
異常診断装置及び異常診断方法
【課題】回転速度センサの出力信号に重畳するノイズの影響を排除して、正確に回転速度を検出し、回転装置の異常を高い精度で診断する。
【解決手段】回転装置の回転に伴って回転速度センサから出力される回転信号を波形整形部161でパルス波に整形し、パルス周期測定部162によってN個のパルス周期を測定する。パルス周期判定部163は、測定したN個のパルス周期のうち、M個のパルス周期が所定の範囲にある場合に、M個のパルス周期に基づいて正しい周期を算出し、回転速度算出部164によって回転速度を算出する。この回転速度と振動センサによって検出された振動に基づいて、回転装置の異常を診断する。
【解決手段】回転装置の回転に伴って回転速度センサから出力される回転信号を波形整形部161でパルス波に整形し、パルス周期測定部162によってN個のパルス周期を測定する。パルス周期判定部163は、測定したN個のパルス周期のうち、M個のパルス周期が所定の範囲にある場合に、M個のパルス周期に基づいて正しい周期を算出し、回転速度算出部164によって回転速度を算出する。この回転速度と振動センサによって検出された振動に基づいて、回転装置の異常を診断する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、鉄道車両や自動車、或いは機械設備等に用いられる回転装置において、異常の有無を診断する異常診断装置及び異常診断方法に関する。
【背景技術】
【0002】
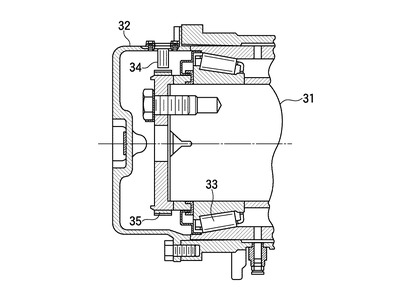
従来、鉄道車両や自動車等の回転部分に使用される転がり軸受等の回転装置では、例えば、図11に示す構成の異常診断装置を用いて異常の有無を診断している(例えば、特許文献1参照)。この回転装置は、車軸等の回転軸31とハウジング32との間に配置される円錐ころ軸受33を備えている。
【0003】
ハウジング32の外表面には、内部に連通する取付孔を介して、センサモジュール34が固定されている。このセンサモジュール34は、回転軸31の回転速度を検出する回転速度センサと、円錐ころ軸受33の振動及び温度を検出する振動センサと温度センサとから構成されている。
【0004】
センサモジュール34は、回転軸31に取り付けられた歯車35と対向しており、回転速度センサは、回転軸31の回転速度に比例した周波数のパルス信号を出力して、パルス信号の周期を測定することにより回転軸31の回転速度を検出する。そして、各センサは、検出された速度、温度、振動ごとに複数の円錐ころ軸受33の運転状態を監視している。
【0005】
一方、振動センサから得られた振動信号と、回転速度センサから得られた回転速度に基づいて、軸受の傷や剥離等の異常の有無を診断することが知られている(例えば、特許文献2参照)。特許文献2に記載の異常診断装置では、軸受の傷や剥離等の振動の特定の周波数成分を分析して異常を判定するため、特許文献1に記載のものに比べて早期に異常検出を行うことが可能である。
【0006】
【特許文献1】特表2001−500597号公報
【特許文献2】特開2002−295464号公報
【発明の開示】
【発明が解決しようとする課題】
【0007】
しかしながら、回転装置が劣悪な環境で使用されるような場合には、回転速度センサの出力信号にノイズが重畳してしまう。このため回転速度を正確に検出することができないことがあり、異常診断の精度が低いという問題点があった。
【0008】
本発明は、前述の事情に鑑みてなされたものであり、その目的は、回転速度センサの出力信号にノイズが重畳した場合であっても、ノイズの影響を排除して正確に回転速度を検出することを可能とし、回転装置の異常を高い精度で診断することのできる異常診断装置及び異常診断方法を提供することにある。
【課題を解決するための手段】
【0009】
前述した目的を達成するために、本発明に係る異常診断装置及び異常診断方法は、下記の構成を有する。
【0010】
(1) 検出した振動及び回転速度に基づいて、回転装置の異常を診断する異常診断装置であって、
回転装置の回転に伴って回転信号を出力する回転速度センサと、
回転信号からN個の周期データを測定し、測定したN個の周期データのうち、M個の周期データが所定の範囲にある場合に、M個の周期データに基づいて回転速度を算出する回転分析部と、
を有することを特徴とする異常診断装置。
【0011】
(2) 検出した振動及び回転速度に基づいて、回転装置の異常を診断する異常診断装置であって、
回転装置の回転に伴って回転信号を出力する回転速度センサと、
回転信号をA/D変換し、変換したディジタル信号についてフーリエ変換による周波数分析を行うことで回転速度を算出する回転分析部と、
を有することを特徴とする異常診断装置。
【0012】
(3) 回転装置は、鉄道車両用、又は自動車用の回転装置である(1)又は(2)に記載の異常診断装置。
【0013】
(4) 検出した振動及び回転速度に基づいて、回転装置の異常を診断する異常診断方法であって、
回転装置の回転に伴う回転信号を出力する工程と、
回転信号からN個の周期データを測定する工程と、
測定したN個の周期データのうち、M個の周期データが所定の範囲にある場合に、M個の周期データに基づいて回転速度を算出する工程と、
を有することを特徴とする異常診断方法。
【0014】
(5) 検出した振動及び回転速度に基づいて、回転装置の異常を診断する異常診断方法であって、
回転装置の回転に伴う回転信号を出力する工程と、
回転信号をA/D変換する工程と、
変換したディジタル信号についてフーリエ変換による周波数分析を行うことで回転速度を算出する工程と、
を有することを特徴とする異常診断方法。
【0015】
(6) 回転装置は、鉄道車両用、又は自動車用の回転装置である(4)又は(5)に記載の異常診断方法。
【発明の効果】
【0016】
本発明によれば、回転速度センサの出力信号にノイズが重畳した場合であっても、ノイズの影響を排除して正確に回転速度を検出することを可能とし、回転装置の異常を高い精度で診断することのできる異常診断装置及び異常診断方法を提供できる。
【発明を実施するための最良の形態】
【0017】
