
異物除去装置、電子線殺菌システム
【課題】殺菌を確実に行いながらも、使用水量を削減し、コストを低減することのできる異物除去装置、電子線殺菌システムを提供する。
【解決手段】ノズル31から気体を噴出しながら、容器100の口部100aから底部100b近傍までの区間を往復動させてスキャンすることにより、容器100内の、特に容器100の内周面に付着している異物を吹き飛ばし、容器100の口部100aから外部に排出する。異物の除去を確実に行うために、ノズル31から噴出する気体は、たとえば0.2MPa以上の圧縮空気とするのが好ましい。電子線照射による殺菌工程と、気体吹き付けによる異物除去工程により容器殺菌処理を行うことで、水を用いない完全にドライなシステムを実現する。
【解決手段】ノズル31から気体を噴出しながら、容器100の口部100aから底部100b近傍までの区間を往復動させてスキャンすることにより、容器100内の、特に容器100の内周面に付着している異物を吹き飛ばし、容器100の口部100aから外部に排出する。異物の除去を確実に行うために、ノズル31から噴出する気体は、たとえば0.2MPa以上の圧縮空気とするのが好ましい。電子線照射による殺菌工程と、気体吹き付けによる異物除去工程により容器殺菌処理を行うことで、水を用いない完全にドライなシステムを実現する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、飲料などの液体を充填する容器の異物除去装置、電子線殺菌システムに関する。
【背景技術】
【0002】
飲料水等の液体をPETボトルやガラス瓶、ボトル缶等の容器に充填する装置として、回転式の充填装置が用いられている。この回転式の充填装置は、回転する円形のホイールの外周部に複数の充填バルブを備えており、ホイールがほぼ1回転して容器が周方向に搬送される間に、充填バルブから容器内への充填を行う。そして、容器への充填が終了した後、キャッパ(打栓機)により容器へのキャップの装着が行われる。
【0003】
ところで、飲料水等の場合、雑菌等の容器への混入を防ぐことが必須であり、このため、お茶やミネラルウォータ等を充填する場合、クリーンルーム内で、容器殺菌、キャップ殺菌、製品液の充填及びキャップ装着といった一連の工程を行ういわゆる無菌充填方式が採用されている。この場合、容器殺菌方法として、過酢酸、過酸化水素を含む水溶液からなる過酢酸系の殺菌液を用いた殺菌方法を使用し、その後、無菌水を容器内に噴射することにより容器をすすぐことが知られている(例えば、特許文献1参照。)。
【0004】
また、炭酸飲料を充填する場合も、殺菌液として次亜塩素酸ナトリウム溶液を用いて容器の洗浄を行い、その後、水により容器をすすぐことが行われている。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開平8−58744号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかしながら、上記したように、従来の殺菌方法においては、殺菌液による殺菌を行った後、容器内周面に残存する殺菌液を除去するために、無菌水や水によるすすぎを行うことが必須となっている。このため、水を大量に使用する必要があり、使用水量の削減が望まれている。
特に、無菌水を用いる無菌充填方式においては、無菌水は、熱交換器により140℃程度まで加熱して殺菌を行っているため、熱交換器等をはじめとする初期設備投資も大きく、また加熱に用いるエネルギのためのランニングコストもかかるという問題がある。
【0007】
