
画像目標識別装置
【課題】目標の形状がはっきりしない場合や目標が遠方に位置するような場合でも精度の高い目標識別を行うことのできる画像目標識別装置を得る。
【解決手段】目標検出処理部2は、撮像映像信号10からランプを点滅させた目標を検出する。点滅周期測定部4は、ランプ点滅周期を測定し、第1の目標識別部5は、この点滅周期に基づいて目標識別を行う。点滅立ち上がり測定部6は、ランプの立ち上がり特性を測定し、第2の目標識別部7は、ランプの立ち上がり特性に基づいて目標識別を行う。
【解決手段】目標検出処理部2は、撮像映像信号10からランプを点滅させた目標を検出する。点滅周期測定部4は、ランプ点滅周期を測定し、第1の目標識別部5は、この点滅周期に基づいて目標識別を行う。点滅立ち上がり測定部6は、ランプの立ち上がり特性を測定し、第2の目標識別部7は、ランプの立ち上がり特性に基づいて目標識別を行う。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、船舶や航空機といった目標に搭載されているランプの点滅周期や点滅立ち上がり特性を画像情報から測定し、その測定結果に基づいて目標を識別する画像目標識別装置に関するものである。
【背景技術】
【0002】
従来、目標の画像を用いた目標識別装置としては、例えば特許文献1に示すように、予め目標の形状をデータベースとして設け、このデータベースの形状と識別対象となる目標の形状とを比較することで目標識別を行っていた。
【0003】
【特許文献1】特許第3510140号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
従来の画像目標識別装置では、目標の形状に基づいて目標識別を行っていたため、例えば、夜間時に取得した画像(目標の形状がはっきりしない画像)や、目標が遠方に位置する画像(画像上で目標が非常に微小な画像)では、目標識別が困難であったり、誤識別の恐れがあるといった問題点があった。
【0005】
この発明は上記のような課題を解決するためになされたもので、目標の形状がはっきりしない場合や目標が遠方に位置するような場合でも精度の高い目標識別を行うことのできる画像目標識別装置を得ることを目的とする。
【課題を解決するための手段】
【0006】
この発明に係る画像目標識別装置は、目標のランプ点滅周期を測定し、測定周期情報を送出する点滅周期測定部と、複数の目標のランプ点滅の測定周期情報の値をデータベースとして有し、測定周期情報とデータベースの値とを比較して目標識別結果を出力する第1の目標識別部とを備えたものである。
【発明の効果】
【0007】
この発明の画像目標識別装置は、目標のランプの点滅周期に基づいて目標を識別するようにしたので、目標の形状がはっきりしない場合や目標が遠方に位置するような場合でも精度の高い目標識別を行うことができる。
【発明を実施するための最良の形態】
【0008】
実施の形態1.
図1は、この発明の実施の形態1による画像目標識別装置を示す構成図である。
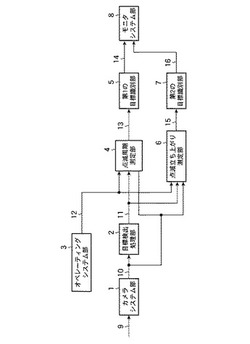
図において、画像目標識別装置は、カメラシステム部1、目標検出処理部2、オペレーティングシステム部3、点滅周期測定部4、第1の目標識別部5、点滅立ち上がり測定部6、第2の目標識別部7、モニタシステム部8を備えている。
【0009】
カメラシステム部1は、例えば、潜水艦の潜望鏡等の可視カメラや赤外カメラで構成されている。このカメラシステム部1は、可視光または赤外光が入力光9が入力され、その入力光9を、CCD、CMOS等で光/電気変換し、撮像映像信号10として、目標検出処理部2、点滅周期測定部4及び点滅立ち上がり測定部6に出力する。目標検出処理部2は、撮像映像信号10からランプを点滅させた目標を検出し、その位置座標を検出するよう構成されている。即ち、目標検出処理部2は、カメラシステム部1から出力された撮像映像信号10を入力し、その入力映像の中から目標と考えられる領域を検出し、その検出結果を位置座標信号11として、点滅周期測定部4及び点滅立ち上がり測定部6に出力する。
【0010】
オペレーティングシステム部3は、図示しないマンマシンインタフェースからオペレータの操作意思(目標識別を点滅周期測定部4あるいは点滅立ち上がり測定部6のどちらで実施するのか)が入力され、その操作意思をトリガ信号12として、点滅周期測定部4及び点滅立ち上がり測定部6に出力する機能部である。点滅周期測定部4は、カメラシステム部1から出力された撮像映像信号10、目標検出処理部2から出力された位置座標信号11及びオペレーティングシステム部3から出力されたトリガ信号12を入力し、トリガ信号12がONの場合のみ点滅周期を測定し、測定情報を点滅周期特性解析情報13として、第1の目標識別部5に出力するよう構成されている。第1の目標識別部5は、点滅周期測定部4から出力された点滅周期特性解析情報13を入力し、第1の目標識別部5内の図示省略したデータベースと比較処理を実施し、マッチする目標情報を検索し、検索結果を第1の目標識別結果14として、モニタシステム部8に出力する機能部である。
【0011】
