
畦畔散布機
【課題】畦畔散布機においては、圃場に対し常に単位面積あたりの散布量が均一であることが望まれる。しかし、薬剤散布開始時では動力散布の出力が安定するまでに時間を要するので、該出力安定までは均一に散布はできない。例えば、始動時の低出力では散布距離は短いので、前述した単位面積あたりの散布量は出力安定時のときより多くなってしまう。
【解決手段】自走式の畦畔散布機1において、走行部に走行速度検知センサー66を設け、動力散布装置17の薬剤散布を駆動によるスピンナーの回転によって可能とし、該スピンナーの回転数検知センサー65を設け、前記動力散布装置の薬剤タンクよりの散布薬剤量を制御する手段を設け、前記走行速度と、前記動力散布回転数の検知によって、制御部15によって散布量を可変制御可能とした。
【解決手段】自走式の畦畔散布機1において、走行部に走行速度検知センサー66を設け、動力散布装置17の薬剤散布を駆動によるスピンナーの回転によって可能とし、該スピンナーの回転数検知センサー65を設け、前記動力散布装置の薬剤タンクよりの散布薬剤量を制御する手段を設け、前記走行速度と、前記動力散布回転数の検知によって、制御部15によって散布量を可変制御可能とした。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、動力散布装置を移動台車に搭載した畦畔散布機の技術に関する。
【背景技術】
【0002】
従来、移動台車上に動力散布装置を配設し、該移動台車下部に走行駆動可能に走行輪を配置した自走式の畦畔散布機は公知となっている。
ここで、特許文献1では前記自走式の畦畔散布機において、走行輪をモーターで駆動し、走行部に走行速度検知手段を設けるとともに、動力散布装置の薬剤タンク下部にシャッターを設け、該シャッターを開閉駆動する手段と該シャッターの開度を検知する手段を設け、該開閉駆動手段と開度検知手段と前記モーターと走行速度検知手段をそれぞれ制御部と接続し、走行に連動してシャッターを開閉可能な構成としている。
前記畦畔散布機では、まず該畦畔散布機の走行、停止に合わせて薬剤の散布を開始、終了することができる。次に、該畦畔散布機の走行速度に合わせて薬剤の吐出量を増減でき、均一な散布を可能としている。
さらに、特許文献1では前記畦畔散布機において、距離センサーを設けて圃場の側方端までの散布距離を検知し、散布する圃場の側方までの距離を自動的に検知して、その距離と走行速度に合わせた薬剤の散布量を調整でき、変形した圃場であっても均一な薬剤散布を可能としている。
【特許文献1】特開2005−803号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
前述の技術背景を踏まえ、畦畔散布装置においては、圃場に対し常に単位面積あたりの散布量が均一であることが望まれる。
しかし、特許文献1記載の畦畔散布装置は、薬剤散布開始時では動力散布機の出力、つまり、薬剤を吹き飛ばすためのファンの回転が安定するまでに時間を要するので、該出力安定までは均一に散布はできない。例えば、始動時の低出力では散布距離は短いので、前述した単位面積あたりの散布量は出力安定時のときより多く、薬剤が届かない面積も大きくなってしまう。
なお、ここで動力散布とは一般にエンジン又はモーターによる駆動としている。
そこで、解決しようとする課題は、前述した動力散布の始動時から出力安定時など動力散布の出力が安定しない間の単位面積あたりの散布量を均一にすることである。
【課題を解決するための手段】
【0004】
本発明の解決しようとする課題は以上の如くであり、次にこの課題を解決するための手段を説明する。
【0005】
即ち、請求項1においては、移動台車上に動力散布装置を配設し、該移動台車下部に走行駆動可能に走行輪を配置した自走式の畦畔散布機において、走行部に走行駆動手段と走行速度検知手段を設け、前記動力散布装置のスピンナーにスピンナー回転駆動手段と回転数検知手段を設け、前記動力散布装置の薬剤タンク下部に繰出駆動手段と繰出量検知手段を設けて、それぞれ制御部と接続し、前記走行速度とスピンナーの回転数と散布薬剤量を制御可能とするとともに、作業開始時に、スピンナーの回転数が設定回転に上昇するまで、繰出量を最小とするものである。
【0006】
請求項2においては、前記動力散布装置の散布スイッチと、走行駆動装置の走行スイッチと主スイッチと警報手段を制御部と接続し、該散布スイッチと走行スイッチが「入」の時に、主スイッチを「入」としても該動力散布装置と走行駆動手段は駆動しないように制御したことを特徴とした請求項1に記載の畦畔散布機である。
【発明の効果】
【0007】
本発明の効果として、以下に示すような効果を奏する。
【0008】
請求項1においては、自走式の畦畔散布装置において、動力散布起動時の低出力の状態でも均一に散布することができる。即ち、動力散布の起動時、安定時に係らず均一散布を実施できる。また、散布前の低出力による目詰まりも防止できる。
【0009】
