
画像表示装置及び画像表示装置におけるマイクロフォンの調整方法
【課題】異なる複数の周波数の音波の信号の位相を一致させる各周波数毎の調整値を、効率的に算出する画像表示装置、マイクロフォンの調整方法を提供する。
【解決手段】音源が発する音波を検出するマイクロフォンM1等を有するマイクロフォン群と、音波がマイクロフォン群に到達する時間差に基づき、音源位置を算出する音源位置算出手段とを備えた画像表示装置1で、各マイクロフォンから等距離だけ離れた位置に配置して、音波として、異なる複数の周波数の音波を含むホワイトノイズを発する試験音波発生手段80、85と、音源位置算出手段によって算出した試験音波発生手段の位置に基づき、異なる複数の周波数の音波がマイクロフォン群に到達する時間差を、各周波数毎に算出し、時間差を零にするようにマイクロフォン群によって検出した音波の信号の位相を一致させる各周波数毎の調整値を、一括して算出する調整値算出手段と、を有する。
【解決手段】音源が発する音波を検出するマイクロフォンM1等を有するマイクロフォン群と、音波がマイクロフォン群に到達する時間差に基づき、音源位置を算出する音源位置算出手段とを備えた画像表示装置1で、各マイクロフォンから等距離だけ離れた位置に配置して、音波として、異なる複数の周波数の音波を含むホワイトノイズを発する試験音波発生手段80、85と、音源位置算出手段によって算出した試験音波発生手段の位置に基づき、異なる複数の周波数の音波がマイクロフォン群に到達する時間差を、各周波数毎に算出し、時間差を零にするようにマイクロフォン群によって検出した音波の信号の位相を一致させる各周波数毎の調整値を、一括して算出する調整値算出手段と、を有する。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、表示手段の表示領域に、音源の位置を識別する画像を表示する画像表示装置及び画像表示装置におけるマイクロフォンの調整方法に関する。
【背景技術】
【0002】
本出願人は、特許文献1において、複数(例えば5つ)のマイクロフォンを用い、各マイクロフォン間の音の到達時間差に基づいて音源の位置を推定すると共に、推定された音源位置近傍の映像をカメラで採取し、ディスプレイに表示された前記音源位置近傍の映像上に、音源位置を表示する音源探査システムに関する技術を開示した。
【0003】
本技術によれば、例えば、工場内等の所定の箇所に音源探査システムを設置して、定期的に音源の位置の測定を行うことにより、トランスやモータ等の機器故障に伴って故障音を発する音源を特定できる。これにより機器の異常を効率的に発見できる。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2003−111183号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
ところで一般に、同種のマイクロフォンであっても、各マイクロフォンの周波数毎の位相が異なることがある。そこで、上記の音源探査システムでは各周波数の位相の違いを縮めるために、音源の位置を推定する前に予め複数のマイクロフォンからそれぞれ等距離だけ離れた位置から試験音波を発生させて、各マイクロフォン間における試験音波の到達時間差を零にするように各マイクロフォンによって検出した音波の音波信号の位相を一致させる調整値を算出していた。
【0006】
しかしながら、この調整値は、試験音波としての所望の複数の周波数の音波を順番に発生させた上で、各周波数の音波を発生させる度に一つずつ算出する必要があったため、複数の周波数毎の調整値をすべて算出するためには時間がかかるという不都合があった。特に超音波を含めて試験音波を発生させて、各周波数毎の調整値を算出しようとすると、試験音波に含まれる周波数の範囲が広くなる。このような場合には、試験音波に含まれる広範囲の周波数毎に調整値を一つずつ算出すると、すべての周波数毎の調整値を算出するために長時間を要することが懸念されていた。
【0007】
この発明は、このような状況に鑑み提案されたものであって、複数のマイクロフォンで検出した異なる複数の周波数の音波の信号の位相を一致させる各周波数毎の調整値を、効率的に算出できる画像表示装置及び画像表示装置におけるマイクロフォンの調整方法を提供することを目的とする。
【課題を解決するための手段】
【0008】
請求項1の発明に係る画像表示装置は、カメラによって撮像した撮像画像を表示する表示手段と、所定間隔を隔てて配置されて音源が発する音波を検出する少なくとも2つのマイクロフォンを有するマイクロフォン群と、前記音波が前記マイクロフォン群に到達する時間差に基づいて、前記音源の位置を算出する音源位置算出手段と、前記表示手段に表示された前記撮像画像内に、前記音源の位置を識別する画像を表示する制御を行う表示制御手段と、を備えた画像表示装置において、前記少なくとも2つのマイクロフォンから等距離だけ離れた位置に配置して、前記音波として、異なる複数の周波数の音波を含むホワイトノイズを発する試験音波発生手段と、前記音源位置算出手段によって算出した前記試験音波発生手段の位置に基づいて、前記異なる複数の周波数の音波が前記マイクロフォン群に到達する時間差を、各周波数毎に算出して、該時間差を零にするように前記マイクロフォン群によって検出した前記異なる複数の周波数の音波の信号の位相を一致させる前記各周波数毎の調整値を、一括して算出する調整値算出手段と、を有することを特徴とする。
【0009】
請求項2の発明は、請求項1において、前記マイクロフォン群は、水平方向において前記所定間隔を隔てて配置された前記2つのマイクロフォンからなる第1のマイクロフォン群と、前記水平方向と交差する垂直方向において前記所定間隔を隔てて配置された他の前記2つのマイクロフォンからなる第2のマイクロフォン群と、を備え、前記第1のマイクロフォン群及び前記第2のマイクロフォン群によって検出した前記音波の伝搬速度を補正する補正温度を設定する補正温度設定手段を有し、前記2つのマイクロフォン同士を結ぶ直線と前記他の2つのマイクロフォン同士を結ぶ直線との交点を原点として、前記試験音波発生手段を、前記原点を通る直線上で各マイクロフォンから等距離だけ離れた位置に配置され、前記音源位置算出手段は、前記異なる複数の周波数の音波が前記第1のマイクロフォン群に到達する時間差及び前記補正温度設定手段によって設定した前記補正温度に基づいて、前記原点から前記水平方向に対する前記試験音波発生手段への水平角を算出すると共に、前記異なる複数の周波数の音波が前記第2のマイクロフォン群に到達する時間差及び前記補正温度に基づいて、前記原点から前記垂直方向に対する前記試験音波発生手段への垂直角を算出して、前記水平角及び前記垂直角から前記試験音波発生手段の位置を算出し、前記調整値算出手段は、前記音源位置算出手段によって算出した前記水平角に基づいて、前記異なる複数の周波数の音波が前記第1のマイクロフォン群に到達する時間差を、各周波数毎に算出して、該時間差を零にするように前記第1のマイクロフォン群によって検出した前記異なる複数の周波数の音波の信号の位相を一致させる各周波数毎の第1の調整値を、一括して算出すると共に、前記音源位置算出手段によって算出した前記垂直角に基づいて、前記異なる複数の周波数の音波が前記第2のマイクロフォン群に到達する時間差を、各周波数毎に算出して、該時間差を零にするように前記第2のマイクロフォン群によって検出した前記異なる複数の周波数の音波の信号の位相を一致させる各周波数毎の第2の調整値を、一括して算出することを特徴とする。
【0010】
請求項3の発明は、請求項2において、前記調整値算出手段は、式(1)及び式(2)によって、前記各周波数毎の前記第1の調整値を、式(2)及び式(3)によって、前記各周波数毎の前記第2の調整値をそれぞれ一括して算出することを特徴とする。
P=−D12=−(L/c×sinθ)・・・(1)
c=334+0.6t・・・(2)
Q=−D34=−(L/c×sinφ)・・・(3)
なおPは前記第1の調整値であり、Qは前記第2の調整値である。またD12は前記音波が前記第1のマイクロフォン群に到達する時間差であり、D34は前記音波が前記第2のマイクロフォン群に到達する時間差である。さらにθは前記水平角であり、φは前記垂直角である。加えてcは前記音波の伝搬速度であり、tは前記補正温度である。さらに加えてLは、前記水平方向での前記2つのマイクロフォンの前記所定間隔及び前記垂直方向での前記他の2つのマイクロフォンの前記所定間隔である。
【0011】
請求項4の発明は、請求項1において、前記マイクロフォン群は、水平方向において所定間隔を隔てて配置された前記2つのマイクロフォンからなる第1のマイクロフォン群と、前記水平方向と交差する垂直方向において前記所定間隔を隔てて配置された他の前記2つのマイクロフォンからなる第2のマイクロフォン群と、を備え、前記第1のマイクロフォン群及び前記第2のマイクロフォン群によって検出した前記音波の伝搬速度を補正する補正温度を設定する補正温度設定手段を有し、前記2つのマイクロフォン同士を結ぶ直線と前記他の2つのマイクロフォン同士を結ぶ直線との交点を原点として、前記試験音波発生手段を、前記原点を通る直線上で各マイクロフォンから等距離だけ離れた位置に配置され、前記音源位置算出手段は、前記異なる複数の周波数の音波が前記第1のマイクロフォン群に到達する時間差に基づいて、前記原点からの距離を前記所定間隔の半分とする極座標系における前記原点から前記試験音波発生手段への水平角を算出すると共に、前記異なる複数の周波数の音波が前記第2のマイクロフォン群に到達する時間差及び前記補正温度設定手段によって設定した前記補正温度に基づいて、前記極座標系における前記原点から前記試験音波発生手段への垂直角を算出して、前記水平角及び前記垂直角から前記試験音波発生手段の位置を算出し、前記調整値算出手段は、前記音源位置算出手段によって算出した前記極座標系における前記水平角に基づいて、前記異なる複数の周波数の音波が前記第1のマイクロフォン群に到達する時間差を、各周波数毎に算出して、該時間差を零にするように前記第1のマイクロフォン群によって検出した前記異なる複数の周波数の音波の信号の位相を一致させる各周波数毎の第1の調整値を、一括して算出すると共に、前記音源位置算出手段によって算出した前記極座標系における前記垂直角に基づいて、前記異なる複数の周波数の音波が前記第2のマイクロフォン群に到達する時間差を、各周波数毎に算出して、該時間差を零にするように前記第2のマイクロフォン群によって検出した前記異なる複数の周波数の音波の信号の位相を一致させる各周波数毎の第2の調整値を、一括して算出することを特徴とする。
【0012】
請求項5の発明は、請求項4において、前記調整値算出手段は、式(4)ないし式(6)によって、前記各周波数毎の前記第1の調整値を、式(5)及び式(6)によって、前記各周波数毎の前記第2の調整値をそれぞれ一括して算出することを特徴とする。
R=−D12=−(D34×tanθ1)・・・(4)
S=−D34=−([L/c×sinφ1]/{√1+tan2θ1})・・・(5)
c=334+0.6t・・・(6)
なおPは前記第1の調整値であり、Qは前記第2の調整値である。またD12は前記音波が前記第1のマイクロフォン群に到達する時間差であり、D34は前記音波が前記第2のマイクロフォン群に到達する時間差である。さらにθは前記水平角であり、φは前記垂直角である。加えてcは前記音波の伝搬速度であり、tは前記補正温度である。さらに加えてLは、前記水平方向での前記2つのマイクロフォンの前記所定間隔及び前記垂直方向での前記他の2つのマイクロフォンの前記所定間隔である。
【0013】
請求項6の発明は、請求項1ないし5のいずれかにおいて、前記少なくとも2つのマイクロフォンを、超音波マイクロフォンとして、前記所定間隔を、前記音源が発する超音波の半波長未満にして、前記試験音波発生手段は、前記超音波を含む前記ホワイトノイズを発することを特徴とする。
【0014】
請求項7の発明に係る画像表示装置におけるマイクロフォンの調整方法は、カメラによって撮像した撮像画像を表示手段に表示するステップと、音源が発する音波が、所定間隔を隔てて配置されて前記音波を検出する少なくとも2つのマイクロフォンを有するマイクロフォン群に到達する時間差に基づいて、前記音源の位置を算出するステップと、前記表示手段に表示された前記撮像画像内に、前記音源の位置を識別する画像を表示する制御を行うステップと、を備えた画像表示装置におけるマイクロフォンの調整方法において、異なる複数の周波数の音波を含むホワイトノイズを発する試験音波発生手段を用いて、前記少なくとも2つのマイクロフォンから等距離だけ離れた位置から前記ホワイトノイズを発生させる試験音波発生ステップと、前記試験音波発生手段の位置を算出する位置算出ステップと、前記位置算出ステップによって算出した前記試験音波発生手段の位置に基づいて、前記異なる複数の周波数の音波が前記マイクロフォン群に到達する時間差を、各周波数毎に算出して、該時間差を零にするように前記マイクロフォン群によって検出した前記異なる複数の周波数の音波の信号の位相を一致させる前記各周波数毎の調整値を、一括して算出する調整値算出ステップと、前記調整値算出ステップによって算出した前記調整値に基づいて、前記音源の位置を算出するステップを実行する前に、予め前記異なる複数の周波数毎の前記時間差を零にする調整ステップと、を実行することを特徴とする。
【発明の効果】
【0015】
請求項1の発明に係る画像表示装置及び請求項7の発明に係る画像表示装置におけるマイクロフォンの調整方法によれば、従来のような試験音波として所望の複数の周波数の音波を一つずつ発生させる度に各周波数毎の調整値を一つずつ算出する場合とは異なり、調整値算出手段あるいは調整値算出ステップによって、試験音波としてのホワイトノイズに含まれる各周波数毎の調整値を一括して算出できる。したがって、複数の周波数毎の調整値を効率的に算出できる。
請求項2の発明によれば、調整値算出手段によって、試験音波としてのホワイトノイズに含まれる各周波数毎の調整値を、第1のマイクロフォン群を配置した水平方向における調整値(第1の調整値)と、第2のマイクロフォン群を配置した垂直方向における調整値(第2の調整値)とに分けて効率的に算出できる。
請求項3及び請求項5の発明によれば、調整値算出手段は、比較的簡単な計算式を用いるだけで第1の調整値及び第2の調整値を容易に算出できる。
請求項4の発明によれば、調整値算出手段によって、試験音波としてのホワイトノイズに含まれる各周波数毎の調整値を、極座標系における原点から試験音波発生手段への水平角に基づいて算出する調整値(第1の調整値)と、前記極座標系における前記原点から前記試験音波発生手段への垂直角に基づいて算出する調整値(第2の調整値)とに分けて効率的に導出できる。