点滅立ち上がり測定部6は、カメラシステム部1から出力された撮像映像信号10、目標検出処理部2からの位置座標信号11及びオペレーティングシステム部3からのトリガ信号12を入力し、トリガ信号12がONの場合のみ点滅立ち上がり測定を実施し、測定情報を立ち上がり特性解析情報15として第2の目標識別部7に出力するよう構成されている。第2の目標識別部7は、点滅立ち上がり測定部6から入力した立ち上がり特性解析情報15を第2の目標識別部7内の図示省略したデータベースの点滅立ち上がり特性と比較処理を行い、マッチする目標情報を検索し、検索結果を第2の目標識別結果16として、モニタシステム部8に出力する機能部である。モニタシステム部8は、ディスプレイ等を備え、第1の目標識別部5から出力された第1の目標識別結果14及び第2の目標識別部7から出力された第2の目標識別結果16を入力し、それらを目標識別結果として表示する。
【0012】
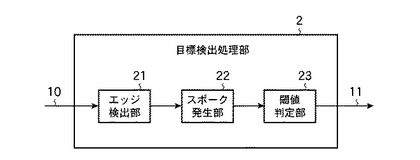
図2は、目標検出処理部2の詳細を示す構成図であり、これは、目標検出処理部2をスポークフィルタで構成したものである。
目標検出処理部2は、エッジ検出部21、スポーク発生部22及び閾値判定部23からなる。エッジ検出部21は、ラプラシアンフィルタなどからなり、入力された赤外画像等の撮像映像信号10の濃淡変化に基づいて画像のエッジを検出し、エッジ画像をスポーク発生部22へ出力する。スポーク発生部22は、エッジ検出部21でエッジとして検出された画素からスポークという線分をエッジ方向へ発生させる。そして、画素毎にスポークが交差している交差数をカウントし、交差数をカウントし、交差数を閾値判定部23に出力する。閾値判定部23では、予め定められた閾値と入力された交差数を比較し、閾値以上のスポーク交差数をもつ画素を選択する。そして、この検出した領域の座標を求め位置座標信号11として出力する。
【0013】
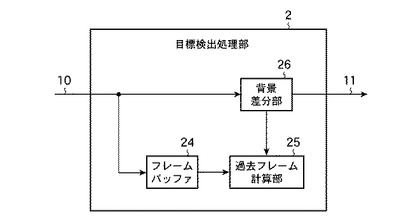
図3は、目標検出処理部2における他の例を示す構成図であり、これは、統計的2値化による背景差分から目標抽出を行うよう構成したものである。
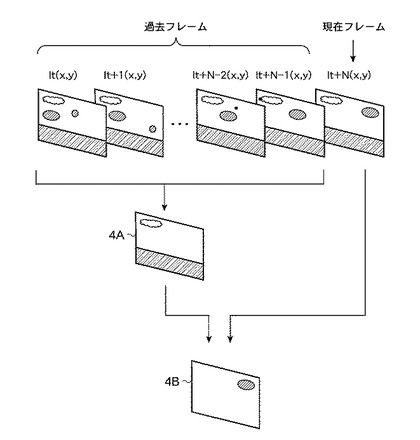
この目標検出処理部2では、フレームバッファ24、過去フレーム計算部25及び背景差分部26からなる。フレームバッファ24は、現在フレームより前の過去フレームを数フレーム記憶するバッファである。現在フレームをIt+N(x、y)とすると、過去フレームはIt+N-1(x、y)、It+N-2(x、y)、・・・、It(x、y)と表せる。図4は、このフレームの関係を示したものである。
【0014】
過去フレーム計算部25は、全領域の画素(x、y)についての平均m(x、y)、分散V(x、y)と標準偏差S(x、y)を、以下に示す式(1)、式(2)、式(3)により求める。
【数1】

【0015】
図4中における画像4Aは、式(1)で計算された平均画像を示している。平均を取るため、動いていない対象は濃度が高く、早く動く対象ほど濃度が低い画像となる。次に、背景差分部26は、過去フレーム計算部25で計算された0〜N−1までの平均m(x、y)と標準偏差S(x、y)を用いて現在フレームIt+N(x、y)を差分2値化する。
例えば、2値化の条件を下記のようにすれば、
If It+N(x、y)−m(x、y)>2.5S(x、y)
⇒Ot+N=255
else ⇒Ot+N=0
となり、上記Ot+Nが現フレームの出力2値化画素となる。つまり、分散S(s、y)が大きい(ノイジーな部分)ほど閾値が高く、分散S(x、y)が小さいほど閾値が低くなる。このようにすることにより、変化がない場所に目標が出現、または移動してくるとノイズとは区別して目標として検出することができる。図4中の画像4Bが目標検出画像である。
そして、この検出した領域の座標を位置座標信号11として出力する。
【0016】
次に、点滅周期測定部4について説明する。
一般に、船舶、航空機等に搭載されているランプの点滅特性、即ち点滅周期には個体差がある。そこで、点滅周期測定部4及び第1の目標識別部5では、その個体差を用いて目標識別を行う。
【0017】
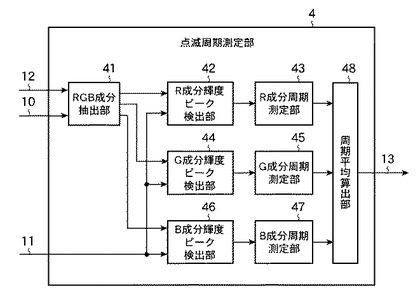
図5は、点滅周期測定部4の詳細を示す構成図である。
点滅周期測定部4は、RGB成分抽出部41、R成分輝度ピーク検出部42、R成分周期測定部43、G成分輝度ピーク検出部44、G成分周期測定部45、B成分輝度ピーク検出部46、B成分周期測定部47、周期平均算出部48からなる。
RGB成分抽出部41は、オペレーティングシステム部3から入力されるトリガ信号12がONの場合のみカメラシステム部1から入力された撮像映像信号10をRGB成分に分け、R成分映像をR成分輝度ピーク検出部42に、G成分映像をG成分輝度ピーク検出部44に、B成分映像をB成分輝度ピーク検出部46に出力する。入力される撮像映像信号10が、YPbPrの場合、以下に示す式(4)〜(6)を用いて、RGB成分に変換し、出力する。
【0018】
R=Y+1.5748・Pr (4)
G=Y−0.468・Pr−0.1873・Pb (5)
B=Y+1.8556・Pb (6)
【0019】
