
画像追尾装置
【課題】相対的に接近する移動被写体を追尾する場合でも、追尾精度の低下を抑制する。
【解決手段】画像追尾装置は、結像光学系により結像される像を繰り返し撮像して、被写界画像を生成する撮像手段と、追尾対象領域に基づいて、少なくとも1つの第1テンプレート画像を含む複数のテンプレート画像を生成する生成手段と、被写界画像の内部の探索領域画像と、複数のテンプレート画像のそれぞれとの間の相関関係を演算する演算手段と、複数のテンプレート画像のそれぞれに対する演算結果を比較し、比較結果に基づいて、演算結果を選択する選択手段と、選択された演算結果に基づいて、被写界画像における追尾対象の画像の位置を検出する検出手段とを備え、生成手段は、追尾対象領域に含まれる画像領域を補間処理により拡大し、拡大された画像領域に基づいて、第1テンプレート画像を生成する。
【解決手段】画像追尾装置は、結像光学系により結像される像を繰り返し撮像して、被写界画像を生成する撮像手段と、追尾対象領域に基づいて、少なくとも1つの第1テンプレート画像を含む複数のテンプレート画像を生成する生成手段と、被写界画像の内部の探索領域画像と、複数のテンプレート画像のそれぞれとの間の相関関係を演算する演算手段と、複数のテンプレート画像のそれぞれに対する演算結果を比較し、比較結果に基づいて、演算結果を選択する選択手段と、選択された演算結果に基づいて、被写界画像における追尾対象の画像の位置を検出する検出手段とを備え、生成手段は、追尾対象領域に含まれる画像領域を補間処理により拡大し、拡大された画像領域に基づいて、第1テンプレート画像を生成する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、画像追尾装置に関する。
【背景技術】
【0002】
従来から、移動被写体を撮影する際に、画面内の指示部分の被写体像をテンプレート画像として取得し、繰り返し撮影する画像の中でテンプレート画像と類似した被写体像の位置を検索(テンプレートマッチング)し、画面内を横方向へ移動する被写体を追尾する画像追尾装置が知られている。たとえば特許文献1では、複数のテンプレート画像を用いてテンプレートマッチングを行うことによって、追尾精度を向上させる技術が開示されている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2008−187331号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、相対的に接近する移動被写体の画像上でのサイズは大きくなるので、テンプレート画像と類似した被写体像の検出精度が低下して、被写体を追尾できなくなるという問題がある。
【課題を解決するための手段】
【0005】
請求項1に記載の発明による画像追尾装置は、結像光学系により結像される像を繰り返し撮像して、被写界画像を生成する撮像手段と、被写界画像に含まれる追尾対象領域に基づいて、少なくとも1つの第1テンプレート画像を含む複数のテンプレート画像を生成する生成手段と、被写界画像の内部の探索領域画像と、生成手段により生成された複数のテンプレート画像のそれぞれとの間の相関関係を演算する演算手段と、演算手段による複数のテンプレート画像のそれぞれに対する演算結果を比較し、比較結果に基づいて、演算結果を選択する選択手段と、選択手段により選択された演算結果に基づいて、被写界画像における追尾対象の画像の位置を検出する検出手段とを備え、生成手段は、追尾対象領域に含まれる画像領域を補間処理により拡大し、拡大された画像領域に基づいて、第1テンプレート画像を生成することを特徴とする。
請求項13に記載の発明による画像追尾装置は、結像光学系により結像される像を繰り返し撮像して、被写界画像を生成する撮像手段と、被写界画像に基づいて、少なくとも1つの第1テンプレート画像を含む複数のテンプレート画像を生成する生成手段と、被写界画像における探索領域画像と、生成手段により生成された複数のテンプレート画像のそれぞれとの間の相関関係を演算する演算手段と、結像光学系の撮影距離に関する情報を入力する入力手段と、入力手段により入力された撮影距離に関する情報に基づいて、追尾対象が相対的に接近していることを判定する判定手段と、判定手段により追尾対象が接近していると判定された場合には、演算手段による複数のテンプレート画像のそれぞれに対する演算結果のうち、第1テンプレート画像に対する演算結果を優先して選択し、判定手段により追尾対象の接近が判定されない場合には、演算手段による演算結果のうち第1テンプレート画像とは異なるテンプレート画像による演算結果を選択する選択手段と、選択手段により選択された演算結果に基づいて、被写界画像における追尾対象の画像の位置を検出する検出手段と備え、生成手段は、被写界画像に含まれる追尾対象領域を決定し、追尾対象領域に含まれる画像領域を補間処理により拡大し、拡大された画像領域に基づいて、第1テンプレート画像を生成することを特徴とする。
請求項14に記載の発明による画像追尾装置は、結像光学系により結像される像を繰り返し撮像して、被写界画像を生成する第1撮像手段と、被写界画像に基づいて、少なくとも1つの第1テンプレート画像を含む複数のテンプレート画像を生成する生成手段と、被写界画像における探索領域画像と、生成手段により生成された複数のテンプレート画像のそれぞれとの間の相関関係を演算する演算手段と、結像光学系の焦点状態を演算して、焦点調節を行う焦点調節手段と、焦点調節手段による演算結果に基づいて、追尾対象が結像光学系の光軸方向に対して接近しているか否かを判定する判定手段と、判定手段により追尾対象が接近していると判定された場合には、演算手段による複数のテンプレート画像のそれぞれに対する演算結果のうち、第1テンプレート画像に対する演算結果を優先して選択し、判定手段により追尾対象の接近が判定されない場合には、演算手段による演算結果のうち第1テンプレート画像とは異なるテンプレート画像による演算結果を選択する選択手段と、選択手段により選択された演算結果に基づいて、被写界画像における追尾対象の画像の位置を検出する検出手段と備え、生成手段は、被写界画像に含まれる追尾対象領域を決定し、追尾対象領域に含まれる画像領域を補間処理により拡大し、拡大された画像領域に基づいて、第1テンプレート画像を生成することを特徴とする。
【発明の効果】
【0006】
本発明によれば、追尾対象領域に含まれる画像領域を拡大した第1テンプレート画像を少なくとも1つ含む複数のテンプレート画像の演算結果に基づいて、追尾対象の画像の位置を検出できる。
【図面の簡単な説明】
【0007】
【図1】一実施の形態の画像追尾装置を備えた撮像装置の構成を示す横断面図
【図2】一実施の形態の画像追尾装置を備えた撮像装置の構成を示すブロック図
【図3】実施の形態の追尾制御部が備える機能を示すブロック図
【図4】第2撮像素子の構成および被写界画像を例示する平面図
【図5】一実施の形態の画像追尾方法を説明するための図
【図6】一実施の形態の画像追尾方法を説明するための図
【図7】一実施の形態の画像追尾方法を説明するための図
【図8】一実施の形態の画像追尾方法を説明するための図
【図9】一実施の形態の画像追尾方法を説明するための図
【図10】一実施の形態の画像追尾処理を示すフローチャート
【図11】追尾制御初期処理を示すフローチャート
【図12】拡大テンプレート更新処理を示すフローチャート
【図13】変形例における拡大テンプレート画像の生成処理を説明するための図
【図14】変形例における拡大テンプレート画像の生成処理を説明するための図
【発明を実施するための形態】
【0008】
撮影画面内に設定された複数の焦点検出エリアにおいて撮影レンズの焦点調節状態(この一実施の形態ではデフォーカス量)を検出し、いずれかのエリアのデフォーカス量に基づいて撮影レンズを合焦駆動する自動焦点調節(AF)機能と、撮影画像の中の追尾対象の被写体の画像をテンプレート画像(基準画像)として記憶し、繰り返し撮像される画像の中でテンプレート画像と同一または類似した画像の位置を検索しながら(テンプレートマッチング)追尾対象の被写体を追尾する画像追尾機能とを備え、AF機能と画像追尾機能により撮影レンズを駆動しながら追尾対象を追尾する画像追尾装置を備えた撮像装置(一眼レフデジタルスチルカメラ)の一実施の形態を説明する。
【0009】
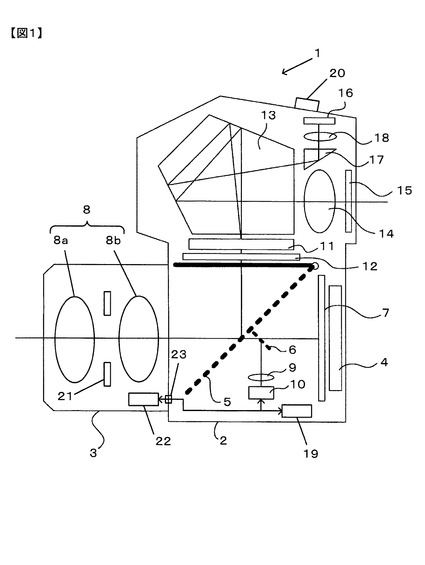
図1は、一実施の形態の画像追尾装置を備えた撮像装置(一眼レフデジタルスチルカメラ)1の構成を示す。なお、図1では画像追尾機能とは直接関係のないカメラの機器および回路についての図示と説明を省略する。一実施の形態のカメラ1では、撮影レンズ8、絞り21等を有する交換レンズ3がカメラ本体2に着脱可能に装着される。カメラ本体2には被写界像を撮像して画像を記録するための第1撮像素子4が設けられる。この第1撮像素子4はCCDやCMOSなどにより構成することができる。撮影時にはクイックリターンミラー5およびサブミラー6が実線で示す撮影光路外の位置に退避してシャッター7が開放され、撮影レンズ8により第1撮像素子4の受光面に被写体像が結像される。
【0010】
カメラ本体2の底部には、撮影レンズ8の焦点調節状態を検出するための焦点検出光学系9と測距素子10が設けられている。この一実施の形態では、瞳分割型位相差検出方式による焦点検出方法を採用した例を示す。焦点検出光学系9は、撮影レンズ8を通過した対の焦点検出用光束を測距素子10の受光面へ導き、対の光像を結像させる。測距素子10は例えば対のCCDラインセンサーを備え、対の光像に応じた焦点検出信号を出力する。撮影前にはクイックリターンミラー5およびサブミラー6が破線で示すような撮影光路内の位置に設定されており、撮影レンズ8からの対の焦点検出用光束はクイックリターンミラー5のハーフミラー部を透過し、サブミラー6により反射されて焦点検出光学系9および測距素子10へ導かれる。
【0011】
カメラ本体2の上部にはファインダー光学系が設けられている。撮影前にはクイックリターンミラー5およびサブミラー6が破線で示す位置にあり、撮影レンズ8からの被写体光の一部はクイックリターンミラー5に反射されて焦点板11へ導かれ、焦点板11上に被写体像が結像する。液晶表示素子12は、焦点板11上に結像された被写界像に焦点検出エリアマークなどの情報を重畳表示するとともに、被写界像外の位置に露出値などの種々の撮影情報を表示する。焦点板11上の被写界像はペンタダハプリズム13および接眼レンズ14を介して接眼窓15へ導かれ、撮影者が被写界像を視認することができる。
【0012】
また、カメラ本体2上部のファインダー光学系には、被写体追尾や測光のために被写界像を撮像する第2撮像素子16が設けられる。焦点板11に結像した被写界像は、ペンタダハプリズム13、プリズム17および結像レンズ18を介して第2撮像素子16の受光面に再結像される。
【0013】
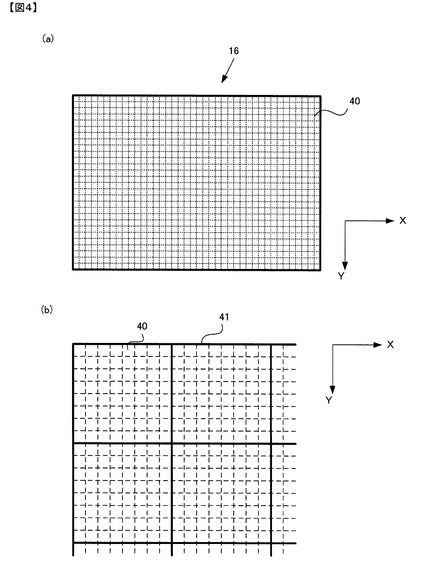
図4(a)は第2撮像素子16の詳細な構成を示す正面図である。図4(a)においては水平方向をx軸、垂直方向をy軸とする座標系を用いる。第2撮像素子16は、マトリクス状に配列された複数の画素(光電変換素子)40(たとえば、横640個×縦480個の画素)を備えている。なお、図4(a)においては、図示の都合上、画素40の個数は上記横640個×縦480個よりも少ない個数で示している。さらに、各画素40にはそれぞれ赤R、緑G、青Bの原色フィルターが設けられている。これにより、各画素40ごとに被写界画像のRGB信号(被写界画像信号)を後述するボディ駆動制御装置19(図2)に出力することができる。詳細を後述するが、この第2撮像素子16により撮像された被写界画像信号に基づいて、ボディ駆動制御装置19によって追尾制御と露出演算とが行われる。なお、ボディ駆動制御装置19は、追尾制御と露出演算は第1撮像素子4による撮像により出力された被写界画像信号に基づいて行うこととしてもよい。
【0014】
カメラ本体2にはまた、ボディ駆動制御装置19、操作部材20などが設けられる。ボディ駆動制御装置19は、詳細を後述するマイクロコンピューターとメモリ、A/D変換器などの周辺部品から構成され、カメラ1の種々の制御と演算を行う。操作部材20には、レリーズボタン、焦点検出エリア選択スイッチ、撮影モード選択スイッチなどのカメラ1を操作するためのスイッチやセレクターが含まれる。
【0015】
交換レンズ3には、ズーミングレンズ8a、フォーカシングレンズ8b、絞り21、レンズ駆動制御装置22などが設けられる。なお、この一実施の形態では撮影レンズ8をズーミングレンズ8a、フォーカシングレンズ8bおよび絞り21で代表的に表すが、撮影レンズ8の構成は図1に示す構成に限定されない。レンズ駆動制御装置22は図示しないマイクロコンピューターとメモリ、駆動回路、アクチュエーターなどの周辺部品から構成され、レンズ8a、8bおよび絞り21の駆動制御とそれらの位置検出を行う。レンズ駆動制御装置22に内蔵されるメモリには、交換レンズ3の焦点距離や開放絞り値などのレンズ情報が記憶されている。
【0016】
ボディ駆動制御装置19とレンズ駆動制御装置22はレンズマウント部の接点23を介して通信を行う。この通信によって、ボディ駆動制御装置19はレンズ駆動制御装置22へレンズ駆動量や絞り値などの情報を送信し、レンズ駆動制御装置22はボディ駆動制御装置19へレンズ情報や絞り情報を送信する。
【0017】
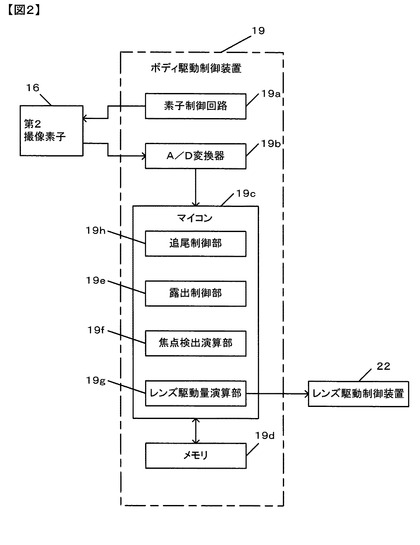
図2はボディ駆動制御装置19の詳細な構成を示す。なお、画像追尾機能とは直接関係のない制御機能については図示と説明を省略する。ボディ駆動制御装置19は素子制御回路19a、A/D変換器19b、マイクロコンピューター19c、メモリ19dなどを備えている。素子制御回路19aは第2撮像素子16の電荷の蓄積と読み出しを制御する。A/D変換器19bは、第2撮像素子16から出力されるアナログ画像信号をデジタル画像信号に変換する。撮影者により操作部材20のレリーズボタンが半押しされると半押しスイッチ(不図示)がオンし、図1に示すように、撮影レンズ8を通過した被写体光の一部は破線で示すクイックリターンミラー5により反射され、ペンタダハプリズム13、プリズム17および結像レンズ18を介して第2撮像素子16へ導かれる。レリーズボタンが半押しされている間、第2撮像素子16により繰り返し周期的に被写界画像を撮像することができる。
【0018】
マイクロコンピューター19cは、ソフトウエア形態により露出制御部19e、焦点検出演算部19f、レンズ駆動量演算部19gおよび追尾制御部19hを構成する。メモリ19dは、画像追尾用のテンプレート画像やデフォーカス量などの情報、撮影レンズ8の焦点距離、開放F値、絞り値、像ズレ量からデフォーカス量への変換係数などのレンズ情報などを記憶する。
【0019】
露出制御部19eは、第2撮像素子16により撮像した画像信号に基づいて露出値を演算する。焦点検出演算部19fは、測距素子10から出力される対の光像に応じた焦点検出信号に基づいて撮影レンズ8の焦点調節状態、ここではデフォーカス量を検出する。なお、詳細を後述するが、撮影レンズ8の撮影画面内には複数の焦点検出エリアが設定されており、測距素子10は焦点検出エリアごとに対の光像に応じた焦点検出信号を出力し、焦点検出演算部19fは焦点検出エリアごとに対の光像に応じた焦点検出信号に基づいてデフォーカス量を検出する。撮影者により操作部材20のレリーズボタンが半押しされると半押しスイッチ(不図示)がオンし、図1に示すように、撮影レンズ8を通過した被写体光の一部は破線で示すクイックリターンミラー5のハーフミラー部を通ってサブミラー6および焦点検出光学系9を介して測距素子10へ導かれ、焦点検出演算部19fにより焦点検出演算が行われる。レンズ駆動量演算部19gは検出されたデフォーカス量をレンズ駆動量に変換する。なお、焦点調節状態の検出は、レリーズボタンが半押しされている間、繰り返し周期的に行われる。
