
画像記録装置、画像記録方法
【課題】主走査方向に移動する記録ヘッドから記録媒体へ液体を噴射してライン画像を形成する主走査を複数回行って、副走査方向に隣接するライン画像を互いに異なる主走査により形成する画像記録技術において、ライン画像間における隙間の発生を抑制する。
【解決手段】記録媒体の表面を改質する表面改質処理を実行する表面改質機と、記録媒体に形成されたマークの副走査方向への変位を検出する検出部と、画像記録処理の途中において、以後に形成予定の後続ライン画像の形成に先立って表面改質処理を実行するか否かを、検出部が検出したマークの変位に基づいて判断する表面改質制御部とを備え、表面改質制御部が表面改質処理を実行すると判断した場合は、表面改質機は、後続ライン画像の形成に先立って表面改質処理を実行し、画像記録制御部は、表面改質処理が実行された記録媒体に対して後続ライン画像を形成する。
【解決手段】記録媒体の表面を改質する表面改質処理を実行する表面改質機と、記録媒体に形成されたマークの副走査方向への変位を検出する検出部と、画像記録処理の途中において、以後に形成予定の後続ライン画像の形成に先立って表面改質処理を実行するか否かを、検出部が検出したマークの変位に基づいて判断する表面改質制御部とを備え、表面改質制御部が表面改質処理を実行すると判断した場合は、表面改質機は、後続ライン画像の形成に先立って表面改質処理を実行し、画像記録制御部は、表面改質処理が実行された記録媒体に対して後続ライン画像を形成する。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、記録媒体に液体を噴射して画像を記録する技術に関し、特に、主走査方向に移動する記録ヘッドから記録媒体へ液体を噴射してライン画像を形成する主走査を複数回行うことで、記録媒体に画像を記録する画像記録技術に関する。
【背景技術】
【0002】
特許文献1には、プラテン上に支持された記録媒体に対して、記録ヘッドが備えるノズルから液体であるインクを噴射して、記録媒体に画像を印刷する画像記録装置が記載されている。この画像記録装置の記録ヘッドは、記録媒体の幅方向(副走査方向)に並ぶ複数のノズルを備えるとともに、副走査方向に直交する主走査方向へ移動自在に構成されている。そして、記録ヘッドは、主走査方向に移動しながら各ノズルから記録媒体へ向けて液体を噴射する主走査を実行する。この主走査によって、記録媒体では、1つのノズルにより形成された主走査方向に延びる1ライン分の画像(ライン画像)が副走査方向に複数並ぶ。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2009−292129号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、上記のような画像記録装置では、複数回の主走査を実行することで、より高解像度な画像を得ることができる。具体的には、上記の主走査と、副走査方向へ記録ヘッドを移動させる副走査とを交互に実行して、複数回の主走査を実行すれば良い。つまり、主走査が1回完了すると、副走査が実行されて、記録ヘッドが副走査方向に移動する。また、この副走査に続いて、主走査が再び実行されて、記録ヘッドが主走査方向に移動する。これにより、先程の主走査により既に形成された複数のライン画像の間に、新たな主走査によるライン画像が形成される。この要領で主走査と副走査とを交互に実行して、複数の主走査を実行することで、先に形成されたライン画像の間に新たにライン画像を形成して、より高解像度な画像を印刷することができる。
【0005】
しかしながら、このようにして印刷を行った場合、水分や温度によって記録媒体が副走査方向に伸びてしまうことに起因して、次のような問題が発生するおそれがあった。つまり、上記のようにして複数の主走査を実行して、先に形成された複数のライン画像の間に新たなライン画像を形成する構成では、異なるタイミングで実行された主走査により形成されたライン画像が副走査方向に互いに隣接する。そのため、隣接するライン画像に注目したとき、一方のライン画像を形成した主走査から、他方のライン画像を形成する主走査までの期間に記録媒体が副走査方向に伸びて、これら一方と他方のライン画像の間に液体(インク)の抜けた隙間が発生してしまうおそれがあった。
【0006】
この発明は上記課題に鑑みてなされたものであり、主走査方向に移動する記録ヘッドから記録媒体へ液体を噴射してライン画像を形成する主走査を複数回行って、副走査方向に隣接するライン画像を互いに異なる主走査により形成する画像記録技術において、ライン画像間における隙間の発生を抑制する技術の提供を目的とする。
【課題を解決するための手段】
【0007】
この発明にかかる画像記録装置は、上記目的を達成するために、記録媒体を支持する支持部材と、主走査方向に移動しつつ支持部材に支持された記録媒体に液体を噴射して主走査方向に延びる1ライン分のライン画像を形成する主走査と、副走査方向に移動する副走査とを実行可能な記録ヘッドと、主走査と副走査とを記録ヘッドに交互に実行させることで、複数の主走査を実行して、副走査方向に隣接するライン画像を互いに異なる主走査により形成する画像記録処理を実行する画像記録制御部と、記録媒体の表面を改質する表面改質処理を実行する表面改質機と、記録媒体に形成されたマークの副走査方向への変位を検出する検出部と、画像記録処理の途中において、以後に形成予定の後続ライン画像の形成に先立って表面改質処理を実行するか否かを、検出部が検出したマークの変位に基づいて判断する表面改質制御部とを備え、表面改質制御部が表面改質処理を実行すると判断した場合は、表面改質機は、後続ライン画像の形成に先立って表面改質処理を実行し、画像記録制御部は、表面改質処理が実行された記録媒体に対して後続ライン画像を形成することを特徴としている。
【0008】
この発明にかかる画像記録方法は、上記目的を達成するために、主走査方向に移動しつつ支持部材に支持された記録媒体に液体を噴射して主走査方向に延びる1ライン分のライン画像を形成する主走査と、副走査方向に移動する副走査とを実行可能な記録ヘッドに、主走査と副走査とを交互に実行させることで、複数の主走査を実行して、副走査方向に隣接するライン画像を互いに異なる主走査により形成する画像記録処理を実行する画像記録方法において、記録媒体の表面を改質する表面改質処理を実行する表面改質工程と、記録媒体に形成されたマークの副走査方向への変位を検出する検出工程と、画像記録処理の途中において、以後に形成予定の後続ライン画像の形成に先立って表面改質処理を実行するか否かを、検出部が検出したマークの変位に基づいて判断する判断工程とを備え、判断工程で表面改質処理を実行すると判断した場合は、表面改質工程において後続ライン画像の形成に先立って表面改質処理が実行されるとともに、表面改質処理が実行された記録媒体に対して後続ライン画像が実行されることを特徴としている。
【0009】
このように構成された発明(画像記録装置および画像記録方法)では、主走査方向に記録ヘッドを移動させつつ記録ヘッドから液体を噴射して主走査方向に伸びる1ライン分のライン画像を形成する主走査と、副走査方向に記録ヘッドを移動させる副走査とが交互に実行される。このようにして複数の主走査が実行されて、副走査方向に隣接するライン画像が互いに異なる主走査により形成される(画像記録処理)。そのため、異なるタイミングで実行された主走査により形成されたライン画像が、副走査方向に隣接して並ぶこととなる。そして、このような構成では、記録媒体が副走査方向へ伸びた場合に、上述のような隙間が発生するおそれがあった。
【0010】
これに対して、この発明は、記録媒体の副走査方向への伸びを検出するために、記録媒体に形成されたマークの変位を検出するといった構成を備えており、このマークの変位の検出結果に基づいて記録媒体への表面改質処理を適宜実行する。具体的には、画像記録処理の途中において、マークの変位の検出結果から、以後に形成予定のライン画像(後続ライン画像)の形成に先立って記録媒体への表面改質処理を実行するか否かが判断される。これにより、記録媒体が副走査方向へ伸びた場合には、必要に応じて表面改質処理を実行することが可能となる。その結果、ライン画像の幅を増大させて、上述の隙間の発生を抑制することが可能となる。
【0011】
なお、上述の隙間は、記録媒体の全体に渡って一様に発生するとは限らず、部分的に発生する場合もある。したがって、表面改質機は、記録媒体の副走査方向に異なる複数の領域毎に表面改質処理を実行可能であり、表面改質制御部は、記録媒体の領域毎に表面改質処理を実行するか否かを判断するとともに、表面改質処理を実行すると判断した領域に対して表面改質機に表面改質処理を実行させるように画像記録装置を構成しても良い。これによって、表面改質処理を効率的に実行することができる。
【0012】
特に、画像記録制御部が、画像記録処理で実行する副走査としては、副走査方向の一方側へ記録ヘッドが移動する副走査のみを実行する画像記録装置においては、上述の隙間は、副走査方向において記録媒体の中心より一方側と反対の他方側で顕著になる(この理由は後述する)。そこで、表面改質機は、副走査方向において記録媒体の中心より当該一方側と反対側の半分に対してのみ表面改質処理を実行するように画像記録装置を構成しても良い。
【0013】
また、表面改質制御部は、表面改質機が表面改質処理のために記録媒体に与えるエネルギーを、検出部が検出したマークの変位に基づいて調整するとともに、表面改質機は、表面改質制御部により調整されたエネルギーを記録媒体に与えて表面改質処理を実行するように画像記録装置を構成しても良い。このように、マークの変位の検出結果に基づいて、表面改質処理のエネルギーを調整することで、ライン画像の幅を調整することが可能となり、上述の隙間の発生をより効果的に抑制することができる。
【0014】
この際、調整部は、表面改質処理で記録媒体に与えるエネルギーを副走査方向に沿って連続的に調整可能であるように構成しても良い。このような構成では、記録媒体に形成したマークの副走査方向の変位に基づいて、表面改質処理でのエネルギーを副走査方向に沿って連続的に調整することができ、ライン画像の副走査方向への幅を高精度に制御することができる。その結果、ライン画像間における隙間の発生を抑制することが可能となる。
【0015】
また、主走査方向および副走査方向に移動自在であるとともに記録ヘッドを搭載するキャリッジをさらに備え、記録ヘッドはキャリッジと一体的に移動することで、主走査における主走査方向への移動および副走査における副走査方向への移動を実行するように画像記録装置を構成することができる。この場合、表面改質機はキャリッジに搭載されており、主走査の実行の際にキャリッジと一体的に前記主走査方向に移動することで、主走査方向における後続ライン画像が形成される範囲に渡って表面改質処理を実行するように構成しても良い。これにより、表面改質処理を、主走査と並行して効率的に実行することができる。
【0016】
また、記録媒体は紙系の媒体であっても良い。このような紙系の媒体は、記録ヘッドから噴射される液体等の水分によって伸びやすく、その結果、上述のような隙間が発生するおそれがある。そこで、本発明を適用することで、この隙間の発生を抑制することが好適となる。
【0017】
また、記録媒体はフィルム系の媒体であっても良い。このようなフィルム系の媒体は、温度によって伸びやすく、その結果、上述のような隙間が発生するおそれがある。そこで、本発明を適用することで、この隙間の発生を抑制することが好適となる。
【図面の簡単な説明】
【0018】
【図1】本発明を適用可能な印刷システムの一例を示す模式図。
【図2】記録ユニットの構成を部分的に示す平面図。
【図3】図1の印刷システムが備える電気的構成を模式的に示すブロック図。
【図4】第1実施形態における印刷動作を模式的に示す図。
【図5】第2実施形態でのコロナ処理機の構成とマークの形成位置との関係を示す図。
【図6】第2実施形態における印刷動作を模式的に示す図。
【図7】第4実施形態における印刷動作を模式的に示す図。
【図8】第5実施形態における印刷動作を模式的に示す図。
【図9】第6実施形態における印刷動作を模式的に示す図。
【発明を実施するための形態】
【0019】
第1実施形態
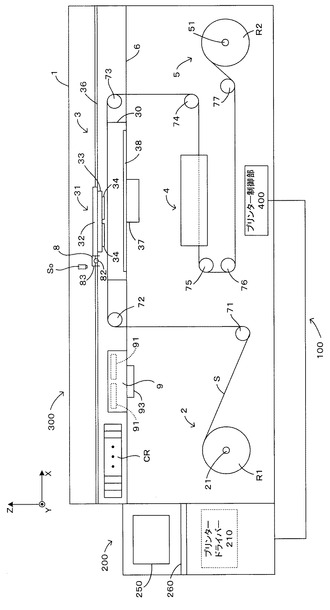
図1は、本発明を適用可能な印刷システムの一例を示す模式図である。なお、図1や以下の図面では必要に応じて、装置各部の配置関係を明確にするために、Z軸を鉛直軸とするXYZ直交座標が併記されている。以下の説明では、各座標軸(の矢印)が向く方向を正方向とし、その反対方向を負方向とし、Z軸の正側を上側とし、Z軸の負側を下側として適宜取り扱う。
【0020】
印刷システム100は、パーソナルコンピューター等の外部装置から受信した画像データに基づいて印刷データを生成するホスト装置200と、ホスト装置200から受信した印刷データに基づいて画像を印刷するプリンター300とを備える。このプリンター300は、ロール状に巻かれた長尺なシートSを繰り出しつつ、このシートSに対してインクジェット方式を用いて画像を印刷するものである。
【0021】
図1に示すように、プリンター300は、略直方体形状を有する本体ケース1を備える。本体ケース1内部には、シートSを巻いたロールR1からシートSを繰り出す繰出部2と、繰り出されたシートSにインクを噴射して印刷を行う印刷室3と、インクが付着したシートSを乾燥させる乾燥部4と、乾燥後のシートSをロールR2として巻き取る巻取部5とが配置されている。
【0022】
より詳しくは、本体ケース1内は、XY平面に平行に(すなわち水平に)配置された平板状の基台6によってZ軸方向へ上下に区画されており、基台6の上側が印刷室3となっている。印刷室3内の略中央部では、プラテン30が基台6の上面に固定されている。プラテン30は矩形状を有しており、XY平面に平行なその上面によって、シートSを下側から支持する。そして、記録ユニット31が、プラテン30上に支持されたシートSに対して印刷を行う。
【0023】
一方、基台6の下側には、繰出部2、乾燥部4および巻取部5が配置されている。繰出部2は、プラテン30に対してX軸負方向の下側(図1の左斜め下)に配置されており、回転自在な繰出軸21を備えている。そして、この繰出軸21にシートSが巻きつけられて、ロールR1が支持されている。一方、巻取部5は、プラテン30に対してX軸正方向の下側(図1の右斜め下)に配置されており、回転自在な巻取軸51を備えている。そして、この巻取軸51にシートSが巻き取られて、ロールR2が支持されている。また、乾燥部4は、X軸方向における繰出部2と巻取部5との間で、プラテン30の直下に配置されている。なお、乾燥部4は、繰出部2および巻取部5に対してはやや上側にある。
【0024】
そして、繰出部2から巻取部5へと搬送されるシートSが、7本のローラー71〜77により案内されながら、印刷室3と乾燥部4とを順番に通過する。つまり、繰出部2が備える繰出軸21のX軸正方向にはローラー71が配置されており、繰出軸21からX軸正方向に繰り出されたシートSは、ローラー71に巻き掛けられて上へと案内される。
【0025】
ローラー71の上側であって印刷室3の内部には、2本のローラー72、73がX軸正方向にこの順に並んでいる。そして、ローラー71から上へと案内されたシートSは、これら2本のローラー72、73へ巻き掛けられる。
【0026】
ローラー72、73は、プラテン30を挟むようにしてX軸方向にまっすぐ並んで(すなわち水平に)配置されており、それぞれの頂部がプラテン30の上面(シートSを支持する面)と同一の高さとなるように位置調整されている。したがって、ローラー72に巻き掛けられたシートSは、ローラー73に到るまでの間、プラテン30の上面に摺接しつつ水平(X軸方向)に移動する。そして、ローラー73に巻き掛けられたシートSは、下へと案内される。
【0027】
ローラー73の下側(基台6より下側)には、2本のローラー74、75がX軸負方向にこの順に並んでいる。ローラー74とローラー75とに巻き掛けられたシートSは、両ローラー74、75の間においてX軸方向に平行に(すなわち水平に)案内される。また、ローラー74、75の間には乾燥部4が配置されている。したがって、ローラー74に巻き掛けられたシートSは、X軸負方向に向きを変えるとともに、ローラー75に到るまでの間に乾燥部4の内部を通過する。
【0028】
ローラー75の下側では、2本のローラー76、77がX軸正方向にこの順に並んでいる。そして、ローラー76に巻き掛けられたシートSは、X軸正方向に向きを変えてローラー77に到る。また、ローラー77に巻き掛けられたシートSは、ローラー77のX軸正方向に配置された巻取部5の巻取軸51に巻き取られる。
【0029】
このように、繰出部2から繰り出されたシートSは、印刷室3や乾燥部4を通過して巻取部5に巻き取られる。そして、このシートSに対して、印刷室3での印刷処理や乾燥部4の乾燥処理が施される。
【0030】
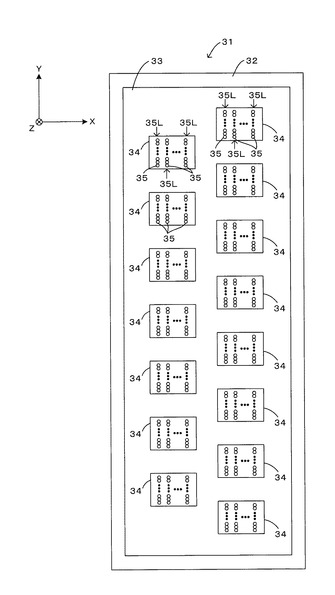
印刷室3での印刷処理は、プラテン30の上側に配置された記録ユニット31により実行される。この記録ユニット31は、印刷室3内のX軸負方向の端部(図1の左端部)に配置されたインクカートリッジCRから図示しないインク供給機構によって供給されたインクを、インクジェット方式によりシートSに噴射して印刷を行う。具体的には、この記録ユニット31は、キャリッジ32と、キャリッジ32の下面に取り付けられた平板状の支持板33と、支持板33の下面に取り付けられた複数の記録ヘッド34とを備える。
【0031】
図2は、記録ユニットの構成を部分的に示す平面図である。図2に示すように、支持板33の下面では、15個の記録ヘッド34がY軸方向に等ピッチで2行千鳥で並んでいる。これらの記録ヘッド34は、ノズル35からインクを噴射するものであり、互いに同一の構成を備えている。そこで以下では、1つの記録ヘッド34で代表して、その構成の詳細について説明する。
【0032】
記録ヘッド34の下面では、複数(例えば180個)のノズル35がY軸方向に等ピッチで直線状に並んで1つのノズル列35Lが構成されるとともに、複数のノズル列35LがX軸方向に等ピッチで並んでいる。記録ヘッド34の下面で並ぶ複数のノズル列35Lは、互いに異なるインク色に対応しており、例えば8色のインクを用いた場合は、8列のノズル列35Lが記録ヘッド34の下面に並ぶ。そして、同じノズル列35Lに属するノズル35は互いに同じ色のインクを噴射する一方、異なるノズル列35Lに属するノズル35は互いに異なる色のインクを噴射する。なお、ノズル35は、インクの詰まった微細管に取り付けられたピエゾ素子に電圧を印加して変形させることで、インクを管外に噴射するピエゾ方式によるものである。
【0033】
図1に戻って説明を続ける。上述のように構成された記録ユニット31のキャリッジ32は、支持板33および記録ヘッド34と一体的に移動自在となっている。具体的には、印刷室3内には、X軸方向に延びる第1ガイドレール36が設けられており、キャリッジ32は、第1CRモーターMx(図3)の駆動力を受けると、第1ガイドレール36に沿ってX軸方向に移動する。さらに、印刷室3内には、Y軸方向に延びる第2ガイドレール(図示省略)が設けられており、キャリッジ32は、第2CRモーターMy(図3)の駆動力を受けると、第2ガイドレールに沿ってY軸方向に移動する。
【0034】
そして、プラテン30の上面で停止するシートSに対して、記録ユニット31のキャリッジ32をXY面内で二次元的に移動させて、印刷が実行される。具体的には、記録ユニット31は、キャリッジ32をX軸方向(主走査方向)に移動させつつ記録ヘッド34の各ノズル35からシートSにインクを噴射する動作(主走査)を実行する。この主走査では、1つのノズルが噴射するインクにより形成されたX軸方向に延びる1ライン分の画像(ライン画像)が、Y軸方向に間隔を空けつつ複数並んで、二次元の画像が印刷される。そして、この主走査と、キャリッジ32をY軸方向(副走査方向)に移動させる副走査とが交互に実行されて、複数回の主走査が実行される(ラテラルスキャン方式)。
