
異物検出装置
【課題】光軸のずれを容易に把握することが可能な異物検出装置を提供する。
【解決手段】微小異物検出装置Sはレーザ光を出射可能な投光ユニット30、受光面41Aに撮像素子を行列状に配した受光部41を有する受光カメラ40、並びにコントローラ50から構成される。コントローラ50はCPU51、制御回路53、フレームメモリ55、RAM56、ROM57等より構成される。CPU50は、予め検出エリアA1の画像データに基づく基準データをRAM56に記憶しておき、判定時に、検出エリアA1の画像データに基づく検出データを基準データと比較することで、光軸のずれの有無を判定する。光軸にずれがあると判定された場合には外部に報知されるため、作業者が光軸にずれが生じたことを容易に把握することができる。
【解決手段】微小異物検出装置Sはレーザ光を出射可能な投光ユニット30、受光面41Aに撮像素子を行列状に配した受光部41を有する受光カメラ40、並びにコントローラ50から構成される。コントローラ50はCPU51、制御回路53、フレームメモリ55、RAM56、ROM57等より構成される。CPU50は、予め検出エリアA1の画像データに基づく基準データをRAM56に記憶しておき、判定時に、検出エリアA1の画像データに基づく検出データを基準データと比較することで、光軸のずれの有無を判定する。光軸にずれがあると判定された場合には外部に報知されるため、作業者が光軸にずれが生じたことを容易に把握することができる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、微小な異物を検出する異物検出装置に関する。
【背景技術】
【0002】
近年、大型テレビのLCDパネルに用いるガラス基板に付着した微少な異物を検出する場合などに用いられる様々な異物検出装置が提案されている。例えば、特許文献1に記載のものは、半導体レーザ素子から出射された光をポリゴンミラーによってガラス基板上に光走査させ、ガラス基板上の異物にあたって生じる乱反射光を光ファイバ束で捕捉し、これを光電素子で光電変換することで異物を検出する構成となっている。
【特許文献1】特開平6−258230号公報(第1図)
【発明の開示】
【発明が解決しようとする課題】
【0003】
こうした異物検出装置において、図16に示すように、レーザ光源1とそれから出射されるレーザ光を受光する撮像器2とを対向配置し、撮像器2が出力する画像データに基づいて異物の検出を行う構成のものが提案されている。このような異物検出装置を使用する際に、例えばメンテナンス中に工具がレーザ光源1や撮像器2にぶつかるなどして、レーザ光源1等が移動し、レーザ光の光軸が初期の位置からずれてしまうことが起こり得る。
【0004】
このとき、光軸が大きくずれて撮像器2の受光領域から完全に外れた場合には、検出動作が全く行われないため、作業者が直ぐに装置の異常を把握して適切に対処することができる。しかしながら、光軸のずれが僅かであって光軸が撮像器2の受光領域から外れないような場合には、検出動作自体は行われるため、作業者が光軸のずれに気付かずに、異物の検出が全くできないか、あるいは検出精度が著しく低下した状態のままで、装置が使用されてしまうおそれがある。
【0005】
本発明は上記のような事情に基づいて完成されたものであって、光軸のずれを容易に把握することが可能な異物検出装置を提供することを目的とする。
【課題を解決するための手段】
【0006】
上記の目的を達成するための手段として、請求項1の発明に係る異物検出装置は、異物に照射された光の回折現象によって生ずる回折縞を利用して、対象物上の異物を検出する異物検出装置であって、前記対象物の両側において光軸が前記対象物の検出面に沿うように対向配置されるレーザ照射手段、及び前記レーザ照射手段から照射された光を撮像面上に受光して画像データを出力する撮像手段からなる二次元画像データ取得手段と、前記撮像手段の撮像面のうちの検出領域の画像データにおける回折縞に変化に基づいて前記検出面上の異物の検出を行う検出手段と、前記二次元画像データ取得手段により出力された画像データに基づく基準データを記憶する記憶手段と、前記記憶手段による前記基準データの記憶より後に前記二次元画像データ取得手段により出力された画像データに基づく検出データと、前記記憶手段に記憶された前記基準データとを比較して、前記レーザ照射手段及び前記撮像手段間における前記光軸のずれの有無を判定する判定手段と、前記判定手段において、前記光軸のずれが有ると判定された場合に外部へ報知する報知手段と、を備えている。
【0007】
請求項2の発明は、請求項1に記載のものにおいて、前記記憶手段は、前記検出領域の画像データに基づく基準データを記憶し、前記判定手段は、前記検出領域の画像データに基づく検出データと、前記基準データとを比較して前記光軸のずれの有無を判定する。
【0008】
請求項3の発明は、請求項2に記載のものにおいて、前記記憶手段は、前記検出領域における受光量の総和を前記基準データとして記憶し、前記判定手段は、前記検出領域における受光量の総和を前記検出データとして、前記基準データと比較することで前記光軸のずれの有無を判定する。
【0009】
請求項4の発明は、請求項2に記載のものにおいて、前記記憶手段は、前記検出領域における受光スポットの重心位置を前記基準データとして記憶し、前記判定手段は、前記検出領域における受光スポットの重心位置を前記検出データとして、前記基準データと比較することで前記光軸のずれの有無を判定する。
【0010】
請求項5の発明は、請求項2に記載のものにおいて、前記記憶手段は、前記検出領域における受光量が最大となる位置を前記基準データとして記憶し、前記判定手段は、前記検出領域における受光量が最大となる位置を前記検出データとして、前記基準データと比較することで前記光軸のずれの有無を判定する。
【0011】
請求項6の発明は、請求項1から請求項5のいずれかに記載のものにおいて、前記検出領域は、前記撮像面上における一方向に長い第1領域と、その第1領域に直交する方向に長い第2領域とを有しており、前記判定手段は、前記第1領域と前記第2領域とのそれぞれについて前記基準データと前記検出データとの比較を行うとともに、前記第1領域と前記第2領域とのうち少なくとも一方において、前記基準データと前記検出データとの間に基準以上の差異があった場合に光軸のずれが有ると判定する。
【0012】
請求項7の発明は、請求項1から請求項6のいずれかに記載のものにおいて、前記検出手段は、前記レーザ照射手段の光軸と直交する方向に、前記二次元画像データ取得手段あるいは前記対象物の少なくともいずれか一方を移動させ、移動前後の画像データにおける回折縞の変化に基づいて前記検出面上の異物の検出を行うものであって、前記判定手段は、前記検出手段による検出に先立って、前記二次元画像データ取得手段あるいは前記対象物の少なくともいずれか一方を静止させた状態で、前記検出データと前記基準データとを比較して、前記光軸のずれの有無を判定するよう構成されている。
【発明の効果】
【0013】
<請求項1の発明>
予め画像データに基づく基準データを記憶しておき、判定時に、画像データに基づく検出データを記憶された基準データと比較することで、光軸のずれの有無を判定する。光軸にずれがあると判定された場合には外部に報知されるため、作業者が光軸にずれが生じたことを容易に把握することができる。
【0014】
<請求項2の発明>
画像データの全画素に対して判定の処理を行うと解析の対象となるデータ数が多くなり処理に時間がかかるが、検出領域の画像データのみに対して判定の処理を行うことで処理を短時間で行うことができる。
【0015】
<請求項3の発明>
検出領域における受光量の総和を基準データと検出データとの間で比較することにより、光軸のずれの有無を判定することができる。
【0016】
<請求項4の発明>
受光スポットの重心位置を基準データと検出データとの間で比較することにより、光軸のずれの有無を判定することができる。
【0017】
<請求項5の発明>
受光量が最大となる位置を基準データと検出データとの間で比較することにより、光軸のずれの有無を判定することができる。
【0018】
<請求項6の発明>
検出領域が縦方向に長い第1領域と横方向に長い第2領域とからなり、第1領域と第2領域との少なくとも一方において、基準データと検出データとの間で基準以上の差異があった場合に光軸のずれが有ると判定するため、判定の精度を高めることができる。
【0019】
<請求項7の発明>
異物の検出処理を行う前に光軸ずれの判定を行うため、異物検出処理時における演算処理の負荷の増大を回避することができる。
【発明を実施するための最良の形態】
【0020】
<実施形態1>
本発明の実施形態1を図1ないし図12を参照して説明する。
本実施形態は、本発明に係る異物検出装置を、ガラス基板(本発明の対象物に相当)上の微小異物(例えば、ガラス片)を検出する微小異物検出装置Sに適用したものである。
【0021】
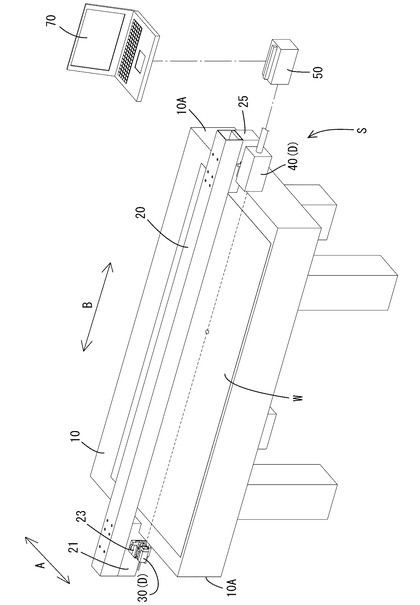
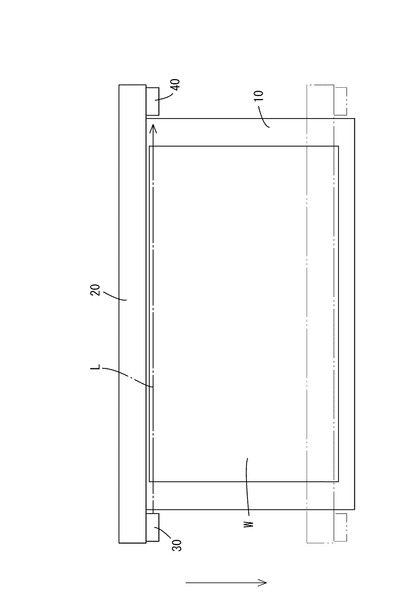
図1における、符号10はワーク載置台、符号Wは検査対象のガラス基板である。ワーク載置台10には、同載置台10の長手方向(同図のB方向)に延びるスライダ20が設けられている。このスライダ20の両端部には、L字状の治具21、25が固定されており、これが載置台10の端面部10Aに若干の隙間を持って嵌めあわされている。これにより、図示しない駆動装置を駆動させると、治具21、25と載置台10の嵌合部分が摺動面となって、図1に示す矢印A方向にスライダ20が進退するようになっている。
【0022】
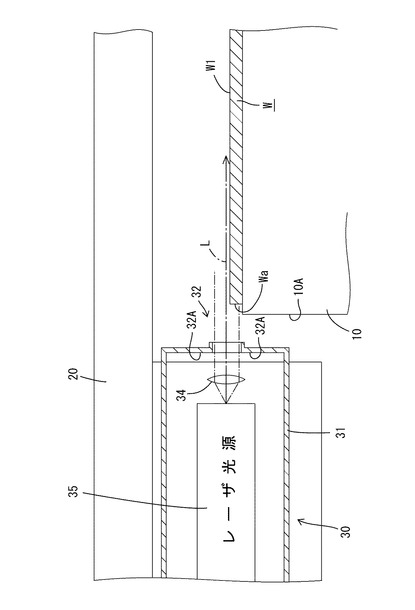
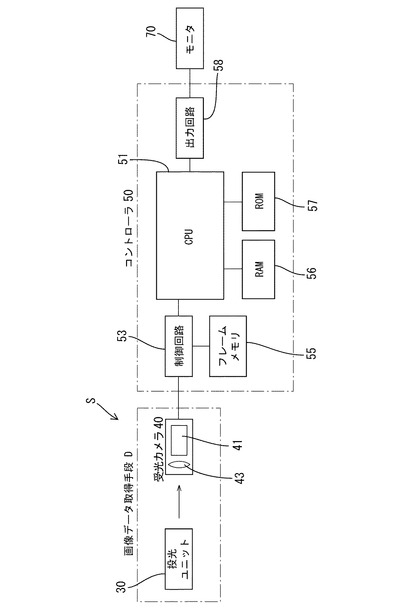
