
画像表示装置、画像表示システム、画像表示方法、及び画像表示プログラム
【課題】被写体の位置関係を容易に把握できる画像表示装置、画像表示システム、画像表示方法又は画像表示プログラムを提供する。
【解決手段】座標情報算出部は画像信号が表す被写体の座標情報を算出し、撮影画像合成部は前記座標情報算出部が算出した座標情報に基づいて前記入力された画像信号をある視点からの画像を表す合成撮影画像信号を生成し、干渉判定部は前記撮影画像合成部が生成した合成撮影画像信号と予め定めた被写体を表す基準画像信号とが干渉するか否かを判定し、視点更新部は前記干渉判定部が前記合成撮影画像信号と前記基準画像信号が干渉すると判定した場合、前記視点を更新する。
【解決手段】座標情報算出部は画像信号が表す被写体の座標情報を算出し、撮影画像合成部は前記座標情報算出部が算出した座標情報に基づいて前記入力された画像信号をある視点からの画像を表す合成撮影画像信号を生成し、干渉判定部は前記撮影画像合成部が生成した合成撮影画像信号と予め定めた被写体を表す基準画像信号とが干渉するか否かを判定し、視点更新部は前記干渉判定部が前記合成撮影画像信号と前記基準画像信号が干渉すると判定した場合、前記視点を更新する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、画像表示装置、画像表示システム、画像表示方法、及び画像表示プログラムに関する。
【背景技術】
【0002】
近年、車両に取付ける撮影装置(例えば、カメラ)等の周囲監視装置が開発されている。周囲監視装置には、複数の撮影装置が撮影した画像の視点方向をそれぞれ変換して合成する技術が提案されている。
例えば、特許文献1、2に記載の発明は、自車両の後方を撮影するリアカメラと、左側後方を撮影するレフトサイドカメラと、右側後方を撮影するライトサイドカメラの3つのカメラで撮影した画像信号を画像記憶部に記憶し、その画像を注視する位置である視点を自車両の真上に変換した画像信号を生成する。当該発明は、生成した画像信号と自車両の画像を表す画像信号とを合成して、俯瞰画像を表す画像信号を生成する。これにより、自車両を表す画像とともに他の被写体を表す画像を表示する俯瞰画像を生成することができ、運転者が自車両の周囲にある被写体の位置を直感的に把握できる。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2011−35816号公報
【特許文献2】特開2007−158426号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、特許文献1、2に記載の発明では、他の被写体の画像を表す画像信号と自車両の画像を表す画像信号を合成する際、他の被写体の画像の一部が自車両の一部に覆われることがある。そのため、生成した俯瞰画像では他の被写体の位置が運転者に把握しにくいという課題があった。
本発明はこのような課題に鑑みてなされたもので、被写体の位置関係を容易に把握できる画像表示装置、画像表示システム、画像表示方法又は画像表示プログラムを提供することを目的とする。
【課題を解決するための手段】
【0005】
(1)本発明は上記の課題を解決するためになされたものであり、本発明の一態様は、画像信号が表す被写体の座標情報を算出する座標情報算出部と、前記座標情報算出部が算出した座標情報に基づいて前記入力された画像信号をある視点からの画像を表す合成撮影画像信号を生成する撮影画像合成部と、前記撮影画像合成部が生成した合成撮影画像信号と予め定めた被写体を表す基準画像信号とが干渉するか否かを判定する干渉判定部と、前記干渉判定部が前記合成撮影画像信号と前記基準画像信号が干渉すると判定した場合、前記視点を更新する視点更新部とを備えることを特徴とする画像表示装置である。
【0006】
(2)本発明のその他の態様は、前記画像表示装置において、前記座標情報算出部は、前記視点として前記視点更新部が更新した視点情報が表す視点を用いて前記座標情報を算出することを特徴とする。
【0007】
(3)本発明のその他の態様は、前記視点から前記画像信号が表す被写体までの距離に基づいて拡大率を算出する拡大率算出部を備え、前記撮影画像合成部は、前記画像信号が表す被写体を前記拡大率算出部が算出した拡大率で拡大又は縮小するように前記合成撮影画像信号を生成することを特徴とする。
【0008】
(4)本発明のその他の態様は、前記画像表示装置において、前記干渉判定部は、前記合成撮影画像信号が表す被写体を表示する座標と前記基準画像信号が表す被写体の画像を表示する座標が重複するか否かにより、前記合成撮影画像信号と前記基準画像信号が干渉するか否かを判断することを特徴とする。
【0009】
(5)本発明のその他の態様は、画像を撮影する撮影装置と画像表示装置を備え、前記画像表示装置は、前記撮影装置から入力された画像信号が表す被写体の座標情報を算出する座標情報算出部と、前記座標情報算出部が算出した座標情報に基づいて前記入力された画像信号をある視点からの画像を表す合成撮影画像信号を生成する撮影画像合成部と、前記撮影画像合成部が生成した合成撮影画像信号と予め定めた被写体を表す基準画像信号とが干渉するか否かを判定する干渉判定部と、前記干渉判定部が前記合成撮影画像信号と前記基準画像信号が干渉すると判定した場合、前記視点を更新する視点更新部と、を備えることを特徴とする画像表示システムである。
【0010】
(6)本発明のその他の態様は、前記画像表示システムにおいて、前記撮影装置として複数個の撮影装置を互いに異なる位置に備え、前記撮影画像合成部は、前記複数個の撮影装置の各々から入力された画像信号に基づいて前記合成撮影画像信号を生成することを特徴とする。
【0011】
(7)本発明のその他の態様は、画像表示装置における画像表示方法において、前記画像表示装置が、画像信号が表す被写体の座標情報を算出する過程と、前記画像表示装置が、前記算出した座標情報に基づいて前記入力された画像信号をある視点からの画像を表す合成撮影画像信号を生成する過程と、前記画像表示装置が、前記生成した合成撮影画像信号と予め定めた被写体を表す基準画像信号とが干渉するか否かを判定する過程と、前記画像表示装置が、前記合成撮影画像信号と前記基準画像信号が干渉すると判定した場合、前記視点を更新する過程とを有することを特徴とする画像表示方法である。
【0012】
(8)本発明のその他の態様は、画像表示装置のコンピュータに、画像信号が表す被写体の座標情報を算出する手順、前記座標情報算出部が算出した座標情報に基づいて前記入力された画像信号をある視点からの画像を表す合成撮影画像信号を生成する手順、前記撮影画像合成部が生成した合成撮影画像信号と予め定めた被写体を表す基準画像信号とが干渉するか否かを判定する手順、前記干渉判定部が前記合成撮影画像信号と前記基準画像信号が干渉すると判定した場合、前記視点を更新する手順を実行させるための画像表示プログラムである。
【発明の効果】
【0013】
本発明によれば、被写体の位置関係を容易に把握することができる。
【図面の簡単な説明】
【0014】
【図1】本発明の第1の実施形態に係る画像表示システムの構成を示す概略図である。
【図2】本実施形態に係る撮影装置の構成を示す概略図である。
【図3】本実施形態に係る画像表示処理を表すフローチャートである。
【図4】本実施形態に係る撮影装置の配置の一例を示す概念図である。
【図5】本実施形態に係る撮影装置の配置の一例を示すその他の概念図である。
【図6】本実施形態に係る撮影装置の配置の一例を示すその他の概念図である。
【図7】本実施形態に係る撮像部が撮影した画像の一例を表す図である。
【図8】本実施形態に係る視点の一例を示す概念図である。
【図9】本実施形態に係る視点の一例を示すその他の概念図である。
【図10】表示用画像信号の一例を示す概念図である。
【図11】表示用画像信号のその他の例を表す概念図である。
【図12】本発明の第2の実施形態に係る画像表示システムの構成を示す概略図である。
【図13】本実施形態に係る拡大率算出部の処理を表すフローチャートである。
【図14】本実施形態に係る撮像部が備える光学系と被写体の位置関係の一例を示す概念図である。
【図15】表示用画像信号のその他の例を示す概念図である。
【図16】本発明の第3の実施形態に係る画像表示システムの構成を示す概略図である。
【図17】本発明の第4の実施形態に係る画像表示システムの構成を示す概略図である。
【発明を実施するための形態】
【0015】
(第1の実施形態)
以下、図面を参照しながら本発明の第1の実施形態について説明する。
図1は、本実施形態に係る画像表示システム1の構成を示す概略図である。
画像表示システム1は、撮影装置12−1〜12−4、画像表示装置13を含んで構成される。以下、撮影装置12−1〜12−4を総括する場合や、互いに区別する必要がない場合には撮影装置12−1等、又は撮影装置12と呼ぶ。撮影装置12−1等の配置については後述する。
【0016】
撮影装置12−1等は、撮影した画像を表す画像信号を画像表示装置13の距離情報算出部131−1等に出力する。
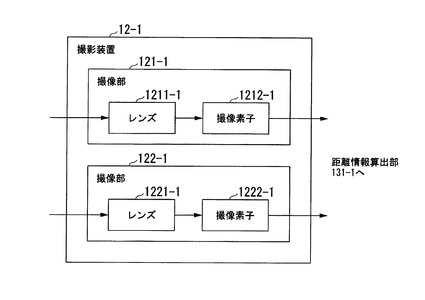
ここで、撮影装置12−1の構成例について説明する。撮影装置12−2〜12−4の構成は、例えば、撮影装置12−1とそれぞれ同様である。
図2は、本実施形態に係る撮影装置12−1の構成を示す概略図である。
撮影装置12−1は、2個の撮影部121−1、122−1を備える、いわゆる2眼カメラである。撮影部121−1は、レンズ1211−1と撮像素子1212−1を含んで構成され、撮影部122−1は、レンズ1221−1と撮像素子1222−1を含んで構成される、レンズ1211−1、1222−1は、被写体からの光線を透過し、撮像素子1212−1、1222−1の表面に結像させる。撮像素子1212−1、1222−1は、表面に結像した光線を画像信号に変換し、変換した画像信号を画像表示装置13の距離情報算出部131−1に出力する。
【0017】
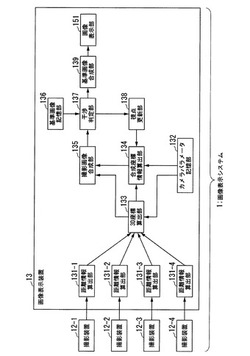
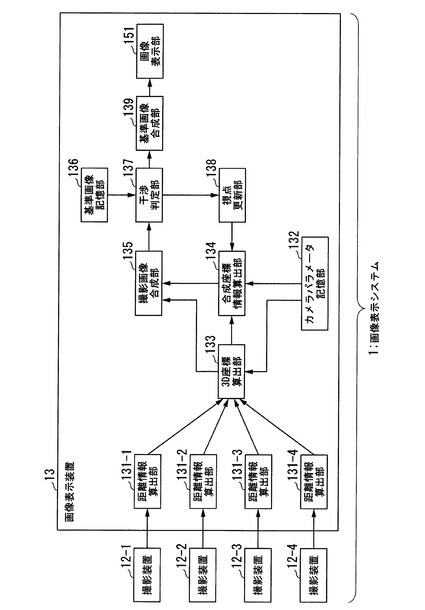
図1に戻り、画像表示装置13は、距離情報算出部131−1〜131−4、カメラパラメータ記憶部132、3D座標算出部133、合成座標情報算出部134、撮影画像合成部135、基準画像記憶部136、干渉判定部137、視点更新部138、基準画像合成部139及び画像表示部151を含んで構成される。
【0018】
距離情報算出部131−1等は、それぞれ撮像部121−1等、122−1等から入力された共通する被写体を表す画像信号間座標値の差である視差情報(視差マップ)を生成する。視差マップを生成する処理については後述する。また、視差情報は、後述するように被写体までの距離を表す情報である。距離情報算出部131−1等は、算出した視差情報を距離情報に変換して3D座標算出部133に出力する。また、距離情報算出部131−1等は、入力された画像信号を3D座標情報算出部133に出力する。
【0019】
カメラパラメータ記憶部132には、撮影装置12−1等による画像の撮影に係るパラメータ群を表すカメラパラメータ情報が予め記憶されている。カメラパラメータ情報は、例えば、撮影装置12−1等の位置情報、光軸方向情報、焦点距離情報、基線長情報、画素ピッチ情報を含む。ここで、位置情報とは、撮影装置12−1等が、設置される位置を表す情報である。光軸方向情報とは、レンズ1211−1等、レンズ1221−1の光軸の方向を表す情報である。焦点距離情報とは、レンズ1211−1等の中心部からレンズ1211−1等までの焦点までの距離である焦点距離を表す情報である。基線長情報とは、並列するレンズ1211−1等の中心部とレンズ1211−2等の中心部を結ぶ線分である基線の長さ、即ち、撮像部121−1等と撮影部122−1等の間隔を表す情報である。画素ピッチ情報とは、撮像素子1212−1等の画素間間隔を表す情報である。
【0020】
3D座標算出部133は、距離情報算出部131−1等から入力された距離情報ならびに画像信号と、カメラパラメータ記憶部132から読み出したカメラパラメータ情報に基づいて、被写体毎のカメラ座標系で表した3次元座標情報を算出する。3D座標算出部133が3次元座標情報を算出する処理については後述する。
3D座標算出部133は、算出した3次元座標情報を合成座標情報算出部134及び撮影画像合成部135に出力する。3D座標算出部133は、距離情報算出部131−1等から入力された画像信号を撮影画像合成部135に出力する。
【0021】
合成座標情報算出部134は、カメラパラメータ記憶部132から読み出したカメラパラメータ情報に基づき、3D座標算出部133から入力された3次元座標情報から、視点情報が表す視点を基準とした座標値を表す合成座標情報を算出する。合成座標情報算出部134が、視点更新部138から視点情報が入力される場合には、入力された視点情報を基準とした座標値を表す合成座標情報を算出する。
視点情報とは、被写体を視認する位置である視点を表す情報である。例えば、撮影装置12−1等から入力された画像信号の視点は、各撮影装置の設置位置である。視点は、必ずしも撮影装置の設置位置である必要はなく、仮想的な位置であってもよい。合成座標情報算出部134における視点情報の初期値は、ある基準点(原点)から予め定めた位置、例えば画像表示システム1を搭載する自車両の先頭部中心をその基準点とし、その基準点から前方に10m、上方に2m、離れた位置である。合成座標情報算出部134が合成座標情報を算出する処理については後述する。
合成座標情報算出部134は、算出した合成座標情報とその合成座標情報を算出するために用いた視点情報を撮影画像合成部135に出力する。
ここで、算出された合成座標情報が表す座標値は、撮影装置12−1等に関わらず全ての撮影領域に共通な座標系(世界座標系)による座標値である。
【0022】
撮影画像合成部135は、合成座標情報算出部134から入力された視点情報と合成座標情報に基づき、3D座標算出部133から入力された撮影装置毎の画像信号を入力された視点情報に対応する画像信号に変換する。これにより、撮影画像合成部135は、視点情報が示す共通の視点から視認される画像を表す視点画像信号を生成する。撮影画像合成部135が、視点画像信号に変換する処理については後述する。
【0023】
撮影画像合成部135は、変換した撮影装置毎の視点画像信号を合成して合成撮影画像信号を生成する。複数の画像信号間で共通する被写体を表す部分の画素値を一意に定めるため、撮影画像合成部135は、例えばOR描画処理を行って、合成撮影画像信号を生成する。OR描画処理では、対象となる複数の画像信号間で各1個の座標の画素しかない場合には、その座標の画素値をそのまま採用する。他方、その複数の画像信号間で共通する座標の画素が複数個存在する場合、複数個のうち輝度値が最大となる画素値を、その座標の画素値として選択する。