請求項6の発明によれば、少なくとも2つのマイクロフォンの配置間隔を超音波の半波長未満にしたことで、マイクロフォンと向き合う試験音波発生手段が発する超音波の到来方向を検出し易くすることが可能になる。
【図面の簡単な説明】
【0016】
【図1】本発明の実施形態1の画像表示装置の概略構成図である。
【図2】同画像表示装置を構成するパーソナルコンピュータの概略ブロック図である。
【図3】同画像表示装置が実行する処理に関するフローチャートである。
【図4】同画像表示装置が実行する調整値算出処理の第1説明図である。
【図5】その第2説明図である。
【図6】同画像表示装置の各マイクロフォンによって検出されたホワイトノイズに含まれる複数の周波数の音波の信号の位相を一致させる調整をした後にディスプレイにホワイトノイズを発するスピーカの配置位置を識別する画像を表示した状態を示す図である。
【図7】同ホワイトノイズに含まれる複数の周波数の音波の信号の位相を一致させる調整を行う前に同ディスプレイに同スピーカの配置位置を識別する画像を表示した状態を示す図である。
【図8】実施形態2の画像表示装置が実行する調整値算出処理の第1説明図である。
【図9】その第2説明図である。
【図10】その第3説明図である。
【発明を実施するための形態】
【0017】
<実施形態1>
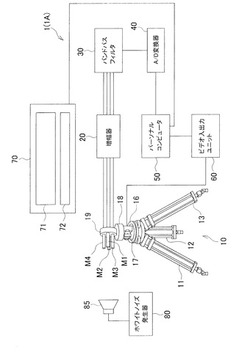
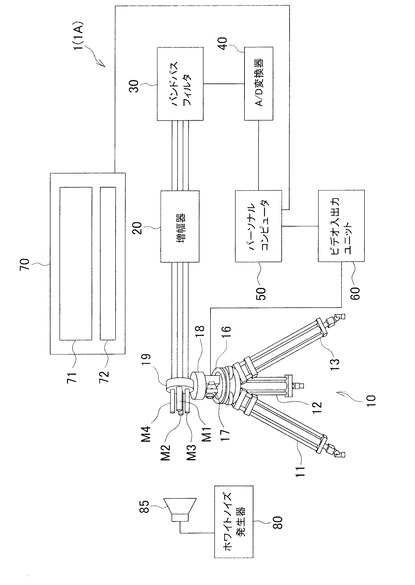
本発明の実施形態1を、図1ないし図6を参照しつつ説明する。本実施形態の画像表示装置1は、測定ユニット10と、増幅器20と、バンドパスフィルタ30と、A/D変換器40と、パーソナルコンピュータ50と、ビデオ入出力ユニット60と、ディスプレイ70と、ホワイトノイズ発生器80と、スピーカ85とを備えている。
【0018】
図1に示すように、測定ユニット10は、支持部材11〜13と、基台16と、CCDカメラ17と、載置固定台18と、マイクロフォン支持台19と、超音波マイクロフォンM1〜M4とを備えている。基台16は、支持部材11〜13の上部に配置されている。載置固定台18は、カメラ支持部材によって基台16上に支持されている。カメラ支持部材にはCCDカメラ17が前方に向けられた状態で固定されている。マイクロフォン支持台19には、超音波マイクロフォンM1〜M4が取り付けられている。ここでは、超音波マイクロフォンM1〜M4は全指向性のものを使用した。マイクロフォン支持台19は、超音波マイクロフォンM1〜M4を前方に向けた状態で載置固定台18に固着されている。
【0019】
測定ユニット10では、一例として外径寸法が5mmの超音波マイクロフォンM1、M2を用いた。両マイクロフォンM1、M2の水平間隔は、検出しようとする超音波の半波長未満に保たれている。ここでは一例として前記水平間隔を0.7cmとして22.5kHzの音波の半波長(約0.8cm)未満にした。なお前記水平間隔は本発明の水平方向での所定間隔の一例であり、両マイクロフォンM1、M2は第1のマイクロフォン群の一例である。また22.5kHzの音波は本発明の超音波の一例である。
【0020】
さらに、超音波マイクロフォンM3、M4の外径寸法は両マイクロフォンM1、M2の外径寸法と同じである。両マイクロフォンM3、M4は、両マイクロフォンM1、M2を結ぶ水平線を2等分する位置で該水平線と交差する垂直線上に垂直間隔を保って配置されている。この垂直間隔は上記の水平間隔(0.7cm)と同じ間隔にした。なお、前記垂直間隔は本発明の垂直方向での所定間隔の一例であり、両マイクロフォンM3、M4は第2のマイクロフォン群の一例である。
【0021】
各マイクロフォンM1〜M4は増幅器20に接続されている。増幅器20は、各マイクロフォンM1〜M4から送信された音波信号を増幅する。増幅器20はバンドパスフィルタ30に接続されている。バンドパスフィルタ30によって、フィルタを通過する周波数の帯域が制限される。バンドパスフィルタ30は、A/D変換器40に接続されている。A/D変換器40は、前記音波信号(アナログ信号)をディジタル信号に変換する。ディジタル信号は、パーソナルコンピュータ50に送信される。
【0022】
CCDカメラ17はビデオ入出力ユニット60に接続されている。ビデオ入出力ユニット60は、CCDカメラ17から送信された撮像信号(アナログ信号)をディジタル信号に変換する。ビデオ入出力ユニット60によって、ディジタル信号(撮像信号)はパーソナルコンピュータ50に送信される。パーソナルコンピュータ50はディスプレイ70に接続されている。図1中の符号71、72は、ディスプレイ70の表示領域である。なお、ディスプレイ70は本発明の表示手段の一例である。
【0023】
ホワイトノイズ発生器80は、試験音波として周波数特性が一様なホワイトノイズを発生可能である。このホワイトノイズには、超音波周波数領域(ここでは22.5kHz)の音波が含まれている。ホワイトノイズ発生器80はスピーカ85に接続されている。スピーカ85は、各マイクロフォンM1〜M4の前方に配置されている。さらにスピーカ85は、原点位置O(図4及び図5参照。)を通る直線上で各マイクロフォンM1〜M4から等距離だけ離れた位置に配置されている。この原点位置Oは、超音波マイクロフォンM1と超音波マイクロフォンM2とを結ぶ水平線を2等分する点と、超音波マイクロフォンM3と超音波マイクロフォンM4とを結ぶ垂直線を2等分する点とが重なる位置である。なお、ホワイトノイズ発生器80及びスピーカ85は本発明の試験音波発生手段の一例である。
【0024】
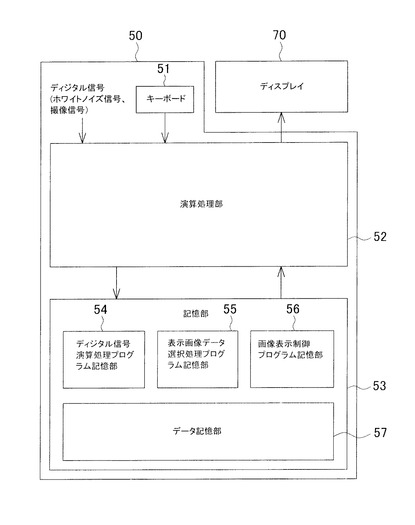
図2は、パーソナルコンピュータ50の概略ブロック図である。パーソナルコンピュータ50は、キーボード51と、演算処理部52と、記憶部53とを備えている。
【0025】
キーボード51は、演算処理部52に接続されている。キーボード51は、超音波マイクロフォンの数、超音波マイクロフォンM1と超音波マイクロフォンM2との水平間隔(ここでは0.7cm)、超音波マイクロフォンM3と超音波マイクロフォンM4との垂直間隔(同0.7cm)、バンドパスフィルタ30を通過させる周波数の設定値等を入力するために用いられる。加えて本実施形態では、画像表示装置1の操作者が、キーボード51を操作して、スピーカ85等の音源から発せられた音の伝搬速度を補正するための測定ユニット10の周囲温度値、後述する水平角度θや垂直角度φの算出間隔、各マイクロフォンM1〜M4によって検出された音波信号の位相を一致させる調整値を入力する。ここでは操作者が、キーボード51を操作して、温度計で測定した前記周囲温度値(例えば20℃)を任意に入力したり、水平角度θや垂直角度φの算出間隔(例えば30回/秒)、後述する第1の調整値P及びR、第2の調整値Q及びSの算出間隔(例えば30回/秒)や第1の調整値P及びR、第2の調整値Q及びSを入力することとした。なお、キーボード51は本発明の補正温度設定手段の一例であり、測定ユニット10の周囲温度は本発明の補正温度の一例である。
【0026】
演算処理部52は、記憶部53及びディスプレイ70にそれぞれ接続されている。記憶部53は、ディジタル信号演算処理プログラム記憶部54と、表示画像データ選択処理プログラム記憶部55と、画像表示制御プログラム記憶部56と、データ記憶部57とを備えている。ディジタル信号演算処理プログラム記憶部54には、図3に示す後述の試験周波数分析処理(S3)、調整値算出処理(S4)等を実行するプログラムが記憶されている。表示画像データ選択処理プログラム記憶部55には、後述の表示領域71、72に表示する円形の画像データを選択する処理を実行するプログラムが記憶されている。画像表示制御プログラム記憶部56には、前記画像データに基づいて表示領域71、72に各種の円形画像をそれぞれ表示する処理等を実行するプログラムが記憶されている。
【0027】
データ記憶部57には、CCDカメラ17からの撮像信号に応じて表示領域71に表示されるCCDカメラ17の撮像画像の画像データや、試験周波数分析処理(S3)、調整値算出処理(S4)によって算出された各データ等が記憶されている。加えて、データ記憶部57には、試験周波数分析処理(S3)によって抽出した選定周波数に対応付けて、互いに色が異なり大きさが同じ円形の画像データが記憶されている。
【0028】
上述したように各マイクロフォンM1〜M4として同種のものを用いた場合でも、各マイクロフォンM1〜M4の周波数毎の位相が異なることがある。そこで本実施形態の画像表示装置1では、ホワイトノイズ発生器80とスピーカ85とを用いてホワイトノイズを発生させて、各マイクロフォンM1〜M4によって検出したホワイトノイズに含まれる異なる複数の周波数の音波の信号の位相を一致させる各周波数毎の調整値を、一括して算出できるようにした。以下に、演算処理部52が前記調整値を算出する処理を説明する。なお、ホワイトノイズ発生器80とスピーカ85とを用いてホワイトノイズを発生させることは本発明の試験音波発生ステップの一例である。
【0029】
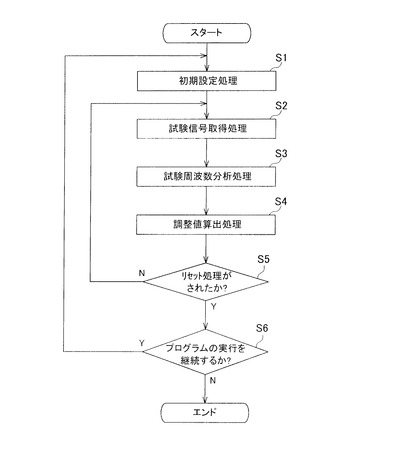
画像表示装置1の電源が投入されると演算処理部52は、図3に示す初期設定処理(S1)と、試験信号取得処理(S2)と、試験周波数分析処理(S3)と、調整値算出処理(S4)とをそれぞれ実行する。
【0030】
初期設定処理(S1)では、キーボード51によって入力された超音波マイクロフォンの数(ここでは4個)、前記水平間隔や前記垂直間隔(いずれも0.7cm)、バンドパスフィルタ30を通過させる周波数の設定値、周囲温度値、水平角度θや垂直角度φの算出間隔(30回/秒)、第1の調整値P及びRや第2の調整値Q及びSの算出間隔(30回/秒)、各表示領域71、72の横寸法X1、X2(図6、図7参照。)や縦寸法Y1、Y2(同図参照。)の値等に関するデータをデータ記憶部57に記憶する処理を実行する。
【0031】
演算処理部52は、初期設定処理(S1)の後に試験信号取得処理(S2)を実行する。試験信号取得処理(S2)では、スピーカ85から発せられたホワイトノイズの信号(音圧レベル)を取得する処理を実行する。ここでは、各マイクロフォンM1〜M4によって検出されたホワイトノイズの信号が、図2に示すように、ディジタル信号として演算処理部52に入力される。その後演算処理部52は、ホワイトノイズの信号に応じたデータをデータ記憶部57に記憶させる処理を実行する。
【0032】
演算処理部52は、試験信号取得処理(S2)の後に試験周波数分析処理(S3)を実行する。試験周波数分析処理(S3)では、ディジタル信号演算処理プログラム記憶部54に記憶されたプログラムを用い、試験信号取得処理(S2)によって取得されたホワイトノイズの信号の音圧レベルを分析し、選定周波数として該音圧レベルが所定の閾値レベルを超える複数の周波数を抽出する処理を実行する。その後試験周波数分析処理(S3)では、選定周波数のデータをデータ記憶部57に記憶する処理を実行する。
【0033】
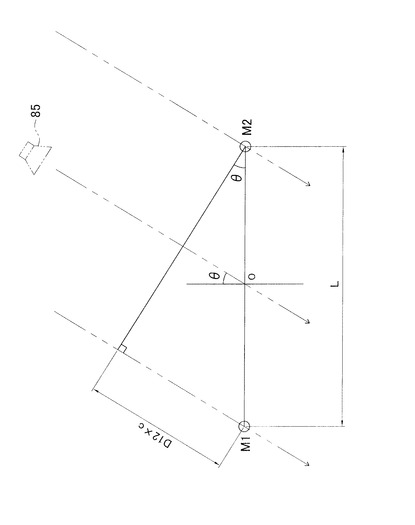
演算処理部52は、試験周波数分析処理(S3)の後に調整値算出処理(S4)を実行する。調整値算出処理(S4)では、ディジタル信号演算処理プログラム記憶部54に記憶されたプログラムを用い以下に説明する手法によって、超音波マイクロフォンM1、M2によって検出した複数の選定周波数の音波の信号の位相を一致させる各選定周波数毎の調整値(第1の調整値P、第2の調整値Q)を一括して算出する。一例として図4には、超音波マイクロフォンM1、M2の周波数毎の位相が異なることに起因して、ホワイトノイズに含まれる超音波が超音波マイクロフォンM1よりも先に超音波マイクロフォンM2に到達したような状態になることで、超音波マイクロフォンM2によって検出した超音波の信号の位相が、超音波マイクロフォンM1によって検出した超音波の信号の位相よりも進んでいるように見える状態を示した。なお図4中の二点鎖線の矢印で示した方向は、2つの超音波マイクロフォンM1、M2によって検出した超音波の信号の位相差から推定されるホワイトノイズの伝搬方向である。
【0034】
実際にはスピーカ85が、原点位置Oから水平方向(図4中の左右方向)に延びる直線と直交して原点位置Oを通る直線上に配置されていることで、原点位置Oから水平方向に対するスピーカ85の配置位置への水平角度θが零度であるにもかかわらず、図4に示す状態では、原点位置Oから一定の水平角度θだけ傾けた方向にスピーカ85が配置されていると推定されることになる。演算処理部52は、調整値算出処理(S4)において、下記の式(A)、式(2)を用いて複数の選定周波数毎の水平角度θを一括して算出する。算出した水平角度θのデータは、データ記憶部57に記憶される。水平角度θの値は、超音波マイクロフォンM1と超音波マイクロフォンM2との水平間隔L、スピーカ85から発せられた音波が2つの超音波マイクロフォンM1、M2に到達する時間差D12、音波の伝搬経路の温度tによって変化する。ここでは、式(2)中の温度tとして、データ記憶部57に記憶されている測定ユニット10の周囲温度のデータを用いた。下記の式(A)、式(2)中のcは音波の伝搬速度である。なお演算処理部52は本発明の音源位置算出手段の一例であり、調整値算出処理(S4)は本発明の位置算出ステップの一例である。
θ=sin−1{(D12×c)/L}[°]・・・(A)
c=334+0.6t[m/s]・・・(2)
【0035】
続いて演算処理部52は、調整値算出処理(S4)において、下記の式(B)、上記の式(2)を用いて複数の選定周波数毎の時間差D12を一括して算出する。算出した時間差D12のデータはデータ記憶部57に記憶される。ここでは、式(B)中の水平角度θとして、演算処理部52が上記の式(A)、式(2)を用いて算出してデータ記憶部57に記憶させた水平角度θのデータを用いた。
D12=L/c×sinθ・・・(B)
【0036】
その後演算処理部52は、調整値算出処理(S4)において、データ記憶部57に記憶された各選定周波数毎の時間差D12のデータを読み出した上で時間差D12を零にするため、下記の式(1)、上記の式(2)を用い、超音波マイクロフォンM2によって検出した音波の信号の位相を遅らせる各選定周波数毎の第1の調整値Pを一括して算出する。この第1の調整値Pとしては、1秒間に算出した30個の調整値の平均値を採用した。算出した第1の調整値Pのデータはデータ記憶部57に記憶される。なお、演算処理部52は本発明の調整値算出手段の一例であり、調整値算出処理(S4)は本発明の調整値算出ステップの一例である。
