
画像検索方法及び画像検索装置ならびにプログラム
【課題】
大量のデータ画像の中からクエリー画像に類似する画像を漏れなく抽出する画像検索方法、装置およびプログラムを提供する。
【解決手段】データ画像に属する画素を3次元の色空間に写像する写像手段7と、前記色空間に写像されたクエリー画像に属する全ての画素の集合の重心と前記色空間の原点を通る直線を回転軸とし、前記原点を頂点とする円錐であって、前記クエリー画像に属する全ての画素をその内側の領域に包含する最小の円錐(以下クエリー円錐と言う。)の外側の領域に存在する前記データ画像の画素の数(以下、「画素の数」と言う。)を計数する計数手段8と、前記画素の数が所定の閾値より小さい場合に前記データ画像を前記クエリー画像に近似する画像と判定する閾値判定手段9とを備える
大量のデータ画像の中からクエリー画像に類似する画像を漏れなく抽出する画像検索方法、装置およびプログラムを提供する。
【解決手段】データ画像に属する画素を3次元の色空間に写像する写像手段7と、前記色空間に写像されたクエリー画像に属する全ての画素の集合の重心と前記色空間の原点を通る直線を回転軸とし、前記原点を頂点とする円錐であって、前記クエリー画像に属する全ての画素をその内側の領域に包含する最小の円錐(以下クエリー円錐と言う。)の外側の領域に存在する前記データ画像の画素の数(以下、「画素の数」と言う。)を計数する計数手段8と、前記画素の数が所定の閾値より小さい場合に前記データ画像を前記クエリー画像に近似する画像と判定する閾値判定手段9とを備える
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、大量のデータ画像の中からクエリー画像と類似する画像を抽出する画像検索方法、装置及びプログラムに関する。
【背景技術】
【0002】
画像データベースに蓄えられた大量のデータ画像の中からクエリー画像と同一又は類似する画像を抽出する方法、装置については多くの提案がなされている。例えば、特許文献1には、入力画像中の被写体の形状情報およびテクスチャ情報を抽出して、データベース中の各画像との類似度を算出し、算出された類似度に基づいて、入力画像と類似している類似画像データを検索する類似画像検索装置が開示されている。
【0003】
しかしながら、クエリー画像と大量のデータ画像の間の類似度を全て算出するのは、時間がかかるという問題がある。また、大部分のデータ画像はクエリー画像とは大きく異なるのが普通だから、全てのデータ画像について精密な検索を行うことは意味がない。そこで、簡易な方法で粗検索を行って、「クエリー画像との差異が大きいデータ画像」を精密検索の対象から排除して、残ったデータ画像に対して精密検索を行うことが行われている。
【0004】
例えば、特許文献2には、一枚の画像中で使用されている代表色を予め抽出して色空間上にマッピングしておき、画像検索の際に入力して描いた問い合わせ画像の中で使用されている色情報を前記色空間上に投影した後にその近傍にマッピングされている画像に対してのみ整合・評価を行う画像検索方法が開示されている。
【0005】
【特許文献1】特開2005−243178号公報
【特許文献2】特開平6−243178号公報
【発明の開示】
【発明が解決しようとする課題】
【0006】
特許文献2に記載の発明は、色空間上にマッピングされたデータ画像の代表色とクエリー画像の色情報の遠近に基づいて粗検索を行った後で、精密検索を行うので、画像検索の高速化が期待できる。しかしながら、代表色の選び方によって、検索漏れが生じるおそれがある。すなわち、代表色はデータ画像の特定の領域の色であるが、クエリー画像の特徴が当該特定の領域にはない場合はクエリー画像に類似するデータ画像を抽出できないという問題が生じる。
【0007】
本発明は、上記の課題に鑑みてなされたものであり、大量のデータ画像の中からクエリー画像に類似する画像を漏れなく抽出する画像検索方法、装置を提供するものである。
【課題を解決するための手段】
【0008】
本発明に係る画像検索方法の第1の構成は、データ画像に属する画素を3次元の色空間に写像する写像ステップと、前記色空間に写像されたクエリー画像に属する全ての画素の集合の重心と前記色空間の原点を通る直線を回転軸とし、前記原点を頂点とする円錐であって、前記クエリー画像に属する全ての画素をその内側の領域に包含する最小の円錐(以下クエリー円錐と言う。)の外側の領域に存在する前記データ画像の画素の数(以下、「画素の数」と言う。)を計数する計数ステップと、前記画素の数が所定の閾値より小さい場合に前記データ画像を前記クエリー画像に近似する画像と判定する閾値判定ステップとを有するものである。
【0009】
この構成によれば、円錐という比較的単純な立体図形を用いて領域を設定し、データ画像の画素がその領域に属すか否かという単純な論理で検索を行うので、高速検索が可能になる。
【0010】