ところで、近年、紫外線よりも殺菌力に勝る電子線照射による殺菌技術が注目され、鋭意開発が行われている。このような電子線殺菌方式においては、当然、殺菌液が容器内周面に残存することもないため、殺菌液除去のためのすすぎ工程は不要である。
しかしながら、製造工程において容器内に混入する可能性のある異物を除去するために、殺菌液による殺菌方式と同様、水を用いて容器をすすぐ必要がある。したがって、電子線殺菌方式を採用する場合においても、使用水量を削減することが望まれているのは共通している。
【0008】
本発明は、このような技術的課題に基づいてなされたもので、殺菌を確実に行いながらも、使用水量を削減し、コストを低減することのできる異物除去装置、電子線殺菌システムを提供することを目的とする。
【課題を解決するための手段】
【0009】
かかる目的のもとになされた本発明の異物除去装置は、気体を外周側に向けて噴出するノズル孔を有したノズルと、倒立状態に保持された容器に対し、ノズルを容器内に相対的に進入させるノズル駆動機構と、を備える。そして、ノズルを容器内に進入させ、ノズル孔から気体を噴出させながら容器の高さ方向に沿って移動させることで、容器内の異物を除去することを特徴とする。
気体を噴出させながら容器内を移動させる(この動作を「スキャン」と称する)ことで、容器内の異物を確実に除去できる。
【0010】
ここで、ノズルは、ノズル孔から気体を噴出させながら、容器の口部から底部に向けて移動させた後、底部から口部に向けて移動させる、つまりノズル内で往復動させるのが、異物の確実な除去のためには好ましい。
また、ノズルは、ノズル孔から気体を噴出させながら、容器の口部から底部、または底部から口部に向けて移動させてもよい。つまり、ノズルを往復動させる間、往路または復路のいずれか一方で、気体を噴出しながらスキャンを行うのである。この場合、気体を噴出しながら往復動する場合に比較し、気体の圧力を高めるのが好ましい。
【0011】
また、ノズルから噴出する気体を加湿する加湿手段をさらに備えても良い。
また、容器に発生しているイオンの対イオンを発生させ、ノズルから噴出する気体に添加するイオン発生器をさらに備えるようにしても良い。
【0012】
本発明は、容器に電子線を照射することで容器を殺菌する電子線殺菌装置と、電子線殺菌装置で殺菌された容器内に気体を吹き付けることで容器内の異物を除去する異物除去装置と、を備える電子線殺菌システムとすることもできる。この場合、このシステムは、異物除去装置が、気体を外周側に向けて噴出するノズル孔を有したノズルと、倒立状態に保持された容器に対し、ノズルを容器内に相対的に進入させるノズル駆動機構と、を備えることを特徴とする。
また、ノズルを容器内に進入させ、ノズル孔から気体を噴出させながら容器の高さ方向に沿って移動させることで、容器内の異物を除去するのが好ましい。
【発明の効果】
【0013】
本発明によれば、ノズルから気体を噴出しながら、容器内をスキャンさせることにより、容器内から異物を除去することができる。このようにして、水を用いずに異物の除去が行えるので、当然ながら、水の使用量が大幅に削減でき、ランニングコストも低減できる。
【0014】
また、本発明の電子線殺菌システムにおいては、殺菌工程と異物除去工程とからなる容器殺菌処理を、水を用いずに行える。すなわち、水を用いない完全にドライな電子線殺菌システムを実現することが可能となる。
【図面の簡単な説明】
【0015】
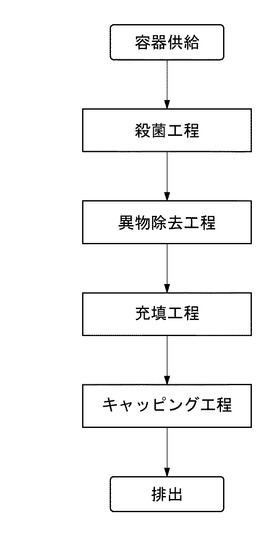
【図1】本実施の形態における容器殺菌方法を用いた飲料充填工程の流れを示す図である。
