
異常時対応運転制御の要否判定方法および異常時対応運転制御の要否判定に基づく運転制御装置
【課題】運転者の体調に異常があるときに実行する異常時対応運転制御の要否を的確に判定する方法を提供し、また該判定を異常時対応運転制御の的確な始動+に生かす。。
【解決手段】運転者の体調に異常があるときに実行する異常時対応運転制御の要否を運転者の体より及ぼされる押圧力に基づいて判定し、その際、運転者の姿勢の特徴に応じて要否判定を異ならせる。押圧力としては、運転者の脊部より及ぼされる押圧力、臀部より及ぼされる押圧力、左足より及ぼされる押圧力の3者から選択された押圧力を使用する。運転者による異常時対応運転制御の始動は、上記の要否判定が要と判定されたとき許可する。
【解決手段】運転者の体調に異常があるときに実行する異常時対応運転制御の要否を運転者の体より及ぼされる押圧力に基づいて判定し、その際、運転者の姿勢の特徴に応じて要否判定を異ならせる。押圧力としては、運転者の脊部より及ぼされる押圧力、臀部より及ぼされる押圧力、左足より及ぼされる押圧力の3者から選択された押圧力を使用する。運転者による異常時対応運転制御の始動は、上記の要否判定が要と判定されたとき許可する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、自動車等の車輌の運転者の体調に正常な運転を妨げる異変が生じたとき、異常時対応運転制御を行うべきか否かを判定する方法および該判定に基づいて作動する運転制御装置に係る。
【背景技術】
【0002】
自動車等の車輌の運転者の体調に異変が生じたとき、それを運転席上に於ける運転者の姿勢から検出することが、下記の特許文献に記載されている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2002-19555号公報
【特許文献2】特開2008-105607号公報
【特許文献3】特開2003-339681号公報
【0004】
上記の特許文献1には、その図5に示されている如く、運転席の座部を前後左右の四隅にて下方より少なくとも4個の荷重センサにより支持し、これらの荷重センサにより運転席に着座した運転者の体重とともに重心位置を検出することが記載されている。上記の特許文献2には、運転席のシートバック、アームレスト、ヘッドレスト、フットレストに荷重センサを設け、これらの荷重センサにより運転席に着座した運転者の身体挙動に基づいてシートポジションを変更することが記載されている。上記の特許文献3には、運転者の身体状態および心理状態の少なくとも一方の状態が運転に支障をきたす状態となったことを運転者にシンボルマークにて知らせる装置が提案されており、それを作動させるに当って運転者の身体の動きを検出する手段として、図2に示されている如き圧力センサ13を座席に設けることが記載されている。
【発明の概要】
【発明が解決しようとする課題】
【0005】
近年、自動制御技術の発展に伴い、自動車等の車輌の運転中に運転者の体調に不良を来たしたとき、運転者の運転操作を自動制御装置によりアシストすることについて種々の研究や発明がなされている。この場合、自動制御装置によるアシスト操作は、運転者の運転操作に介入してそれに変更を加えることになるので、過度に行われてはならず、そのためには、運転者の体調不良を如何に的確に判定するかが一つの重要な課題になると考えられる。
【0006】
本発明は、上記の事情に着目し、運転者の体調に異常がある場合に実行する異常時対応運転制御の要否を的確に判定する方法、およびそのような判定に基づいて的確な制御を実行する運転制御装置を提供することを課題としている。
【課題を解決するための手段】
【0007】
上記の課題を解決するため、本発明は、運転者の体調に異常があるときに実行する異常時対応運転制御の要否を運転者の体より及ぼされる押圧力に基づいて判定し、その際、運転者の姿勢の特徴に応じて要否判定を異ならせることを特徴とする要否判定方法を提案するものである。
【0008】
前記押圧力は、運転者の脊部より及ぼされる押圧力、臀部より及ぼされる押圧力、左足より及ぼされる押圧力の3者から選択された押圧力であってよい。
【0009】
前記要否判定は、運転者の脊部より及ぼされる押圧力、臀部より及ぼされる押圧力、左足より及ぼされる押圧力の3者から選択された複数の押圧力を組み合わせて行われてよい。この場合、運転者の脊部より及ぼされる押圧力、臀部より及ぼされる押圧力、左足より及ぼされる押圧力の3者から選択された複数の押圧力を組み合わせるに当たって、各押圧力に対して相対的な重み付けが行われてよい。
【0010】
前記要否判定は、前記押圧力の時間経過に伴う変化の周波数解析に基づいて行われてよい。
【0011】
運転者の臀部より及ぼされる押圧力は、該臀部が着座する座部内に分散配置された複数の点状センサにより検出されるようになっていてよい。この場合、複数の点状センサによる押圧力の検出に際し、該点状センサの感度に応じて座部のクッション性が調整されるようになっていてよい。座部のクッション性は、座部内に組み込まれて電気的に硬さが変る硬さ調整部材の電気的制御により行われるようになっていてよい。
【0012】
運転者の体より及ぼされる押圧力に基づく運転者の姿勢の判定は、運転者の臀部によるシート荷重の平均荷重形状により行われてもよい。
【0013】
また上記の課題を解決するため、本発明は、上記の如き方法による要否判定に基づいて異常時対応運転制御を実行する運転制御装置であって、前記要否判定の結果、異常時対応運転制御を開始すべきと判定したとき、運転者による異常時対応運転制御の開始を許可するようになっていることを特徴とする運転制御装置を提案するものである。
【0014】
上記の如き運転制御装置は、運転者による異常時対応運転制御の開始を許可したとき運転者に異常時対応運転制御を開始させるスイッチ手段を有していてよく、また運転者による異常時対応運転制御の開始を許可したとき、運転者に異常時対応運転制御の開始を促すようになっていてよい。
【0015】
また上記の如き運転制御装置は、運転者が過緊張状態にあるか否かを判定し、運転者が過緊張状態にあるときには、運転者による運転操作が異常時対応運転制御にオーバーライドすることを許可しないようになっていてよい。運転者が過緊張状態にあるか否かの判定は、ステアリングホイールに極小さなテスト用トルクを作用させ、それに対する運転者の反応を見ることにより行われてよい。
【発明の効果】
【0016】
運転者の体調に異常があるときに実行する異常時対応運転制御の要否を運転者の体より及ぼされる押圧力に基づいて判定し、その際、運転者の姿勢の特徴に応じて要否判定を異ならせるようにすれば、以下の実施例についての説明より明らかとなる通り、運転者の体調異常に対する異常時対応運転制御の要否を的確に判定することができる。
【0017】
また上記の如き運転者の体調異常に対する異常時対応運転制御の要否の判定に基づいて異常時対応運転制御を実行する運転制御装置が、前記要否判定の結果、異常時対応運転制御を開始すべきと判定した場合には、運転者による異常時対応運転制御の開始を許可するようになっていれば、運転者が体調異常時に異常時対応運転制御を開始させるために操作する押しボタン等の異常時対応運転制御始動手段を、運転者が体調に異常を来たしたときにも容易に操作できるよう、ステアリングホール周りの運転者の手が届き易い位置に設けておいても、運転者の体調が正常な通常の運転時に、それが誤って操作されることにより、異常時対応運転制御が誤って始動されることを確実に防止することができる。
