
画像特徴抽出装置
【課題】画像の周波数及び方向を考慮した特徴を、従来よりも少ない計算量かつ短時間で抽出する。
【解決手段】特徴量算出部2は、注目画素(xc,yc)を通過する傾きθの直線lを設定し、その直線l上において輝度値の増減が反転するポイント(画素)を特定し、その輝度値に、ガウス関数gの重みを乗じた上でその総和を算出する。この総和を注目画素に対する特徴量として出力する。特徴ベクトル算出部3は、特徴量算出部2により出力された特徴量に基づいて、画像領域全体または一部に対する特徴ベクトルを算出する。この特徴ベクトルは、画像領域の各画素に対する特徴量の平均、分散または頻度ヒストグラム等の要素により構成される。
【解決手段】特徴量算出部2は、注目画素(xc,yc)を通過する傾きθの直線lを設定し、その直線l上において輝度値の増減が反転するポイント(画素)を特定し、その輝度値に、ガウス関数gの重みを乗じた上でその総和を算出する。この総和を注目画素に対する特徴量として出力する。特徴ベクトル算出部3は、特徴量算出部2により出力された特徴量に基づいて、画像領域全体または一部に対する特徴ベクトルを算出する。この特徴ベクトルは、画像領域の各画素に対する特徴量の平均、分散または頻度ヒストグラム等の要素により構成される。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、画像の類似判定、クラスタリング、映像内のオブジェクト追跡等を行うために、その画像または画像の部分領域の特徴を抽出する装置に関し、特に、画像の周波数及び方向を考慮した特徴を抽出する技術に関する。
【背景技術】
【0002】
従来、画像の類似性を判定する処理、画像をクラスタリングする処理、映像内のオブジェクトを追跡する処理等の様々な画像処理を行うために、画像または画像の部分領域の特徴量を算出する技術が知られている。例えば、ガボールウェーブレットフィルタは、画像の周波数及び方向を考慮した特徴量を算出するフィルタであり、前述した様々な画像処理に利用されている。
【0003】
ガボールウェーブレットフィルタは、解像度をm、方位をnとすると、以下の式で定義される。
【数1】

【数2】
ここで、gmn(x,y)はある画素(以下、注目画素という。)の座標(x,y)におけるガボールウェーブレットフィルタの値、σはガウス分布における標準偏差、aは拡大率、Sは解像度の総数、Kは方位の総数をそれぞれ表す。
【0004】
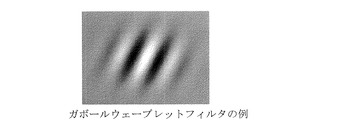
図1は、ガボールウェーブレットフィルタの例を示す図である。図1によれば、ガボールウェーブレットフィルタは、周波数成分と方向エッジの選択性が強く、エッジ抽出制御が容易であることがわかる。つまり、ガボールウェーブレットフィルタを画像に適用することによりガボール空間を得ることができ、ガボール空間において、画像の周波数及び方向を考慮した特徴量を算出することができる。
【0005】
このようなガボールウェーブレットフィルタを用いた特徴量の算出手法の例が、非特許文献1に記載されている。具体的には、特徴量は、注目画素(x,y)におけるそれぞれの解像度m及び方位nの組み合わせについて、ガボールウェーブレットフィルタを対象画像領域内の全画素(x,y)に対して畳み込むことにより算出される。
【数3】
ここで、Wmn(x,y)は特徴量、f(x,y)は座標(x,y)における輝度値をそれぞれ表す。
【0006】
そして、式(3)により算出された特徴量Wmn(x,y)である畳み込みの結果を用いて平均値μ及び標準偏差σが算出され、それぞれ解像度m及び方位n毎に並べることにより、式(4)に示す特徴ベクトルが算出される。ここで、特徴量Wmn(x,y)は、ガボールウェーブレットフィルタgmn(x,y)にマッチした成分が反映された値となる。
【数4】
【0007】
ここで、μm,n及びσm,nは、以下の式により算出される。
【数5】
【数6】
式(3)及び式(4)中のH,Wは、それぞれ対象画像領域の高さ、幅を表す。
【0008】
【非特許文献1】Yanagawa. A, Chang. S.F, Kennedy. L, Hsu. W, “Columbia University’s baseline detectors for 374 LSCOM semantic visual concept,” Technical report, Columbia University (2007)
【発明の開示】
【発明が解決しようとする課題】
【0009】
しかしながら、ガボールウェーブレットフィルタを用いた算出手法では、そのサイズをN×Nピクセルとした場合、特徴量は全ての画素について算出されるから、特徴量の算出時間はO(N2)となり、計算コストが非常に高いという問題があった。このため、例えば、多数の画像を分類する場合、またはサイズの大きい画像を扱う場合には、特徴量の算出のために多大な計算量と時間が必要となる。ここで、O(N2)は、算出時間の関数であり、N2に比例していることを示している。
【0010】
そこで、本発明は前記課題を解決するためになされたものであり、その目的は、画像の周波数及び方向を考慮した特徴を、従来よりも少ない計算量かつ短時間で抽出することが可能な画像特徴抽出装置を提供することにある。
【課題を解決するための手段】
【0011】
本発明者らは、上記目的を達成すべく研究開発を進めた結果、画像の周波数及び方向を考慮した特徴を、その方向の直線上の画素についてのみ算出することに着目し、従来のガボールウェーブレットフィルタを用いた場合に比べて少ない計算量かつ短時間で抽出する手法を見出した。具体的には、その手法は、注目画素を通過する直線を設定し、その直線上において輝度値の増減が反転する画素を特定し、その画素の輝度値及びガウス関数に基づいて特徴量を算出するものである。従来のガボールウェーブレットフィルタを用いた算出手法では、そのサイズをN×Nピクセルとした場合の計算コストがO(N2)であるのに対し、本発明による算出手法では、計算コストがO(N)となる。また、本発明による算出手法では、輝度値の増減が反転しない画素についての演算が不要になる。したがって、画像の周波数及び方向を考慮した特徴を、従来に比べて少ない計算量かつ短時間で抽出することが可能となる。
【0012】
すなわち、本発明による請求項1の発明は、画像の特徴を抽出する画像特徴抽出装置において、前記画像内の注目画素を通過する直線を設定し、前記直線上において輝度値の増減が反転する画素を特定し、前記特定した画素の輝度値、及び前記特定した画素におけるガウス関数の重みに基づいて、前記注目画素の特徴を抽出する、ことを特徴とする。