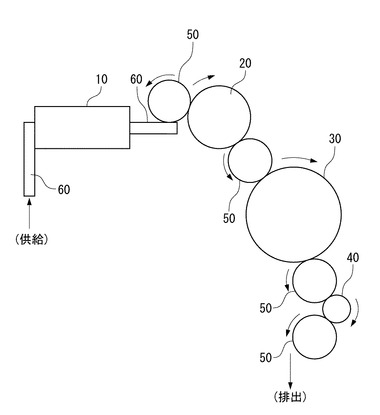
【図2】飲料充填工程を実施する飲料充填設備の概要を示す図である。
【図3】異物除去装置における異物除去処理の流れを示すため、異物除去装置を周方向に展開した図である。
【図4】異物除去装置において、容器を保持するグリッパおよびノズルを示す側断面図である。
【図5】ノズル形状の一例を示す断面図である。
【図6】加湿装置の一例を示す図である。
【図7】イオン発生器を備えた例における、容器を保持するグリッパおよびノズルを示す側断面図である。
【発明を実施するための形態】
【0016】
以下、添付図面に示す実施の形態に基づいてこの発明を詳細に説明する。
〔第一の実施形態〕
図1は、本実施の形態における飲料充填工程の流れを示す図であり、図2は、飲料充填工程を実施する飲料充填設備の概要を示す図である。
図1、図2に示すように、飲料充填設備においては、供給された容器に対し、殺菌装置(電子線殺菌装置)10において電子線照射により殺菌する殺菌工程、異物除去装置20において容器の異物を除去する異物除去工程、充填装置30において容器に液体を充填する充填工程、液体が充填された容器にキャッパ40においてキャップを装着するキャッピング工程、を順次経ることで、容器への飲料の充填が行われる。なお、互いに前後する装置間においては、スターホイール50や搬送コンベア60により容器が搬送される。
【0017】
殺菌工程において用いられる殺菌装置10は、ボトルを搬送しながらボトルに電子線を照射して殺菌を行う。ここで、殺菌装置10自体については、本発明において何らの限定をする意図はなく、いかなる構成のものを用いても良い。また、殺菌装置10においては、キャッパ40で装着するキャップに対し、容器と並行して電子線照射による殺菌を行うこともできる。
【0018】
異物除去装置20は、殺菌装置10とともに電子線殺菌システムを構成するもので、直前工程の殺菌装置10と、直後工程の充填装置30との間に配置されている。
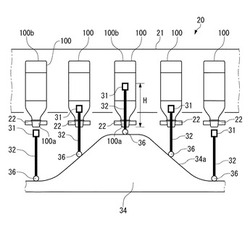
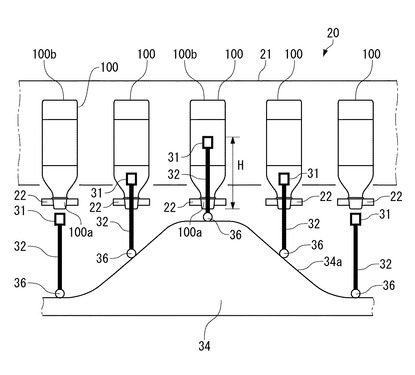
図3は、異物除去装置20の概略構成を示すための図であり、平面視円形の異物除去装置20を展開して側面視したものである。
異物除去装置20には、円盤状のホイール21が設けられている。このホイール21は、モーターなどの駆動源(図示せず)によって、ほぼ水平面内で回転駆動される。ホイール21の外周部には、容器100を倒立状態で保持するグリッパ22がホイール21の周方向に一定間隔ごとに配置されている。なお、図3においては、グリッパ22を5組のみ図示しているが、これはあくまでも動作説明のためであり、実際には多数のグリッパ22がホイール21の外周部に設けられる。
【0019】
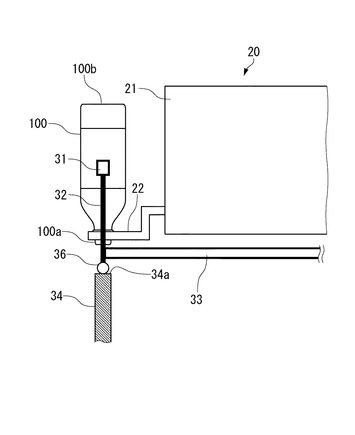
各グリッパ22に対向した位置には、倒立状態の容器100内にエアを噴出するためのノズル31が設けられている。このノズル31は、シャフト32の上端部に設けられている。図4に示すように、シャフト32は、ホイール21の外周側に向けて延出するアーム33の先端部に、上下方向に昇降可能に支持されている。シャフト32の下方には、ノズル駆動機構として、ホイール21と同心状に設けられた、環状のカム34が設けられている。カム34は、その上端面34aの高さが、ホイール21の周方向の一部において高く形成されている。シャフト32の下端部には、カム34の上端面34aに沿って摺動するカムフォロワ36が設けられている。
