)143に画像信号を送信する。K色の動作と同様に、各色の書込画像処理部から画像信号を送信された各色のLDデータ出力部は、書込み画像信号(M,C,Y)_LDDATAを生成し各色のLD制御部(M)107、(C)108、(Y)109にそれぞれ送信する。上記位置ずれ補正量については、後に詳細を説明する。
【0036】
また、位置ずれ補正用パターン14を出力する際には、位置ずれ補正パターン生成部(K)128、(M)129、(C)130、(Y)131からKMCY各色のパターン画像信号が各色のLDデータ出力部(K)132、(M)133、(C)134、(Y)135に送信される。その後は、上記における説明と同様の動作を行う。
【0037】
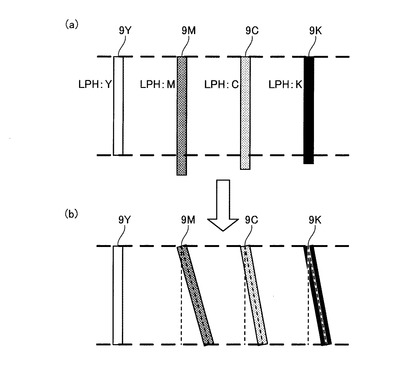
次に図6を用いて、発光素子アレイ9K〜9Yの取り付け構造について説明する。図6は、発光素子アレイ9K〜9Yが取り付けられる画像形成装置100の躯体を下方から見た模式図である。図中における上下方向が主走査方向に該当し、左右方向が副走査方向に該当する。
【0038】
図6−1(a)は、発光素子アレイ9K〜9Yをそれぞれ平行になるよう取り付けた場合を示している。発光素子アレイ9K〜9Yは、それぞれ複数個のLEDを一列に並べて構成されており、LED1点が1dotに相当する。したがって、LEDの数が異なって発光素子アレイ9K〜9Yの主走査方向の長さが異なると、その長さのバラツキがそのまま主走査倍率ずれとなる。発光素子アレイ9K〜9Y毎の主走査倍率が異なることから、印刷時に主走査倍率ずれが生じてしまう。そこで、本発明においては、発光素子アレイ9K〜9Yの取り付け角度を調整する機構が設けられている。この機構を利用することで、図6−1(b)に示されるように発光素子アレイ9K〜9Yのそれぞれの主走査倍率を同じ長さにすることができる。このとき、基準としたのはもっとも主走査長が短いY色の発光素子アレイ9Yである。
【0039】
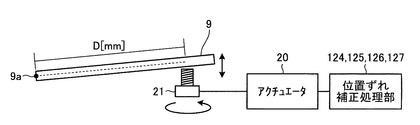
この角度を調整する機構の具体的な構成としては、例えば図6−2に示されるように、発光素子アレイ9の一端9aを固定し、この端部を支点として副走査方向に回動可能なようにする構成をとることができる。また、この回動動作は、機器のメンテナンス時に手動で行うこともできるが、アクチュエータ20と連結された稼動部21の前後動作を通じて傾斜角度を調整することもできる。このアクチュエータ20は、上述した位置ずれ補正処理部124〜127とそれぞれ接続されており、この位置ずれ補正処理部124〜127において算出された主走査倍率ずれの補正量に基づき主走査倍率を補正することができる。なお、補正の際には、K色を補正の基準にする方法や、印刷する用紙の主走査方向における長さを取得し、その長さを基準値として補正する方法などを採用することも出来る。
【0040】
以下、位置ずれ量について詳細を説明する。図7は、実施の形態における位置ずれ補正用パターンの構成とスキュー量算出を示す図である。実施の形態における画像形成装置100では、KMCY各色画像の主走査レジストずれ、副走査レジストずれおよび主走査倍率ずれおよび印刷スキューずれが位置ずれ量の要素である。主走査レジストずれおよび副走査レジストずれは、発光素子アレイ9が感光体7K、7M、7C、7Y上に静電潜像を形成する主走査方向および副走査方向の始点位置W点とX点を示す。主走査倍率ずれは、発光素子アレイ9が感光体7K、7M、7C、7Y上に静電潜像を形成する主走査方向の終点位置Y点を示す。
【0041】
すなわち、主走査レジストずれ、副走査レジストずれおよび主走査倍率ずれの三特性値が適正に補正されれば、出力画像上の先端領域W−Y間と片側端部領域W−X間の位置関係が正確に出力されることになる。算出された主走査レジストずれ、副走査レジストずれに従って、主走査遅延量、副走査遅延量が設定され、LD制御部(K)106、(M)107、(C)108、(Y)109に送信される。
【0042】
主走査倍率ずれは、上述した発光素子アレイ9K〜9Yの取り付け角度を変更することによって、補正をすることもできる。異なる長さの発光素子アレイを取り付けた場合、それぞれの主走査倍率が異なることから、このずれを補正するためには発光素子アレイ9K〜9Yの取り付け角度を調整して、主走査方向における長さを同一にする補正を行う。なお、この補正においては、もっとも短い発光素子アレイの主走査倍率を取得し、その主走査倍率に合わせるように他の発光素子アレイを傾けるようにしても良い。また、印刷する用紙サイズからその主走査方向における長さを求め、この長さと同一となるよう発光素子アレイの傾きを変更しても良い。
【0043】
このような発光素子アレイを傾ける角度を補正する場合に、傾き量ΔHを算出するためには、目標となる主走査倍率をL、主走査倍率ずれをΔLとすると、
(数1)
ΔH=√(L+ΔL)2―L2
と示すことができる。なお、このとき算出した傾き量ΔHは、後の印刷スキューずれの補正量を算出する際に用いるため、RAM111に記憶される。
【0044】
主走査倍率ずれは書込み制御部101内部で生成された画素クロック周波数によって適正に補正される。そのため、周波数を非常に細かく設定できるデバイス、例えばVCO(Voltage Controlled Oscillator)を利用したクロックジェネレータ等が使用される。
【0045】
主走査の色ずれを補正する場合、主走査倍率と主走査の書き出しタイミングを補正するが、主走査倍率補正は、検出した各色の倍率誤差量に基づく画素クロック周波数の変更を書込み制御部101にて行う。
【0046】
すなわち、主走査レジスト、副走査レジストおよび主走査倍率の三特性値が適正に補正されれば、出力画像上の先端領域W−Y間と片側端部領域W−X間の位置関係が正確に出力されることになる。算出された主走査レジスト、副走査レジストに従って、主走査遅延量、副走査遅延量が設定され、LD制御部(K)106、(M)107、(C)108、(Y)109に送信される。主走査倍率は書込み制御部101内部で生成された画素クロック周波数によって適正に補正される。そのため、周波数を非常に細かく設定できるデバイス、例えばVCO(Voltage Controlled Oscillator)を利用したクロックジェネレータ等が使用される。
【0047】
主走査の色ずれを補正する場合、主走査倍率と主走査の書き出しタイミングを補正するが、主走査倍率補正は、検出した各色の倍率誤差量に基づく画素クロック周波数の変更を書込み制御部101にて行う。
【0048】
更に、KMCY各色の画像プロセス部(K)1K、(M)1M、(C)1C、(Y)1Yから中間転写ベルト3への転写位置が異なるため、副走査方向の位置関係に誤差が生じやすい。この副走査方向の位置関係を印刷スキューずれ量と名づける。従って、印刷スキューずれ量が適正に補正されれば、上記のW点、X点、Y点に加えて、Z点も正確な位置関係となり、出力画像上の全領域の位置関係が正確に出力されることになる。
【0049】
以下、印刷スキューずれ量算出について詳細を説明する。図7において、L側パターン検知センサ15とR側パターン検知センサ16と中央パターン検知センサ17とが通過する位置(図7の左右方向、及び中央の位置)に、3群の位置ずれ補正用パターン14がそれぞれ中間転写ベルト3上に形成される。L側パターン検知センサ15が通過する位置にパターンK11、C11、M11、Y11、K12、C12、M12、Y12が形成され、R側パターン検知センサ16が通過する位置にパターンK21、C21、M21、Y21、K22、C22、M22、Y22が形成され、中央側パターン検知センサ17が通過する位置にパターンK31、C31、M31、Y31、K32、C32、M32、Y32が形成される。なお、L側は図7中左側配置を示し、R側は図7中右側配置を示す。
【0050】
L側パターン検知センサ15は、L側パターンK11とC11の位置を検出し、その位置関係からK色とC色のL側距離KC_Lを算出する。一方、R側パターン検知センサ16は、R側パターンK21とC21の位置を検出し、その位置関係からK色とC色のR側距離KC_Rを算出する。ここで、K色を基準としたC色のスキュー量KC_Skewが数2式により算出される。
(数2)
KC_Skew=KC_R−KC_L
【0051】
また、M色、Y色についても同様に、パターン検出により、以下の数3式、数4式からそれぞれスキュー量KM_Skew、KY_Skewが算出される。
(数3)
KM_Skew=KM_R−KM_L
(数4)
KY_Skew=KY_R−KY_L
【0052】
このように、数2式〜数4式により、K色を基準としたC色、M色、Y色のスキュー量KC_Skew、KM_SkewおよびKY_Skewが算出される。
【0053】
なお、2点間の検知用パターンを用いた位置ずれの算出方法ではなく、中央側パターン検知センサ17を含めた3点間で計測を行い、走査線曲がりもあわせて検出することもできる。なお、パターンK12、C12、M12、Y12、K22、C22、M22、Y22については、前述した主走査レジスト、副走査レジストおよび主走査倍率の三特性値を算出するためのパターンであり、これらパターンの検出方法および三特性値の算出方法に技術の可否が依存するところではなく、ここでは説明を省略する。
【0054】
上記のように、算出したスキュー量に応じて画像補正を実行するために、画像信号をラインメモリに格納する。ラインメモリに格納した後、印刷スキューずれ量補正を実行された画像信号が発光素子アレイ9に送信され、感光体上に書きこまれることによって、印刷スキューずれ量を補正された画像が形成される。
