
画像計測装置、画像計測方法及びプログラム
【課題】計測対象物の画像データに基づいて当該計測対象物の測定を行うに当たり、自動的に最適なエッジ抽出法が適用される構成を提供することを目的とする。
【解決手段】画像データに、当該画像の撮像に係る所定の撮像条件データを添付しておき、当該画像データに基づいて前記計測対象物の計測を行うために計測対象物の輪郭に対応するエッジを抽出する際、当該画像データに添付された撮像条件データに基づいて当該画像データについて適用するエッジ抽出方法を決定するようにした。
【解決手段】画像データに、当該画像の撮像に係る所定の撮像条件データを添付しておき、当該画像データに基づいて前記計測対象物の計測を行うために計測対象物の輪郭に対応するエッジを抽出する際、当該画像データに添付された撮像条件データに基づいて当該画像データについて適用するエッジ抽出方法を決定するようにした。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は画像計測装置、画像計測方法及びプログラムに係り、特に撮像によって得られた画像に基づいて計測対象物を計測するための画像計測装置、画像計測方法及びプログラムに関する。
【背景技術】
【0002】
測長用走査型電子顕微鏡、いわゆるCD−SEMを用いて計測対象物を撮像し、その画像データに基づいて当該計測対象物の特定箇所の長さを測定することによって、当該計測対象物の製造工程におけるプロセスの管理を行うことがなされている。この場合の計測対象物の例としては、例えば各種半導体装置、ハードディスク装置の記録・再生ヘッド等が挙げられる。
【0003】
ここでは撮像された画像中に特定の図形が存在することを想定し、その図形を構成するエッジ点を抽出する処理が行われる。この際には輝度値プロファイルを一方向に微分して得られる曲線を用いたエッジ抽出アルゴリズムが用いられる。
【0004】
しかしながらエッジ部分の輝度があまり明るくない画像に対しては微分カーブが急峻とならないため、しきい値を設定して輝度プロファイル曲線との交点を求めるエッジ抽出アルゴリズムが適する場合も考えられる。
【0005】
上記CD−SEMによって撮影された画像は、計測対象物の製造工程中のどの段階で撮像されたかによって、同じ部位に対するものであってもその輝度分布およびプロファイル形状が異なる場合がある。このため、上記微分によるエッジ抽出法が適した画像と、しきい値処理による方法が適した画像とが混在する可能性がある。この場合何らかの方法でエッジ抽出アルゴリズムを切り替える必要がある。尚このエッジ抽出アルゴリズムについては図14とともに後述する。
【特許文献1】特開2006−217082号公報
【発明の開示】
【発明が解決しようとする課題】
【0006】
本発明は上記課題に鑑みてなされたものであり、計測対象物の画像データに基づいて当該計測対象物の計測を行うに当たり、自動的に最適なエッジ抽出法が適用される構成を提供することを目的とする。
【課題を解決するための手段】
【0007】
本発明では、計測対象物の画像データに、当該画像の撮像に係る撮像条件データを添付しておき、当該画像データに基づいて前記計測対象物の計測を行うために当該計測対象物に設けられた所定の形状の輪郭に対応するエッジを抽出する際、当該画像データに添付された撮像条件データに基づいて当該画像データについて適用するエッジ抽出方法を決定するようにした。
【0008】
尚ここで撮像条件データの添付は、例えば画像データのファイルとこれに対応する撮像条件データのファイルとをコンピュータのハードディスク装置等の記憶装置における同じディレクトリに格納することで実現可能である。
【0009】
本発明によれば、操作者は予め計測対象物の画像データの各々に対し、該当する撮像条件データを添付しておき、当該撮像条件データが添付された画像データを画像計測装置の記憶装置に格納しておくことにより、画像計測装置にこれら画像データに対する計測動作を順次自動実行させることが可能となる。
【0010】
従来は計測対象物の画像データに対する計測処理を自動的に実行させようとしても、各画像データの処理において、そのエッジ抽出法の決定の工程で操作者自身が当該画像データを目視して最適なエッジ抽出法を判断する必要があった。このため計測処理の実行がその都度中断されることになってしまう。
【0011】
これに対し本発明では予め画像計測装置にセットする画像データに対して最適なエッジ抽出法の決定のための撮像条件データを添付するようにしたため、計測処理の効果的な効率向上が図り得る。
【0012】
尚ここで画像データの撮像条件データとは、当該画像データが計測対象物の製造工程中のどの段階における撮像で得られたものかを示すデータである。よって操作者が当該画像データを当該計測対象物の撮像によって得る際に取得可能なデータであり、その際に添付しておくことが可能である。
【0013】
そして処理対象の画像データが得られたのが計測対象物の製造工程中のどの段階における撮像によるものかを示すこの撮像条件データを参照することにより、画像計測装置が自動的に対応するエッジ抽出法を決定可能な構成を設けておけばよい。例えば撮像条件データとこれに対する最適なエッジ抽出法との関係を予めテーブル化しておき、画像計測装置がこのテーブルを参照することによって与えられた画像データの撮像条件データに対する最適なエッジ抽出法を自動的に決定可能な構成とすることが可能である。
【発明の効果】
【0014】
本発明によれば計測対象物の画像データに基づく当該計測対象物の計測処理の効率を効果的に向上し得る。
【発明を実施するための最良の形態】
【0015】
以下本発明の実施例の構成について詳細に説明する。
【0016】
本発明の実施例では、CD−SEMによって計測対象物の画像を撮影する際に該当する撮影条件データのファイルを添付しておく。そして実際の計測処理時、同ファイルから画像の撮像条件データを読み出すことによってその画像の種類を特定し、その特定結果に基づいてエッジ抽出アルゴリズム、すなわちエッジ抽出法を決定する構成を設けた。
【0017】
すなわち、与えられた画像が当該計測対象物の製造工程におけるどの段階で撮像されたものかを予め撮像条件データのファイルに記録しておき、同画像に基づくエッジ抽出処理の際、その撮像条件データのファイル内の文字列に基づいて最適なエッジ抽出アルゴリズムが自動的に選択されるようにした。
【0018】
本発明の実施例による画像計測装置によれば、計測対象物の撮像時に、その撮像条件データが別ファイルとして計測対象物の画像に添付され、同画像から図形が抽出され、これに基づいて計測処理がなされる。その添付された撮像条件データは実際の計測処理の前に読み出され、その読み出された撮像条件データに応じて最適なエッジ抽出アルゴリズムが選択される。
【0019】
更に、計測対象物の画像から1次元の輝度プロファイルが取り出され、その輝度プロファイルに対し、上記抽出に係る図形の対称軸の位置を検索する処理がなされる。そしてこの輝度プロファイルから前記図形を構成するエッジ点を抽出する際、この対称軸の右側のエッジと左側のエッジとに対して個別にしきい値処理がなされることでエッジ点を抽出する処理がなされる。又、同輝度プロファイルの形状が非対称であった場合、片側のしきい値を適宜補正してエッジを再抽出する。
【0020】
又このように一旦上記しきい値処理を行ってエッジ点の抽出を行い、その結果から非対称との判定がなされた際に一方のエッジを再抽出する場合には以下の動作を行う。
【0021】
すなわち上記輝度プロファイル上、エッジ抽出点と輝度最大点との距離が大きい方を補正対象とする。そして同補正対象のエッジ抽出点とそのしきい値判定に用いた輝度最大点との距離が他方のエッジ抽出点と対応する輝度最大点との距離のn倍であるとき、上記しきい値判定に用いた輝度最大値と補正対象のしきい値との差が他の輝度最大値と対応するしきい値との差の1/n倍になるように、当該補正対象のしきい値を補正する。そして補正対象につき、その補正したしきい値によって再度しきい値処理を行ってエッジを再抽出を実行する。
【0022】
又、このように輝度最大値としきい値との差を適用してしきい値の補正に用いる代わりに、輝度最大値と輝度最小値との差に対するしきい値の割合を適用してしきい値の補正を行うようにしてもよい。
【0023】
又、しきい値の補正を行う際、あらかじめ補正後のしきい値の上限を設定しておく。
【0024】
又、上記対称軸の位置を判定する際、あらかじめ対称軸近傍の画像を教師画像データとして設定しておき、その教師画像とのパターンマッチングにより処理対象画像における対称軸の位置を判定する。
【0025】
或いはこの場合においてパターンマッチングを用いる代わりに、輝度プロファイルの右側から探索した際に得られる極大点と同輝度プロファイルの左側から探索した際に得られる極大点との中点を候補点とする操作を探索位置を変えて少なくとも2回行い、そのようにして得られた複数の候補点の平均をとることによって得られた位置を真の対称軸の位置として得るようにしてもよい。
【0026】
本発明の実施例による画像計測装置の機能、すなわち本発明の実施例による画像計測方法につき、図1とともに説明する。
【0027】
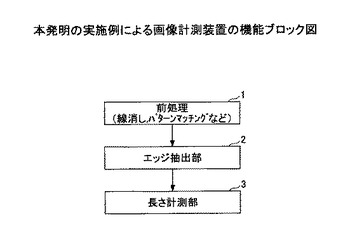
本発明の実施例による画像計測装置或いは画像計測方法は、前処理部1(すなわち前処理段階),エッジ抽出部2(すなわちエッジ抽出段階)及び長さ計測部3(すなわち長さ計測段階)を含む。
【0028】
前処理部1では与えられた画像に含まれる白線の除去等、以降の計測処理に不要な情報の除去等の前処理を行う。エッジ抽出部2では同画像に含まれるエッジの抽出を行い、長さ計測部3ではこのように抽出されたエッジに対し、計測を行う計測位置を定め、計測位置におけるエッジ間の距離を測定する。このようにして得られた測定値を基に、当該画像の基となった計測対象物が規定通りの寸法に製造されているか等のチェックを行う。
【0029】
以下、図1に示す構成の各部の機能を詳しく説明する。
【0030】
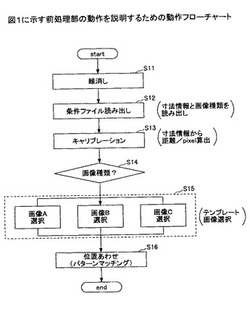
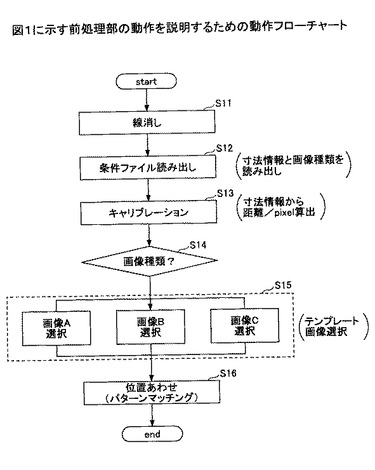
図2は前処理部1の機能を説明するための処理フローチャートである。
【0031】
ステップS11では、以降の処理に不要な白線を処理対象の画像データから除去し、ステップS12では処理対象の画像データに添付されている撮像条件データのファイルから当該画像データの種類、すなわち計測対象物の製造工程中のどの段階における撮像に係る画像かを示す情報と、キャリブレーション用の寸法情報、すなわち当該画像データとその基となった計測対象物の実際の寸法との関連を示す情報とを読み取る。
