
異常診断装置
【課題】振動検出器を備えた軸受の異常診断装置において、振動検出器の異常を検出することを可能とすること。
【解決手段】振動検出器によって検出された振動信号に含まれる所定の周波数帯域のスペクトル強度の平均値が、軸受の回転速度から導かれる閾値よりも小さくなったときに、振動検出器の異常であると判定する振動検出器診断処理手段を設ける。
【解決手段】振動検出器によって検出された振動信号に含まれる所定の周波数帯域のスペクトル強度の平均値が、軸受の回転速度から導かれる閾値よりも小さくなったときに、振動検出器の異常であると判定する振動検出器診断処理手段を設ける。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、例えば、鉄道車両、自動車等といった車両の車軸を支持するために用いられる車両用軸受等の傷等の異常を、軸受が発する振動を解析することによって診断する異常診断装置に関し、特に、振動を検出する振動検出器の異常を検出する機能を備えた異常診断装置に関する。
【背景技術】
【0002】
従来の異常診断技術としては特許文献1に示されているものがある。その構成は、被測定物から発生する音又は振動をセンサにより検出して電気信号へ変換し、A/D変換を行い、その信号のエンベロープ(包絡線)を求めるエンベロープ処理をした後、高速フーリエ変換(FFT)を行い、周波数スペクトルの移動平均処理することにより平滑化した上でピークを検出し、そのピークに基づいて異常を診断するものである。
しかしながら、上記の振動を検出するセンサ(以下、「振動検出器」という。)が異常であれば、軸受が正常であるにもかかわらず振動検出器の出力は異常なものとなり、結果としては軸受が異常であると判定されてしまうことになる。逆に言えば、軸受の異常診断結果が異常なものであったとしても、それが軸受自体の異常なのか振動検出器の異常なのかが分からないため、判定結果をそのまま信用できないという問題がある。
【特許文献1】特開2006−113002号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
本発明は、かかる従来の異常診断装置における問題点に鑑み為されたものであり、振動検出器を備えた軸受の異常診断装置において、振動検出器の異常を検出することが可能な異常診断装置を提供することを目的とする。
【課題を解決するための手段】
【0004】
本発明は、軸受の回転速度を検出するための回転検出器と、前記軸受の振動を検出するための振動検出器と、前記振動検出器から出力される振動信号をA/D変換するA/D変換器と、前記A/D変換器の出力信号と前記軸受の回転速度とを基に演算処理をして前記軸受の異常診断を行う軸受診断処理手段とを備えた、前記軸受の異常を診断する異常診断装置に関し、本発明の上記目的は、前記出力信号を処理して得られる値が、所定の振動検出器異常閾値よりも小さいときに、前記振動検出器の異常と診断する振動検出器診断処理手段を備えることによって達成される。
【0005】
また、本発明の上記目的は、前記出力信号を処理して得られる値を、前記出力信号に含まれる所定の周波数帯域のスペクトル強度の平均値、或いは、前記出力信号の実効値とすることによって効果的に達成される。
【0006】
さらに、本発明の上記目的は、前記所定の振動検出器異常閾値を前記軸受の回転速度から導くことによって、さらに効果的に達成される。
【発明の効果】
【0007】
本発明に係る異常診断装置によれば、従来行われている異常診断処理において取得したデータに基づいて振動検出器の異常診断が可能となる。従って特別な装置を用意することなく振動検出器の異常診断が行えるため、軸受の異常診断の信頼性が向上する。
【発明を実施するための最良の形態】
【0008】
以下、図面を参照にしながら、本発明を実施するための最良の形態について説明する。
【0009】
[第1実施形態]
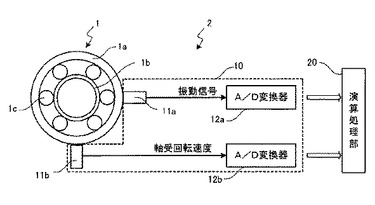
