
画像読取装置
【課題】取得する画像を鮮鋭化させるとともに、装置を小型化し、低価格化を図る。
【解決手段】画像読取装置1は、表面に指6が載置されるとともに、裏面から入射した光を拡散させる拡散板5と、拡散板5の裏面側から所定の照射角度で、拡散板5上に載置された指6に対して光を照射する光源11と、拡散板5上に載置された指6による光源11からの光の反射光が入射されるミラー13と、ミラー13で反射された光を受光することにより、拡散板上に載置された指6を拡散板5の裏面側から主走査方向に撮影し、画像信号を出力するCCD12と、光源11、ミラー13及びCCD12を少なくとも含む読取ユニット3を副走査方向に移動させるモータ25とを備える。拡散板5は、指6が載置される面を拡散面とし、光源11からの光が入射される面を非拡散面とする。
【解決手段】画像読取装置1は、表面に指6が載置されるとともに、裏面から入射した光を拡散させる拡散板5と、拡散板5の裏面側から所定の照射角度で、拡散板5上に載置された指6に対して光を照射する光源11と、拡散板5上に載置された指6による光源11からの光の反射光が入射されるミラー13と、ミラー13で反射された光を受光することにより、拡散板上に載置された指6を拡散板5の裏面側から主走査方向に撮影し、画像信号を出力するCCD12と、光源11、ミラー13及びCCD12を少なくとも含む読取ユニット3を副走査方向に移動させるモータ25とを備える。拡散板5は、指6が載置される面を拡散面とし、光源11からの光が入射される面を非拡散面とする。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、検知台の裏面側から被写体を撮影し、被写体の表面像を読み取る画像読取装置に関し、特に、鮮鋭な画像を得るのに適した装置に関する。
【背景技術】
【0002】
従来、個人を特定する方法の1つとして、指紋を利用するものがあり、この方法では、指紋の画像を装置に入力し、その入力された画像と予め登録された指紋の画像とを照合するのが一般的である。指紋画像の入力方法としては、例えば、被写体である指を検知台に載せた状態で検知台の裏面側から光を照射し、CCD(Charge Coupled Devices)等の二次元センサにより指を撮影する方法が用いられる。
【0003】
上述の方法では、指に照射された光の反射光を二次元センサで受光し、受光した光の強弱に応じて指紋の凹凸を画像化するが、二次元センサで受光する光が微弱であるため、指紋の凹凸を鮮明に取得することができないという問題があった。
【0004】
そこで、最近では、検知台に様々な光学部材を用いて、指の凹凸に応じてコントラストの差を大きくすることにより、指紋の凹凸を鮮明にする装置が提案されている。例えば、引用文献1、2及び3では、各々プリズムレンズ、オプティカルファイバプレート及び導光板を検知台に用いて指紋画像を取得する装置が記載されている。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2003−50993号公報
【特許文献2】特許第2579375号公報
【特許文献3】特開平10−143663号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかし、引用文献1及び2に記載の装置では、プリズムレンズやオプティカルファイバプレートを用いるため、これらの光学部材を配置するスペースを装置の内部に確保する必要があり、装置全体を小型化することが困難であるという問題があった。また、プリズムレンズやオプティカルファイバプレートは、特殊な光学部材であるため、装置のコストが増大するという問題があった。
【0007】
また、引用文献3に記載の装置では、検知台に導光板を用いるが、十分なコントラストを得ることができないため、指紋画像を鮮鋭化させることが困難であるという問題があった。
【0008】
さらに、引用文献1〜3の装置においては、受光部として二次元センサを用いているため、1枚の指紋画像を取得する際に複数の画像を合成する必要がある。この場合、合成する画像間の繋ぎ目に歪みが生じるため、画像を合成する際に歪みを補正したり、合成後の画像から歪みを取り除く等の画像処理が必要になる。従って、装置には、このような画像処理を行うための構成を予め備えておく必要があるため、画像処理用の回路やソフトウェアが複雑化し、装置の高額化を招くという問題があった。
【0009】
そこで、本発明は、上記従来の技術における問題点に鑑みてなされたものであって、取得する画像を鮮鋭化させることができるとともに、装置を小型化することができ、低価格化を図ることが可能な画像読取装置を提供することを目的とする。
【課題を解決するための手段】
【0010】
上記目的を達成するため、本発明は、指紋等の被写体を読み取る画像読取装置において、光を透過する板状部材により構成され、前記被写体を載置する被写体載置部と、前記被写体に対して光を照射する光源と、前記被写体を撮影し、画像信号を出力する撮像手段とを含む画像読取ユニットとを備え、前記画像読取ユニットは、前記被写体載置部の前記被写体が接する面の裏側に位置し、前記撮像手段に備えるラインセンサで前記被写体の受光面の1ラインを主走査として読み取る手段と、前記主走査に対して垂直な副走査方向に移動する搬送手段を有し、前記被写体載置部は、光を拡散させる拡散部材を有することを特徴とする。
【0011】
そして、本発明によれば、光源からの光を拡散部材を用いて拡散させることにより、コントラストが鮮明な画像を取得するため、画像を鮮鋭化させることが可能になる。また、特殊な光学部材を使用することなく拡散部材を用いるため、装置を小型化することができるとともに、装置の低価格化を図ることが可能になる。
【0012】
また、取得したライン毎の画像データを単に繋ぎ合わせて画像を取得することができるため、高度な画像合成処理を行う必要がなく、信号処理用の回路やソフトウェアの複雑化を解消することができ、装置の低価格化を図ることが可能になる。
【0013】
上記画像読取装置において、前記拡散部材は、前記被写体が載置される面に拡散面を有することができる。これにより、拡散部材によって拡散された光を被写体に対して効率的に照射することができるため、画像をより鮮鋭化させることが可能になる。
【0014】
上記画像読取装置において、前記拡散部材は、入射光を前記副走査方向に拡散させることができる。これにより、拡散部材によって拡散された光を被写体に対して効率的に照射することができるため、画像をより鮮鋭化させることが可能になる。
【0015】
上記画像読取装置において、前記光源は、前記拡散部材の拡散する角度に応じて前記照射角度を決定することができる。
【0016】
上記画像読取装置において、前記被写体が前記被写体載置部と接する位置において光の入射角度と等しい反射角度の光を前記ラインセンサが受光するように、前記光源及び前記ラインセンサを配置することができる。これにより、光源から被写体に対して照射された光の反射波を効率的にラインセンサが受光できるため、画像をより鮮鋭化させることが可能になる。
【0017】
上記画像読取装置において、前記拡散部材上に貼着され、前記被写体によって押圧される押圧位置を前記副走査方向の座標情報で出力するタッチパネルと、前記タッチパネルから出力される座標情報に基づき、該タッチパネル上での前記被写体の押圧位置の前記副走査方向への移動量を検出する検出手段とをさらに備え、前記搬送手段は、前記検出手段で検出される移動量に基づき、前記被写体の転動に追従させて前記読取ユニットを前記副走査方向に移動させることができる。これにより、被写体を転動させた場合であっても画像を鮮鋭化させることが可能になる。
【発明の効果】
【0018】
以上のように、本発明によれば、取得する画像を鮮鋭化させることができるとともに、装置を小型化することができ、低価格化を図ることが可能になる。
【図面の簡単な説明】
【0019】
【図1】本発明にかかる画像読取装置の第1の実施形態を示す外観図であり、(a)は斜視図、(b)は上面図である。
【図2】図1の画像読取装置の断面図である。
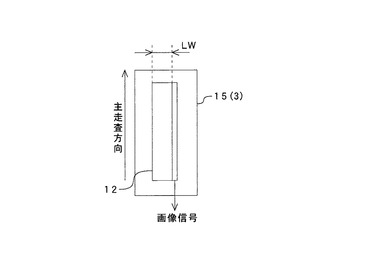
【図3】図2のCCDの平面図(図2のA線矢視方向で見た図)である。
【図4】図1の画像読取装置の機能構成の一例を示すブロック図である。
【図5】図1の画像読取装置の動作を説明するためのフローチャートである。
【図6】拡散板を用いた場合の指紋画像の鮮鋭化について説明するための略線図であり、(a)は指紋の山部、(b)は指紋の谷部に光を照射して画像を取得する場合の図である。
【図7】ミラーの配置について説明するための略線図である。
【図8】入射角及び反射角を等しくした場合の 指紋画像の鮮鋭化について説明するための略線図であり、(a)は指紋の山部、(b)は指紋の谷部に光を照射して画像を取得する場合の図である。
【図9】取得した指紋画像の一例を示す略線図であり、(a)は拡散板5を用いた場合の指紋画像、(b)は拡散板5を用いない場合の指紋画像である。
【図10】本発明にかかる画像読取装置の第2の実施形態を示す外観図であり、(a)は斜視図、(b)は上面図である。
【図11】図10の画像読取装置の断面図である。
【図12】図11のCCDの平面図(図11のA線矢視方向で見た図)である。
【図13】図10の画像読取装置の機能構成の一例を示すブロック図である。
【図14】図13の座標検出手段及び移動検出手段の構成の一例を示すブロック図である。
【図15】押圧位置の検出方法を示す略線図である。
【図16】読取開始位置までの移動量の算出方法を示す略線図である。
【図17】指の移動量の検出方法を示す略線図である。
【図18】画像データの有効化/無効化の選別方法を示すタイミング図である。
【図19】図10の画像選別手段の構成の一例を示すブロック図である。
【図20】図10のモータ制御手段の構成の一例を示すブロック図である。
【図21】図10の画像読取装置の動作手順を示すメインフローチャートである。
【図22】読取ユニットの位置補正を示す略線図であり、(a)は補正前、(b)は補正後の状態を示す図である。
【図23】図21の読取終了処理の動作手順を示すサブフローチャートである。
【図24】指の転動とCCDの移動との関係を示す略線図である。
【図25】図10の画像読取装置の動作を示すタイミング図であり、タッチパネル上に載置した指を正転方向にのみ転動させた場合の動作を示す図である。
【図26】図10の画像読取装置の動作を示すタイミング図であり、タッチパネル上に載置した指の転動方向を反転させた場合の動作を示す図である。
【図27】指の反転転動とCCDの移動との関係を示す略線図である。
【図28】指の押圧位置の移動量がライン幅に達したか否かを判定する方法の他の例を示す略線図である。
【発明を実施するための形態】
【0020】
次に、本発明を実施するための形態について、図面を参照しながら詳細に説明する。
【0021】
まず、本発明の第1の実施形態について説明する。ここでは、本発明にかかる画像読取装置を、指紋画像を読み取る画像読取装置に適用した場合を例にとって説明する。
【0022】
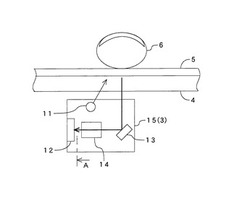
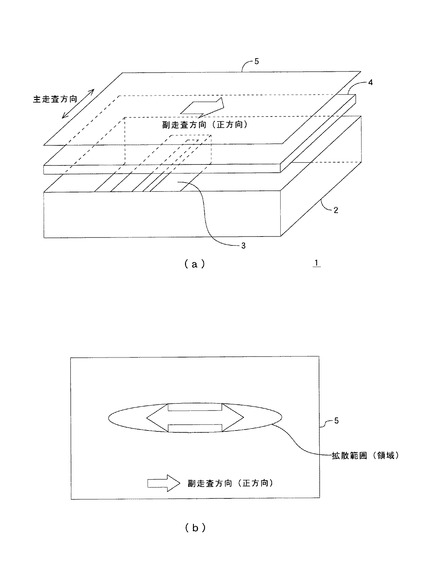
図1は、本発明にかかる画像読取装置の第1の実施形態を示し、図1(a)に示すように、この画像読取装置1は、スキャナ筐体2と、スキャナ筐体2内に収容され、モータ駆動により副走査方向に移動可能に構成された読取ユニット3と、スキャナ筐体2上に配置された透明のプラテンガラス4と、プラテンガラス4上に配置された拡散板5とから構成される。尚、図示を省略しているが、スキャナ筐体2の内側には、スライドレールが搭載され、また、読取ユニット3には、スライドレールと噛合する歯車、及び歯車を回転させるモータが搭載される。
【0023】
拡散板5は、図1(b)に示すように、例えば、上面視長方形状に形成され、図2に示すように、被写体である指6を載置する載置台として使用される。拡散板5は、例えば、ガラスや樹脂等で形成された基材の一方の面(拡散面)を擦りガラス(砂面)状とする処理が施され、他方の面から入射する光を拡散させるものである。
【0024】
拡散板5は、指6が載置される面が拡散面となり、後述する光源11からの光が入射される面が非拡散面となるように配置されるとともに、入射する光が読取ユニット3の副走査方向に広く、主走査方向に狭く拡散するように配置される。このように拡散板5を配置することにより、入射する光の拡散範囲(領域)は、例えば、読取ユニット3の副走査方向を長軸とする楕円状となり、拡散された光を指6に対して効率的に照射することができる。尚、拡散板5としては、この例に限られず、例えばシート状やフィルム状のものを使用することができる。
【0025】
プラテンガラス4は、拡散板5上に指6が載置されるときの支持台として機能するものであり、例えば、拡散板5よりも強度が高い透明ガラスによって構成される。
【0026】
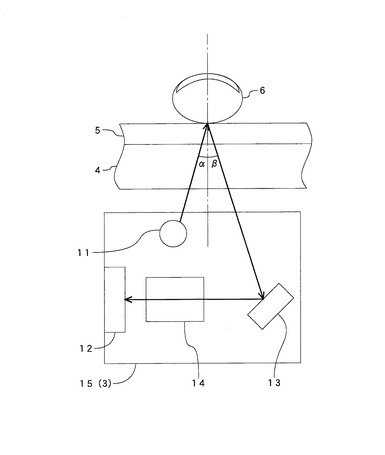
読取ユニット3は、図2に示すように、拡散板5上に載置された指6に光を照射する光源11と、画像を撮影するCCD(Charge Coupled Devices)12と、指6の指紋像をCCD12の受光面に導くミラー13及び光学レンズ14と、これら光源11、CCD12、ミラー13及び光学レンズ14を収容するユニット筐体15から構成される。
【0027】
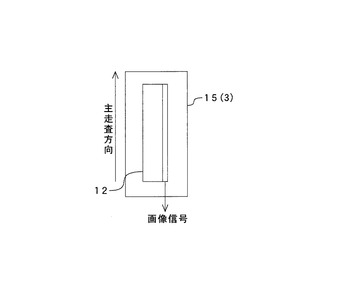
光源11による光の照射角度は、拡散板5の拡散角に応じて決定される。尚、光源11による光の照射角度は、これに限られず、例えば実験により決定してもよい。CCD12は、1ライン単位で画像を撮影し、受光した光を画像信号に変換して出力する1次元CCD(ラインセンサ)であり、図3に示すように、主走査方向に延びるように配置される。ミラー13は、被写体によって反射した光を受光し、光学レンズ14に対して反射する。ミラー13の受光角度は、例えば実験により決定することができる。
