
画像表示装置

【課題】 ユーザの目の負担を軽減した3次元画像を表示可能な「画像表示装置」を提供する。
【解決手段】 本発明の画像表示装置は、2次元表示または3次元表示を行うことができる表示手段と、車両が停止状態から走行状態に移行する否かを判定する判定手段と、停止状態から走行状態に移行すると判定されたとき、3次元表示から2次元表示に切替わるように表示手段を制御する制御手段とを有する。好ましくは、交差点における信号機の動作情報を外部から受信し、判定手段は、信号機が赤信号から青信号に変化するまでの待時間情報に基づき停止状態から走行状態に移行すると判定する。これにより、走行開始より一定時間前に3次元表示を終了させることができる。
【解決手段】 本発明の画像表示装置は、2次元表示または3次元表示を行うことができる表示手段と、車両が停止状態から走行状態に移行する否かを判定する判定手段と、停止状態から走行状態に移行すると判定されたとき、3次元表示から2次元表示に切替わるように表示手段を制御する制御手段とを有する。好ましくは、交差点における信号機の動作情報を外部から受信し、判定手段は、信号機が赤信号から青信号に変化するまでの待時間情報に基づき停止状態から走行状態に移行すると判定する。これにより、走行開始より一定時間前に3次元表示を終了させることができる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、裸眼による3次元画像を選択的に表示可能な画像表示装置に関し、特に、車載に搭載される画像表示装置に関する。
【背景技術】
【0002】
自動車等の移動体には、ナビゲーション画像、テレビ画像、インターネット画像、DVD画像などを表示する表示装置が搭載され、運転に必要な情報を与えたり、搭乗者にエンターテイメントな情報を提供している。車載用表示装置は、通常、車内空間のフロントに設置されるが、走行中に運転者がナビゲーション画像以外の画像を見ることは、安全運転上好ましいことではない。このため、運転者によって視認できる画像と助手席の搭乗者によって視認できる画像とを別々に表示する表示装置が特許文献1に開示されている。
【0003】
また、近年では、ゲーム機器などにおいて3次元画像を表示する技術が普及しつつある。3次元表示は、視差を利用する方式が一般的である。例えば、特許文献2は、立体画像の表示や複数の画像の同時表示が可能な液晶表示装置を搭載するカーナビゲーション装置を開示している。図1は、特許文献2の立体画像を表示する液晶表示装置の構成を示す図である。液晶表示装置は、第1および第2の光源1a、1bと、導光板2と、両面プリズムシート3と、透過型表示パネル4とを含み、第1の光源1aからの光は、導光板2の入射端面2aから入射され、第2の光源1bからの光は、導光板2の入射端面2bから入射され、導光板2内で繰り返し反射された光は、その出射面2cから両面プリズムシート3に入射される。両面プリズムシート3の入射面には三角形状プリズム列3aが形成され、出射面には円筒状レンズ列3bが形成され、光源1a、1bから発せられた光は、それぞれ左右の視差に対応する角度で透過型表示パネル4から出射され、左右方向に異なる画像を表示したり、立体画像の表示を可能にしている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2005−165228号公報
【特許文献2】特開2005−266293号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
3次元表示は、リアルな映像、インパクトのある映像を提供することができるため、映画、ショッピングや広告の映像に利用されることが予想される。3次元表示には、専用の3Dメガネを用いるものと、視差を利用した裸眼によるものがある。裸眼による3次元表示は、ユーザにとって煩わしさがなく快適である反面、ユーザの目に負荷または負担が生じる。このため、3次元画像を表示する表示装置を車載機に用いた場合には、3次元表示から2次元表示に切替える際に、運転者または搭乗者の目の負担が最小限に軽減されることが望ましい。さらに、運転者または搭乗者が3次元表示の仮想社会から現実社会を見るときの目の負荷を最小限にすることも望まれる。特に、長時間、3次元表示を見ていた場合には、現実社会を見るための慣らしが必要である。
【0006】
本発明は、上記従来の課題を解決し、ユーザの目の負担を軽減した3次元画像を表示可能な画像表示装置を提供することを目的とする。
【課題を解決するための手段】
【0007】
本発明に係る、車両に搭載可能な画像表示装置は、2次元表示または3次元表示を行うことができる表示手段と、車両が停止状態から走行状態に移行する否かを判定する判定手段と、前記判定手段により停止状態から走行状態に移行すると判定されたとき、3次元表示から2次元表示に切替わるように前記表示手段を制御する制御手段とを有する。
【0008】
好ましくは画像表示装置はさらに、外部からの情報を受信する受信手段を含み、前記判定手段は、前記受信手段で受信した情報に基づき停止状態から走行状態に移行すると判定する。好ましくは前記外部からの情報は、交差点における信号機の動作情報を含み、前記判定手段は、信号機が赤信号から青信号に変化するまでの待時間情報に基づき停止状態から走行状態に移行すると判定する。好ましくは前記判定手段は、赤信号から青信号に変化する一定時間前に、停止状態から走行状態に移行すると判定する。好ましくは前記外部からの情報は、渋滞車列における前方車両の移動情報を含み、前記判定手段は、前記移動情報に基づき停止状態から走行状態に移行すると判定する。好ましくは前記制御手段は、3次元表示から2次元表示、または2次元表示から3次元表示への段階的な切替を制御する。
【0009】
本発明に係る、車両に搭載可能な画像表示装置は、2次元表示または3次元表示を行うことができる表示手段と、目的地に到着したか否かを判定する判定手段と、前記表示手段を制御する制御手段とを有し、前記制御手段は、走行中に運転者以外の搭乗者向けの画像を3次元表示させている場合に、前記判定手段により目的地に到着すると判定されたとき、3次元表示から2次元表示に切替える。好ましくは前記表示手段は、視差バリアを利用した裸眼による3次元表示が可能である。
【0010】
本発明に係るプログラムは、2次元表示または3次元表示を行うことができる表示手段を備えた画像表示装置により実行されるものであって、車両が停止状態から走行状態に移行する否かを判定するステップと、停止状態から走行状態に移行すると判定されたとき、3次元表示から2次元表示に切替わるように前記表示手段を制御するステップとを有する。
【発明の効果】
【0011】
本発明によれば、停止状態から走行状態に移行すると判定された場合に、3次元表示から2次元表示に切替えるようにしたので、ユーザは、現実社会を見る前に目を慣らすことができ、目の負担を軽減することができる。特に、走行開始前に3次元表示を終了させることで、3次元表示から現実社会への目または脳の切替を促進させ、安全運転を担保することができる。
【図面の簡単な説明】
【0012】
【図1】従来の立体画像を表示可能な車両に搭載される画像表示装置の構成を示す図である。
【図2】本発明の好ましい実施形態に係る画像表示装置の構成を示すブロック図である。
【図3】図2に示す表示部の構成例を示す断面図。
【図4A】本発明の第1の実施例に係る画像表示装置の構成を示すブロック図である。
【図4B】本発明の第5の実施例に係る画像表示装置の構成を示すブロック図である。
【図5】本発明の第1の実施例に係る表示切替動作を説明するフローチャートである。
【図6】本発明の第1ないし第4の実施例の表示切替タイミングを示す図である。
【図7】本発明の第3の実施例に係る表示切替を説明する図である。
【図8】本発明の第4の実施例に係る表示切替動作を説明するフローチャートである。
【図9】本発明の第5の実施例に係る表示切替動作を説明するフローチャートである。
【図10】本発明の第6の実施例の構成を示すブロック図である。