ホイール21が回転すると、カムフォロワ36がカム34の上端面34aに倣って上下方向に変位し、これによってシャフト32が昇降する。シャフト32の上端部に設けられたノズル31は、当初は、グリッパ22に保持されて倒立状態にある容器100に対し、容器100の口部100aよりも下方に位置している。ホイール21の回転によりカム34に沿ってシャフト32が上昇すると、ノズル31が容器100内に挿入され、シャフト32が下降すると、ノズル31は容器100内から外に出る。
このとき、ノズル31の容器100内への挿入高さの最大値H(すなわち、カム34の最大リフト量)は、容器100のサイズ等に応じて適宜設定される。
【0020】
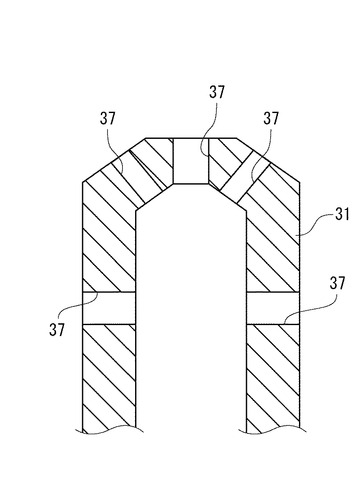
図5に示すように、ノズル31には、その外周側に向けて気体を噴出するためのノズル孔37が複数形成されている。このノズル孔37は、少なくとも、その外周側全周に気体を噴出できるよう、ノズル31の周方向に間隔を隔てて複数設けるのが好ましい。
このノズル31には、シャフト32の内部に形成された流路、あるいはシャフト32に沿って配設された供給管により、図示しない気体供給源から気体が供給される。この気体としては、無菌のものであればよく、空気、窒素などを用いることができる。
【0021】
このような異物除去装置20においては、以下のようにして異物除去工程を行う。
まず、前工程側のスターホイール50から移載された容器100の口部をグリッパ22で保持する。このとき、ホイール21は、スターホイール50と等しい周速度で回転しながら容器100の移載が行われる。なお、容器100は、前工程で上下が倒立状態とされている場合には倒立状態のまま、正立状態であるときには図示しない反転機構により倒立状態とする。
【0022】
等速度で回転するホイール21とともに、グリッパ22に保持された容器100は、ホイール21の周方向に搬送される。その搬送過程において、カムフォロワ36がカム34の上端面34aに倣って変位することでシャフト32が上昇し、ノズル31が容器100内に挿入される。
ノズル31が容器100内に挿入されている間に、気体供給源から供給された気体をノズル孔37から噴出する。噴出された気体は、容器100の内周面に吹き付けられ、容器100の口部100aから外部に吹き出される。
このとき、ノズル31は、気体を噴出しながら、カム34のプロファイル形状に沿って、容器100の口部100aから容器100の内部の所定位置まで移動する(これをスキャンと称する)。ここでは、カムフォロワ36がカム34の最高部分に至ると、ノズル31は、底部100b近傍に到達するものとする。
【0023】
この後、ノズル31は、気体を噴出し続けながら、カム34のプロファイル形状に沿って、容器100の底部100b近傍から口部100aに戻り、そのまま容器100の口部100aから外に出る。
【0024】
このようにして、ノズル31から気体を噴出しながら、容器100の口部100aから底部100b近傍までの区間を往復動させてスキャンすることにより、容器100内の、特に容器100の内周面に付着している異物を吹き飛ばし、容器100の口部100aから外部に排出することができる。
【0025】
なお、異物の除去を確実に行うために、ノズル31から噴出する気体は、たとえば0.2MPa以上の圧縮空気とするのが好ましい。
【0026】
上述したように、水を用いずに異物の除去が行えるので、当然ながら、水の使用量が大幅に削減でき、ランニングコストも低減できる。