【0028】
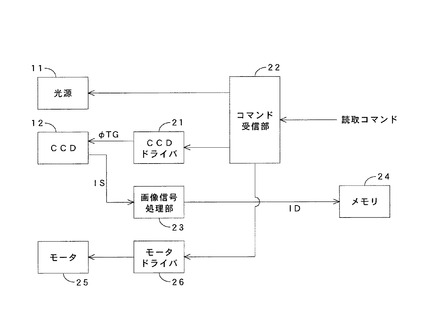
図4は、画像読取装置1の機能構成を示すブロック図である。同図に示すように、画像読取装置1は、光源11と、CCD12と、画像出力信号φTGを供給してCCD12を駆動し、CCD12から定期的に画像信号(アナログ信号)ISを出力させるCCDドライバ21と、外部からの読取コマンド(読取指令)に応じて、CCDドライバ21に指示を与えるとともに、光源11を点灯させるコマンド受信部22と、CCD12から出力される画像信号ISに対してA/D(Analog/Digital)変換等の所定の信号処理を施す画像信号処理部23と、画像信号処理部23から出力される画像データ(デジタル信号)IDを記憶するメモリ24と、読取ユニット3(図1参照)を副走査方向に移動させるステッピングモータ(以下、「モータ」という)25と、コマンド受信部22からの命令に基づきモータ25を制御するモータドライバ26等から構成される。尚、これらの光源11〜モータドライバ26は、いずれも図1の読取ユニット3内に搭載される。
【0029】
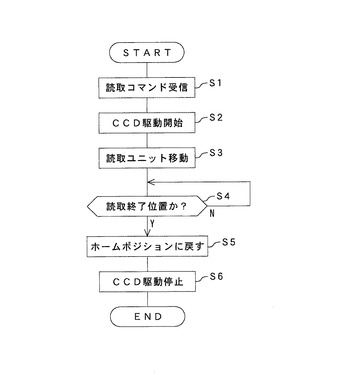
次に、上記構成を有する画像読取装置1の動作について説明する。図5は、画像読取装置1の動作を説明するためのフローチャートである。
【0030】
まず、画像読取装置1は、外部から読取コマンドを受信すると(ステップS1)、CCD12の駆動を開始し、CCD12による撮影が開始される(ステップS2)。
【0031】
次に、読取ユニット3を読取開始位置であるホームポジションから読取終了位置まで移動させ(ステップS3)、CCD12による撮影がライン毎に行われる。ライン毎に撮影することにより得られた画像信号ISは、画像信号処理部23に供給され、A/D変換等の所定の信号処理が施され、画像データIDとしてメモリ24に順次書き込まれて記憶される。
【0032】
次に、読取ユニット3が読取終了位置に到達したか否かが判断され(ステップS4)、読取ユニット3が読取終了位置に到達したと判断されると(ステップS4:Y)、読取操作を終了し、読取ユニット3をホームポジションに戻すとともに、CCD12の駆動を停止する(ステップS5、S6)。
【0033】
一方、ステップS4において、読取ユニット3が読取終了位置に到達していないと判断された場合には(ステップS4:N)、読取ユニット3が読取終了位置に到達するまでステップS4の処理が繰り返される。
【0034】
そして、読取操作が終了した時点で、メモリ24に記憶されたライン毎の画像データIDを繋ぎ合わせ、1枚の指紋画像を取得する。尚、画像データIDの繋ぎ合わせは、いわゆる画像合成処理のような、高度なデータ編集は不要であり、メモリ24に書き込んだ画像データIDを書き込み順序に従って読み出すだけでよい。
【0035】
ここで、拡散板5を用いた場合の指紋画像の鮮鋭化について説明する。指6を拡散板5上に載置した場合、拡散板5には、指紋の山部のみが接触し、谷部は接触しない。このような状態で拡散板5の裏面側から光を照射すると、指6による反射光の光量は、指紋の山部と谷部とで異なる。そこで、この第1の実施形態では、指6による反射光の光量に基づき、指紋の山部及び谷部によるコントラストを拡散板5を用いてより鮮明にすることで、指紋画像を鮮鋭化させる。
【0036】
図6は、拡散板5を用いた場合の指紋画像の鮮鋭化について説明する図であり、(a)は指紋の山部、(b)は指紋の谷部に光を照射して画像を取得する場合の図である。
【0037】
指紋の山部の画像を取得する場合は、図6(a)に示すように、光源11から出射された光がプラテンガラス4を透過し、拡散板5に入射される。このとき、拡散板5に入射された光は、拡散面で拡散方向に沿って拡散するが、指紋の山部が拡散板5に接しているため、指紋の山部に対して光を効率的に照射することができない。そのため、指紋の山部に照射される光は、光源11からの光に対して少ない状態で反射する。そして、指紋の山部で反射した光(反射光)は、拡散板5及びプラテンガラス4を透過してミラー13に入射し、光学レンズ14を介してCCD12の受光面で受光される。
【0038】
この場合、指紋の山部が拡散板5に接していることにより、光源11から照射され、拡散板5で拡散される光を効率的に指紋の山部に照射することができないため、ミラー13に入射する反射光は、光量が少なくなる。従って、CCD12で受光された反射光に基づき取得される画像は、暗い画像となる。
【0039】
一方、指紋の谷部の画像を取得する場合は、図6(b)に示すように、光源11から出射された光がプラテンガラス4を透過し、拡散板5の拡散面で拡散方向に沿って拡散する。このとき、指紋の谷部は、拡散板5に接触していないため、拡散された光(拡散光)は、拡散板5を透過して指紋の谷部に照射される。また、指紋の山部と山部との間の拡散板5に接していない副走査方向に広い範囲に照射される光源11からの光が拡散板5で拡散され、指紋の谷部に照射される。
【0040】
指紋の谷部に照射され、反射した光(反射光)は、拡散板5に入射し、拡散面でさらに拡散するとともに、プラテンガラス4を透過してミラー13に入射し、光学レンズ14を介してCCD12の受光面に受光される。また、指紋の谷部の拡散板5に接していない空間の読み取り位置周辺からの反射光についても、拡散板5の拡散面で効率的に拡散され、プラテンガラス4、ミラー13及び光学レンズ14を介してCCD12の受光面に受光される。
【0041】
この場合、指紋の谷部が拡散板5に直接接していないことにより、指紋の山部と山部との間の拡散板5に接していない広い範囲に照射される光源11からの光が拡散板5で拡散されて指紋の谷部に照射されるため、指紋の谷部に照射される光は、指紋の山部に対して照射される光よりも効率的に照射される。また、指紋の谷部からの反射光が拡散板5の拡散面で拡散される際に、指紋の谷部の拡散板5に接していない空間の読み取り位置周辺からの反射光についても拡散板5の拡散面で効率的に拡散される。そのため、ミラー13に入射する反射光は、指紋の山部からの反射光と比較して光量が多くなる。従って、CCD12で受光される光により取得される画像は、山部に光を照射した場合と比較して明るい画像となる。
【0042】
このように、ミラー13に入射する反射光の光量が指紋の山部及び谷部で異なるため、指紋の山部及び谷部のコントラストをより鮮明にすることができ、指紋画像を鮮鋭化させることができる。
【0043】
尚、例えば、拡散板5の拡散面が読取ユニット3側の面となるように、拡散板5を配置した場合には、プラテンガラス4と拡散板5との境界面で、光源11からの光が拡散されるため、指紋の山部及び谷部には、同様の光(拡散光)が照射されることになる。また、指紋の山部及び谷部からの反射光は、拡散板5の拡散面でさらに拡散されてミラー13に入射する。従って、CCD12で受光される指紋の山部及び谷部からの反射光の光量差は、拡散板5を用いない場合と同様の光量差となるため、指紋画像を鮮鋭化させることができない。
【0044】
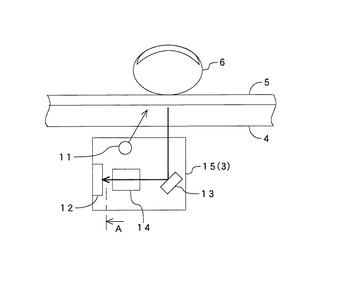
また、上述のようにして指紋画像を取得する際には、例えば、図7に示すように、指6に対する入射角と反射角とが等しくなるように、ミラー13を配置してもよい。こうすることにより、光源11から指6に対して照射された光の反射波を効率的にミラー13に入射させることができるため、指紋画像を鮮鋭化させることができる。
【0045】
例えば、光源11から指6に対して照射される光と、拡散板5に対して直交する指6からの垂線とにより形成される角を入射角αとし、また、指6で反射され、ミラー13に入射される反射光と指6からの垂線とにより形成される角を反射角βとした場合、この入射角α及び反射角βが等しくなるように、ミラー13の位置及び角度を決定する。
【0046】
図8は、入射角α及び反射角βが等しくなるようにミラー13を配置した場合の図であり、(a)は指紋の山部、(b)は指紋の谷部に光を照射して画像を取得する場合の図である。尚、図8(a)及び(b)では、説明を容易とするため、拡散板5による拡散光のうち、直進する光のみを図示している。
【0047】
指紋の山部の画像を取得する場合は、図8(a)に示すように、光源11から出射された光がプラテンガラス4及び拡散板5を介して指紋の山部に所定の入射角で照射される。このとき、指紋の山部は、拡散板5に接触しているため、拡散板5に入射された光は、拡散面においてほとんど拡散せずにそのまま反射し、一部の反射光が入射角と等しい反射角で反射する(直接反射光)。指紋の山部からの直接反射光は、拡散板5及びプラテンガラス4を透過してミラー13に入射し、光学レンズ14を介してCCD12の受光面で受光される。
【0048】
この場合、ミラー13に入射する直接反射光は、指紋の山部からの反射光のうちの一部であるため、光源11からの光に対して光量が少なくなる。従って、CCD12で受光される光に基づき取得される画像は、暗い画像となる。
【0049】
一方、指紋の谷部の画像を取得する場合は、図8(b)に示すように、光源11から出射された光がプラテンガラス4及び拡散板5を透過し、所定の入射角で拡散板5の表面に到達する。このとき、指紋の谷部は、拡散板5に接触しておらず、指紋の谷部と拡散板5の表面との間に空間が存在するため、光源11からの光の一部が拡散板5を透過するが、残りの光は、入射角と等しい反射角で反射する(直接反射光)。拡散板5の表面で反射した直接反射光は、拡散板5及びプラテンガラス4を透過してミラー13に入射し、光学レンズ14を介してCCD12の受光面で受光される。
【0050】
この場合、ミラー13に入射する直接反射光は、指紋の山部からの直接反射光と比較して光量が多くなる。そのため、CCD12で受光される光により取得される画像は、山部に光を照射した場合と比較して明るい画像となる。
【0051】
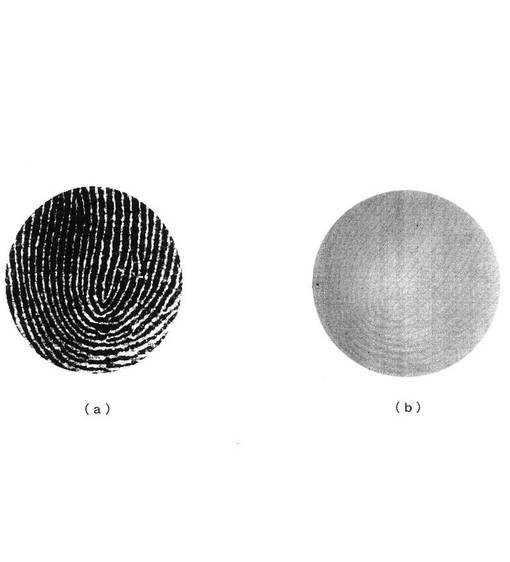
図9は、上述のようにして取得した指紋画像の一例を示し、(a)は拡散板5を用いた場合の指紋画像、(b)は拡散板5を用いない場合の指紋画像である。図9(a)に示すように、拡散板5を用いた場合には、図9(b)に示す拡散板5を用いない場合と比較して、指紋の山部及び谷部のコントラストが鮮明になるため、指紋画像を鮮鋭化させることができる。
【0052】
尚、上述の例では、ミラー13による反射光をCCD12で受光する構成を例にとって説明したが、この例に限られず、例えば、ミラー13の位置にCCD12を配置し、CCD12がミラー13を介さずに被写体からの反射光を直接受光できるようにしてもよい。この場合には、ミラー13の位置及び角度を決定するときと同様に、CCD12の位置及び受光面の角度を決定する。
【0053】
以上のように、第1の実施形態によれば、光源からの光を拡散板を用いて拡散させることにより指紋画像を生成するため、取得する指紋画像を鮮鋭化させることが可能になる。また、指紋画像を鮮鋭化させるために、プリズムレンズやオプティカルファイバプレート等の特殊な光学部材を使用することなく拡散板を用いるため、装置を小型化することができるとともに、装置の低価格化を図ることが可能になる。
【0054】
さらに、第1の実施形態によれば、ラインセンサを用い、取得したライン毎の画像データを単に繋ぎ合わせて指紋画像を取得するため、高度な画像合成処理を行う必要がなく、信号処理用の回路やソフトウェアの複雑化を解消することができ、装置の低価格化を図ることが可能になる。
【0055】
次に、本発明の第2の実施形態について説明する。第2の実施形態では、被写体を転動させた場合を例にとって説明する。尚、以下では、説明が煩雑となるのを避けるため、上述の第1の実施形態と共通する部分には、同一の符号を付し、詳細な説明を省略する。
【0056】
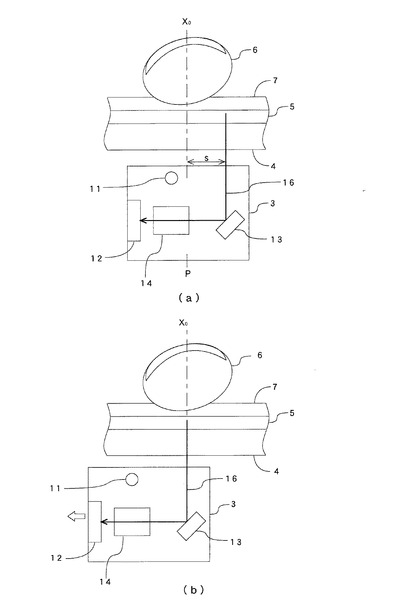
図10は、本発明にかかる画像読取装置の第2の実施形態を示し、同図(a)に示すように、この画像読取装置10は、スキャナ筐体2と、読取ユニット3と、プラテンガラス4と、拡散板5と、拡散板5上に貼着された透明のタッチパネル7とから構成される。
【0057】
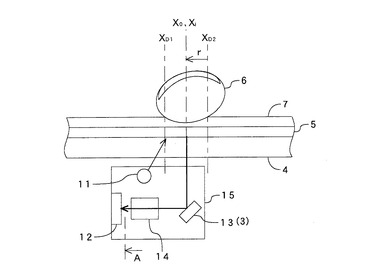
タッチパネル7は、図10(b)に示すように、例えば、上面視長方形状に形成され、図11に示すように、指6を載置する載置台として使用される。タッチパネル7では、図10(b)に示すように、短手方向(主走査方向)をY座標、長手方向(副走査方向)をX座標とし、指6が載置された位置を座標情報で出力する。尚、タッチパネル7のタイプには、抵抗膜方式、静電容量方式及び光学方式等があるが、いずれのものを用いてもよい。
【0058】
読取ユニット3は、図11に示すように、光源11、CCD12、ミラー13、光学レンズ14及びユニット筐体15から構成される。CCD12の受光面の幅(ライン幅)LWは、図12に示すように、タッチパネル7のX座標の1目盛り分の幅よりも大きい。
【0059】
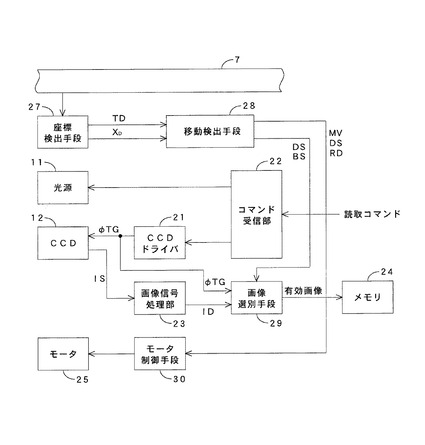
図13は、画像読取装置1の機能構成を示すブロック図である。同図に示すように、画像読取装置10は、タッチパネル7上の指6の位置を検出する座標検出手段27と、座標検出手段27の検出結果に基づいて指6の移動量を検出し、移動検出信号DSを出力する移動検出手段28と、光源11と、CCD12と、CCDドライバ21と、コマンド受信部22と、画像信号処理部23と、座標検出手段27の移動検出信号DS及びCCDドライバ21の画像出力信号φTGに基づき、画像信号処理部23から出力される画像データIDを有効画像データと無効画像データに選別する画像選別手段29と、画像選別手段29から出力される有効画像データを記憶するメモリ24と、モータ25と、モータ25を制御するモータ制御手段30等から構成される。尚、これらの座標検出手段27〜モータ制御手段30は、いずれも図10の読取ユニット3内に搭載される。