撮影画像合成部135は、生成した合成撮影画像信号と合成座標情報算出部134から入力された視点情報を干渉判定部137に出力する。
【0024】
基準画像記憶部136には、予め定めた被写体(例えば、画像表示システム1を搭載する自車両)を表す画像信号が基準画像信号として記憶されている。基準画像記憶部136に、異なる視点毎の被写体を表す基準画像信号と視点情報とを対応付けて記憶させておくことは、その具体的な実施の一例である。
干渉判定部137は、撮影画像合成部135から入力された視点情報に対応する基準画像信号を基準画像記憶部136から読み出す。干渉判定部137は、撮影画像合成部135から入力された合成撮影画像信号と、基準画像記憶部136から読み出した基準画像信号とが干渉するか否かを判定する。複数の画像信号が干渉するとは、各画像信号が含む座標のうち画像信号間で共通する座標の画素値があることを指す。
干渉判定部137は、合成撮影画像信号と基準画像信号が干渉しないと判定した場合、入力された合成撮影画像信号と読み出した基準画像信号を基準画像合成部139に出力する。
干渉判定部137は、合成撮影画像信号と基準画像信号が干渉すると判定した場合、干渉することを示す干渉判定信号を、視点更新部138に出力する。
【0025】
視点更新部138は、干渉判定部137から干渉判定信号が入力された場合、視点情報を更新し、更新した視点情報を合成座標情報算出部134に出力する。
視点更新部138は、例えば、上述の基準点を通過する水平方向又は垂直方向の座標軸との方位角が予め設定された微小量(例えば、0.1〜1度)ずつ変化するように視点情報を更新してもよい。また、視点更新部138は、原点からの距離が予め設定された微小量(例えば、0.01〜0.2m)ずつ増加するように視点情報を更新してもよいし、これらの任意の組み合わせであってもよい。視点更新部138は、このようにして被写体全体を俯瞰できる位置に視点情報を更新する。
【0026】
基準画像合成部139は、干渉判定部137から入力された合成撮影画像信号と基準画像信号について、例えば、OR描画処理を行うことにより合成して表示用画像信号を生成する。基準画像合成部139は、合成した表示用画像信号を画像表示部151に出力する。
画像表示部151は、基準画像合成部139から入力された表示用画像信号が表す画像を表示する。画像表示部151は、例えばディスプレイユニットである。
【0027】
次に、画像表示装置13が行う画像表示処理について説明する。
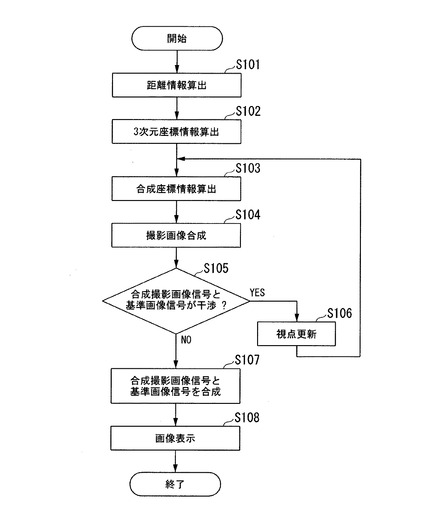
図3は、本実施形態に係る画像表示処理を表すフローチャートである。
(ステップS101)距離情報算出部131−1等は、撮像部121−1等、122−1等から入力された画像信号に基づいて距離情報を生成し、生成した距離情報を3D座標情報算出部133に出力する。距離情報算出部131−1等は、入力された画像信号を3D座標情報算出部133に出力する。その後、ステップS102に進む。
(ステップS102)3D座標算出部133は、距離情報算出部131−1等から入力された距離情報と、カメラパラメータ記憶部132から読み出したカメラパラメータ情報に基づいて、3次元座標情報を算出する。3D座標算出部133は、算出した3次元座標情報を合成座標情報算出部134及び撮影画像合成部135に出力する。3D座標算出部133は、距離情報算出部131−1等から入力された画像信号を撮影画像合成部135に出力する。その後、ステップS103に進む。
【0028】
(ステップS103)合成座標情報算出部134は、カメラパラメータ記憶部132から読み出したカメラパラメータ情報に基づき、3D座標算出部133から入力された3次元座標情報から、視点情報が表す視点を基準とした座標値を表す合成座標情報を算出する。視点更新部138から視点情報が入力される場合には、合成座標情報算出部134は、入力された視点情報を用いて合成座標情報を算出する。合成座標情報算出部134は、算出した合成座標情報とその合成座標情報を算出するために用いた視点情報を撮影画像合成部135に出力する。その後、ステップS104に進む。
【0029】
(ステップS104)撮影画像合成部135は、合成座標情報算出部134から入力された合成座標情報に基づき、3D座標算出部133から入力された撮影装置毎の画像信号を、合成座標情報算出部134から入力された視点情報に対応する視点画像信号に変換する。
撮影画像合成部135は、変換した撮影装置毎の視点画像信号を合成して合成撮影画像信号を生成する。撮影画像合成部135は、生成した合成撮影画像信号と変換を行う際に用いた視点情報を干渉判定部137に出力する。その後、ステップS105に出力する。
【0030】
(ステップS105)干渉判定部137は、撮影画像合成部135から入力された視点情報に対応する基準画像信号を基準画像記憶部136から読み出す。干渉判定部137は、撮影画像合成部135から入力された合成撮影画像信号と、基準画像記憶部136から読み出した基準画像信号とが干渉するか否かを判定する。
干渉判定部137は、入力された合成撮影画像信号と、読み出した基準画像信号とが干渉すると判定した場合(ステップS105 Y)、ステップS106に進む。干渉判定部137は、入力された合成撮影画像信号と、読み出した基準画像信号とが干渉しないと判定した場合(ステップS105 N)、入力された合成撮影画像信号と読み出した基準画像信号を基準画像合成部139に出力し、ステップS107に進む。
【0031】
(ステップS106)視点更新部138は、視点情報を更新し、更新した視点情報を合成座標情報算出部134に出力する。その後、ステップS103に進む。
(ステップS107)基準画像合成部139は、干渉判定部137から入力された合成撮影画像信号と基準画像信号を合成して、表示用画像信号を生成する。基準画像合成部139は、合成した表示用画像信号を画像表示部151に出力する。その後、ステップS108に進む。
(ステップS108)画像表示部151は、基準画像合成部139から入力された表示用画像信号が表す画像を表示する。その後、処理を終了する。
【0032】
次に、撮影装置12−1等の配置の一例について図面を用いて説明する。
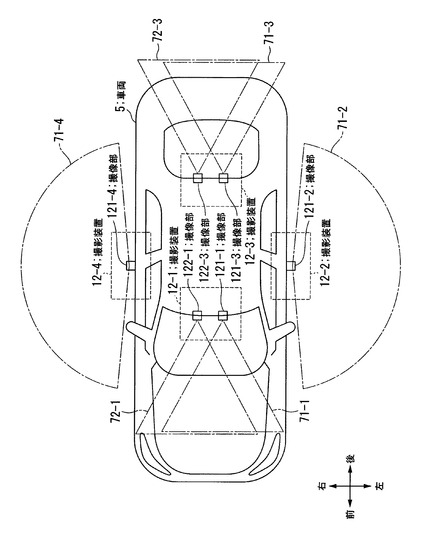
図4は、本実施形態に係る撮影装置12−1〜12−4の配置の一例を示す概念図である。
図4は、車両5の上面全体を示す。車両5は、画像表示システム1を搭載する自車両である。図4において、左側が車両5の前方、右側が車両5の後方、上方が車両5の右側方、下方が車両5の左側方である。
図4は、撮影装置12−1等の設置位置を破線の四角で示す。撮像部121−1等の設置位置を□印で示す。撮像部121−1、122−1、121−3及び122−3に接する頂点をもつ一点鎖線で示される三角形の領域71−1、72−1、71−3及び72−3は、撮像部121−1、122−1、121−3及び122−3の視野をそれぞれ示す。撮像部121−2及び121−4に接する頂点をもつ一点鎖線で示される扇形の領域71−2及び72−4は、撮像部121−2及び121−4等の視野をそれぞれ示す。
撮像部121−2及び121−4に接する頂点をもつ一点鎖線で示される扇形の領域71−2及び72−4は、撮像部121−2及び121−4等の視野をそれぞれ示す。
このように本実施形態では、複数の撮影装置12−1等を備え、撮影した画像信号を合成するため、広範囲にわたる周囲情報を取得することができる。
【0033】
撮影装置12−1が取り付けられる位置は、車両5のフロントガラス上方の中心部である。撮像部121−1と撮像部122−1は、車両5の左右方向に並列されている。撮影装置12−2が取り付けられる位置は、車両5の左側面の中心部である。撮像部121−2は、撮像部122−2の直上となるように垂直方向に並列されている。撮影装置12−3が取り付けられる位置は、車両5のリヤガラス上方の中心部である。撮像部121−3と撮像部122−3は、車両5の左右方向に並列されている。撮影装置12−4が取り付けられる位置は、車両5の右側面の中心部である。撮像部121−4は、撮像部122−4の直上となるように垂直方向に並列されている。
【0034】
撮像部121−1〜122−4の光軸の方向は、いずれも水平面に平行な方向である。但し、撮像部121−1、122−1の光軸の方向は、いずれも車両5の前方である。撮像部121−2、122−2の光軸の方向は、車両5の左側方である。撮像部121−3、122−3の光軸の方向は、車両5の後方である。撮像部121−4、122−4の光軸の方向は、車両5の右側方である。
【0035】
図4において、撮像部121−1、122−1の水平方向の視野71−1、72−1は、車両5の前方を中心に運転者の視野を網羅する角度、例えば60°である。
撮像部121−2の水平方向の視野71−2は、車両5の左側方を中心として180°に近い十分大きい角度、例えば160°であり、車両5の左前方10°から左真横を経て左後方10°に至る。撮像部122−2の水平方向の視野は、撮像部121−2と同様である。
撮像部121−3、122−3の水平方向の視野71−3、72−3は、車両5の後方を中心に後進時に運転者の視野を網羅する角度、例えば60°である。
撮像部121−4の水平方向の視野71−4は、車両5の右側方を中心として180°に近い十分大きい角度、例えば160°であり、車両5の右前方10°から右真横を経て右後方10°に至る。撮像部122−4の水平方向の視野は、撮像部121−4と同様である。
【0036】
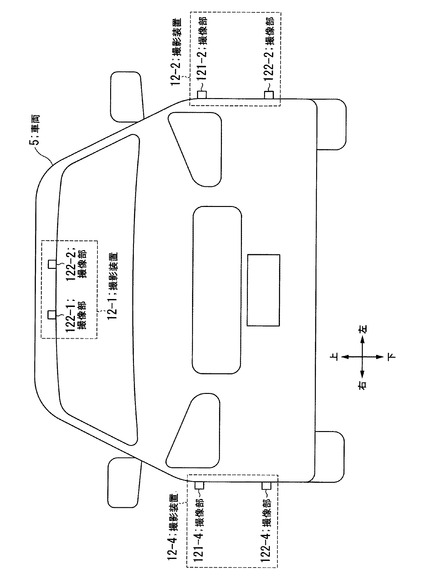
図5は、本実施形態に係る撮影装置12−1〜12−3の配置の一例を示すその他の概念図である。
図5は、車両5の前面全体を示す。図5において、左側が車両5の右側方、左側が車両5の左側方、上方が車両5の上方、下方が車両5の下方である。
図5は、撮影装置12−1〜12−3が前述の位置に設置されていることを示す。
【0037】
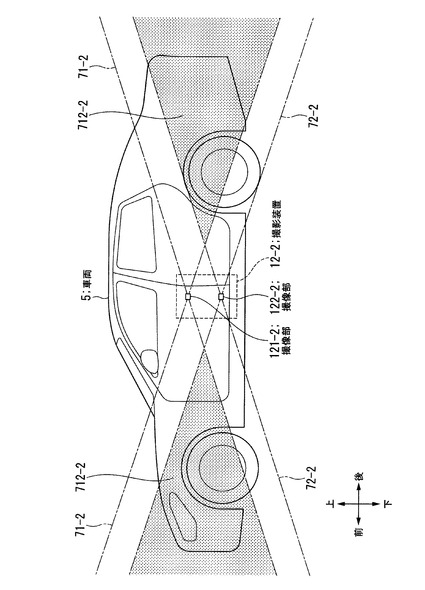
図6は、本実施形態に係る撮影装置12−2の配置の一例を示すその他の概念図である。
図6は、車両5の左側面全体を示す。図6において、左側が車両5の前方、右側が車両5の後方、上方が車両5の上方、下方が車両5の下方である。
図6は、撮影装置12−2が前述の位置に設置されていることを示す。
図6において、撮像部121−2の左右に広がる一点鎖線で示す三角形の領域71−2は、撮像部121−2の上下方向の視野を表す。撮像部122−2の左右に広がる一点鎖線で示す三角形の領域72−2は、撮像部122−2の上下方向の視野を表す。三角形の領域71−2、72−2が重なる塗りつぶし部分712−2は、撮像部121−2、122−2の視野が重複する領域である。従って、撮像部121−2、122−2は、この領域に位置する被写体を表す画像をともに撮影することができ、共通する被写体を表す画像が後述する距離情報の算出に用いられる。
【0038】
続いて、距離情報算出部131−1等が行う処理についてより具体的に説明する。
距離情報算出部131−1等は、撮影装置12−1等の撮像部121−1、122−1から各々入力された画像信号に基づいて撮像部121−1、122−1間における視差情報を画素毎に算出する。視差とは、異なる撮影装置から入力された画像信号が表す共通の被写体を表す画素位置の差分である。距離情報算出部131−1等は、算出した視差情報を距離情報として3D座標算出部133に出力する。距離情報算出部131−1等は、撮影装置12−1等の撮像部121−1等及び122−1等から入力された画像信号のうち何れか一方、例えば撮像部121−1等からの画像信号を3D座標算出部133に出力する。
【0039】
視差情報を算出するために、距離情報算出部131−1等は、例えばブロックマッチング(block matching)を行う。ブロックマッチングにおいて、距離情報算出部131−1等は一方の画像信号の一部である画像ブロックと他方の画像信号の一部である画像ブロックの画素値の類似性を表す評価値を算出し、最も類似することを表す評価値が算出される画像ブロックを他方の画像信号から探索する。評価値は、例えば、差分絶対和(SAD、Sum of Absolute Difference)である。距離情報算出部131−1等は、両画像信号が共通に表す被写体の対応する部位間の視差を算出する。
【0040】
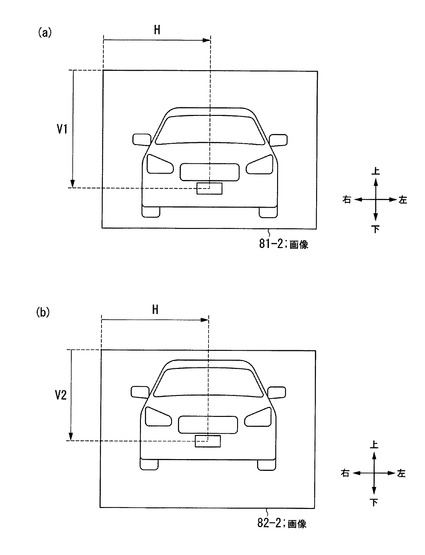
ここで、撮像部121−2、122−2が撮影した画像の一例について述べる。
図7は、本実施形態に係る撮像部121−2、122−2が撮影した画像の一例を表す図である。
図7(a)は、撮像部121−2が撮影した画像81−2を表す。画像81−2は被写体として他の車両を表す画像である。図7(b)は、撮像部122−2が撮影した画像82−2を表す。画像82−2は被写体として画像81−2が表す車両と共通する車両を表す。画像82−2に表される車両の位置は、画像81−2よりも垂直方向の正方向(上方)にずれている。これは、画像82−2を撮影した撮像部122−2が画像81−2を撮影した撮像部121−2よりも垂直方向の負方向(下方)に離れた位置に設置されているためである。
【0041】
図7(a)、(b)はともに、画像81−2の画像ブロックと画像82−2において同一の被写体である車両を表す画像ブロックを表す。画像81−2が表す車両のナンバープレートの中央部の水平方向の座標はH、垂直方向の座標はV1である。この部位に対応する、画像82−2の水平方向の座標はH、垂直方向の座標はV2である。画像81−2、82−2間の垂直方向の座標の差分V1−V2が視差である。
上述のように、視差は、撮影装置12−2から被写体までの距離Zを表す。視差V1−V2と距離Zとの間には、例えば式(1)に示す関係がある。
【0042】
【数1】

【0043】
式(1)において、fは、撮像部121−2、122−2の焦点距離、Bは基線長、pは画素ピッチを表す。視差は、撮影装置から被写体までの距離によって異なる値をとる。視差は、例えば、被写体が無限遠にあるとき0であり、撮影装置から被写体までの距離が短くなるほど大きくなる。
【0044】
次に、3D座標算出部133が3次元座標情報を算出する処理についてより具体的に説明する。
3D座標算出部133は、距離情報算出部131−1等から画像信号と、距離情報として視差情報を入力される。3D座標算出部133は、カメラパラメータ記憶部132からカメラパラメータ情報として、撮影装置12−1等の焦点距離情報、基線長情報及び画素ピッチ情報を読み出す。
【0045】
3D座標算出部133は、入力された画像信号における画素(i,j)の座標(ui,vj)を、例えば式(2)を用いてレンズ1211−1等を原点とするカメラ座標系による3次元座標情報(Xa,Ya,Za)に変換する。ここで、座標(ui,vj)は、レンズ1211−1等を原点とする画像座標系による座標情報である。
【0046】
【数2】
【0047】