図1は、本発明に係る異常診断装置の第1実施形態を示すブロック図である。本実施形態において異常診断の対象となる軸受は、例えば鉄道車両の車軸を支持する車両用軸受装置内に配される転がり軸受である。同図において、軸受1は、車体側ハウジング等に内嵌された外輪1aと、車軸に外嵌されて該車軸とともに回転する内輪1bと、外輪1aと内輪1bとの間に転動自在に配設された複数の転動体(ボールまたはころ)1cとを備えている。
本発明に係る異常診断装置2は、このような鉄道車両等に使用される転がり軸受1を診断対象として、軸受の傷や剥離等による異常の発生およびその予兆を検知するものである。図1において、異常診断装置2は、軸受1から発生する振動及び軸受の回転速度を検出するための検出部10と、該検出部10からの出力に基づいて、軸受1の異常を診断する演算処理部20とを備えている。
検出部10は、軸受1から発生する振動を、電気信号である振動信号に変換する振動検出手段としての振動検出器11a及び該振動検出器11aから出力される振動信号をA/D変換するA/D変換器12a、並びに、軸受1の回転速度を電気信号である回転速度信号に変換する回転速度検出手段としての回転検出器11b及び該回転検出器11bから出力される回転速度信号をA/D変換するA/D変換器12bを備えている。
また、演算処理部20は、検出部10のA/D変換器12a、12bからの出力に基づいて、軸受1の異常を診断する機能を有しており、本実施形態では鉄道の制御系と接続され、軸受1の異常診断結果に応じた制御信号を制御系に出力するようにしている。鉄道車両の制御系では、車両走行中、演算処理部20からフィードバックされる診断結果を常時監視し、軸受1の異常あるいはその予兆が検知された際には、速やかにしかるべき対処動作を実施する。
【0010】
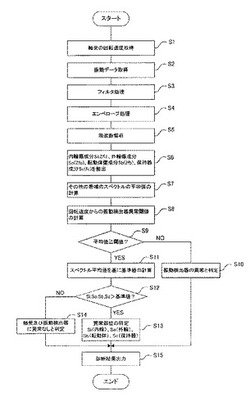
図2は、本実施形態における振動による軸受の異常診断処理の例を示すフローチャートである。
異常診断装置2内の演算処理部20は、検出部10のA/D変換器12bから回転速度信号を取得し(ステップS1)、検出部10のA/D変換器12aから振幅補正後の振動データを取得し(ステップS2)、該振動データを高速フーリエ変換(FFT)して周波数解析し、得られたパワースペクトルに含まれるピークとなる周波数と、軸受諸元(転動体1cの数や直径等)及び軸受1の回転速度から得られる特徴周波数とを比較し、軸受1の剥離等の異常を検出する。
【0011】
詳しくは、ステップS3〜ステップS15に示すように、先ず、演算処理部20は、上記ステップS2で取得した振動データから不要な周波数帯域の信号を取り除くフィルタ処理をした後(ステップS3)、抽出された所定の周波数帯域の信号のエンベロープ(包絡線波形)を検波するエンベロープ処理を実施する(ステップS4)。そして、エンベロープ処理により得られたエンベロープの周波数解析を実施する(ステップS5)。
そして、周波数解析によって得られたパワースペクトルから、異常とみなす各傷成分の周波数帯域において、ピークとなる周波数(スペクトル強度)を抽出する(ステップS6)。
そして、その他の周波数帯域のスペクトル強度の平均値を計算するとともに(ステップS7)、ステップS1で取得した回転速度から振動検出器異常閾値を計算する(ステップS8)。
次に、ステップS7で求めたスペクトルの平均値と、ステップS8で求めた閾値とを比較し、平均値が閾値よりも小さいときは(ステップS9の“NO”)、振動検出器の異常と判定し(ステップS10)、その旨を示す情報をモニタ等に表示する(ステップS15)。また、その診断結果に応じた制御信号を鉄道車両の制御系に出力するようにしてもよい。
【0012】
一方、ステップS9において、平均値が閾値以上であれば(ステップS9の“YES”)、振動検出器は正常であるので、スペクトルの平均値に基づいて基準値を算出し(ステップS11)、この基準値と、異常とみなす特徴周波数におけるスペクトルのピーク値とを比較する(ステップS12)。