【0055】
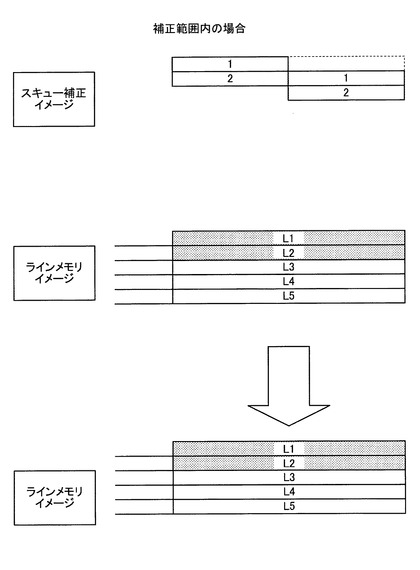
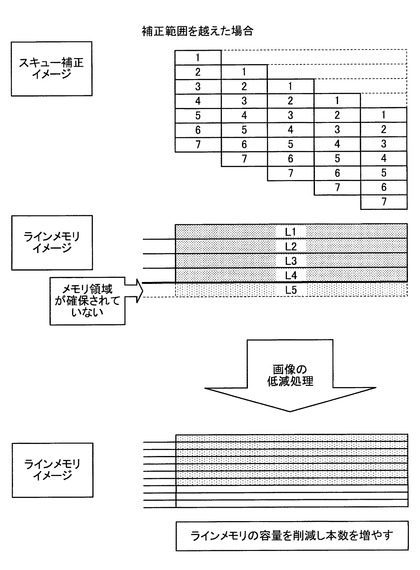
以下、印刷スキューずれ補正前のラインメモリ格納について詳細を説明する。図8-1は、実施の形態におけるスキュー補正量が補正範囲内の場合のラインメモリ格納を示す図である。更に、図8−2は、実施の形態におけるスキュー補正量が補正範囲を越えた場合のラインメモリ格納を示す図である。ここで、補正範囲は、所定のラインメモリ容量から決定されるスキュー補正可能な限界値である。したがって、上述した発光素子アレイ9Y〜9Kの角度調整を行うと副走査方向にずれが生じてしまうが、そのために必要な印刷スキューずれ補正量がこの限界値の範囲となるように角度調整を行う必要がある。補正範囲をmとすると、スキュー量を補正するために画素をずらす際に、最低1ドットラインは主走査方向に重ならせる必要がある。従って、下記の数5式によって決定される数値である。
(数5)
m=l−1[ドット](ラインメモリのライン数:l)
【0056】
数5式は、ラインメモリのライン数から補正可能なドット数を算出している。もし、ラインメモリのライン数が4ラインであれば、3ラインが補正範囲となり、出力解像度が600dpiの場合、距離に換算すると127[um]となる。
【0057】
図8−1の場合、画像補正に必要なラインメモリのライン数は2ラインとなり、スキュー補正量が補正範囲以下であるため、不足することなく従来通りラインメモリに格納される。一方、図8−2の場合、画像補正に必要なラインメモリのライン数は5ラインとなり、スキュー補正量が補正範囲を越えているため、ラインメモリ容量は不足し、必要な5ライン以上のラインメモリが確保されるように画像信号の低減処理が実行された後、ラインメモリに格納される。
【0058】
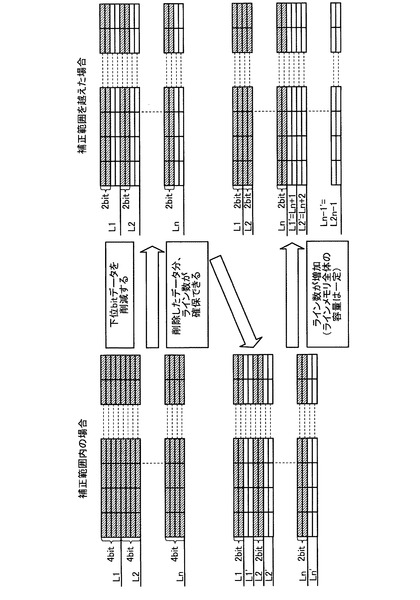
以下、画像の低減処理について詳細を説明する。図9は、実施の形態における階調数低減を実現したメモリ構成を示す図である。実施の形態においては、階調数を下げる画像の低減処理を実行することにより、ラインメモリの容量を増やすことなく、画像上の実用補正領域を広げ、結果的にスキュー量の補正領域を広げることができる。スキュー補正量が補正範囲内である場合、画像信号の階調数は4bitであるとすると、ラインメモリL1、L2、・・・Lnに4bitの画像信号が格納される。スキュー補正量が補正範囲を越えた場合、画像信号の階調数は4bitから2bitに低減され、ラインメモリL1、L2、・・・Lnに2bitの画像信号が格納される。従って、1ラインあたりのメモリ容量が半減したため、補正範囲内の場合に比べて、2倍のライン数を有するラインメモリ構成が可能となる。その結果、スキュー量の補正領域を2倍に広げることができた。
【0059】
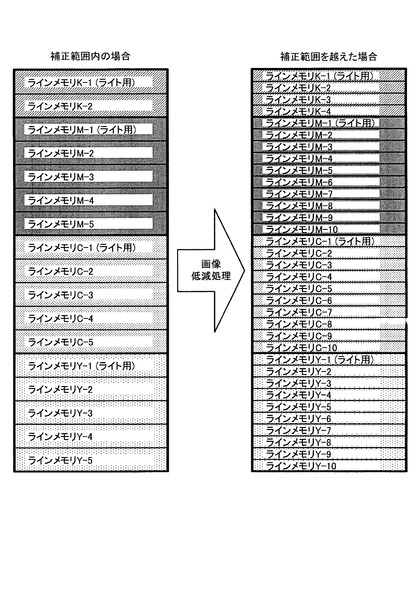
以下、ラインメモリ構成について説明する。上記のように画像の低減処理を実行された後、各色のラインメモリ(K)120、(M)121、(C)122、(Y)123に画像信号が格納される。図10は、実施の形態におけるラインメモリ構成の一例を示す図である。スキュー補正量が補正範囲内の場合、図10の左側、「補正範囲内の場合」に示すように、ラインメモリ(K)120、ラインメモリ(M)121、ラインメモリ(C)122、ラインメモリ(Y)123は、それぞれ2ライン、5ライン、5ライン、5ラインから構成される。しかし、各色のスキュー補正量が補正範囲を越えた場合、図10の右側、「補正範囲を越えた場合」に示すように、画像の低減処理が実行されたことによって、各色のラインメモリはそれぞれ2倍となり、4ライン、10ライン、10ライン、10ラインの構成に変更される。このように、画像がラインメモリに格納された後、スキュー量補正が実行される。
【0060】
以下、スキュー補正量について詳細を説明する。表1に、算出されたスキュー量の一例を示す。この際、数字の前の符号は、副走査方向のずれ方向を示し、任意に定義できるものである。本実施の形態においては、画像形成の先端側、すなわち図中上方向をプラスと定義する。
【表1】

【0061】
この場合、出力解像度を600dpiと仮定すると、600dpiの1ラインが最小補正単位となるので、スキュー量を最小補正単位で除算することにより、スキュー補正量は、表2のようになる。
【表2】
【0062】
しかし、600dpiの1ラインが最小補正単位であるため、表2に示される小数点以下は補正不能であり、四捨五入、桁上げ、もしくは桁下げ等によって整数に置き換えられる。ここでは、例として四捨五入を採用すると、最終的に、スキュー補正量は、表3のようになる。
【表3】
【0063】
表3のようなスキュー補正量は、図5のブロック図において、説明した入力画像制御部(M)137、(C)138、(Y)139によって算出され、RAM111に記憶される。
【0064】
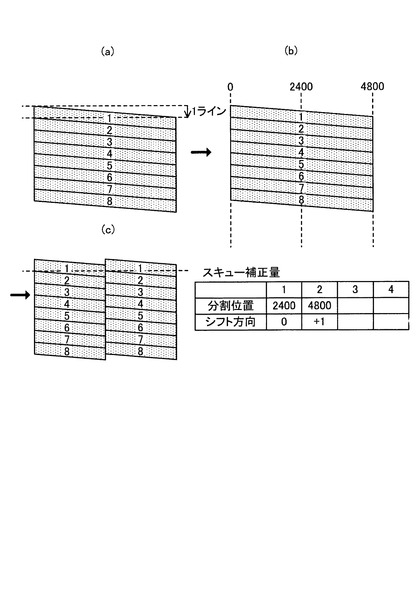
以下、上記のように算出されたスキュー補正量に対する画像補正について説明する。図11−1は、実施の形態におけるスキュー補正量が1ドットの場合のスキュー補正を示す図である。図11−1の(a)は、中間転写ベルト3上で右下がりに1ラインスキューした状態を示している。図11−1の(b)は、主走査方向に4800画素ある画像信号を主走査方向に2分割する状態を示す。この際、主走査方向の始点を左端、副走査方向のシフト方向として画像の上方向を+と定義すると、分割位置2400画素、4800画素に対して、それぞれスキュー補正量は0、+1となり、画像補正の結果、図11−1の(c)となる。図11−1の(c)は、副走査方向上側に1画素シフトしたことによって画像補正された状態を示す。
【0065】
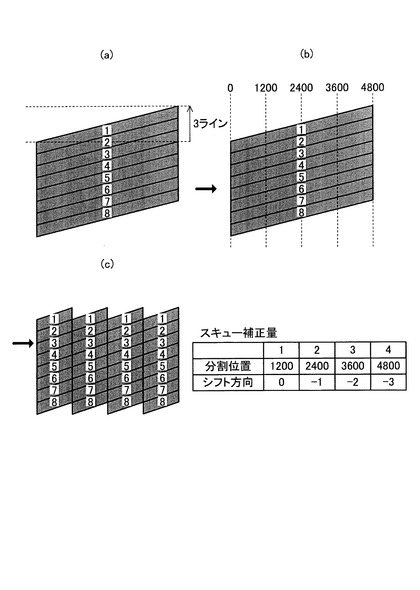
一方、図11−2は、実施の形態におけるスキュー補正量が3ドットの場合のスキュー補正を示す図である。図11−2の(a)は、中間転写ベルト3上で右上がりに3ラインスキューした状態を示している。図11−2の(b)は、主走査方向に4800画素ある画像信号を主走査方向に4分割する状態を示す。この際、分割位置1200画素、2400画素、3600画素、4800画素に対して、それぞれスキュー補正量は0、−1、−2、−3となり、画像補正の結果、図11−2の(c)となる。図11−2の(c)は、副走査方向にシフトしたことによって画像補正された状態を示す。
【0066】
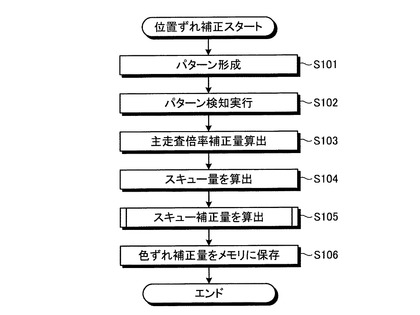
以下、パターン形成からスキュー補正量算出までの一連の動作を説明する。図12は、実施の形態における位置ずれ補正量算出のフローチャート図である。まず、位置ずれ補正用パターン14を中間転写ベルト3上に形成する(ステップS101)。L側パターン検知センサ15およびR側パターン検知センサ16によって、パターン検知が実行される(ステップS102)。KMCY各色の主走査レジスト、副走査レジストおよび主走査倍率の補正量を算出する(ステップS103)。なお、この主走査倍率の補正量としては、発光素子アレイの傾き量の算出も含まれている。次いで、K色を基準としたM、CおよびY色のスキュー量を算出する(ステップS104)。M、CおよびY色のスキュー補正量を算出する(ステップS105)。なお、ステップS105のスキュー補正量の算出の際には、パターン検知から算出された値に加え、主走査倍率ずれの補正のために調整した発光素子アレイ9Y〜9Kの傾き量ΔHの値を反映した形で算出する。算出した各色の位置ずれ補正量(主走査レジスト、副走査レジスト、主走査倍率およびスキュー量の各補正量)をRAM111に記憶する(ステップS106)。
【0067】
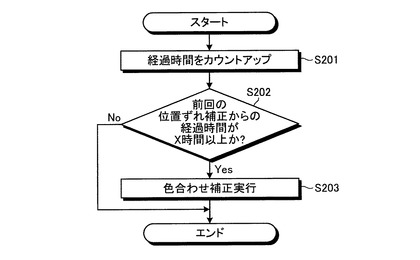
なお、色ずれ補正算出のフローチャートにおいて算出された各補正量は、通常は印刷の実行時にこの補正量に基づいて補正が実行される。しかしながら、印刷がされない場合であっても、発光素子アレイの傾き角度の調整による補正は実行可能であるため、その補正実行の処理の流れを説明する。図13は、補正実行の処理の流れを示したフローチャート図である。図13に示されるように、位置ずれ補正処理部124〜127は、内部に時間をカウントするカウンタを備えており、時間をカウントする(ステップS201)。位置ずれ補正処理部124〜127は、カウントした時間が前回の位置ずれ補正からX時間経過したか否かを判断する(ステップS202)。X時間以上経過していると判断された場合、上述の補正算出処理によって算出された主走査倍率の補正量に基づき、発光素子アレイ9K〜9Yの傾き量を調整する(ステップS203)。X時間経過していないと判断された場合は、処理を終了する。
【0068】
以上に示した、画像形成装置100においては、発光素子アレイ9K〜9Yの取り付け角度をそれぞれ変更することで、主走査倍率の補正を行うことができるようにしたため、印刷時ではなくとも、ハード的に主走査倍率の補正を行うことができる。そのため、印刷ごとにデジタル的に毎回補正の実施を行わなくても良いため、位置ずれ補正にかかる処理の負荷を軽減することができる。
【0069】
また、異なる長さの発光素子アレイ9K〜9Yを取り付けた場合であっても、主走査倍率を同一とすることができるため、長さの異なる発光素子アレイ9K〜9Yをバラバラに交換することが出来、管理やメンテナンスの煩雑さを低減することができる。
