
異常検出装置、および異常検出プログラム
【課題】障害物検出装置の異常を検出する異常検出装置において、簡素な処理で異常検出装置の異常を検出できるようにする。
【解決手段】レーダセンサにおいて信号処理部は、自車両の相対移動ベクトルと今回の処理開始までに求められた中心軸の方向とがなす角である偏向量を検出し、この偏向量が0に近づくように中心軸の方向を補正する。そして、この補正後の中心軸の方向を利用して、再度、偏向量を検出し、この偏向量がさらに0に近づくように中心軸の方向を補正する。このような処理を繰り返すことで、偏向量を段階的に0に収束させる。この構成において、偏向量の変化パターンが予め設定された基準パターンから逸脱する場合にレーダセンサに異常があると判定する(S210〜S230)。
【解決手段】レーダセンサにおいて信号処理部は、自車両の相対移動ベクトルと今回の処理開始までに求められた中心軸の方向とがなす角である偏向量を検出し、この偏向量が0に近づくように中心軸の方向を補正する。そして、この補正後の中心軸の方向を利用して、再度、偏向量を検出し、この偏向量がさらに0に近づくように中心軸の方向を補正する。このような処理を繰り返すことで、偏向量を段階的に0に収束させる。この構成において、偏向量の変化パターンが予め設定された基準パターンから逸脱する場合にレーダセンサに異常があると判定する(S210〜S230)。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、車両に搭載され、所定の送信波を照射し、その反射波に基づいて障害物を検出する障害物検出装置の異常を検出する異常検出装置、および異常検出プログラムに関する。
【背景技術】
【0002】
上記異常検出装置として、反射波を受信する受信面の汚れを検出するものが知られている(例えば、特許文献1参照)。この異常検出装置では、複数のチャンネルを有する受信部のそれぞれが反射波を受け、入力された反射波に基づく受信電力が最大となるチャンネルにおける電力と他のチャンネルにおける電力との偏差が閾値を超えた場合に受信面が汚れていると判定する。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2009−192442号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、上記異常検出装置では、受信面の汚れ等の異常を検出するために、全てのチャンネルによる受信電力を順次比較する必要があり、この際の処理が煩雑になるという問題点があった。
【0005】
そこで、このような問題点を鑑み、所定の送信波を照射し、その反射波に基づいて障害物を検出する障害物検出装置の異常を検出する異常検出装置および異常検出プログラムにおいて、簡素な処理で異常検出装置の異常を検出できるようにすることを第1の目的とし、異常を検出する際の検出速度を向上できるようにすることを第2の目的とする。
【課題を解決するための手段】
【0006】
かかる目的を達成するために成された第1の構成の異常検出装置において、受信信号取得手段は反射波に基づく受信信号を取得し、障害物検出手段は、この受信信号から予め中心軸記録部に記録された中心軸の方向に対する障害物が位置する角度および障害物までの距離を繰り返し検出する。そして、偏向量検出手段は、障害物に対する自車両の相対移動ベクトルと中心軸の方向とがなす角である偏向量を繰り返し検出し、補正量演算手段は、偏向量が0に近づくようにこの偏向量を複数回に分けて補正する際の補正量を繰り返し演算する。
【0007】
さらに記録制御手段は、中心軸の方向を補正量の分だけ補正して得られる新たな中心軸の方向を障害物検出手段が障害物を検出する際に利用する中心軸の方向として中心軸記録部に記録させ、偏向量記録手段は、偏向量または偏向量に連動するパラメータを履歴として履歴記録部に記録させる。そして、第1異常判定手段は、偏向量または偏向量に連動するパラメータの変化パターンが予め設定された基準パターンから逸脱する場合に障害物検出装置に異常があると判定する。
【0008】
すなわち、本発明では、自車両の相対移動ベクトルと今回の処理開始までに求められた中心軸の方向とがなす角である偏向量を検出し、この偏向量が0に近づくように中心軸の方向を補正する。そして、この補正後の中心軸の方向を利用して、再度、偏向量を検出し、この偏向量がさらに0に近づくように中心軸の方向を補正する。このような処理を繰り返すことで、偏向量を段階的に0に収束させる。
【0009】
このような構成では、異常検出装置に異常がない場合には、偏向量が所定の繰り返し回数で0に近づくような偏向量の変化パターンが得られるものと予想される。一方で、異常検出装置に汚れ等の異常がある場合には、異常がない場合とは異なる偏向量の変化パターンが得られるものと考えられる。そこで、本発明では、異常がない場合に得られると予想される変化パターンを基準パターンとして保持しておき、偏向量または偏向量に連動するパラメータの変化パターンがこの基準パターンから逸脱する場合に異常検出装置に異常があると判定するようにしている。
【0010】
このような異常検出装置によれば、偏向量が段階的に0に近づくように中心軸の方向を補正する構成において、偏向量(または偏向量に連動するパラメータ)を記録し、この変化パターンを基準パターンと比較するだけで、異常検出装置の異常を検出することができる。よって、簡素な処理で異常検出装置の異常を検出できる。
【0011】
ところで、上記異常検出装置においては、第2の構成の異常検出装置のように、第1異常判定手段は、偏向量または偏向量に連動するパラメータが、時間の経過とともに増加したときに、異常であると判定するようにしてもよい。
【0012】
このような異常検出装置によれば、時間の経過とともに0に近づくはずの偏向量が増加したときに、異常があると判断することができる。
また、上記異常検出装置においては、第3の構成の異常検出装置のように、第1異常判定手段は、補正後偏向量または補正後偏向量に連動するパラメータが予め設定された基準変化率を超えて変化したときに、異常であると判定するようにしてもよい。
【0013】
このような異常検出装置によれば、時間の経過とともに偏向量が0に近づいていたとしても、このときの変化率が基準変化率を超えて異常に大きな場合に、異常であると判断することができる。
【0014】
さらに、上記異常検出装置においては、第4の構成の異常検出装置のように、偏向量または偏向量に連動するパラメータの履歴は、この異常検出装置の電源がOFF状態にされると削除されるよう構成されており、第1異常判定手段によって異常であると判定された際に、異常がある旨を記録する異常記録手段と、異常がある旨が記録された場合に、履歴および異常がある旨が削除されないよう保護する保護手段と、を備えていてもよい。
【0015】
このような異常検出装置によれば、異常が発生した場合に履歴が削除されないようにするので、異常が発生したときの原因を履歴によって解明しやすくすることができる。
また、上記異常検出装置においては、第5の構成の異常検出装置のように、受信信号取得手段は、反射波を互いに異なるアンテナ素子で受信する複数の受信チャンネルを有する障害物検出装置から複数の受信チャンネル毎の受信信号を取得し、複数の受信チャンネルから受信信号が得られる毎に、受信チャンネルの中で受信信号の電力値が最大となるものを最大チャンネルとして抽出し、受信チャンネル毎に最大チャンネルとの電力値の偏差を算出する偏差算出手段と、受信チャンネルのうち、偏差算出手段にて算出される偏差が予め設定された候補閾値以上となるものがあれば、異常判定値をインクリメントする判定値カウント手段と、異常判定値が予め設定された異常判定閾値以上になった場合に、障害物検出装置に異常があると判定する第2異常判定手段と、を備えていてもよい。
【0016】
このような異常検出装置によれば、受信電力の偏差が大きな状態が継続的に発生した場合にも、異常であると判定することができる。
さらに、上記異常検出装置においては、第6の構成の異常検出装置のように、第1異常判定手段によって異常があると判定された場合、異常判定閾値をより小さな値に変更する閾値変更手段、を備えていてもよい。
【0017】
このような異常検出装置によれば、第1異常判定手段によって異常が検出された場合に、第2異常判定手段によって異常であると判定されるまでの時間を短縮することができる。
【0018】
また、上記異常検出装置においては、第7の構成の異常検出装置のように、第2異常判定手段によって異常があると判定された場合、異常がある旨を出力する異常出力手段、を備えていてもよい。
【0019】
このような異常検出装置によれば、第2異常判定手段による異常がある旨を出力することができる。そして、第4の構成のように、第1異常判定手段による判定結果を保持していれば、異常の原因を特定しやすくすることができる。
【0020】
上記異常検出装置においては、第8の構成の異常検出装置のように、偏向量検出手段は、最新の偏向量に過去において検出された偏向量を加味した偏向量を繰り返し検出するようにしてもよい。
【0021】
このような異常検出装置によれば、過去において検出された偏向量を加味して偏向量を検出するので、ノイズや振動等の影響で一時的に偏向量が大きく変化した場合に、異常であると誤検出してしまうことを防止することができる。
【0022】
また、上記目的を達成するためのプログラムは、コンピュータを、上記何れか1項に記載の異常検出装置を構成する各手段として機能させるための異常検出プログラムであることを特徴とする。
【0023】
このような異常検出プログラムによれば、少なくとも請求項1に記載の異常検出装置と同様の効果を享受することができる。