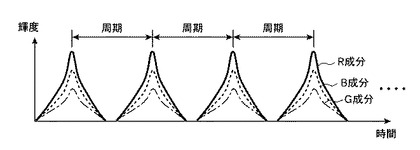
R成分輝度ピーク検出部42は、RGB成分抽出部41から入力されるR成分映像内の位置座標信号11にあたる画素の輝度値を継続的に測定し、輝度値のピーク値を検出し、検出したタイミングでR成分周期測定部43にタイミング信号を出力する。ランプの点滅周期を正確に測定するために、これは、一度のみならず、複数回繰り返し、タイミング信号を出力する。R成分周期測定部43は、繰り返し入力されるタイミング信号間の周期を測定し、複数測定されたR成分周期平均値を算出し、R成分周期平均値信号として、周期平均算出部48に出力する。図6は、これらの輝度ピークの検出と周期を示す説明図であり、図中のR成分の波形がR成分輝度ピーク検出部42及びR成分周期測定部43の処理に対応している。
【0020】
G成分輝度ピーク検出部44は、R成分と同様に、RGB成分抽出部41から入力されるG成分映像内の位置座標信号11にあたる画素の輝度値を継続的に測定し、輝度値のピーク値を検出し、検出したタイミングでG成分周期測定部45にタイミング信号を出力する。ランプの点滅周期を正確に測定するために、これも、一度のみならず、複数回繰り返し、タイミング信号を出力する。G成分周期測定部45では、繰り返し入力されるタイミング信号間の周期を測定し、複数測定されたG成分周期平均値を算出し、G成分周期平均値信号として、周期平均算出部48に出力する。これらG成分輝度ピーク検出部44及びG成分周期測定部45の処理が図6中のG成分の波形に対応するものである。
【0021】
B成分輝度ピーク検出部46は、R、G成分と同様に、RGB成分抽出部41から入力されるB成分映像内の位置座標信号11にあたる画素の輝度値を継続的に測定し、輝度値のピーク値を検出し、検出したタイミングでB成分周期測定部47にタイミング信号を出力する。ランプの点滅周期を正確に測定するために、これも、一度のみならず、複数回繰り返し、タイミング信号を出力する。B成分周期測定部47では、繰り返し入力されるタイミング信号間の周期を測定し、複数測定されたR成分周期平均値を算出し、B成分周期平均値信号として、周期平均算出部48に出力する。これらB成分輝度ピーク検出部46及びB成分周期測定部47の処理が図6中のB成分の波形に対応している。
【0022】
第1の目標識別部5では、点滅周期測定部4から入力された点滅周期特性解析情報13と、内部で保持している各種のランプの点滅周期のデータベースと比較処理を行い、目標識別を実施する。合致度の高い目標から任意の目標数を第1の目標識別結果14としてモニタシステム部8に出力する。
【0023】
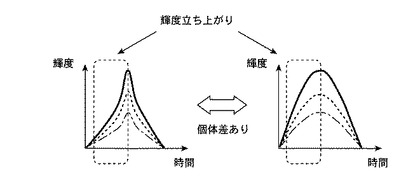
次に、点滅立ち上がり測定部6について説明する。
船舶、航空機等に搭載されているランプは、図7に示すように、消灯から点灯へ変化するとき、輝度の立ち上がり特性に個体差がある。そこで、点滅立ち上がり測定部6では、その個体差を検出し、第2の目標識別部7は個体差に基づいて目標識別を行う。
【0024】
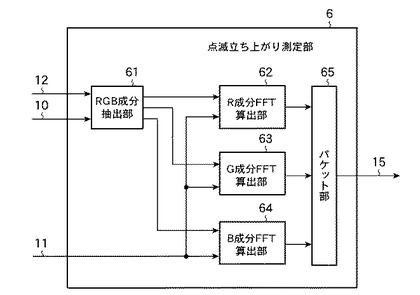
図8は、点滅立ち上がり測定部6の詳細を示す構成図である。
点滅立ち上がり測定部6は、RGB成分抽出部61、R成分FFT算出部62、G成分FFT算出部63、B成分FFT算出部64、パケット部65からなる。RGB成分抽出部61は、オペレーティングシステム部3から入力されるトリガ信号12がONの場合のみカメラシステム部1から入力された撮像映像信号10をRGB成分に分け、R成分映像をR成分FFT算出部62に、G成分映像をG成分FFT算出部63に、B成分映像をB成分FFT算出部64に出力する。入力される撮像映像信号10がYPbPrの場合、上述した式(4)〜(6)を用いて、RGB成分に変換し、出力する。
【0025】
R成分FFT算出部62では、目標検出処理部2から入力された位置座標信号11で指定されたRGB成分抽出部61から入力されたR成分映像の画素の輝度を点灯開始から消灯までを時間系列で測定し、横軸時間に対し、下式(7)のフーリエ変換を実施する。算出結果であるF(w)から振幅が最大となる周波数成分のみをパケット部65にR成分FFT算出結果として出力する。但し、このときより高精度な目標検出を実施する場合には、算出結果F(w)をそのままパケット部65にR成分FFT算出結果として出力する。そうすることにより、後段での第2の目標識別部7の識別の際に、複数の周波数成分を用いることができるため、高精度な識別が可能となるためである。R成分と同様に、G、B成分でもG成分FFT算出部63及びB成分FFT算出部64によって同様の処理を実施し、パケット部65にG、B成分FFT算出結果を出力する。パケット部65では、R、G、B成分FFT算出部62〜64から入力されたR、G、B成分FFT算出結果を第2の目標識別部7に送出できるようにパケット化する。
【0026】
【数2】
【0027】