P=−D12=−(L/c×sinθ)・・・(1)
【0037】
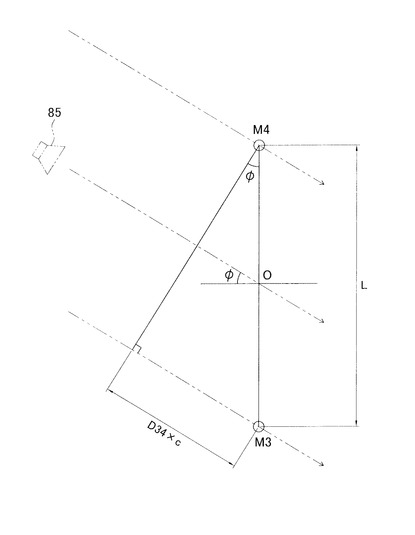
加えて調整値算出処理(S4)では、ディジタル信号演算処理プログラム記憶部54に記憶されたプログラムを用い以下に説明する手法によって、超音波マイクロフォンM3、M4によって検出した音波の信号の位相を一致させる各選定周波数毎の第2の調整値Qを、一括して算出する。一例として図5には、超音波マイクロフォンM3、M4の周波数毎の位相が異なることに起因して、超音波が超音波マイクロフォンM3よりも先に超音波マイクロフォンM4に到達したような状態になることで、超音波マイクロフォンM4によって検出した超音波の信号の位相が、超音波マイクロフォンM3によって検出した超音波の信号の位相よりも進んでいるように見える状態を示した。実際にはスピーカ85が、原点位置O(図4、図5参照。)を通って垂直方向(図5中の上下方向)に延びる直線と直交して原点位置Oを通る直線上に配置されているにもかかわらず、図5に示す状態では、原点位置Oから垂直方向へ一定の垂直角度φだけ傾けた方向にスピーカ85が配置されていると推定されることになる。
【0038】
演算処理部52は、調整値算出処理(S4)において、下記の式(C)、上記の式(2)を用いて複数の選定周波数毎の垂直角度φを一括して算出する。算出した垂直角度φのデータは、データ記憶部57に記憶される。なおD34は、音波が2つの超音波マイクロフォンM3、M4に到達する時間差であり、cは音波の伝搬速度である。Lは、超音波マイクロフォンM3と超音波マイクロフォンM4との垂直間隔である。
φ=sin−1{(D34×c)/L}[°]・・・(C)
【0039】
続いて演算処理部52は、調整値算出処理(S4)において、上記の式(2)及び下記の式(D)を用いて複数の選定周波数毎の時間差D34を一括して算出する。算出した時間差D34のデータはデータ記憶部57に記憶される。ここでは、式(D)中の垂直角度φとして、演算処理部52が式(C)、式(2)を用いて算出してデータ記憶部57に記憶させた垂直角度φのデータを用いた。
D34=L/c×sinφ・・・(D)
【0040】
その後演算処理部52は、調整値算出処理(S4)において、データ記憶部57に記憶された各選定周波数毎の時間差D34のデータを読み出した上で時間差D34を零にするため、下記の式(3)、上記の式(2)を用い、超音波マイクロフォンM4によって検出した音波の信号の位相を遅らせる各選定周波数毎の第2の調整値Qを一括して算出する。この第2の調整値Qも、第1の調整値Pと同様に30個の調整値の平均値を採用した。算出した第2の調整値Qのデータはデータ記憶部57に記憶される。
Q=−D34=−(L/c×sinφ)・・・(3)
【0041】
演算処理部52は、調整値算出処理(S4)の後にリセット処理がされたか否かを判断する(S5)。ここでは、操作者がキーボード51を操作して、リセット動作を指示するキーが押された否かを判断する。
【0042】
S5において演算処理部52が、リセット動作を指示するキーが押されておらずリセット処理がされていないと判断した場合には、試験信号取得処理(S2)に戻る。一方S5において、演算処理部52が、リセット動作を指示するキーが押されてリセット処理がされたと判断した場合には、各記憶部54〜56に記憶されたプログラムの実行を継続するか否かを判断する(S6)。
【0043】
S6において演算処理部52が、操作者がキーボード51を操作してプログラムの実行を継続することを選択したと判断した場合には、初期設定処理(S1)に戻る。一方S6において、演算処理部52が、操作者がキーボード51を操作してプログラムの実行を中止することを選択したと判断した場合には、上述した各処理等(S1〜S6)を終了する。
【0044】
次に、演算処理部52が各表示領域71、72にホワイトノイズを発するスピーカ85の位置を識別する画像を表示する処理について説明する。スピーカ85の位置を識別する画像を表示する処理を開始する前に、上述した各調整値P、Qの算出処理を行った場合には、画像表示装置1の操作者は、キーボード51を操作して、データ記憶部57に記憶されている各調整値P、Qのデータを、データ記憶部57の調整値検出用記憶領域に転送する。
【0045】
演算処理部52は、スピーカ85から発せられたホワイトノイズの信号、CCDカメラ17からの撮像信号を取得する処理をそれぞれ実行する。ここでは、各マイクロフォンM1〜M4によって検出されたホワイトノイズの信号及び前記撮像信号が、図2に示すように、ディジタル信号として演算処理部52に入力される。その後演算処理部52は、ホワイトノイズの信号及び撮像信号に応じたそれぞれのデータをデータ記憶部57に記憶させる処理を実行する。
【0046】
演算処理部52は、ディジタル信号演算処理プログラム記憶部54に記憶されたプログラムによって、上述した試験周波数分析処理(S3)と同様に、選定周波数として複数の周波数を抽出する処理、選定周波数のデータをデータ記憶部57に記憶する処理を実行する。
【0047】
その後演算処理部52は、ディジタル信号演算処理プログラム記憶部54に記憶されたプログラムによって、複数の選定周波数毎の水平角度θを算出する処理を実行する。ここでは最初に演算処理部52が、上記の式(A)、式(2)と同じ計算式を用いて複数の選定周波数毎の水平角度θ11を算出する。これに続き演算処理部52は、データ記憶部57の調整値検出用記憶領域に第1の調整値Pのデータが記憶されていると判断した場合には、前記計算式中の時間差D12に、調整値検出用記憶領域に記憶された第1の調整値Pのデータを代入して水平角度θ12を算出する。最終的に演算処理部52は、水平角度θ11と水平角度θ12とを加算した結果を水平角度θとして決定する。水平角度θ11と水平角度θ12とは同じ値で互いに符号が異なるものであることから、決定された水平角度θは零度になる。このようにして本実施形態の画像表示装置1では、複数の選定周波数毎の音波が2つの超音波マイクロフォンM1、M2に到達する時間差D12をそれぞれ零にする調整が完了する。なお、時間差D12を零にする調整を行うことは、本発明の調整ステップの一例である。
【0048】
加えて演算処理部52は、ディジタル信号演算処理プログラム記憶部54に記憶されたプログラムによって、複数の選定周波数毎の垂直角度φを算出する処理を実行する。ここでは最初に演算処理部52が、上記の式(C)、式(2)と同じ計算式を用いて複数の選定周波数毎の垂直角度φ11を算出する。これに続き演算処理部52は、調整値検出用記憶領域に第2の調整値Qのデータが記憶されていると判断した場合には、前記計算式中の時間差D34に、調整値検出用記憶領域に記憶された第2の調整値Qのデータを代入して垂直角度φ12を算出する。最終的に演算処理部52は、垂直角度φ11と垂直角度φ12とを加算した結果を垂直角度φとして決定する。決定された垂直角度φも、水平角度θと同様に零度になる。このようにして本実施形態の画像表示装置1では、複数の選定周波数毎の音波が2つの超音波マイクロフォンM3、M4に到達する時間差D34をそれぞれ零にする調整が完了する。
【0049】
続いて演算処理部52は、画像表示制御プログラム記憶部56に記憶されたプログラムを実行して以下に説明するように、データ記憶部57から選択した円形の画像データに基づいて、各種の円形画像Z1〜Z4(図6参照。)等を各表示領域71、72に表示する処理を実行する。
【0050】
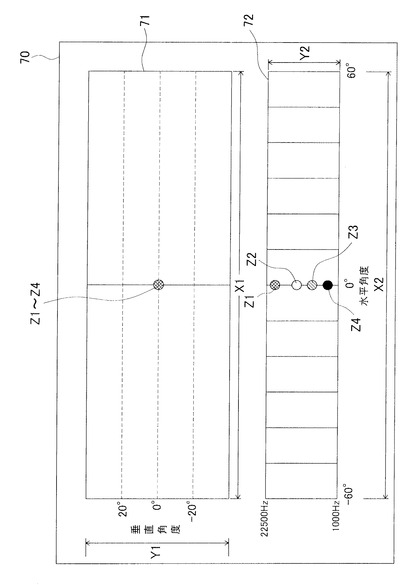
例えばスピーカ85からホワイトノイズを発生させている場合に、演算処理部52は、データ記憶部57から4つの選定周波数(ここでは4kHz〜22kHz)に対応付けされた4つの画像データ(ここでは互いに色が異なる円形の画像データ)を読み出す。その後演算処理部52は、読み出した4つの画像データに基づいて、水平角度θや垂直角度φの算出間隔(ここでは30回/秒)に合わせて1秒あたり画面を30回書き換えて、各表示領域71、72に円形画像Z1〜Z4を表示する。第1の調整値Pを用いて算出した水平角度θ、第2の調整値Qを用いて算出した垂直角度φはどちらも零度であるため、図6に示すように演算処理部52は、表示領域71の横方向において水平角度θが零度の位置で且つ表示領域71の縦方向において垂直角度φが零度の位置に、円形画像Z1〜Z4を重ねて表示する。このように本実施形態の画像表示装置1では、操作者が、表示領域71に表示された円形画像Z1等を目視で確認することで、各マイクロフォンM1〜M4によって検出した音波の信号の位相を一致させる調整が確実に行われたことを目で見て確認することが可能になる。加えて演算処理部52は、表示領域72の縦方向において選定周波数の値に対応する周波数表示位置にも、円形画像Z1〜Z4を表示する。また図示を省略したが演算処理部52は、CCDカメラ17からの撮像信号に基づいて生成した画像信号をディスプレイ70に送信することで、表示領域71に撮像画像を表示する。なお、演算処理部52は本発明の表示制御手段の一例である。
【0051】
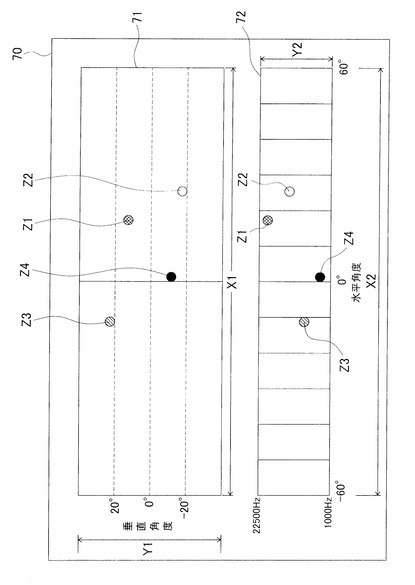
仮に、各調整値P、Qを用いることなく各マイクロフォンM1〜M4の周波数毎の位相が異なるままの状態で水平角度θ、垂直角度φを算出すると、図4及び図5を用いて説明したように、実際には水平角度θや垂直角度φが零度であるにもかかわらず、演算処理部52は、水平角度θや垂直角度φとして一定の値を算出することになる。その結果演算表示部52は、例えば図7に示すように、算出した水平角度θや垂直角度φに基づいて、表示領域71内で実際にスピーカ85を配置した位置とは異なる位置に、円形画像Z1〜Z4を表示することになる。
【0052】
<実施形態1の効果>
本実施形態の画像表示装置1では、従来のような試験音波として所望の複数の周波数の音波を一つずつ発生させる度に、各周波数毎に各マイクロフォンM1〜M4によって検出した音波の信号の位相を一致させる調整値を一つずつ算出する場合とは異なり、演算処理部52は、調整値算出処理(S4)において、試験音波としてのホワイトノイズに含まれる各選定周波数毎の調整値(第1の調整値P、第2の調整値Q)を一括して算出できる。したがって、複数の選定周波数毎の調整値を効率的に算出できる。
【0053】
また演算処理部52は、調整値算出処理(S4)において、ホワイトノイズに含まれる各選定周波数毎の調整値を、2つの超音波マイクロフォンM1、M2を配置した水平方向における第1の調整値Pと、2つの超音波マイクロフォンM3、M4を配置した垂直方向における第2の調整値Qとに分けて効率的に算出できる。
【0054】
さらに演算処理部52は、比較的簡単な計算式(1)〜(3)を用いるだけで、第1の調整値P及び第2の調整値Qを容易に算出できる。
【0055】
加えて2つの超音波マイクロフォンM1、M2の水平間隔Lと2つの超音波マイクロフォンM3、M4の垂直間隔Lとを、スピーカ85が発するホワイトノイズに含まれる超音波の半波長未満に保つことで、4つの超音波マイクロフォンM1〜M4と向き合うスピーカ85から発する超音波の到来方向を検出し易くすることが可能になる。
【0056】
<実施形態2>
本発明の実施形態2を図8ないし図10を参照しつつ説明する。ここでは実施形態1と同一の構成は同一の符号を付しその説明を省略する。本実施形態の画像表示装置1A(図1参照。)では演算処理部52は、図3に示す初期設定処理(S1)において、キーボード51によって入力された後述の極座標系の水平角度θ1や垂直角度φ1の算出間隔(例えば30回/秒)、第1の調整値Rや第2の調整値Sの算出間隔(例えば30回/秒)に関するデータ等をデータ記憶部57に記憶する処理を実行する。
【0057】
演算処理部52は、図3に示す調整値算出処理(S4)において、ディジタル信号演算処理プログラム記憶部54に記憶されたプログラムを用い以下に説明する手法によって選定周波数毎に、原点位置Oからの距離を前記水平間隔Lや前記垂直間隔L(いずれも0.7cm)の半分(L/2)とする極座標系(図8参照。)における前記原点位置Oからスピーカ85の配置位置への水平角度θ1(図8及び図9参照。)を一括して算出する処理を実行する。この水平角度θ1のデータはデータ記憶部57に記憶される。一例として図8には、各マイクロフォンM1〜M4の周波数毎の位相が異なることに起因して、実際にはスピーカ85の配置位置への水平角度θ1が零度であるにもかかわらず、原点位置Oから一定の水平角度θ1だけ傾けた方向にスピーカ85が配置されていると推定された状態を示した。
【0058】
水平角度θ1は、下記の式(F)を用いて算出される。なおD12は、スピーカ85から発せられたホワイトノイズに含まれる音波が2つの超音波マイクロフォンM1、M2に到達する時間差であり、D34は、前記音波が2つの超音波マイクロフォンM3、M4に到達する時間差である。
θ1=tan−1(D12/D34)[°]・・・(F)
【0059】
続いて演算処理部52は、調整値算出処理(S4)において、下記の式(G)及び式(6)を用いて極座標系(図8参照。)における原点位置Oからスピーカ85の配置位置への垂直角度φ1(図8及び図10参照。)を、複数の選定周波数に亘り一括して算出し、垂直角度φ1のデータをデータ記憶部57に記憶する処理を実行する。本実施形態では、図8に示す極座標系の球面が原点位置Oからの距離を同じくすることから、図10に示すように便宜的に前記球面上に仮想マイクMを配置することで垂直角度φ1を算出できると考えた。なお、cは音波の伝搬速度、Lは前記水平間隔及び前記垂直間隔、tは音波の伝搬経路の温度である。
φ1=sin−1{[√(D122+D342)]×c/L}[°]・・・(G)
c=334+0.6t[m/s]・・・(6)
【0060】
その後演算処理部52は、調整値算出処理(S4)において、上記の式(6)、下記の式(H)、式(I)を用いて複数の選定周波数毎の時間差D12及び時間差D34をそれぞれ一括して算出する。算出した各時間差D12、D34のデータはデータ記憶部57に記憶される。ここでは、式(H)中及び式(I)中の水平角度θ1として、演算処理部52が式(F)を用いて算出してデータ記憶部57に記憶させた水平角度θ1のデータを、式(I)中の垂直角度φ1として、演算処理部52が式(G)、式(6)を用いて算出してデータ記憶部57に記憶させた垂直角度φ1のデータを、それぞれ用いた。
D12=D34×tanθ1・・・(H)
D34=[L/c×sinφ1]/{√1+tan2θ1}・・・(I)
【0061】