【0060】
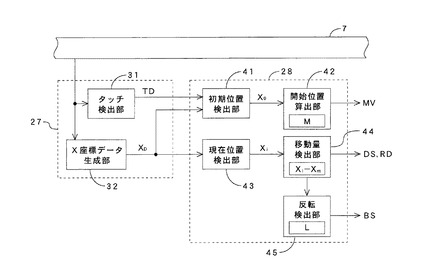
図14に示すように、座標検出手段27は、タッチパネル7の出力に応じて、指6がタッチパネル7上に載置されたか否かを検出し、タッチ検出信号TDを出力するタッチ検出部31と、タッチパネル7から出力されるX座標信号(指6がタッチパネル7を押圧した領域のうち、X座標方向の領域を示す信号)をA/D変換してX座標データXDを生成するX座標データ生成部32とを備える。
【0061】
また、移動検出手段28は、初期位置検出部41、開始位置算出部42、現在位置検出部43、移動量検出部44及び反転検出部45を備える。
【0062】
初期位置検出部41は、タッチ検出部31のタッチ検出信号TD及びX座標データ生成部32のX座標データXDに基づいて、指6がタッチパネル7を最初に押圧した位置(被検者が最初に指6を置いた位置)を検出し、検出した位置のX座標データを示す初期位置データX0を出力する。
【0063】
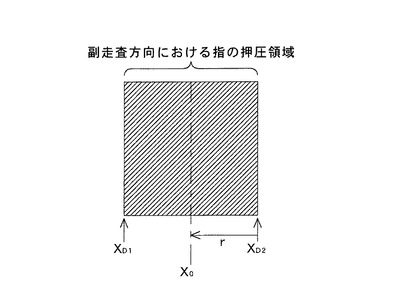
ここで、図15に示すように、副走査方向(X座標方向)における指6の押圧範囲は、タッチパネル7のX座標の1目盛り分の幅よりもはるかに大きいため、X座標データ生成部32から初期位置検出部41に与えられるX座標データXDは、左端のX座標データXD1から右端のX座標データXD2までの複数目盛り分の値となる。初期位置検出部41では、X座標データXD2から指6の内側に向かう方向へ所定量rだけ減算、又は、X座標データXD1から指6の内側に向かう方向へ所定量rだけ加算して座標値を補正し、この補正した値を指6の押圧位置と認定して初期位置データX0とする。
【0064】
尚、上記の補正機能は、必ずしも初期位置検出部41に搭載する必要はなく、座標検出手段27のX座標データ生成部32に搭載するようにしてもよい。また、タッチパネル7側の仕様により、当初から座標情報が1点に絞られて出力される(例えば、押圧領域の左端のX座標と右端のX座標との中間値が出力される)ような場合には、上記の座標補正は不要である。
【0065】
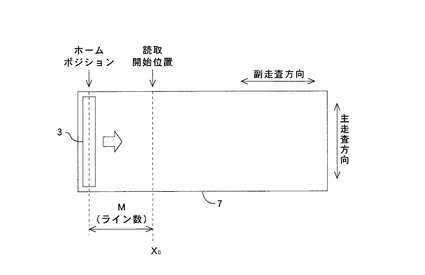
開始位置算出部42は、図16に示すように、初期位置検出部41の初期位置データX0に基づいて、読取ユニット3のホームポジションから読取開始位置までの移動量Mを算出するとともに、その移動量を示す初期駆動値MVを出力する。開始位置算出部42には、CCD12のライン幅LWがタッチパネル7のX座標の何目盛り分に当たるかの情報が予め記憶される。
【0066】
現在位置検出部43は、X座標データ生成部32のX座標データXDに基づいて、現在の指6の押圧位置を示す現位置X座標データXiを出力する。現在位置検出部43においても、図15に示す初期位置検出部41の場合と同様、X座標データXD1又はXD2から指6の内側に向かう方向へ所定量rだけ減算して座標値を補正し、この補正した値を指6の押圧位置と認定して現位置X座標データXiとする。尚、現位置X座標データXiの検出周期は、一定の周期で、かつ、CCD12の画像信号出力周期VT(図18参照)よりも短い周期に設定される。
【0067】
移動量検出部44は、現在位置検出部43の現位置X座標データXiに基づいて、指6の押圧位置の移動量がCCD12のライン幅LW(図12参照)に達しか否かを判定し、移動検出信号DSを出力する。
【0068】
図17に示すように、移動量検出部44は、後述の移動検出信号DSを立ち上げたときのX座標データXmを保持し、保持したX座標データXmを今回の現位置X座標データXiから減算して指6の移動量(Xi−Xm)を求める。そして、求めた移動量(Xi−Xm)が、CCD12のライン幅LWに相当する長さに達しているか否かを判定し、達していれば、図18に示すように、移動検出信号DSをHiレベルに立ち上げる。尚、移動量検出部44においても、CCD12のライン幅LWがタッチパネル7のX座標の何目盛り分に当たるかが予め記憶される。
【0069】
また、移動量検出部44は、指6の移動方向(副走査方向における正転であるか、逆転であるか)を判別し、移動方向を示す方向信号RDを出力する。この方向信号RDは、指6の移動方向が正転方向であればHiレベルとなり、指6の移動方向が逆転方向であればLowレベルとなる。指6の移動方向の判別は、上述の求めた移動量(Xi−Xm)を用いて行うことができ、移動量(Xi−Xm)が正の値であれば正転と判定し、負の値であれば逆転と判定する。
【0070】
反転検出部45は、指6の移動方向が反転した場合の動作を制御するために備えられる。反転検出部45では、移動量検出部44の方向信号RD及び移動量(Xi−Xm)に基づき、指6の逆転移動量を示す値(逆方向への移動量をライン数換算した値)Lを管理するとともに、この逆転移動量Lに基づいて反転復帰信号BSを生成する。
【0071】
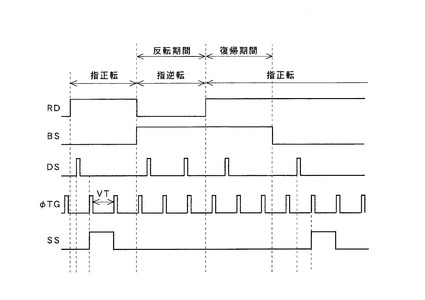
反転復帰信号BSは、指6が逆方向に移動している期間(反転期間)、及び、逆方向に移動した状態から再反転して反転開始位置(指6の転動方向が正転から逆転に変化した位置)まで戻ってくる期間(復帰期間)を示す信号であり、図18に示すように、指6が正転から逆転への反転を開始してから元の位置に戻ってくるまでの間、Hiレベルに立ち上がる。
【0072】
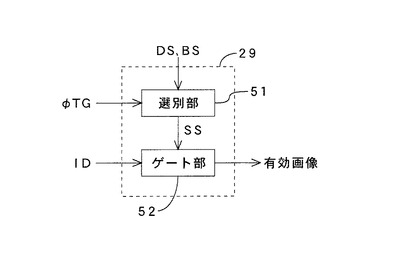
図13に戻り、画像選別手段29は、図19に示すように、移動検出手段28からの移動検出信号DS、反転復帰信号BS及びCCDドライバ21からの画像出力信号φTGを入力し、画像選択信号SSを出力する選別部51と、選別部51の画像選択信号SSに基づき、画像データIDを、有効な画像データと、そうでない画像データとに振り分けるゲート部52とを備える。
【0073】
選別部51は、図18に示すように、反転復帰信号BSがLowレベルとなる期間において、移動検出信号DS及び画像出力信号φTGを参照し、移動検出信号DSがHiレベルに立ち上がった直後の画像出力信号φTGの立ち上がりに応答して、画像選択信号SSをHiレベルに立ち上げ、それをCCD12の画像信号出力周期VTの1周期分の期間にわたって保持する。ここで、画像選択信号SSのHiレベル期間は、画像データIDを有効画像化する期間に対応し、画像選択信号SSのLowレベル期間は、画像データIDを無効画像化する期間に対応する。
【0074】
一方、反転復帰信号BSがHiレベルとなる期間では、移動検出信号DS及び画像出力信号φTGに関係なく、画像選択信号SSをLowレベルに保持する。
【0075】
ゲート部52は、画像選択信号SSがHiレベルの期間において、画像信号処理部23から出力される画像データIDを有効画像として後段のメモリ24に出力し、一方、画像選択信号SSがLowレベルの期間において、画像データIDを無効な画像であるとして破棄する。尚、ゲート部52は、例えば、AND回路によって構成することができる。
【0076】
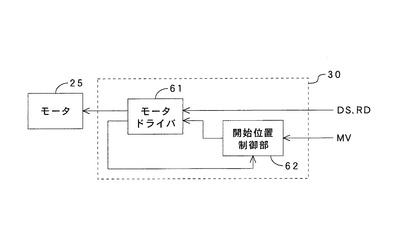
図13に戻り、モータ制御手段30は、図20に示すように、移動検出手段28からの移動検出信号DSに応答してモータ25を駆動するモータドライバ61と、CCD12(読取ユニット3)の読取開始位置までの移動を制御する開始位置制御部62とを備える。
【0077】
モータドライバ61は、移動量検出部44の移動検出信号DSがHiレベルに立ち上がったときに、モータ25を駆動し、CCD12(読取ユニット3)をライン幅LWだけ副走査方向に移動させる。また、モータドライバ61は、移動量検出部44の方向信号RDが正方向を示すときに、モータ25を正回転(CCD12を正方向移動させる回転方向)させ、方向信号RDが逆方向を示すときに、モータ25を逆回転させる。
【0078】
開始位置制御部62は、CCD12をホームポジションから読取開始位置まで移動させる際(図16参照)に使用するものであり、移動検出手段28からの初期駆動値MV(図14参照)とモータ駆動量(CCD12の移動ライン数)を対比し、両者が合致するまで、モータ25を駆動させるようにモータドライバ61に指示を与える。
【0079】
尚、図13〜図20を参照して説明した上記の構成は、必ずしも、その全てをハードウェアによって構成する必要はなく、一部をソフトウェア化して構成してもよいのは勿論のことである。
【0080】
次に、上記構成を有する画像読取装置10の動作について説明する。ここでは、先ず、指紋読取操作に際しての動作手順について、図21〜図24を中心に参照しながら説明する。
【0081】
外部から読取コマンドを受信すると、図21に示すように、先ず、反転検出部45(図14参照)において、逆転移動量(ライン数)Lを初期化し、L=0とする(ステップS11)。また、選別部51(図19参照)において、画像選択信号SSをLowレベルに立ち下げ、画像データIDの無効化設定を行う(ステップS12)。
【0082】
次いで、CCD12の駆動を開始し(ステップS13)、タッチパネル7上に指6が載置されるのを待機する(ステップS14)。そして、指6がタッチパネル7上に載置され、タッチ検出部31(図14参照)において、その旨が検出されると、これに応答し、初期位置検出部41によって、指6の初期位置を示す初期位置データX0を生成する(ステップS15)。
【0083】
次に、開始位置算出部42(図14参照)によって、読取ユニット3のホームポジションから読取開始位置までの移動量M(図16参照)を算出するとともに、開始位置制御部62(図20参照)によって、読取ユニット3を読取開始位置まで移動させる(ステップS16)。
【0084】
尚、図22(a)に示すように、例えば、読取ユニット3の中央部を位置基準Pとして読取ユニット3の位置制御を行うような場合、ミラー13及び光学レンズ14の配置位置にもよるが、ホームポジションから読取開始位置へ読取ユニット3を移動させた際に、ミラー13及び光学レンズ14の光軸16と指6の初期位置X0との間にズレを生じさせた状態で読取ユニット3が位置決めされることがある。
【0085】
このような場合には、図22(b)に示すように、読取ユニット3を読取開始位置まで移動させた後、光軸16と初期位置X0のズレ量sの分だけ読取ユニット3を逆方向に微小移動させて読取ユニット3の位置を補正するか、或いは、図16の移動量Mを求めた後に移動量Mからズレ量sを減算し(M−s)、これを基にして初期駆動値MVを求めるようにすればよい。
【0086】
但し、例えば、読取ユニットの位置基準Pを光軸16と揃えて設定する場合のように、当初からズレが生じないような構成を採る場合は、上記の補正処理は不要である。
【0087】
図21に戻り、被検者が指6の転動を開始すると(ステップS17)、現在位置検出部43(図14参照)によって、現在の指6の押圧位置を示す現位置X座標データXiを生成する(ステップS18)。尚、現位置X座標データXiの検出周期は、前述のように、一定の周期で、かつ、CCD12の画像信号出力周期(画像信号ISの出力周期)VT(図18参照)よりも短い周期に設定される。
【0088】
次いで、移動量検出部44(図14参照)によって、指6の移動量(Xi−Xm)を算出するとともに、指6の移動方向を示す方向信号RDを生成する(ステップS19)。次に、指6の移動方向が正転方向であるか否かを判別し(ステップS20)、正転である場合には(ステップS20:Y)、指6の移動量(Xi−Xm)がCCD12のライン幅LW(図12参照)に達しているか否かを判別する(ステップS21)。
【0089】
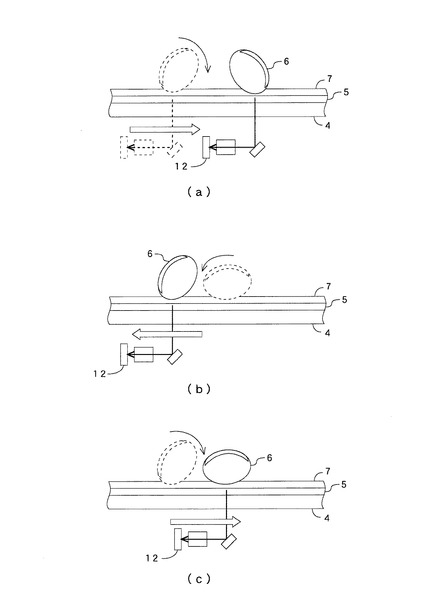
そして、指6の移動量(Xi−Xm)がライン幅LW以上である場合(移動検出信号DSがHiレベルに立ち上がった場合)には(ステップS21:Y)、指6の押圧位置が正転方向にライン幅LW以上移動したことを示すため、モータドライバ61(図20参照)によって、モータ25を駆動し、ライン幅LWに相当する距離だけ、CCD12(読取ユニット3)を正転方向へ移動させる(ステップS22)。こうして、図24(a)に示すように、指6の動きに追従させながら、CCD12を1ラインずつ正方向移動させる。
【0090】
尚、図21においては、ステップS22の次段にステップS23を設けているが、これについては、便宜上、説明を省略して後述することにする。
【0091】
ステップS22の処理と併行し、選別部51において、画像選択信号SSをHiレベルに立ち上げ、画像信号処理部23から出力される画像データIDを有効化する(ステップS24)。画像選択信号SSの立ち上げは、前述のように、移動検出信号DSがHiレベルに立ち上がった直後の画像出力信号φTGの立ち上がりに応答して行われ、また、画像選択信号SSのHiレベル期間は、CCD12の画像信号出力周期VTの1周期分の期間にわたって保持される(図18参照)。これにより、1ライン分の画像データIDが有効化され、有効化された画像データIDは、ゲート部52(図19参照)を通じてメモリ24に出力される。
【0092】
一方、指6の移動量(Xi−Xm)がライン幅LW未満である場合(移動検出信号DSが立ち上がっていない場合)には(ステップS21:N)、選別部51において、画像データIDを無効化した状態(画像選択信号SSをLowレベルに立ち下げた状態)を維持する(ステップS25)。
【0093】
これらに対し、指6の移動方向が逆転方向である場合には(ステップS20:N)、選別部51において、画像データIDを無効化した状態を維持するとともに(ステップS26)、指6の移動量(Xi−Xm)の絶対値がライン幅LW以上であるか否かを判別する(ステップS27)。
【0094】
指6の移動量(Xi−Xm)の絶対値がライン幅LWよりも小さい場合には(ステップS27:N)、ステップS18に移行し、次の現位置X座標データXiの検出タイミングが到来するのに応じて、ステップS18以降の処理を実行する。
【0095】
