
画像生成装置
【課題】設計データを制約条件として用い単調なパターンでも精度の良い連結画像を生成することを目的とする。設計データと画像データとのマッチングで大まかに基準位置を求めて、設計データとのズレ量を検索範囲として、隣接画像間でのマッチングを行い高速で精度の良い連結画像を生成する。
【解決手段】本発明の画像生成方法は、走査型電子顕微鏡を用いて電子デバイスパターンを検査する画像生成方法であって、電子デバイスパターンのレイアウト情報が記述された設計データを入力して記憶した設計データファイルと、撮像位置を変えて前記電子デバイスパターンを撮像して得た複数枚の分割画像データと、前記複数枚の分割画像データと前記設計データファイルの設計データとを用いて前記複数枚の分割画像データを1枚の画像に連結する画像連結手段とで構成される。
【解決手段】本発明の画像生成方法は、走査型電子顕微鏡を用いて電子デバイスパターンを検査する画像生成方法であって、電子デバイスパターンのレイアウト情報が記述された設計データを入力して記憶した設計データファイルと、撮像位置を変えて前記電子デバイスパターンを撮像して得た複数枚の分割画像データと、前記複数枚の分割画像データと前記設計データファイルの設計データとを用いて前記複数枚の分割画像データを1枚の画像に連結する画像連結手段とで構成される。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、試料上の任意の位置を測長走査型電子顕微鏡(Critical-Dimension Scanning Electron Microscope:CD−SEM)等により電子デバイスパターンを撮像して検査を行う画像生成方法及びその装置に関するものである。
【背景技術】
【0002】
半導体ウェハに形成された高精度の配線パターンの出来映えを測定して検査するのに、従来から測長走査型電子顕微鏡(Critical-Dimension Scanning Electron Microscope:CD−SEM)等が広く用いられている。現在、半導体デバイスはプロセスの微細化が進み、65nmの量産が行われている。検査すべき欠陥等も微細化が進むに伴い小さくなり、撮像する際の倍率も高倍率にならざるを得ない。一方、配線パターンのレイアウトシミュレーションを行う際、広範囲で行いたいニーズがある。また、今後、詳細なシミュレーションを行うためには、画像は高倍率で取得したいと思われる。しかし、高倍率で撮像すると画面に入る部分は小さくなるため、広範囲で見ることはできない。
【0003】
また、〔特許文献1〕では低倍率で全体画像を取得した後、高倍率に変えて分割画像を取得する方法が提案されている。この方法では単調なパターンでも全体画像を参考にすることで、貼り合せ位置が特定できる。しかし、倍率を変えて全体画像を読む必要がある。また、マスクを撮像する際は問題ないが、ウェハを撮像すると帯電の問題があり、一度読むと画像が乱れることがあるため、なるべくなら、全体画像を読むことがない方法が好ましい。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2001−128106号公報
【特許文献2】特開2003−098112号公報
【特許文献3】特開2004−333446号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
この問題を解決する方法として、〔特許文献2〕のようにステージの位置情報をもとに画像を複数枚に分割して撮像し貼り合せることで高倍率の詳細な画像を広範囲に得る方法が提案されている。しかし、ステージの移動量はかなり正確ではあるものの、nm単位でみるとズレており、高倍率で撮像した画像を貼り合せるとずれてしまい、貼り合せ位置で線が切れてしまうことになる。詳細なシミュレーションを行うには1画素のズレでも好ましくないため、この方法を用いることはできない。また、〔特許文献3〕は複数の領域について隣接する領域の画像と重なるように撮像し、その重複領域でマッチング処理を行い、整合のとれた高倍率の詳細な画像を広範囲に得ることができる。しかし、配線パターンは単調な画像が多いため、重複領域でマッチング処理を行うとマッチング率の高い、貼り合せの候補点が複数出てくることがある。その場合、どの位置が実際に合わせる位置か判らず、2枚以上で連結すると全体画像では必ず何処かが合わなくなるという問題があった。
【0006】
本発明の課題は、半導体ウェハに形成された高精度の配線パターンの測定して検査する際に、配線パターンのような単調なパターンを測定する際にも、精度の良い連結画像が得られることを目的とするものである。
【課題を解決するための手段】
【0007】
上記課題を達するために、本発明は電子顕微鏡を用いた電子デバイスパターンの画像生成方法において、電子デバイスパターンのレイアウト情報が記述された設計データを記憶すること、撮像位置を変えて前記電子デバイスパターンを撮像して得た複数枚の分割画像データを記憶すること、前記複数枚の分割画像データと前記設計データファイルの設計データとを用いて前記複数枚の分割画像データを1枚の画像に連結することを特徴とするものである。
【0008】
また、本発明の画像生成方法は、前記画像連結を行うに際して、前記電子デバイスパターンを隣り合う画像領域が重なる重複領域を設けて分割して撮像して得た前記複数枚の分割画像データと、撮像した分割画像のパターンを含む設計データとのマッチングを行う第一のマッチング処理と、前記分割画像間の重複領域の画像データを用いてマッチングを行う第二のマッチング処理を行うことを特徴とするものである。
【0009】
また、本発明の画像生成方法は、前記画像連結を行うに際して、前記第一のマッチング処理で、前記第二のマッチング処理で用いるパラメータを求めることを特徴とするものである。
【0010】
また、本発明の画像生成方法は、前記画像連結を行うに際して、第一のマッチング処理で求める第二のマッチング処理のパラメータは基準位置及び検索範囲に関する情報であることを特徴とするものである。
【0011】
更に、上記課題を達するために、本発明は電子顕微鏡を用いた電子デバイスパターンの画像生成装置であって、電子デバイスパターンのレイアウト情報が記述された設計データ記憶手段と、撮像位置を変えて前記電子デバイスパターンを撮像して得た複数枚の分割画像データ記憶手段と、前記複数枚の分割画像データと前記設計データファイルの設計データとを用いて前記複数枚の分割画像データを1枚の画像に連結する画像連結手段とを備えることを特徴とするものである。
【0012】
また、本発明の画像生成装置において、前記画像連結手段は、前記電子デバイスパターンを隣り合う画像領域が重なる重複領域を設けて分割して撮像して得た前記複数枚の分割画像データと、撮像した分割画像のパターンを含む設計データとのマッチングを行う第一のマッチング手段と、前記分割画像間の重複領域の画像データを用いてマッチングを行う第二のマッチング手段とを備えることを特徴とするものである。
【0013】
また、本発明の画像生成装置において、前記画像連結手段は、前記第一のマッチング手段で、前記第二のマッチング手段で用いるパラメータを求めることを特徴とするものである。
【0014】
また、本発明の画像生成装置において、前記画像連結手段の第一のマッチング手段で求める第二のマッチング手段のパラメータは基準位置及び検索範囲に関する情報であることを特徴とするものである。
【0015】
更に、上記課題を達するために、電子顕微鏡を用いた電子デバイスパターンの画像生成装置において、電子デバイスパターンを撮像する撮像手段と、前記撮像手段で撮像する電子デバイスを撮像する位置に移動させる撮像位置制御手段と、電子デバイスパターンのレイアウト情報が記述された設計データ記憶手段と、撮像位置を変えて前記電子デバイスパターンを撮像して得た複数枚の分割画像データを記憶する分割画像データ記憶手段と、該分割画像データ記憶手段に格納されている前記複数枚の分割画像データと前記設計データ記憶手段の設計データとを用いて複数枚の分割画像データを1枚の画像に連結する画像連結手段とを備え、前記撮像位置制御手段は前記設計データを基に撮像する条件を変更することを特徴とするものである。
【0016】
また、本発明の画像生成装置において、前記撮像位置制御手段は、撮像する条件を変える際、予め撮像する画像のパターンを含む設計データを用いて、重複領域となる領域の特徴量を求めて判定し、特徴量が特定の閾値より小さい場合は特徴量がより大きくなる重複領域の大きさを求めて、求めた重複領域の大きさとなるように撮像条件を変えて撮像することを特徴とするものである。
【0017】
また、本発明の画像生成装置において、前記撮像位置制御手段で求める特徴量は、パターンの形状やパターン数であることを特徴とするものである。
【0018】
また、本発明の画像生成装置において、前記撮像位置制御手段は、撮像する画像のパターンを含む設計データを基に、特徴のあるパターンを検出し、画像間の重複領域になるように撮像条件を変えることを特徴とするものである。
【0019】