【0032】
そしてステップS13でキャリブレーションを行う。
【0033】
すなわち当該画像データにおける画素数と、当該画像データの基となった計測対象物の実際の寸法との対応関係、すなわち計測対象物の実際の単位長さに対応する画像データの画素数を求める演算を行う。
【0034】
又ステップS14では画像データの種類を判別する。ここでは上記撮像条件データのファイルから得られる情報、すなわち当該画像データが計測対象物の製造工程中のどの段階の撮像に係るものかを示す情報に応じて画像データの種類が選択される。
【0035】
そして、ステップS15にて、この選択結果に応じ、予め用意されている3種類の画像のいずれかによってステップS16にてパターンマッチングが行われる。このパターンマッチングによる位置合わせによって、次のエッジ抽出部2におけるエッジ抽出処理において使用される、図形の対称軸の位置が抽出される。
【0036】
すなわち、計測対象物の製造工程中のどの段階の撮像に係る画像データかの情報により、その撮像条件に合致したテンプレート画像が選択され、そのテンプレート画像とのテンプレートマッチングを行う。そしてテンプレート画像と処理対象の画像との間の類似度が最大となった状態の双方の相対位置関係における当該テンプレート画像の対称軸の位置を、処理対象画像の対称軸の位置として取得する。その結果、当該画像に含まれる図形の対称軸を精度良く抽出できる。
【0037】
これは異なる撮像条件で得られた画像間のパターンマッチングによる位置合わせでは、その間の類似度として十分高いものが得られないため、位置合わせの精度を高めることが困難であるが、他方同等の撮像条件で得られた画像間のパターンマッチングによる位置合わせでは、その間の類似度として十分高いものが得られるため、位置合わせの精度を高めることが可能なことによる。そこで上記テンプレート画像として処理対象画像の撮像条件と合致する撮像条件で得られた画像を用いることにより、パターンマッチングの位置合わせの精度向上が可能であり、もって画像に含まれる図形の対称軸を高精度に得ることが可能となる。
【0038】
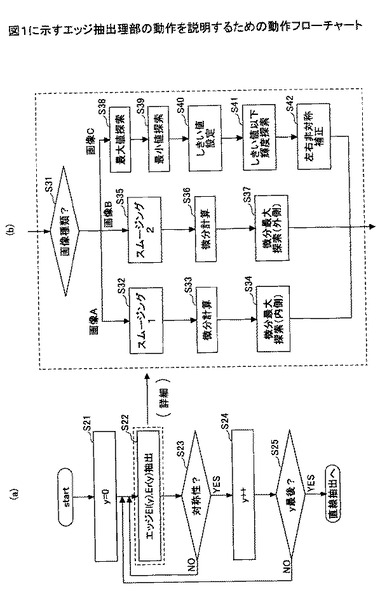
図3(a)はエッジ抽出部2が実行する処理について説明するための処理フローチャートである。
【0039】
まずステップS21では処理対象画像の輝度プロファイルを取得するための変数yがセットされる。ここで変数yとは、例えば図5に示す画像の例の場合、y座標、すなわち上下方向の座標に対応する。
【0040】
ステップS22では上記対称軸に対する左側のエッジEl(y)と右側のEr(y)とが抽出される。
【0041】
ステップS23ではこれら左右のエッジが対称軸に対して左右対称な位置にあるかどうかを判定する。判定の結果左右対称でないとされた場合(NO)、ステップS22が繰り返される。
【0042】
ここでステップS23で左右対称でないと判定された場合とは、ステップS22で抽出されたエッジが誤抽出によるものとの判定がなされた場合である。したがってその場合、ステップS22では更にエッジの探索を続行し、正しいエッジが探索され、ステップS23の判定結果がYESとなるまでこれが繰り返される。ただしエッジの探索が該当する探索範囲全体について実施された場合においても尚ステップS23の判定結果がYESとならない場合、この処理はエラー終了し、該当する変数yについて計測不能との結果を出力する。
【0043】
そしてステップS24では上記変数yに次の値をセットし、ステップS25では変数yの所定の範囲に対する処理が完了したかどうかを判定する。
【0044】
上記ステップS22のエッジ抽出処理の詳細につき、図3(b)とともに詳細に説明する。
【0045】
ステップS31では上記図2のステップS14の画像種類判定と同様の処理により、処理対象の画像データに添付された撮像条件データのファイルから撮像条件のデータを読み取ることにより、撮像対象の計測対象物の製造工程におけるどの段階の撮像に係る画像データかを判定し、その判定結果に応じて最適なエッジ抽出アルゴリズムを選択する。すなわち、微分値を用いてエッジ抽出(ステップS32〜S34或いはステップS35〜S37)を行うか、或いはしきい値処理によるエッジ抽出(ステップS38〜S42)を行うかを判断する。
【0046】
微分値を用いる方法は更にステップS32〜S34の処理と、ステップS35〜S37の処理とが含まれ、ステップS31ではその何れかが選択される。
【0047】
ステップS32とステップS35とでは異なるスムージング処理、すなわちフィルタ処理が実施される。その後ステップS33又はS36にて輝度プロファイル上の輝度値の微分値が算出される。そしてステップS34では上記対称軸から両側に向けて、エッジの内側で微分値の最大値を探索し、他方ステップS37ではエッジの外側から対称軸に向かって、エッジの外側で微分値の最大値を探索する。
【0048】
画像に含まれる図形のエッジの部分では、例えば図5、図6或いは図14に示される如く、その輝度プロファイルの傾きが急峻となる。したがって輝度プロファイル上の輝度値の微分値が最大の位置を求めることによりエッジの位置を求める方法、すなわちステップS32〜S34の処理或いはステップS35〜S37の処理が適用される。
【0049】
又、しきい値処理によるエッジ抽出アルゴリズムが選択された場合、ステップS38で輝度プロファイル上の輝度の最大値を探索し、ステップS39でその最小値を探索し、ステップS40でしきい値を設定する。
【0050】
ここでは例えばステップS38,S39で得られた輝度の最大値と最小値との差に対する所定の割合、例えば70%の値として、しきい値を得る。
【0051】
そしてステップS41にて、ここで得られたしきい値以下の輝度を探索することにより、輝度プロファイルが当該しきい値を横切る位置、すなわちエッジ位置を得る。そしてステップS42では、必要に応じ、図7とともに後述する左右非対称補正処理を行う。
【0052】
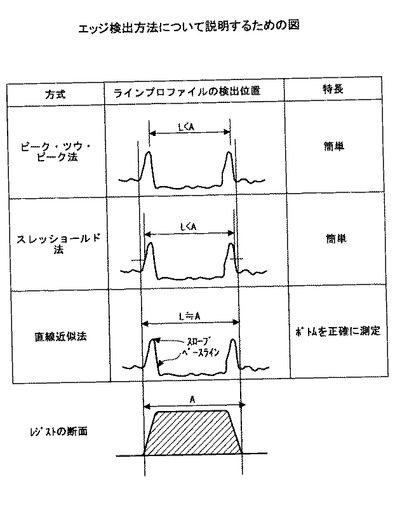
このしきい値処理、すなわちステップS38〜S42の処理は図14に示されるスレッショルド法によるものである。画像に含まれる図形のエッジの部分では、例えば図5、図6或いは図14に示される如く、その輝度プロファイル上で輝度値が急上昇する。したがって一定のしきい値を設け、そのしきい値を横切る点をエッジの位置と判断する方法、すなわちスレッショルド法が適用される。
【0053】
このように画像の種類によってエッジ抽出アルゴリズムを変えるのは以下の理由による。
【0054】
すなわち、計測対象物の製造工程中の段階によって計測対象物の形状或いは材質が異なるため、例えば製造工程において計測対象物上に設けられた突部等の所定の形状の輪郭、すなわちエッジにおける光の反射の度合いが異なる。このため、製造工程中のどの段階の画像かによって最適なエッジ抽出アルゴリズムが異なる。
【0055】
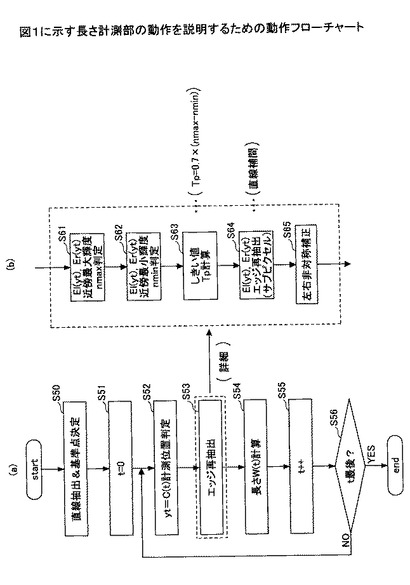
図4(a)は長さ計測部3が実行する処理について詳しく説明するための処理フローチャートである。
【0056】
ステップS50では、画像データに含まれる図形の輪郭を直線近似し、そのようにして得られた近似線を利用し、所定の方法で基準点を抽出する。
【0057】
これは画像データに含まれる図形から撮像対象の計測対象物中の特定の位置に対応する、当該画像中の位置を基準点として求め、当該基準点を基準として当該画像中、計測すべき位置を特定するためである。
【0058】
ステップS51では画像中、計測を行う複数の位置のうちの最初の位置に対応する番号を変数tにセットし、ステップS52で上記基準点と、図2中ステップS13のキャリブレーションで得られた単位寸法に対応する画素数から、画像中の計測すべき位置を特定する。
【0059】
ステップS53では、その計測すべき位置における画像データの輝度プロファイルから、所定のしきい値によるしきい値処理でエッジを求める。
【0060】
ステップS54では、そのようにして得られたエッジ間の幅から、求める長さW(t)を計算する。
【0061】
ステップS55では次の計測すべき位置に対応する番号を変数tにセットし、ステップS56で所定の複数の計測すべき位置の全てについてのW(t)値を取得したかを否かを判定する。
【0062】
判定の結果、未だ計測処理が住んでいない計測すべき位置が残っていた場合、ステップS52に戻り、上記処理を繰り返す。
【0063】
次に図4(b)とともに、ステップS53におけるエッジ再抽出処理について説明する。
【0064】
同図のステップS61及びS62では、輝度プロファイル上で、上記ステップS22で一旦求めたエッジの近傍で最大輝度および最小輝度を求める。そしてステップS63で再度しきい値を求め、そしてステップS64にて、再度しきい値処理によるエッジの再抽出を行う。又ステップS65では、図3(b)のステップS42の処理と同様の処理にて左右非対称補正処理を行う。
【0065】
ここでステップS61〜S65の処理は、基本的には図3(b)のステップS38〜S42の処理と同様であるが、その処理精度が高められている。特にステップS64のエッジ再抽出では上記ステップS41の場合と異なり、直線補間によるサブピクセル化を行う。その結果、ステップS64の長さ計測処理を行う場合、高精度で計測できるようにしている。
【0066】
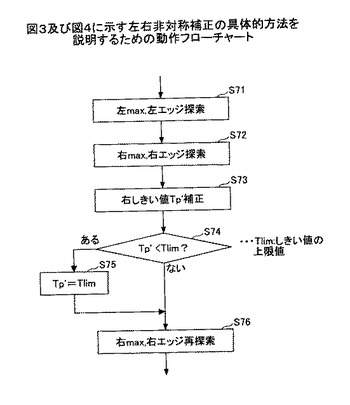
次に図3のステップS42及び上記ステップS65で行われる左右非対称補正について説明する。
【0067】
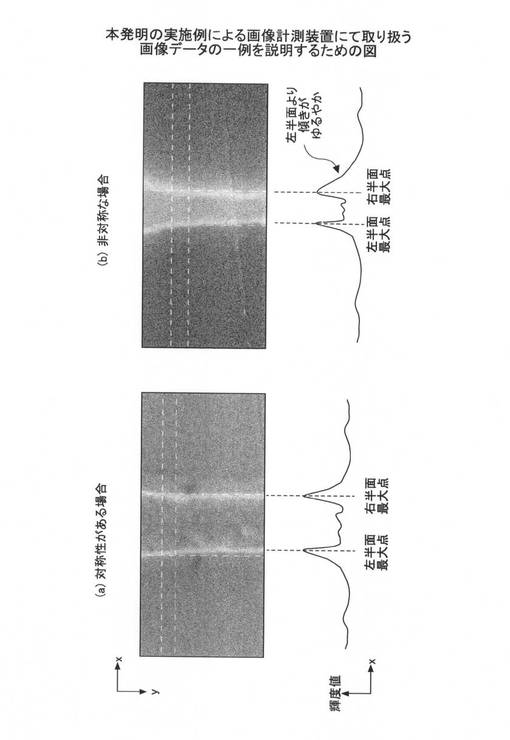
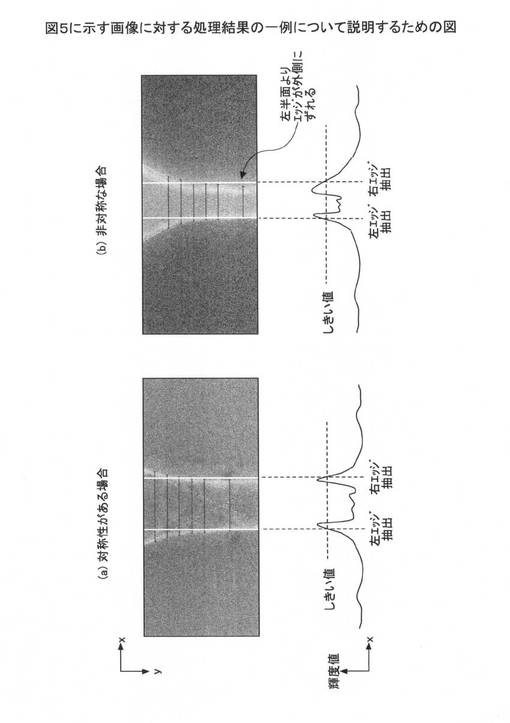
上記しきい値処理を行う対象となる計測対象物のCD−SEMの撮像による画像中に、例えば図5(b)に示される如く、左半面と右半面とで輝度プロファイルの傾きが異なる画像が含まれるような場合、当該画像に対して左右同じ値のしきい値を適用すると、図6(b)に示される如く、右半面のエッジが左半面のものに比べ、輝度最大点から離れた位置で検出される。
【0068】