ここで、異常とみなす特徴周波数について説明する。
軸受1に傷等の欠陥が生じた場合の振動周波数は、軸受1の構成要素(各部材)によって異なるが、異常とみなす各構成要素の周波数帯域は、車軸とともに回転する内輪1bの回転周波数frを基に求めることが可能である。
下記の表1は、軸受1の構成要素となる各部材の欠陥、具体的には、傷と、各部材(図1中の内輪1b、外輪1a及び転動体1c、及び図示されない保持器)で発生する異常振動周波数(エンベロープ処理後の周波数)との関係を示している。
【表1】

そして、前記ステップS12においては、ステップS11で設定した基準値と各傷成分の特徴周波数(Zfi,Zfc,2fb,fc)におけるスペクトルのピーク値とを比較する。
そして、各特徴周波数(Zfi,Zfc,2fb,fc)におけるスペクトルのピーク値が全て基準値以下であれば、軸受1は異常なしと判定する(ステップS14)。一方、各特徴周波数(Zfi,Zfc,2fb,fc)におけるスペクトルのピーク値のいずれかが基準値を超えている場合には、軸受1に異常ありと判断し、当該特徴周波数を基に異常部位を特定し(ステップS13)、その旨を示す情報をモニタ等に表示する(ステップS15)。
【0013】
なお、上記ステップS7においてその他の帯域のスペクトルの平均値を計算しているが、これに限らず実効値等を用いても良い。
また、振動検出器の異常診断処理において、上記ステップS8で振動検出器異常閾値を軸受の回転速度から計算で求めているが、振動検出器が故障した場合、スペクトル平均値又は実効値は小さな値となるため、振動検出器異常閾値を軸受の回転速度から求めるのではなく固定値としてもよい。
また、軸受回転速度をAD変換により求めたが、この限りでなく、例えば、回転パルスを演算処理部のインプットキャプチャ入力端子へ入力させてもよい。
【0014】
[第2実施形態]
図3は、本発明に係る異常診断装置の第2実施形態を示すブロック図である。なお、同図において、第1実施形態と同一の構成部には同一の符号を付して、その説明を簡略化または省略する。
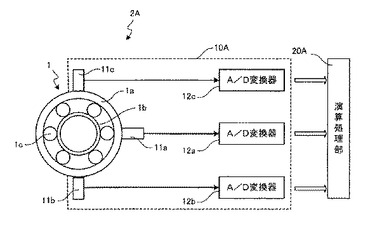
同図において、本実施形態に係る異常診断装置2Aは、軸受1から発生する温度、振動および軸受1の回転状態を検出するための検出部10Aと、該検出部10Aからの出力に基づいて、軸受1の異常を診断する演算処理部20Aとを備えている。すなわち、上述した第1実施形態では、軸受1及び振動検出器11aの異常を判定するパラメータとして振動データと回転速度データを用いていたが、本実施形態においては、さらに温度データを加えて、軸受1及び振動検出器11aの異常を判定するようになっている。
検出部10Aは、振動検出器11a、および該振動検出器11aから出力される振動信号をA/D変換するA/D変換器12a、軸受1の回転状態を電気信号である回転速度信号に変換する回転速度検出手段としての回転検出器11bと、回転検出器11bから出力される回転速度信号をA/D変換するA/D変換器12b、及び軸受1の温度状態を電気信号である温度信号に変換する温度検出手段としての温度検出器11cと、該温度検出器11cから出力される温度信号をA/D変換するA/D変換器12cとを備えている。
また、演算処理部20Aは、上記構成からなる各検出部10AのA/D変換器12a,12b,12cから出力される量子化データに基づいて、軸受1の異常を診断する機能を有している。なお、本実施形態における演算処理部20Aは、上述した第1実施形態と同様、鉄道の制御系と接続され、軸受1の異常診断結果に応じた制御信号を制御系に出力するようにしている。
【0015】
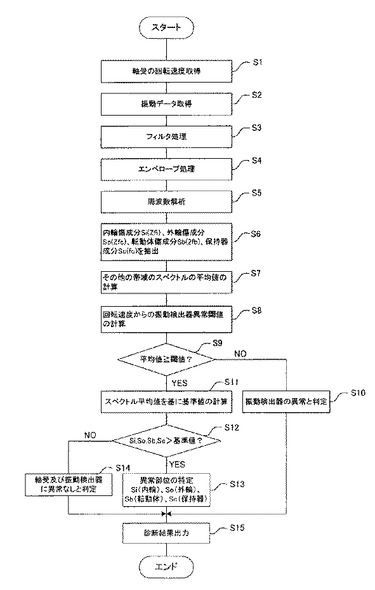
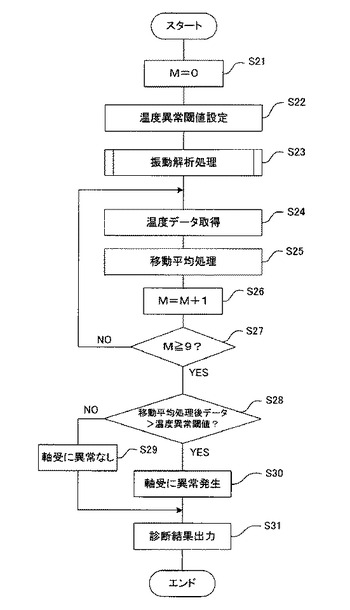
図4は、振動データと温度データとに基づいて、軸受1を異常診断する処理例を示すフローチャートである。本実施形態に係る演算処理部20Aは、図2に示した振動解析処理に加えて、温度の状態も診断することにより、軸受の各種の異常を一層高精度に検出できるようになっている。