本発明に係る画像検索方法の第2の構成は、前記第1の構成において、第1の色空間に写像されたクエリー画像の全ての画素の集合の重心を算出する重心算出ステップと、前記第1の色空間の原点を原点とし、前記重心と前記第1の色空間の原点を結ぶ直線を第1の座標軸とする第2の色空間を定義する色空間設定ステップと、前記第2の色空間において、クエリー円錐の頂角と高さを算出するクエリー円錐算出ステップとを有し、前記写像ステップは前記データ画像を前記第2の色空間に写像することを特徴とする。
【0011】
この構成によれば、データ画像をクエリー円錐の回転軸を座標軸とする座標系で定義される空間に写像するので、前記データ画像の画素がクエリー円錐の領域のどちら側にあるかを判定する演算が簡単になる。
【0012】
本発明に係る画像検索方法の第3の構成は、前記第2の構成において、前記第2の色空間は、直交座標系で定義される3次元色空間であることを特徴とする。
【0013】
この構成によれば、前記データ画像の写像は線形変換のみで行えるので、演算がさらに簡単になる。
【0014】
本発明に係る画像検索方法の第4の構成は、前記第2の構成において、前記第2の色空間は、円筒座標系で定義される3次元色空間であることを特徴とする。
【0015】
この構成によれば、円筒座標系でクエリー円錐の領域を記述するので、前記データ画像の画素がクエリー円錐の領域のどちら側にあるかを計算する演算が、さらに簡単になる。
【0016】
本発明に係る画像検索装置の第1の構成は、データ画像に属する画素を3次元の色空間に写像する写像手段と、前記色空間に写像されたクエリー画像に属する全ての画素の集合の重心と前記色空間の原点を通る直線を回転軸とし、前記原点を頂点とする円錐であって、前記クエリー画像に属する全ての画素をその内側の領域に包含する最小の円錐(以下クエリー円錐と言う。)の外側の領域に存在する前記データ画像の画素の数(以下、「画素の数」と言う。)を計数する計数手段と、前記画素の数が所定の閾値より小さい場合に前記データ画像を前記クエリー画像に近似する画像と判定する閾値判定手段とを備えるものである。
【0017】
本発明に係る画像検索装置の第2の構成は、前記第1の構成において、第1の色空間に写像されたクエリー画像の全ての画素の集合の重心を算出する重心算出手段と、前記第1の色空間の原点を原点とし、前記重心と前記第1の色空間の原点を結ぶ直線を第1の座標軸とする第2の色空間を定義する色空間設定手段と、前記第2の色空間において、クエリー円錐の頂角と高さを算出するクエリー円錐算出手段とを備え、前記写像手段は前記データ画像を前記第2の色空間に写像することを特徴とする。
【0018】
本発明に係る画像検索装置の第3の構成は、前記第2の構成において、前記第2の色空間は、直交座標系で定義される3次元色空間であることを特徴とする。
【0019】
本発明に係る画像検索装置の第4の構成は、前記第2の構成において、前記第2の色空間は、円筒座標系で定義される3次元色空間であることを特徴とする請求項2に記載の画像検索装置。
【0020】
本発明に係るプログラムは、前記第1乃至第4の構成に係る画像検索方法をコンピュータに実行させることを特徴とする。
【発明の効果】
【0021】
以上説明したように、本発明によれば、大量のデータ画像の中からクエリー画像に類似する画像を漏れなく、高速で抽出することができる。
【発明を実施するための最良の形態】
【0022】
以下、本発明を実施するための最良の形態について、図面を参照しながら説明する。
【実施例】
【0023】
〔画像検索装置〕
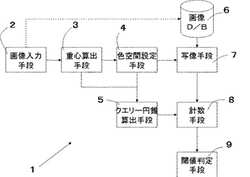
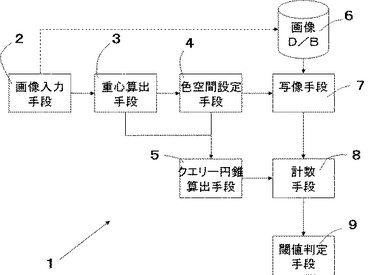
図1は、本発明の実施例に係る画像検索装置の概念的な構成図であり、画像検索装置1は画像入力手段2、重心算出手段3、色空間設定手段4、クエリー円錐算出手段5、画像データベース6、写像手段7、計数手段8および閾値判定手段9から構成される。
【0024】
画像入力手段2は、画像検索のためのクエリー画像を入力するインターフェイスである。クエリー画像はデジタルカメラ等の撮像手段から直接入力される他、記録媒体からの入力、通信回線等を経由する他の情報機器から入力などの入力形態を選択することができる。また、画像入力手段2は画像データベース6に記憶されるデータ画像の入力にも使用される。
【0025】
重心算出手段3は、RGB空間に写像された前記クエリー画像に属する全ての画素の重心CGを算出する手段である。なお、重心算出の具体的な手法は後述する。
【0026】
色空間設定手段4は、前記RGB空間の座標原点を原点とし、前記座標原点と前記重心を結ぶ直線を第1の座標軸とする新たな座標系によって定義される新たな色空間を設定する手段である。なお、色空間設定の具体的な手法は後述する。
【0027】