さらに演算処理部52は、調整値算出処理(S4)において、データ記憶部57に記憶された各選定周波数毎の各時間差D12、D34のデータを読み出した上で各時間差D12、D34を零にするために、下記の式(4)、式(5)、上記の式(6)を用い、各マイクロフォンM1〜M4によつて検出した音波の信号の位相を一致させる各選定周波数毎の第1の調整値R、第2の調整値Sを一括して算出する。各調整値R、Sとしては、1秒間に算出した30個の調整値の平均値を採用した。算出した各調整値R、Sのデータはデータ記憶部57に記憶される。
R=−D12=−(D34×tanθ1)・・・(4)
S=−D34=−([L/c×sinφ1]/{√1+tan2θ1})・・・(5)
【0062】
本実施形態においても、演算処理部52は各表示領域71、72にホワイトノイズを発するスピーカ85の位置を識別する画像を表示する処理を実行可能である。この処理を開始する前に、画像表示装置1の操作者は、キーボード51を操作して、データ記憶部57に記憶されている各調整値R、Sのデータを、データ記憶部57の調整値検出用記憶領域に転送する。
【0063】
その後演算処理部52は、ディジタル信号演算処理プログラム記憶部54に記憶されたプログラムによって、複数の選定周波数毎の水平角度θ1、垂直角度φ1をそれぞれ算出する処理を実行する。ここではまず演算処理部52が、上記の式(F)と同様の計算式を用いて複数の選定周波数毎の水平角度θ21を、上記の式(G)及び式(6)と同様の各計算式を用いて複数の選定周波数毎の垂直角度φ21をそれぞれ算出する。
【0064】
これに続き、演算処理部52は、データ記憶部57の調整値検出用記憶領域に第1の調整値Rのデータが記憶されていると判断した場合に、下記の式(J)中の時間差D12に第1の調整値R、式(J)中の時間差D34に第2の調整値Sをそれぞれ代入して水平角度θ22を算出する。水平角度θ22の算出と共に、演算処理部52は、前記調整値検出用記憶領域に第2の調整値Sのデータが記憶されていると判断した場合に、上記の式(6)を用いると共に、下記の式(K)中の各時間差D12、D34に各調整値R、Sを代入して垂直角度φ22を算出する。
θ22=−{tan−1(D12/D34)}[°]・・・(J)
φ22=−(sin−1{[√(D122+D342)]×c/L})[°]・・・(K)
【0065】
そして演算処理部52は、水平角度θ21と水平角度θ22とを加算した結果を水平角度θ1として決定する。水平角度θ21と水平角度θ22とは同じ値で互いに符号が異なるものであることから、決定された水平角度θは零度になる。一方演算処理部52は、垂直角度φ21と垂直角度φ22とを加算した結果を垂直角度φ1として決定する。決定された垂直角度φ1も、水平角度θ1と同様に零度になる。その後演算処理部52は、図6を用いて説明した実施形態1と同様に、表示領域71の横方向において水平角度θ1が零度の位置で且つ表示領域71の縦方向において垂直角度φ1が零度の位置に、円形画像Z1ないしZ4を重ねて表示することが可能になる。
【0066】
<実施形態2の効果>
本実施形態の画像表示装置1Aでは、演算処理部52は、調整値算出処理(S4)において、ホワイトノイズに含まれる各選定周波数毎の調整値を、極座標系における原点位置Oからスピーカ85の配置位置への水平角度θ1に基づいて算出する第1の調整値Rと、前記極座標系における原点位置Oからスピーカ85の配置位置への垂直角度φ1に基づいて算出する第2の調整値Sとに分けて効率的に導出できる。
【0067】
また演算処理部52は、比較的簡単な計算式(4)〜(6)を用いるだけで、第1の調整値R及び第2に調整値Sを容易に算出できる。
【0068】
本発明は、上述した実施形態に限定されるものではなく、発明の趣旨を逸脱しない範囲内において構成の一部を適宜変更して実施できる。例えば上述した実施形態とは異なり、超音波マイクロフォンM1と超音波マイクロフォンM2との水平間隔や超音波マイクロフォンM3と超音波マイクロフォンM4との垂直間隔は、0.7cmに設定することに限らず、検出しようとする超音波の周波数に応じて適宜の値に変更してもよい。さらに、上述した実施形態とは異なり、画像表示装置は4つの超音波マイクロフォンM1〜M4を備えたものに限らず、例えば水平方向に互いに離れて配置された2つの超音波マイクロフォンのみを備えるものや、垂直方向に互いに離れて配置された2つのマイクロフォンのみを備えるものであってもよい。
【0069】
また上述した実施形態では、ホワイトノイズに含まれる音波を超音波マイクロフォンで検出する例を説明したが、超音波マイクロフォンに代えて、超音波周波数領域よりも低い周波数領域の音波を検出可能なマイクロフォンで、ホワイトノイズに含まれる音波を検出するようにしてもよい。
【0070】
加えて上述した実施形態では、操作者がキーボード51を操作して各調整値P〜Sをデータ記憶部57の調整値検出用記憶領域に転送する例を説明したが、これに代えて演算処理部52が、各調整値P〜Sを算出した後に自動的に調整値検出用記憶領域へ転送するようにしてもよい。さらに加えて上述した実施形態1では、一方のマイクロフォンで検出した音波の信号の位相を他方のマイクロフォンで検出した音波の信号の位相よりも遅らせるために用いる各調整値P、Qを算出する例を説明したが、これに代えて、一方のマイクロフォンで検出した音波の信号の位相を他方のマイクロフォンで検出した音波の信号の位相よりも進めるために用いる調整値を算出するようにしてもよい。また上述した実施形態1では、音波の伝搬経路の温度を考慮して各調整値P〜Sを算出する例を説明したが、音波の信号の位相差の調整に高い調整精度を要求する必要がない場合には、前記伝搬経路の温度を考慮しないで調整値を算出するようにしてもよい。
【符号の説明】
【0071】
1、1A・・画像表示装置、17・・CCDカメラ、51・・キーボード、52・・演算処理部、70・・ディスプレイ、80・・ホワイトノイズ発生器、85・・スピーカ、M1〜M4・・超音波マイクロフォン、θ・・4つの超音波マイクロフォンの原点位置から水平方向に対するスピーカの配置位置への水平角度、φ・・原点位置から垂直方向に対するスピーカの配置位置への垂直角度、θ1・・極座標系における原点位置からスピーカの配置位置への水平角度、φ1・・極座標系における原点位置からスピーカの配置位置への垂直角度。
【技術分野】
【0001】
この発明は、表示手段の表示領域に、音源の位置を識別する画像を表示する画像表示装置及び画像表示装置におけるマイクロフォンの調整方法に関する。
【背景技術】
【0002】
本出願人は、特許文献1において、複数(例えば5つ)のマイクロフォンを用い、各マイクロフォン間の音の到達時間差に基づいて音源の位置を推定すると共に、推定された音源位置近傍の映像をカメラで採取し、ディスプレイに表示された前記音源位置近傍の映像上に、音源位置を表示する音源探査システムに関する技術を開示した。
【0003】
本技術によれば、例えば、工場内等の所定の箇所に音源探査システムを設置して、定期的に音源の位置の測定を行うことにより、トランスやモータ等の機器故障に伴って故障音を発する音源を特定できる。これにより機器の異常を効率的に発見できる。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2003−111183号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
ところで一般に、同種のマイクロフォンであっても、各マイクロフォンの周波数毎の位相が異なることがある。そこで、上記の音源探査システムでは各周波数の位相の違いを縮めるために、音源の位置を推定する前に予め複数のマイクロフォンからそれぞれ等距離だけ離れた位置から試験音波を発生させて、各マイクロフォン間における試験音波の到達時間差を零にするように各マイクロフォンによって検出した音波の音波信号の位相を一致させる調整値を算出していた。
【0006】
しかしながら、この調整値は、試験音波としての所望の複数の周波数の音波を順番に発生させた上で、各周波数の音波を発生させる度に一つずつ算出する必要があったため、複数の周波数毎の調整値をすべて算出するためには時間がかかるという不都合があった。特に超音波を含めて試験音波を発生させて、各周波数毎の調整値を算出しようとすると、試験音波に含まれる周波数の範囲が広くなる。このような場合には、試験音波に含まれる広範囲の周波数毎に調整値を一つずつ算出すると、すべての周波数毎の調整値を算出するために長時間を要することが懸念されていた。
【0007】
この発明は、このような状況に鑑み提案されたものであって、複数のマイクロフォンで検出した異なる複数の周波数の音波の信号の位相を一致させる各周波数毎の調整値を、効率的に算出できる画像表示装置及び画像表示装置におけるマイクロフォンの調整方法を提供することを目的とする。
【課題を解決するための手段】
【0008】
請求項1の発明に係る画像表示装置は、カメラによって撮像した撮像画像を表示する表示手段と、所定間隔を隔てて配置されて音源が発する音波を検出する少なくとも2つのマイクロフォンを有するマイクロフォン群と、前記音波が前記マイクロフォン群に到達する時間差に基づいて、前記音源の位置を算出する音源位置算出手段と、前記表示手段に表示された前記撮像画像内に、前記音源の位置を識別する画像を表示する制御を行う表示制御手段と、を備えた画像表示装置において、前記少なくとも2つのマイクロフォンから等距離だけ離れた位置に配置して、前記音波として、異なる複数の周波数の音波を含むホワイトノイズを発する試験音波発生手段と、前記音源位置算出手段によって算出した前記試験音波発生手段の位置に基づいて、前記異なる複数の周波数の音波が前記マイクロフォン群に到達する時間差を、各周波数毎に算出して、該時間差を零にするように前記マイクロフォン群によって検出した前記異なる複数の周波数の音波の信号の位相を一致させる前記各周波数毎の調整値を、一括して算出する調整値算出手段と、を有することを特徴とする。
【0009】
請求項2の発明は、請求項1において、前記マイクロフォン群は、水平方向において前記所定間隔を隔てて配置された前記2つのマイクロフォンからなる第1のマイクロフォン群と、前記水平方向と交差する垂直方向において前記所定間隔を隔てて配置された他の前記2つのマイクロフォンからなる第2のマイクロフォン群と、を備え、前記第1のマイクロフォン群及び前記第2のマイクロフォン群によって検出した前記音波の伝搬速度を補正する補正温度を設定する補正温度設定手段を有し、前記2つのマイクロフォン同士を結ぶ直線と前記他の2つのマイクロフォン同士を結ぶ直線との交点を原点として、前記試験音波発生手段を、前記原点を通る直線上で各マイクロフォンから等距離だけ離れた位置に配置され、前記音源位置算出手段は、前記異なる複数の周波数の音波が前記第1のマイクロフォン群に到達する時間差及び前記補正温度設定手段によって設定した前記補正温度に基づいて、前記原点から前記水平方向に対する前記試験音波発生手段への水平角を算出すると共に、前記異なる複数の周波数の音波が前記第2のマイクロフォン群に到達する時間差及び前記補正温度に基づいて、前記原点から前記垂直方向に対する前記試験音波発生手段への垂直角を算出して、前記水平角及び前記垂直角から前記試験音波発生手段の位置を算出し、前記調整値算出手段は、前記音源位置算出手段によって算出した前記水平角に基づいて、前記異なる複数の周波数の音波が前記第1のマイクロフォン群に到達する時間差を、各周波数毎に算出して、該時間差を零にするように前記第1のマイクロフォン群によって検出した前記異なる複数の周波数の音波の信号の位相を一致させる各周波数毎の第1の調整値を、一括して算出すると共に、前記音源位置算出手段によって算出した前記垂直角に基づいて、前記異なる複数の周波数の音波が前記第2のマイクロフォン群に到達する時間差を、各周波数毎に算出して、該時間差を零にするように前記第2のマイクロフォン群によって検出した前記異なる複数の周波数の音波の信号の位相を一致させる各周波数毎の第2の調整値を、一括して算出することを特徴とする。
【0010】
請求項3の発明は、請求項2において、前記調整値算出手段は、式(1)及び式(2)によって、前記各周波数毎の前記第1の調整値を、式(2)及び式(3)によって、前記各周波数毎の前記第2の調整値をそれぞれ一括して算出することを特徴とする。
P=−D12=−(L/c×sinθ)・・・(1)
c=334+0.6t・・・(2)
Q=−D34=−(L/c×sinφ)・・・(3)
なおPは前記第1の調整値であり、Qは前記第2の調整値である。またD12は前記音波が前記第1のマイクロフォン群に到達する時間差であり、D34は前記音波が前記第2のマイクロフォン群に到達する時間差である。さらにθは前記水平角であり、φは前記垂直角である。加えてcは前記音波の伝搬速度であり、tは前記補正温度である。さらに加えてLは、前記水平方向での前記2つのマイクロフォンの前記所定間隔及び前記垂直方向での前記他の2つのマイクロフォンの前記所定間隔である。
【0011】
請求項4の発明は、請求項1において、前記マイクロフォン群は、水平方向において所定間隔を隔てて配置された前記2つのマイクロフォンからなる第1のマイクロフォン群と、前記水平方向と交差する垂直方向において前記所定間隔を隔てて配置された他の前記2つのマイクロフォンからなる第2のマイクロフォン群と、を備え、前記第1のマイクロフォン群及び前記第2のマイクロフォン群によって検出した前記音波の伝搬速度を補正する補正温度を設定する補正温度設定手段を有し、前記2つのマイクロフォン同士を結ぶ直線と前記他の2つのマイクロフォン同士を結ぶ直線との交点を原点として、前記試験音波発生手段を、前記原点を通る直線上で各マイクロフォンから等距離だけ離れた位置に配置され、前記音源位置算出手段は、前記異なる複数の周波数の音波が前記第1のマイクロフォン群に到達する時間差に基づいて、前記原点からの距離を前記所定間隔の半分とする極座標系における前記原点から前記試験音波発生手段への水平角を算出すると共に、前記異なる複数の周波数の音波が前記第2のマイクロフォン群に到達する時間差及び前記補正温度設定手段によって設定した前記補正温度に基づいて、前記極座標系における前記原点から前記試験音波発生手段への垂直角を算出して、前記水平角及び前記垂直角から前記試験音波発生手段の位置を算出し、前記調整値算出手段は、前記音源位置算出手段によって算出した前記極座標系における前記水平角に基づいて、前記異なる複数の周波数の音波が前記第1のマイクロフォン群に到達する時間差を、各周波数毎に算出して、該時間差を零にするように前記第1のマイクロフォン群によって検出した前記異なる複数の周波数の音波の信号の位相を一致させる各周波数毎の第1の調整値を、一括して算出すると共に、前記音源位置算出手段によって算出した前記極座標系における前記垂直角に基づいて、前記異なる複数の周波数の音波が前記第2のマイクロフォン群に到達する時間差を、各周波数毎に算出して、該時間差を零にするように前記第2のマイクロフォン群によって検出した前記異なる複数の周波数の音波の信号の位相を一致させる各周波数毎の第2の調整値を、一括して算出することを特徴とする。