演算処理部20Aは、まず温度データ取得回数の値Mを初期値(M=0)にセットするとともに(ステップS21)、温度異常を判定するための閾値の設定を行う。この閾値は、実測または理論計算に基づいて選定され、例えばオペレータによって予め設定されている(ステップS22)。
【0016】
続いて、図2に示したフローチャートにしたがって、振動検出器11a及び軸受1の異常診断処理を実施する(ステップS23)。
【0017】
次に、温度検出器11cで検出した軸受1の温度データをA/D変換器11cを介して取得する(ステップS24)。そして、取得した温度データを移動平均処理することにより、A/D変換時に重畳したノイズの影響を低減させる。移動平均処理した温度データはメモリ等に保存しておく(ステップS25)。その後、温度データ取得回数の値Mをインクリメント(M=M+1)し(ステップS26)、ステップS24に戻って、ステップS26までの処理を繰り返す。そして、ステップS27において、規定回数(本例ではM=9回)繰り返したと判定した場合は、移動平均処理後の温度データの値と温度異常の閾値とを比較する(ステップS28)。そして、温度データの値が閾値以下であれば、軸受1に異常なしと判定する(ステップS29)。
一方、温度データの値が温度異常の閾値を超えていれば、軸受1に異常ありと判断し(ステップS30)、その診断結果に応じた制御信号を鉄道車両の制御系に出力するとともに、例えばその旨を示す情報をモニタ等に表示する(ステップS31)。したがって、軸受1の振動もしくは温度の異常が検出された場合には、当該制御信号が鉄道車両の制御系に出力されるとともに、診断結果が表示される。
【0018】
なお、上述した実施の形態においては、鉄道車両用の軸受を診断対象とした場合を例として説明したが、鉄道車両用の軸受に限らず、自動車や船舶など、乗物全般に使用される軸受を診断対象とすることができる。
【図面の簡単な説明】
【0019】
【図1】本発明の第1実施形態に係る異常診断装置を示すブロック図である。
【図2】第1実施形態における軸受の異常診断処理の例を説明するためのフローチャートである。
【図3】本発明の第2実施形態に係る異常診断装置を示すブロック図である。
【図4】第2実施形態における振動および温度による軸受の異常診断処理の例を説明するためのフローチャートである。
【符号の説明】
【0020】
1 軸受
2,2A 異常診断装置
10,10A 検出部
11a 振動検出手段(振動検出器)
11b 回転速度検出手段(回転検出器)
11c 温度検出手段(温度検出器)
12a,12b,12c A/D変換器
20,20A 演算処理部
【技術分野】
【0001】
本発明は、例えば、鉄道車両、自動車等といった車両の車軸を支持するために用いられる車両用軸受等の傷等の異常を、軸受が発する振動を解析することによって診断する異常診断装置に関し、特に、振動を検出する振動検出器の異常を検出する機能を備えた異常診断装置に関する。
【背景技術】
【0002】
従来の異常診断技術としては特許文献1に示されているものがある。その構成は、被測定物から発生する音又は振動をセンサにより検出して電気信号へ変換し、A/D変換を行い、その信号のエンベロープ(包絡線)を求めるエンベロープ処理をした後、高速フーリエ変換(FFT)を行い、周波数スペクトルの移動平均処理することにより平滑化した上でピークを検出し、そのピークに基づいて異常を診断するものである。
しかしながら、上記の振動を検出するセンサ(以下、「振動検出器」という。)が異常であれば、軸受が正常であるにもかかわらず振動検出器の出力は異常なものとなり、結果としては軸受が異常であると判定されてしまうことになる。逆に言えば、軸受の異常診断結果が異常なものであったとしても、それが軸受自体の異常なのか振動検出器の異常なのかが分からないため、判定結果をそのまま信用できないという問題がある。