【0035】
つまり、記録ユニット31は1回の主走査を完了すると、副走査を行なってキャリッジ32をY軸方向に移動させる。続いて、記録ユニット31は、この副走査によって移動した位置から、キャリッジ32をX軸方向(の先程の主走査とは反対向き)に移動させる。これによって、先程の主走査により既に形成された複数のライン画像それぞれの間に、新たな主走査によるライン画像が形成される。そして、これら主走査と副走査とが交互に実行される。つまり、このプリンター300では、キャリッジ32をX軸方向に移動させつつノズル35からインクを噴射して、複数のライン画像から成る中間生成画像を形成する動作(主走査)を、Y軸方向への位置を変えながら(副走査)、複数回数実行することで、中間生成画像を重ね合わせた画像が形成される。
【0036】
このように、複数回の主走査を実行することで、1回の印刷が実行される。ここで、1回の主走査を「パス」と称することとし、複数回のパスにより実行される1回の印刷を「フレーム」と称することとする。また、1回のパスでシートSに形成される中間生成画像を「1パス画像」と称することとする。
【0037】
このような主走査と副走査を交互に繰り返して行う理由は、解像度を向上させるためである。つまり、M回のパスを実行して、M個の1パス画像を重ね合わせることで、1パス画像のM倍の解像度を有する1フレーム分の画像を得ることが可能となる。そこで、記録ユニット31は、印刷すべき画像の解像度に応じた回数のパスを実行して1フレームの印刷を実行する。
【0038】
ちなみに、キャリッジ32は、X軸方向に往復移動可能である。そこで、記録ユニット31は、キャリッジ32の往路および復路のそれぞれでパスを実行することで、複数のパスを効率的に実行している。
【0039】
上述のような1フレームの印刷は、シートSをX軸方向に間欠的に移動させながら繰り返し実行される。具体的には、プラテン30の上面のほぼ全域にわたる所定範囲が印刷領域となっている。そして、この印刷領域のX軸方向への長さに対応する距離(間欠搬送距離)を単位として、シートSをX軸方向へ間欠的に搬送するとともに、間欠搬送中にプラテン30の上面に停止するシートSに対して1フレームの印刷が行われる。具体的に言えば、プラテン30に停止するシートSに1フレームの印刷が終わると、シートSが間欠搬送距離だけX軸方向に搬送されて、シートSの未印刷の面がプラテン30に停止する。続いて、この未印刷面に新たに1フレームの印刷が実行され、これが完了すると、再びシートSが間欠搬送距離だけX軸方向に搬送される。そして、これら一連の動作が繰り返し実行される。
【0040】
なお、間欠搬送中にプラテン30の上面に停止しているシートSを平坦に保つために、プラテン30は、その上面に停止しているシートSを吸引する機構を備える。具体的には、プラテン30の上面には、図示しない多数の吸引孔が開口するとともに、プラテン30の下面には、吸引部37が取り付けられている。そして、吸引部37が動作することで、プラテン30の上面の吸引孔に負圧が発生して、シートSがプラテン30の上面に吸引される。そして、吸引部37は、印刷のためにシートSがプラテン30上に停止している間は、シートSを吸引することで、シートSを平坦に保つ一方、印刷が終了すると、シートSの吸引を止めて、シートSのスムーズな搬送を可能とする。
【0041】
さらに、プラテン30の下面には、ヒーター38が取り付けられている。このヒーター38は、プラテン30を所定温度(例えば45度)に加熱するものである。これにより、シートSは、記録ヘッド34から印刷処理を受けるのと並行して、プラテン30の熱によって1次乾燥されることとなる。そして、この1次乾燥により、シートSに着弾したインクの乾燥が促進される。
【0042】
こうして、プラテン30の上面において、1フレームの印刷を受けるとともに1次乾燥されたシートSは、シートSの間欠搬送に伴って移動して乾燥部4へ到達する。この乾燥部4は、乾燥用に加熱した空気により、シートSに着弾したインクを完全に乾燥させる乾燥処理を実行する。そして、この乾燥処理を受けたシートSは、シートSの間欠搬送に伴って巻取部5に到達して、ロールR2として巻き取られる。
【0043】
以上のようにして、記録ユニット31および乾燥部4によって、シートSに対して印刷・乾燥処理が施される。また、プリンター300は、上述した記録ユニット31や乾燥部4ほかに、コロナ処理機8やメンテナンスユニット9といった機能部を備える。続いて、これらの構成および動作の詳細について説明する。
【0044】
コロナ処理機8は、キャリッジ32のX軸負方向の端に取り付けられている。このコロナ処理機8は、コロナ放電電極82と、コロナ放電電極82を覆う電極カバー83とを備える。電極カバー83は、アースまたは所定の電位に接地されている。コロナ放電電極82は、放電バイアス発生部84(図3)から放電バイアスの印加を受けて、電極カバー83との間にコロナ放電を起こす。そうすると、このコロナ放電により大気中のガスがイオン化したイオンは、コロナ放電電極82と接地されたプラテン30との間の電界に従い輸送され、シートSの表面に付着する。これによって、シートSのコロナ放電電極82に対向する部分に表面改質が施される。なお、Y軸方向において、コロナ放電電極82はシートSよりも長く、シートSの両端はコロナ放電電極82の内側に位置する。したがって、コロナ放電によって、Y軸方向におけるシートSの全域に渡って、表面改質を行うことができる。
【0045】
そして、後に詳述するように、コロナ処理機8がキャリッジ32と一体的にX軸方向へ移動しつつコロナ放電を実行することで、シートSのX軸方向への所定幅に対して表面改質が実行される。こうして、コロナ放電によってシートSにエネルギーが与えられることで、シートSの表面が改質されて(表面改質処理)、シートSのインクに対する濡れ性が向上する。この濡れ性は、インクの種類、インクの極性、シートの材質等に応じて最適な組合せがあるが、この最適な組合せに応じて調整すれば良い。具体的には、コロナ放電電極82への放電バイアス、電極カバー83への電位またはプラテン30の電位を調整すれば良い。このように印刷処理に先立ってシートSに表面改質を施しておくことで、印刷処理におけるシートSへのインクの定着性を高めることができる。
【0046】
メンテナンスユニット9は、プラテン30からX軸負方向に外れた位置に設けられており、非印刷時にホームポジション(メンテナンスユニットの直上位置)に退避する記録ヘッド34に対してメンテナンスを行う。このメンテナンスユニット9は、15個の記録ヘッド34に対して一対一の対応関係で設けられた15個のキャップ91と、キャップ91を昇降する昇降部93とを有する。
【0047】
このメンテナンスユニット9で実行されるメンテナンスとしては、キャッピング、クリーニングおよびワイピングがある。キャッピングは、昇降部93によりキャップ91を上昇させて、ホームポジションにある記録ヘッド34をキャップ91で覆う処理である。このキャッピングにより、記録ヘッド34が有するノズル35内でインクの粘性が増大するのを抑制することができる。また、クリーニングは、記録ヘッド34をキャッピングした状態で、キャップ91内に負圧を発生させることにより、ノズル35から強制的にインクを排出する処理である。このクリーニングにより、粘性が増大したインクやインク中の気泡等をノズル35から除去することができる。ワイピングは、記録ヘッド34においてノズル35の開口が並ぶ面(ノズル開口形成面)を、図示しないワイパーにより拭く処理である。このワイピングにより、記録ヘッド34のノズル開口形成面からインクを拭き取ることができる。
【0048】
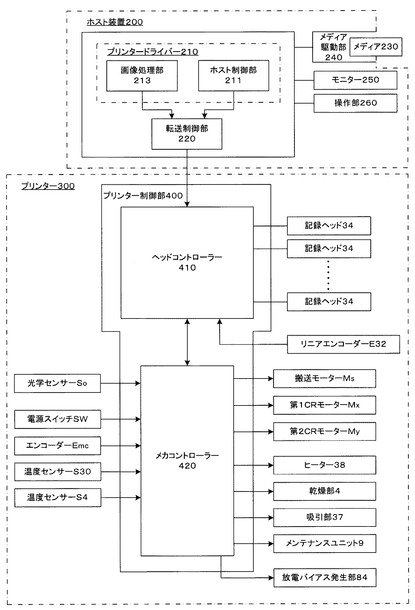
以上が、印刷システム100が備える装置構成の概要である。続いて、上述した図1に図3を加えて、図1の印刷システムが備える電気的構成について詳述する。ここで、図3は、図1の印刷システムが備える電気的構成を模式的に示すブロック図である。
【0049】
上述したとおり、印刷システム100は、プリンター300のほか、これを制御するホスト装置200を備える。このホスト装置200は、例えばパーソナルコンピューターにより構成されており、プリンター300の動作を制御するプリンタードライバー210を内蔵するほか、プリンター300との通信機能を司る転送制御部220を備える。なお、プリンタードライバー210は、ホスト装置200の備えるCPU(Central Processing Unit)がプリンタードライバー210用のプログラムを実行することで構築される。
【0050】
また、ホスト装置200は、プリンタードライバー用のプログラムが記憶されたメディア230にアクセスして、当該プログラムを読み出すメディア駆動部240を備える。このメディア230としては、CD(Compact Disc)、DVD(Digital Versatile Disc)、USB(Universal Serial Bus)メモリー等の種々のメディアを用いることができる。
【0051】
さらに、ホスト装置200は、作業者とのインターフェースとして、液晶ディスプレイ等で構成されるモニター250と、キーボードやマウス等で構成される操作部260とを備える。なお、タッチパネル式のディスプレイをモニター250として用いて、このモニター250のタッチパネルで操作部260を構成しても良い。モニター250には、印刷対象の画像のほかにメニュー画面が表示されている。したがって、作業者は、モニター250を確認しつつ操作部260を操作することで、メニュー画面から印刷設定画面を開いて、印刷媒体の種類、印刷媒体のサイズ、印刷品質、版数等の各種の印刷条件を設定することができる。
【0052】
印刷媒体(すなわちシートS)の種類は、紙系とフィルム系に大別される。具体例を挙げると、紙系には上質紙、キャスト紙、アート紙、コート紙等があり、フィルム系には合成紙、PET(Polyethylene terephthalate)、PP(polypropylene)等がある。印刷媒体のサイズとしては、シートSの幅(Y軸方向の幅)が設定される。印刷品質は、印刷する解像度に応じて用意された複数の印刷モードから1つの印刷モードを選択することで、設定することができる。例を挙げれば次のとおりである。つまり、上記プリンター300では、1フレームで実行されるパスの数を変えることで解像度を変化できる。そこで、1フレームで実行されるパスの数が異なる複数の印刷モードを用意しておき、印刷する解像度に応じたパス数の印刷モードを選択できるように構成すれば良い。これにより、選択した印刷モードのパス数に応じた解像度で印刷を実行することができる。なお、印刷モードに代えて解像度を直接入力することで、印刷品質を設定するように構成しても良い。版数は、印刷媒体の同一エリアに複数の版(画像)を重ねて印刷する際に設定されるものであり、具体的には、重ねて印刷する版の数が設定される。ちなみに、複数の版が設定されている場合は、モニター250に版毎の画像を表示することができる。
【0053】
そして、プリンタードライバー210は、上述のような、モニター250の表示や、操作部260からの入力の処理を制御するホスト制御部211を備える。つまり、ホスト制御部211は、メニュー画面や印刷設定画面等の各種画面をモニター250表示させるともに、各種画面において操作部260から入力された内容に応じた処理を行う。これにより、ホスト制御部211は、作業者からの入力に応じてプリンター300を制御するために必要な制御信号を生成する。
【0054】
また、プリンタードライバー210は、外部装置から受信した画像データに対して画像処理を施して、印刷データを生成する画像処理部213を備える。具体的には、解像度変換処理、色変換処理、ハーフトーン処理等といった画像処理が実行される。
【0055】
そして、ホスト制御部211で生成された制御信号や、画像処理部213で生成された印刷データは転送制御部220を介して、プリンター300の本体ケース1内に設けられたプリンター制御部400に転送される。この転送制御部220は、プリンター制御部400との間で双方向のシリアル通信が可能となっており、プリンター制御部400に制御信号や印刷データを転送するとともに、その応答信号をプリンター制御部400から受信してホスト制御部211に送信する。
【0056】
プリンター制御部400は、ヘッドコントローラー410とメカコントローラー420とを備える。ヘッドコントローラー410は、プリンタードライバー210から送信されてきた印刷データに基づいて、記録ヘッド34を制御する機能を司る。具体的には、ヘッドコントローラー410は、記録ヘッド34のノズル35からのインク噴射を、印刷データに基づいて制御する。この際、ノズル35からインクを噴射するタイミングは、キャリッジ32のX軸方向への移動に基づいて制御される。つまり、印刷室3内には、キャリッジ32のX軸方向の位置を検出するリニアエンコーダーE32が設けられている。そして、ヘッドコントローラー410は、リニアエンコーダーE32の出力を参照することで、キャリッジ32のX軸方向への移動に応じたタイミングで、ノズル35からインクを噴射させる。
【0057】
一方、メカコントローラー420は、シートSの間欠搬送やキャリッジ32の駆動を制御する機能を主として司る。具体的には、メカコントローラー420は、繰出部2、ローラー71〜77および巻取部5で構成されるシート搬送系を駆動する搬送モーターMsを、搬送モーターMsの回転を検出するエンコーダーEmcの出力に基づいて制御して、シートSの間欠搬送を実行する。また、メカコントローラー420は、第1CRモーターMxを制御することで、主走査のためのX軸方向への移動をキャリッジ32に実行させるとともに、第2CRモーターMxを制御することで、副走査のためのY軸方向への移動をキャリッジ32に実行させる。
【0058】
そして、ヘッドコントローラー410とメカコントローラー420とが同期を取りつつ、これらの制御を適宜実行することで、間欠搬送されるシートSに対して、解像度に応じた回数のパスが実行されて、1フレーム分の印刷が実行される。これにより、所望の解像度を有する1フレーム分の画像がシートSに印刷される。
【0059】
また、メカコントローラー420は、印刷処理のための上記制御のほかに種々の制御を実行できる。具体的には、メカコントローラー420は、電源スイッチSWのオン/オフを検出して、電源スイッチSWがオンした場合には、プリンター300の各部の起動処理を実行する。また、メカコントローラー420は、プラテン30上面の温度を検出する温度センサーS30の出力に基づいて、ヒーター38をフィードバック制御したり、乾燥部4の内部の温度を検出する温度センサーS4の出力に基づいて、乾燥部4をフィードバック制御したりといった温度制御を実行する。さらに、メカコントローラー420は、吸引部37を制御してプラテン30の吸引孔に発生する負圧を調整したり、メンテナンスユニット9を制御して所定のメンテナンスを実行したり、放電バイアス発生部84を制御して放電バイアスの値を調整したりといった各動作を実行可能である。
【0060】
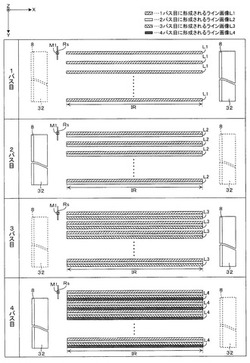
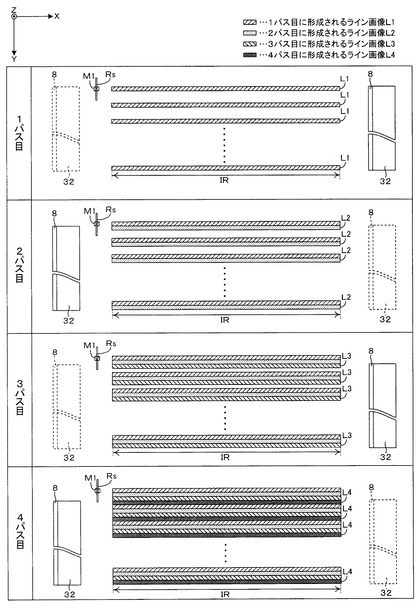
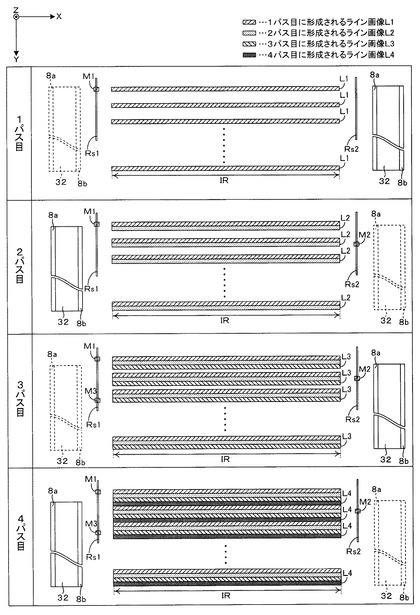
以上が、図1の印刷システムが備える電気的構成の概要である。続いて、第1実施形態で実行される印刷動作の詳細について、図4を用いて説明する。図4は、第1実施形態における印刷動作を模式的に示す図である。同図の例では、X軸方向に所定幅を有する有効印刷領域IRに、1フレーム分の画像を4パスで印刷する動作が示されている。なお、「1パス目」〜「4パス目」の各欄にて、破線で示したキャリッジ32はパスの開始地点にあるキャリッジ32を表しており、実線で示したキャリッジ32はパスの終了地点にあるキャリッジ32を表している。同図に示すように、有効印刷領域IRのX軸負方向の外側とX軸正方向外側の間で、キャリッジ32を(記録ヘッド34と一体的に)2往復させることで、4パスが実行されて、1フレーム分の画像が印刷される。
【0061】
同図の「1パス目」の欄に示すように、1パス目では、キャリッジ32がシートSの有効印刷領域IRの上側をX軸正方向へ通過するとともに、記録ヘッド34の各ノズル35から液体(インク)が噴射される。これによって、シートSでは、複数のライン画像L1がY軸方向に間隔を空けて並ぶ。こうして1パス目の主走査が完了すると、副走査が実行されて、キャリッジ32がY軸正方向へ移動距離Y32だけ移動する。
【0062】
この副走査が完了すると、同図の「2パス目」の欄に示すように、キャリッジ32がシートSの有効印刷領域IRの上側をX軸負方向へ通過するとともに、記録ヘッド34の各ノズル35から液体が噴射される。これによって、シートSでは、1パス目に形成された複数のライン画像L1それぞれの間に新たなライン画像L2が1本ずつ形成される。こうして2パス目の主走査が完了すると、副走査が実行されて、キャリッジ32がY軸正方向へ移動距離Y32だけ移動する。続いて、「1パス目」「2パス目」と同じ要領で「3パス目」「4パス目」が実行されて、有効印刷領域IRに1フレーム分の画像が印刷される。
【0063】
このように4パスを実行することで、1本のノズル35が4本のライン画像L1〜L4をY軸方向に隣接して形成する。そして、この動作を複数のノズル35のそれぞれが実行することで、ライン画像L1〜L4がY軸方向に繰り返し並んで形成される。こうして、1パス画像の4倍の解像度を有する1フレーム分の画像が印刷される。
【0064】
ところで、この実施形態では、上述のように、主走査と副走査とを記録ヘッド34に交互に実行させることで複数の主走査を実行して1フレーム分の画像を印刷する1フレーム印刷処理(画像記録処置)と並行して、表面改質処理がシートSに対して施される。以下では、この表面改質処理について詳述する。
【0065】
1フレームを構成する4パスのうち最初のパス(すなわち、1パス目)では、ライン画像L1の形成に先立って、マークM1がシートSに形成される。つまり、1パス目の実行のためにキャリッジ32がX軸正方向への移動を開始すると、記録ヘッド34のノズル35から液体が噴射されて、有効印刷領域IRのX軸負方向の外側にマークM1が形成される。そして、このマークM1の形成後に、有効印刷領域IRにライン画像L1が形成される。なお、このマークM1の形成は、キャリッジ32に備えられた複数のノズル35のうち、Y軸方向の最上流にあるノズル35により行われる。したがって、マークM1は、Y軸方向の上流端に形成されることとなる。
【0066】
こうして形成されたマークM1は光学センサーSoにより検出される。つまり、有効印刷領域IRのX軸負方向の外側は、プラテン30の上面に対向して光学センサーSoが配置されている。この光学センサーSoは、プラテン30に対する位置が固定された状態で本体ケース1により支持されたラインセンサーである。具体的には、光学センサーSoは、その検出領域Rsの長手方向がY軸方向と平行となるように位置決めされており、検出領域Rsにある検出対象物(ここでは、マークM1)を検出する。そして、光学センサーSoは、検出対象物のY軸方向への位置に関する情報を、メカコントローラー420に送信する。これにより、メカコントローラー420は、シートS上に形成されたマークM1のY軸方向への変位をモニターすることができる。
【0067】