第2の目標識別部7では、点滅立ち上がり測定部6から入力された立ち上がり特性解析情報15から第2の目標識別部7内で持っている各種のランプの点滅立ち上がり特性のデータベースと比較処理を行い、目標識別を実施する。立ち上がり特性解析情報15が振幅最大となる周波数成分のみである場合は、その振幅成分をデータベースと比較処理を行い、合致度が高い任意の目標数を第2の目標識別結果16としてモニタシステム部8に出力する。立ち上がり特性解析情報15がF(w)の場合、周波数毎に合致度を算出する。その後、周波数の振幅の大きさに合わせて、最終合致度を下式(8)に基づいて算出する。そして、最終合致度が高い任意の目標数を第2の目標識別結果16としてモニタシステム部8に出力する。
【0028】
【数3】
【0029】
モニタシステム部8では、入力された第1の目標識別結果14または第2の目標識別結果16をディスプレイで表示し、目標識別結果をオペレータに提供する。
尚、上記実施の形態では、点滅周期か点滅立ち上がり特性のいずれか一方で目標識別を行うようにしたが、これら点滅周期と点滅立ち上がり特定の両方の識別を行い、これらの結果をモニタシステム部8で表示するようにしてもよい。
【0030】
以上のように、実施の形態1の画像目標識別装置によれば、撮像画像からランプを点滅させた目標を検出する目標検出処理部と、目標のランプ点滅周期を測定し、測定周期情報を送出する点滅周期測定部と、複数の目標のランプ点滅の測定周期情報の値をデータベースとして有し、測定周期情報と、データベースの値とを比較し、目標識別結果を出力する第1の目標識別部とを備えたので、目標の形状がはっきりしない場合や目標が遠方に位置するような場合でも精度の高い目標識別を行うことができる。
【0031】
また、実施の形態1の画像目標識別装置によれば、撮像画像からランプを点滅させた目標を検出する目標検出処理部と、目標のランプ点滅の立ち上がり特性を解析し、その立ち上がり特性解析情報を送出する点滅立ち上がり測定部と、複数の目標のランプ点滅の立ち上がり特性解析情報の値をデータベースとして有し、立ち上がり特性解析情報と、データベースの値とを比較し、目標識別結果を出力する第2の目標識別部とを備えたので、目標の形状がはっきりしない場合や目標が遠方に位置するような場合でも精度の高い目標識別を行うことができる。
【0032】
また、実施の形態1の画像目標識別装置によれば、撮像画像からランプを点滅させた目標を検出する目標検出処理部と、目標のランプ点滅周期を測定し、測定周期情報を送出する点滅周期測定部と、複数の目標のランプ点滅の測定周期情報の値をデータベースとして有し、測定周期情報とデータベースの値とを比較し、目標識別結果を出力する第1の目標識別部と、目標のランプの点滅の立ち上がり特性を解析し、その立ち上がり特性解析情報を送出する点滅立ち上がり測定部と、複数の目標のランプ点滅の立ち上がり特性解析情報の値をデータベースとして有し、立ち上がり特性解析情報とデータベースの値とを比較し、目標識別結果を出力する第2の目標識別部と、第1の目標識別部及び第2の目標識別部の出力のうち、少なくともいずれか一方の出力を目標識別結果として表示するモニタシステム部とを備えたので、点滅周期と点滅立ち上がり特性の双方の目標識別結果を得ることができる。
【図面の簡単な説明】
【0033】
【図1】この発明の実施の形態1による画像目標識別装置を示す構成図である。
【図2】この発明の実施の形態1による画像目標識別装置の目標検出処理部の詳細を示す構成図である。
【図3】この発明の実施の形態1による画像目標識別装置の目標検出処理部の他の例の詳細を示す構成図である。
【図4】この発明の実施の形態1による画像目標識別装置の画像フレームの関係を示す説明図である。
【図5】この発明の実施の形態1による画像目標識別装置の点滅周期測定部の詳細を示す構成図である。
【図6】この発明の実施の形態1による画像目標識別装置の点滅周期を示す説明図である。
【図7】この発明の実施の形態1による画像目標識別装置に関する点滅立ち上がり特性の説明図である。
【図8】この発明の実施の形態1による画像目標識別装置の点滅立ち上がり測定部の詳細を示す構成図である。
【符号の説明】
【0034】
2 目標検出処理部、4 点滅周期測定部、5 第1の目標識別部、6 点滅立ち上がり測定部、7 第2の目標識別部、8 モニタシステム部、10 撮像映像信号、11 位置座標信号、13 点滅周期特性解析情報、14 第1の目標識別結果、15 立ち上がり特性解析情報、16 第2の目標識別結果。
【技術分野】
【0001】
この発明は、船舶や航空機といった目標に搭載されているランプの点滅周期や点滅立ち上がり特性を画像情報から測定し、その測定結果に基づいて目標を識別する画像目標識別装置に関するものである。
【背景技術】
【0002】
従来、目標の画像を用いた目標識別装置としては、例えば特許文献1に示すように、予め目標の形状をデータベースとして設け、このデータベースの形状と識別対象となる目標の形状とを比較することで目標識別を行っていた。
【0003】
【特許文献1】特許第3510140号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
従来の画像目標識別装置では、目標の形状に基づいて目標識別を行っていたため、例えば、夜間時に取得した画像(目標の形状がはっきりしない画像)や、目標が遠方に位置する画像(画像上で目標が非常に微小な画像)では、目標識別が困難であったり、誤識別の恐れがあるといった問題点があった。