【図面の簡単な説明】
【0018】
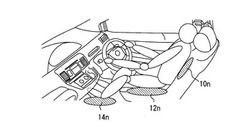
【図1】運転者の体調が正常であるときの運転状態示す自動車の運転席部の部分斜視図。
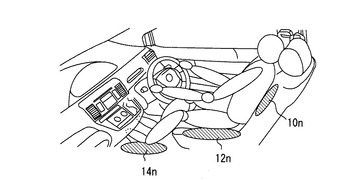
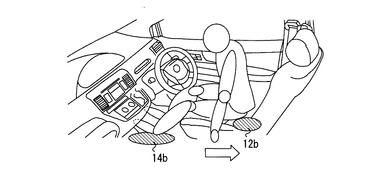
【図2】運転者が体調異常により前のめりの姿勢になった状態を示す自動車の運転席部の部分斜視図。
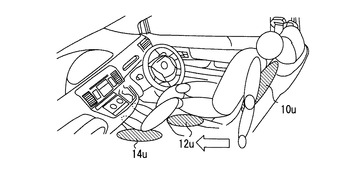
【図3】運転者が体調異常により仰向けの姿勢になった状態を示す自動車の運転席部の部分斜視図。
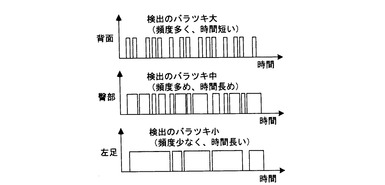
【図4】運転者の体調が正常であるとき、背部センサ、臀部センサ、左足センサの検出値が時間の経過につれて変化する態様の例を示すグラフ。
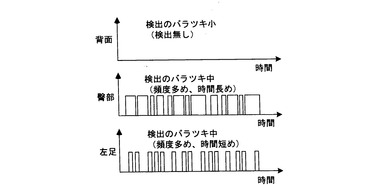
【図5】運転者が体調異常により前のめりの姿勢になったとき、背部センサ、臀部センサ、左足センサの検出値が時間の経過につれて変化する態様の例を示すグラフ。
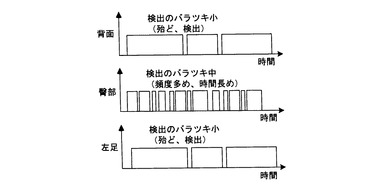
【図6】運転者が体調異常により仰向けの姿勢になったとき、背部センサ、臀部センサ、左足センサの検出値が時間の経過につれて変化する態様の例を示すグラフ。
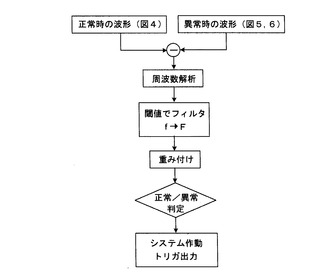
【図7】背部センサ、臀部センサ、左足センサの検出値が時間の経過につれて変化する態様の変化を捉えることにより運転者の体調異常を検出する過程を示すフローチャート。
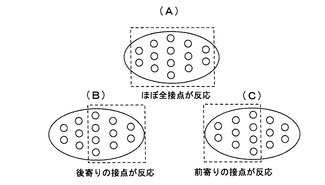
【図8】運転席の座部に分散して配置された点状センサの反応を運転者が正常な姿勢の状態にあるとき(A)、前のめりの姿勢にあるとき(B)、仰向けの姿勢にあるとき(C)について示す概略図。
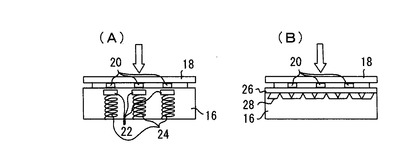
【図9】座部に点状センサを分散して配置する構造の2例を示す幾分解図的断面図。
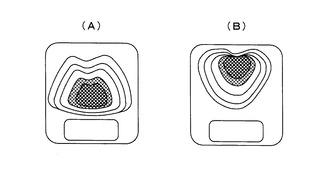
【図10】座部に於ける荷重分布を運転者が正常な姿勢にあるとき(A)と仰向けの姿勢にあるとき(B)について示す概略図。
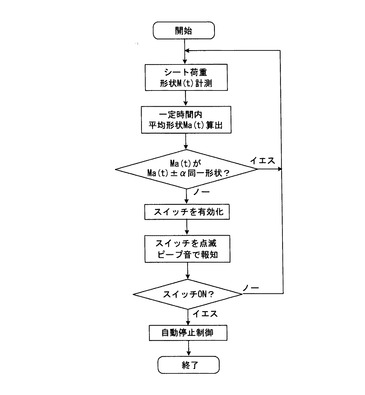
【図11】図10のA、Bに示すような座部に於ける荷重分布を解析する演算処理を示すフローチャート。
【図12】運転者の体調異常による異常時対応運転制御の要否判定により異常時対応運転制御を作動させる一つの構成を示すブロック図。
【図13】運転者の体調異常による異常時対応運転制御の要否判定により異常時対応運転制御を作動させる他の一つの構成のを示すブロック図。
【図14】操舵装置の一部内に組み込まれた図には示されていない操舵角修正用のモータを作動させてステアリングホイールに極小さなテスト用トルクを作用させる要領を示す概略図。
【図15】運転者が過緊張状態にあるか否かを判定してオーバーライドを選択する要領を示すフローチャート。
【図16】操舵装置よりテスト用トルクをステアリングホイール作用させ、それに対し運転者が反応し、それによって操舵輪へ向けて出力される操舵トルクに生ずる変動を運転者の体調が正常であるとき(A)、運転者が過緊張状態にあるとき(B)、運転者が弛緩状態にあるとき(C)について例示するグラフ。
【図17】車輌左折時に運転者に作用する遠心力により臀部が座部の左右の部分に及ぼす押圧力に生ずる偏倚を示す説明図(A)および車輌右旋回時に臀部が座部の左右の部分に及ぼす押圧力に生ずる偏倚を示す説明図(B)。
【図18】種々の判定を行う制御装置の構成を示すブロック図。
【発明を実施するための形態】
【0019】
図1は、運転者の体調が正常であるときの運転状態示す自動車の運転席部の部分斜視図である。運転席には、図には見えていないが、その座部、背凭れ部、左足が当たる床部にそれぞれ運転者の背部、臀部、左足の当りを検出する背部センサ、臀部センサ、左足センサが設けられており、これらの背部センサ、臀部センサ、左足センサは、運転者の体調が正常であるときには、それぞれ10n、12n、14nにて示されている領域にて運転者の背部、臀部、左足の当りに反応する。
【0020】
図2は、運転者が体調異常により前のめりの姿勢になった状態を示す自動車の運転席部の図1と同様の部分斜視図である。運転者がこのように前のめりの姿勢になると、背部センサは全く反応しなくなる。臀部センサは、運転者の姿勢が正常である時に対比して、図2に12bとして示されている如く後方へ偏倚した領域にて反応する。左足センサの反応領域は全体としては図2に14bとして示されている如く運転者の姿勢が正常である時と殆ど変わらないが、押圧力は不安定になると考えられる。
【0021】
図3は、運転者が体調異常により仰向けの姿勢になった状態を示す自動車の運転席部の図1または2と同様の部分斜視図である。運転者がこのように仰向けの姿勢になると、背部センサは、図3に10uとして示されている如く、運転者の姿勢が正常である時の反応領域10nよりも広い領域にて反応する。臀部センサは運転者の姿勢が正常である時に対比して図3に12uとして示されている如く前方へ偏倚した領域にて反応する。左足センサの反応領域は、図3に14uとして示されている如く、運転者の姿勢が正常である時と殆ど変わらないが、反応は運転者の姿勢が正常である時に比してより安定的になると考えられる。
【0022】
以上の如き背部センサ、臀部センサ、左足センサの反応領域の位置とその大きさや安定度(或いは不安程度)の変化により運転者の体調異常を前のめりと仰向けの姿勢に分けて検出することができる。
【0023】
図4は、運転者の体調が正常であるとき、背部センサ、臀部センサ、左足センサの検出値が時間の経過につれて変化する態様の例を示す。この例に示すように、運転者の体調が正常であるときには、背部センサの検出値はバラツキが大きく、頻度が多くて、時間は短いものとなり、臀部センサの検出値はバラツキが中程度であり、頻度は多めで、時間は長めのものとなり、左足センサの検出値はバラツキが小さく、頻度は少なく、時間は長いものとなる。
【0024】
図5は、運転者が体調異常により前のめりの姿勢になったとき、即ち過緊張状態にあるとき、背部センサ、臀部センサ、左足センサの検出値が時間の経過につれて変化する態様の例を示す。運転者が体調異常により前のめりの姿勢になったとききには、背部センサの検出値は無くなり、臀部センサの検出値はバラツキが中程度であり、頻度は多めで、時間は長めとなり、左足センサの検出値はバラツキが中程度で、頻度は多めで、時間は短めのものとなる。
【0025】
図6は、運転者が体調異常により仰向けの姿勢になったとき、即ち弛緩状態にあるとき、背部センサ、臀部センサ、左足センサの検出値が時間の経過につれて変化する態様の例を示す。運転者が体調異常により仰向けの姿勢になったとききには、背部センサの検出値はバラツキが小さく、殆どの連続に近いものとなり、臀部センサの検出値はバラツキが中程度であり、頻度は多めで、時間は長めとなり、左足センサの検出値はバラツキが小さく、殆ど連続に近いものとなる。