そして、メカコントローラー420は、こうして検出したマークM1のY軸方向への変位に基づいて、コロナ処理機8による表面改質処理を実行するか否かを判断する。つまり、マークM1のY軸方向への変位は、シートSのY軸方向への伸びを反映している。そこで、メカコントローラー420は、マークM1のY軸方向への変位を参照することで、シートSのY軸方向への伸びに応じて、適宜表面改質処理を適宜実行するといった構成を備える。つまり、マークM1の変位からシートSのY軸方向への伸びが大きいと判断される場合は、表面改質処理を実行して、シートSに形成されるライン画像の幅(Y軸方向の幅)を増大させ、これによって、シートSの伸びに起因する隙間の発生が抑制される。
【0068】
具体的には、1パス目でマークM1が形成されると、メカコントローラー420は、マークM1の初期位置(形成時点でのマークM1の位置)を記憶する。続いて、1パス目におけるライン画像L1の形成が完了すると、メカコントローラー420は、マークM1のこの時点での位置と初期位置とを比較して、ライン画像L1の形成によって生じたマークM1の変位量を求める。そして、メカコントローラー420は、この変位量に応じて、以後に形成予定のライン画像L2〜L4(後続ライン画像)の形成に先立って、コロナ処理機8による表面改質処理を実行するか否かを判断する。具体的には、マークM1の変位量が所定の閾値(例えば、10[μm])以上である場合は表面改質処理を実行すると判断する一方、マークM1の変位量が所定の閾値未満である場合は表面改質処理を実行しないと判断する。そして、表面改質処理を実行しないと判断された場合は、そのまま2パス目が実行されて、ライン画像L2が形成される。
【0069】
一方、表面改質処理を実行すると判断された場合は、ライン画像L2の形成に先立って、シートSの有効印刷領域IRの全域に渡って表面改質処理が実行される。具体的には、この表面改質処理は、先程の1パス目に続く2パス目の主走査と並行して実行される。つまり、2パス目の実行のためにキャリッジ32がX軸負方向への移動を開始して、コロナ処理機8のコロナ放電電極82が有効印刷領域IRに対向する位置に到達すると、放電バイアス発生部84が放電バイアスをコロナ放電電極82に印加して、表面改質処理が開始される。続いて、これより少し遅れて、記録ヘッド34が有効印刷領域IRに到達したタイミングから2パス目のライン画像L2の形成が開始される。これにより、ライン画像L2は、表面改質処理の施された有効印刷領域IRに対して形成される。こうして、キャリッジ32をX軸負方向へ移動させつつ、表面改質処理とライン画像L2の形成とを実行することで、表面改質処理の直後にライン画像L2を形成するといった動作が有効印刷領域IRの全域に渡って実行される。
【0070】
こうして2パス目が完了すると、続いて3パス目が実行される。そして、3パス目においてライン画像L3の形成が完了すると、メカコントローラー420はこの時点におけるマークM1の初期位置からの変位量を求める。続いて、上述と同様にして、メカコントローラー420は、この変位量に応じて、以後に形成予定のライン画像L4(後続ライン画像)の形成に先立って、コロナ処理機8による表面改質処理を実行するか否かを判断する。そして、表面改質処理を実行しないと判断された場合は、そのまま4パス目が実行されて、ライン画像L4が形成される。一方、表面改質処理を実行すると判断された場合は、上述の2パス目と同じ要領で4パス目が実行されて、ライン画像L4は、表面改質処理の施された有効印刷領域IRに対して形成されることとなる。こうして4パス目が実行されて、1フレーム分の印刷が完了する。
【0071】
以上のように構成された実施形態では、X軸方向(主走査方向)に記録ヘッド34を移動させつつ記録ヘッド34から液体を噴射してライン画像L1〜L4を形成する主走査と、Y軸方向(副走査方向)に記録ヘッド34を移動させる副走査とが交互に実行される。このようにして複数の主走査が実行されて、Y軸方向に隣接するライン画像L1〜L4が互いに異なる主走査(パス)により形成される。そのため、異なるタイミングで実行された主走査(パス)により形成されたライン画像L1〜L4が、Y軸方向に隣接して並ぶこととなる。ただし、このような構成では、シートSがY軸方向へ伸びた場合に、上述のような隙間が発生するおそれがあった。
【0072】
このような問題に対して、この実施形態は、シートSのY軸方向への伸びを検出するために、シートSに形成されたマークM1の変位を検出するといった構成を備えており、このマークM1の変位の検出結果に基づいてシートSへの表面改質処理を適宜実行する。具体的には、1フレーム分の画像を印刷する1フレーム印刷処理(画像記録処置)の途中において、マークM1の変位の検出結果から、以後に形成予定のライン画像L2〜L4(後続ライン画像)の形成に先立ってシートSへの表面改質処理を実行するか否かが判断される。これにより、シートSがY軸方向へ伸びた場合には、必要に応じて表面改質処理を実行することが可能となる。その結果、ライン画像L2〜L4の幅を増大させて、上述の隙間の発生を抑制することが可能となる。
【0073】
また、上記実施形態では、コロナ処理機8はキャリッジ32に搭載されており、主走査の実行の際にキャリッジ32と一体的にX軸方向に移動することで、X軸方向における有効印刷領域IR(つまり、後続ライン画像が形成される範囲)の全域に渡って表面改質処理を実行する。これにより、表面改質処理を、主走査と並行して効率的に実行することが可能となっている。
【0074】
また、この実施形態では、マークM1は、記録ヘッド34がシートSに液体を噴射することで、シートSに形成されている。このような構成では、マークM1を形成するタイミングや位置を適宜調整できるといった利点がある。
【0075】
また、この実施形態では、マークM1は、主走査の実行中にX軸方向に移動する記録ヘッド34がシートSに液体を噴射することで、シートSに形成されている。このような構成は、主走査の実行中にマークM1を形成することができるため、マークM1を形成するための動作を別途実行する必要がなく、印刷速度の向上を図るにあたって有利となる。
【0076】
ところで、上述のようにシートSに液体を噴射してライン画像L1〜L4を形成する構成では、ライン画像L1〜L4を形成する度にシートSに付着する液量が増して、シートSがY軸方向へ伸びていく傾向にある。この場合、ライン画像L1〜L4の形成により発生するシートSのこのような伸びを、マークM1の変位に反映させることが好適となる。
【0077】
そこで、この実施形態は、マークM1の形成が行われる1パス目の主走査において、当該マークM1を形成してからライン画像L1を形成している。したがって、ライン画像L1の形成の際に発生するシートSの伸びを、マークM1の変位に反映させることができる。その結果、上述の隙間の発生を、より確実に抑制することが可能となる。
【0078】
また、この実施形態では、複数の主走査(4パス)のうち、最初に実行される主走査(1パス目)の実行中にマークM1が形成される。このように構成することで、各主走査で画像ラインL1〜L4が形成される際に発生するシートSの伸びを、マークM1の変位に反映させることができる。その結果、上述の隙間の発生を、より確実に抑制することが可能となる。
【0079】
また、この実施形態は、光学センサーSoは、検出領域Rsの長手方向がY軸方向に平行に配置されたラインセンサーを有し、このラインセンサーがマークを検出した結果に基づいて、マークM1のY軸方向への変位を検出している。このようなラインセンサーを用いることで、マークM1のY軸方向への変位を確実に捉えることができる。
【0080】
また、上述のように、シートSとしては紙系の媒体およびフィルム系の媒体の両方が使用可能である。なお、紙系の媒体は、記録ヘッド34から噴射される液体等の水分によって伸びやすく、その結果、上述のような隙間が発生するおそれがある。そこで、この実施形態のように構成することで、隙間の発生を抑制することが好適となる。また、フィルム系の媒体は、温度によって伸びやすい。特に、プラテン30でシートSを加熱する構成では、温度による伸びが顕著となるおそれがある。そこで、この実施形態のように構成することで、隙間の発生を抑制することが好適となる。
【0081】
第2実施形態
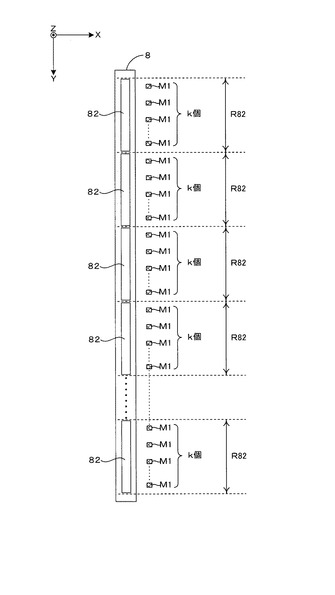
ところで、シートSの伸び方は、Y軸方向への位置によって異なる場合がある。そこで、これから説明する第2実施形態では、複数のマークM1がY軸方向において互いに異なる位置に形成されおり、これによって、Y軸方向の異なる位置におけるシートSの伸び方の違いが、マークM1の変位により検出可能となっている。さらに、このマークM1の変位を検出した結果に基づいて、Y軸方向の所定範囲毎に表面改質処理を実行できるように、コロナ処理機8が構成されている。具体的には、コロナ処理機8は複数のコロナ放電電極82をY軸方向に並べた構成を備えており、各コロナ放電電極82に対してマークM1がk個ずつ形成される(図5)。ここで、図5は、第2実施形態でのコロナ処理機の構成とマークの形成位置との関係を示す模式図である。
【0082】
続いて、このような構成を備える第2実施形態の詳細について説明する。なお、以下では、第1実施形態との差異を中心に説明する一方、共通部分については説明を適宜省略する。ただし、第1実施形態と共通する構成を備えることで、第2実施形態においても第1実施形態と同様の効果が奏されることは言うまでも無い。また、この点は、第2実施形態に続いて説明する第3〜第6実施形態についても同様である。
【0083】
図6は、第2実施形態における印刷動作を模式的に示す図である。図6の例においても、図4と同様に、有効印刷領域IRのX軸負方向の外側とX軸正方向の外側との間で、キャリッジ32を(記録ヘッド34と一体的に)2往復させることで、4パスが実行されて、1フレーム分の画像が印刷される。なお、図6においてキャリッジ32に関する表記(実線・破線)が示す意味は、図4のそれと同様である。
【0084】
第2実施形態においても、1フレームを構成する4パスのうち最初のパス(すなわち、1パス目)では、ライン画像L1の形成に先立って、マークM1がシートSに形成される。ただし、第1実施形態と異なり、キャリッジ32に備えられた複数のノズル35のそれぞれが、1つずつマークM1を形成する。これによって、複数のマークM1がY軸方向に並ぶ。
【0085】
一方、上述のとおり、コロナ処理機8は、複数のコロナ放電電極82をY軸方向に並べた構成を備えている。そして、複数のコロナ放電電極82は、それぞれが対向するシートSの領域R82に対する表面改質処理を担当する。したがって、複数のマークM1がY軸方向に並べて形成されることで、各コロナ放電電極82が表面改質処理を分担する領域R82毎にk個のマークM1がY軸方向に並んで形成される(つまり、各コロナ放電電極82に対してk個ずつマークM1が形成される)。ここで、kは正の整数とする。
【0086】
そして、第2実施形態では、Y軸方向に複数のマークM1が並ぶ全域に渡って、光学センサーSo(ラインセンサー)の検出領域Rsが設けられており、複数のマークM1それぞれの位置に関する情報が光学センサーSoからメカコントローラー420に送信される。そして、メカコントローラー420は、この各マークM1の位置情報に基づいて、以後に形成予定のライン画像L2〜L4(後続ライン画像)の形成に先立って、コロナ処理機8による表面改質処理を実行するか否かを判断する。
【0087】
つまり、1パス目で複数のマークM1が形成されると、メカコントローラー420は、各マークM1の初期位置(形成時点での各マークM1の位置)を記憶する。続いて、1パス目におけるライン画像L1の形成が完了すると、メカコントローラー420は、この時点における各マークM1の初期位置からの変位量を求める。さらに、メカコントローラー420は、領域R82毎に形成されたk個のマークM1の変位量の平均値を算出する。こうして、複数の領域R82それぞれについて、k個のマークM1の平均変位量が算出される。そして、メカコントローラー420は、k個のマークM1の平均変位量が所定の閾値以上である領域R82に対して表面改質処理を実行すると判断する一方、k個のマークM1の平均変位量が所定の閾値未満である領域R82に対しては表面改質処理を実行しないと判断する。
【0088】
続く2パス目では、ライン画像L2の形成に先立って、表面改質処理を実行すると判断された領域R82に対して表面改質処理が実行される。具体的には、2パス目の実行後まもなく、コロナ処理機8のコロナ放電電極82が有効印刷領域IRに差し掛かると、表面改質処理を実行すると判断された領域R82を分担するコロナ放電電極82に対してのみ選択的に放電バイアスが印加されて、当該領域R82への表面改質処理が開始される。続いて、これより少し遅れて、記録ヘッド34が有効印刷領域IRに到達したタイミングから2パス目のライン画像L2の形成が開始される。こうして、キャリッジ32をX軸負方向へ移動させつつ、表面改質処理とライン画像L2の形成とを実行することで、表面改質処理の直後にライン画像L2を形成するといった動作が実行される。
【0089】
この2パス目が完了すると、続いて3パス目が実行される。そして、3パス目においてライン画像L3の形成が完了すると、メカコントローラー420はこの時点におけるマークM1の初期位置からの変位量を求める。続いて、上述と同様にして、メカコントローラー420は、この変位量に応じて、以後に形成予定のライン画像L4(後続ライン画像)の形成に先立って、コロナ処理機8による表面改質処理を実行するか否かを領域R82毎に判断し、この判断結果に基づいて4パス目を実行する。そして、1フレーム分の印刷が完了する。
【0090】
以上のように第2実施形態においても、シートSのY軸方向への伸びを検出するために、シートSに形成されたマークM1の変位を検出するといった構成を備えており、このマークM1の変位の検出結果に基づいてシートSへの表面改質処理を適宜実行する。その結果、シートSがY軸方向に伸びた場合であっても、ライン画像L2〜L4の幅を増大させて、上述の隙間の発生を抑制することが可能となっている。
【0091】
また、第2実施形態は、上述の隙間が記録媒体の全体に渡って一様に発生するとは限らず、部分的に発生する場合もあることに対応して、次のような構成を備えている。つまり、コロナ処理機8は、シートSのY軸方向に異なる複数の領域R82毎に表面改質処理を実行可能である。そして、メカコントローラー420は、シートSの複数の領域R82毎に表面改質処理を実行するか否かを判断するとともに、表面改質処理を実行すると判断した領域R82に対してコロナ処理機8に表面改質処理を実行させている。これによって、表面改質処理を効率的に実行することが可能となっている。
【0092】
なお、第2実施形態で示した例では、キャリッジ32に備えられた複数のノズル35の全てがマークM1を形成している。ただし、これら複数のノズル35の一部のノズル35(例えば、Y軸方向に1つ置きや2つ置きのノズル35)のみがマークM1を形成して、複数のマークM1をY軸方向において異なる位置に形成しても良い。
【0093】
第3実施形態
ところで、上述したように、シートSの伸び方がY軸方向への位置によって異なることに起因して、上述した隙間の発生態様が、シートSのY軸方向の正側と負側で異なる場合がある。具体的に説明すると次のとおりである。
【0094】
つまり、シートSの膨張は、Y軸方向の中央部を中心として、Y軸方向の両端間が広がるようにして発生する。したがって、シートSのY軸方向の正側はより正側へ広がって移動するとともに、シートSのY軸方向の負側はより負側へ広がって移動する。このような伸びを見せるシートSに対して、記録ヘッド34は、Y軸方向の負側から正側に移動しつつ(副走査)、各移動先でインクの噴射を実行する(主走査)。したがって、副走査に伴う記録ヘッド34の移動方向は、シートSのY軸方向の負側半分ではシートSが広がる方向に対して逆になる一方、シートSのY軸方向の正側半分ではシートSが広がる方向に対して順になる。その結果、シートSの伸びる方向と逆に記録ヘッド34が移動するシートSのY軸方向の負側半分において、上述の隙間の発生が特に顕著となる場合があった。
【0095】
そこで、上記第1実施形態や第2実施形態に対して、シートSの中心よりY軸負方向の半分に対してのみ表面改質処理を実行するように変形しても良い。具体的には、図5に示したように、Y軸方向に並ぶ複数のコロナ放電電極82でコロナ処理機8を構成するとともに、シートSの中心よりY軸方向の負側半分に位置するコロナ放電電極82についてのみ、表面改質処理の実行の有無を判断し、その他のコロナ放電電極82を動作させなければ良い。これにより、シートSのY軸方向の負側半分において特に顕著となっていた隙間の発生を、効果的に抑制することができる。
【0096】
ちなみに、シートSのY軸方向の幅は一定とは限らず、種々の幅のシートSに対して印刷処理を実行可能である。これに対して、この実施形態のように、Y軸方向に並ぶ複数のコロナ放電電極82でコロナ処理機8を構成しておけば、表面改質処理を実行するコロナ処理機を、シートSの幅に応じて選択することができる。その結果、シートSの幅が変化した場合であっても、シートSの中心よりY軸方向の負側半分に対して表面改質処理を実行するといった上記動作を適切に実行することができる。
【0097】
第4実施形態
図7は、第4実施形態における印刷動作を模式的に示す図である。図7の例においても、有効印刷領域IRのX軸負方向の外側とX軸正方向の外側との間で、キャリッジ32を(記録ヘッド34と一体的に)2往復させることで、4パスが実行されて、1フレーム分の画像が印刷される。ただし、第4実施形態では、1パス目および3パス目のそれぞれにおいて、ライン画像L1、L3の形成に先立って、マークM1、M3がシートSに形成される。なお、図7においてキャリッジ32に関する表記(実線・破線)が示す意味は、図4のそれと同様である。
【0098】
第4実施形態における1パス目および2パス目の動作は、第1実施形態と同様であるので省略し、3パス目以後の動作について主に説明する。上述のとおり、第4実施形態では、この3パス目において、ライン画像L3の形成に先立ってマークM3が形成される。この際、メカコントローラー420は、3パス目でマークM3が形成されると、マークM3の初期位置(形成時点でのマークM3の位置)を記憶する。続いて、3パス目におけるライン画像L3の形成が完了すると、メカコントローラー420は、この時点におけるマークM3の初期位置からの変位量を求める。そして、マークM3の変位量が所定の閾値以上である場合は表面改質処理を実行すると判断する一方、マークM1の変位量が所定の閾値未満である場合は表面改質処理を実行しないと判断する。そして、表面改質処理を実行しないと判断された場合は、そのまま4パス目が実行されて、ライン画像L4が形成される。
【0099】
一方、表面改質処理を実行すると判断された場合は、ライン画像L4の形成に先立って、シートSの有効印刷領域IRの全域に渡って表面改質処理が実行される。具体的には、第1実施形態での2パス目と同様の動作が4パス目で実行される。こうして、表面改質処理が施されたシートSに対してライン画像L4を形成しつつ4パス目が実行されて、1フレーム分の印刷が完了する。
【0100】
以上のように第4実施形態においても、シートSのY軸方向への伸びを検出するために、シートSに形成されたマークM1、M3の変位を検出するといった構成を備えており、このマークM1、M3の変位の検出結果に基づいてシートSへの表面改質処理を適宜実行する。その結果、シートSがY軸方向に伸びた場合であっても、ライン画像L2〜L4の幅を増大させて、上述の隙間の発生を抑制することが可能となっている。
【0101】
第5実施形態
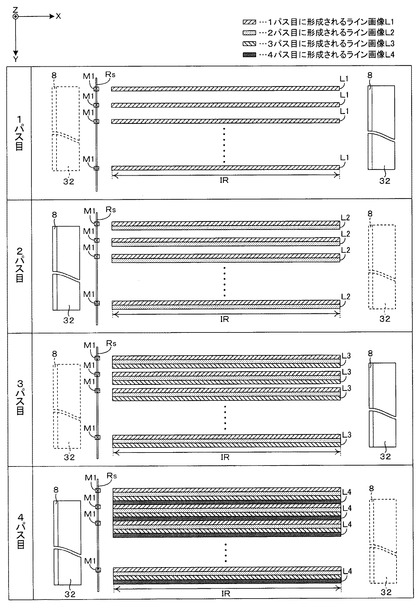