【0005】
この発明は上記のような課題を解決するためになされたもので、目標の形状がはっきりしない場合や目標が遠方に位置するような場合でも精度の高い目標識別を行うことのできる画像目標識別装置を得ることを目的とする。
【課題を解決するための手段】
【0006】
この発明に係る画像目標識別装置は、目標のランプ点滅周期を測定し、測定周期情報を送出する点滅周期測定部と、複数の目標のランプ点滅の測定周期情報の値をデータベースとして有し、測定周期情報とデータベースの値とを比較して目標識別結果を出力する第1の目標識別部とを備えたものである。
【発明の効果】
【0007】
この発明の画像目標識別装置は、目標のランプの点滅周期に基づいて目標を識別するようにしたので、目標の形状がはっきりしない場合や目標が遠方に位置するような場合でも精度の高い目標識別を行うことができる。
【発明を実施するための最良の形態】
【0008】
実施の形態1.
図1は、この発明の実施の形態1による画像目標識別装置を示す構成図である。
図において、画像目標識別装置は、カメラシステム部1、目標検出処理部2、オペレーティングシステム部3、点滅周期測定部4、第1の目標識別部5、点滅立ち上がり測定部6、第2の目標識別部7、モニタシステム部8を備えている。
【0009】
カメラシステム部1は、例えば、潜水艦の潜望鏡等の可視カメラや赤外カメラで構成されている。このカメラシステム部1は、可視光または赤外光が入力光9が入力され、その入力光9を、CCD、CMOS等で光/電気変換し、撮像映像信号10として、目標検出処理部2、点滅周期測定部4及び点滅立ち上がり測定部6に出力する。目標検出処理部2は、撮像映像信号10からランプを点滅させた目標を検出し、その位置座標を検出するよう構成されている。即ち、目標検出処理部2は、カメラシステム部1から出力された撮像映像信号10を入力し、その入力映像の中から目標と考えられる領域を検出し、その検出結果を位置座標信号11として、点滅周期測定部4及び点滅立ち上がり測定部6に出力する。
【0010】
オペレーティングシステム部3は、図示しないマンマシンインタフェースからオペレータの操作意思(目標識別を点滅周期測定部4あるいは点滅立ち上がり測定部6のどちらで実施するのか)が入力され、その操作意思をトリガ信号12として、点滅周期測定部4及び点滅立ち上がり測定部6に出力する機能部である。点滅周期測定部4は、カメラシステム部1から出力された撮像映像信号10、目標検出処理部2から出力された位置座標信号11及びオペレーティングシステム部3から出力されたトリガ信号12を入力し、トリガ信号12がONの場合のみ点滅周期を測定し、測定情報を点滅周期特性解析情報13として、第1の目標識別部5に出力するよう構成されている。第1の目標識別部5は、点滅周期測定部4から出力された点滅周期特性解析情報13を入力し、第1の目標識別部5内の図示省略したデータベースと比較処理を実施し、マッチする目標情報を検索し、検索結果を第1の目標識別結果14として、モニタシステム部8に出力する機能部である。
【0011】
点滅立ち上がり測定部6は、カメラシステム部1から出力された撮像映像信号10、目標検出処理部2からの位置座標信号11及びオペレーティングシステム部3からのトリガ信号12を入力し、トリガ信号12がONの場合のみ点滅立ち上がり測定を実施し、測定情報を立ち上がり特性解析情報15として第2の目標識別部7に出力するよう構成されている。第2の目標識別部7は、点滅立ち上がり測定部6から入力した立ち上がり特性解析情報15を第2の目標識別部7内の図示省略したデータベースの点滅立ち上がり特性と比較処理を行い、マッチする目標情報を検索し、検索結果を第2の目標識別結果16として、モニタシステム部8に出力する機能部である。モニタシステム部8は、ディスプレイ等を備え、第1の目標識別部5から出力された第1の目標識別結果14及び第2の目標識別部7から出力された第2の目標識別結果16を入力し、それらを目標識別結果として表示する。
【0012】
図2は、目標検出処理部2の詳細を示す構成図であり、これは、目標検出処理部2をスポークフィルタで構成したものである。
目標検出処理部2は、エッジ検出部21、スポーク発生部22及び閾値判定部23からなる。エッジ検出部21は、ラプラシアンフィルタなどからなり、入力された赤外画像等の撮像映像信号10の濃淡変化に基づいて画像のエッジを検出し、エッジ画像をスポーク発生部22へ出力する。スポーク発生部22は、エッジ検出部21でエッジとして検出された画素からスポークという線分をエッジ方向へ発生させる。そして、画素毎にスポークが交差している交差数をカウントし、交差数をカウントし、交差数を閾値判定部23に出力する。閾値判定部23では、予め定められた閾値と入力された交差数を比較し、閾値以上のスポーク交差数をもつ画素を選択する。そして、この検出した領域の座標を求め位置座標信号11として出力する。
【0013】
図3は、目標検出処理部2における他の例を示す構成図であり、これは、統計的2値化による背景差分から目標抽出を行うよう構成したものである。