また、本発明の画像生成装置において、前記撮像位置制御手段は、撮像する画像のパターンを含む設計データを基に、注目したい部分ついては、画像間の重複領域ではなく、画像の中央付近になるように撮像する位置を変えることを特徴とするものである。
【0020】
更に、上記課題を達するために、電子顕微鏡を用いた電子デバイスパターンの画像生成装置において、電子デバイスパターンを撮像する撮像手段と、前記撮像手段で撮像する電子デバイスを撮像する位置に移動させる撮像位置制御手段と、前記電子デバイスパターンを撮像して得た複数枚の分割画像データを記憶する分割画像データを記憶する分割画像データ記憶手段と、該分割画像データ記憶手段に格納されている複数枚の分割画像データを用いて1枚の画像データに連結する画像連結手段とを備え、前記撮像位置制御手段は、検査する範囲及び前記撮像手段の撮像分解能の情報を基に画像連結処理が必要か否かを判定し、撮像位置の設定を行うことを特徴とするものである。
【0021】
また、本発明の画像生成装置において、前記画像連結処理を行った場合、ユーザーに画像連結処理を行ったことを通知することを特徴とするものである。
【発明の効果】
【0022】
本発明によれば、配線パターンのような単調なパターンであっても精度の良い連結画像が得られるようになる。
【図面の簡単な説明】
【0023】
【図1】本発明の装置構成を示すブロック図。
【図2】配線パターンの連結処理の問題点を示す図。
【図3】本発明の画像連結処理の概要を示す図。
【図4】本発明の基準位置合せ段階の処理フローを示す図。
【図5】設計データから画像に変換する概要を示す図。
【図6】重複領域のパターンのズレを示す図。
【図7】本発明の画像位置ズレ補正段階の処理フローを示す図。
【図8】本発明の画像連結手段の構成例を示す図。
【図9】本発明の装置構成を示すブロック図。
【図10】特徴パターンの概要を示す図。
【図11】本発明の撮像位置変更手段の処理フローを示す図。
【図12】本発明の装置構成のブロック図。
【図13】本発明の装置構成のブロック図。
【図14】本発明の装置構成のブロック図。
【図15】本発明の装置構成のブロック図。
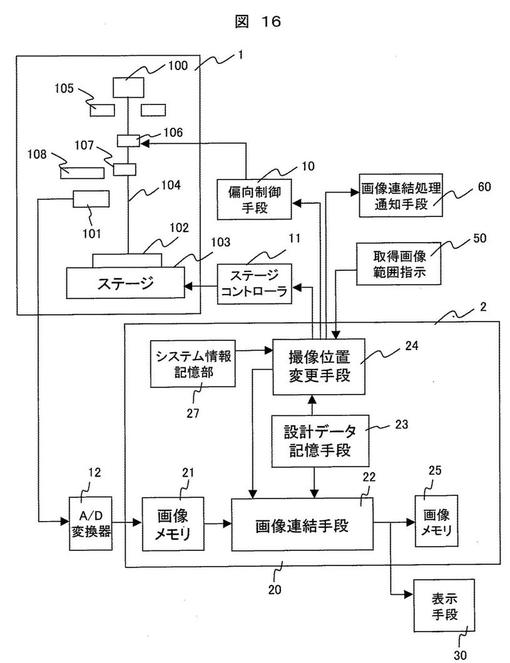
【図16】本発明の装置構成のブロック図。
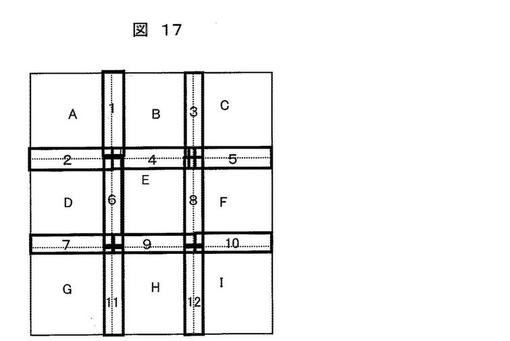
【図17】画像間の重複領域を示す図。
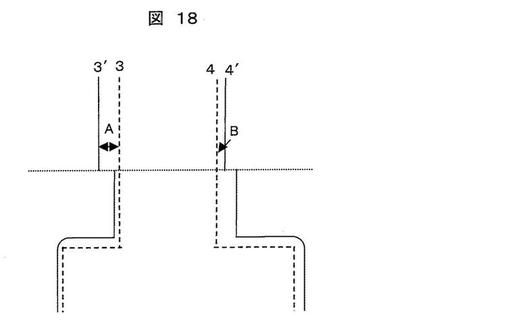
【図18】パターンの細り太りを示す図。
【発明を実施するための形態】
【0024】
本発明に関わるSEM装置(測長走査型電子顕微鏡:CD−SEM)などの走査型電子顕微鏡を用いた画像生成方法及び画像生成装置の実施の形態について説明する。
【0025】
以下、図1を用いて本発明の装置構成について説明する。
【0026】
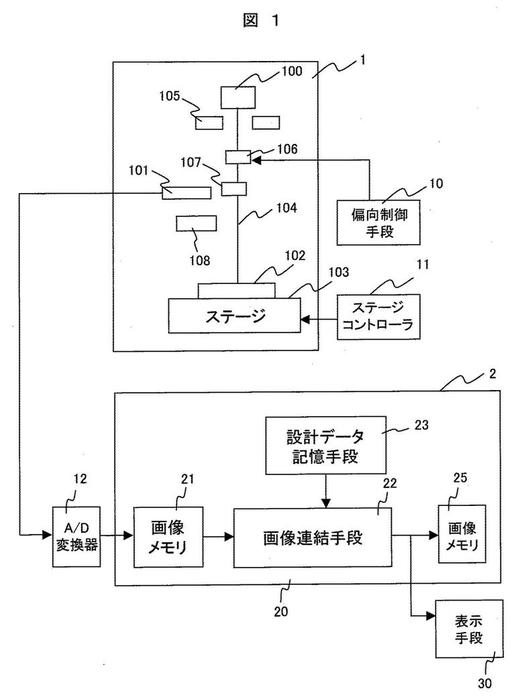
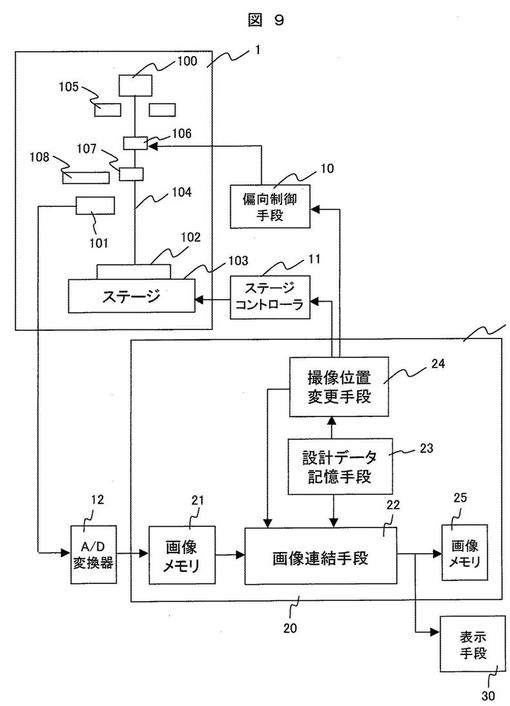
電子光学系1は電子線104を発生する電子銃100と、該電子銃100から発生した電子線104を収束させるコンデンサレンズ105と収束され電子線104を偏向させる偏向器106と、二次電子を検出するためのExB偏向器107と、収束された電子線を試料(マスク及びウェハ)102上に結像させる対物レンズ108とを備えて構成される。試料102は、XYステージ103上に載置される。その結果、偏向器106は及び対物レンズ108はXYステージ103上に載置された試料102上の任意の位置において電子線が焦点を結んで照射されるように、電子線の照射位置と絞りとを制御する。ところで、XYステージ103上は試料102を移動させ、該試料の任意位置の画像取得を可能にしている。
【0027】
一方、電子線が照射された試料102からは、2次電子と反射電子が放出され、2次電子は2次電子検出器101により検出される。2次電子検出器101で検出された2次電子の信号はA/D変換器12でデジタル信号に変換され画像処理部2で画像処理を施す。画像処理2ではデジタル信号に変換された信号を画像メモリ21に格納する。
【0028】
ここで、広範囲のパターン画像を取得する際、例えば9分割して撮像すると、9枚の分割パターン画像が画像メモリ21に格納される。そして、この9枚の分割パターン画像を1枚の画像に連結するために、画像メモリ21に格納している分割パターン画像データと設計データ記憶手段23からの設計データを用いて画像連結手段22で分割パターン画像を連結する。9分割して撮像する際、撮像位置を変えながら9回撮像し、撮像位置と撮像した分割パターン画像は対応させて管理しておく。そのため、予め9枚の分割パターン画像の大まかな配置は判る。そして、撮像位置の隣り合う分割パターン画像を連結して、最終的に一枚のパターン画像に連結する。一枚に連結したパターン画像は画像メモリ25に記憶し、表示手段30で表示する。
【0029】
図2を用いて配線パターンの連結処理の問題点を簡単に説明する。ここでは、9枚の分割パターン画像を1枚に連結する場合について述べる。
【0030】
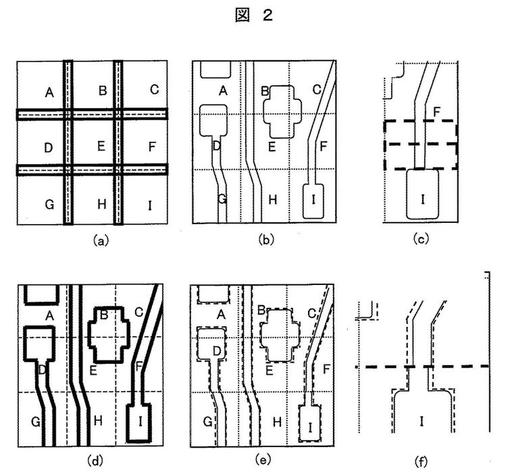
画像間の重複領域を用いて連結する方法は、図2(a)のように撮像範囲を9分割して点線で分けた領域の領域A〜I:9枚とした場合、隣り合う画像領域がある大きさ以上で重なる(重複する)ように撮像する。
【0031】
撮像する配線パターンは図2(b)のような直線的な単調なパターンが多い。そのため画像間の重複領域で見ると、さらに単調なパターンが多くなる。例えば、図2(b)のFとIの切れ目を拡大すると図2(c)のようになる。ここで太い点線の重複領域の画像間でマッチングすると考えると、横方向は特定できるが、縦方向にはどの位置でもマッチングの割合が高くなり、連結する位置が特定できなくなる。
【0032】
一方で設計データを用いてパターン画像間を連結することを考えると、画像間の重複領域は必要なく、設計データとパターン画像全体でマッチングするため、特徴を多く含む可能性がある。例えば、設計データをパターン画像に変換すると図2(d)のようなパターン画像が得られる。図2(b)の撮像した分割画像A〜Iそれぞれを、図2(d)のパターン画像にマッチングして重ねると図2(e)のように連結画像が生成できる。点線が設計データから得た画像パターンであり、実線がマッチング結果に基づいて貼り合せた分割画像である。この場合は画像間の重複領域は必要なく、画像内に特徴があればマッチング結果(貼り合せ位置)が得られる。しかし、細部のパターン画像はつながらない箇所もある。例えば、図2(f)は図2(e)の右下(F,Iの重複領域)を拡大したもので、撮像したパターン画像は設計データとのマッチングした位置で貼り合せたものであるが、多少ずれがある。撮像したパターンはもともと設計データのパターンを基に作成されたものであるが、変形されているため、マッチングしても完全に一致しない。そのため、先に述べた、撮像したパターン画像間の重複領域を基にマッチングする方法と設計データから作成したパターン画像と撮像したパターン画像のマッチングをする方法を組み合わせることを考えた。
【0033】
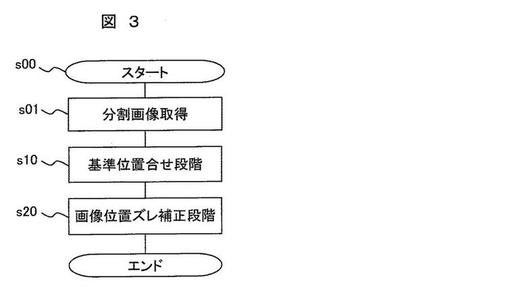
図3に画像連結処理の概要を示す。先ず、s01で分割画像を取得した後、s10の基準位置合せ段階で設計データから作成したパターン画像と撮像したパターン画像のマッチングを行い大まかに基準位置として位置合せを行う。その後にs20の画像位置ズレ補正段階で撮像したパターン画像間の重複領域を基にマッチングを行い、基準位置の微調整をする。
【0034】
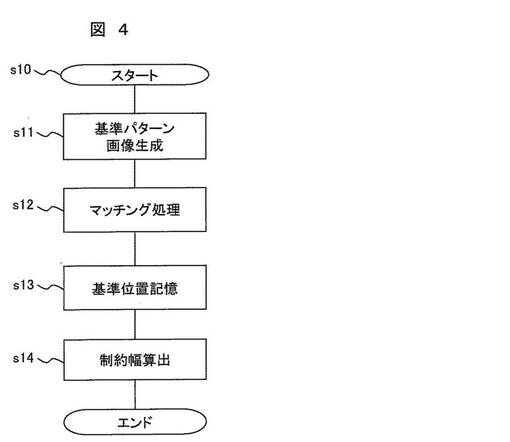
次に図4を用いて本発明の基準位置合せ段階の処理フローを説明する。
【0035】
s11の基準パターン画像生成で設計データを基に画像を生成する。
【0036】
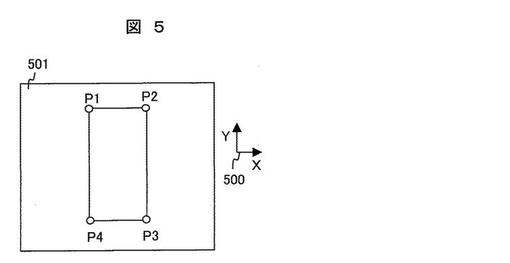
設計データを基に画像を生成する一例を示す。例えば、図5のようなパターン501は4つの頂点P1〜P4からなる。設計データには上記4つの頂点P1〜P4のx,y座標値に代表されるパターン形状の輪郭を表わす線分情報が記載されている。前記、x,y座標値は任意の基準座標系500により表わされ、ナノメートル等の単位をもつ。これら設計データにある情報を使ってパターン画像を生成する。また、線分は画像に合わせて白若しくは黒にすることが考えられる。変形を加えることも考えられる。ここでは設計データを基に生成した画像を基準パターン画像とする。
【0037】
s12のマッチング処理で設計データを基に作成した基準パターン画像と分割パターン画像とでマッチング処理を行う。9分割の画像であれば9枚についてそれぞれマッチングを行う。撮像位置に対応する分割パターン画像が判っていれば、9枚の画像の配置により、設計データと対応したマッチング位置を絞ることができる。
【0038】
s13の基準位置記憶では求めた分割パターン画像それぞれのマッチング位置を基準位置として記憶する。