式(2)において、D(i,j)は、画素(i,j)における視差を表す。即ち、式(2)における、水平方向の座標値Xa、垂直方向の座標値Ya、奥行方向の座標値Zaは、それぞれ撮像素子1212−1等における画素(i,j)の水平方向の座標値ui、垂直方向の座標値vj又は奥行方向の座標fに、それぞれ基線長Bを乗じた値を視差D(i,j)で除した値である。
なお、カメラ座標系は、各撮影装置12−1等が設置された位置(例えば、レンズ1211−1等)を原点とし、撮像素子1212−1等に結像した画像の水平方向ならびに垂直方向、及び光軸方向の座標軸を有する3次元直交座標系である。
【0048】
次に、合成座標情報算出部134が合成座標情報を算出する処理についてより具体的に説明する。
合成座標情報算出部134は、世界座標系の原点を上述の視点情報が表す視点と定め、その視点に対応する座標軸を定める。合成座標情報算出部134は、例えば、視点から上述の基準点への座標軸を奥行方向の座標を表すZ軸と定め、視点を通過しZ軸と垂直であって水平方向に平行な方向に向く座標軸をX軸と定め、視点を通過しZ軸と垂直であってX軸と垂直な座標軸をY軸と定める。
合成座標情報算出部134は、入力された3次元座標情報が示すカメラ座標系における座標値(Xa,Ya,Za)を、例えば式(3)を用いて世界座標系における座標値(Xo,Yo,Zo)を示す合成座標情報に変換する。
【0049】
【数3】
【0050】
式(3)において、Rはカメラ座標系における座標軸を世界座標系における座標軸に回転させることを示す回転行列、Tは座標系間における原点の位置のずれを表す並進ベクトルである。即ち、回転行列Rは、上述の世界座標系の座標軸と、カメラパラメータ情報に含まれる撮影装置12−1等の光軸方向情報によって定められ、並進ベクトルTは、カメラパラメータ情報に含まれる撮影装置12−1等が設置される位置、予め設定された基準点の位置及び上述の視点によって定められる。回転行列Rの各成分は、例えば式(4)のように表される。
【0051】
【数4】
【0052】
式(4)において、θxは、世界座標系におけるx軸回りのカメラ座標系のx軸の回転角、θyは、世界座標系におけるy軸回りのカメラ座標系のy軸の回転角、θzは、世界座標系におけるz軸回りのカメラ座標系のz軸の回転角をそれぞれ示す。
並進ベクトルTの各成分は、(Δx,Δy,Δz)と表される。Δxは、カメラ座標系の原点から世界座標系の原点までのx軸方向の移動量、Δyは、カメラ座標系の原点から世界座標系の原点までのy軸方向の移動量、Δzは、カメラ座標系の原点から世界座標系の原点までのz軸方向の移動量をそれぞれ示す。
従って、式(4)は、カメラ座標系における座標値(Xa,Ya,Za)に、両座標系の座標軸の回転を表す回転行列Rを乗じ、さらに両座標系の原点の移動を表す並進ベクトルTを加算して世界座標系における座標値(Xo,Yo,Zo)を算出することを表す。
【0053】
次に、撮影画像合成部135が行う画像信号変換処理についてより具体的に説明する。
撮影画像合成部135は、合成座標情報算出部134から入力された合成座標情報が表す世界座標系における座標値(Xo,Yo,Zo)を、視点を原点とするカメラ座標系における座標値(uo,vo)に、例えば式(5)を用いて変換する。
【0054】
【数5】
【0055】
式(5)は、世界座標系における座標値のうち、水平成分Xoと垂直成分Yoをそれぞれ奥行成分Zoと焦点距離fとの比Zo/fで規格化してカメラ座標系における座標値(uo,vo)を算出することを示す。
【0056】
撮影画像合成部135は、3D座標算出部133から入力された撮影装置毎の画像信号の各画素(i,j)における画素値を、算出した座標値(uo,vo)における画素に割り当てることによって上述の視点に対応する視点画像信号を生成する。
このようにして、撮影画像合成部135は、撮影装置毎に異なる視点の画像信号を共通する視点情報に対応する視点画像信号に変換する。上述のように、撮影画像合成部135は、変換した視点画像信号を撮影装置間で合成して合成撮影画像信号を生成する。
【0057】
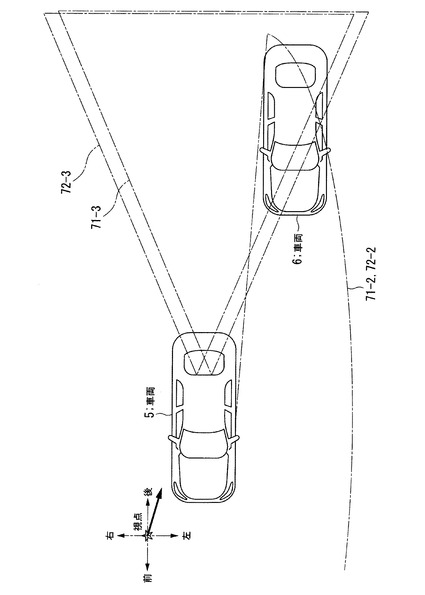
次に、本実施形態に係る視点の一例について説明する。
図8は、本実施形態に係る視点の一例を示す概念図である。
図8は、視点を☆印で示し、車両5、6の上面全体を示す。図8の左側が車両5、6の前方、図8の右側が車両5、6の後方、図8の上方が車両5、6の左側方、図8の下方が車両5、6の右側方を示す。即ち、車両6が車両5の左後方にあることを示す。
図8は、視点が車両5の右前方にあり、視点を起点とする太い実線の矢印は、基準点の方向を表す矢印である。
車両5のリアガラス上方を頂点とする一点破線で示された2つの三角形の領域は、撮像部121−3、122−3の水平方向の視野71−3、72−3を示す。車両5の左側面中央を頂点とする一点破線で示された扇形の領域は、撮像部121−2、122−2の水平方向の視野71−2、72−2を示す。
【0058】
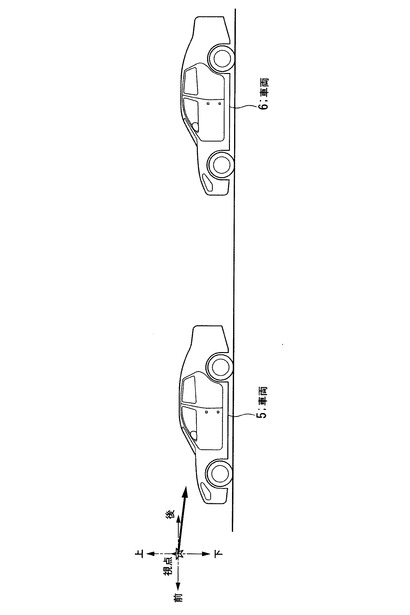
図9は、本実施形態に係る視点の一例を示すその他の概念図である。
図9は、視点を☆印で示し、車両5と車両6の左側面全体を示す。図9の左側が車両5、6の前方、図9の右側が車両5、6の後方、図9の上方が車両5、6の上方、図9の下方が車両5、6の下方を示す。即ち、車両6が車両5の後方にあることを示す。
図9は、視点が車両5の上前方にあり、視点を起点とする太い実線の矢印は基準点の方向を表す矢印である。
【0059】
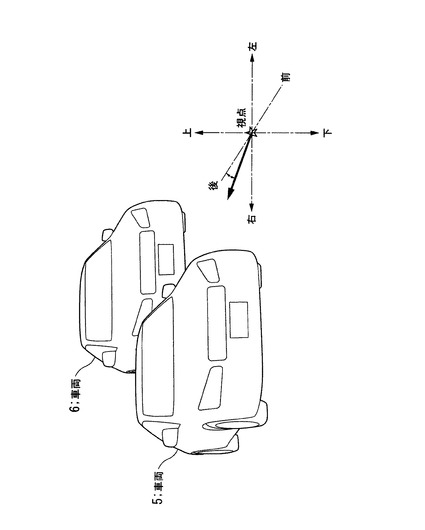
次に、合成撮影画像信号と基準画像信号から生成した表示用画像信号の一例について説明する。次に説明する例では、基準画像信号は車両5の前面の画像を表し、合成撮影画像信号は車両6の前面の画像を表す。但し、この例では干渉判定部137は、基準画像信号と合成撮影画像信号が干渉するか否かを判定していない。
図10は、表示用画像信号の一例を示す概念図である。
図10において、画像信号が被写体として車両5、6の前面を表す。☆印は、視点を表す。視点を起点とする太い実線の矢印は、基準点の方向を表す矢印である。左右方向に延び視点を通る一点破線は、車両5の左右方向を示す。左上方から右下方に延び視点を通る一点破線は、車両5の前後方向を示す。上下に延び視点を通る一点破線は、車両5の上下方向を示す。
太い実線の矢印と左上方から右下方に延び視点を通る一点破線を結ぶ両端が矢印の円弧は、視点からの基準点の方向が水平方向よりも左下方に向かうことを表す。
図10が示す合成撮影画像信号は、車両6の右前方の一部が車両5の一部に覆われること、つまり、基準画像信号と合成撮影画像信号が干渉していることを示す。
【0060】
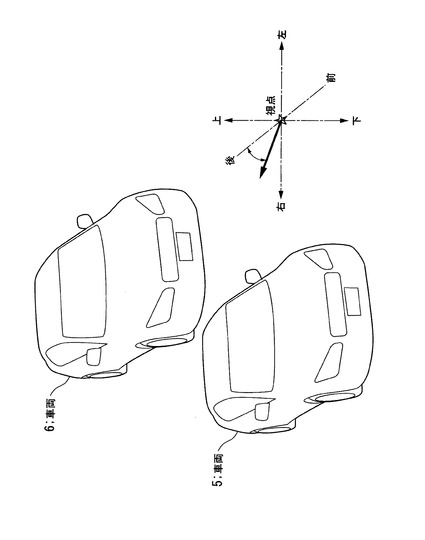
次に、合成撮影画像信号と基準画像信号から生成した表示用画像信号の他の例について説明する。基準画像信号と合成撮影画像信号が表す被写体の画像は、図10に示す例と同様である。但し、この例では干渉判定部137は、基準画像信号と合成撮影画像信号が干渉すると判定し、視点更新部138は視点が更に上方に移動するように視点情報を更新する。
図11は、表示用画像信号のその他の例を示す概念図である。
図11において、☆印は、視点を表し、視点を起点とする太い実線の矢印は、基準点の方向を表す矢印である。この例では、視点が上方に移動したため、視点からの基準点の相対的な位置が図10に示す例よりも下方を向いていることを表す。
図11が示す表示用画像信号は、車両6の画像と車両5の画像が互いに離間していること、つまり、基準画像信号と合成撮影画像信号が干渉していないことを示す。
【0061】
以上に説明したように、本実施形態では、撮影装置から入力された画像信号が表す被写体について当該被写体を視認する位置である視点からの座標情報を算出し、算出した座標情報に基づいて前記入力された画像信号を前記視点から前記被写体が視認される画像を表す合成撮影画像信号を生成し、生成した合成撮影画像信号と予め定めた被写体を表す基準画像信号とが干渉するか否かを判定し、前記合成撮影画像信号と前記基準画像信号が干渉すると判断した場合、前記視点を更新する。
これにより、周囲環境を表わす合成撮影画像信号が表す被写体が他の基準画像信号が表す被写体と離間して表示されるため、利用者はいずれの被写体も俯瞰できるようになり、被写体の位置関係を容易に把握することができる。
【0062】
(第2の実施形態)
次に、図面を参照しながら本発明の第2の実施形態について説明する。
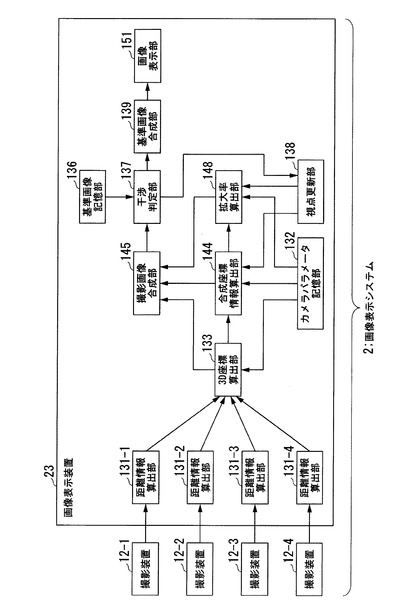
図12は、本実施形態に係る画像表示システム2の構成を示す概略図である。
画像表示システム2は、撮影装置12−1〜12−4、画像表示装置23を含んで構成される。
画像表示装置23は、距離情報算出部131−1〜131−4、カメラパラメータ記憶部132、3D座標算出部133、合成座標情報算出部144、撮影画像合成部145、基準画像記憶部136、干渉判定部137、視点更新部138、基準画像合成部139、拡大率算出部148及び画像表示部151を含んで構成される。
即ち、本実施形態では、画像表示装置23が、画像表示装置13の合成座標情報算出部134と撮影画像合成部135の代わりに、合成座標情報算出部144、撮影画像合成部145及び拡大率算出部148を備える点が、画像表示システム1の画像表示装置13と異なる。画像表示装置23のその他の構成部や各構成部の処理は、画像表示装置13と同様である。以下、第1の実施形態と異なる点を主に説明する。
【0063】
合成座標情報算出部144は、合成座標算出部134と同様な処理を行って合成座標情報を算出し、算出した合成座標情報を撮影画像合成部145に出力する。合成座標情報算出部144は、算出した合成座標情報が表す座標値(Xo,Yo,Zo)のうち奥行成分Zoを抽出し、抽出した奥行成分Zoを距離情報Lとして拡大率算出部148に出力する。この距離情報Lは、視点情報が表す視点から被写体の各座標までの距離を表す。
【0064】
撮影画像合成部145は、撮影画像合成部135と同様に合成座標情報算出部144から入力された合成座標情報に基づき、3D座標算出部133から入力された撮影装置毎の画像信号を前述の視点情報に対応する画像信号に変換する。
但し、撮影画像合成部145は、拡大率算出部148から入力された拡大率情報が表す拡大率Mに基づいて、入力された合成座標情報が表す座標値(Xo,Yo,Zo)をカメラ座標系における座標値(uo,vo)に、例えば式(6)を用いて変換する。
【0065】
【数6】
【0066】
式(6)は、式(5)で求められる座標値にさらに拡大率Mを乗じて座標値(uo,vo)を算出することを示す。即ち、被写体を表す画像が拡大率Mだけ拡大又は縮小されることを示す。
【0067】
拡大率算出部148は、合成座標情報算出部144から入力された距離情報に基づいて、上述の被写体の拡大率を算出する。拡大率算出部148は、算出した拡大率Mを表す拡大率情報を撮影画像合成部135に出力する。
【0068】
ここで、拡大率算出部148が行う処理についてより詳細に説明する。
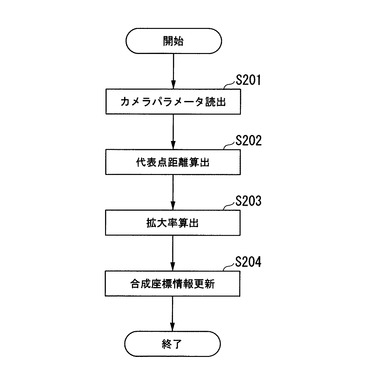
図13は、本実施形態に係る拡大率算出部の処理を表すフローチャートである。
(ステップS201)拡大率算出部148は、カメラパラメータ記憶部132からカメラパラメータ情報を読み出し、読み出したカメラパラメータ情報から撮影装置毎の位置情報を抽出する。その後、ステップS202に進む。
(ステップS202)拡大率算出部148は、視点更新部138から入力された視点情報を用いて視点から基準画像信号が表す被写体の代表点(例えば、車両5の前面中央部)までの距離L0を算出する。この代表点は、上述の基準点と同一であってもよい。その後、ステップS203に進む。
【0069】
(ステップS203)拡大率算出部148は、合成座標情報算出部144から入力された距離情報が表す距離Lが長くなるほど、小さくなるように、例えば式(7)を用いて拡大率Mを算出する。
【0070】
【数7】
【0071】
式(7)において、Kは予め定めた比例定数である。比例定数Kは、0よりも大きい実数、例えば1である。M0は予め定めた基準画像信号に対する拡大率である。M0は、0よりも大きい実数、例えば1である。その後、ステップS204に進む。
【0072】
(ステップS204)拡大率算出部148は、算出した拡大率Mを表す拡大率情報を撮影画像合成部145に出力する。その後、処理を終了する。
【0073】
このようにして、本実施形態では、撮影された画像信号が表す被写体の大きさを、視点からの距離に応じて拡縮することで、利用者に対する遠近感を調節することができる。
次に、式(7)を用いて拡大率Mを算出する原理について説明する。
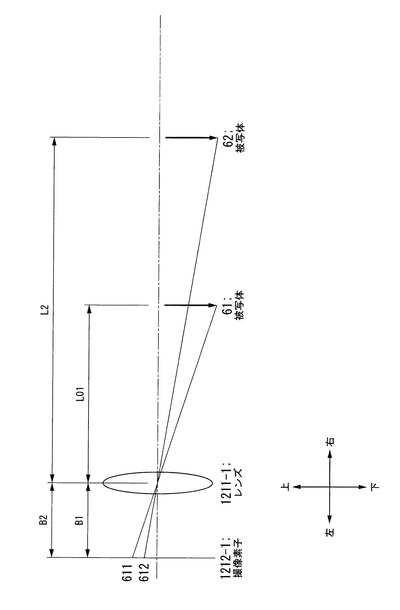
図14は、本実施形態に係る撮像部121−1等が備える光学系と被写体の位置関係の一例を示す概念図である。
図14は、左端から右側へ順に撮像素子1212−1、レンズ1211−1、被写体61、被写体62を示す。被写体62、61からレンズ1211−1の中心部を通り撮像素子1212−1に達する一点破線は、レンズ1211−1の光軸を示す。被写体61、62の上下方向の大きさは同等である。被写体61の下端からレンズ1211−1の中心部を通過する実線と撮像素子1212−1の交点611は、被写体61の下端を表す画像の位置を示す。被写体62の下端からレンズ1211−1の中心部を通過する実線と撮像素子1212−1の交点612は、被写体62の下端を表す画像の位置を示す。即ち、レンズ1211−1からの距離が長い被写体を表す画像ほど小さくなり、レンズ1211−1からの距離が短い被写体を表す画像ほど大きくなる。
【0074】
図14において、レンズ1211−1から被写体61の画像が結像する点までの距離はB1、レンズ1211−1から被写体62の画像が結像する点までの距離はB2、レンズ1211−1から被写体61までの距離はL1、レンズ1211−1から被写体62までの距離はL2である。これより、被写体61についての結像倍率m1は、B1/L1となり、B1=m1・L1という関係がある。被写体61についての結像倍率m2は、B2/L2となり、B2=m2・L2という関係がある。レンズ1211−1からの距離が一定値(約3m)以上の場合、経験的に距離は概ね一定値となり、B1、B2は概ね等しくなる。また、B1、B2は、焦点距離fと概ね等しくなる。距離L1から距離L2へ被写体を移動させた場合の拡大率Mは、結像倍率の比m2/m1で表されるから、拡大率Mは距離L2とL1の逆数比であるL1/L2となる。従って、拡大率算出部148は、式(7)に示されるように被写体の距離Lに反比例するように拡大率Mを算出することができる。
【0075】
なお、拡大率算出部148は、式(7)の代わりに式(8)を用いて拡大率Mを算出してもよい。