請求項2においては、作業場所以外で主スイッチを「入」とした時に、急発進して薬剤を噴出することがなく、操作を誤っても警報によって作業者はその間違いを容易に認識することができる。
【発明を実施するための最良の形態】
【0010】
次に、発明の実施の形態を説明する。
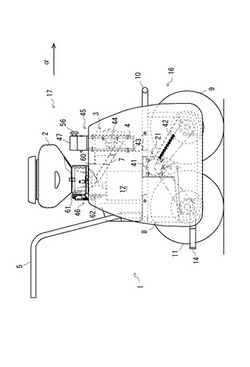
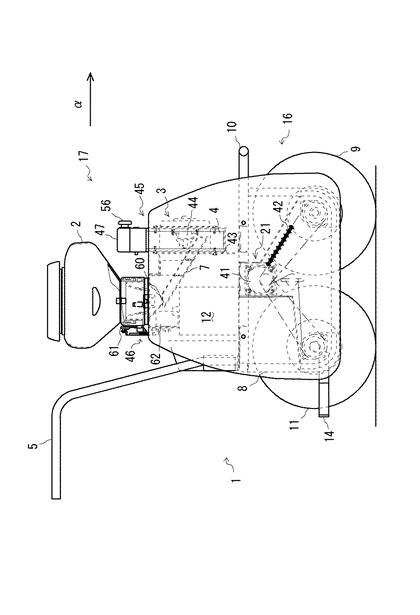
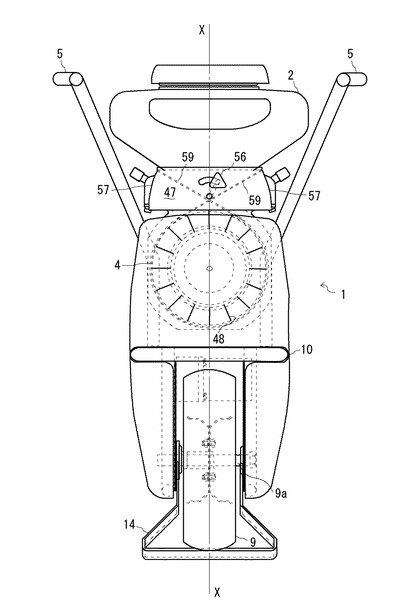
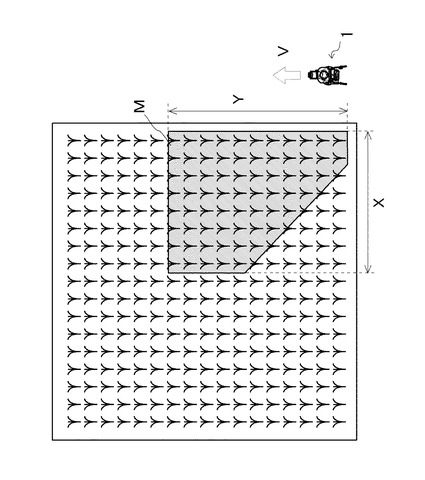
図1は本発明に係る畦畔散布機の側面図、図2は同じく平面図、図3は同じく正面図である。図4は実際の散布作業の概略を示した平面図、図5は本発明実施例に係る制御ブロック図である。
ここで、図1及び図3で示す矢印α方向が前方を示している。
なお、本実施形態では、動力散布装置である薬剤散布をモーター駆動による回転羽根(以下スピンナー)の回転にて行い、薬剤散布量の調整を薬剤タンク下部に設けたモーター駆動による切り欠きを設けた水平目皿の回転にて行い、走行をモーター駆動にて行う実施形態を示している。しかし、例えば駆動をモーターではなくエンジン出力で実施する場合も、本実施形態同様であることは言うまでもない。
【0011】
図1乃至図3より、畦畔散布機1の全体構成について説明する。
畦畔散布機1は、走行部となる自走台車16及び動力散布装置17により構成され、該動力散布装置17は自走台車16のフレーム10上後部に載置されている。従って、畦畔散布機1は走行可能な自走台車16上に動力散布装置17を配設するので、該動力散布装置17を作動させ、薬剤もしくは肥料を散布しながら、移動することができる。
【0012】
前記自走台車16では、フレーム10の後部に上後方へ伸びるハンドル5・5の基部を配設し、該ハンドル5近傍を操作部6(図符号なし)としている。
そして、前記自走台車16の下部には駆動輪である前輪9及び後輪11が配設されて、オペレータはハンドル5・5を持って、自走台車16の押し引き及び方向転換を行うよう構成されている。
また、移動台車16の中央部には走行駆動部21が構成されており、該走行駆動部21により前輪9及び後輪11を駆動できる構成になっている。
さらに、前後二輪で構成された自走台車16を立った状態に保持するために、スタンド14が後輪11の後部(または前輪9の前部)に設けられている。スタンド14は、背面視略U字状であり幾分裾広がりに形成されて安定性が付与される。
【0013】
ここで、畦畔散布機1について、走行部となる前記自走台車16の構成から詳細に説明する。
前述の如く自走台車16は、フレーム10、前輪9及び後輪11から構成されている。前輪9及び後輪11は移動台車16に夫々一輪ずつ備えられており、前輪9と後輪11が自走台車16の左右略中央で前後方向略同一直線(図2乃至図3の直線X−X)上に位置している。
該フレーム10は平面視口状に形成されていて、下部に側面視門状の下部フレーム8・8を接続している。
フレーム10には、車体後方から順に操作部6、バッテリー12、走行駆動部21、動力散布装置17が配設されている。また下部フレームは前輪軸9a、後輪軸11aを支持している。
【0014】
前記走行駆動部21は前部フレーム10の中央下部に固定された載置板13(図符号なし)上に配設されており、前輪9と後輪11の前に位置し、該走行駆動部21により該前輪9及び後輪11を駆動する構成としている。該走行駆動部21は走行モーター41やスプロケットやチェーン等を備え、バッテリー12の電力により走行モーター41を駆動し、該駆動力を駆動チェーン42・42により前輪軸9a及び後輪軸11aに伝達し、前輪9及び後輪11を回転駆動している。なお、バッテリー12の異常などを操作者に知らせるバッテリーチェッカー54がバッテリー12の上面に配置されているが、作業者が目視にて確認することができる位置ならば本実施形態の如く限定するものではない。
また、ここで走行駆動部21は前輪9と後輪11の両方を駆動する構成としているが、前後一方、または、両方をそれぞれ独立に駆動する構成とすることも可能である。
【0015】
ここで、走行駆動部21には、その出力である速度を検知する手段として走行速度検知センサー66が設けられており、検知した速度を制御部15に入力する。
さらに、前輪軸9a及び後輪軸11aはワンウェイクラッチを介して走行モーター41と連結されている。つまり、駆動輪の車軸はワンウェイクラッチを介して伝達される構成としている。
【0016】
次に、前記動力散布装置17について説明する。
プレートを折り曲げて構成した支持部材43が、フレーム10の前後中央部から車体後方に延設され、該支持部材43上に動力散布装置17を載置支持している。
動力散布装置17は、散布に必要な薬剤を適正量繰り出す繰出部46と、散布放出する散布部45から構成される。
【0017】