【特許文献1】特開2006−113002号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
本発明は、かかる従来の異常診断装置における問題点に鑑み為されたものであり、振動検出器を備えた軸受の異常診断装置において、振動検出器の異常を検出することが可能な異常診断装置を提供することを目的とする。
【課題を解決するための手段】
【0004】
本発明は、軸受の回転速度を検出するための回転検出器と、前記軸受の振動を検出するための振動検出器と、前記振動検出器から出力される振動信号をA/D変換するA/D変換器と、前記A/D変換器の出力信号と前記軸受の回転速度とを基に演算処理をして前記軸受の異常診断を行う軸受診断処理手段とを備えた、前記軸受の異常を診断する異常診断装置に関し、本発明の上記目的は、前記出力信号を処理して得られる値が、所定の振動検出器異常閾値よりも小さいときに、前記振動検出器の異常と診断する振動検出器診断処理手段を備えることによって達成される。
【0005】
また、本発明の上記目的は、前記出力信号を処理して得られる値を、前記出力信号に含まれる所定の周波数帯域のスペクトル強度の平均値、或いは、前記出力信号の実効値とすることによって効果的に達成される。
【0006】
さらに、本発明の上記目的は、前記所定の振動検出器異常閾値を前記軸受の回転速度から導くことによって、さらに効果的に達成される。
【発明の効果】
【0007】
本発明に係る異常診断装置によれば、従来行われている異常診断処理において取得したデータに基づいて振動検出器の異常診断が可能となる。従って特別な装置を用意することなく振動検出器の異常診断が行えるため、軸受の異常診断の信頼性が向上する。
【発明を実施するための最良の形態】
【0008】
以下、図面を参照にしながら、本発明を実施するための最良の形態について説明する。
【0009】
[第1実施形態]
図1は、本発明に係る異常診断装置の第1実施形態を示すブロック図である。本実施形態において異常診断の対象となる軸受は、例えば鉄道車両の車軸を支持する車両用軸受装置内に配される転がり軸受である。同図において、軸受1は、車体側ハウジング等に内嵌された外輪1aと、車軸に外嵌されて該車軸とともに回転する内輪1bと、外輪1aと内輪1bとの間に転動自在に配設された複数の転動体(ボールまたはころ)1cとを備えている。
本発明に係る異常診断装置2は、このような鉄道車両等に使用される転がり軸受1を診断対象として、軸受の傷や剥離等による異常の発生およびその予兆を検知するものである。図1において、異常診断装置2は、軸受1から発生する振動及び軸受の回転速度を検出するための検出部10と、該検出部10からの出力に基づいて、軸受1の異常を診断する演算処理部20とを備えている。
検出部10は、軸受1から発生する振動を、電気信号である振動信号に変換する振動検出手段としての振動検出器11a及び該振動検出器11aから出力される振動信号をA/D変換するA/D変換器12a、並びに、軸受1の回転速度を電気信号である回転速度信号に変換する回転速度検出手段としての回転検出器11b及び該回転検出器11bから出力される回転速度信号をA/D変換するA/D変換器12bを備えている。
また、演算処理部20は、検出部10のA/D変換器12a、12bからの出力に基づいて、軸受1の異常を診断する機能を有しており、本実施形態では鉄道の制御系と接続され、軸受1の異常診断結果に応じた制御信号を制御系に出力するようにしている。鉄道車両の制御系では、車両走行中、演算処理部20からフィードバックされる診断結果を常時監視し、軸受1の異常あるいはその予兆が検知された際には、速やかにしかるべき対処動作を実施する。
【0010】
図2は、本実施形態における振動による軸受の異常診断処理の例を示すフローチャートである。