【0076】
【数8】
【0077】
式(8)において、Aは予め定めたべき乗係数を示す。Aは0よりも大きい実数(例えば、1.5)である。Aを1よりも大きい値にすることで実際の距離の変化よりも画像の大きさの変化を著しくすることができる。Aを1よりも小さい値にすることで実際の距離の変化よりも画像の大きさの変化を緩やかにすることができる。
【0078】
なお、式(7)、(8)において比例定数Kを変更することによって、画像の大きさを変化させることができる。Kを大きくするほど表される画像が大きくなり、Kを小さくするほど表される画像が小さくなる。
このように画像の大小を変化させることにより、利用者に対して注意を喚起する度合いを調節することができる。
【0079】
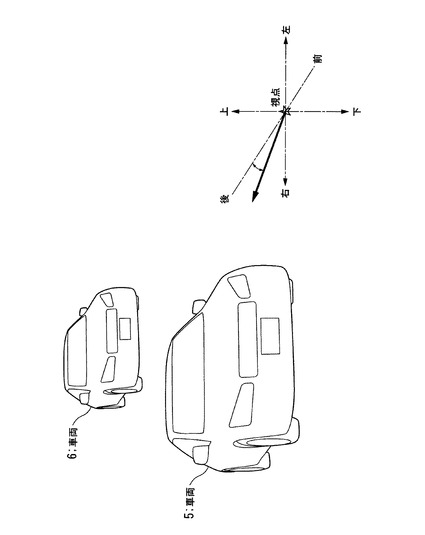
次に、本実施形態に係る画像表示装置23が生成した表示用画像信号の一例について説明する。基準画像信号と合成撮影画像信号が表す被写体の画像は、図10、11に示す例と同様である。但し、この例では、車両6の画像を表す合成撮影画像信号は、拡大率算出部148が算出した拡大率情報に基づいて縮小されるように合成されている。
図15は、表示用画像信号のその他の例を示す概念図である。
図15において、☆印は、視点を表し、視点を起点とする太い実線の矢印は、基準点の方向を示す矢印である。この矢印は図11に示す例ほど下方に向いていないことを表す。即ち、図10に示す視点の初期値からの変化が図11に示す視点よりも少ないことを示す。図15が示す合成撮影画像信号は、車両6の画像と車両5の画像が互いに離間していること、つまり、基準画像信号と合成撮影画像信号が干渉していないことを示す。
【0080】
以上に説明したように、本実施形態では、視点から、入力された画像信号が表す被写体までの距離に基づいて拡大率を算出し、画像信号が表す被写体を算出した拡大率で拡大又は縮小するように合成撮影画像信号を生成する。
これにより、視点を大きく変更しなくとも、基準画像信号と合成撮影画像信号が干渉しないように、合成撮像画像信号が表す画像を拡縮することができる。また、利用者は、合成撮影画像信号が表す被写体が視点からの距離感をもって俯瞰できるようになる。
【0081】
(第3の実施形態)
次に、本発明の第3の実施形態について説明する。
図16は、本実施形態に係る画像表示システム3の構成を示す概略図である。
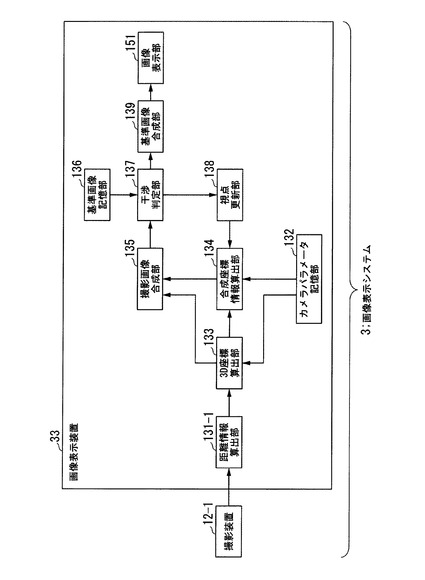
画像表示システム3は、撮影装置12−1、画像表示装置33を含んで構成される。
即ち、本実施形態に係る画像表示システム3は、図1に示す画像表示システム1において、撮影装置12−1及び距離情報算出部131−1を1個ずつ備え、撮影装置12−2〜12−4と距離情報算出部131−2〜131−4を省略して構成される。撮影画像合成部135は、変換した撮影装置毎の画像信号を合成して合成撮影画像信号を生成する処理を省略し、変換した画像信号を合成撮影画像信号として干渉判定部137に出力する。
本実施形態では撮影装置12−1を1個のみ備え、撮影される視野が限定される場合でも、撮影した画像信号と基準画像信号の被写体の画像が重複しないように表示用画像信号を生成することができる。
【0082】
(第4の実施形態)
次に、本発明の第4の実施形態について説明する。
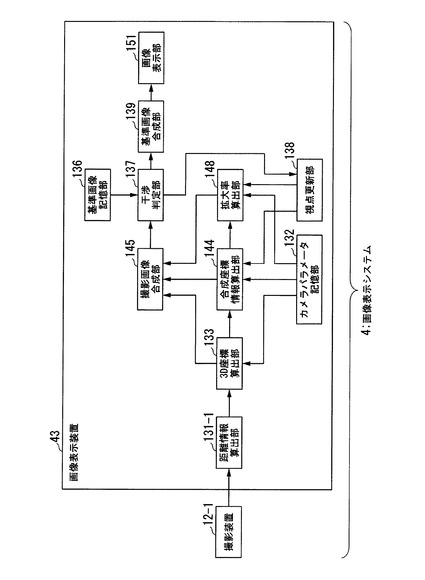
図17は、本実施形態に係る画像表示システム4の構成を示す概略図である。
本実施形態に係る画像表示システム4は、撮影装置12−1、画像表示装置43を含んで構成される。
即ち、本実施形態に係る画像表示システム4は、図12に示す画像表示システム2において、撮影装置12−1及び距離情報算出部131−1を1個ずつ備え、撮影装置12−2〜12−4と距離情報算出部131−2〜131−4を省略して構成される。撮影画像合成部145は、変換した撮影装置毎の画像信号を合成して合成撮影画像信号を生成する処理を省略し、変換した画像信号を合成撮影画像信号として干渉判定部137に出力する。
本実施形態では撮影装置12−1を1個のみ備え撮影される視野が限定される場合でも、撮影した画像信号と基準画像信号の被写体の画像が重複しないように表示用画像信号を生成することができる。
【0083】
上述の第2、4の実施形態は、合成座標情報算出部144から入力された距離情報に基づいて、被写体の拡大率を算出する拡大率算出部148を備え、撮影画像合成部145が算出した拡大率に基づいて被写体の画像を拡大又は縮小する例を示した。これらの実施形態では、拡大率算出部148の代わりに合成座標情報算出部144から入力された距離情報に基づいて、被写体の方位角を算出する角度算出部158(図示せず)を備え、撮影画像合成部145が算出した方位角に基づいて被写体の画像の方位を変更してもよい。
【0084】
なお、上述した実施形態において画像表示装置13、23、33又は43は、画像処理ECU(Electronic Control Unit、電子制御装置)部(図示せず)を備えてもよい。画像処理ECU部は、距離情報算出部131−1等又は合成座標情報算出部144から被写体の距離情報を逐次に入力され、被写体までの距離の計時変化に基づいて被写体との相対速度や被写体が自車両に到達するまでの時間(衝突時間)を算出してもよい。画像処理ECU部は、算出した時間が予め定めた閾値よりも小さい場合に、当該被写体に接触又は衝突する危険が高いと判断する。このとき、画像処理ECU部は、運転者に注意を喚起する情報を示す音声や画像を提示する。又は、画像処理ECU部は、車両の動作機構(例えば、アクセル、ブレーキ、ステアリング等)に接触又は衝突を回避するための制御信号を出力してもよい。
【0085】
上述した実施形態について、画像表示システム1、2、3又は4は、撮影装置12−1等、距離情報算出部131−1等を、各1個又は各4個備える構成について説明したが、本実施形態ではこれには限られない。本実施形態では、任意の個数の撮影装置12−1等及び距離情報算出部131−1等を備えていてもよい。
【0086】
上述した実施形態において、基準画像記憶部136は、予め視点情報と対応付けて基準画像信号を記憶させておき、干渉判定部137は入力された視点情報に対応する基準画像信号を読み出す構成について説明したが、本実施形態ではこれには限られない。本実施形態では、基準画像記憶部136は、予め定めた単一の視点情報に対応する基準画像情報を記憶させておき、干渉判定部137は、記憶された基準画像情報を座標変換して入力された視点情報に対応する基準画像信号を生成してもよい。
【0087】
上述した実施形態について、撮影画像合成部135又は145が合成した合成撮影画像信号に対して干渉判定部137が干渉するか否かの判定、視点更新部138が視点情報の更新、拡大率算出部148が拡大率の算出を一括して行う構成について説明した。本実施形態ではこれには限られない。本実施形態では、合成撮影画像信号が表す被写体の画像信号毎に、これらの機能部が各々の処理を行ってもよい。そのために撮影画像合成部135、145は、合成撮影画像信号に対して、例えばエッジ抽出を行って、被写体毎に表示される領域の画像信号を識別する被写体情報を生成する。この被写体情報を用いて各構成部が、被写体毎の画像信号を識別できるようにしてもよい。
【0088】
上述の実施形態について、距離情報算出部131−1等は、撮影装置12−1等から入力された画像信号間の視差に基づいて当該画像信号が表す全ての被写体の距離情報を算出することを前提としていたが、本実施形態ではこれには限られない。本実施形態では、当該画像信号が表す被写体のうち、少なくとも一部の被写体までの距離情報を別途の距離情報取得部(例えば、測距センサ、図示せず)が取得するようにしてもよい。その場合、3D座標算出部133は当該距離情報取得部から入力された当該被写体の距離情報を、当該被写体を表す画像信号に係る3次元座標情報の算出に用いてもよい。
【0089】
上述の実施形態について、視点更新部138は、干渉判定部137が判定した合成撮影画像信号と基準画像信号が干渉する領域の面積が、さらに減少するように視点情報を更新してもよい。ここで、視点更新部138は、今回の視点情報に基づいて算出された干渉する領域の面積が、前記の視点情報に基づいて算出された干渉する領域の面積よりも増加した場合、今回視点情報を更新する更新量の正負を、前回から今回の更新量とは逆転させる。これにより、合成撮影画像信号と基準画像信号が干渉しても、干渉する領域の面積が減少させ、各被写体の画像が離間するように視点情報を定めることができる。
【0090】
上述の実施形態において、基準画像合成部139は、干渉判定部137から入力された合成撮影画像信号と基準画像信号のいずれか一方が、他方の画像よりも強調されるように合成して、表示用画像信号を生成するようにしてもよい。例えば、基準画像合成部139は、合成撮影画像信号が表す被写体の画像の輝度を予め設定した輝度値だけ増加させてもよいし、他の部分の画像の輝度を予め設定した輝度値だけ減少させてもよい。基準画像合成部139は、その被写体の画像の特定の色成分(例えば、赤色R)の輝度値と、他の部分の画像の当該色成分の輝度値の差分が、予め設定した値よりも大きくなるように当該色成分値を変更してもよい。これにより、運転者は周囲環境を示す合成撮影画像信号と、必ずしも周囲環境を示さない基準画像信号を容易に識別することができる。
【0091】
なお、上述した実施形態における画像表示装置13、23、33又は43の一部、例えば、距離情報算出部131−1等、3D座標算出部133、合成座標情報算出部134もしくは144、撮影画像合成部135もしくは145、干渉判定部137、視点更新部138、基準画像合成部139及び拡大率算出部148をコンピュータで実現するようにしても良い。その場合、この制御機能を実現するためのプログラムをコンピュータ読み取り可能な記録媒体に記録して、この記録媒体に記録されたプログラムをコンピュータシステムに読み込ませ、実行することによって実現しても良い。なお、ここでいう「コンピュータシステム」とは、画像表示装置13、23、33及び43に内蔵されたコンピュータシステムであって、OSや周辺機器等のハードウェアを含むものとする。また、「コンピュータ読み取り可能な記録媒体」とは、フレキシブルディスク、光磁気ディスク、ROM、CD−ROM等の可搬媒体、コンピュータシステムに内蔵されるハードディスク等の記憶装置のことをいう。さらに「コンピュータ読み取り可能な記録媒体」とは、インターネット等のネットワークや電話回線等の通信回線を介してプログラムを送信する場合の通信線のように、短時間、動的にプログラムを保持するもの、その場合のサーバやクライアントとなるコンピュータシステム内部の揮発性メモリのように、一定時間プログラムを保持しているものも含んでも良い。また上記プログラムは、前述した機能の一部を実現するためのものであっても良く、さらに前述した機能をコンピュータシステムにすでに記録されているプログラムとの組み合わせで実現できるものであっても良い。
また、上述した実施形態における画像表示装置13、23、33及び43の一部、または全部を、LSI(Large Scale Integration)等の集積回路として実現しても良い。画像表示装置2の各機能ブロックは個別にプロセッサ化してもよいし、一部、または全部を集積してプロセッサ化しても良い。また、集積回路化の手法はLSIに限らず専用回路、または汎用プロセッサで実現しても良い。また、半導体技術の進歩によりLSIに代替する集積回路化の技術が出現した場合、当該技術による集積回路を用いても良い。
【0092】
以上、図面を参照してこの発明の一実施形態について詳しく説明してきたが、具体的な構成は上述のものに限られることはなく、この発明の要旨を逸脱しない範囲内において様々な設計変更等をすることが可能である。
【符号の説明】
【0093】
1、2、3、4…画像表示システム、12−1〜12−4…撮影装置、
121−1〜121−4、122−1〜122−4…撮像部、
1211−1〜1211−4…レンズ、1222−1〜1222−4…撮像素子、
13、23、33、43…画像表示装置、
131−1〜131−4…距離情報算出部、132…カメラパラメータ記憶部、
133…3D座標算出部、134、144…合成座標情報算出部、
135、145…撮影画像合成部、136…基準画像記憶部、137…干渉判定部、
138…視点更新部、139…基準画像合成部、148…拡大率算出部、
151…画像表示部
【技術分野】
【0001】
本発明は、画像表示装置、画像表示システム、画像表示方法、及び画像表示プログラムに関する。
【背景技術】
【0002】
近年、車両に取付ける撮影装置(例えば、カメラ)等の周囲監視装置が開発されている。周囲監視装置には、複数の撮影装置が撮影した画像の視点方向をそれぞれ変換して合成する技術が提案されている。
例えば、特許文献1、2に記載の発明は、自車両の後方を撮影するリアカメラと、左側後方を撮影するレフトサイドカメラと、右側後方を撮影するライトサイドカメラの3つのカメラで撮影した画像信号を画像記憶部に記憶し、その画像を注視する位置である視点を自車両の真上に変換した画像信号を生成する。当該発明は、生成した画像信号と自車両の画像を表す画像信号とを合成して、俯瞰画像を表す画像信号を生成する。これにより、自車両を表す画像とともに他の被写体を表す画像を表示する俯瞰画像を生成することができ、運転者が自車両の周囲にある被写体の位置を直感的に把握できる。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2011−35816号公報
【特許文献2】特開2007−158426号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、特許文献1、2に記載の発明では、他の被写体の画像を表す画像信号と自車両の画像を表す画像信号を合成する際、他の被写体の画像の一部が自車両の一部に覆われることがある。そのため、生成した俯瞰画像では他の被写体の位置が運転者に把握しにくいという課題があった。
本発明はこのような課題に鑑みてなされたもので、被写体の位置関係を容易に把握できる画像表示装置、画像表示システム、画像表示方法又は画像表示プログラムを提供することを目的とする。
【課題を解決するための手段】
【0005】
(1)本発明は上記の課題を解決するためになされたものであり、本発明の一態様は、画像信号が表す被写体の座標情報を算出する座標情報算出部と、前記座標情報算出部が算出した座標情報に基づいて前記入力された画像信号をある視点からの画像を表す合成撮影画像信号を生成する撮影画像合成部と、前記撮影画像合成部が生成した合成撮影画像信号と予め定めた被写体を表す基準画像信号とが干渉するか否かを判定する干渉判定部と、前記干渉判定部が前記合成撮影画像信号と前記基準画像信号が干渉すると判定した場合、前記視点を更新する視点更新部とを備えることを特徴とする画像表示装置である。