【0070】
また、自動的に発光素子アレイ9K〜9Yの傾きを調整する稼動部21を設けることとしたため、手動でメンテナンスを行う必要がなく、保守の手間を軽減することができるようになる。
【0071】
また、主走査倍率ずれの補正のために発光素子アレイ9K〜9Yを傾けるとスキューのずれが生じるが、傾けた後の印刷時にスキューを補正することとしたため、このスキューずれも解消することができる。
【0072】
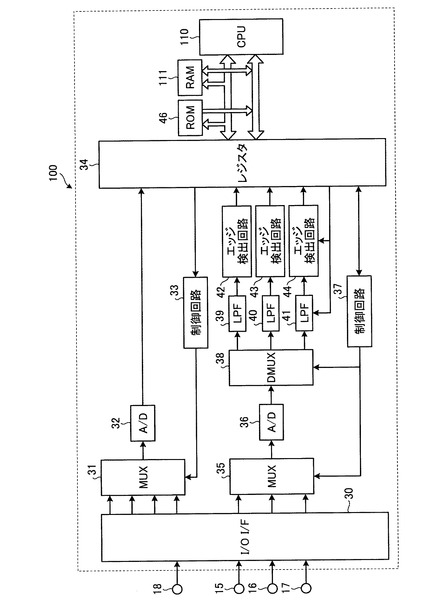
図14は、画像形成装置100のハードウェア構成例を示すブロック図である。画像形成装置100は、I/O I/F30と、マルチプレクサ31、35と、A/Dコンバータ32、36と、制御回路33、37と、レジスタ34と、デマルチプレクサ38と、LPF回路(デジタルフィルタ回路:積和演算回路)39〜41と、エッジ検出回路42〜44と、CPU110と、RAM111と、ROM46とを備えている。パターン検知用センサ15〜17や、プロセスコントロール用パターン検知センサ18からの検知信号は、I/O I/F30からマルチプレクサ31に入力される。
【0073】
制御回路33は、プロセスコントロール用パターン検知センサ18からの検知信号が入力されると、マルチプレクサ31、及びA/Dコンバータ32を検知用パターン形成中にセンサのチャンネルの選択と、A/D変換動作を行うように制御し、ここでデジタル化されたデータはレジスタ34に保存される。CPU110は、得られたデータを通じて、帯電、現像、転写等におけるプロセス管理のための設定を変更する。
【0074】
制御回路33は、マルチプレクサ31、及びA/Dコンバータ32を検知用パターン形成中にセンサのチャンネルの選択と、A/D変換動作を行うように制御し、ここでデジタル化されたデータはデマルチプレクサ38に入力される。デマルチプレクサ38は、変換されたデジタルデータをLPF回路39〜41のいずれに出力するかを選択する。LPF回路39〜41は、受信したデータの高周波成分をカットし、より正確に後段回路によりパターン位置を認識できる形に補正する。
【0075】
LPF回路39〜41の後段に位置するエッジ検出回路42〜44は、検出電圧波形を所定のスレッシュ電圧と比較することで、立下り/立ち上がりのポイントを抽出し、その中央をパターン中央位置と認識し、中央値をレジスタ34に格納する。
【0076】
CPU110は、レジスタ34に格納されたデータをROM46に格納されているプログラムに従って、プロセス条件の変更の演算、および位置ずれ補正の演算を行う。この演算結果はRAM111に記憶される。また、CPU110は、レジスタ34に記憶された各設定値を変更することで、サンプリングスタート/ストップの動作切り替え、A/D変換を行う各センサのチャンネルの切り替え、LPF回路39〜41のカットオフ周波数の変更、及びエッジ検出回路42〜44のスレッシ電圧の変更を行う。
【0077】
なお、本実施の形態の画像形成装置100で実行されるプログラムは、ROM等に予め組み込まれて提供される。本実施の形態の画像形成装置100で実行されるプログラムは、インストール可能な形式又は実行可能な形式のファイルでCD−ROM、フレキシブルディスク(FD)、CD−R、DVD(Digital Versatile Disk)等のコンピュータで読み取り可能な記録媒体に記録して提供するように構成してもよい。
【0078】
また、図12におけるステップS105では、発光素子アレイ9Y〜9Kの補正のための角度調整の値を記憶しておき、その値を印刷スキューずれの補正量を算出する際に用いることとしたが、発光素子アレイ9Y〜9Kの角度調整後に、再度パターン形成を行い、そこから印刷スキュー補正の値を演算しても良い。
【0079】
なお、上記実施の形態では、本発明の画像形成装置100を、カラー複写機に適用した例を挙げて説明するが、コピー機能、プリンタ機能、スキャナ機能およびファクシミリ機能のうち少なくとも2つの機能を有する複合機、プリンタ、スキャナ装置、ファクシミリ装置等の画像形成装置100であればいずれにも適用することができる。
【符号の説明】
【0080】
1K 画像プロセス部(K)
1M 画像プロセス部(M)
1C 画像プロセス部(C)
1Y 画像プロセス部(Y)
2 転写紙
3 中間転写ベルト
4 駆動ローラ
5 従動ローラ
6 給紙トレイ
7K 感光体(K)
7M 感光体(M)
7C 感光体(C)
7Y 感光体(Y)
8K 帯電器(K)
8M 帯電器(M)
8C 帯電器(C)
8Y 帯電器(Y)
9 発光素子アレイ
10K 現像器(K)
10M 現像器(M)
10C 現像器(C)
10Y 現像器(Y)
11K 感光体クリーニング器(K)
11M 感光体クリーニング器(M)
11C 感光体クリーニング器(C)
11Y 感光体クリーニング器(Y)
12K 転写器(K)
12M 転写器(M)
12C 転写器(C)
12Y 転写器(Y)
13 定着器
14 位置ずれ補正用パターン
15 L側パターン検知センサ
16 R側パターン検知センサ
101 書込み制御部
102 書込み制御部(K)
103 書込み制御部(M)
104 書込み制御部(C)
105 書込み制御部(Y)
106 LD制御部(K)
107 LD制御部(M)
108 LD制御部(C)
109 LD制御部(Y)
110 CPU
111 RAM
112 画像処理部
113 パターン検知部
114 エンジン制御部
115 プリンタコントローラ
116 スキャナ
120 ラインメモリ(K)
121 ラインメモリ(M)
122 ラインメモリ(C)
123 ラインメモリ(Y)
124 位置ずれ補正処理部(K)
125 位置ずれ補正処理部(M)
126 位置ずれ補正処理部(C)
127 位置ずれ補正処理部(Y)
128 位置ずれ補正パターン生成部(K)
129 位置ずれ補正パターン生成部(M)
130 位置ずれ補正パターン生成部(C)
131 位置ずれ補正パターン生成部(Y)
132 LDデータ出力部(K)
133 LDデータ出力部(M)
134 LDデータ出力部(C)
135 LDデータ出力部(Y)
136 入力画像制御部(K)
137 入力画像制御部(M)
138 入力画像制御部(C)
139 入力画像制御部(Y)
140 書込み画像処理部(K)
141 書込み画像処理部(M)
142 書込み画像処理部(C)
143 書込み画像処理部(Y)
K11、K12 L側位置ずれ補正用パターン(K)
M11、M12 L側位置ずれ補正用パターン(M)
C11、C12 L側位置ずれ補正用パターン(C)
Y11、Y12 L側位置ずれ補正用パターン(Y)
K21、K22 R側位置ずれ補正用パターン(K)
M21、M22 R側位置ずれ補正用パターン(M)
C21、C22 R側位置ずれ補正用パターン(C)
Y21、Y22 R側位置ずれ補正用パターン(Y)
KC_L L側位置ずれ量(C)
KC_R R側位置ずれ量(C)
KC_Skew スキュー量(C)
KM_L L側位置ずれ量(M)
KM_R R側位置ずれ量(M)
KM_Skew スキュー量(M)
KY_L L側位置ずれ量(Y)
KY_R R側位置ずれ量(Y)
KY_Skew スキュー量(Y)
LK レーザ光(K)
LM レーザ光(M)
LC レーザ光(C)
LY レーザ光(Y)
STTRIG_N スタート信号
K_FSYNC_N K色同期信号
M_FSYNC_N M色同期信号
C_FSYNC_N C色同期信号
Y_FSYNC_N Y色同期信号
K_FSYNC_N K色副走査タイミング信号
M_FSYNC_N M色副走査タイミング信号
C_FSYNC_N C色副走査タイミング信号
Y_FSYNC_N Y色副走査タイミング信号
K_IPFGATE_N K色副走査同期信号
M_IPFGATE_N M色副走査同期信号
C_IPFGATE_N C色副走査同期信号
Y_IPFGATE_N Y色副走査同期信号
K_IPDATA_N K色画像信号
M_IPDATA_N M色画像信号
C_IPDATA_N C色画像信号
Y_IPDATA_N Y色画像信号
K_mfcntld K色副走査遅延量
M_mfcntld M色副走査遅延量
C_mfcntld C色副走査遅延量
Y_mfcntld Y色副走査遅延量
K_LDDATA K色書込み画像信号
M_LDDATA M色書込み画像信号
C_LDDATA C色書込み画像信号
Y_LDDATA Y色書込み画像信号
【先行技術文献】
【特許文献】
【0081】
【特許文献1】特開2003−285473号公報
【技術分野】
【0001】
本発明は、複数色の画像を像担持体上に重ね合わせて形成し、前記像担持体に形成された画像を紙媒体に転写して画像形成を行う際の、画像形成部による色ずれを補正することができる画像形成装置に関する。
【背景技術】
【0002】
従来、カラー画像形成装置の高速化要求が高くなったことから、感光体を含む静電潜像形成部をCMYKの4色並列に並べたタンデム方式と言われるカラー画像形成方式がカラー高速機の主流となっている。このタンデム方式では、その構成上、各色間の位置あわせ技術が重要な課題となる。
【0003】
このため、タンデム方式のカラー画像形成装置においては、転写ベルト上に、各色のトナーで所定のトナーパターンを作像し、このトナーパターンを光学式のセンサを用いて検出することで、各色間の色ずれ量を主副のレジストずれ、主走査倍率ずれ、スキューのように要因別に算出し、それぞれが一致するようにフィードバック補正することで色ずれを低減する機能をもつものが多い。
【0004】