その結果左右の輝度最大点と、検出されるエッジとの間の位置関係が不均衡となる。すなわち、図5(a)に示される如く、その輝度プロファイルが左右略対称である場合には、左右で等しいしきい値を用いても、図6(a)に示す如く、両側の輝度最大点(図中、「左半面最大点」或いは「右半面最大値」と表記)の外側で輝度プロファイルがしきい値を横切る点、すなわち抽出される左エッジ及び右エッジ(図中、「左エッジ抽出」、「右エッジ抽出」と表記)は、各々直近の輝度最大点から略等距離に存在する。
【0069】
他方図5(b)に示される如く、その輝度プロファイルが左右非対称である場合には、左右で等しいしきい値を用いると、図6(b)に示す如く、両側の輝度最大点(図中、「左半面最大点」或いは「右半面最大値」と表記)の外側で輝度プロファイルがしきい値を横切る点、すなわち抽出される左エッジ及び右エッジ(図中、「左エッジ抽出」、「右エッジ抽出」と表記)は、それぞれ直近の輝度最大点から異なる距離に存在する。このため上記不均衡が生ずる。
【0070】
この不均衡を修正するため、図7及び図8とともに後述するしきい値の補正を行い、この例の場合、右半面のエッジ抽出を行う際のしきい値を高く設定するようにする。
【0071】
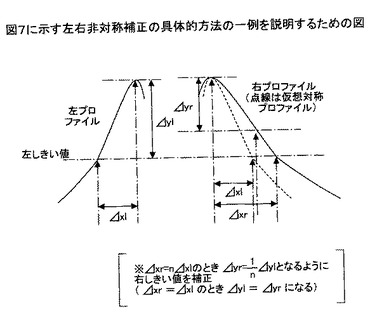
具体的には、図7のステップS71及びS72にて、上記しきい値処理にて左右のエッジをまず抽出する。その結果、例えば上記図5(b)の例の場合、図8に示される如く、右半面では輝度プロファイルの傾きが緩いことに起因して抽出されるエッジが、左半面の場合に比し、n倍外側に寄っている。すなわち、左側の輝度最大点と抽出されたエッジ点との距離Δxlに対し、右側の輝度最大点と抽出されたエッジ点との距離が、Δxr=nΔxlとなっている。
【0072】
そのような場合、ステップS73では、最大輝度値としきい値との差が1/nになるように、右側のしきい値を補正する。すなわち図8に示す如く、最大輝度値としきい値との差Δylに対し、右半面についてこれを1/nとする。すなわちΔyr=1/n×Δyrとなるように右側のしきい値を補正する。
【0073】
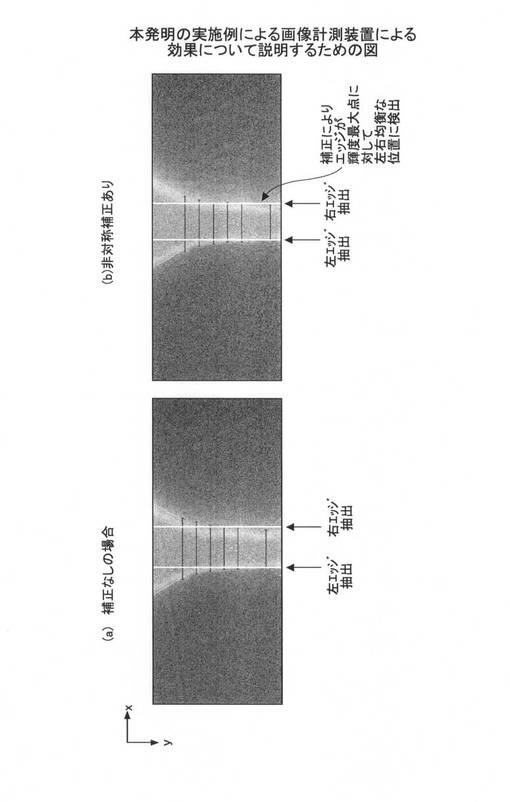
その結果、図9(b)に示される如く、右側のエッジが、補正のない場合、すなわち図9(a)の場合に比して、より内側で抽出されるようになり、結果的に左右ともに輝度最大点から略等しい距離だけ離れた位置でエッジ抽出が行えるようになる。
【0074】
これは、人間の視覚が非線形性を有し、輝度の変化という要因をも加味する機能を有することにより、人間が判断する図形のエッジは、単純にしきい値で規定された位置とは合致しない。したがってそのような人間の視覚が有する性質に対応させるべく、上記例では、右側につき、抽出されるエッジ位置が輝度最大点に近づくように補正を行っている。
【0075】
尚このような方法による補正では、しきい値が輝度最大値に極近い値となる場合が想定される。このようにしきい値が輝度最大点に極近い値になると、ノイズによって突発的に輝度が高くなった点がエッジとして誤検出されやすくなる。
【0076】
この弊害を防止するため補正後のしきい値に上限を設け、ステップS74ではその上限を越えていないかどうかの判定を行っている。
【0077】
上限を越える場合はステップS75でその上限値をしきい値に設定する。
【0078】
ステップS76では上記補正を行った側、すなわち上記例では右側につき、再度しきい値処理によってエッジを抽出する。
【0079】
又、本実施例では抽出図形の対称軸の位置を求める必要がある。本実施例では図2のステップS16でパターンマッチングを行うことで対称軸を求めている。
【0080】
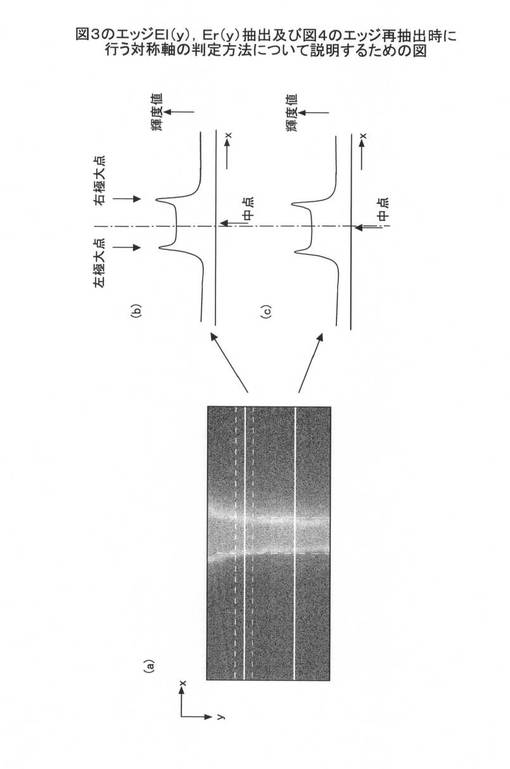
尚この方法以外にも、例えば図10に示される如く、輝度プロファイル上で左右両端から極大点を探索し、得られた極大点の中点を求める処理を、いくつかの異なるy座標で得られた輝度プロファイル、すなわち図10(a)の画像から得られた(b)、(c)の輝度プロファイル等に対して行い、このようにして求められた複数の中点のx座標の平均をとることによって対称軸を求めても良い。
【0081】
本実施例はCD−SEMによる撮像に係る画像の計測処理に対する本発明の適用例である。しかしながら、原理的には光学顕微鏡で撮像した画像に対しても同様の手法が適用可能である。
【0082】
本実施例の画像計測装置によれば最適なエッジ抽出アルゴリズムを選択することにより、計測対象物の製造工程中の個々の段階において計測対象物を撮像して得られる画像上の輝度分布及び輝度プロファイルが異なるような測定系においても、大量の画像を自動処理することができ、大量生産時の製品管理の効率を効果的に向上し得る。又、輝度プロファイルの傾きが左右非対称な画像に対しても、左右非対称補正処理を行うことにより、その影響を除去して左右の均衡性を得ながら計測処理を行うことができる。よって計測精度を効果的に向上可能である。
【0083】
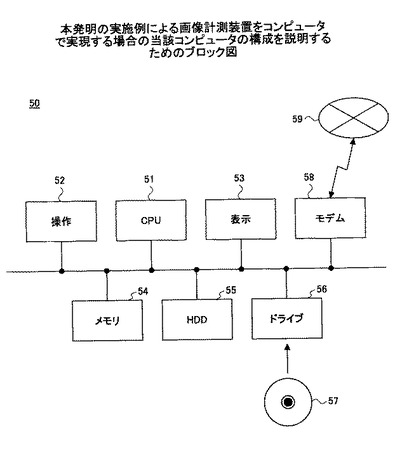
図18は本発明の各実施例を構成するコンピュータ50又は110の構成を示すブロック図である。
【0084】
図18に示すごとく、同コンピュータ50又は110は、与えられたプログラムを構成する命令を実行することによって様々な動作を実行するためのCPU51と、キーボード、マウス等よりなりユーザが操作内容又はデータを入力するための操作部52と、ユーザにCPU51による処理経過、処理結果等を表示するCRT、液晶表示器等よりなる表示部53と、ROM、RAM等よりなりCPU54が実行するプログラム、データ等を記憶したり作業領域として使用されるメモリ54と,プログラム、データ等を格納するハードディスク装置55と、CD−ROM57を媒介として外部からプログラムをロードしたりデータをロードするためのCD−ROMドライブ56と、インターネット、LAN等の通信網59を介して外部サーバからプログラムをダウンロード等するためのモデム58とを有する。
【0085】
同コンピュータ50、110はCD−ROM57を媒介として、あるいは通信ネットワーク59を媒介として、上述の実施例の画像計測装置が実行する計測処理、すなわち図1〜図10とともに上述の処理をCPU51に実行させるための命令よりなるプログラムをロードあるいはダウンロードする。そしてこれをハードディスク装置55にインストールし、適宜メモリ54にロードしてCPU51が実行する。その結果、同コンピュータ50、110により画像計測装置が実現される。
【0086】
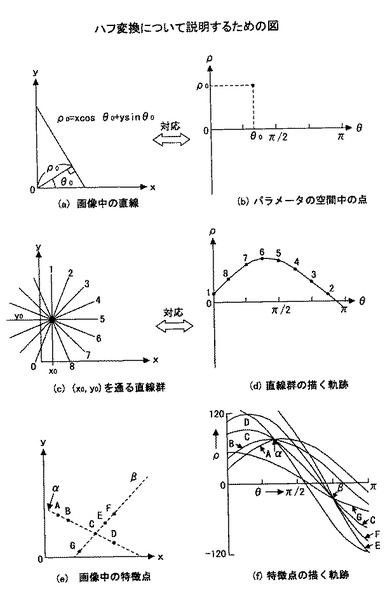
次に上記図4のステップS50において近似線を求める処理において、CD−SEMによる撮像で得られた画像に含まれる図形の輪郭の近似線を求めるためのハフ変換について説明する。
【0087】
ハフ(Hough)変換については、例えば田村秀行編「コンピュータ画像処理」(オーム社、2002)の204ページから206ページに以下の通り記載されている。
【0088】
すなわち、検出したい線の形が予め決められており、代数方程式でその形状が表現できる場合には、線の形状を表すパラメータ空間に画像中の特徴点(エッジ点など)を写像するハフ変換(Hough Transform)が有効であるとされている。ここでは最も標準的である直線検出用ハフ変換について述べる。
【0089】
まず直線を表す代数方程式としては、
ρ=xcosθ+ysinθ ...(B-1)
を用いる。
【0090】
上式中、ρは座標原点から直線に下ろした垂線の長さ、θは垂線とx軸との間の角度を表すパラメータである。この代数方程式を用いると、図13(a)に示すx−y画像空間中の直線ρ0=x0cosθ+y0sinθは、図13(b)に示すρ−θパラメータ空間中の1点として表される。
【0091】
また、画像中の特徴点(x0、y0)を通る任意の直線は
ρ=x0cosθ+y0sinθ ...(B-2)
と表され、この式を満たす直線群図13(c)は、パラメータ空間中で図13(d)のような軌跡を形作る。
【0092】
見方を変えると、このことは、画像空間中の点(x0、y0)が式(B−2)で表されるパラメータ空間中の軌跡に写像されることを意味する。
【0093】
こうした画像空間とパラメータ空間との関係に基づき、ハフ変換では次のようにして直線検出を行う。
【0094】
1)パラメータ空間を表す2次元配列を用意し、その値をすべて0に初期化する。
【0095】
2)画像中の各特徴点の座標値を式(B-1)のx、yに代入した式を、ρとθに関する方程式とみなし、パラメータ空間中でその方程式の表す軌跡を描く(図13(e)参照)。
【0096】
軌跡の描画は、θを一定間隔Δθずつ増加させながら方程式を満たすρの値を計算することによって軌跡の通過する配列要素を求め、その値を1増やす(投票する)ことによって軌跡を重ね書きする。
【0097】
3)すべての特徴点に対応する軌跡を描いた後、多数の軌跡が集中している位置、すなわち、パラメータ空間を表す配列中で大きな極大値をもつ要素を求める。
【0098】
そうした要素が表すパラメータを(ρ*、θ*)とする。このパラメータは画像中の直線ρ*=xcosθ*+ysinθ*を表し、多数の特徴点を通る直線が検出されたことになる(図13(e)、(f)参照)。
【0099】
ハフ変換は、画像中の特徴点が連続していなくてもうまく直線が検出でき、エッジの追跡などに比べて雑音にも強いとされている。このようにハフ変換は優れた特性をもっており、最初に提案された1962年以来非常に多くの改良、拡張がなされている。
【0100】
ハフ変換は、直線のほか、円や楕円の検出にも利用できる。ただし、円の場合はパラメータが3つ、楕円の場合は5つ必要であり、単純は方法では、それぞれ3次元、5次元の配列を用意する必要があり、記憶容量、計算時間ともにかなり大きくなるという問題があるとされている。
【0101】
この問題に対しても種々の工夫が考えられている。また、多角形など単純な代数方程式では表現できない2次元図形を検出するための方法として一般化ハフ変換がある。さらに、3次元の平面や物体の検出・認識にもハフ変換の考え方を利用することができる。
【0102】
次にエッジ抽出部2、或いは長さ計測部3のエッジ再抽出処理(図4中ステップS53)におけるエッジ抽出の方法について述べる。
【0103】
エッジ検出方法については、例えば社団法人、日本半導体製造装置協会のホームページにおけるロードマップ(平成15年度)(URL:http://www.seaj.or.jp/rdmp/indx_f.htm、2006年10月12日現在)の第5編「計測」に示されている。
【0104】