【0006】
(2)本発明のその他の態様は、前記画像表示装置において、前記座標情報算出部は、前記視点として前記視点更新部が更新した視点情報が表す視点を用いて前記座標情報を算出することを特徴とする。
【0007】
(3)本発明のその他の態様は、前記視点から前記画像信号が表す被写体までの距離に基づいて拡大率を算出する拡大率算出部を備え、前記撮影画像合成部は、前記画像信号が表す被写体を前記拡大率算出部が算出した拡大率で拡大又は縮小するように前記合成撮影画像信号を生成することを特徴とする。
【0008】
(4)本発明のその他の態様は、前記画像表示装置において、前記干渉判定部は、前記合成撮影画像信号が表す被写体を表示する座標と前記基準画像信号が表す被写体の画像を表示する座標が重複するか否かにより、前記合成撮影画像信号と前記基準画像信号が干渉するか否かを判断することを特徴とする。
【0009】
(5)本発明のその他の態様は、画像を撮影する撮影装置と画像表示装置を備え、前記画像表示装置は、前記撮影装置から入力された画像信号が表す被写体の座標情報を算出する座標情報算出部と、前記座標情報算出部が算出した座標情報に基づいて前記入力された画像信号をある視点からの画像を表す合成撮影画像信号を生成する撮影画像合成部と、前記撮影画像合成部が生成した合成撮影画像信号と予め定めた被写体を表す基準画像信号とが干渉するか否かを判定する干渉判定部と、前記干渉判定部が前記合成撮影画像信号と前記基準画像信号が干渉すると判定した場合、前記視点を更新する視点更新部と、を備えることを特徴とする画像表示システムである。
【0010】
(6)本発明のその他の態様は、前記画像表示システムにおいて、前記撮影装置として複数個の撮影装置を互いに異なる位置に備え、前記撮影画像合成部は、前記複数個の撮影装置の各々から入力された画像信号に基づいて前記合成撮影画像信号を生成することを特徴とする。
【0011】
(7)本発明のその他の態様は、画像表示装置における画像表示方法において、前記画像表示装置が、画像信号が表す被写体の座標情報を算出する過程と、前記画像表示装置が、前記算出した座標情報に基づいて前記入力された画像信号をある視点からの画像を表す合成撮影画像信号を生成する過程と、前記画像表示装置が、前記生成した合成撮影画像信号と予め定めた被写体を表す基準画像信号とが干渉するか否かを判定する過程と、前記画像表示装置が、前記合成撮影画像信号と前記基準画像信号が干渉すると判定した場合、前記視点を更新する過程とを有することを特徴とする画像表示方法である。
【0012】
(8)本発明のその他の態様は、画像表示装置のコンピュータに、画像信号が表す被写体の座標情報を算出する手順、前記座標情報算出部が算出した座標情報に基づいて前記入力された画像信号をある視点からの画像を表す合成撮影画像信号を生成する手順、前記撮影画像合成部が生成した合成撮影画像信号と予め定めた被写体を表す基準画像信号とが干渉するか否かを判定する手順、前記干渉判定部が前記合成撮影画像信号と前記基準画像信号が干渉すると判定した場合、前記視点を更新する手順を実行させるための画像表示プログラムである。
【発明の効果】
【0013】
本発明によれば、被写体の位置関係を容易に把握することができる。
【図面の簡単な説明】
【0014】
【図1】本発明の第1の実施形態に係る画像表示システムの構成を示す概略図である。
【図2】本実施形態に係る撮影装置の構成を示す概略図である。
【図3】本実施形態に係る画像表示処理を表すフローチャートである。
【図4】本実施形態に係る撮影装置の配置の一例を示す概念図である。
【図5】本実施形態に係る撮影装置の配置の一例を示すその他の概念図である。
【図6】本実施形態に係る撮影装置の配置の一例を示すその他の概念図である。
【図7】本実施形態に係る撮像部が撮影した画像の一例を表す図である。
【図8】本実施形態に係る視点の一例を示す概念図である。
【図9】本実施形態に係る視点の一例を示すその他の概念図である。
【図10】表示用画像信号の一例を示す概念図である。
【図11】表示用画像信号のその他の例を表す概念図である。
【図12】本発明の第2の実施形態に係る画像表示システムの構成を示す概略図である。
【図13】本実施形態に係る拡大率算出部の処理を表すフローチャートである。
【図14】本実施形態に係る撮像部が備える光学系と被写体の位置関係の一例を示す概念図である。
【図15】表示用画像信号のその他の例を示す概念図である。
【図16】本発明の第3の実施形態に係る画像表示システムの構成を示す概略図である。
【図17】本発明の第4の実施形態に係る画像表示システムの構成を示す概略図である。
【発明を実施するための形態】
【0015】
(第1の実施形態)
以下、図面を参照しながら本発明の第1の実施形態について説明する。
図1は、本実施形態に係る画像表示システム1の構成を示す概略図である。
画像表示システム1は、撮影装置12−1〜12−4、画像表示装置13を含んで構成される。以下、撮影装置12−1〜12−4を総括する場合や、互いに区別する必要がない場合には撮影装置12−1等、又は撮影装置12と呼ぶ。撮影装置12−1等の配置については後述する。
【0016】
撮影装置12−1等は、撮影した画像を表す画像信号を画像表示装置13の距離情報算出部131−1等に出力する。
ここで、撮影装置12−1の構成例について説明する。撮影装置12−2〜12−4の構成は、例えば、撮影装置12−1とそれぞれ同様である。
図2は、本実施形態に係る撮影装置12−1の構成を示す概略図である。
撮影装置12−1は、2個の撮影部121−1、122−1を備える、いわゆる2眼カメラである。撮影部121−1は、レンズ1211−1と撮像素子1212−1を含んで構成され、撮影部122−1は、レンズ1221−1と撮像素子1222−1を含んで構成される、レンズ1211−1、1222−1は、被写体からの光線を透過し、撮像素子1212−1、1222−1の表面に結像させる。撮像素子1212−1、1222−1は、表面に結像した光線を画像信号に変換し、変換した画像信号を画像表示装置13の距離情報算出部131−1に出力する。
【0017】
図1に戻り、画像表示装置13は、距離情報算出部131−1〜131−4、カメラパラメータ記憶部132、3D座標算出部133、合成座標情報算出部134、撮影画像合成部135、基準画像記憶部136、干渉判定部137、視点更新部138、基準画像合成部139及び画像表示部151を含んで構成される。
【0018】
距離情報算出部131−1等は、それぞれ撮像部121−1等、122−1等から入力された共通する被写体を表す画像信号間座標値の差である視差情報(視差マップ)を生成する。視差マップを生成する処理については後述する。また、視差情報は、後述するように被写体までの距離を表す情報である。距離情報算出部131−1等は、算出した視差情報を距離情報に変換して3D座標算出部133に出力する。また、距離情報算出部131−1等は、入力された画像信号を3D座標情報算出部133に出力する。
【0019】
カメラパラメータ記憶部132には、撮影装置12−1等による画像の撮影に係るパラメータ群を表すカメラパラメータ情報が予め記憶されている。カメラパラメータ情報は、例えば、撮影装置12−1等の位置情報、光軸方向情報、焦点距離情報、基線長情報、画素ピッチ情報を含む。ここで、位置情報とは、撮影装置12−1等が、設置される位置を表す情報である。光軸方向情報とは、レンズ1211−1等、レンズ1221−1の光軸の方向を表す情報である。焦点距離情報とは、レンズ1211−1等の中心部からレンズ1211−1等までの焦点までの距離である焦点距離を表す情報である。基線長情報とは、並列するレンズ1211−1等の中心部とレンズ1211−2等の中心部を結ぶ線分である基線の長さ、即ち、撮像部121−1等と撮影部122−1等の間隔を表す情報である。画素ピッチ情報とは、撮像素子1212−1等の画素間間隔を表す情報である。
【0020】
3D座標算出部133は、距離情報算出部131−1等から入力された距離情報ならびに画像信号と、カメラパラメータ記憶部132から読み出したカメラパラメータ情報に基づいて、被写体毎のカメラ座標系で表した3次元座標情報を算出する。3D座標算出部133が3次元座標情報を算出する処理については後述する。
3D座標算出部133は、算出した3次元座標情報を合成座標情報算出部134及び撮影画像合成部135に出力する。3D座標算出部133は、距離情報算出部131−1等から入力された画像信号を撮影画像合成部135に出力する。
【0021】
合成座標情報算出部134は、カメラパラメータ記憶部132から読み出したカメラパラメータ情報に基づき、3D座標算出部133から入力された3次元座標情報から、視点情報が表す視点を基準とした座標値を表す合成座標情報を算出する。合成座標情報算出部134が、視点更新部138から視点情報が入力される場合には、入力された視点情報を基準とした座標値を表す合成座標情報を算出する。
視点情報とは、被写体を視認する位置である視点を表す情報である。例えば、撮影装置12−1等から入力された画像信号の視点は、各撮影装置の設置位置である。視点は、必ずしも撮影装置の設置位置である必要はなく、仮想的な位置であってもよい。合成座標情報算出部134における視点情報の初期値は、ある基準点(原点)から予め定めた位置、例えば画像表示システム1を搭載する自車両の先頭部中心をその基準点とし、その基準点から前方に10m、上方に2m、離れた位置である。合成座標情報算出部134が合成座標情報を算出する処理については後述する。
合成座標情報算出部134は、算出した合成座標情報とその合成座標情報を算出するために用いた視点情報を撮影画像合成部135に出力する。
ここで、算出された合成座標情報が表す座標値は、撮影装置12−1等に関わらず全ての撮影領域に共通な座標系(世界座標系)による座標値である。
【0022】
撮影画像合成部135は、合成座標情報算出部134から入力された視点情報と合成座標情報に基づき、3D座標算出部133から入力された撮影装置毎の画像信号を入力された視点情報に対応する画像信号に変換する。これにより、撮影画像合成部135は、視点情報が示す共通の視点から視認される画像を表す視点画像信号を生成する。撮影画像合成部135が、視点画像信号に変換する処理については後述する。
【0023】
撮影画像合成部135は、変換した撮影装置毎の視点画像信号を合成して合成撮影画像信号を生成する。複数の画像信号間で共通する被写体を表す部分の画素値を一意に定めるため、撮影画像合成部135は、例えばOR描画処理を行って、合成撮影画像信号を生成する。OR描画処理では、対象となる複数の画像信号間で各1個の座標の画素しかない場合には、その座標の画素値をそのまま採用する。他方、その複数の画像信号間で共通する座標の画素が複数個存在する場合、複数個のうち輝度値が最大となる画素値を、その座標の画素値として選択する。
撮影画像合成部135は、生成した合成撮影画像信号と合成座標情報算出部134から入力された視点情報を干渉判定部137に出力する。
【0024】
基準画像記憶部136には、予め定めた被写体(例えば、画像表示システム1を搭載する自車両)を表す画像信号が基準画像信号として記憶されている。基準画像記憶部136に、異なる視点毎の被写体を表す基準画像信号と視点情報とを対応付けて記憶させておくことは、その具体的な実施の一例である。
干渉判定部137は、撮影画像合成部135から入力された視点情報に対応する基準画像信号を基準画像記憶部136から読み出す。干渉判定部137は、撮影画像合成部135から入力された合成撮影画像信号と、基準画像記憶部136から読み出した基準画像信号とが干渉するか否かを判定する。複数の画像信号が干渉するとは、各画像信号が含む座標のうち画像信号間で共通する座標の画素値があることを指す。
干渉判定部137は、合成撮影画像信号と基準画像信号が干渉しないと判定した場合、入力された合成撮影画像信号と読み出した基準画像信号を基準画像合成部139に出力する。
干渉判定部137は、合成撮影画像信号と基準画像信号が干渉すると判定した場合、干渉することを示す干渉判定信号を、視点更新部138に出力する。
【0025】
視点更新部138は、干渉判定部137から干渉判定信号が入力された場合、視点情報を更新し、更新した視点情報を合成座標情報算出部134に出力する。
視点更新部138は、例えば、上述の基準点を通過する水平方向又は垂直方向の座標軸との方位角が予め設定された微小量(例えば、0.1〜1度)ずつ変化するように視点情報を更新してもよい。また、視点更新部138は、原点からの距離が予め設定された微小量(例えば、0.01〜0.2m)ずつ増加するように視点情報を更新してもよいし、これらの任意の組み合わせであってもよい。視点更新部138は、このようにして被写体全体を俯瞰できる位置に視点情報を更新する。
【0026】
基準画像合成部139は、干渉判定部137から入力された合成撮影画像信号と基準画像信号について、例えば、OR描画処理を行うことにより合成して表示用画像信号を生成する。基準画像合成部139は、合成した表示用画像信号を画像表示部151に出力する。
画像表示部151は、基準画像合成部139から入力された表示用画像信号が表す画像を表示する。画像表示部151は、例えばディスプレイユニットである。
【0027】
次に、画像表示装置13が行う画像表示処理について説明する。
図3は、本実施形態に係る画像表示処理を表すフローチャートである。
(ステップS101)距離情報算出部131−1等は、撮像部121−1等、122−1等から入力された画像信号に基づいて距離情報を生成し、生成した距離情報を3D座標情報算出部133に出力する。距離情報算出部131−1等は、入力された画像信号を3D座標情報算出部133に出力する。その後、ステップS102に進む。
(ステップS102)3D座標算出部133は、距離情報算出部131−1等から入力された距離情報と、カメラパラメータ記憶部132から読み出したカメラパラメータ情報に基づいて、3次元座標情報を算出する。3D座標算出部133は、算出した3次元座標情報を合成座標情報算出部134及び撮影画像合成部135に出力する。3D座標算出部133は、距離情報算出部131−1等から入力された画像信号を撮影画像合成部135に出力する。その後、ステップS103に進む。
【0028】
(ステップS103)合成座標情報算出部134は、カメラパラメータ記憶部132から読み出したカメラパラメータ情報に基づき、3D座標算出部133から入力された3次元座標情報から、視点情報が表す視点を基準とした座標値を表す合成座標情報を算出する。視点更新部138から視点情報が入力される場合には、合成座標情報算出部134は、入力された視点情報を用いて合成座標情報を算出する。合成座標情報算出部134は、算出した合成座標情報とその合成座標情報を算出するために用いた視点情報を撮影画像合成部135に出力する。その後、ステップS104に進む。
【0029】