また、この補正処理は、電源ON時、温度等の環境変化時、または一定枚数以上印刷された場合に実施することで、色ずれ量が常に一定の範囲以下になるように制御している。色ずれ量の中で、主副のレジストは感光体上のレーザ光書き出しのタイミングを調整することで、主走査倍率は画素クロックを調整することでデジタル的に補正することができる。
【0005】
走査露光を行うレーザ光のスキューについては、出力画像を画像処理で逆方向に変形させて出力することでスキューを補正する方法がある。この画像処理で補正する方法は、ラインメモリに画像の一部を蓄積し、読み出し位置を切り替えながら読み出すことで、各色間のスキューを補正するものである。この場合、補正範囲にあわせて画像処理部にラインメモリを追加するだけでよいので、メカ的な補正に比べて比較的低コストで実現できるというメリットがある。このように、画像処理でスキューを低減する方法として特許文献1が開示されている。
【発明の概要】
【発明が解決しようとする課題】
【0006】
上述のように、主走査倍率の制御においては、画素クロックを調整することによりデジタル的に処理することは可能であった。しかしながら、感光体上に設けられた各色の発光素子の長さが異なる場合は、そもそもの主走査倍率が異なるため、主走査倍率ずれの補正に必要な処理の頻度も多くなってしまい、補正にかかる負荷が過剰となってしまう。そのため、発光素子は同じ長さのものが用いられるようになされてきたが、この場合全ての発光素子の長さを揃える必要があり、保守のコストが高くなってしまうという問題があった。
【0007】
本発明は、上記に鑑みてなされたものであって、異なる長さの発光素子を用いる場合であっても、位置ずれ補正を適切に行うことができる画像形成装置を提供することにある。
【課題を解決するための手段】
【0008】
上述した課題を解決し、目的を達成するために、本発明は、各感光体に対して独立に光を照射する複数の発光素子アレイと、前記発光素子アレイの装置躯体への取り付け角度を調整する角度調整手段と、像担持体上に各色の位置ずれ補正用の補正パターンを形成するパターン形成手段と、前記像担持体上に形成された前記補正パターンを検知する検知手段と、前記検知手段によって検知された前記補正パターンに基づいて、印刷スキューずれ、及び前記発光素子アレイの主走査倍率ずれを算出する位置ずれ算出手段と、前記角度調整手段による角度の調整後に、前記位置ずれ算出手段によって検出される前記印刷スキューを補正するスキュー補正手段と、を備えることを特徴とする。
【発明の効果】
【0009】
本発明によれば、異なる長さの発光素子アレイを用いる場合であっても、位置ずれ補正を適切に行うことができるという効果を奏する。
【図面の簡単な説明】
【0010】
【図1】図1は、カラー画像形成装置の作像原理を説明するための画像形成部及び転写ベルトの正面図である。
【図2】図2は、画像形成装置の中間転写ベルト周辺の概要を示す斜視図である。
【図3】図3は、画像形成装置のブロック図である。
【図4】図4は、書込み制御部による副走査方向の書き出しタイミング補正のタイミングチャート図である。
【図5】図5は、画像形成装置内部の書込み制御部の詳細ブロック図である。
【図6−1】図6−1は、発光素子アレイの取り付け構造を示す模式図である。
【図6−2】図6−2は、発光素子アレイを傾ける稼動部の構成を示す模式図である。
【図7】図7は、位置ずれ補正用パターンの構成とスキュー量算出を示す図である。
【図8−1】図8−1は、スキュー量が補正範囲内の場合のラインメモリ格納を示す図である。
【図8−2】図8−2は、スキュー量が補正範囲を越えた場合のラインメモリ格納を示す図である。
【図9】図9は、階調数低減を実現したメモリ構成を示す図である。
【図10】図10は、ラインメモリ構成の一例を示す図である。
【図11−1】図11−1は、スキュー補正量が1ドットの場合のスキュー補正を示す図である。
【図11−2】図11−2は、スキュー補正量が3ドットの場合のスキュー補正を示す図である。
【図12】図12は、位置ずれ補正量算出のフローチャート図である。
【図13】図13は、主走査倍率ずれの補正を実行する処理のフローチャート図である。
【図14】図14は、画像形成装置のハードウェア構成を示すブロック図である。
【発明を実施するための形態】
【0011】
以下に添付図面を参照して、本発明の実施の形態におけるカラー画像形成装置の最良な実施の形態を詳細に説明する。
【0012】
以下、実施の形態を詳細に説明する。図1は、実施の形態におけるカラーの画像形成装置の作像原理を説明するための画像形成部及び転写ベルトの正面図である。画像形成装置は、電子写真方式の画像形成による転写媒体上への画像を形成する装置である。
【0013】
以下、画像形成装置の構成と動作について説明する。図1において、画像形成装置100は、感光体7K、7M、7C、7Y上にそれぞれ静電潜像を形成した後、各々異なる色(ブラック:K、マゼンタ:M、シアン:C、イエロー:Y)のトナー像を形成する画像プロセス部(K)1K、(M)1M、(C)1C、(Y)1Yが、中間転写ベルト3に沿って一列に配置されている。
【0014】
第1の画像プロセス部(Y)1Yは、感光体7Yと、感光体7Yの周囲に配置された帯電器8Y、この感光体7Yの上方に配置された発光素子アレイ9Y、現像器10Y、及び感光体クリーニング器11Yから構成される。発光素子アレイ9Yは、LPH(LED Printer Head)として構成されており、例えばLEDなどの光源からの出射光を光学的に拡大縮小を行う光学レンズと、LEDの点灯制御を行うLD制御部(Y)109(図3参照)とが組み合わせられたモジュール構成をしている。
【0015】
感光体7Yの表面は、帯電器8Yで一様に帯電された後、発光素子アレイ9Yによりイエローの画像に対応したレーザ光LYで露光され、静電潜像が形成される。形成された静電潜像は、イエロー色トナー(不図示)を内蔵した現像器10Yで現像され、感光体7Y上にイエロー色トナー像が形成される。
【0016】
更に、第1の画像プロセス部(Y)1Yの図中左側に位置する第2の画像プロセス部(M)1M、第3の画像プロセス部(C)1C、及び第4の画像プロセス部(K)1Kにおいても、画像プロセス部(Y)1Y同様の工程で、各色の帯電器8M、8C、8Kで一様に帯電された後、各色の画像に対応したレーザ光LM、LC、LKで露光され、静電潜像が形成される。形成された静電潜像は、各色のトナー(不図示)を内蔵した現像器10M、10C、10Kで現像され、各色の感光体7M、7C、7K上にそれぞれマゼンタ色トナー像、シアン色トナー像、ブラック色トナー像が形成される。
【0017】
一方、像担持体である中間転写ベルト3は、駆動回転するベルト駆動ローラ4と従動回転する従動ローラ5との間に架設されており、駆動ローラ4の回転によって図1中の矢印方向に回転駆動される。この架設駆動により、感光体7Y上に形成されたイエロー色トナー像が転写器(Y)12Yによって中間転写ベルト3に一次転写された後、その上に感光体7M上に形成されたマゼンタ色トナー像、感光体7C上に形成されたシアン色トナー像、感光体7K上に形成されたブラック色トナー像と順次、画像の同期を制御しながら各色の転写器(M)12M、(C)12C、(K)12Kによって中間転写ベルト3に一次転写される。このように、中間転写ベルト3上には、中間転写ベルト3上の下からYMCKと積層した4色トナー像が形成される。
【0018】
一方、給紙トレイ6内の最上位置にある転写紙2は、中間転写ベルト3と接する二次転写位置A部に搬送された後、中間転写ベルト3から4色トナー像を転写される。4色トナー像を形成された転写紙2は、中間転写ベルト3から剥離され、更に搬送された後、定着器13において加熱定着される。この後、画像形成装置100の外部へ排出される。また、中間転写ベルト3の左側下部には、L側パターン検知センサ15とR側パターン検知センサ16と中央パターン検知センサ17とが設けられており、位置ずれ補正用パターン14(図2)を検出する。
【0019】
一方、トナー像を中間転写ベルト3に転写された後の感光体7Yでは、感光体表面に残った不要なトナーが感光体クリーニング器(Y)11Yによってクリーニングされ、次の静電潜像形成に備えることとなる。また、他の感光体7M、7C、7Kにおいても同様に感光体クリーニング器(M)11M、(C)11C、(K)11Kによってクリーニングされ、次の静電潜像形成に備えることとなる。このようなタンデム型画像形成装置100の場合、プロセスカラー4色の画像の位置ずれが大きな問題となることが多い。従って、画像の位置ずれ補正が重要な課題である。
【0020】
以下、中間転写ベルト上に位置ずれ補正用パターンが形成される構成を説明する。図2は、実施の形態における画像形成装置100の中間転写ベルト周辺の概要を示す斜視図である。図2において、図1と同じ要素は、同じ符号で示し、説明を省略する。図2において、位置ずれ補正用パターン14が、中間転写ベルト3上に前述の4色トナー像形成工程と同様に形成される。位置ずれ補正用パターン14は、中間転写ベルト3の駆動方向(図中矢印B)と垂直方向に3つ同じパターンを形成するように構成される。奥側に位置する位置ずれ補正用パターン14を読み取る位置の中間転写ベルト3の下側にL側パターン検知センサ15が配置される。手前側に位置する位置ずれ補正用パターン14を読み取る位置の中間転写ベルト3の下側にR側パターン検知センサ16が配置される。中央側に位置する位置ずれ補正用パターン14を読み取る位置の中間転写ベルト3の下側に中央側パターン検知センサ17が配置される。
【0021】