一方、指6の移動量(Xi−Xm)の絶対値がライン幅LW以上の場合には(ステップS27:Y)、指6の押圧位置が逆転方向にライン幅LW以上移動したことを示すため、反転検出部45において、逆転移動量Lに1ライン分を加算する(ステップS28)。また、モータ25を逆回転させ、CCD12をライン幅LWに相当する距離だけ、逆転方向へ移動させる(ステップS29)。
【0096】
その後、次の現位置X座標データXiの検出タイミングが到来するのに応じて、ステップS18の処理を実行し、ステップS20において、指6の移動方向が正転方向であるか否かを判別する。この時点で、指6の逆転方向への移動が継続されていれば(ステップS20:N)、再度、ステップS26に処理が移行し、ステップS26〜ステップS29の処理を繰り返す。このため、移動量(Xi−Xm)の絶対値がライン幅LW以上となる都度、逆転移動量Lに「1」が累加算されるとともに、図24(b)に示すように、指6の動きに追従してCCD12が1ラインずつ逆方向移動される。
【0097】
これに対し、ステップS20の処理に際して、指6の移動方向が正転方向に変化していれば(ステップS20:Y)、ステップS21に処理が移行し、指6の移動量(Xi−Xm)がライン幅LW以上であるか否かを判別する。そして、指6の正転方向への移動量(反転開始位置に戻る方向への移動量)がライン幅LW以上である場合には(ステップS21:Y)、モータ25を正回転させ、CCD12を1ライン分だけ正転方向に戻す(ステップS22)。
【0098】
次いで、反転検出部45の逆転移動量Lが「0」であるか否かを判別する(ステップS23)。この処理は、CCD12が指6の反転開始位置まで戻ったかを確認するためのものであり、逆転移動量L=0でない場合(ステップS23:N)、すなわち、反転開始位置まで戻りきっていない場合には、画像データIDの無効化を維持しつつ(ステップS30)、反転検出部45が保持する逆転移動量Lから「1」を減算する(ステップS31)。尚、逆転移動量Lから「1」を減算するのは、ステップS22でCCD12を1ライン分だけ正転方向に戻したことに対応するものである。
【0099】
以後、逆転移動量Lが「0」になるまで上記の処理を繰り返し、図24(c)に示すように、指6が反転開始位置に戻っていくのに追従させながら、CCD12を1ラインずつ正転方向へ移動させていく。そして、逆転移動量L=0、すなわち、指6の反転開始位置までCCD12が戻りきっていれば(ステップS23:Y)、ステップS24に処理を移行し、上記と同様にして、画像データIDを適宜有効化しながら、CCD12を1ラインずつ断続的に正方向移動させる。
【0100】
その後、タッチパネル7から指6が離れるか、或いは、画像データIDの取得ライン数が有効画像指定ライン数に達するまで(ステップS32、S33)、ステップS18〜ステップS31の処理を繰り返し、指6の一方の側面から他方の側面までの回転指紋像を1ラインずつ取得する。尚、有効画像指定ライン数とは、万人の回転指紋像の大凡の大きさを見込んで予め設定するものであり、見込んだ回転指紋像の大きさをCCD12のライン数に換算して数値化したものである。
【0101】
そして、タッチパネル7から指6が離れるか、或いは、画像データIDの取得ライン数が有効画像指定ライン数に達していれば(ステップS32:Y、S23:Y)、読取操作を終了し、図23に示すように、CCD12をホームポジションに戻すとともに、CCD12の駆動を停止する(ステップS34、S35)。
【0102】
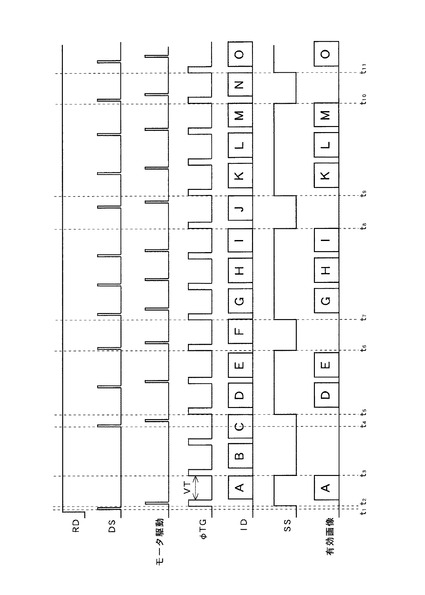
次に、図21〜図24に示す手順の下での画像読取装置1の動作例について説明する。ここでは、先ず、タッチパネル7上に載置した指6を正転方向にのみ転動させた場合について、図25を中心に参照しながら説明する。尚、図25において、図示を省略しているが、反転復帰信号BSは、Lowレベルに立ち下がった状態で維持されている。
【0103】
当初、指6の転動速度が遅かった場合、タイミングt1で移動検出信号DSが立ち上がってから、しばらく移動検出信号DSが立ち上がらない状態が続く。この場合、先ず、移動検出信号DSが立ち上がった直後の画像出力信号φTGの立ち上がり(タイミングt2)に応答して、画像選択信号SSが立ち上がり、画像データID(A)を有効化する。また、移動検出信号DSの立ち上がり(タイミングt1)に応答して、モータ駆動信号が立ち上がり、CCD12が正転方向に1ライン分だけ移動される。
【0104】
そして、CCD12の画像信号出力周期VTが経過する(次の画像出力信号φTGが立ち上がる)のに応じて、画像選択信号SSが立ち下がり、画像データIDを無効化するように遷移する(タイミングt3)。その後、画像選択信号SSの次の立ち上がり(タイミングt5)まで、画像データIDの無効化が継続され、その間に出力される画像データID(B)、ID(C)は全て破棄される。
【0105】
タイミングt4において、移動検出信号DSの2度目の立ち上がりがあると、上記の場合と同様にして、画像データID(D)の有効化及びモータ駆動が行われる。この際、指6の転動速度が変化して速くなっていると、タイミングt4以降、短い周期で移動検出信号DSが立ち上がるようになる。それに応答して、画像データIDを有効化する頻度が上がり、画像データID(D)の次の画像データID(E)も有効化される。
【0106】
以後、指6の進み具合に応じて、画像データIDの有効化/無効化を選別するとともに(タイミングt6〜t11)、適宜、CCD12を正方向へ断続的に移動させつつ、読取操作を進める。そして、読取操作が終了した時点で、有効化した画像データ(メモリ24に記憶した画像データ)ID(A)、ID(D)、ID(E)、ID(G)〜ID(I)、ID(K)〜(M)及びID(O)を繋ぎ合わせ、1枚の指紋像を取得する。尚、画像データIDの繋ぎ合わせは、いわゆる画像合成処理のような高度なデータ編集は不要であり、メモリ24に書き込んだ画像データIDを書き込み順序に従って読み出すだけでよい。
【0107】
このように、第2の実施形態においては、CCD12から1ライン単位で定期的に画像信号ISを出力させつつ、指6の押圧位置の移動量を検出して、指6の転動に追従させてCCD12を移動させるように構成し、その上で、指6の押圧位置の移動量がライン幅LWに達する都度、画像データIDを選択的に有効化するようにしたため、指紋像の重複(画像の重複)を回避しながら、1ラインずつ順番に指紋像を得ることが可能になる。そして、そのようにして得たライン単位の複数の画像データIDを繋ぎ合わせて回転指紋の全体像を生成するため、フレーム画像(エリア画像)を合成する場合に比べて画像の繋ぎ目に歪みが生じ難く、従来のような歪み補正処理を用いずとも、歪みの少ない良質な画像を取得することが可能になる。
【0108】
次に、タッチパネル7上に載置した指6の転動方向を反転させた場合について、図26を中心に参照しながら説明する。
【0109】
タイミングt21〜t24において、指6が正方向に転動されている間は、方向信号RDがHiレベルに立ち上がり、図25のタイミングt1〜t3の場合と同様に動作する。
【0110】
そして、タイミングt24において、指6の転動方向が反転し、指6の押圧位置が逆方向に移動し始めると、反転復帰信号BSがHiレベルに立ち上がる。反転復帰信号BSは、指6が再反転して反転開始位置(指6の転動方向が正転から逆転に変化した位置)に戻ってくるタイミングt30まで、Hiレベルの状態が維持される。このため、タイミングt24〜t30の間に出力される画像データID(C)〜ID(H)は、全て無効化され、破棄される。
【0111】
また、タイミングt25において、指6の逆方向への移動量がライン幅LWに達すると、モータ駆動信号が立ち上がり(タイミングt26)、モータ25が逆回転駆動され、CCD12が逆方向に移動される。
【0112】
その後、タイミングt27において、指6の転動方向が再反転して指6の押圧位置が正方向に移動し始めると、方向信号RDがHiレベルに立ち上がる。そして、タイミングt28において、指6の正方向への移動量がライン幅LWに達すると、モータ駆動信号が立ち上がり(タイミングt29)、モータ25が正回転駆動されてCCD12が正方向に移動される。
【0113】
指6が反転開始位置まで戻ってきたタイミングt30以後は、図25の場合と同様、指6の進み具合に応じて、画像データIDの有効化/無効化を選別するとともに、適宜、CCD12を正方向に移動させつつ、読取操作を進める。
【0114】
このように、第2の実施形態においては、指6の転動方向が反転するタイミング、及び、指6が再反転して反転開始位置に戻ってくるタイミングを検出し、それらの間において、画像データIDを全て無効化するようにしたため、被検者が指6を正しく転動させなかった期間の画像データIDを適宜廃棄することができる。このため、かかる期間の画像データIDが繋ぎ合わせ後の画像に混入することがなく、繋ぎ合わせ後の画像が乱れるのを回避することが可能になる。これにより、読み取りの途中で被検者が指6の転動方向を変えた場合でも、再度の読み取りを強いることがなく、利便性を向上させることが可能になる。
【0115】
尚、第2の実施形態においては、指6の転動方向が反転した場合に、その動きに追従してCCD12を移動させるように構成したが(図24(b)参照)、図27(a)〜(c)に示すように、指6が逆方向に転動しても、CCD12を逆方向へ移動させずに指6の反転開始位置で停止させ、その後、指6が再反転して反転開始位置まで戻ってくるまで待機させるようにしてもよい。そして、指6が反転開始位置まで戻ってきた後は、図25の場合と同様に、指6の押圧位置の移動に追従してCCD12を正方向へ移動させる。
【0116】
さらに、第2の実施形態においては、指6の押圧位置の移動量がライン幅LWに達したか否かを判定するにあたり、移動検出信号DSを立ち上げたときのX座標データXmを保持し、これを今回の現位置X座標データXiから減算して移動量(Xi−Xm)を求め、求めた移動量(Xi−Xm)がライン幅LW以上になるかを判定するように構成したが、図28に示すように、検出周期DT毎のX座標データXi1〜Xi6を累加算して移動量Xaddを求めるとともに、その移動量Xaddがライン幅LWに相当する長さ以上になるか否かを判定するようにしてもよい。この場合、移動量Xaddは、移動検出信号DSが立ち上がる都度、「0」にリセットされる。
【0117】
また、第2の実施形態においては、指6の押圧位置を認定するにあたり、一律に所定量rを加減算して押圧位置を認定するように構成したが(図15参照)、例えば、初期位置検出部41、現在位置検出部43において、XD1+{(XD2−XD1)/2}又はXD2−{(XD2−XD1)/2}の算出処理を行い、常時、X座標データXD1とX座標データXD2の中央座標を求め、これを押圧位置として認定するようにしてもよい。
【0118】
このように、第2の実施形態によれば、拡散板を用いることにより、被写体を転動させた場合であっても指紋画像を鮮鋭化させることができる。また、指6の押圧位置の移動量がライン幅LWに達する都度、画像データIDを選択的に有効化するように構成したため、従来のような歪み補正処理を用いずとも、歪みの少ない良質な画像を取得することができる。このため、信号処理用の回路やソフトウェアの複雑化を解消することができ、装置の低価格化を図ることが可能になる。
【0119】
以上、本発明の第1及び第2の実施形態について説明したが、本発明は、上記構成に限定されるものではなく、特許請求の範囲に記載された発明の範囲内で種々の変更が可能である。例えば、上記第1及び第2の実施形態においては、画像信号ISを出力するラインセンサとしてCCDを例示したが、必ずしもCCDを用いる必要はなく、例えば、CMOS(Complementary Metal Oxide Semiconductor)センサ等の他の撮像素子を用いてもよい。
【0120】
また、上記第1及び第2の実施形態においては、本発明にかかる画像読取装置を指紋の読み取りに用いる場合を例示したが、読み取りの対象物(被写体)は、指に限られるものではなく、如何なるものであってもよい。
【0121】
さらに、上記第2の実施形態においては、タッチパネル7上を転動させて表面像を読み取るものであれば、広く適用することができ、例えば、飲料用や食料用の缶の表面検査等にも応用することができる。尚、被写体は、円筒状の物体であることが好ましいが、多少歪な形状であってもタッチパネル7上で転動し得るものであれば問題ない。
【符号の説明】
【0122】
1、10 画像読取装置
2 スキャナ筐体
3 読取ユニット
4 プラテンガラス
5 拡散板
6 指
7 タッチパネル
11 光源
12 CCD
13 ミラー
14 光学レンズ
15 ユニット筐体
16 光軸
21 CCDドライバ
22 コマンド受信部
23 画像信号処理部
24 メモリ
25 モータ
26 モータドライバ
27 座標検出手段
28 移動検出手段
29 画像選別手段
30 モータ制御手段
31 タッチ検出部
32 X座標データ生成部
41 初期位置検出部
42 開始位置算出部
43 現在位置検出部
44 移動量検出部
45 反転検出部
51 選別部
52 ゲート部
61 モータドライバ
62 開始位置制御部
【技術分野】
【0001】
本発明は、検知台の裏面側から被写体を撮影し、被写体の表面像を読み取る画像読取装置に関し、特に、鮮鋭な画像を得るのに適した装置に関する。
【背景技術】
【0002】
従来、個人を特定する方法の1つとして、指紋を利用するものがあり、この方法では、指紋の画像を装置に入力し、その入力された画像と予め登録された指紋の画像とを照合するのが一般的である。指紋画像の入力方法としては、例えば、被写体である指を検知台に載せた状態で検知台の裏面側から光を照射し、CCD(Charge Coupled Devices)等の二次元センサにより指を撮影する方法が用いられる。
【0003】
上述の方法では、指に照射された光の反射光を二次元センサで受光し、受光した光の強弱に応じて指紋の凹凸を画像化するが、二次元センサで受光する光が微弱であるため、指紋の凹凸を鮮明に取得することができないという問題があった。
