
画像構成方法、指紋画像構成装置およびプログラム
【課題】 スイープ型指紋センサ上での指のスライド動作が一定でないときは、指紋の全体画像を構成することが困難であった。
【解決手段】 スイープ型指紋センサが読み取る最新部分画像の既得部分画像に対する差分を求めるための検定領域を、連続する複数の既得部分画像の変位方向に沿って前記既得部分画像に設定し、該既得部分画像に対する前記最新部分画像の重ね合わせ位置の検索範囲を前記検定領域の位置に基づき設定し、前記既得部分画像に対し前記最新部分画像を前記検索範囲にて変位させ、その変位ごとに前記検定領域に係る前記既得部分画像および最新部分画像の差分を求める。さらに、求めた各差分のうちの最小の差分に対応する前記最新部分画像の変位を前記重ね合わせ位置に決定し、前記既得部分画像に対する前記重ね合わせ位置に前記最新部分画像を配置して記憶する。
【解決手段】 スイープ型指紋センサが読み取る最新部分画像の既得部分画像に対する差分を求めるための検定領域を、連続する複数の既得部分画像の変位方向に沿って前記既得部分画像に設定し、該既得部分画像に対する前記最新部分画像の重ね合わせ位置の検索範囲を前記検定領域の位置に基づき設定し、前記既得部分画像に対し前記最新部分画像を前記検索範囲にて変位させ、その変位ごとに前記検定領域に係る前記既得部分画像および最新部分画像の差分を求める。さらに、求めた各差分のうちの最小の差分に対応する前記最新部分画像の変位を前記重ね合わせ位置に決定し、前記既得部分画像に対する前記重ね合わせ位置に前記最新部分画像を配置して記憶する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、指紋の照合処理に用いる指紋画像を生成する技術に関し、特に、スライド動作する指から指紋を表す一連の部分画像を読み取るセンサ機構を用い、その一連の部分画像から指紋の全体画像を構成する技術に関する。
【背景技術】
【0002】
従来、指紋画像を読み取るセンサ機構の一種に、いわゆるスイープ(sweep)型指紋センサがある。このスイープ型指紋センサは、横幅が指とほぼ同じで、縦の長さが指紋全体よりも短いセンサ面を持ち、この面上を概略一方向に移動する指から指紋の部分画像を連続的に取得する機構である。スイープ型指紋センサの一回の読み取りタイミングにて取得できる画像サイズは、指紋全体のうちの一部分であるため、指紋全体の画像を取得するには、順次読み取られる複数の部分画像を繋ぎ合わせて全体画像に構成する必要がある。
【0003】
指紋の部分画像から全体画像を構成するにあたっては、例えば、連続的な2つの部分画像を徐々にずらして重ね、重なり合う部分における両画像間の差分に基づいて、両画像の重ね合わせ位置を決定するという方法がある。この方法では、両画像の差分を求める際の計算を高速に行うために、差分の算出対象を、部分画像の一部分である検定領域に限定するという方法が採られる。
【0004】
上述の検定領域のような画像領域を決定する従来の方法として、例えば、後述の特許文献1に記載のものがある。特許文献1に記載の方法は、入力画像における、前画像との重なりが予想される所定の領域を注目領域とし、この注目領域から上記検定領域に相当する特徴領域を検出する。そして、この特徴領域に最も類似する類似領域を前画像から検出し、検出した類似領域と入力画像の特徴領域とが一致するように両画像を合成するというものである。
【特許文献1】特開2003−208620号公報
【発明の開示】
【発明が解決しようとする課題】
【0005】
しかしながら、上記特許文献1に記載の方法にあっては、注目領域、すなわち入力画像において前画像と重なり合うと予想される領域が、いずれの入力画像に対しても同じ位置に設定されることから、指が所定の一方向にスライドしたときに限り、入力画像を適正に重ね合わせることが可能となる。よって、例えば、指が規定の方向とは逆方向にスライドした場合、上記方法では、入力画像の注目領域が前画像に対応しないという事態が生じ、結果、入力画像を前画像に重ね合わせることができない。また、例えばセンサ上で指が一方向に滑らかにスライドしないとき、実際には、指が瞬時的に逆行するような動きとなるが、このような場合も、上述と同様な事態が生じることから、適正な全体指紋画像を構成することが困難となる。
【0006】
本発明は、上記課題に鑑みてなされたものであり、指紋の全体画像を構成する際に指のスライド方向の影響を受け難い画像構成方法を提供することを目的とする。
【課題を解決するための手段】
【0007】
本発明に係る画像構成方法は、スライド動作する指からその指紋を表す一連の部分画像を読み取るセンサ機構を具備する装置が、前記センサ機構が読み取る部分画像を順次記憶し、該順次記憶する部分画像における最新部分画像の既得部分画像に対する差分量を求めるための検定領域を、連続する複数の既得部分画像の変位方向に沿って前記既得部分画像に設定し、該既得部分画像に対する前記最新部分画像の重ね合わせ位置の検索範囲を前記検定領域の位置に基づき設定し、前記既得部分画像に対し前記最新部分画像を前記検索範囲にて変位させ且つ変位ごとに前記検定領域に係る前記既得部分画像および最新部分画像の差分量を求め、該求めた各差分量のうちの最小の差分量に対応する前記最新部分画像の変位を前記重ね合わせ位置に決定し、前記既得部分画像に対する前記重ね合わせ位置に前記最新部分画像を配置して記憶するという方法である。
【0008】
本発明に係る指紋画像構成装置は、スライド動作する指からその指紋を表す一連の部分画像を読み取るセンサ機構と、該センサ機構が読み取った一連の部分画像を順次記憶するメモリ機構と、該メモリ機構が記憶した一連の部分画像の構成処理を行う制御機構とを備え、前記制御機構は、前記メモリ機構が順次記憶する部分画像における最新部分画像の既得部分画像に対する差分量を求めるための検定領域を、連続する複数の既得部分画像の変位方向に沿って前記既得部分画像に設定し、該既得部分画像に対する前記最新部分画像の重ね合わせ位置の検索範囲を前記検定領域の位置に基づき設定する検索条件決定部と、前記既得部分画像に対し前記最新部分画像を前記検索範囲にて変位させ且つ変位ごとに前記検定領域に係る前記既得部分画像および最新部分画像の差分量を求める差分演算部と、前記差分量演算部が求めた各差分量のうちの最小の差分量に対応する前記最新部分画像の変位を前記重ね合わせ位置に決定する位置関係演算部と、前記メモリ機構において前記既得部分画像に対する前記重ね合わせ位置に前記最新部分画像を配置する画像配置部とを有する。
【0009】
本発明に係るプログラムは、スライド動作する指からその指紋を表す一連の部分画像を読み取るセンサ機構に接続されたコンピュータに、前記センサ機構が読み取る部分画像を順次記憶し、該順次記憶する部分画像における最新部分画像の既得部分画像に対する差分量を求めるための検定領域を、連続する複数の既得部分画像の変位方向に沿って前記既得部分画像に設定し、該既得部分画像に対する前記最新部分画像の重ね合わせ位置の検索範囲を前記検定領域の位置に基づき設定し、前記既得部分画像に対し前記最新部分画像を前記検索範囲にて変位させ且つ変位ごとに前記検定領域に係る前記既得部分画像および最新部分画像の差分量を求め、該求めた各差分量のうちの最小の差分量に対応する前記最新部分画像の変位を前記重ね合わせ位置に決定し、前記既得部分画像に対する前記重ね合わせ位置に前記最新部分画像を配置して記憶することを実行させる。
【発明の効果】
【0010】
本発明によれば、指紋の全体画像の構成処理において、既得部分画像および最新部分画像の差分を求めるための検定領域を、複数の既得部分画像の変位方向に沿って設定することから、センサ機構における指のスライド方向に制限を与え難いというメリットがある。また、たとえ指の移動速度が局所的に速くなる等の変動があっても、その変動に対処し易いという効果を奏する。
【発明を実施するための最良の形態】
【0011】
[実施例]
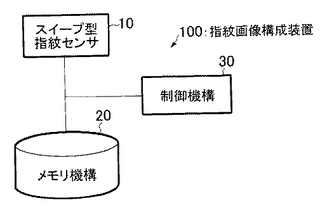