以下、画像形成装置100の制御動作に関連するブロック図を説明する。図3は、実施の形態における画像形成装置100のブロック図である。画像形成装置100は、パターン検知センサ15、16、および17、プロセスコントロール用パターン検知センサ18、プリンタコントローラ115、スキャナ116、エンジン制御部114、KMCY各色のLD制御部(K)106、(M)107、(C)108、(Y)109から構成される。
【0022】
また、エンジン制御部114は、発光素子アレイ9で感光体上に露光する画像信号を生成する部分であり、パターン検知部113、CPU110、RAM111、画像処理部112、書込み制御部101から構成される。この書込み制御部101から各色のLD制御部(K)106、(M)107、(C)108、(Y)109にそれぞれ接続される。LD制御部(K)106、(M)107、(C)108、(Y)109は、発光素子アレイ9Y〜9Kそれぞれの点灯制御を行う。
【0023】
画像処理部112は、書込み制御部101から送信された各色の副走査タイミング信号(K,M,C,Y)_FSYNC_Nを受信して、各色の主走査同期信号(K,M,C,Y)_IPLGATE_Nと副走査同期信号(K,M,C,Y)_IPFGATE_N、およびそれら同期信号に伴う画像信号(K,M,C,Y)_IPDATA_Nを書込み制御部101に送信する。更に、書込み制御部101は、それら3つの信号から画像信号(K,M,C,Y)_LDDATAを生成し、それぞれLD制御部(K)106、(M)107、(C)108、及び(Y)109に送信する。
【0024】
L側パターン検知センサ15、R側パターン検知センサ16、及び中央側パターン検知センサ17で検知された検知信号は、パターン検知部113に送信され、パターン検知部113においてアナログデータからデジタルデータへと変換され、位置ずれ量および位置ずれ量から算出される位置ずれ補正量がCPU110において算出され、RAM111に格納される。また、CPU110は、画像形成装置100内の動作制御および演算の全般を実行する。
【0025】
プロセスコントロール用パターン検知センサ18は、中間転写ベルト3上に形成した各色の検知用パターンから色の濃淡情報を取得し、この取得した情報に基づいてCPU110は、帯電、現像、転写等のプロセス条件を変更する。
【0026】
プリンタコントローラ115、またはスキャナ116から送信された画像信号は、画像処理部112にて画像処理を施される。画像処理部112は、画像データを任意のフォーマットに変換したり、γ変換などの階調変換や発光素子アレイ9Y〜9Kの特性に応じて画素データを並べ替えたりといった処理を実施する。
【0027】
書込み制御部101は、発光素子アレイ9への露光制御を行う。図4は、実施の形態における書込み制御部101による副走査方向の書き出しタイミング補正のタイミングチャート図である。図4において、CPU110からのスタート信号STTRIG_Nを基準として、画像処理部112に対して副走査タイミング信号K_FSYNC_N、M_FSYNC_N、C_FSYNC_N、Y_FSYNC_Nを出力する(T1)。副走査タイミング信号Y_FSYNC_Nの受信をトリガにして、スタート信号からの副走査遅延量Y_mfcntldによるタイミングで画像処理部112から送信されたY色副走査同期信号Y_IPFGATE_Nを受信する(T2)。次に、画像信号Y_LDDATAをLD制御部(Y)109に送信する(T3)。M色、C色、K色に対しても同様に、副走査遅延量(M,C,K)_mfcntldによるタイミングで各色副走査同期信号(M,C,K)_IPFGATE_Nを受信後(T4、T6、T8)、画像信号(M,C,K)_LDDATAをそれぞれLD制御部(K)106、(M)107、(C)108に送信する(T5、T7、T9)。
【0028】
以下、書込み制御部101内部の構成について更に詳細を説明する。図5は、実施の形態における画像形成装置100内部の書込み制御部101の詳細ブロック図である。書込み制御部101の内部は、KMCY各色の入力画像制御部(K)136、(M)137、(C)138、(Y)139、KMCY各色のラインメモリ(K)120、(M)121、(C)122、(Y)123、KMCY各色の書込み制御部(K)102、(M)103、(C)104、(Y)105から構成される。
【0029】
更に、書込み制御部(K)102は、位置ずれ補正処理部(K)124、書込画像処理部(K)140、位置ずれ補正パターン生成部(K)128、LDデータ出力部(K)132から構成される。
【0030】
また、書込み制御部(M)103は、位置ずれ補正処理部(M)125、書込画像処理部(M)141、位置ずれ補正パターン生成部(M)129、LDデータ出力部(M)133から構成される。
【0031】
また、書込み制御部(C)104は、位置ずれ補正処理部(C)126、書込画像処理部(C)142、位置ずれ補正パターン生成部(C)130、LDデータ出力部(C)134から構成される。
【0032】
また、書込み制御部(Y)105は、M色と同様に、位置ずれ補正処理部(Y)127、書込画像処理部(Y)143、位置ずれ補正パターン生成部(Y)131、LDデータ出力部(Y)135から構成される。
【0033】
図5においては、説明を簡略にするため、図3で説明した各色の主走査同期信号(K,M,C,Y)_IPLGATE_Nと副走査同期信号(K,M,C,Y)_IPFGATE_Nおよびそれら同期信号に伴う画像信号(K,M,C,Y)_IPDATA_Nの3信号をあわせて書込み制御信号(K,M,C,Y)_IPSIGNAL_Nと表示している。
【0034】
図5において、書込み制御信号K_IPSIGNAL_Nは、画像処理部112から副走査タイミング信号K_FSYNC_Nの受信をトリガに入力画像制御部(K)136に送信される。入力画像制御部(K)136は、ラインメモリ(K)120に画像信号を一時記憶しながら、書込み制御部(K)102に画像信号を送信する。書込み制御部(K)102内部では、書込画像処理部(K)140が、入力画像制御部(K)136から送信された画像信号をLDデータ出力部(K)132に送信する。LDデータ出力部(K)132は、K色書込み画像信号K_LDDATAを生成しLD制御部(K)106に送信する。
【0035】
更に、M色、C色、Y色については、入力画像制御部(M)137、(C)138、(Y)139は、RAM111に記憶された位置ずれ補正量に基づいて位置ずれ量補正のためにそれぞれラインメモリ(M)121、(C)122、(Y)123に画像信号を一時記憶する。位置ずれ補正処理部(M)125、(C)126、(Y)127は、一時記憶された画像信号に位置ずれ補正量による位置ずれ量補正処理を実行した後、それぞれ書込画像処理部(M)141、(C)142、(Y)143に画像信号を送信する。K色の動作と同様に、各色の書込画像処理部から画像信号を送信された各色のLDデータ出力部は、書込み画像信号(M,C,Y)_LDDATAを生成し各色のLD制御部(M)107、(C)108、(Y)109にそれぞれ送信する。上記位置ずれ補正量については、後に詳細を説明する。
【0036】
また、位置ずれ補正用パターン14を出力する際には、位置ずれ補正パターン生成部(K)128、(M)129、(C)130、(Y)131からKMCY各色のパターン画像信号が各色のLDデータ出力部(K)132、(M)133、(C)134、(Y)135に送信される。その後は、上記における説明と同様の動作を行う。
【0037】
次に図6を用いて、発光素子アレイ9K〜9Yの取り付け構造について説明する。図6は、発光素子アレイ9K〜9Yが取り付けられる画像形成装置100の躯体を下方から見た模式図である。図中における上下方向が主走査方向に該当し、左右方向が副走査方向に該当する。
【0038】
図6−1(a)は、発光素子アレイ9K〜9Yをそれぞれ平行になるよう取り付けた場合を示している。発光素子アレイ9K〜9Yは、それぞれ複数個のLEDを一列に並べて構成されており、LED1点が1dotに相当する。したがって、LEDの数が異なって発光素子アレイ9K〜9Yの主走査方向の長さが異なると、その長さのバラツキがそのまま主走査倍率ずれとなる。発光素子アレイ9K〜9Y毎の主走査倍率が異なることから、印刷時に主走査倍率ずれが生じてしまう。そこで、本発明においては、発光素子アレイ9K〜9Yの取り付け角度を調整する機構が設けられている。この機構を利用することで、図6−1(b)に示されるように発光素子アレイ9K〜9Yのそれぞれの主走査倍率を同じ長さにすることができる。このとき、基準としたのはもっとも主走査長が短いY色の発光素子アレイ9Yである。
【0039】
この角度を調整する機構の具体的な構成としては、例えば図6−2に示されるように、発光素子アレイ9の一端9aを固定し、この端部を支点として副走査方向に回動可能なようにする構成をとることができる。また、この回動動作は、機器のメンテナンス時に手動で行うこともできるが、アクチュエータ20と連結された稼動部21の前後動作を通じて傾斜角度を調整することもできる。このアクチュエータ20は、上述した位置ずれ補正処理部124〜127とそれぞれ接続されており、この位置ずれ補正処理部124〜127において算出された主走査倍率ずれの補正量に基づき主走査倍率を補正することができる。なお、補正の際には、K色を補正の基準にする方法や、印刷する用紙の主走査方向における長さを取得し、その長さを基準値として補正する方法などを採用することも出来る。
【0040】