【0039】
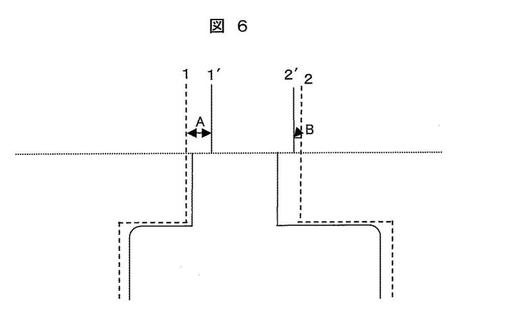
s14の制約幅算出では求めた分割パターン画像と基準パターン画像とでパターン間の差分を求めて記憶する。例えば画像の切れ目付近、または重複領域で貼り合せした際に図6に示すようなパターンになる場合、基準パターン画像のパターン(点線(1))と、分割パターン画像のパターン(実線(1)′)との差は−A、基準パターン画像のパターン(点線(2))と、分割パターン画像のパターン(実線(2)′)との差はBとなる。隣接する分割パターン画像のマッチングも基準パターン画像とマッチングしており、隣接する分割パターン画像のパターンも基準パターン画像のパターン幅の中にあると考えられる。そのため、差が−AとBの場合は、ずれている場合でも基準位置から、−A〜+Bの範囲に隣接する分割パターン画像のパターンも存在すると考えられる。それぞれの重複領域において同様に分割パターン画像のパターン間の差を求める。また、ここでは撮像した画像パターンが設計データのパターンより細っているが、実際には図18のようにパターンの方が太ったりする場合もある。太っている場合では、基準パターン画像のパターン(点線(3))と、分割パターン画像のパターン(実線(3)′)との差はA、基準パターン画像のパターン(点線(4))と、分割パターン画像のパターン(実線(4)′)との差は−Bとなる。この場合は基準位置から、A〜−Bの範囲に隣接する分割パターン画像のパターンも存在すると考えられる。このパターン間の差分を制約幅として記憶する。
【0040】
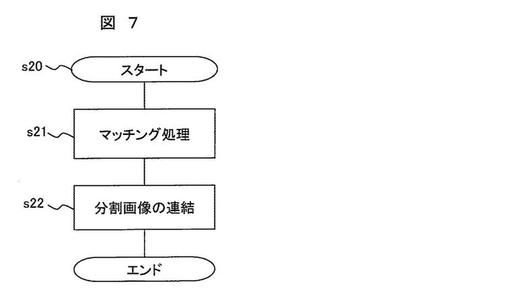
次に図7を用いて本発明の画像位置ズレ補正段階の処理フローを示す。
【0041】
s21のマッチング処理で撮像したパターン画像の隣接画像間の重複領域でマッチング処理を行う。重複領域の幅は例えば撮像誤差のMAX値としてもよい。
【0042】
また、検索する基準の位置はs12で求めた基準位置とする。また検索範囲はs13で求めた制約幅の値とする。例えば、(撮像したパターン画像のパターンが設計データのパターンより細っている場合は)図2(e)の点線の設計データのパターンで囲まれた中に撮像したパターン画像のパターンがある、若しくは、(撮像したパターン画像のパターンが設計データのパターンより太っている場合は)撮像したパターン画像の内側に設計データのパターンがあると考えてその間でマッチングを行うようにする。また、マッチングする際、例えば9枚の画像を連結する際、図17のように(1)〜(12)の12箇所に重複領域がある。このときの評価値は、この12箇所のマッチング率の合計値とすることが考えられる。また、制約を設けても12箇所に総当りでマッチングすると時間がかかる。その短縮する方法としてGAなどの多点探索で求めることが考えられる。また、はじめに、重複領域に特徴のある箇所でマッチングさせて、それらについては貼り合せ位置を確定させた後で、重複領域に特徴がない箇所だけについてのみ総当りを行い、マッチングさせることで高速化を図れる。
【0043】
S22の分割画像の連結ではS21で求めたマッチング位置に画像を連結して1枚の画像を作成する。
【0044】
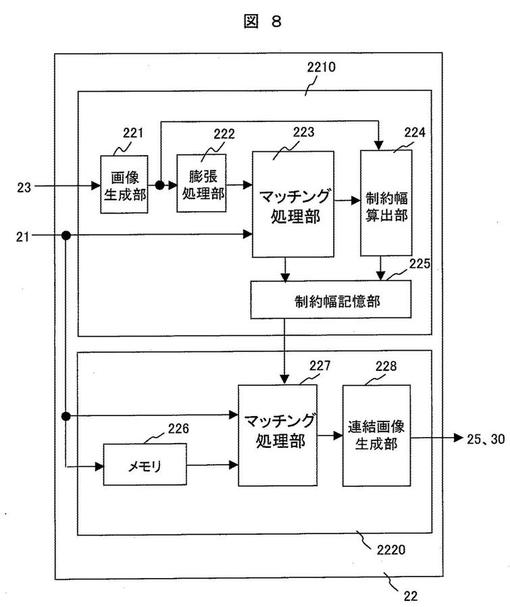
次に、図8を用いて本発明の画像連結手段の構成例を示す。画像連結手17は大きく基準位置合せ部2210と、画像位置ズレ補正部2220とで構成される。
【0045】
基準位置合せ部2210では設計データ記憶手段23から設計データを読み出し、画像生成部221でパターン画像に変換する。変換したパターン画像をここでは基準パターン画像とする。そしてこの基準パターン画像を膨張処理部222でパターンを膨張させる。マッチング処理223では膨張後の基準パターン画像と撮像した分割パターン画像をマッチングする。膨張処理するのはマッチングを良好に行うためである。制約幅算出部224ではマッチングした位置で分割パターン画像と膨張前の基準パターン画像を重ねて重複領域のパターン幅の差分を求める。ここは図6を使って説明したので省略する。求めた基準
位置及び制約幅は制約幅記憶部225に記憶する。画像位置ズレ補正部2220では画像メモリ21から分割パターン画像を読み出して一部メモリ226に格納してマッチング処理部227で分割画像間のマッチング処理を行う。このマッチングの際、制約幅記憶部225から、マッチングの初期値(開始点)とマッチングの検索範囲(制約幅)のパラメータを読み込む。例えば、図6のような制約幅が−A,Bであれば、−A〜+Bを検索範囲とする。そして、マッチング処理部227で求めた各分割パターン画像のマッチング位置を基に連結画像生成部で各分割パターン画像の連結画像を作成する。
【0046】
しかし、制約幅分の大きさの誤差が出る可能性がある。重複領域に特徴のあるパターンがあれば、マッチングは確定できる。そこで、重複領域に特徴のあるパターンが入るように撮像位置を変えることが考えられる。
【0047】
次に、図9を用いて本発明の撮像位置を変える装置構成を説明する。
【0048】
電子光学系1の説明は図1で説明したので省略する。設計データ記憶手段23から撮像位置変更手段24に撮像するパターンを含む設計データを取り込み、画像に変換して、変換した画像の重複領域を見て、特徴が在るか無いかを判別し特徴がより在る重複領域を探索する。特徴がより在る重複領域があれば、求めた重複領域に対応する撮像位置になるようにステージコントローラ11及びまたは偏向制御手段10に指示する。また、撮像した分割画像を連結する際、画像連結手段22に分割画像毎に重複領域の大きさを通知する。
【0049】
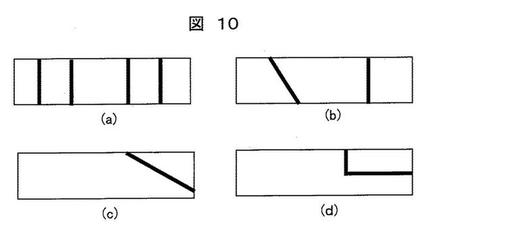
次に、図10を用いて特徴が在るか無いかを判別する際の特徴のあるパターンについて説明する。例えば図10(a)は4つの線分のパターンはあるが、全て同じ縦方向にあるため、マッチング処理をする際、横方向は一致する点は特定できるが、縦方向は特定できない。図10(b)は2つの線分のパターンであるが、方向が異なるため、縦方向,横方向は特定できる。図10(c)は斜め線で斜め方向で特定できるが、縦,横とも特定できない。図10(d)は1つの線でつながっているが、2つの方向の線分があるため、縦,横とも特定できる。そこで、特徴の有り無しの基準は、例えば、2つ以上の方向の異なる線があるがどうかで判定することが考えられる。そのため、設計データの情報が閉図形の頂点座標であれば、頂点から頂点を結ぶ線の方向は容易に求まる。パターン画像を生成する時点で予め撮像する位置が決まっていればパターンが重複領域に入るかどうか判るので、重複領域に入る頂点と頂点を結ぶ線が何本になるかも判る。つまり、重複領域に存在する線の何本数もそれぞれの方向や角度も容易に判る。そこで、重複領域に方向の異なる2つ以上の線分が有るか無いかで特徴パターンの有るか無いかを判定する。また、ここでは線分としたが、パターンの形状でもよい。例えば、縦,横,斜めなどに方向別にエッジ量を求めて、どの方向のパターンかを特定することができる。ここで、エッジ量とはフィルタ処理の出力とする。例えば、ラプラシアンフィルタ処理や縦,横,斜めのsobleフィルタ処理の出力を基に得た値とすることが考えられる。
【0050】
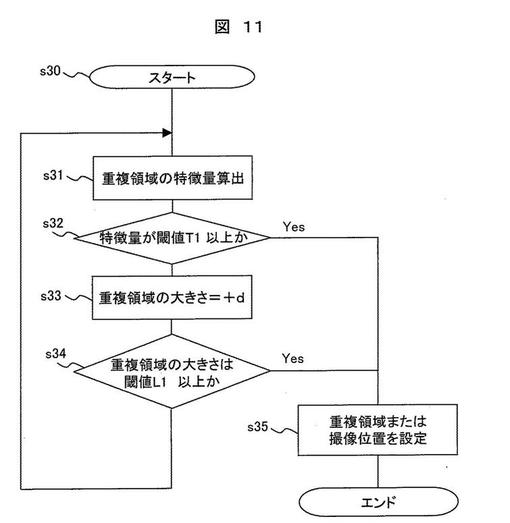
図11を用いて本発明の撮像位置変更手段の処理フローを説明する。設計データを用いてS31で重複領域に含まれるパターンの特徴量を算出する。ここでの特徴量は重複領域に存在する方向の異なる線分の数とする。S32で特徴量が閾値T1以上か否かで判定し、閾値T1以上であれば、s35で現重複領域の幅を記憶し、その重複領域に対応した撮像位置を求める。ここで閾値T1は方向の異なる線分の数とし、値は2とする。また、閾値T1以上でなければ、S33で重複領域の大きさを+d増やす。そしてS34で現重複領域の大きさが上限値のL1以上でないことを確認して、もし、上限値L1以上であれば、重複領域をL1としてS35で現重複領域の幅を記憶し、その重複領域に対応した撮像位置を求める。
【0051】
また、上限値でなければ、S31で重複領域に含まれるパターンの特徴量を検出し、以上の処理を繰り返す。
【0052】
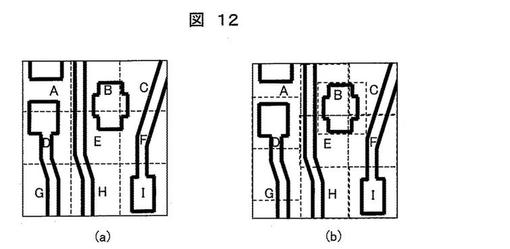
また、シミュレーションで見たい箇所は最も問題の起こりそうな箇所と考えられ、必ずしも全てが必要でない場合もある。例えば、図12(a)に示す配線パターンがある場合、注目する箇所については、画像間の重複領域(切れ目)にならいように撮像する位置で撮像することが考えられる。例えば、矩形の角のように2つの線分の角度が90°になるような箇所を注目したい場合は、図12(b)のように分割した一枚の画像内に矩形の角が納まるように撮像することが考えられる。そして、さほど注目しない部分については、画像の何処にきてもいいので、例えば、注目したい箇所が画像の中央になるように他の部分の撮像位置をそれぞれずらしたり、もしくは、図12(a)のように満遍なく分割画像を取得した後に、注目しない部分を別途取得することも考えられる。このように注目する箇所が切れ目(重複領域)にしないようにすればマッチング精度の影響を防止できる。