ここで散布部45において、軸心を前後水平方向に向けた円筒状のファンケース中央に散布モーター44を配設し、該散布モーター44の出力軸をファンケース内に挿入し、該出力軸上にスピンナー6を固設している。該スピンナー6は円盤状の回転体の一側面に均等角度ごとに中心から円周方向(半径方向)へ板状羽根48を立設し、前記散布モーター44の駆動によりスピンナー6を回転させて、薬剤を拡散羽根48部分に供給することにより、薬剤を放擲して散布することができる。
ここで、該散布モーター44は前記バッテリー12の電力によって駆動する。さらに、該散布部45にはその出力である回転数を検知するスピンナー回転数センサー65が設けられており、検知した回転数を制御部15に入力する。
また、前記ファンケースの上部左右両側には角管状の散布口57・57が斜め外上方に向けて開口され、該散布口57・57の基部のスピンナー6の上方に散布方向調節器55が配設されている。該散布方向調節器55の内部には、薬剤を左右それぞれの方向に誘導するための方向板59が配設されており、該方向板59は左右中央を回転軸に固定されて、該回転軸はツマミ56と連結されて、該ツマミ56を回動することにより方向板59の傾斜を変更して放擲方向を変更し、薬剤の左右散布方向を変更できるようにしている。
つまり、散布方向は散布モーター44の回転方向とツマミ56によって決定される。該散布モーター44の回転方向とツマミ56の回動を連動するように構成することもできる。
【0018】
また、繰出部46は車体の上方に突出した薬剤ホッパー2の下方かつ前記支持部材43の上方に配設され、該薬剤ホッパー2に充填された薬剤を設定量ずつ繰り出すことができる。該薬剤ホッパー2は上部に蓋を設け散布する薬剤を補給できるようになっている。
繰出部46では、繰出ケース61の底面に切り欠き又は穴の開いた水平目皿68を配設し、該水平目皿22の回転速度の調整によって、適量な薬剤を漏斗状の繰出口60に落下させる構成としている(繰出調整駆動部22)。この水平目皿69を用いた水平目皿式の繰り出し方法は、目皿の交換によって大きさの異なる薬剤にも対応できる。該繰出口60の下部には導入パイプ7が連通され、該導入パイプ7の下端はスピンナー6の中心部延設され、拡散羽根48の上部に薬剤が落下するようにしている。こうして繰出口60から落下した薬剤は導入パイプ7を通過して、前記散布部45に導かれる。ここで水平目皿68は、バッテリー12の電力によって駆動される繰出モーター62によって回転する。
なお、本実施形態では繰出部として水平目皿式としたが、例えば溝を設けたロールを回転させ繰出し量を調整する横溝ロール式や、単純にシャッターの開閉による繰り出し装置なども考えられ、繰り出し方法としては本実施形態に限定されることはない。
ここで、繰出部46の開度即ち回転数は検知手段として回転数センサー等の繰出量検知センサー67により検知される。詳しくは後述するが、繰出量調整駆動部22は制御部15と接続され、繰出量は逐一制御部15から出力される。
【実施例1】
【0019】
次に、本発明の実施例に係る散布作業の具体例を図4を用いて説明する。
前述したように、圃場での薬剤散布は単位面積あたりの散布量を均一にしなければならない。該単位面積あたりの散布量をmは、m=M/(X・Y)・・・・(1)で表すことができる。ここで、Xは動力散布Nに比例する散布距離、Yは走行距離、Mは実際の散布量即ち繰出量調整駆動部22にある水平目皿69の回転による繰出量を表している。つまり、単位面積あたりの散布量は実際の散布量を散布面積にて除した量にて表すことができる。
ここで、走行距離Yは、速度Vが一定であれば、単位時間あたりの変化量は一定である。
そこで、畦畔散布機が一定速度Vにて走行している場合では、式(1)中にてXは動力散布に比例する散布距離Xのみが変数となる。即ち、散布面積はXに依存する変化量となる。
そこで、単位面積あたりの散布量をmを一定にしようとするならば、実際の散布量Mを散布距離Xと走行速度Vに応じた変化量にすればよい。ここで、該変化量の決定は経験に応じた手段に基づく。
以上、実際の散布量を動力散布の出力と走行速度により決定することにより、均一な薬剤散布を実施することができる。
【0020】
ここで、作業開始時には、走行と散布を同時に開始しなければならないので、走行モーター41と散布モーター44を同時に起動するとバッテリー12からの電力供給が一時的に不足し、散布モーター44の回転数が不足して薬剤を所定量均一に散布することはできない。そこで、作業開始時において、散布モーター44が回転駆動された後であって、該散布モーター44の回転数を検知するスピンナー回転数センサー65の値が設定回転数よりも低いときには、繰出量調整駆動部22の水平目皿69の回転数を最小値とし、散布量を最小とする。つまり、散布作業開始時は最低の散布量は確保しておく。そして、散布モーター44の回転数が設定値まで達すると繰出量調整駆動部22の水平目皿69の回転数を設定値まで回転させるのである。更に、走行速度も散布モーター44が設定回転数に上昇するまでは、最低速度(微速)として、散布モーター44が設定回転数に上昇すると、設定速度にまで上昇させ、作業時は散布モーター44の回転数は設定回転として、繰出量調整駆動部22の水平目皿69の回転数と走行速度が比例するように駆動する。