異常診断装置2内の演算処理部20は、検出部10のA/D変換器12bから回転速度信号を取得し(ステップS1)、検出部10のA/D変換器12aから振幅補正後の振動データを取得し(ステップS2)、該振動データを高速フーリエ変換(FFT)して周波数解析し、得られたパワースペクトルに含まれるピークとなる周波数と、軸受諸元(転動体1cの数や直径等)及び軸受1の回転速度から得られる特徴周波数とを比較し、軸受1の剥離等の異常を検出する。
【0011】
詳しくは、ステップS3〜ステップS15に示すように、先ず、演算処理部20は、上記ステップS2で取得した振動データから不要な周波数帯域の信号を取り除くフィルタ処理をした後(ステップS3)、抽出された所定の周波数帯域の信号のエンベロープ(包絡線波形)を検波するエンベロープ処理を実施する(ステップS4)。そして、エンベロープ処理により得られたエンベロープの周波数解析を実施する(ステップS5)。
そして、周波数解析によって得られたパワースペクトルから、異常とみなす各傷成分の周波数帯域において、ピークとなる周波数(スペクトル強度)を抽出する(ステップS6)。
そして、その他の周波数帯域のスペクトル強度の平均値を計算するとともに(ステップS7)、ステップS1で取得した回転速度から振動検出器異常閾値を計算する(ステップS8)。
次に、ステップS7で求めたスペクトルの平均値と、ステップS8で求めた閾値とを比較し、平均値が閾値よりも小さいときは(ステップS9の“NO”)、振動検出器の異常と判定し(ステップS10)、その旨を示す情報をモニタ等に表示する(ステップS15)。また、その診断結果に応じた制御信号を鉄道車両の制御系に出力するようにしてもよい。
【0012】
一方、ステップS9において、平均値が閾値以上であれば(ステップS9の“YES”)、振動検出器は正常であるので、スペクトルの平均値に基づいて基準値を算出し(ステップS11)、この基準値と、異常とみなす特徴周波数におけるスペクトルのピーク値とを比較する(ステップS12)。
ここで、異常とみなす特徴周波数について説明する。
軸受1に傷等の欠陥が生じた場合の振動周波数は、軸受1の構成要素(各部材)によって異なるが、異常とみなす各構成要素の周波数帯域は、車軸とともに回転する内輪1bの回転周波数frを基に求めることが可能である。
下記の表1は、軸受1の構成要素となる各部材の欠陥、具体的には、傷と、各部材(図1中の内輪1b、外輪1a及び転動体1c、及び図示されない保持器)で発生する異常振動周波数(エンベロープ処理後の周波数)との関係を示している。
【表1】
そして、前記ステップS12においては、ステップS11で設定した基準値と各傷成分の特徴周波数(Zfi,Zfc,2fb,fc)におけるスペクトルのピーク値とを比較する。
そして、各特徴周波数(Zfi,Zfc,2fb,fc)におけるスペクトルのピーク値が全て基準値以下であれば、軸受1は異常なしと判定する(ステップS14)。一方、各特徴周波数(Zfi,Zfc,2fb,fc)におけるスペクトルのピーク値のいずれかが基準値を超えている場合には、軸受1に異常ありと判断し、当該特徴周波数を基に異常部位を特定し(ステップS13)、その旨を示す情報をモニタ等に表示する(ステップS15)。
【0013】
なお、上記ステップS7においてその他の帯域のスペクトルの平均値を計算しているが、これに限らず実効値等を用いても良い。
また、振動検出器の異常診断処理において、上記ステップS8で振動検出器異常閾値を軸受の回転速度から計算で求めているが、振動検出器が故障した場合、スペクトル平均値又は実効値は小さな値となるため、振動検出器異常閾値を軸受の回転速度から求めるのではなく固定値としてもよい。
また、軸受回転速度をAD変換により求めたが、この限りでなく、例えば、回転パルスを演算処理部のインプットキャプチャ入力端子へ入力させてもよい。
【0014】
[第2実施形態]
図3は、本発明に係る異常診断装置の第2実施形態を示すブロック図である。なお、同図において、第1実施形態と同一の構成部には同一の符号を付して、その説明を簡略化または省略する。