クエリー円錐算出手段5は、クエリー円錐の高さと頂角を算出する手段である。本明細書において、クエリー円錐とは前記新たな色空間において、前記新たな色空間に写像された前記クエリー画像に属する全ての画素の集合の重心と前記新たな色空間の原点を通る直線を回転軸とし、前記原点を頂点とする円錐であって、前記クエリー画像に属する全ての画素をその内側の領域に包含する最小の円錐を言う。前記クエリー円錐と前記新たな座標系の定義によれば、前記クエリー円錐の頂点は常に前記新たな座標系の原点にあって、前記クエリー円錐の回転軸は常に前記新たな座標系の前記第1の座標軸に一致するから、高さと頂角を算出すれば、前記新たな色空間において前記クエリー円錐を一意に決定することができる。なお、クエリー円錐算出の具体的な手法は後述する。
【0028】
画像データベース6は、検索対象の画像データを記憶して、適宜読み出せるようにした記憶手段である。
【0029】
計数手段8は、画像データベース6から読み出した前記画像データに属する画素の集合を前記新たな色空間に写像して、前記写像された画素の内、前記クエリー円錐の外側の領域に存在する画素を計数する手段である。
【0030】
閾値判定手段9は、計数手段8で計数した画素数を所定の閾値で判別して、前記画素数が前記閾値を下回る場合に、当該データ画像をクエリー画像に近似する画像であると判定する手段である。なお、判定結果は図示しない出力装置に出力される。
【0031】
画像検索装置1はコンピュータに画像入力手段2、重心算出手段3、色空間設定手段4、クエリー円錐算出手段5、写像手段7、計数手段8および判定手段9の処理手順を記述したプログラムをインストールし、当該コンピュータの記憶装置に画像データベース6を備えることで実現できる。前記コンピュータは、既成のパーソナルコンピュータ等の中から適当な機種を選択すれば良いが、専用のハードウェアを設計して、ボードあるいはチップに纏めてもよい。
【0032】
〔画像検索方法〕
図1は本発明の実施例に係る画像検索方法を示すフローチャートであり、図2はRGB空間に写像したクエリー画像に属する画素の集合を示す図であり、図3は、前記画素の集合の重心を説明する図であり、図4は、新たな色空間とクエリー円錐を説明する図である。以下、図2に付したステップ番号を追いながら、本発明の実施例に係る画像検索方法を説明する。また、図1及び図3乃至図5に付した符号も適宜引用する。
【0033】
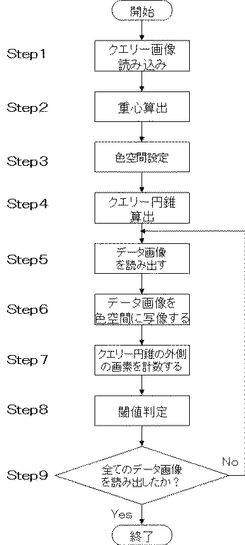
〔ステップ1〕クエリー画像を読み込む。
【0034】
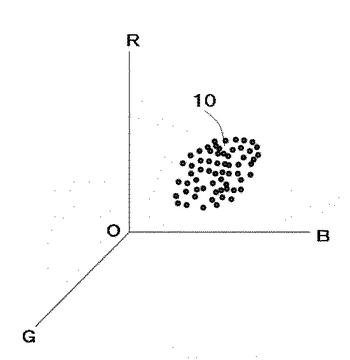
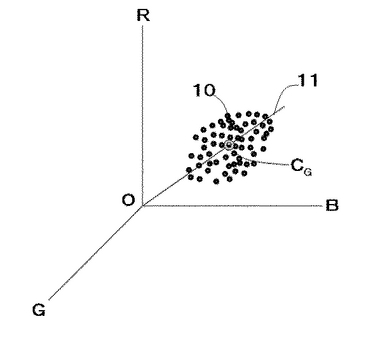
〔ステップ2〕前記クエリー画像に属する全ての画素の集合をRGB色空間に写像し、RGB色空間における前記画素の集合の重心を算出する。ここで、RGB色空間とは、画素の赤(R)、緑(G)および青(B)の各色成分の輝度を直交3軸の座標系の各軸に取る色空間であり、前記クエリー画像に属する画素10は、図3に示すように、RGB空間上に分布する。
【0035】
RGB色空間に写像された前記クエリー画像に属する画素10をPi(Ri,Gi,Bi)で表すことにすると、RGB色空間に写像された前記クエリー画像に属する全ての画素の集合{Pi|i=1,2…,N}の重心CGの座標(RG,GG,BG)は下記の式(1)で得られる。
【0036】
【数1】

【0037】
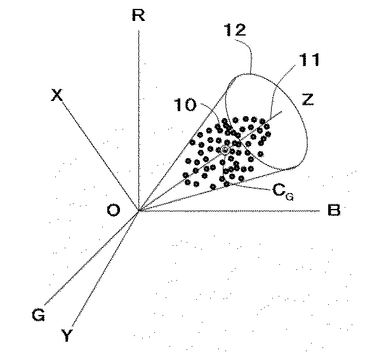
〔ステップ3〕重心CGの座標(RG,GG,BG)が決定すると、図4に示すように、RGB色空間の座標原点Oと重心CGを結ぶ直線11が決定するので、直線11を基準とする新らたな座標系に基づく色空間を設定する。ここでは、つぎのルールによって新たな直交座標系XYZを設定する。
【0038】
(1)RGB色空間の座標原点Oを直交座標系XYZの座標原点とする。
(2)直線11をZ軸にする。
(3)前記座標原点を通る直線であって、RB平面内にあって、Z軸に直交する直線をX軸にする。
(4)Z軸およびX軸に直交する直線をY軸にする。
(5)前記座標原点から重心CGに向かう方向をZ軸の正の方向に決め、他の軸の正の方向は3軸が右手系になるように決める。
以上のようにして、図4に示すような新たな直交座標系XYZが設定される。
【0039】
なお、新たな座標系は上記のような座標系には限られない、例えば、直線11を回転軸とする円筒座標を新たな座標系とすれば、後述するクエリー円錐の取り扱いに便利である。
【0040】
〔ステップ4〕次に、直交座標系XYZにおいて、クエリー円錐12の高さhと、頂角θを算出する。クエリー円錐12の頂点と回転軸は、定義により、直交座標系XYZの座標原点とZ軸に一致するので、高さhと頂角θが決定されれば、直交座標系XYZにおいてクエリー円錐12を一意に決定することができる。
【0041】