【0020】
追尾制御部19hは、画像追尾動作(処理)を行う。すなわち、追尾制御部19hは、第2撮像素子16により撮像した被写界像の内、撮影者が手動で指定した追尾対象位置、あるいはカメラ1が自動で設定した追尾対象位置に対応する画像をテンプレート画像(基準画像)としてメモリ19dに記憶させる。そして、追尾制御部19hは、撮影周期ごとに第2撮像素子16により繰り返し撮影される被写界画像の中からテンプレート画像と一致または類似する画像領域を検索することによって対象の位置を認識する。
【0021】
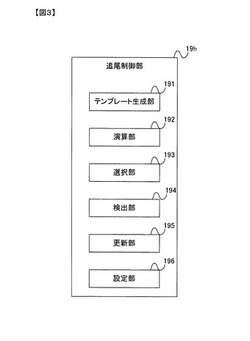
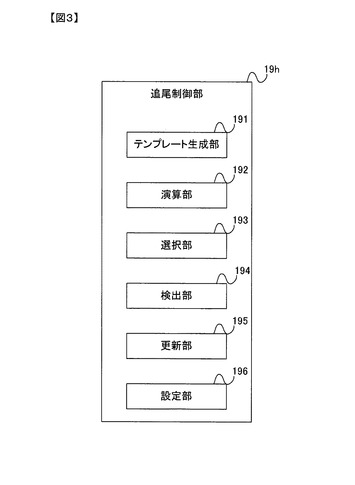
図3に示すように、追尾制御部19hは、画像追尾処理を行うために、テンプレート生成部191、演算部192、選択部193、検出部194、更新部195および設定部196を機能的に備える。テンプレート生成部191は、第2撮像素子16から出力された被写界画像信号を用いて、テンプレート画像を生成してメモリ19dに記憶させる。演算部192は、撮影周期ごとに繰り返し撮影される被写界画像とテンプレート画像との間で相関関係を演算する。選択部193は、演算部192による演算結果のうち、テンプレート画像との相関関係が最も高いことを示す演算結果を選択する。検出部194は、選択部193により選択された演算結果に基づいて、被写界画像の中からテンプレート画像と一致または類似する画像領域を検出(検索)する。更新部195は、テンプレート生成部191により生成されたテンプレート画像の更新処理を行う。設定部196はテンプレート画像と一致または類似する画像領域を検出するための探索領域を被写界画像内に設定するとともに、検出された一致または類似する画像領域を後述する追尾対象領域として設定する。なお、テンプレート生成部191、演算部192、選択部193、検出部194、更新部195および設定部196による処理の詳細については、説明を後述する。
【0022】
次に、一実施の形態の画像追尾動作を説明する。図5〜図9は一実施の形態の画像追尾動作を説明するための図、図10〜図12は一実施の形態の画像追尾処理を示すフローチャートである。ボディ駆動制御装置19は、第2撮像素子16により撮像した被写体画像のうち、ユーザが手動で追尾対象とする被写体(以後、追尾対象被写体)を指定するか、あるいはカメラが自動で追尾対象被写体を設定した後、操作部材20のレリーズボタンを半押しすると、被写体追尾処理を開始する。なお、以降の説明では、図5〜図9において水平方向をx軸、垂直方向をy軸とする座標系を用いる。
【0023】
レリーズボタンを全押しして撮影を行うとき以外は、クイックリターンミラー5が図1に破線で示す撮影光路内に設定されており、撮影レンズ8から入射した被写体光の一部は焦点板11上に結像される。そして、焦点板11上の被写界像はペンタダハプリズム13、プリズム17および結像レンズ18を介して第2撮像素子16へ導かれ、第2撮像素子16から被写界画像信号が繰り返し出力される。
【0024】
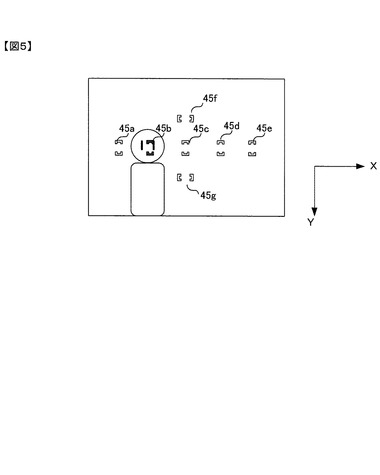
撮影レンズ8の撮影画面には複数の焦点検出エリアが設定されており、液晶表示素子12は焦点板11上の被写界像にエリアマークを重畳して、各焦点検出エリアの位置を表示する。この一実施の形態では、図5に示すように、撮影画面内の7カ所に焦点検出エリア45a〜45gが設定された例を示す。また、操作部材20の焦点検出エリア選択スイッチにより任意のエリアを選択すると、そのエリアのマークが点灯表示される。
【0025】
図5に示すように操作部材20の焦点検出エリア選択スイッチにより焦点検出エリア45cが選択され、この状態で操作部材20のレリーズボタンが半押しされると、焦点検出エリア45bが初回AFエリアとしてメモリ19dに記憶される。これにより、追尾対象被写体として初回AFエリア内の被写体が指定される。なお、ここでは撮影者が初回AFエリアを選択して追尾対象被写体を手動で指定する例を示すが、例えば自動的に被写体を認識する機能を備えたカメラでは被写体認識結果に基づいて初回AFエリアおよび追尾対象被写体を設定してもよい。
【0026】
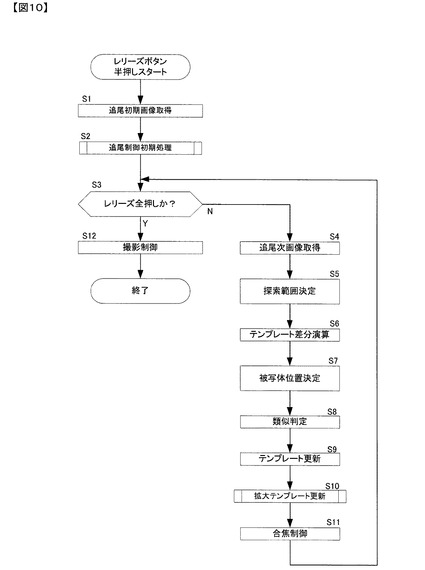
図10のステップS1において、素子制御回路19aは第2撮像素子16に追尾初期画像(画像追尾処理を開始して最初に取得する画像)を取得させる。第2撮像素子16により撮像された初期追尾画像の画像情報は、被写界画像信号として画素ごとにRGB値で表される。マイクロコンピューター19cは、第2撮像素子16から入力した被写界画像信号のRGB値に基づいて、被写界画像の色情報と輝度情報とを算出する。このとき、マイクロコンピューター19cは、第2撮像素子16に含まれる640×480個の画素40のそれぞれの画像情報を、たとえば隣接する8×8個の画素40の画像情報をまとめて1つのブロックとするブロック化を行う。この場合、マイクロコンピューター19cは、隣接する8×8個の画像情報(すなわちRGB値)を平均化あるいは合計することによりブロック化を行う。その結果、図4(b)に示すように、被写界画像の640×480個の画素40のそれぞれの画像情報は、80×60個のブロック41(図4(b)の太線で囲まれる範囲内)の画像情報として表される。なお、以後の説明においては、上記のブロック化された1つのブロックをブロック画素41と呼ぶ。また、図4(b)においては、全被写界画像のうちの一部を拡大して示している。
【0027】
上述したようにしてブロック化が行われると、第2撮像素子16により撮像された画像情報は、ブロック画素41ごとに以下の式(1)のようにRGB値で表される。
R[x,y]、G[x,y]、B[x,y],
x=1〜80、y=1〜60 ・・・(1)
【0028】
そして、マイクロコンピューター19cは、上記のブロック画素41ごとのRGB値に基づいて、各ブロック画素41の色情報と輝度情報とを算出する。ここで、色情報は、以下の(2)式に示すように、色の偏り具合を示す値であるRG、BGにより表される。また、輝度情報として画像を取得したときの露光時間T、ゲインG、色合成係数Kr、Kg、Kbに基づいて、以下の(2)式より算出されたLによって表される。
RG[x,y]=Log2(R[x,y])−Log2(G[x,y])
BG[x,y]=Log2(B[x,y])−Log2(G[x,y])
L[x,y]=Log2(Kr×R[x,y]+Kg×G[x,y]+Kb×B[x,y])−Log2(T)−Log2(G)
・・・(2)
【0029】
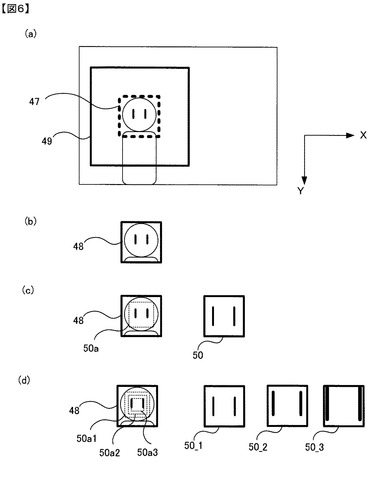
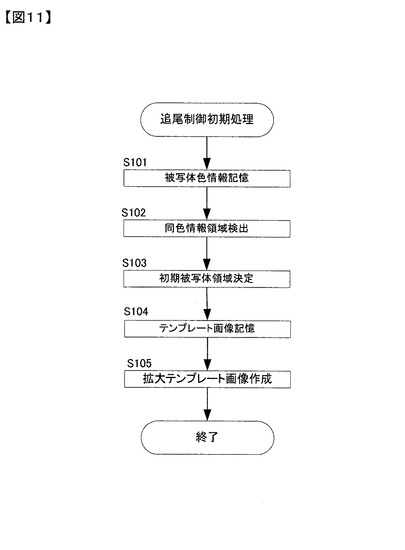
次に、ステップS2で追尾制御部19hは、図11に示す追尾制御初期処理を実行する。図11のステップS101において、追尾制御部19hのテンプレート生成部191は、追尾初期画像の中の撮影者が指定した位置(ここでは初回AFエリアである焦点検出エリア45b)の画像情報((2)式参照)を被写体色情報としてメモリ19dに記憶する。ステップS102では、図6(a)に示すように、テンプレート生成部191は、追尾初期画像の中の焦点検出エリア45b(図5参照)の位置周辺部において上記被写体色情報と同様な色情報を示す同色情報領域を検出する。
【0030】
ステップS103では、テンプレート生成部191は、上記同色情報領域を含む四角形の領域を初期の追尾被写体領域47とする。なお、ここでは被写体色情報に基づいて追尾被写体領域47を決定する例を示すが、処理の簡素化を図るために一律に4×4個のブロック画素41のように追尾被写体領域47のサイズを統一したり、あるいは撮影レンズ8の距離情報や被写体の像倍率に応じて追尾被写体領域47のサイズを決定してもよい。
【0031】
ステップS104では、テンプレート生成部191は、ステップS103で決定した追尾初期画像の追尾被写体領域47をテンプレート画像48としてメモリ19dに記憶する。図6(a)に示すように、追尾被写体領域47のサイズ(大きさ)をTmpSizeとすると、図6(b)に示すテンプレート画像48の色情報および輝度情報は以下の式(3)ように表される。なお、以降の説明においては、追尾初期画像に基づいて生成されたテンプレート画像48を初期テンプレート画像と呼ぶ。また、以降の各式において、変数tはテンプレート画像の種類を示す変数であり、t=0が初期テンプレート画像48に対応する。
Ref[t,RG,i,j]=RG[x+i,y+j]
Ref[t,BG,i,j]=BG[x+i,y+j]
Ref[t,L,i,j]=L[x+i,y+j]
t=0、i=1〜TmpSize、j=1〜TmpSize ・・・(3)
【0032】
ステップS105では、テンプレート生成部191は、初期テンプレート画像48に基づいて、拡大テンプレート画像50を作成する。図6(c)に示すように、この拡大テンプレート画像50は、初期テンプレート画像48の内部に含まれる内部画像領域50a(図6(c)の破線で囲まれた領域)が初期テンプレート画像48と同一のサイズに拡大された画像である。換言すると、拡大テンプレート画像50は、初期テンプレート画像48をズームアップした場合に得られる画像に相当する。このため、後述するように、被写体がカメラ1に接近してくる場合に、拡大テンプレート画像50によって追尾対象被写体を検出できる。
【0033】
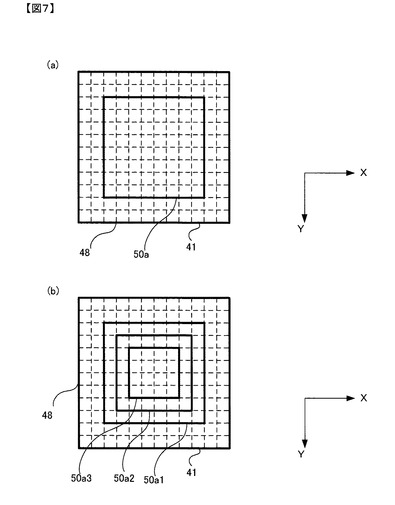
テンプレート生成部191は、拡大テンプレート50を作成する際に、まず、初期テンプレート画像48の内部を内部画像領域50aとして決定する。図7(a)においては、内部画像領域50aの一例として、初期テンプレート画像48の上下(y方向)についてそれぞれ2ブロック画素、左右(x方向)についてそれぞれ2ブロック画素ずつ内側の領域が決定された場合を示している。そして、テンプレート生成部191は、決定した内部画像領域50a(Sclup[cl,i,j])をメモリ19dに記憶する。なお、複数の内部画像領域50aを決定してもよい。図7(b)には、一例として、3種類の内部画像領域50a1〜50a3を決定した場合を示している。この場合、テンプレート生成部191は、内部画像領域50a1〜50a3のサイズが段階的に小さくなるように内部画像領域50a1〜50a3を決定する。
【0034】
上述のようにして内部画像領域50aを決定すると、テンプレート生成部191は、以下の式(4)に示す補間処理により内部画像領域50aを初期テンプレート画像48と同一のサイズに拡大して拡大テンプレート画像50(Ref[t,cl,i,j],t=1)を生成する。なお、変数tが1の場合には、拡大テンプレート画像50であることを示す。
Sclup[RG,s,u]=RG[x+s+n,y+u+n]
Sclup[BG,s,u]=BG[x+s+n,y+u+n]
Sclup[L,s,u]=L[x+s+n,y+u+n]
s=1〜拡大テンプレート画像のサイズ、u=1〜拡大テンプレート画像のサイズ、
n=初期テンプレート画像と内部画像領域との差分画素数 ・・・(4)
【0035】
なお、複数の内部画像領域50aを決定した場合(たとえば図7(b)の内部画像領域50a1〜50a3)、テンプレート生成部191は、それぞれの内部画像領域50aについて上述した補間処理により、初期テンプレート画像48と同一のサイズに拡大する。その結果、図6(d)に示すように、ズームアップの倍率が異なる複数種類の拡大テンプレート画像50_1、50_2、50_3が生成される。また、追尾対象の被写体が遠方に存在するため被写界画像内で小さな領域しか占有できない場合には、すなわち同色情報領域、被写体追尾領域47および初期テンプレート画像48のサイズが小さくなる。このような場合、テンプレート生成部191は、上記の方法によって初期テンプレート画像48の内部に内部画像領域50aを決定できない。したがって、テンプレート生成部191は、たとえば初期テンプレート画像48のサイズが4×4個のブロック画素41のような場合、初期テンプレート画像48と同一の画像情報を拡大テンプレート画像50として設定する。テンプレート生成部191は、拡大テンプレート画像50を生成するとメモリ19dに記憶する。
【0036】
以上で追尾制御初期処理を終了し、図10のステップS3へリターンする。リターン後の図10のステップS3において、マイクロコンピューター19cは操作部材20のレリーズボタンが全押しされたか否かを判別する。レリーズボタンが全押しされるまでの間、マイクロコンピューター19cは、ステップS4〜S11の処理を繰り返す。ステップS4では、次の撮影周期で第2撮像素子16により撮像された被写界画像(追尾次画像)について、マイクロコンピューター19cは、ステップS1と同様にして、画像情報R[x,y]、G[x,y]、B[x,y](x=1〜80、y=1〜60)を取得し、色情報RG[x,y],BG[x,y]および輝度情報L[x,y]を算出する。
【0037】
ステップS5では、設定部196は、テンプレート画像48と一致または類似する画像を探索するための領域(探索領域)49(図6(a))を設定する。ここでは、設定部196は、たとえば、追尾被写体領域47の上下左右方向にそれぞれ4ブロック画素分拡大したブロック画素範囲に含まれる領域を探索領域49として設定する。
【0038】
設定部196は、好ましくは追尾被写体領域47を中心にして探索領域49を設定する。追尾対象の被写体は今回検出された位置すなわち追尾被写体領域47を基点にして移動する。このため、設定部196によって追尾被写体領域47を中心にして探索領域49が設定されることにより、追尾対象の被写体を早く検出することができ、画像追尾の応答性を向上させることができる。なお、この探索領域49は縦横それぞれに所定個数のブロック画素を含む固定サイズの領域としてもよいし、追尾結果や追尾対象被写体の大きさに応じて変えるようにしてもよい。
【0039】
続くステップS6では追尾制御部19hの演算部192は、追尾演算処理を行う。演算部192は、追尾次画像の中の探索領域49から図6(a)に示す追尾被写体領域47と同じサイズの領域を順次切り出す。そして、演算部192は、切り出した画像と、図6(b)に示すテンプレート画像48とを、対応する画素ごとに相関を演算、すなわち画像情報の差分Diff[t(=0),sx,sy]を算出する。さらに、演算部192は、切り出した画像と、図6(c)に示す拡大テンプレート画像50とを、対応するブロック画素41ごとに相関を演算、すなわち画像情報の差分Diff[t(=1),sx,sy]を算出する。
【0040】
具体的には、演算部192は、探索領域49の始点位置を(x,y)としたとき、差分Diff[t,sx,sy]を次式(5)により算出する。
【数1】

【0041】
なお、(5)式におけるsx、syは、それぞれ切り出し画像の始点位置をずらす範囲(量)を示している。(5)式は以下の(1)、(2)の処理が行われていることを示している。
(1)探索領域49の中で追尾被写体領域47と同じサイズの領域を1ブロック画素ずつずらしながら切り出し画像を取得する。