すなわち、顕微鏡画像の画素の輝度値のプロファイルを使用するものとして実際にCD−SEMに適用されているものとしては図14に示される各方式がある。又一般的には、他にも多数の方法があり、図3(b)とともに説明した如く、輝度値の微分値のプロファイルを使用する方法もある。図14中、Lは測長値を示し、Aは実際のパターン幅を示す。
【0105】
本発明は以下の付記の各々に記載の構成をとり得る。
(付記1)
計測対象物の撮像によって得られた画像データに、当該撮像に係る撮像条件データを添付されてなる画像データに基づいて前記計測対象物の計測を行う画像計測装置であって、
前記画像データに基づいて前記計測対象物上の所定の形状の輪郭に対応するエッジを抽出するエッジ抽出手段と、
エッジ抽出手段において適用されるエッジ抽出方法を前記画像データに添付された撮像条件データに基づいて決定するエッジ抽出方法決定手段とよりなる画像計測装置。
(付記2)
前記撮像条件データは、計測対象物の製造工程中の、当該撮像に係る段階を示すデータを含む構成とされてなる付記1に記載の画像計測装置。
(付記3)
前記エッジ抽出方法決定手段は、複数のエッジ抽出方法から一の方法を選択するものとされ、同複数のエッジ抽出方法は、画像データの輝度値を微分して微分値を得、その微分値が最大となる位置をエッジとして抽出する第1の方法と、画像データの輝度値に対し所定のしきい値を設定し、画像データの輝度値が同しきい値を横切る位置をエッジとして抽出する第2の方法とを含む構成とされてなる付記1又は2に記載の画像計測装置。
(付記4)
更に画像データによって示される図形の対称軸を取得する手段を有し、
前記第2の方法において対称軸の両側で異なるしきい値を設定する手段とを有する付記3に記載の画像計測装置。
(付記5)
前記対称軸の両側で異なるしきい値を設定する手段は、画像データの輝度値がピークを有する位置としきい値を有する位置との間の距離が対称軸の両側で相等しくなるようにしきい値を設定する構成とされてなる付記4に記載の画像計測装置。
(付記6)
前記画像データの輝度値のプロファイルがピークを有する位置としきい値を有する位置との間の距離が対称軸の両側で相等しくなるようにしきい値を設定する際に、輝度値の最大値及び最小値の差に対するしきい値の割合を用いて行う構成とされてなる付記5に記載の画像計測装置。
(付記7)
前記しきい値に所定の上限を設けてなる付記3乃至6のうちのいずれかに記載の画像計測装置。
(付記8)
前記対称軸を取得する手段は、予め基準となる画像を設け、同基準となる画像との間でパターンマッチングを行うことによって対称軸の位置を求める構成とされてなる付記4乃至7のうちのいずれかに記載の画像計測装置。
(付記9)
前記対称軸を取得する手段は、輝度値のプロファイルの極大値を求める動作を異なる計測位置で複数回行い、当該計測位置毎に前記輝度値のプロファイル上で極大値を有する位置の中点位置を求め、当該中点位置について前記複数回の計測の平均を求めることにより前記対称軸を求める構成とされてなる付記4乃至7のうちのいずれかに記載の画像計測装置。
(付記10)
計測対象物の撮像によって得られた画像データに、当該撮像に係る撮像条件データを添付する撮像条件添付段階と、
前記画像データに基づいて前記計測対象物の計測を行う計測段階とよりなり、
前記計測段階は、前記画像データに基づいて前記計測対象物上の所定の形状の輪郭に対応するエッジを抽出するエッジ抽出段階と、
エッジ抽出段階において適用するエッジ抽出方法を、前記撮像条件添付段階で当該画像データに添付された撮像条件データに基づいて決定するエッジ抽出方法決定段階とよりなる画像計測方法。
(付記11)
前記撮像条件データは、計測対象物の製造工程中の、当該撮像に係る段階を示すデータを含む構成とされてなる付記10に記載の方法。
(付記12)
前記エッジ抽出方法決定段階では複数のエッジ抽出方法から一の方法を選択するものとされ、同複数のエッジ抽出方法は、画像データの輝度値を微分して微分値を得、その微分値が最大となる位置をエッジとして抽出する第1の方法と、画像データの輝度値に対し所定のしきい値を設定し、画像データの輝度値が同しきい値を横切る位置をエッジとして抽出する第2の方法とを含む構成とされてなる付記10又は11に記載の方法。
(付記13)
更に画像データによって示される図形の対称軸を取得する段階を有し、
前記計測段階は、前記第2の方法において対称軸の両側で異なるしきい値を設定する段階とよりなる付記12に記載の方法。
(付記14)
前記対称軸の両側で異なるしきい値を設定する段階では、画像データの輝度値がピークを有する位置としきい値を有する位置との間の距離が対称軸の両側で相等しくなるようにしきい値を設定する構成とされてなる付記13に記載の方法。
(付記15)
前記画像データの輝度値のプロファイルがピークを有する位置としきい値を有する位置との間の距離が対称軸の両側で相等しくなるようにしきい値を設定する際に、輝度値の最大値及び最小値の差に対するしきい値の割合を用いて行う構成とされてなる付記14に記載の方法。
(付記16)
前記しきい値に所定の上限を設けてなる付記12乃至15のうちのいずれかに記載の方法。
(付記17)
前記対称軸を取得する段階では、予め基準となる画像を設け、同基準となる画像との間でパターンマッチングを行うことによって対称軸の位置を求める構成とされてなる付記13乃至16のうちのいずれかに記載の方法。
(付記18)
前記対称軸を取得する段階では、輝度値のプロファイルの極大値を求める動作を異なる計測位置で複数回行い、当該計測位置毎に前記輝度値のプロファイル上で極大値を有する位置の中点位置を求め、当該中点位置について前記複数回の計測の平均を求めることにより前記対称軸を求める構成とされてなる付記13乃至16のうちのいずれかに記載の方法。
(付記19)
計測対象物の撮像によって得られた画像データに、当該撮像に係る撮像条件データを添付してなる画像データに基づいて前記計測対象物の計測を行う計測段階をコンピュータに実行させるためのプログラムであって、
前記計測段階は、前記画像データに基づいて前記計測対象物上の所定の形状の輪郭に対応するエッジを抽出するエッジ抽出段階と、
エッジ抽出段階において適用するエッジ抽出方法を、前記撮像条件添付段階で当該画像データに添付された撮像条件データに基づいて決定するエッジ抽出方法決定段階とを含む構成とされてなるプログラム。
(付記20)
前記撮像条件データは、計測対象物の製造工程中の、当該撮像に係る段階を示すデータを含む構成とされてなる付記19に記載のプログラム。
【産業上の利用可能性】
【0106】
本発明の適用例としては、上述の如くの半導体装置、ハードディスク装置などの製造工程における走査型電子顕微鏡による画像に対する計測処理に対するもの限られない。例えば本発明は顕微鏡による画像を扱う全ての産業において適用可能である。又計測対象画像を得るための撮像装置としては上記走査型電子顕微鏡に限られず、光学顕微鏡、CCDカメラ、透過型電子顕微鏡等でもよく、本発明はこれらで撮像した画像に含まれる図形の計測にも適用可能である。
【図面の簡単な説明】
【0107】
【図1】本発明の実施例による画像計測装置の機能ブロック図である。
【図2】図1に示す前処理部の動作を説明するための動作フローチャートである。
【図3】図1に示すエッジ抽出理部の動作を説明するための動作フローチャートである。
【図4】図1に示す長さ計測部の動作を説明するための動作フローチャートである。
【図5】本発明の実施例による画像計測装置にて取り扱う画像データの一例を説明するための図である。
【図6】図5に示す画像に対する処理結果の一例について説明するための図である。
【図7】図3及び図4に示す左右非対称補正の具体的方法を説明するための動作フローチャートである。
【図8】図7に示す左右非対称補正の具体的方法の一例を説明するための図である。
【図9】本発明の実施例による画像計測装置による効果について説明するための図である。
【図10】図3のエッジEl(y),Er(y)抽出及び図4のエッジ再抽出時に行う対称軸の判定方法について説明するための図である。
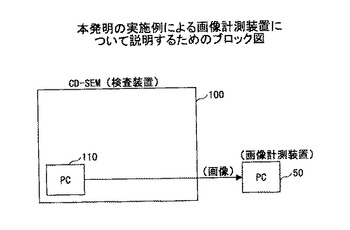
【図11】本発明の実施例による画像計測装置について説明するためのブロック図である。
【図12】本発明の実施例による画像計測装置をコンピュータで実現する場合の当該コンピュータの構成を説明するためのブロック図である。
【図13】ハフ変換について説明するための図である。
【図14】エッジ検出方法について説明するための図である。
【符号の説明】
【0108】
1 前処理部
2 エッジ抽出部
3 長さ計測部
50 画像計測装置
100 CD−SEM
【技術分野】
【0001】
本発明は画像計測装置、画像計測方法及びプログラムに係り、特に撮像によって得られた画像に基づいて計測対象物を計測するための画像計測装置、画像計測方法及びプログラムに関する。
【背景技術】
【0002】
測長用走査型電子顕微鏡、いわゆるCD−SEMを用いて計測対象物を撮像し、その画像データに基づいて当該計測対象物の特定箇所の長さを測定することによって、当該計測対象物の製造工程におけるプロセスの管理を行うことがなされている。この場合の計測対象物の例としては、例えば各種半導体装置、ハードディスク装置の記録・再生ヘッド等が挙げられる。
【0003】
ここでは撮像された画像中に特定の図形が存在することを想定し、その図形を構成するエッジ点を抽出する処理が行われる。この際には輝度値プロファイルを一方向に微分して得られる曲線を用いたエッジ抽出アルゴリズムが用いられる。
【0004】
しかしながらエッジ部分の輝度があまり明るくない画像に対しては微分カーブが急峻とならないため、しきい値を設定して輝度プロファイル曲線との交点を求めるエッジ抽出アルゴリズムが適する場合も考えられる。
【0005】
上記CD−SEMによって撮影された画像は、計測対象物の製造工程中のどの段階で撮像されたかによって、同じ部位に対するものであってもその輝度分布およびプロファイル形状が異なる場合がある。このため、上記微分によるエッジ抽出法が適した画像と、しきい値処理による方法が適した画像とが混在する可能性がある。この場合何らかの方法でエッジ抽出アルゴリズムを切り替える必要がある。尚このエッジ抽出アルゴリズムについては図14とともに後述する。
【特許文献1】特開2006−217082号公報
【発明の開示】
【発明が解決しようとする課題】
【0006】
本発明は上記課題に鑑みてなされたものであり、計測対象物の画像データに基づいて当該計測対象物の計測を行うに当たり、自動的に最適なエッジ抽出法が適用される構成を提供することを目的とする。