【0026】
以上の如く背部センサ、臀部センサ、左足センサの検出値が時間の経過につれて変化する態様を捉えることによっても、運転者の体調異常を前のめりと仰向けの姿勢に分けて検出することができる。この場合、図7にフローチャートにて示すように、例えば運転開始から所定の短時間内に得られた図4に例示したような波形を正常時波形とし、これに対してその後の波形を対比させ、それが図5または図6に例示したような異常時の波形となったときには、その間の偏差を周波数解析し、所定の閾値でフィルタ処理し、背面センサ、臀部センサ、左足センサの検出値をそれぞれFb,Fh,Flとして算出し、姿勢に応じて背面センサ、臀部センサ、左足センサの検出値に対し係数B,H,Lを掛け、各センサの感度に対し重み付けを行って判定値RをR=B×Fb+H×Fh+L×Flとして求め、かかる判定値に基づいて運転者の体調の正常/異常の判定を行うようにすれば、判定の精度を上げることができる。そして、かかる判定に基づいて、運転者の体調に異常が生じたと判定されたときには、それに対処する任意のシステム作動が始動されればよい。
【0027】
運転者が図1に示すような正常な姿勢の状態にあるか、図2に示すような前のめりの姿勢の状態にあるか、図3に示すよな仰向けの姿勢の状態にあるかは、運転席の座部に図8の図A、B、Cに示す如く点状センサを分散して配置し、図8の図Aに示す如く全ての点状センサが反応しているか、図8の図Bに示す如く後寄りの位置にある点状センサが反応しているか、図8の図Cに示す如く前寄りの位置にある点状センサが反応しているかを検出することによっても判定される。
【0028】
図9は、座部に点状センサを分散して配置する構造の2例を示す幾分解図的断面図である。例AおよびBのいずれに於いても、クッション16とその表面を覆うシート表皮18の間に複数の点状センサ20が例えば図8A〜Cに示す如く適当な間隔をあけて配置されている。この場合、座部の柔らかさが増すと検出誤差を生じ易くなるが、さりとて座部を硬くすると座り心地が悪くなるので、その間の調整が重要である。例Aにおいては、各点状センサ20の下に硬さ調整部材22が設けられており、これらの硬さ調整部材22は、導線24を経てそれらに供給される電流の大きさによりその硬さが変えられるようになっている。こうして運転中の点状センサ20の感度に応じて硬さ調整部材22へ供給する電流を制御し、座部の柔らかさ(或いは硬さ、総じて、クッション性)が調整されるようになっていれば、座り心地の良さに配慮しつつ、検出誤差の発生を抑制することができる。図Bの例に於いては、複数の点状センサ20にわたって延在する硬さ調整部材26がクッション部材28を伴って設けられている。硬さ調整部材26もまた、それに通電される電流の大きさにより硬さが変わるものであり、供給される電流が制御されることにより、運転中の点状センサ20の感度に応じて座部のクッション性が調整されるようになっている。
【0029】
運転者の姿勢が、図1に示すような正常姿勢から、図3に示すような仰向けの姿勢になることにより、座部に於ける荷重分布が図10の図Aに示すよう分布から図10の図Bに示すような分布に変化したことは、図11のフローチャートにて示す要領にて検出されてもよい。即ち、この場合、シート荷重の形状M(t)を計算し、一定時間内の荷重の平均形状Ma(t)を算出する。そしてM(t)がMa(t)に対し±αの範囲で同一か否かが判別され、答がイエスであれば、姿勢は正常と判定し、答がノーであれば、異常判定のスイッチが有効化され、スイッチを点滅させたり、ピープ音で警報を発することが行われる。また異常判定のスイッチが有効化されることにより、スイッチON?判定がイエスとなることにより自動停止制御が作動される。同様の判定は、運転者の姿勢が、図1に示すような正常姿勢から、図2に示すような前のめりの姿勢になることにより、座部に於ける荷重分布が座部の後方へ偏倚した場合に対しても適用されてよい。
【0030】
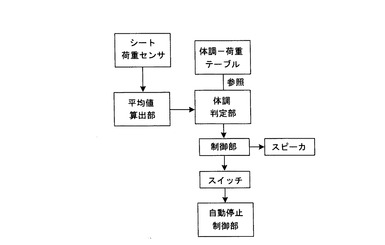
図12は、運転者の体調異常による異常時対応運転制御の要否判定により異常時対応運転制御を作動させる構成を示すブロック図である。図8や図9に例示したような座部に組み込まれた点状センサからなるシート荷重からの荷重検出信号は、車輌の電子制御装置(ECU)のマイクロコンピュータにソフトウェアとして組み込まれた平均値算出手段へ送られ、ここで平均値が時系列的に算出される。算出された平均値は、前記マイクロコンピュータにソフトウェアとして組み込まれた体調判定部に送られる。体調判定部は、マイクロコンピュータ内に予め用意されている運転者の体調と座部荷重分布の関係を示すテーブルを参照して運転者の体調を判定する。そして、その判定結果に応じて、自動停止制御部を作動させるべきときには、制御部がスピーカより警報を発すると同時に、運転者が操作しやすい適当な位置に設けられたスイッチを作動可能にする。ここで運転者がスイッチを押せば、自動停止制御部が作動する。このように自動停止制御部を作動させるスイッチが、運転者の体調の判定に基づき、運転者の体調が不良で自動停止制御部を作動させるのが望まれるときにのみ作動可能とされることにより、運転者の体調が正常であるときに自動停止制御部が誤って作動されることが防止される。
【0031】
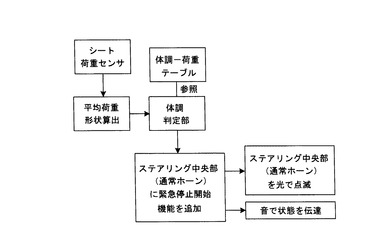
図13も同じく運転者の体調異常による異常時対応運転制御の要否判定により異常時対応運転制御を作動させる構成を示すブロック図である。この場合も同じくシートセンサ荷重からの荷重検出信号は、車輌の電子制御装置(ECU)のマイクロコンピュータにソフトウェアとして組み込まれた平均荷重形状算出手段へ送られ、ここで平均荷重形状が時系列的に算出され、体調判定部に送られ、マイクロコンピュータ内に予め用意されている運転者の体調と座部荷重分布の関係を示すテーブルを参照して運転者の体調が判定される。そして運転者の体調が異常と判定されたときには、特にステアリングホイール中央部(通常ホーン)に組み込まれた緊急停止開始スイッチを作動可能にし、ステアリングホイール中央部に組み込まれた発光体を点滅させ、またピープ音その他の音による警報により運転者に体調異常を警告し、緊急停止開始スイッチを押すことを促す。このように緊急停止開始スイッチがステアリングホイール中央部に組み込まれ、緊急停止を開始すべきときにはホーンに点滅する光が現れるようになっていれば、体調不良を起こした運転者でも容易に緊急停止開始スイッチを押すことができる。また運転者の体調が正常であるときには、運転者が緊急停止開始スイッチを誤って押しても、緊急停止制御が誤って開始されることはない。
【0032】
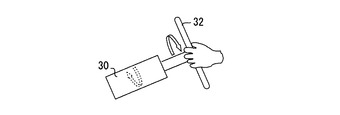
運転者が運転中に急病により意識喪失を起こしたときには、運転者のステア操作やアクセル操作にオーバーライドを許しつつ異常時対応運転制御により運転者をアシストして車輌を路端に停止させるのが好ましいが、運転者が体調異常により過緊張の状態にあると、運転者のステア操作やアクセル操作が急操作となることがあり、かかる運転者のステアやアクセルの急操作にオーバーライドを許すと、車輌の走行が不安定になる虞れがある。従って、運転者が過緊張状態にあるときには、運転者のオーバーライドを不可と判定し、運転者によるアクセルやステアの急操作の入力をカットするようにしてよい。図14および図15は、運転者が過緊張状態にあるか否かを判定する要領を示す操舵装置の一部の概略図とフローチャートである。