【0013】
また、本発明による請求項2の発明は、請求項1に記載の画像特徴抽出装置において、所定の解像度における前記画像内の注目画素について、前記注目画素を通過する直線を方位によって設定し、前記直線上において輝度値が反転する画素を、隣り合う画素の輝度値の変化によって特定し、前記注目画素を中心とした直線上の所定の範囲内で、前記特定した画素の輝度値、及び、前記注目画素の位置を平均としたガウス関数による重みに基づいて、前記直線における注目画素の特徴量を算出する特徴量算出部、を備えたことを特徴とする。
【0014】
また、本発明による請求項3の発明は、請求項2に記載の画像特徴抽出装置において、前記特徴量算出部が、画像内の全ての画素または一部の画素について、所定の解像度毎に及び所定の方位毎に前記直線における注目画素の特徴量を算出する、ことを特徴する。
【0015】
また、本発明による請求項4の発明は、請求項2または3に記載の画像特徴抽出装置において、前記特徴量算出部により算出された特徴量に基づいて、前記画像内の全領域または一部の領域の特徴を示す特徴ベクトルを算出する特徴ベクトル算出部、を備えたことを特徴とする。
【0016】
また、本発明による請求項5の発明は、請求項4に記載の画像特徴抽出装置において、前記特徴ベクトル算出部が算出する特徴ベクトルを、前記特徴量における平均値及び分散を要素とするベクトル、または、前記特徴量における平均値に基づいて算出した値及び分散に基づいて算出した値を要素とするベクトルとする、ことを特徴とする。
【0017】
また、本発明による請求項6の発明は、請求項1から5までのいずれか一項に記載の画像特徴抽出装置において、前記輝度値の代わりに画素値を用いる、ことを特徴とする。
【発明の効果】
【0018】
以上のように、本発明によれば、画像の周波数及び方向を考慮した特徴を、従来よりも少ない計算量かつ短時間で抽出することが可能となる。
【発明を実施するための最良の形態】
【0019】
以下、本発明を実施するための最良の形態について図面を用いて詳細に説明する。
〔特徴量算出手法〕
まず、本発明の実施形態による、画像の特徴量を算出する手法について説明する。画像特徴抽出装置は、画像を構成する注目画素を通過する直線上において、輝度値の増減の変化に基づいて、その注目画素に対する特徴量を算出する。
【0020】
x,y軸における注目画素の座標を(xc,yc)とした場合、注目画素からの距離r、角度θの位置に存在する画素の座標は、以下の式により表される。この場合、設定する直線は、注目画素を通過し、かつy軸との間の角度がθとなる直線である。
【数7】
【0021】
また、座標Vr,θにおける輝度の増減値は、以下の式により表される。
【数8】
ここで、f(v)は座標Vr,θにおける画素の輝度値を表す。式(8)は、座標Vr,θにおける輝度の増減値S(Vr,θ)が1または0であり、設定した直線において距離rを増加させた場合、輝度値が増加するときまたは変化がないときにS(Vr,θ)=1であり、輝度値が減少するときにS(Vr,θ)=0であることを示している。
【0022】
前述した式(7)及び式(8)を用いることにより、解像度m、方位nの特徴量Lm,nは、以下の式により表される。
【数9】
【0023】
ここで、σはガウス分布における標準偏差を表す。また、km及びθnは、以下の式により表される。
【数10】
Sは解像度の総数、Kは方位の総数、aは拡大率を表す。
【0024】
また、式(9)におけるpは特徴量を算出する際に考慮する直線上の範囲を表し、2σの範囲をカバーする場合は以下の式により表される。
【数11】
尚、特徴量を算出する際に考慮する範囲p及びガウス分布の標準偏差σの値は、適用するタスクに応じて変更することができる。例えば、画像の種類に応じて変更することができる。
【0025】
図2は、本発明の実施形態により算出される特徴量を説明する図である。本発明の実施形態による画像特徴抽出装置では、注目画素(xc,yc)を通過する傾きθの直線lを設定し、その直線l上において、輝度値の増減が反転するポイント(画素)における輝度値に、ガウス関数gの重みを乗じた上でその総和を算出し、この総和を注目画素に対する特徴量としている。式(9)において、|S(Vi,θn)−S(Vi+1,θn)|×f(Vi,θn)が輝度値の増減が反転するポイントにおける輝度値に相当する。また、(km/σ)exp{−km2i2/2σ2}がガウス関数gの重みに相当する。この重みは、従来のガボールウェーブレットフィルタと同様に注目画素からの距離による平均μ=0、分散σ2の正規分布によって定義される。
【0026】
このように、本発明の実施形態による特徴量算出手法によれば、特徴量は、注目画素(xc,yc)を通過する傾きθの直線上の輝度値に基づいた値であり、直線の長さがNの場合の計算コストは、計算対象が直線上の画素であるからO(N)となる。従来のガボールウェーブレットフィルタによる計算コストがO(N2)であることを考慮すると、計算量を大幅に削減することができる。
【0027】
さらに、本発明の実施形態による特徴量算出手法によれば、直線上において輝度値の増減が反転するポイント、すなわち、式(9)における|S(Vi,θn)−S(Vi+1,θn)|=1となるポイントについてのみ重み付き和を計算し、その他のポイントについては計算しない。したがって、計算コストの減少による計算量の削減に加え、さらに計算量を削減することができる。
【0028】
〔画像特徴抽出装置〕
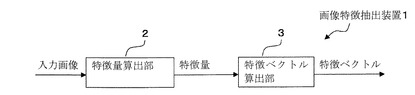
次に、本発明の実施形態による画像特徴抽出装置について説明する。図3は、画像特徴抽出装置の構成を示す概略図である。この画像特徴抽出装置1は、特徴量算出部2及び特徴ベクトル算出部3を備えている。特徴量算出部2は、画像を入力し、その入力画像の各画素に対して前述の式(9)に示した特徴量を算出する。特徴ベクトル算出部3は、特徴量算出部2により算出された特徴量を入力し、その特徴量に基づいて画像領域全体(または一部の領域)に対する特徴ベクトルを算出する。このように、画像特徴抽出装置1は、画像を入力し、その画像の特徴量及び特徴ベクトルを算出し、算出した特徴ベクトルを出力する。
【0029】
〔特徴量〕
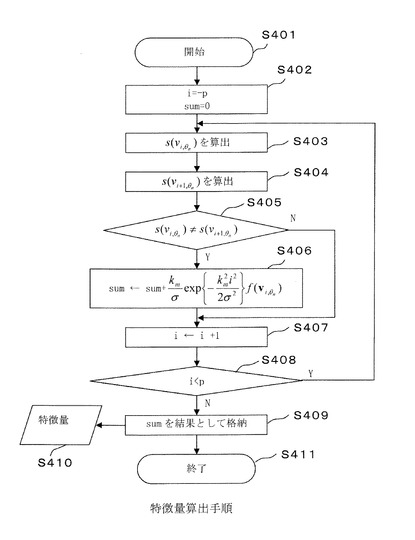
次に、図3に示した特徴量算出部2による特徴量算出手順について説明する。図4は、特徴量算出手順を示すフローチャートである。この特徴量算出手順は、方位nの直線上における注目画素の特徴量を算出する処理を示している。例えば、図2に示した直線l上における注目画素(xc,yc)の特徴量が算出される。