【0004】
そこで、最近では、検知台に様々な光学部材を用いて、指の凹凸に応じてコントラストの差を大きくすることにより、指紋の凹凸を鮮明にする装置が提案されている。例えば、引用文献1、2及び3では、各々プリズムレンズ、オプティカルファイバプレート及び導光板を検知台に用いて指紋画像を取得する装置が記載されている。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2003−50993号公報
【特許文献2】特許第2579375号公報
【特許文献3】特開平10−143663号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかし、引用文献1及び2に記載の装置では、プリズムレンズやオプティカルファイバプレートを用いるため、これらの光学部材を配置するスペースを装置の内部に確保する必要があり、装置全体を小型化することが困難であるという問題があった。また、プリズムレンズやオプティカルファイバプレートは、特殊な光学部材であるため、装置のコストが増大するという問題があった。
【0007】
また、引用文献3に記載の装置では、検知台に導光板を用いるが、十分なコントラストを得ることができないため、指紋画像を鮮鋭化させることが困難であるという問題があった。
【0008】
さらに、引用文献1〜3の装置においては、受光部として二次元センサを用いているため、1枚の指紋画像を取得する際に複数の画像を合成する必要がある。この場合、合成する画像間の繋ぎ目に歪みが生じるため、画像を合成する際に歪みを補正したり、合成後の画像から歪みを取り除く等の画像処理が必要になる。従って、装置には、このような画像処理を行うための構成を予め備えておく必要があるため、画像処理用の回路やソフトウェアが複雑化し、装置の高額化を招くという問題があった。
【0009】
そこで、本発明は、上記従来の技術における問題点に鑑みてなされたものであって、取得する画像を鮮鋭化させることができるとともに、装置を小型化することができ、低価格化を図ることが可能な画像読取装置を提供することを目的とする。
【課題を解決するための手段】
【0010】
上記目的を達成するため、本発明は、指紋等の被写体を読み取る画像読取装置において、光を透過する板状部材により構成され、前記被写体を載置する被写体載置部と、前記被写体に対して光を照射する光源と、前記被写体を撮影し、画像信号を出力する撮像手段とを含む画像読取ユニットとを備え、前記画像読取ユニットは、前記被写体載置部の前記被写体が接する面の裏側に位置し、前記撮像手段に備えるラインセンサで前記被写体の受光面の1ラインを主走査として読み取る手段と、前記主走査に対して垂直な副走査方向に移動する搬送手段を有し、前記被写体載置部は、光を拡散させる拡散部材を有することを特徴とする。
【0011】
そして、本発明によれば、光源からの光を拡散部材を用いて拡散させることにより、コントラストが鮮明な画像を取得するため、画像を鮮鋭化させることが可能になる。また、特殊な光学部材を使用することなく拡散部材を用いるため、装置を小型化することができるとともに、装置の低価格化を図ることが可能になる。
【0012】
また、取得したライン毎の画像データを単に繋ぎ合わせて画像を取得することができるため、高度な画像合成処理を行う必要がなく、信号処理用の回路やソフトウェアの複雑化を解消することができ、装置の低価格化を図ることが可能になる。
【0013】
上記画像読取装置において、前記拡散部材は、前記被写体が載置される面に拡散面を有することができる。これにより、拡散部材によって拡散された光を被写体に対して効率的に照射することができるため、画像をより鮮鋭化させることが可能になる。
【0014】
上記画像読取装置において、前記拡散部材は、入射光を前記副走査方向に拡散させることができる。これにより、拡散部材によって拡散された光を被写体に対して効率的に照射することができるため、画像をより鮮鋭化させることが可能になる。
【0015】
上記画像読取装置において、前記光源は、前記拡散部材の拡散する角度に応じて前記照射角度を決定することができる。
【0016】
上記画像読取装置において、前記被写体が前記被写体載置部と接する位置において光の入射角度と等しい反射角度の光を前記ラインセンサが受光するように、前記光源及び前記ラインセンサを配置することができる。これにより、光源から被写体に対して照射された光の反射波を効率的にラインセンサが受光できるため、画像をより鮮鋭化させることが可能になる。
【0017】
上記画像読取装置において、前記拡散部材上に貼着され、前記被写体によって押圧される押圧位置を前記副走査方向の座標情報で出力するタッチパネルと、前記タッチパネルから出力される座標情報に基づき、該タッチパネル上での前記被写体の押圧位置の前記副走査方向への移動量を検出する検出手段とをさらに備え、前記搬送手段は、前記検出手段で検出される移動量に基づき、前記被写体の転動に追従させて前記読取ユニットを前記副走査方向に移動させることができる。これにより、被写体を転動させた場合であっても画像を鮮鋭化させることが可能になる。
【発明の効果】
【0018】
以上のように、本発明によれば、取得する画像を鮮鋭化させることができるとともに、装置を小型化することができ、低価格化を図ることが可能になる。
【図面の簡単な説明】
【0019】
【図1】本発明にかかる画像読取装置の第1の実施形態を示す外観図であり、(a)は斜視図、(b)は上面図である。
【図2】図1の画像読取装置の断面図である。
【図3】図2のCCDの平面図(図2のA線矢視方向で見た図)である。
【図4】図1の画像読取装置の機能構成の一例を示すブロック図である。
【図5】図1の画像読取装置の動作を説明するためのフローチャートである。
【図6】拡散板を用いた場合の指紋画像の鮮鋭化について説明するための略線図であり、(a)は指紋の山部、(b)は指紋の谷部に光を照射して画像を取得する場合の図である。
【図7】ミラーの配置について説明するための略線図である。
【図8】入射角及び反射角を等しくした場合の 指紋画像の鮮鋭化について説明するための略線図であり、(a)は指紋の山部、(b)は指紋の谷部に光を照射して画像を取得する場合の図である。
【図9】取得した指紋画像の一例を示す略線図であり、(a)は拡散板5を用いた場合の指紋画像、(b)は拡散板5を用いない場合の指紋画像である。
【図10】本発明にかかる画像読取装置の第2の実施形態を示す外観図であり、(a)は斜視図、(b)は上面図である。
【図11】図10の画像読取装置の断面図である。
【図12】図11のCCDの平面図(図11のA線矢視方向で見た図)である。
【図13】図10の画像読取装置の機能構成の一例を示すブロック図である。
【図14】図13の座標検出手段及び移動検出手段の構成の一例を示すブロック図である。
【図15】押圧位置の検出方法を示す略線図である。
【図16】読取開始位置までの移動量の算出方法を示す略線図である。
【図17】指の移動量の検出方法を示す略線図である。
【図18】画像データの有効化/無効化の選別方法を示すタイミング図である。
【図19】図10の画像選別手段の構成の一例を示すブロック図である。
【図20】図10のモータ制御手段の構成の一例を示すブロック図である。
【図21】図10の画像読取装置の動作手順を示すメインフローチャートである。
【図22】読取ユニットの位置補正を示す略線図であり、(a)は補正前、(b)は補正後の状態を示す図である。
【図23】図21の読取終了処理の動作手順を示すサブフローチャートである。
【図24】指の転動とCCDの移動との関係を示す略線図である。
【図25】図10の画像読取装置の動作を示すタイミング図であり、タッチパネル上に載置した指を正転方向にのみ転動させた場合の動作を示す図である。
【図26】図10の画像読取装置の動作を示すタイミング図であり、タッチパネル上に載置した指の転動方向を反転させた場合の動作を示す図である。
【図27】指の反転転動とCCDの移動との関係を示す略線図である。
【図28】指の押圧位置の移動量がライン幅に達したか否かを判定する方法の他の例を示す略線図である。
【発明を実施するための形態】
【0020】
次に、本発明を実施するための形態について、図面を参照しながら詳細に説明する。
【0021】
まず、本発明の第1の実施形態について説明する。ここでは、本発明にかかる画像読取装置を、指紋画像を読み取る画像読取装置に適用した場合を例にとって説明する。
【0022】
図1は、本発明にかかる画像読取装置の第1の実施形態を示し、図1(a)に示すように、この画像読取装置1は、スキャナ筐体2と、スキャナ筐体2内に収容され、モータ駆動により副走査方向に移動可能に構成された読取ユニット3と、スキャナ筐体2上に配置された透明のプラテンガラス4と、プラテンガラス4上に配置された拡散板5とから構成される。尚、図示を省略しているが、スキャナ筐体2の内側には、スライドレールが搭載され、また、読取ユニット3には、スライドレールと噛合する歯車、及び歯車を回転させるモータが搭載される。
【0023】
拡散板5は、図1(b)に示すように、例えば、上面視長方形状に形成され、図2に示すように、被写体である指6を載置する載置台として使用される。拡散板5は、例えば、ガラスや樹脂等で形成された基材の一方の面(拡散面)を擦りガラス(砂面)状とする処理が施され、他方の面から入射する光を拡散させるものである。
【0024】
拡散板5は、指6が載置される面が拡散面となり、後述する光源11からの光が入射される面が非拡散面となるように配置されるとともに、入射する光が読取ユニット3の副走査方向に広く、主走査方向に狭く拡散するように配置される。このように拡散板5を配置することにより、入射する光の拡散範囲(領域)は、例えば、読取ユニット3の副走査方向を長軸とする楕円状となり、拡散された光を指6に対して効率的に照射することができる。尚、拡散板5としては、この例に限られず、例えばシート状やフィルム状のものを使用することができる。
【0025】
プラテンガラス4は、拡散板5上に指6が載置されるときの支持台として機能するものであり、例えば、拡散板5よりも強度が高い透明ガラスによって構成される。
【0026】
読取ユニット3は、図2に示すように、拡散板5上に載置された指6に光を照射する光源11と、画像を撮影するCCD(Charge Coupled Devices)12と、指6の指紋像をCCD12の受光面に導くミラー13及び光学レンズ14と、これら光源11、CCD12、ミラー13及び光学レンズ14を収容するユニット筐体15から構成される。
【0027】
光源11による光の照射角度は、拡散板5の拡散角に応じて決定される。尚、光源11による光の照射角度は、これに限られず、例えば実験により決定してもよい。CCD12は、1ライン単位で画像を撮影し、受光した光を画像信号に変換して出力する1次元CCD(ラインセンサ)であり、図3に示すように、主走査方向に延びるように配置される。ミラー13は、被写体によって反射した光を受光し、光学レンズ14に対して反射する。ミラー13の受光角度は、例えば実験により決定することができる。
【0028】
図4は、画像読取装置1の機能構成を示すブロック図である。同図に示すように、画像読取装置1は、光源11と、CCD12と、画像出力信号φTGを供給してCCD12を駆動し、CCD12から定期的に画像信号(アナログ信号)ISを出力させるCCDドライバ21と、外部からの読取コマンド(読取指令)に応じて、CCDドライバ21に指示を与えるとともに、光源11を点灯させるコマンド受信部22と、CCD12から出力される画像信号ISに対してA/D(Analog/Digital)変換等の所定の信号処理を施す画像信号処理部23と、画像信号処理部23から出力される画像データ(デジタル信号)IDを記憶するメモリ24と、読取ユニット3(図1参照)を副走査方向に移動させるステッピングモータ(以下、「モータ」という)25と、コマンド受信部22からの命令に基づきモータ25を制御するモータドライバ26等から構成される。尚、これらの光源11〜モータドライバ26は、いずれも図1の読取ユニット3内に搭載される。
【0029】
次に、上記構成を有する画像読取装置1の動作について説明する。図5は、画像読取装置1の動作を説明するためのフローチャートである。
【0030】
まず、画像読取装置1は、外部から読取コマンドを受信すると(ステップS1)、CCD12の駆動を開始し、CCD12による撮影が開始される(ステップS2)。
【0031】
次に、読取ユニット3を読取開始位置であるホームポジションから読取終了位置まで移動させ(ステップS3)、CCD12による撮影がライン毎に行われる。ライン毎に撮影することにより得られた画像信号ISは、画像信号処理部23に供給され、A/D変換等の所定の信号処理が施され、画像データIDとしてメモリ24に順次書き込まれて記憶される。
【0032】
次に、読取ユニット3が読取終了位置に到達したか否かが判断され(ステップS4)、読取ユニット3が読取終了位置に到達したと判断されると(ステップS4:Y)、読取操作を終了し、読取ユニット3をホームポジションに戻すとともに、CCD12の駆動を停止する(ステップS5、S6)。
【0033】
一方、ステップS4において、読取ユニット3が読取終了位置に到達していないと判断された場合には(ステップS4:N)、読取ユニット3が読取終了位置に到達するまでステップS4の処理が繰り返される。
【0034】
そして、読取操作が終了した時点で、メモリ24に記憶されたライン毎の画像データIDを繋ぎ合わせ、1枚の指紋画像を取得する。尚、画像データIDの繋ぎ合わせは、いわゆる画像合成処理のような、高度なデータ編集は不要であり、メモリ24に書き込んだ画像データIDを書き込み順序に従って読み出すだけでよい。
【0035】