以下、本発明の各実施形態に係る異常診断装置及び異常診断方法について、図面を参照して詳細に説明する。
【0018】
(第1実施形態)
まず、本発明の第1実施形態に係る異常診断装置の全体的な構成について説明する。図1は、第1実施形態に係る異常診断装置の概略構成を示すブロック図である。
【0019】
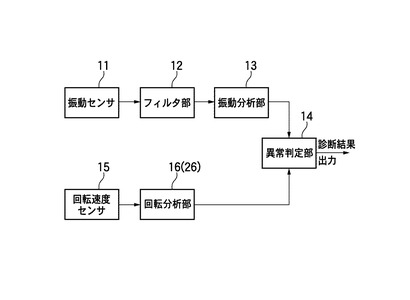
図1に示すように、本実施形態の異常診断装置は、振動センサ11、フィルタ部12、振動分析部13、異常判定部14、回転速度センサ15及び回転分析部16を備える構成である。
【0020】
振動センサ11は、圧電素子や加速度センサ等の振動測定用素子からなり、軸受の傷や剥離、歯車の欠損、車輪のフラット磨耗等、回転装置の損傷により発生した振動を検出して振動信号を出力する。なお、振動センサ11は、加速度、速度或いは変位型等、振動を電気信号化できるものであればよく、ノイズが多いような機械装置に取り付ける際には、絶縁型を使用する方がノイズの影響を受けることがないので好ましい。また、振動センサ11は、後述する回転速度センサ15や温度センサ等と共に単一の筐体に収納される構成であってもよい。
【0021】
フィルタ部12は、振動センサ11から出力される振動信号に含まれるノイズ等の不要な高周波成分を除去する。
【0022】
振動分析部13は、フィルタ部12から出力される振動信号を基に、回転装置に発生する振動の周波数分析を行う。具体的には、フィルタ部12から出力される振動信号をA/D変換器によりディジタル信号に変換し、FFT(Fast Fourier Transformation:高速フーリエ変換)のアルゴリズムに基づいて振動の周波数スペクトルを算出する。なお、A/D変換は、フィルタ部12による処理を行う前に行われてもよい。
【0023】
異常判定部14は、振動分析部13による振動の周波数スペクトルと、後述する回転分析部16によって算出された回転速度情報に基づいて算出される基準値とを比較して、回転装置の異常の有無を判定する。具体的には、周波数スペクトルから所定の基準値より大きいスペクトル強度のピークを抽出し、ピーク間の周波数と、算出した回転速度における部材の損傷に起因する周波数成分とを比較照合することにより、異常の有無及び異常部位を判定する。
【0024】
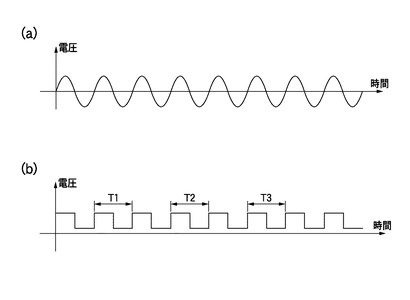
回転速度センサ15は、例えば、図11に示したように、回転装置の回転軸に取り付けられた被検出体である歯車や多極磁石等のエンコーダに近接して配置され、回転軸の回転に伴って発生する電圧信号、例えば図3(a)に示すような、正弦波からなる回転信号を出力する。
【0025】
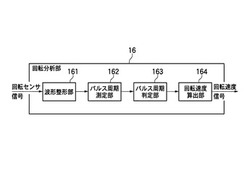
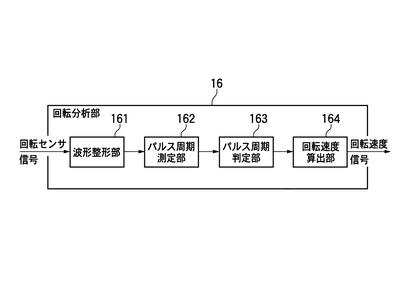
回転分析部16は、回転速度センサ15から出力される回転信号から回転装置の回転速度を算出する。図2に示すように、回転分析部16は、波形整形部161、パルス周期測定部162、パルス周期判定部163及び回転速度算出部164を備える構成である。
【0026】
波形整形部161は、コンパレータ等を用いて回転速度センサ15から出力される正弦波からなる回転信号をパルス信号に整形する。図3(b)は、図3(a)に示した回転速度センサ15の出力を波形整形部161で整形した後のパルス信号の波形を示すものである。
【0027】
パルス周期測定部162は、波形整形部161によって整形された回転信号のパルス列について、任意のN個の周期データであるパルス周期を測定する。なお、Nは、3以上の任意の整数である。図3(b)は、一つおきに3個のパルス周期T1、T2、T3を測定した例を示している。パルス周期の測定は、マイクロコンピュータに内蔵されたタイマ・カウンタ等によって容易に測定することができる。
【0028】
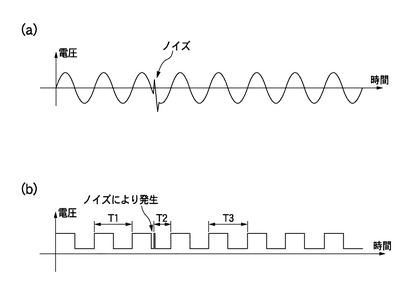
ところで、回転速度センサ15の出力信号には、回転装置の使用環境が劣悪な場合等において、ノイズが重畳することがある。図4(a)は、回転速度センサ15から出力された正弦波からなる回転信号の一部にノイズが重畳した例を示すものである。このように、ノイズが重畳した回転信号を波形整形部161によって波形整形すると、ノイズも併せてパルスに整形されてしまい、このため誤ったパルス周期が測定される。図4(b)は、測定した3個のパルス周期T1〜T3の中に、ノイズの影響を受けて極端に短いパルス周期T2を含んだ場合の例を示すものである。
【0029】
パルス周期判定部163は、パルス周期測定部162によって測定したN個のパルス周期のうち、任意のM個のパルス周期(周期データ)が所定の範囲にある場合に、これを正しいパルス周期と判定し、M個のパルス周期に基づいて所定の演算を行って正しいパルス周期Tを算出する。
【0030】
回転速度算出部164は、パルス周期判定部163によって算出したパルス周期Tから、マイクロコンピュータの演算により回転速度を算出する。このようにして算出された回転速度情報は、図1における異常判定部14に送られ、前述したように回転装置の異常判定に供される。
【0031】
次に、このように構成される回転分析部16の動作について図3及び図4に示す回転信号を基に説明する。図5は、回転分析部16の処理手順を説明するためのタイムチャートである。
【0032】
まず、回転装置における回転軸の回転に伴って回転速度センサ15から出力された、例えば、図3(a)に示すような正弦波からなる回転信号を入力し(ステップS101)、波形整形部161で増幅、整形して、図3(b)に示すようなパルス列を得る(ステップS102)。なお、ステップS101及びS102は、電子回路によるハードウェア処理により行われる。
【0033】
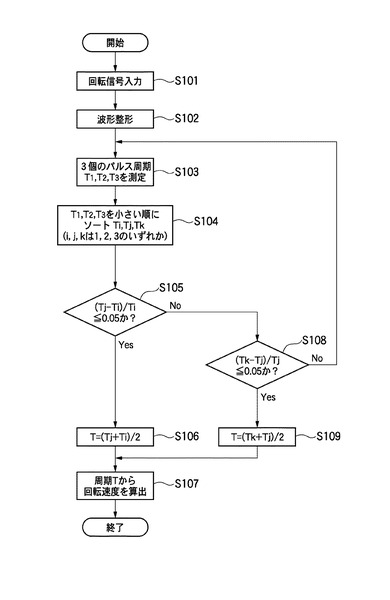
次いで、パルス周期測定部162により、パルス列から任意のパルス周期T1,T2,T3を測定し(ステップS103)、小さい順にソートする(ステップS104)。ここで、測定したパルス周期T1,T2,T3をパルス周期の小さい順にTi,Tj,Tkとする。