【図11】本発明の第6の実施例に係る表示切替動作を説明するフローチャートである。
【図12】本発明の画像表示装置を適用した電子装置の構成例を示す図である。
【発明を実施するための形態】
【0013】
次に、本発明の実施の形態について説明する。本発明の実施の形態に係る画像表示装置は、好ましくは車両等の移動体に搭載され、移動体の空間内において裸眼による3次元表示または立体表示を行う。また、画像表示装置は、移動体に搭載される他の電子機器、例えば、ナビゲーション装置、オーディオ・ビデオ装置、テレビ受信機、および情報端末装置の画像表示媒体として利用される。
【0014】
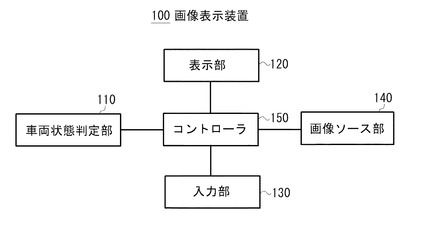
図2は、本発明の好適な実施形態に係る画像表示装置の構成を示すブロック図である。本実施形態に係る画像表示装置100は、車両の状態を判定する車両状態判定部110と、2次元表示または3次元表示を行うことができる表示部120と、ユーザからの入力を受け取る入力部130と、表示部120に表示される画像データを供給する画像ソース部140と、各部を制御するコントローラ150とを含んで構成される。
【0015】
車両状態判定部110は、自車が走行状態から停止状態に移行するか否か、その反対に停止状態から走行状態に移行するか否か、あるいは自車前方の車両が停止しているか否か等を判定する。車両状態判定部110は、例えば、車両に搭載されている車速センサ、パーキングブレーキのオンまたはオフなどの車両の状態を表す情報を利用したり、外部から取得した道路交通情報を利用したり、撮像カメラやミリ波レーダーによる検出情報を利用することができる。さらに、ナビゲーション装置に含まれる道路地図データなども利用することもできる。
【0016】
好ましい態様では、車両状態判定部110は、自車が交差点で停止しているとき、外部から受信した信号機の動作情報に基づき自車が停止状態から走行状態に移行するタイミングを判定する。他の好ましい態様では、車両状態判定部110は、自車が渋滞で停止しているとき、外部から受信した渋滞情報に基づき自車が停止状態から走行状態に移行するタイミングを判定する。さらに好ましい態様では、車両状態判定部110は、ミリ波レーダー、赤外線、撮像カメラ等の障害物検出部からの検出情報に基づき自車が停止状態から走行状態に移行するタイミングと判定する。
【0017】
表示部120は、画像ソース部140から供給された画像を2次元表示または3次元表示することができる。好ましい実施形態では、表示部120は、裸眼による3次元表示を可能にする。人間が映像を立体的に認識するのは、左右の目に映像の違い(両眼視差)を脳が処理して、奥行きを認識する。つまり、右目用の映像を右目にだけ届け、左目用の映像を左目だけに届けることで立体表示を行うことができる。
【0018】
裸眼による3次元表示は、公知のように、インテグラルイメージング方式と視差バリア方式が知られている。インテグラルイメージング方式は、微細なレンズが無数に並べられたレンチキュラーシートの背後に液晶パネルを配置するものである。視差バリア方式は、微細な縦縞状の遮光物(液晶シャッターなど)をパネルに配置することで左右の目に異なる映像を届けるものである。遮光物を構成する液晶シャッターをスイッチングすることで、3次元表示と2次元表示の切替えを容易に実現することができる。
【0019】
図3は、表示部120を構成する視差バリア方式の液晶パネルの一例を示している。液晶パネル200は、光源となるバックライト装置からの直線偏光を通過させる偏光板202と、TFT基板(アクティブ薄膜トランジスタ基板)204と、液晶層206と、カラーフィルター基板208と、視差バリア210と、ガラス基板212と、偏光板214とを含んで構成される。
【0020】
バックライト装置からの光は、偏光板202によって特定の直線偏光の光のみが透過され、透過された光は、TFT基板204のトランジスタによって駆動された液晶層206によって変調され、カラーフィルター基板208に入射される。カラーフィルター基板208は、RGB(赤、緑、青)の三原色のカラーフィルターを配列し、RGBによって1つの画素が形成される。視差バリア210は、カラーフィルター基板208上に配置されたパネルであり、光を遮断する遮光部210aと光を透過する透光部210bとを有する。遮光部210aと透光部210bとは一列置きに交互に複数配列され、遮光部210aと透光部210bのピッチは、カラーフィルターのR、G、Gの配列ピッチに対応する。それぞれの透光部210bからは、観察者の右目方向のR、G、Bの光が視野方向V1に出射され、同時に、左目方向のR、G、Bの光が視野方向V2に出射される。視野バリア210は、液晶から構成され、遮光部210aに対応する電極に電圧を印加することで、遮光部210aが光を遮光するオン状態、または光を透光させるオフ状態に切替えることができる。遮光部210aの切替は、コントローラ150からの切替制御信号によって成され、表示部120に3次元画像を表示させる場合には、遮光部210aが遮光状態となり、2次元画像を表示させる場合には、遮光部210aが透光状態となる。
【0021】
入力部130は、ユーザと画像表示装置100との間のユーザインターフェースを構成する。入力部130は、例えば、表示すべき画像ソースの選択の指示、2次元表示または3次元表示の切替などの指示などをユーザから受け取ることができる。
【0022】
画像ソース部140は、表示部120において表示される画像データを提供し、あるいは生成する。画像ソース部140は、入力部130からのユーザ選択に応じて、例えば、自車位置周辺の道路地図であるナビゲーション画像、DVD等の記憶媒体から再生された画像、またはテレビ放送により受信した画像などを提供する。また、画像ソース部140は、コントローラ150から3次元表示をする旨の指示が与えられた場合には、3次元表示のための画像、つまり、視差に応じた観察者の右目用画像と左目用画像を生成することができる。
【0023】
コントローラ150は、例えば、中央処理装置、中央処理プロセッサ、マイクロコンピュータ、マイクロプロセッサ、あるいは処理プロセッサなどの制御装置を用いて構成される。好ましくは、コントローラ150は、3次元表示または2次元表示の切替を行うための表示切替プログラムをメモリに記憶し、当該プログラムを実行することで、表示部120および画像ソース部140を制御する。
【実施例】
【0024】
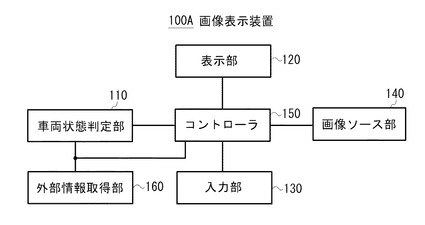
次に、本実施例の画像表示装置の第1の実施例について説明する。図4は、第1の実施例に係る画像表示装置100Aの構成を示し、図2と同一構成については同一番号を付す。第1の実施例では、画像表示装置100Aは、自車の外部から道路交通に関する情報を取得する外部情報取得部160を含む。外部情報取得部160は、安全運転支援システム(DSSS: driving safety support systems)に代表されるような、光ビーコンや無線による通信を用いてリアルタイムな道路交通情報を取得する。DSSSでは、交差点や主要な道路に配置された光ビーコンを利用し、そこを通過する車両にリアルタイムな道路交通情報を与える。例えば、交差点に進入する車両に対して、前方に信号機があること、その信号機が赤信号または青信号であるとと、赤信号である場合に青信号に変わるまでの待時間などの情報を提供する。また、前方の渋滞車列に突入する車両に対して、渋滞車列までの距離、渋滞車列の前方が移動を開始したか否かの情報などを提供する。外部情報取得手段160は、DSSS以外にも、例えば、VICS、DSRC、スマートウエイ、インターネットなどから情報を取得しこれを解読するものであってもよい。
【0025】
車両状態判定部110は、外部情報取得部160で取得された情報に基づき、車両が走行中かまたは停止中か、車両が停止状態から走行状態に移行するか否か、あるいは、車両が走行状態から停止状態に移行するか否か等を目的に応じてを判定する。この判定結果は、コントローラ150へ提供され、コントローラ150は、この情報に基づき3次元表示または2次元表示の切替を行う。