同図において、本実施形態に係る異常診断装置2Aは、軸受1から発生する温度、振動および軸受1の回転状態を検出するための検出部10Aと、該検出部10Aからの出力に基づいて、軸受1の異常を診断する演算処理部20Aとを備えている。すなわち、上述した第1実施形態では、軸受1及び振動検出器11aの異常を判定するパラメータとして振動データと回転速度データを用いていたが、本実施形態においては、さらに温度データを加えて、軸受1及び振動検出器11aの異常を判定するようになっている。
検出部10Aは、振動検出器11a、および該振動検出器11aから出力される振動信号をA/D変換するA/D変換器12a、軸受1の回転状態を電気信号である回転速度信号に変換する回転速度検出手段としての回転検出器11bと、回転検出器11bから出力される回転速度信号をA/D変換するA/D変換器12b、及び軸受1の温度状態を電気信号である温度信号に変換する温度検出手段としての温度検出器11cと、該温度検出器11cから出力される温度信号をA/D変換するA/D変換器12cとを備えている。
また、演算処理部20Aは、上記構成からなる各検出部10AのA/D変換器12a,12b,12cから出力される量子化データに基づいて、軸受1の異常を診断する機能を有している。なお、本実施形態における演算処理部20Aは、上述した第1実施形態と同様、鉄道の制御系と接続され、軸受1の異常診断結果に応じた制御信号を制御系に出力するようにしている。
【0015】
図4は、振動データと温度データとに基づいて、軸受1を異常診断する処理例を示すフローチャートである。本実施形態に係る演算処理部20Aは、図2に示した振動解析処理に加えて、温度の状態も診断することにより、軸受の各種の異常を一層高精度に検出できるようになっている。
演算処理部20Aは、まず温度データ取得回数の値Mを初期値(M=0)にセットするとともに(ステップS21)、温度異常を判定するための閾値の設定を行う。この閾値は、実測または理論計算に基づいて選定され、例えばオペレータによって予め設定されている(ステップS22)。
【0016】
続いて、図2に示したフローチャートにしたがって、振動検出器11a及び軸受1の異常診断処理を実施する(ステップS23)。
【0017】
次に、温度検出器11cで検出した軸受1の温度データをA/D変換器11cを介して取得する(ステップS24)。そして、取得した温度データを移動平均処理することにより、A/D変換時に重畳したノイズの影響を低減させる。移動平均処理した温度データはメモリ等に保存しておく(ステップS25)。その後、温度データ取得回数の値Mをインクリメント(M=M+1)し(ステップS26)、ステップS24に戻って、ステップS26までの処理を繰り返す。そして、ステップS27において、規定回数(本例ではM=9回)繰り返したと判定した場合は、移動平均処理後の温度データの値と温度異常の閾値とを比較する(ステップS28)。そして、温度データの値が閾値以下であれば、軸受1に異常なしと判定する(ステップS29)。
一方、温度データの値が温度異常の閾値を超えていれば、軸受1に異常ありと判断し(ステップS30)、その診断結果に応じた制御信号を鉄道車両の制御系に出力するとともに、例えばその旨を示す情報をモニタ等に表示する(ステップS31)。したがって、軸受1の振動もしくは温度の異常が検出された場合には、当該制御信号が鉄道車両の制御系に出力されるとともに、診断結果が表示される。
【0018】
なお、上述した実施の形態においては、鉄道車両用の軸受を診断対象とした場合を例として説明したが、鉄道車両用の軸受に限らず、自動車や船舶など、乗物全般に使用される軸受を診断対象とすることができる。
【図面の簡単な説明】
【0019】
【図1】本発明の第1実施形態に係る異常診断装置を示すブロック図である。
【図2】第1実施形態における軸受の異常診断処理の例を説明するためのフローチャートである。
【図3】本発明の第2実施形態に係る異常診断装置を示すブロック図である。
【図4】第2実施形態における振動および温度による軸受の異常診断処理の例を説明するためのフローチャートである。
【符号の説明】
【0020】
1 軸受