ここで、拡散板5を用いた場合の指紋画像の鮮鋭化について説明する。指6を拡散板5上に載置した場合、拡散板5には、指紋の山部のみが接触し、谷部は接触しない。このような状態で拡散板5の裏面側から光を照射すると、指6による反射光の光量は、指紋の山部と谷部とで異なる。そこで、この第1の実施形態では、指6による反射光の光量に基づき、指紋の山部及び谷部によるコントラストを拡散板5を用いてより鮮明にすることで、指紋画像を鮮鋭化させる。
【0036】
図6は、拡散板5を用いた場合の指紋画像の鮮鋭化について説明する図であり、(a)は指紋の山部、(b)は指紋の谷部に光を照射して画像を取得する場合の図である。
【0037】
指紋の山部の画像を取得する場合は、図6(a)に示すように、光源11から出射された光がプラテンガラス4を透過し、拡散板5に入射される。このとき、拡散板5に入射された光は、拡散面で拡散方向に沿って拡散するが、指紋の山部が拡散板5に接しているため、指紋の山部に対して光を効率的に照射することができない。そのため、指紋の山部に照射される光は、光源11からの光に対して少ない状態で反射する。そして、指紋の山部で反射した光(反射光)は、拡散板5及びプラテンガラス4を透過してミラー13に入射し、光学レンズ14を介してCCD12の受光面で受光される。
【0038】
この場合、指紋の山部が拡散板5に接していることにより、光源11から照射され、拡散板5で拡散される光を効率的に指紋の山部に照射することができないため、ミラー13に入射する反射光は、光量が少なくなる。従って、CCD12で受光された反射光に基づき取得される画像は、暗い画像となる。
【0039】
一方、指紋の谷部の画像を取得する場合は、図6(b)に示すように、光源11から出射された光がプラテンガラス4を透過し、拡散板5の拡散面で拡散方向に沿って拡散する。このとき、指紋の谷部は、拡散板5に接触していないため、拡散された光(拡散光)は、拡散板5を透過して指紋の谷部に照射される。また、指紋の山部と山部との間の拡散板5に接していない副走査方向に広い範囲に照射される光源11からの光が拡散板5で拡散され、指紋の谷部に照射される。
【0040】
指紋の谷部に照射され、反射した光(反射光)は、拡散板5に入射し、拡散面でさらに拡散するとともに、プラテンガラス4を透過してミラー13に入射し、光学レンズ14を介してCCD12の受光面に受光される。また、指紋の谷部の拡散板5に接していない空間の読み取り位置周辺からの反射光についても、拡散板5の拡散面で効率的に拡散され、プラテンガラス4、ミラー13及び光学レンズ14を介してCCD12の受光面に受光される。
【0041】
この場合、指紋の谷部が拡散板5に直接接していないことにより、指紋の山部と山部との間の拡散板5に接していない広い範囲に照射される光源11からの光が拡散板5で拡散されて指紋の谷部に照射されるため、指紋の谷部に照射される光は、指紋の山部に対して照射される光よりも効率的に照射される。また、指紋の谷部からの反射光が拡散板5の拡散面で拡散される際に、指紋の谷部の拡散板5に接していない空間の読み取り位置周辺からの反射光についても拡散板5の拡散面で効率的に拡散される。そのため、ミラー13に入射する反射光は、指紋の山部からの反射光と比較して光量が多くなる。従って、CCD12で受光される光により取得される画像は、山部に光を照射した場合と比較して明るい画像となる。
【0042】
このように、ミラー13に入射する反射光の光量が指紋の山部及び谷部で異なるため、指紋の山部及び谷部のコントラストをより鮮明にすることができ、指紋画像を鮮鋭化させることができる。
【0043】
尚、例えば、拡散板5の拡散面が読取ユニット3側の面となるように、拡散板5を配置した場合には、プラテンガラス4と拡散板5との境界面で、光源11からの光が拡散されるため、指紋の山部及び谷部には、同様の光(拡散光)が照射されることになる。また、指紋の山部及び谷部からの反射光は、拡散板5の拡散面でさらに拡散されてミラー13に入射する。従って、CCD12で受光される指紋の山部及び谷部からの反射光の光量差は、拡散板5を用いない場合と同様の光量差となるため、指紋画像を鮮鋭化させることができない。
【0044】
また、上述のようにして指紋画像を取得する際には、例えば、図7に示すように、指6に対する入射角と反射角とが等しくなるように、ミラー13を配置してもよい。こうすることにより、光源11から指6に対して照射された光の反射波を効率的にミラー13に入射させることができるため、指紋画像を鮮鋭化させることができる。
【0045】
例えば、光源11から指6に対して照射される光と、拡散板5に対して直交する指6からの垂線とにより形成される角を入射角αとし、また、指6で反射され、ミラー13に入射される反射光と指6からの垂線とにより形成される角を反射角βとした場合、この入射角α及び反射角βが等しくなるように、ミラー13の位置及び角度を決定する。
【0046】
図8は、入射角α及び反射角βが等しくなるようにミラー13を配置した場合の図であり、(a)は指紋の山部、(b)は指紋の谷部に光を照射して画像を取得する場合の図である。尚、図8(a)及び(b)では、説明を容易とするため、拡散板5による拡散光のうち、直進する光のみを図示している。
【0047】
指紋の山部の画像を取得する場合は、図8(a)に示すように、光源11から出射された光がプラテンガラス4及び拡散板5を介して指紋の山部に所定の入射角で照射される。このとき、指紋の山部は、拡散板5に接触しているため、拡散板5に入射された光は、拡散面においてほとんど拡散せずにそのまま反射し、一部の反射光が入射角と等しい反射角で反射する(直接反射光)。指紋の山部からの直接反射光は、拡散板5及びプラテンガラス4を透過してミラー13に入射し、光学レンズ14を介してCCD12の受光面で受光される。
【0048】
この場合、ミラー13に入射する直接反射光は、指紋の山部からの反射光のうちの一部であるため、光源11からの光に対して光量が少なくなる。従って、CCD12で受光される光に基づき取得される画像は、暗い画像となる。
【0049】
一方、指紋の谷部の画像を取得する場合は、図8(b)に示すように、光源11から出射された光がプラテンガラス4及び拡散板5を透過し、所定の入射角で拡散板5の表面に到達する。このとき、指紋の谷部は、拡散板5に接触しておらず、指紋の谷部と拡散板5の表面との間に空間が存在するため、光源11からの光の一部が拡散板5を透過するが、残りの光は、入射角と等しい反射角で反射する(直接反射光)。拡散板5の表面で反射した直接反射光は、拡散板5及びプラテンガラス4を透過してミラー13に入射し、光学レンズ14を介してCCD12の受光面で受光される。
【0050】
この場合、ミラー13に入射する直接反射光は、指紋の山部からの直接反射光と比較して光量が多くなる。そのため、CCD12で受光される光により取得される画像は、山部に光を照射した場合と比較して明るい画像となる。
【0051】
図9は、上述のようにして取得した指紋画像の一例を示し、(a)は拡散板5を用いた場合の指紋画像、(b)は拡散板5を用いない場合の指紋画像である。図9(a)に示すように、拡散板5を用いた場合には、図9(b)に示す拡散板5を用いない場合と比較して、指紋の山部及び谷部のコントラストが鮮明になるため、指紋画像を鮮鋭化させることができる。
【0052】
尚、上述の例では、ミラー13による反射光をCCD12で受光する構成を例にとって説明したが、この例に限られず、例えば、ミラー13の位置にCCD12を配置し、CCD12がミラー13を介さずに被写体からの反射光を直接受光できるようにしてもよい。この場合には、ミラー13の位置及び角度を決定するときと同様に、CCD12の位置及び受光面の角度を決定する。
【0053】
以上のように、第1の実施形態によれば、光源からの光を拡散板を用いて拡散させることにより指紋画像を生成するため、取得する指紋画像を鮮鋭化させることが可能になる。また、指紋画像を鮮鋭化させるために、プリズムレンズやオプティカルファイバプレート等の特殊な光学部材を使用することなく拡散板を用いるため、装置を小型化することができるとともに、装置の低価格化を図ることが可能になる。
【0054】
さらに、第1の実施形態によれば、ラインセンサを用い、取得したライン毎の画像データを単に繋ぎ合わせて指紋画像を取得するため、高度な画像合成処理を行う必要がなく、信号処理用の回路やソフトウェアの複雑化を解消することができ、装置の低価格化を図ることが可能になる。
【0055】
次に、本発明の第2の実施形態について説明する。第2の実施形態では、被写体を転動させた場合を例にとって説明する。尚、以下では、説明が煩雑となるのを避けるため、上述の第1の実施形態と共通する部分には、同一の符号を付し、詳細な説明を省略する。
【0056】
図10は、本発明にかかる画像読取装置の第2の実施形態を示し、同図(a)に示すように、この画像読取装置10は、スキャナ筐体2と、読取ユニット3と、プラテンガラス4と、拡散板5と、拡散板5上に貼着された透明のタッチパネル7とから構成される。
【0057】
タッチパネル7は、図10(b)に示すように、例えば、上面視長方形状に形成され、図11に示すように、指6を載置する載置台として使用される。タッチパネル7では、図10(b)に示すように、短手方向(主走査方向)をY座標、長手方向(副走査方向)をX座標とし、指6が載置された位置を座標情報で出力する。尚、タッチパネル7のタイプには、抵抗膜方式、静電容量方式及び光学方式等があるが、いずれのものを用いてもよい。
【0058】
読取ユニット3は、図11に示すように、光源11、CCD12、ミラー13、光学レンズ14及びユニット筐体15から構成される。CCD12の受光面の幅(ライン幅)LWは、図12に示すように、タッチパネル7のX座標の1目盛り分の幅よりも大きい。
【0059】
図13は、画像読取装置1の機能構成を示すブロック図である。同図に示すように、画像読取装置10は、タッチパネル7上の指6の位置を検出する座標検出手段27と、座標検出手段27の検出結果に基づいて指6の移動量を検出し、移動検出信号DSを出力する移動検出手段28と、光源11と、CCD12と、CCDドライバ21と、コマンド受信部22と、画像信号処理部23と、座標検出手段27の移動検出信号DS及びCCDドライバ21の画像出力信号φTGに基づき、画像信号処理部23から出力される画像データIDを有効画像データと無効画像データに選別する画像選別手段29と、画像選別手段29から出力される有効画像データを記憶するメモリ24と、モータ25と、モータ25を制御するモータ制御手段30等から構成される。尚、これらの座標検出手段27〜モータ制御手段30は、いずれも図10の読取ユニット3内に搭載される。
【0060】
図14に示すように、座標検出手段27は、タッチパネル7の出力に応じて、指6がタッチパネル7上に載置されたか否かを検出し、タッチ検出信号TDを出力するタッチ検出部31と、タッチパネル7から出力されるX座標信号(指6がタッチパネル7を押圧した領域のうち、X座標方向の領域を示す信号)をA/D変換してX座標データXDを生成するX座標データ生成部32とを備える。
【0061】
また、移動検出手段28は、初期位置検出部41、開始位置算出部42、現在位置検出部43、移動量検出部44及び反転検出部45を備える。
【0062】
初期位置検出部41は、タッチ検出部31のタッチ検出信号TD及びX座標データ生成部32のX座標データXDに基づいて、指6がタッチパネル7を最初に押圧した位置(被検者が最初に指6を置いた位置)を検出し、検出した位置のX座標データを示す初期位置データX0を出力する。
【0063】
ここで、図15に示すように、副走査方向(X座標方向)における指6の押圧範囲は、タッチパネル7のX座標の1目盛り分の幅よりもはるかに大きいため、X座標データ生成部32から初期位置検出部41に与えられるX座標データXDは、左端のX座標データXD1から右端のX座標データXD2までの複数目盛り分の値となる。初期位置検出部41では、X座標データXD2から指6の内側に向かう方向へ所定量rだけ減算、又は、X座標データXD1から指6の内側に向かう方向へ所定量rだけ加算して座標値を補正し、この補正した値を指6の押圧位置と認定して初期位置データX0とする。
【0064】
尚、上記の補正機能は、必ずしも初期位置検出部41に搭載する必要はなく、座標検出手段27のX座標データ生成部32に搭載するようにしてもよい。また、タッチパネル7側の仕様により、当初から座標情報が1点に絞られて出力される(例えば、押圧領域の左端のX座標と右端のX座標との中間値が出力される)ような場合には、上記の座標補正は不要である。
【0065】
開始位置算出部42は、図16に示すように、初期位置検出部41の初期位置データX0に基づいて、読取ユニット3のホームポジションから読取開始位置までの移動量Mを算出するとともに、その移動量を示す初期駆動値MVを出力する。開始位置算出部42には、CCD12のライン幅LWがタッチパネル7のX座標の何目盛り分に当たるかの情報が予め記憶される。
【0066】
現在位置検出部43は、X座標データ生成部32のX座標データXDに基づいて、現在の指6の押圧位置を示す現位置X座標データXiを出力する。現在位置検出部43においても、図15に示す初期位置検出部41の場合と同様、X座標データXD1又はXD2から指6の内側に向かう方向へ所定量rだけ減算して座標値を補正し、この補正した値を指6の押圧位置と認定して現位置X座標データXiとする。尚、現位置X座標データXiの検出周期は、一定の周期で、かつ、CCD12の画像信号出力周期VT(図18参照)よりも短い周期に設定される。
【0067】
移動量検出部44は、現在位置検出部43の現位置X座標データXiに基づいて、指6の押圧位置の移動量がCCD12のライン幅LW(図12参照)に達しか否かを判定し、移動検出信号DSを出力する。
【0068】
図17に示すように、移動量検出部44は、後述の移動検出信号DSを立ち上げたときのX座標データXmを保持し、保持したX座標データXmを今回の現位置X座標データXiから減算して指6の移動量(Xi−Xm)を求める。そして、求めた移動量(Xi−Xm)が、CCD12のライン幅LWに相当する長さに達しているか否かを判定し、達していれば、図18に示すように、移動検出信号DSをHiレベルに立ち上げる。尚、移動量検出部44においても、CCD12のライン幅LWがタッチパネル7のX座標の何目盛り分に当たるかが予め記憶される。