【0034】
パルス周期判定部163により、Tiに対するTjとTiの差が所定の基準値、例えば5%以下であるか否かを判定する(ステップS105)。なお、この基準値は、回転装置が適用される鉄道車両や自動車等における回転部分の違いや、回転速度センサ15の稼働環境及び稼働条件によって適宜設定するものであり、通常は1〜10%の範囲で設定する。
【0035】
ステップS105の処理手順で、Tiに対するTjとTiの差が所定の基準値以下であると判定された場合は、周期TiとTjの平均値をとることによって正しい周期Tを算出する(ステップS106)。
【0036】
ステップS107では、正しい周期Tからマイクロコンピュータの演算により回転速度を算出して処理を終了する。このようにして算出した回転速度情報は、図1の異常判定部14に送られて異常判定のための判定条件として使用される。
【0037】
一方、ステップS105の処理手順で、Tjに対するTjとTiの差が所定の基準値を超えると判定された場合は、ステップS108の手順に進み、パルス周期判定部163により、Tjに対するTkとTjの差が所定の基準値以下であるか否かを判定する。
【0038】
ステップS108の処理手順で、Tjに対するTkとTjの差が所定の基準値以下であると判定された場合は、周期TjとTkの平均値をとることによって正しい周期Tを算出し(ステップS109)、ステップS107にて回転速度を算出する。
【0039】
一方、ステップS105の処理手順で、Tjに対するTkとTjの差が所定の基準値を超えると判定された場合は、所定のばらつき範囲にあるパルス周期が測定されなかったことを意味するので、ステップS103の手順に戻って、波形整形部161から出力されるパルス列に対して新たなN個のパルス周期を測定する。
【0040】
このため、図3に示すような3個のパルス周期を測定する場合には、T1とT2の2つのパルス周期の平均値から正常な周期Tが求められ、正しい回転速度を得ることができ、図4に示すような3個のパルス周期を測定する場合には、T1とT3の2つのパルス周期の平均値から正常な周期Tが求められ、正しい回転速度を得ることができる。また、T1,T2,T3の内の2つのパルス周期にノイズが重畳した場合には、再度3個のパルス周期を測定するので、正しい回転速度を得ることができる。
【0041】
以上説明したように、本発明に係る第1実施形態の異常診断装置によれば、振動及び回転速度に基づいて回転装置の異常を診断する際に、回転速度センサ15により検出した回転信号の波形を整形したパルス列からN個(3個)のパルス周期を測定し、2つのパルス周期の差が所定の基準値以下であるパルス周期がM個(2個)ある場合に、それらの算術平均値から正しいパルス周期を求めて回転速度を算出する。
【0042】
これにより、回転速度センサ15から出力される回転信号にノイズが重畳した場合であっても、その影響を効果的に排除して正確に回転速度を検出することが可能となり、回転装置の異常を高い精度で診断することができる。このような異常診断装置は、回転速度が急激に変化する軸受装置等の場合には適用が困難であるが、鉄道車両の車軸や自動車の車軸の回転速度等のように急激に変化することがない車軸用の軸受装置には非常に有効である。
【0043】
なお、N個のパルス周期は、図3,4のように1周期おきに測定されてもよく、回転速度センサの測定対象や使用目的等により、連続した周期を使用することも可能であるし、離散した周期を使用することも可能である。
【0044】
また、上記実施形態では、ステップS106,S109において2つのパルス周期の平均値を正しい周期として回転速度を算出しているが、2つのパルス周期のいずれかを正しい周期として算出してもよい。
【0045】
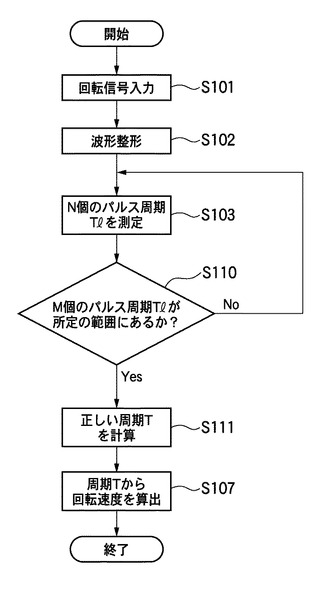
なお、本実施形態では、説明を分かりやすくするため、3個のパルス周期で説明したが、それ以上であってもよく、N個の周期を測定する場合にも、M個の平均値から回転速度を算出してもよい。即ち、図6に示すように、ステップS103にて、N個のパルス周期Tl(l=1,・・・,N)を測定した後、M個のパルス周期Tlが所定の範囲にあるかどうかを判断し(ステップS110)、M個のパルス周期が所定の範囲にある場合に、正しい周期Tを計算し(ステップS111)、ステップS107にて、この周期Tから回転速度を算出するものであればよい。従って、ステップS111における計算手法として、2つのパルス周期の差が所定の基準値以下であるM個のパルス周期について平均値を求め、正しいパルス周期としたが、これに限るものではなく、例えばM個のパルス周期分布の中央値や、出現頻度の最も多いものを用いてもよく、さらには他の演算方法により算出してもよい。また、ステップS110における判断手法も、上記実施形態のものに限定されるものでない。
【0046】
(第2実施形態)
本発明の第2実施形態に係る異常診断装置の全体的な構成は、図1に示した第1実施形態の異常診断装置と同じであり、回転分析部16の内部構成のみが異なる。このため、第1実施形態と同等部分については、同一符号を付して説明を省略或いは簡略化する。
【0047】
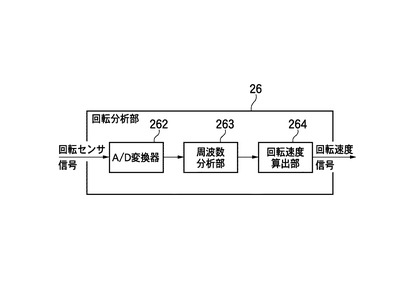
図1に示す本実施形態の回転分析部26は、第1実施形態における回転分析部16と同様に、回転速度センサ15から出力される回転信号から回転軸の回転速度を算出する。以下、回転分析部26の構成及び動作について、図面を用いて詳細に説明する。図7は、回転分析部26の概略構成を示すブロック図である。
【0048】
図7に示すように、回転分析部26は、A/D変換器262、周波数分析部263、回転速度算出部264を有する構成である。
【0049】
A/D変換器262は、アナログの回転信号をA/D変換し、ディジタル信号に変換する。
【0050】
周波数分析部263は、ディジタル化された回転信号をFFTアルゴリズムに基づいて演算して周波数スペクトルを算出し、周波数スペクトル強度の最大ピークを示す周波数成分から回転信号の基本周波数を求める。