【0053】
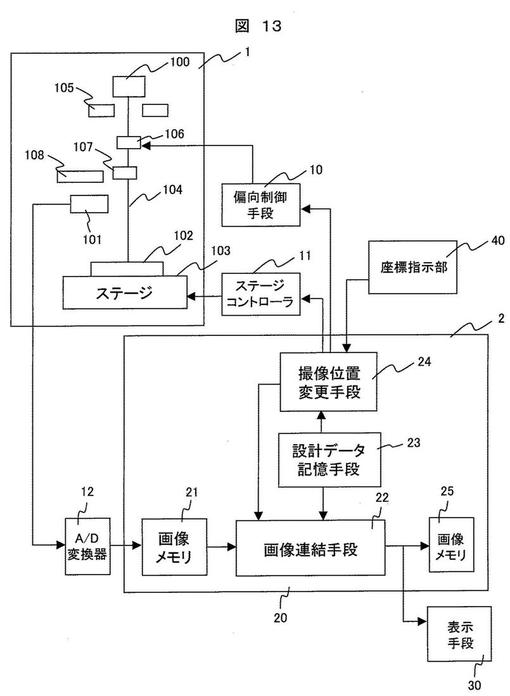
この場合は図13のようにユーザーが注目する領域の座標を指定することが考えられる。ここではユーザーが座標指示部40で座標を指示すると、指示された座標の領域は撮像する分割画像の中央になるように撮像位置変更手段24で撮像位置を求めて、偏向制御手段10,ステージコントローラ11で撮像位置を変更24する。この場合、ユーザーは設計データに基づいた画像を表示画面等で見ながら座標を指示することも考えられる。撮像位置変更手段24で求める撮像位置は撮像した画像の中央に座標指示部40で指示された領域がくる撮像位置である。
【0054】
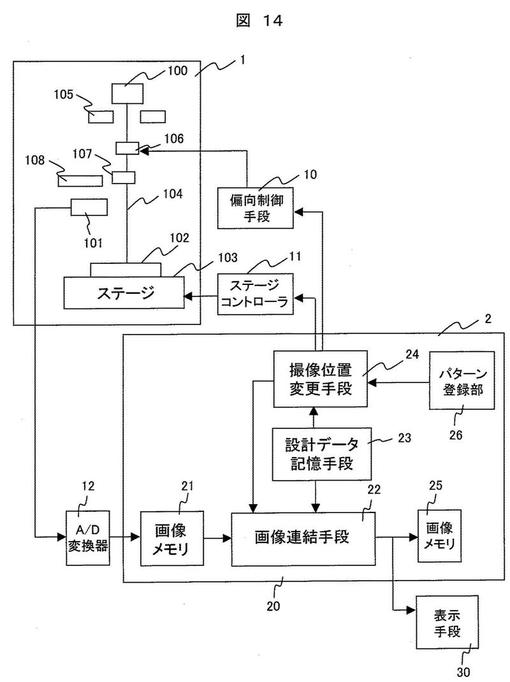
ここではユーザーが指示することを記載したが、注目したいパターンはある程度特定したパターンになる場合が多い。そこで、図14に示すように予め注目するパターンをパターン登録部26に登録しておき、そのパターンが取得したい画像の範囲にあるかどうかを判定して、もし存在すればそのパターンについては画像の中央になるように撮像位置を変更することが考えられる。
【0055】
パターンがあるかどうかの判定は一般的なマッチング処理で実現できる。注目したいパターンと取得するパターンを含む設計データから画像に変換したパターン画像とでマッチング処理してマッチングする値が高い場合はその位置の注目したいパターンがあると判定し、その位置ある注目したいパターンが撮像する際に中央になる撮像位置に変更若しくは設定する。
【0056】
ここで、図13及び図14ではユーザーによる指示、または登録されたパターンとのマッチングで注目したいパターンを特定し、注目したいパターンが中央になる撮像位置に変更するが、特にそれに限らず、例えば、特徴のあるパターンを画像の切れ目(重複領域)にするようにすることも考えられる。つまり、ユーザーによる指示、または登録されたパターンとのマッチングで特徴のあるパターンを特定し、特徴のあるパターンが画像の切れ目(重複領域)になる撮像位置に変更することも考えられる。この特徴のあるパターンとは図10を用いて説明したパターンと考えてもよい。
【0057】
また、画像連結処理で分割画像は何枚必要かどうかユーザーが前もって設定したりするのは手間がかかる。しかし、画像連結処理が必要かどうか、または、分割画像は何枚必要かは、撮像する倍率での1枚の画像範囲と、ユーザーが取得したい画像範囲でおのずと判る。
【0058】
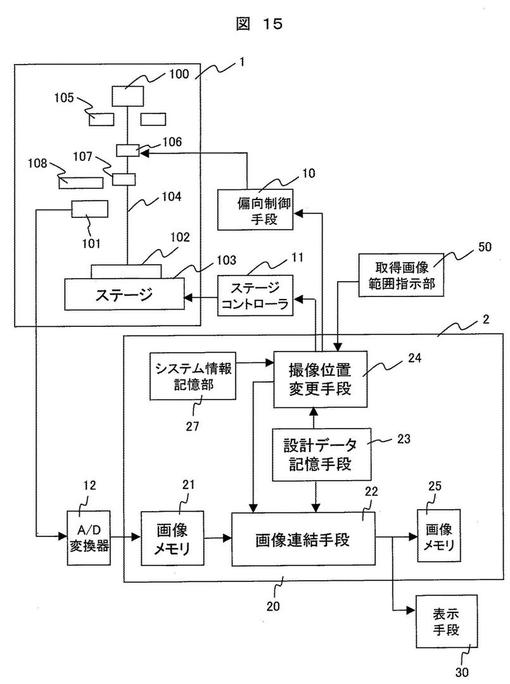
ユーザーが取得したい画像範囲が撮像する倍率での1枚の画像範囲より大きければ画像連結処理が必要とわかる。また分割画像数は例えば、横方向のみ考えるとユーザーが取得したい画像幅/撮像する倍率での1枚の画像幅−重複領域幅で必要な分割画像枚数がわかる。例えば、図15のように取得画像範囲指示部50を設けて、取得画像範囲をユーザーに設定してもらえばよい。撮像倍率での1枚の画像範囲もユーザーに設定してもらうか、もしくはシステム情報記憶部27にその情報を記憶させておいてもよい。撮像倍率はその撮像装置の限界性能であってもよい。そうすれば、システム情報記憶部は固定値となる。
【0059】
また、自動的に画像を連結させた場合、うまくつながらない場合は、欠陥により、実際につながってないのか、画像連結処理のマッチングの精度のためにつながってないのか判別できないと困る。そのため、図16のように画像連結処理通知手段60を設けて、画像連結処理を行った場合には画像連結処理を行ったことを通知する。例えば、LED照明の点灯でもよいし、ファイルに書き出してもよい。また、表示装置30に表示する連結画像を表示する際、画像連結処理を行った連結画像であることがわかるようにすることも考えられる。
【0060】
また、連結した画像の最初の若しくは最後の1画素ないし複数画素を異なる色や明るさで表示させる事や、線やマーカ等で表示させる事で、連結した位置の精度を目視でも確認することができる。
【0061】
また、撮像する範囲によって設計データを基にして求めた一連の分割画像の撮像位置を予め求めて記憶させておくことが考えられる。そうすれば、撮像する際に記憶させた撮像位置を読み出して撮像すればよい。
【0062】
また、以上の実施例では2次電子検出器で得た画像を用いた例をしめしたが、電子線を試料102に照射した際の2次反射電子を用いて生成した画像を用いることも考えられる。
【0063】
また、以上の実施例において、本発明の画像処理部2についてはソフト処理で行ってもよい。またその際、パソコンでソフト処理を行ってもいいし、LSIに組み込んでハード処理で行うことも可能である。
【0064】
以上説明したように、本発明においては、配線パターンは単調な画像が多いため、画像データだけでは貼り合せ位置を特定できない場合がある。一方、撮像した配線パターンを検査する際には電子デバイスパターンのレイアウト情報が記述された設計データを用いて検査している。この設計データを利用して分割画像間の貼り合せ位置を絞り、特定することができる。設計データであれば注目箇所の周囲のパターン情報を撮像することなく得て参照することができる。
【0065】
先ず、電子デバイスパターンを隣り合う画像領域が重なる重複領域を設けて分割して撮像して得た複数枚の分割画像データと撮像したそれぞれの分割画像の位置に対応する設計データとでマッチング処理を行う段階を設けて、大まかに貼り合せ位置を求める。マッチング処理したそれぞれの画像を設計データの基準に(設計データは全てつながるように)並べると、画像はつながらない箇所もある。撮像した画像は設計データを基に作成したものであるが、完全に一致するものはできない。そのため、マッチング処理しても多少ずれる。そのため、今度は分割画像間の重複領域の画像データを用いてマッチング処理を段階を設ける。この際、各画像と設計データとのズレ量をそれぞれ求めておき、設計データと画像でマッチングして求めた貼り合せ位置を原点として、求めたズレ量の範囲でマッチング処理を行うことで貼り合せ位置を特定する。
【0066】
また、目視で線を全て接続しても、設計データと画像のズレがある限り、連結した画像が実際の画像と一致しない場合もありえる。そのため、なるべく画像間の重複領域に特徴のあるパターンが存在するようにしたい。特徴とは縦,横,斜め方向別のエッジ量若しくはベクトル数及び又は方向の数として表し、これらの値が特定の値以上になるかどうかを判定する特徴パターン有無判定の手段を設ける。判定の結果が、特徴パターン有りと判定された場合は現状の撮像位置で撮像し、特徴パターン無しと判定された場合は特徴パターンが有ると判定する重複領域の長さを求めて、その重複領域の長さになる撮像位置に変更して撮像する。設計データを参考にすれば予め撮像位置にどのようなパターンがあるか判るので、設計データを基に、ステージを撮像する位置に移動させる撮像位置制御手段で撮像位置を変えることで、特徴のある重複領域の画像データを用いることができマッチング処理の精度を高める。また、シミュレーションのために撮像する一連の画像撮像位置について、予め特徴パターン判定手段を基に求めた撮像位置等を記憶しておく。
【0067】
また、シミュレーションで見たい箇所は最も問題の起こりそうな箇所と考えられ、必ずしも全てが必要でない場合もある。例えば、注目する箇所については、画像間の重複領域(切れ目)にならいように、画面の中央になるように、撮像する画像の位置に対応する設計データを基に、ステージを撮像する位置に移動させる撮像位置制御手段で、撮像位置を変えることで、注目する箇所についてはマッチング精度の影響を防止できる。
【0068】
また、撮像位置制御手段で、検査する範囲及び前記撮像手段の撮像分解能の情報を基に画像連結処理が必要か否かを判定し、撮像位置,読取回数等の設定を行うことができ、ユーザーは検査する範囲,撮像分解能のみ設定すれば、意識せずに自動的に適切な撮像位置,読取回数等を設定して撮像し、画像連結処理を施して、連結画像を得ることができ、使い勝手の向上も図ることができる。
【符号の説明】
【0069】
1 電子光学系
2 画像処理部
10 偏向制御手段
11 ステージコントローラ
12 A/D変換器
21,25 画像メモリ
22 画像連結手段
23 設計データ記憶手段
24 撮像位置変更手段
26 パターン登録部
27 システム情報記憶部
30 表示手段
40 座標指示部
50 取得画像範囲指示部
60画像連結処理通知手段
100 電子銃
101 2次電子検出器
102 試料
103 XYステージ
104 電子線
105 コンデンサレンズ
106 偏向器
107 ExB偏向器
108 対物レンズ
221 画素生成部
222 膨張処理部
223,227 マッチング処理部
224 制約幅算出部
225 制約幅記憶部
226 メモリ
228 連結画像生成部