微小異物検出装置Sはレーザ光を出射可能な投光ユニット(本発明のレーザ照射手段に相当)30、撮像面41Aに撮像素子(以下、画素ともいう)を行列状に配した受光部41を有する受光カメラ(本発明の撮像手段に相当)40からなる二次元画像データ取得手段D、並びにコントローラ50から構成される。投光ユニット30は、図2に示すように、ケーシング31内にレーザ光源35、並びにコリメートレンズ34を収容してなる。ケーシング31の前面(図2における右側の面)には、円形のレーザ出射口32が開口しており、そこより、レーザ光、すなわちレーザ光源35から出射されコリメートレンズ34で平行光とされた光が出射されるようになっている。この投光ユニット30は、図1における左側の治具21の側面に固定されるが、治具側には投光ユニット30の上下方向に関する位置を調整可能な調整機構23が設けられている。
【0023】
図2に示すように、投光ユニット30は、レーザ出射口32の中心位置(光軸L)が上下方向においてガラス基板Wの上面W1(本発明の検出面に相当)とほぼ同じ高さとなるように調整機構23によって位置調整されている。換言すれば、レーザ出射口32の下半分がガラス基板Wの端面Waに対向し、それ以外の部分がガラス基板Wの上面側に露出される配置としてある。係る配置とすることで、投光ユニット30から出射されたレーザ光のうちの、中心部分の光が、ガラス基板W上の異物に対して照射されることとなる。
【0024】
一方、受光カメラ40は、図1における右側の治具25の側面において投光ユニット30と対向する位置に固定されている。これら、投光ユニット30と受光カメラ40は、スライダ20と一体的に移動するようになっている。また、受光カメラ40と次述するコントローラ50との間が信号線を通じて接続されている。また、同図に示す符号70はモニタである。
【0025】
次に、図3を参照して、コントローラ50の電気的構成について説明する。
【0026】
コントローラ50は、CPU(本発明の検出手段、判定手段に相当)51、制御回路53、フレームメモリ55、RAM56(本発明の記憶手段に相当)、ROM57並びに、出力回路58(本発明の報知手段に相当)より構成される。フレームメモリ55は、受光カメラ40で撮像された画像データを記憶するためのものであり、制御回路53はCPU51からの指令に基づいてフレームメモリ55に画像データを記憶させたり、或いはフレームメモリ55から画像データの読み出しを行うものである。出力回路58は、CPU51からの指令に基づいてモニタ70に対し検出結果や光軸ずれの警告等を表示させための出力を行う。
【0027】
ROM57には、画像データを解析するための各種プログラムが格納されており、これがRAM56上の所定領域に読み出されてCPU51により実行される。また、RAM56にはプログラムが読み出される領域の他に、CPU51が処理を行う際に、データを一時記憶しておくための領域が設けられている。
【0028】
また、同図には示されていないが、受光カメラ40は液晶シャッターを備えている。液晶シャッターは、CPU51の指令に基づいて制御回路53から出力されるシャッター開閉指令を受けて動作して、受光カメラ40の撮像面41Aを開閉する。尚、同図に示す符号43はレンズであり、受光カメラ40の撮像面41Aに適切な大きさの画像を投影させるものである。
【0029】
次に、具体的な検出動作について説明する。
検出が開始されると、まず、スライダ20の位置が、図4に示す初期位置にセットされ、その後、投光ユニット30からレーザ光の照射が開始される。続いて、駆動装置の駆動が開始されて、スライダ20は図4の下方に向けてゆっくりと水平移動してゆく。これにより、投光ユニット30と受光カメラ40から構成される二次元画像データ取得手段Dもスライダ20とともに、一体的に移動する。
【0030】
この間、CPU51からは、シャッター開閉指令が所定周期で受光カメラ40に送られることで、撮影が行なわれる。そして、撮影が行なわれるたびに、制御回路53によって受光カメラ40から画像データが読み出され、これが、フレームメモリ55に記憶されるようになっている。
【0031】
かくして、フレームメモリ55には、ガラス基板Wの一端(図4における左側)から出射された後、ガラス基板Wの上面に沿って水平に進み、ガラス基板Wの他端(図4における右側)に達したレーザ光を受光した各時点の画像データが保持される。そして、CPU51では、画像データの取得と並行して、保持された画像データの画像解析が行なわれる。
【0032】
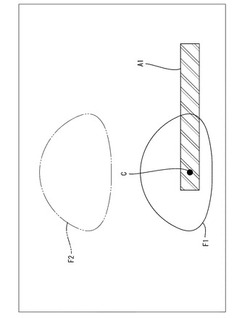
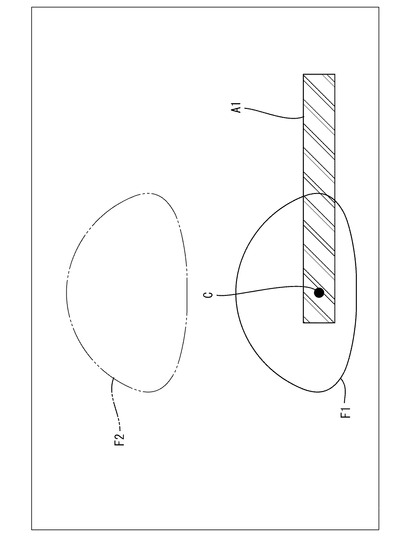
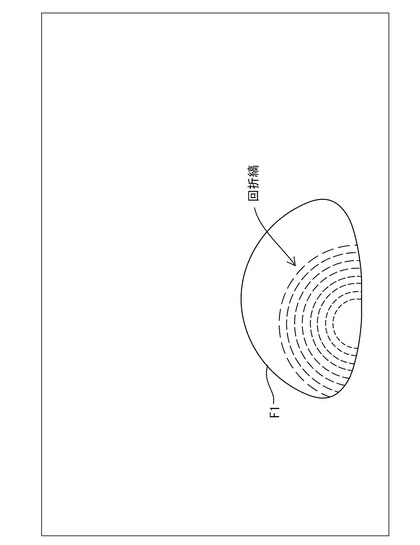
ここで、画像解析に先立って、取得された画像データについて説明する。図5は、ガラス基板W上に異物がない場合に受光カメラ40によって撮像された画像を例示している。同図のF1は、レーザ光源35から出射された後、直進した光が入光した受光スポットを示しており、基本的には、当該部分からは信号レベルの高い撮像信号が出力される。すなわち、入光部分では受光される光量が高く、これとは、反対にそれ以外の部分では低くなる。
【0033】
ところが、光量の高い領域部分、或いは低い領域部分について、更に、光量の分布を細かくみると、受光された各点の光量は一定でなく、受光される光量が特に高い部分とそれに比べて弱い部分とがある(図示せず)。このように光量の分布に斑が生ずる一つの要因に、レーザ光の回折現象がある。レーザ光の回折現象はレーザ光の進行が、障害物によって遮られるときに、レーザ光が障害物を回りこむ、換言すれば、光の直進性がわずかに崩れる現象であり、これにより、撮像面41A上に回折縞が現れるためである。
【0034】
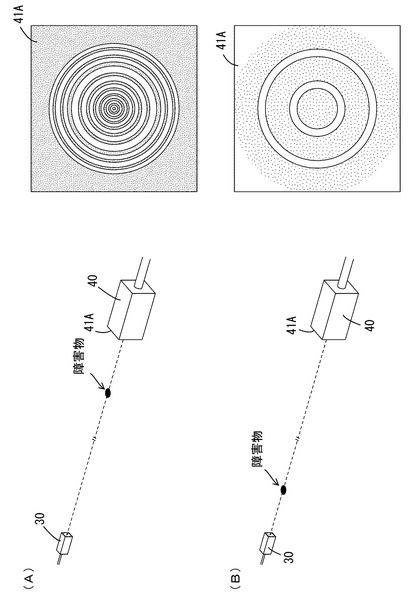
図6は、撮像面41Aと障害物との間の距離と、回折縞の模様との関係を示したものであるが、一般に、撮像面41Aに障害物が近いほど空間周波数uの高い回折縞が現れ、これとは反対に、撮像面41Aに障害物が遠いほど空間周波数uの低い回折縞が現れる。
【0035】
本実施形態であれば、レーザ光を遮る障害物にはガラス基板W上の異物に加えて、図2に示すようにレーザ光源35に近い側にレーザ出射口32の口縁部32Aがあり、更に、ガラス基板Wの端面Waも障害物となるから、図5に示す画像データ中には、これらによって生じた異なる空間周波数uの回折縞(図示せず)が混在した状態となる。尚、空間周波数uとは、画像データ中における濃淡(光度の強弱)の周期であり、空間周波数uが高いほど濃淡を繰り返す周期が短く(縞の間隔が短く)、これとは反対に空間周波数uが低いほど濃淡を繰り返す周期が長く(縞の間隔が広く)なる。
【0036】
また、受光カメラ40の撮像面41A全体から得られる画像データのうち一部の領域が、予め解析の対象となる検出エリア(本発明の検出領域に相当)として指定されている。本実施形態では、図5に示すように、横方向に細長い所定の大きさの検出エリアA1が設けられている。
【0037】
このように、検出エリアの指定を行うのは、画像データの全画素に対して後述するFFT等の処理を行うと解析の対象となるデータ数が多くなり処理に時間がかかるから、解析の対象となるデータを必要最小限に留めるためであり、横方向に検出エリアを長くとっているのは、スライダ20が横方向に走査されるからである。
【0038】
また、本実施形態のものは、検出エリアA1内に受光中心Cが含まれるように投光ユニット30と受光カメラ40との相対位置が調整されている。受光中心Cというのは、受光スポットF1の中心であり、受光量が最大であるとともに、その周辺部の受光量が高く安定している。このように、受光量が高く安定した領域を検出エリアとして設定しておくことで、安定した検出が可能となる。
【0039】
仮に、受光量が低い領域を対象に検出エリアを設定してしまうと、レーザの出力状況によっては、指定した検出エリアの各画素の受光レベルが、受光カメラ40で信号として検出可能なレベルを下回ることもあり、これでは、安定した検出を行うことが出来なくなる。この点、上述のように、受光量が高く安定した領域をエリアとして予め指定しておけば、係る事態を未然に回避することが可能となる。
【0040】
さて、CPU51では、上述の画像データを解析することにより、以下に述べる異物検出処理と、光軸ずれ判定処理とを行う。
【0041】
(異物検出処理)
異物検出処理には、二つの段階、すなわち、取得された各時点の画像データに対してFFT(離散フーリエ変換)を行なって、各画像データのパワースペクトル分布を算出する第一段階と、第一段階で取得されたパワースペクトル分布の時間的な変化を検出し、これに基づいて異物検出を行う第二段階とがある。
【0042】
<第1段階>
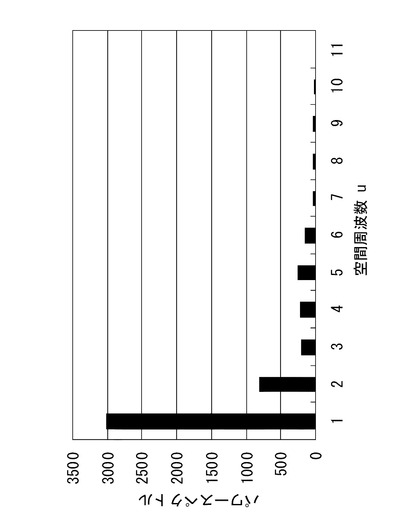
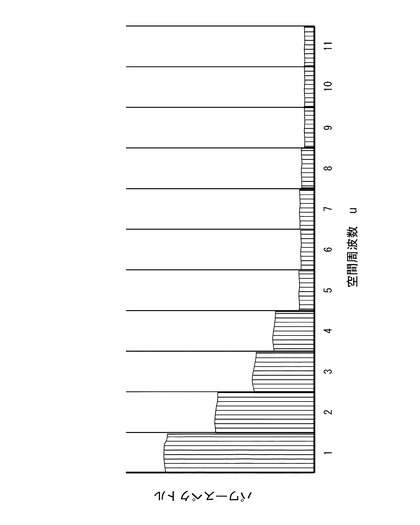
異物検出処理においては、CPU51は、まず検出エリアA1内の画像データを対象として、次述する(1)、(2)式に従って、公知のFFTを行って、パワースペクトル分布、すなわち、検出エリアA1内の画像データ中に、如何なる空間周波数の成分が、どの割合で含まれているのかを算出する。図7には、パワースペクトル分布の一例が示されているが、このものであれば、対象となった画像データ中に、空間周波周1の成分が最も多く含まれ、次いで空間周波数2の成分、次いで空間周波数3の成分が多く含まれていたこととなる。そして、CPU51は上記したパワースペクトル分布を各画像データごとに、それぞれ算出する。尚、CPU51がFFTを行なってパワースペクトル分布を算出する機能が、本発明の演算手段を果たす機能に相当する。
【0043】
【数1】

【数2】
u・・・・・・空間周波数
f(n)・・・画像データ(画素の光量)
F(u)・・・スペクトル
G(u)・・・パワースペクトル
【0044】
<第二段階>
CPU51は、上記した第一段階の処理を繰り返し行うことで所定数(例えば、10個)のパワースペクトル分布が得られると、今度はパワースペクトル値の時間的な変化の有無を、各空間周波数uについて、それぞれ算出する。具体的には、空間周波数1であれば、10個のパワースペクトル値がサンプリングされているから、まず、サンプリングされた10個の値からパワースペクトル値の平均を算出する。そして、得られた平均値を基準として各パワースペクトル値の増減値(絶対値)を算出し、これを設定された閾値と比較する。比較した結果、空間周波数1のパワースペクトル値の増減値がいずれも、閾値を下回っている場合には、空間周波数1について変化なしと判定する。