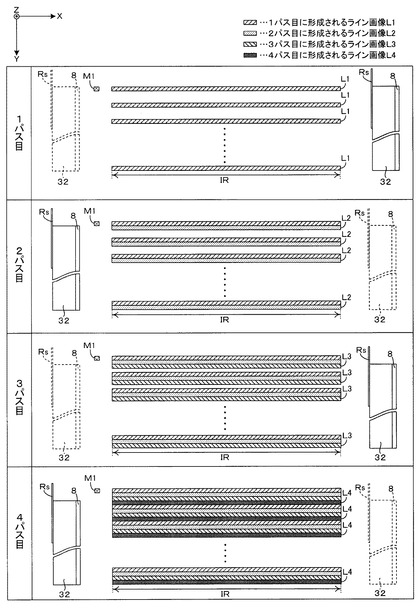
図8は、第5実施形態における印刷動作を模式的に示す図である。図8の例においても、有効印刷領域IRのX軸負方向の外側とX軸正方向の外側との間で、キャリッジ32を(記録ヘッド34と一体的に)2往復させることで、4パスが実行されて、1フレーム分の画像が印刷される。なお、図8においてキャリッジ32に関する表記(実線・破線)が示す意味は、図4のそれと同様である。
【0102】
第5実施形態では、キャリッジ32のX軸方向の両側にコロナ処理機8a、8bが取り付けられている。このように構成することで、2〜4パス目の各パスにおいて、ライン画像L2〜L4とこれに形成に先立つ面改質処理との両方を実行可能となる。つまり、2パス目および4パス目では、上記実施形態と同様に、Y軸負方向にキャリッジ32を移動させつつ、キャリッジ32のY軸負方向側のコロナ処理機8aを動作させることで、ライン画像L2、L4の形成に先立って表面改質処理を実行できる。また、3パス目では、Y軸正方向にキャリッジ32を移動させつつ、キャリッジ32のY軸正方向側のコロナ処理機8aを動作させることで、ライン画像L3の形成に先立って表面改質処理を実行できる。
【0103】
また、第5実施形態では、1フレームを構成する4パスのうち1パス目〜3パス目において、ライン画像L1〜L3の形成に先立ってマークM1〜M3がシートSに形成される。これによって、マークM1、M3は、有効印刷領域IRのX軸負方向の外側に形成される一方、マークM2は、有効印刷領域IRのX軸正方向の外側に形成される。また、このようなマークM1〜M3の形成位置に対応して、有効印刷領域IRのX軸方向の両外側では、光学センサーSo(ラインセンサー)が配置されており、各光学センサーSoの検出領域Rs1、Rs2が位置している。これにより、検出領域Rs1においてマークM1、M3が検出されて、各マークM1、M3の位置情報がメカコントローラー420に出力される。また、検出領域Rs2においてマークM2が検出されて、各マークM2の位置情報がメカコントローラー420に出力される。
【0104】
このような構成を備えた第5実施形態では、(n+1)パス目においてライン画像Lnの形成に先立って表面改質処理を実行するか否かの判断が、nパス目に形成されたマークMnの変位に基づいて決定される。ここで、nは正の整数であるとともに、nパス目に形成されるマークをMnと表示し、nパス目に形成されるライン画像をLnと表示した。
【0105】
つまり、nパス目でマークMnが形成されると、メカコントローラー420は、マークMnの初期位置(形成時点でのマークMnの位置)を記憶する。続いて、nパス目におけるライン画像Lnの形成が完了すると、メカコントローラー420は、この時点におけるマークMnの初期位置からの変位量を求める。そして、上述と同様にして、メカコントローラー420は、この変位量に応じて、以後に形成予定のライン画像L2〜L4(後続ライン画像)の形成に先立って、コロナ処理機8による表面改質処理を実行するか否かを判断する。そして、表面改質処理を実行しないと判断された場合は、そのまま(n+1)パス目が実行される。一方、表面改質処理を実行すると判断された場合は、(n+1)パス目において、ライン画像Ln+1が形成されるとともに、このライン画像Ln+1の形成に先立って表面改質処理が実行される。このようにして、1〜4パス目を実行することで、1フレーム分の印刷が完了する。
【0106】
以上のように第5実施形態においても、シートSのY軸方向への伸びを検出するために、シートSに形成されたマークM1〜M3の変位を検出するといった構成を備えており、このマークM1〜M3の変位の検出結果に基づいてシートSへの表面改質処理を適宜実行する。その結果、シートSがY軸方向に伸びた場合であっても、ライン画像L2〜L4の幅を増大させて、上述の隙間の発生を抑制することが可能となっている。
【0107】
第6実施形態
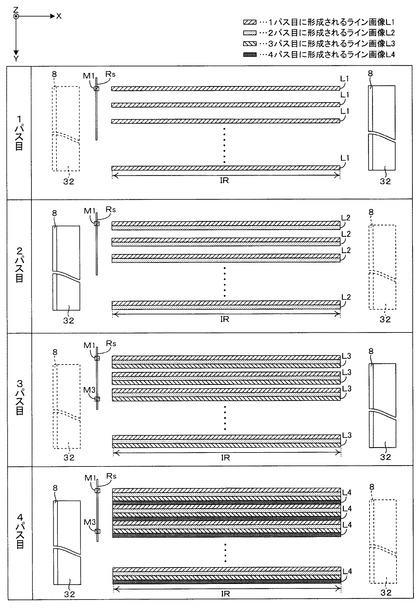
図9は、第6実施形態における印刷動作を模式的に示す図である。図9の例においても、有効印刷領域IRのX軸負方向の外側とX軸正方向の外側との間で、キャリッジ32を(記録ヘッド34と一体的に)2往復させることで、4パスが実行されて、1フレーム分の画像が印刷される。なお、図9においてキャリッジ32に関する表記(実線・破線)が示す意味は、図4のそれと同様である。
【0108】
上記実施形態と異なり、第6実施形態では、光学センサーSoがキャリッジ32に取り付けられており、キャリッジ32と一体的に移動する。この光学センサーSoは、キャリッジ32に対してX軸方向の負側に設けられており、その結果、光学センサーSoの検出領域Rsは、キャリッジ32のX軸方向の負側に位置する。また、コロナ処理機8は、キャリッジ32のX軸方向の正側に取り付けられている。このような構成を備える第6実施形態では、次のような印刷動作が実行される。
【0109】
1パス目では、マークM1が形成された後に、ライン画像L1が形成される。この際、キャリッジ32のX軸正方向への移動に伴って、光学センサーSoの検出領域RsがマークM1を通過する。これによって、光学センサーSoによりマークM1が検出されて、マークM1の位置情報がメカコントローラー420に出力される。一方、メカコントローラー420は、この時点でのマークM1の位置をマークM1の初期位置として記憶する。
【0110】
1パス目が完了すると、2パス目が実行されて、ライン画像L2が形成される。この2パス目では、ライン画像L2の形成後のキャリッジ32の移動に伴って、光学センサーSoの検出領域RsがマークM1を通過する。これによって、光学センサーSoによりマークM1が検出されて、マークM1の位置情報がメカコントローラー420に出力される。一方、メカコントローラー420は、この時点におけるマークM1の初期位置からの変位を求める。
【0111】
また、メカコントローラー420は、こうして求めたマークM1の変位量に応じて、以後に形成予定のライン画像L3、L4(後続ライン画像)の形成に先立って、コロナ処理機8による表面改質処理を実行するか否かを判断する。そして、表面改質処理を実行しないと判断された場合は、そのまま3パス目、4パス目が実行される。一方、表面改質処理を実行すると判断された場合は、3パス目において、ライン画像L3が形成されるとともに、このライン画像L3の形成に先立ってコロナ処理機8により表面改質処理が実行される。そして、この3パス目に続いて4パス目を実行することで、1フレーム分の印刷が完了する。
【0112】
以上のように第6実施形態においても、シートSのY軸方向への伸びを検出するために、シートSに形成されたマークM1〜M3の変位を検出するといった構成を備えており、このマークM1の変位の検出結果に基づいてシートSへの表面改質処理を適宜実行する。その結果、シートSがY軸方向に伸びた場合であっても、ライン画像L3、L4の幅を増大させて、上述の隙間の発生を抑制することが可能となっている。
【0113】
その他
以上のように、プリンター300が本発明の「画像記録装置」に相当し、シートSが本発明の「記録媒体」に相当し、インクが本発明の「液体」に相当し、プラテン30が本発明の「支持部材」に相当し、記録ヘッド34が本発明の「記録ヘッド」に相当し、ヘッドコントローラー410とメカコントローラー420とが協働して本発明の「画像記録制御部」として機能し、光学センサーSoとメカコントローラー420とが協働して本発明の「検出部」に相当し、コロナ処理機8が本発明の「表面改質部」に相当し、メカコントローラー420と放電バイアス発生部84が本発明の「表面改質制御部」に相当し、X軸方向が本発明の「主走査方向」に相当し、Y軸方向が本発明の「副走査方向」に相当し、1フレーム印刷処理が本発明の「画像記録処置」に相当している。
【0114】
なお、本発明は上記実施形態に限定されるものではなく、その趣旨を逸脱しない限りにおいて上述したものに対して種々の変更を加えることが可能である。例えば、上記実施形態では、メカコントローラー420は、マークの変位に基づいてコロナ処理機8による表面改質処理の実行の有無を判断していたが、これに加えて、表面改質処理を実行するコロナ処理機8のエネルギーを調整しても良い。具体的には、マークの変位の増大に応じて、放電バイアス発生部84が発生するバイアスを増大させて、コロナ処理機8からより大きなエネルギーをシートSに付与するように構成すれば良い。このように、マークの変位の検出結果に基づいて、表面改質処理のエネルギーを調整することで、ライン画像の幅を調整することが可能となり、上述の隙間の発生をより効果的に抑制することができる。
【0115】
この際、シートSのY軸方向に沿って連続的に表面改質処理でのエネルギーを調整可能であるように構成しても良い。このように構成することで、ライン画像の幅を調整してこれらの間における隙間の発生を抑制することができる。
【0116】
具体的には、コロナ放電電極82とプラテン30を平行に(一定の距離で)配置するのではなく、Y軸方向に沿って距離が異なるように配置すれば良い(つまり、コロナ放電電極82をプラテン30に対して傾けて配置する)。また、コロナ放電電極82を2本設けて、一方はY軸の正の方向に対して距離が離れるように配置し、他方はY軸方向の負の方向に対して距離が離れるように配置することで、いずれかのコロナ放電電極82に放電バイアスを印加すれば良い。また、コロナ放電電極82とプラテン30を平行に(一定の距離で)配置し、外径を連続的に太い(または細い)コロナ放電電極82に放電バイアスを印加しても良い。換言すれば、Y軸方向の一方側に向けて外径が連続的に太くあるいは細く変化するコロナ放電電極82を、その中心線がプラテン30(の表面)と平行となるように配置すれば良い。
【0117】
これらの構成では、アース電極ローラー81の表面とプラテン30の表面とが互いに傾いて対向する。したがって、表面改質処理においてシートSに付与されるエネルギーをY軸方向に沿って連続的に変化させることが可能となる。そして、実際にシートSに形成したマークMの変位に基づいて、コロナ放電電極82への印加バイアスを調整することで、表面改質処理でのエネルギーをY軸方向に沿って連続的に調整することができ、ライン画像の幅を高精度に制御することができる。その結果、ライン画像間における隙間の発生を抑制することが可能となる。
【0118】
また、上記第1〜第4実施形態では、キャリッジ32のX軸方向の片側にのみコロナ処理機8を取り付けていた。しかしながら、第1〜第4実施形態に対して、第5実施形態のようなX軸方向の両側にコロナ処理機8を取り付けた構成を適用しても良い。これにより、2パス目および4パス目以外に、3パス目においても、ライン画像L3の形成とこれに先立つ表面改質処理の両方を実行することができる。
【0119】
また、上記実施形態では、画像記録装置として、インクジェット式のプリンター300が採用されているが、インク以外の他の流体を噴射したり吐出したりする流体噴射装置を採用しても良い。また、微小量の液滴を吐出させる液体噴射ヘッド等を備える各種の液体噴射装置全般に本発明を適用可能である。この場合、液滴とは、液体噴射装置から吐出される液体の状態を指し、粒状、涙状、糸状に尾を引くものも含む。また、ここで言う液体とは、液体噴射装置が噴射させることができるような材料であれば良い。例えば、液相の状態にある物質が液体に含まれ、粘性の高いあるいは低い液状態、ゾル、ゲル水、その他の無機溶剤、有機溶剤、溶液、液状樹脂、液状金属(金属融液)のような流状体が液体に含まれる。また、顔料や金属粒子などの固形物からなる機能材料の粒子が溶媒に溶解、分散あるいは混合されたものが液体に含まれる。また、液体の代表的な例としては、上記実施形態で説明したようなインクや液晶等が挙げられる。ここで、インクとは、一般的な水性インク、油性インク、ジェルインク、ホットメルトインク等の各種液体組成物を包含するものとする。
【0120】
また、上記実施形態では、1フレームで実行される各副走査ではいずれもY軸正方向にのみキャリッジ32を移動させて、4本のライン画像L1〜L4をこの順番でY軸正方向に並べて形成していた。しかしながら、副走査においてキャリッジ32が移動可能な方向はY軸正方向に限られない。すなわち、1フレームで実行される各副走査において、Y軸負方向にキャリッジ32を移動させて、4本のライン画像L1〜L4をこの順番でY軸負方向(つまり、上記実施形態と逆方向)に並べて形成しても良い。あるいは、Y軸正方向にキャリッジ32を移動させる副走査と、Y軸負方向にキャリッジ32を移動させる副走査の両方を1フレーム中に実行しても良い。具体例を挙げると次のとおりである。
【0121】
つまり、1パス目のライン画像L1を形成した後に、3ライン分のライン画像の幅に相当する移動距離Y32だけY軸正方向にキャリッジ32を移動させる副走査を行って、2パス目のライン画像L2を形成する。これによって、例えば図4のライン画像L4に相当する位置に、2パス目のライン画像L2が形成される。その後、2パス目〜3パス目および3パス目〜4パス目のそれぞれで実行される副走査では、1ライン分のライン画像の幅に相当する移動距離Y32だけY軸負方向にキャリッジ32を移動させて、3パス目および4パス目を実行する。これによって最終的には、ライン画像L1、L4、L3、L2がこの順番でY軸正方向に並べて形成される。そして、このような印刷処理においても、副走査におけるキャリッジ32の移動距離Y32を、シートSに形成されたマークのY軸方向への変位に基づいて調整することで、上述の隙間の発生を抑制することが可能となる。
【0122】
また、上記実施形態では、4パスで1フレームの印刷を実行する場合を主に例示して説明を行った。しかしながら、1フレームの印刷を構成するパスの数は複数であれば良く、4パスに限られない。
【0123】
また、上記実施形態では、マークM1〜M3を記録ヘッド34によってシートSに形成していた。しかしながら、記録ヘッド34とは別にマークM1〜M3を形成する機能部を設けても良い。あるいは、予めマークM1〜M3の形成されているシートSを用いることもできる。
【0124】
また、上記実施形態では、コロナ処理機8はキャリッジ32に取り付けられていた。しかしながら、キャリッジ32とは別に設けられた、X軸方向に移動自在な移動部材に対してコロナ処理機8を取り付けても良い。この場合、後続ライン画像の形成に先立って、この移動部材をX軸方向に移動させつつコロナ処理機8による表面改質処理をシートSに実行するように構成すれば良い。
【0125】
また、上記実施形態では、コロナ処理により表面改質を実行していた。しかしながら、コロナ処理以外の手法、例えばプラズマ処理によって表面改質を実行するように構成しても良い。
【0126】
また、上記実施形態では、検出部を構成するにあたりラインセンサーを用いていた。しかしながら、ラインセンサー以外のセンサーを用いて検出部を構成しても良い。要するに、シートSに形成されたマークM1〜M3を検出できるものであれば足りる。
【0127】
また、上記実施形態では、ピエゾ方式を用いたインクジェットプリンターに対して本発明を適用した場合について説明した。しかしながら、サーマル方式を用いたインクジェットプリンターに対しても本発明を適用可能であることは言うまでもない。
【0128】
また、上記実施形態では、キャリッジ32をX軸方向に往復走査させて印刷動作を行う場合を例示して説明を行った。しかしながら、キャリッジ32をX軸方向の片方向にのみ走査させて印刷動作を行う構成に対しても、本発明を適用可能である。
【符号の説明】
【0129】
100…印刷システム、 200…ホスト装置、 300…プリンター、 400…プリンター制御部、 410…ヘッドコントローラー、 420…メカコントローラー、 30…プラテン、 31…記録ユニット、 32…キャリッジ、 33…支持板、 34…記録ヘッド、 35…ノズル、 35L…ノズル列、 8,8a,8b…コロナ処理機、 82…コロナ放電電極、 IR…有効印刷領域、 L1,L2,L3,L4…ライン画像、 So…光学センサー、 S…シート、 X…主走査方向、 Y…副走査方向
【技術分野】
【0001】
この発明は、記録媒体に液体を噴射して画像を記録する技術に関し、特に、主走査方向に移動する記録ヘッドから記録媒体へ液体を噴射してライン画像を形成する主走査を複数回行うことで、記録媒体に画像を記録する画像記録技術に関する。
【背景技術】
【0002】
特許文献1には、プラテン上に支持された記録媒体に対して、記録ヘッドが備えるノズルから液体であるインクを噴射して、記録媒体に画像を印刷する画像記録装置が記載されている。この画像記録装置の記録ヘッドは、記録媒体の幅方向(副走査方向)に並ぶ複数のノズルを備えるとともに、副走査方向に直交する主走査方向へ移動自在に構成されている。そして、記録ヘッドは、主走査方向に移動しながら各ノズルから記録媒体へ向けて液体を噴射する主走査を実行する。この主走査によって、記録媒体では、1つのノズルにより形成された主走査方向に延びる1ライン分の画像(ライン画像)が副走査方向に複数並ぶ。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2009−292129号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、上記のような画像記録装置では、複数回の主走査を実行することで、より高解像度な画像を得ることができる。具体的には、上記の主走査と、副走査方向へ記録ヘッドを移動させる副走査とを交互に実行して、複数回の主走査を実行すれば良い。つまり、主走査が1回完了すると、副走査が実行されて、記録ヘッドが副走査方向に移動する。また、この副走査に続いて、主走査が再び実行されて、記録ヘッドが主走査方向に移動する。これにより、先程の主走査により既に形成された複数のライン画像の間に、新たな主走査によるライン画像が形成される。この要領で主走査と副走査とを交互に実行して、複数の主走査を実行することで、先に形成されたライン画像の間に新たにライン画像を形成して、より高解像度な画像を印刷することができる。
【0005】
しかしながら、このようにして印刷を行った場合、水分や温度によって記録媒体が副走査方向に伸びてしまうことに起因して、次のような問題が発生するおそれがあった。つまり、上記のようにして複数の主走査を実行して、先に形成された複数のライン画像の間に新たなライン画像を形成する構成では、異なるタイミングで実行された主走査により形成されたライン画像が副走査方向に互いに隣接する。そのため、隣接するライン画像に注目したとき、一方のライン画像を形成した主走査から、他方のライン画像を形成する主走査までの期間に記録媒体が副走査方向に伸びて、これら一方と他方のライン画像の間に液体(インク)の抜けた隙間が発生してしまうおそれがあった。
【0006】
この発明は上記課題に鑑みてなされたものであり、主走査方向に移動する記録ヘッドから記録媒体へ液体を噴射してライン画像を形成する主走査を複数回行って、副走査方向に隣接するライン画像を互いに異なる主走査により形成する画像記録技術において、ライン画像間における隙間の発生を抑制する技術の提供を目的とする。
【課題を解決するための手段】
【0007】
この発明にかかる画像記録装置は、上記目的を達成するために、記録媒体を支持する支持部材と、主走査方向に移動しつつ支持部材に支持された記録媒体に液体を噴射して主走査方向に延びる1ライン分のライン画像を形成する主走査と、副走査方向に移動する副走査とを実行可能な記録ヘッドと、主走査と副走査とを記録ヘッドに交互に実行させることで、複数の主走査を実行して、副走査方向に隣接するライン画像を互いに異なる主走査により形成する画像記録処理を実行する画像記録制御部と、記録媒体の表面を改質する表面改質処理を実行する表面改質機と、記録媒体に形成されたマークの副走査方向への変位を検出する検出部と、画像記録処理の途中において、以後に形成予定の後続ライン画像の形成に先立って表面改質処理を実行するか否かを、検出部が検出したマークの変位に基づいて判断する表面改質制御部とを備え、表面改質制御部が表面改質処理を実行すると判断した場合は、表面改質機は、後続ライン画像の形成に先立って表面改質処理を実行し、画像記録制御部は、表面改質処理が実行された記録媒体に対して後続ライン画像を形成することを特徴としている。
