
異物除去システム
【課題】吸引管の詰まりを精度良く且つ速やかに解消可能な異物除去システムを提供すること。
【解決手段】
食品を搬送する搬送装置2と、食品をコンピュータに予め設定された食品撮影位置で自動撮影する撮影装置4と、撮影装置4の下流側に設けられ、食品中の異物をコンピュータに予め設定された異物除去位置で除去する異物除去手段M(吸引管6、圧力センサ7、吹き付け装置10)と、食品の画像情報を生成する画像情報生成手段と、画像情報においてコンピュータに予め設定された色情報に対応する色情報を有するエリアを異物として判定する異物判定手段と、異物の存在エリアに関する異物位置情報を生成する異物位置情報生成手段と、搬送装置2の搬送距離に基づいて、食品が食品撮影位置から搬送された距離に関する距離情報を算出する距離情報算出手段と、を備える異物除去システム1。
【解決手段】
食品を搬送する搬送装置2と、食品をコンピュータに予め設定された食品撮影位置で自動撮影する撮影装置4と、撮影装置4の下流側に設けられ、食品中の異物をコンピュータに予め設定された異物除去位置で除去する異物除去手段M(吸引管6、圧力センサ7、吹き付け装置10)と、食品の画像情報を生成する画像情報生成手段と、画像情報においてコンピュータに予め設定された色情報に対応する色情報を有するエリアを異物として判定する異物判定手段と、異物の存在エリアに関する異物位置情報を生成する異物位置情報生成手段と、搬送装置2の搬送距離に基づいて、食品が食品撮影位置から搬送された距離に関する距離情報を算出する距離情報算出手段と、を備える異物除去システム1。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、異物除去システムに関する。より詳しくは、コンピュータを利用し、食品の異物除去を行う異物除去システムに関する。
【背景技術】
【0002】
食品が市場に流通する際、品質の確保等のために異物が混入していないことが求められる。しかし、上記異物を人が手作業で取り除くことは非常に煩雑なものである。そのため、機械作業により異物を取り除く方法が提案されている。
【0003】
例えば、特許文献1では、もやしの中の異物を除去する装置に関する技術が開示されている。そして、特許文献2では、椎茸に付着したゴミ等の異物を除去する装置に関する技術が開示されている。このような技術では、人による手作業に比べ、効率的且つ正確に異物を除去することができる。
【0004】
また、近年、馬鈴薯(じゃがいも)等を原材料にした加工食品が市場に流通しており、上記特許文献1、2に開示の技術と同様に機械作業により異物を除去する方法が提案されている。上記加工食品は馬鈴薯の皮以外の部分を主原料として製造されるが、取り除き切れなかった皮等が加工食品中に異物として混入してしまう懸念がある。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開平10−150967号公報
【特許文献2】特開2004−050106号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
上記懸念に対し、本願発明者らの鋭意検討の結果、馬鈴薯等を原材料にした加工食品の製造過程において、馬鈴薯を裏ごしした生地の状態で異物を吸引する方法が、異物を効率的且つ正確に取り除く方法であることを見出した。
【0007】
しかしながら、上記異物の吸引を繰り返し行うと、異物と共に吸引した微量の生地等が蓄積し、吸引管が詰まってしまうという問題があった。吸引管が一旦詰まってしまうと、吸引力の低下のために、以後、異物の吸引を正常に行うことはできず、吸引作業を一旦中断して詰まりを解消する必要があった。そのため、上記加工食品を大量に効率良く製造するために、吸引管の詰まりを精度良く且つ速やかに解消することができる異物除去システムが希求されていた。
【0008】
そこで、本発明は、上記課題に鑑みてなされたものであり、本発明の目的とするところは、異物の吸引を繰り返しても、吸引管の詰まりを精度良く且つ速やかに解消することが可能な、新規かつ改良された異物除去システムを提供することにある。
【課題を解決するための手段】
【0009】
本発明に係る異物除去システムは、コンピュータを利用し、食品の異物除去を行う異物除去システムであって、食品を搬送する搬送装置と、上記食品をコンピュータに予め設定された食品撮影位置で自動撮影する撮影装置と、当該撮影装置に対し下流側に設けられ、予め設定された異物除去位置で上記食品中の異物を除去する異物除去手段と、上記撮影装置の撮影により食品の画像情報を生成する画像情報生成手段と、上記画像情報においてコンピュータに予め設定された色情報に対応する色情報を有するエリアを異物として判定する異物判定手段と、上記異物判定手段の判定により上記異物の存在エリアに関する異物位置情報を生成する異物位置情報生成手段と、上記搬送装置の搬送距離に基づいて、上記食品が上記食品撮影位置から搬送された距離に関する距離情報を算出する距離情報算出手段と、を備え、上記異物除去手段は、上記距離情報及び上記異物位置情報に基づいて、上記異物除去位置まで搬送された上記異物を先端部分から吸引する吸引管と、上記吸引管が上記異物を吸引する際の圧力を検知する圧力センサと、上記圧力が所定の閾値以下である回数が予め設定された回数に達する毎に、上記吸引管の内部に向けて気体を吹き付ける吹き付け装置と、を有する異物除去システムである。
また、上記予め設定された回数は2回以上であることが好適である。
また、上記異物除去システムは、上記距離情報及び上記異物位置情報に基づいて、上記吸引管の先端部分を移動させる吸引管制御装置を更に有していてもよい。
また、上記吹き付け装置には、上記気体の吹き出し口が漏斗状に広がる漏斗状部が形成されており、上記圧力が所定の閾値以下である回数が予め設定された回数に達する毎に、上記吸引管制御装置は、上記吸引管の先端部分を上記漏斗状部に対向する位置に移動させ、上記吹き付け装置は、上記漏斗状部から上記吸引管の内部に気体を吹き付けてもよい。
また、上記漏斗状部は、上記吹き出し口側に向けて弾性部材によって付勢されていてもよい。
また、上記圧力センサは、上記吸引管の途中箇所から分岐した分岐管に設けられていてもよい。
また、上記圧力が所定の閾値以下である回数が予め設定された回数に達する毎に、上記吹き付け装置は、上記分岐管に気体を吹き付けてもよい。
また、上記食品は、例えば、裏ごしされた馬鈴薯であってよい。
また、上記搬送装置は、例えば、ベルトコンベア又はプラスチックコンベアであってもよい。
また、上記搬送装置は、食品を搬送する第1搬送装置と、上記吹き付け装置が上記吸引管の内部に向けて気体を吹き付けている間に、異物除去されずに搬送された上記食品を下流から上流に向けて搬送し、上記食品を第1搬送装置に搬送させる第2搬送装置と、を有していてもよい。
【発明の効果】
【0010】
本発明によれば、異物の吸引を繰り返しても、吸引管の詰まりを精度良く且つ速やかに解消することが可能になる。
【図面の簡単な説明】
【0011】
【図1】本発明の実施形態に係る異物除去システムを説明するための図である。
【図2】同実施形態に係る異物除去システムで異物除去される馬鈴薯生地Pの写真図である。
【図3】同実施形態に係る異物除去システムの照明を説明するための図である。
【図4】同実施形態に係る異物除去システムの撮影装置を説明するための図である。
【図5】同実施形態に係る異物除去システムの圧力センサを説明するための図である。
【図6】同実施形態に係る異物除去システムの吹き付け装置を説明するための図である。
【図7A】同実施形態に係る異物除去システムによる異物除去方法を示すフロー図である。
【図7B】同実施形態に係る異物除去システムによる異物除去方法を示すフロー図である。
【図8】同実施形態に係る異物除去システムにより異物除去を実行している状態を説明するための図である。
【図9】同実施形態に係る異物除去システムの吸引管を清掃している状態を説明するための図である。
【図10】同実施形態の変形例に係る異物除去方法を示すフロー図である。
【発明を実施するための形態】
【0012】
以下、本発明を実施するための形態について、添付の図面を参照して、詳細に説明する。なお、本発明は、以下に説明する実施形態に限定されるものではない。
【0013】
なお、説明は以下の順序で行うものとする。
1.本発明の実施形態に係る異物除去システム1の機能構成について
2−1.同実施形態に係る異物除去方法について
2−2.同実施形態に係る変形例について
【0014】
<1.本発明の実施形態に係る異物除去システム1の機能構成について>
まず、図1〜図6を参照しながら、本発明の実施形態に係る異物除去システム1の機能構成について説明する。図1は、同実施形態に係る異物除去システム1を説明するための図である。また、図2は、異物除去システム1で異物除去される馬鈴薯生地の写真図である。また、図3〜図6は、夫々、順に、異物除去システム1に係る照明3、撮影装置4、圧力センサ7、吹き付け装置10を説明するための図である。
【0015】
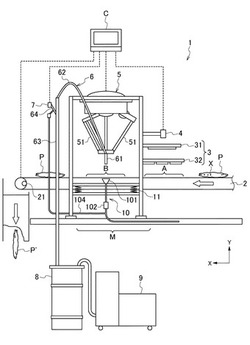
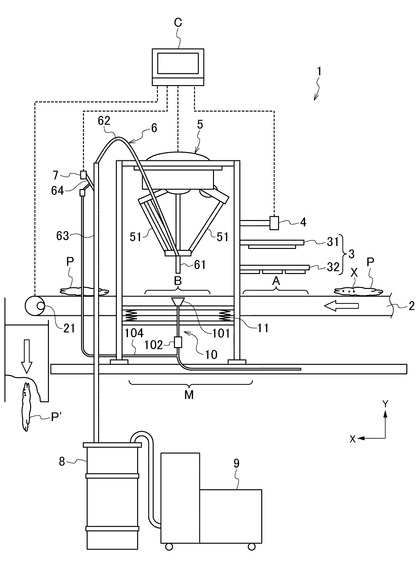
図1に示す異物除去システム1は、食品中の異物を除去するためのシステムである。異物除去システム1で異物を除去される食品は、どのような食品であってもよいが、例えば、蒸して裏ごしされ、粘性を有する馬鈴薯生地、コロッケ、ポテトサラダ、芋団子等が挙げられる。そこで、本実施形態では、上記馬鈴薯生地Pを例に説明する。すなわち、本実施形態に係る異物除去システム1は、馬鈴薯を原材料とする菓子食品等の製造過程に導入されるシステムである。本実施形態に係る異物除去システム1では、吸引管により異物の吸引を繰り返しても、吸引管の詰まりを正確且つ速やかに解消することが可能になる。