【0045】
そして、上記した増減値と閾値とを比較する処理を全ての空間周波数uについて行ない、全ての空間周波数uについて、増減値が閾値を下回っていれば、そのときには、異物なしとの判定を行う。これは、ガラス基板W上に異物がない場合には、同じ空間周波数uであれば、図8に示すように、パワースペクトル値はほぼ一定しており、ほとんど、変化が現れないからである。
【0046】
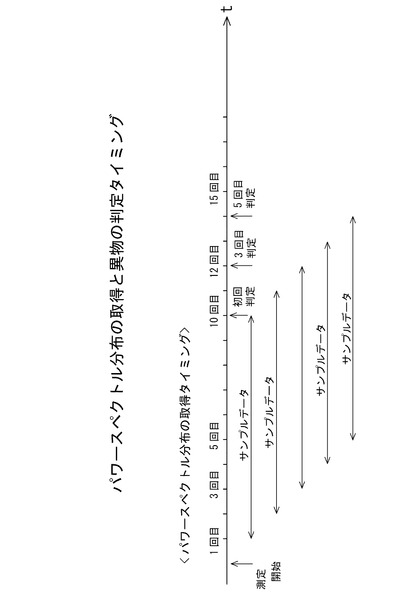
CPU51は、図9に示すように、10個のスペクトル分布がストックされるまで、初回の判定を行なわないが、そこで異物なしと判定した場合には、それ以降、新しいスペクトル分布が、前記した第一段階における処理で取得される都度、判定を行う。すなわち、新しい10個のパワースペクトル分布を対象(サンプルデータ)として、上記した平均値の算出を再び行い、その後、得られた平均値を基準として各パワースペクトル値の増減量を算出し、これを設定された閾値と比較する。このように、パワースペクトル分布の取得と同時に判定処理を行うことで、スライダ20によるレーザ光の走査(画像データの取得)と並行して、異物検出を行うことが出来る(初回検出を除く)。
【0047】
そして、スライダ20が、終端位置(図4に示す一点鎖線で示す位置)まで達し、レーザ光による光の走査がガラス基板Wの全面についておこなわれると、検出動作が完了する。
【0048】
一方、上記した第二段階の判定処理において、いずれかの空間周波数uについて、増減値が閾値を上回っている場合には、パワースペクトル分布に時間的な変化があったと判定されて、異物ありとされる。これは、ガラス基板W上に異物がある場合には、図10に示すように、異物により生じた回折縞が撮像面41A上に現れるから、これにより、パワースペクトル値の分布に変化が起きるためである。より具体的に言えば、発生した回折縞の空間周波数uに近い周波数帯(図11におけるC部)では、パワースペクトル値が大きくなる。
【0049】
そして、CPU51は異物ありと判定した場合には、出力回路58を通じて異物検出信号をモニタ70に出力して、モニタ70上に異物を検出した旨を表示させるとともに、これと並行して、光軸方向(図1におけるB方向)に関する異物の位置を検出するための処理を行う。また、出力回路58はスライダ20を駆動させる駆動装置にも接続されており、異物検出信号が出力されると、駆動装置がこれを受信してスライダ20の進退を停止させるようになっている。
【0050】
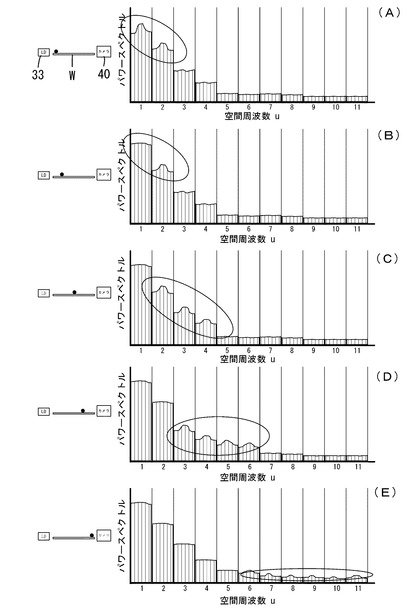
次に、異物の位置検出であるが、これは、予めROM57に記憶されているパワースペクトル分布の変化パターンと、検出されたパワースペクトル分布の変化パターンとを照合し、最も変化パターンの似通ったパワースペクトル分布を抽出することにより行なわれる。すなわち、本実施形態のものであれば、異物検出を行うに先立って、試験的にガラス基板W上に異物を置いた状態で上記した一連の処理を行ってパワースペクトル分布を取得しており、係る試験を、図12に示すように光軸方向に異物を移動させて、各位置においてそれぞれ行っている。これにより、例えば、図12の(A)から(E)の5つのパワースペクトル分布の変化パターンが取得されている(ROM57に記憶してある)。
【0051】
そして、CPU51は、現実の測定において、先の第二段階における判定処理で異物ありと判定すると、判定の対象となったパワースペクトル分布の変化パターンと、上記した5つのパワースペクトルの分布の変化パターンを照合する。すなわち、変化のあった空間周波数帯を比較する。
【0052】
先に述べたように、図11の例であれば、空間周波数uが2〜4の部分において特に、変化が現れている。一方、これと同じ周波数帯に変化が現れているものは、図12の(C)であるから、このときには、レーザ光源35と受光カメラ40のほぼ中間位置に異物があると判定され、その結果がモニタ70に表示される。尚、このように、光軸方向に関する異物の位置によって、変化が現れる周波数帯が異なるのは、図6に示すように、光軸方向に関する異物の位置によって、撮像面41Aに現れる回折縞の空間周波数uがそれぞれ、異なるためである。
【0053】
このように本実施形態の微小異物検出装置Sは、投光ユニット30、受光カメラ40並びにコントローラ50だけで構成されているから、部品点数が少なく、装置全体がコンパクトにまとめられている。また、異物の検出については、異物によって生じた回折縞に起因するパワースペクトル分布の時間的な変化に基づいて検出を行なっている。従って、ノイズ成分、並びに種々の空間周波数成分が混在する画像データの中から、異物に起因する画像の変化を適格に捉えることが可能となり、受光量変化に基づいて判定を行う場合(図16の構成のもの)に比べて、信頼性の高い検出結果を得ることが出来る。
【0054】
また、異物の有無についての判定は、スライダ20の移動(レーザ光による走査)と並行して行なわれ、異物ありと判定された場合には、その場でスライダ20が停止されるようになっているから、単に、異物の検出のみを行うものに比べて、更に、商品性が高くなっている。加えて、コントローラ50のROM57には、予め、パワースペクトル分布の変化パターンが記憶されており、これと異物ありと判定されたパワースペクトル分布を比較することで、光軸方向に関する異物の位置を特定することが出来るようになっている。このような構成であれば、ガラス基板W上における異物の位置を容易に特定することが可能となるから、より一層、商品性に優れるものとなる。
【0055】
(光軸ずれ判定処理)
次にレーザ光源35と受光カメラ40との間の光軸のずれを判定するための光軸ずれ判定処理について説明する。まず、この光軸ずれ判定処理を行うに先立って、基準データの検出が行われる。本実施形態では、この基準データは、CPU51が、異物が付着していない状態において受光カメラ40より出力された画像データに基づいて、検出エリアA1内の各画素についての受光量の総和を算出することで得られ、その算出された数値はRAM56上に記憶される。受光量の総和は、具体的には、例えば、各画素の受光量レベルが所定レベル以上であるときには1、そうでないときには0として、検出エリアA1内の全ての画素についてその和を求めることで得られる。
【0056】
光軸ずれ判定処理は、例えば、スライダ20が前述の初期位置にセットされたときに、上記異物検出処理を実行するよりも前に行われる。そのため、異物検出処理時における演算処理の負荷の増大を回避することができる。CPU51は、光軸ずれ判定処理を開始すると、スライダ20が初期位置にある状態で受光カメラ40より出力された画像データに基づき、検出エリアA1内の各画素について受光量の総和を求めることで検出データを得る。そして、その検出データを先の基準データと比較する。
【0057】
ここで、レーザ光源35及び受光カメラ40のスライダ20に対する取付位置(取付姿勢)が調整時のままであった場合には、検出データの受光スポットF1の位置は、基準データの受光スポットとほぼ同じであり、受光量の総和もほとんど変化しない。これに対し、レーザ光源35若しくは受光カメラ40がスライダ20に対して移動した場合には、光軸のずれが生じて、検出データの受光スポットの位置が基準データの受光スポットの位置からずれる事態が生じ得る。例えば、図5の受光スポットF2は、光軸が上下方向にずれた場合を例示している。このとき、検出エリアA1内の各画素についての受光量の総和は、大きく変化する。
【0058】
CPU51は、検出データと基準データとを比較して、その受光量の総和の変化が所定の閾値未満である場合には、光軸のずれは無いと判定して、続いて異物検出処理を実行し、閾値以上である場合には、光軸にずれが有ると判定して、出力回路58を介してモニタ70に報知信号を出力する。これにより、モニタ70には光軸にずれがある旨を示す表示がなされる。なお、出力回路58から報知信号を出力した際には、モニタ70に付随するスピーカ(図示せず)から警告音を鳴らすようにしても良い。
【0059】
以上のように本実施形態によれば、予め検出エリアA1の画像データに基づく基準データを記憶しておき、判定時に、検出エリアA1の画像データに基づく検出データを記憶された基準データと比較することで、光軸のずれの有無を判定する。光軸にずれがあると判定された場合には外部に報知されるため、作業者が光軸にずれが生じたことを容易に把握することができる。
【0060】
また、画像データの全画素に対して判定の処理を行うと解析の対象となるデータ数が多くなり処理に時間がかかるが、検出領域の画像データのみに対して判定の処理を行うことで処理を短時間で行うことができる。
【0061】
また、検出エリアA1における受光量の総和を基準データと検出データとの間で比較することにより、光軸のずれの有無を判定することができる。
【0062】
また、異物の検出処理を行う前に光軸ずれの判定を行うため、異物検出処理時における演算処理の負荷の増大を回避することができる。
【0063】
<実施形態2>
次に本発明の実施形態2について図13及び図14を参照して説明する。
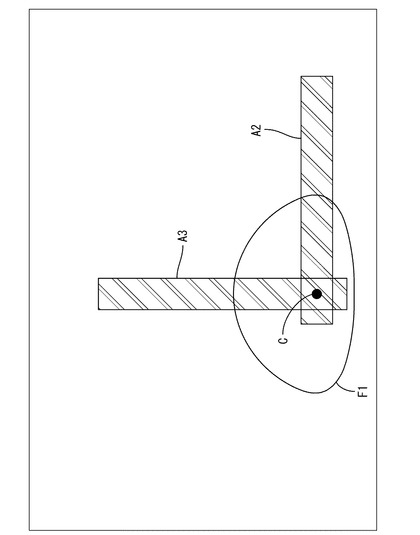
実施形態1では、図5に示す一つの検出エリアA1をFFTの対象としたが、この実施形態では、図13に示すように、FFTの対象となる検出エリアを横方向に延びる第1の検出エリアA2と、縦方向に延びる第2の検出エリアA3(ともに本発明の検出領域に相当)との2つ設けている。このように2つの検出エリアA2,A3を設けているのは、ガラス基板Wの上面に異物が付着している場合と、ガラス基板Wの裏面に異物が付着している場合の双方の場合について、検出を可能とするためである。
【0064】
具体的に説明すると、本実施形態では、受光カメラ40の撮像面41A上に現れる回折縞に着目して、異物の有無を判別している。回折縞は、干渉物がある場合にレーザ光が回折現象を起こすことに起因して現れるが、現れる縞模様は干渉物の形状に倣う傾向がある。