【0069】
また、移動量検出部44は、指6の移動方向(副走査方向における正転であるか、逆転であるか)を判別し、移動方向を示す方向信号RDを出力する。この方向信号RDは、指6の移動方向が正転方向であればHiレベルとなり、指6の移動方向が逆転方向であればLowレベルとなる。指6の移動方向の判別は、上述の求めた移動量(Xi−Xm)を用いて行うことができ、移動量(Xi−Xm)が正の値であれば正転と判定し、負の値であれば逆転と判定する。
【0070】
反転検出部45は、指6の移動方向が反転した場合の動作を制御するために備えられる。反転検出部45では、移動量検出部44の方向信号RD及び移動量(Xi−Xm)に基づき、指6の逆転移動量を示す値(逆方向への移動量をライン数換算した値)Lを管理するとともに、この逆転移動量Lに基づいて反転復帰信号BSを生成する。
【0071】
反転復帰信号BSは、指6が逆方向に移動している期間(反転期間)、及び、逆方向に移動した状態から再反転して反転開始位置(指6の転動方向が正転から逆転に変化した位置)まで戻ってくる期間(復帰期間)を示す信号であり、図18に示すように、指6が正転から逆転への反転を開始してから元の位置に戻ってくるまでの間、Hiレベルに立ち上がる。
【0072】
図13に戻り、画像選別手段29は、図19に示すように、移動検出手段28からの移動検出信号DS、反転復帰信号BS及びCCDドライバ21からの画像出力信号φTGを入力し、画像選択信号SSを出力する選別部51と、選別部51の画像選択信号SSに基づき、画像データIDを、有効な画像データと、そうでない画像データとに振り分けるゲート部52とを備える。
【0073】
選別部51は、図18に示すように、反転復帰信号BSがLowレベルとなる期間において、移動検出信号DS及び画像出力信号φTGを参照し、移動検出信号DSがHiレベルに立ち上がった直後の画像出力信号φTGの立ち上がりに応答して、画像選択信号SSをHiレベルに立ち上げ、それをCCD12の画像信号出力周期VTの1周期分の期間にわたって保持する。ここで、画像選択信号SSのHiレベル期間は、画像データIDを有効画像化する期間に対応し、画像選択信号SSのLowレベル期間は、画像データIDを無効画像化する期間に対応する。
【0074】
一方、反転復帰信号BSがHiレベルとなる期間では、移動検出信号DS及び画像出力信号φTGに関係なく、画像選択信号SSをLowレベルに保持する。
【0075】
ゲート部52は、画像選択信号SSがHiレベルの期間において、画像信号処理部23から出力される画像データIDを有効画像として後段のメモリ24に出力し、一方、画像選択信号SSがLowレベルの期間において、画像データIDを無効な画像であるとして破棄する。尚、ゲート部52は、例えば、AND回路によって構成することができる。
【0076】
図13に戻り、モータ制御手段30は、図20に示すように、移動検出手段28からの移動検出信号DSに応答してモータ25を駆動するモータドライバ61と、CCD12(読取ユニット3)の読取開始位置までの移動を制御する開始位置制御部62とを備える。
【0077】
モータドライバ61は、移動量検出部44の移動検出信号DSがHiレベルに立ち上がったときに、モータ25を駆動し、CCD12(読取ユニット3)をライン幅LWだけ副走査方向に移動させる。また、モータドライバ61は、移動量検出部44の方向信号RDが正方向を示すときに、モータ25を正回転(CCD12を正方向移動させる回転方向)させ、方向信号RDが逆方向を示すときに、モータ25を逆回転させる。
【0078】
開始位置制御部62は、CCD12をホームポジションから読取開始位置まで移動させる際(図16参照)に使用するものであり、移動検出手段28からの初期駆動値MV(図14参照)とモータ駆動量(CCD12の移動ライン数)を対比し、両者が合致するまで、モータ25を駆動させるようにモータドライバ61に指示を与える。
【0079】
尚、図13〜図20を参照して説明した上記の構成は、必ずしも、その全てをハードウェアによって構成する必要はなく、一部をソフトウェア化して構成してもよいのは勿論のことである。
【0080】
次に、上記構成を有する画像読取装置10の動作について説明する。ここでは、先ず、指紋読取操作に際しての動作手順について、図21〜図24を中心に参照しながら説明する。
【0081】
外部から読取コマンドを受信すると、図21に示すように、先ず、反転検出部45(図14参照)において、逆転移動量(ライン数)Lを初期化し、L=0とする(ステップS11)。また、選別部51(図19参照)において、画像選択信号SSをLowレベルに立ち下げ、画像データIDの無効化設定を行う(ステップS12)。
【0082】
次いで、CCD12の駆動を開始し(ステップS13)、タッチパネル7上に指6が載置されるのを待機する(ステップS14)。そして、指6がタッチパネル7上に載置され、タッチ検出部31(図14参照)において、その旨が検出されると、これに応答し、初期位置検出部41によって、指6の初期位置を示す初期位置データX0を生成する(ステップS15)。
【0083】
次に、開始位置算出部42(図14参照)によって、読取ユニット3のホームポジションから読取開始位置までの移動量M(図16参照)を算出するとともに、開始位置制御部62(図20参照)によって、読取ユニット3を読取開始位置まで移動させる(ステップS16)。
【0084】
尚、図22(a)に示すように、例えば、読取ユニット3の中央部を位置基準Pとして読取ユニット3の位置制御を行うような場合、ミラー13及び光学レンズ14の配置位置にもよるが、ホームポジションから読取開始位置へ読取ユニット3を移動させた際に、ミラー13及び光学レンズ14の光軸16と指6の初期位置X0との間にズレを生じさせた状態で読取ユニット3が位置決めされることがある。
【0085】
このような場合には、図22(b)に示すように、読取ユニット3を読取開始位置まで移動させた後、光軸16と初期位置X0のズレ量sの分だけ読取ユニット3を逆方向に微小移動させて読取ユニット3の位置を補正するか、或いは、図16の移動量Mを求めた後に移動量Mからズレ量sを減算し(M−s)、これを基にして初期駆動値MVを求めるようにすればよい。
【0086】
但し、例えば、読取ユニットの位置基準Pを光軸16と揃えて設定する場合のように、当初からズレが生じないような構成を採る場合は、上記の補正処理は不要である。
【0087】
図21に戻り、被検者が指6の転動を開始すると(ステップS17)、現在位置検出部43(図14参照)によって、現在の指6の押圧位置を示す現位置X座標データXiを生成する(ステップS18)。尚、現位置X座標データXiの検出周期は、前述のように、一定の周期で、かつ、CCD12の画像信号出力周期(画像信号ISの出力周期)VT(図18参照)よりも短い周期に設定される。
【0088】
次いで、移動量検出部44(図14参照)によって、指6の移動量(Xi−Xm)を算出するとともに、指6の移動方向を示す方向信号RDを生成する(ステップS19)。次に、指6の移動方向が正転方向であるか否かを判別し(ステップS20)、正転である場合には(ステップS20:Y)、指6の移動量(Xi−Xm)がCCD12のライン幅LW(図12参照)に達しているか否かを判別する(ステップS21)。
【0089】
そして、指6の移動量(Xi−Xm)がライン幅LW以上である場合(移動検出信号DSがHiレベルに立ち上がった場合)には(ステップS21:Y)、指6の押圧位置が正転方向にライン幅LW以上移動したことを示すため、モータドライバ61(図20参照)によって、モータ25を駆動し、ライン幅LWに相当する距離だけ、CCD12(読取ユニット3)を正転方向へ移動させる(ステップS22)。こうして、図24(a)に示すように、指6の動きに追従させながら、CCD12を1ラインずつ正方向移動させる。
【0090】
尚、図21においては、ステップS22の次段にステップS23を設けているが、これについては、便宜上、説明を省略して後述することにする。
【0091】
ステップS22の処理と併行し、選別部51において、画像選択信号SSをHiレベルに立ち上げ、画像信号処理部23から出力される画像データIDを有効化する(ステップS24)。画像選択信号SSの立ち上げは、前述のように、移動検出信号DSがHiレベルに立ち上がった直後の画像出力信号φTGの立ち上がりに応答して行われ、また、画像選択信号SSのHiレベル期間は、CCD12の画像信号出力周期VTの1周期分の期間にわたって保持される(図18参照)。これにより、1ライン分の画像データIDが有効化され、有効化された画像データIDは、ゲート部52(図19参照)を通じてメモリ24に出力される。
【0092】
一方、指6の移動量(Xi−Xm)がライン幅LW未満である場合(移動検出信号DSが立ち上がっていない場合)には(ステップS21:N)、選別部51において、画像データIDを無効化した状態(画像選択信号SSをLowレベルに立ち下げた状態)を維持する(ステップS25)。
【0093】
これらに対し、指6の移動方向が逆転方向である場合には(ステップS20:N)、選別部51において、画像データIDを無効化した状態を維持するとともに(ステップS26)、指6の移動量(Xi−Xm)の絶対値がライン幅LW以上であるか否かを判別する(ステップS27)。
【0094】
指6の移動量(Xi−Xm)の絶対値がライン幅LWよりも小さい場合には(ステップS27:N)、ステップS18に移行し、次の現位置X座標データXiの検出タイミングが到来するのに応じて、ステップS18以降の処理を実行する。
【0095】
一方、指6の移動量(Xi−Xm)の絶対値がライン幅LW以上の場合には(ステップS27:Y)、指6の押圧位置が逆転方向にライン幅LW以上移動したことを示すため、反転検出部45において、逆転移動量Lに1ライン分を加算する(ステップS28)。また、モータ25を逆回転させ、CCD12をライン幅LWに相当する距離だけ、逆転方向へ移動させる(ステップS29)。
【0096】
その後、次の現位置X座標データXiの検出タイミングが到来するのに応じて、ステップS18の処理を実行し、ステップS20において、指6の移動方向が正転方向であるか否かを判別する。この時点で、指6の逆転方向への移動が継続されていれば(ステップS20:N)、再度、ステップS26に処理が移行し、ステップS26〜ステップS29の処理を繰り返す。このため、移動量(Xi−Xm)の絶対値がライン幅LW以上となる都度、逆転移動量Lに「1」が累加算されるとともに、図24(b)に示すように、指6の動きに追従してCCD12が1ラインずつ逆方向移動される。
【0097】
これに対し、ステップS20の処理に際して、指6の移動方向が正転方向に変化していれば(ステップS20:Y)、ステップS21に処理が移行し、指6の移動量(Xi−Xm)がライン幅LW以上であるか否かを判別する。そして、指6の正転方向への移動量(反転開始位置に戻る方向への移動量)がライン幅LW以上である場合には(ステップS21:Y)、モータ25を正回転させ、CCD12を1ライン分だけ正転方向に戻す(ステップS22)。
【0098】
次いで、反転検出部45の逆転移動量Lが「0」であるか否かを判別する(ステップS23)。この処理は、CCD12が指6の反転開始位置まで戻ったかを確認するためのものであり、逆転移動量L=0でない場合(ステップS23:N)、すなわち、反転開始位置まで戻りきっていない場合には、画像データIDの無効化を維持しつつ(ステップS30)、反転検出部45が保持する逆転移動量Lから「1」を減算する(ステップS31)。尚、逆転移動量Lから「1」を減算するのは、ステップS22でCCD12を1ライン分だけ正転方向に戻したことに対応するものである。
【0099】
以後、逆転移動量Lが「0」になるまで上記の処理を繰り返し、図24(c)に示すように、指6が反転開始位置に戻っていくのに追従させながら、CCD12を1ラインずつ正転方向へ移動させていく。そして、逆転移動量L=0、すなわち、指6の反転開始位置までCCD12が戻りきっていれば(ステップS23:Y)、ステップS24に処理を移行し、上記と同様にして、画像データIDを適宜有効化しながら、CCD12を1ラインずつ断続的に正方向移動させる。
【0100】
その後、タッチパネル7から指6が離れるか、或いは、画像データIDの取得ライン数が有効画像指定ライン数に達するまで(ステップS32、S33)、ステップS18〜ステップS31の処理を繰り返し、指6の一方の側面から他方の側面までの回転指紋像を1ラインずつ取得する。尚、有効画像指定ライン数とは、万人の回転指紋像の大凡の大きさを見込んで予め設定するものであり、見込んだ回転指紋像の大きさをCCD12のライン数に換算して数値化したものである。
【0101】
そして、タッチパネル7から指6が離れるか、或いは、画像データIDの取得ライン数が有効画像指定ライン数に達していれば(ステップS32:Y、S23:Y)、読取操作を終了し、図23に示すように、CCD12をホームポジションに戻すとともに、CCD12の駆動を停止する(ステップS34、S35)。
【0102】
次に、図21〜図24に示す手順の下での画像読取装置1の動作例について説明する。ここでは、先ず、タッチパネル7上に載置した指6を正転方向にのみ転動させた場合について、図25を中心に参照しながら説明する。尚、図25において、図示を省略しているが、反転復帰信号BSは、Lowレベルに立ち下がった状態で維持されている。
【0103】
当初、指6の転動速度が遅かった場合、タイミングt1で移動検出信号DSが立ち上がってから、しばらく移動検出信号DSが立ち上がらない状態が続く。この場合、先ず、移動検出信号DSが立ち上がった直後の画像出力信号φTGの立ち上がり(タイミングt2)に応答して、画像選択信号SSが立ち上がり、画像データID(A)を有効化する。また、移動検出信号DSの立ち上がり(タイミングt1)に応答して、モータ駆動信号が立ち上がり、CCD12が正転方向に1ライン分だけ移動される。