【0008】
この発明にかかる画像記録方法は、上記目的を達成するために、主走査方向に移動しつつ支持部材に支持された記録媒体に液体を噴射して主走査方向に延びる1ライン分のライン画像を形成する主走査と、副走査方向に移動する副走査とを実行可能な記録ヘッドに、主走査と副走査とを交互に実行させることで、複数の主走査を実行して、副走査方向に隣接するライン画像を互いに異なる主走査により形成する画像記録処理を実行する画像記録方法において、記録媒体の表面を改質する表面改質処理を実行する表面改質工程と、記録媒体に形成されたマークの副走査方向への変位を検出する検出工程と、画像記録処理の途中において、以後に形成予定の後続ライン画像の形成に先立って表面改質処理を実行するか否かを、検出部が検出したマークの変位に基づいて判断する判断工程とを備え、判断工程で表面改質処理を実行すると判断した場合は、表面改質工程において後続ライン画像の形成に先立って表面改質処理が実行されるとともに、表面改質処理が実行された記録媒体に対して後続ライン画像が実行されることを特徴としている。
【0009】
このように構成された発明(画像記録装置および画像記録方法)では、主走査方向に記録ヘッドを移動させつつ記録ヘッドから液体を噴射して主走査方向に伸びる1ライン分のライン画像を形成する主走査と、副走査方向に記録ヘッドを移動させる副走査とが交互に実行される。このようにして複数の主走査が実行されて、副走査方向に隣接するライン画像が互いに異なる主走査により形成される(画像記録処理)。そのため、異なるタイミングで実行された主走査により形成されたライン画像が、副走査方向に隣接して並ぶこととなる。そして、このような構成では、記録媒体が副走査方向へ伸びた場合に、上述のような隙間が発生するおそれがあった。
【0010】
これに対して、この発明は、記録媒体の副走査方向への伸びを検出するために、記録媒体に形成されたマークの変位を検出するといった構成を備えており、このマークの変位の検出結果に基づいて記録媒体への表面改質処理を適宜実行する。具体的には、画像記録処理の途中において、マークの変位の検出結果から、以後に形成予定のライン画像(後続ライン画像)の形成に先立って記録媒体への表面改質処理を実行するか否かが判断される。これにより、記録媒体が副走査方向へ伸びた場合には、必要に応じて表面改質処理を実行することが可能となる。その結果、ライン画像の幅を増大させて、上述の隙間の発生を抑制することが可能となる。
【0011】
なお、上述の隙間は、記録媒体の全体に渡って一様に発生するとは限らず、部分的に発生する場合もある。したがって、表面改質機は、記録媒体の副走査方向に異なる複数の領域毎に表面改質処理を実行可能であり、表面改質制御部は、記録媒体の領域毎に表面改質処理を実行するか否かを判断するとともに、表面改質処理を実行すると判断した領域に対して表面改質機に表面改質処理を実行させるように画像記録装置を構成しても良い。これによって、表面改質処理を効率的に実行することができる。
【0012】
特に、画像記録制御部が、画像記録処理で実行する副走査としては、副走査方向の一方側へ記録ヘッドが移動する副走査のみを実行する画像記録装置においては、上述の隙間は、副走査方向において記録媒体の中心より一方側と反対の他方側で顕著になる(この理由は後述する)。そこで、表面改質機は、副走査方向において記録媒体の中心より当該一方側と反対側の半分に対してのみ表面改質処理を実行するように画像記録装置を構成しても良い。
【0013】
また、表面改質制御部は、表面改質機が表面改質処理のために記録媒体に与えるエネルギーを、検出部が検出したマークの変位に基づいて調整するとともに、表面改質機は、表面改質制御部により調整されたエネルギーを記録媒体に与えて表面改質処理を実行するように画像記録装置を構成しても良い。このように、マークの変位の検出結果に基づいて、表面改質処理のエネルギーを調整することで、ライン画像の幅を調整することが可能となり、上述の隙間の発生をより効果的に抑制することができる。
【0014】
この際、調整部は、表面改質処理で記録媒体に与えるエネルギーを副走査方向に沿って連続的に調整可能であるように構成しても良い。このような構成では、記録媒体に形成したマークの副走査方向の変位に基づいて、表面改質処理でのエネルギーを副走査方向に沿って連続的に調整することができ、ライン画像の副走査方向への幅を高精度に制御することができる。その結果、ライン画像間における隙間の発生を抑制することが可能となる。
【0015】
また、主走査方向および副走査方向に移動自在であるとともに記録ヘッドを搭載するキャリッジをさらに備え、記録ヘッドはキャリッジと一体的に移動することで、主走査における主走査方向への移動および副走査における副走査方向への移動を実行するように画像記録装置を構成することができる。この場合、表面改質機はキャリッジに搭載されており、主走査の実行の際にキャリッジと一体的に前記主走査方向に移動することで、主走査方向における後続ライン画像が形成される範囲に渡って表面改質処理を実行するように構成しても良い。これにより、表面改質処理を、主走査と並行して効率的に実行することができる。
【0016】
また、記録媒体は紙系の媒体であっても良い。このような紙系の媒体は、記録ヘッドから噴射される液体等の水分によって伸びやすく、その結果、上述のような隙間が発生するおそれがある。そこで、本発明を適用することで、この隙間の発生を抑制することが好適となる。
【0017】
また、記録媒体はフィルム系の媒体であっても良い。このようなフィルム系の媒体は、温度によって伸びやすく、その結果、上述のような隙間が発生するおそれがある。そこで、本発明を適用することで、この隙間の発生を抑制することが好適となる。
【図面の簡単な説明】
【0018】
【図1】本発明を適用可能な印刷システムの一例を示す模式図。
【図2】記録ユニットの構成を部分的に示す平面図。
【図3】図1の印刷システムが備える電気的構成を模式的に示すブロック図。
【図4】第1実施形態における印刷動作を模式的に示す図。
【図5】第2実施形態でのコロナ処理機の構成とマークの形成位置との関係を示す図。
【図6】第2実施形態における印刷動作を模式的に示す図。
【図7】第4実施形態における印刷動作を模式的に示す図。
【図8】第5実施形態における印刷動作を模式的に示す図。
【図9】第6実施形態における印刷動作を模式的に示す図。
【発明を実施するための形態】
【0019】
第1実施形態
図1は、本発明を適用可能な印刷システムの一例を示す模式図である。なお、図1や以下の図面では必要に応じて、装置各部の配置関係を明確にするために、Z軸を鉛直軸とするXYZ直交座標が併記されている。以下の説明では、各座標軸(の矢印)が向く方向を正方向とし、その反対方向を負方向とし、Z軸の正側を上側とし、Z軸の負側を下側として適宜取り扱う。
【0020】
印刷システム100は、パーソナルコンピューター等の外部装置から受信した画像データに基づいて印刷データを生成するホスト装置200と、ホスト装置200から受信した印刷データに基づいて画像を印刷するプリンター300とを備える。このプリンター300は、ロール状に巻かれた長尺なシートSを繰り出しつつ、このシートSに対してインクジェット方式を用いて画像を印刷するものである。
【0021】
図1に示すように、プリンター300は、略直方体形状を有する本体ケース1を備える。本体ケース1内部には、シートSを巻いたロールR1からシートSを繰り出す繰出部2と、繰り出されたシートSにインクを噴射して印刷を行う印刷室3と、インクが付着したシートSを乾燥させる乾燥部4と、乾燥後のシートSをロールR2として巻き取る巻取部5とが配置されている。
【0022】
より詳しくは、本体ケース1内は、XY平面に平行に(すなわち水平に)配置された平板状の基台6によってZ軸方向へ上下に区画されており、基台6の上側が印刷室3となっている。印刷室3内の略中央部では、プラテン30が基台6の上面に固定されている。プラテン30は矩形状を有しており、XY平面に平行なその上面によって、シートSを下側から支持する。そして、記録ユニット31が、プラテン30上に支持されたシートSに対して印刷を行う。
【0023】
一方、基台6の下側には、繰出部2、乾燥部4および巻取部5が配置されている。繰出部2は、プラテン30に対してX軸負方向の下側(図1の左斜め下)に配置されており、回転自在な繰出軸21を備えている。そして、この繰出軸21にシートSが巻きつけられて、ロールR1が支持されている。一方、巻取部5は、プラテン30に対してX軸正方向の下側(図1の右斜め下)に配置されており、回転自在な巻取軸51を備えている。そして、この巻取軸51にシートSが巻き取られて、ロールR2が支持されている。また、乾燥部4は、X軸方向における繰出部2と巻取部5との間で、プラテン30の直下に配置されている。なお、乾燥部4は、繰出部2および巻取部5に対してはやや上側にある。
【0024】
そして、繰出部2から巻取部5へと搬送されるシートSが、7本のローラー71〜77により案内されながら、印刷室3と乾燥部4とを順番に通過する。つまり、繰出部2が備える繰出軸21のX軸正方向にはローラー71が配置されており、繰出軸21からX軸正方向に繰り出されたシートSは、ローラー71に巻き掛けられて上へと案内される。
【0025】
ローラー71の上側であって印刷室3の内部には、2本のローラー72、73がX軸正方向にこの順に並んでいる。そして、ローラー71から上へと案内されたシートSは、これら2本のローラー72、73へ巻き掛けられる。
【0026】
ローラー72、73は、プラテン30を挟むようにしてX軸方向にまっすぐ並んで(すなわち水平に)配置されており、それぞれの頂部がプラテン30の上面(シートSを支持する面)と同一の高さとなるように位置調整されている。したがって、ローラー72に巻き掛けられたシートSは、ローラー73に到るまでの間、プラテン30の上面に摺接しつつ水平(X軸方向)に移動する。そして、ローラー73に巻き掛けられたシートSは、下へと案内される。
【0027】
ローラー73の下側(基台6より下側)には、2本のローラー74、75がX軸負方向にこの順に並んでいる。ローラー74とローラー75とに巻き掛けられたシートSは、両ローラー74、75の間においてX軸方向に平行に(すなわち水平に)案内される。また、ローラー74、75の間には乾燥部4が配置されている。したがって、ローラー74に巻き掛けられたシートSは、X軸負方向に向きを変えるとともに、ローラー75に到るまでの間に乾燥部4の内部を通過する。
【0028】
ローラー75の下側では、2本のローラー76、77がX軸正方向にこの順に並んでいる。そして、ローラー76に巻き掛けられたシートSは、X軸正方向に向きを変えてローラー77に到る。また、ローラー77に巻き掛けられたシートSは、ローラー77のX軸正方向に配置された巻取部5の巻取軸51に巻き取られる。
【0029】
このように、繰出部2から繰り出されたシートSは、印刷室3や乾燥部4を通過して巻取部5に巻き取られる。そして、このシートSに対して、印刷室3での印刷処理や乾燥部4の乾燥処理が施される。
【0030】
印刷室3での印刷処理は、プラテン30の上側に配置された記録ユニット31により実行される。この記録ユニット31は、印刷室3内のX軸負方向の端部(図1の左端部)に配置されたインクカートリッジCRから図示しないインク供給機構によって供給されたインクを、インクジェット方式によりシートSに噴射して印刷を行う。具体的には、この記録ユニット31は、キャリッジ32と、キャリッジ32の下面に取り付けられた平板状の支持板33と、支持板33の下面に取り付けられた複数の記録ヘッド34とを備える。
【0031】
図2は、記録ユニットの構成を部分的に示す平面図である。図2に示すように、支持板33の下面では、15個の記録ヘッド34がY軸方向に等ピッチで2行千鳥で並んでいる。これらの記録ヘッド34は、ノズル35からインクを噴射するものであり、互いに同一の構成を備えている。そこで以下では、1つの記録ヘッド34で代表して、その構成の詳細について説明する。
【0032】
記録ヘッド34の下面では、複数(例えば180個)のノズル35がY軸方向に等ピッチで直線状に並んで1つのノズル列35Lが構成されるとともに、複数のノズル列35LがX軸方向に等ピッチで並んでいる。記録ヘッド34の下面で並ぶ複数のノズル列35Lは、互いに異なるインク色に対応しており、例えば8色のインクを用いた場合は、8列のノズル列35Lが記録ヘッド34の下面に並ぶ。そして、同じノズル列35Lに属するノズル35は互いに同じ色のインクを噴射する一方、異なるノズル列35Lに属するノズル35は互いに異なる色のインクを噴射する。なお、ノズル35は、インクの詰まった微細管に取り付けられたピエゾ素子に電圧を印加して変形させることで、インクを管外に噴射するピエゾ方式によるものである。
【0033】
図1に戻って説明を続ける。上述のように構成された記録ユニット31のキャリッジ32は、支持板33および記録ヘッド34と一体的に移動自在となっている。具体的には、印刷室3内には、X軸方向に延びる第1ガイドレール36が設けられており、キャリッジ32は、第1CRモーターMx(図3)の駆動力を受けると、第1ガイドレール36に沿ってX軸方向に移動する。さらに、印刷室3内には、Y軸方向に延びる第2ガイドレール(図示省略)が設けられており、キャリッジ32は、第2CRモーターMy(図3)の駆動力を受けると、第2ガイドレールに沿ってY軸方向に移動する。
【0034】
そして、プラテン30の上面で停止するシートSに対して、記録ユニット31のキャリッジ32をXY面内で二次元的に移動させて、印刷が実行される。具体的には、記録ユニット31は、キャリッジ32をX軸方向(主走査方向)に移動させつつ記録ヘッド34の各ノズル35からシートSにインクを噴射する動作(主走査)を実行する。この主走査では、1つのノズルが噴射するインクにより形成されたX軸方向に延びる1ライン分の画像(ライン画像)が、Y軸方向に間隔を空けつつ複数並んで、二次元の画像が印刷される。そして、この主走査と、キャリッジ32をY軸方向(副走査方向)に移動させる副走査とが交互に実行されて、複数回の主走査が実行される(ラテラルスキャン方式)。
【0035】
つまり、記録ユニット31は1回の主走査を完了すると、副走査を行なってキャリッジ32をY軸方向に移動させる。続いて、記録ユニット31は、この副走査によって移動した位置から、キャリッジ32をX軸方向(の先程の主走査とは反対向き)に移動させる。これによって、先程の主走査により既に形成された複数のライン画像それぞれの間に、新たな主走査によるライン画像が形成される。そして、これら主走査と副走査とが交互に実行される。つまり、このプリンター300では、キャリッジ32をX軸方向に移動させつつノズル35からインクを噴射して、複数のライン画像から成る中間生成画像を形成する動作(主走査)を、Y軸方向への位置を変えながら(副走査)、複数回数実行することで、中間生成画像を重ね合わせた画像が形成される。
【0036】
このように、複数回の主走査を実行することで、1回の印刷が実行される。ここで、1回の主走査を「パス」と称することとし、複数回のパスにより実行される1回の印刷を「フレーム」と称することとする。また、1回のパスでシートSに形成される中間生成画像を「1パス画像」と称することとする。
【0037】
このような主走査と副走査を交互に繰り返して行う理由は、解像度を向上させるためである。つまり、M回のパスを実行して、M個の1パス画像を重ね合わせることで、1パス画像のM倍の解像度を有する1フレーム分の画像を得ることが可能となる。そこで、記録ユニット31は、印刷すべき画像の解像度に応じた回数のパスを実行して1フレームの印刷を実行する。
【0038】
ちなみに、キャリッジ32は、X軸方向に往復移動可能である。そこで、記録ユニット31は、キャリッジ32の往路および復路のそれぞれでパスを実行することで、複数のパスを効率的に実行している。
【0039】
上述のような1フレームの印刷は、シートSをX軸方向に間欠的に移動させながら繰り返し実行される。具体的には、プラテン30の上面のほぼ全域にわたる所定範囲が印刷領域となっている。そして、この印刷領域のX軸方向への長さに対応する距離(間欠搬送距離)を単位として、シートSをX軸方向へ間欠的に搬送するとともに、間欠搬送中にプラテン30の上面に停止するシートSに対して1フレームの印刷が行われる。具体的に言えば、プラテン30に停止するシートSに1フレームの印刷が終わると、シートSが間欠搬送距離だけX軸方向に搬送されて、シートSの未印刷の面がプラテン30に停止する。続いて、この未印刷面に新たに1フレームの印刷が実行され、これが完了すると、再びシートSが間欠搬送距離だけX軸方向に搬送される。そして、これら一連の動作が繰り返し実行される。
【0040】
なお、間欠搬送中にプラテン30の上面に停止しているシートSを平坦に保つために、プラテン30は、その上面に停止しているシートSを吸引する機構を備える。具体的には、プラテン30の上面には、図示しない多数の吸引孔が開口するとともに、プラテン30の下面には、吸引部37が取り付けられている。そして、吸引部37が動作することで、プラテン30の上面の吸引孔に負圧が発生して、シートSがプラテン30の上面に吸引される。そして、吸引部37は、印刷のためにシートSがプラテン30上に停止している間は、シートSを吸引することで、シートSを平坦に保つ一方、印刷が終了すると、シートSの吸引を止めて、シートSのスムーズな搬送を可能とする。
【0041】
さらに、プラテン30の下面には、ヒーター38が取り付けられている。このヒーター38は、プラテン30を所定温度(例えば45度)に加熱するものである。これにより、シートSは、記録ヘッド34から印刷処理を受けるのと並行して、プラテン30の熱によって1次乾燥されることとなる。そして、この1次乾燥により、シートSに着弾したインクの乾燥が促進される。
【0042】
こうして、プラテン30の上面において、1フレームの印刷を受けるとともに1次乾燥されたシートSは、シートSの間欠搬送に伴って移動して乾燥部4へ到達する。この乾燥部4は、乾燥用に加熱した空気により、シートSに着弾したインクを完全に乾燥させる乾燥処理を実行する。そして、この乾燥処理を受けたシートSは、シートSの間欠搬送に伴って巻取部5に到達して、ロールR2として巻き取られる。
【0043】
以上のようにして、記録ユニット31および乾燥部4によって、シートSに対して印刷・乾燥処理が施される。また、プリンター300は、上述した記録ユニット31や乾燥部4ほかに、コロナ処理機8やメンテナンスユニット9といった機能部を備える。続いて、これらの構成および動作の詳細について説明する。
【0044】
コロナ処理機8は、キャリッジ32のX軸負方向の端に取り付けられている。このコロナ処理機8は、コロナ放電電極82と、コロナ放電電極82を覆う電極カバー83とを備える。電極カバー83は、アースまたは所定の電位に接地されている。コロナ放電電極82は、放電バイアス発生部84(図3)から放電バイアスの印加を受けて、電極カバー83との間にコロナ放電を起こす。そうすると、このコロナ放電により大気中のガスがイオン化したイオンは、コロナ放電電極82と接地されたプラテン30との間の電界に従い輸送され、シートSの表面に付着する。これによって、シートSのコロナ放電電極82に対向する部分に表面改質が施される。なお、Y軸方向において、コロナ放電電極82はシートSよりも長く、シートSの両端はコロナ放電電極82の内側に位置する。したがって、コロナ放電によって、Y軸方向におけるシートSの全域に渡って、表面改質を行うことができる。