以下、本発明の実施例について図面を用いて詳細に説明する。図1は、本発明による実施例の指紋画像構成装置の構成を示すブロック図である。実施例の指紋画像構成装置100は、指紋を表す一連の部分画像を読み取るセンサ機構であるスイープ型指紋センサ10と、該センサ10が読み取る部分画像を記憶するメモリ機構20と、該メモリ機構20が記憶した一連の部分画像から全体画像を構成する構成処理を行う制御機構30とを備える。
【0012】
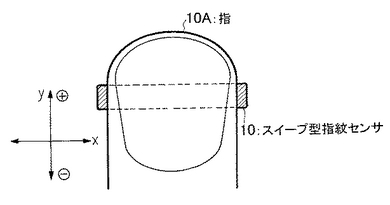
スイープ型指紋センサ10の概観を図2に示す。スイープ型指紋センサ10は、図示のx方向の幅が指10Aとほぼ同じであり、y方向の長さが指10Aの指紋全体の長さ、すなわち第一関節から指先までの長さよりも短いセンサ面を持ち、この面上で概略y方向にスライドする指10Aからその指紋の部分画像を連続的に読み取る。
【0013】
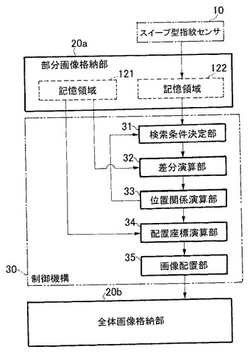
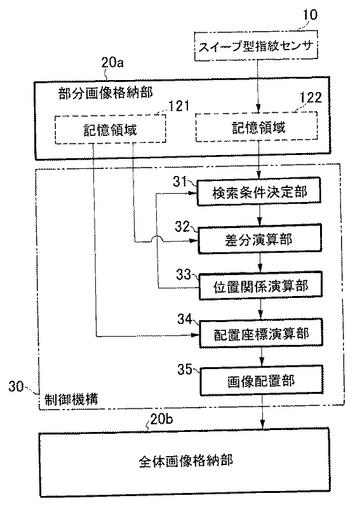
図3に、指紋画像構成装置100の機能的な構成ブロックを示す。図示の部分画像格納部20aおよび全体画像格納部20bは、それぞれメモリ機構20に割り当てられた記憶領域である。前者の部分画像格納部20aは、スイープ型指紋センサ10から順次入力される部分画像を格納し、後者の全体画像格納部20bは、後述の制御機構30での構成処理を経て形成される指紋の全体画像を格納する。
【0014】
部分画像格納部20aは、複数の部分画像を格納可能な容量を有し、図示の例では、部分画像2つ分を格納するための記憶領域121および記憶領域122を有する。スイープ型指紋センサ10から入力された最新部分画像は、記憶領域122に格納され、この最新部分画像の前画像に相当する既得部分画像、すなわち現時点から2番目に新しい部分画像が記憶領域121に格納される。
【0015】
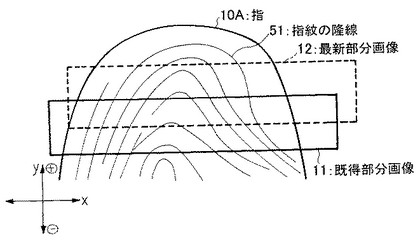
ここで、記憶領域121および記憶領域122に格納される部分画像の例を図4に示す。図示の指10Aに記された曲線は指紋の隆線51を表し、メモリ機構20には、スイープ型指紋センサ10の読み取りタイミングごとに、同図に実線または点線にて示す矩形の部分画像が1つずつ入力される。図示の例では、実線の矩形は、記憶領域121に格納された既得部分画像11を示し、この既得部分画像11に続いて読み取られて記憶領域122に格納された最新部分画像12が点線の矩形にて示されている。
【0016】
図4において既得部分画像11および最新部分画像12の位置がずれているのは、入力ごとに指10Aとスイープ型指紋センサ10との相対的な位置がずれていくことを示す。また、これらの両画像11および12の位置関係は、図2に示す指10Aが、スイープ型指紋センサ10に対しy軸のマイナス(−)方向にスライドしたことを示す。
【0017】
図3に示す制御機構30の機能構成は、記憶領域121の既得部分画像に、記憶領域122の最新部分画像を重ね合わせる構成処理を担うものである。検索条件決定部31は、後述の位置関係演算部33から供給される相対位置関係の情報を記憶し、過去の直近の部分画像の変位方向に応じて、最新部分画像の構成処理に用いるべき検定領域の位置と、この検定領域に対応する変位の検索範囲とを決定する。
【0018】
差分演算部32は、基準となる部分画像、すなわち記憶領域121の既得部分画像と、処理対象の部分画像である記憶領域122の最新部分画像との差分を、検索条件決定部31から出力された検定領域および変位の検索範囲に基づいて計算し、算出結果の変位と差分との組み合わせを出力する。
【0019】
位置関係演算部33は、差分演算部32から出力された変位および差分の組み合わせに基づき、既得部分画像に対する最新部分画像の重ね合わせ位置を決定する。この決定においては、最新部分画像が既得部分画像に対して相対的にどのような位置関係にあるかを求める。上述した検索条件決定部31が記憶する相対位置関係の情報とは、この位置関係演算部33が求めた重ね合わせ位置の情報である。
【0020】
配置座標演算部34は、位置関係演算部33が算出した相対位置関係と、前回配置した部分画像の配置座標とから、部分画像格納部20aの最新部分画像が全体画像格納部20b内で取るべき配置座標を算出する。算出した配置座標は、次回の演算に備えて内部に記憶する。画像配置部35は、配置座標演算部34の算出結果にしたがって、最新部分画像を全体画像格納部20bに配置する。
【0021】
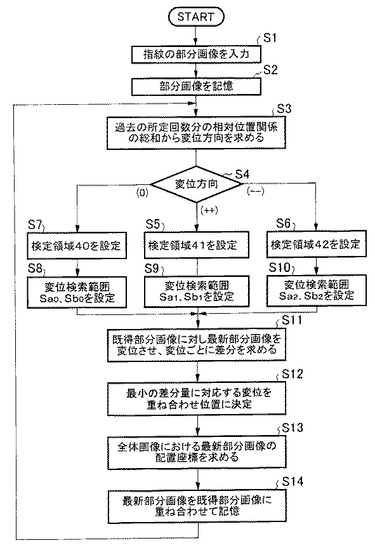
図4に示すフローチャートに沿って、指紋画像構成装置100の動作手順を説明する。スイープ型指紋センサ10にて指10Aがスライドし、部分画像が入力されるごとに(ステップS1)、メモリ機構20は、図4に示すような最新部分画像12を記憶領域122に記憶する(ステップS2)。このとき、他方の記憶領域121には、最新部分画像12の前画像である既得部分画像11が記憶される。以下、制御機構30が行う構成処理の一例として、図4に示す既得部分画像11に最新部分画像12を重ね合わせる手順を説明する。
【0022】
検索条件決定部31は、今回の構成処理対象となる最新部分画像12に用いるべき検定領域および変位の検索範囲を設定する。検定領域とは、既得部分画像11に対する最新部分画像12の差分の算出対象となる領域を指し、この検定領域は、既得部分画像11に対し設定される。また、変位の検索範囲とは、既得部分画像11に対する最新部分画像12の重ね合わせ位置を決定するために、既得部分画像11上で最新部分画像12を変位させるy軸方向の範囲を指す。
【0023】
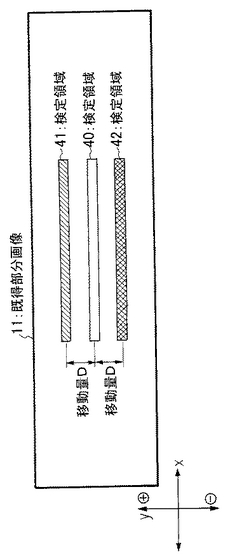
図6および図7を用いて、まず、検定領域の決定方法を説明する。図6は、説明のため、3つの検定領域40、41および42を一括的に既得部分画像11上に示したものである。検定領域40は、既得部分画像11におけるy軸上の中央部にあり、この中央部からy軸のプラス(+)方向に沿って所定の移動量Dの間隔を置いた位置に検定領域41がある。また、中央部からy軸のマイナス(−)方向に沿って同移動量Dの間隔を置いた位置に検定領域42がある。検索条件決定部31は、過去に読み取った数回分の部分画像の変位量の総和を求め、求めた総和の符号に基づき当該直近の部分画像の変位方向を判定する(図5:ステップS3)。そして、判定した変位方向に応じて、図6の3つの検定領域の中から1つを選定する(ステップS4)。
【0024】
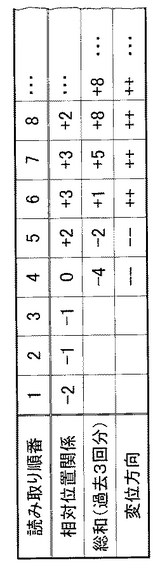
検定領域の選定について、図7を用いて具体的に説明する。ここでは、スイープ型指紋センサ10が順次読み取る部分画像間の相対位置関係に関する情報が、図7に示すような一覧に記録されているとする。図示の一覧には、スイープ型指紋センサ10の「読み取り順番」と、後述の位置関係演算部33が算出した部分画像間の変位量である「相対位置関係」と、現時点から過去数回分の「相対位置関係」の「総和」と、「総和」の符号に準じた「変位方向」とが示されている。図示の例では、直近の過去3回分の移動加算値が現時点の「総和」として記録されており、例えば、読み取り順番「4」の総和「−4」は、直近の読み取り順番「1」〜「3」の相対位置関係「−2」、「−1」及び「−1」の総和に対応する。
【0025】
検索条件決定部31は、相対位置関係の総和の符号、すなわち図7の「変位方向」の記録が正(++)である場合、図6の既得部分画像11の中央部からy軸のプラス方向にある検定領域41を採用し(図5:ステップS5)、変位方向が負(--)である場合は、y軸のマイナス方向にある検定領域42を採用する(ステップS6)。なお、図7に示す一覧には存在しないが、仮に、総和がゼロの場合は、図6の既得部分画像11の中央部にある検定領域40を採用する(ステップS7)。