【0021】
従来は、作業開始時において、散布モーター44と走行モーター41を同時に起動したときには、両者の回転数が設定回転数に達するのに時間がかかり、散布ムラも生じていた。ここで、両者起動時の不安定なときには散布量も走行速度も小さくして散布ムラの面積を最小限として、散布モーター44の回転数が設定回転に安定したので、設定速度で走行して均一に散布できる面積をできるだけ大きくすることができた。
【0022】
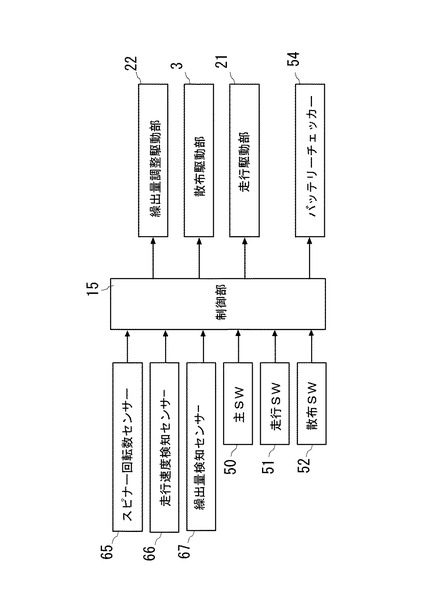
前述の具体例の制御ブロック図を図5に示す。
即ち、動力散布の出力として散布駆動部3の回転軸部に設けたスピンナー回転数センサー65にて検知した回転数と、走行速度として走行駆動部21の回転軸部に設けた走行速度検知センサー66にて検知した回転数を制御部15に送り、それらを踏まえ適正な繰出量となるように繰出量調整駆動部22にて水平目皿69の回転量を調整する。
以上の制御方法によって、例えば散布駆動部3の起動時にて出力が低く安定しないときは、該低出力に応じた少ない散布量が供給され、期待した単位面積あたりの薬剤散布を実現できる。このことは、散布駆動部3が低出力であるのに過剰供給となった薬剤が目詰まりを起こすことも防止できる。
【実施例2】
【0023】
次に、走行駆動の実施例について説明する。
まず、走行駆動部21から駆動チェーン42・42を介して前輪9及び後輪11を駆動すると、2輪駆動となり悪路などでの駆動力を高めることができ、走行を安定させることができる。さらに、後輪11と後輪軸11aの間にワンウェイクラッチを介していることにより、前輪9を持ち上げることで、後輪11のみにて手押しにて移動することが可能である。つまり、前輪9は走行駆動部21と連動連結されているので、走行駆動部21で歯車が噛み合っていると自由に回転できないことがあるが、ワンウェイクラッチで空回りさせることにより、後輪11のみで前進させることができるのである。さらに、後輪11のみ接地させていれば、1点で接地して接地抵抗が小さいため方向転換も容易にできる。
【実施例3】
【0024】
さらに、本発明の実施例に係る操作の具体例を説明する。
畦畔散布機1において、動力散布機である散布駆動部3の散布スイッチ51と、走行駆動部21の走行スイッチ52を制御部15設け、畦畔散布機1本体の主スイッチ50を同じく制御部15に設けた構成とする。
ここで、前記送風駆動部3の散布スイッチ51と、前記走行駆動部21の走行スイッチ52が入であった場合で、前記主スイッチ50を入としても、送風駆動部3と走行駆動部21は駆動させずに、バッテリー上面にある警報手段としてのバッテリーチェッカー54の警告ランプを点灯または点滅することにする。但し、警報手段としてブザーやスピーカによる音等で構成することもでき、限定するものではない。
【0025】
つまり、畦畔散布機1の運転の際には、1次側スイッチである主スイッチ50、2次側スイッチである散布駆動部3の散布スイッチ51と走行駆動部21の走行スイッチ52において、1次スイッチ、2次スイッチの順にスイッチを入れることを規則化し、それ以外は運転できない構成とする。
これによって、散布スイッチ51または走行スイッチ52を「入」としたまま主スイッチ50を「切」として、作業を中止したり、格納したりした場合、主スイッチ50を「入」としたときに急に発進したり、薬剤が散布されたりすることなく、作業者にランプの点滅等で容易に誤操作したことが判るようになる。
【図面の簡単な説明】
【0026】
【図1】本発明に係る畦畔散布機の側面図。
【図2】同じく平面図。
【図3】同じく正面図。
【図4】実際の散布作業の概略を示した平面図。
【図5】本発明実施例に係る制御ブロック図。
【符号の説明】
【0027】
1 畦畔散布機
15 制御部
65 スピンナー回転数センサー
66 走行速度検知センサー
【技術分野】
【0001】
本発明は、動力散布装置を移動台車に搭載した畦畔散布機の技術に関する。
【背景技術】
【0002】
従来、移動台車上に動力散布装置を配設し、該移動台車下部に走行駆動可能に走行輪を配置した自走式の畦畔散布機は公知となっている。
ここで、特許文献1では前記自走式の畦畔散布機において、走行輪をモーターで駆動し、走行部に走行速度検知手段を設けるとともに、動力散布装置の薬剤タンク下部にシャッターを設け、該シャッターを開閉駆動する手段と該シャッターの開度を検知する手段を設け、該開閉駆動手段と開度検知手段と前記モーターと走行速度検知手段をそれぞれ制御部と接続し、走行に連動してシャッターを開閉可能な構成としている。
前記畦畔散布機では、まず該畦畔散布機の走行、停止に合わせて薬剤の散布を開始、終了することができる。次に、該畦畔散布機の走行速度に合わせて薬剤の吐出量を増減でき、均一な散布を可能としている。