【0104】
そして、CCD12の画像信号出力周期VTが経過する(次の画像出力信号φTGが立ち上がる)のに応じて、画像選択信号SSが立ち下がり、画像データIDを無効化するように遷移する(タイミングt3)。その後、画像選択信号SSの次の立ち上がり(タイミングt5)まで、画像データIDの無効化が継続され、その間に出力される画像データID(B)、ID(C)は全て破棄される。
【0105】
タイミングt4において、移動検出信号DSの2度目の立ち上がりがあると、上記の場合と同様にして、画像データID(D)の有効化及びモータ駆動が行われる。この際、指6の転動速度が変化して速くなっていると、タイミングt4以降、短い周期で移動検出信号DSが立ち上がるようになる。それに応答して、画像データIDを有効化する頻度が上がり、画像データID(D)の次の画像データID(E)も有効化される。
【0106】
以後、指6の進み具合に応じて、画像データIDの有効化/無効化を選別するとともに(タイミングt6〜t11)、適宜、CCD12を正方向へ断続的に移動させつつ、読取操作を進める。そして、読取操作が終了した時点で、有効化した画像データ(メモリ24に記憶した画像データ)ID(A)、ID(D)、ID(E)、ID(G)〜ID(I)、ID(K)〜(M)及びID(O)を繋ぎ合わせ、1枚の指紋像を取得する。尚、画像データIDの繋ぎ合わせは、いわゆる画像合成処理のような高度なデータ編集は不要であり、メモリ24に書き込んだ画像データIDを書き込み順序に従って読み出すだけでよい。
【0107】
このように、第2の実施形態においては、CCD12から1ライン単位で定期的に画像信号ISを出力させつつ、指6の押圧位置の移動量を検出して、指6の転動に追従させてCCD12を移動させるように構成し、その上で、指6の押圧位置の移動量がライン幅LWに達する都度、画像データIDを選択的に有効化するようにしたため、指紋像の重複(画像の重複)を回避しながら、1ラインずつ順番に指紋像を得ることが可能になる。そして、そのようにして得たライン単位の複数の画像データIDを繋ぎ合わせて回転指紋の全体像を生成するため、フレーム画像(エリア画像)を合成する場合に比べて画像の繋ぎ目に歪みが生じ難く、従来のような歪み補正処理を用いずとも、歪みの少ない良質な画像を取得することが可能になる。
【0108】
次に、タッチパネル7上に載置した指6の転動方向を反転させた場合について、図26を中心に参照しながら説明する。
【0109】
タイミングt21〜t24において、指6が正方向に転動されている間は、方向信号RDがHiレベルに立ち上がり、図25のタイミングt1〜t3の場合と同様に動作する。
【0110】
そして、タイミングt24において、指6の転動方向が反転し、指6の押圧位置が逆方向に移動し始めると、反転復帰信号BSがHiレベルに立ち上がる。反転復帰信号BSは、指6が再反転して反転開始位置(指6の転動方向が正転から逆転に変化した位置)に戻ってくるタイミングt30まで、Hiレベルの状態が維持される。このため、タイミングt24〜t30の間に出力される画像データID(C)〜ID(H)は、全て無効化され、破棄される。
【0111】
また、タイミングt25において、指6の逆方向への移動量がライン幅LWに達すると、モータ駆動信号が立ち上がり(タイミングt26)、モータ25が逆回転駆動され、CCD12が逆方向に移動される。
【0112】
その後、タイミングt27において、指6の転動方向が再反転して指6の押圧位置が正方向に移動し始めると、方向信号RDがHiレベルに立ち上がる。そして、タイミングt28において、指6の正方向への移動量がライン幅LWに達すると、モータ駆動信号が立ち上がり(タイミングt29)、モータ25が正回転駆動されてCCD12が正方向に移動される。
【0113】
指6が反転開始位置まで戻ってきたタイミングt30以後は、図25の場合と同様、指6の進み具合に応じて、画像データIDの有効化/無効化を選別するとともに、適宜、CCD12を正方向に移動させつつ、読取操作を進める。
【0114】
このように、第2の実施形態においては、指6の転動方向が反転するタイミング、及び、指6が再反転して反転開始位置に戻ってくるタイミングを検出し、それらの間において、画像データIDを全て無効化するようにしたため、被検者が指6を正しく転動させなかった期間の画像データIDを適宜廃棄することができる。このため、かかる期間の画像データIDが繋ぎ合わせ後の画像に混入することがなく、繋ぎ合わせ後の画像が乱れるのを回避することが可能になる。これにより、読み取りの途中で被検者が指6の転動方向を変えた場合でも、再度の読み取りを強いることがなく、利便性を向上させることが可能になる。
【0115】
尚、第2の実施形態においては、指6の転動方向が反転した場合に、その動きに追従してCCD12を移動させるように構成したが(図24(b)参照)、図27(a)〜(c)に示すように、指6が逆方向に転動しても、CCD12を逆方向へ移動させずに指6の反転開始位置で停止させ、その後、指6が再反転して反転開始位置まで戻ってくるまで待機させるようにしてもよい。そして、指6が反転開始位置まで戻ってきた後は、図25の場合と同様に、指6の押圧位置の移動に追従してCCD12を正方向へ移動させる。
【0116】
さらに、第2の実施形態においては、指6の押圧位置の移動量がライン幅LWに達したか否かを判定するにあたり、移動検出信号DSを立ち上げたときのX座標データXmを保持し、これを今回の現位置X座標データXiから減算して移動量(Xi−Xm)を求め、求めた移動量(Xi−Xm)がライン幅LW以上になるかを判定するように構成したが、図28に示すように、検出周期DT毎のX座標データXi1〜Xi6を累加算して移動量Xaddを求めるとともに、その移動量Xaddがライン幅LWに相当する長さ以上になるか否かを判定するようにしてもよい。この場合、移動量Xaddは、移動検出信号DSが立ち上がる都度、「0」にリセットされる。
【0117】
また、第2の実施形態においては、指6の押圧位置を認定するにあたり、一律に所定量rを加減算して押圧位置を認定するように構成したが(図15参照)、例えば、初期位置検出部41、現在位置検出部43において、XD1+{(XD2−XD1)/2}又はXD2−{(XD2−XD1)/2}の算出処理を行い、常時、X座標データXD1とX座標データXD2の中央座標を求め、これを押圧位置として認定するようにしてもよい。
【0118】
このように、第2の実施形態によれば、拡散板を用いることにより、被写体を転動させた場合であっても指紋画像を鮮鋭化させることができる。また、指6の押圧位置の移動量がライン幅LWに達する都度、画像データIDを選択的に有効化するように構成したため、従来のような歪み補正処理を用いずとも、歪みの少ない良質な画像を取得することができる。このため、信号処理用の回路やソフトウェアの複雑化を解消することができ、装置の低価格化を図ることが可能になる。
【0119】
以上、本発明の第1及び第2の実施形態について説明したが、本発明は、上記構成に限定されるものではなく、特許請求の範囲に記載された発明の範囲内で種々の変更が可能である。例えば、上記第1及び第2の実施形態においては、画像信号ISを出力するラインセンサとしてCCDを例示したが、必ずしもCCDを用いる必要はなく、例えば、CMOS(Complementary Metal Oxide Semiconductor)センサ等の他の撮像素子を用いてもよい。
【0120】
また、上記第1及び第2の実施形態においては、本発明にかかる画像読取装置を指紋の読み取りに用いる場合を例示したが、読み取りの対象物(被写体)は、指に限られるものではなく、如何なるものであってもよい。
【0121】
さらに、上記第2の実施形態においては、タッチパネル7上を転動させて表面像を読み取るものであれば、広く適用することができ、例えば、飲料用や食料用の缶の表面検査等にも応用することができる。尚、被写体は、円筒状の物体であることが好ましいが、多少歪な形状であってもタッチパネル7上で転動し得るものであれば問題ない。
【符号の説明】
【0122】
1、10 画像読取装置
2 スキャナ筐体
3 読取ユニット
4 プラテンガラス
5 拡散板
6 指
7 タッチパネル
11 光源
12 CCD
13 ミラー
14 光学レンズ
15 ユニット筐体
16 光軸
21 CCDドライバ
22 コマンド受信部
23 画像信号処理部
24 メモリ
25 モータ
26 モータドライバ
27 座標検出手段
28 移動検出手段
29 画像選別手段
30 モータ制御手段
31 タッチ検出部
32 X座標データ生成部
41 初期位置検出部
42 開始位置算出部
43 現在位置検出部
44 移動量検出部
45 反転検出部
51 選別部
52 ゲート部
61 モータドライバ
62 開始位置制御部
【特許請求の範囲】
【請求項1】
指紋等の被写体を読み取る画像読取装置において、
光を透過する板状部材により構成され、前記被写体を載置する被写体載置部と、
前記被写体に対して光を照射する光源と、前記被写体を撮影し、画像信号を出力する撮像手段とを含む画像読取ユニットとを備え、
前記画像読取ユニットは、前記被写体載置部の前記被写体が接する面の裏側に位置し、前記撮像手段に備えるラインセンサで前記被写体の受光面の1ラインを主走査として読み取る手段と、前記主走査に対して垂直な副走査方向に移動する搬送手段を有し、
前記被写体載置部は、光を拡散させる拡散部材を有することを特徴とする画像読取装置。
【請求項2】
前記拡散部材は、前記被写体が載置される面に拡散面を有することを特徴とする請求項1に記載の画像読取装置。
【請求項3】
前記拡散部材は、入射光を前記副走査方向に拡散させることを特徴とする請求項1又は2に記載の画像読取装置。
【請求項4】
前記光源は、前記拡散部材の拡散する角度に応じて前記照射角度を決定することを特徴とする請求項1乃至3のいずれかに記載の画像読取装置。
【請求項5】
前記被写体が前記被写体載置部と接する位置において光の入射角度と等しい反射角度の光を前記ラインセンサが受光するように、前記光源及び前記ラインセンサを配置することを特徴とする請求項1乃至4のいずれかに記載の画像読取装置。
【請求項6】
前記拡散部材上に貼着され、前記被写体によって押圧される押圧位置を前記副走査方向の座標情報で出力するタッチパネルと、
前記タッチパネルから出力される座標情報に基づき、該タッチパネル上での前記被写体の押圧位置の前記副走査方向への移動量を検出する検出手段とをさらに備え、
前記搬送手段は、前記検出手段で検出される移動量に基づき、前記被写体の転動に追従させて前記画像読取ユニットを前記副走査方向に移動させることを特徴とする請求項1乃至5のいずれかに記載の画像読取装置。
【請求項1】
指紋等の被写体を読み取る画像読取装置において、
光を透過する板状部材により構成され、前記被写体を載置する被写体載置部と、
前記被写体に対して光を照射する光源と、前記被写体を撮影し、画像信号を出力する撮像手段とを含む画像読取ユニットとを備え、
前記画像読取ユニットは、前記被写体載置部の前記被写体が接する面の裏側に位置し、前記撮像手段に備えるラインセンサで前記被写体の受光面の1ラインを主走査として読み取る手段と、前記主走査に対して垂直な副走査方向に移動する搬送手段を有し、
前記被写体載置部は、光を拡散させる拡散部材を有することを特徴とする画像読取装置。
【請求項2】
前記拡散部材は、前記被写体が載置される面に拡散面を有することを特徴とする請求項1に記載の画像読取装置。
【請求項3】
前記拡散部材は、入射光を前記副走査方向に拡散させることを特徴とする請求項1又は2に記載の画像読取装置。
【請求項4】
前記光源は、前記拡散部材の拡散する角度に応じて前記照射角度を決定することを特徴とする請求項1乃至3のいずれかに記載の画像読取装置。
【請求項5】
前記被写体が前記被写体載置部と接する位置において光の入射角度と等しい反射角度の光を前記ラインセンサが受光するように、前記光源及び前記ラインセンサを配置することを特徴とする請求項1乃至4のいずれかに記載の画像読取装置。
【請求項6】
前記拡散部材上に貼着され、前記被写体によって押圧される押圧位置を前記副走査方向の座標情報で出力するタッチパネルと、
前記タッチパネルから出力される座標情報に基づき、該タッチパネル上での前記被写体の押圧位置の前記副走査方向への移動量を検出する検出手段とをさらに備え、
前記搬送手段は、前記検出手段で検出される移動量に基づき、前記被写体の転動に追従させて前記画像読取ユニットを前記副走査方向に移動させることを特徴とする請求項1乃至5のいずれかに記載の画像読取装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】

【図7】
【図8】

【図10】

【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】

【図18】
【図19】
【図20】
【図21】

【図22】
【図23】

【図24】
【図25】
【図26】

【図27】

【図28】

【図9】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図23】
【図24】
【図25】
【図26】
【図27】
【図28】
【図9】
【公開番号】特開2012−155578(P2012−155578A)
【公開日】平成24年8月16日(2012.8.16)
【国際特許分類】
【出願番号】特願2011−14889(P2011−14889)
【出願日】平成23年1月27日(2011.1.27)
【出願人】(303013763)NECエンジニアリング株式会社 (651)
【Fターム(参考)】
【公開日】平成24年8月16日(2012.8.16)
【国際特許分類】
【出願日】平成23年1月27日(2011.1.27)
【出願人】(303013763)NECエンジニアリング株式会社 (651)
【Fターム(参考)】
[ Back to top ]