【0012】
請求項5の発明は、請求項4において、前記調整値算出手段は、式(4)ないし式(6)によって、前記各周波数毎の前記第1の調整値を、式(5)及び式(6)によって、前記各周波数毎の前記第2の調整値をそれぞれ一括して算出することを特徴とする。
R=−D12=−(D34×tanθ1)・・・(4)
S=−D34=−([L/c×sinφ1]/{√1+tan2θ1})・・・(5)
c=334+0.6t・・・(6)
なおPは前記第1の調整値であり、Qは前記第2の調整値である。またD12は前記音波が前記第1のマイクロフォン群に到達する時間差であり、D34は前記音波が前記第2のマイクロフォン群に到達する時間差である。さらにθは前記水平角であり、φは前記垂直角である。加えてcは前記音波の伝搬速度であり、tは前記補正温度である。さらに加えてLは、前記水平方向での前記2つのマイクロフォンの前記所定間隔及び前記垂直方向での前記他の2つのマイクロフォンの前記所定間隔である。
【0013】
請求項6の発明は、請求項1ないし5のいずれかにおいて、前記少なくとも2つのマイクロフォンを、超音波マイクロフォンとして、前記所定間隔を、前記音源が発する超音波の半波長未満にして、前記試験音波発生手段は、前記超音波を含む前記ホワイトノイズを発することを特徴とする。
【0014】
請求項7の発明に係る画像表示装置におけるマイクロフォンの調整方法は、カメラによって撮像した撮像画像を表示手段に表示するステップと、音源が発する音波が、所定間隔を隔てて配置されて前記音波を検出する少なくとも2つのマイクロフォンを有するマイクロフォン群に到達する時間差に基づいて、前記音源の位置を算出するステップと、前記表示手段に表示された前記撮像画像内に、前記音源の位置を識別する画像を表示する制御を行うステップと、を備えた画像表示装置におけるマイクロフォンの調整方法において、異なる複数の周波数の音波を含むホワイトノイズを発する試験音波発生手段を用いて、前記少なくとも2つのマイクロフォンから等距離だけ離れた位置から前記ホワイトノイズを発生させる試験音波発生ステップと、前記試験音波発生手段の位置を算出する位置算出ステップと、前記位置算出ステップによって算出した前記試験音波発生手段の位置に基づいて、前記異なる複数の周波数の音波が前記マイクロフォン群に到達する時間差を、各周波数毎に算出して、該時間差を零にするように前記マイクロフォン群によって検出した前記異なる複数の周波数の音波の信号の位相を一致させる前記各周波数毎の調整値を、一括して算出する調整値算出ステップと、前記調整値算出ステップによって算出した前記調整値に基づいて、前記音源の位置を算出するステップを実行する前に、予め前記異なる複数の周波数毎の前記時間差を零にする調整ステップと、を実行することを特徴とする。
【発明の効果】
【0015】
請求項1の発明に係る画像表示装置及び請求項7の発明に係る画像表示装置におけるマイクロフォンの調整方法によれば、従来のような試験音波として所望の複数の周波数の音波を一つずつ発生させる度に各周波数毎の調整値を一つずつ算出する場合とは異なり、調整値算出手段あるいは調整値算出ステップによって、試験音波としてのホワイトノイズに含まれる各周波数毎の調整値を一括して算出できる。したがって、複数の周波数毎の調整値を効率的に算出できる。
請求項2の発明によれば、調整値算出手段によって、試験音波としてのホワイトノイズに含まれる各周波数毎の調整値を、第1のマイクロフォン群を配置した水平方向における調整値(第1の調整値)と、第2のマイクロフォン群を配置した垂直方向における調整値(第2の調整値)とに分けて効率的に算出できる。
請求項3及び請求項5の発明によれば、調整値算出手段は、比較的簡単な計算式を用いるだけで第1の調整値及び第2の調整値を容易に算出できる。
請求項4の発明によれば、調整値算出手段によって、試験音波としてのホワイトノイズに含まれる各周波数毎の調整値を、極座標系における原点から試験音波発生手段への水平角に基づいて算出する調整値(第1の調整値)と、前記極座標系における前記原点から前記試験音波発生手段への垂直角に基づいて算出する調整値(第2の調整値)とに分けて効率的に導出できる。
請求項6の発明によれば、少なくとも2つのマイクロフォンの配置間隔を超音波の半波長未満にしたことで、マイクロフォンと向き合う試験音波発生手段が発する超音波の到来方向を検出し易くすることが可能になる。
【図面の簡単な説明】
【0016】
【図1】本発明の実施形態1の画像表示装置の概略構成図である。
【図2】同画像表示装置を構成するパーソナルコンピュータの概略ブロック図である。
【図3】同画像表示装置が実行する処理に関するフローチャートである。
【図4】同画像表示装置が実行する調整値算出処理の第1説明図である。
【図5】その第2説明図である。
【図6】同画像表示装置の各マイクロフォンによって検出されたホワイトノイズに含まれる複数の周波数の音波の信号の位相を一致させる調整をした後にディスプレイにホワイトノイズを発するスピーカの配置位置を識別する画像を表示した状態を示す図である。
【図7】同ホワイトノイズに含まれる複数の周波数の音波の信号の位相を一致させる調整を行う前に同ディスプレイに同スピーカの配置位置を識別する画像を表示した状態を示す図である。
【図8】実施形態2の画像表示装置が実行する調整値算出処理の第1説明図である。
【図9】その第2説明図である。
【図10】その第3説明図である。
【発明を実施するための形態】
【0017】
<実施形態1>
本発明の実施形態1を、図1ないし図6を参照しつつ説明する。本実施形態の画像表示装置1は、測定ユニット10と、増幅器20と、バンドパスフィルタ30と、A/D変換器40と、パーソナルコンピュータ50と、ビデオ入出力ユニット60と、ディスプレイ70と、ホワイトノイズ発生器80と、スピーカ85とを備えている。
【0018】
図1に示すように、測定ユニット10は、支持部材11〜13と、基台16と、CCDカメラ17と、載置固定台18と、マイクロフォン支持台19と、超音波マイクロフォンM1〜M4とを備えている。基台16は、支持部材11〜13の上部に配置されている。載置固定台18は、カメラ支持部材によって基台16上に支持されている。カメラ支持部材にはCCDカメラ17が前方に向けられた状態で固定されている。マイクロフォン支持台19には、超音波マイクロフォンM1〜M4が取り付けられている。ここでは、超音波マイクロフォンM1〜M4は全指向性のものを使用した。マイクロフォン支持台19は、超音波マイクロフォンM1〜M4を前方に向けた状態で載置固定台18に固着されている。
【0019】
測定ユニット10では、一例として外径寸法が5mmの超音波マイクロフォンM1、M2を用いた。両マイクロフォンM1、M2の水平間隔は、検出しようとする超音波の半波長未満に保たれている。ここでは一例として前記水平間隔を0.7cmとして22.5kHzの音波の半波長(約0.8cm)未満にした。なお前記水平間隔は本発明の水平方向での所定間隔の一例であり、両マイクロフォンM1、M2は第1のマイクロフォン群の一例である。また22.5kHzの音波は本発明の超音波の一例である。
【0020】
さらに、超音波マイクロフォンM3、M4の外径寸法は両マイクロフォンM1、M2の外径寸法と同じである。両マイクロフォンM3、M4は、両マイクロフォンM1、M2を結ぶ水平線を2等分する位置で該水平線と交差する垂直線上に垂直間隔を保って配置されている。この垂直間隔は上記の水平間隔(0.7cm)と同じ間隔にした。なお、前記垂直間隔は本発明の垂直方向での所定間隔の一例であり、両マイクロフォンM3、M4は第2のマイクロフォン群の一例である。
【0021】
各マイクロフォンM1〜M4は増幅器20に接続されている。増幅器20は、各マイクロフォンM1〜M4から送信された音波信号を増幅する。増幅器20はバンドパスフィルタ30に接続されている。バンドパスフィルタ30によって、フィルタを通過する周波数の帯域が制限される。バンドパスフィルタ30は、A/D変換器40に接続されている。A/D変換器40は、前記音波信号(アナログ信号)をディジタル信号に変換する。ディジタル信号は、パーソナルコンピュータ50に送信される。
【0022】
CCDカメラ17はビデオ入出力ユニット60に接続されている。ビデオ入出力ユニット60は、CCDカメラ17から送信された撮像信号(アナログ信号)をディジタル信号に変換する。ビデオ入出力ユニット60によって、ディジタル信号(撮像信号)はパーソナルコンピュータ50に送信される。パーソナルコンピュータ50はディスプレイ70に接続されている。図1中の符号71、72は、ディスプレイ70の表示領域である。なお、ディスプレイ70は本発明の表示手段の一例である。
【0023】
ホワイトノイズ発生器80は、試験音波として周波数特性が一様なホワイトノイズを発生可能である。このホワイトノイズには、超音波周波数領域(ここでは22.5kHz)の音波が含まれている。ホワイトノイズ発生器80はスピーカ85に接続されている。スピーカ85は、各マイクロフォンM1〜M4の前方に配置されている。さらにスピーカ85は、原点位置O(図4及び図5参照。)を通る直線上で各マイクロフォンM1〜M4から等距離だけ離れた位置に配置されている。この原点位置Oは、超音波マイクロフォンM1と超音波マイクロフォンM2とを結ぶ水平線を2等分する点と、超音波マイクロフォンM3と超音波マイクロフォンM4とを結ぶ垂直線を2等分する点とが重なる位置である。なお、ホワイトノイズ発生器80及びスピーカ85は本発明の試験音波発生手段の一例である。
【0024】
図2は、パーソナルコンピュータ50の概略ブロック図である。パーソナルコンピュータ50は、キーボード51と、演算処理部52と、記憶部53とを備えている。
【0025】
キーボード51は、演算処理部52に接続されている。キーボード51は、超音波マイクロフォンの数、超音波マイクロフォンM1と超音波マイクロフォンM2との水平間隔(ここでは0.7cm)、超音波マイクロフォンM3と超音波マイクロフォンM4との垂直間隔(同0.7cm)、バンドパスフィルタ30を通過させる周波数の設定値等を入力するために用いられる。加えて本実施形態では、画像表示装置1の操作者が、キーボード51を操作して、スピーカ85等の音源から発せられた音の伝搬速度を補正するための測定ユニット10の周囲温度値、後述する水平角度θや垂直角度φの算出間隔、各マイクロフォンM1〜M4によって検出された音波信号の位相を一致させる調整値を入力する。ここでは操作者が、キーボード51を操作して、温度計で測定した前記周囲温度値(例えば20℃)を任意に入力したり、水平角度θや垂直角度φの算出間隔(例えば30回/秒)、後述する第1の調整値P及びR、第2の調整値Q及びSの算出間隔(例えば30回/秒)や第1の調整値P及びR、第2の調整値Q及びSを入力することとした。なお、キーボード51は本発明の補正温度設定手段の一例であり、測定ユニット10の周囲温度は本発明の補正温度の一例である。
【0026】
演算処理部52は、記憶部53及びディスプレイ70にそれぞれ接続されている。記憶部53は、ディジタル信号演算処理プログラム記憶部54と、表示画像データ選択処理プログラム記憶部55と、画像表示制御プログラム記憶部56と、データ記憶部57とを備えている。ディジタル信号演算処理プログラム記憶部54には、図3に示す後述の試験周波数分析処理(S3)、調整値算出処理(S4)等を実行するプログラムが記憶されている。表示画像データ選択処理プログラム記憶部55には、後述の表示領域71、72に表示する円形の画像データを選択する処理を実行するプログラムが記憶されている。画像表示制御プログラム記憶部56には、前記画像データに基づいて表示領域71、72に各種の円形画像をそれぞれ表示する処理等を実行するプログラムが記憶されている。
【0027】
データ記憶部57には、CCDカメラ17からの撮像信号に応じて表示領域71に表示されるCCDカメラ17の撮像画像の画像データや、試験周波数分析処理(S3)、調整値算出処理(S4)によって算出された各データ等が記憶されている。加えて、データ記憶部57には、試験周波数分析処理(S3)によって抽出した選定周波数に対応付けて、互いに色が異なり大きさが同じ円形の画像データが記憶されている。
【0028】
上述したように各マイクロフォンM1〜M4として同種のものを用いた場合でも、各マイクロフォンM1〜M4の周波数毎の位相が異なることがある。そこで本実施形態の画像表示装置1では、ホワイトノイズ発生器80とスピーカ85とを用いてホワイトノイズを発生させて、各マイクロフォンM1〜M4によって検出したホワイトノイズに含まれる異なる複数の周波数の音波の信号の位相を一致させる各周波数毎の調整値を、一括して算出できるようにした。以下に、演算処理部52が前記調整値を算出する処理を説明する。なお、ホワイトノイズ発生器80とスピーカ85とを用いてホワイトノイズを発生させることは本発明の試験音波発生ステップの一例である。
【0029】
画像表示装置1の電源が投入されると演算処理部52は、図3に示す初期設定処理(S1)と、試験信号取得処理(S2)と、試験周波数分析処理(S3)と、調整値算出処理(S4)とをそれぞれ実行する。
【0030】
初期設定処理(S1)では、キーボード51によって入力された超音波マイクロフォンの数(ここでは4個)、前記水平間隔や前記垂直間隔(いずれも0.7cm)、バンドパスフィルタ30を通過させる周波数の設定値、周囲温度値、水平角度θや垂直角度φの算出間隔(30回/秒)、第1の調整値P及びRや第2の調整値Q及びSの算出間隔(30回/秒)、各表示領域71、72の横寸法X1、X2(図6、図7参照。)や縦寸法Y1、Y2(同図参照。)の値等に関するデータをデータ記憶部57に記憶する処理を実行する。
【0031】
演算処理部52は、初期設定処理(S1)の後に試験信号取得処理(S2)を実行する。試験信号取得処理(S2)では、スピーカ85から発せられたホワイトノイズの信号(音圧レベル)を取得する処理を実行する。ここでは、各マイクロフォンM1〜M4によって検出されたホワイトノイズの信号が、図2に示すように、ディジタル信号として演算処理部52に入力される。その後演算処理部52は、ホワイトノイズの信号に応じたデータをデータ記憶部57に記憶させる処理を実行する。