【課題を解決するための手段】
【0007】
本発明では、計測対象物の画像データに、当該画像の撮像に係る撮像条件データを添付しておき、当該画像データに基づいて前記計測対象物の計測を行うために当該計測対象物に設けられた所定の形状の輪郭に対応するエッジを抽出する際、当該画像データに添付された撮像条件データに基づいて当該画像データについて適用するエッジ抽出方法を決定するようにした。
【0008】
尚ここで撮像条件データの添付は、例えば画像データのファイルとこれに対応する撮像条件データのファイルとをコンピュータのハードディスク装置等の記憶装置における同じディレクトリに格納することで実現可能である。
【0009】
本発明によれば、操作者は予め計測対象物の画像データの各々に対し、該当する撮像条件データを添付しておき、当該撮像条件データが添付された画像データを画像計測装置の記憶装置に格納しておくことにより、画像計測装置にこれら画像データに対する計測動作を順次自動実行させることが可能となる。
【0010】
従来は計測対象物の画像データに対する計測処理を自動的に実行させようとしても、各画像データの処理において、そのエッジ抽出法の決定の工程で操作者自身が当該画像データを目視して最適なエッジ抽出法を判断する必要があった。このため計測処理の実行がその都度中断されることになってしまう。
【0011】
これに対し本発明では予め画像計測装置にセットする画像データに対して最適なエッジ抽出法の決定のための撮像条件データを添付するようにしたため、計測処理の効果的な効率向上が図り得る。
【0012】
尚ここで画像データの撮像条件データとは、当該画像データが計測対象物の製造工程中のどの段階における撮像で得られたものかを示すデータである。よって操作者が当該画像データを当該計測対象物の撮像によって得る際に取得可能なデータであり、その際に添付しておくことが可能である。
【0013】
そして処理対象の画像データが得られたのが計測対象物の製造工程中のどの段階における撮像によるものかを示すこの撮像条件データを参照することにより、画像計測装置が自動的に対応するエッジ抽出法を決定可能な構成を設けておけばよい。例えば撮像条件データとこれに対する最適なエッジ抽出法との関係を予めテーブル化しておき、画像計測装置がこのテーブルを参照することによって与えられた画像データの撮像条件データに対する最適なエッジ抽出法を自動的に決定可能な構成とすることが可能である。
【発明の効果】
【0014】
本発明によれば計測対象物の画像データに基づく当該計測対象物の計測処理の効率を効果的に向上し得る。
【発明を実施するための最良の形態】
【0015】
以下本発明の実施例の構成について詳細に説明する。
【0016】
本発明の実施例では、CD−SEMによって計測対象物の画像を撮影する際に該当する撮影条件データのファイルを添付しておく。そして実際の計測処理時、同ファイルから画像の撮像条件データを読み出すことによってその画像の種類を特定し、その特定結果に基づいてエッジ抽出アルゴリズム、すなわちエッジ抽出法を決定する構成を設けた。
【0017】
すなわち、与えられた画像が当該計測対象物の製造工程におけるどの段階で撮像されたものかを予め撮像条件データのファイルに記録しておき、同画像に基づくエッジ抽出処理の際、その撮像条件データのファイル内の文字列に基づいて最適なエッジ抽出アルゴリズムが自動的に選択されるようにした。
【0018】
本発明の実施例による画像計測装置によれば、計測対象物の撮像時に、その撮像条件データが別ファイルとして計測対象物の画像に添付され、同画像から図形が抽出され、これに基づいて計測処理がなされる。その添付された撮像条件データは実際の計測処理の前に読み出され、その読み出された撮像条件データに応じて最適なエッジ抽出アルゴリズムが選択される。
【0019】
更に、計測対象物の画像から1次元の輝度プロファイルが取り出され、その輝度プロファイルに対し、上記抽出に係る図形の対称軸の位置を検索する処理がなされる。そしてこの輝度プロファイルから前記図形を構成するエッジ点を抽出する際、この対称軸の右側のエッジと左側のエッジとに対して個別にしきい値処理がなされることでエッジ点を抽出する処理がなされる。又、同輝度プロファイルの形状が非対称であった場合、片側のしきい値を適宜補正してエッジを再抽出する。
【0020】
又このように一旦上記しきい値処理を行ってエッジ点の抽出を行い、その結果から非対称との判定がなされた際に一方のエッジを再抽出する場合には以下の動作を行う。
【0021】
すなわち上記輝度プロファイル上、エッジ抽出点と輝度最大点との距離が大きい方を補正対象とする。そして同補正対象のエッジ抽出点とそのしきい値判定に用いた輝度最大点との距離が他方のエッジ抽出点と対応する輝度最大点との距離のn倍であるとき、上記しきい値判定に用いた輝度最大値と補正対象のしきい値との差が他の輝度最大値と対応するしきい値との差の1/n倍になるように、当該補正対象のしきい値を補正する。そして補正対象につき、その補正したしきい値によって再度しきい値処理を行ってエッジを再抽出を実行する。
【0022】
又、このように輝度最大値としきい値との差を適用してしきい値の補正に用いる代わりに、輝度最大値と輝度最小値との差に対するしきい値の割合を適用してしきい値の補正を行うようにしてもよい。
【0023】
又、しきい値の補正を行う際、あらかじめ補正後のしきい値の上限を設定しておく。
【0024】
又、上記対称軸の位置を判定する際、あらかじめ対称軸近傍の画像を教師画像データとして設定しておき、その教師画像とのパターンマッチングにより処理対象画像における対称軸の位置を判定する。
【0025】
或いはこの場合においてパターンマッチングを用いる代わりに、輝度プロファイルの右側から探索した際に得られる極大点と同輝度プロファイルの左側から探索した際に得られる極大点との中点を候補点とする操作を探索位置を変えて少なくとも2回行い、そのようにして得られた複数の候補点の平均をとることによって得られた位置を真の対称軸の位置として得るようにしてもよい。
【0026】
本発明の実施例による画像計測装置の機能、すなわち本発明の実施例による画像計測方法につき、図1とともに説明する。
【0027】
本発明の実施例による画像計測装置或いは画像計測方法は、前処理部1(すなわち前処理段階),エッジ抽出部2(すなわちエッジ抽出段階)及び長さ計測部3(すなわち長さ計測段階)を含む。
【0028】
前処理部1では与えられた画像に含まれる白線の除去等、以降の計測処理に不要な情報の除去等の前処理を行う。エッジ抽出部2では同画像に含まれるエッジの抽出を行い、長さ計測部3ではこのように抽出されたエッジに対し、計測を行う計測位置を定め、計測位置におけるエッジ間の距離を測定する。このようにして得られた測定値を基に、当該画像の基となった計測対象物が規定通りの寸法に製造されているか等のチェックを行う。
【0029】
以下、図1に示す構成の各部の機能を詳しく説明する。
【0030】
図2は前処理部1の機能を説明するための処理フローチャートである。
【0031】
ステップS11では、以降の処理に不要な白線を処理対象の画像データから除去し、ステップS12では処理対象の画像データに添付されている撮像条件データのファイルから当該画像データの種類、すなわち計測対象物の製造工程中のどの段階における撮像に係る画像かを示す情報と、キャリブレーション用の寸法情報、すなわち当該画像データとその基となった計測対象物の実際の寸法との関連を示す情報とを読み取る。
【0032】
そしてステップS13でキャリブレーションを行う。
【0033】
すなわち当該画像データにおける画素数と、当該画像データの基となった計測対象物の実際の寸法との対応関係、すなわち計測対象物の実際の単位長さに対応する画像データの画素数を求める演算を行う。
【0034】
又ステップS14では画像データの種類を判別する。ここでは上記撮像条件データのファイルから得られる情報、すなわち当該画像データが計測対象物の製造工程中のどの段階の撮像に係るものかを示す情報に応じて画像データの種類が選択される。
【0035】
そして、ステップS15にて、この選択結果に応じ、予め用意されている3種類の画像のいずれかによってステップS16にてパターンマッチングが行われる。このパターンマッチングによる位置合わせによって、次のエッジ抽出部2におけるエッジ抽出処理において使用される、図形の対称軸の位置が抽出される。
【0036】
すなわち、計測対象物の製造工程中のどの段階の撮像に係る画像データかの情報により、その撮像条件に合致したテンプレート画像が選択され、そのテンプレート画像とのテンプレートマッチングを行う。そしてテンプレート画像と処理対象の画像との間の類似度が最大となった状態の双方の相対位置関係における当該テンプレート画像の対称軸の位置を、処理対象画像の対称軸の位置として取得する。その結果、当該画像に含まれる図形の対称軸を精度良く抽出できる。
【0037】
これは異なる撮像条件で得られた画像間のパターンマッチングによる位置合わせでは、その間の類似度として十分高いものが得られないため、位置合わせの精度を高めることが困難であるが、他方同等の撮像条件で得られた画像間のパターンマッチングによる位置合わせでは、その間の類似度として十分高いものが得られるため、位置合わせの精度を高めることが可能なことによる。そこで上記テンプレート画像として処理対象画像の撮像条件と合致する撮像条件で得られた画像を用いることにより、パターンマッチングの位置合わせの精度向上が可能であり、もって画像に含まれる図形の対称軸を高精度に得ることが可能となる。
【0038】
図3(a)はエッジ抽出部2が実行する処理について説明するための処理フローチャートである。
【0039】
まずステップS21では処理対象画像の輝度プロファイルを取得するための変数yがセットされる。ここで変数yとは、例えば図5に示す画像の例の場合、y座標、すなわち上下方向の座標に対応する。
【0040】
ステップS22では上記対称軸に対する左側のエッジEl(y)と右側のEr(y)とが抽出される。
【0041】
ステップS23ではこれら左右のエッジが対称軸に対して左右対称な位置にあるかどうかを判定する。判定の結果左右対称でないとされた場合(NO)、ステップS22が繰り返される。
【0042】
ここでステップS23で左右対称でないと判定された場合とは、ステップS22で抽出されたエッジが誤抽出によるものとの判定がなされた場合である。したがってその場合、ステップS22では更にエッジの探索を続行し、正しいエッジが探索され、ステップS23の判定結果がYESとなるまでこれが繰り返される。ただしエッジの探索が該当する探索範囲全体について実施された場合においても尚ステップS23の判定結果がYESとならない場合、この処理はエラー終了し、該当する変数yについて計測不能との結果を出力する。