【0045】
そして、後に詳述するように、コロナ処理機8がキャリッジ32と一体的にX軸方向へ移動しつつコロナ放電を実行することで、シートSのX軸方向への所定幅に対して表面改質が実行される。こうして、コロナ放電によってシートSにエネルギーが与えられることで、シートSの表面が改質されて(表面改質処理)、シートSのインクに対する濡れ性が向上する。この濡れ性は、インクの種類、インクの極性、シートの材質等に応じて最適な組合せがあるが、この最適な組合せに応じて調整すれば良い。具体的には、コロナ放電電極82への放電バイアス、電極カバー83への電位またはプラテン30の電位を調整すれば良い。このように印刷処理に先立ってシートSに表面改質を施しておくことで、印刷処理におけるシートSへのインクの定着性を高めることができる。
【0046】
メンテナンスユニット9は、プラテン30からX軸負方向に外れた位置に設けられており、非印刷時にホームポジション(メンテナンスユニットの直上位置)に退避する記録ヘッド34に対してメンテナンスを行う。このメンテナンスユニット9は、15個の記録ヘッド34に対して一対一の対応関係で設けられた15個のキャップ91と、キャップ91を昇降する昇降部93とを有する。
【0047】
このメンテナンスユニット9で実行されるメンテナンスとしては、キャッピング、クリーニングおよびワイピングがある。キャッピングは、昇降部93によりキャップ91を上昇させて、ホームポジションにある記録ヘッド34をキャップ91で覆う処理である。このキャッピングにより、記録ヘッド34が有するノズル35内でインクの粘性が増大するのを抑制することができる。また、クリーニングは、記録ヘッド34をキャッピングした状態で、キャップ91内に負圧を発生させることにより、ノズル35から強制的にインクを排出する処理である。このクリーニングにより、粘性が増大したインクやインク中の気泡等をノズル35から除去することができる。ワイピングは、記録ヘッド34においてノズル35の開口が並ぶ面(ノズル開口形成面)を、図示しないワイパーにより拭く処理である。このワイピングにより、記録ヘッド34のノズル開口形成面からインクを拭き取ることができる。
【0048】
以上が、印刷システム100が備える装置構成の概要である。続いて、上述した図1に図3を加えて、図1の印刷システムが備える電気的構成について詳述する。ここで、図3は、図1の印刷システムが備える電気的構成を模式的に示すブロック図である。
【0049】
上述したとおり、印刷システム100は、プリンター300のほか、これを制御するホスト装置200を備える。このホスト装置200は、例えばパーソナルコンピューターにより構成されており、プリンター300の動作を制御するプリンタードライバー210を内蔵するほか、プリンター300との通信機能を司る転送制御部220を備える。なお、プリンタードライバー210は、ホスト装置200の備えるCPU(Central Processing Unit)がプリンタードライバー210用のプログラムを実行することで構築される。
【0050】
また、ホスト装置200は、プリンタードライバー用のプログラムが記憶されたメディア230にアクセスして、当該プログラムを読み出すメディア駆動部240を備える。このメディア230としては、CD(Compact Disc)、DVD(Digital Versatile Disc)、USB(Universal Serial Bus)メモリー等の種々のメディアを用いることができる。
【0051】
さらに、ホスト装置200は、作業者とのインターフェースとして、液晶ディスプレイ等で構成されるモニター250と、キーボードやマウス等で構成される操作部260とを備える。なお、タッチパネル式のディスプレイをモニター250として用いて、このモニター250のタッチパネルで操作部260を構成しても良い。モニター250には、印刷対象の画像のほかにメニュー画面が表示されている。したがって、作業者は、モニター250を確認しつつ操作部260を操作することで、メニュー画面から印刷設定画面を開いて、印刷媒体の種類、印刷媒体のサイズ、印刷品質、版数等の各種の印刷条件を設定することができる。
【0052】
印刷媒体(すなわちシートS)の種類は、紙系とフィルム系に大別される。具体例を挙げると、紙系には上質紙、キャスト紙、アート紙、コート紙等があり、フィルム系には合成紙、PET(Polyethylene terephthalate)、PP(polypropylene)等がある。印刷媒体のサイズとしては、シートSの幅(Y軸方向の幅)が設定される。印刷品質は、印刷する解像度に応じて用意された複数の印刷モードから1つの印刷モードを選択することで、設定することができる。例を挙げれば次のとおりである。つまり、上記プリンター300では、1フレームで実行されるパスの数を変えることで解像度を変化できる。そこで、1フレームで実行されるパスの数が異なる複数の印刷モードを用意しておき、印刷する解像度に応じたパス数の印刷モードを選択できるように構成すれば良い。これにより、選択した印刷モードのパス数に応じた解像度で印刷を実行することができる。なお、印刷モードに代えて解像度を直接入力することで、印刷品質を設定するように構成しても良い。版数は、印刷媒体の同一エリアに複数の版(画像)を重ねて印刷する際に設定されるものであり、具体的には、重ねて印刷する版の数が設定される。ちなみに、複数の版が設定されている場合は、モニター250に版毎の画像を表示することができる。
【0053】
そして、プリンタードライバー210は、上述のような、モニター250の表示や、操作部260からの入力の処理を制御するホスト制御部211を備える。つまり、ホスト制御部211は、メニュー画面や印刷設定画面等の各種画面をモニター250表示させるともに、各種画面において操作部260から入力された内容に応じた処理を行う。これにより、ホスト制御部211は、作業者からの入力に応じてプリンター300を制御するために必要な制御信号を生成する。
【0054】
また、プリンタードライバー210は、外部装置から受信した画像データに対して画像処理を施して、印刷データを生成する画像処理部213を備える。具体的には、解像度変換処理、色変換処理、ハーフトーン処理等といった画像処理が実行される。
【0055】
そして、ホスト制御部211で生成された制御信号や、画像処理部213で生成された印刷データは転送制御部220を介して、プリンター300の本体ケース1内に設けられたプリンター制御部400に転送される。この転送制御部220は、プリンター制御部400との間で双方向のシリアル通信が可能となっており、プリンター制御部400に制御信号や印刷データを転送するとともに、その応答信号をプリンター制御部400から受信してホスト制御部211に送信する。
【0056】
プリンター制御部400は、ヘッドコントローラー410とメカコントローラー420とを備える。ヘッドコントローラー410は、プリンタードライバー210から送信されてきた印刷データに基づいて、記録ヘッド34を制御する機能を司る。具体的には、ヘッドコントローラー410は、記録ヘッド34のノズル35からのインク噴射を、印刷データに基づいて制御する。この際、ノズル35からインクを噴射するタイミングは、キャリッジ32のX軸方向への移動に基づいて制御される。つまり、印刷室3内には、キャリッジ32のX軸方向の位置を検出するリニアエンコーダーE32が設けられている。そして、ヘッドコントローラー410は、リニアエンコーダーE32の出力を参照することで、キャリッジ32のX軸方向への移動に応じたタイミングで、ノズル35からインクを噴射させる。
【0057】
一方、メカコントローラー420は、シートSの間欠搬送やキャリッジ32の駆動を制御する機能を主として司る。具体的には、メカコントローラー420は、繰出部2、ローラー71〜77および巻取部5で構成されるシート搬送系を駆動する搬送モーターMsを、搬送モーターMsの回転を検出するエンコーダーEmcの出力に基づいて制御して、シートSの間欠搬送を実行する。また、メカコントローラー420は、第1CRモーターMxを制御することで、主走査のためのX軸方向への移動をキャリッジ32に実行させるとともに、第2CRモーターMxを制御することで、副走査のためのY軸方向への移動をキャリッジ32に実行させる。
【0058】
そして、ヘッドコントローラー410とメカコントローラー420とが同期を取りつつ、これらの制御を適宜実行することで、間欠搬送されるシートSに対して、解像度に応じた回数のパスが実行されて、1フレーム分の印刷が実行される。これにより、所望の解像度を有する1フレーム分の画像がシートSに印刷される。
【0059】
また、メカコントローラー420は、印刷処理のための上記制御のほかに種々の制御を実行できる。具体的には、メカコントローラー420は、電源スイッチSWのオン/オフを検出して、電源スイッチSWがオンした場合には、プリンター300の各部の起動処理を実行する。また、メカコントローラー420は、プラテン30上面の温度を検出する温度センサーS30の出力に基づいて、ヒーター38をフィードバック制御したり、乾燥部4の内部の温度を検出する温度センサーS4の出力に基づいて、乾燥部4をフィードバック制御したりといった温度制御を実行する。さらに、メカコントローラー420は、吸引部37を制御してプラテン30の吸引孔に発生する負圧を調整したり、メンテナンスユニット9を制御して所定のメンテナンスを実行したり、放電バイアス発生部84を制御して放電バイアスの値を調整したりといった各動作を実行可能である。
【0060】
以上が、図1の印刷システムが備える電気的構成の概要である。続いて、第1実施形態で実行される印刷動作の詳細について、図4を用いて説明する。図4は、第1実施形態における印刷動作を模式的に示す図である。同図の例では、X軸方向に所定幅を有する有効印刷領域IRに、1フレーム分の画像を4パスで印刷する動作が示されている。なお、「1パス目」〜「4パス目」の各欄にて、破線で示したキャリッジ32はパスの開始地点にあるキャリッジ32を表しており、実線で示したキャリッジ32はパスの終了地点にあるキャリッジ32を表している。同図に示すように、有効印刷領域IRのX軸負方向の外側とX軸正方向外側の間で、キャリッジ32を(記録ヘッド34と一体的に)2往復させることで、4パスが実行されて、1フレーム分の画像が印刷される。
【0061】
同図の「1パス目」の欄に示すように、1パス目では、キャリッジ32がシートSの有効印刷領域IRの上側をX軸正方向へ通過するとともに、記録ヘッド34の各ノズル35から液体(インク)が噴射される。これによって、シートSでは、複数のライン画像L1がY軸方向に間隔を空けて並ぶ。こうして1パス目の主走査が完了すると、副走査が実行されて、キャリッジ32がY軸正方向へ移動距離Y32だけ移動する。
【0062】
この副走査が完了すると、同図の「2パス目」の欄に示すように、キャリッジ32がシートSの有効印刷領域IRの上側をX軸負方向へ通過するとともに、記録ヘッド34の各ノズル35から液体が噴射される。これによって、シートSでは、1パス目に形成された複数のライン画像L1それぞれの間に新たなライン画像L2が1本ずつ形成される。こうして2パス目の主走査が完了すると、副走査が実行されて、キャリッジ32がY軸正方向へ移動距離Y32だけ移動する。続いて、「1パス目」「2パス目」と同じ要領で「3パス目」「4パス目」が実行されて、有効印刷領域IRに1フレーム分の画像が印刷される。
【0063】
このように4パスを実行することで、1本のノズル35が4本のライン画像L1〜L4をY軸方向に隣接して形成する。そして、この動作を複数のノズル35のそれぞれが実行することで、ライン画像L1〜L4がY軸方向に繰り返し並んで形成される。こうして、1パス画像の4倍の解像度を有する1フレーム分の画像が印刷される。
【0064】
ところで、この実施形態では、上述のように、主走査と副走査とを記録ヘッド34に交互に実行させることで複数の主走査を実行して1フレーム分の画像を印刷する1フレーム印刷処理(画像記録処置)と並行して、表面改質処理がシートSに対して施される。以下では、この表面改質処理について詳述する。
【0065】
1フレームを構成する4パスのうち最初のパス(すなわち、1パス目)では、ライン画像L1の形成に先立って、マークM1がシートSに形成される。つまり、1パス目の実行のためにキャリッジ32がX軸正方向への移動を開始すると、記録ヘッド34のノズル35から液体が噴射されて、有効印刷領域IRのX軸負方向の外側にマークM1が形成される。そして、このマークM1の形成後に、有効印刷領域IRにライン画像L1が形成される。なお、このマークM1の形成は、キャリッジ32に備えられた複数のノズル35のうち、Y軸方向の最上流にあるノズル35により行われる。したがって、マークM1は、Y軸方向の上流端に形成されることとなる。
【0066】
こうして形成されたマークM1は光学センサーSoにより検出される。つまり、有効印刷領域IRのX軸負方向の外側は、プラテン30の上面に対向して光学センサーSoが配置されている。この光学センサーSoは、プラテン30に対する位置が固定された状態で本体ケース1により支持されたラインセンサーである。具体的には、光学センサーSoは、その検出領域Rsの長手方向がY軸方向と平行となるように位置決めされており、検出領域Rsにある検出対象物(ここでは、マークM1)を検出する。そして、光学センサーSoは、検出対象物のY軸方向への位置に関する情報を、メカコントローラー420に送信する。これにより、メカコントローラー420は、シートS上に形成されたマークM1のY軸方向への変位をモニターすることができる。
【0067】
そして、メカコントローラー420は、こうして検出したマークM1のY軸方向への変位に基づいて、コロナ処理機8による表面改質処理を実行するか否かを判断する。つまり、マークM1のY軸方向への変位は、シートSのY軸方向への伸びを反映している。そこで、メカコントローラー420は、マークM1のY軸方向への変位を参照することで、シートSのY軸方向への伸びに応じて、適宜表面改質処理を適宜実行するといった構成を備える。つまり、マークM1の変位からシートSのY軸方向への伸びが大きいと判断される場合は、表面改質処理を実行して、シートSに形成されるライン画像の幅(Y軸方向の幅)を増大させ、これによって、シートSの伸びに起因する隙間の発生が抑制される。
【0068】
具体的には、1パス目でマークM1が形成されると、メカコントローラー420は、マークM1の初期位置(形成時点でのマークM1の位置)を記憶する。続いて、1パス目におけるライン画像L1の形成が完了すると、メカコントローラー420は、マークM1のこの時点での位置と初期位置とを比較して、ライン画像L1の形成によって生じたマークM1の変位量を求める。そして、メカコントローラー420は、この変位量に応じて、以後に形成予定のライン画像L2〜L4(後続ライン画像)の形成に先立って、コロナ処理機8による表面改質処理を実行するか否かを判断する。具体的には、マークM1の変位量が所定の閾値(例えば、10[μm])以上である場合は表面改質処理を実行すると判断する一方、マークM1の変位量が所定の閾値未満である場合は表面改質処理を実行しないと判断する。そして、表面改質処理を実行しないと判断された場合は、そのまま2パス目が実行されて、ライン画像L2が形成される。
【0069】
一方、表面改質処理を実行すると判断された場合は、ライン画像L2の形成に先立って、シートSの有効印刷領域IRの全域に渡って表面改質処理が実行される。具体的には、この表面改質処理は、先程の1パス目に続く2パス目の主走査と並行して実行される。つまり、2パス目の実行のためにキャリッジ32がX軸負方向への移動を開始して、コロナ処理機8のコロナ放電電極82が有効印刷領域IRに対向する位置に到達すると、放電バイアス発生部84が放電バイアスをコロナ放電電極82に印加して、表面改質処理が開始される。続いて、これより少し遅れて、記録ヘッド34が有効印刷領域IRに到達したタイミングから2パス目のライン画像L2の形成が開始される。これにより、ライン画像L2は、表面改質処理の施された有効印刷領域IRに対して形成される。こうして、キャリッジ32をX軸負方向へ移動させつつ、表面改質処理とライン画像L2の形成とを実行することで、表面改質処理の直後にライン画像L2を形成するといった動作が有効印刷領域IRの全域に渡って実行される。
【0070】
こうして2パス目が完了すると、続いて3パス目が実行される。そして、3パス目においてライン画像L3の形成が完了すると、メカコントローラー420はこの時点におけるマークM1の初期位置からの変位量を求める。続いて、上述と同様にして、メカコントローラー420は、この変位量に応じて、以後に形成予定のライン画像L4(後続ライン画像)の形成に先立って、コロナ処理機8による表面改質処理を実行するか否かを判断する。そして、表面改質処理を実行しないと判断された場合は、そのまま4パス目が実行されて、ライン画像L4が形成される。一方、表面改質処理を実行すると判断された場合は、上述の2パス目と同じ要領で4パス目が実行されて、ライン画像L4は、表面改質処理の施された有効印刷領域IRに対して形成されることとなる。こうして4パス目が実行されて、1フレーム分の印刷が完了する。
【0071】
以上のように構成された実施形態では、X軸方向(主走査方向)に記録ヘッド34を移動させつつ記録ヘッド34から液体を噴射してライン画像L1〜L4を形成する主走査と、Y軸方向(副走査方向)に記録ヘッド34を移動させる副走査とが交互に実行される。このようにして複数の主走査が実行されて、Y軸方向に隣接するライン画像L1〜L4が互いに異なる主走査(パス)により形成される。そのため、異なるタイミングで実行された主走査(パス)により形成されたライン画像L1〜L4が、Y軸方向に隣接して並ぶこととなる。ただし、このような構成では、シートSがY軸方向へ伸びた場合に、上述のような隙間が発生するおそれがあった。
【0072】
このような問題に対して、この実施形態は、シートSのY軸方向への伸びを検出するために、シートSに形成されたマークM1の変位を検出するといった構成を備えており、このマークM1の変位の検出結果に基づいてシートSへの表面改質処理を適宜実行する。具体的には、1フレーム分の画像を印刷する1フレーム印刷処理(画像記録処置)の途中において、マークM1の変位の検出結果から、以後に形成予定のライン画像L2〜L4(後続ライン画像)の形成に先立ってシートSへの表面改質処理を実行するか否かが判断される。これにより、シートSがY軸方向へ伸びた場合には、必要に応じて表面改質処理を実行することが可能となる。その結果、ライン画像L2〜L4の幅を増大させて、上述の隙間の発生を抑制することが可能となる。
【0073】
また、上記実施形態では、コロナ処理機8はキャリッジ32に搭載されており、主走査の実行の際にキャリッジ32と一体的にX軸方向に移動することで、X軸方向における有効印刷領域IR(つまり、後続ライン画像が形成される範囲)の全域に渡って表面改質処理を実行する。これにより、表面改質処理を、主走査と並行して効率的に実行することが可能となっている。
【0074】
また、この実施形態では、マークM1は、記録ヘッド34がシートSに液体を噴射することで、シートSに形成されている。このような構成では、マークM1を形成するタイミングや位置を適宜調整できるといった利点がある。
【0075】