【0033】
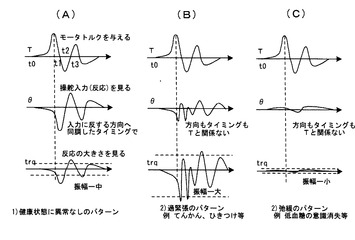
この例では、図14に示すように、操舵装置の一部30内に組み込まれた図には示されていない操舵角修正用のモータを作動させてステアリングホイール32に極小さなテスト用トルクを作用させ、操舵装置より運転者に対しテスト入力を与え、これに対する運転者の反応を見る。例えば、図16のA列上段に示すようなモータトルクを与えると、運転者の体調が正常であれば、運転者はこれを打ち消すようにA列中段に示すような反力トルクをステアリングホイールに与えるので、操舵輪へ向けて出力される操舵トルクの変動はA列下段に示すような小さな変動に収まる。
【0034】
これに対し、もし運転者が体調不良により過緊張状態にあると、B列に示すように同じモータトルクをステアリングホイールに与えることに対して、ドライバは例えばB列中段に示すようなトルクをステアリングホイールに与え、その結果、操舵輪へ向けて出力される操舵トルクはB列下段に示すように大きく変動する。
【0035】
また、もし運転者が体調不良により弛緩状態にあると、同じようなモータトルクをステアリングホイールに与えることに対して、運転者はC列中段に示すように反応せずに、ただステアリングホイールを押さえ込んだ状態にあるので、テスト用トルクが極小さいトルクであれば、操舵輪へ向けて出力される操舵トルクはC列下段に示すように変動しない。
【0036】
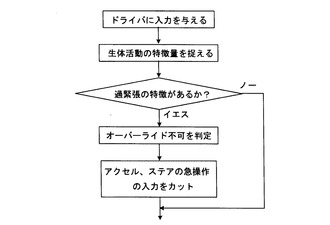
以上のように操舵装置の一部に組み込まれた操舵角修正用のモータを作動させてステアリングホイールに極小さなテスト用トルクを作用させ、それに対する運転者の反応を見る要領にて運転者の生体活動量を捉え、運転者が正常な状態にあるか、過緊張の状態にあるか、弛緩状態にあるかを判定し、運転者が過緊張の状態にあるときには、異常時対応運転制御に対する運転者のオーバーライドを不可とし、運転者によるアクセル、ステアの急操作の入力をカットする。尚、前述したように背部、臀部、左足の押圧力に基づいて運転者が過緊張状態にあるか否かを判定し、その判定結果に応じて同様のオーバーライド不可制御を行ってもよい。
【0037】
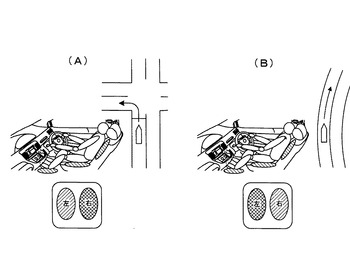
運転者の体調が正常であっても、車輌が図17の図Aに示す如く左折するとき、車速が大きいと、運転者が遠心力により右方へ付勢され、運転者の臀部が座部の左右の部分に及ぼす押圧力は、図17の図Aに示す如く、座部の右領域に於ける値が座部の左領域に於ける値に対比して大きくなる。また運転者の体調が正常であっても、車輌が図17の図Bに示す如く右方へ旋回するとき、車速が大きいと、運転者が遠心力により左方へ付勢され、運転者の臀部が座部の左右の部分に及ぼす押圧力は、図17の図Bに示す如く、座部の左領域に於ける値が座部の右領域に於ける値に対比して大きくなる。かかる車輌の左折或いは右折や旋回走行による座部左右領域間の押圧力の偏倚を運転者の姿勢異常と臀部センサが誤判定することを防止するため、カーナビ情報またはそれに操舵情報を組合せた情報により、車輌が左折或いは右折中であるときや旋回走行中であるときには、座部センサによる運転者の姿勢判定を中断するようにしてよい。
【0038】
以上に説明した種々の判定は、図18に示すような構成の制御装置により実施されてよい。図18に示す装置は、環境情報認識ECU,車輌情報認識ECU,ドライバ状態認識ECU,判定処理ECUを含んでいる。これらのECUは車輌の電子制御装置(ECU)の要部を構成するマイクロコンピュータ内にソフトウェアとして組み込まれていてよいものである。
【0039】
環境情報認識ECUをサポートする装置として、ドライブモニタ、GPS、車載NW、前方・後側方センサ・カメラ、カーナビ、自動認識カメラ等が設けられている。
【0040】
車輌情報認識ECUをサポートする装置として、舵角センサ、Gセンサ、車速センサ等が設けられている。
【0041】
ドライバ状態認識ECUをサポートする装置として、各種スイッチが設けられている。
【0042】
判定処理ECUによる判定結果は運転支援HMIおよび各種運転支援システムへ伝達され、これらを作動させる。
【0043】
運転支援HMIとしては、ディスプレイ、灯火・表示類、スピーカ、キャンセルスイッチが設けられている。各種運転支援システムとしては、ACC、PCS、LKA等が設けられている。各種運転支援システムは、ECB、EPB、LKA等の各種アクチュエータを作動させる。
【符号の説明】
【0044】
10n,10u…運転者の脊部が運転席の背凭れ部に押圧力を及ぼす領域、12n,12b,12u…運転者の臀部が運転席の座部に押圧力を及ぼす領域、14n,14b,14u…運転者の左足が運転席の床部に押圧力を及ぼす領域、16…運転席座部のクッション、18…運転席座部のシート表皮、20…点状センサ、22…硬さ調整部材、24…導線、26…硬さ調整部材、28…クッション部材、30…操舵装置の一部、32…ステアリングホイール
【技術分野】
【0001】
本発明は、自動車等の車輌の運転者の体調に正常な運転を妨げる異変が生じたとき、異常時対応運転制御を行うべきか否かを判定する方法および該判定に基づいて作動する運転制御装置に係る。
【背景技術】
【0002】
自動車等の車輌の運転者の体調に異変が生じたとき、それを運転席上に於ける運転者の姿勢から検出することが、下記の特許文献に記載されている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2002-19555号公報
【特許文献2】特開2008-105607号公報
【特許文献3】特開2003-339681号公報
【0004】
上記の特許文献1には、その図5に示されている如く、運転席の座部を前後左右の四隅にて下方より少なくとも4個の荷重センサにより支持し、これらの荷重センサにより運転席に着座した運転者の体重とともに重心位置を検出することが記載されている。上記の特許文献2には、運転席のシートバック、アームレスト、ヘッドレスト、フットレストに荷重センサを設け、これらの荷重センサにより運転席に着座した運転者の身体挙動に基づいてシートポジションを変更することが記載されている。上記の特許文献3には、運転者の身体状態および心理状態の少なくとも一方の状態が運転に支障をきたす状態となったことを運転者にシンボルマークにて知らせる装置が提案されており、それを作動させるに当って運転者の身体の動きを検出する手段として、図2に示されている如き圧力センサ13を座席に設けることが記載されている。
【発明の概要】
【発明が解決しようとする課題】
【0005】
近年、自動制御技術の発展に伴い、自動車等の車輌の運転中に運転者の体調に不良を来たしたとき、運転者の運転操作を自動制御装置によりアシストすることについて種々の研究や発明がなされている。この場合、自動制御装置によるアシスト操作は、運転者の運転操作に介入してそれに変更を加えることになるので、過度に行われてはならず、そのためには、運転者の体調不良を如何に的確に判定するかが一つの重要な課題になると考えられる。
【0006】
本発明は、上記の事情に着目し、運転者の体調に異常がある場合に実行する異常時対応運転制御の要否を的確に判定する方法、およびそのような判定に基づいて的確な制御を実行する運転制御装置を提供することを課題としている。