500 基準座標系
501 パターン
2201 基準位置合せ部
2202 画像位置ズレ補正部
【技術分野】
【0001】
本発明は、試料上の任意の位置を測長走査型電子顕微鏡(Critical-Dimension Scanning Electron Microscope:CD−SEM)等により電子デバイスパターンを撮像して検査を行う画像生成方法及びその装置に関するものである。
【背景技術】
【0002】
半導体ウェハに形成された高精度の配線パターンの出来映えを測定して検査するのに、従来から測長走査型電子顕微鏡(Critical-Dimension Scanning Electron Microscope:CD−SEM)等が広く用いられている。現在、半導体デバイスはプロセスの微細化が進み、65nmの量産が行われている。検査すべき欠陥等も微細化が進むに伴い小さくなり、撮像する際の倍率も高倍率にならざるを得ない。一方、配線パターンのレイアウトシミュレーションを行う際、広範囲で行いたいニーズがある。また、今後、詳細なシミュレーションを行うためには、画像は高倍率で取得したいと思われる。しかし、高倍率で撮像すると画面に入る部分は小さくなるため、広範囲で見ることはできない。
【0003】
また、〔特許文献1〕では低倍率で全体画像を取得した後、高倍率に変えて分割画像を取得する方法が提案されている。この方法では単調なパターンでも全体画像を参考にすることで、貼り合せ位置が特定できる。しかし、倍率を変えて全体画像を読む必要がある。また、マスクを撮像する際は問題ないが、ウェハを撮像すると帯電の問題があり、一度読むと画像が乱れることがあるため、なるべくなら、全体画像を読むことがない方法が好ましい。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2001−128106号公報
【特許文献2】特開2003−098112号公報
【特許文献3】特開2004−333446号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
この問題を解決する方法として、〔特許文献2〕のようにステージの位置情報をもとに画像を複数枚に分割して撮像し貼り合せることで高倍率の詳細な画像を広範囲に得る方法が提案されている。しかし、ステージの移動量はかなり正確ではあるものの、nm単位でみるとズレており、高倍率で撮像した画像を貼り合せるとずれてしまい、貼り合せ位置で線が切れてしまうことになる。詳細なシミュレーションを行うには1画素のズレでも好ましくないため、この方法を用いることはできない。また、〔特許文献3〕は複数の領域について隣接する領域の画像と重なるように撮像し、その重複領域でマッチング処理を行い、整合のとれた高倍率の詳細な画像を広範囲に得ることができる。しかし、配線パターンは単調な画像が多いため、重複領域でマッチング処理を行うとマッチング率の高い、貼り合せの候補点が複数出てくることがある。その場合、どの位置が実際に合わせる位置か判らず、2枚以上で連結すると全体画像では必ず何処かが合わなくなるという問題があった。
【0006】
本発明の課題は、半導体ウェハに形成された高精度の配線パターンの測定して検査する際に、配線パターンのような単調なパターンを測定する際にも、精度の良い連結画像が得られることを目的とするものである。
【課題を解決するための手段】
【0007】
上記課題を達するために、本発明は電子顕微鏡を用いた電子デバイスパターンの画像生成方法において、電子デバイスパターンのレイアウト情報が記述された設計データを記憶すること、撮像位置を変えて前記電子デバイスパターンを撮像して得た複数枚の分割画像データを記憶すること、前記複数枚の分割画像データと前記設計データファイルの設計データとを用いて前記複数枚の分割画像データを1枚の画像に連結することを特徴とするものである。
【0008】
また、本発明の画像生成方法は、前記画像連結を行うに際して、前記電子デバイスパターンを隣り合う画像領域が重なる重複領域を設けて分割して撮像して得た前記複数枚の分割画像データと、撮像した分割画像のパターンを含む設計データとのマッチングを行う第一のマッチング処理と、前記分割画像間の重複領域の画像データを用いてマッチングを行う第二のマッチング処理を行うことを特徴とするものである。
【0009】
また、本発明の画像生成方法は、前記画像連結を行うに際して、前記第一のマッチング処理で、前記第二のマッチング処理で用いるパラメータを求めることを特徴とするものである。
【0010】
また、本発明の画像生成方法は、前記画像連結を行うに際して、第一のマッチング処理で求める第二のマッチング処理のパラメータは基準位置及び検索範囲に関する情報であることを特徴とするものである。
【0011】
更に、上記課題を達するために、本発明は電子顕微鏡を用いた電子デバイスパターンの画像生成装置であって、電子デバイスパターンのレイアウト情報が記述された設計データ記憶手段と、撮像位置を変えて前記電子デバイスパターンを撮像して得た複数枚の分割画像データ記憶手段と、前記複数枚の分割画像データと前記設計データファイルの設計データとを用いて前記複数枚の分割画像データを1枚の画像に連結する画像連結手段とを備えることを特徴とするものである。
【0012】
また、本発明の画像生成装置において、前記画像連結手段は、前記電子デバイスパターンを隣り合う画像領域が重なる重複領域を設けて分割して撮像して得た前記複数枚の分割画像データと、撮像した分割画像のパターンを含む設計データとのマッチングを行う第一のマッチング手段と、前記分割画像間の重複領域の画像データを用いてマッチングを行う第二のマッチング手段とを備えることを特徴とするものである。
【0013】
また、本発明の画像生成装置において、前記画像連結手段は、前記第一のマッチング手段で、前記第二のマッチング手段で用いるパラメータを求めることを特徴とするものである。
【0014】
また、本発明の画像生成装置において、前記画像連結手段の第一のマッチング手段で求める第二のマッチング手段のパラメータは基準位置及び検索範囲に関する情報であることを特徴とするものである。
【0015】
更に、上記課題を達するために、電子顕微鏡を用いた電子デバイスパターンの画像生成装置において、電子デバイスパターンを撮像する撮像手段と、前記撮像手段で撮像する電子デバイスを撮像する位置に移動させる撮像位置制御手段と、電子デバイスパターンのレイアウト情報が記述された設計データ記憶手段と、撮像位置を変えて前記電子デバイスパターンを撮像して得た複数枚の分割画像データを記憶する分割画像データ記憶手段と、該分割画像データ記憶手段に格納されている前記複数枚の分割画像データと前記設計データ記憶手段の設計データとを用いて複数枚の分割画像データを1枚の画像に連結する画像連結手段とを備え、前記撮像位置制御手段は前記設計データを基に撮像する条件を変更することを特徴とするものである。
【0016】
また、本発明の画像生成装置において、前記撮像位置制御手段は、撮像する条件を変える際、予め撮像する画像のパターンを含む設計データを用いて、重複領域となる領域の特徴量を求めて判定し、特徴量が特定の閾値より小さい場合は特徴量がより大きくなる重複領域の大きさを求めて、求めた重複領域の大きさとなるように撮像条件を変えて撮像することを特徴とするものである。
【0017】
また、本発明の画像生成装置において、前記撮像位置制御手段で求める特徴量は、パターンの形状やパターン数であることを特徴とするものである。
【0018】
また、本発明の画像生成装置において、前記撮像位置制御手段は、撮像する画像のパターンを含む設計データを基に、特徴のあるパターンを検出し、画像間の重複領域になるように撮像条件を変えることを特徴とするものである。
【0019】
また、本発明の画像生成装置において、前記撮像位置制御手段は、撮像する画像のパターンを含む設計データを基に、注目したい部分ついては、画像間の重複領域ではなく、画像の中央付近になるように撮像する位置を変えることを特徴とするものである。
【0020】
更に、上記課題を達するために、電子顕微鏡を用いた電子デバイスパターンの画像生成装置において、電子デバイスパターンを撮像する撮像手段と、前記撮像手段で撮像する電子デバイスを撮像する位置に移動させる撮像位置制御手段と、前記電子デバイスパターンを撮像して得た複数枚の分割画像データを記憶する分割画像データを記憶する分割画像データ記憶手段と、該分割画像データ記憶手段に格納されている複数枚の分割画像データを用いて1枚の画像データに連結する画像連結手段とを備え、前記撮像位置制御手段は、検査する範囲及び前記撮像手段の撮像分解能の情報を基に画像連結処理が必要か否かを判定し、撮像位置の設定を行うことを特徴とするものである。
【0021】
また、本発明の画像生成装置において、前記画像連結処理を行った場合、ユーザーに画像連結処理を行ったことを通知することを特徴とするものである。
【発明の効果】
【0022】
本発明によれば、配線パターンのような単調なパターンであっても精度の良い連結画像が得られるようになる。
【図面の簡単な説明】
【0023】