【0051】
回転速度算出部264は、周波数分析部263によって求められたパルス列の基本周波数に基づいて、マイクロコンピュータの演算により回転装置の回転速度を算出する。
【0052】
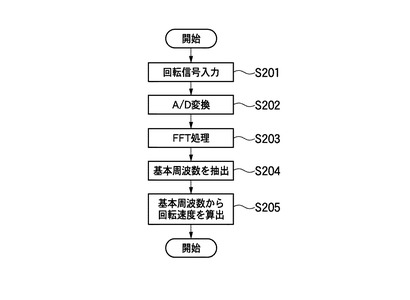
次に、このように構成された本実施形態の回転分析部26の動作について、図8〜図10を用いて説明する。図8は、回転分析部26の処理手順を説明するためのタイムチャートである。
【0053】
まず、回転装置における回転軸の回転に伴って回転速度センサ15から出力されたアナログ信号である回転信号を入力し(ステップS201)、A/D変換器262によりディジタル信号に変換する(ステップS202)。
【0054】
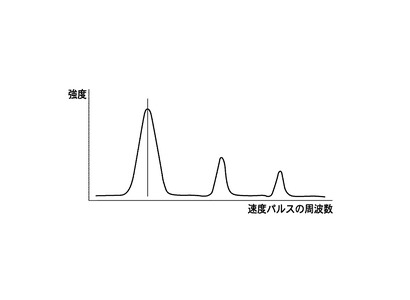
次いで、周波数分析部263でFFTアルゴリズムに基づく周波数分析を行い(ステップS203)、図9に示すような周波数スペクトルを算出する。この周波数スペクトルにはいくつかのピークが現れるが、その中の最大のピーク強度を示す基本周波数が回転パルス信号の周波数に相当する。従って、これを抽出して回転信号の正しい周期Tを算出する(ステップS204)。
【0055】
ステップS205では、算出された周期からマイクロコンピュータの演算により回転速度を算出する。このようにして求められた回転速度信号は、図1に示す異常判定部14に送られ、回転装置の異常判定に供される。
【0056】
このように、本実施形態の回転分析部26は、回転速度センサ15から出力される回転信号をA/D変換してFFT処理し、周波数スペクトルを算出する。そして、周波数スペクトルの最大ピーク強度を示す周波数成分から回転信号の周期を算出するので、回転速度センサ15から出力される回転信号に重畳したチャタリング等のノイズは、FFTを行うことで高い周波数域に遷移させることができ、回転信号の周期算出に際して影響を与えることがない。
【0057】
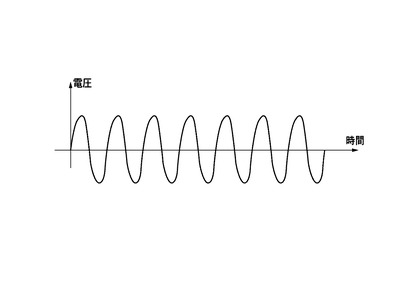
なお、A/D変換器262に入力する回転信号は必ずしも正弦波だけでなく、矩形波などの回転速度に比例した周波数成分を持つ波形であればよい。正弦波を直接A/D変換することによって、第1実施形態と比べ、波形整形部161が不要となるので、回路構成を簡略化することができる。
【0058】
また、回転分析部26におけるFFTアルゴリズムの実行は、CPUによるソフトウェア処理によって行われる。また、A/D変換は、マイコンの空いているAD入力ポートを利用することにより実現できる。
【0059】
以上説明したように、このような本発明の第2実施形態に係る異常診断装置によれば、振動及び回転速度に基づいて回転装置の異常を診断する際に、回転速度センサ15により検出した回転信号をA/D変換してFFT処理し、算出した周波数スペクトルの最大ピーク強度を示す周波数から回転信号の周期を求め、回転速度を算出する。これにより、回転速度センサ15の回転信号に含まれるノイズの影響を排除して、回転装置の回転速度を正確に検出することが可能となり、回転装置の異常を高い精度で診断することができる。
【0060】
なお、本発明は、前述した各実施形態に限定されるものでなく、適宜、変形、改良等が可能である。
【図面の簡単な説明】
【0061】
【図1】本発明の第1及び第2実施形態に係る異常診断装置の概略構成を示すブロック図である。
【図2】本発明の第1実施形態に係る異常診断装置の回転分析部の構成を示すブロック図である。
【図3】(a)は、第1実施形態の異常診断装置における回転速度センサの回転信号の波形を示す図であり、(b)は、回転速度センサの回転信号を整形した後の波形を示す図である。
【図4】(a)は、第1実施形態の異常診断装置における回転速度センサにノイズが重畳した回転信号の波形を示す図であり、(b)は、回転速度センサのノイズが重畳した回転信号を整形した後の波形を示す図である。
【図5】本発明の第1実施形態に係る異常診断装置の回転分析部の処理手順を説明するためのタイムチャートである。
【図6】図5の回転分析部の処理手順をより一般化して説明したタイムチャートである。
【図7】本発明の第2実施形態に係る異常診断装置の回転分析部の構成を示すブロック図である。
【図8】本発明の第2実施形態に係る異常診断装置の回転分析部の処理手順を説明するためのタイムチャートである。
【図9】第2実施形態の異常診断装置における回転速度センサの回転パルス信号の周波数スペクトルを示す図である。
【図10】第2実施形態の異常診断装置における回転速度センサの正弦波からなる回転信号を示す図である。
【図11】従来の異常診断装置の構成を示す図である。
【符号の説明】
【0062】
11 振動センサ
12 フィルタ部
13 振動分析部
14 異常判定部
15 回転速度センサ
16、26 回転分析部
161 波形整形部
162 パルス周期測定部
163 パルス周期判定部
164、264 回転速度算出部
262 A/D変換器
263 周波数分析部
【技術分野】
【0001】
本発明は、鉄道車両や自動車、或いは機械設備等に用いられる回転装置において、異常の有無を診断する異常診断装置及び異常診断方法に関する。
【背景技術】
【0002】
従来、鉄道車両や自動車等の回転部分に使用される転がり軸受等の回転装置では、例えば、図11に示す構成の異常診断装置を用いて異常の有無を診断している(例えば、特許文献1参照)。この回転装置は、車軸等の回転軸31とハウジング32との間に配置される円錐ころ軸受33を備えている。
【0003】
ハウジング32の外表面には、内部に連通する取付孔を介して、センサモジュール34が固定されている。このセンサモジュール34は、回転軸31の回転速度を検出する回転速度センサと、円錐ころ軸受33の振動及び温度を検出する振動センサと温度センサとから構成されている。
【0004】
センサモジュール34は、回転軸31に取り付けられた歯車35と対向しており、回転速度センサは、回転軸31の回転速度に比例した周波数のパルス信号を出力して、パルス信号の周期を測定することにより回転軸31の回転速度を検出する。そして、各センサは、検出された速度、温度、振動ごとに複数の円錐ころ軸受33の運転状態を監視している。