さらに、特許文献1では前記畦畔散布機において、距離センサーを設けて圃場の側方端までの散布距離を検知し、散布する圃場の側方までの距離を自動的に検知して、その距離と走行速度に合わせた薬剤の散布量を調整でき、変形した圃場であっても均一な薬剤散布を可能としている。
【特許文献1】特開2005−803号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
前述の技術背景を踏まえ、畦畔散布装置においては、圃場に対し常に単位面積あたりの散布量が均一であることが望まれる。
しかし、特許文献1記載の畦畔散布装置は、薬剤散布開始時では動力散布機の出力、つまり、薬剤を吹き飛ばすためのファンの回転が安定するまでに時間を要するので、該出力安定までは均一に散布はできない。例えば、始動時の低出力では散布距離は短いので、前述した単位面積あたりの散布量は出力安定時のときより多く、薬剤が届かない面積も大きくなってしまう。
なお、ここで動力散布とは一般にエンジン又はモーターによる駆動としている。
そこで、解決しようとする課題は、前述した動力散布の始動時から出力安定時など動力散布の出力が安定しない間の単位面積あたりの散布量を均一にすることである。
【課題を解決するための手段】
【0004】
本発明の解決しようとする課題は以上の如くであり、次にこの課題を解決するための手段を説明する。
【0005】
即ち、請求項1においては、移動台車上に動力散布装置を配設し、該移動台車下部に走行駆動可能に走行輪を配置した自走式の畦畔散布機において、走行部に走行駆動手段と走行速度検知手段を設け、前記動力散布装置のスピンナーにスピンナー回転駆動手段と回転数検知手段を設け、前記動力散布装置の薬剤タンク下部に繰出駆動手段と繰出量検知手段を設けて、それぞれ制御部と接続し、前記走行速度とスピンナーの回転数と散布薬剤量を制御可能とするとともに、作業開始時に、スピンナーの回転数が設定回転に上昇するまで、繰出量を最小とするものである。
【0006】
請求項2においては、前記動力散布装置の散布スイッチと、走行駆動装置の走行スイッチと主スイッチと警報手段を制御部と接続し、該散布スイッチと走行スイッチが「入」の時に、主スイッチを「入」としても該動力散布装置と走行駆動手段は駆動しないように制御したことを特徴とした請求項1に記載の畦畔散布機である。
【発明の効果】
【0007】
本発明の効果として、以下に示すような効果を奏する。
【0008】
請求項1においては、自走式の畦畔散布装置において、動力散布起動時の低出力の状態でも均一に散布することができる。即ち、動力散布の起動時、安定時に係らず均一散布を実施できる。また、散布前の低出力による目詰まりも防止できる。
【0009】
請求項2においては、作業場所以外で主スイッチを「入」とした時に、急発進して薬剤を噴出することがなく、操作を誤っても警報によって作業者はその間違いを容易に認識することができる。
【発明を実施するための最良の形態】
【0010】
次に、発明の実施の形態を説明する。
図1は本発明に係る畦畔散布機の側面図、図2は同じく平面図、図3は同じく正面図である。図4は実際の散布作業の概略を示した平面図、図5は本発明実施例に係る制御ブロック図である。
ここで、図1及び図3で示す矢印α方向が前方を示している。
なお、本実施形態では、動力散布装置である薬剤散布をモーター駆動による回転羽根(以下スピンナー)の回転にて行い、薬剤散布量の調整を薬剤タンク下部に設けたモーター駆動による切り欠きを設けた水平目皿の回転にて行い、走行をモーター駆動にて行う実施形態を示している。しかし、例えば駆動をモーターではなくエンジン出力で実施する場合も、本実施形態同様であることは言うまでもない。
【0011】
図1乃至図3より、畦畔散布機1の全体構成について説明する。
畦畔散布機1は、走行部となる自走台車16及び動力散布装置17により構成され、該動力散布装置17は自走台車16のフレーム10上後部に載置されている。従って、畦畔散布機1は走行可能な自走台車16上に動力散布装置17を配設するので、該動力散布装置17を作動させ、薬剤もしくは肥料を散布しながら、移動することができる。
【0012】
前記自走台車16では、フレーム10の後部に上後方へ伸びるハンドル5・5の基部を配設し、該ハンドル5近傍を操作部6(図符号なし)としている。
そして、前記自走台車16の下部には駆動輪である前輪9及び後輪11が配設されて、オペレータはハンドル5・5を持って、自走台車16の押し引き及び方向転換を行うよう構成されている。
また、移動台車16の中央部には走行駆動部21が構成されており、該走行駆動部21により前輪9及び後輪11を駆動できる構成になっている。
さらに、前後二輪で構成された自走台車16を立った状態に保持するために、スタンド14が後輪11の後部(または前輪9の前部)に設けられている。スタンド14は、背面視略U字状であり幾分裾広がりに形成されて安定性が付与される。