そこで、まずRGB色空間上のクエリー画像に属する全ての画素の集合{Pi|i=1,2…,N}を、直交座標系XYZで定義される新たな色空間に写像した画素の集合{P'i|i=1,2…,N}を求める。画素P'iの座標を(Xi,Xi,Zi)と置くと、クエリー円錐12の高さhと、頂角θは、次の式(2)及び式(3)によって算出できる。
【0042】
【数2】
【0043】
〔ステップ5〕データ画像データベース6からデータ画像を読み出す。
【0044】
〔ステップ6〕前記データ画像に属する全ての画素の集合を直交座標系XYZで定義される新たな色空間に写像して、画素の集合{Qj|j=1,2…,M}を求める。
【0045】
〔ステップ7〕さらに、集合{Qj|j=1,2…,M}に属する画素の内、クエリー円錐12の外側の領域に存在する画素の数を計数する。ここで、画素Qjの座標を(X'j,Y'j,Z'j)とすると、下記の式(4)又は式(5)のいずれかを満たす場合に画素Qjはクエリー円錐12の外側の領域に存在する。
【0046】
【数3】
【0047】
〔ステップ8〕前ステップで計数した画素の数を、所定の閾値と較べて、前記画素の数が前記閾値よりも小さければ当該データ画像はクエリー画像に近似する画像であると判断する。なお、前記閾値は、検索対象の画像の特性(例えば、データ画像相互の分散の大きさ)あるいは目的(精密検索か、粗検索か)に応じて、適当な値を与える。また、前記閾値は絶対値で設定してもよいし、相対値(例えば、データ画像に属する画素の総数Mに対する比率)で設定してもよい。
【0048】
〔ステップ9〕全てのデータ画像を読み出していれば終了し、そうでなければステップ5に戻って検索を続ける。
【0049】
以上のように、本実施例によれば、クエリー画像に近似するデータ画像を高速で抽出することができる。なお、本発明に係る画像検索方法・装置は、独立した画像検索方法・装置として使用することもできるし、粗検索‐詳細検索の段階を踏む多段階画像検索方法・装置における粗検索ツールとして使用することもできる。
【図面の簡単な説明】
【0050】
【図1】本発明の実施例に係る実施例に係る画像検索装置の概念的な構成図である。
【図2】本発明の実施例に係る実施例に係る画像検索方法を示すフローチャートである。
【図3】RGB空間に写像したクエリー画像に属する画素の集合を示す図である。
【図4】前記画素の集合の重心を説明する図である。
【図5】新たな色空間とクエリー円錐を説明する図である。
【符号の説明】
【0051】
1 画像検索装置
2 画像入力手段
3 重心算出手段
4 色空間設定手段
5 クエリー円錐算出手段
6 画像データベース
7 写像手段
8 計数手段
9 閾値判定手段
10 画素
11 直線
12 クエリー円錐
【技術分野】
【0001】
本発明は、大量のデータ画像の中からクエリー画像と類似する画像を抽出する画像検索方法、装置及びプログラムに関する。
【背景技術】
【0002】
画像データベースに蓄えられた大量のデータ画像の中からクエリー画像と同一又は類似する画像を抽出する方法、装置については多くの提案がなされている。例えば、特許文献1には、入力画像中の被写体の形状情報およびテクスチャ情報を抽出して、データベース中の各画像との類似度を算出し、算出された類似度に基づいて、入力画像と類似している類似画像データを検索する類似画像検索装置が開示されている。
【0003】
しかしながら、クエリー画像と大量のデータ画像の間の類似度を全て算出するのは、時間がかかるという問題がある。また、大部分のデータ画像はクエリー画像とは大きく異なるのが普通だから、全てのデータ画像について精密な検索を行うことは意味がない。そこで、簡易な方法で粗検索を行って、「クエリー画像との差異が大きいデータ画像」を精密検索の対象から排除して、残ったデータ画像に対して精密検索を行うことが行われている。
【0004】
例えば、特許文献2には、一枚の画像中で使用されている代表色を予め抽出して色空間上にマッピングしておき、画像検索の際に入力して描いた問い合わせ画像の中で使用されている色情報を前記色空間上に投影した後にその近傍にマッピングされている画像に対してのみ整合・評価を行う画像検索方法が開示されている。
【0005】
【特許文献1】特開2005−243178号公報
【特許文献2】特開平6−243178号公報
【発明の開示】
【発明が解決しようとする課題】
【0006】
特許文献2に記載の発明は、色空間上にマッピングされたデータ画像の代表色とクエリー画像の色情報の遠近に基づいて粗検索を行った後で、精密検索を行うので、画像検索の高速化が期待できる。しかしながら、代表色の選び方によって、検索漏れが生じるおそれがある。すなわち、代表色はデータ画像の特定の領域の色であるが、クエリー画像の特徴が当該特定の領域にはない場合はクエリー画像に類似するデータ画像を抽出できないという問題が生じる。
【0007】
本発明は、上記の課題に鑑みてなされたものであり、大量のデータ画像の中からクエリー画像に類似する画像を漏れなく抽出する画像検索方法、装置を提供するものである。
【課題を解決するための手段】