【0016】
なお、図1に示すX方向とは、馬鈴薯生地Pが搬送装置で搬送される方向、すなわち上流(例えば、原料を搬送装置2に供給する側)から下流(例えば、搬送された馬鈴薯生地Pを次工程に処理する側)に向かう方向を指す。また、図1に示すY方向とは、馬鈴薯生地Pの異物を吸引管の先端部分が吸引する方向、すなわち、上方向を指し、上記X方向と直交する方向を指す。なお、後述する図8、図9における、X方向、Y方向も図1に示すX方向、Y方向と同一であるため、以下ではその説明を省略する。
【0017】
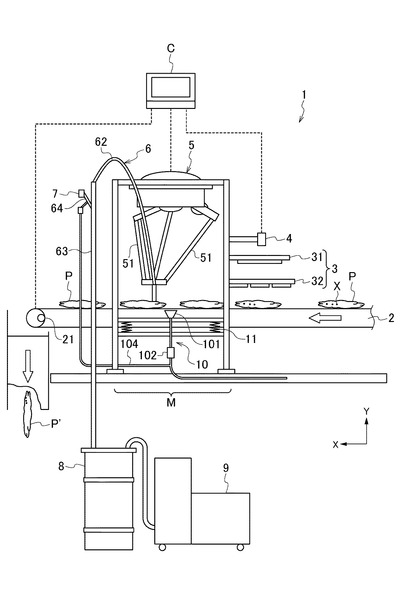
図1に示すように、異物除去システム1は、馬鈴薯生地Pを搬送する搬送装置2と、馬鈴薯生地Pを照らす照明3と、コンピュータcに予め設定された食品撮影位置Aで馬鈴薯生地Pを撮影する撮影装置4とを有する。また、異物除去システム1は、馬鈴薯生地Pの画像情報を生成し、馬鈴薯生地P中の異物xの存在を判定し、異物xの異物位置情報を生成し、異物xが除去される位置を決定するコンピュータcを有する。更に、異物除去システム1は、撮影装置に対し下流側に設けられ、コンピュータcに予め設定された異物除去位置Bで馬鈴薯生地P中の異物xを除去する異物除去手段Mを備える。当該異物除去手段Mは、上記異物xを吸引する吸引管6と、吸引管6の内部の圧力を検知する圧力センサ7と、圧力が所定の閾値以下である回数が予め設定された回数に達した場合に吸引管6の内部に気体を吹き付ける吹き付け装置10とを有する。
【0018】
搬送装置2は、馬鈴薯生地Pを上流から下流に搬送する。搬送される馬鈴薯生地Pについては、裏ごしされており、塊状の形状を有する(図2参照)。そして、異物が混在した状態で搬送されてくる。また、搬送装置2は、図1に示すように、異物xが取り除かれた馬鈴薯生地Pを次の工程(例えば、馬鈴薯生地Pの味付け工程等)に良品P’として移送する。搬送装置2は、馬鈴薯生地Pを搬送することが可能であれば、形状、機能等については特に限定されないが、例えば、ベルトコンベアやプラスチックコンベア等が挙げられる。当該ベルトコンベアやプラスチックコンベア等は、後述する撮影装置4による馬鈴薯生地Pの撮影のために、光が透過しないように構成されていることが望ましい。
【0019】
また、搬送装置2の馬鈴薯生地Pを搬送する搬送速度も特に限定されず、馬鈴薯生地Pの最終製品の生産量等に応じて調節することが可能である。また、図1に示すように、搬送装置2にはエンコーダ21が設けられていてもよい。そして、エンコーダ21が上記搬送距離を計測し、後述するコンピュータcに搬送距離に関する情報を送信してよい。
【0020】
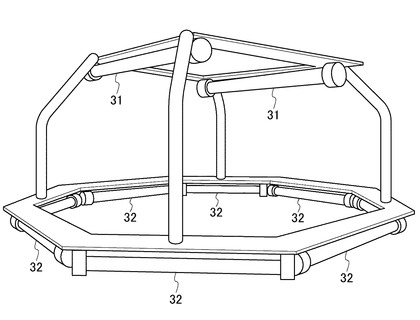
照明3は、搬送装置2上で搬送される馬鈴薯生地Pを照らす。特に限定はされないが、照明3は、馬鈴薯生地Pが搬送装置2により搬送されている間、常時点灯されていてよい。照明3としては、LED、もしくは高周波インバーターの蛍光灯が好適に用いられる。また、照明3の設置位置や、形状等については特に限定されないが、例えば、図1に示すように、照明3は、後述する撮影装置4の下部又は周辺に設けられる。そのため、異物除去システム1では、照明3を備えることで、撮影装置4により撮影された馬鈴薯生地Pの画像情報中における異物xの認識精度を向上させることが可能である。
【0021】
また、照明3は、第1照明31及び第2照明32を有し、2段に形成されていてもよい。例えば、図3に示すように、照明3は、2つの第1照明31と、8つの第2照明32とから構成される。このように、異物除去システム1では、照明3が2段に形成されることで、多方面から馬鈴薯生地Pを照らすこととなり、馬鈴薯生地Pの画像情報中における異物xの認識精度をより向上させることが可能である。
【0022】
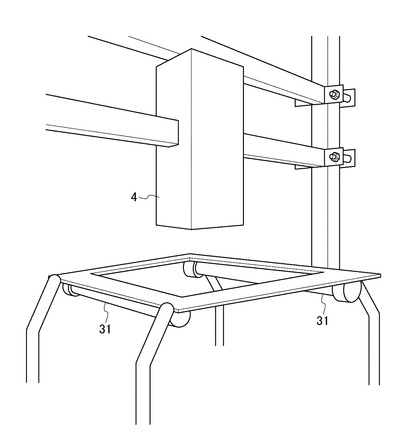
撮影装置4は、図1に示すように、搬送される馬鈴薯生地Pを食品撮影位置Aで自動撮影する。撮影装置4は、搬送装置2が馬鈴薯生地Pを搬送している間、常時作動していてよい。食品撮影位置Aとは、撮影装置4の下方の位置を指し、コンピュータcに予め設定されているものである。また、撮影装置4は、どのような装置であってもよいが、例えば、図4に示すように、直方体形状に形成されたデジタルビデオカメラである。
【0023】
図1に示すコンピュータcは、馬鈴薯生地Pの画像情報を生成し、馬鈴薯生地P中の異物xの存在を判定し、異物xの異物位置情報を生成し、異物xが除去される除去時刻を算出する。より具体的には、コンピュータcのCPU(Central Processing Unit)が、後述する画像情報生成手段、異物判定手段、異物位置情報生成手段、及び距離情報算出手段による処理を主に実行する。なお、コンピュータcとしては、例えば、デスクトップ型PCやノート型PCなど様々なコンピュータを用いることが可能である。
【0024】
画像情報生成手段は、上述した撮影装置4による馬鈴薯生地Pの撮影により、馬鈴薯生地Pの画像情報を生成する。当該画像情報が生成されることで、後述するように、コンピュータcは異物xの異物位置情報及び馬鈴薯生地Pの距離情報を算出し、吸引管6が適当なタイミングにおいて正確な位置で異物xを吸引することが可能になる。
【0025】
異物判定手段は、画像情報においてコンピュータcに予め設定された色情報に対応する色情報を有するエリアを異物xとして判定する。馬鈴薯生地P中の異物xは、馬鈴薯の皮が主たる成分であるので、異物判定手段は、白色又は黄色を有する馬鈴薯生地Pに対し茶色等に変色した領域を異物として判定する。
【0026】
また、異物判定手段は、上記茶色等の領域が所定の面積以下の大きさである場合には、当該領域を異物として判定しなくてもよい。このように、面積の非常に小さい上記茶色等の領域については、異物判定手段が異物として判定しないことで、吸引管6が本来吸引する必要のない馬鈴薯生地Pの吸引の抑制が可能になる。上記面積については、例えば、馬鈴薯生地Pの種類、馬鈴薯生地Pの搬送速度、又は吸引管6の吸引口の内径等に応じて適宜調節されてよい。
【0027】
異物位置情報生成手段は、異物判定手段が馬鈴薯生地P中の異物xの存在を判定することにより、異物xの存在エリアに関する異物位置情報を生成する。存在エリアとは、馬鈴薯生地P中の異物xの存在する領域を指す。すなわち、異物位置情報とは、馬鈴薯生地P中のどの位置に異物xが存在しているのかを表す情報である。上記異物位置情報により、コンピュータcは、後述する吸引管制御装置5に吸引管6の異物xの吸引位置を調節させることが可能になる。
【0028】
距離情報算出手段は、馬鈴薯生地Pが食品撮影位置Aから搬送された距離に関する距離情報を算出する。より具体的には、距離情報算出手段は、例えば、搬送装置2の駆動部に付属するエンコーダ21のパルス情報に基づいて、馬鈴薯生地Pが食品撮影位置Aから搬送された距離に関する距離情報を算出する。そのため、異物除去システム1では、上記距離情報及び上記異物位置情報に基づいて異物xが除去される位置を正確に認識することが可能になる。これにより、コンピュータcでは、吸引管6による異物xを吸引する位置を正確に制御することが可能になる。
【0029】
一例として、図1に示すように、まず、食品撮影位置Aにおいて撮影装置4により撮影された馬鈴薯生地Pが、αパルス分(例えば、0.5mm/1パルス)進むことで異物除去位置Bのエリアに入る。そして、コンピュータcから吸引管制御装置5に、異物xを除去するための距離情報及び異物位置情報を含む除去信号が送られ、吸引管6は正確な位置で異物xを除去することが可能となる。
【0030】
また、コンピュータcには、更に異物除去時刻算出手段が含まれていてもよい。異物除去時刻算出手段は、食品撮影位置Aと異物除去位置Bとの間の距離及び搬送装置2の搬送速度に基づいて異物xが除去される除去時刻を算出する。例えば、時刻;x時y分z秒に馬鈴薯生地Pが撮影され、食品撮影位置Aと異物除去位置Bとの間隔が2αメートルであり、搬送装置2の搬送速度が秒速αメートルである場合、上記時刻の2秒後である、時刻;x時y分(z+2)秒が、除去時刻となる。これにより、コンピュータcでは、吸引管6による異物xを吸引するタイミングを正確に制御することが可能になる。
【0031】
次に、異物除去手段Mの主たる構成である吸引管制御装置5、吸引管6、圧力センサ7、吹き付け装置10の機能構成について説明する。
【0032】
吸引管制御装置5は、上記異物位置情報に基づいて、吸引管6の先端部分61を移動させる。吸引管制御装置5の形状等は、吸引管6の位置制御が可能であれば、特に限定されないが、例えば、図1に示すように、複数個の脚部51を有し、脚部51が吸引管6の先端部分61を挟持する。このように、吸引管制御装置5が吸引管6を支持することで、異物除去システム1では、吸引管6が異物xを正確な位置で吸引することが可能になる。また、吸引管制御装置5が吸引管6を支持することで、後述する吹き付け装置10により吸引管6が気体を吹き付けられている場合にも、上記気体によって吸引管6が動いてしまうことが防止される。
【0033】
吸引管6は、上記距離情報及び上記異物位置情報に基づいて、異物除去位置Bまで搬送された異物xを先端部分61から吸引する。吸引管6の形状等については、適切な位置で異物xを吸引することが可能であれば、特に限定されないが、例えば、図1に示すように、先端部分61と、先端部分61に連続して形成された屈曲部62と、屈曲部62の下方に形成された配管63と、吸引管6の途中箇所から分岐した分岐管64とが設けられる。この場合、先端部分61は、異物xが凝着してしまうことを防止するために、フッ素樹脂を有していてもよい。また、屈曲部62において異物xが滞留してしまうことを防止するために、吸引管6は、テフロン(登録商標)性の材質を有していてよい。
【0034】