【0065】
すなわち、異物がガラス基板Wの上面にある場合であれば、異物によってレーザ光の進行が妨げられるので、異物そのものが干渉物になり、この場合には、異物の形状に倣った縞模様の回折縞が現れる。例えば、異物が球状であれば、受光カメラ40の撮像面41A上に、図6に示すような同心円状の縞模様の回折縞が現れる。
【0066】
これに対して、異物がガラス基板Wの下面にある場合であれば、異物に乗り上げて湾曲したガラス基板Wによってレーザ光の進行が妨げられるので、湾曲したガラス基板Wが干渉物となる。その結果、回折縞の模様はガラスWの上面に倣った模様、即ち横方向に緩やな湾曲をなす曲線が、縦方向に重なる縞模様となる。
【0067】
出願人の知見によれば、図6に示すような同心円状の回折縞に対しては、第1の検出エリアA2を対象に画像解析を行うと回折縞の出現を高精度に検出出来る傾向があり、また、横方向に緩やな湾曲をなす曲線状の回折縞に対しては、第2の検出エリアA3を対象に画像解析を行うと回折縞の出現を高精度に検出出来る傾向にある。
【0068】
また、各検出エリアA2,A3は、図13に示すように、いずれも受光中心Cに重なるように設定してあるため、安定した検出が可能となる。
【0069】
(光軸ずれ判定処理)
次に本実施形態の光軸ずれ判定処理について説明する。まず、この光軸ずれ判定処理を行うに先立って、基準データの測定が行われる。本実施形態では、この基準データは、各検出エリアA2,A3内においてそれぞれ受光量が最大となる画素の位置であり、即ちここではともに受光中心Cの位置が基準データとしてRAM56上に記憶される。
【0070】
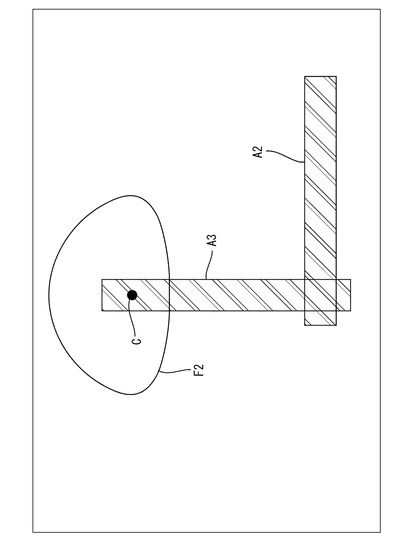
CPU51は、光軸ずれ判定処理を開始すると、スライダ20が初期位置にある状態で受光カメラ40より出力された画像データに基づき、各検出エリアA2,A3内の受光量が最大となる画素の位置をそれぞれ検出データとして求め、それらを基準データと比較する。ここで、レーザ光源35及び受光カメラ40のスライダ20に対する取付位置(取付姿勢)が調整時のままであった場合には、受光量が最大となる画素位置はほとんど変化しないが、例えば、図14に示すように、光軸にずれが生じて、受光スポットの位置がF2へずれた場合には、受光量が最大となる画素位置が大きく変化する。
【0071】
CPU51は、各検出エリアA2,A3について、それぞれ検出データと基準データとを比較して、その受光量が最大となる画素位置の変化が所定の閾値以上であるか否かを調べる。そして、検出エリアA2,A3の両方について画素位置の変化が閾値以下であった場合には、光軸のずれは無いと判定して、続いて異物検出処理を実行し、少なくともいずれか一方の検出エリアA2,A3について、画素位置の変化が閾値以上であった場合には、光軸にずれが有ると判定して、出力回路58を介してモニタ70に報知信号を出力する。これにより、モニタ70には光軸にずれがある旨を示す表示がなされる。
【0072】
以上のように本実施形態によれば、受光量が最大となる位置を基準データと検出データとの間で比較することにより、光軸のずれの有無を判定することができる。
【0073】
また、検出エリアが横方向に長い第1の検出エリアA2と縦方向に長い第2の検出エリアA3とからなり、両検出エリアA2,A3の少なくとも一方において、基準データと検出データとの間で基準以上の差異があった場合に光軸のずれが有ると判定するため、判定の精度を高めることができる。
【0074】
<実施形態3>
次に本発明の実施形態3について図15を参照して説明する。
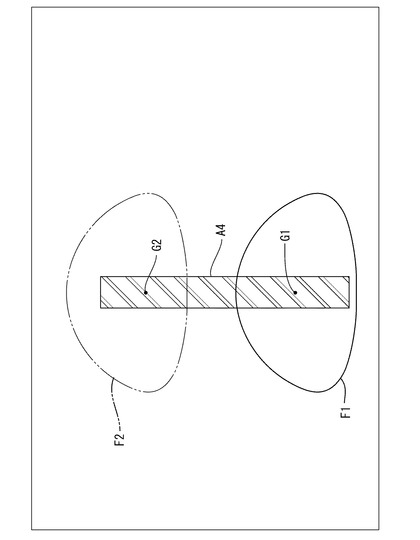
本実施形態では、FFTの対象となる検出エリアとして縦方向に延びる1つの検出エリアA4を一つ設けている。本実施形態では、光軸ずれ判定処理を行うに先立って、まず、検出エリアA4内における受光スポットの重心位置を求め、その重心位置を基準データとしてRAM56上に記憶させる。本発明でいう重心位置とは、いわゆる面積重心位置、若しくは体積重心位置であり、それぞれ次の数式によって求めることができる。
【0075】
<面積重心位置>
面積重心位置={Σ(MI)/ΣM}
I:受光部41の撮像面41A上における、検出エリアA4内の各画素の位置ベクトル
M:上記各画素の受光量レベルが所定レベル以上であるときには例えば1、そうでないときには0
【0076】
<体積重心位置>
体積重心位置={Σ(mI)/Σm}
I:上記面積重心位置の場合と同じ
m:上記各画素の受光量レベルに応じた係数
【0077】
CPU51は、光軸ずれ判定処理を開始すると、受光カメラ40より出力された画像データに基づき、検出エリアA4内の重心位置を検出データとして求め、それを基準データと比較する。ここで、レーザ光源35及び受光カメラ40のスライダ20に対する取付位置(取付姿勢)が調整時のままであった場合には、重心位置が初期の位置G1からほとんど変化しないが、図15に示すように、光軸にずれが生じて受光スポットがF2に移動した場合には、重心位置がG2に移る。
【0078】
そして、CPU51は、重心位置の変化が所定の閾値以下であった場合には、光軸のずれは無いと判定して、続いて異物検出処理を実行し、重心位置の変化が閾値以上であった場合には、光軸にずれが有ると判定して、出力回路58を介してモニタ70に報知信号を出力する。これにより、モニタ70には光軸にずれがある旨を示す表示がなされる。
【0079】
以上のように本実施形態によれば、受光スポットの重心位置を、基準データと検出データとの間で比較することにより、光軸のずれの有無を判定することができる。
【0080】
<他の実施形態>
本発明は上記記述及び図面によって説明した実施形態に限定されるものではなく、例えば次のような実施形態も本発明の技術的範囲に含まれる。
(1)上記実施形態では、微小異物検出装置Sをガラス基板W上の異物検出に適用したが、用途はガラス基板等に限定されるものではなく、金属板上の異物検出等に適用してもよい。
【図面の簡単な説明】
【0081】
【図1】本発明の実施形態1に係る微小異物検出装置の概観構成を示す斜視図
【図2】投光ユニットのレーザ光の光軸と、ガラス基板上との関係(上下方向の位置関係)を示す図
【図3】検出装置の電気的構成を示すブロック図
【図4】スライダの初期位置、並びに終端位置を示す平面図
【図5】受光カメラの受光画像(画像データ)を示す図
【図6】異物の位置により回折縞の模様が変わる様子を示す図
【図7】画像データをFFTした結果(パワースペクトル分布)を示す図
【図8】パワースペクトル分布の時間的な推移を示す図
【図9】CPUによる異物の判定タイミングを示す図
【図10】ガラス基板上に異物があった場合の画像データを示す図
【図11】パワースペクトル分布の時間的な推移に変化のあった状態を示す図
【図12】パワースペクトル分布の変化パターンを示す図
【図13】実施形態2において光軸のずれがない状態での受光カメラの受光画像(画像データ)を示す図
【図14】実施形態2において光軸のずれが生じた状態での受光カメラの受光画像(画像データ)を示す図
【図15】実施形態3における受光カメラの受光画像(画像データ)を示す図
【図16】従来例を示す図
【符号の説明】
【0082】
S…微小異物検出装置
D…二次元画像データ取得手段
30…投光ユニット(レーザ照射手段)
40…受光カメラ(撮像手段)
41A…撮像面
50…コントローラ
51…CPU(検出手段、判定手段)
56…RAM(記憶手段)
58…出力回路(出力手段)
A1〜A4…検出エリア(検出領域)
C…受光中心(受光量が最大となる位置)
G1,G2…重心位置
W…ガラス基板(対象物)
W1…上面(検出面)
【技術分野】
【0001】
本発明は、微小な異物を検出する異物検出装置に関する。
【背景技術】
【0002】
近年、大型テレビのLCDパネルに用いるガラス基板に付着した微少な異物を検出する場合などに用いられる様々な異物検出装置が提案されている。例えば、特許文献1に記載のものは、半導体レーザ素子から出射された光をポリゴンミラーによってガラス基板上に光走査させ、ガラス基板上の異物にあたって生じる乱反射光を光ファイバ束で捕捉し、これを光電素子で光電変換することで異物を検出する構成となっている。
【特許文献1】特開平6−258230号公報(第1図)
【発明の開示】
【発明が解決しようとする課題】
【0003】
こうした異物検出装置において、図16に示すように、レーザ光源1とそれから出射されるレーザ光を受光する撮像器2とを対向配置し、撮像器2が出力する画像データに基づいて異物の検出を行う構成のものが提案されている。このような異物検出装置を使用する際に、例えばメンテナンス中に工具がレーザ光源1や撮像器2にぶつかるなどして、レーザ光源1等が移動し、レーザ光の光軸が初期の位置からずれてしまうことが起こり得る。
【0004】
このとき、光軸が大きくずれて撮像器2の受光領域から完全に外れた場合には、検出動作が全く行われないため、作業者が直ぐに装置の異常を把握して適切に対処することができる。しかしながら、光軸のずれが僅かであって光軸が撮像器2の受光領域から外れないような場合には、検出動作自体は行われるため、作業者が光軸のずれに気付かずに、異物の検出が全くできないか、あるいは検出精度が著しく低下した状態のままで、装置が使用されてしまうおそれがある。
【0005】
本発明は上記のような事情に基づいて完成されたものであって、光軸のずれを容易に把握することが可能な異物検出装置を提供することを目的とする。
【課題を解決するための手段】
【0006】