【0008】
本発明に係る画像検索方法の第1の構成は、データ画像に属する画素を3次元の色空間に写像する写像ステップと、前記色空間に写像されたクエリー画像に属する全ての画素の集合の重心と前記色空間の原点を通る直線を回転軸とし、前記原点を頂点とする円錐であって、前記クエリー画像に属する全ての画素をその内側の領域に包含する最小の円錐(以下クエリー円錐と言う。)の外側の領域に存在する前記データ画像の画素の数(以下、「画素の数」と言う。)を計数する計数ステップと、前記画素の数が所定の閾値より小さい場合に前記データ画像を前記クエリー画像に近似する画像と判定する閾値判定ステップとを有するものである。
【0009】
この構成によれば、円錐という比較的単純な立体図形を用いて領域を設定し、データ画像の画素がその領域に属すか否かという単純な論理で検索を行うので、高速検索が可能になる。
【0010】
本発明に係る画像検索方法の第2の構成は、前記第1の構成において、第1の色空間に写像されたクエリー画像の全ての画素の集合の重心を算出する重心算出ステップと、前記第1の色空間の原点を原点とし、前記重心と前記第1の色空間の原点を結ぶ直線を第1の座標軸とする第2の色空間を定義する色空間設定ステップと、前記第2の色空間において、クエリー円錐の頂角と高さを算出するクエリー円錐算出ステップとを有し、前記写像ステップは前記データ画像を前記第2の色空間に写像することを特徴とする。
【0011】
この構成によれば、データ画像をクエリー円錐の回転軸を座標軸とする座標系で定義される空間に写像するので、前記データ画像の画素がクエリー円錐の領域のどちら側にあるかを判定する演算が簡単になる。
【0012】
本発明に係る画像検索方法の第3の構成は、前記第2の構成において、前記第2の色空間は、直交座標系で定義される3次元色空間であることを特徴とする。
【0013】
この構成によれば、前記データ画像の写像は線形変換のみで行えるので、演算がさらに簡単になる。
【0014】
本発明に係る画像検索方法の第4の構成は、前記第2の構成において、前記第2の色空間は、円筒座標系で定義される3次元色空間であることを特徴とする。
【0015】
この構成によれば、円筒座標系でクエリー円錐の領域を記述するので、前記データ画像の画素がクエリー円錐の領域のどちら側にあるかを計算する演算が、さらに簡単になる。
【0016】
本発明に係る画像検索装置の第1の構成は、データ画像に属する画素を3次元の色空間に写像する写像手段と、前記色空間に写像されたクエリー画像に属する全ての画素の集合の重心と前記色空間の原点を通る直線を回転軸とし、前記原点を頂点とする円錐であって、前記クエリー画像に属する全ての画素をその内側の領域に包含する最小の円錐(以下クエリー円錐と言う。)の外側の領域に存在する前記データ画像の画素の数(以下、「画素の数」と言う。)を計数する計数手段と、前記画素の数が所定の閾値より小さい場合に前記データ画像を前記クエリー画像に近似する画像と判定する閾値判定手段とを備えるものである。
【0017】
本発明に係る画像検索装置の第2の構成は、前記第1の構成において、第1の色空間に写像されたクエリー画像の全ての画素の集合の重心を算出する重心算出手段と、前記第1の色空間の原点を原点とし、前記重心と前記第1の色空間の原点を結ぶ直線を第1の座標軸とする第2の色空間を定義する色空間設定手段と、前記第2の色空間において、クエリー円錐の頂角と高さを算出するクエリー円錐算出手段とを備え、前記写像手段は前記データ画像を前記第2の色空間に写像することを特徴とする。
【0018】
本発明に係る画像検索装置の第3の構成は、前記第2の構成において、前記第2の色空間は、直交座標系で定義される3次元色空間であることを特徴とする。
【0019】
本発明に係る画像検索装置の第4の構成は、前記第2の構成において、前記第2の色空間は、円筒座標系で定義される3次元色空間であることを特徴とする請求項2に記載の画像検索装置。
【0020】
本発明に係るプログラムは、前記第1乃至第4の構成に係る画像検索方法をコンピュータに実行させることを特徴とする。
【発明の効果】
【0021】
以上説明したように、本発明によれば、大量のデータ画像の中からクエリー画像に類似する画像を漏れなく、高速で抽出することができる。
【発明を実施するための最良の形態】
【0022】
以下、本発明を実施するための最良の形態について、図面を参照しながら説明する。
【実施例】
【0023】
〔画像検索装置〕
図1は、本発明の実施例に係る画像検索装置の概念的な構成図であり、画像検索装置1は画像入力手段2、重心算出手段3、色空間設定手段4、クエリー円錐算出手段5、画像データベース6、写像手段7、計数手段8および閾値判定手段9から構成される。
【0024】
画像入力手段2は、画像検索のためのクエリー画像を入力するインターフェイスである。クエリー画像はデジタルカメラ等の撮像手段から直接入力される他、記録媒体からの入力、通信回線等を経由する他の情報機器から入力などの入力形態を選択することができる。また、画像入力手段2は画像データベース6に記憶されるデータ画像の入力にも使用される。