なお、殺菌工程と異物除去工程とからなる容器殺菌処理を、このように水を用いずに行えるのは、殺菌工程を上述したように電子線殺菌により行うからである。殺菌工程に殺菌液による殺菌方法を採用していた場合、やはり殺菌液の「すすぎ」工程が必須となる。このように、電子線照射による殺菌工程と、気体吹き付けによる異物除去工程により容器殺菌処理を行うことで、水を用いない完全にドライなシステムを実現することが可能となる。
【0027】
〔第二の実施形態〕
なお、上記第一の実施形態において、異物除去装置20の構成を示したが、これに限るものではない。以下にその変形例を示す。なお、以下の説明においては、上記第一の実施形態と異なる構成のみを説明し、共通する構成については同符号を伏してその説明を省略する。
【0028】
例えば、上記第一の実施形態では、ノズル31を、気体を噴出しながら容器100内を往復動させてスキャンする構成としたが、以下のようにすることも可能である。
すなわち、ノズル31から気体を噴出しながら、容器100の口部100aから底部100b近傍までスキャンさせた後、底部100bから口部100aを経て容器100外に戻るときには、ノズル31からの気体の噴出を停止してもよい。
【0029】
また逆に、ノズル31を、気体を停止させたまま容器100の口部100aから底部100b近傍まで移動させた後、ノズル31から気体を噴出させ、そのまま底部100bから口部100aを経て容器100外までスキャンしてもよい。
【0030】
ただしこの場合、片道のスキャンによっても十分な異物除去性能を確保するために、ノズル31から噴出する気体は、たとえば0.3MPa以上と、上記実施形態よりも高い圧力の圧縮空気とするのが好ましい。
【0031】
このようにしても、容器100内の異物除去を行うことは可能であり、上記と同様の効果を奏することができる。
これにより、気体の噴射圧力が高くても、噴射時間は上記実施形態に対して半減できるので、気体の使用量を低減でき、さらにランニングコストを低減することができる。
【0032】
〔第三の実施形態〕
上記第一、第二の実施形態において、ノズル31から噴出する気体を加湿するのも有効である。
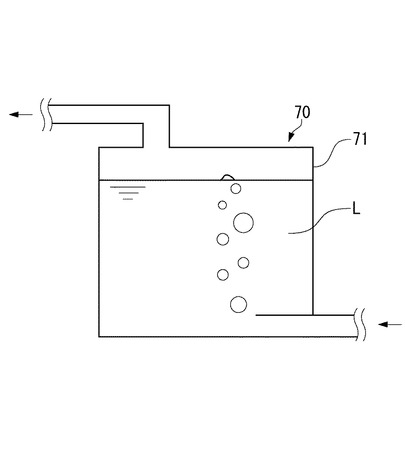
すなわち、ノズル31に供給する気体を、事前に、図6に示すように、加湿装置(加湿手段)70の槽71内に溜めた液体L中にバブリングさせて通過させる等すればよい。このときに用いる液体Lは、無菌水とするのが好ましい。
【0033】
このようにして、加湿した気体をノズル31から容器100内に吹き付けることで、容器100の表面に静電気が発生するのを抑制し、異物の除去効果を高めることができる。
【0034】
〔第四の実施形態〕
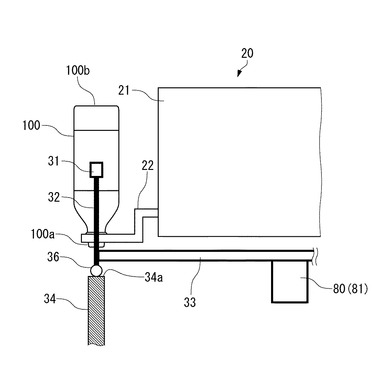
上記第一〜第三の実施形態において、容器100を静電気除去装置80により除電するのも有効である。
すなわち、図7に示すように、静電気により帯電している容器100に発生しているイオンの対イオンを、静電気除去装置80としてのイオン発生器81により発生させる。そして、この、イオン発生器81で発生させた対イオンを、ノズル31に供給する気体に添加するのである。
【0035】
これにより、ノズル31からは、気体とともに、容器100に発生しているイオンの対イオンが供給されるため、電気的に中和され、容器100の静電気を除電することができる。
【0036】
このようにして、容器100に発生しているイオンの対イオンが添加された気体をノズル31から容器100内に吹き付けることで、容器100の表面に静電気が発生するのを抑制し、異物の除去効果を高めることができる。