この目標検出処理部2では、フレームバッファ24、過去フレーム計算部25及び背景差分部26からなる。フレームバッファ24は、現在フレームより前の過去フレームを数フレーム記憶するバッファである。現在フレームをIt+N(x、y)とすると、過去フレームはIt+N-1(x、y)、It+N-2(x、y)、・・・、It(x、y)と表せる。図4は、このフレームの関係を示したものである。
【0014】
過去フレーム計算部25は、全領域の画素(x、y)についての平均m(x、y)、分散V(x、y)と標準偏差S(x、y)を、以下に示す式(1)、式(2)、式(3)により求める。
【数1】
【0015】
図4中における画像4Aは、式(1)で計算された平均画像を示している。平均を取るため、動いていない対象は濃度が高く、早く動く対象ほど濃度が低い画像となる。次に、背景差分部26は、過去フレーム計算部25で計算された0〜N−1までの平均m(x、y)と標準偏差S(x、y)を用いて現在フレームIt+N(x、y)を差分2値化する。
例えば、2値化の条件を下記のようにすれば、
If It+N(x、y)−m(x、y)>2.5S(x、y)
⇒Ot+N=255
else ⇒Ot+N=0
となり、上記Ot+Nが現フレームの出力2値化画素となる。つまり、分散S(s、y)が大きい(ノイジーな部分)ほど閾値が高く、分散S(x、y)が小さいほど閾値が低くなる。このようにすることにより、変化がない場所に目標が出現、または移動してくるとノイズとは区別して目標として検出することができる。図4中の画像4Bが目標検出画像である。
そして、この検出した領域の座標を位置座標信号11として出力する。
【0016】
次に、点滅周期測定部4について説明する。
一般に、船舶、航空機等に搭載されているランプの点滅特性、即ち点滅周期には個体差がある。そこで、点滅周期測定部4及び第1の目標識別部5では、その個体差を用いて目標識別を行う。
【0017】
図5は、点滅周期測定部4の詳細を示す構成図である。
点滅周期測定部4は、RGB成分抽出部41、R成分輝度ピーク検出部42、R成分周期測定部43、G成分輝度ピーク検出部44、G成分周期測定部45、B成分輝度ピーク検出部46、B成分周期測定部47、周期平均算出部48からなる。
RGB成分抽出部41は、オペレーティングシステム部3から入力されるトリガ信号12がONの場合のみカメラシステム部1から入力された撮像映像信号10をRGB成分に分け、R成分映像をR成分輝度ピーク検出部42に、G成分映像をG成分輝度ピーク検出部44に、B成分映像をB成分輝度ピーク検出部46に出力する。入力される撮像映像信号10が、YPbPrの場合、以下に示す式(4)〜(6)を用いて、RGB成分に変換し、出力する。
【0018】
R=Y+1.5748・Pr (4)
G=Y−0.468・Pr−0.1873・Pb (5)
B=Y+1.8556・Pb (6)
【0019】
R成分輝度ピーク検出部42は、RGB成分抽出部41から入力されるR成分映像内の位置座標信号11にあたる画素の輝度値を継続的に測定し、輝度値のピーク値を検出し、検出したタイミングでR成分周期測定部43にタイミング信号を出力する。ランプの点滅周期を正確に測定するために、これは、一度のみならず、複数回繰り返し、タイミング信号を出力する。R成分周期測定部43は、繰り返し入力されるタイミング信号間の周期を測定し、複数測定されたR成分周期平均値を算出し、R成分周期平均値信号として、周期平均算出部48に出力する。図6は、これらの輝度ピークの検出と周期を示す説明図であり、図中のR成分の波形がR成分輝度ピーク検出部42及びR成分周期測定部43の処理に対応している。
【0020】
G成分輝度ピーク検出部44は、R成分と同様に、RGB成分抽出部41から入力されるG成分映像内の位置座標信号11にあたる画素の輝度値を継続的に測定し、輝度値のピーク値を検出し、検出したタイミングでG成分周期測定部45にタイミング信号を出力する。ランプの点滅周期を正確に測定するために、これも、一度のみならず、複数回繰り返し、タイミング信号を出力する。G成分周期測定部45では、繰り返し入力されるタイミング信号間の周期を測定し、複数測定されたG成分周期平均値を算出し、G成分周期平均値信号として、周期平均算出部48に出力する。これらG成分輝度ピーク検出部44及びG成分周期測定部45の処理が図6中のG成分の波形に対応するものである。
【0021】
B成分輝度ピーク検出部46は、R、G成分と同様に、RGB成分抽出部41から入力されるB成分映像内の位置座標信号11にあたる画素の輝度値を継続的に測定し、輝度値のピーク値を検出し、検出したタイミングでB成分周期測定部47にタイミング信号を出力する。ランプの点滅周期を正確に測定するために、これも、一度のみならず、複数回繰り返し、タイミング信号を出力する。B成分周期測定部47では、繰り返し入力されるタイミング信号間の周期を測定し、複数測定されたR成分周期平均値を算出し、B成分周期平均値信号として、周期平均算出部48に出力する。これらB成分輝度ピーク検出部46及びB成分周期測定部47の処理が図6中のB成分の波形に対応している。
【0022】