【0025】
重心算出手段3は、RGB空間に写像された前記クエリー画像に属する全ての画素の重心CGを算出する手段である。なお、重心算出の具体的な手法は後述する。
【0026】
色空間設定手段4は、前記RGB空間の座標原点を原点とし、前記座標原点と前記重心を結ぶ直線を第1の座標軸とする新たな座標系によって定義される新たな色空間を設定する手段である。なお、色空間設定の具体的な手法は後述する。
【0027】
クエリー円錐算出手段5は、クエリー円錐の高さと頂角を算出する手段である。本明細書において、クエリー円錐とは前記新たな色空間において、前記新たな色空間に写像された前記クエリー画像に属する全ての画素の集合の重心と前記新たな色空間の原点を通る直線を回転軸とし、前記原点を頂点とする円錐であって、前記クエリー画像に属する全ての画素をその内側の領域に包含する最小の円錐を言う。前記クエリー円錐と前記新たな座標系の定義によれば、前記クエリー円錐の頂点は常に前記新たな座標系の原点にあって、前記クエリー円錐の回転軸は常に前記新たな座標系の前記第1の座標軸に一致するから、高さと頂角を算出すれば、前記新たな色空間において前記クエリー円錐を一意に決定することができる。なお、クエリー円錐算出の具体的な手法は後述する。
【0028】
画像データベース6は、検索対象の画像データを記憶して、適宜読み出せるようにした記憶手段である。
【0029】
計数手段8は、画像データベース6から読み出した前記画像データに属する画素の集合を前記新たな色空間に写像して、前記写像された画素の内、前記クエリー円錐の外側の領域に存在する画素を計数する手段である。
【0030】
閾値判定手段9は、計数手段8で計数した画素数を所定の閾値で判別して、前記画素数が前記閾値を下回る場合に、当該データ画像をクエリー画像に近似する画像であると判定する手段である。なお、判定結果は図示しない出力装置に出力される。
【0031】
画像検索装置1はコンピュータに画像入力手段2、重心算出手段3、色空間設定手段4、クエリー円錐算出手段5、写像手段7、計数手段8および判定手段9の処理手順を記述したプログラムをインストールし、当該コンピュータの記憶装置に画像データベース6を備えることで実現できる。前記コンピュータは、既成のパーソナルコンピュータ等の中から適当な機種を選択すれば良いが、専用のハードウェアを設計して、ボードあるいはチップに纏めてもよい。
【0032】
〔画像検索方法〕
図1は本発明の実施例に係る画像検索方法を示すフローチャートであり、図2はRGB空間に写像したクエリー画像に属する画素の集合を示す図であり、図3は、前記画素の集合の重心を説明する図であり、図4は、新たな色空間とクエリー円錐を説明する図である。以下、図2に付したステップ番号を追いながら、本発明の実施例に係る画像検索方法を説明する。また、図1及び図3乃至図5に付した符号も適宜引用する。
【0033】
〔ステップ1〕クエリー画像を読み込む。
【0034】
〔ステップ2〕前記クエリー画像に属する全ての画素の集合をRGB色空間に写像し、RGB色空間における前記画素の集合の重心を算出する。ここで、RGB色空間とは、画素の赤(R)、緑(G)および青(B)の各色成分の輝度を直交3軸の座標系の各軸に取る色空間であり、前記クエリー画像に属する画素10は、図3に示すように、RGB空間上に分布する。
【0035】
RGB色空間に写像された前記クエリー画像に属する画素10をPi(Ri,Gi,Bi)で表すことにすると、RGB色空間に写像された前記クエリー画像に属する全ての画素の集合{Pi|i=1,2…,N}の重心CGの座標(RG,GG,BG)は下記の式(1)で得られる。
【0036】
【数1】
【0037】
〔ステップ3〕重心CGの座標(RG,GG,BG)が決定すると、図4に示すように、RGB色空間の座標原点Oと重心CGを結ぶ直線11が決定するので、直線11を基準とする新らたな座標系に基づく色空間を設定する。ここでは、つぎのルールによって新たな直交座標系XYZを設定する。
【0038】
(1)RGB色空間の座標原点Oを直交座標系XYZの座標原点とする。
(2)直線11をZ軸にする。
(3)前記座標原点を通る直線であって、RB平面内にあって、Z軸に直交する直線をX軸にする。
(4)Z軸およびX軸に直交する直線をY軸にする。
(5)前記座標原点から重心CGに向かう方向をZ軸の正の方向に決め、他の軸の正の方向は3軸が右手系になるように決める。
以上のようにして、図4に示すような新たな直交座標系XYZが設定される。
【0039】
なお、新たな座標系は上記のような座標系には限られない、例えば、直線11を回転軸とする円筒座標を新たな座標系とすれば、後述するクエリー円錐の取り扱いに便利である。
【0040】