【図面の簡単な説明】
【0024】
【図1】発明が適用された車両制御システムの構成を示すブロック図である。
【図2】レーダセンサの外観図である。
【図3】レーダ波の送信タイミングを示す説明図である。
【図4】軸ずれ補正処理を示すフローチャートである。
【図5】軸ずれ量θについての説明図である。
【図6】異常検出処理を示すフローチャートである。
【図7】θshiftの履歴を示すグラフである。
【発明を実施するための形態】
【0025】
以下に本発明にかかる実施の形態を図面とともに説明する。
[本実施形態の全体構成]
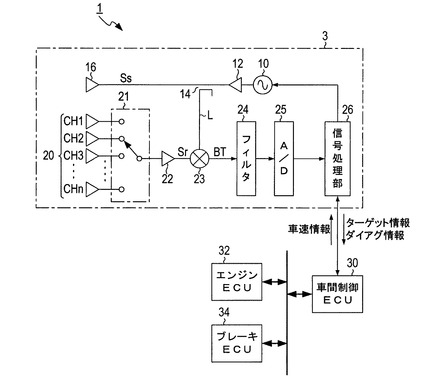
図1は、本発明を適用した車両制御システム1の概略構成を示したブロック図である。
【0026】
図1に示すように、この車両制御システム1は、車両の前面に設置され車両前方の所定検出範囲内に位置する物体を検知するレーダセンサ3(障害物検出装置、異常検出装置)を備えている。また、レーダセンサ3は、車間制御電子制御装置(以下、「車間制御ECU」)30に接続され、その車間制御ECU30は、LAN通信バスを介して、エンジン電子制御装置(以下、「エンジンECU」)32、ブレーキ電子制御装置(以下、「ブレーキECU」)34などの各種ECUと接続されている。なお、各ECUは、いずれも周知のマイクロコンピュータを中心に構成され、少なくともLAN通信バスを介して通信を実施するためのバスコントローラを備えている。
【0027】
レーダセンサ3は、FMCW方式のいわゆる「ミリ波レーダ」として構成されたものであり、周波数変調されたミリ波帯のレーダ波を送受信することにより、各種物体(先行車両,路側物等の障害物)を認識し、これらの認識結果に基づいて、自車両の前方を走行する先行車両に関するターゲット情報や、当該レーダセンサ3の状態を示すダイアグ情報を作成して、車間制御ECU30に送信する。なお、ターゲット情報には、先行車両との相対速度、および先行車両の位置(距離,方位)が少なくとも含まれ、また、ダイアグ情報には、レーダ波の受信面の汚れ等の異常に基づく検出性能の低下の有無を示す情報が少なくとも含まれている。
【0028】
ブレーキECU34は、図示しないステアリングセンサ、ヨーレートセンサからの検出情報(操舵角、ヨーレート)に加え、図示しないM/C圧センサからの情報に基づいて判断したブレーキペダル状態を車間制御ECU30に送信するとともに、車間制御ECU30から目標加速度、ブレーキ要求等を受信し、これら受信した情報や判断したブレーキ状態に従って、ブレーキ油圧回路に備えられた増圧制御弁・減圧制御弁を開閉するブレーキアクチュエータを駆動することでブレーキ力を制御するように構成されている。
【0029】
エンジンECU32は、図示しない車速センサ、スロットル開度センサ、アクセルペダル開度センサからの検出情報(車速、エンジン制御状態、アクセル操作状態)を車間制御ECU30に送信するとともに、車間制御ECU30からは目標加速度、フューエルカット要求等を受信し、これら受信した情報から特定される運転状態に応じて、内燃機関のスロットル開度を調整するスロットルアクチュエータ等に対して駆動命令を出力することで、内燃機関の駆動力を制御するように構成されている。
【0030】
車間制御ECU30は、レーダセンサ3からターゲット情報,ダイアグ情報、エンジンECU32から車速やエンジン制御状態、ブレーキECU34から操舵角、ヨーレート、ブレーキ制御状態等を受信する。また、車間制御ECU30は、図示しないクルーズコントロールスイッチ,目標車間設定スイッチなどによる設定値、およびレーダセンサ3から受信したターゲット情報に基づいて、先行車両との車間距離を適切な距離に調節するための制御指令として、エンジンECU32に対しては、目標加速度、フューエルカット要求等を送信し、ブレーキECU34に対しては、目標加速度、ブレーキ要求等を送信する。
【0031】
また、レーダセンサ3から受信したダイアグ情報に、検出性能が低下していることが示されている場合は、レーダセンサ3からのターゲット情報の使用を禁止又は制限する処理を実行する。
【0032】
[レーダセンサの外観]
ここで図2は、レーダセンサ3の外観図である。
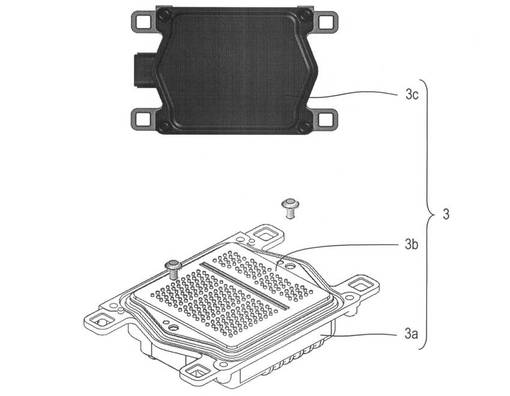
図2に示すように、レーダセンサ3は回路素子を収納する開口部位を有した箱状の筐体3aと、筐体3aの開口部位を覆うように設置され、レーダ波を送受信するアンテナが配列されたアンテナ基板3bと、レーダ波を透過する樹脂で形成され、アンテナ基板3bを被覆するようにして筐体3aに取り付けられるレドーム3cとを備えている。なお、図2は、レドーム3cを取り外した状態を示し、筐体3a,アンテナ基板3bの部分が斜視図、レドーム3cの部分が平面図である。
【0033】
そして、レーダセンサ3は、フロントバンパ等の車室外に、レドーム3cの取付面(すなわち、レーダ波の送受信面)をレーダ波の放射方向に向けた状態で取り付けられる。
[レーダセンサの詳細構成]
ここで、レーダセンサ3の詳細構成について説明する。
【0034】
レーダセンサ3は、図1に示すように、時間に対して周波数が直線的に増加する上り区間、および周波数が直線的に減少する下り区間を有するように変調されたミリ波帯の高周波信号を生成する発振器10と、発振器10が生成する高周波信号を増幅する増幅器12と、増幅器12の出力を送信信号Ssとローカル信号Lとに電力分配する分配器14と、送信信号Ssに応じたレーダ波を放射する送信アンテナ16と、レーダ波を受信するn個の受信アンテナからなる受信アンテナ部20とを備えている。
【0035】
また、レーダセンサ3は、受信アンテナ部20を構成するアンテナのいずれかを順次選択し、選択されたアンテナからの受信信号Srを後段に供給する受信スイッチ21と、受信スイッチ21から供給される受信信号Srを増幅する増幅器22と、増幅器22にて増幅された受信信号Srおよびローカル信号Lを混合してビート信号BTを生成するミキサ23と、ミキサ23が生成したビート信号BTから不要な信号成分を除去するフィルタ24と、フィルタ24の出力をサンプリングしデジタルデータに変換するA/D変換器25と、発振器10の起動,停止やA/D変換器25を介したビート信号BTのサンプリングを制御するとともに、そのサンプリングデータを用いた信号処理(ターゲット情報,ダイアグ情報の生成)や、車間制御ECU30との通信を行い、信号処理に必要な情報や信号処理の結果として得られる情報を送受信する処理などを実行する信号処理部26とを備えている。
【0036】
なお、受信アンテナ部20を構成する各アンテナは、それぞれ受信チャンネルCH1〜CHnに割り当てられるものとする。また、信号処理部26は、CPUおよびROM,RAM等のメモリ(中心軸記録部、履歴記録部)を少なくとも備えた周知のマイクロコンピュータを中心に構成され、さらにA/D変換器25を介して取り込んだデータについて、高速フーリエ変換(FFT)処理などを実行するための演算処理装置(例えばDSP)等を備えている。
【0037】
[レーダセンサの動作概要]
このように構成されたレーダセンサ3では、信号処理部26からの指令に従って発振器10が起動すると、その発振器10が高周波信号を生成し、増幅器12が増幅した高周波信号を、分配器14が電力分配することにより、送信信号Ssおよびローカル信号Lを生成し、このうち送信信号Ssは、送信アンテナ16を介してレーダ波として送出される。
【0038】
そして、送信アンテナ16から送出され物体に反射して戻ってきた反射波は、受信アンテナ部20を構成する全ての受信アンテナにて受信され、受信スイッチ21によって選択されている受信チャンネルCHi(i=1〜n)の受信信号Srのみが増幅器22で増幅されたあとミキサ23に供給される。
【0039】
すると、ミキサ23では、この受信信号Srに分配器14からのローカル信号Lを混合することによりビート信号BTを生成する。このビート信号BTは、フィルタ24にて不要な信号成分が除去された後、A/D変換器25にてサンプリングされ、信号処理部26に取り込まれる。
【0040】
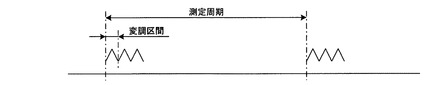
なお、受信スイッチ21は、上り区間および下り区間からなるレーダ波の1変調区間の間に、すべての受信チャンネルCH1〜CHnが所定の回(例えば512回)ずつ選択されるよう切り替えられ、また、A/D変換器25は、この切り替えのタイミングに同期してサンプリングを行う。つまり、レーダ波の1変調区間の間に、各受信チャンネルCH1〜CHn毎かつレーダ波の上り/下り各区間毎にサンプリングデータが蓄積されることになる。
【0041】
そして、レーダセンサ3の信号処理部26では、図3に示すように、予め設定された測定周期(本実施形態では100ms)毎に、3変調区間分のレーダ送信を実行し、その3つの変調区間のそれぞれで得られるサンプリングデータに基づいて、ターゲット情報の生成に必要な情報の収集や受信面の汚れ等の異常の判定を行う。なお、ターゲット情報の生成に関する処理(すなわち、反射波に基づいて中心軸の方向に対する障害物が位置する角度およびこの障害物までの距離を検出する処理)は、周知の処理と同様であるため、説明を省略する(障害物検出手段)。
【0042】
[軸ずれ補正処理]
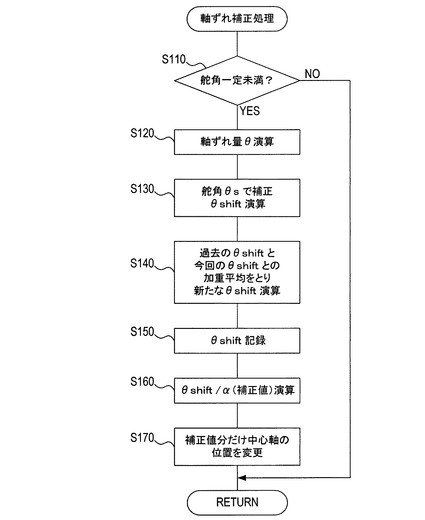