上記の目的を達成するための手段として、請求項1の発明に係る異物検出装置は、異物に照射された光の回折現象によって生ずる回折縞を利用して、対象物上の異物を検出する異物検出装置であって、前記対象物の両側において光軸が前記対象物の検出面に沿うように対向配置されるレーザ照射手段、及び前記レーザ照射手段から照射された光を撮像面上に受光して画像データを出力する撮像手段からなる二次元画像データ取得手段と、前記撮像手段の撮像面のうちの検出領域の画像データにおける回折縞に変化に基づいて前記検出面上の異物の検出を行う検出手段と、前記二次元画像データ取得手段により出力された画像データに基づく基準データを記憶する記憶手段と、前記記憶手段による前記基準データの記憶より後に前記二次元画像データ取得手段により出力された画像データに基づく検出データと、前記記憶手段に記憶された前記基準データとを比較して、前記レーザ照射手段及び前記撮像手段間における前記光軸のずれの有無を判定する判定手段と、前記判定手段において、前記光軸のずれが有ると判定された場合に外部へ報知する報知手段と、を備えている。
【0007】
請求項2の発明は、請求項1に記載のものにおいて、前記記憶手段は、前記検出領域の画像データに基づく基準データを記憶し、前記判定手段は、前記検出領域の画像データに基づく検出データと、前記基準データとを比較して前記光軸のずれの有無を判定する。
【0008】
請求項3の発明は、請求項2に記載のものにおいて、前記記憶手段は、前記検出領域における受光量の総和を前記基準データとして記憶し、前記判定手段は、前記検出領域における受光量の総和を前記検出データとして、前記基準データと比較することで前記光軸のずれの有無を判定する。
【0009】
請求項4の発明は、請求項2に記載のものにおいて、前記記憶手段は、前記検出領域における受光スポットの重心位置を前記基準データとして記憶し、前記判定手段は、前記検出領域における受光スポットの重心位置を前記検出データとして、前記基準データと比較することで前記光軸のずれの有無を判定する。
【0010】
請求項5の発明は、請求項2に記載のものにおいて、前記記憶手段は、前記検出領域における受光量が最大となる位置を前記基準データとして記憶し、前記判定手段は、前記検出領域における受光量が最大となる位置を前記検出データとして、前記基準データと比較することで前記光軸のずれの有無を判定する。
【0011】
請求項6の発明は、請求項1から請求項5のいずれかに記載のものにおいて、前記検出領域は、前記撮像面上における一方向に長い第1領域と、その第1領域に直交する方向に長い第2領域とを有しており、前記判定手段は、前記第1領域と前記第2領域とのそれぞれについて前記基準データと前記検出データとの比較を行うとともに、前記第1領域と前記第2領域とのうち少なくとも一方において、前記基準データと前記検出データとの間に基準以上の差異があった場合に光軸のずれが有ると判定する。
【0012】
請求項7の発明は、請求項1から請求項6のいずれかに記載のものにおいて、前記検出手段は、前記レーザ照射手段の光軸と直交する方向に、前記二次元画像データ取得手段あるいは前記対象物の少なくともいずれか一方を移動させ、移動前後の画像データにおける回折縞の変化に基づいて前記検出面上の異物の検出を行うものであって、前記判定手段は、前記検出手段による検出に先立って、前記二次元画像データ取得手段あるいは前記対象物の少なくともいずれか一方を静止させた状態で、前記検出データと前記基準データとを比較して、前記光軸のずれの有無を判定するよう構成されている。
【発明の効果】
【0013】
<請求項1の発明>
予め画像データに基づく基準データを記憶しておき、判定時に、画像データに基づく検出データを記憶された基準データと比較することで、光軸のずれの有無を判定する。光軸にずれがあると判定された場合には外部に報知されるため、作業者が光軸にずれが生じたことを容易に把握することができる。
【0014】
<請求項2の発明>
画像データの全画素に対して判定の処理を行うと解析の対象となるデータ数が多くなり処理に時間がかかるが、検出領域の画像データのみに対して判定の処理を行うことで処理を短時間で行うことができる。
【0015】
<請求項3の発明>
検出領域における受光量の総和を基準データと検出データとの間で比較することにより、光軸のずれの有無を判定することができる。
【0016】
<請求項4の発明>
受光スポットの重心位置を基準データと検出データとの間で比較することにより、光軸のずれの有無を判定することができる。
【0017】
<請求項5の発明>
受光量が最大となる位置を基準データと検出データとの間で比較することにより、光軸のずれの有無を判定することができる。
【0018】
<請求項6の発明>
検出領域が縦方向に長い第1領域と横方向に長い第2領域とからなり、第1領域と第2領域との少なくとも一方において、基準データと検出データとの間で基準以上の差異があった場合に光軸のずれが有ると判定するため、判定の精度を高めることができる。
【0019】
<請求項7の発明>
異物の検出処理を行う前に光軸ずれの判定を行うため、異物検出処理時における演算処理の負荷の増大を回避することができる。
【発明を実施するための最良の形態】
【0020】
<実施形態1>
本発明の実施形態1を図1ないし図12を参照して説明する。
本実施形態は、本発明に係る異物検出装置を、ガラス基板(本発明の対象物に相当)上の微小異物(例えば、ガラス片)を検出する微小異物検出装置Sに適用したものである。
【0021】
図1における、符号10はワーク載置台、符号Wは検査対象のガラス基板である。ワーク載置台10には、同載置台10の長手方向(同図のB方向)に延びるスライダ20が設けられている。このスライダ20の両端部には、L字状の治具21、25が固定されており、これが載置台10の端面部10Aに若干の隙間を持って嵌めあわされている。これにより、図示しない駆動装置を駆動させると、治具21、25と載置台10の嵌合部分が摺動面となって、図1に示す矢印A方向にスライダ20が進退するようになっている。
【0022】
微小異物検出装置Sはレーザ光を出射可能な投光ユニット(本発明のレーザ照射手段に相当)30、撮像面41Aに撮像素子(以下、画素ともいう)を行列状に配した受光部41を有する受光カメラ(本発明の撮像手段に相当)40からなる二次元画像データ取得手段D、並びにコントローラ50から構成される。投光ユニット30は、図2に示すように、ケーシング31内にレーザ光源35、並びにコリメートレンズ34を収容してなる。ケーシング31の前面(図2における右側の面)には、円形のレーザ出射口32が開口しており、そこより、レーザ光、すなわちレーザ光源35から出射されコリメートレンズ34で平行光とされた光が出射されるようになっている。この投光ユニット30は、図1における左側の治具21の側面に固定されるが、治具側には投光ユニット30の上下方向に関する位置を調整可能な調整機構23が設けられている。
【0023】
図2に示すように、投光ユニット30は、レーザ出射口32の中心位置(光軸L)が上下方向においてガラス基板Wの上面W1(本発明の検出面に相当)とほぼ同じ高さとなるように調整機構23によって位置調整されている。換言すれば、レーザ出射口32の下半分がガラス基板Wの端面Waに対向し、それ以外の部分がガラス基板Wの上面側に露出される配置としてある。係る配置とすることで、投光ユニット30から出射されたレーザ光のうちの、中心部分の光が、ガラス基板W上の異物に対して照射されることとなる。
【0024】
一方、受光カメラ40は、図1における右側の治具25の側面において投光ユニット30と対向する位置に固定されている。これら、投光ユニット30と受光カメラ40は、スライダ20と一体的に移動するようになっている。また、受光カメラ40と次述するコントローラ50との間が信号線を通じて接続されている。また、同図に示す符号70はモニタである。
【0025】
次に、図3を参照して、コントローラ50の電気的構成について説明する。
【0026】
コントローラ50は、CPU(本発明の検出手段、判定手段に相当)51、制御回路53、フレームメモリ55、RAM56(本発明の記憶手段に相当)、ROM57並びに、出力回路58(本発明の報知手段に相当)より構成される。フレームメモリ55は、受光カメラ40で撮像された画像データを記憶するためのものであり、制御回路53はCPU51からの指令に基づいてフレームメモリ55に画像データを記憶させたり、或いはフレームメモリ55から画像データの読み出しを行うものである。出力回路58は、CPU51からの指令に基づいてモニタ70に対し検出結果や光軸ずれの警告等を表示させための出力を行う。
【0027】
ROM57には、画像データを解析するための各種プログラムが格納されており、これがRAM56上の所定領域に読み出されてCPU51により実行される。また、RAM56にはプログラムが読み出される領域の他に、CPU51が処理を行う際に、データを一時記憶しておくための領域が設けられている。
【0028】
また、同図には示されていないが、受光カメラ40は液晶シャッターを備えている。液晶シャッターは、CPU51の指令に基づいて制御回路53から出力されるシャッター開閉指令を受けて動作して、受光カメラ40の撮像面41Aを開閉する。尚、同図に示す符号43はレンズであり、受光カメラ40の撮像面41Aに適切な大きさの画像を投影させるものである。
【0029】
次に、具体的な検出動作について説明する。
検出が開始されると、まず、スライダ20の位置が、図4に示す初期位置にセットされ、その後、投光ユニット30からレーザ光の照射が開始される。続いて、駆動装置の駆動が開始されて、スライダ20は図4の下方に向けてゆっくりと水平移動してゆく。これにより、投光ユニット30と受光カメラ40から構成される二次元画像データ取得手段Dもスライダ20とともに、一体的に移動する。
【0030】
この間、CPU51からは、シャッター開閉指令が所定周期で受光カメラ40に送られることで、撮影が行なわれる。そして、撮影が行なわれるたびに、制御回路53によって受光カメラ40から画像データが読み出され、これが、フレームメモリ55に記憶されるようになっている。
【0031】
かくして、フレームメモリ55には、ガラス基板Wの一端(図4における左側)から出射された後、ガラス基板Wの上面に沿って水平に進み、ガラス基板Wの他端(図4における右側)に達したレーザ光を受光した各時点の画像データが保持される。そして、CPU51では、画像データの取得と並行して、保持された画像データの画像解析が行なわれる。
【0032】