第1の目標識別部5では、点滅周期測定部4から入力された点滅周期特性解析情報13と、内部で保持している各種のランプの点滅周期のデータベースと比較処理を行い、目標識別を実施する。合致度の高い目標から任意の目標数を第1の目標識別結果14としてモニタシステム部8に出力する。
【0023】
次に、点滅立ち上がり測定部6について説明する。
船舶、航空機等に搭載されているランプは、図7に示すように、消灯から点灯へ変化するとき、輝度の立ち上がり特性に個体差がある。そこで、点滅立ち上がり測定部6では、その個体差を検出し、第2の目標識別部7は個体差に基づいて目標識別を行う。
【0024】
図8は、点滅立ち上がり測定部6の詳細を示す構成図である。
点滅立ち上がり測定部6は、RGB成分抽出部61、R成分FFT算出部62、G成分FFT算出部63、B成分FFT算出部64、パケット部65からなる。RGB成分抽出部61は、オペレーティングシステム部3から入力されるトリガ信号12がONの場合のみカメラシステム部1から入力された撮像映像信号10をRGB成分に分け、R成分映像をR成分FFT算出部62に、G成分映像をG成分FFT算出部63に、B成分映像をB成分FFT算出部64に出力する。入力される撮像映像信号10がYPbPrの場合、上述した式(4)〜(6)を用いて、RGB成分に変換し、出力する。
【0025】
R成分FFT算出部62では、目標検出処理部2から入力された位置座標信号11で指定されたRGB成分抽出部61から入力されたR成分映像の画素の輝度を点灯開始から消灯までを時間系列で測定し、横軸時間に対し、下式(7)のフーリエ変換を実施する。算出結果であるF(w)から振幅が最大となる周波数成分のみをパケット部65にR成分FFT算出結果として出力する。但し、このときより高精度な目標検出を実施する場合には、算出結果F(w)をそのままパケット部65にR成分FFT算出結果として出力する。そうすることにより、後段での第2の目標識別部7の識別の際に、複数の周波数成分を用いることができるため、高精度な識別が可能となるためである。R成分と同様に、G、B成分でもG成分FFT算出部63及びB成分FFT算出部64によって同様の処理を実施し、パケット部65にG、B成分FFT算出結果を出力する。パケット部65では、R、G、B成分FFT算出部62〜64から入力されたR、G、B成分FFT算出結果を第2の目標識別部7に送出できるようにパケット化する。
【0026】
【数2】
【0027】
第2の目標識別部7では、点滅立ち上がり測定部6から入力された立ち上がり特性解析情報15から第2の目標識別部7内で持っている各種のランプの点滅立ち上がり特性のデータベースと比較処理を行い、目標識別を実施する。立ち上がり特性解析情報15が振幅最大となる周波数成分のみである場合は、その振幅成分をデータベースと比較処理を行い、合致度が高い任意の目標数を第2の目標識別結果16としてモニタシステム部8に出力する。立ち上がり特性解析情報15がF(w)の場合、周波数毎に合致度を算出する。その後、周波数の振幅の大きさに合わせて、最終合致度を下式(8)に基づいて算出する。そして、最終合致度が高い任意の目標数を第2の目標識別結果16としてモニタシステム部8に出力する。
【0028】
【数3】
【0029】
モニタシステム部8では、入力された第1の目標識別結果14または第2の目標識別結果16をディスプレイで表示し、目標識別結果をオペレータに提供する。
尚、上記実施の形態では、点滅周期か点滅立ち上がり特性のいずれか一方で目標識別を行うようにしたが、これら点滅周期と点滅立ち上がり特定の両方の識別を行い、これらの結果をモニタシステム部8で表示するようにしてもよい。
【0030】
以上のように、実施の形態1の画像目標識別装置によれば、撮像画像からランプを点滅させた目標を検出する目標検出処理部と、目標のランプ点滅周期を測定し、測定周期情報を送出する点滅周期測定部と、複数の目標のランプ点滅の測定周期情報の値をデータベースとして有し、測定周期情報と、データベースの値とを比較し、目標識別結果を出力する第1の目標識別部とを備えたので、目標の形状がはっきりしない場合や目標が遠方に位置するような場合でも精度の高い目標識別を行うことができる。
【0031】
また、実施の形態1の画像目標識別装置によれば、撮像画像からランプを点滅させた目標を検出する目標検出処理部と、目標のランプ点滅の立ち上がり特性を解析し、その立ち上がり特性解析情報を送出する点滅立ち上がり測定部と、複数の目標のランプ点滅の立ち上がり特性解析情報の値をデータベースとして有し、立ち上がり特性解析情報と、データベースの値とを比較し、目標識別結果を出力する第2の目標識別部とを備えたので、目標の形状がはっきりしない場合や目標が遠方に位置するような場合でも精度の高い目標識別を行うことができる。
【0032】
また、実施の形態1の画像目標識別装置によれば、撮像画像からランプを点滅させた目標を検出する目標検出処理部と、目標のランプ点滅周期を測定し、測定周期情報を送出する点滅周期測定部と、複数の目標のランプ点滅の測定周期情報の値をデータベースとして有し、測定周期情報とデータベースの値とを比較し、目標識別結果を出力する第1の目標識別部と、目標のランプの点滅の立ち上がり特性を解析し、その立ち上がり特性解析情報を送出する点滅立ち上がり測定部と、複数の目標のランプ点滅の立ち上がり特性解析情報の値をデータベースとして有し、立ち上がり特性解析情報とデータベースの値とを比較し、目標識別結果を出力する第2の目標識別部と、第1の目標識別部及び第2の目標識別部の出力のうち、少なくともいずれか一方の出力を目標識別結果として表示するモニタシステム部とを備えたので、点滅周期と点滅立ち上がり特性の双方の目標識別結果を得ることができる。