本実施形態のレーダセンサ3においては、センサの中心軸の方向を補正する軸ずれ補正処理を実施する。図4は信号処理部26が実行する軸ずれ補正処理を示すフローチャートである。本処理は、障害物の位置(特に方位)を検出する際の基準となる、自車両の進行方向(前方)正面となる位置(中心軸の方向)を、障害物との相対移動ベクトルに基づき補正する処理である。
【0043】
なお、軸ずれ補正処理は、特許第3331882号公報、特許第3414267号公報等に記載されている処理と同様の処理としても実現することができるため、軸ずれ補正処理の説明は簡素なものとする。また、S120〜S140の処理は、本発明でいう偏向量検出手段に相当する。
【0044】
軸ずれ補正処理は、前述の測定周期毎に起動される処理であって、図4に示すように、まず、自車両の舵角を図示しないステアリングセンサから取得し、この舵角が直線走行していると認定することができる程度の基準舵角未満であるか否かを判定する(S110)。自車両の舵角が基準舵角以上であれば(S110:NO)、自車両が旋回中であり、正確な軸ずれ量が検出できない虞があるため、軸ずれ補正処理を終了する。
【0045】
また、自車両の舵角が基準舵角未満であれば(S110:YES)、自車両が概ね直線走行をしていることを示す。この場合には、反射波に基づく受信信号(複数の受信チャンネル毎の受信信号)を取得し、軸ずれ量θを演算する(S120:受信信号取得手段)。
【0046】
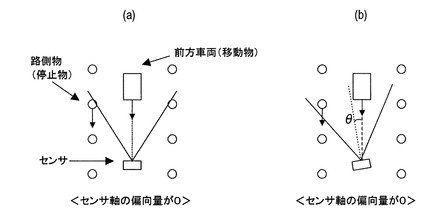
この軸ずれ量θは、障害物に対する自車両の相対移動ベクトルを検出し、この相対移動ベクトルとRAM等のメモリに記録された中心軸の方向とがなす角を演算することにより求められる。つまり、相対移動ベクトルと中心軸の方向とが一致すれば、図5(a)に示すように、軸ずれ量θ(センサ軸の偏向量)が0となり、相対移動ベクトルと中心軸の方向とが一致しなければ、図5(b)に示すように、0ではない軸ずれ量θが検出される。
【0047】
そして、軸ずれ量θから自車両の舵角θsを減算する補正を行い、この値をθshiftに設定する(S130)。なお、自車両の舵角θsが無視できる場合には、S130を省略してもよい。
【0048】
続いて、今回の処理において求めたθshiftを前回の処理において求めたθshiftを用いて補正する。例えば、各θshiftの値の加重平均をとり、この値を新たなθshiftに設定する(S140)。
【0049】
そして、θshiftをRAM等のメモリに履歴として記録し(S150:偏向量記録手段)、今回の処理において中心軸の方向を補正する際の補正値を演算する(S160:補正量演算手段)。この補正値としては、例えば、θshiftを1よりも大きな定数αで除した値を採用してもよいし、θshiftの値の大きさに応じた所定値を採用してもよい。つまり、この補正値は、θshiftの値を1回の処理で0にするのではなく、複数回に分けて0に近づけるような値に設定される。
【0050】
続いて、補正値の分だけ中心軸の方向を補正し、補正後の中心軸の方向をRAM等のメモリに記録し(S170:記録制御手段)、軸ずれ補正処理を終了する。なお、次回の軸ずれ補正処理の際には、補正後の中心軸の方向を利用して軸ずれ量θ等が演算されることになる。
【0051】
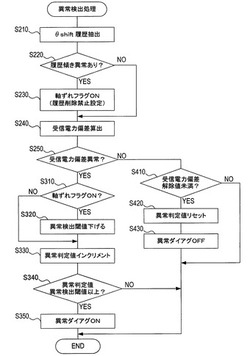
[異常検出処理]
次に、軸ずれ補正処理による結果を利用して、レーダセンサ3の異常を検出する処理について図6を用いて説明する。図6は信号処理部26が軸ずれ補正処理とは並行して実施する異常検出処理を示すフローチャートである。
【0052】
なお、異常検出処理において、S210〜S230の処理は本発明でいう第1異常判定手段に相当し、S340,S350の処理は本発明でいう第2異常判定手段に相当する。また、異常検出処理は、繰り返し実施される処理であるが、この繰り返し周期は、軸ずれ補正処理と同一の周期か、これよりも長い周期で実施されればよい。
【0053】
ここで、レーダセンサ3の異常とは、衝突による衝撃等によりセンサ軸自体がずれてしまった場合や、受信面の一部に汚れやひび割れ等が発生した場合等、一部のチャンネルによって反射波の受信が正常に行われない状態を示す。
【0054】
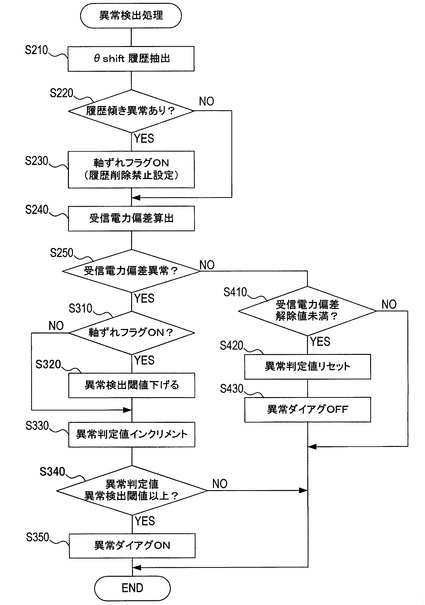
異常検出処理では、まず、RAM等のメモリに記録されたθshiftの履歴を抽出する(S210)。そして、この履歴をグラフとして表示したときの傾きに異常があるか否かを判定する(S220)。
【0055】
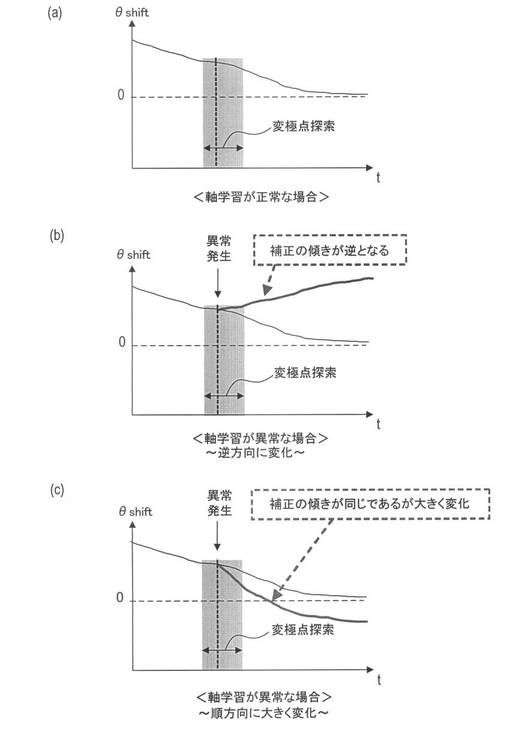
ここで、図7はθshiftの履歴を示すグラフである。レーダセンサ3の異常がない場合には、図7(a)に示すように、θshiftは時間の経過とともに0に近づく。上述の軸ずれ補正処理で、θshiftが時間の経過とともに0に近づくように中心軸の方向を補正しているからである。
【0056】
しかし、レーダセンサ3に異常がある場合には、図7(b)の太線に示すように、θshiftの絶対値が時間の経過とともに増加したり、図7(c)の太線に示すように、θshiftの絶対値が時間の経過とともに極端に(基準変化率を超えて)変化したりする。そこで、S220の処理では、予め想定されるθshiftの変化パターンを基準パターンとしてROM等のメモリに記録しておき、実際に検出されるθshiftの変化パターンが基準パターンから逸脱した場合(例えば、図7における細線で示す基準パターンから20%以上乖離した場合)に、傾きに異常があると判定する。
【0057】
傾きに異常があれば(S220:YES)、RAM等のメモリにおいて軸ずれフラグをON状態に設定し(S230:異常記録手段、保護手段)、S240の処理に移行する。なお、本実施形態におけるRAM等のメモリは、車両の電源(例えばイグニッションスイッチ)がOFF状態にされると、消去されるよう構成されているが、軸ずれフラグがON状態にされると、例えば不揮発性のメモリにバックアップがなされ、この履歴、フラグ、ダイアグ等の異常を特定するための情報が車両から消去されない状態となる。
【0058】
一方、傾きに異常がなければ(S220:NO)、直ちにS240の処理に移行する。続いて、S240の処理では、各チャンネルによって受信された受信電力の偏差(差分)を算出する(S240:偏差算出手段)。この処理では、複数の受信チャンネルから受信信号が得られる毎に、受信チャンネルの中で受信信号の電力値(受信電力)が最大となるものを最大チャンネルとして抽出し、受信チャンネル毎に最大チャンネルとの電力値の偏差を算出する。
そして、各受信電力の偏差に異常があるか否かを判定する(S250)。ここでは、各受信電力の偏差に基準値(例えば最大チャンネルの受信電力の20%:候補閾値)以上異なるものがあれば異常であると判定する。各受信電力の偏差に異常があれば(S250:YES)、軸ずれフラグがON状態であるか否かを判定する(S310)。
【0059】
軸ずれフラグがON状態であれば(S310:YES)、異常を出力するか否かの基準となる値である異常検出閾値を小さな値に変更し(S320:閾値変更手段)、S330の処理に移行する。S320の処理では、例えば、異常検出閾値を半分程度の値にするが、この閾値が極端に小さくならないように、下限値未満にはならないようにしてもよい。
【0060】
また、軸ずれフラグがOFF状態であれば(S310:NO)、直ちにS330の処理に移行し、RAM等のメモリにおいて異常を判定するための値である異常判定値をインクリメントし(S330:判定値カウント手段)、異常判定値と異常検出閾値とを比較する(S340)。異常判定値が異常検出閾値以上であれば(S340:YES)、異常ダイアグをON状態とし(S350:異常出力手段)、異常検出処理を終了する。また、異常判定値が異常検出閾値未満であれば(S340:NO)、直ちに異常検出処理を終了する。
【0061】
このように異常ダイアグがON状態となると、例えば不揮発性のメモリにバックアップがなされ、この履歴、フラグ、ダイアグ等の異常を特定するための情報が車両から消去されない状態にするとともに、この異常ダイアグ(異常がある旨)を車間制御ECU30に対して出力する。
【0062】
ところで、S250の処理において、各受信電力の偏差に異常がなければ(S250:NO)、各受信電力の偏差の最大値と上記基準値よりも小さな値に設定された解除値とを比較する(S410)。各受信電力の偏差の最大値が解除値未満であれば(S410:YES)、異常判定値をリセットし(S420)、異常ダイアグをOFF状態に設定し(S430)、異常検出処理を終了する。また、各受信電力の偏差の最大値が解除値以上であれば(S410:NO)、直ちに以上検出処理を終了する。
【0063】
なお、本実施形態において、一度ON状態となった軸ずれフラグは、上記の処理ではOFF状態とはされない。軸ずれフラグは、レーダセンサ3の修理やメンテナンスのときに別の処理が実施され、このとき、軸ずれの調整が完了した旨を示す調整完了フラグが信号処理部26のRAM等のメモリでON状態となると、OFF状態となる。
【0064】
[本実施形態による効果]
以上のように詳述した車両制御システム1を構成するレーダセンサ3において、信号処理部26は反射波に基づく受信信号を取得し、この受信信号から予め信号処理部26のRAM等のメモリに記録された中心軸の方向に対する障害物が位置する角度および障害物までの距離を繰り返し検出する。そして、信号処理部26は、障害物に対する自車両の相対移動ベクトルと中心軸の方向とがなす角である偏向量を繰り返し検出し、偏向量が0に近づくようにこの偏向量を複数回に分けて補正する際の補正量を繰り返し演算する。
【0065】