【0013】
ここで、畦畔散布機1について、走行部となる前記自走台車16の構成から詳細に説明する。
前述の如く自走台車16は、フレーム10、前輪9及び後輪11から構成されている。前輪9及び後輪11は移動台車16に夫々一輪ずつ備えられており、前輪9と後輪11が自走台車16の左右略中央で前後方向略同一直線(図2乃至図3の直線X−X)上に位置している。
該フレーム10は平面視口状に形成されていて、下部に側面視門状の下部フレーム8・8を接続している。
フレーム10には、車体後方から順に操作部6、バッテリー12、走行駆動部21、動力散布装置17が配設されている。また下部フレームは前輪軸9a、後輪軸11aを支持している。
【0014】
前記走行駆動部21は前部フレーム10の中央下部に固定された載置板13(図符号なし)上に配設されており、前輪9と後輪11の前に位置し、該走行駆動部21により該前輪9及び後輪11を駆動する構成としている。該走行駆動部21は走行モーター41やスプロケットやチェーン等を備え、バッテリー12の電力により走行モーター41を駆動し、該駆動力を駆動チェーン42・42により前輪軸9a及び後輪軸11aに伝達し、前輪9及び後輪11を回転駆動している。なお、バッテリー12の異常などを操作者に知らせるバッテリーチェッカー54がバッテリー12の上面に配置されているが、作業者が目視にて確認することができる位置ならば本実施形態の如く限定するものではない。
また、ここで走行駆動部21は前輪9と後輪11の両方を駆動する構成としているが、前後一方、または、両方をそれぞれ独立に駆動する構成とすることも可能である。
【0015】
ここで、走行駆動部21には、その出力である速度を検知する手段として走行速度検知センサー66が設けられており、検知した速度を制御部15に入力する。
さらに、前輪軸9a及び後輪軸11aはワンウェイクラッチを介して走行モーター41と連結されている。つまり、駆動輪の車軸はワンウェイクラッチを介して伝達される構成としている。
【0016】
次に、前記動力散布装置17について説明する。
プレートを折り曲げて構成した支持部材43が、フレーム10の前後中央部から車体後方に延設され、該支持部材43上に動力散布装置17を載置支持している。
動力散布装置17は、散布に必要な薬剤を適正量繰り出す繰出部46と、散布放出する散布部45から構成される。
【0017】
ここで散布部45において、軸心を前後水平方向に向けた円筒状のファンケース中央に散布モーター44を配設し、該散布モーター44の出力軸をファンケース内に挿入し、該出力軸上にスピンナー6を固設している。該スピンナー6は円盤状の回転体の一側面に均等角度ごとに中心から円周方向(半径方向)へ板状羽根48を立設し、前記散布モーター44の駆動によりスピンナー6を回転させて、薬剤を拡散羽根48部分に供給することにより、薬剤を放擲して散布することができる。
ここで、該散布モーター44は前記バッテリー12の電力によって駆動する。さらに、該散布部45にはその出力である回転数を検知するスピンナー回転数センサー65が設けられており、検知した回転数を制御部15に入力する。
また、前記ファンケースの上部左右両側には角管状の散布口57・57が斜め外上方に向けて開口され、該散布口57・57の基部のスピンナー6の上方に散布方向調節器55が配設されている。該散布方向調節器55の内部には、薬剤を左右それぞれの方向に誘導するための方向板59が配設されており、該方向板59は左右中央を回転軸に固定されて、該回転軸はツマミ56と連結されて、該ツマミ56を回動することにより方向板59の傾斜を変更して放擲方向を変更し、薬剤の左右散布方向を変更できるようにしている。
つまり、散布方向は散布モーター44の回転方向とツマミ56によって決定される。該散布モーター44の回転方向とツマミ56の回動を連動するように構成することもできる。
【0018】
また、繰出部46は車体の上方に突出した薬剤ホッパー2の下方かつ前記支持部材43の上方に配設され、該薬剤ホッパー2に充填された薬剤を設定量ずつ繰り出すことができる。該薬剤ホッパー2は上部に蓋を設け散布する薬剤を補給できるようになっている。
繰出部46では、繰出ケース61の底面に切り欠き又は穴の開いた水平目皿68を配設し、該水平目皿22の回転速度の調整によって、適量な薬剤を漏斗状の繰出口60に落下させる構成としている(繰出調整駆動部22)。この水平目皿69を用いた水平目皿式の繰り出し方法は、目皿の交換によって大きさの異なる薬剤にも対応できる。該繰出口60の下部には導入パイプ7が連通され、該導入パイプ7の下端はスピンナー6の中心部延設され、拡散羽根48の上部に薬剤が落下するようにしている。こうして繰出口60から落下した薬剤は導入パイプ7を通過して、前記散布部45に導かれる。ここで水平目皿68は、バッテリー12の電力によって駆動される繰出モーター62によって回転する。