(2)切り出した画像とテンプレート画像48との間および切り出した画像と拡大テンプレート画像50との間でブロック画素ごとの画像情報の差分Diffを求める。
【0042】
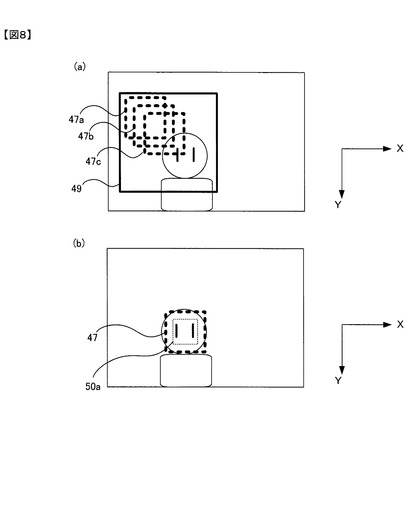
例えば、図8(a)に示すように探索領域49から順次切り出した画像(図8(a)においては、47a、47b、47c)と、テンプレート画像48とが順次比較され、それぞれの切り出し画像について差分Diffが算出される。同様に、探索領域49から順次切り出した画像(図8(a)の47a、47b、47c)と、拡大テンプレート画像50とが順次比較されて、それぞれの切り出し画像について差分Diffが算出される。そして、これらの差分Diffの内の最小の値を示す切り出し画像が、テンプレート画像48または拡大テンプレート画像50に最も類似している、類似度が高い画像となる。
【0043】
なお、図6(d)にて示したように、ズームアップの倍率が異なる複数種類の拡大テンプレート画像50_1、50_2、50_3が生成された場合については、演算部192は、変数tに、比較するテンプレート画像の種類の数を代入して上記の式(5)を演算する。この場合、演算部192は、1種類の初期テンプレート画像48と3種類の拡大テンプレート画像50_1、50_2、50_3とを合わせた数である4を変数tに代入する。式(5)を用いた演算により、演算部192は、生成されたテンプレート画像48および複数の拡大テンプレート画像50_1、50_2、50_3のそれぞれについて差分Diffを算出する。
【0044】
ステップ7においては、新しい追尾被写体位置を決定するための新追尾被写体位置決定処理を行う。演算部192により上記(5)式を用いて差分Diffが算出されると、選択部193は、複数の差分Diffの値のうち最も小さい値(最小差分値MinDiff)を選択する。最小差分値MinDiffが選択されると、検出部194は、最小差分値MinDiffとなるときの差分Diffの座標値(Mindx,Mindy)を検出する。そして、図8(b)に示すように、設定部196は、検出部194により検出された座標値(Mindx,Mindy)を中心として新たな追尾被写体領域47を設定する。換言すると、設定部196は、テンプレート画像48または拡大テンプレート画像50との類似度が最も高い切り出し領域を新たな追尾被写体領域47に設定する。
【0045】
検出部194は、さらに、最小差分値MinDiffを与える変数tが1であるか否かを判定する。変数tが1である場合には、検出部194は、カウンタのカウント数を1増やし、変数tが0の場合には、カウンタのカウント数を0にリセットする。このカウンタは、後述するテンプレート画像48を拡大テンプレート画像50に置換する際に、更新部195により参照される。
【0046】
ステップS8では、追尾制御部19hは、最小差分値MinDiffと、予め設定された類似閾値Dthとを比較することにより、ステップS7で決定された新しい追尾被写体領域47がテンプレート画像48または拡大テンプレート画像50と類似しているか否かの判定を行う。なお、類似閾値Dthは、通常の撮影シーンにおいて適切に類似判定が可能な値として設定されている。ステップS8の判定結果は、後述するステップS12における焦点調節の際に用いられる。
【0047】
ステップS9では、更新部195は、予め設定された更新閾値Upthを用いて、テンプレート画像48の更新処理の要否を判定する。更新閾値Upthは、通常の撮影シーンにおいて適切に類似判定が可能な値として設定されている。ステップS9において、新しい追尾被写体領域47とテンプレート画像48との類似度が高いと判定された場合に、テンプレート画像48の更新処理を行う。更新部195は、最小差分値MinDiffの値が更新閾値Upth以下の場合に、テンプレート画像48の更新処理が必要と判断する。本実施の形態では、更新部195は、元のテンプレート画像48の色情報や輝度情報などの画像情報の、たとえば80%に、新しい追尾被写体領域47の画像情報の20%を加えて、新しいテンプレート画像48を生成する。すなわち、更新部195は、更新処理が必要と初めて判定した場合には初期テンプレート画像48に更新処理を施して新たにテンプレート画像48を生成し、以後の処理では、順次、新たなテンプレート画像48に対して更新処理を施す。更新処理の演算は、以下の(6)式のように表すことができる。
Ref[0,RG,i,j]=0.8×Ref[0,RG,i,j]+0.2×RG[x+i−1,y+j−1]、
Ref[0,BG,i,j]=0.8×Ref[0,BG,i,j]+0.2×BG[x+i−1,y+j−1]、
Ref[0,L,i,j]=0.8×Ref[0,L,i,j]+0.2×L[x+i−1,y+j−1]、
i=1〜TmpSize、j=1〜TmpSize、x、yは新たな追尾被写体領域47の位置 ・・・(6)
【0048】
テンプレート画像48の更新処理の結果、元のテンプレート画像48の画像情報に対して、最新の画像情報が少しずつ追加されることにより更新される。このため、何らかの原因による追尾被写体の変化(たとえば被写体の顔の向きの変化など)の影響を抑制して被写体追尾の信頼性を向上させることができる。なお、元のテンプレート画像48の画像情報の割合と新しい追尾被写体領域47の画像情報の割合とは最小差分値MinDiffの値に応じて可変にしてもよい。
【0049】
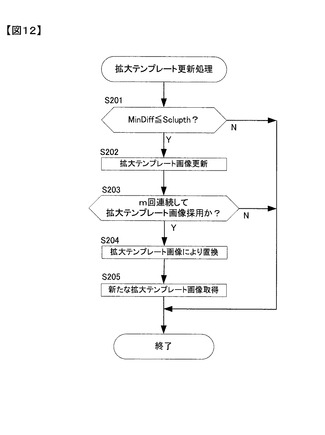
ステップS10において、更新部195は、図12に示す拡大テンプレート画像50の更新処理を行う。ステップS201では、予め設定された拡大更新閾値Sclupthを用いて、拡大テンプレート画像50の更新処理の要否を判定する。拡大更新閾値Sclupthは、通常の撮影シーンにおいて適切に類似判定が可能な値として設定されている。更新部195は、最小差分値MinDiffの値が拡大更新閾値Sclupth以下の場合に、拡大テンプレート画像50の更新処理が必要と判断する。
【0050】
続くステップS202では、更新部195は、上述したテンプレート画像48の更新処理の場合と同様にして、拡大テンプレート画像50を更新する。すなわち、更新部195は、元の拡大テンプレート画像50の色情報や輝度情報などの画像情報の、たとえば80%に、新しい追尾被写体領域47の画像情報の20%を加えることにより新たな拡大テンプレート画像50を生成する。なお、ステップS2において、初期テンプレート画像48のサイズが小さく、初期テンプレート画像48と同一の画像を拡大テンプレート画像50として設定した場合には、更新部195は、新しい追尾被写体領域47の画像情報を加える割合を上記の20%よりも増やして、新しい追尾被写体領域47の画像情報をたとえば40%加えて新たな拡大テンプレート画像50を生成する。
【0051】
ステップS203では、更新部195は、撮影周期ごとに上記の処理を繰り返す間に、拡大テンプレート画像50で検出された追尾被写体の位置を新たな追尾被写体領域47として設定した回数が、連続してm回となったか否かを判定する。すなわち、更新部195は、追尾被写体がカメラ1に接近しているために、被写界における追尾被写体が大きくなっているか否かを判定する。この場合、更新部195は、カウンタによるカウント数がmであるか否かを判定する。カウント数がmではない場合には、以下の処理を行わずに拡大テンプレート画像更新処理を終了する。
【0052】
カウント数がmの場合には、更新部195は、ステップS204において、以下の式(7)を用いて、テンプレート画像48を拡大テンプレート画像50によって置換する。
Ref[0,RG,i,j]=Ref[1,RG,i,j]
Ref[0,BG,i,j]=Ref[1,BG,i,j]
Ref[0,L,i,j]=Ref[1,L,i,j]
なお、i=1〜TmpSize、j=1〜TmpSize ・・・(7)
【0053】
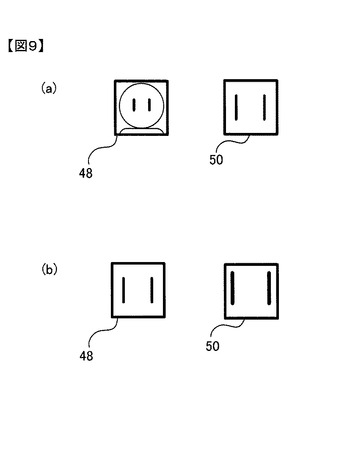
カウント数がm未満の場合には、追尾制御部19hは、図9(a)に示すテンプレート画像48と拡大テンプレート画像50とを用いて追尾被写体検出処理を行っていた。カウント数がmに達し更新部195が上記の置換処理を行うと、追尾制御部19hは、次回以降の被写体位置決定処理において、図9(a)に示す拡大テンプレート画像50を図9(b)に示すテンプレート画像48として用いる。なお、図9(a)に示すテンプレート画像48と拡大テンプレート画像50とはそれぞれ図6(b)に示すテンプレート画像48と図6(c)に示す拡大テンプレート画像50と同一のものである。
【0054】
ステップS204でテンプレート画像48の置換処理を行った場合には、ステップS205において、更新部195は、新たな拡大テンプレート画像50を生成する。すなわち、更新部195は、新たな追尾対象領域47に内部画像領域50aを決定して、補間処理によりテンプレート画像48と同一のサイズとなるように拡大することにより拡大テンプレート画像50を生成する。その結果、図8(b)に示す新たな追尾対象領域47の内部の破線で囲んだ内部画像領域50aに対応する拡大テンプレート画像50(図9(b))が生成される。換言すると、更新部195は、カウンタのカウント数がmの場合には、新たな追尾被写体領域47の位置を基準として拡大テンプレート画像50を生成する。
【0055】
以上で拡大テンプレート画像50の更新処理を終了し、図10のステップS11へリターンする。リターン後のステップS11では、焦点検出演算部19fは、ステップS7における被写体位置決定処理で決定した新しい追尾被写体領域47を用いて焦点制御を行う。この場合、新しく決定された追尾被写体領域47がテンプレート画像48または拡大テンプレート画像50と類似していると追尾制御部19hによって判定された場合(ステップS8)は、焦点検出演算部19fは、新しい追尾被写体領域47内に含まれる追尾対象に対して合焦制御を行う。焦点検出演算部19fは、新しい追尾被写体領域47内に焦点検出エリア45a〜45gの少なくとも一つが含まれる場合には、新しい追尾被写体領域47内に含まれる焦点検出エリア45a〜45gで検出されたデフォーカス量のうち最も小さいものを採用し、そのデフォーカス量に基づいて撮影レンズ8の焦点調節を行う。新しい追尾被写体領域47内に焦点検出エリア45a〜45gが含まれない場合には、焦点検出演算部19f新しい追尾被写体領域47との距離、または前回の追尾結果で採用された焦点検出エリア45a〜45gとの距離の少なくとも一方に基づいて採用する焦点検出エリア45a〜45gを決定してもよい。新しく決定された追尾被写体領域47がテンプレート画像48または拡大テンプレート画像50と類似していないと追尾制御部19hによって判定された場合(ステップS8)は、焦点検出演算部19fは、前回の処理で検出されたデフォーカス量を用いて焦点調節を行う。上記処理が終了するとステップS3へ戻る。
【0056】
ステップS3で操作部材20のレリーズボタンの全押し操作が検出されるとステップS12へ進み、マイクロコンピューター19cは、撮影制御を実行する。なお、撮像制御に際しては、露出演算部19eはステップS7で決定した新しい追尾被写体領域47の輝度情報に基づいて露出演算を行い、絞り値とシャッター速度を算出する。これらの露出値にしたがって、マイクロコンピューター19cはシャッター7および絞り21を駆動制御し、第1撮像素子4に撮像を行わせる。
【0057】
以上で説明した実施の形態によれば、以下の作用効果が得られる。
(1)第2撮像素子16は、撮影レンズ8により結像される像を繰り返し撮像して、被写界画像を生成する。テンプレート生成部191は、被写界画像に含まれる追尾対象領域である追尾被写体領域47に基づいて、少なくとも1つの拡大テンプレート画像50を含む複数のテンプレート画像48、50を生成する。演算部192は、被写界画像の内部の探索領域49と、テンプレート生成部191により生成された複数のテンプレート画像48、50のそれぞれとの間の相関関係を演算する。選択部193は、演算部192による複数のテンプレート画像48,50のそれぞれに対する演算結果を比較し、比較結果に基づいて、演算結果を選択する。検出部194は、選択部193により選択された演算結果に基づいて、被写界画像における追尾対象被写体の位置を検出する。上記の拡大テンプレート画像50を生成する際には、テンプレート生成部191は、追尾対象領域47に含まれる画像領域を補間処理により拡大し、拡大された画像領域に基づいて、拡大テンプレート画像50を生成するようにした。具体的には、テンプレート生成部191は、追尾被写体領域47の画像情報に基づいて拡大テンプレート画像50とは異なる初期テンプレート画像48を生成する。そして、テンプレート生成部191は、初期テンプレート画像48の内部に内部画像領域50aを設定し、設定された内部画像領域50aを初期テンプレート画像48の大きさとなるように補間処理により拡大することによって拡大テンプレート画像50を生成するようにした。したがって、拡大テンプレート画像50は、初期テンプレート画像48をズームアップした場合に得られる画像に相当するので、追尾対象被写体がカメラ1に接近してくる場合であっても、拡大テンプレート画像50によって追尾対象を検出できる。
【0058】
(2)設定部196は、検出部194により検出された追尾対象被写体の位置に基づいて、新たな追尾対象領域47を設定する。そして、演算部192による演算結果に基づいて、複数のテンプレート画像48、50を更新すると判定した場合、更新部195は、設定部196により設定された新たな追尾対象領域47の画像情報を用いて、複数のテンプレート画像48、50を更新するようにした。したがって、更新処理の結果、元のテンプレート画像48または拡大テンプレート画像50の画像情報に対して、最新の画像情報が少しずつ追加されることにより更新される。このため、何らかの原因による追尾被写体の変化(たとえば被写体の顔の向きの変化など)の影響を抑制して被写体追尾の信頼性を向上させることができる。
【0059】
(3)演算部192は、拡大テンプレート画像50の画像情報と、探索領域49内の画像情報との差分値を演算し、更新部195は、演算部192により算出された差分値に応じて拡大テンプレート画像50の更新の要否を判定するようにした。この場合、更新部195は、新たな追尾対象領域47内の画像情報と、拡大テンプレート画像50の画像情報とを所定の割合で合成して拡大テンプレート画像50を更新するようにした。したがって、最小差分値MinDiffの値が拡大更新閾値Sclupth以下、すなわち類似度が高い場合には、拡大テンプレート画像50に最新の画像情報が加わる。その結果、次回以降の処理において、拡大テンプレート画像50による追尾対象被写体の検出精度を向上させることができる。さらに、上記(2)のように、拡大テンプレート画像50の画像情報に対して、最新の画像情報が少しずつ追加されることにより更新されるので、何らかの原因による追尾被写体の変化の影響を抑制して被写体追尾の信頼性を向上させることができる。
【0060】
(4)テンプレート生成部191は、初期テンプレート画像48内に内部画像領域50aを設定できない場合には、初期テンプレート画像48の画像情報と同一の画像情報を用いて拡大テンプレート画像50を生成する。そして、テンプレート生成部191により初期テンプレート画像48の画像情報と同一の画像情報を用いて拡大テンプレート画像50が生成された場合には、更新部195は拡大テンプレート画像50の画像情報に対して新たな追尾対象領域47の画像情報を合成する割合を高くするようにした。したがって、初期テンプレート画像48と同一の拡大テンプレート画像50を用いる場合には、拡大テンプレート画像50を早い段階の更新処理で初期テンプレート画像48をズームアップした場合に相当する画像に更新できる。その結果、追尾対象被写体がカメラ1に接近してくる場合であっても、拡大テンプレート画像50によって追尾対象を検出できる。