また、吸引管6の内径については、馬鈴薯生地Pのサイズ等に応じて、馬鈴薯生地Pの径より小さくするように調整してよい。例えば、馬鈴薯生地Pが7mm程度の格子で裏ごしされてから、搬送装置2により搬送される場合、吸引管6が馬鈴薯生地Pを吸引しないように、吸引管6を4〜5mm程度の内径に設計することが可能である。
【0035】
そして、吸引管6による吸引は、吸引機9が起動することにより行われ、吸引された異物xが異物捕集部8に補集される。吸引機9の吸引力等については、特に限定されるものではなく、馬鈴薯生地Pの粘性の程度や、馬鈴薯生地Pの搬送速度等に応じて調整可能なものであってよい。また、異物捕集部8のサイズ等についても、特に限定されるものではなく、搬送される馬鈴薯生地P中の異物xの量等に応じて適宜設定されてよい。
【0036】
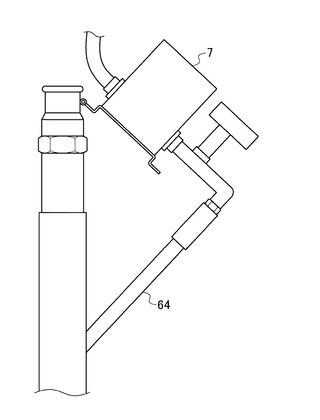
圧力センサ7は、形状等については、特に限定されないが、例えば、図5に示すように、吸引管6の分岐管64に設けられ、吸引管6が異物xを吸引する際の圧力を検知する。より具体的には、圧力センサ7は、例えば、吸引管6が異物xを吸引していない状態の吸引管6の内部の圧力と、異物xを吸引している最中の吸引管6の内部の圧力との圧力差を監視する。そして、圧力(圧力差)が所定の閾値以下である回数が予め設定された回数に達した場合に、後述する吹き付け装置10が、吸引管6に気体を吹き付ける。上記所定の閾値は、容易に任意設定できるものとする。
【0037】
この点、関連技術に係る異物除去システムでは、吸引管の吸引回数が所定の回数を超えた場合に、吹き付け装置が自動的に吸引管に気体を吹き付けるというシステムのものがある。すなわち、上記関連技術に係る異物除去システムでは、吸引管に詰まりが生じていない場合においても、吸引管の吸引回数が上記所定の回数を超えると、吹き付け装置が気体を吹き付ける。このような異物除去システムでは、吸引管の吸引回数が上記所定の回数に達する前に既に吸引管に詰まりが生じる場合がある。そのため、この場合、吹き付け装置は吸引管に気体を吹き付けず、吸引管による異物xの吸引が困難になる。
【0038】
また、上記関連技術に係る異物除去システムでは、吸引管にほとんど詰まりが生じていない状態で、吸引管の吸引回数が上記所定の回数に達する場合がある。このような場合に、吹き付け装置が気体を吹き付けた際には、吸引管内部に蓄積された馬鈴薯生地Pや馬鈴薯生地Pの皮等が吸引管の内壁にへばりついてしまうことがある。そのため、一旦上記内壁にへばりついた馬鈴薯生地Pや馬鈴薯生地Pの皮等の接着力は非常に強く、以後、吹き付け装置が吸引管に気体を吹き付けても、却って異物x等を取り除くことが困難になることがある。
【0039】
これに対し、本実施形態に係る圧力センサ7では、吸引管6内部の圧力が所定の閾値以下である回数が予め設定された回数に達する毎に、すなわち、吸引管6に詰まりが生じた場合に、吹き付け装置10が吸引管6に気体を吹き付ける。そのため、異物除去システム1では、吸引管6による異物xの吸引を繰り返しても、吸引管6内部に異物x等を蓄積してしまうことを防止でき、吸引管6の詰まりを精度良く且つ速やかに解消することができる。
【0040】
また、吸引管6が異物xの吸引を繰り返すことで、異物x等が内部に蓄積していない状態で吸引管6が異物xを吸引する際の圧力の低下等による圧力変動が生じる場合がある。この点、異物除去システム1では、吸引開始寸前に上記圧力変動に応じて上記所定の閾値を設定することが可能である。そのため、例えば、吸引管6の内部に異物x等の詰まりが生じていないにも関わらず、吹き付け装置10が吸引管6の内部に向けて気体を吹き付けてしまうことを防止することができる。
【0041】
更に、上記予め設定された回数については、特に限定されるものではないが、2回以上に設定されることが好適である。異物除去システム1では、例えば、吸引管6の内部に異物x等が蓄積はしていないものの、吸引管6の不具合等により、吸引管6が異物xを吸引する際の圧力がたまたま所定の閾値以下になる可能性がある。このような場合においても、上記予め設定された回数が2回以上に設定されることで、吹き付け装置10が誤って吸引管6の内部に向けて気体を吹き付けることを防止することができる。
【0042】
吹き付け装置10は、圧力センサ7の圧力値が所定の閾値以下である回数が予め設定された回数に達する毎に、吸引管6の内部に向けて気体を吹き付ける。そのため、異物除去システム1では、適当なタイミングで吸引管6の内部の清掃が実行され、吸引管6の詰まりを精度良く且つ速やかに解消することができる。
【0043】
この点、関連技術に係る異物除去システムでは、吹き付け装置10で吸引管6の内部に気体を吹き付ける代わりに、吸引管の内部を水で清掃するものがある。このような関連技術に係る異物除去システムでは、水で流し切れなかった馬鈴薯生地Pや馬鈴薯生地Pの皮等が吸引管6の内壁にへばりつくことがある。そのため、一旦上記内壁にへばりついた馬鈴薯生地Pや馬鈴薯生地Pの皮等の接着力は非常に強く、上記関連技術に係る異物除去システムでは、以後、吸引管に水を流しても、馬鈴薯生地Pや馬鈴薯生地Pの皮等を取り除くことが却って困難になることがある。
【0044】
これに対し、本実施形態に係る異物除去システム1では、吹き付け装置10が吸引管6の内部に向けて気体を吹き付けて、吸引管6の内部の清掃をするため、吸引管6が異物の吸引を繰り返しても、吸引管6の詰まりを容易に解消することができる。
【0045】
図1に示すように、吹き付け装置10の管104には、2つの電磁弁102、103が形成されている。電磁弁102、103により、吹き付け装置10では、吸引管6の内部に対する気体の吹き付け位置の調節をする。より具体的には、本実施形態に係る吹き付け装置10は、吸引管6の先端部分61又は分岐管64に向けて気体を吹き付けることが可能である。なお、上記吹き付け位置の調節は、例えば、コンピュータcで行われる。
【0046】
ここで、まず、吹き付け装置10が吸引管6の先端部分61に気体を吹き付け、内部の清掃を実行する場合について説明する。吹き付け装置10には、気体の吹き出し口が漏斗状に広がる漏斗状部101が形成されている。圧力センサ7の圧力値が所定の閾値以下である回数が予め設定された回数に達する毎に、吸引管制御装置5が、吸引管6の先端部分61を漏斗状部101に対向する位置に移動させる。そして、吹き付け装置10は、漏斗状部101から吸引管6の先端部分61に気体を吹き付ける。漏斗状部101は、気体の吹き出し口が漏斗状に広がっているため、吹き付け装置10では、吸引管6の内部に確実に気体を吹き付けることが可能になる。なお、上記気体としては、特に限定されないが、例えば、空気、酸素、窒素等が挙げられる。
【0047】
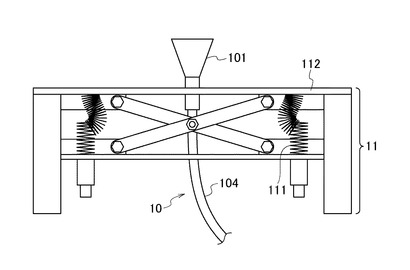
また、吹き付け装置10の漏斗状部101は、図6に示すように、吹き出し口側に向けて弾性部材11により付勢されていてもよい。弾性部材11は、バネ111と、板112とを主に有する。上記漏斗状部101は、弾性部材11の弾性力を受けた板112により、吹き出し口側に向けて付勢される。これにより、吹き付け装置10が吸引管6の内部に気体を吹き付ける際に、吹き付け装置10の漏斗状部101と吸引管6の先端部分61とを安定に固定しながら、吹き付け装置10は、吸引管6の内部に気体を吹き付けることが可能になる。
【0048】
また、一方で、吹き付け装置10が漏斗状部101から吸引管6の先端部分61を介して内部に気体を吹き付ける代わりに、吹き付け装置10では、図1に示すように、分岐管64に気体を吹き付けることも可能である。このようにして、異物除去システム1では、内部に比較的馬鈴薯生地Pや異物xが詰まりやすい圧力センサ7と配管63との分岐管64に気体を吹き付けて、吸引管の詰まりを精度良く且つ速やかに解消することが可能になる。
【0049】
<2−1.本発明の実施形態に係る異物処理方法について>
次に、図7A〜図10を参照しながら、異物除去システム1が馬鈴薯生地P中の異物xを除去する流れについて説明する。図7A及び図7Bは、本発明の実施形態に係る異物処理方法を示すフロー図である。また、図8は、本実施形態に係る異物除去システム1において、吸引管6が異物xを吸引している状態を説明するための図である。また、図9は、本実施形態に係る異物除去システム1において、吹き付け装置10が吸引管6の先端部分61を介して内部に気体を吹き付けている状態を説明するための図である。また、図10は、本実施形態の変形例に係る異物除去システムを説明するための図である。
【0050】
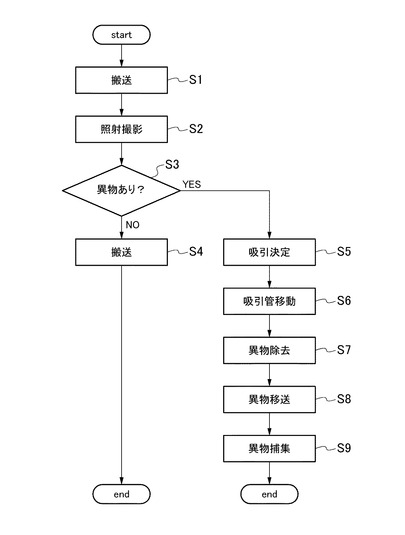
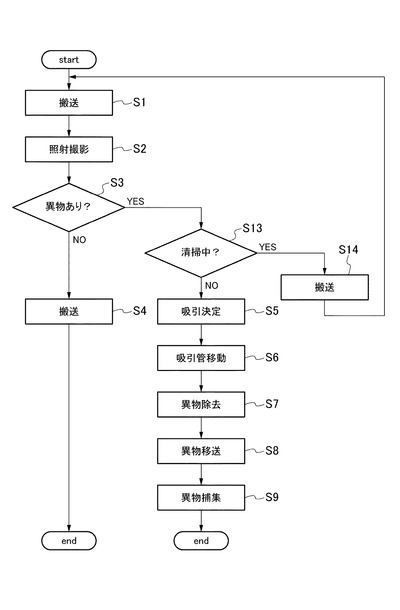
まず、図7Aに示すように、ステップS1では、裏ごしされた馬鈴薯生地Pが搬送装置2によって上流側から下流側に向けて搬送される。馬鈴薯生地Pが搬送装置2によって搬送されることで、後述するように、異物除去システム1では、馬鈴薯生地P中の異物xを検出し、異物xを除去することが可能になる。
【0051】
次に、ステップS2では、まず、照明3が馬鈴薯生地Pを照らしつつ、撮影装置4が食品撮影位置Aで馬鈴薯生地Pを撮影する。撮影装置4は、馬鈴薯生地Pが搬送装置2により搬送されている間、常時作動していてよく、食品撮影位置Aを通過する馬鈴薯生地Pを常時撮影する。そして、撮影装置4による馬鈴薯生地Pの撮影により、画像情報生成手段は、馬鈴薯生地Pの画像情報を生成する。
【0052】
次に、ステップS3では、まず、異物判定手段が、上記画像情報においてコンピュータに予め設定された色情報に対応する色情報を有するエリアを異物として判定する。具体的には、馬鈴薯生地Pが有する白色又は黄色の色情報のみが画像情報に含まれているのか、皮等の異物xが有する茶色等の色情報が画像情報に含まれているのか否かを判定する。異物判定手段は、白色又は黄色の色情報のみが画像情報に含まれている場合には、異物xは存在しないものと判定し、茶色等の色情報が画像情報に含まれている場合には、異物xが存在するものと判定する。