【課題を解決するための手段】
【0007】
上記の課題を解決するため、本発明は、運転者の体調に異常があるときに実行する異常時対応運転制御の要否を運転者の体より及ぼされる押圧力に基づいて判定し、その際、運転者の姿勢の特徴に応じて要否判定を異ならせることを特徴とする要否判定方法を提案するものである。
【0008】
前記押圧力は、運転者の脊部より及ぼされる押圧力、臀部より及ぼされる押圧力、左足より及ぼされる押圧力の3者から選択された押圧力であってよい。
【0009】
前記要否判定は、運転者の脊部より及ぼされる押圧力、臀部より及ぼされる押圧力、左足より及ぼされる押圧力の3者から選択された複数の押圧力を組み合わせて行われてよい。この場合、運転者の脊部より及ぼされる押圧力、臀部より及ぼされる押圧力、左足より及ぼされる押圧力の3者から選択された複数の押圧力を組み合わせるに当たって、各押圧力に対して相対的な重み付けが行われてよい。
【0010】
前記要否判定は、前記押圧力の時間経過に伴う変化の周波数解析に基づいて行われてよい。
【0011】
運転者の臀部より及ぼされる押圧力は、該臀部が着座する座部内に分散配置された複数の点状センサにより検出されるようになっていてよい。この場合、複数の点状センサによる押圧力の検出に際し、該点状センサの感度に応じて座部のクッション性が調整されるようになっていてよい。座部のクッション性は、座部内に組み込まれて電気的に硬さが変る硬さ調整部材の電気的制御により行われるようになっていてよい。
【0012】
運転者の体より及ぼされる押圧力に基づく運転者の姿勢の判定は、運転者の臀部によるシート荷重の平均荷重形状により行われてもよい。
【0013】
また上記の課題を解決するため、本発明は、上記の如き方法による要否判定に基づいて異常時対応運転制御を実行する運転制御装置であって、前記要否判定の結果、異常時対応運転制御を開始すべきと判定したとき、運転者による異常時対応運転制御の開始を許可するようになっていることを特徴とする運転制御装置を提案するものである。
【0014】
上記の如き運転制御装置は、運転者による異常時対応運転制御の開始を許可したとき運転者に異常時対応運転制御を開始させるスイッチ手段を有していてよく、また運転者による異常時対応運転制御の開始を許可したとき、運転者に異常時対応運転制御の開始を促すようになっていてよい。
【0015】
また上記の如き運転制御装置は、運転者が過緊張状態にあるか否かを判定し、運転者が過緊張状態にあるときには、運転者による運転操作が異常時対応運転制御にオーバーライドすることを許可しないようになっていてよい。運転者が過緊張状態にあるか否かの判定は、ステアリングホイールに極小さなテスト用トルクを作用させ、それに対する運転者の反応を見ることにより行われてよい。
【発明の効果】
【0016】
運転者の体調に異常があるときに実行する異常時対応運転制御の要否を運転者の体より及ぼされる押圧力に基づいて判定し、その際、運転者の姿勢の特徴に応じて要否判定を異ならせるようにすれば、以下の実施例についての説明より明らかとなる通り、運転者の体調異常に対する異常時対応運転制御の要否を的確に判定することができる。
【0017】
また上記の如き運転者の体調異常に対する異常時対応運転制御の要否の判定に基づいて異常時対応運転制御を実行する運転制御装置が、前記要否判定の結果、異常時対応運転制御を開始すべきと判定した場合には、運転者による異常時対応運転制御の開始を許可するようになっていれば、運転者が体調異常時に異常時対応運転制御を開始させるために操作する押しボタン等の異常時対応運転制御始動手段を、運転者が体調に異常を来たしたときにも容易に操作できるよう、ステアリングホール周りの運転者の手が届き易い位置に設けておいても、運転者の体調が正常な通常の運転時に、それが誤って操作されることにより、異常時対応運転制御が誤って始動されることを確実に防止することができる。
【図面の簡単な説明】
【0018】
【図1】運転者の体調が正常であるときの運転状態示す自動車の運転席部の部分斜視図。
【図2】運転者が体調異常により前のめりの姿勢になった状態を示す自動車の運転席部の部分斜視図。
【図3】運転者が体調異常により仰向けの姿勢になった状態を示す自動車の運転席部の部分斜視図。
【図4】運転者の体調が正常であるとき、背部センサ、臀部センサ、左足センサの検出値が時間の経過につれて変化する態様の例を示すグラフ。
【図5】運転者が体調異常により前のめりの姿勢になったとき、背部センサ、臀部センサ、左足センサの検出値が時間の経過につれて変化する態様の例を示すグラフ。
【図6】運転者が体調異常により仰向けの姿勢になったとき、背部センサ、臀部センサ、左足センサの検出値が時間の経過につれて変化する態様の例を示すグラフ。
【図7】背部センサ、臀部センサ、左足センサの検出値が時間の経過につれて変化する態様の変化を捉えることにより運転者の体調異常を検出する過程を示すフローチャート。
【図8】運転席の座部に分散して配置された点状センサの反応を運転者が正常な姿勢の状態にあるとき(A)、前のめりの姿勢にあるとき(B)、仰向けの姿勢にあるとき(C)について示す概略図。
【図9】座部に点状センサを分散して配置する構造の2例を示す幾分解図的断面図。
【図10】座部に於ける荷重分布を運転者が正常な姿勢にあるとき(A)と仰向けの姿勢にあるとき(B)について示す概略図。
【図11】図10のA、Bに示すような座部に於ける荷重分布を解析する演算処理を示すフローチャート。
【図12】運転者の体調異常による異常時対応運転制御の要否判定により異常時対応運転制御を作動させる一つの構成を示すブロック図。
【図13】運転者の体調異常による異常時対応運転制御の要否判定により異常時対応運転制御を作動させる他の一つの構成のを示すブロック図。
【図14】操舵装置の一部内に組み込まれた図には示されていない操舵角修正用のモータを作動させてステアリングホイールに極小さなテスト用トルクを作用させる要領を示す概略図。
【図15】運転者が過緊張状態にあるか否かを判定してオーバーライドを選択する要領を示すフローチャート。
【図16】操舵装置よりテスト用トルクをステアリングホイール作用させ、それに対し運転者が反応し、それによって操舵輪へ向けて出力される操舵トルクに生ずる変動を運転者の体調が正常であるとき(A)、運転者が過緊張状態にあるとき(B)、運転者が弛緩状態にあるとき(C)について例示するグラフ。
【図17】車輌左折時に運転者に作用する遠心力により臀部が座部の左右の部分に及ぼす押圧力に生ずる偏倚を示す説明図(A)および車輌右旋回時に臀部が座部の左右の部分に及ぼす押圧力に生ずる偏倚を示す説明図(B)。
【図18】種々の判定を行う制御装置の構成を示すブロック図。
【発明を実施するための形態】
【0019】
図1は、運転者の体調が正常であるときの運転状態示す自動車の運転席部の部分斜視図である。運転席には、図には見えていないが、その座部、背凭れ部、左足が当たる床部にそれぞれ運転者の背部、臀部、左足の当りを検出する背部センサ、臀部センサ、左足センサが設けられており、これらの背部センサ、臀部センサ、左足センサは、運転者の体調が正常であるときには、それぞれ10n、12n、14nにて示されている領域にて運転者の背部、臀部、左足の当りに反応する。
【0020】