【0026】
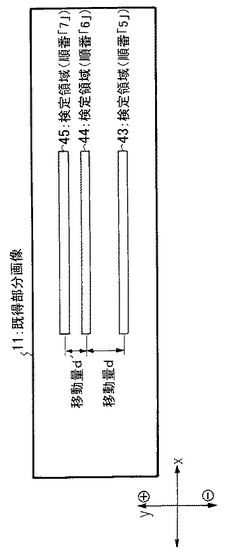
上述の方法では、図6に示す移動量Dが固定値であるが、この移動量Dを、例えば過去の「相対位置関係」の変動レベルに応じて設定するという方法により、可変にしてもよい。具体的には、図7の記録において、例えば現時点の読み取り順番が「7」であるときに、過去の読み取り順番「4」〜「6」の相対位置関係の移動差に着目する。図7から分かるように、「4」及び「5」間の相対位置関係の差分は「2」であり、続く「5」及び「6」間の差分は「1」であることから、検索条件決定部31は、読み取り順番「4」から「6」への遷移においては、相対位置関係の変動レベルが小さくなる傾向にあると判断する。
【0027】
上記判断のもとに、現時点の読み取り順番「7」における検定領域の位置は、前回の読み取り順番「6」のときに設定した検定領域の位置から、この順番「6」のときに採用した移動量dよりも小さい移動量d´の間隔を置いた位置に決定する。これを図8を用いて更に説明すると、現時点の読み取り順番「7」の検定領域45は、前回の読み取り順番「6」の検定領域44からプラス方向に沿って移動量d´の間隔を置いて設定されるが、この移動量d´は、前々回の読み取り順番「5」の検定領域43からの移動量dよりも小さい値になるということである。なお、仮に、相対位置関係の変動レベルが大きくなる傾向にあるときは、前回の移動量よりも大きな量を今回の移動量に設定する。上記説明した方法によれば、直近の部分画像が成す相対位置関係の変動レベルを考慮した変位検索範囲を設定することができる。
【0028】
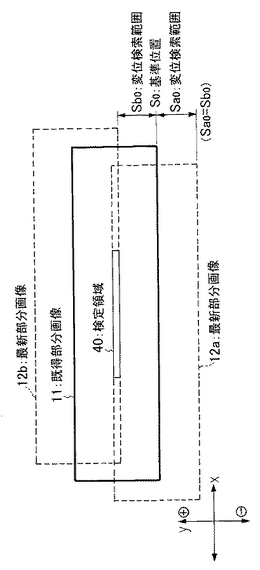
次に、検索条件決定部31は、上述のような手順で決定した検定領域の位置に基づいて、既得部分画像11に対する最新部分画像12の重ね合わせ位置を検索するための変位検索範囲を設定する。図9に、図6の検定領域40に対する変位検索範囲Sa0及びSb0を示す。変位検索範囲Sa0及びSb0は、図9に示すように、既得部分画像11の検定領域40と、既得部分画像11上にて変位する最新部分画像12とが重なり合う範囲である。
【0029】
図9を用いて、上記の変位検索範囲の設定原理を説明すると、既得部分画像11上で最新部分画像12を図示の基準位置S0からy軸に沿ってプラスまたはマイナス方向に徐々に変位させたとき、既得部分画像11の検定領域40と最新部分画像12とを重ねるには、マイナス方向の変位では、図9に点線にて示す最新部分画像12aの位置が限界であり、プラス方向の変位では、同図の最新部分画像12bの位置が限界となる。検索条件決定部31は、これらの限界の位置と基準位置S0とから得られるy軸上の範囲を、それぞれ変位検索範囲Sa0及びSb0として設定する(図5:ステップS8)。図9の例では、検定領域40が既得部分画像11の中央部にあることから、マイナス方向の変位検索範囲Sa0およびプラス方向の変位検索範囲Sb0は同量となる(Sa0=Sb0)。
【0030】
また、検索条件決定部31は、既得部分画像11に検定領域41が設定されているときは、図10に示す変位検索範囲Sa1及びSb1を設定し(図5:ステップS9)、既得部分画像11に検定領域42が設定されているときは、図11に示す、変位検索範囲Sa2及びSb2を設定する(図5:ステップS10)。
【0031】
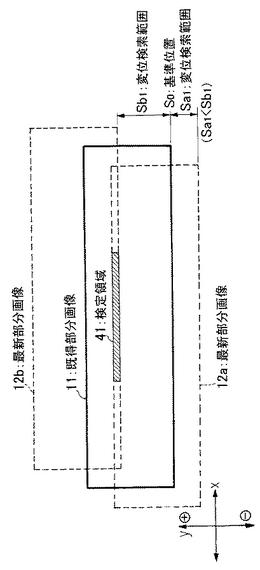
検定領域41の場合、図10に示すように、この検定領域41が既得部分画像11の中央部からy軸のプラス方向に沿った箇所に配置されていることから、マイナス方向の変位検索範囲Sa1よりも、プラス方向の変位検索範囲Sb1のほうが大きい(Sa1<Sb1)。すなわち、順次読み取られる部分画像の相対位置関係が、y軸のプラス方向に遷移する傾向にあるとき、図10に示すように、マイナス方向の検索範囲よりもプラス方向のほうが大きく設定されることとなる。これは、後に差分演算部14において、既得部分画像11に対する最新部分画像12の重ね合わせ位置を検索する際、プラス方向の検索に有利に作用する。
【0032】
さらに説明すると、検定領域41に対する図10の変位検索範囲Sa1及びSb1と、既得部分画像11の中央部に設定された検定領域40に対する図9の変位検索範囲Sa0及びSb0との関係は、「Sa1=Sa0−D」および「Sb1=Sb0+D」で表すことができる。後者の「Sb1=Sb0+D」は、検定領域41を採用したとき、検定領域40を採用したときに比べて、移動量「D」の分、y軸プラス方向の変位検索範囲が拡大することを意味する。よって、仮に、最新部分画像12が既得部分画像11に対しプラス方向に大きく遷移する、すなわち指のスライドが急に速くなったとしても、上記の検定領域41を採用することにより、プラス方向の上記変動に対処し易くなる。
【0033】
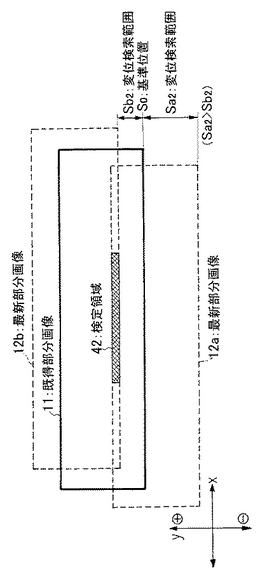
また逆に、部分画像の相対位置関係がy軸のマイナス方向に遷移する傾向にあるときに設定される検定領域42に対しては、図11に示すように、プラス方向の変位検索範囲Sb2よりも、マイナス方向の変位検索範囲Sa2が大きくなる(Sa2>Sb2)。このことは、その後の差分演算部32による重ね合わせ位置の検索の際、マイナス方向の検索に有利に作用する。
【0034】
指の移動速度は連続的に変化するため、直近に算出された部分画像間の相対位置関係と、現在算出しようとしている相対位置関係との間には強い相関がある。以上で述べた検索条件の決定方法は、この事実に基づいている。
【0035】
なお、指紋画像の構成処理の初期においては、読み取った部分画像の数量が少ないため、直近の既得部分画像の変位方向を判定し難い。よって、処理の初期は、変位方向の判定に必要な数量、例えば読み取り開始から3回分、の読み取りを終えるまでは、検定領域を既得部分画像11の中央部に配置した図9に示す検索条件を固定的に採用してもよい。これは、変位方向が不明の初期段階においては、差し当たり、プラス方向およびマイナス方向のいずれの変位にも対処し易くするという考えに基づく。
【0036】
検索条件決定部31が上述の検定領域および変位検索範囲を決定するにあたっては、指が概略y方向に移動することを考慮して、上記説明した方法にてy方向についてのみ行えば本発明の効果は十分に得られるが、同様の方法でx方向についての決定を行うことも可能である。
【0037】
検索条件決定部31は、以上の方法によって決定した検定領域の位置および変位検索範囲を、今回の検索条件として差分演算部32に出力し、次回の処理に備えて、この検索条件を内部に記憶する。
【0038】
差分演算部32は、記憶領域121に格納された基準となる既得部分画像11と、記憶領域122に格納された処理対象の最新部分画像12との差分量を、検索条件決定部31から得た上記の検索条件に従って算出する。差分量の算出にあたっては、既得部分画像11と最新部分画像12とを、検索条件決定部31から出力された変位検索範囲にて変位させる、すなわち徐々にずらして重ね合わせる。そして、重ね合わせる都度、既得部分画像11の検定領域内に存在する画素の濃淡データと、対応する最新部分画像12の領域に存在する画素の濃淡データとの差分量を順次求め、求めた全画素分の差分量を総和する。この総和により得られる差分量が、1回の重ね合わせ時に求められる差分量である。
【0039】
差分演算部32は、上記の各重ね合わせ時に得られた差分量と、その時点の最新部分画像12の変位とを組み合わせて位置関係演算部33に出力する(図5:ステップS11)。なお、差分量としては、上述した各画素の濃淡データの差分の総和以外にも、差分の二乗の総和を用いることもできる。また、両部分画像における指紋隆線のベクトル分布または指紋隆線の端点および分岐点といった指紋の特徴となる点を数値化し、その数値を両部分画像間で比較することにより差分量を求めるという方法を用いても良い。
【0040】