【図1】本発明の装置構成を示すブロック図。
【図2】配線パターンの連結処理の問題点を示す図。
【図3】本発明の画像連結処理の概要を示す図。
【図4】本発明の基準位置合せ段階の処理フローを示す図。
【図5】設計データから画像に変換する概要を示す図。
【図6】重複領域のパターンのズレを示す図。
【図7】本発明の画像位置ズレ補正段階の処理フローを示す図。
【図8】本発明の画像連結手段の構成例を示す図。
【図9】本発明の装置構成を示すブロック図。
【図10】特徴パターンの概要を示す図。
【図11】本発明の撮像位置変更手段の処理フローを示す図。
【図12】本発明の装置構成のブロック図。
【図13】本発明の装置構成のブロック図。
【図14】本発明の装置構成のブロック図。
【図15】本発明の装置構成のブロック図。
【図16】本発明の装置構成のブロック図。
【図17】画像間の重複領域を示す図。
【図18】パターンの細り太りを示す図。
【発明を実施するための形態】
【0024】
本発明に関わるSEM装置(測長走査型電子顕微鏡:CD−SEM)などの走査型電子顕微鏡を用いた画像生成方法及び画像生成装置の実施の形態について説明する。
【0025】
以下、図1を用いて本発明の装置構成について説明する。
【0026】
電子光学系1は電子線104を発生する電子銃100と、該電子銃100から発生した電子線104を収束させるコンデンサレンズ105と収束され電子線104を偏向させる偏向器106と、二次電子を検出するためのExB偏向器107と、収束された電子線を試料(マスク及びウェハ)102上に結像させる対物レンズ108とを備えて構成される。試料102は、XYステージ103上に載置される。その結果、偏向器106は及び対物レンズ108はXYステージ103上に載置された試料102上の任意の位置において電子線が焦点を結んで照射されるように、電子線の照射位置と絞りとを制御する。ところで、XYステージ103上は試料102を移動させ、該試料の任意位置の画像取得を可能にしている。
【0027】
一方、電子線が照射された試料102からは、2次電子と反射電子が放出され、2次電子は2次電子検出器101により検出される。2次電子検出器101で検出された2次電子の信号はA/D変換器12でデジタル信号に変換され画像処理部2で画像処理を施す。画像処理2ではデジタル信号に変換された信号を画像メモリ21に格納する。
【0028】
ここで、広範囲のパターン画像を取得する際、例えば9分割して撮像すると、9枚の分割パターン画像が画像メモリ21に格納される。そして、この9枚の分割パターン画像を1枚の画像に連結するために、画像メモリ21に格納している分割パターン画像データと設計データ記憶手段23からの設計データを用いて画像連結手段22で分割パターン画像を連結する。9分割して撮像する際、撮像位置を変えながら9回撮像し、撮像位置と撮像した分割パターン画像は対応させて管理しておく。そのため、予め9枚の分割パターン画像の大まかな配置は判る。そして、撮像位置の隣り合う分割パターン画像を連結して、最終的に一枚のパターン画像に連結する。一枚に連結したパターン画像は画像メモリ25に記憶し、表示手段30で表示する。
【0029】
図2を用いて配線パターンの連結処理の問題点を簡単に説明する。ここでは、9枚の分割パターン画像を1枚に連結する場合について述べる。
【0030】
画像間の重複領域を用いて連結する方法は、図2(a)のように撮像範囲を9分割して点線で分けた領域の領域A〜I:9枚とした場合、隣り合う画像領域がある大きさ以上で重なる(重複する)ように撮像する。
【0031】
撮像する配線パターンは図2(b)のような直線的な単調なパターンが多い。そのため画像間の重複領域で見ると、さらに単調なパターンが多くなる。例えば、図2(b)のFとIの切れ目を拡大すると図2(c)のようになる。ここで太い点線の重複領域の画像間でマッチングすると考えると、横方向は特定できるが、縦方向にはどの位置でもマッチングの割合が高くなり、連結する位置が特定できなくなる。
【0032】
一方で設計データを用いてパターン画像間を連結することを考えると、画像間の重複領域は必要なく、設計データとパターン画像全体でマッチングするため、特徴を多く含む可能性がある。例えば、設計データをパターン画像に変換すると図2(d)のようなパターン画像が得られる。図2(b)の撮像した分割画像A〜Iそれぞれを、図2(d)のパターン画像にマッチングして重ねると図2(e)のように連結画像が生成できる。点線が設計データから得た画像パターンであり、実線がマッチング結果に基づいて貼り合せた分割画像である。この場合は画像間の重複領域は必要なく、画像内に特徴があればマッチング結果(貼り合せ位置)が得られる。しかし、細部のパターン画像はつながらない箇所もある。例えば、図2(f)は図2(e)の右下(F,Iの重複領域)を拡大したもので、撮像したパターン画像は設計データとのマッチングした位置で貼り合せたものであるが、多少ずれがある。撮像したパターンはもともと設計データのパターンを基に作成されたものであるが、変形されているため、マッチングしても完全に一致しない。そのため、先に述べた、撮像したパターン画像間の重複領域を基にマッチングする方法と設計データから作成したパターン画像と撮像したパターン画像のマッチングをする方法を組み合わせることを考えた。
【0033】
図3に画像連結処理の概要を示す。先ず、s01で分割画像を取得した後、s10の基準位置合せ段階で設計データから作成したパターン画像と撮像したパターン画像のマッチングを行い大まかに基準位置として位置合せを行う。その後にs20の画像位置ズレ補正段階で撮像したパターン画像間の重複領域を基にマッチングを行い、基準位置の微調整をする。
【0034】
次に図4を用いて本発明の基準位置合せ段階の処理フローを説明する。
【0035】
s11の基準パターン画像生成で設計データを基に画像を生成する。
【0036】
設計データを基に画像を生成する一例を示す。例えば、図5のようなパターン501は4つの頂点P1〜P4からなる。設計データには上記4つの頂点P1〜P4のx,y座標値に代表されるパターン形状の輪郭を表わす線分情報が記載されている。前記、x,y座標値は任意の基準座標系500により表わされ、ナノメートル等の単位をもつ。これら設計データにある情報を使ってパターン画像を生成する。また、線分は画像に合わせて白若しくは黒にすることが考えられる。変形を加えることも考えられる。ここでは設計データを基に生成した画像を基準パターン画像とする。
【0037】
s12のマッチング処理で設計データを基に作成した基準パターン画像と分割パターン画像とでマッチング処理を行う。9分割の画像であれば9枚についてそれぞれマッチングを行う。撮像位置に対応する分割パターン画像が判っていれば、9枚の画像の配置により、設計データと対応したマッチング位置を絞ることができる。
【0038】
s13の基準位置記憶では求めた分割パターン画像それぞれのマッチング位置を基準位置として記憶する。
【0039】
s14の制約幅算出では求めた分割パターン画像と基準パターン画像とでパターン間の差分を求めて記憶する。例えば画像の切れ目付近、または重複領域で貼り合せした際に図6に示すようなパターンになる場合、基準パターン画像のパターン(点線(1))と、分割パターン画像のパターン(実線(1)′)との差は−A、基準パターン画像のパターン(点線(2))と、分割パターン画像のパターン(実線(2)′)との差はBとなる。隣接する分割パターン画像のマッチングも基準パターン画像とマッチングしており、隣接する分割パターン画像のパターンも基準パターン画像のパターン幅の中にあると考えられる。そのため、差が−AとBの場合は、ずれている場合でも基準位置から、−A〜+Bの範囲に隣接する分割パターン画像のパターンも存在すると考えられる。それぞれの重複領域において同様に分割パターン画像のパターン間の差を求める。また、ここでは撮像した画像パターンが設計データのパターンより細っているが、実際には図18のようにパターンの方が太ったりする場合もある。太っている場合では、基準パターン画像のパターン(点線(3))と、分割パターン画像のパターン(実線(3)′)との差はA、基準パターン画像のパターン(点線(4))と、分割パターン画像のパターン(実線(4)′)との差は−Bとなる。この場合は基準位置から、A〜−Bの範囲に隣接する分割パターン画像のパターンも存在すると考えられる。このパターン間の差分を制約幅として記憶する。
【0040】
次に図7を用いて本発明の画像位置ズレ補正段階の処理フローを示す。
【0041】
s21のマッチング処理で撮像したパターン画像の隣接画像間の重複領域でマッチング処理を行う。重複領域の幅は例えば撮像誤差のMAX値としてもよい。
【0042】