【0053】
この際、異物判定手段は、上記茶色等の領域が所定の面積以下の大きさである場合には、当該領域を異物として判定しなくてもよい。異物判定手段が面積の非常に小さい上記茶色の領域を異物として判定しないことで、吸引管6が本来吸引する必要のない馬鈴薯生地Pの吸引が防止可能である。
【0054】
次に、馬鈴薯生地P中に異物xが存在しないと判定された場合、ステップS4では、搬送装置2が馬鈴薯生地Pを搬送する。そして、馬鈴薯生地Pは、次の工程(例えば、馬鈴薯生地Pの味付け工程等)に良品P’として移送される。
【0055】
一方、馬鈴薯生地P中に異物xが存在すると判定された場合、ステップS5では、異物xを除去することが決定される。具体的には、まず、異物位置情報生成手段が異物xの存在エリアに関する異物位置情報を生成する。この異物位置情報により、馬鈴薯生地P中のどの位置に異物xが存在するのかが特定される。そして、距離情報算出手段が、搬送装置2の搬送距離に基づいて、馬鈴薯生地Pが食品撮影位置Aから搬送された距離に関する距離情報を算出する。
【0056】
次に、ステップS6では、吸引管制御装置5が、上記距離情報及び上記異物位置情報に基づいて、吸引管6の先端部分61を移動させる。より具体的には、図8に図示するように、吸引管制御装置5は、異物除去位置Bに搬送された馬鈴薯生地P中の異物xが存在するエリアに吸引管6の先端部分61の位置を調整する。
【0057】
次に、図7Aに示すように、ステップS7では、吸引管6が上記異物除去位置まで搬送された異物xを吸引することで、馬鈴薯生地P中の異物xを除去する。そして、ステップS8では、吸引された異物xは、配管63内に移送され、ステップS9では、異物xが、異物捕集部8に捕集される。
【0058】
また、異物除去システム1では、ステップS1〜S9で実行される処理と並行して、図7Bに示す処理が実行される。ここで、当該処理について、図7Bを参照しながら説明する。
【0059】
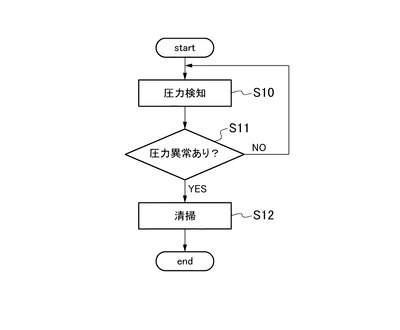
まず、図7Bに示すように、ステップS10では、圧力センサ7が、吸引管6の内部の圧力差を監視することで圧力を検知する。搬送装置2が馬鈴薯生地Pを搬送している間、圧力センサ7は常時起動していてもよい
【0060】
次に、ステップS11では、圧力センサ7において、吸引管6の内部の圧力が所定の閾値以下である回数が予め設定された回数に達したか否かを判定する。これにより、上記圧力に異常があるか否かを判定する。吸引管6の内部の圧力が所定の閾値以下である回数が予め設定された回数に達していない場合には、再びステップS10において、圧力センサ7が、吸引管6の内部の圧力差を監視することで圧力を検知する。
【0061】
一方、ステップS12では、吸引管6の内部の圧力が所定の閾値が所定の閾値以下である回数が予め設定された回数に達した場合には、吹き付け装置10が吸引管6の内部に向けて気体を吹き付け、内部の清掃を実行する。吹き付け装置10は、吸引管6の先端部分61又は分岐管64に向けて気体を吹き付ける。
【0062】
ここで、図9を参照しながら、吹き付け装置10が吸引管6の内部に向けて気体を吹き付ける状態について説明する。図9に示すように、吸引管制御装置5が、吸引管6の先端部分61を漏斗状部101に対向する位置に移動させる。そして、吹き付け装置10が、先端部分61を介して吸引管6の内部に向けて気体を吹き付ける。
【0063】
一方で、吹き付け装置10が分岐管64に気体を吹き込む場合には、電磁弁102、103により気体の吹き付け位置が変更される。電磁弁102、103の制御については、コンピュータcが行うことができる。
【0064】
以上説明したように、本実施形態に係る異物除去システム1では、圧力センサ7が吸引管6の内部の圧力差を監視し圧力を検知することで、圧力が所定の閾値以下である回数が予め設定された回数に達する毎に、吹き付け装置10が吸引管6の内部に向けて気体を吹き付ける。そのため、異物除去システム1では、吸引管6の詰まりを精度良く且つ速やかに解消することができる。また、吹き付け装置10は、気体を漏斗状部101から先端部分61を介して吸引管6の内部に吹き付け、更に、分岐管64に気体を吹き付けることも可能である。そのため、吹き付け装置10は、吸引管6内部の詰まりの状況(例えば、先端部分61側が詰まっているか、分岐管64付近が詰まっているかについて)に応じて、吹き付け位置を変更することができ、吸引管6の詰まりをより正確に解消することができる。
【0065】
また、吹き付け装置10は、吸引管6の先端部分61を介して気体を吹き付ける際の吹き出し口に漏斗状部101を有することが可能である。そのため、吸引管6内部に吹き付ける気体の漏れを防止することで、吸引管6の詰まりをより正確且つ速やかに解消することができる。
【0066】
また、吹き付け装置10の漏斗状部101は、吹き出し口側に向けて弾性部材11によって付勢されていてもよい。この場合、吹き付け装置10が吸引管6の内部に気体を吹き付ける際にも、吹き付け装置10が動いてしまうことを防止し、吹き付け装置10の漏斗状部101と吸引管6の先端部分61とを安定に固定することができ、吸引管6の詰まりをより正確に解消することができる。
【0067】
<2−2.本実施形態に係る変形例について>
次に、本実施形態の変形例に係る異物除去システムの異物除去方法について、図7B及び図10を参照しながら説明する。なお、本変形例において、本実施形態と実質的に同一の構成、除去内容については、同一の符号を付することにより重複説明を省略する。
【0068】
図1を主に参照しながら説明した本実施形態の機能構成と比し、本変形例の機能構成では、搬送装置のみが異なる。また、本変形例に係る異物除去方法は、図7A及び図7Bを主に参照しながら説明した本実施形態の異物除去方法と比し、ステップS13における処理のみが異なるので、ここでは、ステップS13における処理内容についてのみ説明する。
【0069】
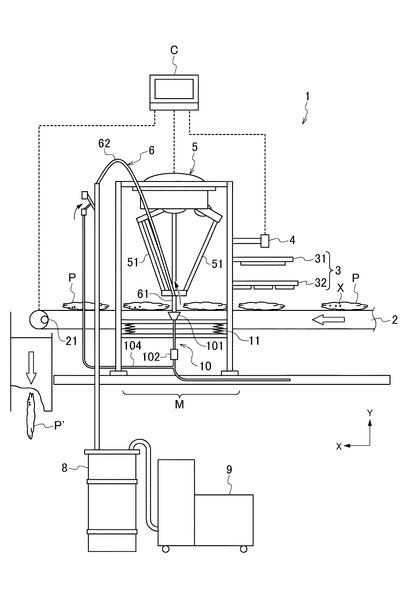
本変形例に係る搬送装置は、食品を搬送する第1搬送装置と、吹き付け装置10が吸引管6の内部に向けて気体を吹き付けている間に異物除去されずに搬送された馬鈴薯生地Pを下流から上流に向けて搬送し、馬鈴薯生地Pを第1搬送装置に搬送させる第2搬送装置から構成される。
【0070】
この構成によれば、ステップS3において、馬鈴薯生地P中に異物xが存在するものと判定され、且つステップS13において、吸引管6が吹き付け装置10により内部の清掃が実行されている場合であっても、馬鈴薯生地Pの異物xの除去をより確実に実行することが可能になる。すなわち、第2搬送装置は、このような馬鈴薯生地Pを、例えば、上記良品P’が移送されていく経路とは別に、下流から上流に向けて搬送し、再度第1搬送装置に搬送させる。そのため、本変形例に係る異物除去システムでは、異物除去をより精度よく実行することができる。
【産業上の利用可能性】
【0071】
本発明は、食品中の異物除去システムとして利用することができる。これにより、馬鈴薯の加工食品等において、馬鈴薯の皮等が製品に混在してしまうことを防止することができる。そのため、品質が優れた製品を提供することができる。
【符号の説明】
【0072】
1:異物除去システム、2:搬送装置、4:撮影装置、5:吸引管制御装置、6:吸引管、61:先端部分、7:圧力センサ、10:吹き付け装置、101:漏斗状部、c:コンピュータ、M:異物除去手段、P:馬鈴薯生地、x:異物
【技術分野】
【0001】
本発明は、異物除去システムに関する。より詳しくは、コンピュータを利用し、食品の異物除去を行う異物除去システムに関する。
【背景技術】
【0002】
食品が市場に流通する際、品質の確保等のために異物が混入していないことが求められる。しかし、上記異物を人が手作業で取り除くことは非常に煩雑なものである。そのため、機械作業により異物を取り除く方法が提案されている。
【0003】
例えば、特許文献1では、もやしの中の異物を除去する装置に関する技術が開示されている。そして、特許文献2では、椎茸に付着したゴミ等の異物を除去する装置に関する技術が開示されている。このような技術では、人による手作業に比べ、効率的且つ正確に異物を除去することができる。
【0004】
また、近年、馬鈴薯(じゃがいも)等を原材料にした加工食品が市場に流通しており、上記特許文献1、2に開示の技術と同様に機械作業により異物を除去する方法が提案されている。上記加工食品は馬鈴薯の皮以外の部分を主原料として製造されるが、取り除き切れなかった皮等が加工食品中に異物として混入してしまう懸念がある。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開平10−150967号公報
【特許文献2】特開2004−050106号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
上記懸念に対し、本願発明者らの鋭意検討の結果、馬鈴薯等を原材料にした加工食品の製造過程において、馬鈴薯を裏ごしした生地の状態で異物を吸引する方法が、異物を効率的且つ正確に取り除く方法であることを見出した。
【0007】
しかしながら、上記異物の吸引を繰り返し行うと、異物と共に吸引した微量の生地等が蓄積し、吸引管が詰まってしまうという問題があった。吸引管が一旦詰まってしまうと、吸引力の低下のために、以後、異物の吸引を正常に行うことはできず、吸引作業を一旦中断して詰まりを解消する必要があった。そのため、上記加工食品を大量に効率良く製造するために、吸引管の詰まりを精度良く且つ速やかに解消することができる異物除去システムが希求されていた。