【0032】
演算処理部52は、試験信号取得処理(S2)の後に試験周波数分析処理(S3)を実行する。試験周波数分析処理(S3)では、ディジタル信号演算処理プログラム記憶部54に記憶されたプログラムを用い、試験信号取得処理(S2)によって取得されたホワイトノイズの信号の音圧レベルを分析し、選定周波数として該音圧レベルが所定の閾値レベルを超える複数の周波数を抽出する処理を実行する。その後試験周波数分析処理(S3)では、選定周波数のデータをデータ記憶部57に記憶する処理を実行する。
【0033】
演算処理部52は、試験周波数分析処理(S3)の後に調整値算出処理(S4)を実行する。調整値算出処理(S4)では、ディジタル信号演算処理プログラム記憶部54に記憶されたプログラムを用い以下に説明する手法によって、超音波マイクロフォンM1、M2によって検出した複数の選定周波数の音波の信号の位相を一致させる各選定周波数毎の調整値(第1の調整値P、第2の調整値Q)を一括して算出する。一例として図4には、超音波マイクロフォンM1、M2の周波数毎の位相が異なることに起因して、ホワイトノイズに含まれる超音波が超音波マイクロフォンM1よりも先に超音波マイクロフォンM2に到達したような状態になることで、超音波マイクロフォンM2によって検出した超音波の信号の位相が、超音波マイクロフォンM1によって検出した超音波の信号の位相よりも進んでいるように見える状態を示した。なお図4中の二点鎖線の矢印で示した方向は、2つの超音波マイクロフォンM1、M2によって検出した超音波の信号の位相差から推定されるホワイトノイズの伝搬方向である。
【0034】
実際にはスピーカ85が、原点位置Oから水平方向(図4中の左右方向)に延びる直線と直交して原点位置Oを通る直線上に配置されていることで、原点位置Oから水平方向に対するスピーカ85の配置位置への水平角度θが零度であるにもかかわらず、図4に示す状態では、原点位置Oから一定の水平角度θだけ傾けた方向にスピーカ85が配置されていると推定されることになる。演算処理部52は、調整値算出処理(S4)において、下記の式(A)、式(2)を用いて複数の選定周波数毎の水平角度θを一括して算出する。算出した水平角度θのデータは、データ記憶部57に記憶される。水平角度θの値は、超音波マイクロフォンM1と超音波マイクロフォンM2との水平間隔L、スピーカ85から発せられた音波が2つの超音波マイクロフォンM1、M2に到達する時間差D12、音波の伝搬経路の温度tによって変化する。ここでは、式(2)中の温度tとして、データ記憶部57に記憶されている測定ユニット10の周囲温度のデータを用いた。下記の式(A)、式(2)中のcは音波の伝搬速度である。なお演算処理部52は本発明の音源位置算出手段の一例であり、調整値算出処理(S4)は本発明の位置算出ステップの一例である。
θ=sin−1{(D12×c)/L}[°]・・・(A)
c=334+0.6t[m/s]・・・(2)
【0035】
続いて演算処理部52は、調整値算出処理(S4)において、下記の式(B)、上記の式(2)を用いて複数の選定周波数毎の時間差D12を一括して算出する。算出した時間差D12のデータはデータ記憶部57に記憶される。ここでは、式(B)中の水平角度θとして、演算処理部52が上記の式(A)、式(2)を用いて算出してデータ記憶部57に記憶させた水平角度θのデータを用いた。
D12=L/c×sinθ・・・(B)
【0036】
その後演算処理部52は、調整値算出処理(S4)において、データ記憶部57に記憶された各選定周波数毎の時間差D12のデータを読み出した上で時間差D12を零にするため、下記の式(1)、上記の式(2)を用い、超音波マイクロフォンM2によって検出した音波の信号の位相を遅らせる各選定周波数毎の第1の調整値Pを一括して算出する。この第1の調整値Pとしては、1秒間に算出した30個の調整値の平均値を採用した。算出した第1の調整値Pのデータはデータ記憶部57に記憶される。なお、演算処理部52は本発明の調整値算出手段の一例であり、調整値算出処理(S4)は本発明の調整値算出ステップの一例である。
P=−D12=−(L/c×sinθ)・・・(1)
【0037】
加えて調整値算出処理(S4)では、ディジタル信号演算処理プログラム記憶部54に記憶されたプログラムを用い以下に説明する手法によって、超音波マイクロフォンM3、M4によって検出した音波の信号の位相を一致させる各選定周波数毎の第2の調整値Qを、一括して算出する。一例として図5には、超音波マイクロフォンM3、M4の周波数毎の位相が異なることに起因して、超音波が超音波マイクロフォンM3よりも先に超音波マイクロフォンM4に到達したような状態になることで、超音波マイクロフォンM4によって検出した超音波の信号の位相が、超音波マイクロフォンM3によって検出した超音波の信号の位相よりも進んでいるように見える状態を示した。実際にはスピーカ85が、原点位置O(図4、図5参照。)を通って垂直方向(図5中の上下方向)に延びる直線と直交して原点位置Oを通る直線上に配置されているにもかかわらず、図5に示す状態では、原点位置Oから垂直方向へ一定の垂直角度φだけ傾けた方向にスピーカ85が配置されていると推定されることになる。
【0038】
演算処理部52は、調整値算出処理(S4)において、下記の式(C)、上記の式(2)を用いて複数の選定周波数毎の垂直角度φを一括して算出する。算出した垂直角度φのデータは、データ記憶部57に記憶される。なおD34は、音波が2つの超音波マイクロフォンM3、M4に到達する時間差であり、cは音波の伝搬速度である。Lは、超音波マイクロフォンM3と超音波マイクロフォンM4との垂直間隔である。
φ=sin−1{(D34×c)/L}[°]・・・(C)
【0039】
続いて演算処理部52は、調整値算出処理(S4)において、上記の式(2)及び下記の式(D)を用いて複数の選定周波数毎の時間差D34を一括して算出する。算出した時間差D34のデータはデータ記憶部57に記憶される。ここでは、式(D)中の垂直角度φとして、演算処理部52が式(C)、式(2)を用いて算出してデータ記憶部57に記憶させた垂直角度φのデータを用いた。
D34=L/c×sinφ・・・(D)
【0040】
その後演算処理部52は、調整値算出処理(S4)において、データ記憶部57に記憶された各選定周波数毎の時間差D34のデータを読み出した上で時間差D34を零にするため、下記の式(3)、上記の式(2)を用い、超音波マイクロフォンM4によって検出した音波の信号の位相を遅らせる各選定周波数毎の第2の調整値Qを一括して算出する。この第2の調整値Qも、第1の調整値Pと同様に30個の調整値の平均値を採用した。算出した第2の調整値Qのデータはデータ記憶部57に記憶される。
Q=−D34=−(L/c×sinφ)・・・(3)
【0041】
演算処理部52は、調整値算出処理(S4)の後にリセット処理がされたか否かを判断する(S5)。ここでは、操作者がキーボード51を操作して、リセット動作を指示するキーが押された否かを判断する。
【0042】
S5において演算処理部52が、リセット動作を指示するキーが押されておらずリセット処理がされていないと判断した場合には、試験信号取得処理(S2)に戻る。一方S5において、演算処理部52が、リセット動作を指示するキーが押されてリセット処理がされたと判断した場合には、各記憶部54〜56に記憶されたプログラムの実行を継続するか否かを判断する(S6)。
【0043】
S6において演算処理部52が、操作者がキーボード51を操作してプログラムの実行を継続することを選択したと判断した場合には、初期設定処理(S1)に戻る。一方S6において、演算処理部52が、操作者がキーボード51を操作してプログラムの実行を中止することを選択したと判断した場合には、上述した各処理等(S1〜S6)を終了する。
【0044】
次に、演算処理部52が各表示領域71、72にホワイトノイズを発するスピーカ85の位置を識別する画像を表示する処理について説明する。スピーカ85の位置を識別する画像を表示する処理を開始する前に、上述した各調整値P、Qの算出処理を行った場合には、画像表示装置1の操作者は、キーボード51を操作して、データ記憶部57に記憶されている各調整値P、Qのデータを、データ記憶部57の調整値検出用記憶領域に転送する。
【0045】
演算処理部52は、スピーカ85から発せられたホワイトノイズの信号、CCDカメラ17からの撮像信号を取得する処理をそれぞれ実行する。ここでは、各マイクロフォンM1〜M4によって検出されたホワイトノイズの信号及び前記撮像信号が、図2に示すように、ディジタル信号として演算処理部52に入力される。その後演算処理部52は、ホワイトノイズの信号及び撮像信号に応じたそれぞれのデータをデータ記憶部57に記憶させる処理を実行する。
【0046】
演算処理部52は、ディジタル信号演算処理プログラム記憶部54に記憶されたプログラムによって、上述した試験周波数分析処理(S3)と同様に、選定周波数として複数の周波数を抽出する処理、選定周波数のデータをデータ記憶部57に記憶する処理を実行する。
【0047】
その後演算処理部52は、ディジタル信号演算処理プログラム記憶部54に記憶されたプログラムによって、複数の選定周波数毎の水平角度θを算出する処理を実行する。ここでは最初に演算処理部52が、上記の式(A)、式(2)と同じ計算式を用いて複数の選定周波数毎の水平角度θ11を算出する。これに続き演算処理部52は、データ記憶部57の調整値検出用記憶領域に第1の調整値Pのデータが記憶されていると判断した場合には、前記計算式中の時間差D12に、調整値検出用記憶領域に記憶された第1の調整値Pのデータを代入して水平角度θ12を算出する。最終的に演算処理部52は、水平角度θ11と水平角度θ12とを加算した結果を水平角度θとして決定する。水平角度θ11と水平角度θ12とは同じ値で互いに符号が異なるものであることから、決定された水平角度θは零度になる。このようにして本実施形態の画像表示装置1では、複数の選定周波数毎の音波が2つの超音波マイクロフォンM1、M2に到達する時間差D12をそれぞれ零にする調整が完了する。なお、時間差D12を零にする調整を行うことは、本発明の調整ステップの一例である。
【0048】
加えて演算処理部52は、ディジタル信号演算処理プログラム記憶部54に記憶されたプログラムによって、複数の選定周波数毎の垂直角度φを算出する処理を実行する。ここでは最初に演算処理部52が、上記の式(C)、式(2)と同じ計算式を用いて複数の選定周波数毎の垂直角度φ11を算出する。これに続き演算処理部52は、調整値検出用記憶領域に第2の調整値Qのデータが記憶されていると判断した場合には、前記計算式中の時間差D34に、調整値検出用記憶領域に記憶された第2の調整値Qのデータを代入して垂直角度φ12を算出する。最終的に演算処理部52は、垂直角度φ11と垂直角度φ12とを加算した結果を垂直角度φとして決定する。決定された垂直角度φも、水平角度θと同様に零度になる。このようにして本実施形態の画像表示装置1では、複数の選定周波数毎の音波が2つの超音波マイクロフォンM3、M4に到達する時間差D34をそれぞれ零にする調整が完了する。
【0049】
続いて演算処理部52は、画像表示制御プログラム記憶部56に記憶されたプログラムを実行して以下に説明するように、データ記憶部57から選択した円形の画像データに基づいて、各種の円形画像Z1〜Z4(図6参照。)等を各表示領域71、72に表示する処理を実行する。
【0050】
例えばスピーカ85からホワイトノイズを発生させている場合に、演算処理部52は、データ記憶部57から4つの選定周波数(ここでは4kHz〜22kHz)に対応付けされた4つの画像データ(ここでは互いに色が異なる円形の画像データ)を読み出す。その後演算処理部52は、読み出した4つの画像データに基づいて、水平角度θや垂直角度φの算出間隔(ここでは30回/秒)に合わせて1秒あたり画面を30回書き換えて、各表示領域71、72に円形画像Z1〜Z4を表示する。第1の調整値Pを用いて算出した水平角度θ、第2の調整値Qを用いて算出した垂直角度φはどちらも零度であるため、図6に示すように演算処理部52は、表示領域71の横方向において水平角度θが零度の位置で且つ表示領域71の縦方向において垂直角度φが零度の位置に、円形画像Z1〜Z4を重ねて表示する。このように本実施形態の画像表示装置1では、操作者が、表示領域71に表示された円形画像Z1等を目視で確認することで、各マイクロフォンM1〜M4によって検出した音波の信号の位相を一致させる調整が確実に行われたことを目で見て確認することが可能になる。加えて演算処理部52は、表示領域72の縦方向において選定周波数の値に対応する周波数表示位置にも、円形画像Z1〜Z4を表示する。また図示を省略したが演算処理部52は、CCDカメラ17からの撮像信号に基づいて生成した画像信号をディスプレイ70に送信することで、表示領域71に撮像画像を表示する。なお、演算処理部52は本発明の表示制御手段の一例である。
【0051】
仮に、各調整値P、Qを用いることなく各マイクロフォンM1〜M4の周波数毎の位相が異なるままの状態で水平角度θ、垂直角度φを算出すると、図4及び図5を用いて説明したように、実際には水平角度θや垂直角度φが零度であるにもかかわらず、演算処理部52は、水平角度θや垂直角度φとして一定の値を算出することになる。その結果演算表示部52は、例えば図7に示すように、算出した水平角度θや垂直角度φに基づいて、表示領域71内で実際にスピーカ85を配置した位置とは異なる位置に、円形画像Z1〜Z4を表示することになる。
【0052】
<実施形態1の効果>
本実施形態の画像表示装置1では、従来のような試験音波として所望の複数の周波数の音波を一つずつ発生させる度に、各周波数毎に各マイクロフォンM1〜M4によって検出した音波の信号の位相を一致させる調整値を一つずつ算出する場合とは異なり、演算処理部52は、調整値算出処理(S4)において、試験音波としてのホワイトノイズに含まれる各選定周波数毎の調整値(第1の調整値P、第2の調整値Q)を一括して算出できる。したがって、複数の選定周波数毎の調整値を効率的に算出できる。
【0053】
また演算処理部52は、調整値算出処理(S4)において、ホワイトノイズに含まれる各選定周波数毎の調整値を、2つの超音波マイクロフォンM1、M2を配置した水平方向における第1の調整値Pと、2つの超音波マイクロフォンM3、M4を配置した垂直方向における第2の調整値Qとに分けて効率的に算出できる。
【0054】
さらに演算処理部52は、比較的簡単な計算式(1)〜(3)を用いるだけで、第1の調整値P及び第2の調整値Qを容易に算出できる。