位置関係演算部33は、差分演算部32が出力した差分量および変位の組み合わせに基づき、既得部分画像11に対する最新部分画像12の重ね合わせ位置、すなわち両画像11および12を互いに重複する箇所にて重ねるための位置を決定する。その際、位置関係演算部33は、差分演算部32から得た上記の差分量のうちの最小の差分量に着目し、この最小の差分量に対応する変位を、重ね合わせ位置に決定する(図5:ステップS12)。ここで求められた最新部分画像12の重ね合わせ位置が、例えば図7に沿って説明した「相対位置関係」の値となる。位置関係演算部33は、決定した相対位置関係を検索条件決定部31および配置座標演算部34に出力する。
【0041】
配置座標演算部34は、基準となる既得部分画像11の原点の、全体画像内における座標と、位置関係演算部33から得た相対位置関係とから、配置対象となる最新部分画像12の原点の、全体画像内における配置座標を算出する。既得部分画像11の原点の座標値は、前回の演算で記憶しておいたものである。部分画像の原点とは、スイープ型指紋センサ10が読み取る全ての部分画像に対し共通に設定される基準座標を指し、例えば、部分画像が成す矩形における特定の頂点座標などが原点として採用される。配置座標演算部34は、最新部分画像12の原点の、全体画像における座標値を画像配置部35に出力するとともに、次回の演算に備えてこの座標値を配置座標演算部34内に記憶する(図5:ステップS13)。
【0042】
最後に、画像配置部35は、配置座標演算部34が出力した座標値に基づいて、全体画像格納部20bにて最新部分画像12を既得部分画像11に重ね合わせて配置する(ステップS14)。これにより、例えば図4に示すような態様で、既得部分画像11に対し最新部分画像12が配置される。以上の処理が、スイープ型指紋センサ10による指紋の読み取りを終えるまで繰り返される。
【0043】
以上説明した実施例の指紋画像構成装置100によれば、指紋画像の構成処理において既得部分画像11に最新部分画像12を重ねるにあたり、両画像の差分を求めるための検定領域を、複数の既得部分画像の変位方向に沿って設定することから、スイープ型指紋センサ10における指のスライド方向の制限を緩和することができる。これにより、スイープ型指紋センサ10の使い勝手が向上する。
【0044】
なお、上述した制御機構30の動作手順は、コンピュータが実行するプログラムの工程に対応する。よって、上記手順に対応するプログラムを、スイープ型指紋センサ10を具備するパーソナルコンピュータあるいは携帯情報端末等の情報処理機器に導入することにより、当該機器を指紋画像構成装置100として利用することができる。
【図面の簡単な説明】
【0045】
【図1】本発明による実施例の指紋画像構成装置の構成を示すブロック図である。
【図2】実施例のスイープ型指紋センサを説明するための説明図である。
【図3】実施例の指紋画像構成装置の機能的な構成を示すブロック図である。
【図4】実施例の部分画像を説明するための説明図である。
【図5】実施例の動作手順を説明するためのフローチャートである。
【図6】実施例の検定領域の位置を説明するための説明図である。
【図7】実施例の検定領域の決定方法を説明するための説明図である。
【図8】実施例の検定領域の他の決定方法を説明するための説明図である。
【図9】実施例の変位検索範囲を説明するための説明図である。
【図10】実施例の変位検索範囲を説明するための説明図である。
【図11】実施例の変位検索範囲を説明するための説明図である。
【符号の説明】
【0046】
100 指紋画像構成装置
10 スイープ型指紋センサ
20 メモリ機構
20a:部分画像格納部、20b:全体画像格納部、121、122:記憶領域
30 制御機構
31:検索条件決定部、32:差分演算部、33:位置関係演算部、34:配置座標演算部、35:画像配置部
【技術分野】
【0001】
本発明は、指紋の照合処理に用いる指紋画像を生成する技術に関し、特に、スライド動作する指から指紋を表す一連の部分画像を読み取るセンサ機構を用い、その一連の部分画像から指紋の全体画像を構成する技術に関する。
【背景技術】
【0002】
従来、指紋画像を読み取るセンサ機構の一種に、いわゆるスイープ(sweep)型指紋センサがある。このスイープ型指紋センサは、横幅が指とほぼ同じで、縦の長さが指紋全体よりも短いセンサ面を持ち、この面上を概略一方向に移動する指から指紋の部分画像を連続的に取得する機構である。スイープ型指紋センサの一回の読み取りタイミングにて取得できる画像サイズは、指紋全体のうちの一部分であるため、指紋全体の画像を取得するには、順次読み取られる複数の部分画像を繋ぎ合わせて全体画像に構成する必要がある。
【0003】
指紋の部分画像から全体画像を構成するにあたっては、例えば、連続的な2つの部分画像を徐々にずらして重ね、重なり合う部分における両画像間の差分に基づいて、両画像の重ね合わせ位置を決定するという方法がある。この方法では、両画像の差分を求める際の計算を高速に行うために、差分の算出対象を、部分画像の一部分である検定領域に限定するという方法が採られる。
【0004】
上述の検定領域のような画像領域を決定する従来の方法として、例えば、後述の特許文献1に記載のものがある。特許文献1に記載の方法は、入力画像における、前画像との重なりが予想される所定の領域を注目領域とし、この注目領域から上記検定領域に相当する特徴領域を検出する。そして、この特徴領域に最も類似する類似領域を前画像から検出し、検出した類似領域と入力画像の特徴領域とが一致するように両画像を合成するというものである。
【特許文献1】特開2003−208620号公報
【発明の開示】
【発明が解決しようとする課題】
【0005】
しかしながら、上記特許文献1に記載の方法にあっては、注目領域、すなわち入力画像において前画像と重なり合うと予想される領域が、いずれの入力画像に対しても同じ位置に設定されることから、指が所定の一方向にスライドしたときに限り、入力画像を適正に重ね合わせることが可能となる。よって、例えば、指が規定の方向とは逆方向にスライドした場合、上記方法では、入力画像の注目領域が前画像に対応しないという事態が生じ、結果、入力画像を前画像に重ね合わせることができない。また、例えばセンサ上で指が一方向に滑らかにスライドしないとき、実際には、指が瞬時的に逆行するような動きとなるが、このような場合も、上述と同様な事態が生じることから、適正な全体指紋画像を構成することが困難となる。
【0006】
本発明は、上記課題に鑑みてなされたものであり、指紋の全体画像を構成する際に指のスライド方向の影響を受け難い画像構成方法を提供することを目的とする。
【課題を解決するための手段】
【0007】
本発明に係る画像構成方法は、スライド動作する指からその指紋を表す一連の部分画像を読み取るセンサ機構を具備する装置が、前記センサ機構が読み取る部分画像を順次記憶し、該順次記憶する部分画像における最新部分画像の既得部分画像に対する差分量を求めるための検定領域を、連続する複数の既得部分画像の変位方向に沿って前記既得部分画像に設定し、該既得部分画像に対する前記最新部分画像の重ね合わせ位置の検索範囲を前記検定領域の位置に基づき設定し、前記既得部分画像に対し前記最新部分画像を前記検索範囲にて変位させ且つ変位ごとに前記検定領域に係る前記既得部分画像および最新部分画像の差分量を求め、該求めた各差分量のうちの最小の差分量に対応する前記最新部分画像の変位を前記重ね合わせ位置に決定し、前記既得部分画像に対する前記重ね合わせ位置に前記最新部分画像を配置して記憶するという方法である。
【0008】