また、この実施形態では、マークM1は、主走査の実行中にX軸方向に移動する記録ヘッド34がシートSに液体を噴射することで、シートSに形成されている。このような構成は、主走査の実行中にマークM1を形成することができるため、マークM1を形成するための動作を別途実行する必要がなく、印刷速度の向上を図るにあたって有利となる。
【0076】
ところで、上述のようにシートSに液体を噴射してライン画像L1〜L4を形成する構成では、ライン画像L1〜L4を形成する度にシートSに付着する液量が増して、シートSがY軸方向へ伸びていく傾向にある。この場合、ライン画像L1〜L4の形成により発生するシートSのこのような伸びを、マークM1の変位に反映させることが好適となる。
【0077】
そこで、この実施形態は、マークM1の形成が行われる1パス目の主走査において、当該マークM1を形成してからライン画像L1を形成している。したがって、ライン画像L1の形成の際に発生するシートSの伸びを、マークM1の変位に反映させることができる。その結果、上述の隙間の発生を、より確実に抑制することが可能となる。
【0078】
また、この実施形態では、複数の主走査(4パス)のうち、最初に実行される主走査(1パス目)の実行中にマークM1が形成される。このように構成することで、各主走査で画像ラインL1〜L4が形成される際に発生するシートSの伸びを、マークM1の変位に反映させることができる。その結果、上述の隙間の発生を、より確実に抑制することが可能となる。
【0079】
また、この実施形態は、光学センサーSoは、検出領域Rsの長手方向がY軸方向に平行に配置されたラインセンサーを有し、このラインセンサーがマークを検出した結果に基づいて、マークM1のY軸方向への変位を検出している。このようなラインセンサーを用いることで、マークM1のY軸方向への変位を確実に捉えることができる。
【0080】
また、上述のように、シートSとしては紙系の媒体およびフィルム系の媒体の両方が使用可能である。なお、紙系の媒体は、記録ヘッド34から噴射される液体等の水分によって伸びやすく、その結果、上述のような隙間が発生するおそれがある。そこで、この実施形態のように構成することで、隙間の発生を抑制することが好適となる。また、フィルム系の媒体は、温度によって伸びやすい。特に、プラテン30でシートSを加熱する構成では、温度による伸びが顕著となるおそれがある。そこで、この実施形態のように構成することで、隙間の発生を抑制することが好適となる。
【0081】
第2実施形態
ところで、シートSの伸び方は、Y軸方向への位置によって異なる場合がある。そこで、これから説明する第2実施形態では、複数のマークM1がY軸方向において互いに異なる位置に形成されおり、これによって、Y軸方向の異なる位置におけるシートSの伸び方の違いが、マークM1の変位により検出可能となっている。さらに、このマークM1の変位を検出した結果に基づいて、Y軸方向の所定範囲毎に表面改質処理を実行できるように、コロナ処理機8が構成されている。具体的には、コロナ処理機8は複数のコロナ放電電極82をY軸方向に並べた構成を備えており、各コロナ放電電極82に対してマークM1がk個ずつ形成される(図5)。ここで、図5は、第2実施形態でのコロナ処理機の構成とマークの形成位置との関係を示す模式図である。
【0082】
続いて、このような構成を備える第2実施形態の詳細について説明する。なお、以下では、第1実施形態との差異を中心に説明する一方、共通部分については説明を適宜省略する。ただし、第1実施形態と共通する構成を備えることで、第2実施形態においても第1実施形態と同様の効果が奏されることは言うまでも無い。また、この点は、第2実施形態に続いて説明する第3〜第6実施形態についても同様である。
【0083】
図6は、第2実施形態における印刷動作を模式的に示す図である。図6の例においても、図4と同様に、有効印刷領域IRのX軸負方向の外側とX軸正方向の外側との間で、キャリッジ32を(記録ヘッド34と一体的に)2往復させることで、4パスが実行されて、1フレーム分の画像が印刷される。なお、図6においてキャリッジ32に関する表記(実線・破線)が示す意味は、図4のそれと同様である。
【0084】
第2実施形態においても、1フレームを構成する4パスのうち最初のパス(すなわち、1パス目)では、ライン画像L1の形成に先立って、マークM1がシートSに形成される。ただし、第1実施形態と異なり、キャリッジ32に備えられた複数のノズル35のそれぞれが、1つずつマークM1を形成する。これによって、複数のマークM1がY軸方向に並ぶ。
【0085】
一方、上述のとおり、コロナ処理機8は、複数のコロナ放電電極82をY軸方向に並べた構成を備えている。そして、複数のコロナ放電電極82は、それぞれが対向するシートSの領域R82に対する表面改質処理を担当する。したがって、複数のマークM1がY軸方向に並べて形成されることで、各コロナ放電電極82が表面改質処理を分担する領域R82毎にk個のマークM1がY軸方向に並んで形成される(つまり、各コロナ放電電極82に対してk個ずつマークM1が形成される)。ここで、kは正の整数とする。
【0086】
そして、第2実施形態では、Y軸方向に複数のマークM1が並ぶ全域に渡って、光学センサーSo(ラインセンサー)の検出領域Rsが設けられており、複数のマークM1それぞれの位置に関する情報が光学センサーSoからメカコントローラー420に送信される。そして、メカコントローラー420は、この各マークM1の位置情報に基づいて、以後に形成予定のライン画像L2〜L4(後続ライン画像)の形成に先立って、コロナ処理機8による表面改質処理を実行するか否かを判断する。
【0087】
つまり、1パス目で複数のマークM1が形成されると、メカコントローラー420は、各マークM1の初期位置(形成時点での各マークM1の位置)を記憶する。続いて、1パス目におけるライン画像L1の形成が完了すると、メカコントローラー420は、この時点における各マークM1の初期位置からの変位量を求める。さらに、メカコントローラー420は、領域R82毎に形成されたk個のマークM1の変位量の平均値を算出する。こうして、複数の領域R82それぞれについて、k個のマークM1の平均変位量が算出される。そして、メカコントローラー420は、k個のマークM1の平均変位量が所定の閾値以上である領域R82に対して表面改質処理を実行すると判断する一方、k個のマークM1の平均変位量が所定の閾値未満である領域R82に対しては表面改質処理を実行しないと判断する。
【0088】
続く2パス目では、ライン画像L2の形成に先立って、表面改質処理を実行すると判断された領域R82に対して表面改質処理が実行される。具体的には、2パス目の実行後まもなく、コロナ処理機8のコロナ放電電極82が有効印刷領域IRに差し掛かると、表面改質処理を実行すると判断された領域R82を分担するコロナ放電電極82に対してのみ選択的に放電バイアスが印加されて、当該領域R82への表面改質処理が開始される。続いて、これより少し遅れて、記録ヘッド34が有効印刷領域IRに到達したタイミングから2パス目のライン画像L2の形成が開始される。こうして、キャリッジ32をX軸負方向へ移動させつつ、表面改質処理とライン画像L2の形成とを実行することで、表面改質処理の直後にライン画像L2を形成するといった動作が実行される。
【0089】
この2パス目が完了すると、続いて3パス目が実行される。そして、3パス目においてライン画像L3の形成が完了すると、メカコントローラー420はこの時点におけるマークM1の初期位置からの変位量を求める。続いて、上述と同様にして、メカコントローラー420は、この変位量に応じて、以後に形成予定のライン画像L4(後続ライン画像)の形成に先立って、コロナ処理機8による表面改質処理を実行するか否かを領域R82毎に判断し、この判断結果に基づいて4パス目を実行する。そして、1フレーム分の印刷が完了する。
【0090】
以上のように第2実施形態においても、シートSのY軸方向への伸びを検出するために、シートSに形成されたマークM1の変位を検出するといった構成を備えており、このマークM1の変位の検出結果に基づいてシートSへの表面改質処理を適宜実行する。その結果、シートSがY軸方向に伸びた場合であっても、ライン画像L2〜L4の幅を増大させて、上述の隙間の発生を抑制することが可能となっている。
【0091】
また、第2実施形態は、上述の隙間が記録媒体の全体に渡って一様に発生するとは限らず、部分的に発生する場合もあることに対応して、次のような構成を備えている。つまり、コロナ処理機8は、シートSのY軸方向に異なる複数の領域R82毎に表面改質処理を実行可能である。そして、メカコントローラー420は、シートSの複数の領域R82毎に表面改質処理を実行するか否かを判断するとともに、表面改質処理を実行すると判断した領域R82に対してコロナ処理機8に表面改質処理を実行させている。これによって、表面改質処理を効率的に実行することが可能となっている。
【0092】
なお、第2実施形態で示した例では、キャリッジ32に備えられた複数のノズル35の全てがマークM1を形成している。ただし、これら複数のノズル35の一部のノズル35(例えば、Y軸方向に1つ置きや2つ置きのノズル35)のみがマークM1を形成して、複数のマークM1をY軸方向において異なる位置に形成しても良い。
【0093】
第3実施形態
ところで、上述したように、シートSの伸び方がY軸方向への位置によって異なることに起因して、上述した隙間の発生態様が、シートSのY軸方向の正側と負側で異なる場合がある。具体的に説明すると次のとおりである。
【0094】
つまり、シートSの膨張は、Y軸方向の中央部を中心として、Y軸方向の両端間が広がるようにして発生する。したがって、シートSのY軸方向の正側はより正側へ広がって移動するとともに、シートSのY軸方向の負側はより負側へ広がって移動する。このような伸びを見せるシートSに対して、記録ヘッド34は、Y軸方向の負側から正側に移動しつつ(副走査)、各移動先でインクの噴射を実行する(主走査)。したがって、副走査に伴う記録ヘッド34の移動方向は、シートSのY軸方向の負側半分ではシートSが広がる方向に対して逆になる一方、シートSのY軸方向の正側半分ではシートSが広がる方向に対して順になる。その結果、シートSの伸びる方向と逆に記録ヘッド34が移動するシートSのY軸方向の負側半分において、上述の隙間の発生が特に顕著となる場合があった。
【0095】
そこで、上記第1実施形態や第2実施形態に対して、シートSの中心よりY軸負方向の半分に対してのみ表面改質処理を実行するように変形しても良い。具体的には、図5に示したように、Y軸方向に並ぶ複数のコロナ放電電極82でコロナ処理機8を構成するとともに、シートSの中心よりY軸方向の負側半分に位置するコロナ放電電極82についてのみ、表面改質処理の実行の有無を判断し、その他のコロナ放電電極82を動作させなければ良い。これにより、シートSのY軸方向の負側半分において特に顕著となっていた隙間の発生を、効果的に抑制することができる。
【0096】
ちなみに、シートSのY軸方向の幅は一定とは限らず、種々の幅のシートSに対して印刷処理を実行可能である。これに対して、この実施形態のように、Y軸方向に並ぶ複数のコロナ放電電極82でコロナ処理機8を構成しておけば、表面改質処理を実行するコロナ処理機を、シートSの幅に応じて選択することができる。その結果、シートSの幅が変化した場合であっても、シートSの中心よりY軸方向の負側半分に対して表面改質処理を実行するといった上記動作を適切に実行することができる。
【0097】
第4実施形態
図7は、第4実施形態における印刷動作を模式的に示す図である。図7の例においても、有効印刷領域IRのX軸負方向の外側とX軸正方向の外側との間で、キャリッジ32を(記録ヘッド34と一体的に)2往復させることで、4パスが実行されて、1フレーム分の画像が印刷される。ただし、第4実施形態では、1パス目および3パス目のそれぞれにおいて、ライン画像L1、L3の形成に先立って、マークM1、M3がシートSに形成される。なお、図7においてキャリッジ32に関する表記(実線・破線)が示す意味は、図4のそれと同様である。
【0098】
第4実施形態における1パス目および2パス目の動作は、第1実施形態と同様であるので省略し、3パス目以後の動作について主に説明する。上述のとおり、第4実施形態では、この3パス目において、ライン画像L3の形成に先立ってマークM3が形成される。この際、メカコントローラー420は、3パス目でマークM3が形成されると、マークM3の初期位置(形成時点でのマークM3の位置)を記憶する。続いて、3パス目におけるライン画像L3の形成が完了すると、メカコントローラー420は、この時点におけるマークM3の初期位置からの変位量を求める。そして、マークM3の変位量が所定の閾値以上である場合は表面改質処理を実行すると判断する一方、マークM1の変位量が所定の閾値未満である場合は表面改質処理を実行しないと判断する。そして、表面改質処理を実行しないと判断された場合は、そのまま4パス目が実行されて、ライン画像L4が形成される。
【0099】
一方、表面改質処理を実行すると判断された場合は、ライン画像L4の形成に先立って、シートSの有効印刷領域IRの全域に渡って表面改質処理が実行される。具体的には、第1実施形態での2パス目と同様の動作が4パス目で実行される。こうして、表面改質処理が施されたシートSに対してライン画像L4を形成しつつ4パス目が実行されて、1フレーム分の印刷が完了する。
【0100】
以上のように第4実施形態においても、シートSのY軸方向への伸びを検出するために、シートSに形成されたマークM1、M3の変位を検出するといった構成を備えており、このマークM1、M3の変位の検出結果に基づいてシートSへの表面改質処理を適宜実行する。その結果、シートSがY軸方向に伸びた場合であっても、ライン画像L2〜L4の幅を増大させて、上述の隙間の発生を抑制することが可能となっている。
【0101】
第5実施形態
図8は、第5実施形態における印刷動作を模式的に示す図である。図8の例においても、有効印刷領域IRのX軸負方向の外側とX軸正方向の外側との間で、キャリッジ32を(記録ヘッド34と一体的に)2往復させることで、4パスが実行されて、1フレーム分の画像が印刷される。なお、図8においてキャリッジ32に関する表記(実線・破線)が示す意味は、図4のそれと同様である。
【0102】
第5実施形態では、キャリッジ32のX軸方向の両側にコロナ処理機8a、8bが取り付けられている。このように構成することで、2〜4パス目の各パスにおいて、ライン画像L2〜L4とこれに形成に先立つ面改質処理との両方を実行可能となる。つまり、2パス目および4パス目では、上記実施形態と同様に、Y軸負方向にキャリッジ32を移動させつつ、キャリッジ32のY軸負方向側のコロナ処理機8aを動作させることで、ライン画像L2、L4の形成に先立って表面改質処理を実行できる。また、3パス目では、Y軸正方向にキャリッジ32を移動させつつ、キャリッジ32のY軸正方向側のコロナ処理機8aを動作させることで、ライン画像L3の形成に先立って表面改質処理を実行できる。
【0103】
また、第5実施形態では、1フレームを構成する4パスのうち1パス目〜3パス目において、ライン画像L1〜L3の形成に先立ってマークM1〜M3がシートSに形成される。これによって、マークM1、M3は、有効印刷領域IRのX軸負方向の外側に形成される一方、マークM2は、有効印刷領域IRのX軸正方向の外側に形成される。また、このようなマークM1〜M3の形成位置に対応して、有効印刷領域IRのX軸方向の両外側では、光学センサーSo(ラインセンサー)が配置されており、各光学センサーSoの検出領域Rs1、Rs2が位置している。これにより、検出領域Rs1においてマークM1、M3が検出されて、各マークM1、M3の位置情報がメカコントローラー420に出力される。また、検出領域Rs2においてマークM2が検出されて、各マークM2の位置情報がメカコントローラー420に出力される。
【0104】
このような構成を備えた第5実施形態では、(n+1)パス目においてライン画像Lnの形成に先立って表面改質処理を実行するか否かの判断が、nパス目に形成されたマークMnの変位に基づいて決定される。ここで、nは正の整数であるとともに、nパス目に形成されるマークをMnと表示し、nパス目に形成されるライン画像をLnと表示した。
【0105】
つまり、nパス目でマークMnが形成されると、メカコントローラー420は、マークMnの初期位置(形成時点でのマークMnの位置)を記憶する。続いて、nパス目におけるライン画像Lnの形成が完了すると、メカコントローラー420は、この時点におけるマークMnの初期位置からの変位量を求める。そして、上述と同様にして、メカコントローラー420は、この変位量に応じて、以後に形成予定のライン画像L2〜L4(後続ライン画像)の形成に先立って、コロナ処理機8による表面改質処理を実行するか否かを判断する。そして、表面改質処理を実行しないと判断された場合は、そのまま(n+1)パス目が実行される。一方、表面改質処理を実行すると判断された場合は、(n+1)パス目において、ライン画像Ln+1が形成されるとともに、このライン画像Ln+1の形成に先立って表面改質処理が実行される。このようにして、1〜4パス目を実行することで、1フレーム分の印刷が完了する。
【0106】
以上のように第5実施形態においても、シートSのY軸方向への伸びを検出するために、シートSに形成されたマークM1〜M3の変位を検出するといった構成を備えており、このマークM1〜M3の変位の検出結果に基づいてシートSへの表面改質処理を適宜実行する。その結果、シートSがY軸方向に伸びた場合であっても、ライン画像L2〜L4の幅を増大させて、上述の隙間の発生を抑制することが可能となっている。
【0107】
第6実施形態
図9は、第6実施形態における印刷動作を模式的に示す図である。図9の例においても、有効印刷領域IRのX軸負方向の外側とX軸正方向の外側との間で、キャリッジ32を(記録ヘッド34と一体的に)2往復させることで、4パスが実行されて、1フレーム分の画像が印刷される。なお、図9においてキャリッジ32に関する表記(実線・破線)が示す意味は、図4のそれと同様である。
【0108】
上記実施形態と異なり、第6実施形態では、光学センサーSoがキャリッジ32に取り付けられており、キャリッジ32と一体的に移動する。この光学センサーSoは、キャリッジ32に対してX軸方向の負側に設けられており、その結果、光学センサーSoの検出領域Rsは、キャリッジ32のX軸方向の負側に位置する。また、コロナ処理機8は、キャリッジ32のX軸方向の正側に取り付けられている。このような構成を備える第6実施形態では、次のような印刷動作が実行される。
【0109】
1パス目では、マークM1が形成された後に、ライン画像L1が形成される。この際、キャリッジ32のX軸正方向への移動に伴って、光学センサーSoの検出領域RsがマークM1を通過する。これによって、光学センサーSoによりマークM1が検出されて、マークM1の位置情報がメカコントローラー420に出力される。一方、メカコントローラー420は、この時点でのマークM1の位置をマークM1の初期位置として記憶する。
【0110】
1パス目が完了すると、2パス目が実行されて、ライン画像L2が形成される。この2パス目では、ライン画像L2の形成後のキャリッジ32の移動に伴って、光学センサーSoの検出領域RsがマークM1を通過する。これによって、光学センサーSoによりマークM1が検出されて、マークM1の位置情報がメカコントローラー420に出力される。一方、メカコントローラー420は、この時点におけるマークM1の初期位置からの変位を求める。
【0111】