【0026】
図5は、第1の実施例に係る画像表示装置の表示切替を説明するフローチャートである。ここでは、運転者用の画像を表示することを前提とする。画像表示装置100Aは、ユーザにより選択された画像を画像ソース部140から出力させ、これを表示部120に表示させるが、走行中は、運転者に3次元画像を見せることは危険であるため、2次元画像を表示させる(S101)。車両状態判定部150は、車速センサなどの情報を用いて自車が走行中であるか否かを判定する。コントローラ150は、自車が走行中である間、切替制御信号を介して視野バリア210の遮光部210aをオフさせ(言い換えれば、透光状態にし)、表示部120が2次元画像を表示できるようにする。また、画像ソース部140からは通常の画像データが表示部120へ提供される。
【0027】
自車が交差点近傍を通過すると、外部情報取得部160は、交差点手前に設置された光ビーコンから信号機の動作情報を受信する(S102)。信号機の動作情報は、前方の交差点に信号機が存在すること、信号機の状態(赤信号、青信号、右折信号など)、赤信号であるときの待時間(赤信号から青信号に変化するまでの時間)などである。外部情報取得部160は、受信した動作情報を一時保持し、当該動作情報を解読し(S103)、その解読結果を車両状態判定部110へ提供する。
【0028】
次に、車両状態判定部110は、動作情報を受け取り、交差点の信号が赤信号であるか否かを判定し(S104)、赤信号である場合には、赤信号の待時間または青信号になるまでの残時間をカウントダウンする(S105)。例えば、赤信号の待時間が1分20秒であるならば、車両状態判定部110は、内蔵するタイマーなどを用いて、1分20秒を1秒単位でカウントダウンする。
【0029】
次に、車両状態判定部150は、自車が停止したか否かを判定する(S106)。停止したか否かは、例えば、車速センサなどを利用して行うことができる。自車が停止したと判定されると、コントローラ150は、2次元表示から3次元表示に表示を切替える(S107)。すなわち、画像ソース部140は、選択されている画像を左目用画像と右目用画像に2分割し、これを表示部120へ提供する。また、視野バリア210の遮光部210aは、コントローラ150からの切替制御信号により遮光状態とされる。こうして、自車が停止すると、表示部120には立体画像が表示され、運転者は、裸眼で立体画像を見ることができる。
【0030】
また、車両状態判定部110は、赤信号の待時間のカウントダウンした値が一定値に到達したか否かを監視し(S108)、カウントダウン値が一定値に到達すると、その結果をコントローラ150へ伝える。一定値は、例えば、赤信号が青信号に変化する数秒前、あるいは青信号が点灯する数秒前であり、この時間は、予め設定される。コントローラ150は、一定値に到達したことの連絡を受け取ると、表示部120および画像ソース部140を制御し、3次元画像から2次元画像に表示を切替える(S109)。つまり、自車が走行を開始する時間よりも前に3次元画像から2次元画像への切替えを行う。これにより、走行開始する前に3次元画像が終了され、運転者は、現実社会を見る前に目または脳の切替を促進するための準備期間を得ることができ、同時に、2次元画像を見ることで目の負担も軽減される。
【0031】
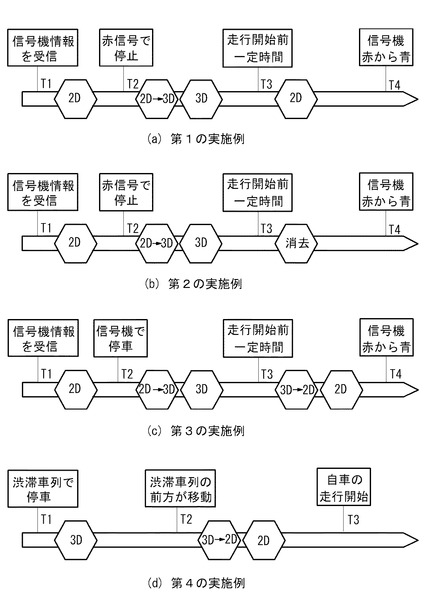
図6(a)は、第1の実施例による表示切替のタイミングを示している。時刻T1で、信号機の動作情報が受信される。このとき、表示部120は、走行中であるので2次元表示のままである。時刻T2で、自車が赤信号で停止すると、表示部120は、2次元表示から3次元表示に切替えられる。停車中、3次元表示が継続されるが、時刻T3で、走行開始前の一定時間に到達すると、つまり、走行開始が予測されると、表示部120は、3次元表示から2次元表示に切替えられる。そして、時刻T4で信号機が赤信号から青信号に変わり、自車が走行を開始する。こうして、停止状態から走行状態に移行するとき、現実社会を見るための準備期間が与えられ、運転者の目の負担が軽減さえる。
【0032】
図6(b)は、第2の実施例の表示切替のタイミングを示している。第1の実施例では、停車状態から走行状態に移行するとき、3次元表示から2次元表示に切替えるようにしたが、第2の実施例では、表示部120の画像表示を消去する。これにより、運転者の目の負担を軽減することができる。また、全ての画像を消去するのではなく、運転中に見る必要がない画像(例えば、テレビ画像や映画など)のみを消去し、運転中に見ることがあるナビゲーション画像は消去しないようにしてもよい。
【0033】
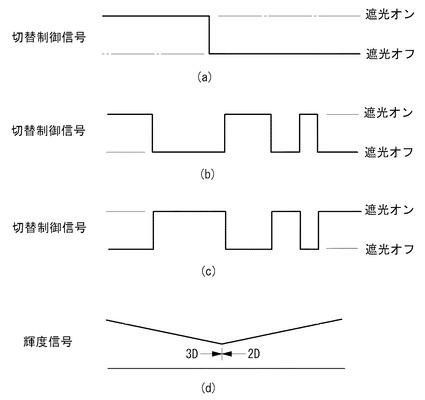
次に、本発明の第3の実施例について説明する。第1の実施例では、時刻T3において、走行開始前の一定時間、つまり赤信号の待時間が一定値に到達すると、3次元表示から2次元表示に切替えたが、第3の実施例では、この切替を段階的に行うことで、運転者の目の負担を最小限にする。図7(a)は、第1の実施例のときの遮光部210aに与えられる切替制御信号を示している。切替制御信号が論理ハイのとき、遮光部210aは遮光オンであり、論理ローのとき、遮光部210aは遮光オフである。
【0034】
一方、第3の実施例では、図7(b)に示すように、切替制御信号は論理ハイから論理ローへ移行するのに複数のパルスを用いて変化される。これにより、3次元表示から2次元表示への切替が段階的になり、運転者の目の負荷を最小限にすることができる。また、図6(a)ないし(c)の時刻T2で2次元表示から3次元表示に切替える場合にも、図7(c)に示すように、切替制御信号を段階的に変化させるようにしてもよい。
【0035】
図7(d)は、第3の実施例の変形例を示している。視野バリア210の遮光部210aがオンからオフに切替えられるとき、表示部210の輝度を徐々に小さくし(リニアでもよいし段階的でもよい)、切り替わった時点から輝度を徐々に大きくするようにしてもよい。このような表示切替により、目の負担を和らげることができる。輝度の変化は、図7(a)ないし(c)との組合せであってもよい。この場合、輝度の変極点は、切替制御信号が変化するタイミングと一致させるか、その段階的な変化を行う期間内に一致される。
【0036】
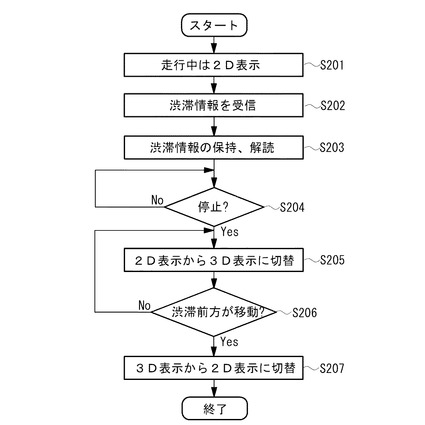
次に、本発明の第4の実施例について説明する。第4の実施例は、渋滞により停止したときの表示切替に関するものであり、その動作フローを図8に示す。自車が走行中、表示部120には2次元表示が表示される(S201)。走行中に、自車前方に渋滞が発生していると、DSSS等の道路交通情報として渋滞情報が受信される(S202)。渋滞情報は、例えば、前方に渋滞車列が存在すること、渋滞車列までの距離または時間、渋滞車列の前方の移動の有無などを含む。
【0037】
外部情報取得部160は、受信した渋滞情報を一時保持し、当該渋滞情報を解読し(S203)、その解読結果を車両状態判定部110へ提供する。車両状態判定部110は、自車が渋滞により停止したか否かを監視し(S204)、自車が停止したと判定されると、コントローラ150は、2次元表示から3次元表示に切替える(S205)。外部情報取得部160は、絶えず最新の渋滞情報を受信し、当該渋滞情報に基づき渋滞車列の前方が移動を開始したか否かを判定する(S206)。渋滞者列の前方が移動を開始したと判定されると、その判定結果がコントローラ150へ伝えられ、コントローラ150は、表示部120の表示を3次元表示から2次元表示に切替える(S207)。その後、自車の走行が開始される。
【0038】