ここで、画像解析に先立って、取得された画像データについて説明する。図5は、ガラス基板W上に異物がない場合に受光カメラ40によって撮像された画像を例示している。同図のF1は、レーザ光源35から出射された後、直進した光が入光した受光スポットを示しており、基本的には、当該部分からは信号レベルの高い撮像信号が出力される。すなわち、入光部分では受光される光量が高く、これとは、反対にそれ以外の部分では低くなる。
【0033】
ところが、光量の高い領域部分、或いは低い領域部分について、更に、光量の分布を細かくみると、受光された各点の光量は一定でなく、受光される光量が特に高い部分とそれに比べて弱い部分とがある(図示せず)。このように光量の分布に斑が生ずる一つの要因に、レーザ光の回折現象がある。レーザ光の回折現象はレーザ光の進行が、障害物によって遮られるときに、レーザ光が障害物を回りこむ、換言すれば、光の直進性がわずかに崩れる現象であり、これにより、撮像面41A上に回折縞が現れるためである。
【0034】
図6は、撮像面41Aと障害物との間の距離と、回折縞の模様との関係を示したものであるが、一般に、撮像面41Aに障害物が近いほど空間周波数uの高い回折縞が現れ、これとは反対に、撮像面41Aに障害物が遠いほど空間周波数uの低い回折縞が現れる。
【0035】
本実施形態であれば、レーザ光を遮る障害物にはガラス基板W上の異物に加えて、図2に示すようにレーザ光源35に近い側にレーザ出射口32の口縁部32Aがあり、更に、ガラス基板Wの端面Waも障害物となるから、図5に示す画像データ中には、これらによって生じた異なる空間周波数uの回折縞(図示せず)が混在した状態となる。尚、空間周波数uとは、画像データ中における濃淡(光度の強弱)の周期であり、空間周波数uが高いほど濃淡を繰り返す周期が短く(縞の間隔が短く)、これとは反対に空間周波数uが低いほど濃淡を繰り返す周期が長く(縞の間隔が広く)なる。
【0036】
また、受光カメラ40の撮像面41A全体から得られる画像データのうち一部の領域が、予め解析の対象となる検出エリア(本発明の検出領域に相当)として指定されている。本実施形態では、図5に示すように、横方向に細長い所定の大きさの検出エリアA1が設けられている。
【0037】
このように、検出エリアの指定を行うのは、画像データの全画素に対して後述するFFT等の処理を行うと解析の対象となるデータ数が多くなり処理に時間がかかるから、解析の対象となるデータを必要最小限に留めるためであり、横方向に検出エリアを長くとっているのは、スライダ20が横方向に走査されるからである。
【0038】
また、本実施形態のものは、検出エリアA1内に受光中心Cが含まれるように投光ユニット30と受光カメラ40との相対位置が調整されている。受光中心Cというのは、受光スポットF1の中心であり、受光量が最大であるとともに、その周辺部の受光量が高く安定している。このように、受光量が高く安定した領域を検出エリアとして設定しておくことで、安定した検出が可能となる。
【0039】
仮に、受光量が低い領域を対象に検出エリアを設定してしまうと、レーザの出力状況によっては、指定した検出エリアの各画素の受光レベルが、受光カメラ40で信号として検出可能なレベルを下回ることもあり、これでは、安定した検出を行うことが出来なくなる。この点、上述のように、受光量が高く安定した領域をエリアとして予め指定しておけば、係る事態を未然に回避することが可能となる。
【0040】
さて、CPU51では、上述の画像データを解析することにより、以下に述べる異物検出処理と、光軸ずれ判定処理とを行う。
【0041】
(異物検出処理)
異物検出処理には、二つの段階、すなわち、取得された各時点の画像データに対してFFT(離散フーリエ変換)を行なって、各画像データのパワースペクトル分布を算出する第一段階と、第一段階で取得されたパワースペクトル分布の時間的な変化を検出し、これに基づいて異物検出を行う第二段階とがある。
【0042】
<第1段階>
異物検出処理においては、CPU51は、まず検出エリアA1内の画像データを対象として、次述する(1)、(2)式に従って、公知のFFTを行って、パワースペクトル分布、すなわち、検出エリアA1内の画像データ中に、如何なる空間周波数の成分が、どの割合で含まれているのかを算出する。図7には、パワースペクトル分布の一例が示されているが、このものであれば、対象となった画像データ中に、空間周波周1の成分が最も多く含まれ、次いで空間周波数2の成分、次いで空間周波数3の成分が多く含まれていたこととなる。そして、CPU51は上記したパワースペクトル分布を各画像データごとに、それぞれ算出する。尚、CPU51がFFTを行なってパワースペクトル分布を算出する機能が、本発明の演算手段を果たす機能に相当する。
【0043】
【数1】
【数2】
u・・・・・・空間周波数
f(n)・・・画像データ(画素の光量)
F(u)・・・スペクトル
G(u)・・・パワースペクトル
【0044】
<第二段階>
CPU51は、上記した第一段階の処理を繰り返し行うことで所定数(例えば、10個)のパワースペクトル分布が得られると、今度はパワースペクトル値の時間的な変化の有無を、各空間周波数uについて、それぞれ算出する。具体的には、空間周波数1であれば、10個のパワースペクトル値がサンプリングされているから、まず、サンプリングされた10個の値からパワースペクトル値の平均を算出する。そして、得られた平均値を基準として各パワースペクトル値の増減値(絶対値)を算出し、これを設定された閾値と比較する。比較した結果、空間周波数1のパワースペクトル値の増減値がいずれも、閾値を下回っている場合には、空間周波数1について変化なしと判定する。
【0045】
そして、上記した増減値と閾値とを比較する処理を全ての空間周波数uについて行ない、全ての空間周波数uについて、増減値が閾値を下回っていれば、そのときには、異物なしとの判定を行う。これは、ガラス基板W上に異物がない場合には、同じ空間周波数uであれば、図8に示すように、パワースペクトル値はほぼ一定しており、ほとんど、変化が現れないからである。
【0046】
CPU51は、図9に示すように、10個のスペクトル分布がストックされるまで、初回の判定を行なわないが、そこで異物なしと判定した場合には、それ以降、新しいスペクトル分布が、前記した第一段階における処理で取得される都度、判定を行う。すなわち、新しい10個のパワースペクトル分布を対象(サンプルデータ)として、上記した平均値の算出を再び行い、その後、得られた平均値を基準として各パワースペクトル値の増減量を算出し、これを設定された閾値と比較する。このように、パワースペクトル分布の取得と同時に判定処理を行うことで、スライダ20によるレーザ光の走査(画像データの取得)と並行して、異物検出を行うことが出来る(初回検出を除く)。
【0047】
そして、スライダ20が、終端位置(図4に示す一点鎖線で示す位置)まで達し、レーザ光による光の走査がガラス基板Wの全面についておこなわれると、検出動作が完了する。
【0048】
一方、上記した第二段階の判定処理において、いずれかの空間周波数uについて、増減値が閾値を上回っている場合には、パワースペクトル分布に時間的な変化があったと判定されて、異物ありとされる。これは、ガラス基板W上に異物がある場合には、図10に示すように、異物により生じた回折縞が撮像面41A上に現れるから、これにより、パワースペクトル値の分布に変化が起きるためである。より具体的に言えば、発生した回折縞の空間周波数uに近い周波数帯(図11におけるC部)では、パワースペクトル値が大きくなる。
【0049】
そして、CPU51は異物ありと判定した場合には、出力回路58を通じて異物検出信号をモニタ70に出力して、モニタ70上に異物を検出した旨を表示させるとともに、これと並行して、光軸方向(図1におけるB方向)に関する異物の位置を検出するための処理を行う。また、出力回路58はスライダ20を駆動させる駆動装置にも接続されており、異物検出信号が出力されると、駆動装置がこれを受信してスライダ20の進退を停止させるようになっている。
【0050】
次に、異物の位置検出であるが、これは、予めROM57に記憶されているパワースペクトル分布の変化パターンと、検出されたパワースペクトル分布の変化パターンとを照合し、最も変化パターンの似通ったパワースペクトル分布を抽出することにより行なわれる。すなわち、本実施形態のものであれば、異物検出を行うに先立って、試験的にガラス基板W上に異物を置いた状態で上記した一連の処理を行ってパワースペクトル分布を取得しており、係る試験を、図12に示すように光軸方向に異物を移動させて、各位置においてそれぞれ行っている。これにより、例えば、図12の(A)から(E)の5つのパワースペクトル分布の変化パターンが取得されている(ROM57に記憶してある)。
【0051】
そして、CPU51は、現実の測定において、先の第二段階における判定処理で異物ありと判定すると、判定の対象となったパワースペクトル分布の変化パターンと、上記した5つのパワースペクトルの分布の変化パターンを照合する。すなわち、変化のあった空間周波数帯を比較する。
【0052】
先に述べたように、図11の例であれば、空間周波数uが2〜4の部分において特に、変化が現れている。一方、これと同じ周波数帯に変化が現れているものは、図12の(C)であるから、このときには、レーザ光源35と受光カメラ40のほぼ中間位置に異物があると判定され、その結果がモニタ70に表示される。尚、このように、光軸方向に関する異物の位置によって、変化が現れる周波数帯が異なるのは、図6に示すように、光軸方向に関する異物の位置によって、撮像面41Aに現れる回折縞の空間周波数uがそれぞれ、異なるためである。
【0053】
このように本実施形態の微小異物検出装置Sは、投光ユニット30、受光カメラ40並びにコントローラ50だけで構成されているから、部品点数が少なく、装置全体がコンパクトにまとめられている。また、異物の検出については、異物によって生じた回折縞に起因するパワースペクトル分布の時間的な変化に基づいて検出を行なっている。従って、ノイズ成分、並びに種々の空間周波数成分が混在する画像データの中から、異物に起因する画像の変化を適格に捉えることが可能となり、受光量変化に基づいて判定を行う場合(図16の構成のもの)に比べて、信頼性の高い検出結果を得ることが出来る。