(ステップS104)撮影画像合成部135は、合成座標情報算出部134から入力された合成座標情報に基づき、3D座標算出部133から入力された撮影装置毎の画像信号を、合成座標情報算出部134から入力された視点情報に対応する視点画像信号に変換する。
撮影画像合成部135は、変換した撮影装置毎の視点画像信号を合成して合成撮影画像信号を生成する。撮影画像合成部135は、生成した合成撮影画像信号と変換を行う際に用いた視点情報を干渉判定部137に出力する。その後、ステップS105に出力する。
【0030】
(ステップS105)干渉判定部137は、撮影画像合成部135から入力された視点情報に対応する基準画像信号を基準画像記憶部136から読み出す。干渉判定部137は、撮影画像合成部135から入力された合成撮影画像信号と、基準画像記憶部136から読み出した基準画像信号とが干渉するか否かを判定する。
干渉判定部137は、入力された合成撮影画像信号と、読み出した基準画像信号とが干渉すると判定した場合(ステップS105 Y)、ステップS106に進む。干渉判定部137は、入力された合成撮影画像信号と、読み出した基準画像信号とが干渉しないと判定した場合(ステップS105 N)、入力された合成撮影画像信号と読み出した基準画像信号を基準画像合成部139に出力し、ステップS107に進む。
【0031】
(ステップS106)視点更新部138は、視点情報を更新し、更新した視点情報を合成座標情報算出部134に出力する。その後、ステップS103に進む。
(ステップS107)基準画像合成部139は、干渉判定部137から入力された合成撮影画像信号と基準画像信号を合成して、表示用画像信号を生成する。基準画像合成部139は、合成した表示用画像信号を画像表示部151に出力する。その後、ステップS108に進む。
(ステップS108)画像表示部151は、基準画像合成部139から入力された表示用画像信号が表す画像を表示する。その後、処理を終了する。
【0032】
次に、撮影装置12−1等の配置の一例について図面を用いて説明する。
図4は、本実施形態に係る撮影装置12−1〜12−4の配置の一例を示す概念図である。
図4は、車両5の上面全体を示す。車両5は、画像表示システム1を搭載する自車両である。図4において、左側が車両5の前方、右側が車両5の後方、上方が車両5の右側方、下方が車両5の左側方である。
図4は、撮影装置12−1等の設置位置を破線の四角で示す。撮像部121−1等の設置位置を□印で示す。撮像部121−1、122−1、121−3及び122−3に接する頂点をもつ一点鎖線で示される三角形の領域71−1、72−1、71−3及び72−3は、撮像部121−1、122−1、121−3及び122−3の視野をそれぞれ示す。撮像部121−2及び121−4に接する頂点をもつ一点鎖線で示される扇形の領域71−2及び72−4は、撮像部121−2及び121−4等の視野をそれぞれ示す。
撮像部121−2及び121−4に接する頂点をもつ一点鎖線で示される扇形の領域71−2及び72−4は、撮像部121−2及び121−4等の視野をそれぞれ示す。
このように本実施形態では、複数の撮影装置12−1等を備え、撮影した画像信号を合成するため、広範囲にわたる周囲情報を取得することができる。
【0033】
撮影装置12−1が取り付けられる位置は、車両5のフロントガラス上方の中心部である。撮像部121−1と撮像部122−1は、車両5の左右方向に並列されている。撮影装置12−2が取り付けられる位置は、車両5の左側面の中心部である。撮像部121−2は、撮像部122−2の直上となるように垂直方向に並列されている。撮影装置12−3が取り付けられる位置は、車両5のリヤガラス上方の中心部である。撮像部121−3と撮像部122−3は、車両5の左右方向に並列されている。撮影装置12−4が取り付けられる位置は、車両5の右側面の中心部である。撮像部121−4は、撮像部122−4の直上となるように垂直方向に並列されている。
【0034】
撮像部121−1〜122−4の光軸の方向は、いずれも水平面に平行な方向である。但し、撮像部121−1、122−1の光軸の方向は、いずれも車両5の前方である。撮像部121−2、122−2の光軸の方向は、車両5の左側方である。撮像部121−3、122−3の光軸の方向は、車両5の後方である。撮像部121−4、122−4の光軸の方向は、車両5の右側方である。
【0035】
図4において、撮像部121−1、122−1の水平方向の視野71−1、72−1は、車両5の前方を中心に運転者の視野を網羅する角度、例えば60°である。
撮像部121−2の水平方向の視野71−2は、車両5の左側方を中心として180°に近い十分大きい角度、例えば160°であり、車両5の左前方10°から左真横を経て左後方10°に至る。撮像部122−2の水平方向の視野は、撮像部121−2と同様である。
撮像部121−3、122−3の水平方向の視野71−3、72−3は、車両5の後方を中心に後進時に運転者の視野を網羅する角度、例えば60°である。
撮像部121−4の水平方向の視野71−4は、車両5の右側方を中心として180°に近い十分大きい角度、例えば160°であり、車両5の右前方10°から右真横を経て右後方10°に至る。撮像部122−4の水平方向の視野は、撮像部121−4と同様である。
【0036】
図5は、本実施形態に係る撮影装置12−1〜12−3の配置の一例を示すその他の概念図である。
図5は、車両5の前面全体を示す。図5において、左側が車両5の右側方、左側が車両5の左側方、上方が車両5の上方、下方が車両5の下方である。
図5は、撮影装置12−1〜12−3が前述の位置に設置されていることを示す。
【0037】
図6は、本実施形態に係る撮影装置12−2の配置の一例を示すその他の概念図である。
図6は、車両5の左側面全体を示す。図6において、左側が車両5の前方、右側が車両5の後方、上方が車両5の上方、下方が車両5の下方である。
図6は、撮影装置12−2が前述の位置に設置されていることを示す。
図6において、撮像部121−2の左右に広がる一点鎖線で示す三角形の領域71−2は、撮像部121−2の上下方向の視野を表す。撮像部122−2の左右に広がる一点鎖線で示す三角形の領域72−2は、撮像部122−2の上下方向の視野を表す。三角形の領域71−2、72−2が重なる塗りつぶし部分712−2は、撮像部121−2、122−2の視野が重複する領域である。従って、撮像部121−2、122−2は、この領域に位置する被写体を表す画像をともに撮影することができ、共通する被写体を表す画像が後述する距離情報の算出に用いられる。
【0038】
続いて、距離情報算出部131−1等が行う処理についてより具体的に説明する。
距離情報算出部131−1等は、撮影装置12−1等の撮像部121−1、122−1から各々入力された画像信号に基づいて撮像部121−1、122−1間における視差情報を画素毎に算出する。視差とは、異なる撮影装置から入力された画像信号が表す共通の被写体を表す画素位置の差分である。距離情報算出部131−1等は、算出した視差情報を距離情報として3D座標算出部133に出力する。距離情報算出部131−1等は、撮影装置12−1等の撮像部121−1等及び122−1等から入力された画像信号のうち何れか一方、例えば撮像部121−1等からの画像信号を3D座標算出部133に出力する。
【0039】
視差情報を算出するために、距離情報算出部131−1等は、例えばブロックマッチング(block matching)を行う。ブロックマッチングにおいて、距離情報算出部131−1等は一方の画像信号の一部である画像ブロックと他方の画像信号の一部である画像ブロックの画素値の類似性を表す評価値を算出し、最も類似することを表す評価値が算出される画像ブロックを他方の画像信号から探索する。評価値は、例えば、差分絶対和(SAD、Sum of Absolute Difference)である。距離情報算出部131−1等は、両画像信号が共通に表す被写体の対応する部位間の視差を算出する。
【0040】
ここで、撮像部121−2、122−2が撮影した画像の一例について述べる。
図7は、本実施形態に係る撮像部121−2、122−2が撮影した画像の一例を表す図である。
図7(a)は、撮像部121−2が撮影した画像81−2を表す。画像81−2は被写体として他の車両を表す画像である。図7(b)は、撮像部122−2が撮影した画像82−2を表す。画像82−2は被写体として画像81−2が表す車両と共通する車両を表す。画像82−2に表される車両の位置は、画像81−2よりも垂直方向の正方向(上方)にずれている。これは、画像82−2を撮影した撮像部122−2が画像81−2を撮影した撮像部121−2よりも垂直方向の負方向(下方)に離れた位置に設置されているためである。
【0041】
図7(a)、(b)はともに、画像81−2の画像ブロックと画像82−2において同一の被写体である車両を表す画像ブロックを表す。画像81−2が表す車両のナンバープレートの中央部の水平方向の座標はH、垂直方向の座標はV1である。この部位に対応する、画像82−2の水平方向の座標はH、垂直方向の座標はV2である。画像81−2、82−2間の垂直方向の座標の差分V1−V2が視差である。
上述のように、視差は、撮影装置12−2から被写体までの距離Zを表す。視差V1−V2と距離Zとの間には、例えば式(1)に示す関係がある。
【0042】
【数1】
【0043】
式(1)において、fは、撮像部121−2、122−2の焦点距離、Bは基線長、pは画素ピッチを表す。視差は、撮影装置から被写体までの距離によって異なる値をとる。視差は、例えば、被写体が無限遠にあるとき0であり、撮影装置から被写体までの距離が短くなるほど大きくなる。
【0044】
次に、3D座標算出部133が3次元座標情報を算出する処理についてより具体的に説明する。
3D座標算出部133は、距離情報算出部131−1等から画像信号と、距離情報として視差情報を入力される。3D座標算出部133は、カメラパラメータ記憶部132からカメラパラメータ情報として、撮影装置12−1等の焦点距離情報、基線長情報及び画素ピッチ情報を読み出す。
【0045】
3D座標算出部133は、入力された画像信号における画素(i,j)の座標(ui,vj)を、例えば式(2)を用いてレンズ1211−1等を原点とするカメラ座標系による3次元座標情報(Xa,Ya,Za)に変換する。ここで、座標(ui,vj)は、レンズ1211−1等を原点とする画像座標系による座標情報である。
【0046】
【数2】
【0047】
式(2)において、D(i,j)は、画素(i,j)における視差を表す。即ち、式(2)における、水平方向の座標値Xa、垂直方向の座標値Ya、奥行方向の座標値Zaは、それぞれ撮像素子1212−1等における画素(i,j)の水平方向の座標値ui、垂直方向の座標値vj又は奥行方向の座標fに、それぞれ基線長Bを乗じた値を視差D(i,j)で除した値である。
なお、カメラ座標系は、各撮影装置12−1等が設置された位置(例えば、レンズ1211−1等)を原点とし、撮像素子1212−1等に結像した画像の水平方向ならびに垂直方向、及び光軸方向の座標軸を有する3次元直交座標系である。
【0048】
次に、合成座標情報算出部134が合成座標情報を算出する処理についてより具体的に説明する。
合成座標情報算出部134は、世界座標系の原点を上述の視点情報が表す視点と定め、その視点に対応する座標軸を定める。合成座標情報算出部134は、例えば、視点から上述の基準点への座標軸を奥行方向の座標を表すZ軸と定め、視点を通過しZ軸と垂直であって水平方向に平行な方向に向く座標軸をX軸と定め、視点を通過しZ軸と垂直であってX軸と垂直な座標軸をY軸と定める。
合成座標情報算出部134は、入力された3次元座標情報が示すカメラ座標系における座標値(Xa,Ya,Za)を、例えば式(3)を用いて世界座標系における座標値(Xo,Yo,Zo)を示す合成座標情報に変換する。
【0049】
【数3】
【0050】
式(3)において、Rはカメラ座標系における座標軸を世界座標系における座標軸に回転させることを示す回転行列、Tは座標系間における原点の位置のずれを表す並進ベクトルである。即ち、回転行列Rは、上述の世界座標系の座標軸と、カメラパラメータ情報に含まれる撮影装置12−1等の光軸方向情報によって定められ、並進ベクトルTは、カメラパラメータ情報に含まれる撮影装置12−1等が設置される位置、予め設定された基準点の位置及び上述の視点によって定められる。回転行列Rの各成分は、例えば式(4)のように表される。
【0051】
【数4】
【0052】
式(4)において、θxは、世界座標系におけるx軸回りのカメラ座標系のx軸の回転角、θyは、世界座標系におけるy軸回りのカメラ座標系のy軸の回転角、θzは、世界座標系におけるz軸回りのカメラ座標系のz軸の回転角をそれぞれ示す。
並進ベクトルTの各成分は、(Δx,Δy,Δz)と表される。Δxは、カメラ座標系の原点から世界座標系の原点までのx軸方向の移動量、Δyは、カメラ座標系の原点から世界座標系の原点までのy軸方向の移動量、Δzは、カメラ座標系の原点から世界座標系の原点までのz軸方向の移動量をそれぞれ示す。
従って、式(4)は、カメラ座標系における座標値(Xa,Ya,Za)に、両座標系の座標軸の回転を表す回転行列Rを乗じ、さらに両座標系の原点の移動を表す並進ベクトルTを加算して世界座標系における座標値(Xo,Yo,Zo)を算出することを表す。
【0053】
次に、撮影画像合成部135が行う画像信号変換処理についてより具体的に説明する。
撮影画像合成部135は、合成座標情報算出部134から入力された合成座標情報が表す世界座標系における座標値(Xo,Yo,Zo)を、視点を原点とするカメラ座標系における座標値(uo,vo)に、例えば式(5)を用いて変換する。
【0054】
【数5】
【0055】
式(5)は、世界座標系における座標値のうち、水平成分Xoと垂直成分Yoをそれぞれ奥行成分Zoと焦点距離fとの比Zo/fで規格化してカメラ座標系における座標値(uo,vo)を算出することを示す。
【0056】
撮影画像合成部135は、3D座標算出部133から入力された撮影装置毎の画像信号の各画素(i,j)における画素値を、算出した座標値(uo,vo)における画素に割り当てることによって上述の視点に対応する視点画像信号を生成する。
このようにして、撮影画像合成部135は、撮影装置毎に異なる視点の画像信号を共通する視点情報に対応する視点画像信号に変換する。上述のように、撮影画像合成部135は、変換した視点画像信号を撮影装置間で合成して合成撮影画像信号を生成する。
【0057】
次に、本実施形態に係る視点の一例について説明する。
図8は、本実施形態に係る視点の一例を示す概念図である。
図8は、視点を☆印で示し、車両5、6の上面全体を示す。図8の左側が車両5、6の前方、図8の右側が車両5、6の後方、図8の上方が車両5、6の左側方、図8の下方が車両5、6の右側方を示す。即ち、車両6が車両5の左後方にあることを示す。