本発明に係る指紋画像構成装置は、スライド動作する指からその指紋を表す一連の部分画像を読み取るセンサ機構と、該センサ機構が読み取った一連の部分画像を順次記憶するメモリ機構と、該メモリ機構が記憶した一連の部分画像の構成処理を行う制御機構とを備え、前記制御機構は、前記メモリ機構が順次記憶する部分画像における最新部分画像の既得部分画像に対する差分量を求めるための検定領域を、連続する複数の既得部分画像の変位方向に沿って前記既得部分画像に設定し、該既得部分画像に対する前記最新部分画像の重ね合わせ位置の検索範囲を前記検定領域の位置に基づき設定する検索条件決定部と、前記既得部分画像に対し前記最新部分画像を前記検索範囲にて変位させ且つ変位ごとに前記検定領域に係る前記既得部分画像および最新部分画像の差分量を求める差分演算部と、前記差分量演算部が求めた各差分量のうちの最小の差分量に対応する前記最新部分画像の変位を前記重ね合わせ位置に決定する位置関係演算部と、前記メモリ機構において前記既得部分画像に対する前記重ね合わせ位置に前記最新部分画像を配置する画像配置部とを有する。
【0009】
本発明に係るプログラムは、スライド動作する指からその指紋を表す一連の部分画像を読み取るセンサ機構に接続されたコンピュータに、前記センサ機構が読み取る部分画像を順次記憶し、該順次記憶する部分画像における最新部分画像の既得部分画像に対する差分量を求めるための検定領域を、連続する複数の既得部分画像の変位方向に沿って前記既得部分画像に設定し、該既得部分画像に対する前記最新部分画像の重ね合わせ位置の検索範囲を前記検定領域の位置に基づき設定し、前記既得部分画像に対し前記最新部分画像を前記検索範囲にて変位させ且つ変位ごとに前記検定領域に係る前記既得部分画像および最新部分画像の差分量を求め、該求めた各差分量のうちの最小の差分量に対応する前記最新部分画像の変位を前記重ね合わせ位置に決定し、前記既得部分画像に対する前記重ね合わせ位置に前記最新部分画像を配置して記憶することを実行させる。
【発明の効果】
【0010】
本発明によれば、指紋の全体画像の構成処理において、既得部分画像および最新部分画像の差分を求めるための検定領域を、複数の既得部分画像の変位方向に沿って設定することから、センサ機構における指のスライド方向に制限を与え難いというメリットがある。また、たとえ指の移動速度が局所的に速くなる等の変動があっても、その変動に対処し易いという効果を奏する。
【発明を実施するための最良の形態】
【0011】
[実施例]
以下、本発明の実施例について図面を用いて詳細に説明する。図1は、本発明による実施例の指紋画像構成装置の構成を示すブロック図である。実施例の指紋画像構成装置100は、指紋を表す一連の部分画像を読み取るセンサ機構であるスイープ型指紋センサ10と、該センサ10が読み取る部分画像を記憶するメモリ機構20と、該メモリ機構20が記憶した一連の部分画像から全体画像を構成する構成処理を行う制御機構30とを備える。
【0012】
スイープ型指紋センサ10の概観を図2に示す。スイープ型指紋センサ10は、図示のx方向の幅が指10Aとほぼ同じであり、y方向の長さが指10Aの指紋全体の長さ、すなわち第一関節から指先までの長さよりも短いセンサ面を持ち、この面上で概略y方向にスライドする指10Aからその指紋の部分画像を連続的に読み取る。
【0013】
図3に、指紋画像構成装置100の機能的な構成ブロックを示す。図示の部分画像格納部20aおよび全体画像格納部20bは、それぞれメモリ機構20に割り当てられた記憶領域である。前者の部分画像格納部20aは、スイープ型指紋センサ10から順次入力される部分画像を格納し、後者の全体画像格納部20bは、後述の制御機構30での構成処理を経て形成される指紋の全体画像を格納する。
【0014】
部分画像格納部20aは、複数の部分画像を格納可能な容量を有し、図示の例では、部分画像2つ分を格納するための記憶領域121および記憶領域122を有する。スイープ型指紋センサ10から入力された最新部分画像は、記憶領域122に格納され、この最新部分画像の前画像に相当する既得部分画像、すなわち現時点から2番目に新しい部分画像が記憶領域121に格納される。
【0015】
ここで、記憶領域121および記憶領域122に格納される部分画像の例を図4に示す。図示の指10Aに記された曲線は指紋の隆線51を表し、メモリ機構20には、スイープ型指紋センサ10の読み取りタイミングごとに、同図に実線または点線にて示す矩形の部分画像が1つずつ入力される。図示の例では、実線の矩形は、記憶領域121に格納された既得部分画像11を示し、この既得部分画像11に続いて読み取られて記憶領域122に格納された最新部分画像12が点線の矩形にて示されている。
【0016】
図4において既得部分画像11および最新部分画像12の位置がずれているのは、入力ごとに指10Aとスイープ型指紋センサ10との相対的な位置がずれていくことを示す。また、これらの両画像11および12の位置関係は、図2に示す指10Aが、スイープ型指紋センサ10に対しy軸のマイナス(−)方向にスライドしたことを示す。
【0017】
図3に示す制御機構30の機能構成は、記憶領域121の既得部分画像に、記憶領域122の最新部分画像を重ね合わせる構成処理を担うものである。検索条件決定部31は、後述の位置関係演算部33から供給される相対位置関係の情報を記憶し、過去の直近の部分画像の変位方向に応じて、最新部分画像の構成処理に用いるべき検定領域の位置と、この検定領域に対応する変位の検索範囲とを決定する。
【0018】
差分演算部32は、基準となる部分画像、すなわち記憶領域121の既得部分画像と、処理対象の部分画像である記憶領域122の最新部分画像との差分を、検索条件決定部31から出力された検定領域および変位の検索範囲に基づいて計算し、算出結果の変位と差分との組み合わせを出力する。
【0019】
位置関係演算部33は、差分演算部32から出力された変位および差分の組み合わせに基づき、既得部分画像に対する最新部分画像の重ね合わせ位置を決定する。この決定においては、最新部分画像が既得部分画像に対して相対的にどのような位置関係にあるかを求める。上述した検索条件決定部31が記憶する相対位置関係の情報とは、この位置関係演算部33が求めた重ね合わせ位置の情報である。
【0020】
配置座標演算部34は、位置関係演算部33が算出した相対位置関係と、前回配置した部分画像の配置座標とから、部分画像格納部20aの最新部分画像が全体画像格納部20b内で取るべき配置座標を算出する。算出した配置座標は、次回の演算に備えて内部に記憶する。画像配置部35は、配置座標演算部34の算出結果にしたがって、最新部分画像を全体画像格納部20bに配置する。
【0021】
図4に示すフローチャートに沿って、指紋画像構成装置100の動作手順を説明する。スイープ型指紋センサ10にて指10Aがスライドし、部分画像が入力されるごとに(ステップS1)、メモリ機構20は、図4に示すような最新部分画像12を記憶領域122に記憶する(ステップS2)。このとき、他方の記憶領域121には、最新部分画像12の前画像である既得部分画像11が記憶される。以下、制御機構30が行う構成処理の一例として、図4に示す既得部分画像11に最新部分画像12を重ね合わせる手順を説明する。
【0022】
検索条件決定部31は、今回の構成処理対象となる最新部分画像12に用いるべき検定領域および変位の検索範囲を設定する。検定領域とは、既得部分画像11に対する最新部分画像12の差分の算出対象となる領域を指し、この検定領域は、既得部分画像11に対し設定される。また、変位の検索範囲とは、既得部分画像11に対する最新部分画像12の重ね合わせ位置を決定するために、既得部分画像11上で最新部分画像12を変位させるy軸方向の範囲を指す。
【0023】
図6および図7を用いて、まず、検定領域の決定方法を説明する。図6は、説明のため、3つの検定領域40、41および42を一括的に既得部分画像11上に示したものである。検定領域40は、既得部分画像11におけるy軸上の中央部にあり、この中央部からy軸のプラス(+)方向に沿って所定の移動量Dの間隔を置いた位置に検定領域41がある。また、中央部からy軸のマイナス(−)方向に沿って同移動量Dの間隔を置いた位置に検定領域42がある。検索条件決定部31は、過去に読み取った数回分の部分画像の変位量の総和を求め、求めた総和の符号に基づき当該直近の部分画像の変位方向を判定する(図5:ステップS3)。そして、判定した変位方向に応じて、図6の3つの検定領域の中から1つを選定する(ステップS4)。