【0054】
また、異物の有無についての判定は、スライダ20の移動(レーザ光による走査)と並行して行なわれ、異物ありと判定された場合には、その場でスライダ20が停止されるようになっているから、単に、異物の検出のみを行うものに比べて、更に、商品性が高くなっている。加えて、コントローラ50のROM57には、予め、パワースペクトル分布の変化パターンが記憶されており、これと異物ありと判定されたパワースペクトル分布を比較することで、光軸方向に関する異物の位置を特定することが出来るようになっている。このような構成であれば、ガラス基板W上における異物の位置を容易に特定することが可能となるから、より一層、商品性に優れるものとなる。
【0055】
(光軸ずれ判定処理)
次にレーザ光源35と受光カメラ40との間の光軸のずれを判定するための光軸ずれ判定処理について説明する。まず、この光軸ずれ判定処理を行うに先立って、基準データの検出が行われる。本実施形態では、この基準データは、CPU51が、異物が付着していない状態において受光カメラ40より出力された画像データに基づいて、検出エリアA1内の各画素についての受光量の総和を算出することで得られ、その算出された数値はRAM56上に記憶される。受光量の総和は、具体的には、例えば、各画素の受光量レベルが所定レベル以上であるときには1、そうでないときには0として、検出エリアA1内の全ての画素についてその和を求めることで得られる。
【0056】
光軸ずれ判定処理は、例えば、スライダ20が前述の初期位置にセットされたときに、上記異物検出処理を実行するよりも前に行われる。そのため、異物検出処理時における演算処理の負荷の増大を回避することができる。CPU51は、光軸ずれ判定処理を開始すると、スライダ20が初期位置にある状態で受光カメラ40より出力された画像データに基づき、検出エリアA1内の各画素について受光量の総和を求めることで検出データを得る。そして、その検出データを先の基準データと比較する。
【0057】
ここで、レーザ光源35及び受光カメラ40のスライダ20に対する取付位置(取付姿勢)が調整時のままであった場合には、検出データの受光スポットF1の位置は、基準データの受光スポットとほぼ同じであり、受光量の総和もほとんど変化しない。これに対し、レーザ光源35若しくは受光カメラ40がスライダ20に対して移動した場合には、光軸のずれが生じて、検出データの受光スポットの位置が基準データの受光スポットの位置からずれる事態が生じ得る。例えば、図5の受光スポットF2は、光軸が上下方向にずれた場合を例示している。このとき、検出エリアA1内の各画素についての受光量の総和は、大きく変化する。
【0058】
CPU51は、検出データと基準データとを比較して、その受光量の総和の変化が所定の閾値未満である場合には、光軸のずれは無いと判定して、続いて異物検出処理を実行し、閾値以上である場合には、光軸にずれが有ると判定して、出力回路58を介してモニタ70に報知信号を出力する。これにより、モニタ70には光軸にずれがある旨を示す表示がなされる。なお、出力回路58から報知信号を出力した際には、モニタ70に付随するスピーカ(図示せず)から警告音を鳴らすようにしても良い。
【0059】
以上のように本実施形態によれば、予め検出エリアA1の画像データに基づく基準データを記憶しておき、判定時に、検出エリアA1の画像データに基づく検出データを記憶された基準データと比較することで、光軸のずれの有無を判定する。光軸にずれがあると判定された場合には外部に報知されるため、作業者が光軸にずれが生じたことを容易に把握することができる。
【0060】
また、画像データの全画素に対して判定の処理を行うと解析の対象となるデータ数が多くなり処理に時間がかかるが、検出領域の画像データのみに対して判定の処理を行うことで処理を短時間で行うことができる。
【0061】
また、検出エリアA1における受光量の総和を基準データと検出データとの間で比較することにより、光軸のずれの有無を判定することができる。
【0062】
また、異物の検出処理を行う前に光軸ずれの判定を行うため、異物検出処理時における演算処理の負荷の増大を回避することができる。
【0063】
<実施形態2>
次に本発明の実施形態2について図13及び図14を参照して説明する。
実施形態1では、図5に示す一つの検出エリアA1をFFTの対象としたが、この実施形態では、図13に示すように、FFTの対象となる検出エリアを横方向に延びる第1の検出エリアA2と、縦方向に延びる第2の検出エリアA3(ともに本発明の検出領域に相当)との2つ設けている。このように2つの検出エリアA2,A3を設けているのは、ガラス基板Wの上面に異物が付着している場合と、ガラス基板Wの裏面に異物が付着している場合の双方の場合について、検出を可能とするためである。
【0064】
具体的に説明すると、本実施形態では、受光カメラ40の撮像面41A上に現れる回折縞に着目して、異物の有無を判別している。回折縞は、干渉物がある場合にレーザ光が回折現象を起こすことに起因して現れるが、現れる縞模様は干渉物の形状に倣う傾向がある。
【0065】
すなわち、異物がガラス基板Wの上面にある場合であれば、異物によってレーザ光の進行が妨げられるので、異物そのものが干渉物になり、この場合には、異物の形状に倣った縞模様の回折縞が現れる。例えば、異物が球状であれば、受光カメラ40の撮像面41A上に、図6に示すような同心円状の縞模様の回折縞が現れる。
【0066】
これに対して、異物がガラス基板Wの下面にある場合であれば、異物に乗り上げて湾曲したガラス基板Wによってレーザ光の進行が妨げられるので、湾曲したガラス基板Wが干渉物となる。その結果、回折縞の模様はガラスWの上面に倣った模様、即ち横方向に緩やな湾曲をなす曲線が、縦方向に重なる縞模様となる。
【0067】
出願人の知見によれば、図6に示すような同心円状の回折縞に対しては、第1の検出エリアA2を対象に画像解析を行うと回折縞の出現を高精度に検出出来る傾向があり、また、横方向に緩やな湾曲をなす曲線状の回折縞に対しては、第2の検出エリアA3を対象に画像解析を行うと回折縞の出現を高精度に検出出来る傾向にある。
【0068】
また、各検出エリアA2,A3は、図13に示すように、いずれも受光中心Cに重なるように設定してあるため、安定した検出が可能となる。
【0069】
(光軸ずれ判定処理)
次に本実施形態の光軸ずれ判定処理について説明する。まず、この光軸ずれ判定処理を行うに先立って、基準データの測定が行われる。本実施形態では、この基準データは、各検出エリアA2,A3内においてそれぞれ受光量が最大となる画素の位置であり、即ちここではともに受光中心Cの位置が基準データとしてRAM56上に記憶される。
【0070】
CPU51は、光軸ずれ判定処理を開始すると、スライダ20が初期位置にある状態で受光カメラ40より出力された画像データに基づき、各検出エリアA2,A3内の受光量が最大となる画素の位置をそれぞれ検出データとして求め、それらを基準データと比較する。ここで、レーザ光源35及び受光カメラ40のスライダ20に対する取付位置(取付姿勢)が調整時のままであった場合には、受光量が最大となる画素位置はほとんど変化しないが、例えば、図14に示すように、光軸にずれが生じて、受光スポットの位置がF2へずれた場合には、受光量が最大となる画素位置が大きく変化する。
【0071】
CPU51は、各検出エリアA2,A3について、それぞれ検出データと基準データとを比較して、その受光量が最大となる画素位置の変化が所定の閾値以上であるか否かを調べる。そして、検出エリアA2,A3の両方について画素位置の変化が閾値以下であった場合には、光軸のずれは無いと判定して、続いて異物検出処理を実行し、少なくともいずれか一方の検出エリアA2,A3について、画素位置の変化が閾値以上であった場合には、光軸にずれが有ると判定して、出力回路58を介してモニタ70に報知信号を出力する。これにより、モニタ70には光軸にずれがある旨を示す表示がなされる。
【0072】
以上のように本実施形態によれば、受光量が最大となる位置を基準データと検出データとの間で比較することにより、光軸のずれの有無を判定することができる。
【0073】
また、検出エリアが横方向に長い第1の検出エリアA2と縦方向に長い第2の検出エリアA3とからなり、両検出エリアA2,A3の少なくとも一方において、基準データと検出データとの間で基準以上の差異があった場合に光軸のずれが有ると判定するため、判定の精度を高めることができる。
【0074】
<実施形態3>
次に本発明の実施形態3について図15を参照して説明する。
本実施形態では、FFTの対象となる検出エリアとして縦方向に延びる1つの検出エリアA4を一つ設けている。本実施形態では、光軸ずれ判定処理を行うに先立って、まず、検出エリアA4内における受光スポットの重心位置を求め、その重心位置を基準データとしてRAM56上に記憶させる。本発明でいう重心位置とは、いわゆる面積重心位置、若しくは体積重心位置であり、それぞれ次の数式によって求めることができる。
【0075】
<面積重心位置>
面積重心位置={Σ(MI)/ΣM}
I:受光部41の撮像面41A上における、検出エリアA4内の各画素の位置ベクトル
M:上記各画素の受光量レベルが所定レベル以上であるときには例えば1、そうでないときには0
【0076】
<体積重心位置>
体積重心位置={Σ(mI)/Σm}
I:上記面積重心位置の場合と同じ
m:上記各画素の受光量レベルに応じた係数
【0077】
CPU51は、光軸ずれ判定処理を開始すると、受光カメラ40より出力された画像データに基づき、検出エリアA4内の重心位置を検出データとして求め、それを基準データと比較する。ここで、レーザ光源35及び受光カメラ40のスライダ20に対する取付位置(取付姿勢)が調整時のままであった場合には、重心位置が初期の位置G1からほとんど変化しないが、図15に示すように、光軸にずれが生じて受光スポットがF2に移動した場合には、重心位置がG2に移る。
【0078】
そして、CPU51は、重心位置の変化が所定の閾値以下であった場合には、光軸のずれは無いと判定して、続いて異物検出処理を実行し、重心位置の変化が閾値以上であった場合には、光軸にずれが有ると判定して、出力回路58を介してモニタ70に報知信号を出力する。これにより、モニタ70には光軸にずれがある旨を示す表示がなされる。