【0005】
一方、振動センサから得られた振動信号と、回転速度センサから得られた回転速度に基づいて、軸受の傷や剥離等の異常の有無を診断することが知られている(例えば、特許文献2参照)。特許文献2に記載の異常診断装置では、軸受の傷や剥離等の振動の特定の周波数成分を分析して異常を判定するため、特許文献1に記載のものに比べて早期に異常検出を行うことが可能である。
【0006】
【特許文献1】特表2001−500597号公報
【特許文献2】特開2002−295464号公報
【発明の開示】
【発明が解決しようとする課題】
【0007】
しかしながら、回転装置が劣悪な環境で使用されるような場合には、回転速度センサの出力信号にノイズが重畳してしまう。このため回転速度を正確に検出することができないことがあり、異常診断の精度が低いという問題点があった。
【0008】
本発明は、前述の事情に鑑みてなされたものであり、その目的は、回転速度センサの出力信号にノイズが重畳した場合であっても、ノイズの影響を排除して正確に回転速度を検出することを可能とし、回転装置の異常を高い精度で診断することのできる異常診断装置及び異常診断方法を提供することにある。
【課題を解決するための手段】
【0009】
前述した目的を達成するために、本発明に係る異常診断装置及び異常診断方法は、下記の構成を有する。
【0010】
(1) 検出した振動及び回転速度に基づいて、回転装置の異常を診断する異常診断装置であって、
回転装置の回転に伴って回転信号を出力する回転速度センサと、
回転信号からN個の周期データを測定し、測定したN個の周期データのうち、M個の周期データが所定の範囲にある場合に、M個の周期データに基づいて回転速度を算出する回転分析部と、
を有することを特徴とする異常診断装置。
【0011】
(2) 検出した振動及び回転速度に基づいて、回転装置の異常を診断する異常診断装置であって、
回転装置の回転に伴って回転信号を出力する回転速度センサと、
回転信号をA/D変換し、変換したディジタル信号についてフーリエ変換による周波数分析を行うことで回転速度を算出する回転分析部と、
を有することを特徴とする異常診断装置。
【0012】
(3) 回転装置は、鉄道車両用、又は自動車用の回転装置である(1)又は(2)に記載の異常診断装置。
【0013】
(4) 検出した振動及び回転速度に基づいて、回転装置の異常を診断する異常診断方法であって、
回転装置の回転に伴う回転信号を出力する工程と、
回転信号からN個の周期データを測定する工程と、
測定したN個の周期データのうち、M個の周期データが所定の範囲にある場合に、M個の周期データに基づいて回転速度を算出する工程と、
を有することを特徴とする異常診断方法。
【0014】
(5) 検出した振動及び回転速度に基づいて、回転装置の異常を診断する異常診断方法であって、
回転装置の回転に伴う回転信号を出力する工程と、
回転信号をA/D変換する工程と、
変換したディジタル信号についてフーリエ変換による周波数分析を行うことで回転速度を算出する工程と、
を有することを特徴とする異常診断方法。
【0015】
(6) 回転装置は、鉄道車両用、又は自動車用の回転装置である(4)又は(5)に記載の異常診断方法。
【発明の効果】
【0016】
本発明によれば、回転速度センサの出力信号にノイズが重畳した場合であっても、ノイズの影響を排除して正確に回転速度を検出することを可能とし、回転装置の異常を高い精度で診断することのできる異常診断装置及び異常診断方法を提供できる。
【発明を実施するための最良の形態】
【0017】
以下、本発明の各実施形態に係る異常診断装置及び異常診断方法について、図面を参照して詳細に説明する。
【0018】
(第1実施形態)
まず、本発明の第1実施形態に係る異常診断装置の全体的な構成について説明する。図1は、第1実施形態に係る異常診断装置の概略構成を示すブロック図である。
【0019】
図1に示すように、本実施形態の異常診断装置は、振動センサ11、フィルタ部12、振動分析部13、異常判定部14、回転速度センサ15及び回転分析部16を備える構成である。
【0020】
振動センサ11は、圧電素子や加速度センサ等の振動測定用素子からなり、軸受の傷や剥離、歯車の欠損、車輪のフラット磨耗等、回転装置の損傷により発生した振動を検出して振動信号を出力する。なお、振動センサ11は、加速度、速度或いは変位型等、振動を電気信号化できるものであればよく、ノイズが多いような機械装置に取り付ける際には、絶縁型を使用する方がノイズの影響を受けることがないので好ましい。また、振動センサ11は、後述する回転速度センサ15や温度センサ等と共に単一の筐体に収納される構成であってもよい。
【0021】
フィルタ部12は、振動センサ11から出力される振動信号に含まれるノイズ等の不要な高周波成分を除去する。
【0022】
振動分析部13は、フィルタ部12から出力される振動信号を基に、回転装置に発生する振動の周波数分析を行う。具体的には、フィルタ部12から出力される振動信号をA/D変換器によりディジタル信号に変換し、FFT(Fast Fourier Transformation:高速フーリエ変換)のアルゴリズムに基づいて振動の周波数スペクトルを算出する。なお、A/D変換は、フィルタ部12による処理を行う前に行われてもよい。
【0023】
異常判定部14は、振動分析部13による振動の周波数スペクトルと、後述する回転分析部16によって算出された回転速度情報に基づいて算出される基準値とを比較して、回転装置の異常の有無を判定する。具体的には、周波数スペクトルから所定の基準値より大きいスペクトル強度のピークを抽出し、ピーク間の周波数と、算出した回転速度における部材の損傷に起因する周波数成分とを比較照合することにより、異常の有無及び異常部位を判定する。
【0024】
回転速度センサ15は、例えば、図11に示したように、回転装置の回転軸に取り付けられた被検出体である歯車や多極磁石等のエンコーダに近接して配置され、回転軸の回転に伴って発生する電圧信号、例えば図3(a)に示すような、正弦波からなる回転信号を出力する。