【0030】
特徴量算出処理が開始すると(ステップS401)、特徴量算出部2は、初期処理として、iに−pを設定し、sumに0を設定する(ステップS402)。特徴量算出部2は、座標Vi,θnにおける輝度の増減値S(Vi,θn)を算出し(ステップS403)、座標Vi+1,θnにおける輝度の増減値S(Vi+1,θn)を算出する(ステップS404)。
【0031】
そして、特徴量算出部2は、座標Vi,θnにおける輝度の増減値S(Vi,θn)と座標Vi+1,θnにおける輝度の増減値S(Vi+1,θn)とを比較し、両値が等しくないか否かを判定する(ステップS405)。両値が等しくないと判定した場合(ステップS405:Y)、ステップS406に示す式の演算を行い、sumを算出する(ステップS406)。
【0032】
ステップS405において両値が等しいと判定した場合(ステップS405:N)、または、処理がステップS406から移行した場合、特徴量算出部2は、iにi+1を設定し(ステップS407)、i<pであるか否かを判定する(ステップS408)。ここで、pは、特徴量を算出する際に考慮する直線上の範囲を示す。
【0033】
ステップ408においてi<pであると判定した場合(ステップS408:Y)、特徴量算出部2は、処理をステップS403へ移行し、i<pである限り、ステップS403からステップS408までの処理を行う。
【0034】
ステップS408においてi>pでないと判定した場合(ステップS408:N)、特徴量算出部2は、ステップS406にて算出したsumを特徴量として記憶部に格納する(ステップS409)。これにより、方位nの直線における注目画素の特徴量が記憶部に格納される(ステップS410)。そして、特徴量算出処理が終了する(ステップS411)。このような処理を、画像全体の領域または一部の領域を構成する画素、全ての解像度及び全ての方位について行うことにより、解像度m及び方位nにおける注目画素(xc,yc)の特徴量がそれぞれ算出される。
【0035】
このように、特徴量算出部2は、外部から入力した画像の各画素に対して、前述の式(9)により特徴量を算出する。特徴量算出部2により算出された特徴量(解像度m及び方位nにおける注目画素(xc,yc)の特徴量)は特徴ベクトル算出部3へ出力される。
【0036】
〔特徴ベクトル〕
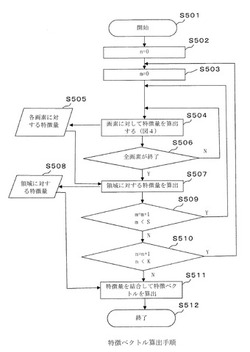
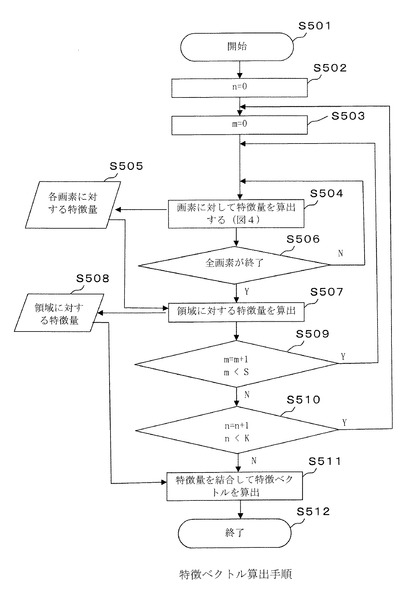
次に、図2に示した特徴量算出部2による特徴量の算出手順を利用した、図3に示した特徴ベクトル算出部3による特徴ベクトル算出手順について説明する。図5は、特徴ベクトル算出手順を示すフローチャートである。図5において、ステップS502からステップS506までは特徴量算出部2による処理であり、ステップS507からステップS511が特徴ベクトル算出部3による処理である。この特徴ベクトル算出手順は、特徴量算出部2により算出された特徴量に基づいて、画像全体の領域または一部の領域に対する特徴ベクトルを算出する処理を示している。
【0037】
特徴ベクトル算出手順が開始すると(ステップS501)、特徴量算出部2は、初期処理として方向nに0を設定し(ステップS502)、解像度mに0を設定する(ステップS503)。そして、特徴量算出部2は、図4に示した特徴量算出手順により、解像度mにおいて、方位nの直線における注目画素の特徴量を算出し、記憶部に格納する(ステップS504,505)。
【0038】
そして、特徴量算出部2は、画像全体の領域または一部の領域を構成する全画素に対する特徴量の算出が終了したか否かを判定する(ステップS506)。全画素に対する特徴量の算出が終了していないと判定した場合(ステップS506:N)、特徴量算出部2は、処理をステップS504へ移行して次の注目画素の特徴量を算出し、全画素に対する特徴量の算出が終了するまで、ステップS504及びステップS506の処理を行う。
【0039】
ステップS506において全画素に対する特徴量の算出が終了したと判定した場合、すなわち、解像度m及び方位nにおける全画素に対する特徴量の算出が終了したと判定した場合(ステップS506:Y)、特徴ベクトル算出部3は、記憶部から、解像度mにおいて方位nの直線における注目画素の特徴量を全画素分読み出し、前記画素を構成する領域に対する特徴量(特徴ベクトル)を算出し(ステップS507)、記憶部に格納する(ステップS508)。
【0040】
そして、特徴ベクトル算出部3は、解像度mにm+1を設定し、解像度m<解像度の総数Sであるか否かを判定する(ステップS509)。解像度m<解像度の総数Sであると判定した場合(ステップS509:Y)、特徴ベクトル算出部3は、処理をステップS504へ移行し、解像度m<解像度の総数Sでないと判定するまで、ステップS504からステップS509までの処理が行われる。
【0041】
ステップS509において解像度m<解像度の総数Sでないと判定した場合(ステップS509:N)、特徴ベクトル算出部3は、方位nにn+1を設定し、方位n<方位の総数Kであるか否かを判定する(ステップS510)。方位n<方位の総数Kであると判定した場合(ステップS510:Y)、特徴ベクトル算出部3は、処理をステップS503へ移行し、方位n<方位の総数Kでないと判定するまで、ステップS503からステップS510までの処理が行われる。
【0042】
ステップS510において方位n<方位の総数Kでないと判定した場合(ステップS510:N)、特徴ベクトル算出部3は、記憶部から、解像度m=0〜S−1において、方位n=0〜K−1の領域に対する特徴量(特徴ベクトル)を読み出し、これらの特徴量(特徴ベクトル)を結合して特徴ベクトルを算出する(ステップS512)。
【0043】
このように、特徴ベクトル算出部3は、特徴量算出部2から入力した特徴量に基づいて、画像全体の領域または一部の領域に対する特徴ベクトルを算出する。特徴ベクトル算出部3により算出された特徴ベクトルは外部へ出力される。
【0044】
この特徴ベクトルの要素としては、画像領域の各画素に対する特徴量の平均、分散または頻度ヒストグラム等がある。特徴ベクトル算出部3は、特徴ベクトルの要素を、様々な方位及び解像度の組み合わせに対して算出し、その結果を結合して特徴ベクトルを算出する。結合の方法としては、それぞれの特徴量を単純に並べる方法、全てを足し合わせて平均を算出する等がある。
【0045】
例えば、解像度m、方位nの特徴量における平均値、分散をそれぞれμm,n、σm,nとすると、これらを並べたものを特徴ベクトルとする場合、以下の式により表される。