【0061】
(5)選択部193により連続して所定の回数(m回)、拡大テンプレート画像50に対する演算結果が選択された場合には、更新部195は、新たな追尾対象領域47内の画像情報に基づいて新たな拡大テンプレート画像50を生成するようにした。さらに、更新部195は、新たな拡大テンプレート画像50を生成する前の拡大テンプレート画像50の画像情報を新たなテンプレート画像48として置換するようにした。したがって、最新の追尾対象領域47の画像情報を用いて拡大テンプレート画像50を生成し直すので、連続して拡大テンプレート画像50の演算結果が選択されている場合、すなわち追尾対象被写体がカメラ1に対して相対的に接近している場合であっても、追尾対象被写体を検出し続けることができる。
【0062】
(6)選択部193は、複数のテンプレート画像48,50のそれぞれに対応する複数の演算結果のうち、テンプレート画像48,50と探索領域49との間の類似度が最も高いことを示す演算結果を選択するようにした。具体的には、演算部192は、複数のテンプレート画像48,50内の画像情報のそれぞれと、探索領域49の画像情報との差分値を演算し、選択部193は、演算部192により算出された差分値が最小の場合に、類似度が最も高いと判定するようにした。したがって、複数のテンプレート画像48、50を用いたテンプレートマッチングを行った場合であっても、誤検出等の発生を抑制して追尾精度を維持できる。
【0063】
以上で説明した実施の形態の撮像装置1を以下のように変形できる。
(1)更新部195は初期テンプレート画像48を更新しなくてもよい。この場合、更新部195は、ステップS9で更新処理を行うと判定すると、初期テンプレート画像48をコピーして複製テンプレート画像を生成する。そして、更新部195は、複製テンプレート画像に対して上述した更新処理を施して、新たにテンプレート画像(更新テンプレート画像)を生成する。2回目以降に更新処理を行うと判定した場合、更新部195は、更新テンプレート画像に対して更新処理を施す。すなわち、更新部195は、一連の処理において、更新テンプレート画像および/または拡大テンプレート画像50に対して更新処理を行う。そして、追尾制御部19hは、初期テンプレート画像48と、更新テンプレート画像と、拡大テンプレート画像50とを用いて、探索領域49内で上述した追尾演算処理を行えばよい。この結果、初期テンプレート画像48を更新することなく保持し続けているので、追尾対象被写体がカメラ1に対して再び遠ざかったような場合等には、再度初期テンプレート画像48を用いて追尾対象被写体を検出できる。
【0064】
さらに加えて、拡大テンプレート画像50で検出された位置を新たな追尾被写体領域47として設定した回数が、連続して所定回数となった場合には、追尾制御部19hは、初期テンプレート画像48で検出された位置が新たな追尾被写体領域47として採用されにくくなるように処理を加える。この場合、上記のカウンタによるカウント数がnのときには、演算部192は初期テンプレート画像48と探索領域49との差分Diff[0,sx,sy]の値に所定の係数kを加算することにより、初期テンプレート画像45の演算結果が選択部193により選択されにくくなるように補正を施す。すなわち、差分Diff[0,sx,sy]の値を大きくすることにより、初期テンプレート画像48による演算結果が最小差分値MinDiffとして採用されにくくなる。この結果、追尾対象の被写体がカメラ1に接近している場合、すなわち被写界画像中の追尾対象が大きくなった場合に、追尾対象とは異なる背景の被写体(すなわち小さな被写体)を追尾対象として誤検出することを防ぐことができる。
【0065】
さらに、拡大テンプレート画像50で検出された位置を新たな追尾被写体領域47として設定した回数が、連続して所定回数となった場合には、追尾制御部19hは、初期テンプレート画像48で検出された位置が選択部193によって選択されることを禁止してもよい。この場合、初期テンプレート画像48と拡大テンプレート画像50の2つを用いて追尾処理をする場合であれば、上記のカウンタによるカウント数がnのときには、選択部193は、拡大テンプレート画像50と探索領域49との差分Diff[1,sx,sy]の値のみを選択する。
【0066】
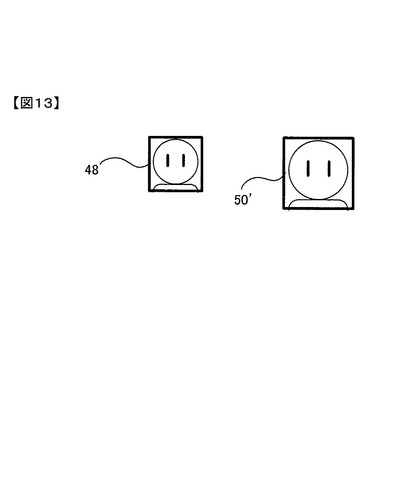
(2)テンプレート生成部191は、初期テンプレート画像48内の内部画像領域50aを補間処理により拡大して拡大テンプレート画像50を生成するものに代えて、初期テンプレート画像48を補間処理により拡大して拡大テンプレート画像を生成してもよい。すなわち、図13に示すように、テンプレート生成部191は、初期テンプレート画像48の画像情報がズームアップされた拡大テンプレート画像50’を生成する。
【0067】
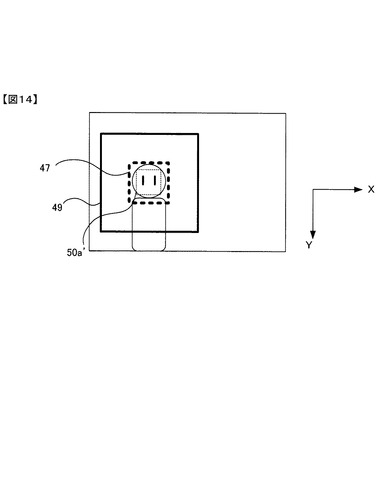
(3)テンプレート生成部191は、初期テンプレート画像48の内部画像領域50aから拡大テンプレート画像50を生成するものに代えて、被写体領域47の画像情報から拡大テンプレート画像50を生成してもよい。この場合、図14に示すように、テンプレート生成部191は、被写界画像内に設定された被写体追尾領域47の内部に、内部画像領域50a’を設定する。そして、テンプレート生成部191は、内部画像領域50a’を補間処理により拡大して拡大テンプレート画像50を生成すればよい。
【0068】
(4)交換レンズ3のレンズ駆動制御装置22からレンズマウント部の接点23を介して入力されたレンズ情報に基づいて、選択部193は、拡大テンプレート画像50を用いた演算結果を優先して演算してもよい。レンズ情報に基づいて、交換レンズ3がズームアップされている、または被写体の距離が近づいていると判定された場合、すなわち撮影画面内で追尾被写体の大きさが大きくなる場合には、選択部193は拡大テンプレート画像50を用いた演算結果を優先して選択する。優先する方法としては、拡大テンプレート画像50の演算結果の差分値が類似閾値以内であれば他のテンプレート画像の結果によらずに拡大テンプレート画像50の結果を選択すればよい。または、拡大テンプレート画像50以外の演算結果に重みを付けたうえで、最も差分値が小さい結果を選択すればよい。この結果、被写界画像中の追尾対象が大きくなった場合に、追尾対象とは異なる背景の被写体(すなわち小さな被写体)を追尾対象として誤検出することを防ぐことができる。
【0069】
(5)検出部194は、最小差分値MinDiffを与える変数tが1のときにカウンタのカウント数を1増やすものに代えて、焦点検出演算部19fによる合焦制御の結果に基づいて、カウンタのカウント数を1増やしてもよい。この場合、焦点検出演算部19fが前回のデフォーカス量と今回のデフォーカス量とに基づいて、追尾対象被写体が撮影レンズ8の光軸方向に沿って、カメラ1に接近していると判定した場合、検出部194は、カウンタのカウント数を1増やす。そして、カウント数がmの場合には、選択部193は拡大テンプレート画像50を用いた演算結果を選択すればよい。この結果、追尾対象の被写体がカメラ1に接近している場合、すなわち被写界画像中の追尾対象が大きくなった場合に、追尾対象とは異なる背景の被写体(すなわち小さな被写体)を追尾対象として誤検出することを防ぐことができる。
【0070】
(6)演算部192は、差分Diffを算出するものに限らない。演算部192は、テンプレート画像48の画像情報および拡大テンプレート画像50の画像情報のそれぞれと、切り出し画像の画像情報との間で加算や、除算等の四則演算を行ってもよいし、最小二乗法等を用いてもよい。この場合も、選択部193は、値が最小となる演算結果、すなわち類似度が最大であることを示す演算結果を選択する。
【0071】
また、本発明の特徴を損なわない限り、本発明は上記実施の形態に限定されるものではなく、本発明の技術的思想の範囲内で考えられるその他の形態についても、本発明の範囲内に含まれる。説明に用いた実施の形態および変形例は、それぞれを適宜組合わせて構成しても構わない。
【符号の説明】
【0072】
1 撮像装置、 16 第2撮像素子、
19 ボディ駆動制御装置、 19c マイコン、
19f 焦点検出演算部、 19h 追尾制御部、
23 接点、 191 テンプレート生成部、
192 演算部、 193 選択部、
194 検出部、 195 更新部、
196 設定部
【技術分野】
【0001】
本発明は、画像追尾装置に関する。
【背景技術】
【0002】
従来から、移動被写体を撮影する際に、画面内の指示部分の被写体像をテンプレート画像として取得し、繰り返し撮影する画像の中でテンプレート画像と類似した被写体像の位置を検索(テンプレートマッチング)し、画面内を横方向へ移動する被写体を追尾する画像追尾装置が知られている。たとえば特許文献1では、複数のテンプレート画像を用いてテンプレートマッチングを行うことによって、追尾精度を向上させる技術が開示されている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2008−187331号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、相対的に接近する移動被写体の画像上でのサイズは大きくなるので、テンプレート画像と類似した被写体像の検出精度が低下して、被写体を追尾できなくなるという問題がある。
【課題を解決するための手段】
【0005】
請求項1に記載の発明による画像追尾装置は、結像光学系により結像される像を繰り返し撮像して、被写界画像を生成する撮像手段と、被写界画像に含まれる追尾対象領域に基づいて、少なくとも1つの第1テンプレート画像を含む複数のテンプレート画像を生成する生成手段と、被写界画像の内部の探索領域画像と、生成手段により生成された複数のテンプレート画像のそれぞれとの間の相関関係を演算する演算手段と、演算手段による複数のテンプレート画像のそれぞれに対する演算結果を比較し、比較結果に基づいて、演算結果を選択する選択手段と、選択手段により選択された演算結果に基づいて、被写界画像における追尾対象の画像の位置を検出する検出手段とを備え、生成手段は、追尾対象領域に含まれる画像領域を補間処理により拡大し、拡大された画像領域に基づいて、第1テンプレート画像を生成することを特徴とする。
請求項13に記載の発明による画像追尾装置は、結像光学系により結像される像を繰り返し撮像して、被写界画像を生成する撮像手段と、被写界画像に基づいて、少なくとも1つの第1テンプレート画像を含む複数のテンプレート画像を生成する生成手段と、被写界画像における探索領域画像と、生成手段により生成された複数のテンプレート画像のそれぞれとの間の相関関係を演算する演算手段と、結像光学系の撮影距離に関する情報を入力する入力手段と、入力手段により入力された撮影距離に関する情報に基づいて、追尾対象が相対的に接近していることを判定する判定手段と、判定手段により追尾対象が接近していると判定された場合には、演算手段による複数のテンプレート画像のそれぞれに対する演算結果のうち、第1テンプレート画像に対する演算結果を優先して選択し、判定手段により追尾対象の接近が判定されない場合には、演算手段による演算結果のうち第1テンプレート画像とは異なるテンプレート画像による演算結果を選択する選択手段と、選択手段により選択された演算結果に基づいて、被写界画像における追尾対象の画像の位置を検出する検出手段と備え、生成手段は、被写界画像に含まれる追尾対象領域を決定し、追尾対象領域に含まれる画像領域を補間処理により拡大し、拡大された画像領域に基づいて、第1テンプレート画像を生成することを特徴とする。
請求項14に記載の発明による画像追尾装置は、結像光学系により結像される像を繰り返し撮像して、被写界画像を生成する第1撮像手段と、被写界画像に基づいて、少なくとも1つの第1テンプレート画像を含む複数のテンプレート画像を生成する生成手段と、被写界画像における探索領域画像と、生成手段により生成された複数のテンプレート画像のそれぞれとの間の相関関係を演算する演算手段と、結像光学系の焦点状態を演算して、焦点調節を行う焦点調節手段と、焦点調節手段による演算結果に基づいて、追尾対象が結像光学系の光軸方向に対して接近しているか否かを判定する判定手段と、判定手段により追尾対象が接近していると判定された場合には、演算手段による複数のテンプレート画像のそれぞれに対する演算結果のうち、第1テンプレート画像に対する演算結果を優先して選択し、判定手段により追尾対象の接近が判定されない場合には、演算手段による演算結果のうち第1テンプレート画像とは異なるテンプレート画像による演算結果を選択する選択手段と、選択手段により選択された演算結果に基づいて、被写界画像における追尾対象の画像の位置を検出する検出手段と備え、生成手段は、被写界画像に含まれる追尾対象領域を決定し、追尾対象領域に含まれる画像領域を補間処理により拡大し、拡大された画像領域に基づいて、第1テンプレート画像を生成することを特徴とする。
【発明の効果】
【0006】
本発明によれば、追尾対象領域に含まれる画像領域を拡大した第1テンプレート画像を少なくとも1つ含む複数のテンプレート画像の演算結果に基づいて、追尾対象の画像の位置を検出できる。
【図面の簡単な説明】
【0007】
【図1】一実施の形態の画像追尾装置を備えた撮像装置の構成を示す横断面図
【図2】一実施の形態の画像追尾装置を備えた撮像装置の構成を示すブロック図
【図3】実施の形態の追尾制御部が備える機能を示すブロック図
【図4】第2撮像素子の構成および被写界画像を例示する平面図
【図5】一実施の形態の画像追尾方法を説明するための図
【図6】一実施の形態の画像追尾方法を説明するための図
【図7】一実施の形態の画像追尾方法を説明するための図
【図8】一実施の形態の画像追尾方法を説明するための図
【図9】一実施の形態の画像追尾方法を説明するための図
【図10】一実施の形態の画像追尾処理を示すフローチャート
【図11】追尾制御初期処理を示すフローチャート
【図12】拡大テンプレート更新処理を示すフローチャート
【図13】変形例における拡大テンプレート画像の生成処理を説明するための図
【図14】変形例における拡大テンプレート画像の生成処理を説明するための図
【発明を実施するための形態】
【0008】
撮影画面内に設定された複数の焦点検出エリアにおいて撮影レンズの焦点調節状態(この一実施の形態ではデフォーカス量)を検出し、いずれかのエリアのデフォーカス量に基づいて撮影レンズを合焦駆動する自動焦点調節(AF)機能と、撮影画像の中の追尾対象の被写体の画像をテンプレート画像(基準画像)として記憶し、繰り返し撮像される画像の中でテンプレート画像と同一または類似した画像の位置を検索しながら(テンプレートマッチング)追尾対象の被写体を追尾する画像追尾機能とを備え、AF機能と画像追尾機能により撮影レンズを駆動しながら追尾対象を追尾する画像追尾装置を備えた撮像装置(一眼レフデジタルスチルカメラ)の一実施の形態を説明する。
【0009】