【0025】
回転分析部16は、回転速度センサ15から出力される回転信号から回転装置の回転速度を算出する。図2に示すように、回転分析部16は、波形整形部161、パルス周期測定部162、パルス周期判定部163及び回転速度算出部164を備える構成である。
【0026】
波形整形部161は、コンパレータ等を用いて回転速度センサ15から出力される正弦波からなる回転信号をパルス信号に整形する。図3(b)は、図3(a)に示した回転速度センサ15の出力を波形整形部161で整形した後のパルス信号の波形を示すものである。
【0027】
パルス周期測定部162は、波形整形部161によって整形された回転信号のパルス列について、任意のN個の周期データであるパルス周期を測定する。なお、Nは、3以上の任意の整数である。図3(b)は、一つおきに3個のパルス周期T1、T2、T3を測定した例を示している。パルス周期の測定は、マイクロコンピュータに内蔵されたタイマ・カウンタ等によって容易に測定することができる。
【0028】
ところで、回転速度センサ15の出力信号には、回転装置の使用環境が劣悪な場合等において、ノイズが重畳することがある。図4(a)は、回転速度センサ15から出力された正弦波からなる回転信号の一部にノイズが重畳した例を示すものである。このように、ノイズが重畳した回転信号を波形整形部161によって波形整形すると、ノイズも併せてパルスに整形されてしまい、このため誤ったパルス周期が測定される。図4(b)は、測定した3個のパルス周期T1〜T3の中に、ノイズの影響を受けて極端に短いパルス周期T2を含んだ場合の例を示すものである。
【0029】
パルス周期判定部163は、パルス周期測定部162によって測定したN個のパルス周期のうち、任意のM個のパルス周期(周期データ)が所定の範囲にある場合に、これを正しいパルス周期と判定し、M個のパルス周期に基づいて所定の演算を行って正しいパルス周期Tを算出する。
【0030】
回転速度算出部164は、パルス周期判定部163によって算出したパルス周期Tから、マイクロコンピュータの演算により回転速度を算出する。このようにして算出された回転速度情報は、図1における異常判定部14に送られ、前述したように回転装置の異常判定に供される。
【0031】
次に、このように構成される回転分析部16の動作について図3及び図4に示す回転信号を基に説明する。図5は、回転分析部16の処理手順を説明するためのタイムチャートである。
【0032】
まず、回転装置における回転軸の回転に伴って回転速度センサ15から出力された、例えば、図3(a)に示すような正弦波からなる回転信号を入力し(ステップS101)、波形整形部161で増幅、整形して、図3(b)に示すようなパルス列を得る(ステップS102)。なお、ステップS101及びS102は、電子回路によるハードウェア処理により行われる。
【0033】
次いで、パルス周期測定部162により、パルス列から任意のパルス周期T1,T2,T3を測定し(ステップS103)、小さい順にソートする(ステップS104)。ここで、測定したパルス周期T1,T2,T3をパルス周期の小さい順にTi,Tj,Tkとする。
【0034】
パルス周期判定部163により、Tiに対するTjとTiの差が所定の基準値、例えば5%以下であるか否かを判定する(ステップS105)。なお、この基準値は、回転装置が適用される鉄道車両や自動車等における回転部分の違いや、回転速度センサ15の稼働環境及び稼働条件によって適宜設定するものであり、通常は1〜10%の範囲で設定する。
【0035】
ステップS105の処理手順で、Tiに対するTjとTiの差が所定の基準値以下であると判定された場合は、周期TiとTjの平均値をとることによって正しい周期Tを算出する(ステップS106)。
【0036】
ステップS107では、正しい周期Tからマイクロコンピュータの演算により回転速度を算出して処理を終了する。このようにして算出した回転速度情報は、図1の異常判定部14に送られて異常判定のための判定条件として使用される。
【0037】
一方、ステップS105の処理手順で、Tjに対するTjとTiの差が所定の基準値を超えると判定された場合は、ステップS108の手順に進み、パルス周期判定部163により、Tjに対するTkとTjの差が所定の基準値以下であるか否かを判定する。
【0038】
ステップS108の処理手順で、Tjに対するTkとTjの差が所定の基準値以下であると判定された場合は、周期TjとTkの平均値をとることによって正しい周期Tを算出し(ステップS109)、ステップS107にて回転速度を算出する。
【0039】
一方、ステップS105の処理手順で、Tjに対するTkとTjの差が所定の基準値を超えると判定された場合は、所定のばらつき範囲にあるパルス周期が測定されなかったことを意味するので、ステップS103の手順に戻って、波形整形部161から出力されるパルス列に対して新たなN個のパルス周期を測定する。
【0040】
このため、図3に示すような3個のパルス周期を測定する場合には、T1とT2の2つのパルス周期の平均値から正常な周期Tが求められ、正しい回転速度を得ることができ、図4に示すような3個のパルス周期を測定する場合には、T1とT3の2つのパルス周期の平均値から正常な周期Tが求められ、正しい回転速度を得ることができる。また、T1,T2,T3の内の2つのパルス周期にノイズが重畳した場合には、再度3個のパルス周期を測定するので、正しい回転速度を得ることができる。
【0041】
以上説明したように、本発明に係る第1実施形態の異常診断装置によれば、振動及び回転速度に基づいて回転装置の異常を診断する際に、回転速度センサ15により検出した回転信号の波形を整形したパルス列からN個(3個)のパルス周期を測定し、2つのパルス周期の差が所定の基準値以下であるパルス周期がM個(2個)ある場合に、それらの算術平均値から正しいパルス周期を求めて回転速度を算出する。
【0042】