なお、本実施形態では繰出部として水平目皿式としたが、例えば溝を設けたロールを回転させ繰出し量を調整する横溝ロール式や、単純にシャッターの開閉による繰り出し装置なども考えられ、繰り出し方法としては本実施形態に限定されることはない。
ここで、繰出部46の開度即ち回転数は検知手段として回転数センサー等の繰出量検知センサー67により検知される。詳しくは後述するが、繰出量調整駆動部22は制御部15と接続され、繰出量は逐一制御部15から出力される。
【実施例1】
【0019】
次に、本発明の実施例に係る散布作業の具体例を図4を用いて説明する。
前述したように、圃場での薬剤散布は単位面積あたりの散布量を均一にしなければならない。該単位面積あたりの散布量をmは、m=M/(X・Y)・・・・(1)で表すことができる。ここで、Xは動力散布Nに比例する散布距離、Yは走行距離、Mは実際の散布量即ち繰出量調整駆動部22にある水平目皿69の回転による繰出量を表している。つまり、単位面積あたりの散布量は実際の散布量を散布面積にて除した量にて表すことができる。
ここで、走行距離Yは、速度Vが一定であれば、単位時間あたりの変化量は一定である。
そこで、畦畔散布機が一定速度Vにて走行している場合では、式(1)中にてXは動力散布に比例する散布距離Xのみが変数となる。即ち、散布面積はXに依存する変化量となる。
そこで、単位面積あたりの散布量をmを一定にしようとするならば、実際の散布量Mを散布距離Xと走行速度Vに応じた変化量にすればよい。ここで、該変化量の決定は経験に応じた手段に基づく。
以上、実際の散布量を動力散布の出力と走行速度により決定することにより、均一な薬剤散布を実施することができる。
【0020】
ここで、作業開始時には、走行と散布を同時に開始しなければならないので、走行モーター41と散布モーター44を同時に起動するとバッテリー12からの電力供給が一時的に不足し、散布モーター44の回転数が不足して薬剤を所定量均一に散布することはできない。そこで、作業開始時において、散布モーター44が回転駆動された後であって、該散布モーター44の回転数を検知するスピンナー回転数センサー65の値が設定回転数よりも低いときには、繰出量調整駆動部22の水平目皿69の回転数を最小値とし、散布量を最小とする。つまり、散布作業開始時は最低の散布量は確保しておく。そして、散布モーター44の回転数が設定値まで達すると繰出量調整駆動部22の水平目皿69の回転数を設定値まで回転させるのである。更に、走行速度も散布モーター44が設定回転数に上昇するまでは、最低速度(微速)として、散布モーター44が設定回転数に上昇すると、設定速度にまで上昇させ、作業時は散布モーター44の回転数は設定回転として、繰出量調整駆動部22の水平目皿69の回転数と走行速度が比例するように駆動する。
【0021】
従来は、作業開始時において、散布モーター44と走行モーター41を同時に起動したときには、両者の回転数が設定回転数に達するのに時間がかかり、散布ムラも生じていた。ここで、両者起動時の不安定なときには散布量も走行速度も小さくして散布ムラの面積を最小限として、散布モーター44の回転数が設定回転に安定したので、設定速度で走行して均一に散布できる面積をできるだけ大きくすることができた。
【0022】
前述の具体例の制御ブロック図を図5に示す。
即ち、動力散布の出力として散布駆動部3の回転軸部に設けたスピンナー回転数センサー65にて検知した回転数と、走行速度として走行駆動部21の回転軸部に設けた走行速度検知センサー66にて検知した回転数を制御部15に送り、それらを踏まえ適正な繰出量となるように繰出量調整駆動部22にて水平目皿69の回転量を調整する。
以上の制御方法によって、例えば散布駆動部3の起動時にて出力が低く安定しないときは、該低出力に応じた少ない散布量が供給され、期待した単位面積あたりの薬剤散布を実現できる。このことは、散布駆動部3が低出力であるのに過剰供給となった薬剤が目詰まりを起こすことも防止できる。
【実施例2】
【0023】
次に、走行駆動の実施例について説明する。
まず、走行駆動部21から駆動チェーン42・42を介して前輪9及び後輪11を駆動すると、2輪駆動となり悪路などでの駆動力を高めることができ、走行を安定させることができる。さらに、後輪11と後輪軸11aの間にワンウェイクラッチを介していることにより、前輪9を持ち上げることで、後輪11のみにて手押しにて移動することが可能である。つまり、前輪9は走行駆動部21と連動連結されているので、走行駆動部21で歯車が噛み合っていると自由に回転できないことがあるが、ワンウェイクラッチで空回りさせることにより、後輪11のみで前進させることができるのである。さらに、後輪11のみ接地させていれば、1点で接地して接地抵抗が小さいため方向転換も容易にできる。
【実施例3】
【0024】
さらに、本発明の実施例に係る操作の具体例を説明する。
畦畔散布機1において、動力散布機である散布駆動部3の散布スイッチ51と、走行駆動部21の走行スイッチ52を制御部15設け、畦畔散布機1本体の主スイッチ50を同じく制御部15に設けた構成とする。