〔ステップ4〕次に、直交座標系XYZにおいて、クエリー円錐12の高さhと、頂角θを算出する。クエリー円錐12の頂点と回転軸は、定義により、直交座標系XYZの座標原点とZ軸に一致するので、高さhと頂角θが決定されれば、直交座標系XYZにおいてクエリー円錐12を一意に決定することができる。
【0041】
そこで、まずRGB色空間上のクエリー画像に属する全ての画素の集合{Pi|i=1,2…,N}を、直交座標系XYZで定義される新たな色空間に写像した画素の集合{P'i|i=1,2…,N}を求める。画素P'iの座標を(Xi,Xi,Zi)と置くと、クエリー円錐12の高さhと、頂角θは、次の式(2)及び式(3)によって算出できる。
【0042】
【数2】
【0043】
〔ステップ5〕データ画像データベース6からデータ画像を読み出す。
【0044】
〔ステップ6〕前記データ画像に属する全ての画素の集合を直交座標系XYZで定義される新たな色空間に写像して、画素の集合{Qj|j=1,2…,M}を求める。
【0045】
〔ステップ7〕さらに、集合{Qj|j=1,2…,M}に属する画素の内、クエリー円錐12の外側の領域に存在する画素の数を計数する。ここで、画素Qjの座標を(X'j,Y'j,Z'j)とすると、下記の式(4)又は式(5)のいずれかを満たす場合に画素Qjはクエリー円錐12の外側の領域に存在する。
【0046】
【数3】
【0047】
〔ステップ8〕前ステップで計数した画素の数を、所定の閾値と較べて、前記画素の数が前記閾値よりも小さければ当該データ画像はクエリー画像に近似する画像であると判断する。なお、前記閾値は、検索対象の画像の特性(例えば、データ画像相互の分散の大きさ)あるいは目的(精密検索か、粗検索か)に応じて、適当な値を与える。また、前記閾値は絶対値で設定してもよいし、相対値(例えば、データ画像に属する画素の総数Mに対する比率)で設定してもよい。
【0048】
〔ステップ9〕全てのデータ画像を読み出していれば終了し、そうでなければステップ5に戻って検索を続ける。
【0049】
以上のように、本実施例によれば、クエリー画像に近似するデータ画像を高速で抽出することができる。なお、本発明に係る画像検索方法・装置は、独立した画像検索方法・装置として使用することもできるし、粗検索‐詳細検索の段階を踏む多段階画像検索方法・装置における粗検索ツールとして使用することもできる。
【図面の簡単な説明】
【0050】
【図1】本発明の実施例に係る実施例に係る画像検索装置の概念的な構成図である。
【図2】本発明の実施例に係る実施例に係る画像検索方法を示すフローチャートである。
【図3】RGB空間に写像したクエリー画像に属する画素の集合を示す図である。
【図4】前記画素の集合の重心を説明する図である。
【図5】新たな色空間とクエリー円錐を説明する図である。
【符号の説明】
【0051】
1 画像検索装置
2 画像入力手段
3 重心算出手段
4 色空間設定手段
5 クエリー円錐算出手段
6 画像データベース
7 写像手段
8 計数手段
9 閾値判定手段
10 画素
11 直線
12 クエリー円錐
【特許請求の範囲】
【請求項1】
データ画像に属する画素を3次元の色空間に写像する写像ステップと、 前記色空間に写像されたクエリー画像に属する全ての画素の集合の重心と前記色空間の原点を通る直線を回転軸とし、前記原点を頂点とする円錐であって、前記クエリー画像に属する全ての画素をその内側の領域に包含する最小の円錐(以下クエリー円錐と言う。)の外側の領域に存在する前記データ画像の画素の数(以下、「画素の数」と言う。)を計数する計数ステップと、
前記画素の数が所定の閾値より小さい場合に前記データ画像を前記クエリー画像に近似する画像と判定する閾値判定ステップと
を有する画像検索方法。
【請求項2】
第1の色空間に写像されたクエリー画像の全ての画素の集合の重心を算出する重心算出ステップと、
前記第1の色空間の原点を原点とし、前記重心と前記第1の色空間の原点を結ぶ直線を第1の座標軸とする第2の色空間を定義する色空間設定ステップと、
前記第2の色空間において、クエリー円錐の頂角と高さを算出するクエリー円錐算出ステップとを有し、
前記写像ステップは前記データ画像を前記第2の色空間に写像すること
を特徴とする請求項1に記載の画像検索方法。
【請求項3】
前記第2の色空間は、直交座標系で定義される3次元色空間であることを特徴とする請求項2に記載の画像検索方法。
【請求項4】
前記第2の色空間は、円筒座標系で定義される3次元色空間であることを特徴とする請求項2に記載の画像検索方法。
【請求項5】
データ画像に属する画素を3次元の色空間に写像する写像手段と、
前記色空間に写像されたクエリー画像に属する全ての画素の集合の重心と前記色空間の原点を通る直線を回転軸とし、前記原点を頂点とする円錐であって、前記クエリー画像に属する全ての画素をその内側の領域に包含する最小の円錐(以下クエリー円錐と言う。)の外側の領域に存在する前記データ画像の画素の数(以下、「画素の数」と言う。)を計数する計数手段と、