【0008】
そこで、本発明は、上記課題に鑑みてなされたものであり、本発明の目的とするところは、異物の吸引を繰り返しても、吸引管の詰まりを精度良く且つ速やかに解消することが可能な、新規かつ改良された異物除去システムを提供することにある。
【課題を解決するための手段】
【0009】
本発明に係る異物除去システムは、コンピュータを利用し、食品の異物除去を行う異物除去システムであって、食品を搬送する搬送装置と、上記食品をコンピュータに予め設定された食品撮影位置で自動撮影する撮影装置と、当該撮影装置に対し下流側に設けられ、予め設定された異物除去位置で上記食品中の異物を除去する異物除去手段と、上記撮影装置の撮影により食品の画像情報を生成する画像情報生成手段と、上記画像情報においてコンピュータに予め設定された色情報に対応する色情報を有するエリアを異物として判定する異物判定手段と、上記異物判定手段の判定により上記異物の存在エリアに関する異物位置情報を生成する異物位置情報生成手段と、上記搬送装置の搬送距離に基づいて、上記食品が上記食品撮影位置から搬送された距離に関する距離情報を算出する距離情報算出手段と、を備え、上記異物除去手段は、上記距離情報及び上記異物位置情報に基づいて、上記異物除去位置まで搬送された上記異物を先端部分から吸引する吸引管と、上記吸引管が上記異物を吸引する際の圧力を検知する圧力センサと、上記圧力が所定の閾値以下である回数が予め設定された回数に達する毎に、上記吸引管の内部に向けて気体を吹き付ける吹き付け装置と、を有する異物除去システムである。
また、上記予め設定された回数は2回以上であることが好適である。
また、上記異物除去システムは、上記距離情報及び上記異物位置情報に基づいて、上記吸引管の先端部分を移動させる吸引管制御装置を更に有していてもよい。
また、上記吹き付け装置には、上記気体の吹き出し口が漏斗状に広がる漏斗状部が形成されており、上記圧力が所定の閾値以下である回数が予め設定された回数に達する毎に、上記吸引管制御装置は、上記吸引管の先端部分を上記漏斗状部に対向する位置に移動させ、上記吹き付け装置は、上記漏斗状部から上記吸引管の内部に気体を吹き付けてもよい。
また、上記漏斗状部は、上記吹き出し口側に向けて弾性部材によって付勢されていてもよい。
また、上記圧力センサは、上記吸引管の途中箇所から分岐した分岐管に設けられていてもよい。
また、上記圧力が所定の閾値以下である回数が予め設定された回数に達する毎に、上記吹き付け装置は、上記分岐管に気体を吹き付けてもよい。
また、上記食品は、例えば、裏ごしされた馬鈴薯であってよい。
また、上記搬送装置は、例えば、ベルトコンベア又はプラスチックコンベアであってもよい。
また、上記搬送装置は、食品を搬送する第1搬送装置と、上記吹き付け装置が上記吸引管の内部に向けて気体を吹き付けている間に、異物除去されずに搬送された上記食品を下流から上流に向けて搬送し、上記食品を第1搬送装置に搬送させる第2搬送装置と、を有していてもよい。
【発明の効果】
【0010】
本発明によれば、異物の吸引を繰り返しても、吸引管の詰まりを精度良く且つ速やかに解消することが可能になる。
【図面の簡単な説明】
【0011】
【図1】本発明の実施形態に係る異物除去システムを説明するための図である。
【図2】同実施形態に係る異物除去システムで異物除去される馬鈴薯生地Pの写真図である。
【図3】同実施形態に係る異物除去システムの照明を説明するための図である。
【図4】同実施形態に係る異物除去システムの撮影装置を説明するための図である。
【図5】同実施形態に係る異物除去システムの圧力センサを説明するための図である。
【図6】同実施形態に係る異物除去システムの吹き付け装置を説明するための図である。
【図7A】同実施形態に係る異物除去システムによる異物除去方法を示すフロー図である。
【図7B】同実施形態に係る異物除去システムによる異物除去方法を示すフロー図である。
【図8】同実施形態に係る異物除去システムにより異物除去を実行している状態を説明するための図である。
【図9】同実施形態に係る異物除去システムの吸引管を清掃している状態を説明するための図である。
【図10】同実施形態の変形例に係る異物除去方法を示すフロー図である。
【発明を実施するための形態】
【0012】
以下、本発明を実施するための形態について、添付の図面を参照して、詳細に説明する。なお、本発明は、以下に説明する実施形態に限定されるものではない。
【0013】
なお、説明は以下の順序で行うものとする。
1.本発明の実施形態に係る異物除去システム1の機能構成について
2−1.同実施形態に係る異物除去方法について
2−2.同実施形態に係る変形例について
【0014】
<1.本発明の実施形態に係る異物除去システム1の機能構成について>
まず、図1〜図6を参照しながら、本発明の実施形態に係る異物除去システム1の機能構成について説明する。図1は、同実施形態に係る異物除去システム1を説明するための図である。また、図2は、異物除去システム1で異物除去される馬鈴薯生地の写真図である。また、図3〜図6は、夫々、順に、異物除去システム1に係る照明3、撮影装置4、圧力センサ7、吹き付け装置10を説明するための図である。
【0015】
図1に示す異物除去システム1は、食品中の異物を除去するためのシステムである。異物除去システム1で異物を除去される食品は、どのような食品であってもよいが、例えば、蒸して裏ごしされ、粘性を有する馬鈴薯生地、コロッケ、ポテトサラダ、芋団子等が挙げられる。そこで、本実施形態では、上記馬鈴薯生地Pを例に説明する。すなわち、本実施形態に係る異物除去システム1は、馬鈴薯を原材料とする菓子食品等の製造過程に導入されるシステムである。本実施形態に係る異物除去システム1では、吸引管により異物の吸引を繰り返しても、吸引管の詰まりを正確且つ速やかに解消することが可能になる。
【0016】
なお、図1に示すX方向とは、馬鈴薯生地Pが搬送装置で搬送される方向、すなわち上流(例えば、原料を搬送装置2に供給する側)から下流(例えば、搬送された馬鈴薯生地Pを次工程に処理する側)に向かう方向を指す。また、図1に示すY方向とは、馬鈴薯生地Pの異物を吸引管の先端部分が吸引する方向、すなわち、上方向を指し、上記X方向と直交する方向を指す。なお、後述する図8、図9における、X方向、Y方向も図1に示すX方向、Y方向と同一であるため、以下ではその説明を省略する。
【0017】
図1に示すように、異物除去システム1は、馬鈴薯生地Pを搬送する搬送装置2と、馬鈴薯生地Pを照らす照明3と、コンピュータcに予め設定された食品撮影位置Aで馬鈴薯生地Pを撮影する撮影装置4とを有する。また、異物除去システム1は、馬鈴薯生地Pの画像情報を生成し、馬鈴薯生地P中の異物xの存在を判定し、異物xの異物位置情報を生成し、異物xが除去される位置を決定するコンピュータcを有する。更に、異物除去システム1は、撮影装置に対し下流側に設けられ、コンピュータcに予め設定された異物除去位置Bで馬鈴薯生地P中の異物xを除去する異物除去手段Mを備える。当該異物除去手段Mは、上記異物xを吸引する吸引管6と、吸引管6の内部の圧力を検知する圧力センサ7と、圧力が所定の閾値以下である回数が予め設定された回数に達した場合に吸引管6の内部に気体を吹き付ける吹き付け装置10とを有する。
【0018】
搬送装置2は、馬鈴薯生地Pを上流から下流に搬送する。搬送される馬鈴薯生地Pについては、裏ごしされており、塊状の形状を有する(図2参照)。そして、異物が混在した状態で搬送されてくる。また、搬送装置2は、図1に示すように、異物xが取り除かれた馬鈴薯生地Pを次の工程(例えば、馬鈴薯生地Pの味付け工程等)に良品P’として移送する。搬送装置2は、馬鈴薯生地Pを搬送することが可能であれば、形状、機能等については特に限定されないが、例えば、ベルトコンベアやプラスチックコンベア等が挙げられる。当該ベルトコンベアやプラスチックコンベア等は、後述する撮影装置4による馬鈴薯生地Pの撮影のために、光が透過しないように構成されていることが望ましい。
【0019】
また、搬送装置2の馬鈴薯生地Pを搬送する搬送速度も特に限定されず、馬鈴薯生地Pの最終製品の生産量等に応じて調節することが可能である。また、図1に示すように、搬送装置2にはエンコーダ21が設けられていてもよい。そして、エンコーダ21が上記搬送距離を計測し、後述するコンピュータcに搬送距離に関する情報を送信してよい。
【0020】
照明3は、搬送装置2上で搬送される馬鈴薯生地Pを照らす。特に限定はされないが、照明3は、馬鈴薯生地Pが搬送装置2により搬送されている間、常時点灯されていてよい。照明3としては、LED、もしくは高周波インバーターの蛍光灯が好適に用いられる。また、照明3の設置位置や、形状等については特に限定されないが、例えば、図1に示すように、照明3は、後述する撮影装置4の下部又は周辺に設けられる。そのため、異物除去システム1では、照明3を備えることで、撮影装置4により撮影された馬鈴薯生地Pの画像情報中における異物xの認識精度を向上させることが可能である。
【0021】
また、照明3は、第1照明31及び第2照明32を有し、2段に形成されていてもよい。例えば、図3に示すように、照明3は、2つの第1照明31と、8つの第2照明32とから構成される。このように、異物除去システム1では、照明3が2段に形成されることで、多方面から馬鈴薯生地Pを照らすこととなり、馬鈴薯生地Pの画像情報中における異物xの認識精度をより向上させることが可能である。
【0022】
撮影装置4は、図1に示すように、搬送される馬鈴薯生地Pを食品撮影位置Aで自動撮影する。撮影装置4は、搬送装置2が馬鈴薯生地Pを搬送している間、常時作動していてよい。食品撮影位置Aとは、撮影装置4の下方の位置を指し、コンピュータcに予め設定されているものである。また、撮影装置4は、どのような装置であってもよいが、例えば、図4に示すように、直方体形状に形成されたデジタルビデオカメラである。