【図面の簡単な説明】
【0033】
【図1】この発明の実施の形態1による画像目標識別装置を示す構成図である。
【図2】この発明の実施の形態1による画像目標識別装置の目標検出処理部の詳細を示す構成図である。
【図3】この発明の実施の形態1による画像目標識別装置の目標検出処理部の他の例の詳細を示す構成図である。
【図4】この発明の実施の形態1による画像目標識別装置の画像フレームの関係を示す説明図である。
【図5】この発明の実施の形態1による画像目標識別装置の点滅周期測定部の詳細を示す構成図である。
【図6】この発明の実施の形態1による画像目標識別装置の点滅周期を示す説明図である。
【図7】この発明の実施の形態1による画像目標識別装置に関する点滅立ち上がり特性の説明図である。
【図8】この発明の実施の形態1による画像目標識別装置の点滅立ち上がり測定部の詳細を示す構成図である。
【符号の説明】
【0034】
2 目標検出処理部、4 点滅周期測定部、5 第1の目標識別部、6 点滅立ち上がり測定部、7 第2の目標識別部、8 モニタシステム部、10 撮像映像信号、11 位置座標信号、13 点滅周期特性解析情報、14 第1の目標識別結果、15 立ち上がり特性解析情報、16 第2の目標識別結果。
【特許請求の範囲】
【請求項1】
撮像画像からランプを点滅させた目標を検出する目標検出処理部と、
前記目標のランプ点滅周期を測定し、測定周期情報を送出する点滅周期測定部と、
複数の目標のランプ点滅の測定周期情報の値をデータベースとして有し、前記測定周期情報と、前記データベースの値とを比較し、目標識別結果を出力する第1の目標識別部とを備えた画像目標識別装置。
【請求項2】
撮像画像からランプを点滅させた目標を検出する目標検出処理部と、
前記目標のランプ点滅の立ち上がり特性を解析し、その立ち上がり特性解析情報を送出する点滅立ち上がり測定部と、
複数の目標のランプ点滅の立ち上がり特性解析情報の値をデータベースとして有し、前記立ち上がり特性解析情報と、前記データベースの値とを比較し、目標識別結果を出力する第2の目標識別部とを備えた画像目標識別装置。
【請求項3】
目標のランプの点滅の立ち上がり特性を解析し、その立ち上がり特性解析情報を送出する点滅立ち上がり測定部と、
複数の目標のランプ点滅の立ち上がり特性解析情報の値をデータベースとして有し、前記立ち上がり特性解析情報と、前記データベースの値とを比較し、目標識別結果を出力する第2の目標識別部と、
第1の目標識別部及び前記第2の目標識別部の出力のうち、少なくともいずれか一方の出力を目標識別結果として表示するモニタシステム部とを備えた請求項1記載の画像目標識別装置。
【請求項1】
撮像画像からランプを点滅させた目標を検出する目標検出処理部と、
前記目標のランプ点滅周期を測定し、測定周期情報を送出する点滅周期測定部と、
複数の目標のランプ点滅の測定周期情報の値をデータベースとして有し、前記測定周期情報と、前記データベースの値とを比較し、目標識別結果を出力する第1の目標識別部とを備えた画像目標識別装置。
【請求項2】
撮像画像からランプを点滅させた目標を検出する目標検出処理部と、
前記目標のランプ点滅の立ち上がり特性を解析し、その立ち上がり特性解析情報を送出する点滅立ち上がり測定部と、
複数の目標のランプ点滅の立ち上がり特性解析情報の値をデータベースとして有し、前記立ち上がり特性解析情報と、前記データベースの値とを比較し、目標識別結果を出力する第2の目標識別部とを備えた画像目標識別装置。
【請求項3】
目標のランプの点滅の立ち上がり特性を解析し、その立ち上がり特性解析情報を送出する点滅立ち上がり測定部と、
複数の目標のランプ点滅の立ち上がり特性解析情報の値をデータベースとして有し、前記立ち上がり特性解析情報と、前記データベースの値とを比較し、目標識別結果を出力する第2の目標識別部と、
第1の目標識別部及び前記第2の目標識別部の出力のうち、少なくともいずれか一方の出力を目標識別結果として表示するモニタシステム部とを備えた請求項1記載の画像目標識別装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【公開番号】特開2008−134150(P2008−134150A)
【公開日】平成20年6月12日(2008.6.12)
【国際特許分類】
【出願番号】特願2006−320476(P2006−320476)
【出願日】平成18年11月28日(2006.11.28)
【出願人】(000006013)三菱電機株式会社 (33,312)
【Fターム(参考)】
【公開日】平成20年6月12日(2008.6.12)
【国際特許分類】
【出願日】平成18年11月28日(2006.11.28)
【出願人】(000006013)三菱電機株式会社 (33,312)
【Fターム(参考)】
[ Back to top ]