【0055】
加えて2つの超音波マイクロフォンM1、M2の水平間隔Lと2つの超音波マイクロフォンM3、M4の垂直間隔Lとを、スピーカ85が発するホワイトノイズに含まれる超音波の半波長未満に保つことで、4つの超音波マイクロフォンM1〜M4と向き合うスピーカ85から発する超音波の到来方向を検出し易くすることが可能になる。
【0056】
<実施形態2>
本発明の実施形態2を図8ないし図10を参照しつつ説明する。ここでは実施形態1と同一の構成は同一の符号を付しその説明を省略する。本実施形態の画像表示装置1A(図1参照。)では演算処理部52は、図3に示す初期設定処理(S1)において、キーボード51によって入力された後述の極座標系の水平角度θ1や垂直角度φ1の算出間隔(例えば30回/秒)、第1の調整値Rや第2の調整値Sの算出間隔(例えば30回/秒)に関するデータ等をデータ記憶部57に記憶する処理を実行する。
【0057】
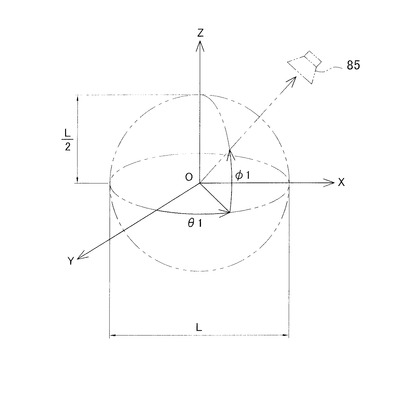
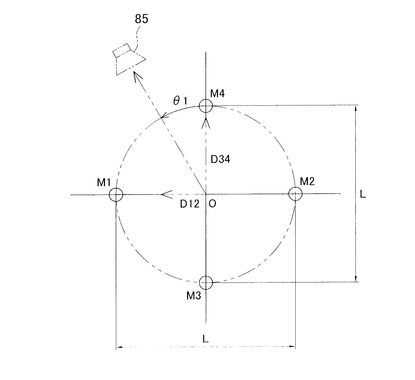
演算処理部52は、図3に示す調整値算出処理(S4)において、ディジタル信号演算処理プログラム記憶部54に記憶されたプログラムを用い以下に説明する手法によって選定周波数毎に、原点位置Oからの距離を前記水平間隔Lや前記垂直間隔L(いずれも0.7cm)の半分(L/2)とする極座標系(図8参照。)における前記原点位置Oからスピーカ85の配置位置への水平角度θ1(図8及び図9参照。)を一括して算出する処理を実行する。この水平角度θ1のデータはデータ記憶部57に記憶される。一例として図8には、各マイクロフォンM1〜M4の周波数毎の位相が異なることに起因して、実際にはスピーカ85の配置位置への水平角度θ1が零度であるにもかかわらず、原点位置Oから一定の水平角度θ1だけ傾けた方向にスピーカ85が配置されていると推定された状態を示した。
【0058】
水平角度θ1は、下記の式(F)を用いて算出される。なおD12は、スピーカ85から発せられたホワイトノイズに含まれる音波が2つの超音波マイクロフォンM1、M2に到達する時間差であり、D34は、前記音波が2つの超音波マイクロフォンM3、M4に到達する時間差である。
θ1=tan−1(D12/D34)[°]・・・(F)
【0059】
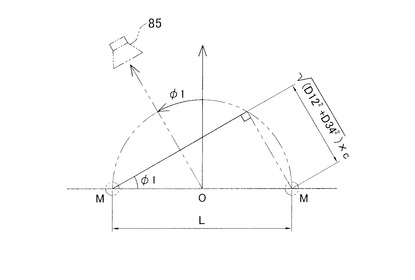
続いて演算処理部52は、調整値算出処理(S4)において、下記の式(G)及び式(6)を用いて極座標系(図8参照。)における原点位置Oからスピーカ85の配置位置への垂直角度φ1(図8及び図10参照。)を、複数の選定周波数に亘り一括して算出し、垂直角度φ1のデータをデータ記憶部57に記憶する処理を実行する。本実施形態では、図8に示す極座標系の球面が原点位置Oからの距離を同じくすることから、図10に示すように便宜的に前記球面上に仮想マイクMを配置することで垂直角度φ1を算出できると考えた。なお、cは音波の伝搬速度、Lは前記水平間隔及び前記垂直間隔、tは音波の伝搬経路の温度である。
φ1=sin−1{[√(D122+D342)]×c/L}[°]・・・(G)
c=334+0.6t[m/s]・・・(6)
【0060】
その後演算処理部52は、調整値算出処理(S4)において、上記の式(6)、下記の式(H)、式(I)を用いて複数の選定周波数毎の時間差D12及び時間差D34をそれぞれ一括して算出する。算出した各時間差D12、D34のデータはデータ記憶部57に記憶される。ここでは、式(H)中及び式(I)中の水平角度θ1として、演算処理部52が式(F)を用いて算出してデータ記憶部57に記憶させた水平角度θ1のデータを、式(I)中の垂直角度φ1として、演算処理部52が式(G)、式(6)を用いて算出してデータ記憶部57に記憶させた垂直角度φ1のデータを、それぞれ用いた。
D12=D34×tanθ1・・・(H)
D34=[L/c×sinφ1]/{√1+tan2θ1}・・・(I)
【0061】
さらに演算処理部52は、調整値算出処理(S4)において、データ記憶部57に記憶された各選定周波数毎の各時間差D12、D34のデータを読み出した上で各時間差D12、D34を零にするために、下記の式(4)、式(5)、上記の式(6)を用い、各マイクロフォンM1〜M4によつて検出した音波の信号の位相を一致させる各選定周波数毎の第1の調整値R、第2の調整値Sを一括して算出する。各調整値R、Sとしては、1秒間に算出した30個の調整値の平均値を採用した。算出した各調整値R、Sのデータはデータ記憶部57に記憶される。
R=−D12=−(D34×tanθ1)・・・(4)
S=−D34=−([L/c×sinφ1]/{√1+tan2θ1})・・・(5)
【0062】
本実施形態においても、演算処理部52は各表示領域71、72にホワイトノイズを発するスピーカ85の位置を識別する画像を表示する処理を実行可能である。この処理を開始する前に、画像表示装置1の操作者は、キーボード51を操作して、データ記憶部57に記憶されている各調整値R、Sのデータを、データ記憶部57の調整値検出用記憶領域に転送する。
【0063】
その後演算処理部52は、ディジタル信号演算処理プログラム記憶部54に記憶されたプログラムによって、複数の選定周波数毎の水平角度θ1、垂直角度φ1をそれぞれ算出する処理を実行する。ここではまず演算処理部52が、上記の式(F)と同様の計算式を用いて複数の選定周波数毎の水平角度θ21を、上記の式(G)及び式(6)と同様の各計算式を用いて複数の選定周波数毎の垂直角度φ21をそれぞれ算出する。
【0064】
これに続き、演算処理部52は、データ記憶部57の調整値検出用記憶領域に第1の調整値Rのデータが記憶されていると判断した場合に、下記の式(J)中の時間差D12に第1の調整値R、式(J)中の時間差D34に第2の調整値Sをそれぞれ代入して水平角度θ22を算出する。水平角度θ22の算出と共に、演算処理部52は、前記調整値検出用記憶領域に第2の調整値Sのデータが記憶されていると判断した場合に、上記の式(6)を用いると共に、下記の式(K)中の各時間差D12、D34に各調整値R、Sを代入して垂直角度φ22を算出する。
θ22=−{tan−1(D12/D34)}[°]・・・(J)
φ22=−(sin−1{[√(D122+D342)]×c/L})[°]・・・(K)
【0065】
そして演算処理部52は、水平角度θ21と水平角度θ22とを加算した結果を水平角度θ1として決定する。水平角度θ21と水平角度θ22とは同じ値で互いに符号が異なるものであることから、決定された水平角度θは零度になる。一方演算処理部52は、垂直角度φ21と垂直角度φ22とを加算した結果を垂直角度φ1として決定する。決定された垂直角度φ1も、水平角度θ1と同様に零度になる。その後演算処理部52は、図6を用いて説明した実施形態1と同様に、表示領域71の横方向において水平角度θ1が零度の位置で且つ表示領域71の縦方向において垂直角度φ1が零度の位置に、円形画像Z1ないしZ4を重ねて表示することが可能になる。
【0066】
<実施形態2の効果>
本実施形態の画像表示装置1Aでは、演算処理部52は、調整値算出処理(S4)において、ホワイトノイズに含まれる各選定周波数毎の調整値を、極座標系における原点位置Oからスピーカ85の配置位置への水平角度θ1に基づいて算出する第1の調整値Rと、前記極座標系における原点位置Oからスピーカ85の配置位置への垂直角度φ1に基づいて算出する第2の調整値Sとに分けて効率的に導出できる。
【0067】
また演算処理部52は、比較的簡単な計算式(4)〜(6)を用いるだけで、第1の調整値R及び第2に調整値Sを容易に算出できる。
【0068】
本発明は、上述した実施形態に限定されるものではなく、発明の趣旨を逸脱しない範囲内において構成の一部を適宜変更して実施できる。例えば上述した実施形態とは異なり、超音波マイクロフォンM1と超音波マイクロフォンM2との水平間隔や超音波マイクロフォンM3と超音波マイクロフォンM4との垂直間隔は、0.7cmに設定することに限らず、検出しようとする超音波の周波数に応じて適宜の値に変更してもよい。さらに、上述した実施形態とは異なり、画像表示装置は4つの超音波マイクロフォンM1〜M4を備えたものに限らず、例えば水平方向に互いに離れて配置された2つの超音波マイクロフォンのみを備えるものや、垂直方向に互いに離れて配置された2つのマイクロフォンのみを備えるものであってもよい。
【0069】
また上述した実施形態では、ホワイトノイズに含まれる音波を超音波マイクロフォンで検出する例を説明したが、超音波マイクロフォンに代えて、超音波周波数領域よりも低い周波数領域の音波を検出可能なマイクロフォンで、ホワイトノイズに含まれる音波を検出するようにしてもよい。
【0070】
加えて上述した実施形態では、操作者がキーボード51を操作して各調整値P〜Sをデータ記憶部57の調整値検出用記憶領域に転送する例を説明したが、これに代えて演算処理部52が、各調整値P〜Sを算出した後に自動的に調整値検出用記憶領域へ転送するようにしてもよい。さらに加えて上述した実施形態1では、一方のマイクロフォンで検出した音波の信号の位相を他方のマイクロフォンで検出した音波の信号の位相よりも遅らせるために用いる各調整値P、Qを算出する例を説明したが、これに代えて、一方のマイクロフォンで検出した音波の信号の位相を他方のマイクロフォンで検出した音波の信号の位相よりも進めるために用いる調整値を算出するようにしてもよい。また上述した実施形態1では、音波の伝搬経路の温度を考慮して各調整値P〜Sを算出する例を説明したが、音波の信号の位相差の調整に高い調整精度を要求する必要がない場合には、前記伝搬経路の温度を考慮しないで調整値を算出するようにしてもよい。
【符号の説明】
【0071】
1、1A・・画像表示装置、17・・CCDカメラ、51・・キーボード、52・・演算処理部、70・・ディスプレイ、80・・ホワイトノイズ発生器、85・・スピーカ、M1〜M4・・超音波マイクロフォン、θ・・4つの超音波マイクロフォンの原点位置から水平方向に対するスピーカの配置位置への水平角度、φ・・原点位置から垂直方向に対するスピーカの配置位置への垂直角度、θ1・・極座標系における原点位置からスピーカの配置位置への水平角度、φ1・・極座標系における原点位置からスピーカの配置位置への垂直角度。
【特許請求の範囲】
【請求項1】
カメラによって撮像した撮像画像を表示する表示手段と、所定間隔を隔てて配置されて音源が発する音波を検出する少なくとも2つのマイクロフォンを有するマイクロフォン群と、前記音波が前記マイクロフォン群に到達する時間差に基づいて、前記音源の位置を算出する音源位置算出手段と、前記表示手段に表示された前記撮像画像内に、前記音源の位置を識別する画像を表示する制御を行う表示制御手段と、を備えた画像表示装置において、
前記少なくとも2つのマイクロフォンから等距離だけ離れた位置に配置して、前記音波として、異なる複数の周波数の音波を含むホワイトノイズを発する試験音波発生手段と、
前記音源位置算出手段によって算出した前記試験音波発生手段の位置に基づいて、前記異なる複数の周波数の音波が前記マイクロフォン群に到達する時間差を、各周波数毎に算出して、該時間差を零にするように前記マイクロフォン群によって検出した前記異なる複数の周波数の音波の信号の位相を一致させる前記各周波数毎の調整値を、一括して算出する調整値算出手段と、
を有することを特徴とする画像表示装置。
【請求項2】
前記マイクロフォン群は、水平方向において前記所定間隔を隔てて配置された前記2つのマイクロフォンからなる第1のマイクロフォン群と、前記水平方向と交差する垂直方向において前記所定間隔を隔てて配置された他の前記2つのマイクロフォンからなる第2のマイクロフォン群と、を備え、
前記第1のマイクロフォン群及び前記第2のマイクロフォン群によって検出した前記音波の伝搬速度を補正する補正温度を設定する補正温度設定手段を有し、
前記2つのマイクロフォン同士を結ぶ直線と前記他の2つのマイクロフォン同士を結ぶ直線との交点を原点として、前記試験音波発生手段は、前記原点を通る直線上で各マイクロフォンから等距離だけ離れた位置に配置され、
前記音源位置算出手段は、前記異なる複数の周波数の音波が前記第1のマイクロフォン群に到達する時間差及び前記補正温度設定手段によって設定した前記補正温度に基づいて、前記原点から前記水平方向に対する前記試験音波発生手段への水平角を算出すると共に、前記異なる複数の周波数の音波が前記第2のマイクロフォン群に到達する時間差及び前記補正温度に基づいて、前記原点から前記垂直方向に対する前記試験音波発生手段への垂直角を算出して、前記水平角及び前記垂直角から前記試験音波発生手段の位置を算出し、
前記調整値算出手段は、前記音源位置算出手段によって算出した前記水平角に基づいて、前記異なる複数の周波数の音波が前記第1のマイクロフォン群に到達する時間差を、各周波数毎に算出して、該時間差を零にするように前記第1のマイクロフォン群によって検出した前記異なる複数の周波数の音波の信号の位相を一致させる各周波数毎の第1の調整値を、一括して算出すると共に、前記音源位置算出手段によって算出した前記垂直角に基づいて、前記異なる複数の周波数の音波が前記第2のマイクロフォン群に到達する時間差を、各周波数毎に算出して、該時間差を零にするように前記第2のマイクロフォン群によって検出した前記異なる複数の周波数の音波の信号の位相を一致させる各周波数毎の第2の調整値を、一括して算出することを特徴とする請求項1に記載の画像表示装置。
【請求項3】
前記調整値算出手段は、式(1)及び式(2)によって、前記各周波数毎の前記第1の調整値を、式(2)及び式(3)によって、前記各周波数毎の前記第2の調整値をそれぞれ一括して算出することを特徴とする請求項2に記載の画像表示装置。
P=−D12=−(L/c×sinθ)・・・(1)
c=334+0.6t・・・(2)
Q=−D34=−(L/c×sinφ)・・・(3)
なおPは前記第1の調整値であり、Qは前記第2の調整値である。またD12は前記音波が前記第1のマイクロフォン群に到達する時間差であり、D34は前記音波が前記第2のマイクロフォン群に到達する時間差である。さらにθは前記水平角であり、φは前記垂直角である。加えてcは前記音波の伝搬速度であり、tは前記補正温度である。さらに加えてLは、前記水平方向での前記2つのマイクロフォンの前記所定間隔及び前記垂直方向での前記他の2つのマイクロフォンの前記所定間隔である。
【請求項4】