【0043】
そしてステップS24では上記変数yに次の値をセットし、ステップS25では変数yの所定の範囲に対する処理が完了したかどうかを判定する。
【0044】
上記ステップS22のエッジ抽出処理の詳細につき、図3(b)とともに詳細に説明する。
【0045】
ステップS31では上記図2のステップS14の画像種類判定と同様の処理により、処理対象の画像データに添付された撮像条件データのファイルから撮像条件のデータを読み取ることにより、撮像対象の計測対象物の製造工程におけるどの段階の撮像に係る画像データかを判定し、その判定結果に応じて最適なエッジ抽出アルゴリズムを選択する。すなわち、微分値を用いてエッジ抽出(ステップS32〜S34或いはステップS35〜S37)を行うか、或いはしきい値処理によるエッジ抽出(ステップS38〜S42)を行うかを判断する。
【0046】
微分値を用いる方法は更にステップS32〜S34の処理と、ステップS35〜S37の処理とが含まれ、ステップS31ではその何れかが選択される。
【0047】
ステップS32とステップS35とでは異なるスムージング処理、すなわちフィルタ処理が実施される。その後ステップS33又はS36にて輝度プロファイル上の輝度値の微分値が算出される。そしてステップS34では上記対称軸から両側に向けて、エッジの内側で微分値の最大値を探索し、他方ステップS37ではエッジの外側から対称軸に向かって、エッジの外側で微分値の最大値を探索する。
【0048】
画像に含まれる図形のエッジの部分では、例えば図5、図6或いは図14に示される如く、その輝度プロファイルの傾きが急峻となる。したがって輝度プロファイル上の輝度値の微分値が最大の位置を求めることによりエッジの位置を求める方法、すなわちステップS32〜S34の処理或いはステップS35〜S37の処理が適用される。
【0049】
又、しきい値処理によるエッジ抽出アルゴリズムが選択された場合、ステップS38で輝度プロファイル上の輝度の最大値を探索し、ステップS39でその最小値を探索し、ステップS40でしきい値を設定する。
【0050】
ここでは例えばステップS38,S39で得られた輝度の最大値と最小値との差に対する所定の割合、例えば70%の値として、しきい値を得る。
【0051】
そしてステップS41にて、ここで得られたしきい値以下の輝度を探索することにより、輝度プロファイルが当該しきい値を横切る位置、すなわちエッジ位置を得る。そしてステップS42では、必要に応じ、図7とともに後述する左右非対称補正処理を行う。
【0052】
このしきい値処理、すなわちステップS38〜S42の処理は図14に示されるスレッショルド法によるものである。画像に含まれる図形のエッジの部分では、例えば図5、図6或いは図14に示される如く、その輝度プロファイル上で輝度値が急上昇する。したがって一定のしきい値を設け、そのしきい値を横切る点をエッジの位置と判断する方法、すなわちスレッショルド法が適用される。
【0053】
このように画像の種類によってエッジ抽出アルゴリズムを変えるのは以下の理由による。
【0054】
すなわち、計測対象物の製造工程中の段階によって計測対象物の形状或いは材質が異なるため、例えば製造工程において計測対象物上に設けられた突部等の所定の形状の輪郭、すなわちエッジにおける光の反射の度合いが異なる。このため、製造工程中のどの段階の画像かによって最適なエッジ抽出アルゴリズムが異なる。
【0055】
図4(a)は長さ計測部3が実行する処理について詳しく説明するための処理フローチャートである。
【0056】
ステップS50では、画像データに含まれる図形の輪郭を直線近似し、そのようにして得られた近似線を利用し、所定の方法で基準点を抽出する。
【0057】
これは画像データに含まれる図形から撮像対象の計測対象物中の特定の位置に対応する、当該画像中の位置を基準点として求め、当該基準点を基準として当該画像中、計測すべき位置を特定するためである。
【0058】
ステップS51では画像中、計測を行う複数の位置のうちの最初の位置に対応する番号を変数tにセットし、ステップS52で上記基準点と、図2中ステップS13のキャリブレーションで得られた単位寸法に対応する画素数から、画像中の計測すべき位置を特定する。
【0059】
ステップS53では、その計測すべき位置における画像データの輝度プロファイルから、所定のしきい値によるしきい値処理でエッジを求める。
【0060】
ステップS54では、そのようにして得られたエッジ間の幅から、求める長さW(t)を計算する。
【0061】
ステップS55では次の計測すべき位置に対応する番号を変数tにセットし、ステップS56で所定の複数の計測すべき位置の全てについてのW(t)値を取得したかを否かを判定する。
【0062】
判定の結果、未だ計測処理が住んでいない計測すべき位置が残っていた場合、ステップS52に戻り、上記処理を繰り返す。
【0063】
次に図4(b)とともに、ステップS53におけるエッジ再抽出処理について説明する。
【0064】
同図のステップS61及びS62では、輝度プロファイル上で、上記ステップS22で一旦求めたエッジの近傍で最大輝度および最小輝度を求める。そしてステップS63で再度しきい値を求め、そしてステップS64にて、再度しきい値処理によるエッジの再抽出を行う。又ステップS65では、図3(b)のステップS42の処理と同様の処理にて左右非対称補正処理を行う。
【0065】
ここでステップS61〜S65の処理は、基本的には図3(b)のステップS38〜S42の処理と同様であるが、その処理精度が高められている。特にステップS64のエッジ再抽出では上記ステップS41の場合と異なり、直線補間によるサブピクセル化を行う。その結果、ステップS64の長さ計測処理を行う場合、高精度で計測できるようにしている。
【0066】
次に図3のステップS42及び上記ステップS65で行われる左右非対称補正について説明する。
【0067】
上記しきい値処理を行う対象となる計測対象物のCD−SEMの撮像による画像中に、例えば図5(b)に示される如く、左半面と右半面とで輝度プロファイルの傾きが異なる画像が含まれるような場合、当該画像に対して左右同じ値のしきい値を適用すると、図6(b)に示される如く、右半面のエッジが左半面のものに比べ、輝度最大点から離れた位置で検出される。
【0068】
その結果左右の輝度最大点と、検出されるエッジとの間の位置関係が不均衡となる。すなわち、図5(a)に示される如く、その輝度プロファイルが左右略対称である場合には、左右で等しいしきい値を用いても、図6(a)に示す如く、両側の輝度最大点(図中、「左半面最大点」或いは「右半面最大値」と表記)の外側で輝度プロファイルがしきい値を横切る点、すなわち抽出される左エッジ及び右エッジ(図中、「左エッジ抽出」、「右エッジ抽出」と表記)は、各々直近の輝度最大点から略等距離に存在する。
【0069】
他方図5(b)に示される如く、その輝度プロファイルが左右非対称である場合には、左右で等しいしきい値を用いると、図6(b)に示す如く、両側の輝度最大点(図中、「左半面最大点」或いは「右半面最大値」と表記)の外側で輝度プロファイルがしきい値を横切る点、すなわち抽出される左エッジ及び右エッジ(図中、「左エッジ抽出」、「右エッジ抽出」と表記)は、それぞれ直近の輝度最大点から異なる距離に存在する。このため上記不均衡が生ずる。
【0070】
この不均衡を修正するため、図7及び図8とともに後述するしきい値の補正を行い、この例の場合、右半面のエッジ抽出を行う際のしきい値を高く設定するようにする。
【0071】
具体的には、図7のステップS71及びS72にて、上記しきい値処理にて左右のエッジをまず抽出する。その結果、例えば上記図5(b)の例の場合、図8に示される如く、右半面では輝度プロファイルの傾きが緩いことに起因して抽出されるエッジが、左半面の場合に比し、n倍外側に寄っている。すなわち、左側の輝度最大点と抽出されたエッジ点との距離Δxlに対し、右側の輝度最大点と抽出されたエッジ点との距離が、Δxr=nΔxlとなっている。
【0072】
そのような場合、ステップS73では、最大輝度値としきい値との差が1/nになるように、右側のしきい値を補正する。すなわち図8に示す如く、最大輝度値としきい値との差Δylに対し、右半面についてこれを1/nとする。すなわちΔyr=1/n×Δyrとなるように右側のしきい値を補正する。
【0073】
その結果、図9(b)に示される如く、右側のエッジが、補正のない場合、すなわち図9(a)の場合に比して、より内側で抽出されるようになり、結果的に左右ともに輝度最大点から略等しい距離だけ離れた位置でエッジ抽出が行えるようになる。
【0074】
これは、人間の視覚が非線形性を有し、輝度の変化という要因をも加味する機能を有することにより、人間が判断する図形のエッジは、単純にしきい値で規定された位置とは合致しない。したがってそのような人間の視覚が有する性質に対応させるべく、上記例では、右側につき、抽出されるエッジ位置が輝度最大点に近づくように補正を行っている。
【0075】
尚このような方法による補正では、しきい値が輝度最大値に極近い値となる場合が想定される。このようにしきい値が輝度最大点に極近い値になると、ノイズによって突発的に輝度が高くなった点がエッジとして誤検出されやすくなる。
【0076】
この弊害を防止するため補正後のしきい値に上限を設け、ステップS74ではその上限を越えていないかどうかの判定を行っている。
【0077】
上限を越える場合はステップS75でその上限値をしきい値に設定する。
【0078】
ステップS76では上記補正を行った側、すなわち上記例では右側につき、再度しきい値処理によってエッジを抽出する。
【0079】
又、本実施例では抽出図形の対称軸の位置を求める必要がある。本実施例では図2のステップS16でパターンマッチングを行うことで対称軸を求めている。
【0080】
尚この方法以外にも、例えば図10に示される如く、輝度プロファイル上で左右両端から極大点を探索し、得られた極大点の中点を求める処理を、いくつかの異なるy座標で得られた輝度プロファイル、すなわち図10(a)の画像から得られた(b)、(c)の輝度プロファイル等に対して行い、このようにして求められた複数の中点のx座標の平均をとることによって対称軸を求めても良い。
【0081】