さらに信号処理部26は、中心軸の方向を補正量の分だけ補正して得られる新たな中心軸の方向を、障害物を検出する際に利用する中心軸の方向として信号処理部26のRAM等のメモリに記録させ、偏向量を履歴として信号処理部26のRAM等のメモリに記録させる。そして、信号処理部26は、偏向量の変化パターンが予め設定された基準パターンから逸脱する場合にレーダセンサ3に異常があると判定する。
【0066】
すなわち、本発明では、自車両の相対移動ベクトルと今回の処理開始までに求められた中心軸の方向とがなす角である偏向量を検出し、この偏向量が0に近づくように中心軸の方向を補正する。そして、この補正後の中心軸の方向を利用して、再度、偏向量を検出し、この偏向量がさらに0に近づくように中心軸の方向を補正する。このような処理を繰り返すことで、偏向量を段階的に0に収束させる。
【0067】
このような構成では、レーダセンサ3に異常がない場合には、偏向量が所定の繰り返し回数で0に近づくような偏向量の変化パターンが得られるものと予想される。一方で、レーダセンサ3に汚れ等の異常がある場合には、異常がない場合とは異なる偏向量の変化パターンが得られるものと考えられる。そこで、レーダセンサ3では、異常がない場合に得られると予想される変化パターンを基準パターンとして保持しておき、偏向量の変化パターンがこの基準パターンから逸脱する場合にレーダセンサ3に異常があると判定するようにしている。
【0068】
このようなレーダセンサ3によれば、偏向量が段階的に0に近づくように中心軸の方向を補正する構成において、偏向量を記録し、この変化パターンを基準パターンと比較するだけで、レーダセンサ3の異常を検出することができる。よって、簡素な処理でレーダセンサ3の異常を検出できる。
【0069】
また、レーダセンサ3において信号処理部26は、偏向量が、時間の経過とともに増加したときに、異常であると判定する。
このようなレーダセンサ3によれば、時間の経過とともに0に近づくはずの偏向量が増加したときに、異常があると判断することができる。
【0070】
また、レーダセンサ3において信号処理部26は、補正後偏向量または補正後偏向量に連動するパラメータが予め設定された基準変化率を超えて変化したときにも、異常であると判定する。
【0071】
このようなレーダセンサ3によれば、時間の経過とともに偏向量が0に近づいていたとしても、このときの変化率が基準変化率を超えて異常に大きな場合に、異常であると判断することができる。
【0072】
さらに、上記レーダセンサ3においては、偏向量の履歴は、このレーダセンサ3の電源がOFF状態にされると削除されるよう構成されており、信号処理部26は、異常であると判定された際に、異常がある旨を記録し、異常がある旨が記録された場合に、履歴が削除されないよう保護する。
【0073】
このようなレーダセンサ3によれば、異常が発生した場合に履歴が削除されないようにするので、異常が発生したときの原因を履歴によって解明しやすくすることができる。
また、上記レーダセンサ3において信号処理部26は、反射波を互いに異なるアンテナ素子で受信する複数の受信チャンネルを有するレーダセンサ3から複数の受信チャンネル毎の受信信号を取得し、複数の受信チャンネルから受信信号が得られる毎に、受信チャンネルの中で受信信号の電力値が最大となるものを最大チャンネルとして抽出し、受信チャンネル毎に最大チャンネルとの電力値の偏差を算出する。そして、信号処理部26は、受信チャンネルのうち、信号処理部26にて算出される偏差が予め設定された候補閾値以上となるものがあれば、異常判定値をインクリメントし、異常判定値が予め設定された異常判定閾値以上になった場合に、レーダセンサ3に異常があると判定する。
【0074】
このようなレーダセンサ3によれば、受信電力の偏差が大きな状態が継続的に発生した場合にも、異常であると判定することができる。
さらに、上記レーダセンサ3において信号処理部26は、偏向量の変化パターンが基準パターンから逸脱することによる異常があると判定された場合、異常判定閾値をより小さな値に変更する。
【0075】
このようなレーダセンサ3によれば、偏向量の変化パターンが基準パターンから逸脱することによる異常が検出された場合に、受信電力の偏差が大きいことによる異常を判定するまでの時間を短縮することができる。
【0076】
また、上記レーダセンサ3において信号処理部26は、受信電力の偏差が大きいことによる異常があると判定された場合、異常がある旨を出力する。
このようなレーダセンサ3によれば、信号処理部26による異常がある旨を出力することができる。このとき、偏向量の変化パターンが基準パターンから逸脱することによる異常があった場合、履歴を参照することで異常の原因を特定し易くすることができる。
【0077】
さらに、上記レーダセンサ3において信号処理部26は、最新の偏向量に過去において検出された偏向量を加味した偏向量を繰り返し検出する。
このようなレーダセンサ3によれば、過去において検出された偏向量を加味して偏向量を検出するので、ノイズや振動等の影響で一時的に偏向量が大きく変化した場合に、異常であると誤検出してしまうことを防止することができる。
【0078】
[その他の実施形態]
本発明の実施の形態は、上記の実施形態に何ら限定されることはなく、本発明の技術的範囲に属する限り種々の形態を採りうる。
【0079】
例えば、上記実施形態において、旋回中には軸ずれ補正処理を終了するようにしたが、正確に軸ずれ量を検出できる場合には軸ずれを補正する処理を継続してもよい。また、本実施形態ではミリ波レーダに対して本発明を適用したが、レーザレーダやソナー等の距離検出装置の異常を検出する装置にも本発明を適用することができる場合がある。
【0080】
また、上記実施形態においては、偏向量自体の変化パターンに基づいて異常があるか否かを判定したが、偏向量自体でなく、偏向量に連動するパラメータを利用してもよい。
【符号の説明】
【0081】
1…車両制御システム、3…レーダセンサ、3a…筐体、3b…アンテナ基板、3c…レドーム、10…発振器、12…増幅器、14…分配器、16…送信アンテナ、20…受信アンテナ部、21…受信スイッチ、22…増幅器、23…ミキサ、24…フィルタ、25…A/D変換器、26…信号処理部、30…車間制御ECU、32…エンジンECU、34…ブレーキECU。
【技術分野】
【0001】
本発明は、車両に搭載され、所定の送信波を照射し、その反射波に基づいて障害物を検出する障害物検出装置の異常を検出する異常検出装置、および異常検出プログラムに関する。
【背景技術】
【0002】
上記異常検出装置として、反射波を受信する受信面の汚れを検出するものが知られている(例えば、特許文献1参照)。この異常検出装置では、複数のチャンネルを有する受信部のそれぞれが反射波を受け、入力された反射波に基づく受信電力が最大となるチャンネルにおける電力と他のチャンネルにおける電力との偏差が閾値を超えた場合に受信面が汚れていると判定する。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2009−192442号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、上記異常検出装置では、受信面の汚れ等の異常を検出するために、全てのチャンネルによる受信電力を順次比較する必要があり、この際の処理が煩雑になるという問題点があった。
【0005】
そこで、このような問題点を鑑み、所定の送信波を照射し、その反射波に基づいて障害物を検出する障害物検出装置の異常を検出する異常検出装置および異常検出プログラムにおいて、簡素な処理で異常検出装置の異常を検出できるようにすることを第1の目的とし、異常を検出する際の検出速度を向上できるようにすることを第2の目的とする。
【課題を解決するための手段】
【0006】
かかる目的を達成するために成された第1の構成の異常検出装置において、受信信号取得手段は反射波に基づく受信信号を取得し、障害物検出手段は、この受信信号から予め中心軸記録部に記録された中心軸の方向に対する障害物が位置する角度および障害物までの距離を繰り返し検出する。そして、偏向量検出手段は、障害物に対する自車両の相対移動ベクトルと中心軸の方向とがなす角である偏向量を繰り返し検出し、補正量演算手段は、偏向量が0に近づくようにこの偏向量を複数回に分けて補正する際の補正量を繰り返し演算する。
【0007】
さらに記録制御手段は、中心軸の方向を補正量の分だけ補正して得られる新たな中心軸の方向を障害物検出手段が障害物を検出する際に利用する中心軸の方向として中心軸記録部に記録させ、偏向量記録手段は、偏向量または偏向量に連動するパラメータを履歴として履歴記録部に記録させる。そして、第1異常判定手段は、偏向量または偏向量に連動するパラメータの変化パターンが予め設定された基準パターンから逸脱する場合に障害物検出装置に異常があると判定する。
【0008】
すなわち、本発明では、自車両の相対移動ベクトルと今回の処理開始までに求められた中心軸の方向とがなす角である偏向量を検出し、この偏向量が0に近づくように中心軸の方向を補正する。そして、この補正後の中心軸の方向を利用して、再度、偏向量を検出し、この偏向量がさらに0に近づくように中心軸の方向を補正する。このような処理を繰り返すことで、偏向量を段階的に0に収束させる。
【0009】
このような構成では、異常検出装置に異常がない場合には、偏向量が所定の繰り返し回数で0に近づくような偏向量の変化パターンが得られるものと予想される。一方で、異常検出装置に汚れ等の異常がある場合には、異常がない場合とは異なる偏向量の変化パターンが得られるものと考えられる。そこで、本発明では、異常がない場合に得られると予想される変化パターンを基準パターンとして保持しておき、偏向量または偏向量に連動するパラメータの変化パターンがこの基準パターンから逸脱する場合に異常検出装置に異常があると判定するようにしている。