図2は、運転者が体調異常により前のめりの姿勢になった状態を示す自動車の運転席部の図1と同様の部分斜視図である。運転者がこのように前のめりの姿勢になると、背部センサは全く反応しなくなる。臀部センサは、運転者の姿勢が正常である時に対比して、図2に12bとして示されている如く後方へ偏倚した領域にて反応する。左足センサの反応領域は全体としては図2に14bとして示されている如く運転者の姿勢が正常である時と殆ど変わらないが、押圧力は不安定になると考えられる。
【0021】
図3は、運転者が体調異常により仰向けの姿勢になった状態を示す自動車の運転席部の図1または2と同様の部分斜視図である。運転者がこのように仰向けの姿勢になると、背部センサは、図3に10uとして示されている如く、運転者の姿勢が正常である時の反応領域10nよりも広い領域にて反応する。臀部センサは運転者の姿勢が正常である時に対比して図3に12uとして示されている如く前方へ偏倚した領域にて反応する。左足センサの反応領域は、図3に14uとして示されている如く、運転者の姿勢が正常である時と殆ど変わらないが、反応は運転者の姿勢が正常である時に比してより安定的になると考えられる。
【0022】
以上の如き背部センサ、臀部センサ、左足センサの反応領域の位置とその大きさや安定度(或いは不安程度)の変化により運転者の体調異常を前のめりと仰向けの姿勢に分けて検出することができる。
【0023】
図4は、運転者の体調が正常であるとき、背部センサ、臀部センサ、左足センサの検出値が時間の経過につれて変化する態様の例を示す。この例に示すように、運転者の体調が正常であるときには、背部センサの検出値はバラツキが大きく、頻度が多くて、時間は短いものとなり、臀部センサの検出値はバラツキが中程度であり、頻度は多めで、時間は長めのものとなり、左足センサの検出値はバラツキが小さく、頻度は少なく、時間は長いものとなる。
【0024】
図5は、運転者が体調異常により前のめりの姿勢になったとき、即ち過緊張状態にあるとき、背部センサ、臀部センサ、左足センサの検出値が時間の経過につれて変化する態様の例を示す。運転者が体調異常により前のめりの姿勢になったとききには、背部センサの検出値は無くなり、臀部センサの検出値はバラツキが中程度であり、頻度は多めで、時間は長めとなり、左足センサの検出値はバラツキが中程度で、頻度は多めで、時間は短めのものとなる。
【0025】
図6は、運転者が体調異常により仰向けの姿勢になったとき、即ち弛緩状態にあるとき、背部センサ、臀部センサ、左足センサの検出値が時間の経過につれて変化する態様の例を示す。運転者が体調異常により仰向けの姿勢になったとききには、背部センサの検出値はバラツキが小さく、殆どの連続に近いものとなり、臀部センサの検出値はバラツキが中程度であり、頻度は多めで、時間は長めとなり、左足センサの検出値はバラツキが小さく、殆ど連続に近いものとなる。
【0026】
以上の如く背部センサ、臀部センサ、左足センサの検出値が時間の経過につれて変化する態様を捉えることによっても、運転者の体調異常を前のめりと仰向けの姿勢に分けて検出することができる。この場合、図7にフローチャートにて示すように、例えば運転開始から所定の短時間内に得られた図4に例示したような波形を正常時波形とし、これに対してその後の波形を対比させ、それが図5または図6に例示したような異常時の波形となったときには、その間の偏差を周波数解析し、所定の閾値でフィルタ処理し、背面センサ、臀部センサ、左足センサの検出値をそれぞれFb,Fh,Flとして算出し、姿勢に応じて背面センサ、臀部センサ、左足センサの検出値に対し係数B,H,Lを掛け、各センサの感度に対し重み付けを行って判定値RをR=B×Fb+H×Fh+L×Flとして求め、かかる判定値に基づいて運転者の体調の正常/異常の判定を行うようにすれば、判定の精度を上げることができる。そして、かかる判定に基づいて、運転者の体調に異常が生じたと判定されたときには、それに対処する任意のシステム作動が始動されればよい。
【0027】
運転者が図1に示すような正常な姿勢の状態にあるか、図2に示すような前のめりの姿勢の状態にあるか、図3に示すよな仰向けの姿勢の状態にあるかは、運転席の座部に図8の図A、B、Cに示す如く点状センサを分散して配置し、図8の図Aに示す如く全ての点状センサが反応しているか、図8の図Bに示す如く後寄りの位置にある点状センサが反応しているか、図8の図Cに示す如く前寄りの位置にある点状センサが反応しているかを検出することによっても判定される。
【0028】
図9は、座部に点状センサを分散して配置する構造の2例を示す幾分解図的断面図である。例AおよびBのいずれに於いても、クッション16とその表面を覆うシート表皮18の間に複数の点状センサ20が例えば図8A〜Cに示す如く適当な間隔をあけて配置されている。この場合、座部の柔らかさが増すと検出誤差を生じ易くなるが、さりとて座部を硬くすると座り心地が悪くなるので、その間の調整が重要である。例Aにおいては、各点状センサ20の下に硬さ調整部材22が設けられており、これらの硬さ調整部材22は、導線24を経てそれらに供給される電流の大きさによりその硬さが変えられるようになっている。こうして運転中の点状センサ20の感度に応じて硬さ調整部材22へ供給する電流を制御し、座部の柔らかさ(或いは硬さ、総じて、クッション性)が調整されるようになっていれば、座り心地の良さに配慮しつつ、検出誤差の発生を抑制することができる。図Bの例に於いては、複数の点状センサ20にわたって延在する硬さ調整部材26がクッション部材28を伴って設けられている。硬さ調整部材26もまた、それに通電される電流の大きさにより硬さが変わるものであり、供給される電流が制御されることにより、運転中の点状センサ20の感度に応じて座部のクッション性が調整されるようになっている。
【0029】
運転者の姿勢が、図1に示すような正常姿勢から、図3に示すような仰向けの姿勢になることにより、座部に於ける荷重分布が図10の図Aに示すよう分布から図10の図Bに示すような分布に変化したことは、図11のフローチャートにて示す要領にて検出されてもよい。即ち、この場合、シート荷重の形状M(t)を計算し、一定時間内の荷重の平均形状Ma(t)を算出する。そしてM(t)がMa(t)に対し±αの範囲で同一か否かが判別され、答がイエスであれば、姿勢は正常と判定し、答がノーであれば、異常判定のスイッチが有効化され、スイッチを点滅させたり、ピープ音で警報を発することが行われる。また異常判定のスイッチが有効化されることにより、スイッチON?判定がイエスとなることにより自動停止制御が作動される。同様の判定は、運転者の姿勢が、図1に示すような正常姿勢から、図2に示すような前のめりの姿勢になることにより、座部に於ける荷重分布が座部の後方へ偏倚した場合に対しても適用されてよい。
【0030】
図12は、運転者の体調異常による異常時対応運転制御の要否判定により異常時対応運転制御を作動させる構成を示すブロック図である。図8や図9に例示したような座部に組み込まれた点状センサからなるシート荷重からの荷重検出信号は、車輌の電子制御装置(ECU)のマイクロコンピュータにソフトウェアとして組み込まれた平均値算出手段へ送られ、ここで平均値が時系列的に算出される。算出された平均値は、前記マイクロコンピュータにソフトウェアとして組み込まれた体調判定部に送られる。体調判定部は、マイクロコンピュータ内に予め用意されている運転者の体調と座部荷重分布の関係を示すテーブルを参照して運転者の体調を判定する。そして、その判定結果に応じて、自動停止制御部を作動させるべきときには、制御部がスピーカより警報を発すると同時に、運転者が操作しやすい適当な位置に設けられたスイッチを作動可能にする。ここで運転者がスイッチを押せば、自動停止制御部が作動する。このように自動停止制御部を作動させるスイッチが、運転者の体調の判定に基づき、運転者の体調が不良で自動停止制御部を作動させるのが望まれるときにのみ作動可能とされることにより、運転者の体調が正常であるときに自動停止制御部が誤って作動されることが防止される。