本実施例はCD−SEMによる撮像に係る画像の計測処理に対する本発明の適用例である。しかしながら、原理的には光学顕微鏡で撮像した画像に対しても同様の手法が適用可能である。
【0082】
本実施例の画像計測装置によれば最適なエッジ抽出アルゴリズムを選択することにより、計測対象物の製造工程中の個々の段階において計測対象物を撮像して得られる画像上の輝度分布及び輝度プロファイルが異なるような測定系においても、大量の画像を自動処理することができ、大量生産時の製品管理の効率を効果的に向上し得る。又、輝度プロファイルの傾きが左右非対称な画像に対しても、左右非対称補正処理を行うことにより、その影響を除去して左右の均衡性を得ながら計測処理を行うことができる。よって計測精度を効果的に向上可能である。
【0083】
図18は本発明の各実施例を構成するコンピュータ50又は110の構成を示すブロック図である。
【0084】
図18に示すごとく、同コンピュータ50又は110は、与えられたプログラムを構成する命令を実行することによって様々な動作を実行するためのCPU51と、キーボード、マウス等よりなりユーザが操作内容又はデータを入力するための操作部52と、ユーザにCPU51による処理経過、処理結果等を表示するCRT、液晶表示器等よりなる表示部53と、ROM、RAM等よりなりCPU54が実行するプログラム、データ等を記憶したり作業領域として使用されるメモリ54と,プログラム、データ等を格納するハードディスク装置55と、CD−ROM57を媒介として外部からプログラムをロードしたりデータをロードするためのCD−ROMドライブ56と、インターネット、LAN等の通信網59を介して外部サーバからプログラムをダウンロード等するためのモデム58とを有する。
【0085】
同コンピュータ50、110はCD−ROM57を媒介として、あるいは通信ネットワーク59を媒介として、上述の実施例の画像計測装置が実行する計測処理、すなわち図1〜図10とともに上述の処理をCPU51に実行させるための命令よりなるプログラムをロードあるいはダウンロードする。そしてこれをハードディスク装置55にインストールし、適宜メモリ54にロードしてCPU51が実行する。その結果、同コンピュータ50、110により画像計測装置が実現される。
【0086】
次に上記図4のステップS50において近似線を求める処理において、CD−SEMによる撮像で得られた画像に含まれる図形の輪郭の近似線を求めるためのハフ変換について説明する。
【0087】
ハフ(Hough)変換については、例えば田村秀行編「コンピュータ画像処理」(オーム社、2002)の204ページから206ページに以下の通り記載されている。
【0088】
すなわち、検出したい線の形が予め決められており、代数方程式でその形状が表現できる場合には、線の形状を表すパラメータ空間に画像中の特徴点(エッジ点など)を写像するハフ変換(Hough Transform)が有効であるとされている。ここでは最も標準的である直線検出用ハフ変換について述べる。
【0089】
まず直線を表す代数方程式としては、
ρ=xcosθ+ysinθ ...(B-1)
を用いる。
【0090】
上式中、ρは座標原点から直線に下ろした垂線の長さ、θは垂線とx軸との間の角度を表すパラメータである。この代数方程式を用いると、図13(a)に示すx−y画像空間中の直線ρ0=x0cosθ+y0sinθは、図13(b)に示すρ−θパラメータ空間中の1点として表される。
【0091】
また、画像中の特徴点(x0、y0)を通る任意の直線は
ρ=x0cosθ+y0sinθ ...(B-2)
と表され、この式を満たす直線群図13(c)は、パラメータ空間中で図13(d)のような軌跡を形作る。
【0092】
見方を変えると、このことは、画像空間中の点(x0、y0)が式(B−2)で表されるパラメータ空間中の軌跡に写像されることを意味する。
【0093】
こうした画像空間とパラメータ空間との関係に基づき、ハフ変換では次のようにして直線検出を行う。
【0094】
1)パラメータ空間を表す2次元配列を用意し、その値をすべて0に初期化する。
【0095】
2)画像中の各特徴点の座標値を式(B-1)のx、yに代入した式を、ρとθに関する方程式とみなし、パラメータ空間中でその方程式の表す軌跡を描く(図13(e)参照)。
【0096】
軌跡の描画は、θを一定間隔Δθずつ増加させながら方程式を満たすρの値を計算することによって軌跡の通過する配列要素を求め、その値を1増やす(投票する)ことによって軌跡を重ね書きする。
【0097】
3)すべての特徴点に対応する軌跡を描いた後、多数の軌跡が集中している位置、すなわち、パラメータ空間を表す配列中で大きな極大値をもつ要素を求める。
【0098】
そうした要素が表すパラメータを(ρ*、θ*)とする。このパラメータは画像中の直線ρ*=xcosθ*+ysinθ*を表し、多数の特徴点を通る直線が検出されたことになる(図13(e)、(f)参照)。
【0099】
ハフ変換は、画像中の特徴点が連続していなくてもうまく直線が検出でき、エッジの追跡などに比べて雑音にも強いとされている。このようにハフ変換は優れた特性をもっており、最初に提案された1962年以来非常に多くの改良、拡張がなされている。
【0100】
ハフ変換は、直線のほか、円や楕円の検出にも利用できる。ただし、円の場合はパラメータが3つ、楕円の場合は5つ必要であり、単純は方法では、それぞれ3次元、5次元の配列を用意する必要があり、記憶容量、計算時間ともにかなり大きくなるという問題があるとされている。
【0101】
この問題に対しても種々の工夫が考えられている。また、多角形など単純な代数方程式では表現できない2次元図形を検出するための方法として一般化ハフ変換がある。さらに、3次元の平面や物体の検出・認識にもハフ変換の考え方を利用することができる。
【0102】
次にエッジ抽出部2、或いは長さ計測部3のエッジ再抽出処理(図4中ステップS53)におけるエッジ抽出の方法について述べる。
【0103】
エッジ検出方法については、例えば社団法人、日本半導体製造装置協会のホームページにおけるロードマップ(平成15年度)(URL:http://www.seaj.or.jp/rdmp/indx_f.htm、2006年10月12日現在)の第5編「計測」に示されている。
【0104】
すなわち、顕微鏡画像の画素の輝度値のプロファイルを使用するものとして実際にCD−SEMに適用されているものとしては図14に示される各方式がある。又一般的には、他にも多数の方法があり、図3(b)とともに説明した如く、輝度値の微分値のプロファイルを使用する方法もある。図14中、Lは測長値を示し、Aは実際のパターン幅を示す。
【0105】
本発明は以下の付記の各々に記載の構成をとり得る。
(付記1)
計測対象物の撮像によって得られた画像データに、当該撮像に係る撮像条件データを添付されてなる画像データに基づいて前記計測対象物の計測を行う画像計測装置であって、
前記画像データに基づいて前記計測対象物上の所定の形状の輪郭に対応するエッジを抽出するエッジ抽出手段と、
エッジ抽出手段において適用されるエッジ抽出方法を前記画像データに添付された撮像条件データに基づいて決定するエッジ抽出方法決定手段とよりなる画像計測装置。
(付記2)
前記撮像条件データは、計測対象物の製造工程中の、当該撮像に係る段階を示すデータを含む構成とされてなる付記1に記載の画像計測装置。
(付記3)
前記エッジ抽出方法決定手段は、複数のエッジ抽出方法から一の方法を選択するものとされ、同複数のエッジ抽出方法は、画像データの輝度値を微分して微分値を得、その微分値が最大となる位置をエッジとして抽出する第1の方法と、画像データの輝度値に対し所定のしきい値を設定し、画像データの輝度値が同しきい値を横切る位置をエッジとして抽出する第2の方法とを含む構成とされてなる付記1又は2に記載の画像計測装置。
(付記4)
更に画像データによって示される図形の対称軸を取得する手段を有し、
前記第2の方法において対称軸の両側で異なるしきい値を設定する手段とを有する付記3に記載の画像計測装置。
(付記5)
前記対称軸の両側で異なるしきい値を設定する手段は、画像データの輝度値がピークを有する位置としきい値を有する位置との間の距離が対称軸の両側で相等しくなるようにしきい値を設定する構成とされてなる付記4に記載の画像計測装置。
(付記6)
前記画像データの輝度値のプロファイルがピークを有する位置としきい値を有する位置との間の距離が対称軸の両側で相等しくなるようにしきい値を設定する際に、輝度値の最大値及び最小値の差に対するしきい値の割合を用いて行う構成とされてなる付記5に記載の画像計測装置。
(付記7)
前記しきい値に所定の上限を設けてなる付記3乃至6のうちのいずれかに記載の画像計測装置。
(付記8)
前記対称軸を取得する手段は、予め基準となる画像を設け、同基準となる画像との間でパターンマッチングを行うことによって対称軸の位置を求める構成とされてなる付記4乃至7のうちのいずれかに記載の画像計測装置。
(付記9)
前記対称軸を取得する手段は、輝度値のプロファイルの極大値を求める動作を異なる計測位置で複数回行い、当該計測位置毎に前記輝度値のプロファイル上で極大値を有する位置の中点位置を求め、当該中点位置について前記複数回の計測の平均を求めることにより前記対称軸を求める構成とされてなる付記4乃至7のうちのいずれかに記載の画像計測装置。
(付記10)
計測対象物の撮像によって得られた画像データに、当該撮像に係る撮像条件データを添付する撮像条件添付段階と、
前記画像データに基づいて前記計測対象物の計測を行う計測段階とよりなり、
前記計測段階は、前記画像データに基づいて前記計測対象物上の所定の形状の輪郭に対応するエッジを抽出するエッジ抽出段階と、
エッジ抽出段階において適用するエッジ抽出方法を、前記撮像条件添付段階で当該画像データに添付された撮像条件データに基づいて決定するエッジ抽出方法決定段階とよりなる画像計測方法。
(付記11)
前記撮像条件データは、計測対象物の製造工程中の、当該撮像に係る段階を示すデータを含む構成とされてなる付記10に記載の方法。
(付記12)
前記エッジ抽出方法決定段階では複数のエッジ抽出方法から一の方法を選択するものとされ、同複数のエッジ抽出方法は、画像データの輝度値を微分して微分値を得、その微分値が最大となる位置をエッジとして抽出する第1の方法と、画像データの輝度値に対し所定のしきい値を設定し、画像データの輝度値が同しきい値を横切る位置をエッジとして抽出する第2の方法とを含む構成とされてなる付記10又は11に記載の方法。
(付記13)
更に画像データによって示される図形の対称軸を取得する段階を有し、