【0010】
このような異常検出装置によれば、偏向量が段階的に0に近づくように中心軸の方向を補正する構成において、偏向量(または偏向量に連動するパラメータ)を記録し、この変化パターンを基準パターンと比較するだけで、異常検出装置の異常を検出することができる。よって、簡素な処理で異常検出装置の異常を検出できる。
【0011】
ところで、上記異常検出装置においては、第2の構成の異常検出装置のように、第1異常判定手段は、偏向量または偏向量に連動するパラメータが、時間の経過とともに増加したときに、異常であると判定するようにしてもよい。
【0012】
このような異常検出装置によれば、時間の経過とともに0に近づくはずの偏向量が増加したときに、異常があると判断することができる。
また、上記異常検出装置においては、第3の構成の異常検出装置のように、第1異常判定手段は、補正後偏向量または補正後偏向量に連動するパラメータが予め設定された基準変化率を超えて変化したときに、異常であると判定するようにしてもよい。
【0013】
このような異常検出装置によれば、時間の経過とともに偏向量が0に近づいていたとしても、このときの変化率が基準変化率を超えて異常に大きな場合に、異常であると判断することができる。
【0014】
さらに、上記異常検出装置においては、第4の構成の異常検出装置のように、偏向量または偏向量に連動するパラメータの履歴は、この異常検出装置の電源がOFF状態にされると削除されるよう構成されており、第1異常判定手段によって異常であると判定された際に、異常がある旨を記録する異常記録手段と、異常がある旨が記録された場合に、履歴および異常がある旨が削除されないよう保護する保護手段と、を備えていてもよい。
【0015】
このような異常検出装置によれば、異常が発生した場合に履歴が削除されないようにするので、異常が発生したときの原因を履歴によって解明しやすくすることができる。
また、上記異常検出装置においては、第5の構成の異常検出装置のように、受信信号取得手段は、反射波を互いに異なるアンテナ素子で受信する複数の受信チャンネルを有する障害物検出装置から複数の受信チャンネル毎の受信信号を取得し、複数の受信チャンネルから受信信号が得られる毎に、受信チャンネルの中で受信信号の電力値が最大となるものを最大チャンネルとして抽出し、受信チャンネル毎に最大チャンネルとの電力値の偏差を算出する偏差算出手段と、受信チャンネルのうち、偏差算出手段にて算出される偏差が予め設定された候補閾値以上となるものがあれば、異常判定値をインクリメントする判定値カウント手段と、異常判定値が予め設定された異常判定閾値以上になった場合に、障害物検出装置に異常があると判定する第2異常判定手段と、を備えていてもよい。
【0016】
このような異常検出装置によれば、受信電力の偏差が大きな状態が継続的に発生した場合にも、異常であると判定することができる。
さらに、上記異常検出装置においては、第6の構成の異常検出装置のように、第1異常判定手段によって異常があると判定された場合、異常判定閾値をより小さな値に変更する閾値変更手段、を備えていてもよい。
【0017】
このような異常検出装置によれば、第1異常判定手段によって異常が検出された場合に、第2異常判定手段によって異常であると判定されるまでの時間を短縮することができる。
【0018】
また、上記異常検出装置においては、第7の構成の異常検出装置のように、第2異常判定手段によって異常があると判定された場合、異常がある旨を出力する異常出力手段、を備えていてもよい。
【0019】
このような異常検出装置によれば、第2異常判定手段による異常がある旨を出力することができる。そして、第4の構成のように、第1異常判定手段による判定結果を保持していれば、異常の原因を特定しやすくすることができる。
【0020】
上記異常検出装置においては、第8の構成の異常検出装置のように、偏向量検出手段は、最新の偏向量に過去において検出された偏向量を加味した偏向量を繰り返し検出するようにしてもよい。
【0021】
このような異常検出装置によれば、過去において検出された偏向量を加味して偏向量を検出するので、ノイズや振動等の影響で一時的に偏向量が大きく変化した場合に、異常であると誤検出してしまうことを防止することができる。
【0022】
また、上記目的を達成するためのプログラムは、コンピュータを、上記何れか1項に記載の異常検出装置を構成する各手段として機能させるための異常検出プログラムであることを特徴とする。
【0023】
このような異常検出プログラムによれば、少なくとも請求項1に記載の異常検出装置と同様の効果を享受することができる。
【図面の簡単な説明】
【0024】
【図1】発明が適用された車両制御システムの構成を示すブロック図である。
【図2】レーダセンサの外観図である。
【図3】レーダ波の送信タイミングを示す説明図である。
【図4】軸ずれ補正処理を示すフローチャートである。
【図5】軸ずれ量θについての説明図である。
【図6】異常検出処理を示すフローチャートである。
【図7】θshiftの履歴を示すグラフである。
【発明を実施するための形態】
【0025】
以下に本発明にかかる実施の形態を図面とともに説明する。
[本実施形態の全体構成]
図1は、本発明を適用した車両制御システム1の概略構成を示したブロック図である。
【0026】
図1に示すように、この車両制御システム1は、車両の前面に設置され車両前方の所定検出範囲内に位置する物体を検知するレーダセンサ3(障害物検出装置、異常検出装置)を備えている。また、レーダセンサ3は、車間制御電子制御装置(以下、「車間制御ECU」)30に接続され、その車間制御ECU30は、LAN通信バスを介して、エンジン電子制御装置(以下、「エンジンECU」)32、ブレーキ電子制御装置(以下、「ブレーキECU」)34などの各種ECUと接続されている。なお、各ECUは、いずれも周知のマイクロコンピュータを中心に構成され、少なくともLAN通信バスを介して通信を実施するためのバスコントローラを備えている。
【0027】
レーダセンサ3は、FMCW方式のいわゆる「ミリ波レーダ」として構成されたものであり、周波数変調されたミリ波帯のレーダ波を送受信することにより、各種物体(先行車両,路側物等の障害物)を認識し、これらの認識結果に基づいて、自車両の前方を走行する先行車両に関するターゲット情報や、当該レーダセンサ3の状態を示すダイアグ情報を作成して、車間制御ECU30に送信する。なお、ターゲット情報には、先行車両との相対速度、および先行車両の位置(距離,方位)が少なくとも含まれ、また、ダイアグ情報には、レーダ波の受信面の汚れ等の異常に基づく検出性能の低下の有無を示す情報が少なくとも含まれている。
【0028】
ブレーキECU34は、図示しないステアリングセンサ、ヨーレートセンサからの検出情報(操舵角、ヨーレート)に加え、図示しないM/C圧センサからの情報に基づいて判断したブレーキペダル状態を車間制御ECU30に送信するとともに、車間制御ECU30から目標加速度、ブレーキ要求等を受信し、これら受信した情報や判断したブレーキ状態に従って、ブレーキ油圧回路に備えられた増圧制御弁・減圧制御弁を開閉するブレーキアクチュエータを駆動することでブレーキ力を制御するように構成されている。
【0029】
エンジンECU32は、図示しない車速センサ、スロットル開度センサ、アクセルペダル開度センサからの検出情報(車速、エンジン制御状態、アクセル操作状態)を車間制御ECU30に送信するとともに、車間制御ECU30からは目標加速度、フューエルカット要求等を受信し、これら受信した情報から特定される運転状態に応じて、内燃機関のスロットル開度を調整するスロットルアクチュエータ等に対して駆動命令を出力することで、内燃機関の駆動力を制御するように構成されている。
【0030】
車間制御ECU30は、レーダセンサ3からターゲット情報,ダイアグ情報、エンジンECU32から車速やエンジン制御状態、ブレーキECU34から操舵角、ヨーレート、ブレーキ制御状態等を受信する。また、車間制御ECU30は、図示しないクルーズコントロールスイッチ,目標車間設定スイッチなどによる設定値、およびレーダセンサ3から受信したターゲット情報に基づいて、先行車両との車間距離を適切な距離に調節するための制御指令として、エンジンECU32に対しては、目標加速度、フューエルカット要求等を送信し、ブレーキECU34に対しては、目標加速度、ブレーキ要求等を送信する。
【0031】
また、レーダセンサ3から受信したダイアグ情報に、検出性能が低下していることが示されている場合は、レーダセンサ3からのターゲット情報の使用を禁止又は制限する処理を実行する。
【0032】
[レーダセンサの外観]
ここで図2は、レーダセンサ3の外観図である。
図2に示すように、レーダセンサ3は回路素子を収納する開口部位を有した箱状の筐体3aと、筐体3aの開口部位を覆うように設置され、レーダ波を送受信するアンテナが配列されたアンテナ基板3bと、レーダ波を透過する樹脂で形成され、アンテナ基板3bを被覆するようにして筐体3aに取り付けられるレドーム3cとを備えている。なお、図2は、レドーム3cを取り外した状態を示し、筐体3a,アンテナ基板3bの部分が斜視図、レドーム3cの部分が平面図である。
【0033】
そして、レーダセンサ3は、フロントバンパ等の車室外に、レドーム3cの取付面(すなわち、レーダ波の送受信面)をレーダ波の放射方向に向けた状態で取り付けられる。