【数12】
【0046】
この場合の平均値μm,n及び分散σm,nは、以下の式により表される。
【数13】
【数14】
ここで、Lm,n(x,y)は、式(9)に示したように、注目画素(x,y)における特徴量を表す。
【0047】
また、それぞれの結果(解像度m、方位nの特徴量における平均値、分散)の平均値を特徴ベクトルとする場合は、以下の式により表される。
【数15】
【0048】
〔実験結果〕
次に、従来のガボールウェーブレットフィルタを用いた手法による画像分類の結果と、本発明の実施形態による画像特徴抽出装置1の手法による画像分類の結果とを比較する。この比較実験のタスクは、動物番組の映像におけるキーフレーム画像において、そのブロック領域(64×64画素)を、動物が映っているクラス(クラス1)または動物が映っていないクラス(クラス0)のいずれかにランダムフォレスト法を用いて分類するように設定されているものとする。番組の前半部分の20分間では、映像が学習データとして用いられ、番組の後半部分の20分間では、映像がテストデータとして用いられる。特徴ベクトルは、畳み込み結果における平均値及び分散を並べたものが利用され、解像度の総数S=4,方向の総数K=6、標準偏差σ=2.5、拡大率a=√2とする。比較の指標としての再現率及び適合率は、以下の式により表される。
【数16】
【0049】
比較結果を表1及び表2に表す。
【表1】
【表2】
【0050】
表1及び表2に示した実験結果から、本発明の実施形態におけるクラス1の再現率が従来技術よりも3%程度低いが、ほぼ同等の分類精度であることがわかる。また、クラス1の適合率については、単一のテクスチャ特徴では十分に誤検出が除外できないことから、本発明の実施形態及び従来技術のいずれにおいても低い値であることがわかる。
【0051】
また、各ブロック領域に対する特徴量の平均計算時間を表3に示す。尚、実験には、一般的な計算機(CPU:Intel(登録商標) Core 2 Duo 2.40GHz)を使用した。
【表3】
表3に示した実験結果から、特徴ベクトルの算出に要した時間は、従来技術では96.48ミリ秒であるのに対し、本発明の実施形態では9.69ミリ秒であり、従来技術の約10分の1となっていることがわかる。したがって、本発明の実施形態の方が従来技術よりも、高速な演算が可能である。
【0052】
以上のように、本発明の実施形態による画像特徴抽出装置1によれば、画像の周波数及び方位を考慮した特徴量及び特徴ベクトルを、従来のガボールウェーブレットフィルタによる手法と同等の精度で算出することができると共に、従来よりも少ない計算量かつ短時間で算出することができる。この場合、画像の周波数を考慮するとは、前記実施形態において、注目画素を通過する直線上における輝度値の増減が反転する画素のみが特徴量の算出対象となることを意味し、方位を考慮するとは、前記実施形態において、方位nの直線が設定され、その直線上の画素のみが特徴量の算出対象となることを意味する。
【0053】
尚、前記画像特徴抽出装置1は、画像がグレーの場合を想定して、輝度値の増減の変化に基づいて、注目画素に対する特徴量を算出するようにしたが、画像がカラーの場合には、輝度値の代わりに画素値を用いることにより、注目画素に対する特徴量を算出する。この場合、前述した式(8)及び式(9)のf(V)は画素値を表す。
【0054】
また、前記画像特徴抽出装置1は、画像の周波数及び方位を考慮した特徴量及び特徴ベクトルを算出するようにしたから、模様が強調された画像に対して特徴量等を算出する場合に好適である。
【0055】
以上、実施形態を挙げて本発明を説明したが、本発明は前記実施形態に限定されるものではなく、その技術思想を逸脱しない範囲で種々変形可能である。例えば、本発明の実施形態による画像特徴抽出装置1の特徴量算出部2は、式(9)を用いて特徴量を算出するようにしたが、本発明はこれに限定されるものではない。要するに、画像の周波数及び方向を考慮した式を用いて特徴量を算出することができればよい。
【0056】
また、本発明の実施形態による画像特徴抽出装置1の特徴ベクトル算出部3は、式(12)に示すように、特徴量の平均値及び分散を並べた特徴ベクトル、または、式(15)に示すように、特徴量の平均値をさらに平均した値及び分散の平均値からなる特徴ベクトルを算出するようにしたが、本発明はこれに限定されるものでない。要するに、特徴量に基づいたベクトルであって、画像の全体領域または一部の領域の特徴を表すものであればよい。
【図面の簡単な説明】
【0057】
【図1】ガボールウェーブレットフィルタによるフィルタ値の例を示す図である。
【図2】本発明の実施形態により算出される特徴量を説明する図である。
【図3】本発明の実施形態による画像特徴抽出装置の構成を示す概略図である。
【図4】特徴量算出部により特徴量を算出する手順を示すフローチャートである。
【図5】特徴ベクトル算出部により特徴ベクトルを算出する手順を示すフローチャートである。
【符号の説明】
【0058】
1 画像特徴抽出装置
2 特徴量算出部
3 特徴ベクトル算出部
【技術分野】
【0001】
本発明は、画像の類似判定、クラスタリング、映像内のオブジェクト追跡等を行うために、その画像または画像の部分領域の特徴を抽出する装置に関し、特に、画像の周波数及び方向を考慮した特徴を抽出する技術に関する。
【背景技術】
【0002】
従来、画像の類似性を判定する処理、画像をクラスタリングする処理、映像内のオブジェクトを追跡する処理等の様々な画像処理を行うために、画像または画像の部分領域の特徴量を算出する技術が知られている。例えば、ガボールウェーブレットフィルタは、画像の周波数及び方向を考慮した特徴量を算出するフィルタであり、前述した様々な画像処理に利用されている。
【0003】
ガボールウェーブレットフィルタは、解像度をm、方位をnとすると、以下の式で定義される。
【数1】
【数2】
ここで、gmn(x,y)はある画素(以下、注目画素という。)の座標(x,y)におけるガボールウェーブレットフィルタの値、σはガウス分布における標準偏差、aは拡大率、Sは解像度の総数、Kは方位の総数をそれぞれ表す。
【0004】
図1は、ガボールウェーブレットフィルタの例を示す図である。図1によれば、ガボールウェーブレットフィルタは、周波数成分と方向エッジの選択性が強く、エッジ抽出制御が容易であることがわかる。つまり、ガボールウェーブレットフィルタを画像に適用することによりガボール空間を得ることができ、ガボール空間において、画像の周波数及び方向を考慮した特徴量を算出することができる。