【実施例】
【0037】
本発明の効果を確認するための検証を行ったので、その結果をここに示す。
(実施例1)
ノズル31には、図5に示したものを用い、このノズル31を、0.2MPaの圧力で空気を噴出しながら、容器100の口部100aから、底部100bの7mm手前までの範囲を、往復1.5secをかけてスキャンさせた(往復スキャン)。
(実施例2)
また、同じノズル31を用い、0.3MPaの圧力で空気を噴出しながら、容器100の底部100bから7mm手前の位置から口部100aまで、片道0.75secをかけてスキャンさせた(片道スキャン)。
【0038】
(比較例1)
比較のため、実施例と同じノズル31を用い、このノズル31を、容器100の口部100aから50mmの位置に固定し、0.3MPaの圧力で空気を1.5sec噴出させた。
(比較例2)
また、シャワー状のノズルを用い、容器100の口部100aから10mmの位置に固定し、4L/minの流量で、水を1.5sec×2回噴出させた。
【0039】
上記のように条件の異なる実施例1、2、比較例1、2のそれぞれにおいて、以下のようにして評価を行った。
容器100は、容量が異なるものを複数種用意した。それぞれの容量の容器100に、所定量の異物を投入し、上記の条件でそれぞれ異物除去処理を行い、処理後に容器100内に残存する異物を計数した。ここで、異物としては、容器100の材料であるPET樹脂、キャップ材料であるPE(ポリエチレン)樹脂、髪の毛を用いた。PET樹脂、PE樹脂については、100〜250メッシュサイズの微細片を、耳掻き1杯分投入した。髪の毛については、5mmの長さのものを3本投入した。
その結果を表1に示す。
【0040】
【表1】

【0041】
表1に示したように、往復スキャンを行った実施例1、圧力を高めて片道スキャンを行った実施例2は、99.9%以上の異物除去が行えており、水を用いた比較例2と同等の結果が得られた(表中「○」印)。つまり、水を用いずとも、気体により異物が十分に除去できることが確認された。
一方、ノズル31をスキャンせずに固定した比較例1においては、残留異物が容易に目視可能であるほど、異物除去が不完全であった(表中「×」印)。つまり、単に気体を噴出したのでは異物除去効果が低く、気体を噴出させながら容器内を移動させてスキャンさせることが重要であることがわかった。
【0042】
なお、上記実施形態においては、ノズル31を容器100に対して昇降させる構成としたが、ノズル31の高さは固定とし、容器100側を昇降させる構成とすることも可能である。
また、ノズル31を、カムフォロワ36により昇降させる構成としたが、これは一例に過ぎず、例えば、エアシリンダ等によりノズル31を昇降させる構成とすることも可能であるのは言うまでもない。
これ以外にも、異物除去装置20以外の殺菌装置10や充填装置30、キャッパ40等については、いかなる構成としてもよいし、それ以外の構成についても、本発明の主旨を逸脱しない限り、上記実施の形態で挙げた構成を取捨選択したり、他の構成に適宜変更することが可能である。
【符号の説明】
【0043】
10…殺菌装置(電子線殺菌装置)、20…異物除去装置、21…ホイール、22…グリッパ、30…充填装置、31…ノズル、32…シャフト、34…カム、34a…上端面、36…カムフォロワ、37…ノズル孔、40…キャッパ、70…加湿装置(加湿手段)、80…静電気除去装置、81…イオン発生器、100…容器、100a…口部、100b…底部
【技術分野】
【0001】