【0024】
検定領域の選定について、図7を用いて具体的に説明する。ここでは、スイープ型指紋センサ10が順次読み取る部分画像間の相対位置関係に関する情報が、図7に示すような一覧に記録されているとする。図示の一覧には、スイープ型指紋センサ10の「読み取り順番」と、後述の位置関係演算部33が算出した部分画像間の変位量である「相対位置関係」と、現時点から過去数回分の「相対位置関係」の「総和」と、「総和」の符号に準じた「変位方向」とが示されている。図示の例では、直近の過去3回分の移動加算値が現時点の「総和」として記録されており、例えば、読み取り順番「4」の総和「−4」は、直近の読み取り順番「1」〜「3」の相対位置関係「−2」、「−1」及び「−1」の総和に対応する。
【0025】
検索条件決定部31は、相対位置関係の総和の符号、すなわち図7の「変位方向」の記録が正(++)である場合、図6の既得部分画像11の中央部からy軸のプラス方向にある検定領域41を採用し(図5:ステップS5)、変位方向が負(--)である場合は、y軸のマイナス方向にある検定領域42を採用する(ステップS6)。なお、図7に示す一覧には存在しないが、仮に、総和がゼロの場合は、図6の既得部分画像11の中央部にある検定領域40を採用する(ステップS7)。
【0026】
上述の方法では、図6に示す移動量Dが固定値であるが、この移動量Dを、例えば過去の「相対位置関係」の変動レベルに応じて設定するという方法により、可変にしてもよい。具体的には、図7の記録において、例えば現時点の読み取り順番が「7」であるときに、過去の読み取り順番「4」〜「6」の相対位置関係の移動差に着目する。図7から分かるように、「4」及び「5」間の相対位置関係の差分は「2」であり、続く「5」及び「6」間の差分は「1」であることから、検索条件決定部31は、読み取り順番「4」から「6」への遷移においては、相対位置関係の変動レベルが小さくなる傾向にあると判断する。
【0027】
上記判断のもとに、現時点の読み取り順番「7」における検定領域の位置は、前回の読み取り順番「6」のときに設定した検定領域の位置から、この順番「6」のときに採用した移動量dよりも小さい移動量d´の間隔を置いた位置に決定する。これを図8を用いて更に説明すると、現時点の読み取り順番「7」の検定領域45は、前回の読み取り順番「6」の検定領域44からプラス方向に沿って移動量d´の間隔を置いて設定されるが、この移動量d´は、前々回の読み取り順番「5」の検定領域43からの移動量dよりも小さい値になるということである。なお、仮に、相対位置関係の変動レベルが大きくなる傾向にあるときは、前回の移動量よりも大きな量を今回の移動量に設定する。上記説明した方法によれば、直近の部分画像が成す相対位置関係の変動レベルを考慮した変位検索範囲を設定することができる。
【0028】
次に、検索条件決定部31は、上述のような手順で決定した検定領域の位置に基づいて、既得部分画像11に対する最新部分画像12の重ね合わせ位置を検索するための変位検索範囲を設定する。図9に、図6の検定領域40に対する変位検索範囲Sa0及びSb0を示す。変位検索範囲Sa0及びSb0は、図9に示すように、既得部分画像11の検定領域40と、既得部分画像11上にて変位する最新部分画像12とが重なり合う範囲である。
【0029】
図9を用いて、上記の変位検索範囲の設定原理を説明すると、既得部分画像11上で最新部分画像12を図示の基準位置S0からy軸に沿ってプラスまたはマイナス方向に徐々に変位させたとき、既得部分画像11の検定領域40と最新部分画像12とを重ねるには、マイナス方向の変位では、図9に点線にて示す最新部分画像12aの位置が限界であり、プラス方向の変位では、同図の最新部分画像12bの位置が限界となる。検索条件決定部31は、これらの限界の位置と基準位置S0とから得られるy軸上の範囲を、それぞれ変位検索範囲Sa0及びSb0として設定する(図5:ステップS8)。図9の例では、検定領域40が既得部分画像11の中央部にあることから、マイナス方向の変位検索範囲Sa0およびプラス方向の変位検索範囲Sb0は同量となる(Sa0=Sb0)。
【0030】
また、検索条件決定部31は、既得部分画像11に検定領域41が設定されているときは、図10に示す変位検索範囲Sa1及びSb1を設定し(図5:ステップS9)、既得部分画像11に検定領域42が設定されているときは、図11に示す、変位検索範囲Sa2及びSb2を設定する(図5:ステップS10)。
【0031】
検定領域41の場合、図10に示すように、この検定領域41が既得部分画像11の中央部からy軸のプラス方向に沿った箇所に配置されていることから、マイナス方向の変位検索範囲Sa1よりも、プラス方向の変位検索範囲Sb1のほうが大きい(Sa1<Sb1)。すなわち、順次読み取られる部分画像の相対位置関係が、y軸のプラス方向に遷移する傾向にあるとき、図10に示すように、マイナス方向の検索範囲よりもプラス方向のほうが大きく設定されることとなる。これは、後に差分演算部14において、既得部分画像11に対する最新部分画像12の重ね合わせ位置を検索する際、プラス方向の検索に有利に作用する。
【0032】
さらに説明すると、検定領域41に対する図10の変位検索範囲Sa1及びSb1と、既得部分画像11の中央部に設定された検定領域40に対する図9の変位検索範囲Sa0及びSb0との関係は、「Sa1=Sa0−D」および「Sb1=Sb0+D」で表すことができる。後者の「Sb1=Sb0+D」は、検定領域41を採用したとき、検定領域40を採用したときに比べて、移動量「D」の分、y軸プラス方向の変位検索範囲が拡大することを意味する。よって、仮に、最新部分画像12が既得部分画像11に対しプラス方向に大きく遷移する、すなわち指のスライドが急に速くなったとしても、上記の検定領域41を採用することにより、プラス方向の上記変動に対処し易くなる。
【0033】
また逆に、部分画像の相対位置関係がy軸のマイナス方向に遷移する傾向にあるときに設定される検定領域42に対しては、図11に示すように、プラス方向の変位検索範囲Sb2よりも、マイナス方向の変位検索範囲Sa2が大きくなる(Sa2>Sb2)。このことは、その後の差分演算部32による重ね合わせ位置の検索の際、マイナス方向の検索に有利に作用する。
【0034】
指の移動速度は連続的に変化するため、直近に算出された部分画像間の相対位置関係と、現在算出しようとしている相対位置関係との間には強い相関がある。以上で述べた検索条件の決定方法は、この事実に基づいている。
【0035】
なお、指紋画像の構成処理の初期においては、読み取った部分画像の数量が少ないため、直近の既得部分画像の変位方向を判定し難い。よって、処理の初期は、変位方向の判定に必要な数量、例えば読み取り開始から3回分、の読み取りを終えるまでは、検定領域を既得部分画像11の中央部に配置した図9に示す検索条件を固定的に採用してもよい。これは、変位方向が不明の初期段階においては、差し当たり、プラス方向およびマイナス方向のいずれの変位にも対処し易くするという考えに基づく。
【0036】
検索条件決定部31が上述の検定領域および変位検索範囲を決定するにあたっては、指が概略y方向に移動することを考慮して、上記説明した方法にてy方向についてのみ行えば本発明の効果は十分に得られるが、同様の方法でx方向についての決定を行うことも可能である。
【0037】
検索条件決定部31は、以上の方法によって決定した検定領域の位置および変位検索範囲を、今回の検索条件として差分演算部32に出力し、次回の処理に備えて、この検索条件を内部に記憶する。
【0038】