また、検索する基準の位置はs12で求めた基準位置とする。また検索範囲はs13で求めた制約幅の値とする。例えば、(撮像したパターン画像のパターンが設計データのパターンより細っている場合は)図2(e)の点線の設計データのパターンで囲まれた中に撮像したパターン画像のパターンがある、若しくは、(撮像したパターン画像のパターンが設計データのパターンより太っている場合は)撮像したパターン画像の内側に設計データのパターンがあると考えてその間でマッチングを行うようにする。また、マッチングする際、例えば9枚の画像を連結する際、図17のように(1)〜(12)の12箇所に重複領域がある。このときの評価値は、この12箇所のマッチング率の合計値とすることが考えられる。また、制約を設けても12箇所に総当りでマッチングすると時間がかかる。その短縮する方法としてGAなどの多点探索で求めることが考えられる。また、はじめに、重複領域に特徴のある箇所でマッチングさせて、それらについては貼り合せ位置を確定させた後で、重複領域に特徴がない箇所だけについてのみ総当りを行い、マッチングさせることで高速化を図れる。
【0043】
S22の分割画像の連結ではS21で求めたマッチング位置に画像を連結して1枚の画像を作成する。
【0044】
次に、図8を用いて本発明の画像連結手段の構成例を示す。画像連結手17は大きく基準位置合せ部2210と、画像位置ズレ補正部2220とで構成される。
【0045】
基準位置合せ部2210では設計データ記憶手段23から設計データを読み出し、画像生成部221でパターン画像に変換する。変換したパターン画像をここでは基準パターン画像とする。そしてこの基準パターン画像を膨張処理部222でパターンを膨張させる。マッチング処理223では膨張後の基準パターン画像と撮像した分割パターン画像をマッチングする。膨張処理するのはマッチングを良好に行うためである。制約幅算出部224ではマッチングした位置で分割パターン画像と膨張前の基準パターン画像を重ねて重複領域のパターン幅の差分を求める。ここは図6を使って説明したので省略する。求めた基準
位置及び制約幅は制約幅記憶部225に記憶する。画像位置ズレ補正部2220では画像メモリ21から分割パターン画像を読み出して一部メモリ226に格納してマッチング処理部227で分割画像間のマッチング処理を行う。このマッチングの際、制約幅記憶部225から、マッチングの初期値(開始点)とマッチングの検索範囲(制約幅)のパラメータを読み込む。例えば、図6のような制約幅が−A,Bであれば、−A〜+Bを検索範囲とする。そして、マッチング処理部227で求めた各分割パターン画像のマッチング位置を基に連結画像生成部で各分割パターン画像の連結画像を作成する。
【0046】
しかし、制約幅分の大きさの誤差が出る可能性がある。重複領域に特徴のあるパターンがあれば、マッチングは確定できる。そこで、重複領域に特徴のあるパターンが入るように撮像位置を変えることが考えられる。
【0047】
次に、図9を用いて本発明の撮像位置を変える装置構成を説明する。
【0048】
電子光学系1の説明は図1で説明したので省略する。設計データ記憶手段23から撮像位置変更手段24に撮像するパターンを含む設計データを取り込み、画像に変換して、変換した画像の重複領域を見て、特徴が在るか無いかを判別し特徴がより在る重複領域を探索する。特徴がより在る重複領域があれば、求めた重複領域に対応する撮像位置になるようにステージコントローラ11及びまたは偏向制御手段10に指示する。また、撮像した分割画像を連結する際、画像連結手段22に分割画像毎に重複領域の大きさを通知する。
【0049】
次に、図10を用いて特徴が在るか無いかを判別する際の特徴のあるパターンについて説明する。例えば図10(a)は4つの線分のパターンはあるが、全て同じ縦方向にあるため、マッチング処理をする際、横方向は一致する点は特定できるが、縦方向は特定できない。図10(b)は2つの線分のパターンであるが、方向が異なるため、縦方向,横方向は特定できる。図10(c)は斜め線で斜め方向で特定できるが、縦,横とも特定できない。図10(d)は1つの線でつながっているが、2つの方向の線分があるため、縦,横とも特定できる。そこで、特徴の有り無しの基準は、例えば、2つ以上の方向の異なる線があるがどうかで判定することが考えられる。そのため、設計データの情報が閉図形の頂点座標であれば、頂点から頂点を結ぶ線の方向は容易に求まる。パターン画像を生成する時点で予め撮像する位置が決まっていればパターンが重複領域に入るかどうか判るので、重複領域に入る頂点と頂点を結ぶ線が何本になるかも判る。つまり、重複領域に存在する線の何本数もそれぞれの方向や角度も容易に判る。そこで、重複領域に方向の異なる2つ以上の線分が有るか無いかで特徴パターンの有るか無いかを判定する。また、ここでは線分としたが、パターンの形状でもよい。例えば、縦,横,斜めなどに方向別にエッジ量を求めて、どの方向のパターンかを特定することができる。ここで、エッジ量とはフィルタ処理の出力とする。例えば、ラプラシアンフィルタ処理や縦,横,斜めのsobleフィルタ処理の出力を基に得た値とすることが考えられる。
【0050】
図11を用いて本発明の撮像位置変更手段の処理フローを説明する。設計データを用いてS31で重複領域に含まれるパターンの特徴量を算出する。ここでの特徴量は重複領域に存在する方向の異なる線分の数とする。S32で特徴量が閾値T1以上か否かで判定し、閾値T1以上であれば、s35で現重複領域の幅を記憶し、その重複領域に対応した撮像位置を求める。ここで閾値T1は方向の異なる線分の数とし、値は2とする。また、閾値T1以上でなければ、S33で重複領域の大きさを+d増やす。そしてS34で現重複領域の大きさが上限値のL1以上でないことを確認して、もし、上限値L1以上であれば、重複領域をL1としてS35で現重複領域の幅を記憶し、その重複領域に対応した撮像位置を求める。
【0051】
また、上限値でなければ、S31で重複領域に含まれるパターンの特徴量を検出し、以上の処理を繰り返す。
【0052】
また、シミュレーションで見たい箇所は最も問題の起こりそうな箇所と考えられ、必ずしも全てが必要でない場合もある。例えば、図12(a)に示す配線パターンがある場合、注目する箇所については、画像間の重複領域(切れ目)にならいように撮像する位置で撮像することが考えられる。例えば、矩形の角のように2つの線分の角度が90°になるような箇所を注目したい場合は、図12(b)のように分割した一枚の画像内に矩形の角が納まるように撮像することが考えられる。そして、さほど注目しない部分については、画像の何処にきてもいいので、例えば、注目したい箇所が画像の中央になるように他の部分の撮像位置をそれぞれずらしたり、もしくは、図12(a)のように満遍なく分割画像を取得した後に、注目しない部分を別途取得することも考えられる。このように注目する箇所が切れ目(重複領域)にしないようにすればマッチング精度の影響を防止できる。
【0053】
この場合は図13のようにユーザーが注目する領域の座標を指定することが考えられる。ここではユーザーが座標指示部40で座標を指示すると、指示された座標の領域は撮像する分割画像の中央になるように撮像位置変更手段24で撮像位置を求めて、偏向制御手段10,ステージコントローラ11で撮像位置を変更24する。この場合、ユーザーは設計データに基づいた画像を表示画面等で見ながら座標を指示することも考えられる。撮像位置変更手段24で求める撮像位置は撮像した画像の中央に座標指示部40で指示された領域がくる撮像位置である。
【0054】
ここではユーザーが指示することを記載したが、注目したいパターンはある程度特定したパターンになる場合が多い。そこで、図14に示すように予め注目するパターンをパターン登録部26に登録しておき、そのパターンが取得したい画像の範囲にあるかどうかを判定して、もし存在すればそのパターンについては画像の中央になるように撮像位置を変更することが考えられる。
【0055】
パターンがあるかどうかの判定は一般的なマッチング処理で実現できる。注目したいパターンと取得するパターンを含む設計データから画像に変換したパターン画像とでマッチング処理してマッチングする値が高い場合はその位置の注目したいパターンがあると判定し、その位置ある注目したいパターンが撮像する際に中央になる撮像位置に変更若しくは設定する。
【0056】
ここで、図13及び図14ではユーザーによる指示、または登録されたパターンとのマッチングで注目したいパターンを特定し、注目したいパターンが中央になる撮像位置に変更するが、特にそれに限らず、例えば、特徴のあるパターンを画像の切れ目(重複領域)にするようにすることも考えられる。つまり、ユーザーによる指示、または登録されたパターンとのマッチングで特徴のあるパターンを特定し、特徴のあるパターンが画像の切れ目(重複領域)になる撮像位置に変更することも考えられる。この特徴のあるパターンとは図10を用いて説明したパターンと考えてもよい。
【0057】
また、画像連結処理で分割画像は何枚必要かどうかユーザーが前もって設定したりするのは手間がかかる。しかし、画像連結処理が必要かどうか、または、分割画像は何枚必要かは、撮像する倍率での1枚の画像範囲と、ユーザーが取得したい画像範囲でおのずと判る。
【0058】