ここで、前記送風駆動部3の散布スイッチ51と、前記走行駆動部21の走行スイッチ52が入であった場合で、前記主スイッチ50を入としても、送風駆動部3と走行駆動部21は駆動させずに、バッテリー上面にある警報手段としてのバッテリーチェッカー54の警告ランプを点灯または点滅することにする。但し、警報手段としてブザーやスピーカによる音等で構成することもでき、限定するものではない。
【0025】
つまり、畦畔散布機1の運転の際には、1次側スイッチである主スイッチ50、2次側スイッチである散布駆動部3の散布スイッチ51と走行駆動部21の走行スイッチ52において、1次スイッチ、2次スイッチの順にスイッチを入れることを規則化し、それ以外は運転できない構成とする。
これによって、散布スイッチ51または走行スイッチ52を「入」としたまま主スイッチ50を「切」として、作業を中止したり、格納したりした場合、主スイッチ50を「入」としたときに急に発進したり、薬剤が散布されたりすることなく、作業者にランプの点滅等で容易に誤操作したことが判るようになる。
【図面の簡単な説明】
【0026】
【図1】本発明に係る畦畔散布機の側面図。
【図2】同じく平面図。
【図3】同じく正面図。
【図4】実際の散布作業の概略を示した平面図。
【図5】本発明実施例に係る制御ブロック図。
【符号の説明】
【0027】
1 畦畔散布機
15 制御部
65 スピンナー回転数センサー
66 走行速度検知センサー
【特許請求の範囲】
【請求項1】
移動台車上に動力散布装置を配設し、該移動台車下部に走行駆動可能に走行輪を配置した自走式の畦畔散布機において、
走行部に走行駆動手段と走行速度検知手段を設け、前記動力散布装置のスピンナーにスピンナー回転駆動手段と回転数検知手段を設け、前記動力散布装置の薬剤タンク下部に繰出駆動手段と繰出量検知手段を設けて、それぞれ制御部と接続し、前記走行速度とスピンナーの回転数と散布薬剤量を制御可能とするとともに、作業開始時に、スピンナーの回転数が設定回転に上昇するまで、繰出量を最小とすることを特徴とする畦畔散布機。
【請求項2】
前記動力散布装置の散布スイッチと、走行駆動装置の走行スイッチと主スイッチと警報手段を制御部と接続し、該散布スイッチと走行スイッチが「入」の時に、主スイッチを「入」としても該動力散布装置と走行駆動手段は駆動しないように制御したことを特徴とした請求項1に記載の畦畔散布機。
【請求項1】
移動台車上に動力散布装置を配設し、該移動台車下部に走行駆動可能に走行輪を配置した自走式の畦畔散布機において、
走行部に走行駆動手段と走行速度検知手段を設け、前記動力散布装置のスピンナーにスピンナー回転駆動手段と回転数検知手段を設け、前記動力散布装置の薬剤タンク下部に繰出駆動手段と繰出量検知手段を設けて、それぞれ制御部と接続し、前記走行速度とスピンナーの回転数と散布薬剤量を制御可能とするとともに、作業開始時に、スピンナーの回転数が設定回転に上昇するまで、繰出量を最小とすることを特徴とする畦畔散布機。
【請求項2】
前記動力散布装置の散布スイッチと、走行駆動装置の走行スイッチと主スイッチと警報手段を制御部と接続し、該散布スイッチと走行スイッチが「入」の時に、主スイッチを「入」としても該動力散布装置と走行駆動手段は駆動しないように制御したことを特徴とした請求項1に記載の畦畔散布機。
【図1】


【図2】
【図3】

【図4】
【図5】
【図2】
【図3】
【図4】
【図5】
【公開番号】特開2008−272717(P2008−272717A)
【公開日】平成20年11月13日(2008.11.13)
【国際特許分類】
【出願番号】特願2007−122887(P2007−122887)
【出願日】平成19年5月7日(2007.5.7)
【新規性喪失の例外の表示】特許法第30条第1項適用申請有り 発行者名 独立行政法人農業・食品産業技術総合研究機構 生物系特定産業技術研究支援センター 刊行物名 平成18年度事業報告 発行年月日 平成19年3月1日
【出願人】(390029621)ニューデルタ工業株式会社 (55)
【出願人】(000006851)ヤンマー農機株式会社 (132)
【出願人】(501203344)独立行政法人農業・食品産業技術総合研究機構 (827)
【Fターム(参考)】
【公開日】平成20年11月13日(2008.11.13)
【国際特許分類】
【出願日】平成19年5月7日(2007.5.7)
【新規性喪失の例外の表示】特許法第30条第1項適用申請有り 発行者名 独立行政法人農業・食品産業技術総合研究機構 生物系特定産業技術研究支援センター 刊行物名 平成18年度事業報告 発行年月日 平成19年3月1日
【出願人】(390029621)ニューデルタ工業株式会社 (55)
【出願人】(000006851)ヤンマー農機株式会社 (132)
【出願人】(501203344)独立行政法人農業・食品産業技術総合研究機構 (827)
【Fターム(参考)】
[ Back to top ]