【0023】
図1に示すコンピュータcは、馬鈴薯生地Pの画像情報を生成し、馬鈴薯生地P中の異物xの存在を判定し、異物xの異物位置情報を生成し、異物xが除去される除去時刻を算出する。より具体的には、コンピュータcのCPU(Central Processing Unit)が、後述する画像情報生成手段、異物判定手段、異物位置情報生成手段、及び距離情報算出手段による処理を主に実行する。なお、コンピュータcとしては、例えば、デスクトップ型PCやノート型PCなど様々なコンピュータを用いることが可能である。
【0024】
画像情報生成手段は、上述した撮影装置4による馬鈴薯生地Pの撮影により、馬鈴薯生地Pの画像情報を生成する。当該画像情報が生成されることで、後述するように、コンピュータcは異物xの異物位置情報及び馬鈴薯生地Pの距離情報を算出し、吸引管6が適当なタイミングにおいて正確な位置で異物xを吸引することが可能になる。
【0025】
異物判定手段は、画像情報においてコンピュータcに予め設定された色情報に対応する色情報を有するエリアを異物xとして判定する。馬鈴薯生地P中の異物xは、馬鈴薯の皮が主たる成分であるので、異物判定手段は、白色又は黄色を有する馬鈴薯生地Pに対し茶色等に変色した領域を異物として判定する。
【0026】
また、異物判定手段は、上記茶色等の領域が所定の面積以下の大きさである場合には、当該領域を異物として判定しなくてもよい。このように、面積の非常に小さい上記茶色等の領域については、異物判定手段が異物として判定しないことで、吸引管6が本来吸引する必要のない馬鈴薯生地Pの吸引の抑制が可能になる。上記面積については、例えば、馬鈴薯生地Pの種類、馬鈴薯生地Pの搬送速度、又は吸引管6の吸引口の内径等に応じて適宜調節されてよい。
【0027】
異物位置情報生成手段は、異物判定手段が馬鈴薯生地P中の異物xの存在を判定することにより、異物xの存在エリアに関する異物位置情報を生成する。存在エリアとは、馬鈴薯生地P中の異物xの存在する領域を指す。すなわち、異物位置情報とは、馬鈴薯生地P中のどの位置に異物xが存在しているのかを表す情報である。上記異物位置情報により、コンピュータcは、後述する吸引管制御装置5に吸引管6の異物xの吸引位置を調節させることが可能になる。
【0028】
距離情報算出手段は、馬鈴薯生地Pが食品撮影位置Aから搬送された距離に関する距離情報を算出する。より具体的には、距離情報算出手段は、例えば、搬送装置2の駆動部に付属するエンコーダ21のパルス情報に基づいて、馬鈴薯生地Pが食品撮影位置Aから搬送された距離に関する距離情報を算出する。そのため、異物除去システム1では、上記距離情報及び上記異物位置情報に基づいて異物xが除去される位置を正確に認識することが可能になる。これにより、コンピュータcでは、吸引管6による異物xを吸引する位置を正確に制御することが可能になる。
【0029】
一例として、図1に示すように、まず、食品撮影位置Aにおいて撮影装置4により撮影された馬鈴薯生地Pが、αパルス分(例えば、0.5mm/1パルス)進むことで異物除去位置Bのエリアに入る。そして、コンピュータcから吸引管制御装置5に、異物xを除去するための距離情報及び異物位置情報を含む除去信号が送られ、吸引管6は正確な位置で異物xを除去することが可能となる。
【0030】
また、コンピュータcには、更に異物除去時刻算出手段が含まれていてもよい。異物除去時刻算出手段は、食品撮影位置Aと異物除去位置Bとの間の距離及び搬送装置2の搬送速度に基づいて異物xが除去される除去時刻を算出する。例えば、時刻;x時y分z秒に馬鈴薯生地Pが撮影され、食品撮影位置Aと異物除去位置Bとの間隔が2αメートルであり、搬送装置2の搬送速度が秒速αメートルである場合、上記時刻の2秒後である、時刻;x時y分(z+2)秒が、除去時刻となる。これにより、コンピュータcでは、吸引管6による異物xを吸引するタイミングを正確に制御することが可能になる。
【0031】
次に、異物除去手段Mの主たる構成である吸引管制御装置5、吸引管6、圧力センサ7、吹き付け装置10の機能構成について説明する。
【0032】
吸引管制御装置5は、上記異物位置情報に基づいて、吸引管6の先端部分61を移動させる。吸引管制御装置5の形状等は、吸引管6の位置制御が可能であれば、特に限定されないが、例えば、図1に示すように、複数個の脚部51を有し、脚部51が吸引管6の先端部分61を挟持する。このように、吸引管制御装置5が吸引管6を支持することで、異物除去システム1では、吸引管6が異物xを正確な位置で吸引することが可能になる。また、吸引管制御装置5が吸引管6を支持することで、後述する吹き付け装置10により吸引管6が気体を吹き付けられている場合にも、上記気体によって吸引管6が動いてしまうことが防止される。
【0033】
吸引管6は、上記距離情報及び上記異物位置情報に基づいて、異物除去位置Bまで搬送された異物xを先端部分61から吸引する。吸引管6の形状等については、適切な位置で異物xを吸引することが可能であれば、特に限定されないが、例えば、図1に示すように、先端部分61と、先端部分61に連続して形成された屈曲部62と、屈曲部62の下方に形成された配管63と、吸引管6の途中箇所から分岐した分岐管64とが設けられる。この場合、先端部分61は、異物xが凝着してしまうことを防止するために、フッ素樹脂を有していてもよい。また、屈曲部62において異物xが滞留してしまうことを防止するために、吸引管6は、テフロン(登録商標)性の材質を有していてよい。
【0034】
また、吸引管6の内径については、馬鈴薯生地Pのサイズ等に応じて、馬鈴薯生地Pの径より小さくするように調整してよい。例えば、馬鈴薯生地Pが7mm程度の格子で裏ごしされてから、搬送装置2により搬送される場合、吸引管6が馬鈴薯生地Pを吸引しないように、吸引管6を4〜5mm程度の内径に設計することが可能である。
【0035】
そして、吸引管6による吸引は、吸引機9が起動することにより行われ、吸引された異物xが異物捕集部8に補集される。吸引機9の吸引力等については、特に限定されるものではなく、馬鈴薯生地Pの粘性の程度や、馬鈴薯生地Pの搬送速度等に応じて調整可能なものであってよい。また、異物捕集部8のサイズ等についても、特に限定されるものではなく、搬送される馬鈴薯生地P中の異物xの量等に応じて適宜設定されてよい。
【0036】
圧力センサ7は、形状等については、特に限定されないが、例えば、図5に示すように、吸引管6の分岐管64に設けられ、吸引管6が異物xを吸引する際の圧力を検知する。より具体的には、圧力センサ7は、例えば、吸引管6が異物xを吸引していない状態の吸引管6の内部の圧力と、異物xを吸引している最中の吸引管6の内部の圧力との圧力差を監視する。そして、圧力(圧力差)が所定の閾値以下である回数が予め設定された回数に達した場合に、後述する吹き付け装置10が、吸引管6に気体を吹き付ける。上記所定の閾値は、容易に任意設定できるものとする。
【0037】
この点、関連技術に係る異物除去システムでは、吸引管の吸引回数が所定の回数を超えた場合に、吹き付け装置が自動的に吸引管に気体を吹き付けるというシステムのものがある。すなわち、上記関連技術に係る異物除去システムでは、吸引管に詰まりが生じていない場合においても、吸引管の吸引回数が上記所定の回数を超えると、吹き付け装置が気体を吹き付ける。このような異物除去システムでは、吸引管の吸引回数が上記所定の回数に達する前に既に吸引管に詰まりが生じる場合がある。そのため、この場合、吹き付け装置は吸引管に気体を吹き付けず、吸引管による異物xの吸引が困難になる。
【0038】
また、上記関連技術に係る異物除去システムでは、吸引管にほとんど詰まりが生じていない状態で、吸引管の吸引回数が上記所定の回数に達する場合がある。このような場合に、吹き付け装置が気体を吹き付けた際には、吸引管内部に蓄積された馬鈴薯生地Pや馬鈴薯生地Pの皮等が吸引管の内壁にへばりついてしまうことがある。そのため、一旦上記内壁にへばりついた馬鈴薯生地Pや馬鈴薯生地Pの皮等の接着力は非常に強く、以後、吹き付け装置が吸引管に気体を吹き付けても、却って異物x等を取り除くことが困難になることがある。
【0039】
これに対し、本実施形態に係る圧力センサ7では、吸引管6内部の圧力が所定の閾値以下である回数が予め設定された回数に達する毎に、すなわち、吸引管6に詰まりが生じた場合に、吹き付け装置10が吸引管6に気体を吹き付ける。そのため、異物除去システム1では、吸引管6による異物xの吸引を繰り返しても、吸引管6内部に異物x等を蓄積してしまうことを防止でき、吸引管6の詰まりを精度良く且つ速やかに解消することができる。
【0040】
また、吸引管6が異物xの吸引を繰り返すことで、異物x等が内部に蓄積していない状態で吸引管6が異物xを吸引する際の圧力の低下等による圧力変動が生じる場合がある。この点、異物除去システム1では、吸引開始寸前に上記圧力変動に応じて上記所定の閾値を設定することが可能である。そのため、例えば、吸引管6の内部に異物x等の詰まりが生じていないにも関わらず、吹き付け装置10が吸引管6の内部に向けて気体を吹き付けてしまうことを防止することができる。
【0041】
更に、上記予め設定された回数については、特に限定されるものではないが、2回以上に設定されることが好適である。異物除去システム1では、例えば、吸引管6の内部に異物x等が蓄積はしていないものの、吸引管6の不具合等により、吸引管6が異物xを吸引する際の圧力がたまたま所定の閾値以下になる可能性がある。このような場合においても、上記予め設定された回数が2回以上に設定されることで、吹き付け装置10が誤って吸引管6の内部に向けて気体を吹き付けることを防止することができる。
【0042】