ユーザーが取得したい画像範囲が撮像する倍率での1枚の画像範囲より大きければ画像連結処理が必要とわかる。また分割画像数は例えば、横方向のみ考えるとユーザーが取得したい画像幅/撮像する倍率での1枚の画像幅−重複領域幅で必要な分割画像枚数がわかる。例えば、図15のように取得画像範囲指示部50を設けて、取得画像範囲をユーザーに設定してもらえばよい。撮像倍率での1枚の画像範囲もユーザーに設定してもらうか、もしくはシステム情報記憶部27にその情報を記憶させておいてもよい。撮像倍率はその撮像装置の限界性能であってもよい。そうすれば、システム情報記憶部は固定値となる。
【0059】
また、自動的に画像を連結させた場合、うまくつながらない場合は、欠陥により、実際につながってないのか、画像連結処理のマッチングの精度のためにつながってないのか判別できないと困る。そのため、図16のように画像連結処理通知手段60を設けて、画像連結処理を行った場合には画像連結処理を行ったことを通知する。例えば、LED照明の点灯でもよいし、ファイルに書き出してもよい。また、表示装置30に表示する連結画像を表示する際、画像連結処理を行った連結画像であることがわかるようにすることも考えられる。
【0060】
また、連結した画像の最初の若しくは最後の1画素ないし複数画素を異なる色や明るさで表示させる事や、線やマーカ等で表示させる事で、連結した位置の精度を目視でも確認することができる。
【0061】
また、撮像する範囲によって設計データを基にして求めた一連の分割画像の撮像位置を予め求めて記憶させておくことが考えられる。そうすれば、撮像する際に記憶させた撮像位置を読み出して撮像すればよい。
【0062】
また、以上の実施例では2次電子検出器で得た画像を用いた例をしめしたが、電子線を試料102に照射した際の2次反射電子を用いて生成した画像を用いることも考えられる。
【0063】
また、以上の実施例において、本発明の画像処理部2についてはソフト処理で行ってもよい。またその際、パソコンでソフト処理を行ってもいいし、LSIに組み込んでハード処理で行うことも可能である。
【0064】
以上説明したように、本発明においては、配線パターンは単調な画像が多いため、画像データだけでは貼り合せ位置を特定できない場合がある。一方、撮像した配線パターンを検査する際には電子デバイスパターンのレイアウト情報が記述された設計データを用いて検査している。この設計データを利用して分割画像間の貼り合せ位置を絞り、特定することができる。設計データであれば注目箇所の周囲のパターン情報を撮像することなく得て参照することができる。
【0065】
先ず、電子デバイスパターンを隣り合う画像領域が重なる重複領域を設けて分割して撮像して得た複数枚の分割画像データと撮像したそれぞれの分割画像の位置に対応する設計データとでマッチング処理を行う段階を設けて、大まかに貼り合せ位置を求める。マッチング処理したそれぞれの画像を設計データの基準に(設計データは全てつながるように)並べると、画像はつながらない箇所もある。撮像した画像は設計データを基に作成したものであるが、完全に一致するものはできない。そのため、マッチング処理しても多少ずれる。そのため、今度は分割画像間の重複領域の画像データを用いてマッチング処理を段階を設ける。この際、各画像と設計データとのズレ量をそれぞれ求めておき、設計データと画像でマッチングして求めた貼り合せ位置を原点として、求めたズレ量の範囲でマッチング処理を行うことで貼り合せ位置を特定する。
【0066】
また、目視で線を全て接続しても、設計データと画像のズレがある限り、連結した画像が実際の画像と一致しない場合もありえる。そのため、なるべく画像間の重複領域に特徴のあるパターンが存在するようにしたい。特徴とは縦,横,斜め方向別のエッジ量若しくはベクトル数及び又は方向の数として表し、これらの値が特定の値以上になるかどうかを判定する特徴パターン有無判定の手段を設ける。判定の結果が、特徴パターン有りと判定された場合は現状の撮像位置で撮像し、特徴パターン無しと判定された場合は特徴パターンが有ると判定する重複領域の長さを求めて、その重複領域の長さになる撮像位置に変更して撮像する。設計データを参考にすれば予め撮像位置にどのようなパターンがあるか判るので、設計データを基に、ステージを撮像する位置に移動させる撮像位置制御手段で撮像位置を変えることで、特徴のある重複領域の画像データを用いることができマッチング処理の精度を高める。また、シミュレーションのために撮像する一連の画像撮像位置について、予め特徴パターン判定手段を基に求めた撮像位置等を記憶しておく。
【0067】
また、シミュレーションで見たい箇所は最も問題の起こりそうな箇所と考えられ、必ずしも全てが必要でない場合もある。例えば、注目する箇所については、画像間の重複領域(切れ目)にならいように、画面の中央になるように、撮像する画像の位置に対応する設計データを基に、ステージを撮像する位置に移動させる撮像位置制御手段で、撮像位置を変えることで、注目する箇所についてはマッチング精度の影響を防止できる。
【0068】
また、撮像位置制御手段で、検査する範囲及び前記撮像手段の撮像分解能の情報を基に画像連結処理が必要か否かを判定し、撮像位置,読取回数等の設定を行うことができ、ユーザーは検査する範囲,撮像分解能のみ設定すれば、意識せずに自動的に適切な撮像位置,読取回数等を設定して撮像し、画像連結処理を施して、連結画像を得ることができ、使い勝手の向上も図ることができる。
【符号の説明】
【0069】
1 電子光学系
2 画像処理部
10 偏向制御手段
11 ステージコントローラ
12 A/D変換器
21,25 画像メモリ
22 画像連結手段
23 設計データ記憶手段
24 撮像位置変更手段
26 パターン登録部
27 システム情報記憶部
30 表示手段
40 座標指示部
50 取得画像範囲指示部
60画像連結処理通知手段
100 電子銃
101 2次電子検出器
102 試料
103 XYステージ
104 電子線
105 コンデンサレンズ
106 偏向器
107 ExB偏向器
108 対物レンズ
221 画素生成部
222 膨張処理部
223,227 マッチング処理部
224 制約幅算出部
225 制約幅記憶部
226 メモリ
228 連結画像生成部
500 基準座標系
501 パターン
2201 基準位置合せ部
2202 画像位置ズレ補正部
【特許請求の範囲】
【請求項1】
電子顕微鏡を用いた電子デバイスパターンの画像生成装置において、
電子デバイスパターンを撮像する撮像手段と、
前記撮像手段で撮像する電子デバイスを撮像する位置に移動させる撮像位置制御手段と、
前記電子デバイスパターンを撮像して得た複数枚の分割画像データを記憶する分割画像データを記憶する分割画像データ記憶手段と、
該分割画像データ記憶手段に格納されている複数枚の分割画像データを用いて1枚の画像データに連結する画像連結手段とを備え、
前記撮像位置制御手段は、検査する範囲及び前記撮像手段の撮像分解能の情報を基に画像連結処理が必要か否かを判定し、撮像位置の設定を行うことを特徴とする画像生成装置。
【請求項2】
請求項1の画像生成装置において、
前記画像連結処理を行った場合、ユーザーに画像連結処理を行ったことを通知することを特徴とする画像生成装置。
【請求項1】
電子顕微鏡を用いた電子デバイスパターンの画像生成装置において、
電子デバイスパターンを撮像する撮像手段と、
前記撮像手段で撮像する電子デバイスを撮像する位置に移動させる撮像位置制御手段と、
前記電子デバイスパターンを撮像して得た複数枚の分割画像データを記憶する分割画像データを記憶する分割画像データ記憶手段と、
該分割画像データ記憶手段に格納されている複数枚の分割画像データを用いて1枚の画像データに連結する画像連結手段とを備え、
前記撮像位置制御手段は、検査する範囲及び前記撮像手段の撮像分解能の情報を基に画像連結処理が必要か否かを判定し、撮像位置の設定を行うことを特徴とする画像生成装置。
【請求項2】
請求項1の画像生成装置において、
前記画像連結処理を行った場合、ユーザーに画像連結処理を行ったことを通知することを特徴とする画像生成装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【公開番号】特開2012−42483(P2012−42483A)
【公開日】平成24年3月1日(2012.3.1)
【国際特許分類】
【出願番号】特願2011−238165(P2011−238165)
【出願日】平成23年10月31日(2011.10.31)
【分割の表示】特願2007−333426(P2007−333426)の分割
【原出願日】平成19年12月26日(2007.12.26)
【出願人】(501387839)株式会社日立ハイテクノロジーズ (4,325)
【Fターム(参考)】
【公開日】平成24年3月1日(2012.3.1)
【国際特許分類】
【出願日】平成23年10月31日(2011.10.31)
【分割の表示】特願2007−333426(P2007−333426)の分割
【原出願日】平成19年12月26日(2007.12.26)
【出願人】(501387839)株式会社日立ハイテクノロジーズ (4,325)
【Fターム(参考)】
[ Back to top ]