図1は、一実施の形態の画像追尾装置を備えた撮像装置(一眼レフデジタルスチルカメラ)1の構成を示す。なお、図1では画像追尾機能とは直接関係のないカメラの機器および回路についての図示と説明を省略する。一実施の形態のカメラ1では、撮影レンズ8、絞り21等を有する交換レンズ3がカメラ本体2に着脱可能に装着される。カメラ本体2には被写界像を撮像して画像を記録するための第1撮像素子4が設けられる。この第1撮像素子4はCCDやCMOSなどにより構成することができる。撮影時にはクイックリターンミラー5およびサブミラー6が実線で示す撮影光路外の位置に退避してシャッター7が開放され、撮影レンズ8により第1撮像素子4の受光面に被写体像が結像される。
【0010】
カメラ本体2の底部には、撮影レンズ8の焦点調節状態を検出するための焦点検出光学系9と測距素子10が設けられている。この一実施の形態では、瞳分割型位相差検出方式による焦点検出方法を採用した例を示す。焦点検出光学系9は、撮影レンズ8を通過した対の焦点検出用光束を測距素子10の受光面へ導き、対の光像を結像させる。測距素子10は例えば対のCCDラインセンサーを備え、対の光像に応じた焦点検出信号を出力する。撮影前にはクイックリターンミラー5およびサブミラー6が破線で示すような撮影光路内の位置に設定されており、撮影レンズ8からの対の焦点検出用光束はクイックリターンミラー5のハーフミラー部を透過し、サブミラー6により反射されて焦点検出光学系9および測距素子10へ導かれる。
【0011】
カメラ本体2の上部にはファインダー光学系が設けられている。撮影前にはクイックリターンミラー5およびサブミラー6が破線で示す位置にあり、撮影レンズ8からの被写体光の一部はクイックリターンミラー5に反射されて焦点板11へ導かれ、焦点板11上に被写体像が結像する。液晶表示素子12は、焦点板11上に結像された被写界像に焦点検出エリアマークなどの情報を重畳表示するとともに、被写界像外の位置に露出値などの種々の撮影情報を表示する。焦点板11上の被写界像はペンタダハプリズム13および接眼レンズ14を介して接眼窓15へ導かれ、撮影者が被写界像を視認することができる。
【0012】
また、カメラ本体2上部のファインダー光学系には、被写体追尾や測光のために被写界像を撮像する第2撮像素子16が設けられる。焦点板11に結像した被写界像は、ペンタダハプリズム13、プリズム17および結像レンズ18を介して第2撮像素子16の受光面に再結像される。
【0013】
図4(a)は第2撮像素子16の詳細な構成を示す正面図である。図4(a)においては水平方向をx軸、垂直方向をy軸とする座標系を用いる。第2撮像素子16は、マトリクス状に配列された複数の画素(光電変換素子)40(たとえば、横640個×縦480個の画素)を備えている。なお、図4(a)においては、図示の都合上、画素40の個数は上記横640個×縦480個よりも少ない個数で示している。さらに、各画素40にはそれぞれ赤R、緑G、青Bの原色フィルターが設けられている。これにより、各画素40ごとに被写界画像のRGB信号(被写界画像信号)を後述するボディ駆動制御装置19(図2)に出力することができる。詳細を後述するが、この第2撮像素子16により撮像された被写界画像信号に基づいて、ボディ駆動制御装置19によって追尾制御と露出演算とが行われる。なお、ボディ駆動制御装置19は、追尾制御と露出演算は第1撮像素子4による撮像により出力された被写界画像信号に基づいて行うこととしてもよい。
【0014】
カメラ本体2にはまた、ボディ駆動制御装置19、操作部材20などが設けられる。ボディ駆動制御装置19は、詳細を後述するマイクロコンピューターとメモリ、A/D変換器などの周辺部品から構成され、カメラ1の種々の制御と演算を行う。操作部材20には、レリーズボタン、焦点検出エリア選択スイッチ、撮影モード選択スイッチなどのカメラ1を操作するためのスイッチやセレクターが含まれる。
【0015】
交換レンズ3には、ズーミングレンズ8a、フォーカシングレンズ8b、絞り21、レンズ駆動制御装置22などが設けられる。なお、この一実施の形態では撮影レンズ8をズーミングレンズ8a、フォーカシングレンズ8bおよび絞り21で代表的に表すが、撮影レンズ8の構成は図1に示す構成に限定されない。レンズ駆動制御装置22は図示しないマイクロコンピューターとメモリ、駆動回路、アクチュエーターなどの周辺部品から構成され、レンズ8a、8bおよび絞り21の駆動制御とそれらの位置検出を行う。レンズ駆動制御装置22に内蔵されるメモリには、交換レンズ3の焦点距離や開放絞り値などのレンズ情報が記憶されている。
【0016】
ボディ駆動制御装置19とレンズ駆動制御装置22はレンズマウント部の接点23を介して通信を行う。この通信によって、ボディ駆動制御装置19はレンズ駆動制御装置22へレンズ駆動量や絞り値などの情報を送信し、レンズ駆動制御装置22はボディ駆動制御装置19へレンズ情報や絞り情報を送信する。
【0017】
図2はボディ駆動制御装置19の詳細な構成を示す。なお、画像追尾機能とは直接関係のない制御機能については図示と説明を省略する。ボディ駆動制御装置19は素子制御回路19a、A/D変換器19b、マイクロコンピューター19c、メモリ19dなどを備えている。素子制御回路19aは第2撮像素子16の電荷の蓄積と読み出しを制御する。A/D変換器19bは、第2撮像素子16から出力されるアナログ画像信号をデジタル画像信号に変換する。撮影者により操作部材20のレリーズボタンが半押しされると半押しスイッチ(不図示)がオンし、図1に示すように、撮影レンズ8を通過した被写体光の一部は破線で示すクイックリターンミラー5により反射され、ペンタダハプリズム13、プリズム17および結像レンズ18を介して第2撮像素子16へ導かれる。レリーズボタンが半押しされている間、第2撮像素子16により繰り返し周期的に被写界画像を撮像することができる。
【0018】
マイクロコンピューター19cは、ソフトウエア形態により露出制御部19e、焦点検出演算部19f、レンズ駆動量演算部19gおよび追尾制御部19hを構成する。メモリ19dは、画像追尾用のテンプレート画像やデフォーカス量などの情報、撮影レンズ8の焦点距離、開放F値、絞り値、像ズレ量からデフォーカス量への変換係数などのレンズ情報などを記憶する。
【0019】
露出制御部19eは、第2撮像素子16により撮像した画像信号に基づいて露出値を演算する。焦点検出演算部19fは、測距素子10から出力される対の光像に応じた焦点検出信号に基づいて撮影レンズ8の焦点調節状態、ここではデフォーカス量を検出する。なお、詳細を後述するが、撮影レンズ8の撮影画面内には複数の焦点検出エリアが設定されており、測距素子10は焦点検出エリアごとに対の光像に応じた焦点検出信号を出力し、焦点検出演算部19fは焦点検出エリアごとに対の光像に応じた焦点検出信号に基づいてデフォーカス量を検出する。撮影者により操作部材20のレリーズボタンが半押しされると半押しスイッチ(不図示)がオンし、図1に示すように、撮影レンズ8を通過した被写体光の一部は破線で示すクイックリターンミラー5のハーフミラー部を通ってサブミラー6および焦点検出光学系9を介して測距素子10へ導かれ、焦点検出演算部19fにより焦点検出演算が行われる。レンズ駆動量演算部19gは検出されたデフォーカス量をレンズ駆動量に変換する。なお、焦点調節状態の検出は、レリーズボタンが半押しされている間、繰り返し周期的に行われる。
【0020】
追尾制御部19hは、画像追尾動作(処理)を行う。すなわち、追尾制御部19hは、第2撮像素子16により撮像した被写界像の内、撮影者が手動で指定した追尾対象位置、あるいはカメラ1が自動で設定した追尾対象位置に対応する画像をテンプレート画像(基準画像)としてメモリ19dに記憶させる。そして、追尾制御部19hは、撮影周期ごとに第2撮像素子16により繰り返し撮影される被写界画像の中からテンプレート画像と一致または類似する画像領域を検索することによって対象の位置を認識する。
【0021】
図3に示すように、追尾制御部19hは、画像追尾処理を行うために、テンプレート生成部191、演算部192、選択部193、検出部194、更新部195および設定部196を機能的に備える。テンプレート生成部191は、第2撮像素子16から出力された被写界画像信号を用いて、テンプレート画像を生成してメモリ19dに記憶させる。演算部192は、撮影周期ごとに繰り返し撮影される被写界画像とテンプレート画像との間で相関関係を演算する。選択部193は、演算部192による演算結果のうち、テンプレート画像との相関関係が最も高いことを示す演算結果を選択する。検出部194は、選択部193により選択された演算結果に基づいて、被写界画像の中からテンプレート画像と一致または類似する画像領域を検出(検索)する。更新部195は、テンプレート生成部191により生成されたテンプレート画像の更新処理を行う。設定部196はテンプレート画像と一致または類似する画像領域を検出するための探索領域を被写界画像内に設定するとともに、検出された一致または類似する画像領域を後述する追尾対象領域として設定する。なお、テンプレート生成部191、演算部192、選択部193、検出部194、更新部195および設定部196による処理の詳細については、説明を後述する。
【0022】
次に、一実施の形態の画像追尾動作を説明する。図5〜図9は一実施の形態の画像追尾動作を説明するための図、図10〜図12は一実施の形態の画像追尾処理を示すフローチャートである。ボディ駆動制御装置19は、第2撮像素子16により撮像した被写体画像のうち、ユーザが手動で追尾対象とする被写体(以後、追尾対象被写体)を指定するか、あるいはカメラが自動で追尾対象被写体を設定した後、操作部材20のレリーズボタンを半押しすると、被写体追尾処理を開始する。なお、以降の説明では、図5〜図9において水平方向をx軸、垂直方向をy軸とする座標系を用いる。
【0023】
レリーズボタンを全押しして撮影を行うとき以外は、クイックリターンミラー5が図1に破線で示す撮影光路内に設定されており、撮影レンズ8から入射した被写体光の一部は焦点板11上に結像される。そして、焦点板11上の被写界像はペンタダハプリズム13、プリズム17および結像レンズ18を介して第2撮像素子16へ導かれ、第2撮像素子16から被写界画像信号が繰り返し出力される。
【0024】
撮影レンズ8の撮影画面には複数の焦点検出エリアが設定されており、液晶表示素子12は焦点板11上の被写界像にエリアマークを重畳して、各焦点検出エリアの位置を表示する。この一実施の形態では、図5に示すように、撮影画面内の7カ所に焦点検出エリア45a〜45gが設定された例を示す。また、操作部材20の焦点検出エリア選択スイッチにより任意のエリアを選択すると、そのエリアのマークが点灯表示される。
【0025】
図5に示すように操作部材20の焦点検出エリア選択スイッチにより焦点検出エリア45cが選択され、この状態で操作部材20のレリーズボタンが半押しされると、焦点検出エリア45bが初回AFエリアとしてメモリ19dに記憶される。これにより、追尾対象被写体として初回AFエリア内の被写体が指定される。なお、ここでは撮影者が初回AFエリアを選択して追尾対象被写体を手動で指定する例を示すが、例えば自動的に被写体を認識する機能を備えたカメラでは被写体認識結果に基づいて初回AFエリアおよび追尾対象被写体を設定してもよい。
【0026】
図10のステップS1において、素子制御回路19aは第2撮像素子16に追尾初期画像(画像追尾処理を開始して最初に取得する画像)を取得させる。第2撮像素子16により撮像された初期追尾画像の画像情報は、被写界画像信号として画素ごとにRGB値で表される。マイクロコンピューター19cは、第2撮像素子16から入力した被写界画像信号のRGB値に基づいて、被写界画像の色情報と輝度情報とを算出する。このとき、マイクロコンピューター19cは、第2撮像素子16に含まれる640×480個の画素40のそれぞれの画像情報を、たとえば隣接する8×8個の画素40の画像情報をまとめて1つのブロックとするブロック化を行う。この場合、マイクロコンピューター19cは、隣接する8×8個の画像情報(すなわちRGB値)を平均化あるいは合計することによりブロック化を行う。その結果、図4(b)に示すように、被写界画像の640×480個の画素40のそれぞれの画像情報は、80×60個のブロック41(図4(b)の太線で囲まれる範囲内)の画像情報として表される。なお、以後の説明においては、上記のブロック化された1つのブロックをブロック画素41と呼ぶ。また、図4(b)においては、全被写界画像のうちの一部を拡大して示している。
【0027】
上述したようにしてブロック化が行われると、第2撮像素子16により撮像された画像情報は、ブロック画素41ごとに以下の式(1)のようにRGB値で表される。
R[x,y]、G[x,y]、B[x,y],
x=1〜80、y=1〜60 ・・・(1)
【0028】
そして、マイクロコンピューター19cは、上記のブロック画素41ごとのRGB値に基づいて、各ブロック画素41の色情報と輝度情報とを算出する。ここで、色情報は、以下の(2)式に示すように、色の偏り具合を示す値であるRG、BGにより表される。また、輝度情報として画像を取得したときの露光時間T、ゲインG、色合成係数Kr、Kg、Kbに基づいて、以下の(2)式より算出されたLによって表される。
RG[x,y]=Log2(R[x,y])−Log2(G[x,y])
BG[x,y]=Log2(B[x,y])−Log2(G[x,y])
L[x,y]=Log2(Kr×R[x,y]+Kg×G[x,y]+Kb×B[x,y])−Log2(T)−Log2(G)
・・・(2)
【0029】
次に、ステップS2で追尾制御部19hは、図11に示す追尾制御初期処理を実行する。図11のステップS101において、追尾制御部19hのテンプレート生成部191は、追尾初期画像の中の撮影者が指定した位置(ここでは初回AFエリアである焦点検出エリア45b)の画像情報((2)式参照)を被写体色情報としてメモリ19dに記憶する。ステップS102では、図6(a)に示すように、テンプレート生成部191は、追尾初期画像の中の焦点検出エリア45b(図5参照)の位置周辺部において上記被写体色情報と同様な色情報を示す同色情報領域を検出する。
【0030】
ステップS103では、テンプレート生成部191は、上記同色情報領域を含む四角形の領域を初期の追尾被写体領域47とする。なお、ここでは被写体色情報に基づいて追尾被写体領域47を決定する例を示すが、処理の簡素化を図るために一律に4×4個のブロック画素41のように追尾被写体領域47のサイズを統一したり、あるいは撮影レンズ8の距離情報や被写体の像倍率に応じて追尾被写体領域47のサイズを決定してもよい。
【0031】
ステップS104では、テンプレート生成部191は、ステップS103で決定した追尾初期画像の追尾被写体領域47をテンプレート画像48としてメモリ19dに記憶する。図6(a)に示すように、追尾被写体領域47のサイズ(大きさ)をTmpSizeとすると、図6(b)に示すテンプレート画像48の色情報および輝度情報は以下の式(3)ように表される。なお、以降の説明においては、追尾初期画像に基づいて生成されたテンプレート画像48を初期テンプレート画像と呼ぶ。また、以降の各式において、変数tはテンプレート画像の種類を示す変数であり、t=0が初期テンプレート画像48に対応する。
Ref[t,RG,i,j]=RG[x+i,y+j]
Ref[t,BG,i,j]=BG[x+i,y+j]
Ref[t,L,i,j]=L[x+i,y+j]
t=0、i=1〜TmpSize、j=1〜TmpSize ・・・(3)
【0032】