2,2A 異常診断装置
10,10A 検出部
11a 振動検出手段(振動検出器)
11b 回転速度検出手段(回転検出器)
11c 温度検出手段(温度検出器)
12a,12b,12c A/D変換器
20,20A 演算処理部
【特許請求の範囲】
【請求項1】
軸受の回転速度を検出するための回転検出器と、
前記軸受の振動を検出するための振動検出器と、
前記振動検出器から出力される振動信号をA/D変換するA/D変換器と、
前記A/D変換器の出力信号と前記軸受の回転速度とを基に演算処理をして前記軸受の異常診断を行う軸受診断処理手段とを備えた、前記軸受の異常を診断する異常診断装置において、
前記出力信号を処理して得られる値が、所定の振動検出器異常閾値よりも小さいときに、前記振動検出器の異常と診断する振動検出器診断処理手段を備えたことを特徴とする異常診断装置。
【請求項2】
前記出力信号を処理して得られる値が、前記出力信号に含まれる所定の周波数帯域のスペクトル強度の平均値であることを特徴とする請求項1に記載の異常診断装置。
【請求項3】
前記出力信号を処理して得られる値が、前記出力信号の実効値であることを特徴とする請求項1に記載の異常診断装置。
【請求項4】
前記所定の振動検出器異常閾値が前記軸受の回転速度から導かれるものであることを特徴とする請求項1乃至3のいずれかに記載の異常診断装置。
【請求項5】
前記所定の振動検出器異常閾値が予め設定した固定値であることを特徴とする請求項1乃至3のいずれかに記載の異常診断装置。
【請求項6】
さらに前記軸受の温度を検出する温度検出器を備え、検出された温度が所定の閾値を超えたときに、前記軸受診断処理手段が前記軸受の異常と診断することを特徴とする請求項1乃至5のいずれかに記載の異常診断装置。
【請求項1】
軸受の回転速度を検出するための回転検出器と、
前記軸受の振動を検出するための振動検出器と、
前記振動検出器から出力される振動信号をA/D変換するA/D変換器と、
前記A/D変換器の出力信号と前記軸受の回転速度とを基に演算処理をして前記軸受の異常診断を行う軸受診断処理手段とを備えた、前記軸受の異常を診断する異常診断装置において、
前記出力信号を処理して得られる値が、所定の振動検出器異常閾値よりも小さいときに、前記振動検出器の異常と診断する振動検出器診断処理手段を備えたことを特徴とする異常診断装置。
【請求項2】
前記出力信号を処理して得られる値が、前記出力信号に含まれる所定の周波数帯域のスペクトル強度の平均値であることを特徴とする請求項1に記載の異常診断装置。
【請求項3】
前記出力信号を処理して得られる値が、前記出力信号の実効値であることを特徴とする請求項1に記載の異常診断装置。
【請求項4】
前記所定の振動検出器異常閾値が前記軸受の回転速度から導かれるものであることを特徴とする請求項1乃至3のいずれかに記載の異常診断装置。
【請求項5】
前記所定の振動検出器異常閾値が予め設定した固定値であることを特徴とする請求項1乃至3のいずれかに記載の異常診断装置。
【請求項6】
さらに前記軸受の温度を検出する温度検出器を備え、検出された温度が所定の閾値を超えたときに、前記軸受診断処理手段が前記軸受の異常と診断することを特徴とする請求項1乃至5のいずれかに記載の異常診断装置。
【図1】

【図2】
【図3】
【図4】
【図2】
【図3】
【図4】
【公開番号】特開2008−134115(P2008−134115A)
【公開日】平成20年6月12日(2008.6.12)
【国際特許分類】
【出願番号】特願2006−319562(P2006−319562)
【出願日】平成18年11月28日(2006.11.28)
【出願人】(000004204)日本精工株式会社 (8,378)
【Fターム(参考)】
【公開日】平成20年6月12日(2008.6.12)
【国際特許分類】
【出願日】平成18年11月28日(2006.11.28)
【出願人】(000004204)日本精工株式会社 (8,378)
【Fターム(参考)】
[ Back to top ]