図6(d)は、第4の実施例の表示切替のタイミングを表している。時刻T1で、自車が渋滞車列で停止し、これに応答して、2次元表示から3次元表示に切替えられる。時刻T2で、渋滞車列の前方の移動が受信されたことに応答して、3次元表示から2次元表示に切替えられ、時刻T3で自車の走行が開始される。
【0039】
次に、本発明の第5の実施例について説明する。図4Bは、第5の実施例の画像表示装置100Bの構成を示している。第5の実施例では、自車の前方に存在する車両等の障害物を検出する障害物検出部170を備えている。障害物検出部170は、ミリ波レーダーや赤外線などを用い、自車前方の障害物からの反射光を受信することで、自車前方に存在する障害物までの距離および移動方向を検出することができる。また、障害物検出部170は、撮像カメラにより自車前方を撮像し、そこに映し出される車両等の障害物を画像認識することで、障害物までの距離および移動方向を検出するものであってもよい。障害物検出部170により検出された検出結果は、車両状態判定部110へ提供され、自車の走行状態の判定に利用される。
【0040】
図6(d)に示した渋滞車列で自車が停止したときの表示切替は、第5の実施例を用いても実施することができる。図9は、第5の実施例の動作を説明するフローチャートである。上記したように、走行中、運転者用の画像は、2次元表示され(S301)、自車が停止したことが検出されると(S302)、これに応答して表示部120は、2次元表示から3次元表示に切り替えられる(S303)。第5の実施例では、自車が停止したことに応答して、障害物検出部170が自車の前方に存在する障害物を検出する(S304)。検出情報には、自車前方の車両までの距離等が検出される。また、撮像カメラにより車両が検出された場合には、検出情報として、車両のブレーキランプの点灯情報を含めるようにしてもよい。障害物検出部170は、一定の周期で最新の検出結果を車両状態判定部110へ提供する。
【0041】
車両状態判定部110は、検出結果に基づき、障害物が移動したか否かを判定する(S305)。例えば、前回検出されたときの障害物までの距離よりも今回検出されたときの障害物の距離が大きくなったとき、あるいは前方車両のブレーキランプが点灯状態から消灯状態に変化したとき、障害物が移動するまたは移動したと判定する。コントローラ150は、障害物の移動があると判定されると、表示部120の表示を3次元表示から2次元表示に切替える(S306)。
【0042】
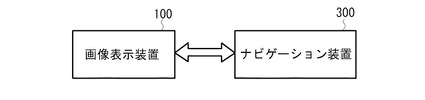
次に、本発明の第6の実施例について説明する。第1ないし第5の実施例は、主に運転者用の画像の表示切替を行うものであったが、第6の実施例は、助手席または後部座席用の画像(搭乗者用画像という)の表示切替を行うものである。第6の実施例では、図10に示すように画像表示装置100がナビゲーション装置300に適用されるものとする。図11は、第6の実施例の表示切替動作を説明するフローチャートである。
【0043】
ユーザによって目的地が設定され(S401)、目的地までの誘導経路に従い自車が走行を開始する。コントローラ150は、走行中、表示部120に搭乗者画像を3次元表示させる(S402)。ナビゲーション装置300により自車が目的地(または経由地)に到着したと判定されると、コントローラ150は、その判定結果に基づき、表示部120の搭乗者画像を3次元表示から2次元表示に切替える(S404)。目的地に到着したことで、搭乗者は、車外の現実世界を見る必要が生じるため、事前に、2次元表示に切替えることで、搭乗者の目の負担を軽減させることができる。
【0044】
以上、本発明の好ましい実施の形態について詳述したが、本発明は、特定の実施形態に限定されるものではなく、特許請求の範囲に記載された本発明の要旨の範囲内において、種々の変形・変更が可能である。
【0045】
例えば、本発明の画像表示装置100は、図12に示すように、電子装置400の一部に適用することができる。電子装置400は、ナビゲーション装置300、テレビ受信機310、オーディオ・ビデオ(AV)再生装置320を含み、画像ソース部140は、ナビゲーション装置300、テレビ受信機310およびAV再生装置320から選択的に画像データを表示部120へ提供し、表示部120は、裸眼による3次元表示または2次元表示を行う。なお、上記した第1ないし第6の実施例は、それぞれ単独で実施されるものであってもよいし、第1ないし第6の実施例を適宜組み合わせて実施されるものであってもよい。
【符号の説明】
【0046】
100、100A:画像表示装置 110:車両情報判定部
120:表示部 130:入力部
140:画像ソース部 150:コントローラ
160:外部情報取得部 170:障害物検出部
200:液晶パネル 202:偏光板
204:TFT基板 206:液晶層
208:カラーフィルター基板 210:視野バリア
210a:遮光部 210b:透光部
212:ガラス基板 214:偏光板
【技術分野】
【0001】
本発明は、裸眼による3次元画像を選択的に表示可能な画像表示装置に関し、特に、車載に搭載される画像表示装置に関する。
【背景技術】
【0002】
自動車等の移動体には、ナビゲーション画像、テレビ画像、インターネット画像、DVD画像などを表示する表示装置が搭載され、運転に必要な情報を与えたり、搭乗者にエンターテイメントな情報を提供している。車載用表示装置は、通常、車内空間のフロントに設置されるが、走行中に運転者がナビゲーション画像以外の画像を見ることは、安全運転上好ましいことではない。このため、運転者によって視認できる画像と助手席の搭乗者によって視認できる画像とを別々に表示する表示装置が特許文献1に開示されている。
【0003】
また、近年では、ゲーム機器などにおいて3次元画像を表示する技術が普及しつつある。3次元表示は、視差を利用する方式が一般的である。例えば、特許文献2は、立体画像の表示や複数の画像の同時表示が可能な液晶表示装置を搭載するカーナビゲーション装置を開示している。図1は、特許文献2の立体画像を表示する液晶表示装置の構成を示す図である。液晶表示装置は、第1および第2の光源1a、1bと、導光板2と、両面プリズムシート3と、透過型表示パネル4とを含み、第1の光源1aからの光は、導光板2の入射端面2aから入射され、第2の光源1bからの光は、導光板2の入射端面2bから入射され、導光板2内で繰り返し反射された光は、その出射面2cから両面プリズムシート3に入射される。両面プリズムシート3の入射面には三角形状プリズム列3aが形成され、出射面には円筒状レンズ列3bが形成され、光源1a、1bから発せられた光は、それぞれ左右の視差に対応する角度で透過型表示パネル4から出射され、左右方向に異なる画像を表示したり、立体画像の表示を可能にしている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2005−165228号公報
【特許文献2】特開2005−266293号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
3次元表示は、リアルな映像、インパクトのある映像を提供することができるため、映画、ショッピングや広告の映像に利用されることが予想される。3次元表示には、専用の3Dメガネを用いるものと、視差を利用した裸眼によるものがある。裸眼による3次元表示は、ユーザにとって煩わしさがなく快適である反面、ユーザの目に負荷または負担が生じる。このため、3次元画像を表示する表示装置を車載機に用いた場合には、3次元表示から2次元表示に切替える際に、運転者または搭乗者の目の負担が最小限に軽減されることが望ましい。さらに、運転者または搭乗者が3次元表示の仮想社会から現実社会を見るときの目の負荷を最小限にすることも望まれる。特に、長時間、3次元表示を見ていた場合には、現実社会を見るための慣らしが必要である。
【0006】
本発明は、上記従来の課題を解決し、ユーザの目の負担を軽減した3次元画像を表示可能な画像表示装置を提供することを目的とする。
【課題を解決するための手段】
【0007】