また、メカコントローラー420は、こうして求めたマークM1の変位量に応じて、以後に形成予定のライン画像L3、L4(後続ライン画像)の形成に先立って、コロナ処理機8による表面改質処理を実行するか否かを判断する。そして、表面改質処理を実行しないと判断された場合は、そのまま3パス目、4パス目が実行される。一方、表面改質処理を実行すると判断された場合は、3パス目において、ライン画像L3が形成されるとともに、このライン画像L3の形成に先立ってコロナ処理機8により表面改質処理が実行される。そして、この3パス目に続いて4パス目を実行することで、1フレーム分の印刷が完了する。
【0112】
以上のように第6実施形態においても、シートSのY軸方向への伸びを検出するために、シートSに形成されたマークM1〜M3の変位を検出するといった構成を備えており、このマークM1の変位の検出結果に基づいてシートSへの表面改質処理を適宜実行する。その結果、シートSがY軸方向に伸びた場合であっても、ライン画像L3、L4の幅を増大させて、上述の隙間の発生を抑制することが可能となっている。
【0113】
その他
以上のように、プリンター300が本発明の「画像記録装置」に相当し、シートSが本発明の「記録媒体」に相当し、インクが本発明の「液体」に相当し、プラテン30が本発明の「支持部材」に相当し、記録ヘッド34が本発明の「記録ヘッド」に相当し、ヘッドコントローラー410とメカコントローラー420とが協働して本発明の「画像記録制御部」として機能し、光学センサーSoとメカコントローラー420とが協働して本発明の「検出部」に相当し、コロナ処理機8が本発明の「表面改質部」に相当し、メカコントローラー420と放電バイアス発生部84が本発明の「表面改質制御部」に相当し、X軸方向が本発明の「主走査方向」に相当し、Y軸方向が本発明の「副走査方向」に相当し、1フレーム印刷処理が本発明の「画像記録処置」に相当している。
【0114】
なお、本発明は上記実施形態に限定されるものではなく、その趣旨を逸脱しない限りにおいて上述したものに対して種々の変更を加えることが可能である。例えば、上記実施形態では、メカコントローラー420は、マークの変位に基づいてコロナ処理機8による表面改質処理の実行の有無を判断していたが、これに加えて、表面改質処理を実行するコロナ処理機8のエネルギーを調整しても良い。具体的には、マークの変位の増大に応じて、放電バイアス発生部84が発生するバイアスを増大させて、コロナ処理機8からより大きなエネルギーをシートSに付与するように構成すれば良い。このように、マークの変位の検出結果に基づいて、表面改質処理のエネルギーを調整することで、ライン画像の幅を調整することが可能となり、上述の隙間の発生をより効果的に抑制することができる。
【0115】
この際、シートSのY軸方向に沿って連続的に表面改質処理でのエネルギーを調整可能であるように構成しても良い。このように構成することで、ライン画像の幅を調整してこれらの間における隙間の発生を抑制することができる。
【0116】
具体的には、コロナ放電電極82とプラテン30を平行に(一定の距離で)配置するのではなく、Y軸方向に沿って距離が異なるように配置すれば良い(つまり、コロナ放電電極82をプラテン30に対して傾けて配置する)。また、コロナ放電電極82を2本設けて、一方はY軸の正の方向に対して距離が離れるように配置し、他方はY軸方向の負の方向に対して距離が離れるように配置することで、いずれかのコロナ放電電極82に放電バイアスを印加すれば良い。また、コロナ放電電極82とプラテン30を平行に(一定の距離で)配置し、外径を連続的に太い(または細い)コロナ放電電極82に放電バイアスを印加しても良い。換言すれば、Y軸方向の一方側に向けて外径が連続的に太くあるいは細く変化するコロナ放電電極82を、その中心線がプラテン30(の表面)と平行となるように配置すれば良い。
【0117】
これらの構成では、アース電極ローラー81の表面とプラテン30の表面とが互いに傾いて対向する。したがって、表面改質処理においてシートSに付与されるエネルギーをY軸方向に沿って連続的に変化させることが可能となる。そして、実際にシートSに形成したマークMの変位に基づいて、コロナ放電電極82への印加バイアスを調整することで、表面改質処理でのエネルギーをY軸方向に沿って連続的に調整することができ、ライン画像の幅を高精度に制御することができる。その結果、ライン画像間における隙間の発生を抑制することが可能となる。
【0118】
また、上記第1〜第4実施形態では、キャリッジ32のX軸方向の片側にのみコロナ処理機8を取り付けていた。しかしながら、第1〜第4実施形態に対して、第5実施形態のようなX軸方向の両側にコロナ処理機8を取り付けた構成を適用しても良い。これにより、2パス目および4パス目以外に、3パス目においても、ライン画像L3の形成とこれに先立つ表面改質処理の両方を実行することができる。
【0119】
また、上記実施形態では、画像記録装置として、インクジェット式のプリンター300が採用されているが、インク以外の他の流体を噴射したり吐出したりする流体噴射装置を採用しても良い。また、微小量の液滴を吐出させる液体噴射ヘッド等を備える各種の液体噴射装置全般に本発明を適用可能である。この場合、液滴とは、液体噴射装置から吐出される液体の状態を指し、粒状、涙状、糸状に尾を引くものも含む。また、ここで言う液体とは、液体噴射装置が噴射させることができるような材料であれば良い。例えば、液相の状態にある物質が液体に含まれ、粘性の高いあるいは低い液状態、ゾル、ゲル水、その他の無機溶剤、有機溶剤、溶液、液状樹脂、液状金属(金属融液)のような流状体が液体に含まれる。また、顔料や金属粒子などの固形物からなる機能材料の粒子が溶媒に溶解、分散あるいは混合されたものが液体に含まれる。また、液体の代表的な例としては、上記実施形態で説明したようなインクや液晶等が挙げられる。ここで、インクとは、一般的な水性インク、油性インク、ジェルインク、ホットメルトインク等の各種液体組成物を包含するものとする。
【0120】
また、上記実施形態では、1フレームで実行される各副走査ではいずれもY軸正方向にのみキャリッジ32を移動させて、4本のライン画像L1〜L4をこの順番でY軸正方向に並べて形成していた。しかしながら、副走査においてキャリッジ32が移動可能な方向はY軸正方向に限られない。すなわち、1フレームで実行される各副走査において、Y軸負方向にキャリッジ32を移動させて、4本のライン画像L1〜L4をこの順番でY軸負方向(つまり、上記実施形態と逆方向)に並べて形成しても良い。あるいは、Y軸正方向にキャリッジ32を移動させる副走査と、Y軸負方向にキャリッジ32を移動させる副走査の両方を1フレーム中に実行しても良い。具体例を挙げると次のとおりである。
【0121】
つまり、1パス目のライン画像L1を形成した後に、3ライン分のライン画像の幅に相当する移動距離Y32だけY軸正方向にキャリッジ32を移動させる副走査を行って、2パス目のライン画像L2を形成する。これによって、例えば図4のライン画像L4に相当する位置に、2パス目のライン画像L2が形成される。その後、2パス目〜3パス目および3パス目〜4パス目のそれぞれで実行される副走査では、1ライン分のライン画像の幅に相当する移動距離Y32だけY軸負方向にキャリッジ32を移動させて、3パス目および4パス目を実行する。これによって最終的には、ライン画像L1、L4、L3、L2がこの順番でY軸正方向に並べて形成される。そして、このような印刷処理においても、副走査におけるキャリッジ32の移動距離Y32を、シートSに形成されたマークのY軸方向への変位に基づいて調整することで、上述の隙間の発生を抑制することが可能となる。
【0122】
また、上記実施形態では、4パスで1フレームの印刷を実行する場合を主に例示して説明を行った。しかしながら、1フレームの印刷を構成するパスの数は複数であれば良く、4パスに限られない。
【0123】
また、上記実施形態では、マークM1〜M3を記録ヘッド34によってシートSに形成していた。しかしながら、記録ヘッド34とは別にマークM1〜M3を形成する機能部を設けても良い。あるいは、予めマークM1〜M3の形成されているシートSを用いることもできる。
【0124】
また、上記実施形態では、コロナ処理機8はキャリッジ32に取り付けられていた。しかしながら、キャリッジ32とは別に設けられた、X軸方向に移動自在な移動部材に対してコロナ処理機8を取り付けても良い。この場合、後続ライン画像の形成に先立って、この移動部材をX軸方向に移動させつつコロナ処理機8による表面改質処理をシートSに実行するように構成すれば良い。
【0125】
また、上記実施形態では、コロナ処理により表面改質を実行していた。しかしながら、コロナ処理以外の手法、例えばプラズマ処理によって表面改質を実行するように構成しても良い。
【0126】
また、上記実施形態では、検出部を構成するにあたりラインセンサーを用いていた。しかしながら、ラインセンサー以外のセンサーを用いて検出部を構成しても良い。要するに、シートSに形成されたマークM1〜M3を検出できるものであれば足りる。
【0127】
また、上記実施形態では、ピエゾ方式を用いたインクジェットプリンターに対して本発明を適用した場合について説明した。しかしながら、サーマル方式を用いたインクジェットプリンターに対しても本発明を適用可能であることは言うまでもない。
【0128】
また、上記実施形態では、キャリッジ32をX軸方向に往復走査させて印刷動作を行う場合を例示して説明を行った。しかしながら、キャリッジ32をX軸方向の片方向にのみ走査させて印刷動作を行う構成に対しても、本発明を適用可能である。
【符号の説明】
【0129】
100…印刷システム、 200…ホスト装置、 300…プリンター、 400…プリンター制御部、 410…ヘッドコントローラー、 420…メカコントローラー、 30…プラテン、 31…記録ユニット、 32…キャリッジ、 33…支持板、 34…記録ヘッド、 35…ノズル、 35L…ノズル列、 8,8a,8b…コロナ処理機、 82…コロナ放電電極、 IR…有効印刷領域、 L1,L2,L3,L4…ライン画像、 So…光学センサー、 S…シート、 X…主走査方向、 Y…副走査方向
【特許請求の範囲】
【請求項1】
記録媒体を支持する支持部材と、
主走査方向に移動しつつ前記支持部材に支持された前記記録媒体に液体を噴射して前記主走査方向に延びる1ライン分のライン画像を形成する主走査と、副走査方向に移動する副走査とを実行可能な記録ヘッドと、
前記主走査と前記副走査とを前記記録ヘッドに交互に実行させることで、複数の前記主走査を実行して、前記副走査方向に隣接する前記ライン画像を互いに異なる前記主走査により形成する画像記録処理を実行する画像記録制御部と、
前記記録媒体の表面を改質する表面改質処理を実行する表面改質機と、
前記記録媒体に形成されたマークの前記副走査方向への変位を検出する検出部と、
前記画像記録処理の途中において、以後に形成予定の後続ライン画像の形成に先立って前記表面改質処理を実行するか否かを、前記検出部が検出した前記マークの変位に基づいて判断する表面改質制御部と
を備え、
前記表面改質制御部が前記表面改質処理を実行すると判断した場合は、前記表面改質機は、前記後続ライン画像の形成に先立って前記表面改質処理を実行し、前記画像記録制御部は、前記表面改質処理が実行された前記記録媒体に対して前記後続ライン画像を形成することを特徴とする画像記録装置。
【請求項2】
前記表面改質機は、前記記録媒体の前記副走査方向に異なる複数の領域毎に前記表面改質処理を実行可能であり、
前記表面改質制御部は、前記記録媒体の前記領域毎に前記表面改質処理を実行するか否かを判断するとともに、前記表面改質処理を実行すると判断した前記領域に対して前記表面改質機に前記表面改質処理を実行させる請求項1に記載の画像記録装置。
【請求項3】
前記画像記録制御部は、前記画像記録処理で実行する副走査としては、前記副走査方向の一方側へ前記記録ヘッドが移動する前記副走査のみを実行する請求項1または2に記載の画像記録装置であって、
前記表面改質機は、前記副走査方向において前記記録媒体の中心より前記一方側と反対側の半分に対してのみ前記表面改質処理を実行する画像記録装置。
【請求項4】
前記表面改質制御部は、前記表面改質機が前記表面改質処理のために前記記録媒体に与えるエネルギーを、前記検出部が検出した前記マークの変位に基づいて調整するとともに、前記表面改質機は、前記表面改質制御部により調整された前記エネルギーを前記記録媒体に与えて前記表面改質処理を実行する請求項1ないし3のいずれか一項に記載の画像記録装置。
【請求項5】
前記調整部は、前記表面改質処理で前記記録媒体に与えるエネルギーを前記副走査方向に沿って連続的に調整可能である請求項4に記載の画像記録装置。
【請求項6】
前記主走査方向および前記副走査方向に移動自在であるとともに前記記録ヘッドを搭載するキャリッジをさらに備え、前記記録ヘッドは前記キャリッジと一体的に移動することで、前記主走査における前記主走査方向への移動および前記副走査における前記副走査方向への移動を実行する請求項1ないし5のいずれか一項に記載の画像記録装置であって、
前記表面改質機は前記キャリッジに搭載されており、前記主走査の実行の際に前記キャリッジと一体的に前記主走査方向に移動することで、前記主走査方向における前記後続ライン画像が形成される範囲に渡って前記表面改質処理を実行する画像記録装置。
【請求項7】
前記記録媒体は紙系の媒体である請求項1ないし6のいずれか一項に記載の画像記録装置。
【請求項8】
前記記録媒体はフィルム系の媒体である請求項1ないし6のいずれか一項に記載の画像記録装置。
【請求項9】
主走査方向に移動しつつ前記支持部材に支持された前記記録媒体に液体を噴射して前記主走査方向に延びる1ライン分のライン画像を形成する主走査と、副走査方向に移動する副走査とを実行可能な記録ヘッドに、前記主走査と前記副走査とを交互に実行させることで、複数の前記主走査を実行して、前記副走査方向に隣接する前記ライン画像を互いに異なる前記主走査により形成する画像記録処理を実行する画像記録方法において、
前記記録媒体の表面を改質する表面改質処理を実行する表面改質工程と、
前記記録媒体に形成されたマークの前記副走査方向への変位を検出する検出工程と、
前記画像記録処理の途中において、以後に形成予定の後続ライン画像の形成に先立って前記表面改質処理を実行するか否かを、前記検出部が検出した前記マークの変位に基づいて判断する判断工程と
を備え、
前記判断工程で前記表面改質処理を実行すると判断した場合は、前記表面改質工程において前記後続ライン画像の形成に先立って前記表面改質処理が実行されるとともに、前記表面改質処理が実行された前記記録媒体に対して前記後続ライン画像が実行されることを特徴とする画像記録方法。
【請求項1】
記録媒体を支持する支持部材と、
主走査方向に移動しつつ前記支持部材に支持された前記記録媒体に液体を噴射して前記主走査方向に延びる1ライン分のライン画像を形成する主走査と、副走査方向に移動する副走査とを実行可能な記録ヘッドと、
前記主走査と前記副走査とを前記記録ヘッドに交互に実行させることで、複数の前記主走査を実行して、前記副走査方向に隣接する前記ライン画像を互いに異なる前記主走査により形成する画像記録処理を実行する画像記録制御部と、
前記記録媒体の表面を改質する表面改質処理を実行する表面改質機と、
前記記録媒体に形成されたマークの前記副走査方向への変位を検出する検出部と、
前記画像記録処理の途中において、以後に形成予定の後続ライン画像の形成に先立って前記表面改質処理を実行するか否かを、前記検出部が検出した前記マークの変位に基づいて判断する表面改質制御部と
を備え、
前記表面改質制御部が前記表面改質処理を実行すると判断した場合は、前記表面改質機は、前記後続ライン画像の形成に先立って前記表面改質処理を実行し、前記画像記録制御部は、前記表面改質処理が実行された前記記録媒体に対して前記後続ライン画像を形成することを特徴とする画像記録装置。
【請求項2】
前記表面改質機は、前記記録媒体の前記副走査方向に異なる複数の領域毎に前記表面改質処理を実行可能であり、
前記表面改質制御部は、前記記録媒体の前記領域毎に前記表面改質処理を実行するか否かを判断するとともに、前記表面改質処理を実行すると判断した前記領域に対して前記表面改質機に前記表面改質処理を実行させる請求項1に記載の画像記録装置。
【請求項3】
前記画像記録制御部は、前記画像記録処理で実行する副走査としては、前記副走査方向の一方側へ前記記録ヘッドが移動する前記副走査のみを実行する請求項1または2に記載の画像記録装置であって、
前記表面改質機は、前記副走査方向において前記記録媒体の中心より前記一方側と反対側の半分に対してのみ前記表面改質処理を実行する画像記録装置。
【請求項4】
前記表面改質制御部は、前記表面改質機が前記表面改質処理のために前記記録媒体に与えるエネルギーを、前記検出部が検出した前記マークの変位に基づいて調整するとともに、前記表面改質機は、前記表面改質制御部により調整された前記エネルギーを前記記録媒体に与えて前記表面改質処理を実行する請求項1ないし3のいずれか一項に記載の画像記録装置。
【請求項5】
前記調整部は、前記表面改質処理で前記記録媒体に与えるエネルギーを前記副走査方向に沿って連続的に調整可能である請求項4に記載の画像記録装置。
【請求項6】
前記主走査方向および前記副走査方向に移動自在であるとともに前記記録ヘッドを搭載するキャリッジをさらに備え、前記記録ヘッドは前記キャリッジと一体的に移動することで、前記主走査における前記主走査方向への移動および前記副走査における前記副走査方向への移動を実行する請求項1ないし5のいずれか一項に記載の画像記録装置であって、
前記表面改質機は前記キャリッジに搭載されており、前記主走査の実行の際に前記キャリッジと一体的に前記主走査方向に移動することで、前記主走査方向における前記後続ライン画像が形成される範囲に渡って前記表面改質処理を実行する画像記録装置。
【請求項7】
前記記録媒体は紙系の媒体である請求項1ないし6のいずれか一項に記載の画像記録装置。
【請求項8】
前記記録媒体はフィルム系の媒体である請求項1ないし6のいずれか一項に記載の画像記録装置。
【請求項9】
主走査方向に移動しつつ前記支持部材に支持された前記記録媒体に液体を噴射して前記主走査方向に延びる1ライン分のライン画像を形成する主走査と、副走査方向に移動する副走査とを実行可能な記録ヘッドに、前記主走査と前記副走査とを交互に実行させることで、複数の前記主走査を実行して、前記副走査方向に隣接する前記ライン画像を互いに異なる前記主走査により形成する画像記録処理を実行する画像記録方法において、
前記記録媒体の表面を改質する表面改質処理を実行する表面改質工程と、
前記記録媒体に形成されたマークの前記副走査方向への変位を検出する検出工程と、
前記画像記録処理の途中において、以後に形成予定の後続ライン画像の形成に先立って前記表面改質処理を実行するか否かを、前記検出部が検出した前記マークの変位に基づいて判断する判断工程と
を備え、
前記判断工程で前記表面改質処理を実行すると判断した場合は、前記表面改質工程において前記後続ライン画像の形成に先立って前記表面改質処理が実行されるとともに、前記表面改質処理が実行された前記記録媒体に対して前記後続ライン画像が実行されることを特徴とする画像記録方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【公開番号】特開2013−6308(P2013−6308A)
【公開日】平成25年1月10日(2013.1.10)
【国際特許分類】
【出願番号】特願2011−139390(P2011−139390)
【出願日】平成23年6月23日(2011.6.23)
【出願人】(000002369)セイコーエプソン株式会社 (51,324)
【Fターム(参考)】
【公開日】平成25年1月10日(2013.1.10)
【国際特許分類】
【出願日】平成23年6月23日(2011.6.23)
【出願人】(000002369)セイコーエプソン株式会社 (51,324)
【Fターム(参考)】
[ Back to top ]