吹き付け装置10は、圧力センサ7の圧力値が所定の閾値以下である回数が予め設定された回数に達する毎に、吸引管6の内部に向けて気体を吹き付ける。そのため、異物除去システム1では、適当なタイミングで吸引管6の内部の清掃が実行され、吸引管6の詰まりを精度良く且つ速やかに解消することができる。
【0043】
この点、関連技術に係る異物除去システムでは、吹き付け装置10で吸引管6の内部に気体を吹き付ける代わりに、吸引管の内部を水で清掃するものがある。このような関連技術に係る異物除去システムでは、水で流し切れなかった馬鈴薯生地Pや馬鈴薯生地Pの皮等が吸引管6の内壁にへばりつくことがある。そのため、一旦上記内壁にへばりついた馬鈴薯生地Pや馬鈴薯生地Pの皮等の接着力は非常に強く、上記関連技術に係る異物除去システムでは、以後、吸引管に水を流しても、馬鈴薯生地Pや馬鈴薯生地Pの皮等を取り除くことが却って困難になることがある。
【0044】
これに対し、本実施形態に係る異物除去システム1では、吹き付け装置10が吸引管6の内部に向けて気体を吹き付けて、吸引管6の内部の清掃をするため、吸引管6が異物の吸引を繰り返しても、吸引管6の詰まりを容易に解消することができる。
【0045】
図1に示すように、吹き付け装置10の管104には、2つの電磁弁102、103が形成されている。電磁弁102、103により、吹き付け装置10では、吸引管6の内部に対する気体の吹き付け位置の調節をする。より具体的には、本実施形態に係る吹き付け装置10は、吸引管6の先端部分61又は分岐管64に向けて気体を吹き付けることが可能である。なお、上記吹き付け位置の調節は、例えば、コンピュータcで行われる。
【0046】
ここで、まず、吹き付け装置10が吸引管6の先端部分61に気体を吹き付け、内部の清掃を実行する場合について説明する。吹き付け装置10には、気体の吹き出し口が漏斗状に広がる漏斗状部101が形成されている。圧力センサ7の圧力値が所定の閾値以下である回数が予め設定された回数に達する毎に、吸引管制御装置5が、吸引管6の先端部分61を漏斗状部101に対向する位置に移動させる。そして、吹き付け装置10は、漏斗状部101から吸引管6の先端部分61に気体を吹き付ける。漏斗状部101は、気体の吹き出し口が漏斗状に広がっているため、吹き付け装置10では、吸引管6の内部に確実に気体を吹き付けることが可能になる。なお、上記気体としては、特に限定されないが、例えば、空気、酸素、窒素等が挙げられる。
【0047】
また、吹き付け装置10の漏斗状部101は、図6に示すように、吹き出し口側に向けて弾性部材11により付勢されていてもよい。弾性部材11は、バネ111と、板112とを主に有する。上記漏斗状部101は、弾性部材11の弾性力を受けた板112により、吹き出し口側に向けて付勢される。これにより、吹き付け装置10が吸引管6の内部に気体を吹き付ける際に、吹き付け装置10の漏斗状部101と吸引管6の先端部分61とを安定に固定しながら、吹き付け装置10は、吸引管6の内部に気体を吹き付けることが可能になる。
【0048】
また、一方で、吹き付け装置10が漏斗状部101から吸引管6の先端部分61を介して内部に気体を吹き付ける代わりに、吹き付け装置10では、図1に示すように、分岐管64に気体を吹き付けることも可能である。このようにして、異物除去システム1では、内部に比較的馬鈴薯生地Pや異物xが詰まりやすい圧力センサ7と配管63との分岐管64に気体を吹き付けて、吸引管の詰まりを精度良く且つ速やかに解消することが可能になる。
【0049】
<2−1.本発明の実施形態に係る異物処理方法について>
次に、図7A〜図10を参照しながら、異物除去システム1が馬鈴薯生地P中の異物xを除去する流れについて説明する。図7A及び図7Bは、本発明の実施形態に係る異物処理方法を示すフロー図である。また、図8は、本実施形態に係る異物除去システム1において、吸引管6が異物xを吸引している状態を説明するための図である。また、図9は、本実施形態に係る異物除去システム1において、吹き付け装置10が吸引管6の先端部分61を介して内部に気体を吹き付けている状態を説明するための図である。また、図10は、本実施形態の変形例に係る異物除去システムを説明するための図である。
【0050】
まず、図7Aに示すように、ステップS1では、裏ごしされた馬鈴薯生地Pが搬送装置2によって上流側から下流側に向けて搬送される。馬鈴薯生地Pが搬送装置2によって搬送されることで、後述するように、異物除去システム1では、馬鈴薯生地P中の異物xを検出し、異物xを除去することが可能になる。
【0051】
次に、ステップS2では、まず、照明3が馬鈴薯生地Pを照らしつつ、撮影装置4が食品撮影位置Aで馬鈴薯生地Pを撮影する。撮影装置4は、馬鈴薯生地Pが搬送装置2により搬送されている間、常時作動していてよく、食品撮影位置Aを通過する馬鈴薯生地Pを常時撮影する。そして、撮影装置4による馬鈴薯生地Pの撮影により、画像情報生成手段は、馬鈴薯生地Pの画像情報を生成する。
【0052】
次に、ステップS3では、まず、異物判定手段が、上記画像情報においてコンピュータに予め設定された色情報に対応する色情報を有するエリアを異物として判定する。具体的には、馬鈴薯生地Pが有する白色又は黄色の色情報のみが画像情報に含まれているのか、皮等の異物xが有する茶色等の色情報が画像情報に含まれているのか否かを判定する。異物判定手段は、白色又は黄色の色情報のみが画像情報に含まれている場合には、異物xは存在しないものと判定し、茶色等の色情報が画像情報に含まれている場合には、異物xが存在するものと判定する。
【0053】
この際、異物判定手段は、上記茶色等の領域が所定の面積以下の大きさである場合には、当該領域を異物として判定しなくてもよい。異物判定手段が面積の非常に小さい上記茶色の領域を異物として判定しないことで、吸引管6が本来吸引する必要のない馬鈴薯生地Pの吸引が防止可能である。
【0054】
次に、馬鈴薯生地P中に異物xが存在しないと判定された場合、ステップS4では、搬送装置2が馬鈴薯生地Pを搬送する。そして、馬鈴薯生地Pは、次の工程(例えば、馬鈴薯生地Pの味付け工程等)に良品P’として移送される。
【0055】
一方、馬鈴薯生地P中に異物xが存在すると判定された場合、ステップS5では、異物xを除去することが決定される。具体的には、まず、異物位置情報生成手段が異物xの存在エリアに関する異物位置情報を生成する。この異物位置情報により、馬鈴薯生地P中のどの位置に異物xが存在するのかが特定される。そして、距離情報算出手段が、搬送装置2の搬送距離に基づいて、馬鈴薯生地Pが食品撮影位置Aから搬送された距離に関する距離情報を算出する。
【0056】
次に、ステップS6では、吸引管制御装置5が、上記距離情報及び上記異物位置情報に基づいて、吸引管6の先端部分61を移動させる。より具体的には、図8に図示するように、吸引管制御装置5は、異物除去位置Bに搬送された馬鈴薯生地P中の異物xが存在するエリアに吸引管6の先端部分61の位置を調整する。
【0057】
次に、図7Aに示すように、ステップS7では、吸引管6が上記異物除去位置まで搬送された異物xを吸引することで、馬鈴薯生地P中の異物xを除去する。そして、ステップS8では、吸引された異物xは、配管63内に移送され、ステップS9では、異物xが、異物捕集部8に捕集される。
【0058】
また、異物除去システム1では、ステップS1〜S9で実行される処理と並行して、図7Bに示す処理が実行される。ここで、当該処理について、図7Bを参照しながら説明する。
【0059】
まず、図7Bに示すように、ステップS10では、圧力センサ7が、吸引管6の内部の圧力差を監視することで圧力を検知する。搬送装置2が馬鈴薯生地Pを搬送している間、圧力センサ7は常時起動していてもよい
【0060】
次に、ステップS11では、圧力センサ7において、吸引管6の内部の圧力が所定の閾値以下である回数が予め設定された回数に達したか否かを判定する。これにより、上記圧力に異常があるか否かを判定する。吸引管6の内部の圧力が所定の閾値以下である回数が予め設定された回数に達していない場合には、再びステップS10において、圧力センサ7が、吸引管6の内部の圧力差を監視することで圧力を検知する。
【0061】
一方、ステップS12では、吸引管6の内部の圧力が所定の閾値が所定の閾値以下である回数が予め設定された回数に達した場合には、吹き付け装置10が吸引管6の内部に向けて気体を吹き付け、内部の清掃を実行する。吹き付け装置10は、吸引管6の先端部分61又は分岐管64に向けて気体を吹き付ける。
【0062】
ここで、図9を参照しながら、吹き付け装置10が吸引管6の内部に向けて気体を吹き付ける状態について説明する。図9に示すように、吸引管制御装置5が、吸引管6の先端部分61を漏斗状部101に対向する位置に移動させる。そして、吹き付け装置10が、先端部分61を介して吸引管6の内部に向けて気体を吹き付ける。
【0063】
一方で、吹き付け装置10が分岐管64に気体を吹き込む場合には、電磁弁102、103により気体の吹き付け位置が変更される。電磁弁102、103の制御については、コンピュータcが行うことができる。
【0064】
以上説明したように、本実施形態に係る異物除去システム1では、圧力センサ7が吸引管6の内部の圧力差を監視し圧力を検知することで、圧力が所定の閾値以下である回数が予め設定された回数に達する毎に、吹き付け装置10が吸引管6の内部に向けて気体を吹き付ける。そのため、異物除去システム1では、吸引管6の詰まりを精度良く且つ速やかに解消することができる。また、吹き付け装置10は、気体を漏斗状部101から先端部分61を介して吸引管6の内部に吹き付け、更に、分岐管64に気体を吹き付けることも可能である。そのため、吹き付け装置10は、吸引管6内部の詰まりの状況(例えば、先端部分61側が詰まっているか、分岐管64付近が詰まっているかについて)に応じて、吹き付け位置を変更することができ、吸引管6の詰まりをより正確に解消することができる。