【0031】
図13も同じく運転者の体調異常による異常時対応運転制御の要否判定により異常時対応運転制御を作動させる構成を示すブロック図である。この場合も同じくシートセンサ荷重からの荷重検出信号は、車輌の電子制御装置(ECU)のマイクロコンピュータにソフトウェアとして組み込まれた平均荷重形状算出手段へ送られ、ここで平均荷重形状が時系列的に算出され、体調判定部に送られ、マイクロコンピュータ内に予め用意されている運転者の体調と座部荷重分布の関係を示すテーブルを参照して運転者の体調が判定される。そして運転者の体調が異常と判定されたときには、特にステアリングホイール中央部(通常ホーン)に組み込まれた緊急停止開始スイッチを作動可能にし、ステアリングホイール中央部に組み込まれた発光体を点滅させ、またピープ音その他の音による警報により運転者に体調異常を警告し、緊急停止開始スイッチを押すことを促す。このように緊急停止開始スイッチがステアリングホイール中央部に組み込まれ、緊急停止を開始すべきときにはホーンに点滅する光が現れるようになっていれば、体調不良を起こした運転者でも容易に緊急停止開始スイッチを押すことができる。また運転者の体調が正常であるときには、運転者が緊急停止開始スイッチを誤って押しても、緊急停止制御が誤って開始されることはない。
【0032】
運転者が運転中に急病により意識喪失を起こしたときには、運転者のステア操作やアクセル操作にオーバーライドを許しつつ異常時対応運転制御により運転者をアシストして車輌を路端に停止させるのが好ましいが、運転者が体調異常により過緊張の状態にあると、運転者のステア操作やアクセル操作が急操作となることがあり、かかる運転者のステアやアクセルの急操作にオーバーライドを許すと、車輌の走行が不安定になる虞れがある。従って、運転者が過緊張状態にあるときには、運転者のオーバーライドを不可と判定し、運転者によるアクセルやステアの急操作の入力をカットするようにしてよい。図14および図15は、運転者が過緊張状態にあるか否かを判定する要領を示す操舵装置の一部の概略図とフローチャートである。
【0033】
この例では、図14に示すように、操舵装置の一部30内に組み込まれた図には示されていない操舵角修正用のモータを作動させてステアリングホイール32に極小さなテスト用トルクを作用させ、操舵装置より運転者に対しテスト入力を与え、これに対する運転者の反応を見る。例えば、図16のA列上段に示すようなモータトルクを与えると、運転者の体調が正常であれば、運転者はこれを打ち消すようにA列中段に示すような反力トルクをステアリングホイールに与えるので、操舵輪へ向けて出力される操舵トルクの変動はA列下段に示すような小さな変動に収まる。
【0034】
これに対し、もし運転者が体調不良により過緊張状態にあると、B列に示すように同じモータトルクをステアリングホイールに与えることに対して、ドライバは例えばB列中段に示すようなトルクをステアリングホイールに与え、その結果、操舵輪へ向けて出力される操舵トルクはB列下段に示すように大きく変動する。
【0035】
また、もし運転者が体調不良により弛緩状態にあると、同じようなモータトルクをステアリングホイールに与えることに対して、運転者はC列中段に示すように反応せずに、ただステアリングホイールを押さえ込んだ状態にあるので、テスト用トルクが極小さいトルクであれば、操舵輪へ向けて出力される操舵トルクはC列下段に示すように変動しない。
【0036】
以上のように操舵装置の一部に組み込まれた操舵角修正用のモータを作動させてステアリングホイールに極小さなテスト用トルクを作用させ、それに対する運転者の反応を見る要領にて運転者の生体活動量を捉え、運転者が正常な状態にあるか、過緊張の状態にあるか、弛緩状態にあるかを判定し、運転者が過緊張の状態にあるときには、異常時対応運転制御に対する運転者のオーバーライドを不可とし、運転者によるアクセル、ステアの急操作の入力をカットする。尚、前述したように背部、臀部、左足の押圧力に基づいて運転者が過緊張状態にあるか否かを判定し、その判定結果に応じて同様のオーバーライド不可制御を行ってもよい。
【0037】
運転者の体調が正常であっても、車輌が図17の図Aに示す如く左折するとき、車速が大きいと、運転者が遠心力により右方へ付勢され、運転者の臀部が座部の左右の部分に及ぼす押圧力は、図17の図Aに示す如く、座部の右領域に於ける値が座部の左領域に於ける値に対比して大きくなる。また運転者の体調が正常であっても、車輌が図17の図Bに示す如く右方へ旋回するとき、車速が大きいと、運転者が遠心力により左方へ付勢され、運転者の臀部が座部の左右の部分に及ぼす押圧力は、図17の図Bに示す如く、座部の左領域に於ける値が座部の右領域に於ける値に対比して大きくなる。かかる車輌の左折或いは右折や旋回走行による座部左右領域間の押圧力の偏倚を運転者の姿勢異常と臀部センサが誤判定することを防止するため、カーナビ情報またはそれに操舵情報を組合せた情報により、車輌が左折或いは右折中であるときや旋回走行中であるときには、座部センサによる運転者の姿勢判定を中断するようにしてよい。
【0038】
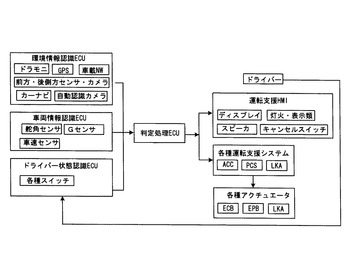
以上に説明した種々の判定は、図18に示すような構成の制御装置により実施されてよい。図18に示す装置は、環境情報認識ECU,車輌情報認識ECU,ドライバ状態認識ECU,判定処理ECUを含んでいる。これらのECUは車輌の電子制御装置(ECU)の要部を構成するマイクロコンピュータ内にソフトウェアとして組み込まれていてよいものである。
【0039】
環境情報認識ECUをサポートする装置として、ドライブモニタ、GPS、車載NW、前方・後側方センサ・カメラ、カーナビ、自動認識カメラ等が設けられている。
【0040】
車輌情報認識ECUをサポートする装置として、舵角センサ、Gセンサ、車速センサ等が設けられている。
【0041】
ドライバ状態認識ECUをサポートする装置として、各種スイッチが設けられている。
【0042】
判定処理ECUによる判定結果は運転支援HMIおよび各種運転支援システムへ伝達され、これらを作動させる。
【0043】
運転支援HMIとしては、ディスプレイ、灯火・表示類、スピーカ、キャンセルスイッチが設けられている。各種運転支援システムとしては、ACC、PCS、LKA等が設けられている。各種運転支援システムは、ECB、EPB、LKA等の各種アクチュエータを作動させる。
【符号の説明】
【0044】
10n,10u…運転者の脊部が運転席の背凭れ部に押圧力を及ぼす領域、12n,12b,12u…運転者の臀部が運転席の座部に押圧力を及ぼす領域、14n,14b,14u…運転者の左足が運転席の床部に押圧力を及ぼす領域、16…運転席座部のクッション、18…運転席座部のシート表皮、20…点状センサ、22…硬さ調整部材、24…導線、26…硬さ調整部材、28…クッション部材、30…操舵装置の一部、32…ステアリングホイール