これにより、回転速度センサ15から出力される回転信号にノイズが重畳した場合であっても、その影響を効果的に排除して正確に回転速度を検出することが可能となり、回転装置の異常を高い精度で診断することができる。このような異常診断装置は、回転速度が急激に変化する軸受装置等の場合には適用が困難であるが、鉄道車両の車軸や自動車の車軸の回転速度等のように急激に変化することがない車軸用の軸受装置には非常に有効である。
【0043】
なお、N個のパルス周期は、図3,4のように1周期おきに測定されてもよく、回転速度センサの測定対象や使用目的等により、連続した周期を使用することも可能であるし、離散した周期を使用することも可能である。
【0044】
また、上記実施形態では、ステップS106,S109において2つのパルス周期の平均値を正しい周期として回転速度を算出しているが、2つのパルス周期のいずれかを正しい周期として算出してもよい。
【0045】
なお、本実施形態では、説明を分かりやすくするため、3個のパルス周期で説明したが、それ以上であってもよく、N個の周期を測定する場合にも、M個の平均値から回転速度を算出してもよい。即ち、図6に示すように、ステップS103にて、N個のパルス周期Tl(l=1,・・・,N)を測定した後、M個のパルス周期Tlが所定の範囲にあるかどうかを判断し(ステップS110)、M個のパルス周期が所定の範囲にある場合に、正しい周期Tを計算し(ステップS111)、ステップS107にて、この周期Tから回転速度を算出するものであればよい。従って、ステップS111における計算手法として、2つのパルス周期の差が所定の基準値以下であるM個のパルス周期について平均値を求め、正しいパルス周期としたが、これに限るものではなく、例えばM個のパルス周期分布の中央値や、出現頻度の最も多いものを用いてもよく、さらには他の演算方法により算出してもよい。また、ステップS110における判断手法も、上記実施形態のものに限定されるものでない。
【0046】
(第2実施形態)
本発明の第2実施形態に係る異常診断装置の全体的な構成は、図1に示した第1実施形態の異常診断装置と同じであり、回転分析部16の内部構成のみが異なる。このため、第1実施形態と同等部分については、同一符号を付して説明を省略或いは簡略化する。
【0047】
図1に示す本実施形態の回転分析部26は、第1実施形態における回転分析部16と同様に、回転速度センサ15から出力される回転信号から回転軸の回転速度を算出する。以下、回転分析部26の構成及び動作について、図面を用いて詳細に説明する。図7は、回転分析部26の概略構成を示すブロック図である。
【0048】
図7に示すように、回転分析部26は、A/D変換器262、周波数分析部263、回転速度算出部264を有する構成である。
【0049】
A/D変換器262は、アナログの回転信号をA/D変換し、ディジタル信号に変換する。
【0050】
周波数分析部263は、ディジタル化された回転信号をFFTアルゴリズムに基づいて演算して周波数スペクトルを算出し、周波数スペクトル強度の最大ピークを示す周波数成分から回転信号の基本周波数を求める。
【0051】
回転速度算出部264は、周波数分析部263によって求められたパルス列の基本周波数に基づいて、マイクロコンピュータの演算により回転装置の回転速度を算出する。
【0052】
次に、このように構成された本実施形態の回転分析部26の動作について、図8〜図10を用いて説明する。図8は、回転分析部26の処理手順を説明するためのタイムチャートである。
【0053】
まず、回転装置における回転軸の回転に伴って回転速度センサ15から出力されたアナログ信号である回転信号を入力し(ステップS201)、A/D変換器262によりディジタル信号に変換する(ステップS202)。
【0054】
次いで、周波数分析部263でFFTアルゴリズムに基づく周波数分析を行い(ステップS203)、図9に示すような周波数スペクトルを算出する。この周波数スペクトルにはいくつかのピークが現れるが、その中の最大のピーク強度を示す基本周波数が回転パルス信号の周波数に相当する。従って、これを抽出して回転信号の正しい周期Tを算出する(ステップS204)。
【0055】
ステップS205では、算出された周期からマイクロコンピュータの演算により回転速度を算出する。このようにして求められた回転速度信号は、図1に示す異常判定部14に送られ、回転装置の異常判定に供される。
【0056】
このように、本実施形態の回転分析部26は、回転速度センサ15から出力される回転信号をA/D変換してFFT処理し、周波数スペクトルを算出する。そして、周波数スペクトルの最大ピーク強度を示す周波数成分から回転信号の周期を算出するので、回転速度センサ15から出力される回転信号に重畳したチャタリング等のノイズは、FFTを行うことで高い周波数域に遷移させることができ、回転信号の周期算出に際して影響を与えることがない。
【0057】
なお、A/D変換器262に入力する回転信号は必ずしも正弦波だけでなく、矩形波などの回転速度に比例した周波数成分を持つ波形であればよい。正弦波を直接A/D変換することによって、第1実施形態と比べ、波形整形部161が不要となるので、回路構成を簡略化することができる。
【0058】
また、回転分析部26におけるFFTアルゴリズムの実行は、CPUによるソフトウェア処理によって行われる。また、A/D変換は、マイコンの空いているAD入力ポートを利用することにより実現できる。
【0059】
以上説明したように、このような本発明の第2実施形態に係る異常診断装置によれば、振動及び回転速度に基づいて回転装置の異常を診断する際に、回転速度センサ15により検出した回転信号をA/D変換してFFT処理し、算出した周波数スペクトルの最大ピーク強度を示す周波数から回転信号の周期を求め、回転速度を算出する。これにより、回転速度センサ15の回転信号に含まれるノイズの影響を排除して、回転装置の回転速度を正確に検出することが可能となり、回転装置の異常を高い精度で診断することができる。
【0060】
なお、本発明は、前述した各実施形態に限定されるものでなく、適宜、変形、改良等が可能である。
【図面の簡単な説明】
【0061】
【図1】本発明の第1及び第2実施形態に係る異常診断装置の概略構成を示すブロック図である。
【図2】本発明の第1実施形態に係る異常診断装置の回転分析部の構成を示すブロック図である。