[レーダセンサの詳細構成]
ここで、レーダセンサ3の詳細構成について説明する。
【0034】
レーダセンサ3は、図1に示すように、時間に対して周波数が直線的に増加する上り区間、および周波数が直線的に減少する下り区間を有するように変調されたミリ波帯の高周波信号を生成する発振器10と、発振器10が生成する高周波信号を増幅する増幅器12と、増幅器12の出力を送信信号Ssとローカル信号Lとに電力分配する分配器14と、送信信号Ssに応じたレーダ波を放射する送信アンテナ16と、レーダ波を受信するn個の受信アンテナからなる受信アンテナ部20とを備えている。
【0035】
また、レーダセンサ3は、受信アンテナ部20を構成するアンテナのいずれかを順次選択し、選択されたアンテナからの受信信号Srを後段に供給する受信スイッチ21と、受信スイッチ21から供給される受信信号Srを増幅する増幅器22と、増幅器22にて増幅された受信信号Srおよびローカル信号Lを混合してビート信号BTを生成するミキサ23と、ミキサ23が生成したビート信号BTから不要な信号成分を除去するフィルタ24と、フィルタ24の出力をサンプリングしデジタルデータに変換するA/D変換器25と、発振器10の起動,停止やA/D変換器25を介したビート信号BTのサンプリングを制御するとともに、そのサンプリングデータを用いた信号処理(ターゲット情報,ダイアグ情報の生成)や、車間制御ECU30との通信を行い、信号処理に必要な情報や信号処理の結果として得られる情報を送受信する処理などを実行する信号処理部26とを備えている。
【0036】
なお、受信アンテナ部20を構成する各アンテナは、それぞれ受信チャンネルCH1〜CHnに割り当てられるものとする。また、信号処理部26は、CPUおよびROM,RAM等のメモリ(中心軸記録部、履歴記録部)を少なくとも備えた周知のマイクロコンピュータを中心に構成され、さらにA/D変換器25を介して取り込んだデータについて、高速フーリエ変換(FFT)処理などを実行するための演算処理装置(例えばDSP)等を備えている。
【0037】
[レーダセンサの動作概要]
このように構成されたレーダセンサ3では、信号処理部26からの指令に従って発振器10が起動すると、その発振器10が高周波信号を生成し、増幅器12が増幅した高周波信号を、分配器14が電力分配することにより、送信信号Ssおよびローカル信号Lを生成し、このうち送信信号Ssは、送信アンテナ16を介してレーダ波として送出される。
【0038】
そして、送信アンテナ16から送出され物体に反射して戻ってきた反射波は、受信アンテナ部20を構成する全ての受信アンテナにて受信され、受信スイッチ21によって選択されている受信チャンネルCHi(i=1〜n)の受信信号Srのみが増幅器22で増幅されたあとミキサ23に供給される。
【0039】
すると、ミキサ23では、この受信信号Srに分配器14からのローカル信号Lを混合することによりビート信号BTを生成する。このビート信号BTは、フィルタ24にて不要な信号成分が除去された後、A/D変換器25にてサンプリングされ、信号処理部26に取り込まれる。
【0040】
なお、受信スイッチ21は、上り区間および下り区間からなるレーダ波の1変調区間の間に、すべての受信チャンネルCH1〜CHnが所定の回(例えば512回)ずつ選択されるよう切り替えられ、また、A/D変換器25は、この切り替えのタイミングに同期してサンプリングを行う。つまり、レーダ波の1変調区間の間に、各受信チャンネルCH1〜CHn毎かつレーダ波の上り/下り各区間毎にサンプリングデータが蓄積されることになる。
【0041】
そして、レーダセンサ3の信号処理部26では、図3に示すように、予め設定された測定周期(本実施形態では100ms)毎に、3変調区間分のレーダ送信を実行し、その3つの変調区間のそれぞれで得られるサンプリングデータに基づいて、ターゲット情報の生成に必要な情報の収集や受信面の汚れ等の異常の判定を行う。なお、ターゲット情報の生成に関する処理(すなわち、反射波に基づいて中心軸の方向に対する障害物が位置する角度およびこの障害物までの距離を検出する処理)は、周知の処理と同様であるため、説明を省略する(障害物検出手段)。
【0042】
[軸ずれ補正処理]
本実施形態のレーダセンサ3においては、センサの中心軸の方向を補正する軸ずれ補正処理を実施する。図4は信号処理部26が実行する軸ずれ補正処理を示すフローチャートである。本処理は、障害物の位置(特に方位)を検出する際の基準となる、自車両の進行方向(前方)正面となる位置(中心軸の方向)を、障害物との相対移動ベクトルに基づき補正する処理である。
【0043】
なお、軸ずれ補正処理は、特許第3331882号公報、特許第3414267号公報等に記載されている処理と同様の処理としても実現することができるため、軸ずれ補正処理の説明は簡素なものとする。また、S120〜S140の処理は、本発明でいう偏向量検出手段に相当する。
【0044】
軸ずれ補正処理は、前述の測定周期毎に起動される処理であって、図4に示すように、まず、自車両の舵角を図示しないステアリングセンサから取得し、この舵角が直線走行していると認定することができる程度の基準舵角未満であるか否かを判定する(S110)。自車両の舵角が基準舵角以上であれば(S110:NO)、自車両が旋回中であり、正確な軸ずれ量が検出できない虞があるため、軸ずれ補正処理を終了する。
【0045】
また、自車両の舵角が基準舵角未満であれば(S110:YES)、自車両が概ね直線走行をしていることを示す。この場合には、反射波に基づく受信信号(複数の受信チャンネル毎の受信信号)を取得し、軸ずれ量θを演算する(S120:受信信号取得手段)。
【0046】
この軸ずれ量θは、障害物に対する自車両の相対移動ベクトルを検出し、この相対移動ベクトルとRAM等のメモリに記録された中心軸の方向とがなす角を演算することにより求められる。つまり、相対移動ベクトルと中心軸の方向とが一致すれば、図5(a)に示すように、軸ずれ量θ(センサ軸の偏向量)が0となり、相対移動ベクトルと中心軸の方向とが一致しなければ、図5(b)に示すように、0ではない軸ずれ量θが検出される。
【0047】
そして、軸ずれ量θから自車両の舵角θsを減算する補正を行い、この値をθshiftに設定する(S130)。なお、自車両の舵角θsが無視できる場合には、S130を省略してもよい。
【0048】
続いて、今回の処理において求めたθshiftを前回の処理において求めたθshiftを用いて補正する。例えば、各θshiftの値の加重平均をとり、この値を新たなθshiftに設定する(S140)。
【0049】
そして、θshiftをRAM等のメモリに履歴として記録し(S150:偏向量記録手段)、今回の処理において中心軸の方向を補正する際の補正値を演算する(S160:補正量演算手段)。この補正値としては、例えば、θshiftを1よりも大きな定数αで除した値を採用してもよいし、θshiftの値の大きさに応じた所定値を採用してもよい。つまり、この補正値は、θshiftの値を1回の処理で0にするのではなく、複数回に分けて0に近づけるような値に設定される。
【0050】
続いて、補正値の分だけ中心軸の方向を補正し、補正後の中心軸の方向をRAM等のメモリに記録し(S170:記録制御手段)、軸ずれ補正処理を終了する。なお、次回の軸ずれ補正処理の際には、補正後の中心軸の方向を利用して軸ずれ量θ等が演算されることになる。
【0051】
[異常検出処理]
次に、軸ずれ補正処理による結果を利用して、レーダセンサ3の異常を検出する処理について図6を用いて説明する。図6は信号処理部26が軸ずれ補正処理とは並行して実施する異常検出処理を示すフローチャートである。
【0052】
なお、異常検出処理において、S210〜S230の処理は本発明でいう第1異常判定手段に相当し、S340,S350の処理は本発明でいう第2異常判定手段に相当する。また、異常検出処理は、繰り返し実施される処理であるが、この繰り返し周期は、軸ずれ補正処理と同一の周期か、これよりも長い周期で実施されればよい。
【0053】
ここで、レーダセンサ3の異常とは、衝突による衝撃等によりセンサ軸自体がずれてしまった場合や、受信面の一部に汚れやひび割れ等が発生した場合等、一部のチャンネルによって反射波の受信が正常に行われない状態を示す。
【0054】
異常検出処理では、まず、RAM等のメモリに記録されたθshiftの履歴を抽出する(S210)。そして、この履歴をグラフとして表示したときの傾きに異常があるか否かを判定する(S220)。
【0055】
ここで、図7はθshiftの履歴を示すグラフである。レーダセンサ3の異常がない場合には、図7(a)に示すように、θshiftは時間の経過とともに0に近づく。上述の軸ずれ補正処理で、θshiftが時間の経過とともに0に近づくように中心軸の方向を補正しているからである。
【0056】
しかし、レーダセンサ3に異常がある場合には、図7(b)の太線に示すように、θshiftの絶対値が時間の経過とともに増加したり、図7(c)の太線に示すように、θshiftの絶対値が時間の経過とともに極端に(基準変化率を超えて)変化したりする。そこで、S220の処理では、予め想定されるθshiftの変化パターンを基準パターンとしてROM等のメモリに記録しておき、実際に検出されるθshiftの変化パターンが基準パターンから逸脱した場合(例えば、図7における細線で示す基準パターンから20%以上乖離した場合)に、傾きに異常があると判定する。
【0057】