前記画素の数が所定の閾値より小さい場合に前記データ画像を前記クエリー画像に近似する画像と判定する閾値判定手段と
を備える画像検索装置。
【請求項6】
第1の色空間に写像されたクエリー画像の全ての画素の集合の重心を算出する重心算出手段と、
前記第1の色空間の原点を原点とし、前記重心と前記第1の色空間の原点を結ぶ直線を第1の座標軸とする第2の色空間を定義する色空間設定手段と、
前記第2の色空間において、クエリー円錐の頂角と高さを算出するクエリー円錐手段とを備え、
前記写像手段は前記データ画像を前記第2の色空間に写像することを特徴とする請求項1に記載の画像検索装置。
【請求項7】
前記第2の色空間は、直交座標系で定義される3次元色空間であることを特徴とする請求項2に記載の画像検索装置。
【請求項8】
前記第2の色空間は、円筒座標系で定義される3次元色空間であることを特徴とする請求項2に記載の画像検索装置。
【請求項9】
請求項1乃至請求項4に記載の画像検索方法をコンピュータに実行させることを特徴とするプログラム。
【請求項1】
データ画像に属する画素を3次元の色空間に写像する写像ステップと、 前記色空間に写像されたクエリー画像に属する全ての画素の集合の重心と前記色空間の原点を通る直線を回転軸とし、前記原点を頂点とする円錐であって、前記クエリー画像に属する全ての画素をその内側の領域に包含する最小の円錐(以下クエリー円錐と言う。)の外側の領域に存在する前記データ画像の画素の数(以下、「画素の数」と言う。)を計数する計数ステップと、
前記画素の数が所定の閾値より小さい場合に前記データ画像を前記クエリー画像に近似する画像と判定する閾値判定ステップと
を有する画像検索方法。
【請求項2】
第1の色空間に写像されたクエリー画像の全ての画素の集合の重心を算出する重心算出ステップと、
前記第1の色空間の原点を原点とし、前記重心と前記第1の色空間の原点を結ぶ直線を第1の座標軸とする第2の色空間を定義する色空間設定ステップと、
前記第2の色空間において、クエリー円錐の頂角と高さを算出するクエリー円錐算出ステップとを有し、
前記写像ステップは前記データ画像を前記第2の色空間に写像すること
を特徴とする請求項1に記載の画像検索方法。
【請求項3】
前記第2の色空間は、直交座標系で定義される3次元色空間であることを特徴とする請求項2に記載の画像検索方法。
【請求項4】
前記第2の色空間は、円筒座標系で定義される3次元色空間であることを特徴とする請求項2に記載の画像検索方法。
【請求項5】
データ画像に属する画素を3次元の色空間に写像する写像手段と、
前記色空間に写像されたクエリー画像に属する全ての画素の集合の重心と前記色空間の原点を通る直線を回転軸とし、前記原点を頂点とする円錐であって、前記クエリー画像に属する全ての画素をその内側の領域に包含する最小の円錐(以下クエリー円錐と言う。)の外側の領域に存在する前記データ画像の画素の数(以下、「画素の数」と言う。)を計数する計数手段と、
前記画素の数が所定の閾値より小さい場合に前記データ画像を前記クエリー画像に近似する画像と判定する閾値判定手段と
を備える画像検索装置。
【請求項6】
第1の色空間に写像されたクエリー画像の全ての画素の集合の重心を算出する重心算出手段と、
前記第1の色空間の原点を原点とし、前記重心と前記第1の色空間の原点を結ぶ直線を第1の座標軸とする第2の色空間を定義する色空間設定手段と、
前記第2の色空間において、クエリー円錐の頂角と高さを算出するクエリー円錐手段とを備え、
前記写像手段は前記データ画像を前記第2の色空間に写像することを特徴とする請求項1に記載の画像検索装置。
【請求項7】
前記第2の色空間は、直交座標系で定義される3次元色空間であることを特徴とする請求項2に記載の画像検索装置。
【請求項8】
前記第2の色空間は、円筒座標系で定義される3次元色空間であることを特徴とする請求項2に記載の画像検索装置。
【請求項9】
請求項1乃至請求項4に記載の画像検索方法をコンピュータに実行させることを特徴とするプログラム。
【図1】

【図2】
【図3】
【図4】
【図5】
【図2】
【図3】
【図4】
【図5】
【公開番号】特開2006−268799(P2006−268799A)
【公開日】平成18年10月5日(2006.10.5)
【国際特許分類】
【出願番号】特願2005−90114(P2005−90114)
【出願日】平成17年3月25日(2005.3.25)
【出願人】(802000031)財団法人北九州産業学術推進機構 (187)
【出願人】(899000068)学校法人早稲田大学 (602)
【Fターム(参考)】
【公開日】平成18年10月5日(2006.10.5)
【国際特許分類】
【出願日】平成17年3月25日(2005.3.25)
【出願人】(802000031)財団法人北九州産業学術推進機構 (187)
【出願人】(899000068)学校法人早稲田大学 (602)
【Fターム(参考)】
[ Back to top ]