以下、位置ずれ量について詳細を説明する。図7は、実施の形態における位置ずれ補正用パターンの構成とスキュー量算出を示す図である。実施の形態における画像形成装置100では、KMCY各色画像の主走査レジストずれ、副走査レジストずれおよび主走査倍率ずれおよび印刷スキューずれが位置ずれ量の要素である。主走査レジストずれおよび副走査レジストずれは、発光素子アレイ9が感光体7K、7M、7C、7Y上に静電潜像を形成する主走査方向および副走査方向の始点位置W点とX点を示す。主走査倍率ずれは、発光素子アレイ9が感光体7K、7M、7C、7Y上に静電潜像を形成する主走査方向の終点位置Y点を示す。
【0041】
すなわち、主走査レジストずれ、副走査レジストずれおよび主走査倍率ずれの三特性値が適正に補正されれば、出力画像上の先端領域W−Y間と片側端部領域W−X間の位置関係が正確に出力されることになる。算出された主走査レジストずれ、副走査レジストずれに従って、主走査遅延量、副走査遅延量が設定され、LD制御部(K)106、(M)107、(C)108、(Y)109に送信される。
【0042】
主走査倍率ずれは、上述した発光素子アレイ9K〜9Yの取り付け角度を変更することによって、補正をすることもできる。異なる長さの発光素子アレイを取り付けた場合、それぞれの主走査倍率が異なることから、このずれを補正するためには発光素子アレイ9K〜9Yの取り付け角度を調整して、主走査方向における長さを同一にする補正を行う。なお、この補正においては、もっとも短い発光素子アレイの主走査倍率を取得し、その主走査倍率に合わせるように他の発光素子アレイを傾けるようにしても良い。また、印刷する用紙サイズからその主走査方向における長さを求め、この長さと同一となるよう発光素子アレイの傾きを変更しても良い。
【0043】
このような発光素子アレイを傾ける角度を補正する場合に、傾き量ΔHを算出するためには、目標となる主走査倍率をL、主走査倍率ずれをΔLとすると、
(数1)
ΔH=√(L+ΔL)2―L2
と示すことができる。なお、このとき算出した傾き量ΔHは、後の印刷スキューずれの補正量を算出する際に用いるため、RAM111に記憶される。
【0044】
主走査倍率ずれは書込み制御部101内部で生成された画素クロック周波数によって適正に補正される。そのため、周波数を非常に細かく設定できるデバイス、例えばVCO(Voltage Controlled Oscillator)を利用したクロックジェネレータ等が使用される。
【0045】
主走査の色ずれを補正する場合、主走査倍率と主走査の書き出しタイミングを補正するが、主走査倍率補正は、検出した各色の倍率誤差量に基づく画素クロック周波数の変更を書込み制御部101にて行う。
【0046】
すなわち、主走査レジスト、副走査レジストおよび主走査倍率の三特性値が適正に補正されれば、出力画像上の先端領域W−Y間と片側端部領域W−X間の位置関係が正確に出力されることになる。算出された主走査レジスト、副走査レジストに従って、主走査遅延量、副走査遅延量が設定され、LD制御部(K)106、(M)107、(C)108、(Y)109に送信される。主走査倍率は書込み制御部101内部で生成された画素クロック周波数によって適正に補正される。そのため、周波数を非常に細かく設定できるデバイス、例えばVCO(Voltage Controlled Oscillator)を利用したクロックジェネレータ等が使用される。
【0047】
主走査の色ずれを補正する場合、主走査倍率と主走査の書き出しタイミングを補正するが、主走査倍率補正は、検出した各色の倍率誤差量に基づく画素クロック周波数の変更を書込み制御部101にて行う。
【0048】
更に、KMCY各色の画像プロセス部(K)1K、(M)1M、(C)1C、(Y)1Yから中間転写ベルト3への転写位置が異なるため、副走査方向の位置関係に誤差が生じやすい。この副走査方向の位置関係を印刷スキューずれ量と名づける。従って、印刷スキューずれ量が適正に補正されれば、上記のW点、X点、Y点に加えて、Z点も正確な位置関係となり、出力画像上の全領域の位置関係が正確に出力されることになる。
【0049】
以下、印刷スキューずれ量算出について詳細を説明する。図7において、L側パターン検知センサ15とR側パターン検知センサ16と中央パターン検知センサ17とが通過する位置(図7の左右方向、及び中央の位置)に、3群の位置ずれ補正用パターン14がそれぞれ中間転写ベルト3上に形成される。L側パターン検知センサ15が通過する位置にパターンK11、C11、M11、Y11、K12、C12、M12、Y12が形成され、R側パターン検知センサ16が通過する位置にパターンK21、C21、M21、Y21、K22、C22、M22、Y22が形成され、中央側パターン検知センサ17が通過する位置にパターンK31、C31、M31、Y31、K32、C32、M32、Y32が形成される。なお、L側は図7中左側配置を示し、R側は図7中右側配置を示す。
【0050】
L側パターン検知センサ15は、L側パターンK11とC11の位置を検出し、その位置関係からK色とC色のL側距離KC_Lを算出する。一方、R側パターン検知センサ16は、R側パターンK21とC21の位置を検出し、その位置関係からK色とC色のR側距離KC_Rを算出する。ここで、K色を基準としたC色のスキュー量KC_Skewが数2式により算出される。
(数2)
KC_Skew=KC_R−KC_L
【0051】
また、M色、Y色についても同様に、パターン検出により、以下の数3式、数4式からそれぞれスキュー量KM_Skew、KY_Skewが算出される。
(数3)
KM_Skew=KM_R−KM_L
(数4)
KY_Skew=KY_R−KY_L
【0052】
このように、数2式〜数4式により、K色を基準としたC色、M色、Y色のスキュー量KC_Skew、KM_SkewおよびKY_Skewが算出される。
【0053】
なお、2点間の検知用パターンを用いた位置ずれの算出方法ではなく、中央側パターン検知センサ17を含めた3点間で計測を行い、走査線曲がりもあわせて検出することもできる。なお、パターンK12、C12、M12、Y12、K22、C22、M22、Y22については、前述した主走査レジスト、副走査レジストおよび主走査倍率の三特性値を算出するためのパターンであり、これらパターンの検出方法および三特性値の算出方法に技術の可否が依存するところではなく、ここでは説明を省略する。
【0054】
上記のように、算出したスキュー量に応じて画像補正を実行するために、画像信号をラインメモリに格納する。ラインメモリに格納した後、印刷スキューずれ量補正を実行された画像信号が発光素子アレイ9に送信され、感光体上に書きこまれることによって、印刷スキューずれ量を補正された画像が形成される。
【0055】
以下、印刷スキューずれ補正前のラインメモリ格納について詳細を説明する。図8-1は、実施の形態におけるスキュー補正量が補正範囲内の場合のラインメモリ格納を示す図である。更に、図8−2は、実施の形態におけるスキュー補正量が補正範囲を越えた場合のラインメモリ格納を示す図である。ここで、補正範囲は、所定のラインメモリ容量から決定されるスキュー補正可能な限界値である。したがって、上述した発光素子アレイ9Y〜9Kの角度調整を行うと副走査方向にずれが生じてしまうが、そのために必要な印刷スキューずれ補正量がこの限界値の範囲となるように角度調整を行う必要がある。補正範囲をmとすると、スキュー量を補正するために画素をずらす際に、最低1ドットラインは主走査方向に重ならせる必要がある。従って、下記の数5式によって決定される数値である。
(数5)
m=l−1[ドット](ラインメモリのライン数:l)
【0056】
数5式は、ラインメモリのライン数から補正可能なドット数を算出している。もし、ラインメモリのライン数が4ラインであれば、3ラインが補正範囲となり、出力解像度が600dpiの場合、距離に換算すると127[um]となる。
【0057】
図8−1の場合、画像補正に必要なラインメモリのライン数は2ラインとなり、スキュー補正量が補正範囲以下であるため、不足することなく従来通りラインメモリに格納される。一方、図8−2の場合、画像補正に必要なラインメモリのライン数は5ラインとなり、スキュー補正量が補正範囲を越えているため、ラインメモリ容量は不足し、必要な5ライン以上のラインメモリが確保されるように画像信号の低減処理が実行された後、ラインメモリに格納される。
【0058】
以下、画像の低減処理について詳細を説明する。図9は、実施の形態における階調数低減を実現したメモリ構成を示す図である。実施の形態においては、階調数を下げる画像の低減処理を実行することにより、ラインメモリの容量を増やすことなく、画像上の実用補正領域を広げ、結果的にスキュー量の補正領域を広げることができる。スキュー補正量が補正範囲内である場合、画像信号の階調数は4bitであるとすると、ラインメモリL1、L2、・・・Lnに4bitの画像信号が格納される。スキュー補正量が補正範囲を越えた場合、画像信号の階調数は4bitから2bitに低減され、ラインメモリL1、L2、・・・Lnに2bitの画像信号が格納される。従って、1ラインあたりのメモリ容量が半減したため、補正範囲内の場合に比べて、2倍のライン数を有するラインメモリ構成が可能となる。その結果、スキュー量の補正領域を2倍に広げることができた。
【0059】