傾きに異常があれば(S220:YES)、RAM等のメモリにおいて軸ずれフラグをON状態に設定し(S230:異常記録手段、保護手段)、S240の処理に移行する。なお、本実施形態におけるRAM等のメモリは、車両の電源(例えばイグニッションスイッチ)がOFF状態にされると、消去されるよう構成されているが、軸ずれフラグがON状態にされると、例えば不揮発性のメモリにバックアップがなされ、この履歴、フラグ、ダイアグ等の異常を特定するための情報が車両から消去されない状態となる。
【0058】
一方、傾きに異常がなければ(S220:NO)、直ちにS240の処理に移行する。続いて、S240の処理では、各チャンネルによって受信された受信電力の偏差(差分)を算出する(S240:偏差算出手段)。この処理では、複数の受信チャンネルから受信信号が得られる毎に、受信チャンネルの中で受信信号の電力値(受信電力)が最大となるものを最大チャンネルとして抽出し、受信チャンネル毎に最大チャンネルとの電力値の偏差を算出する。
そして、各受信電力の偏差に異常があるか否かを判定する(S250)。ここでは、各受信電力の偏差に基準値(例えば最大チャンネルの受信電力の20%:候補閾値)以上異なるものがあれば異常であると判定する。各受信電力の偏差に異常があれば(S250:YES)、軸ずれフラグがON状態であるか否かを判定する(S310)。
【0059】
軸ずれフラグがON状態であれば(S310:YES)、異常を出力するか否かの基準となる値である異常検出閾値を小さな値に変更し(S320:閾値変更手段)、S330の処理に移行する。S320の処理では、例えば、異常検出閾値を半分程度の値にするが、この閾値が極端に小さくならないように、下限値未満にはならないようにしてもよい。
【0060】
また、軸ずれフラグがOFF状態であれば(S310:NO)、直ちにS330の処理に移行し、RAM等のメモリにおいて異常を判定するための値である異常判定値をインクリメントし(S330:判定値カウント手段)、異常判定値と異常検出閾値とを比較する(S340)。異常判定値が異常検出閾値以上であれば(S340:YES)、異常ダイアグをON状態とし(S350:異常出力手段)、異常検出処理を終了する。また、異常判定値が異常検出閾値未満であれば(S340:NO)、直ちに異常検出処理を終了する。
【0061】
このように異常ダイアグがON状態となると、例えば不揮発性のメモリにバックアップがなされ、この履歴、フラグ、ダイアグ等の異常を特定するための情報が車両から消去されない状態にするとともに、この異常ダイアグ(異常がある旨)を車間制御ECU30に対して出力する。
【0062】
ところで、S250の処理において、各受信電力の偏差に異常がなければ(S250:NO)、各受信電力の偏差の最大値と上記基準値よりも小さな値に設定された解除値とを比較する(S410)。各受信電力の偏差の最大値が解除値未満であれば(S410:YES)、異常判定値をリセットし(S420)、異常ダイアグをOFF状態に設定し(S430)、異常検出処理を終了する。また、各受信電力の偏差の最大値が解除値以上であれば(S410:NO)、直ちに以上検出処理を終了する。
【0063】
なお、本実施形態において、一度ON状態となった軸ずれフラグは、上記の処理ではOFF状態とはされない。軸ずれフラグは、レーダセンサ3の修理やメンテナンスのときに別の処理が実施され、このとき、軸ずれの調整が完了した旨を示す調整完了フラグが信号処理部26のRAM等のメモリでON状態となると、OFF状態となる。
【0064】
[本実施形態による効果]
以上のように詳述した車両制御システム1を構成するレーダセンサ3において、信号処理部26は反射波に基づく受信信号を取得し、この受信信号から予め信号処理部26のRAM等のメモリに記録された中心軸の方向に対する障害物が位置する角度および障害物までの距離を繰り返し検出する。そして、信号処理部26は、障害物に対する自車両の相対移動ベクトルと中心軸の方向とがなす角である偏向量を繰り返し検出し、偏向量が0に近づくようにこの偏向量を複数回に分けて補正する際の補正量を繰り返し演算する。
【0065】
さらに信号処理部26は、中心軸の方向を補正量の分だけ補正して得られる新たな中心軸の方向を、障害物を検出する際に利用する中心軸の方向として信号処理部26のRAM等のメモリに記録させ、偏向量を履歴として信号処理部26のRAM等のメモリに記録させる。そして、信号処理部26は、偏向量の変化パターンが予め設定された基準パターンから逸脱する場合にレーダセンサ3に異常があると判定する。
【0066】
すなわち、本発明では、自車両の相対移動ベクトルと今回の処理開始までに求められた中心軸の方向とがなす角である偏向量を検出し、この偏向量が0に近づくように中心軸の方向を補正する。そして、この補正後の中心軸の方向を利用して、再度、偏向量を検出し、この偏向量がさらに0に近づくように中心軸の方向を補正する。このような処理を繰り返すことで、偏向量を段階的に0に収束させる。
【0067】
このような構成では、レーダセンサ3に異常がない場合には、偏向量が所定の繰り返し回数で0に近づくような偏向量の変化パターンが得られるものと予想される。一方で、レーダセンサ3に汚れ等の異常がある場合には、異常がない場合とは異なる偏向量の変化パターンが得られるものと考えられる。そこで、レーダセンサ3では、異常がない場合に得られると予想される変化パターンを基準パターンとして保持しておき、偏向量の変化パターンがこの基準パターンから逸脱する場合にレーダセンサ3に異常があると判定するようにしている。
【0068】
このようなレーダセンサ3によれば、偏向量が段階的に0に近づくように中心軸の方向を補正する構成において、偏向量を記録し、この変化パターンを基準パターンと比較するだけで、レーダセンサ3の異常を検出することができる。よって、簡素な処理でレーダセンサ3の異常を検出できる。
【0069】
また、レーダセンサ3において信号処理部26は、偏向量が、時間の経過とともに増加したときに、異常であると判定する。
このようなレーダセンサ3によれば、時間の経過とともに0に近づくはずの偏向量が増加したときに、異常があると判断することができる。
【0070】
また、レーダセンサ3において信号処理部26は、補正後偏向量または補正後偏向量に連動するパラメータが予め設定された基準変化率を超えて変化したときにも、異常であると判定する。
【0071】
このようなレーダセンサ3によれば、時間の経過とともに偏向量が0に近づいていたとしても、このときの変化率が基準変化率を超えて異常に大きな場合に、異常であると判断することができる。
【0072】
さらに、上記レーダセンサ3においては、偏向量の履歴は、このレーダセンサ3の電源がOFF状態にされると削除されるよう構成されており、信号処理部26は、異常であると判定された際に、異常がある旨を記録し、異常がある旨が記録された場合に、履歴が削除されないよう保護する。
【0073】
このようなレーダセンサ3によれば、異常が発生した場合に履歴が削除されないようにするので、異常が発生したときの原因を履歴によって解明しやすくすることができる。
また、上記レーダセンサ3において信号処理部26は、反射波を互いに異なるアンテナ素子で受信する複数の受信チャンネルを有するレーダセンサ3から複数の受信チャンネル毎の受信信号を取得し、複数の受信チャンネルから受信信号が得られる毎に、受信チャンネルの中で受信信号の電力値が最大となるものを最大チャンネルとして抽出し、受信チャンネル毎に最大チャンネルとの電力値の偏差を算出する。そして、信号処理部26は、受信チャンネルのうち、信号処理部26にて算出される偏差が予め設定された候補閾値以上となるものがあれば、異常判定値をインクリメントし、異常判定値が予め設定された異常判定閾値以上になった場合に、レーダセンサ3に異常があると判定する。
【0074】
このようなレーダセンサ3によれば、受信電力の偏差が大きな状態が継続的に発生した場合にも、異常であると判定することができる。
さらに、上記レーダセンサ3において信号処理部26は、偏向量の変化パターンが基準パターンから逸脱することによる異常があると判定された場合、異常判定閾値をより小さな値に変更する。
【0075】
このようなレーダセンサ3によれば、偏向量の変化パターンが基準パターンから逸脱することによる異常が検出された場合に、受信電力の偏差が大きいことによる異常を判定するまでの時間を短縮することができる。
【0076】
また、上記レーダセンサ3において信号処理部26は、受信電力の偏差が大きいことによる異常があると判定された場合、異常がある旨を出力する。
このようなレーダセンサ3によれば、信号処理部26による異常がある旨を出力することができる。このとき、偏向量の変化パターンが基準パターンから逸脱することによる異常があった場合、履歴を参照することで異常の原因を特定し易くすることができる。
【0077】
さらに、上記レーダセンサ3において信号処理部26は、最新の偏向量に過去において検出された偏向量を加味した偏向量を繰り返し検出する。
このようなレーダセンサ3によれば、過去において検出された偏向量を加味して偏向量を検出するので、ノイズや振動等の影響で一時的に偏向量が大きく変化した場合に、異常であると誤検出してしまうことを防止することができる。
【0078】
[その他の実施形態]
本発明の実施の形態は、上記の実施形態に何ら限定されることはなく、本発明の技術的範囲に属する限り種々の形態を採りうる。
【0079】
例えば、上記実施形態において、旋回中には軸ずれ補正処理を終了するようにしたが、正確に軸ずれ量を検出できる場合には軸ずれを補正する処理を継続してもよい。また、本実施形態ではミリ波レーダに対して本発明を適用したが、レーザレーダやソナー等の距離検出装置の異常を検出する装置にも本発明を適用することができる場合がある。