本発明に係る、車両に搭載可能な画像表示装置は、2次元表示または3次元表示を行うことができる表示手段と、車両が停止状態から走行状態に移行する否かを判定する判定手段と、前記判定手段により停止状態から走行状態に移行すると判定されたとき、3次元表示から2次元表示に切替わるように前記表示手段を制御する制御手段とを有する。
【0008】
好ましくは画像表示装置はさらに、外部からの情報を受信する受信手段を含み、前記判定手段は、前記受信手段で受信した情報に基づき停止状態から走行状態に移行すると判定する。好ましくは前記外部からの情報は、交差点における信号機の動作情報を含み、前記判定手段は、信号機が赤信号から青信号に変化するまでの待時間情報に基づき停止状態から走行状態に移行すると判定する。好ましくは前記判定手段は、赤信号から青信号に変化する一定時間前に、停止状態から走行状態に移行すると判定する。好ましくは前記外部からの情報は、渋滞車列における前方車両の移動情報を含み、前記判定手段は、前記移動情報に基づき停止状態から走行状態に移行すると判定する。好ましくは前記制御手段は、3次元表示から2次元表示、または2次元表示から3次元表示への段階的な切替を制御する。
【0009】
本発明に係る、車両に搭載可能な画像表示装置は、2次元表示または3次元表示を行うことができる表示手段と、目的地に到着したか否かを判定する判定手段と、前記表示手段を制御する制御手段とを有し、前記制御手段は、走行中に運転者以外の搭乗者向けの画像を3次元表示させている場合に、前記判定手段により目的地に到着すると判定されたとき、3次元表示から2次元表示に切替える。好ましくは前記表示手段は、視差バリアを利用した裸眼による3次元表示が可能である。
【0010】
本発明に係るプログラムは、2次元表示または3次元表示を行うことができる表示手段を備えた画像表示装置により実行されるものであって、車両が停止状態から走行状態に移行する否かを判定するステップと、停止状態から走行状態に移行すると判定されたとき、3次元表示から2次元表示に切替わるように前記表示手段を制御するステップとを有する。
【発明の効果】
【0011】
本発明によれば、停止状態から走行状態に移行すると判定された場合に、3次元表示から2次元表示に切替えるようにしたので、ユーザは、現実社会を見る前に目を慣らすことができ、目の負担を軽減することができる。特に、走行開始前に3次元表示を終了させることで、3次元表示から現実社会への目または脳の切替を促進させ、安全運転を担保することができる。
【図面の簡単な説明】
【0012】
【図1】従来の立体画像を表示可能な車両に搭載される画像表示装置の構成を示す図である。
【図2】本発明の好ましい実施形態に係る画像表示装置の構成を示すブロック図である。
【図3】図2に示す表示部の構成例を示す断面図。
【図4A】本発明の第1の実施例に係る画像表示装置の構成を示すブロック図である。
【図4B】本発明の第5の実施例に係る画像表示装置の構成を示すブロック図である。
【図5】本発明の第1の実施例に係る表示切替動作を説明するフローチャートである。
【図6】本発明の第1ないし第4の実施例の表示切替タイミングを示す図である。
【図7】本発明の第3の実施例に係る表示切替を説明する図である。
【図8】本発明の第4の実施例に係る表示切替動作を説明するフローチャートである。
【図9】本発明の第5の実施例に係る表示切替動作を説明するフローチャートである。
【図10】本発明の第6の実施例の構成を示すブロック図である。
【図11】本発明の第6の実施例に係る表示切替動作を説明するフローチャートである。
【図12】本発明の画像表示装置を適用した電子装置の構成例を示す図である。
【発明を実施するための形態】
【0013】
次に、本発明の実施の形態について説明する。本発明の実施の形態に係る画像表示装置は、好ましくは車両等の移動体に搭載され、移動体の空間内において裸眼による3次元表示または立体表示を行う。また、画像表示装置は、移動体に搭載される他の電子機器、例えば、ナビゲーション装置、オーディオ・ビデオ装置、テレビ受信機、および情報端末装置の画像表示媒体として利用される。
【0014】
図2は、本発明の好適な実施形態に係る画像表示装置の構成を示すブロック図である。本実施形態に係る画像表示装置100は、車両の状態を判定する車両状態判定部110と、2次元表示または3次元表示を行うことができる表示部120と、ユーザからの入力を受け取る入力部130と、表示部120に表示される画像データを供給する画像ソース部140と、各部を制御するコントローラ150とを含んで構成される。
【0015】
車両状態判定部110は、自車が走行状態から停止状態に移行するか否か、その反対に停止状態から走行状態に移行するか否か、あるいは自車前方の車両が停止しているか否か等を判定する。車両状態判定部110は、例えば、車両に搭載されている車速センサ、パーキングブレーキのオンまたはオフなどの車両の状態を表す情報を利用したり、外部から取得した道路交通情報を利用したり、撮像カメラやミリ波レーダーによる検出情報を利用することができる。さらに、ナビゲーション装置に含まれる道路地図データなども利用することもできる。
【0016】
好ましい態様では、車両状態判定部110は、自車が交差点で停止しているとき、外部から受信した信号機の動作情報に基づき自車が停止状態から走行状態に移行するタイミングを判定する。他の好ましい態様では、車両状態判定部110は、自車が渋滞で停止しているとき、外部から受信した渋滞情報に基づき自車が停止状態から走行状態に移行するタイミングを判定する。さらに好ましい態様では、車両状態判定部110は、ミリ波レーダー、赤外線、撮像カメラ等の障害物検出部からの検出情報に基づき自車が停止状態から走行状態に移行するタイミングと判定する。
【0017】
表示部120は、画像ソース部140から供給された画像を2次元表示または3次元表示することができる。好ましい実施形態では、表示部120は、裸眼による3次元表示を可能にする。人間が映像を立体的に認識するのは、左右の目に映像の違い(両眼視差)を脳が処理して、奥行きを認識する。つまり、右目用の映像を右目にだけ届け、左目用の映像を左目だけに届けることで立体表示を行うことができる。
【0018】
裸眼による3次元表示は、公知のように、インテグラルイメージング方式と視差バリア方式が知られている。インテグラルイメージング方式は、微細なレンズが無数に並べられたレンチキュラーシートの背後に液晶パネルを配置するものである。視差バリア方式は、微細な縦縞状の遮光物(液晶シャッターなど)をパネルに配置することで左右の目に異なる映像を届けるものである。遮光物を構成する液晶シャッターをスイッチングすることで、3次元表示と2次元表示の切替えを容易に実現することができる。
【0019】
図3は、表示部120を構成する視差バリア方式の液晶パネルの一例を示している。液晶パネル200は、光源となるバックライト装置からの直線偏光を通過させる偏光板202と、TFT基板(アクティブ薄膜トランジスタ基板)204と、液晶層206と、カラーフィルター基板208と、視差バリア210と、ガラス基板212と、偏光板214とを含んで構成される。
【0020】
バックライト装置からの光は、偏光板202によって特定の直線偏光の光のみが透過され、透過された光は、TFT基板204のトランジスタによって駆動された液晶層206によって変調され、カラーフィルター基板208に入射される。カラーフィルター基板208は、RGB(赤、緑、青)の三原色のカラーフィルターを配列し、RGBによって1つの画素が形成される。視差バリア210は、カラーフィルター基板208上に配置されたパネルであり、光を遮断する遮光部210aと光を透過する透光部210bとを有する。遮光部210aと透光部210bとは一列置きに交互に複数配列され、遮光部210aと透光部210bのピッチは、カラーフィルターのR、G、Gの配列ピッチに対応する。それぞれの透光部210bからは、観察者の右目方向のR、G、Bの光が視野方向V1に出射され、同時に、左目方向のR、G、Bの光が視野方向V2に出射される。視野バリア210は、液晶から構成され、遮光部210aに対応する電極に電圧を印加することで、遮光部210aが光を遮光するオン状態、または光を透光させるオフ状態に切替えることができる。遮光部210aの切替は、コントローラ150からの切替制御信号によって成され、表示部120に3次元画像を表示させる場合には、遮光部210aが遮光状態となり、2次元画像を表示させる場合には、遮光部210aが透光状態となる。