【0005】
このようなガボールウェーブレットフィルタを用いた特徴量の算出手法の例が、非特許文献1に記載されている。具体的には、特徴量は、注目画素(x,y)におけるそれぞれの解像度m及び方位nの組み合わせについて、ガボールウェーブレットフィルタを対象画像領域内の全画素(x,y)に対して畳み込むことにより算出される。
【数3】
ここで、Wmn(x,y)は特徴量、f(x,y)は座標(x,y)における輝度値をそれぞれ表す。
【0006】
そして、式(3)により算出された特徴量Wmn(x,y)である畳み込みの結果を用いて平均値μ及び標準偏差σが算出され、それぞれ解像度m及び方位n毎に並べることにより、式(4)に示す特徴ベクトルが算出される。ここで、特徴量Wmn(x,y)は、ガボールウェーブレットフィルタgmn(x,y)にマッチした成分が反映された値となる。
【数4】
【0007】
ここで、μm,n及びσm,nは、以下の式により算出される。
【数5】
【数6】
式(3)及び式(4)中のH,Wは、それぞれ対象画像領域の高さ、幅を表す。
【0008】
【非特許文献1】Yanagawa. A, Chang. S.F, Kennedy. L, Hsu. W, “Columbia University’s baseline detectors for 374 LSCOM semantic visual concept,” Technical report, Columbia University (2007)
【発明の開示】
【発明が解決しようとする課題】
【0009】
しかしながら、ガボールウェーブレットフィルタを用いた算出手法では、そのサイズをN×Nピクセルとした場合、特徴量は全ての画素について算出されるから、特徴量の算出時間はO(N2)となり、計算コストが非常に高いという問題があった。このため、例えば、多数の画像を分類する場合、またはサイズの大きい画像を扱う場合には、特徴量の算出のために多大な計算量と時間が必要となる。ここで、O(N2)は、算出時間の関数であり、N2に比例していることを示している。
【0010】
そこで、本発明は前記課題を解決するためになされたものであり、その目的は、画像の周波数及び方向を考慮した特徴を、従来よりも少ない計算量かつ短時間で抽出することが可能な画像特徴抽出装置を提供することにある。
【課題を解決するための手段】
【0011】
本発明者らは、上記目的を達成すべく研究開発を進めた結果、画像の周波数及び方向を考慮した特徴を、その方向の直線上の画素についてのみ算出することに着目し、従来のガボールウェーブレットフィルタを用いた場合に比べて少ない計算量かつ短時間で抽出する手法を見出した。具体的には、その手法は、注目画素を通過する直線を設定し、その直線上において輝度値の増減が反転する画素を特定し、その画素の輝度値及びガウス関数に基づいて特徴量を算出するものである。従来のガボールウェーブレットフィルタを用いた算出手法では、そのサイズをN×Nピクセルとした場合の計算コストがO(N2)であるのに対し、本発明による算出手法では、計算コストがO(N)となる。また、本発明による算出手法では、輝度値の増減が反転しない画素についての演算が不要になる。したがって、画像の周波数及び方向を考慮した特徴を、従来に比べて少ない計算量かつ短時間で抽出することが可能となる。
【0012】
すなわち、本発明による請求項1の発明は、画像の特徴を抽出する画像特徴抽出装置において、前記画像内の注目画素を通過する直線を設定し、前記直線上において輝度値の増減が反転する画素を特定し、前記特定した画素の輝度値、及び前記特定した画素におけるガウス関数の重みに基づいて、前記注目画素の特徴を抽出する、ことを特徴とする。
【0013】
また、本発明による請求項2の発明は、請求項1に記載の画像特徴抽出装置において、所定の解像度における前記画像内の注目画素について、前記注目画素を通過する直線を方位によって設定し、前記直線上において輝度値が反転する画素を、隣り合う画素の輝度値の変化によって特定し、前記注目画素を中心とした直線上の所定の範囲内で、前記特定した画素の輝度値、及び、前記注目画素の位置を平均としたガウス関数による重みに基づいて、前記直線における注目画素の特徴量を算出する特徴量算出部、を備えたことを特徴とする。
【0014】
また、本発明による請求項3の発明は、請求項2に記載の画像特徴抽出装置において、前記特徴量算出部が、画像内の全ての画素または一部の画素について、所定の解像度毎に及び所定の方位毎に前記直線における注目画素の特徴量を算出する、ことを特徴する。
【0015】
また、本発明による請求項4の発明は、請求項2または3に記載の画像特徴抽出装置において、前記特徴量算出部により算出された特徴量に基づいて、前記画像内の全領域または一部の領域の特徴を示す特徴ベクトルを算出する特徴ベクトル算出部、を備えたことを特徴とする。
【0016】
また、本発明による請求項5の発明は、請求項4に記載の画像特徴抽出装置において、前記特徴ベクトル算出部が算出する特徴ベクトルを、前記特徴量における平均値及び分散を要素とするベクトル、または、前記特徴量における平均値に基づいて算出した値及び分散に基づいて算出した値を要素とするベクトルとする、ことを特徴とする。
【0017】
また、本発明による請求項6の発明は、請求項1から5までのいずれか一項に記載の画像特徴抽出装置において、前記輝度値の代わりに画素値を用いる、ことを特徴とする。
【発明の効果】
【0018】
以上のように、本発明によれば、画像の周波数及び方向を考慮した特徴を、従来よりも少ない計算量かつ短時間で抽出することが可能となる。
【発明を実施するための最良の形態】
【0019】
以下、本発明を実施するための最良の形態について図面を用いて詳細に説明する。
〔特徴量算出手法〕
まず、本発明の実施形態による、画像の特徴量を算出する手法について説明する。画像特徴抽出装置は、画像を構成する注目画素を通過する直線上において、輝度値の増減の変化に基づいて、その注目画素に対する特徴量を算出する。
【0020】
x,y軸における注目画素の座標を(xc,yc)とした場合、注目画素からの距離r、角度θの位置に存在する画素の座標は、以下の式により表される。この場合、設定する直線は、注目画素を通過し、かつy軸との間の角度がθとなる直線である。
【数7】
【0021】
また、座標Vr,θにおける輝度の増減値は、以下の式により表される。
【数8】