ステップS105では、テンプレート生成部191は、初期テンプレート画像48に基づいて、拡大テンプレート画像50を作成する。図6(c)に示すように、この拡大テンプレート画像50は、初期テンプレート画像48の内部に含まれる内部画像領域50a(図6(c)の破線で囲まれた領域)が初期テンプレート画像48と同一のサイズに拡大された画像である。換言すると、拡大テンプレート画像50は、初期テンプレート画像48をズームアップした場合に得られる画像に相当する。このため、後述するように、被写体がカメラ1に接近してくる場合に、拡大テンプレート画像50によって追尾対象被写体を検出できる。
【0033】
テンプレート生成部191は、拡大テンプレート50を作成する際に、まず、初期テンプレート画像48の内部を内部画像領域50aとして決定する。図7(a)においては、内部画像領域50aの一例として、初期テンプレート画像48の上下(y方向)についてそれぞれ2ブロック画素、左右(x方向)についてそれぞれ2ブロック画素ずつ内側の領域が決定された場合を示している。そして、テンプレート生成部191は、決定した内部画像領域50a(Sclup[cl,i,j])をメモリ19dに記憶する。なお、複数の内部画像領域50aを決定してもよい。図7(b)には、一例として、3種類の内部画像領域50a1〜50a3を決定した場合を示している。この場合、テンプレート生成部191は、内部画像領域50a1〜50a3のサイズが段階的に小さくなるように内部画像領域50a1〜50a3を決定する。
【0034】
上述のようにして内部画像領域50aを決定すると、テンプレート生成部191は、以下の式(4)に示す補間処理により内部画像領域50aを初期テンプレート画像48と同一のサイズに拡大して拡大テンプレート画像50(Ref[t,cl,i,j],t=1)を生成する。なお、変数tが1の場合には、拡大テンプレート画像50であることを示す。
Sclup[RG,s,u]=RG[x+s+n,y+u+n]
Sclup[BG,s,u]=BG[x+s+n,y+u+n]
Sclup[L,s,u]=L[x+s+n,y+u+n]
s=1〜拡大テンプレート画像のサイズ、u=1〜拡大テンプレート画像のサイズ、
n=初期テンプレート画像と内部画像領域との差分画素数 ・・・(4)
【0035】
なお、複数の内部画像領域50aを決定した場合(たとえば図7(b)の内部画像領域50a1〜50a3)、テンプレート生成部191は、それぞれの内部画像領域50aについて上述した補間処理により、初期テンプレート画像48と同一のサイズに拡大する。その結果、図6(d)に示すように、ズームアップの倍率が異なる複数種類の拡大テンプレート画像50_1、50_2、50_3が生成される。また、追尾対象の被写体が遠方に存在するため被写界画像内で小さな領域しか占有できない場合には、すなわち同色情報領域、被写体追尾領域47および初期テンプレート画像48のサイズが小さくなる。このような場合、テンプレート生成部191は、上記の方法によって初期テンプレート画像48の内部に内部画像領域50aを決定できない。したがって、テンプレート生成部191は、たとえば初期テンプレート画像48のサイズが4×4個のブロック画素41のような場合、初期テンプレート画像48と同一の画像情報を拡大テンプレート画像50として設定する。テンプレート生成部191は、拡大テンプレート画像50を生成するとメモリ19dに記憶する。
【0036】
以上で追尾制御初期処理を終了し、図10のステップS3へリターンする。リターン後の図10のステップS3において、マイクロコンピューター19cは操作部材20のレリーズボタンが全押しされたか否かを判別する。レリーズボタンが全押しされるまでの間、マイクロコンピューター19cは、ステップS4〜S11の処理を繰り返す。ステップS4では、次の撮影周期で第2撮像素子16により撮像された被写界画像(追尾次画像)について、マイクロコンピューター19cは、ステップS1と同様にして、画像情報R[x,y]、G[x,y]、B[x,y](x=1〜80、y=1〜60)を取得し、色情報RG[x,y],BG[x,y]および輝度情報L[x,y]を算出する。
【0037】
ステップS5では、設定部196は、テンプレート画像48と一致または類似する画像を探索するための領域(探索領域)49(図6(a))を設定する。ここでは、設定部196は、たとえば、追尾被写体領域47の上下左右方向にそれぞれ4ブロック画素分拡大したブロック画素範囲に含まれる領域を探索領域49として設定する。
【0038】
設定部196は、好ましくは追尾被写体領域47を中心にして探索領域49を設定する。追尾対象の被写体は今回検出された位置すなわち追尾被写体領域47を基点にして移動する。このため、設定部196によって追尾被写体領域47を中心にして探索領域49が設定されることにより、追尾対象の被写体を早く検出することができ、画像追尾の応答性を向上させることができる。なお、この探索領域49は縦横それぞれに所定個数のブロック画素を含む固定サイズの領域としてもよいし、追尾結果や追尾対象被写体の大きさに応じて変えるようにしてもよい。
【0039】
続くステップS6では追尾制御部19hの演算部192は、追尾演算処理を行う。演算部192は、追尾次画像の中の探索領域49から図6(a)に示す追尾被写体領域47と同じサイズの領域を順次切り出す。そして、演算部192は、切り出した画像と、図6(b)に示すテンプレート画像48とを、対応する画素ごとに相関を演算、すなわち画像情報の差分Diff[t(=0),sx,sy]を算出する。さらに、演算部192は、切り出した画像と、図6(c)に示す拡大テンプレート画像50とを、対応するブロック画素41ごとに相関を演算、すなわち画像情報の差分Diff[t(=1),sx,sy]を算出する。
【0040】
具体的には、演算部192は、探索領域49の始点位置を(x,y)としたとき、差分Diff[t,sx,sy]を次式(5)により算出する。
【数1】
【0041】
なお、(5)式におけるsx、syは、それぞれ切り出し画像の始点位置をずらす範囲(量)を示している。(5)式は以下の(1)、(2)の処理が行われていることを示している。
(1)探索領域49の中で追尾被写体領域47と同じサイズの領域を1ブロック画素ずつずらしながら切り出し画像を取得する。
(2)切り出した画像とテンプレート画像48との間および切り出した画像と拡大テンプレート画像50との間でブロック画素ごとの画像情報の差分Diffを求める。
【0042】
例えば、図8(a)に示すように探索領域49から順次切り出した画像(図8(a)においては、47a、47b、47c)と、テンプレート画像48とが順次比較され、それぞれの切り出し画像について差分Diffが算出される。同様に、探索領域49から順次切り出した画像(図8(a)の47a、47b、47c)と、拡大テンプレート画像50とが順次比較されて、それぞれの切り出し画像について差分Diffが算出される。そして、これらの差分Diffの内の最小の値を示す切り出し画像が、テンプレート画像48または拡大テンプレート画像50に最も類似している、類似度が高い画像となる。
【0043】
なお、図6(d)にて示したように、ズームアップの倍率が異なる複数種類の拡大テンプレート画像50_1、50_2、50_3が生成された場合については、演算部192は、変数tに、比較するテンプレート画像の種類の数を代入して上記の式(5)を演算する。この場合、演算部192は、1種類の初期テンプレート画像48と3種類の拡大テンプレート画像50_1、50_2、50_3とを合わせた数である4を変数tに代入する。式(5)を用いた演算により、演算部192は、生成されたテンプレート画像48および複数の拡大テンプレート画像50_1、50_2、50_3のそれぞれについて差分Diffを算出する。
【0044】
ステップ7においては、新しい追尾被写体位置を決定するための新追尾被写体位置決定処理を行う。演算部192により上記(5)式を用いて差分Diffが算出されると、選択部193は、複数の差分Diffの値のうち最も小さい値(最小差分値MinDiff)を選択する。最小差分値MinDiffが選択されると、検出部194は、最小差分値MinDiffとなるときの差分Diffの座標値(Mindx,Mindy)を検出する。そして、図8(b)に示すように、設定部196は、検出部194により検出された座標値(Mindx,Mindy)を中心として新たな追尾被写体領域47を設定する。換言すると、設定部196は、テンプレート画像48または拡大テンプレート画像50との類似度が最も高い切り出し領域を新たな追尾被写体領域47に設定する。
【0045】
検出部194は、さらに、最小差分値MinDiffを与える変数tが1であるか否かを判定する。変数tが1である場合には、検出部194は、カウンタのカウント数を1増やし、変数tが0の場合には、カウンタのカウント数を0にリセットする。このカウンタは、後述するテンプレート画像48を拡大テンプレート画像50に置換する際に、更新部195により参照される。
【0046】
ステップS8では、追尾制御部19hは、最小差分値MinDiffと、予め設定された類似閾値Dthとを比較することにより、ステップS7で決定された新しい追尾被写体領域47がテンプレート画像48または拡大テンプレート画像50と類似しているか否かの判定を行う。なお、類似閾値Dthは、通常の撮影シーンにおいて適切に類似判定が可能な値として設定されている。ステップS8の判定結果は、後述するステップS12における焦点調節の際に用いられる。
【0047】
ステップS9では、更新部195は、予め設定された更新閾値Upthを用いて、テンプレート画像48の更新処理の要否を判定する。更新閾値Upthは、通常の撮影シーンにおいて適切に類似判定が可能な値として設定されている。ステップS9において、新しい追尾被写体領域47とテンプレート画像48との類似度が高いと判定された場合に、テンプレート画像48の更新処理を行う。更新部195は、最小差分値MinDiffの値が更新閾値Upth以下の場合に、テンプレート画像48の更新処理が必要と判断する。本実施の形態では、更新部195は、元のテンプレート画像48の色情報や輝度情報などの画像情報の、たとえば80%に、新しい追尾被写体領域47の画像情報の20%を加えて、新しいテンプレート画像48を生成する。すなわち、更新部195は、更新処理が必要と初めて判定した場合には初期テンプレート画像48に更新処理を施して新たにテンプレート画像48を生成し、以後の処理では、順次、新たなテンプレート画像48に対して更新処理を施す。更新処理の演算は、以下の(6)式のように表すことができる。
Ref[0,RG,i,j]=0.8×Ref[0,RG,i,j]+0.2×RG[x+i−1,y+j−1]、
Ref[0,BG,i,j]=0.8×Ref[0,BG,i,j]+0.2×BG[x+i−1,y+j−1]、
Ref[0,L,i,j]=0.8×Ref[0,L,i,j]+0.2×L[x+i−1,y+j−1]、
i=1〜TmpSize、j=1〜TmpSize、x、yは新たな追尾被写体領域47の位置 ・・・(6)
【0048】
テンプレート画像48の更新処理の結果、元のテンプレート画像48の画像情報に対して、最新の画像情報が少しずつ追加されることにより更新される。このため、何らかの原因による追尾被写体の変化(たとえば被写体の顔の向きの変化など)の影響を抑制して被写体追尾の信頼性を向上させることができる。なお、元のテンプレート画像48の画像情報の割合と新しい追尾被写体領域47の画像情報の割合とは最小差分値MinDiffの値に応じて可変にしてもよい。
【0049】
ステップS10において、更新部195は、図12に示す拡大テンプレート画像50の更新処理を行う。ステップS201では、予め設定された拡大更新閾値Sclupthを用いて、拡大テンプレート画像50の更新処理の要否を判定する。拡大更新閾値Sclupthは、通常の撮影シーンにおいて適切に類似判定が可能な値として設定されている。更新部195は、最小差分値MinDiffの値が拡大更新閾値Sclupth以下の場合に、拡大テンプレート画像50の更新処理が必要と判断する。
【0050】
続くステップS202では、更新部195は、上述したテンプレート画像48の更新処理の場合と同様にして、拡大テンプレート画像50を更新する。すなわち、更新部195は、元の拡大テンプレート画像50の色情報や輝度情報などの画像情報の、たとえば80%に、新しい追尾被写体領域47の画像情報の20%を加えることにより新たな拡大テンプレート画像50を生成する。なお、ステップS2において、初期テンプレート画像48のサイズが小さく、初期テンプレート画像48と同一の画像を拡大テンプレート画像50として設定した場合には、更新部195は、新しい追尾被写体領域47の画像情報を加える割合を上記の20%よりも増やして、新しい追尾被写体領域47の画像情報をたとえば40%加えて新たな拡大テンプレート画像50を生成する。
【0051】
ステップS203では、更新部195は、撮影周期ごとに上記の処理を繰り返す間に、拡大テンプレート画像50で検出された追尾被写体の位置を新たな追尾被写体領域47として設定した回数が、連続してm回となったか否かを判定する。すなわち、更新部195は、追尾被写体がカメラ1に接近しているために、被写界における追尾被写体が大きくなっているか否かを判定する。この場合、更新部195は、カウンタによるカウント数がmであるか否かを判定する。カウント数がmではない場合には、以下の処理を行わずに拡大テンプレート画像更新処理を終了する。
【0052】
カウント数がmの場合には、更新部195は、ステップS204において、以下の式(7)を用いて、テンプレート画像48を拡大テンプレート画像50によって置換する。
Ref[0,RG,i,j]=Ref[1,RG,i,j]
Ref[0,BG,i,j]=Ref[1,BG,i,j]
Ref[0,L,i,j]=Ref[1,L,i,j]
なお、i=1〜TmpSize、j=1〜TmpSize ・・・(7)
【0053】
カウント数がm未満の場合には、追尾制御部19hは、図9(a)に示すテンプレート画像48と拡大テンプレート画像50とを用いて追尾被写体検出処理を行っていた。カウント数がmに達し更新部195が上記の置換処理を行うと、追尾制御部19hは、次回以降の被写体位置決定処理において、図9(a)に示す拡大テンプレート画像50を図9(b)に示すテンプレート画像48として用いる。なお、図9(a)に示すテンプレート画像48と拡大テンプレート画像50とはそれぞれ図6(b)に示すテンプレート画像48と図6(c)に示す拡大テンプレート画像50と同一のものである。
【0054】
ステップS204でテンプレート画像48の置換処理を行った場合には、ステップS205において、更新部195は、新たな拡大テンプレート画像50を生成する。すなわち、更新部195は、新たな追尾対象領域47に内部画像領域50aを決定して、補間処理によりテンプレート画像48と同一のサイズとなるように拡大することにより拡大テンプレート画像50を生成する。その結果、図8(b)に示す新たな追尾対象領域47の内部の破線で囲んだ内部画像領域50aに対応する拡大テンプレート画像50(図9(b))が生成される。換言すると、更新部195は、カウンタのカウント数がmの場合には、新たな追尾被写体領域47の位置を基準として拡大テンプレート画像50を生成する。
【0055】