以下、ラインメモリ構成について説明する。上記のように画像の低減処理を実行された後、各色のラインメモリ(K)120、(M)121、(C)122、(Y)123に画像信号が格納される。図10は、実施の形態におけるラインメモリ構成の一例を示す図である。スキュー補正量が補正範囲内の場合、図10の左側、「補正範囲内の場合」に示すように、ラインメモリ(K)120、ラインメモリ(M)121、ラインメモリ(C)122、ラインメモリ(Y)123は、それぞれ2ライン、5ライン、5ライン、5ラインから構成される。しかし、各色のスキュー補正量が補正範囲を越えた場合、図10の右側、「補正範囲を越えた場合」に示すように、画像の低減処理が実行されたことによって、各色のラインメモリはそれぞれ2倍となり、4ライン、10ライン、10ライン、10ラインの構成に変更される。このように、画像がラインメモリに格納された後、スキュー量補正が実行される。
【0060】
以下、スキュー補正量について詳細を説明する。表1に、算出されたスキュー量の一例を示す。この際、数字の前の符号は、副走査方向のずれ方向を示し、任意に定義できるものである。本実施の形態においては、画像形成の先端側、すなわち図中上方向をプラスと定義する。
【表1】
【0061】
この場合、出力解像度を600dpiと仮定すると、600dpiの1ラインが最小補正単位となるので、スキュー量を最小補正単位で除算することにより、スキュー補正量は、表2のようになる。
【表2】
【0062】
しかし、600dpiの1ラインが最小補正単位であるため、表2に示される小数点以下は補正不能であり、四捨五入、桁上げ、もしくは桁下げ等によって整数に置き換えられる。ここでは、例として四捨五入を採用すると、最終的に、スキュー補正量は、表3のようになる。
【表3】
【0063】
表3のようなスキュー補正量は、図5のブロック図において、説明した入力画像制御部(M)137、(C)138、(Y)139によって算出され、RAM111に記憶される。
【0064】
以下、上記のように算出されたスキュー補正量に対する画像補正について説明する。図11−1は、実施の形態におけるスキュー補正量が1ドットの場合のスキュー補正を示す図である。図11−1の(a)は、中間転写ベルト3上で右下がりに1ラインスキューした状態を示している。図11−1の(b)は、主走査方向に4800画素ある画像信号を主走査方向に2分割する状態を示す。この際、主走査方向の始点を左端、副走査方向のシフト方向として画像の上方向を+と定義すると、分割位置2400画素、4800画素に対して、それぞれスキュー補正量は0、+1となり、画像補正の結果、図11−1の(c)となる。図11−1の(c)は、副走査方向上側に1画素シフトしたことによって画像補正された状態を示す。
【0065】
一方、図11−2は、実施の形態におけるスキュー補正量が3ドットの場合のスキュー補正を示す図である。図11−2の(a)は、中間転写ベルト3上で右上がりに3ラインスキューした状態を示している。図11−2の(b)は、主走査方向に4800画素ある画像信号を主走査方向に4分割する状態を示す。この際、分割位置1200画素、2400画素、3600画素、4800画素に対して、それぞれスキュー補正量は0、−1、−2、−3となり、画像補正の結果、図11−2の(c)となる。図11−2の(c)は、副走査方向にシフトしたことによって画像補正された状態を示す。
【0066】
以下、パターン形成からスキュー補正量算出までの一連の動作を説明する。図12は、実施の形態における位置ずれ補正量算出のフローチャート図である。まず、位置ずれ補正用パターン14を中間転写ベルト3上に形成する(ステップS101)。L側パターン検知センサ15およびR側パターン検知センサ16によって、パターン検知が実行される(ステップS102)。KMCY各色の主走査レジスト、副走査レジストおよび主走査倍率の補正量を算出する(ステップS103)。なお、この主走査倍率の補正量としては、発光素子アレイの傾き量の算出も含まれている。次いで、K色を基準としたM、CおよびY色のスキュー量を算出する(ステップS104)。M、CおよびY色のスキュー補正量を算出する(ステップS105)。なお、ステップS105のスキュー補正量の算出の際には、パターン検知から算出された値に加え、主走査倍率ずれの補正のために調整した発光素子アレイ9Y〜9Kの傾き量ΔHの値を反映した形で算出する。算出した各色の位置ずれ補正量(主走査レジスト、副走査レジスト、主走査倍率およびスキュー量の各補正量)をRAM111に記憶する(ステップS106)。
【0067】
なお、色ずれ補正算出のフローチャートにおいて算出された各補正量は、通常は印刷の実行時にこの補正量に基づいて補正が実行される。しかしながら、印刷がされない場合であっても、発光素子アレイの傾き角度の調整による補正は実行可能であるため、その補正実行の処理の流れを説明する。図13は、補正実行の処理の流れを示したフローチャート図である。図13に示されるように、位置ずれ補正処理部124〜127は、内部に時間をカウントするカウンタを備えており、時間をカウントする(ステップS201)。位置ずれ補正処理部124〜127は、カウントした時間が前回の位置ずれ補正からX時間経過したか否かを判断する(ステップS202)。X時間以上経過していると判断された場合、上述の補正算出処理によって算出された主走査倍率の補正量に基づき、発光素子アレイ9K〜9Yの傾き量を調整する(ステップS203)。X時間経過していないと判断された場合は、処理を終了する。
【0068】
以上に示した、画像形成装置100においては、発光素子アレイ9K〜9Yの取り付け角度をそれぞれ変更することで、主走査倍率の補正を行うことができるようにしたため、印刷時ではなくとも、ハード的に主走査倍率の補正を行うことができる。そのため、印刷ごとにデジタル的に毎回補正の実施を行わなくても良いため、位置ずれ補正にかかる処理の負荷を軽減することができる。
【0069】
また、異なる長さの発光素子アレイ9K〜9Yを取り付けた場合であっても、主走査倍率を同一とすることができるため、長さの異なる発光素子アレイ9K〜9Yをバラバラに交換することが出来、管理やメンテナンスの煩雑さを低減することができる。
【0070】
また、自動的に発光素子アレイ9K〜9Yの傾きを調整する稼動部21を設けることとしたため、手動でメンテナンスを行う必要がなく、保守の手間を軽減することができるようになる。
【0071】
また、主走査倍率ずれの補正のために発光素子アレイ9K〜9Yを傾けるとスキューのずれが生じるが、傾けた後の印刷時にスキューを補正することとしたため、このスキューずれも解消することができる。
【0072】
図14は、画像形成装置100のハードウェア構成例を示すブロック図である。画像形成装置100は、I/O I/F30と、マルチプレクサ31、35と、A/Dコンバータ32、36と、制御回路33、37と、レジスタ34と、デマルチプレクサ38と、LPF回路(デジタルフィルタ回路:積和演算回路)39〜41と、エッジ検出回路42〜44と、CPU110と、RAM111と、ROM46とを備えている。パターン検知用センサ15〜17や、プロセスコントロール用パターン検知センサ18からの検知信号は、I/O I/F30からマルチプレクサ31に入力される。
【0073】
制御回路33は、プロセスコントロール用パターン検知センサ18からの検知信号が入力されると、マルチプレクサ31、及びA/Dコンバータ32を検知用パターン形成中にセンサのチャンネルの選択と、A/D変換動作を行うように制御し、ここでデジタル化されたデータはレジスタ34に保存される。CPU110は、得られたデータを通じて、帯電、現像、転写等におけるプロセス管理のための設定を変更する。
【0074】
制御回路33は、マルチプレクサ31、及びA/Dコンバータ32を検知用パターン形成中にセンサのチャンネルの選択と、A/D変換動作を行うように制御し、ここでデジタル化されたデータはデマルチプレクサ38に入力される。デマルチプレクサ38は、変換されたデジタルデータをLPF回路39〜41のいずれに出力するかを選択する。LPF回路39〜41は、受信したデータの高周波成分をカットし、より正確に後段回路によりパターン位置を認識できる形に補正する。
【0075】
LPF回路39〜41の後段に位置するエッジ検出回路42〜44は、検出電圧波形を所定のスレッシュ電圧と比較することで、立下り/立ち上がりのポイントを抽出し、その中央をパターン中央位置と認識し、中央値をレジスタ34に格納する。
【0076】
CPU110は、レジスタ34に格納されたデータをROM46に格納されているプログラムに従って、プロセス条件の変更の演算、および位置ずれ補正の演算を行う。この演算結果はRAM111に記憶される。また、CPU110は、レジスタ34に記憶された各設定値を変更することで、サンプリングスタート/ストップの動作切り替え、A/D変換を行う各センサのチャンネルの切り替え、LPF回路39〜41のカットオフ周波数の変更、及びエッジ検出回路42〜44のスレッシ電圧の変更を行う。
【0077】
なお、本実施の形態の画像形成装置100で実行されるプログラムは、ROM等に予め組み込まれて提供される。本実施の形態の画像形成装置100で実行されるプログラムは、インストール可能な形式又は実行可能な形式のファイルでCD−ROM、フレキシブルディスク(FD)、CD−R、DVD(Digital Versatile Disk)等のコンピュータで読み取り可能な記録媒体に記録して提供するように構成してもよい。
【0078】
また、図12におけるステップS105では、発光素子アレイ9Y〜9Kの補正のための角度調整の値を記憶しておき、その値を印刷スキューずれの補正量を算出する際に用いることとしたが、発光素子アレイ9Y〜9Kの角度調整後に、再度パターン形成を行い、そこから印刷スキュー補正の値を演算しても良い。
【0079】