【図3】(a)は、第1実施形態の異常診断装置における回転速度センサの回転信号の波形を示す図であり、(b)は、回転速度センサの回転信号を整形した後の波形を示す図である。
【図4】(a)は、第1実施形態の異常診断装置における回転速度センサにノイズが重畳した回転信号の波形を示す図であり、(b)は、回転速度センサのノイズが重畳した回転信号を整形した後の波形を示す図である。
【図5】本発明の第1実施形態に係る異常診断装置の回転分析部の処理手順を説明するためのタイムチャートである。
【図6】図5の回転分析部の処理手順をより一般化して説明したタイムチャートである。
【図7】本発明の第2実施形態に係る異常診断装置の回転分析部の構成を示すブロック図である。
【図8】本発明の第2実施形態に係る異常診断装置の回転分析部の処理手順を説明するためのタイムチャートである。
【図9】第2実施形態の異常診断装置における回転速度センサの回転パルス信号の周波数スペクトルを示す図である。
【図10】第2実施形態の異常診断装置における回転速度センサの正弦波からなる回転信号を示す図である。
【図11】従来の異常診断装置の構成を示す図である。
【符号の説明】
【0062】
11 振動センサ
12 フィルタ部
13 振動分析部
14 異常判定部
15 回転速度センサ
16、26 回転分析部
161 波形整形部
162 パルス周期測定部
163 パルス周期判定部
164、264 回転速度算出部
262 A/D変換器
263 周波数分析部
【特許請求の範囲】
【請求項1】
検出した振動及び回転速度に基づいて、回転装置の異常を診断する異常診断装置であって、
前記回転装置の回転に伴って回転信号を出力する回転速度センサと、
前記回転信号からN個の周期データを測定し、前記測定したN個の周期データのうち、M個の周期データが所定の範囲にある場合に、前記M個の周期データに基づいて前記回転速度を算出する回転分析部と、
を有することを特徴とする異常診断装置。
【請求項2】
検出した振動及び回転速度に基づいて、回転装置の異常を診断する異常診断装置であって、
前記回転装置の回転に伴って回転信号を出力する回転速度センサと、
前記回転信号をA/D変換し、前記変換したディジタル信号についてフーリエ変換による周波数分析を行うことで前記回転速度を算出する回転分析部と、
を有することを特徴とする異常診断装置。
【請求項3】
前記回転装置は、鉄道車両用、又は自動車用の回転装置である請求項1又は2に記載の異常診断装置。
【請求項4】
検出した振動及び回転速度に基づいて、回転装置の異常を診断する異常診断方法であって、
前記回転装置の回転に伴う回転信号を出力する工程と、
前記回転信号からN個の周期データを測定する工程と、
前記測定したN個の周期データのうち、M個の周期データが所定の範囲にある場合に、前記M個の周期データに基づいて前記回転速度を算出する工程と、
を有することを特徴とする異常診断方法。
【請求項5】
検出した振動及び回転速度に基づいて、回転装置の異常を診断する異常診断方法であって、
前記回転装置の回転に伴う回転信号を出力する工程と、
前記回転信号をA/D変換する工程と、
前記変換したディジタル信号についてフーリエ変換による周波数分析を行うことで前記回転速度を算出する工程と、
を有することを特徴とする異常診断方法。
【請求項6】
前記回転装置は、鉄道車両用、又は自動車用の回転装置である請求項4又は5に記載の異常診断方法。
【請求項1】
検出した振動及び回転速度に基づいて、回転装置の異常を診断する異常診断装置であって、
前記回転装置の回転に伴って回転信号を出力する回転速度センサと、
前記回転信号からN個の周期データを測定し、前記測定したN個の周期データのうち、M個の周期データが所定の範囲にある場合に、前記M個の周期データに基づいて前記回転速度を算出する回転分析部と、
を有することを特徴とする異常診断装置。
【請求項2】
検出した振動及び回転速度に基づいて、回転装置の異常を診断する異常診断装置であって、
前記回転装置の回転に伴って回転信号を出力する回転速度センサと、
前記回転信号をA/D変換し、前記変換したディジタル信号についてフーリエ変換による周波数分析を行うことで前記回転速度を算出する回転分析部と、
を有することを特徴とする異常診断装置。
【請求項3】
前記回転装置は、鉄道車両用、又は自動車用の回転装置である請求項1又は2に記載の異常診断装置。
【請求項4】
検出した振動及び回転速度に基づいて、回転装置の異常を診断する異常診断方法であって、
前記回転装置の回転に伴う回転信号を出力する工程と、
前記回転信号からN個の周期データを測定する工程と、
前記測定したN個の周期データのうち、M個の周期データが所定の範囲にある場合に、前記M個の周期データに基づいて前記回転速度を算出する工程と、
を有することを特徴とする異常診断方法。
【請求項5】
検出した振動及び回転速度に基づいて、回転装置の異常を診断する異常診断方法であって、
前記回転装置の回転に伴う回転信号を出力する工程と、
前記回転信号をA/D変換する工程と、
前記変換したディジタル信号についてフーリエ変換による周波数分析を行うことで前記回転速度を算出する工程と、
を有することを特徴とする異常診断方法。
【請求項6】
前記回転装置は、鉄道車両用、又は自動車用の回転装置である請求項4又は5に記載の異常診断方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【公開番号】特開2007−248061(P2007−248061A)
【公開日】平成19年9月27日(2007.9.27)
【国際特許分類】
【出願番号】特願2006−67912(P2006−67912)
【出願日】平成18年3月13日(2006.3.13)
【出願人】(000004204)日本精工株式会社 (8,378)
【Fターム(参考)】
【公開日】平成19年9月27日(2007.9.27)
【国際特許分類】
【出願日】平成18年3月13日(2006.3.13)
【出願人】(000004204)日本精工株式会社 (8,378)
【Fターム(参考)】
[ Back to top ]