前記マイクロフォン群は、水平方向において所定間隔を隔てて配置された前記2つのマイクロフォンからなる第1のマイクロフォン群と、前記水平方向と交差する垂直方向において前記所定間隔を隔てて配置された他の前記2つのマイクロフォンからなる第2のマイクロフォン群と、を備え、
前記第1のマイクロフォン群及び前記第2のマイクロフォン群によって検出した前記音波の伝搬速度を補正する補正温度を設定する補正温度設定手段を有し、
前記2つのマイクロフォン同士を結ぶ直線と前記他の2つのマイクロフォン同士を結ぶ直線との交点を原点として、前記試験音波発生手段は、前記原点を通る直線上で各マイクロフォンから等距離だけ離れた位置に配置され、
前記音源位置算出手段は、前記異なる複数の周波数の音波が前記第1のマイクロフォン群に到達する時間差に基づいて、前記原点からの距離を前記所定間隔の半分とする極座標系における前記原点から前記試験音波発生手段への水平角を算出すると共に、前記異なる複数の周波数の音波が前記第2のマイクロフォン群に到達する時間差及び前記補正温度設定手段によって設定した前記補正温度に基づいて、前記極座標系における前記原点から前記試験音波発生手段への垂直角を算出して、前記水平角及び前記垂直角から前記試験音波発生手段の位置を算出し、
前記調整値算出手段は、前記音源位置算出手段によって算出した前記極座標系における前記水平角に基づいて、前記異なる複数の周波数の音波が前記第1のマイクロフォン群に到達する時間差を、各周波数毎に算出して、該時間差を零にするように前記第1のマイクロフォン群によって検出した前記異なる複数の周波数の音波の信号の位相を一致させる各周波数毎の第1の調整値を、一括して算出すると共に、前記音源位置算出手段によって算出した前記極座標系における前記垂直角に基づいて、前記異なる複数の周波数の音波が前記第2のマイクロフォン群に到達する時間差を、各周波数毎に算出して、該時間差を零にするように前記第2のマイクロフォン群によって検出した前記異なる複数の周波数の音波の信号の位相を一致させる各周波数毎の第2の調整値を、一括して算出することを特徴とする請求項1に記載の画像表示装置。
【請求項5】
前記調整値算出手段は、式(4)ないし式(6)によって、前記各周波数毎の前記第1の調整値を、式(5)及び式(6)によって、前記各周波数毎の前記第2の調整値をそれぞれ一括して算出することを特徴とする請求項4に記載の画像表示装置。
R=−D12=−(D34×tanθ1)・・・(4)
S=−D34=−([L/c×sinφ1]/{√1+tan2θ1})・・・(5)
c=334+0.6t・・・(6)
なおRは前記第1の調整値であり、Sは前記第2の調整値である。またD12は前記音波が前記第1のマイクロフォン群に到達する時間差であり、D34は前記音波が前記第2のマイクロフォン群に到達する時間差である。さらにθ1は前記極座標系における前記水平角であり、φ1は前記極座標系における前記垂直角である。加えてcは前記音波の伝搬速度であり、tは前記補正温度である。さらに加えてLは、前記水平方向での前記2つのマイクロフォンの前記所定間隔及び前記垂直方向での前記他の2つのマイクロフォンの前記所定間隔である。
【請求項6】
前記少なくとも2つのマイクロフォンを、超音波マイクロフォンとして、
前記所定間隔を、前記音源が発する超音波の半波長未満にして、
前記試験音波発生手段は、前記超音波を含む前記ホワイトノイズを発することを特徴とする請求項1ないし5のいずれかに記載の画像表示装置。
【請求項7】
カメラによって撮像した撮像画像を表示手段に表示するステップと、音源が発する音波が、所定間隔を隔てて配置されて前記音波を検出する少なくとも2つのマイクロフォンを有するマイクロフォン群に到達する時間差に基づいて、前記音源の位置を算出するステップと、前記表示手段に表示された前記撮像画像内に、前記音源の位置を識別する画像を表示する制御を行うステップと、を備えた画像表示装置におけるマイクロフォンの調整方法において、
異なる複数の周波数の音波を含むホワイトノイズを発する試験音波発生手段を用いて、前記少なくとも2つのマイクロフォンから等距離だけ離れた位置から前記ホワイトノイズを発生させる試験音波発生ステップと、
前記試験音波発生手段の位置を算出する位置算出ステップと、
前記位置算出ステップによって算出した前記試験音波発生手段の位置に基づいて、前記異なる複数の周波数の音波が前記マイクロフォン群に到達する時間差を、各周波数毎に算出して、該時間差を零にするように前記マイクロフォン群によって検出した前記異なる複数の周波数の音波の信号の位相を一致させる前記各周波数毎の調整値を、一括して算出する調整値算出ステップと、
前記調整値算出ステップによって算出した前記調整値に基づいて、前記音源の位置を算出するステップを実行する前に、予め前記異なる複数の周波数毎の前記時間差を零にする調整ステップと、
を実行することを特徴とする画像表示装置におけるマイクロフォンの調整方法。
【請求項1】
カメラによって撮像した撮像画像を表示する表示手段と、所定間隔を隔てて配置されて音源が発する音波を検出する少なくとも2つのマイクロフォンを有するマイクロフォン群と、前記音波が前記マイクロフォン群に到達する時間差に基づいて、前記音源の位置を算出する音源位置算出手段と、前記表示手段に表示された前記撮像画像内に、前記音源の位置を識別する画像を表示する制御を行う表示制御手段と、を備えた画像表示装置において、
前記少なくとも2つのマイクロフォンから等距離だけ離れた位置に配置して、前記音波として、異なる複数の周波数の音波を含むホワイトノイズを発する試験音波発生手段と、
前記音源位置算出手段によって算出した前記試験音波発生手段の位置に基づいて、前記異なる複数の周波数の音波が前記マイクロフォン群に到達する時間差を、各周波数毎に算出して、該時間差を零にするように前記マイクロフォン群によって検出した前記異なる複数の周波数の音波の信号の位相を一致させる前記各周波数毎の調整値を、一括して算出する調整値算出手段と、
を有することを特徴とする画像表示装置。
【請求項2】
前記マイクロフォン群は、水平方向において前記所定間隔を隔てて配置された前記2つのマイクロフォンからなる第1のマイクロフォン群と、前記水平方向と交差する垂直方向において前記所定間隔を隔てて配置された他の前記2つのマイクロフォンからなる第2のマイクロフォン群と、を備え、
前記第1のマイクロフォン群及び前記第2のマイクロフォン群によって検出した前記音波の伝搬速度を補正する補正温度を設定する補正温度設定手段を有し、
前記2つのマイクロフォン同士を結ぶ直線と前記他の2つのマイクロフォン同士を結ぶ直線との交点を原点として、前記試験音波発生手段は、前記原点を通る直線上で各マイクロフォンから等距離だけ離れた位置に配置され、
前記音源位置算出手段は、前記異なる複数の周波数の音波が前記第1のマイクロフォン群に到達する時間差及び前記補正温度設定手段によって設定した前記補正温度に基づいて、前記原点から前記水平方向に対する前記試験音波発生手段への水平角を算出すると共に、前記異なる複数の周波数の音波が前記第2のマイクロフォン群に到達する時間差及び前記補正温度に基づいて、前記原点から前記垂直方向に対する前記試験音波発生手段への垂直角を算出して、前記水平角及び前記垂直角から前記試験音波発生手段の位置を算出し、
前記調整値算出手段は、前記音源位置算出手段によって算出した前記水平角に基づいて、前記異なる複数の周波数の音波が前記第1のマイクロフォン群に到達する時間差を、各周波数毎に算出して、該時間差を零にするように前記第1のマイクロフォン群によって検出した前記異なる複数の周波数の音波の信号の位相を一致させる各周波数毎の第1の調整値を、一括して算出すると共に、前記音源位置算出手段によって算出した前記垂直角に基づいて、前記異なる複数の周波数の音波が前記第2のマイクロフォン群に到達する時間差を、各周波数毎に算出して、該時間差を零にするように前記第2のマイクロフォン群によって検出した前記異なる複数の周波数の音波の信号の位相を一致させる各周波数毎の第2の調整値を、一括して算出することを特徴とする請求項1に記載の画像表示装置。
【請求項3】
前記調整値算出手段は、式(1)及び式(2)によって、前記各周波数毎の前記第1の調整値を、式(2)及び式(3)によって、前記各周波数毎の前記第2の調整値をそれぞれ一括して算出することを特徴とする請求項2に記載の画像表示装置。
P=−D12=−(L/c×sinθ)・・・(1)
c=334+0.6t・・・(2)
Q=−D34=−(L/c×sinφ)・・・(3)
なおPは前記第1の調整値であり、Qは前記第2の調整値である。またD12は前記音波が前記第1のマイクロフォン群に到達する時間差であり、D34は前記音波が前記第2のマイクロフォン群に到達する時間差である。さらにθは前記水平角であり、φは前記垂直角である。加えてcは前記音波の伝搬速度であり、tは前記補正温度である。さらに加えてLは、前記水平方向での前記2つのマイクロフォンの前記所定間隔及び前記垂直方向での前記他の2つのマイクロフォンの前記所定間隔である。
【請求項4】
前記マイクロフォン群は、水平方向において所定間隔を隔てて配置された前記2つのマイクロフォンからなる第1のマイクロフォン群と、前記水平方向と交差する垂直方向において前記所定間隔を隔てて配置された他の前記2つのマイクロフォンからなる第2のマイクロフォン群と、を備え、
前記第1のマイクロフォン群及び前記第2のマイクロフォン群によって検出した前記音波の伝搬速度を補正する補正温度を設定する補正温度設定手段を有し、
前記2つのマイクロフォン同士を結ぶ直線と前記他の2つのマイクロフォン同士を結ぶ直線との交点を原点として、前記試験音波発生手段は、前記原点を通る直線上で各マイクロフォンから等距離だけ離れた位置に配置され、
前記音源位置算出手段は、前記異なる複数の周波数の音波が前記第1のマイクロフォン群に到達する時間差に基づいて、前記原点からの距離を前記所定間隔の半分とする極座標系における前記原点から前記試験音波発生手段への水平角を算出すると共に、前記異なる複数の周波数の音波が前記第2のマイクロフォン群に到達する時間差及び前記補正温度設定手段によって設定した前記補正温度に基づいて、前記極座標系における前記原点から前記試験音波発生手段への垂直角を算出して、前記水平角及び前記垂直角から前記試験音波発生手段の位置を算出し、
前記調整値算出手段は、前記音源位置算出手段によって算出した前記極座標系における前記水平角に基づいて、前記異なる複数の周波数の音波が前記第1のマイクロフォン群に到達する時間差を、各周波数毎に算出して、該時間差を零にするように前記第1のマイクロフォン群によって検出した前記異なる複数の周波数の音波の信号の位相を一致させる各周波数毎の第1の調整値を、一括して算出すると共に、前記音源位置算出手段によって算出した前記極座標系における前記垂直角に基づいて、前記異なる複数の周波数の音波が前記第2のマイクロフォン群に到達する時間差を、各周波数毎に算出して、該時間差を零にするように前記第2のマイクロフォン群によって検出した前記異なる複数の周波数の音波の信号の位相を一致させる各周波数毎の第2の調整値を、一括して算出することを特徴とする請求項1に記載の画像表示装置。
【請求項5】
前記調整値算出手段は、式(4)ないし式(6)によって、前記各周波数毎の前記第1の調整値を、式(5)及び式(6)によって、前記各周波数毎の前記第2の調整値をそれぞれ一括して算出することを特徴とする請求項4に記載の画像表示装置。
R=−D12=−(D34×tanθ1)・・・(4)
S=−D34=−([L/c×sinφ1]/{√1+tan2θ1})・・・(5)
c=334+0.6t・・・(6)
なおRは前記第1の調整値であり、Sは前記第2の調整値である。またD12は前記音波が前記第1のマイクロフォン群に到達する時間差であり、D34は前記音波が前記第2のマイクロフォン群に到達する時間差である。さらにθ1は前記極座標系における前記水平角であり、φ1は前記極座標系における前記垂直角である。加えてcは前記音波の伝搬速度であり、tは前記補正温度である。さらに加えてLは、前記水平方向での前記2つのマイクロフォンの前記所定間隔及び前記垂直方向での前記他の2つのマイクロフォンの前記所定間隔である。
【請求項6】
前記少なくとも2つのマイクロフォンを、超音波マイクロフォンとして、
前記所定間隔を、前記音源が発する超音波の半波長未満にして、
前記試験音波発生手段は、前記超音波を含む前記ホワイトノイズを発することを特徴とする請求項1ないし5のいずれかに記載の画像表示装置。
【請求項7】
カメラによって撮像した撮像画像を表示手段に表示するステップと、音源が発する音波が、所定間隔を隔てて配置されて前記音波を検出する少なくとも2つのマイクロフォンを有するマイクロフォン群に到達する時間差に基づいて、前記音源の位置を算出するステップと、前記表示手段に表示された前記撮像画像内に、前記音源の位置を識別する画像を表示する制御を行うステップと、を備えた画像表示装置におけるマイクロフォンの調整方法において、
異なる複数の周波数の音波を含むホワイトノイズを発する試験音波発生手段を用いて、前記少なくとも2つのマイクロフォンから等距離だけ離れた位置から前記ホワイトノイズを発生させる試験音波発生ステップと、
前記試験音波発生手段の位置を算出する位置算出ステップと、
前記位置算出ステップによって算出した前記試験音波発生手段の位置に基づいて、前記異なる複数の周波数の音波が前記マイクロフォン群に到達する時間差を、各周波数毎に算出して、該時間差を零にするように前記マイクロフォン群によって検出した前記異なる複数の周波数の音波の信号の位相を一致させる前記各周波数毎の調整値を、一括して算出する調整値算出ステップと、
前記調整値算出ステップによって算出した前記調整値に基づいて、前記音源の位置を算出するステップを実行する前に、予め前記異なる複数の周波数毎の前記時間差を零にする調整ステップと、
を実行することを特徴とする画像表示装置におけるマイクロフォンの調整方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【公開番号】特開2013−90289(P2013−90289A)
【公開日】平成25年5月13日(2013.5.13)
【国際特許分類】
【出願番号】特願2011−232108(P2011−232108)
【出願日】平成23年10月21日(2011.10.21)
【出願人】(000213297)中部電力株式会社 (811)
【Fターム(参考)】
【公開日】平成25年5月13日(2013.5.13)
【国際特許分類】
【出願日】平成23年10月21日(2011.10.21)
【出願人】(000213297)中部電力株式会社 (811)
【Fターム(参考)】
[ Back to top ]