【0021】
入力部130は、ユーザと画像表示装置100との間のユーザインターフェースを構成する。入力部130は、例えば、表示すべき画像ソースの選択の指示、2次元表示または3次元表示の切替などの指示などをユーザから受け取ることができる。
【0022】
画像ソース部140は、表示部120において表示される画像データを提供し、あるいは生成する。画像ソース部140は、入力部130からのユーザ選択に応じて、例えば、自車位置周辺の道路地図であるナビゲーション画像、DVD等の記憶媒体から再生された画像、またはテレビ放送により受信した画像などを提供する。また、画像ソース部140は、コントローラ150から3次元表示をする旨の指示が与えられた場合には、3次元表示のための画像、つまり、視差に応じた観察者の右目用画像と左目用画像を生成することができる。
【0023】
コントローラ150は、例えば、中央処理装置、中央処理プロセッサ、マイクロコンピュータ、マイクロプロセッサ、あるいは処理プロセッサなどの制御装置を用いて構成される。好ましくは、コントローラ150は、3次元表示または2次元表示の切替を行うための表示切替プログラムをメモリに記憶し、当該プログラムを実行することで、表示部120および画像ソース部140を制御する。
【実施例】
【0024】
次に、本実施例の画像表示装置の第1の実施例について説明する。図4は、第1の実施例に係る画像表示装置100Aの構成を示し、図2と同一構成については同一番号を付す。第1の実施例では、画像表示装置100Aは、自車の外部から道路交通に関する情報を取得する外部情報取得部160を含む。外部情報取得部160は、安全運転支援システム(DSSS: driving safety support systems)に代表されるような、光ビーコンや無線による通信を用いてリアルタイムな道路交通情報を取得する。DSSSでは、交差点や主要な道路に配置された光ビーコンを利用し、そこを通過する車両にリアルタイムな道路交通情報を与える。例えば、交差点に進入する車両に対して、前方に信号機があること、その信号機が赤信号または青信号であるとと、赤信号である場合に青信号に変わるまでの待時間などの情報を提供する。また、前方の渋滞車列に突入する車両に対して、渋滞車列までの距離、渋滞車列の前方が移動を開始したか否かの情報などを提供する。外部情報取得手段160は、DSSS以外にも、例えば、VICS、DSRC、スマートウエイ、インターネットなどから情報を取得しこれを解読するものであってもよい。
【0025】
車両状態判定部110は、外部情報取得部160で取得された情報に基づき、車両が走行中かまたは停止中か、車両が停止状態から走行状態に移行するか否か、あるいは、車両が走行状態から停止状態に移行するか否か等を目的に応じてを判定する。この判定結果は、コントローラ150へ提供され、コントローラ150は、この情報に基づき3次元表示または2次元表示の切替を行う。
【0026】
図5は、第1の実施例に係る画像表示装置の表示切替を説明するフローチャートである。ここでは、運転者用の画像を表示することを前提とする。画像表示装置100Aは、ユーザにより選択された画像を画像ソース部140から出力させ、これを表示部120に表示させるが、走行中は、運転者に3次元画像を見せることは危険であるため、2次元画像を表示させる(S101)。車両状態判定部150は、車速センサなどの情報を用いて自車が走行中であるか否かを判定する。コントローラ150は、自車が走行中である間、切替制御信号を介して視野バリア210の遮光部210aをオフさせ(言い換えれば、透光状態にし)、表示部120が2次元画像を表示できるようにする。また、画像ソース部140からは通常の画像データが表示部120へ提供される。
【0027】
自車が交差点近傍を通過すると、外部情報取得部160は、交差点手前に設置された光ビーコンから信号機の動作情報を受信する(S102)。信号機の動作情報は、前方の交差点に信号機が存在すること、信号機の状態(赤信号、青信号、右折信号など)、赤信号であるときの待時間(赤信号から青信号に変化するまでの時間)などである。外部情報取得部160は、受信した動作情報を一時保持し、当該動作情報を解読し(S103)、その解読結果を車両状態判定部110へ提供する。
【0028】
次に、車両状態判定部110は、動作情報を受け取り、交差点の信号が赤信号であるか否かを判定し(S104)、赤信号である場合には、赤信号の待時間または青信号になるまでの残時間をカウントダウンする(S105)。例えば、赤信号の待時間が1分20秒であるならば、車両状態判定部110は、内蔵するタイマーなどを用いて、1分20秒を1秒単位でカウントダウンする。
【0029】
次に、車両状態判定部150は、自車が停止したか否かを判定する(S106)。停止したか否かは、例えば、車速センサなどを利用して行うことができる。自車が停止したと判定されると、コントローラ150は、2次元表示から3次元表示に表示を切替える(S107)。すなわち、画像ソース部140は、選択されている画像を左目用画像と右目用画像に2分割し、これを表示部120へ提供する。また、視野バリア210の遮光部210aは、コントローラ150からの切替制御信号により遮光状態とされる。こうして、自車が停止すると、表示部120には立体画像が表示され、運転者は、裸眼で立体画像を見ることができる。
【0030】
また、車両状態判定部110は、赤信号の待時間のカウントダウンした値が一定値に到達したか否かを監視し(S108)、カウントダウン値が一定値に到達すると、その結果をコントローラ150へ伝える。一定値は、例えば、赤信号が青信号に変化する数秒前、あるいは青信号が点灯する数秒前であり、この時間は、予め設定される。コントローラ150は、一定値に到達したことの連絡を受け取ると、表示部120および画像ソース部140を制御し、3次元画像から2次元画像に表示を切替える(S109)。つまり、自車が走行を開始する時間よりも前に3次元画像から2次元画像への切替えを行う。これにより、走行開始する前に3次元画像が終了され、運転者は、現実社会を見る前に目または脳の切替を促進するための準備期間を得ることができ、同時に、2次元画像を見ることで目の負担も軽減される。
【0031】
図6(a)は、第1の実施例による表示切替のタイミングを示している。時刻T1で、信号機の動作情報が受信される。このとき、表示部120は、走行中であるので2次元表示のままである。時刻T2で、自車が赤信号で停止すると、表示部120は、2次元表示から3次元表示に切替えられる。停車中、3次元表示が継続されるが、時刻T3で、走行開始前の一定時間に到達すると、つまり、走行開始が予測されると、表示部120は、3次元表示から2次元表示に切替えられる。そして、時刻T4で信号機が赤信号から青信号に変わり、自車が走行を開始する。こうして、停止状態から走行状態に移行するとき、現実社会を見るための準備期間が与えられ、運転者の目の負担が軽減さえる。
【0032】
図6(b)は、第2の実施例の表示切替のタイミングを示している。第1の実施例では、停車状態から走行状態に移行するとき、3次元表示から2次元表示に切替えるようにしたが、第2の実施例では、表示部120の画像表示を消去する。これにより、運転者の目の負担を軽減することができる。また、全ての画像を消去するのではなく、運転中に見る必要がない画像(例えば、テレビ画像や映画など)のみを消去し、運転中に見ることがあるナビゲーション画像は消去しないようにしてもよい。
【0033】