ここで、f(v)は座標Vr,θにおける画素の輝度値を表す。式(8)は、座標Vr,θにおける輝度の増減値S(Vr,θ)が1または0であり、設定した直線において距離rを増加させた場合、輝度値が増加するときまたは変化がないときにS(Vr,θ)=1であり、輝度値が減少するときにS(Vr,θ)=0であることを示している。
【0022】
前述した式(7)及び式(8)を用いることにより、解像度m、方位nの特徴量Lm,nは、以下の式により表される。
【数9】
【0023】
ここで、σはガウス分布における標準偏差を表す。また、km及びθnは、以下の式により表される。
【数10】
Sは解像度の総数、Kは方位の総数、aは拡大率を表す。
【0024】
また、式(9)におけるpは特徴量を算出する際に考慮する直線上の範囲を表し、2σの範囲をカバーする場合は以下の式により表される。
【数11】
尚、特徴量を算出する際に考慮する範囲p及びガウス分布の標準偏差σの値は、適用するタスクに応じて変更することができる。例えば、画像の種類に応じて変更することができる。
【0025】
図2は、本発明の実施形態により算出される特徴量を説明する図である。本発明の実施形態による画像特徴抽出装置では、注目画素(xc,yc)を通過する傾きθの直線lを設定し、その直線l上において、輝度値の増減が反転するポイント(画素)における輝度値に、ガウス関数gの重みを乗じた上でその総和を算出し、この総和を注目画素に対する特徴量としている。式(9)において、|S(Vi,θn)−S(Vi+1,θn)|×f(Vi,θn)が輝度値の増減が反転するポイントにおける輝度値に相当する。また、(km/σ)exp{−km2i2/2σ2}がガウス関数gの重みに相当する。この重みは、従来のガボールウェーブレットフィルタと同様に注目画素からの距離による平均μ=0、分散σ2の正規分布によって定義される。
【0026】
このように、本発明の実施形態による特徴量算出手法によれば、特徴量は、注目画素(xc,yc)を通過する傾きθの直線上の輝度値に基づいた値であり、直線の長さがNの場合の計算コストは、計算対象が直線上の画素であるからO(N)となる。従来のガボールウェーブレットフィルタによる計算コストがO(N2)であることを考慮すると、計算量を大幅に削減することができる。
【0027】
さらに、本発明の実施形態による特徴量算出手法によれば、直線上において輝度値の増減が反転するポイント、すなわち、式(9)における|S(Vi,θn)−S(Vi+1,θn)|=1となるポイントについてのみ重み付き和を計算し、その他のポイントについては計算しない。したがって、計算コストの減少による計算量の削減に加え、さらに計算量を削減することができる。
【0028】
〔画像特徴抽出装置〕
次に、本発明の実施形態による画像特徴抽出装置について説明する。図3は、画像特徴抽出装置の構成を示す概略図である。この画像特徴抽出装置1は、特徴量算出部2及び特徴ベクトル算出部3を備えている。特徴量算出部2は、画像を入力し、その入力画像の各画素に対して前述の式(9)に示した特徴量を算出する。特徴ベクトル算出部3は、特徴量算出部2により算出された特徴量を入力し、その特徴量に基づいて画像領域全体(または一部の領域)に対する特徴ベクトルを算出する。このように、画像特徴抽出装置1は、画像を入力し、その画像の特徴量及び特徴ベクトルを算出し、算出した特徴ベクトルを出力する。
【0029】
〔特徴量〕
次に、図3に示した特徴量算出部2による特徴量算出手順について説明する。図4は、特徴量算出手順を示すフローチャートである。この特徴量算出手順は、方位nの直線上における注目画素の特徴量を算出する処理を示している。例えば、図2に示した直線l上における注目画素(xc,yc)の特徴量が算出される。
【0030】
特徴量算出処理が開始すると(ステップS401)、特徴量算出部2は、初期処理として、iに−pを設定し、sumに0を設定する(ステップS402)。特徴量算出部2は、座標Vi,θnにおける輝度の増減値S(Vi,θn)を算出し(ステップS403)、座標Vi+1,θnにおける輝度の増減値S(Vi+1,θn)を算出する(ステップS404)。
【0031】
そして、特徴量算出部2は、座標Vi,θnにおける輝度の増減値S(Vi,θn)と座標Vi+1,θnにおける輝度の増減値S(Vi+1,θn)とを比較し、両値が等しくないか否かを判定する(ステップS405)。両値が等しくないと判定した場合(ステップS405:Y)、ステップS406に示す式の演算を行い、sumを算出する(ステップS406)。
【0032】
ステップS405において両値が等しいと判定した場合(ステップS405:N)、または、処理がステップS406から移行した場合、特徴量算出部2は、iにi+1を設定し(ステップS407)、i<pであるか否かを判定する(ステップS408)。ここで、pは、特徴量を算出する際に考慮する直線上の範囲を示す。
【0033】
ステップ408においてi<pであると判定した場合(ステップS408:Y)、特徴量算出部2は、処理をステップS403へ移行し、i<pである限り、ステップS403からステップS408までの処理を行う。
【0034】
ステップS408においてi>pでないと判定した場合(ステップS408:N)、特徴量算出部2は、ステップS406にて算出したsumを特徴量として記憶部に格納する(ステップS409)。これにより、方位nの直線における注目画素の特徴量が記憶部に格納される(ステップS410)。そして、特徴量算出処理が終了する(ステップS411)。このような処理を、画像全体の領域または一部の領域を構成する画素、全ての解像度及び全ての方位について行うことにより、解像度m及び方位nにおける注目画素(xc,yc)の特徴量がそれぞれ算出される。
【0035】
このように、特徴量算出部2は、外部から入力した画像の各画素に対して、前述の式(9)により特徴量を算出する。特徴量算出部2により算出された特徴量(解像度m及び方位nにおける注目画素(xc,yc)の特徴量)は特徴ベクトル算出部3へ出力される。
【0036】
〔特徴ベクトル〕
次に、図2に示した特徴量算出部2による特徴量の算出手順を利用した、図3に示した特徴ベクトル算出部3による特徴ベクトル算出手順について説明する。図5は、特徴ベクトル算出手順を示すフローチャートである。図5において、ステップS502からステップS506までは特徴量算出部2による処理であり、ステップS507からステップS511が特徴ベクトル算出部3による処理である。この特徴ベクトル算出手順は、特徴量算出部2により算出された特徴量に基づいて、画像全体の領域または一部の領域に対する特徴ベクトルを算出する処理を示している。
【0037】