【0080】
また、上記実施形態においては、偏向量自体の変化パターンに基づいて異常があるか否かを判定したが、偏向量自体でなく、偏向量に連動するパラメータを利用してもよい。
【符号の説明】
【0081】
1…車両制御システム、3…レーダセンサ、3a…筐体、3b…アンテナ基板、3c…レドーム、10…発振器、12…増幅器、14…分配器、16…送信アンテナ、20…受信アンテナ部、21…受信スイッチ、22…増幅器、23…ミキサ、24…フィルタ、25…A/D変換器、26…信号処理部、30…車間制御ECU、32…エンジンECU、34…ブレーキECU。
【特許請求の範囲】
【請求項1】
車両に搭載され、車幅方向の所定角度範囲内に所定の送信波を照射し、その反射波に基づいて障害物を検出する障害物検出装置の異常を検出する異常検出装置であって、
前記反射波に基づく受信信号を取得する受信信号取得手段と、
該受信信号から予め中心軸記録部に記録された中心軸の方向に対する障害物が位置する角度および該障害物までの距離を繰り返し検出する障害物検出手段と、
前記障害物に対する自車両の相対移動ベクトルと前記中心軸の方向とがなす角である偏向量を繰り返し検出する偏向量検出手段と、
前記偏向量が0に近づくように該偏向量を複数回に分けて補正する際の補正量を繰り返し演算する補正量演算手段と、
前記中心軸の方向を前記補正量の分だけ補正して得られる新たな中心軸の方向を前記障害物検出手段が障害物を検出する際に利用する中心軸の方向として前記中心軸記録部に記録させる記録制御手段と、
前記偏向量または前記偏向量に連動するパラメータを履歴として履歴記録部に記録させる偏向量記録手段と、
前記偏向量または前記偏向量に連動するパラメータの変化パターンが予め設定された基準パターンから逸脱する場合に前記障害物検出装置に異常があると判定する第1異常判定手段と、
を備えたことを特徴とする異常検出装置。
【請求項2】
請求項1に記載の異常検出装置において、
前記第1異常判定手段は、前記偏向量または前記偏向量に連動するパラメータが、時間の経過とともに増加したときに、異常であると判定すること
を特徴とする異常検出装置。
【請求項3】
請求項1または請求項2に記載の異常検出装置において、
前記第1異常判定手段は、前記補正後偏向量または前記補正後偏向量に連動するパラメータが予め設定された基準変化率を超えて変化したときに、異常であると判定すること
を特徴とする異常検出装置。
【請求項4】
請求項1〜請求項3の何れか1項に記載の異常検出装置において、
前記履歴は当該異常検出装置の電源がOFF状態にされると削除されるよう構成されており、
前記第1異常判定手段によって異常であると判定された際に、異常がある旨を記録する異常記録手段と、
前記異常がある旨が記録された場合に、前記履歴および前記異常がある旨が削除されないよう保護する保護手段と、
を備えたことを特徴とする異常検出装置。
【請求項5】
請求項1〜請求項4の何れか1項に記載の異常検出装置において、
前記受信信号取得手段は、前記反射波を互いに異なるアンテナ素子で受信する複数の受信チャンネルを有する障害物検出装置から前記複数の受信チャンネル毎の受信信号を取得し、
当該異常検出装置は、
前記複数の受信チャンネルから受信信号が得られる毎に、前記受信チャンネルの中で前記受信信号の電力値が最大となるものを最大チャンネルとして抽出し、前記受信チャンネル毎に前記最大チャンネルとの電力値の偏差を算出する偏差算出手段と、
前記受信チャンネルのうち、前記偏差算出手段にて算出される偏差が予め設定された候補閾値以上となるものがあれば、異常判定値をインクリメントする判定値カウント手段と、
前記異常判定値が予め設定された異常判定閾値以上になった場合に、前記障害物検出装置に異常があると判定する第2異常判定手段と、
を備えたこと特徴とする異常検出装置。
【請求項6】
請求項5に記載の異常検出装置において、
前記第1異常判定手段によって異常があると判定された場合、前記異常判定閾値をより小さな値に変更する閾値変更手段、を備えたこと
を特徴とする異常検出装置。
【請求項7】
請求項5または請求項6に記載の異常検出装置において、
前記第2異常判定手段によって異常があると判定された場合、異常がある旨を出力する異常出力手段、を備えたこと
を特徴とする異常検出装置。
【請求項8】
請求項1〜請求項7の何れか1項に記載の異常検出装置において、
前記偏向量検出手段は、最新の偏向量に過去において検出された偏向量を加味した偏向量を繰り返し検出すること
を特徴とする異常検出装置。
【請求項9】
コンピュータを、請求項1〜請求項8の何れか1項に記載の異常検出装置を構成する各手段として機能させるための異常検出プログラム。
【請求項1】
車両に搭載され、車幅方向の所定角度範囲内に所定の送信波を照射し、その反射波に基づいて障害物を検出する障害物検出装置の異常を検出する異常検出装置であって、
前記反射波に基づく受信信号を取得する受信信号取得手段と、
該受信信号から予め中心軸記録部に記録された中心軸の方向に対する障害物が位置する角度および該障害物までの距離を繰り返し検出する障害物検出手段と、
前記障害物に対する自車両の相対移動ベクトルと前記中心軸の方向とがなす角である偏向量を繰り返し検出する偏向量検出手段と、
前記偏向量が0に近づくように該偏向量を複数回に分けて補正する際の補正量を繰り返し演算する補正量演算手段と、
前記中心軸の方向を前記補正量の分だけ補正して得られる新たな中心軸の方向を前記障害物検出手段が障害物を検出する際に利用する中心軸の方向として前記中心軸記録部に記録させる記録制御手段と、
前記偏向量または前記偏向量に連動するパラメータを履歴として履歴記録部に記録させる偏向量記録手段と、
前記偏向量または前記偏向量に連動するパラメータの変化パターンが予め設定された基準パターンから逸脱する場合に前記障害物検出装置に異常があると判定する第1異常判定手段と、
を備えたことを特徴とする異常検出装置。
【請求項2】
請求項1に記載の異常検出装置において、
前記第1異常判定手段は、前記偏向量または前記偏向量に連動するパラメータが、時間の経過とともに増加したときに、異常であると判定すること
を特徴とする異常検出装置。
【請求項3】
請求項1または請求項2に記載の異常検出装置において、
前記第1異常判定手段は、前記補正後偏向量または前記補正後偏向量に連動するパラメータが予め設定された基準変化率を超えて変化したときに、異常であると判定すること
を特徴とする異常検出装置。
【請求項4】
請求項1〜請求項3の何れか1項に記載の異常検出装置において、
前記履歴は当該異常検出装置の電源がOFF状態にされると削除されるよう構成されており、
前記第1異常判定手段によって異常であると判定された際に、異常がある旨を記録する異常記録手段と、
前記異常がある旨が記録された場合に、前記履歴および前記異常がある旨が削除されないよう保護する保護手段と、
を備えたことを特徴とする異常検出装置。
【請求項5】
請求項1〜請求項4の何れか1項に記載の異常検出装置において、
前記受信信号取得手段は、前記反射波を互いに異なるアンテナ素子で受信する複数の受信チャンネルを有する障害物検出装置から前記複数の受信チャンネル毎の受信信号を取得し、
当該異常検出装置は、
前記複数の受信チャンネルから受信信号が得られる毎に、前記受信チャンネルの中で前記受信信号の電力値が最大となるものを最大チャンネルとして抽出し、前記受信チャンネル毎に前記最大チャンネルとの電力値の偏差を算出する偏差算出手段と、
前記受信チャンネルのうち、前記偏差算出手段にて算出される偏差が予め設定された候補閾値以上となるものがあれば、異常判定値をインクリメントする判定値カウント手段と、
前記異常判定値が予め設定された異常判定閾値以上になった場合に、前記障害物検出装置に異常があると判定する第2異常判定手段と、
を備えたこと特徴とする異常検出装置。
【請求項6】
請求項5に記載の異常検出装置において、
前記第1異常判定手段によって異常があると判定された場合、前記異常判定閾値をより小さな値に変更する閾値変更手段、を備えたこと
を特徴とする異常検出装置。
【請求項7】
請求項5または請求項6に記載の異常検出装置において、
前記第2異常判定手段によって異常があると判定された場合、異常がある旨を出力する異常出力手段、を備えたこと
を特徴とする異常検出装置。
【請求項8】
請求項1〜請求項7の何れか1項に記載の異常検出装置において、
前記偏向量検出手段は、最新の偏向量に過去において検出された偏向量を加味した偏向量を繰り返し検出すること
を特徴とする異常検出装置。
【請求項9】
コンピュータを、請求項1〜請求項8の何れか1項に記載の異常検出装置を構成する各手段として機能させるための異常検出プログラム。
【図1】


【図3】
【図4】
【図5】
【図6】
【図2】
【図7】
【図3】
【図4】
【図5】
【図6】
【図2】
【図7】
【公開番号】特開2012−98117(P2012−98117A)
【公開日】平成24年5月24日(2012.5.24)
【国際特許分類】
【出願番号】特願2010−245302(P2010−245302)
【出願日】平成22年11月1日(2010.11.1)
【出願人】(000004260)株式会社デンソー (27,639)
【Fターム(参考)】
【公開日】平成24年5月24日(2012.5.24)
【国際特許分類】
【出願日】平成22年11月1日(2010.11.1)
【出願人】(000004260)株式会社デンソー (27,639)
【Fターム(参考)】
[ Back to top ]