【0065】
また、吹き付け装置10は、吸引管6の先端部分61を介して気体を吹き付ける際の吹き出し口に漏斗状部101を有することが可能である。そのため、吸引管6内部に吹き付ける気体の漏れを防止することで、吸引管6の詰まりをより正確且つ速やかに解消することができる。
【0066】
また、吹き付け装置10の漏斗状部101は、吹き出し口側に向けて弾性部材11によって付勢されていてもよい。この場合、吹き付け装置10が吸引管6の内部に気体を吹き付ける際にも、吹き付け装置10が動いてしまうことを防止し、吹き付け装置10の漏斗状部101と吸引管6の先端部分61とを安定に固定することができ、吸引管6の詰まりをより正確に解消することができる。
【0067】
<2−2.本実施形態に係る変形例について>
次に、本実施形態の変形例に係る異物除去システムの異物除去方法について、図7B及び図10を参照しながら説明する。なお、本変形例において、本実施形態と実質的に同一の構成、除去内容については、同一の符号を付することにより重複説明を省略する。
【0068】
図1を主に参照しながら説明した本実施形態の機能構成と比し、本変形例の機能構成では、搬送装置のみが異なる。また、本変形例に係る異物除去方法は、図7A及び図7Bを主に参照しながら説明した本実施形態の異物除去方法と比し、ステップS13における処理のみが異なるので、ここでは、ステップS13における処理内容についてのみ説明する。
【0069】
本変形例に係る搬送装置は、食品を搬送する第1搬送装置と、吹き付け装置10が吸引管6の内部に向けて気体を吹き付けている間に異物除去されずに搬送された馬鈴薯生地Pを下流から上流に向けて搬送し、馬鈴薯生地Pを第1搬送装置に搬送させる第2搬送装置から構成される。
【0070】
この構成によれば、ステップS3において、馬鈴薯生地P中に異物xが存在するものと判定され、且つステップS13において、吸引管6が吹き付け装置10により内部の清掃が実行されている場合であっても、馬鈴薯生地Pの異物xの除去をより確実に実行することが可能になる。すなわち、第2搬送装置は、このような馬鈴薯生地Pを、例えば、上記良品P’が移送されていく経路とは別に、下流から上流に向けて搬送し、再度第1搬送装置に搬送させる。そのため、本変形例に係る異物除去システムでは、異物除去をより精度よく実行することができる。
【産業上の利用可能性】
【0071】
本発明は、食品中の異物除去システムとして利用することができる。これにより、馬鈴薯の加工食品等において、馬鈴薯の皮等が製品に混在してしまうことを防止することができる。そのため、品質が優れた製品を提供することができる。
【符号の説明】
【0072】
1:異物除去システム、2:搬送装置、4:撮影装置、5:吸引管制御装置、6:吸引管、61:先端部分、7:圧力センサ、10:吹き付け装置、101:漏斗状部、c:コンピュータ、M:異物除去手段、P:馬鈴薯生地、x:異物
【特許請求の範囲】
【請求項1】
コンピュータを利用し、食品の異物除去を行う異物除去システムであって、
食品を搬送する搬送装置と、
前記食品をコンピュータに予め設定された食品撮影位置で自動撮影する撮影装置と、
当該撮影装置に対し下流側に設けられ、予め設定された異物除去位置で前記食品中の異物を除去する異物除去手段と、
前記撮影装置の撮影により食品の画像情報を生成する画像情報生成手段と、
前記画像情報においてコンピュータに予め設定された色情報に対応する色情報を有するエリアを異物として判定する異物判定手段と、
前記異物判定手段の判定により前記異物の存在エリアに関する異物位置情報を生成する異物位置情報生成手段と、
前記搬送装置の搬送距離に基づいて、前記食品が前記食品撮影位置から搬送された距離に関する距離情報を算出する距離情報算出手段と、
を備え、
前記異物除去手段は、
前記距離情報及び前記異物位置情報に基づいて、前記異物除去位置まで搬送された前記異物を先端部分から吸引する吸引管と、
前記吸引管が前記異物を吸引する際の圧力を検知する圧力センサと、
前記圧力が所定の閾値以下である回数が予め設定された回数に達する毎に、前記吸引管の内部に向けて気体を吹き付ける吹き付け装置と、
を有する異物除去システム。
【請求項2】
前記予め設定された回数は、2回以上である、請求項1記載の異物除去システム。
【請求項3】
前記距離情報及び前記異物位置情報に基づいて、前記吸引管の先端部分を移動させる吸引管制御装置を更に備える、請求項2記載の異物除去システム。
【請求項4】
前記吹き付け装置には、前記気体の吹き出し口が漏斗状に広がる漏斗状部が形成されており、
前記圧力が所定の閾値以下である回数が予め設定された回数に達する毎に、前記吸引管制御装置は、前記吸引管の先端部分を前記漏斗状部に対向する位置に移動させ、
前記吹き付け装置は、前記漏斗状部から前記吸引管の内部に気体を吹き付ける、請求項3記載の異物除去システム。
【請求項5】
前記漏斗状部は、前記吹き出し口側に向けて弾性部材によって付勢されている、請求項4記載の異物除去システム。
【請求項6】
前記圧力センサは、前記吸引管の途中箇所から分岐した分岐管に設けられている、請求項2記載の異物除去システム。
【請求項7】
前記圧力が所定の閾値以下である回数が予め設定された回数に達する毎に、
前記吹き付け装置は、前記分岐管に気体を吹き付ける、請求項6記載の異物除去システム。
【請求項8】
前記食品は、裏ごしされた馬鈴薯である、請求項1記載の異物除去システム。
【請求項9】
前記搬送装置は、ベルトコンベア又はプラスチックコンベアである、請求項1記載の異物除去システム。
【請求項10】
前記搬送装置は、
食品を搬送する第1搬送装置と、
前記吹き付け装置が前記吸引管の内部に向けて気体を吹き付けている間に、異物除去されずに搬送された前記食品を下流から上流に向けて搬送し、前記食品を第1搬送装置に搬送させる第2搬送装置と、
を備える、請求項1記載の異物除去システム。
【請求項1】
コンピュータを利用し、食品の異物除去を行う異物除去システムであって、
食品を搬送する搬送装置と、
前記食品をコンピュータに予め設定された食品撮影位置で自動撮影する撮影装置と、
当該撮影装置に対し下流側に設けられ、予め設定された異物除去位置で前記食品中の異物を除去する異物除去手段と、
前記撮影装置の撮影により食品の画像情報を生成する画像情報生成手段と、
前記画像情報においてコンピュータに予め設定された色情報に対応する色情報を有するエリアを異物として判定する異物判定手段と、
前記異物判定手段の判定により前記異物の存在エリアに関する異物位置情報を生成する異物位置情報生成手段と、
前記搬送装置の搬送距離に基づいて、前記食品が前記食品撮影位置から搬送された距離に関する距離情報を算出する距離情報算出手段と、
を備え、
前記異物除去手段は、
前記距離情報及び前記異物位置情報に基づいて、前記異物除去位置まで搬送された前記異物を先端部分から吸引する吸引管と、
前記吸引管が前記異物を吸引する際の圧力を検知する圧力センサと、
前記圧力が所定の閾値以下である回数が予め設定された回数に達する毎に、前記吸引管の内部に向けて気体を吹き付ける吹き付け装置と、
を有する異物除去システム。
【請求項2】
前記予め設定された回数は、2回以上である、請求項1記載の異物除去システム。
【請求項3】
前記距離情報及び前記異物位置情報に基づいて、前記吸引管の先端部分を移動させる吸引管制御装置を更に備える、請求項2記載の異物除去システム。
【請求項4】
前記吹き付け装置には、前記気体の吹き出し口が漏斗状に広がる漏斗状部が形成されており、
前記圧力が所定の閾値以下である回数が予め設定された回数に達する毎に、前記吸引管制御装置は、前記吸引管の先端部分を前記漏斗状部に対向する位置に移動させ、
前記吹き付け装置は、前記漏斗状部から前記吸引管の内部に気体を吹き付ける、請求項3記載の異物除去システム。
【請求項5】
前記漏斗状部は、前記吹き出し口側に向けて弾性部材によって付勢されている、請求項4記載の異物除去システム。
【請求項6】
前記圧力センサは、前記吸引管の途中箇所から分岐した分岐管に設けられている、請求項2記載の異物除去システム。
【請求項7】
前記圧力が所定の閾値以下である回数が予め設定された回数に達する毎に、
前記吹き付け装置は、前記分岐管に気体を吹き付ける、請求項6記載の異物除去システム。
【請求項8】
前記食品は、裏ごしされた馬鈴薯である、請求項1記載の異物除去システム。
【請求項9】
前記搬送装置は、ベルトコンベア又はプラスチックコンベアである、請求項1記載の異物除去システム。
【請求項10】
前記搬送装置は、
食品を搬送する第1搬送装置と、
前記吹き付け装置が前記吸引管の内部に向けて気体を吹き付けている間に、異物除去されずに搬送された前記食品を下流から上流に向けて搬送し、前記食品を第1搬送装置に搬送させる第2搬送装置と、
を備える、請求項1記載の異物除去システム。
【図1】


【図2】

【図3】
【図4】
【図5】
【図6】
【図7A】
【図7B】
【図8】
【図9】
【図10】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7A】
【図7B】
【図8】
【図9】
【図10】
【公開番号】特開2012−122739(P2012−122739A)
【公開日】平成24年6月28日(2012.6.28)
【国際特許分類】
【出願番号】特願2010−271191(P2010−271191)
【出願日】平成22年12月6日(2010.12.6)
【出願人】(592256025)カルビーポテト株式会社 (3)
【Fターム(参考)】
【公開日】平成24年6月28日(2012.6.28)
【国際特許分類】
【出願日】平成22年12月6日(2010.12.6)
【出願人】(592256025)カルビーポテト株式会社 (3)
【Fターム(参考)】
[ Back to top ]