【特許請求の範囲】
【請求項1】
運転者の体調に異常があるときに実行する異常時対応運転制御の要否を運転者の体より及ぼされる押圧力に基づいて判定し、その際、運転者の姿勢の特徴に応じて要否判定を異ならせることを特徴とする要否判定方法。
【請求項2】
前記押圧力は、運転者の脊部より及ぼされる押圧力、臀部より及ぼされる押圧力、左足より及ぼされる押圧力の3者から選択された押圧力であることを特徴とする請求項1に記載の要否判定方法。
【請求項3】
前記要否判定は、運転者の脊部より及ぼされる押圧力、臀部より及ぼされる押圧力、左足より及ぼされる押圧力の3者から選択された複数の押圧力を組み合わせて行われることを特徴とする請求項2に記載の要否判定方法。
【請求項4】
運転者の脊部より及ぼされる押圧力、臀部より及ぼされる押圧力、左足より及ぼされる押圧力の3者から選択された複数の押圧力を組み合わせるに当たって、各押圧力に対して相対的な重み付けが行われることを特徴とする請求項3に記載の要否判定方法。
【請求項5】
前記要否判定は、前記押圧力の時間経過に伴う変化の周波数解析に基づいて行われることを特徴とする請求項1〜4のいずれかに記載の要否判定方法。
【請求項6】
運転者の臀部より及ぼされる押圧力を、該臀部が着座する座部内に分散配置された複数の点状センサにより検出するようになっていることを特徴とする請求項2〜5のいずれかに記載の要否判定方法。
【請求項7】
前記複数の点状センサによる押圧力の検出に際し、該点状センサの感度に応じて座部のクッション性が調整されるようになっていることを特徴とする請求項6に記載の要否判定方法。
【請求項8】
前記座部のクッション性は、座部内に組み込まれて電気的に硬さが変る硬さ調整部材の電気的制御により行われるようになっていることを特徴とする請求項7に記載の要否判定方法。
【請求項9】
運転者の体より及ぼされる押圧力に基づく運転者の姿勢の判定は、運転者の臀部によるシート荷重の平均荷重形状により行われることを特徴とする請求項1に記載の要否判定方法。
【請求項10】
請求項1〜9のいずれかに記載の要否判定方法に基づいて異常時対応運転制御を実行する運転制御装置であって、前記要否判定の結果、異常時対応運転制御を開始すべきと判定したとき、運転者による異常時対応運転制御の開始を許可するようになっていることを特徴とする運転制御装置。
【請求項11】
運転者による異常時対応運転制御の開始を許可したとき、運転者に異常時対応運転制御を開始させるスイッチ手段を有することを特徴とする請求項10に記載の運転制御装置。
【請求項12】
運転者による異常時対応運転制御の開始を許可したとき、運転者に異常時対応運転制御の開始を促すようになっていることを特徴とする請求項10または11に記載の運転制御装置。
【請求項13】
運転者が過緊張状態にあるか否かを判定し、運転者が過緊張状態にあるときには運転者の運転操作が異常時対応運転制御にオーバーライドすることを許可しないようになっていることを特徴とする請求項10〜12のいずれかに記載の運転制御装置。
【請求項14】
運転者が過緊張状態にあるか否かの判定は、ステアリングホイールに極小さなテスト用トルクを作用させ、それに対する運転者の反応を見ることにより行われることを特徴とする請求項13に記載の運転制御装置。
【請求項1】
運転者の体調に異常があるときに実行する異常時対応運転制御の要否を運転者の体より及ぼされる押圧力に基づいて判定し、その際、運転者の姿勢の特徴に応じて要否判定を異ならせることを特徴とする要否判定方法。
【請求項2】
前記押圧力は、運転者の脊部より及ぼされる押圧力、臀部より及ぼされる押圧力、左足より及ぼされる押圧力の3者から選択された押圧力であることを特徴とする請求項1に記載の要否判定方法。
【請求項3】
前記要否判定は、運転者の脊部より及ぼされる押圧力、臀部より及ぼされる押圧力、左足より及ぼされる押圧力の3者から選択された複数の押圧力を組み合わせて行われることを特徴とする請求項2に記載の要否判定方法。
【請求項4】
運転者の脊部より及ぼされる押圧力、臀部より及ぼされる押圧力、左足より及ぼされる押圧力の3者から選択された複数の押圧力を組み合わせるに当たって、各押圧力に対して相対的な重み付けが行われることを特徴とする請求項3に記載の要否判定方法。
【請求項5】
前記要否判定は、前記押圧力の時間経過に伴う変化の周波数解析に基づいて行われることを特徴とする請求項1〜4のいずれかに記載の要否判定方法。
【請求項6】
運転者の臀部より及ぼされる押圧力を、該臀部が着座する座部内に分散配置された複数の点状センサにより検出するようになっていることを特徴とする請求項2〜5のいずれかに記載の要否判定方法。
【請求項7】
前記複数の点状センサによる押圧力の検出に際し、該点状センサの感度に応じて座部のクッション性が調整されるようになっていることを特徴とする請求項6に記載の要否判定方法。
【請求項8】
前記座部のクッション性は、座部内に組み込まれて電気的に硬さが変る硬さ調整部材の電気的制御により行われるようになっていることを特徴とする請求項7に記載の要否判定方法。
【請求項9】
運転者の体より及ぼされる押圧力に基づく運転者の姿勢の判定は、運転者の臀部によるシート荷重の平均荷重形状により行われることを特徴とする請求項1に記載の要否判定方法。
【請求項10】
請求項1〜9のいずれかに記載の要否判定方法に基づいて異常時対応運転制御を実行する運転制御装置であって、前記要否判定の結果、異常時対応運転制御を開始すべきと判定したとき、運転者による異常時対応運転制御の開始を許可するようになっていることを特徴とする運転制御装置。
【請求項11】
運転者による異常時対応運転制御の開始を許可したとき、運転者に異常時対応運転制御を開始させるスイッチ手段を有することを特徴とする請求項10に記載の運転制御装置。
【請求項12】
運転者による異常時対応運転制御の開始を許可したとき、運転者に異常時対応運転制御の開始を促すようになっていることを特徴とする請求項10または11に記載の運転制御装置。
【請求項13】
運転者が過緊張状態にあるか否かを判定し、運転者が過緊張状態にあるときには運転者の運転操作が異常時対応運転制御にオーバーライドすることを許可しないようになっていることを特徴とする請求項10〜12のいずれかに記載の運転制御装置。
【請求項14】
運転者が過緊張状態にあるか否かの判定は、ステアリングホイールに極小さなテスト用トルクを作用させ、それに対する運転者の反応を見ることにより行われることを特徴とする請求項13に記載の運転制御装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【公開番号】特開2012−254745(P2012−254745A)
【公開日】平成24年12月27日(2012.12.27)
【国際特許分類】
【出願番号】特願2011−129642(P2011−129642)
【出願日】平成23年6月9日(2011.6.9)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
【公開日】平成24年12月27日(2012.12.27)
【国際特許分類】
【出願日】平成23年6月9日(2011.6.9)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
[ Back to top ]