図8は、視点が車両5の右前方にあり、視点を起点とする太い実線の矢印は、基準点の方向を表す矢印である。
車両5のリアガラス上方を頂点とする一点破線で示された2つの三角形の領域は、撮像部121−3、122−3の水平方向の視野71−3、72−3を示す。車両5の左側面中央を頂点とする一点破線で示された扇形の領域は、撮像部121−2、122−2の水平方向の視野71−2、72−2を示す。
【0058】
図9は、本実施形態に係る視点の一例を示すその他の概念図である。
図9は、視点を☆印で示し、車両5と車両6の左側面全体を示す。図9の左側が車両5、6の前方、図9の右側が車両5、6の後方、図9の上方が車両5、6の上方、図9の下方が車両5、6の下方を示す。即ち、車両6が車両5の後方にあることを示す。
図9は、視点が車両5の上前方にあり、視点を起点とする太い実線の矢印は基準点の方向を表す矢印である。
【0059】
次に、合成撮影画像信号と基準画像信号から生成した表示用画像信号の一例について説明する。次に説明する例では、基準画像信号は車両5の前面の画像を表し、合成撮影画像信号は車両6の前面の画像を表す。但し、この例では干渉判定部137は、基準画像信号と合成撮影画像信号が干渉するか否かを判定していない。
図10は、表示用画像信号の一例を示す概念図である。
図10において、画像信号が被写体として車両5、6の前面を表す。☆印は、視点を表す。視点を起点とする太い実線の矢印は、基準点の方向を表す矢印である。左右方向に延び視点を通る一点破線は、車両5の左右方向を示す。左上方から右下方に延び視点を通る一点破線は、車両5の前後方向を示す。上下に延び視点を通る一点破線は、車両5の上下方向を示す。
太い実線の矢印と左上方から右下方に延び視点を通る一点破線を結ぶ両端が矢印の円弧は、視点からの基準点の方向が水平方向よりも左下方に向かうことを表す。
図10が示す合成撮影画像信号は、車両6の右前方の一部が車両5の一部に覆われること、つまり、基準画像信号と合成撮影画像信号が干渉していることを示す。
【0060】
次に、合成撮影画像信号と基準画像信号から生成した表示用画像信号の他の例について説明する。基準画像信号と合成撮影画像信号が表す被写体の画像は、図10に示す例と同様である。但し、この例では干渉判定部137は、基準画像信号と合成撮影画像信号が干渉すると判定し、視点更新部138は視点が更に上方に移動するように視点情報を更新する。
図11は、表示用画像信号のその他の例を示す概念図である。
図11において、☆印は、視点を表し、視点を起点とする太い実線の矢印は、基準点の方向を表す矢印である。この例では、視点が上方に移動したため、視点からの基準点の相対的な位置が図10に示す例よりも下方を向いていることを表す。
図11が示す表示用画像信号は、車両6の画像と車両5の画像が互いに離間していること、つまり、基準画像信号と合成撮影画像信号が干渉していないことを示す。
【0061】
以上に説明したように、本実施形態では、撮影装置から入力された画像信号が表す被写体について当該被写体を視認する位置である視点からの座標情報を算出し、算出した座標情報に基づいて前記入力された画像信号を前記視点から前記被写体が視認される画像を表す合成撮影画像信号を生成し、生成した合成撮影画像信号と予め定めた被写体を表す基準画像信号とが干渉するか否かを判定し、前記合成撮影画像信号と前記基準画像信号が干渉すると判断した場合、前記視点を更新する。
これにより、周囲環境を表わす合成撮影画像信号が表す被写体が他の基準画像信号が表す被写体と離間して表示されるため、利用者はいずれの被写体も俯瞰できるようになり、被写体の位置関係を容易に把握することができる。
【0062】
(第2の実施形態)
次に、図面を参照しながら本発明の第2の実施形態について説明する。
図12は、本実施形態に係る画像表示システム2の構成を示す概略図である。
画像表示システム2は、撮影装置12−1〜12−4、画像表示装置23を含んで構成される。
画像表示装置23は、距離情報算出部131−1〜131−4、カメラパラメータ記憶部132、3D座標算出部133、合成座標情報算出部144、撮影画像合成部145、基準画像記憶部136、干渉判定部137、視点更新部138、基準画像合成部139、拡大率算出部148及び画像表示部151を含んで構成される。
即ち、本実施形態では、画像表示装置23が、画像表示装置13の合成座標情報算出部134と撮影画像合成部135の代わりに、合成座標情報算出部144、撮影画像合成部145及び拡大率算出部148を備える点が、画像表示システム1の画像表示装置13と異なる。画像表示装置23のその他の構成部や各構成部の処理は、画像表示装置13と同様である。以下、第1の実施形態と異なる点を主に説明する。
【0063】
合成座標情報算出部144は、合成座標算出部134と同様な処理を行って合成座標情報を算出し、算出した合成座標情報を撮影画像合成部145に出力する。合成座標情報算出部144は、算出した合成座標情報が表す座標値(Xo,Yo,Zo)のうち奥行成分Zoを抽出し、抽出した奥行成分Zoを距離情報Lとして拡大率算出部148に出力する。この距離情報Lは、視点情報が表す視点から被写体の各座標までの距離を表す。
【0064】
撮影画像合成部145は、撮影画像合成部135と同様に合成座標情報算出部144から入力された合成座標情報に基づき、3D座標算出部133から入力された撮影装置毎の画像信号を前述の視点情報に対応する画像信号に変換する。
但し、撮影画像合成部145は、拡大率算出部148から入力された拡大率情報が表す拡大率Mに基づいて、入力された合成座標情報が表す座標値(Xo,Yo,Zo)をカメラ座標系における座標値(uo,vo)に、例えば式(6)を用いて変換する。
【0065】
【数6】
【0066】
式(6)は、式(5)で求められる座標値にさらに拡大率Mを乗じて座標値(uo,vo)を算出することを示す。即ち、被写体を表す画像が拡大率Mだけ拡大又は縮小されることを示す。
【0067】
拡大率算出部148は、合成座標情報算出部144から入力された距離情報に基づいて、上述の被写体の拡大率を算出する。拡大率算出部148は、算出した拡大率Mを表す拡大率情報を撮影画像合成部135に出力する。
【0068】
ここで、拡大率算出部148が行う処理についてより詳細に説明する。
図13は、本実施形態に係る拡大率算出部の処理を表すフローチャートである。
(ステップS201)拡大率算出部148は、カメラパラメータ記憶部132からカメラパラメータ情報を読み出し、読み出したカメラパラメータ情報から撮影装置毎の位置情報を抽出する。その後、ステップS202に進む。
(ステップS202)拡大率算出部148は、視点更新部138から入力された視点情報を用いて視点から基準画像信号が表す被写体の代表点(例えば、車両5の前面中央部)までの距離L0を算出する。この代表点は、上述の基準点と同一であってもよい。その後、ステップS203に進む。
【0069】
(ステップS203)拡大率算出部148は、合成座標情報算出部144から入力された距離情報が表す距離Lが長くなるほど、小さくなるように、例えば式(7)を用いて拡大率Mを算出する。
【0070】
【数7】
【0071】
式(7)において、Kは予め定めた比例定数である。比例定数Kは、0よりも大きい実数、例えば1である。M0は予め定めた基準画像信号に対する拡大率である。M0は、0よりも大きい実数、例えば1である。その後、ステップS204に進む。
【0072】
(ステップS204)拡大率算出部148は、算出した拡大率Mを表す拡大率情報を撮影画像合成部145に出力する。その後、処理を終了する。
【0073】
このようにして、本実施形態では、撮影された画像信号が表す被写体の大きさを、視点からの距離に応じて拡縮することで、利用者に対する遠近感を調節することができる。
次に、式(7)を用いて拡大率Mを算出する原理について説明する。
図14は、本実施形態に係る撮像部121−1等が備える光学系と被写体の位置関係の一例を示す概念図である。
図14は、左端から右側へ順に撮像素子1212−1、レンズ1211−1、被写体61、被写体62を示す。被写体62、61からレンズ1211−1の中心部を通り撮像素子1212−1に達する一点破線は、レンズ1211−1の光軸を示す。被写体61、62の上下方向の大きさは同等である。被写体61の下端からレンズ1211−1の中心部を通過する実線と撮像素子1212−1の交点611は、被写体61の下端を表す画像の位置を示す。被写体62の下端からレンズ1211−1の中心部を通過する実線と撮像素子1212−1の交点612は、被写体62の下端を表す画像の位置を示す。即ち、レンズ1211−1からの距離が長い被写体を表す画像ほど小さくなり、レンズ1211−1からの距離が短い被写体を表す画像ほど大きくなる。
【0074】
図14において、レンズ1211−1から被写体61の画像が結像する点までの距離はB1、レンズ1211−1から被写体62の画像が結像する点までの距離はB2、レンズ1211−1から被写体61までの距離はL1、レンズ1211−1から被写体62までの距離はL2である。これより、被写体61についての結像倍率m1は、B1/L1となり、B1=m1・L1という関係がある。被写体61についての結像倍率m2は、B2/L2となり、B2=m2・L2という関係がある。レンズ1211−1からの距離が一定値(約3m)以上の場合、経験的に距離は概ね一定値となり、B1、B2は概ね等しくなる。また、B1、B2は、焦点距離fと概ね等しくなる。距離L1から距離L2へ被写体を移動させた場合の拡大率Mは、結像倍率の比m2/m1で表されるから、拡大率Mは距離L2とL1の逆数比であるL1/L2となる。従って、拡大率算出部148は、式(7)に示されるように被写体の距離Lに反比例するように拡大率Mを算出することができる。
【0075】
なお、拡大率算出部148は、式(7)の代わりに式(8)を用いて拡大率Mを算出してもよい。
【0076】
【数8】
【0077】
式(8)において、Aは予め定めたべき乗係数を示す。Aは0よりも大きい実数(例えば、1.5)である。Aを1よりも大きい値にすることで実際の距離の変化よりも画像の大きさの変化を著しくすることができる。Aを1よりも小さい値にすることで実際の距離の変化よりも画像の大きさの変化を緩やかにすることができる。
【0078】
なお、式(7)、(8)において比例定数Kを変更することによって、画像の大きさを変化させることができる。Kを大きくするほど表される画像が大きくなり、Kを小さくするほど表される画像が小さくなる。
このように画像の大小を変化させることにより、利用者に対して注意を喚起する度合いを調節することができる。
【0079】
次に、本実施形態に係る画像表示装置23が生成した表示用画像信号の一例について説明する。基準画像信号と合成撮影画像信号が表す被写体の画像は、図10、11に示す例と同様である。但し、この例では、車両6の画像を表す合成撮影画像信号は、拡大率算出部148が算出した拡大率情報に基づいて縮小されるように合成されている。
図15は、表示用画像信号のその他の例を示す概念図である。
図15において、☆印は、視点を表し、視点を起点とする太い実線の矢印は、基準点の方向を示す矢印である。この矢印は図11に示す例ほど下方に向いていないことを表す。即ち、図10に示す視点の初期値からの変化が図11に示す視点よりも少ないことを示す。図15が示す合成撮影画像信号は、車両6の画像と車両5の画像が互いに離間していること、つまり、基準画像信号と合成撮影画像信号が干渉していないことを示す。
【0080】
以上に説明したように、本実施形態では、視点から、入力された画像信号が表す被写体までの距離に基づいて拡大率を算出し、画像信号が表す被写体を算出した拡大率で拡大又は縮小するように合成撮影画像信号を生成する。
これにより、視点を大きく変更しなくとも、基準画像信号と合成撮影画像信号が干渉しないように、合成撮像画像信号が表す画像を拡縮することができる。また、利用者は、合成撮影画像信号が表す被写体が視点からの距離感をもって俯瞰できるようになる。
【0081】
(第3の実施形態)
次に、本発明の第3の実施形態について説明する。
図16は、本実施形態に係る画像表示システム3の構成を示す概略図である。
画像表示システム3は、撮影装置12−1、画像表示装置33を含んで構成される。
即ち、本実施形態に係る画像表示システム3は、図1に示す画像表示システム1において、撮影装置12−1及び距離情報算出部131−1を1個ずつ備え、撮影装置12−2〜12−4と距離情報算出部131−2〜131−4を省略して構成される。撮影画像合成部135は、変換した撮影装置毎の画像信号を合成して合成撮影画像信号を生成する処理を省略し、変換した画像信号を合成撮影画像信号として干渉判定部137に出力する。
本実施形態では撮影装置12−1を1個のみ備え、撮影される視野が限定される場合でも、撮影した画像信号と基準画像信号の被写体の画像が重複しないように表示用画像信号を生成することができる。
【0082】
(第4の実施形態)
次に、本発明の第4の実施形態について説明する。
図17は、本実施形態に係る画像表示システム4の構成を示す概略図である。
本実施形態に係る画像表示システム4は、撮影装置12−1、画像表示装置43を含んで構成される。
即ち、本実施形態に係る画像表示システム4は、図12に示す画像表示システム2において、撮影装置12−1及び距離情報算出部131−1を1個ずつ備え、撮影装置12−2〜12−4と距離情報算出部131−2〜131−4を省略して構成される。撮影画像合成部145は、変換した撮影装置毎の画像信号を合成して合成撮影画像信号を生成する処理を省略し、変換した画像信号を合成撮影画像信号として干渉判定部137に出力する。
本実施形態では撮影装置12−1を1個のみ備え撮影される視野が限定される場合でも、撮影した画像信号と基準画像信号の被写体の画像が重複しないように表示用画像信号を生成することができる。
【0083】
上述の第2、4の実施形態は、合成座標情報算出部144から入力された距離情報に基づいて、被写体の拡大率を算出する拡大率算出部148を備え、撮影画像合成部145が算出した拡大率に基づいて被写体の画像を拡大又は縮小する例を示した。これらの実施形態では、拡大率算出部148の代わりに合成座標情報算出部144から入力された距離情報に基づいて、被写体の方位角を算出する角度算出部158(図示せず)を備え、撮影画像合成部145が算出した方位角に基づいて被写体の画像の方位を変更してもよい。
【0084】
なお、上述した実施形態において画像表示装置13、23、33又は43は、画像処理ECU(Electronic Control Unit、電子制御装置)部(図示せず)を備えてもよい。画像処理ECU部は、距離情報算出部131−1等又は合成座標情報算出部144から被写体の距離情報を逐次に入力され、被写体までの距離の計時変化に基づいて被写体との相対速度や被写体が自車両に到達するまでの時間(衝突時間)を算出してもよい。画像処理ECU部は、算出した時間が予め定めた閾値よりも小さい場合に、当該被写体に接触又は衝突する危険が高いと判断する。このとき、画像処理ECU部は、運転者に注意を喚起する情報を示す音声や画像を提示する。又は、画像処理ECU部は、車両の動作機構(例えば、アクセル、ブレーキ、ステアリング等)に接触又は衝突を回避するための制御信号を出力してもよい。