次に、本発明の第3の実施例について説明する。第1の実施例では、時刻T3において、走行開始前の一定時間、つまり赤信号の待時間が一定値に到達すると、3次元表示から2次元表示に切替えたが、第3の実施例では、この切替を段階的に行うことで、運転者の目の負担を最小限にする。図7(a)は、第1の実施例のときの遮光部210aに与えられる切替制御信号を示している。切替制御信号が論理ハイのとき、遮光部210aは遮光オンであり、論理ローのとき、遮光部210aは遮光オフである。
【0034】
一方、第3の実施例では、図7(b)に示すように、切替制御信号は論理ハイから論理ローへ移行するのに複数のパルスを用いて変化される。これにより、3次元表示から2次元表示への切替が段階的になり、運転者の目の負荷を最小限にすることができる。また、図6(a)ないし(c)の時刻T2で2次元表示から3次元表示に切替える場合にも、図7(c)に示すように、切替制御信号を段階的に変化させるようにしてもよい。
【0035】
図7(d)は、第3の実施例の変形例を示している。視野バリア210の遮光部210aがオンからオフに切替えられるとき、表示部210の輝度を徐々に小さくし(リニアでもよいし段階的でもよい)、切り替わった時点から輝度を徐々に大きくするようにしてもよい。このような表示切替により、目の負担を和らげることができる。輝度の変化は、図7(a)ないし(c)との組合せであってもよい。この場合、輝度の変極点は、切替制御信号が変化するタイミングと一致させるか、その段階的な変化を行う期間内に一致される。
【0036】
次に、本発明の第4の実施例について説明する。第4の実施例は、渋滞により停止したときの表示切替に関するものであり、その動作フローを図8に示す。自車が走行中、表示部120には2次元表示が表示される(S201)。走行中に、自車前方に渋滞が発生していると、DSSS等の道路交通情報として渋滞情報が受信される(S202)。渋滞情報は、例えば、前方に渋滞車列が存在すること、渋滞車列までの距離または時間、渋滞車列の前方の移動の有無などを含む。
【0037】
外部情報取得部160は、受信した渋滞情報を一時保持し、当該渋滞情報を解読し(S203)、その解読結果を車両状態判定部110へ提供する。車両状態判定部110は、自車が渋滞により停止したか否かを監視し(S204)、自車が停止したと判定されると、コントローラ150は、2次元表示から3次元表示に切替える(S205)。外部情報取得部160は、絶えず最新の渋滞情報を受信し、当該渋滞情報に基づき渋滞車列の前方が移動を開始したか否かを判定する(S206)。渋滞者列の前方が移動を開始したと判定されると、その判定結果がコントローラ150へ伝えられ、コントローラ150は、表示部120の表示を3次元表示から2次元表示に切替える(S207)。その後、自車の走行が開始される。
【0038】
図6(d)は、第4の実施例の表示切替のタイミングを表している。時刻T1で、自車が渋滞車列で停止し、これに応答して、2次元表示から3次元表示に切替えられる。時刻T2で、渋滞車列の前方の移動が受信されたことに応答して、3次元表示から2次元表示に切替えられ、時刻T3で自車の走行が開始される。
【0039】
次に、本発明の第5の実施例について説明する。図4Bは、第5の実施例の画像表示装置100Bの構成を示している。第5の実施例では、自車の前方に存在する車両等の障害物を検出する障害物検出部170を備えている。障害物検出部170は、ミリ波レーダーや赤外線などを用い、自車前方の障害物からの反射光を受信することで、自車前方に存在する障害物までの距離および移動方向を検出することができる。また、障害物検出部170は、撮像カメラにより自車前方を撮像し、そこに映し出される車両等の障害物を画像認識することで、障害物までの距離および移動方向を検出するものであってもよい。障害物検出部170により検出された検出結果は、車両状態判定部110へ提供され、自車の走行状態の判定に利用される。
【0040】
図6(d)に示した渋滞車列で自車が停止したときの表示切替は、第5の実施例を用いても実施することができる。図9は、第5の実施例の動作を説明するフローチャートである。上記したように、走行中、運転者用の画像は、2次元表示され(S301)、自車が停止したことが検出されると(S302)、これに応答して表示部120は、2次元表示から3次元表示に切り替えられる(S303)。第5の実施例では、自車が停止したことに応答して、障害物検出部170が自車の前方に存在する障害物を検出する(S304)。検出情報には、自車前方の車両までの距離等が検出される。また、撮像カメラにより車両が検出された場合には、検出情報として、車両のブレーキランプの点灯情報を含めるようにしてもよい。障害物検出部170は、一定の周期で最新の検出結果を車両状態判定部110へ提供する。
【0041】
車両状態判定部110は、検出結果に基づき、障害物が移動したか否かを判定する(S305)。例えば、前回検出されたときの障害物までの距離よりも今回検出されたときの障害物の距離が大きくなったとき、あるいは前方車両のブレーキランプが点灯状態から消灯状態に変化したとき、障害物が移動するまたは移動したと判定する。コントローラ150は、障害物の移動があると判定されると、表示部120の表示を3次元表示から2次元表示に切替える(S306)。
【0042】
次に、本発明の第6の実施例について説明する。第1ないし第5の実施例は、主に運転者用の画像の表示切替を行うものであったが、第6の実施例は、助手席または後部座席用の画像(搭乗者用画像という)の表示切替を行うものである。第6の実施例では、図10に示すように画像表示装置100がナビゲーション装置300に適用されるものとする。図11は、第6の実施例の表示切替動作を説明するフローチャートである。
【0043】
ユーザによって目的地が設定され(S401)、目的地までの誘導経路に従い自車が走行を開始する。コントローラ150は、走行中、表示部120に搭乗者画像を3次元表示させる(S402)。ナビゲーション装置300により自車が目的地(または経由地)に到着したと判定されると、コントローラ150は、その判定結果に基づき、表示部120の搭乗者画像を3次元表示から2次元表示に切替える(S404)。目的地に到着したことで、搭乗者は、車外の現実世界を見る必要が生じるため、事前に、2次元表示に切替えることで、搭乗者の目の負担を軽減させることができる。
【0044】
以上、本発明の好ましい実施の形態について詳述したが、本発明は、特定の実施形態に限定されるものではなく、特許請求の範囲に記載された本発明の要旨の範囲内において、種々の変形・変更が可能である。
【0045】
例えば、本発明の画像表示装置100は、図12に示すように、電子装置400の一部に適用することができる。電子装置400は、ナビゲーション装置300、テレビ受信機310、オーディオ・ビデオ(AV)再生装置320を含み、画像ソース部140は、ナビゲーション装置300、テレビ受信機310およびAV再生装置320から選択的に画像データを表示部120へ提供し、表示部120は、裸眼による3次元表示または2次元表示を行う。なお、上記した第1ないし第6の実施例は、それぞれ単独で実施されるものであってもよいし、第1ないし第6の実施例を適宜組み合わせて実施されるものであってもよい。
【符号の説明】
【0046】
100、100A:画像表示装置 110:車両情報判定部
120:表示部 130:入力部
140:画像ソース部 150:コントローラ
160:外部情報取得部 170:障害物検出部
200:液晶パネル 202:偏光板
204:TFT基板 206:液晶層
208:カラーフィルター基板 210:視野バリア
210a:遮光部 210b:透光部
212:ガラス基板 214:偏光板
【特許請求の範囲】
【請求項1】
車両に搭載可能な画像表示装置であって、
2次元表示または3次元表示を行うことができる表示手段と、
車両が停止状態から走行状態に移行する否かを判定する判定手段と、