本発明は、飲料などの液体を充填する容器の異物除去装置、電子線殺菌システムに関する。
【背景技術】
【0002】
飲料水等の液体をPETボトルやガラス瓶、ボトル缶等の容器に充填する装置として、回転式の充填装置が用いられている。この回転式の充填装置は、回転する円形のホイールの外周部に複数の充填バルブを備えており、ホイールがほぼ1回転して容器が周方向に搬送される間に、充填バルブから容器内への充填を行う。そして、容器への充填が終了した後、キャッパ(打栓機)により容器へのキャップの装着が行われる。
【0003】
ところで、飲料水等の場合、雑菌等の容器への混入を防ぐことが必須であり、このため、お茶やミネラルウォータ等を充填する場合、クリーンルーム内で、容器殺菌、キャップ殺菌、製品液の充填及びキャップ装着といった一連の工程を行ういわゆる無菌充填方式が採用されている。この場合、容器殺菌方法として、過酢酸、過酸化水素を含む水溶液からなる過酢酸系の殺菌液を用いた殺菌方法を使用し、その後、無菌水を容器内に噴射することにより容器をすすぐことが知られている(例えば、特許文献1参照。)。
【0004】
また、炭酸飲料を充填する場合も、殺菌液として次亜塩素酸ナトリウム溶液を用いて容器の洗浄を行い、その後、水により容器をすすぐことが行われている。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開平8−58744号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかしながら、上記したように、従来の殺菌方法においては、殺菌液による殺菌を行った後、容器内周面に残存する殺菌液を除去するために、無菌水や水によるすすぎを行うことが必須となっている。このため、水を大量に使用する必要があり、使用水量の削減が望まれている。
特に、無菌水を用いる無菌充填方式においては、無菌水は、熱交換器により140℃程度まで加熱して殺菌を行っているため、熱交換器等をはじめとする初期設備投資も大きく、また加熱に用いるエネルギのためのランニングコストもかかるという問題がある。
【0007】
ところで、近年、紫外線よりも殺菌力に勝る電子線照射による殺菌技術が注目され、鋭意開発が行われている。このような電子線殺菌方式においては、当然、殺菌液が容器内周面に残存することもないため、殺菌液除去のためのすすぎ工程は不要である。
しかしながら、製造工程において容器内に混入する可能性のある異物を除去するために、殺菌液による殺菌方式と同様、水を用いて容器をすすぐ必要がある。したがって、電子線殺菌方式を採用する場合においても、使用水量を削減することが望まれているのは共通している。
【0008】
本発明は、このような技術的課題に基づいてなされたもので、殺菌を確実に行いながらも、使用水量を削減し、コストを低減することのできる異物除去装置、電子線殺菌システムを提供することを目的とする。
【課題を解決するための手段】
【0009】
かかる目的のもとになされた本発明の異物除去装置は、気体を外周側に向けて噴出するノズル孔を有したノズルと、倒立状態に保持された容器に対し、ノズルを容器内に相対的に進入させるノズル駆動機構と、を備える。そして、ノズルを容器内に進入させ、ノズル孔から気体を噴出させながら容器の高さ方向に沿って移動させることで、容器内の異物を除去することを特徴とする。
気体を噴出させながら容器内を移動させる(この動作を「スキャン」と称する)ことで、容器内の異物を確実に除去できる。
【0010】