特徴ベクトル算出手順が開始すると(ステップS501)、特徴量算出部2は、初期処理として方向nに0を設定し(ステップS502)、解像度mに0を設定する(ステップS503)。そして、特徴量算出部2は、図4に示した特徴量算出手順により、解像度mにおいて、方位nの直線における注目画素の特徴量を算出し、記憶部に格納する(ステップS504,505)。
【0038】
そして、特徴量算出部2は、画像全体の領域または一部の領域を構成する全画素に対する特徴量の算出が終了したか否かを判定する(ステップS506)。全画素に対する特徴量の算出が終了していないと判定した場合(ステップS506:N)、特徴量算出部2は、処理をステップS504へ移行して次の注目画素の特徴量を算出し、全画素に対する特徴量の算出が終了するまで、ステップS504及びステップS506の処理を行う。
【0039】
ステップS506において全画素に対する特徴量の算出が終了したと判定した場合、すなわち、解像度m及び方位nにおける全画素に対する特徴量の算出が終了したと判定した場合(ステップS506:Y)、特徴ベクトル算出部3は、記憶部から、解像度mにおいて方位nの直線における注目画素の特徴量を全画素分読み出し、前記画素を構成する領域に対する特徴量(特徴ベクトル)を算出し(ステップS507)、記憶部に格納する(ステップS508)。
【0040】
そして、特徴ベクトル算出部3は、解像度mにm+1を設定し、解像度m<解像度の総数Sであるか否かを判定する(ステップS509)。解像度m<解像度の総数Sであると判定した場合(ステップS509:Y)、特徴ベクトル算出部3は、処理をステップS504へ移行し、解像度m<解像度の総数Sでないと判定するまで、ステップS504からステップS509までの処理が行われる。
【0041】
ステップS509において解像度m<解像度の総数Sでないと判定した場合(ステップS509:N)、特徴ベクトル算出部3は、方位nにn+1を設定し、方位n<方位の総数Kであるか否かを判定する(ステップS510)。方位n<方位の総数Kであると判定した場合(ステップS510:Y)、特徴ベクトル算出部3は、処理をステップS503へ移行し、方位n<方位の総数Kでないと判定するまで、ステップS503からステップS510までの処理が行われる。
【0042】
ステップS510において方位n<方位の総数Kでないと判定した場合(ステップS510:N)、特徴ベクトル算出部3は、記憶部から、解像度m=0〜S−1において、方位n=0〜K−1の領域に対する特徴量(特徴ベクトル)を読み出し、これらの特徴量(特徴ベクトル)を結合して特徴ベクトルを算出する(ステップS512)。
【0043】
このように、特徴ベクトル算出部3は、特徴量算出部2から入力した特徴量に基づいて、画像全体の領域または一部の領域に対する特徴ベクトルを算出する。特徴ベクトル算出部3により算出された特徴ベクトルは外部へ出力される。
【0044】
この特徴ベクトルの要素としては、画像領域の各画素に対する特徴量の平均、分散または頻度ヒストグラム等がある。特徴ベクトル算出部3は、特徴ベクトルの要素を、様々な方位及び解像度の組み合わせに対して算出し、その結果を結合して特徴ベクトルを算出する。結合の方法としては、それぞれの特徴量を単純に並べる方法、全てを足し合わせて平均を算出する等がある。
【0045】
例えば、解像度m、方位nの特徴量における平均値、分散をそれぞれμm,n、σm,nとすると、これらを並べたものを特徴ベクトルとする場合、以下の式により表される。
【数12】
【0046】
この場合の平均値μm,n及び分散σm,nは、以下の式により表される。
【数13】
【数14】
ここで、Lm,n(x,y)は、式(9)に示したように、注目画素(x,y)における特徴量を表す。
【0047】
また、それぞれの結果(解像度m、方位nの特徴量における平均値、分散)の平均値を特徴ベクトルとする場合は、以下の式により表される。
【数15】
【0048】
〔実験結果〕
次に、従来のガボールウェーブレットフィルタを用いた手法による画像分類の結果と、本発明の実施形態による画像特徴抽出装置1の手法による画像分類の結果とを比較する。この比較実験のタスクは、動物番組の映像におけるキーフレーム画像において、そのブロック領域(64×64画素)を、動物が映っているクラス(クラス1)または動物が映っていないクラス(クラス0)のいずれかにランダムフォレスト法を用いて分類するように設定されているものとする。番組の前半部分の20分間では、映像が学習データとして用いられ、番組の後半部分の20分間では、映像がテストデータとして用いられる。特徴ベクトルは、畳み込み結果における平均値及び分散を並べたものが利用され、解像度の総数S=4,方向の総数K=6、標準偏差σ=2.5、拡大率a=√2とする。比較の指標としての再現率及び適合率は、以下の式により表される。
【数16】
【0049】
比較結果を表1及び表2に表す。
【表1】
【表2】
【0050】
表1及び表2に示した実験結果から、本発明の実施形態におけるクラス1の再現率が従来技術よりも3%程度低いが、ほぼ同等の分類精度であることがわかる。また、クラス1の適合率については、単一のテクスチャ特徴では十分に誤検出が除外できないことから、本発明の実施形態及び従来技術のいずれにおいても低い値であることがわかる。
【0051】
また、各ブロック領域に対する特徴量の平均計算時間を表3に示す。尚、実験には、一般的な計算機(CPU:Intel(登録商標) Core 2 Duo 2.40GHz)を使用した。
【表3】
表3に示した実験結果から、特徴ベクトルの算出に要した時間は、従来技術では96.48ミリ秒であるのに対し、本発明の実施形態では9.69ミリ秒であり、従来技術の約10分の1となっていることがわかる。したがって、本発明の実施形態の方が従来技術よりも、高速な演算が可能である。
【0052】
以上のように、本発明の実施形態による画像特徴抽出装置1によれば、画像の周波数及び方位を考慮した特徴量及び特徴ベクトルを、従来のガボールウェーブレットフィルタによる手法と同等の精度で算出することができると共に、従来よりも少ない計算量かつ短時間で算出することができる。この場合、画像の周波数を考慮するとは、前記実施形態において、注目画素を通過する直線上における輝度値の増減が反転する画素のみが特徴量の算出対象となることを意味し、方位を考慮するとは、前記実施形態において、方位nの直線が設定され、その直線上の画素のみが特徴量の算出対象となることを意味する。
【0053】
尚、前記画像特徴抽出装置1は、画像がグレーの場合を想定して、輝度値の増減の変化に基づいて、注目画素に対する特徴量を算出するようにしたが、画像がカラーの場合には、輝度値の代わりに画素値を用いることにより、注目画素に対する特徴量を算出する。この場合、前述した式(8)及び式(9)のf(V)は画素値を表す。