前記判定手段により停止状態から走行状態に移行すると判定されたとき、3次元表示から2次元表示に切替わるように前記表示手段を制御する制御手段と、
を有する画像表示装置。
【請求項2】
画像表示装置はさらに、外部からの情報を受信する受信手段を含み、前記判定手段は、前記受信手段で受信した情報に基づき停止状態から走行状態に移行すると判定する、請求項1に記載の画像表示装置。
【請求項3】
前記外部からの情報は、交差点における信号機の動作情報を含み、前記判定手段は、信号機が赤信号から青信号に変化するまでの待時間情報に基づき停止状態から走行状態に移行すると判定する、請求項1または2に記載の画像表示装置。
【請求項4】
前記判定手段は、赤信号から青信号に変化する一定時間前に、停止状態から走行状態に移行すると判定する、請求項3に記載の画像表示装置。
【請求項5】
前記外部からの情報は、渋滞車列における前方車両の移動情報を含み、前記判定手段は、前記移動情報に基づき停止状態から走行状態に移行すると判定する、請求項1ないし4いずれか1つに記載の画像表示装置。
【請求項6】
前記制御手段は、3次元表示から2次元表示、または2次元表示から3次元表示への段階的な切替を制御する、請求項1ないし5いずれか1つに記載の画像表示装置。
【請求項7】
車両に搭載可能な画像表示装置であって、
2次元表示または3次元表示を行うことができる表示手段と、
目的地に到着したか否かを判定する判定手段と、
前記表示手段を制御する制御手段とを有し、
前記制御手段は、走行中に運転者以外の搭乗者向けの画像を3次元表示させている場合に、前記判定手段により目的地に到着すると判定されたとき、3次元表示から2次元表示に切替える、画像表示装置。
【請求項8】
前記表示手段は、視差バリアを利用した裸眼による3次元表示が可能である、請求項1ないし7いずれか1つに記載の画像表示装置。
【請求項9】
2次元表示または3次元表示を行うことができる表示手段を備えた画像表示装置により実行されるプログラムであって、
車両が停止状態から走行状態に移行する否かを判定するステップと、
停止状態から走行状態に移行すると判定されたとき、3次元表示から2次元表示に切替わるように前記表示手段を制御するステップと、
を有するプログラム。
【請求項10】
プログラムはさらに、外部から情報を受信するステップを含み、前記判定するステップは、受信した情報に基づき停止状態から走行状態に移行すると判定する、請求項9に記載のプログラム。
【請求項11】
前記外部からの情報は、交差点における信号機の動作情報を含み、前記判定するステップは、信号機が赤信号から青信号に変化するまでの待時間情報に基づき停止状態から走行状態に移行すると判定する、請求項10に記載のプログラム。
【請求項12】
前記判定するステップは、赤信号から青信号に変化する一定時間前に、停止状態から走行状態に移行すると判定する、請求項11に記載のプログラム。
【請求項13】
前記外部からの情報は、渋滞車列における前方車両の移動情報を含み、前記判定するステップは、前記移動情報に基づき停止状態から走行状態に移行すると判定する、請求項9に記載のプログラム。
【請求項14】
前記制御するステップは、3次元表示から2次元表示、または2次元表示から3次元表示への段階的な切替を制御する、請求項9ないし13いずれか1つに記載のプログラム。
【請求項1】
車両に搭載可能な画像表示装置であって、
2次元表示または3次元表示を行うことができる表示手段と、
車両が停止状態から走行状態に移行する否かを判定する判定手段と、
前記判定手段により停止状態から走行状態に移行すると判定されたとき、3次元表示から2次元表示に切替わるように前記表示手段を制御する制御手段と、
を有する画像表示装置。
【請求項2】
画像表示装置はさらに、外部からの情報を受信する受信手段を含み、前記判定手段は、前記受信手段で受信した情報に基づき停止状態から走行状態に移行すると判定する、請求項1に記載の画像表示装置。
【請求項3】
前記外部からの情報は、交差点における信号機の動作情報を含み、前記判定手段は、信号機が赤信号から青信号に変化するまでの待時間情報に基づき停止状態から走行状態に移行すると判定する、請求項1または2に記載の画像表示装置。
【請求項4】
前記判定手段は、赤信号から青信号に変化する一定時間前に、停止状態から走行状態に移行すると判定する、請求項3に記載の画像表示装置。
【請求項5】
前記外部からの情報は、渋滞車列における前方車両の移動情報を含み、前記判定手段は、前記移動情報に基づき停止状態から走行状態に移行すると判定する、請求項1ないし4いずれか1つに記載の画像表示装置。
【請求項6】
前記制御手段は、3次元表示から2次元表示、または2次元表示から3次元表示への段階的な切替を制御する、請求項1ないし5いずれか1つに記載の画像表示装置。
【請求項7】
車両に搭載可能な画像表示装置であって、
2次元表示または3次元表示を行うことができる表示手段と、
目的地に到着したか否かを判定する判定手段と、
前記表示手段を制御する制御手段とを有し、
前記制御手段は、走行中に運転者以外の搭乗者向けの画像を3次元表示させている場合に、前記判定手段により目的地に到着すると判定されたとき、3次元表示から2次元表示に切替える、画像表示装置。
【請求項8】
前記表示手段は、視差バリアを利用した裸眼による3次元表示が可能である、請求項1ないし7いずれか1つに記載の画像表示装置。
【請求項9】
2次元表示または3次元表示を行うことができる表示手段を備えた画像表示装置により実行されるプログラムであって、
車両が停止状態から走行状態に移行する否かを判定するステップと、
停止状態から走行状態に移行すると判定されたとき、3次元表示から2次元表示に切替わるように前記表示手段を制御するステップと、
を有するプログラム。
【請求項10】
プログラムはさらに、外部から情報を受信するステップを含み、前記判定するステップは、受信した情報に基づき停止状態から走行状態に移行すると判定する、請求項9に記載のプログラム。
【請求項11】
前記外部からの情報は、交差点における信号機の動作情報を含み、前記判定するステップは、信号機が赤信号から青信号に変化するまでの待時間情報に基づき停止状態から走行状態に移行すると判定する、請求項10に記載のプログラム。
【請求項12】
前記判定するステップは、赤信号から青信号に変化する一定時間前に、停止状態から走行状態に移行すると判定する、請求項11に記載のプログラム。
【請求項13】
前記外部からの情報は、渋滞車列における前方車両の移動情報を含み、前記判定するステップは、前記移動情報に基づき停止状態から走行状態に移行すると判定する、請求項9に記載のプログラム。
【請求項14】
前記制御するステップは、3次元表示から2次元表示、または2次元表示から3次元表示への段階的な切替を制御する、請求項9ないし13いずれか1つに記載のプログラム。
【図1】



【図2】
【図3】

【図4A】
【図4B】

【図5】

【図6】
【図7】
【図8】
【図9】

【図10】
【図11】

【図12】

【図2】
【図3】
【図4A】
【図4B】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【公開番号】特開2012−252153(P2012−252153A)
【公開日】平成24年12月20日(2012.12.20)
【国際特許分類】
【出願番号】特願2011−124534(P2011−124534)
【出願日】平成23年6月2日(2011.6.2)
【公序良俗違反の表示】
(特許庁注:以下のものは登録商標)
1.VICS
【出願人】(000101732)アルパイン株式会社 (2,424)
【Fターム(参考)】
【公開日】平成24年12月20日(2012.12.20)
【国際特許分類】
【出願日】平成23年6月2日(2011.6.2)
【公序良俗違反の表示】
(特許庁注:以下のものは登録商標)
1.VICS
【出願人】(000101732)アルパイン株式会社 (2,424)
【Fターム(参考)】
[ Back to top ]