差分演算部32は、記憶領域121に格納された基準となる既得部分画像11と、記憶領域122に格納された処理対象の最新部分画像12との差分量を、検索条件決定部31から得た上記の検索条件に従って算出する。差分量の算出にあたっては、既得部分画像11と最新部分画像12とを、検索条件決定部31から出力された変位検索範囲にて変位させる、すなわち徐々にずらして重ね合わせる。そして、重ね合わせる都度、既得部分画像11の検定領域内に存在する画素の濃淡データと、対応する最新部分画像12の領域に存在する画素の濃淡データとの差分量を順次求め、求めた全画素分の差分量を総和する。この総和により得られる差分量が、1回の重ね合わせ時に求められる差分量である。
【0039】
差分演算部32は、上記の各重ね合わせ時に得られた差分量と、その時点の最新部分画像12の変位とを組み合わせて位置関係演算部33に出力する(図5:ステップS11)。なお、差分量としては、上述した各画素の濃淡データの差分の総和以外にも、差分の二乗の総和を用いることもできる。また、両部分画像における指紋隆線のベクトル分布または指紋隆線の端点および分岐点といった指紋の特徴となる点を数値化し、その数値を両部分画像間で比較することにより差分量を求めるという方法を用いても良い。
【0040】
位置関係演算部33は、差分演算部32が出力した差分量および変位の組み合わせに基づき、既得部分画像11に対する最新部分画像12の重ね合わせ位置、すなわち両画像11および12を互いに重複する箇所にて重ねるための位置を決定する。その際、位置関係演算部33は、差分演算部32から得た上記の差分量のうちの最小の差分量に着目し、この最小の差分量に対応する変位を、重ね合わせ位置に決定する(図5:ステップS12)。ここで求められた最新部分画像12の重ね合わせ位置が、例えば図7に沿って説明した「相対位置関係」の値となる。位置関係演算部33は、決定した相対位置関係を検索条件決定部31および配置座標演算部34に出力する。
【0041】
配置座標演算部34は、基準となる既得部分画像11の原点の、全体画像内における座標と、位置関係演算部33から得た相対位置関係とから、配置対象となる最新部分画像12の原点の、全体画像内における配置座標を算出する。既得部分画像11の原点の座標値は、前回の演算で記憶しておいたものである。部分画像の原点とは、スイープ型指紋センサ10が読み取る全ての部分画像に対し共通に設定される基準座標を指し、例えば、部分画像が成す矩形における特定の頂点座標などが原点として採用される。配置座標演算部34は、最新部分画像12の原点の、全体画像における座標値を画像配置部35に出力するとともに、次回の演算に備えてこの座標値を配置座標演算部34内に記憶する(図5:ステップS13)。
【0042】
最後に、画像配置部35は、配置座標演算部34が出力した座標値に基づいて、全体画像格納部20bにて最新部分画像12を既得部分画像11に重ね合わせて配置する(ステップS14)。これにより、例えば図4に示すような態様で、既得部分画像11に対し最新部分画像12が配置される。以上の処理が、スイープ型指紋センサ10による指紋の読み取りを終えるまで繰り返される。
【0043】
以上説明した実施例の指紋画像構成装置100によれば、指紋画像の構成処理において既得部分画像11に最新部分画像12を重ねるにあたり、両画像の差分を求めるための検定領域を、複数の既得部分画像の変位方向に沿って設定することから、スイープ型指紋センサ10における指のスライド方向の制限を緩和することができる。これにより、スイープ型指紋センサ10の使い勝手が向上する。
【0044】
なお、上述した制御機構30の動作手順は、コンピュータが実行するプログラムの工程に対応する。よって、上記手順に対応するプログラムを、スイープ型指紋センサ10を具備するパーソナルコンピュータあるいは携帯情報端末等の情報処理機器に導入することにより、当該機器を指紋画像構成装置100として利用することができる。
【図面の簡単な説明】
【0045】
【図1】本発明による実施例の指紋画像構成装置の構成を示すブロック図である。
【図2】実施例のスイープ型指紋センサを説明するための説明図である。
【図3】実施例の指紋画像構成装置の機能的な構成を示すブロック図である。
【図4】実施例の部分画像を説明するための説明図である。
【図5】実施例の動作手順を説明するためのフローチャートである。
【図6】実施例の検定領域の位置を説明するための説明図である。
【図7】実施例の検定領域の決定方法を説明するための説明図である。
【図8】実施例の検定領域の他の決定方法を説明するための説明図である。
【図9】実施例の変位検索範囲を説明するための説明図である。
【図10】実施例の変位検索範囲を説明するための説明図である。
【図11】実施例の変位検索範囲を説明するための説明図である。
【符号の説明】
【0046】
100 指紋画像構成装置
10 スイープ型指紋センサ
20 メモリ機構
20a:部分画像格納部、20b:全体画像格納部、121、122:記憶領域
30 制御機構
31:検索条件決定部、32:差分演算部、33:位置関係演算部、34:配置座標演算部、35:画像配置部
【特許請求の範囲】
【請求項1】
スライド動作する指からその指紋を表す一連の部分画像を読み取るセンサ機構を具備する装置が、
前記センサ機構が読み取る部分画像を順次記憶し、該順次記憶する部分画像における最新部分画像の既得部分画像に対する差分量を求めるための検定領域を、連続する複数の既得部分画像の変位方向に沿って前記既得部分画像に設定し、該既得部分画像に対する前記最新部分画像の重ね合わせ位置の検索範囲を前記検定領域の位置に基づき設定し、前記既得部分画像に対し前記最新部分画像を前記検索範囲にて変位させ且つ変位ごとに前記検定領域に係る前記既得部分画像および最新部分画像の差分量を求め、該求めた各差分量のうちの最小の差分量に対応する前記最新部分画像の変位を前記重ね合わせ位置に決定し、前記既得部分画像に対する前記重ね合わせ位置に前記最新部分画像を配置して記憶することを特徴とする画像構成方法。
【請求項2】
前記装置が、前記検定領域を設定するとき、前記複数の既得部分画像の各変位量の総和の符号に基づき前記変位方向を求め、前記既得部分画像の中央部から前記変位方向に沿って所定間隔を置いた位置に前記検定領域を設定することを特徴とする請求項1記載の画像構成方法。
【請求項3】
前記装置が、前記検定領域を設定するとき、前記複数の既得部分画像の各変位量の総和の符号に基づき前記変位方向を求め、前記各変位量間の変動レベルに応じて前回の検定領域の設定位置からの移動量を決定し、前記前回の設定位置から、前記移動量の分、前記変位方向に沿って間隔を置いた位置に前記検定領域を設定することを特徴とする請求項1記載の画像構成方法。
【請求項4】
スライド動作する指からその指紋を表す一連の部分画像を読み取るセンサ機構と、該センサ機構が読み取った一連の部分画像を順次記憶するメモリ機構と、該メモリ機構が記憶した一連の部分画像の構成処理を行う制御機構とを備え、
前記制御機構は、
前記メモリ機構が順次記憶する部分画像における最新部分画像の既得部分画像に対する差分量を求めるための検定領域を、連続する複数の既得部分画像の変位方向に沿って前記既得部分画像に設定し、該既得部分画像に対する前記最新部分画像の重ね合わせ位置の検索範囲を前記検定領域の位置に基づき設定する検索条件決定部と、
前記既得部分画像に対し前記最新部分画像を前記検索範囲にて変位させ且つ変位ごとに前記検定領域に係る前記既得部分画像および最新部分画像の差分量を求める差分量演算部と、
前記差分演算部が求めた各差分量のうちの最小の差分量に対応する前記最新部分画像の変位を前記重ね合わせ位置に決定する位置関係演算部と、
前記メモリ機構において前記既得部分画像に対する前記重ね合わせ位置に前記最新部分画像を配置する画像配置部とを有することを特徴とする指紋画像構成装置。
【請求項5】
前記検索条件決定部は、前記検定領域を設定するとき、前記複数の既得部分画像の各変位量の総和の符号に基づき前記変位方向を求め、前記既得部分画像の中央部から前記変位方向に沿って所定間隔を置いた位置に前記検定領域を設定することを特徴とする請求項4記載の指紋画像構成装置。
【請求項6】