【0054】
また、前記画像特徴抽出装置1は、画像の周波数及び方位を考慮した特徴量及び特徴ベクトルを算出するようにしたから、模様が強調された画像に対して特徴量等を算出する場合に好適である。
【0055】
以上、実施形態を挙げて本発明を説明したが、本発明は前記実施形態に限定されるものではなく、その技術思想を逸脱しない範囲で種々変形可能である。例えば、本発明の実施形態による画像特徴抽出装置1の特徴量算出部2は、式(9)を用いて特徴量を算出するようにしたが、本発明はこれに限定されるものではない。要するに、画像の周波数及び方向を考慮した式を用いて特徴量を算出することができればよい。
【0056】
また、本発明の実施形態による画像特徴抽出装置1の特徴ベクトル算出部3は、式(12)に示すように、特徴量の平均値及び分散を並べた特徴ベクトル、または、式(15)に示すように、特徴量の平均値をさらに平均した値及び分散の平均値からなる特徴ベクトルを算出するようにしたが、本発明はこれに限定されるものでない。要するに、特徴量に基づいたベクトルであって、画像の全体領域または一部の領域の特徴を表すものであればよい。
【図面の簡単な説明】
【0057】
【図1】ガボールウェーブレットフィルタによるフィルタ値の例を示す図である。
【図2】本発明の実施形態により算出される特徴量を説明する図である。
【図3】本発明の実施形態による画像特徴抽出装置の構成を示す概略図である。
【図4】特徴量算出部により特徴量を算出する手順を示すフローチャートである。
【図5】特徴ベクトル算出部により特徴ベクトルを算出する手順を示すフローチャートである。
【符号の説明】
【0058】
1 画像特徴抽出装置
2 特徴量算出部
3 特徴ベクトル算出部
【特許請求の範囲】
【請求項1】
画像の特徴を抽出する画像特徴抽出装置において、
前記画像内の注目画素を通過する直線を設定し、前記直線上において輝度値の増減が反転する画素を特定し、前記特定した画素の輝度値、及び前記特定した画素におけるガウス関数の重みに基づいて、前記注目画素の特徴を抽出する、ことを特徴とする画像特徴抽出装置。
【請求項2】
請求項1に記載の画像特徴抽出装置において、
所定の解像度における前記画像内の注目画素について、前記注目画素を通過する直線を方位によって設定し、前記直線上において輝度値が反転する画素を、隣り合う画素の輝度値の変化によって特定し、前記注目画素を中心とした直線上の所定の範囲内で、前記特定した画素の輝度値、及び、前記注目画素の位置を平均としたガウス関数による重みに基づいて、前記直線における注目画素の特徴量を算出する特徴量算出部、を備えたことを特徴とする画像特徴抽出装置。
【請求項3】
請求項2に記載の画像特徴抽出装置において、
前記特徴量算出部は、画像内の全ての画素または一部の画素について、所定の解像度毎に及び所定の方位毎に前記直線における注目画素の特徴量を算出する、ことを特徴する画像特徴抽出装置。
【請求項4】
請求項2または3に記載の画像特徴抽出装置において、
前記特徴量算出部により算出された特徴量に基づいて、前記画像内の全領域または一部の領域の特徴を示す特徴ベクトルを算出する特徴ベクトル算出部、を備えたことを特徴とする画像特徴抽出装置。
【請求項5】
請求項4に記載の画像特徴抽出装置において、
前記特徴ベクトル算出部が算出する特徴ベクトルを、前記特徴量における平均値及び分散を要素とするベクトル、または、前記特徴量における平均値に基づいて算出した値及び分散に基づいて算出した値を要素とするベクトルとする、ことを特徴とする画像特徴抽出装置。
【請求項6】
請求項1から5までのいずれか一項に記載の画像特徴抽出装置において、
前記輝度値の代わりに画素値を用いる、ことを特徴とする画像特徴抽出装置。
【請求項1】
画像の特徴を抽出する画像特徴抽出装置において、
前記画像内の注目画素を通過する直線を設定し、前記直線上において輝度値の増減が反転する画素を特定し、前記特定した画素の輝度値、及び前記特定した画素におけるガウス関数の重みに基づいて、前記注目画素の特徴を抽出する、ことを特徴とする画像特徴抽出装置。
【請求項2】
請求項1に記載の画像特徴抽出装置において、
所定の解像度における前記画像内の注目画素について、前記注目画素を通過する直線を方位によって設定し、前記直線上において輝度値が反転する画素を、隣り合う画素の輝度値の変化によって特定し、前記注目画素を中心とした直線上の所定の範囲内で、前記特定した画素の輝度値、及び、前記注目画素の位置を平均としたガウス関数による重みに基づいて、前記直線における注目画素の特徴量を算出する特徴量算出部、を備えたことを特徴とする画像特徴抽出装置。
【請求項3】
請求項2に記載の画像特徴抽出装置において、
前記特徴量算出部は、画像内の全ての画素または一部の画素について、所定の解像度毎に及び所定の方位毎に前記直線における注目画素の特徴量を算出する、ことを特徴する画像特徴抽出装置。
【請求項4】
請求項2または3に記載の画像特徴抽出装置において、
前記特徴量算出部により算出された特徴量に基づいて、前記画像内の全領域または一部の領域の特徴を示す特徴ベクトルを算出する特徴ベクトル算出部、を備えたことを特徴とする画像特徴抽出装置。
【請求項5】
請求項4に記載の画像特徴抽出装置において、
前記特徴ベクトル算出部が算出する特徴ベクトルを、前記特徴量における平均値及び分散を要素とするベクトル、または、前記特徴量における平均値に基づいて算出した値及び分散に基づいて算出した値を要素とするベクトルとする、ことを特徴とする画像特徴抽出装置。
【請求項6】
請求項1から5までのいずれか一項に記載の画像特徴抽出装置において、
前記輝度値の代わりに画素値を用いる、ことを特徴とする画像特徴抽出装置。
【図1】

【図2】

【図3】
【図4】
【図5】
【図2】
【図3】
【図4】
【図5】
【公開番号】特開2010−72889(P2010−72889A)
【公開日】平成22年4月2日(2010.4.2)
【国際特許分類】
【出願番号】特願2008−238788(P2008−238788)
【出願日】平成20年9月18日(2008.9.18)
【出願人】(000004352)日本放送協会 (2,206)
【Fターム(参考)】
【公開日】平成22年4月2日(2010.4.2)
【国際特許分類】
【出願日】平成20年9月18日(2008.9.18)
【出願人】(000004352)日本放送協会 (2,206)
【Fターム(参考)】
[ Back to top ]