以上で拡大テンプレート画像50の更新処理を終了し、図10のステップS11へリターンする。リターン後のステップS11では、焦点検出演算部19fは、ステップS7における被写体位置決定処理で決定した新しい追尾被写体領域47を用いて焦点制御を行う。この場合、新しく決定された追尾被写体領域47がテンプレート画像48または拡大テンプレート画像50と類似していると追尾制御部19hによって判定された場合(ステップS8)は、焦点検出演算部19fは、新しい追尾被写体領域47内に含まれる追尾対象に対して合焦制御を行う。焦点検出演算部19fは、新しい追尾被写体領域47内に焦点検出エリア45a〜45gの少なくとも一つが含まれる場合には、新しい追尾被写体領域47内に含まれる焦点検出エリア45a〜45gで検出されたデフォーカス量のうち最も小さいものを採用し、そのデフォーカス量に基づいて撮影レンズ8の焦点調節を行う。新しい追尾被写体領域47内に焦点検出エリア45a〜45gが含まれない場合には、焦点検出演算部19f新しい追尾被写体領域47との距離、または前回の追尾結果で採用された焦点検出エリア45a〜45gとの距離の少なくとも一方に基づいて採用する焦点検出エリア45a〜45gを決定してもよい。新しく決定された追尾被写体領域47がテンプレート画像48または拡大テンプレート画像50と類似していないと追尾制御部19hによって判定された場合(ステップS8)は、焦点検出演算部19fは、前回の処理で検出されたデフォーカス量を用いて焦点調節を行う。上記処理が終了するとステップS3へ戻る。
【0056】
ステップS3で操作部材20のレリーズボタンの全押し操作が検出されるとステップS12へ進み、マイクロコンピューター19cは、撮影制御を実行する。なお、撮像制御に際しては、露出演算部19eはステップS7で決定した新しい追尾被写体領域47の輝度情報に基づいて露出演算を行い、絞り値とシャッター速度を算出する。これらの露出値にしたがって、マイクロコンピューター19cはシャッター7および絞り21を駆動制御し、第1撮像素子4に撮像を行わせる。
【0057】
以上で説明した実施の形態によれば、以下の作用効果が得られる。
(1)第2撮像素子16は、撮影レンズ8により結像される像を繰り返し撮像して、被写界画像を生成する。テンプレート生成部191は、被写界画像に含まれる追尾対象領域である追尾被写体領域47に基づいて、少なくとも1つの拡大テンプレート画像50を含む複数のテンプレート画像48、50を生成する。演算部192は、被写界画像の内部の探索領域49と、テンプレート生成部191により生成された複数のテンプレート画像48、50のそれぞれとの間の相関関係を演算する。選択部193は、演算部192による複数のテンプレート画像48,50のそれぞれに対する演算結果を比較し、比較結果に基づいて、演算結果を選択する。検出部194は、選択部193により選択された演算結果に基づいて、被写界画像における追尾対象被写体の位置を検出する。上記の拡大テンプレート画像50を生成する際には、テンプレート生成部191は、追尾対象領域47に含まれる画像領域を補間処理により拡大し、拡大された画像領域に基づいて、拡大テンプレート画像50を生成するようにした。具体的には、テンプレート生成部191は、追尾被写体領域47の画像情報に基づいて拡大テンプレート画像50とは異なる初期テンプレート画像48を生成する。そして、テンプレート生成部191は、初期テンプレート画像48の内部に内部画像領域50aを設定し、設定された内部画像領域50aを初期テンプレート画像48の大きさとなるように補間処理により拡大することによって拡大テンプレート画像50を生成するようにした。したがって、拡大テンプレート画像50は、初期テンプレート画像48をズームアップした場合に得られる画像に相当するので、追尾対象被写体がカメラ1に接近してくる場合であっても、拡大テンプレート画像50によって追尾対象を検出できる。
【0058】
(2)設定部196は、検出部194により検出された追尾対象被写体の位置に基づいて、新たな追尾対象領域47を設定する。そして、演算部192による演算結果に基づいて、複数のテンプレート画像48、50を更新すると判定した場合、更新部195は、設定部196により設定された新たな追尾対象領域47の画像情報を用いて、複数のテンプレート画像48、50を更新するようにした。したがって、更新処理の結果、元のテンプレート画像48または拡大テンプレート画像50の画像情報に対して、最新の画像情報が少しずつ追加されることにより更新される。このため、何らかの原因による追尾被写体の変化(たとえば被写体の顔の向きの変化など)の影響を抑制して被写体追尾の信頼性を向上させることができる。
【0059】
(3)演算部192は、拡大テンプレート画像50の画像情報と、探索領域49内の画像情報との差分値を演算し、更新部195は、演算部192により算出された差分値に応じて拡大テンプレート画像50の更新の要否を判定するようにした。この場合、更新部195は、新たな追尾対象領域47内の画像情報と、拡大テンプレート画像50の画像情報とを所定の割合で合成して拡大テンプレート画像50を更新するようにした。したがって、最小差分値MinDiffの値が拡大更新閾値Sclupth以下、すなわち類似度が高い場合には、拡大テンプレート画像50に最新の画像情報が加わる。その結果、次回以降の処理において、拡大テンプレート画像50による追尾対象被写体の検出精度を向上させることができる。さらに、上記(2)のように、拡大テンプレート画像50の画像情報に対して、最新の画像情報が少しずつ追加されることにより更新されるので、何らかの原因による追尾被写体の変化の影響を抑制して被写体追尾の信頼性を向上させることができる。
【0060】
(4)テンプレート生成部191は、初期テンプレート画像48内に内部画像領域50aを設定できない場合には、初期テンプレート画像48の画像情報と同一の画像情報を用いて拡大テンプレート画像50を生成する。そして、テンプレート生成部191により初期テンプレート画像48の画像情報と同一の画像情報を用いて拡大テンプレート画像50が生成された場合には、更新部195は拡大テンプレート画像50の画像情報に対して新たな追尾対象領域47の画像情報を合成する割合を高くするようにした。したがって、初期テンプレート画像48と同一の拡大テンプレート画像50を用いる場合には、拡大テンプレート画像50を早い段階の更新処理で初期テンプレート画像48をズームアップした場合に相当する画像に更新できる。その結果、追尾対象被写体がカメラ1に接近してくる場合であっても、拡大テンプレート画像50によって追尾対象を検出できる。
【0061】
(5)選択部193により連続して所定の回数(m回)、拡大テンプレート画像50に対する演算結果が選択された場合には、更新部195は、新たな追尾対象領域47内の画像情報に基づいて新たな拡大テンプレート画像50を生成するようにした。さらに、更新部195は、新たな拡大テンプレート画像50を生成する前の拡大テンプレート画像50の画像情報を新たなテンプレート画像48として置換するようにした。したがって、最新の追尾対象領域47の画像情報を用いて拡大テンプレート画像50を生成し直すので、連続して拡大テンプレート画像50の演算結果が選択されている場合、すなわち追尾対象被写体がカメラ1に対して相対的に接近している場合であっても、追尾対象被写体を検出し続けることができる。
【0062】
(6)選択部193は、複数のテンプレート画像48,50のそれぞれに対応する複数の演算結果のうち、テンプレート画像48,50と探索領域49との間の類似度が最も高いことを示す演算結果を選択するようにした。具体的には、演算部192は、複数のテンプレート画像48,50内の画像情報のそれぞれと、探索領域49の画像情報との差分値を演算し、選択部193は、演算部192により算出された差分値が最小の場合に、類似度が最も高いと判定するようにした。したがって、複数のテンプレート画像48、50を用いたテンプレートマッチングを行った場合であっても、誤検出等の発生を抑制して追尾精度を維持できる。
【0063】
以上で説明した実施の形態の撮像装置1を以下のように変形できる。
(1)更新部195は初期テンプレート画像48を更新しなくてもよい。この場合、更新部195は、ステップS9で更新処理を行うと判定すると、初期テンプレート画像48をコピーして複製テンプレート画像を生成する。そして、更新部195は、複製テンプレート画像に対して上述した更新処理を施して、新たにテンプレート画像(更新テンプレート画像)を生成する。2回目以降に更新処理を行うと判定した場合、更新部195は、更新テンプレート画像に対して更新処理を施す。すなわち、更新部195は、一連の処理において、更新テンプレート画像および/または拡大テンプレート画像50に対して更新処理を行う。そして、追尾制御部19hは、初期テンプレート画像48と、更新テンプレート画像と、拡大テンプレート画像50とを用いて、探索領域49内で上述した追尾演算処理を行えばよい。この結果、初期テンプレート画像48を更新することなく保持し続けているので、追尾対象被写体がカメラ1に対して再び遠ざかったような場合等には、再度初期テンプレート画像48を用いて追尾対象被写体を検出できる。
【0064】
さらに加えて、拡大テンプレート画像50で検出された位置を新たな追尾被写体領域47として設定した回数が、連続して所定回数となった場合には、追尾制御部19hは、初期テンプレート画像48で検出された位置が新たな追尾被写体領域47として採用されにくくなるように処理を加える。この場合、上記のカウンタによるカウント数がnのときには、演算部192は初期テンプレート画像48と探索領域49との差分Diff[0,sx,sy]の値に所定の係数kを加算することにより、初期テンプレート画像45の演算結果が選択部193により選択されにくくなるように補正を施す。すなわち、差分Diff[0,sx,sy]の値を大きくすることにより、初期テンプレート画像48による演算結果が最小差分値MinDiffとして採用されにくくなる。この結果、追尾対象の被写体がカメラ1に接近している場合、すなわち被写界画像中の追尾対象が大きくなった場合に、追尾対象とは異なる背景の被写体(すなわち小さな被写体)を追尾対象として誤検出することを防ぐことができる。
【0065】
さらに、拡大テンプレート画像50で検出された位置を新たな追尾被写体領域47として設定した回数が、連続して所定回数となった場合には、追尾制御部19hは、初期テンプレート画像48で検出された位置が選択部193によって選択されることを禁止してもよい。この場合、初期テンプレート画像48と拡大テンプレート画像50の2つを用いて追尾処理をする場合であれば、上記のカウンタによるカウント数がnのときには、選択部193は、拡大テンプレート画像50と探索領域49との差分Diff[1,sx,sy]の値のみを選択する。
【0066】
(2)テンプレート生成部191は、初期テンプレート画像48内の内部画像領域50aを補間処理により拡大して拡大テンプレート画像50を生成するものに代えて、初期テンプレート画像48を補間処理により拡大して拡大テンプレート画像を生成してもよい。すなわち、図13に示すように、テンプレート生成部191は、初期テンプレート画像48の画像情報がズームアップされた拡大テンプレート画像50’を生成する。
【0067】
(3)テンプレート生成部191は、初期テンプレート画像48の内部画像領域50aから拡大テンプレート画像50を生成するものに代えて、被写体領域47の画像情報から拡大テンプレート画像50を生成してもよい。この場合、図14に示すように、テンプレート生成部191は、被写界画像内に設定された被写体追尾領域47の内部に、内部画像領域50a’を設定する。そして、テンプレート生成部191は、内部画像領域50a’を補間処理により拡大して拡大テンプレート画像50を生成すればよい。
【0068】
(4)交換レンズ3のレンズ駆動制御装置22からレンズマウント部の接点23を介して入力されたレンズ情報に基づいて、選択部193は、拡大テンプレート画像50を用いた演算結果を優先して演算してもよい。レンズ情報に基づいて、交換レンズ3がズームアップされている、または被写体の距離が近づいていると判定された場合、すなわち撮影画面内で追尾被写体の大きさが大きくなる場合には、選択部193は拡大テンプレート画像50を用いた演算結果を優先して選択する。優先する方法としては、拡大テンプレート画像50の演算結果の差分値が類似閾値以内であれば他のテンプレート画像の結果によらずに拡大テンプレート画像50の結果を選択すればよい。または、拡大テンプレート画像50以外の演算結果に重みを付けたうえで、最も差分値が小さい結果を選択すればよい。この結果、被写界画像中の追尾対象が大きくなった場合に、追尾対象とは異なる背景の被写体(すなわち小さな被写体)を追尾対象として誤検出することを防ぐことができる。
【0069】
(5)検出部194は、最小差分値MinDiffを与える変数tが1のときにカウンタのカウント数を1増やすものに代えて、焦点検出演算部19fによる合焦制御の結果に基づいて、カウンタのカウント数を1増やしてもよい。この場合、焦点検出演算部19fが前回のデフォーカス量と今回のデフォーカス量とに基づいて、追尾対象被写体が撮影レンズ8の光軸方向に沿って、カメラ1に接近していると判定した場合、検出部194は、カウンタのカウント数を1増やす。そして、カウント数がmの場合には、選択部193は拡大テンプレート画像50を用いた演算結果を選択すればよい。この結果、追尾対象の被写体がカメラ1に接近している場合、すなわち被写界画像中の追尾対象が大きくなった場合に、追尾対象とは異なる背景の被写体(すなわち小さな被写体)を追尾対象として誤検出することを防ぐことができる。
【0070】
(6)演算部192は、差分Diffを算出するものに限らない。演算部192は、テンプレート画像48の画像情報および拡大テンプレート画像50の画像情報のそれぞれと、切り出し画像の画像情報との間で加算や、除算等の四則演算を行ってもよいし、最小二乗法等を用いてもよい。この場合も、選択部193は、値が最小となる演算結果、すなわち類似度が最大であることを示す演算結果を選択する。
【0071】
また、本発明の特徴を損なわない限り、本発明は上記実施の形態に限定されるものではなく、本発明の技術的思想の範囲内で考えられるその他の形態についても、本発明の範囲内に含まれる。説明に用いた実施の形態および変形例は、それぞれを適宜組合わせて構成しても構わない。
【符号の説明】
【0072】
1 撮像装置、 16 第2撮像素子、
19 ボディ駆動制御装置、 19c マイコン、
19f 焦点検出演算部、 19h 追尾制御部、
23 接点、 191 テンプレート生成部、
192 演算部、 193 選択部、
194 検出部、 195 更新部、
196 設定部
【特許請求の範囲】
【請求項1】
結像光学系により結像される像を繰り返し撮像して、被写界画像を生成する撮像手段と、
前記被写界画像に含まれる追尾対象領域に基づいて、少なくとも1つの第1テンプレート画像を含む複数のテンプレート画像を生成する生成手段と、
前記被写界画像の内部の探索領域画像と、前記生成手段により生成された前記複数のテンプレート画像のそれぞれとの間の相関関係を演算する演算手段と、
前記演算手段による前記複数のテンプレート画像のそれぞれに対する演算結果を比較し、比較結果に基づいて、前記演算結果を選択する選択手段と、
前記選択手段により選択された前記演算結果に基づいて、前記被写界画像における追尾対象の画像の位置を検出する検出手段とを備え、
前記生成手段は、前記追尾対象領域に含まれる画像領域を補間処理により拡大し、前記拡大された前記画像領域に基づいて、前記第1テンプレート画像を生成することを特徴とする画像追尾装置。
【請求項2】
請求項1に記載の画像追尾装置において、
前記生成手段は、前記追尾対象領域内の画像情報に基づいて前記第1テンプレート画像とは異なる第2テンプレート画像を生成し、前記第2テンプレート画像の内部に前記画像領域を設定し、前記設定された前記画像領域を前記第2テンプレート画像の大きさとなるように補間処理により拡大し、前記拡大された前記画像領域に基づいて前記第1テンプレート画像を生成することを特徴とする画像追尾装置。