前記計測段階は、前記第2の方法において対称軸の両側で異なるしきい値を設定する段階とよりなる付記12に記載の方法。
(付記14)
前記対称軸の両側で異なるしきい値を設定する段階では、画像データの輝度値がピークを有する位置としきい値を有する位置との間の距離が対称軸の両側で相等しくなるようにしきい値を設定する構成とされてなる付記13に記載の方法。
(付記15)
前記画像データの輝度値のプロファイルがピークを有する位置としきい値を有する位置との間の距離が対称軸の両側で相等しくなるようにしきい値を設定する際に、輝度値の最大値及び最小値の差に対するしきい値の割合を用いて行う構成とされてなる付記14に記載の方法。
(付記16)
前記しきい値に所定の上限を設けてなる付記12乃至15のうちのいずれかに記載の方法。
(付記17)
前記対称軸を取得する段階では、予め基準となる画像を設け、同基準となる画像との間でパターンマッチングを行うことによって対称軸の位置を求める構成とされてなる付記13乃至16のうちのいずれかに記載の方法。
(付記18)
前記対称軸を取得する段階では、輝度値のプロファイルの極大値を求める動作を異なる計測位置で複数回行い、当該計測位置毎に前記輝度値のプロファイル上で極大値を有する位置の中点位置を求め、当該中点位置について前記複数回の計測の平均を求めることにより前記対称軸を求める構成とされてなる付記13乃至16のうちのいずれかに記載の方法。
(付記19)
計測対象物の撮像によって得られた画像データに、当該撮像に係る撮像条件データを添付してなる画像データに基づいて前記計測対象物の計測を行う計測段階をコンピュータに実行させるためのプログラムであって、
前記計測段階は、前記画像データに基づいて前記計測対象物上の所定の形状の輪郭に対応するエッジを抽出するエッジ抽出段階と、
エッジ抽出段階において適用するエッジ抽出方法を、前記撮像条件添付段階で当該画像データに添付された撮像条件データに基づいて決定するエッジ抽出方法決定段階とを含む構成とされてなるプログラム。
(付記20)
前記撮像条件データは、計測対象物の製造工程中の、当該撮像に係る段階を示すデータを含む構成とされてなる付記19に記載のプログラム。
【産業上の利用可能性】
【0106】
本発明の適用例としては、上述の如くの半導体装置、ハードディスク装置などの製造工程における走査型電子顕微鏡による画像に対する計測処理に対するもの限られない。例えば本発明は顕微鏡による画像を扱う全ての産業において適用可能である。又計測対象画像を得るための撮像装置としては上記走査型電子顕微鏡に限られず、光学顕微鏡、CCDカメラ、透過型電子顕微鏡等でもよく、本発明はこれらで撮像した画像に含まれる図形の計測にも適用可能である。
【図面の簡単な説明】
【0107】
【図1】本発明の実施例による画像計測装置の機能ブロック図である。
【図2】図1に示す前処理部の動作を説明するための動作フローチャートである。
【図3】図1に示すエッジ抽出理部の動作を説明するための動作フローチャートである。
【図4】図1に示す長さ計測部の動作を説明するための動作フローチャートである。
【図5】本発明の実施例による画像計測装置にて取り扱う画像データの一例を説明するための図である。
【図6】図5に示す画像に対する処理結果の一例について説明するための図である。
【図7】図3及び図4に示す左右非対称補正の具体的方法を説明するための動作フローチャートである。
【図8】図7に示す左右非対称補正の具体的方法の一例を説明するための図である。
【図9】本発明の実施例による画像計測装置による効果について説明するための図である。
【図10】図3のエッジEl(y),Er(y)抽出及び図4のエッジ再抽出時に行う対称軸の判定方法について説明するための図である。
【図11】本発明の実施例による画像計測装置について説明するためのブロック図である。
【図12】本発明の実施例による画像計測装置をコンピュータで実現する場合の当該コンピュータの構成を説明するためのブロック図である。
【図13】ハフ変換について説明するための図である。
【図14】エッジ検出方法について説明するための図である。
【符号の説明】
【0108】
1 前処理部
2 エッジ抽出部
3 長さ計測部
50 画像計測装置
100 CD−SEM
【特許請求の範囲】
【請求項1】
計測対象物の撮像によって得られた画像データに、当該撮像に係る撮像条件データを添付されてなる画像データに基づいて前記計測対象物の計測を行う画像計測装置であって、
前記画像データに基づいて前記計測対象物上の所定の形状の輪郭に対応するエッジを抽出するエッジ抽出手段と、
エッジ抽出手段において適用されるエッジ抽出方法を前記画像データに添付された撮像条件データに基づいて決定するエッジ抽出方法決定手段とよりなる画像計測装置。
【請求項2】
前記撮像条件データは、計測対象物の製造工程中の、当該撮像に係る段階を示すデータを含む構成とされてなる請求項1に記載の画像計測装置。
【請求項3】
前記エッジ抽出方法決定手段は、複数のエッジ抽出方法から一の方法を選択するものとされ、同複数のエッジ抽出方法は、画像データの輝度値を微分して微分値を得、その微分値が最大となる位置をエッジとして抽出する第1の方法と、画像データの輝度値に対し所定のしきい値を設定し、画像データの輝度値が同しきい値を横切る位置をエッジとして抽出する第2の方法とを含む構成とされてなる請求項1又は2に記載の画像計測装置。
【請求項4】
更に画像データによって示される図形の対称軸を取得する手段を有し、
前記第2の方法において対称軸の両側で異なるしきい値を設定する手段とを有する請求項3に記載の画像計測装置。
【請求項5】
計測対象物の撮像によって得られた画像データに、当該撮像に係る撮像条件データを添付する撮像条件添付段階と、
前記画像データに基づいて前記計測対象物の計測を行う計測段階とよりなり、
前記計測段階は、前記画像データに基づいて前記計測対象物上の所定の形状の輪郭に対応するエッジを抽出するエッジ抽出段階と、
エッジ抽出段階において適用するエッジ抽出方法を、前記撮像条件添付段階で当該画像データに添付された撮像条件データに基づいて決定するエッジ抽出方法決定段階とよりなる画像計測方法。
【請求項6】
前記撮像条件データは、計測対象物の製造工程中の、当該撮像に係る段階を示すデータを含む構成とされてなる請求項5に記載の方法。
【請求項7】
計測対象物の撮像によって得られた画像データに、当該撮像に係る撮像条件データを添付してなる画像データに基づいて前記計測対象物の計測を行う計測段階をコンピュータに実行させるためのプログラムであって、
前記計測段階は、前記画像データに基づいて前記計測対象物上の所定の形状の輪郭に対応するエッジを抽出するエッジ抽出段階と、
エッジ抽出段階において適用するエッジ抽出方法を、前記撮像条件添付段階で当該画像データに添付された撮像条件データに基づいて決定するエッジ抽出方法決定段階とを含む構成とされてなるプログラム。
【請求項1】
計測対象物の撮像によって得られた画像データに、当該撮像に係る撮像条件データを添付されてなる画像データに基づいて前記計測対象物の計測を行う画像計測装置であって、
前記画像データに基づいて前記計測対象物上の所定の形状の輪郭に対応するエッジを抽出するエッジ抽出手段と、
エッジ抽出手段において適用されるエッジ抽出方法を前記画像データに添付された撮像条件データに基づいて決定するエッジ抽出方法決定手段とよりなる画像計測装置。
【請求項2】
前記撮像条件データは、計測対象物の製造工程中の、当該撮像に係る段階を示すデータを含む構成とされてなる請求項1に記載の画像計測装置。
【請求項3】
前記エッジ抽出方法決定手段は、複数のエッジ抽出方法から一の方法を選択するものとされ、同複数のエッジ抽出方法は、画像データの輝度値を微分して微分値を得、その微分値が最大となる位置をエッジとして抽出する第1の方法と、画像データの輝度値に対し所定のしきい値を設定し、画像データの輝度値が同しきい値を横切る位置をエッジとして抽出する第2の方法とを含む構成とされてなる請求項1又は2に記載の画像計測装置。
【請求項4】
更に画像データによって示される図形の対称軸を取得する手段を有し、
前記第2の方法において対称軸の両側で異なるしきい値を設定する手段とを有する請求項3に記載の画像計測装置。
【請求項5】
計測対象物の撮像によって得られた画像データに、当該撮像に係る撮像条件データを添付する撮像条件添付段階と、
前記画像データに基づいて前記計測対象物の計測を行う計測段階とよりなり、
前記計測段階は、前記画像データに基づいて前記計測対象物上の所定の形状の輪郭に対応するエッジを抽出するエッジ抽出段階と、
エッジ抽出段階において適用するエッジ抽出方法を、前記撮像条件添付段階で当該画像データに添付された撮像条件データに基づいて決定するエッジ抽出方法決定段階とよりなる画像計測方法。
【請求項6】
前記撮像条件データは、計測対象物の製造工程中の、当該撮像に係る段階を示すデータを含む構成とされてなる請求項5に記載の方法。
【請求項7】
計測対象物の撮像によって得られた画像データに、当該撮像に係る撮像条件データを添付してなる画像データに基づいて前記計測対象物の計測を行う計測段階をコンピュータに実行させるためのプログラムであって、
前記計測段階は、前記画像データに基づいて前記計測対象物上の所定の形状の輪郭に対応するエッジを抽出するエッジ抽出段階と、
エッジ抽出段階において適用するエッジ抽出方法を、前記撮像条件添付段階で当該画像データに添付された撮像条件データに基づいて決定するエッジ抽出方法決定段階とを含む構成とされてなるプログラム。
【図1】


【図2】
【図3】
【図4】
【図7】
【図8】
【図11】
【図12】
【図13】
【図14】
【図5】
【図6】
【図9】
【図10】
【図2】
【図3】
【図4】
【図7】
【図8】
【図11】
【図12】
【図13】
【図14】
【図5】
【図6】
【図9】
【図10】
【公開番号】特開2008−116207(P2008−116207A)
【公開日】平成20年5月22日(2008.5.22)
【国際特許分類】
【出願番号】特願2006−296854(P2006−296854)
【出願日】平成18年10月31日(2006.10.31)
【出願人】(000005223)富士通株式会社 (25,993)
【Fターム(参考)】
【公開日】平成20年5月22日(2008.5.22)
【国際特許分類】
【出願日】平成18年10月31日(2006.10.31)
【出願人】(000005223)富士通株式会社 (25,993)
【Fターム(参考)】
[ Back to top ]