【0085】
上述した実施形態について、画像表示システム1、2、3又は4は、撮影装置12−1等、距離情報算出部131−1等を、各1個又は各4個備える構成について説明したが、本実施形態ではこれには限られない。本実施形態では、任意の個数の撮影装置12−1等及び距離情報算出部131−1等を備えていてもよい。
【0086】
上述した実施形態において、基準画像記憶部136は、予め視点情報と対応付けて基準画像信号を記憶させておき、干渉判定部137は入力された視点情報に対応する基準画像信号を読み出す構成について説明したが、本実施形態ではこれには限られない。本実施形態では、基準画像記憶部136は、予め定めた単一の視点情報に対応する基準画像情報を記憶させておき、干渉判定部137は、記憶された基準画像情報を座標変換して入力された視点情報に対応する基準画像信号を生成してもよい。
【0087】
上述した実施形態について、撮影画像合成部135又は145が合成した合成撮影画像信号に対して干渉判定部137が干渉するか否かの判定、視点更新部138が視点情報の更新、拡大率算出部148が拡大率の算出を一括して行う構成について説明した。本実施形態ではこれには限られない。本実施形態では、合成撮影画像信号が表す被写体の画像信号毎に、これらの機能部が各々の処理を行ってもよい。そのために撮影画像合成部135、145は、合成撮影画像信号に対して、例えばエッジ抽出を行って、被写体毎に表示される領域の画像信号を識別する被写体情報を生成する。この被写体情報を用いて各構成部が、被写体毎の画像信号を識別できるようにしてもよい。
【0088】
上述の実施形態について、距離情報算出部131−1等は、撮影装置12−1等から入力された画像信号間の視差に基づいて当該画像信号が表す全ての被写体の距離情報を算出することを前提としていたが、本実施形態ではこれには限られない。本実施形態では、当該画像信号が表す被写体のうち、少なくとも一部の被写体までの距離情報を別途の距離情報取得部(例えば、測距センサ、図示せず)が取得するようにしてもよい。その場合、3D座標算出部133は当該距離情報取得部から入力された当該被写体の距離情報を、当該被写体を表す画像信号に係る3次元座標情報の算出に用いてもよい。
【0089】
上述の実施形態について、視点更新部138は、干渉判定部137が判定した合成撮影画像信号と基準画像信号が干渉する領域の面積が、さらに減少するように視点情報を更新してもよい。ここで、視点更新部138は、今回の視点情報に基づいて算出された干渉する領域の面積が、前記の視点情報に基づいて算出された干渉する領域の面積よりも増加した場合、今回視点情報を更新する更新量の正負を、前回から今回の更新量とは逆転させる。これにより、合成撮影画像信号と基準画像信号が干渉しても、干渉する領域の面積が減少させ、各被写体の画像が離間するように視点情報を定めることができる。
【0090】
上述の実施形態において、基準画像合成部139は、干渉判定部137から入力された合成撮影画像信号と基準画像信号のいずれか一方が、他方の画像よりも強調されるように合成して、表示用画像信号を生成するようにしてもよい。例えば、基準画像合成部139は、合成撮影画像信号が表す被写体の画像の輝度を予め設定した輝度値だけ増加させてもよいし、他の部分の画像の輝度を予め設定した輝度値だけ減少させてもよい。基準画像合成部139は、その被写体の画像の特定の色成分(例えば、赤色R)の輝度値と、他の部分の画像の当該色成分の輝度値の差分が、予め設定した値よりも大きくなるように当該色成分値を変更してもよい。これにより、運転者は周囲環境を示す合成撮影画像信号と、必ずしも周囲環境を示さない基準画像信号を容易に識別することができる。
【0091】
なお、上述した実施形態における画像表示装置13、23、33又は43の一部、例えば、距離情報算出部131−1等、3D座標算出部133、合成座標情報算出部134もしくは144、撮影画像合成部135もしくは145、干渉判定部137、視点更新部138、基準画像合成部139及び拡大率算出部148をコンピュータで実現するようにしても良い。その場合、この制御機能を実現するためのプログラムをコンピュータ読み取り可能な記録媒体に記録して、この記録媒体に記録されたプログラムをコンピュータシステムに読み込ませ、実行することによって実現しても良い。なお、ここでいう「コンピュータシステム」とは、画像表示装置13、23、33及び43に内蔵されたコンピュータシステムであって、OSや周辺機器等のハードウェアを含むものとする。また、「コンピュータ読み取り可能な記録媒体」とは、フレキシブルディスク、光磁気ディスク、ROM、CD−ROM等の可搬媒体、コンピュータシステムに内蔵されるハードディスク等の記憶装置のことをいう。さらに「コンピュータ読み取り可能な記録媒体」とは、インターネット等のネットワークや電話回線等の通信回線を介してプログラムを送信する場合の通信線のように、短時間、動的にプログラムを保持するもの、その場合のサーバやクライアントとなるコンピュータシステム内部の揮発性メモリのように、一定時間プログラムを保持しているものも含んでも良い。また上記プログラムは、前述した機能の一部を実現するためのものであっても良く、さらに前述した機能をコンピュータシステムにすでに記録されているプログラムとの組み合わせで実現できるものであっても良い。
また、上述した実施形態における画像表示装置13、23、33及び43の一部、または全部を、LSI(Large Scale Integration)等の集積回路として実現しても良い。画像表示装置2の各機能ブロックは個別にプロセッサ化してもよいし、一部、または全部を集積してプロセッサ化しても良い。また、集積回路化の手法はLSIに限らず専用回路、または汎用プロセッサで実現しても良い。また、半導体技術の進歩によりLSIに代替する集積回路化の技術が出現した場合、当該技術による集積回路を用いても良い。
【0092】
以上、図面を参照してこの発明の一実施形態について詳しく説明してきたが、具体的な構成は上述のものに限られることはなく、この発明の要旨を逸脱しない範囲内において様々な設計変更等をすることが可能である。
【符号の説明】
【0093】
1、2、3、4…画像表示システム、12−1〜12−4…撮影装置、
121−1〜121−4、122−1〜122−4…撮像部、
1211−1〜1211−4…レンズ、1222−1〜1222−4…撮像素子、
13、23、33、43…画像表示装置、
131−1〜131−4…距離情報算出部、132…カメラパラメータ記憶部、
133…3D座標算出部、134、144…合成座標情報算出部、
135、145…撮影画像合成部、136…基準画像記憶部、137…干渉判定部、
138…視点更新部、139…基準画像合成部、148…拡大率算出部、
151…画像表示部
【特許請求の範囲】
【請求項1】
画像信号が表す被写体の座標情報を算出する座標情報算出部と、
前記座標情報算出部が算出した座標情報に基づいて前記入力された画像信号をある視点からの画像を表す合成撮影画像信号を生成する撮影画像合成部と、
前記撮影画像合成部が生成した合成撮影画像信号と予め定めた被写体を表す基準画像信号とが干渉するか否かを判定する干渉判定部と、
前記干渉判定部が前記合成撮影画像信号と前記基準画像信号が干渉すると判定した場合、
前記視点を更新する視点更新部と、
を備えることを特徴とする画像表示装置。
【請求項2】
前記座標情報算出部は、前記視点として前記視点更新部が更新した視点情報が表す視点を用いて前記座標情報を算出することを特徴とする請求項1に記載の画像表示装置。
【請求項3】
前記視点から前記画像信号が表す被写体までの距離に基づいて拡大率を算出する拡大率算出部を備え、
前記撮影画像合成部は、前記画像信号が表す被写体を前記拡大率算出部が算出した拡大率で拡大又は縮小するように前記合成撮影画像信号を生成すること、
を特徴とする請求項2に記載の画像表示装置。
【請求項4】
前記干渉判定部は、前記合成撮影画像信号が表す被写体を表示する座標と前記基準画像信号が表す被写体の画像を表示する座標が重複するか否かにより、前記合成撮影画像信号と前記基準画像信号が干渉するか否かを判断することを特徴とする請求項1ないし3のいずれか1項に記載の画像表示装置。
【請求項5】
画像を撮影する撮影装置と画像表示装置を備え、
前記画像表示装置は、
前記撮影装置から入力された画像信号が表す被写体の座標情報を算出する座標情報算出部と、
前記座標情報算出部が算出した座標情報に基づいて前記入力された画像信号をある視点からの画像を表す合成撮影画像信号を生成する撮影画像合成部と、
前記撮影画像合成部が生成した合成撮影画像信号と予め定めた被写体を表す基準画像信号とが干渉するか否かを判定する干渉判定部と、
前記干渉判定部が前記合成撮影画像信号と前記基準画像信号が干渉すると判定した場合、
前記視点を更新する視点更新部と、
を備えることを特徴とする画像表示システム。
【請求項6】
前記撮影装置として複数個の撮影装置を互いに異なる位置に備え、
前記撮影画像合成部は、前記複数個の撮影装置の各々から入力された画像信号に基づいて前記合成撮影画像信号を生成することを特徴とする請求項5に記載の画像表示システム。
【請求項7】
画像表示装置における画像表示方法において、
前記画像表示装置が、画像信号が表す被写体の座標情報を算出する過程と、
前記画像表示装置が、前記算出した座標情報に基づいて前記入力された画像信号をある視点からの画像を表す合成撮影画像信号を生成する過程と、
前記画像表示装置が、前記生成した合成撮影画像信号と予め定めた被写体を表す基準画像信号とが干渉するか否かを判定する過程と、
前記画像表示装置が、前記合成撮影画像信号と前記基準画像信号が干渉すると判定した場合、前記視点を更新する過程と
を有することを特徴とする画像表示方法。
【請求項8】
画像表示装置のコンピュータに、
画像信号が表す被写体の座標情報を算出する手順、
前記座標情報算出部が算出した座標情報に基づいて前記入力された画像信号をある視点からの画像を表す合成撮影画像信号を生成する手順、
前記撮影画像合成部が生成した合成撮影画像信号と予め定めた被写体を表す基準画像信号とが干渉するか否かを判定する手順、
前記干渉判定部が前記合成撮影画像信号と前記基準画像信号が干渉すると判定した場合、
前記視点を更新する手順、
を実行させるための画像表示プログラム。
【請求項1】
画像信号が表す被写体の座標情報を算出する座標情報算出部と、
前記座標情報算出部が算出した座標情報に基づいて前記入力された画像信号をある視点からの画像を表す合成撮影画像信号を生成する撮影画像合成部と、
前記撮影画像合成部が生成した合成撮影画像信号と予め定めた被写体を表す基準画像信号とが干渉するか否かを判定する干渉判定部と、
前記干渉判定部が前記合成撮影画像信号と前記基準画像信号が干渉すると判定した場合、
前記視点を更新する視点更新部と、
を備えることを特徴とする画像表示装置。
【請求項2】
前記座標情報算出部は、前記視点として前記視点更新部が更新した視点情報が表す視点を用いて前記座標情報を算出することを特徴とする請求項1に記載の画像表示装置。
【請求項3】
前記視点から前記画像信号が表す被写体までの距離に基づいて拡大率を算出する拡大率算出部を備え、
前記撮影画像合成部は、前記画像信号が表す被写体を前記拡大率算出部が算出した拡大率で拡大又は縮小するように前記合成撮影画像信号を生成すること、
を特徴とする請求項2に記載の画像表示装置。
【請求項4】
前記干渉判定部は、前記合成撮影画像信号が表す被写体を表示する座標と前記基準画像信号が表す被写体の画像を表示する座標が重複するか否かにより、前記合成撮影画像信号と前記基準画像信号が干渉するか否かを判断することを特徴とする請求項1ないし3のいずれか1項に記載の画像表示装置。
【請求項5】
画像を撮影する撮影装置と画像表示装置を備え、
前記画像表示装置は、
前記撮影装置から入力された画像信号が表す被写体の座標情報を算出する座標情報算出部と、
前記座標情報算出部が算出した座標情報に基づいて前記入力された画像信号をある視点からの画像を表す合成撮影画像信号を生成する撮影画像合成部と、
前記撮影画像合成部が生成した合成撮影画像信号と予め定めた被写体を表す基準画像信号とが干渉するか否かを判定する干渉判定部と、
前記干渉判定部が前記合成撮影画像信号と前記基準画像信号が干渉すると判定した場合、
前記視点を更新する視点更新部と、
を備えることを特徴とする画像表示システム。
【請求項6】
前記撮影装置として複数個の撮影装置を互いに異なる位置に備え、
前記撮影画像合成部は、前記複数個の撮影装置の各々から入力された画像信号に基づいて前記合成撮影画像信号を生成することを特徴とする請求項5に記載の画像表示システム。
【請求項7】
画像表示装置における画像表示方法において、
前記画像表示装置が、画像信号が表す被写体の座標情報を算出する過程と、
前記画像表示装置が、前記算出した座標情報に基づいて前記入力された画像信号をある視点からの画像を表す合成撮影画像信号を生成する過程と、
前記画像表示装置が、前記生成した合成撮影画像信号と予め定めた被写体を表す基準画像信号とが干渉するか否かを判定する過程と、
前記画像表示装置が、前記合成撮影画像信号と前記基準画像信号が干渉すると判定した場合、前記視点を更新する過程と
を有することを特徴とする画像表示方法。
【請求項8】
画像表示装置のコンピュータに、
画像信号が表す被写体の座標情報を算出する手順、
前記座標情報算出部が算出した座標情報に基づいて前記入力された画像信号をある視点からの画像を表す合成撮影画像信号を生成する手順、
前記撮影画像合成部が生成した合成撮影画像信号と予め定めた被写体を表す基準画像信号とが干渉するか否かを判定する手順、
前記干渉判定部が前記合成撮影画像信号と前記基準画像信号が干渉すると判定した場合、
前記視点を更新する手順、
を実行させるための画像表示プログラム。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【公開番号】特開2013−74393(P2013−74393A)
【公開日】平成25年4月22日(2013.4.22)
【国際特許分類】
【出願番号】特願2011−210810(P2011−210810)
【出願日】平成23年9月27日(2011.9.27)
【出願人】(000005049)シャープ株式会社 (33,933)
【Fターム(参考)】
【公開日】平成25年4月22日(2013.4.22)
【国際特許分類】
【出願日】平成23年9月27日(2011.9.27)
【出願人】(000005049)シャープ株式会社 (33,933)
【Fターム(参考)】
[ Back to top ]