前記検索条件決定部は、前記検定領域を設定するとき、前記複数の既得部分画像の各変位量の総和の符号に基づき前記変位方向を求め、前記各変位量間の変動レベルに応じて前回の検定領域の設定位置からの移動量を決定し、前記前回の設定位置から、前記移動量の分、前記変位方向に沿って間隔を置いた位置に前記検定領域を設定することを特徴とする請求項4記載の指紋画像構成装置。
【請求項7】
スライド動作する指からその指紋を表す一連の部分画像を読み取るセンサ機構に接続されたコンピュータに、
前記センサ機構が読み取る部分画像を順次記憶し、該順次記憶する部分画像における最新部分画像の既得部分画像に対する差分量を求めるための検定領域を、連続する複数の既得部分画像の変位方向に沿って前記既得部分画像に設定し、該既得部分画像に対する前記最新部分画像の重ね合わせ位置の検索範囲を前記検定領域の位置に基づき設定し、前記既得部分画像に対し前記最新部分画像を前記検索範囲にて変位させ且つ変位ごとに前記検定領域に係る前記既得部分画像および最新部分画像の差分量を求め、該求めた各差分量のうちの最小の差分量に対応する前記最新部分画像の変位を前記重ね合わせ位置に決定し、前記既得部分画像に対する前記重ね合わせ位置に前記最新部分画像を配置して記憶することを実行させることを特徴とするプログラム。
【請求項8】
前記コンピュータに、
前記検定領域を設定するとき、前記複数の既得部分画像の各変位量の総和の符号に基づき前記変位方向を求め、前記既得部分画像の中央部から前記変位方向に沿って所定間隔を置いた位置に前記検定領域を設定することを実行させることを特徴とする請求項7記載のプログラム。
【請求項9】
前記コンピュータに、
前記検定領域を設定するとき、前記複数の既得部分画像の各変位量の総和の符号に基づき前記変位方向を求め、前記各変位量間の変動レベルに応じて前回の検定領域の設定位置からの移動量を決定し、前記前回の設定位置から、前記移動量の分、前記変位方向に沿って間隔を置いた位置に前記検定領域を設定することを実行させることを特徴とする請求項7記載のプログラム。
【請求項1】
スライド動作する指からその指紋を表す一連の部分画像を読み取るセンサ機構を具備する装置が、
前記センサ機構が読み取る部分画像を順次記憶し、該順次記憶する部分画像における最新部分画像の既得部分画像に対する差分量を求めるための検定領域を、連続する複数の既得部分画像の変位方向に沿って前記既得部分画像に設定し、該既得部分画像に対する前記最新部分画像の重ね合わせ位置の検索範囲を前記検定領域の位置に基づき設定し、前記既得部分画像に対し前記最新部分画像を前記検索範囲にて変位させ且つ変位ごとに前記検定領域に係る前記既得部分画像および最新部分画像の差分量を求め、該求めた各差分量のうちの最小の差分量に対応する前記最新部分画像の変位を前記重ね合わせ位置に決定し、前記既得部分画像に対する前記重ね合わせ位置に前記最新部分画像を配置して記憶することを特徴とする画像構成方法。
【請求項2】
前記装置が、前記検定領域を設定するとき、前記複数の既得部分画像の各変位量の総和の符号に基づき前記変位方向を求め、前記既得部分画像の中央部から前記変位方向に沿って所定間隔を置いた位置に前記検定領域を設定することを特徴とする請求項1記載の画像構成方法。
【請求項3】
前記装置が、前記検定領域を設定するとき、前記複数の既得部分画像の各変位量の総和の符号に基づき前記変位方向を求め、前記各変位量間の変動レベルに応じて前回の検定領域の設定位置からの移動量を決定し、前記前回の設定位置から、前記移動量の分、前記変位方向に沿って間隔を置いた位置に前記検定領域を設定することを特徴とする請求項1記載の画像構成方法。
【請求項4】
スライド動作する指からその指紋を表す一連の部分画像を読み取るセンサ機構と、該センサ機構が読み取った一連の部分画像を順次記憶するメモリ機構と、該メモリ機構が記憶した一連の部分画像の構成処理を行う制御機構とを備え、
前記制御機構は、
前記メモリ機構が順次記憶する部分画像における最新部分画像の既得部分画像に対する差分量を求めるための検定領域を、連続する複数の既得部分画像の変位方向に沿って前記既得部分画像に設定し、該既得部分画像に対する前記最新部分画像の重ね合わせ位置の検索範囲を前記検定領域の位置に基づき設定する検索条件決定部と、
前記既得部分画像に対し前記最新部分画像を前記検索範囲にて変位させ且つ変位ごとに前記検定領域に係る前記既得部分画像および最新部分画像の差分量を求める差分量演算部と、
前記差分演算部が求めた各差分量のうちの最小の差分量に対応する前記最新部分画像の変位を前記重ね合わせ位置に決定する位置関係演算部と、
前記メモリ機構において前記既得部分画像に対する前記重ね合わせ位置に前記最新部分画像を配置する画像配置部とを有することを特徴とする指紋画像構成装置。
【請求項5】
前記検索条件決定部は、前記検定領域を設定するとき、前記複数の既得部分画像の各変位量の総和の符号に基づき前記変位方向を求め、前記既得部分画像の中央部から前記変位方向に沿って所定間隔を置いた位置に前記検定領域を設定することを特徴とする請求項4記載の指紋画像構成装置。
【請求項6】
前記検索条件決定部は、前記検定領域を設定するとき、前記複数の既得部分画像の各変位量の総和の符号に基づき前記変位方向を求め、前記各変位量間の変動レベルに応じて前回の検定領域の設定位置からの移動量を決定し、前記前回の設定位置から、前記移動量の分、前記変位方向に沿って間隔を置いた位置に前記検定領域を設定することを特徴とする請求項4記載の指紋画像構成装置。
【請求項7】
スライド動作する指からその指紋を表す一連の部分画像を読み取るセンサ機構に接続されたコンピュータに、
前記センサ機構が読み取る部分画像を順次記憶し、該順次記憶する部分画像における最新部分画像の既得部分画像に対する差分量を求めるための検定領域を、連続する複数の既得部分画像の変位方向に沿って前記既得部分画像に設定し、該既得部分画像に対する前記最新部分画像の重ね合わせ位置の検索範囲を前記検定領域の位置に基づき設定し、前記既得部分画像に対し前記最新部分画像を前記検索範囲にて変位させ且つ変位ごとに前記検定領域に係る前記既得部分画像および最新部分画像の差分量を求め、該求めた各差分量のうちの最小の差分量に対応する前記最新部分画像の変位を前記重ね合わせ位置に決定し、前記既得部分画像に対する前記重ね合わせ位置に前記最新部分画像を配置して記憶することを実行させることを特徴とするプログラム。
【請求項8】
前記コンピュータに、
前記検定領域を設定するとき、前記複数の既得部分画像の各変位量の総和の符号に基づき前記変位方向を求め、前記既得部分画像の中央部から前記変位方向に沿って所定間隔を置いた位置に前記検定領域を設定することを実行させることを特徴とする請求項7記載のプログラム。
【請求項9】
前記コンピュータに、
前記検定領域を設定するとき、前記複数の既得部分画像の各変位量の総和の符号に基づき前記変位方向を求め、前記各変位量間の変動レベルに応じて前回の検定領域の設定位置からの移動量を決定し、前記前回の設定位置から、前記移動量の分、前記変位方向に沿って間隔を置いた位置に前記検定領域を設定することを実行させることを特徴とする請求項7記載のプログラム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【公開番号】特開2006−18436(P2006−18436A)
【公開日】平成18年1月19日(2006.1.19)
【国際特許分類】
【出願番号】特願2004−193841(P2004−193841)
【出願日】平成16年6月30日(2004.6.30)
【出願人】(000227205)NECインフロンティア株式会社 (1,047)
【Fターム(参考)】
【公開日】平成18年1月19日(2006.1.19)
【国際特許分類】
【出願日】平成16年6月30日(2004.6.30)
【出願人】(000227205)NECインフロンティア株式会社 (1,047)
【Fターム(参考)】
[ Back to top ]