【請求項3】
請求項2に記載の画像追尾装置において、
前記検出手段により検出された前記追尾対象の画像の位置に基づいて、新たな追尾対象領域を設定する設定手段と、
前記演算手段による前記演算結果に基づいて、前記複数のテンプレート画像を更新すると判定した場合、前記設定手段により設定された前記新たな追尾対象領域内の画像情報を用いて、前記複数のテンプレート画像を更新する更新手段とを備えることを特徴とする画像追尾装置。
【請求項4】
請求項3に記載の画像追尾装置において、
前記更新手段は、前記演算手段により算出された前記差分値に応じて前記第1テンプレート画像の更新の要否を判定することを特徴とする画像追尾装置。
【請求項5】
請求項3または4に記載の画像追尾装置において、
前記更新手段は、前記新たな追尾対象領域内の画像情報と、前記第1テンプレート画像の画像情報とを所定の割合で合成して前記第1テンプレート画像を更新することを特徴とする画像追尾装置。
【請求項6】
請求項5に記載の画像追尾装置において、
前記生成手段は、前記第2テンプレート画像内に前記画像領域を設定できない場合には、前記第2テンプレート画像の画像情報と同一の画像情報を用いて前記第1テンプレート画像を生成し、
前記更新手段は、前記生成手段により前記第2テンプレート画像の画像情報と同一の画像情報を用いて前記第1テンプレート画像が生成された場合には、前記第1テンプレート画像の画像情報に対して前記新たな追尾対象領域内の画像情報を合成する割合を高くすることを特徴とする画像追尾装置。
【請求項7】
請求項3乃至6のいずれか一項に記載の画像追尾装置において、
前記選択手段により連続して所定の回数、前記第1テンプレート画像に対する演算結果が選択された場合には、前記更新手段は、前記新たな追尾対象領域内の画像情報に基づいて新たな第1テンプレート画像を生成することを特徴とする画像追尾装置。
【請求項8】
請求項7に記載の画像追尾装置において、
前記選択手段により連続して所定の回数、前記第1テンプレート画像に対する演算結果が選択された場合には、前記更新手段は、前記新たな第1テンプレート画像を生成する前の前記第1テンプレート画像の画像情報を、前記第1テンプレート画像とは異なる前記テンプレート画像として置換することを特徴とする画像追尾装置。
【請求項9】
請求項3乃至6のいずれか一項に記載の画像追尾装置において、
前記選択手段は、連続して所定の回数、前記第1テンプレート画像に対する演算結果を選択した場合には、次回以降は前記第2テンプレート画像に対する演算結果の選択を禁止することを特徴とする画像追尾装置。
【請求項10】
請求項3乃至6のいずれか一項に記載の画像追尾装置において、
前記選択手段により、連続して所定の回数、前記第1テンプレート画像に対する演算結果が選択された場合、前記演算手段は、次回以降に算出した前記第2テンプレート画像の演算結果に対して、前記第2テンプレート画像の演算結果が前記選択手段によって選択されにくくさせるための補正を施すことを特徴とする画像追尾装置。
【請求項11】
請求項1乃至10のいずれか一項に記載の画像追尾装置において、
前記選択手段は、前記複数のテンプレート画像のそれぞれに対応する複数の前記演算結果のうち、前記テンプレート画像と前記探索領域画像との間の類似度が最大であることを示す演算結果を選択することを特徴とする画像追尾装置。
【請求項12】
請求項11に記載の画像追尾装置において、
前記演算手段は、前記複数のテンプレート画像内の画像情報のそれぞれと、前記探索領域画像内の画像情報との差分値を演算し、
前記選択手段は、前記演算手段により算出された前記差分値が最小の場合に、前記類似度が最大であると判定することを備えることを特徴とする画像追尾装置。
【請求項13】
結像光学系により結像される像を繰り返し撮像して、被写界画像を生成する撮像手段と、
前記被写界画像に基づいて、少なくとも1つの第1テンプレート画像を含む複数のテンプレート画像を生成する生成手段と、
前記被写界画像における探索領域画像と、前記生成手段により生成された前記複数のテンプレート画像のそれぞれとの間の相関関係を演算する演算手段と、
前記結像光学系の撮影距離に関する情報を入力する入力手段と、
前記入力手段により入力された前記撮影距離に関する情報に基づいて、追尾対象が相対的に接近していることを判定する判定手段と、
前記判定手段により前記追尾対象が接近していると判定された場合には、前記演算手段による前記複数のテンプレート画像のそれぞれに対する演算結果のうち、前記第1テンプレート画像に対する演算結果を優先して選択し、前記判定手段により前記追尾対象の接近が判定されない場合には、前記演算手段による演算結果のうち前記第1テンプレート画像とは異なる前記テンプレート画像による演算結果を選択する選択手段と、
前記選択手段により選択された前記演算結果に基づいて、前記被写界画像における前記追尾対象の画像の位置を検出する検出手段と備え、
前記生成手段は、前記被写界画像に含まれる追尾対象領域を決定し、前記追尾対象領域に含まれる画像領域を補間処理により拡大し、前記拡大された前記画像領域に基づいて、前記第1テンプレート画像を生成することを特徴とする画像追尾装置。
【請求項14】
結像光学系により結像される像を繰り返し撮像して、被写界画像を生成する第1撮像手段と、
前記被写界画像に基づいて、少なくとも1つの第1テンプレート画像を含む複数のテンプレート画像を生成する生成手段と、
前記被写界画像における探索領域画像と、前記生成手段により生成された前記複数のテンプレート画像のそれぞれとの間の相関関係を演算する演算手段と、
前記結像光学系の焦点状態を演算して、焦点調節を行う焦点調節手段と、
前記焦点調節手段による演算結果に基づいて、追尾対象が前記結像光学系の光軸方向に対して接近しているか否かを判定する判定手段と、
前記判定手段により前記追尾対象が接近していると判定された場合には、前記演算手段による前記複数のテンプレート画像のそれぞれに対する演算結果のうち、前記第1テンプレート画像に対する演算結果を優先して選択し、前記判定手段により前記追尾対象の接近が判定されない場合には、前記演算手段による演算結果のうち前記第1テンプレート画像とは異なる前記テンプレート画像による演算結果を選択する選択手段と、
前記選択手段により選択された前記演算結果に基づいて、前記被写界画像における前記追尾対象の画像の位置を検出する検出手段と備え、
前記生成手段は、前記被写界画像に含まれる追尾対象領域を決定し、前記追尾対象領域に含まれる画像領域を補間処理により拡大し、前記拡大された前記画像領域に基づいて、前記第1テンプレート画像を生成することを特徴とする画像追尾装置。
【請求項1】
結像光学系により結像される像を繰り返し撮像して、被写界画像を生成する撮像手段と、
前記被写界画像に含まれる追尾対象領域に基づいて、少なくとも1つの第1テンプレート画像を含む複数のテンプレート画像を生成する生成手段と、
前記被写界画像の内部の探索領域画像と、前記生成手段により生成された前記複数のテンプレート画像のそれぞれとの間の相関関係を演算する演算手段と、
前記演算手段による前記複数のテンプレート画像のそれぞれに対する演算結果を比較し、比較結果に基づいて、前記演算結果を選択する選択手段と、
前記選択手段により選択された前記演算結果に基づいて、前記被写界画像における追尾対象の画像の位置を検出する検出手段とを備え、
前記生成手段は、前記追尾対象領域に含まれる画像領域を補間処理により拡大し、前記拡大された前記画像領域に基づいて、前記第1テンプレート画像を生成することを特徴とする画像追尾装置。
【請求項2】
請求項1に記載の画像追尾装置において、
前記生成手段は、前記追尾対象領域内の画像情報に基づいて前記第1テンプレート画像とは異なる第2テンプレート画像を生成し、前記第2テンプレート画像の内部に前記画像領域を設定し、前記設定された前記画像領域を前記第2テンプレート画像の大きさとなるように補間処理により拡大し、前記拡大された前記画像領域に基づいて前記第1テンプレート画像を生成することを特徴とする画像追尾装置。
【請求項3】
請求項2に記載の画像追尾装置において、
前記検出手段により検出された前記追尾対象の画像の位置に基づいて、新たな追尾対象領域を設定する設定手段と、
前記演算手段による前記演算結果に基づいて、前記複数のテンプレート画像を更新すると判定した場合、前記設定手段により設定された前記新たな追尾対象領域内の画像情報を用いて、前記複数のテンプレート画像を更新する更新手段とを備えることを特徴とする画像追尾装置。
【請求項4】
請求項3に記載の画像追尾装置において、
前記更新手段は、前記演算手段により算出された前記差分値に応じて前記第1テンプレート画像の更新の要否を判定することを特徴とする画像追尾装置。
【請求項5】
請求項3または4に記載の画像追尾装置において、
前記更新手段は、前記新たな追尾対象領域内の画像情報と、前記第1テンプレート画像の画像情報とを所定の割合で合成して前記第1テンプレート画像を更新することを特徴とする画像追尾装置。
【請求項6】
請求項5に記載の画像追尾装置において、
前記生成手段は、前記第2テンプレート画像内に前記画像領域を設定できない場合には、前記第2テンプレート画像の画像情報と同一の画像情報を用いて前記第1テンプレート画像を生成し、
前記更新手段は、前記生成手段により前記第2テンプレート画像の画像情報と同一の画像情報を用いて前記第1テンプレート画像が生成された場合には、前記第1テンプレート画像の画像情報に対して前記新たな追尾対象領域内の画像情報を合成する割合を高くすることを特徴とする画像追尾装置。
【請求項7】
請求項3乃至6のいずれか一項に記載の画像追尾装置において、
前記選択手段により連続して所定の回数、前記第1テンプレート画像に対する演算結果が選択された場合には、前記更新手段は、前記新たな追尾対象領域内の画像情報に基づいて新たな第1テンプレート画像を生成することを特徴とする画像追尾装置。
【請求項8】
請求項7に記載の画像追尾装置において、
前記選択手段により連続して所定の回数、前記第1テンプレート画像に対する演算結果が選択された場合には、前記更新手段は、前記新たな第1テンプレート画像を生成する前の前記第1テンプレート画像の画像情報を、前記第1テンプレート画像とは異なる前記テンプレート画像として置換することを特徴とする画像追尾装置。
【請求項9】
請求項3乃至6のいずれか一項に記載の画像追尾装置において、
前記選択手段は、連続して所定の回数、前記第1テンプレート画像に対する演算結果を選択した場合には、次回以降は前記第2テンプレート画像に対する演算結果の選択を禁止することを特徴とする画像追尾装置。
【請求項10】
請求項3乃至6のいずれか一項に記載の画像追尾装置において、
前記選択手段により、連続して所定の回数、前記第1テンプレート画像に対する演算結果が選択された場合、前記演算手段は、次回以降に算出した前記第2テンプレート画像の演算結果に対して、前記第2テンプレート画像の演算結果が前記選択手段によって選択されにくくさせるための補正を施すことを特徴とする画像追尾装置。
【請求項11】
請求項1乃至10のいずれか一項に記載の画像追尾装置において、
前記選択手段は、前記複数のテンプレート画像のそれぞれに対応する複数の前記演算結果のうち、前記テンプレート画像と前記探索領域画像との間の類似度が最大であることを示す演算結果を選択することを特徴とする画像追尾装置。
【請求項12】
請求項11に記載の画像追尾装置において、
前記演算手段は、前記複数のテンプレート画像内の画像情報のそれぞれと、前記探索領域画像内の画像情報との差分値を演算し、
前記選択手段は、前記演算手段により算出された前記差分値が最小の場合に、前記類似度が最大であると判定することを備えることを特徴とする画像追尾装置。
【請求項13】
結像光学系により結像される像を繰り返し撮像して、被写界画像を生成する撮像手段と、
前記被写界画像に基づいて、少なくとも1つの第1テンプレート画像を含む複数のテンプレート画像を生成する生成手段と、
前記被写界画像における探索領域画像と、前記生成手段により生成された前記複数のテンプレート画像のそれぞれとの間の相関関係を演算する演算手段と、
前記結像光学系の撮影距離に関する情報を入力する入力手段と、
前記入力手段により入力された前記撮影距離に関する情報に基づいて、追尾対象が相対的に接近していることを判定する判定手段と、
前記判定手段により前記追尾対象が接近していると判定された場合には、前記演算手段による前記複数のテンプレート画像のそれぞれに対する演算結果のうち、前記第1テンプレート画像に対する演算結果を優先して選択し、前記判定手段により前記追尾対象の接近が判定されない場合には、前記演算手段による演算結果のうち前記第1テンプレート画像とは異なる前記テンプレート画像による演算結果を選択する選択手段と、
前記選択手段により選択された前記演算結果に基づいて、前記被写界画像における前記追尾対象の画像の位置を検出する検出手段と備え、
前記生成手段は、前記被写界画像に含まれる追尾対象領域を決定し、前記追尾対象領域に含まれる画像領域を補間処理により拡大し、前記拡大された前記画像領域に基づいて、前記第1テンプレート画像を生成することを特徴とする画像追尾装置。
【請求項14】
結像光学系により結像される像を繰り返し撮像して、被写界画像を生成する第1撮像手段と、
前記被写界画像に基づいて、少なくとも1つの第1テンプレート画像を含む複数のテンプレート画像を生成する生成手段と、
前記被写界画像における探索領域画像と、前記生成手段により生成された前記複数のテンプレート画像のそれぞれとの間の相関関係を演算する演算手段と、
前記結像光学系の焦点状態を演算して、焦点調節を行う焦点調節手段と、
前記焦点調節手段による演算結果に基づいて、追尾対象が前記結像光学系の光軸方向に対して接近しているか否かを判定する判定手段と、
前記判定手段により前記追尾対象が接近していると判定された場合には、前記演算手段による前記複数のテンプレート画像のそれぞれに対する演算結果のうち、前記第1テンプレート画像に対する演算結果を優先して選択し、前記判定手段により前記追尾対象の接近が判定されない場合には、前記演算手段による演算結果のうち前記第1テンプレート画像とは異なる前記テンプレート画像による演算結果を選択する選択手段と、
前記選択手段により選択された前記演算結果に基づいて、前記被写界画像における前記追尾対象の画像の位置を検出する検出手段と備え、
前記生成手段は、前記被写界画像に含まれる追尾対象領域を決定し、前記追尾対象領域に含まれる画像領域を補間処理により拡大し、前記拡大された前記画像領域に基づいて、前記第1テンプレート画像を生成することを特徴とする画像追尾装置。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【公開番号】特開2012−191399(P2012−191399A)
【公開日】平成24年10月4日(2012.10.4)
【国際特許分類】
【出願番号】特願2011−52711(P2011−52711)
【出願日】平成23年3月10日(2011.3.10)
【出願人】(000004112)株式会社ニコン (12,601)
【Fターム(参考)】
【公開日】平成24年10月4日(2012.10.4)
【国際特許分類】
【出願日】平成23年3月10日(2011.3.10)
【出願人】(000004112)株式会社ニコン (12,601)
【Fターム(参考)】
[ Back to top ]