【0079】
以上のように本実施形態によれば、受光スポットの重心位置を、基準データと検出データとの間で比較することにより、光軸のずれの有無を判定することができる。
【0080】
<他の実施形態>
本発明は上記記述及び図面によって説明した実施形態に限定されるものではなく、例えば次のような実施形態も本発明の技術的範囲に含まれる。
(1)上記実施形態では、微小異物検出装置Sをガラス基板W上の異物検出に適用したが、用途はガラス基板等に限定されるものではなく、金属板上の異物検出等に適用してもよい。
【図面の簡単な説明】
【0081】
【図1】本発明の実施形態1に係る微小異物検出装置の概観構成を示す斜視図
【図2】投光ユニットのレーザ光の光軸と、ガラス基板上との関係(上下方向の位置関係)を示す図
【図3】検出装置の電気的構成を示すブロック図
【図4】スライダの初期位置、並びに終端位置を示す平面図
【図5】受光カメラの受光画像(画像データ)を示す図
【図6】異物の位置により回折縞の模様が変わる様子を示す図
【図7】画像データをFFTした結果(パワースペクトル分布)を示す図
【図8】パワースペクトル分布の時間的な推移を示す図
【図9】CPUによる異物の判定タイミングを示す図
【図10】ガラス基板上に異物があった場合の画像データを示す図
【図11】パワースペクトル分布の時間的な推移に変化のあった状態を示す図
【図12】パワースペクトル分布の変化パターンを示す図
【図13】実施形態2において光軸のずれがない状態での受光カメラの受光画像(画像データ)を示す図
【図14】実施形態2において光軸のずれが生じた状態での受光カメラの受光画像(画像データ)を示す図
【図15】実施形態3における受光カメラの受光画像(画像データ)を示す図
【図16】従来例を示す図
【符号の説明】
【0082】
S…微小異物検出装置
D…二次元画像データ取得手段
30…投光ユニット(レーザ照射手段)
40…受光カメラ(撮像手段)
41A…撮像面
50…コントローラ
51…CPU(検出手段、判定手段)
56…RAM(記憶手段)
58…出力回路(出力手段)
A1〜A4…検出エリア(検出領域)
C…受光中心(受光量が最大となる位置)
G1,G2…重心位置
W…ガラス基板(対象物)
W1…上面(検出面)
【特許請求の範囲】
【請求項1】
異物に照射された光の回折現象によって生ずる回折縞を利用して、対象物上の異物を検出する異物検出装置であって、
前記対象物の両側において光軸が前記対象物の検出面に沿うように対向配置されるレーザ照射手段、及び前記レーザ照射手段から照射された光を撮像面上に受光して画像データを出力する撮像手段からなる二次元画像データ取得手段と、
前記撮像手段の撮像面のうちの検出領域の画像データにおける回折縞に変化に基づいて前記検出面上の異物の検出を行う検出手段と、
前記二次元画像データ取得手段により出力された画像データに基づく基準データを記憶する記憶手段と、
前記記憶手段による前記基準データの記憶より後に前記二次元画像データ取得手段により出力された画像データに基づく検出データと、前記記憶手段に記憶された前記基準データとを比較して、前記レーザ照射手段及び前記撮像手段間における前記光軸のずれの有無を判定する判定手段と、
前記判定手段において、前記光軸のずれが有ると判定された場合に外部へ報知する報知手段と、
を備えた異物検出装置。
【請求項2】
前記記憶手段は、前記検出領域の画像データに基づく基準データを記憶し、
前記判定手段は、前記検出領域の画像データに基づく検出データと、前記基準データとを比較して前記光軸のずれの有無を判定する、請求項1に記載の異物検出装置。
【請求項3】
前記記憶手段は、前記検出領域における受光量の総和を前記基準データとして記憶し、
前記判定手段は、前記検出領域における受光量の総和を前記検出データとして、前記基準データと比較することで前記光軸のずれの有無を判定する、請求項2に記載の異物検出装置。
【請求項4】
前記記憶手段は、前記検出領域における受光スポットの重心位置を前記基準データとして記憶し、
前記判定手段は、前記検出領域における受光スポットの重心位置を前記検出データとして、前記基準データと比較することで前記光軸のずれの有無を判定する、請求項2に記載の異物検出装置。
【請求項5】
前記記憶手段は、前記検出領域における受光量が最大となる位置を前記基準データとして記憶し、
前記判定手段は、前記検出領域における受光量が最大となる位置を前記検出データとして、前記基準データと比較することで前記光軸のずれの有無を判定する、請求項2に記載の異物検出装置。
【請求項6】
前記検出領域は、前記撮像面上における一方向に長い第1領域と、その第1領域に直交する方向に長い第2領域とを有しており、
前記判定手段は、前記第1領域と前記第2領域とのそれぞれについて前記基準データと前記検出データとの比較を行うとともに、前記第1領域と前記第2領域とのうち少なくとも一方において、前記基準データと前記検出データとの間に基準以上の差異があった場合に光軸のずれが有ると判定する、請求項1から請求項5のいずれかに記載の異物検出装置。
【請求項7】
前記検出手段は、前記レーザ照射手段の光軸と直交する方向に、前記二次元画像データ取得手段あるいは前記対象物の少なくともいずれか一方を移動させ、移動前後の画像データにおける回折縞の変化に基づいて前記検出面上の異物の検出を行うものであって、
前記判定手段は、前記検出手段による検出に先立って、前記二次元画像データ取得手段あるいは前記対象物の少なくともいずれか一方を静止させた状態で、前記検出データと前記基準データとを比較して、前記光軸のずれの有無を判定するよう構成されている、請求項1から請求項6のいずれかに記載の異物検出装置。
【請求項1】
異物に照射された光の回折現象によって生ずる回折縞を利用して、対象物上の異物を検出する異物検出装置であって、
前記対象物の両側において光軸が前記対象物の検出面に沿うように対向配置されるレーザ照射手段、及び前記レーザ照射手段から照射された光を撮像面上に受光して画像データを出力する撮像手段からなる二次元画像データ取得手段と、
前記撮像手段の撮像面のうちの検出領域の画像データにおける回折縞に変化に基づいて前記検出面上の異物の検出を行う検出手段と、
前記二次元画像データ取得手段により出力された画像データに基づく基準データを記憶する記憶手段と、
前記記憶手段による前記基準データの記憶より後に前記二次元画像データ取得手段により出力された画像データに基づく検出データと、前記記憶手段に記憶された前記基準データとを比較して、前記レーザ照射手段及び前記撮像手段間における前記光軸のずれの有無を判定する判定手段と、
前記判定手段において、前記光軸のずれが有ると判定された場合に外部へ報知する報知手段と、
を備えた異物検出装置。
【請求項2】
前記記憶手段は、前記検出領域の画像データに基づく基準データを記憶し、
前記判定手段は、前記検出領域の画像データに基づく検出データと、前記基準データとを比較して前記光軸のずれの有無を判定する、請求項1に記載の異物検出装置。
【請求項3】
前記記憶手段は、前記検出領域における受光量の総和を前記基準データとして記憶し、
前記判定手段は、前記検出領域における受光量の総和を前記検出データとして、前記基準データと比較することで前記光軸のずれの有無を判定する、請求項2に記載の異物検出装置。
【請求項4】
前記記憶手段は、前記検出領域における受光スポットの重心位置を前記基準データとして記憶し、
前記判定手段は、前記検出領域における受光スポットの重心位置を前記検出データとして、前記基準データと比較することで前記光軸のずれの有無を判定する、請求項2に記載の異物検出装置。
【請求項5】
前記記憶手段は、前記検出領域における受光量が最大となる位置を前記基準データとして記憶し、
前記判定手段は、前記検出領域における受光量が最大となる位置を前記検出データとして、前記基準データと比較することで前記光軸のずれの有無を判定する、請求項2に記載の異物検出装置。
【請求項6】
前記検出領域は、前記撮像面上における一方向に長い第1領域と、その第1領域に直交する方向に長い第2領域とを有しており、
前記判定手段は、前記第1領域と前記第2領域とのそれぞれについて前記基準データと前記検出データとの比較を行うとともに、前記第1領域と前記第2領域とのうち少なくとも一方において、前記基準データと前記検出データとの間に基準以上の差異があった場合に光軸のずれが有ると判定する、請求項1から請求項5のいずれかに記載の異物検出装置。
【請求項7】
前記検出手段は、前記レーザ照射手段の光軸と直交する方向に、前記二次元画像データ取得手段あるいは前記対象物の少なくともいずれか一方を移動させ、移動前後の画像データにおける回折縞の変化に基づいて前記検出面上の異物の検出を行うものであって、
前記判定手段は、前記検出手段による検出に先立って、前記二次元画像データ取得手段あるいは前記対象物の少なくともいずれか一方を静止させた状態で、前記検出データと前記基準データとを比較して、前記光軸のずれの有無を判定するよう構成されている、請求項1から請求項6のいずれかに記載の異物検出装置。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】

【図12】
【図13】
【図14】
【図15】
【図16】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【公開番号】特開2008−32649(P2008−32649A)
【公開日】平成20年2月14日(2008.2.14)
【国際特許分類】
【出願番号】特願2006−208915(P2006−208915)
【出願日】平成18年7月31日(2006.7.31)
【出願人】(000106221)サンクス株式会社 (578)
【Fターム(参考)】
【公開日】平成20年2月14日(2008.2.14)
【国際特許分類】
【出願日】平成18年7月31日(2006.7.31)
【出願人】(000106221)サンクス株式会社 (578)
【Fターム(参考)】
[ Back to top ]