なお、上記実施の形態では、本発明の画像形成装置100を、カラー複写機に適用した例を挙げて説明するが、コピー機能、プリンタ機能、スキャナ機能およびファクシミリ機能のうち少なくとも2つの機能を有する複合機、プリンタ、スキャナ装置、ファクシミリ装置等の画像形成装置100であればいずれにも適用することができる。
【符号の説明】
【0080】
1K 画像プロセス部(K)
1M 画像プロセス部(M)
1C 画像プロセス部(C)
1Y 画像プロセス部(Y)
2 転写紙
3 中間転写ベルト
4 駆動ローラ
5 従動ローラ
6 給紙トレイ
7K 感光体(K)
7M 感光体(M)
7C 感光体(C)
7Y 感光体(Y)
8K 帯電器(K)
8M 帯電器(M)
8C 帯電器(C)
8Y 帯電器(Y)
9 発光素子アレイ
10K 現像器(K)
10M 現像器(M)
10C 現像器(C)
10Y 現像器(Y)
11K 感光体クリーニング器(K)
11M 感光体クリーニング器(M)
11C 感光体クリーニング器(C)
11Y 感光体クリーニング器(Y)
12K 転写器(K)
12M 転写器(M)
12C 転写器(C)
12Y 転写器(Y)
13 定着器
14 位置ずれ補正用パターン
15 L側パターン検知センサ
16 R側パターン検知センサ
101 書込み制御部
102 書込み制御部(K)
103 書込み制御部(M)
104 書込み制御部(C)
105 書込み制御部(Y)
106 LD制御部(K)
107 LD制御部(M)
108 LD制御部(C)
109 LD制御部(Y)
110 CPU
111 RAM
112 画像処理部
113 パターン検知部
114 エンジン制御部
115 プリンタコントローラ
116 スキャナ
120 ラインメモリ(K)
121 ラインメモリ(M)
122 ラインメモリ(C)
123 ラインメモリ(Y)
124 位置ずれ補正処理部(K)
125 位置ずれ補正処理部(M)
126 位置ずれ補正処理部(C)
127 位置ずれ補正処理部(Y)
128 位置ずれ補正パターン生成部(K)
129 位置ずれ補正パターン生成部(M)
130 位置ずれ補正パターン生成部(C)
131 位置ずれ補正パターン生成部(Y)
132 LDデータ出力部(K)
133 LDデータ出力部(M)
134 LDデータ出力部(C)
135 LDデータ出力部(Y)
136 入力画像制御部(K)
137 入力画像制御部(M)
138 入力画像制御部(C)
139 入力画像制御部(Y)
140 書込み画像処理部(K)
141 書込み画像処理部(M)
142 書込み画像処理部(C)
143 書込み画像処理部(Y)
K11、K12 L側位置ずれ補正用パターン(K)
M11、M12 L側位置ずれ補正用パターン(M)
C11、C12 L側位置ずれ補正用パターン(C)
Y11、Y12 L側位置ずれ補正用パターン(Y)
K21、K22 R側位置ずれ補正用パターン(K)
M21、M22 R側位置ずれ補正用パターン(M)
C21、C22 R側位置ずれ補正用パターン(C)
Y21、Y22 R側位置ずれ補正用パターン(Y)
KC_L L側位置ずれ量(C)
KC_R R側位置ずれ量(C)
KC_Skew スキュー量(C)
KM_L L側位置ずれ量(M)
KM_R R側位置ずれ量(M)
KM_Skew スキュー量(M)
KY_L L側位置ずれ量(Y)
KY_R R側位置ずれ量(Y)
KY_Skew スキュー量(Y)
LK レーザ光(K)
LM レーザ光(M)
LC レーザ光(C)
LY レーザ光(Y)
STTRIG_N スタート信号
K_FSYNC_N K色同期信号
M_FSYNC_N M色同期信号
C_FSYNC_N C色同期信号
Y_FSYNC_N Y色同期信号
K_FSYNC_N K色副走査タイミング信号
M_FSYNC_N M色副走査タイミング信号
C_FSYNC_N C色副走査タイミング信号
Y_FSYNC_N Y色副走査タイミング信号
K_IPFGATE_N K色副走査同期信号
M_IPFGATE_N M色副走査同期信号
C_IPFGATE_N C色副走査同期信号
Y_IPFGATE_N Y色副走査同期信号
K_IPDATA_N K色画像信号
M_IPDATA_N M色画像信号
C_IPDATA_N C色画像信号
Y_IPDATA_N Y色画像信号
K_mfcntld K色副走査遅延量
M_mfcntld M色副走査遅延量
C_mfcntld C色副走査遅延量
Y_mfcntld Y色副走査遅延量
K_LDDATA K色書込み画像信号
M_LDDATA M色書込み画像信号
C_LDDATA C色書込み画像信号
Y_LDDATA Y色書込み画像信号
【先行技術文献】
【特許文献】
【0081】
【特許文献1】特開2003−285473号公報
【特許請求の範囲】
【請求項1】
各感光体に対して独立に光を照射する複数の発光素子アレイと、
前記発光素子アレイの装置躯体への取り付け角度を調整する角度調整手段と、
像担持体上に各色の位置ずれ補正用の補正パターンを形成するパターン形成手段と、
前記像担持体上に形成された前記補正パターンを検知する検知手段と、
前記検知手段によって検知された前記補正パターンに基づいて、印刷スキューずれ、及び前記発光素子アレイの主走査倍率ずれを算出する位置ずれ算出手段と、
前記角度調整手段による角度の調整後に、前記位置ずれ算出手段によって検出される前記印刷スキューずれを補正するスキュー補正手段と、
を備えることを特徴とする画像形成装置。
【請求項2】
前記主走査倍率ずれに基づいて、前記角度調整手段を用いて前記発光素子アレイの主走査方向における取り付け角度を変更することで前記主走査倍率ずれを補正する主走査倍率補正手段
を備えることを特徴とする請求項1に記載の画像形成装置。
【請求項3】
前記主走査倍率補正手段は、前記発光素子アレイのうち、最も主走査長が短い発光素子アレイに対して、他の発光素子アレイの主走査長が同一となるように、前記他の発光素子アレイのそれぞれの取り付け角度を変更する
ことを特徴とする請求項1又は2に記載の画像形成装置。
【請求項4】
前記主走査倍率補正手段は、印刷可能な最大サイズの用紙の給紙時の主走査方向における長さに対して、前記発光素子アレイの主走査長さが同一となるよう、それぞれの前記発光素子アレイの取り付け角度を変更する
ことを特徴とする請求項1又は2に記載の画像形成装置。
【請求項5】
前記主走査倍率補正手段は、前回の主走査倍率補正手段による補正の実行から、一定の時間が経過するごとに、前記主走査倍率ずれを補正する
ことを特徴とする請求項1〜4のいずれか一項に記載の画像形成装置。
【請求項1】
各感光体に対して独立に光を照射する複数の発光素子アレイと、
前記発光素子アレイの装置躯体への取り付け角度を調整する角度調整手段と、
像担持体上に各色の位置ずれ補正用の補正パターンを形成するパターン形成手段と、
前記像担持体上に形成された前記補正パターンを検知する検知手段と、
前記検知手段によって検知された前記補正パターンに基づいて、印刷スキューずれ、及び前記発光素子アレイの主走査倍率ずれを算出する位置ずれ算出手段と、
前記角度調整手段による角度の調整後に、前記位置ずれ算出手段によって検出される前記印刷スキューずれを補正するスキュー補正手段と、
を備えることを特徴とする画像形成装置。
【請求項2】
前記主走査倍率ずれに基づいて、前記角度調整手段を用いて前記発光素子アレイの主走査方向における取り付け角度を変更することで前記主走査倍率ずれを補正する主走査倍率補正手段
を備えることを特徴とする請求項1に記載の画像形成装置。
【請求項3】
前記主走査倍率補正手段は、前記発光素子アレイのうち、最も主走査長が短い発光素子アレイに対して、他の発光素子アレイの主走査長が同一となるように、前記他の発光素子アレイのそれぞれの取り付け角度を変更する
ことを特徴とする請求項1又は2に記載の画像形成装置。
【請求項4】
前記主走査倍率補正手段は、印刷可能な最大サイズの用紙の給紙時の主走査方向における長さに対して、前記発光素子アレイの主走査長さが同一となるよう、それぞれの前記発光素子アレイの取り付け角度を変更する
ことを特徴とする請求項1又は2に記載の画像形成装置。
【請求項5】
前記主走査倍率補正手段は、前回の主走査倍率補正手段による補正の実行から、一定の時間が経過するごとに、前記主走査倍率ずれを補正する
ことを特徴とする請求項1〜4のいずれか一項に記載の画像形成装置。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6−1】
【図6−2】
【図7】
【図8−1】
【図8−2】
【図9】
【図10】
【図11−1】
【図11−2】
【図12】
【図13】
【図14】
【図2】
【図3】
【図4】
【図5】
【図6−1】
【図6−2】
【図7】
【図8−1】
【図8−2】
【図9】
【図10】
【図11−1】
【図11−2】
【図12】
【図13】
【図14】
【公開番号】特開2013−97156(P2013−97156A)
【公開日】平成25年5月20日(2013.5.20)
【国際特許分類】
【出願番号】特願2011−239495(P2011−239495)
【出願日】平成23年10月31日(2011.10.31)
【出願人】(000006747)株式会社リコー (37,907)
【Fターム(参考)】
【公開日】平成25年5月20日(2013.5.20)
【国際特許分類】
【出願日】平成23年10月31日(2011.10.31)
【出願人】(000006747)株式会社リコー (37,907)
【Fターム(参考)】
[ Back to top ]