ここで、ノズルは、ノズル孔から気体を噴出させながら、容器の口部から底部に向けて移動させた後、底部から口部に向けて移動させる、つまりノズル内で往復動させるのが、異物の確実な除去のためには好ましい。
また、ノズルは、ノズル孔から気体を噴出させながら、容器の口部から底部、または底部から口部に向けて移動させてもよい。つまり、ノズルを往復動させる間、往路または復路のいずれか一方で、気体を噴出しながらスキャンを行うのである。この場合、気体を噴出しながら往復動する場合に比較し、気体の圧力を高めるのが好ましい。
【0011】
また、ノズルから噴出する気体を加湿する加湿手段をさらに備えても良い。
また、容器に発生しているイオンの対イオンを発生させ、ノズルから噴出する気体に添加するイオン発生器をさらに備えるようにしても良い。
【0012】
本発明は、容器に電子線を照射することで容器を殺菌する電子線殺菌装置と、電子線殺菌装置で殺菌された容器内に気体を吹き付けることで容器内の異物を除去する異物除去装置と、を備える電子線殺菌システムとすることもできる。この場合、このシステムは、異物除去装置が、気体を外周側に向けて噴出するノズル孔を有したノズルと、倒立状態に保持された容器に対し、ノズルを容器内に相対的に進入させるノズル駆動機構と、を備えることを特徴とする。
また、ノズルを容器内に進入させ、ノズル孔から気体を噴出させながら容器の高さ方向に沿って移動させることで、容器内の異物を除去するのが好ましい。
【発明の効果】
【0013】
本発明によれば、ノズルから気体を噴出しながら、容器内をスキャンさせることにより、容器内から異物を除去することができる。このようにして、水を用いずに異物の除去が行えるので、当然ながら、水の使用量が大幅に削減でき、ランニングコストも低減できる。
【0014】
また、本発明の電子線殺菌システムにおいては、殺菌工程と異物除去工程とからなる容器殺菌処理を、水を用いずに行える。すなわち、水を用いない完全にドライな電子線殺菌システムを実現することが可能となる。
【図面の簡単な説明】
【0015】
【図1】本実施の形態における容器殺菌方法を用いた飲料充填工程の流れを示す図である。
【図2】飲料充填工程を実施する飲料充填設備の概要を示す図である。
【図3】異物除去装置における異物除去処理の流れを示すため、異物除去装置を周方向に展開した図である。
【図4】異物除去装置において、容器を保持するグリッパおよびノズルを示す側断面図である。
【図5】ノズル形状の一例を示す断面図である。
【図6】加湿装置の一例を示す図である。
【図7】イオン発生器を備えた例における、容器を保持するグリッパおよびノズルを示す側断面図である。
【発明を実施するための形態】
【0016】
以下、添付図面に示す実施の形態に基づいてこの発明を詳細に説明する。
〔第一の実施形態〕
図1は、本実施の形態における飲料充填工程の流れを示す図であり、図2は、飲料充填工程を実施する飲料充填設備の概要を示す図である。
図1、図2に示すように、飲料充填設備においては、供給された容器に対し、殺菌装置(電子線殺菌装置)10において電子線照射により殺菌する殺菌工程、異物除去装置20において容器の異物を除去する異物除去工程、充填装置30において容器に液体を充填する充填工程、液体が充填された容器にキャッパ40においてキャップを装着するキャッピング工程、を順次経ることで、容器への飲料の充填が行われる。なお、互いに前後する装置間においては、スターホイール50や搬送コンベア60により容器が搬送される。
【0017】
殺菌工程において用いられる殺菌装置10は、ボトルを搬送しながらボトルに電子線を照射して殺菌を行う。ここで、殺菌装置10自体については、本発明において何らの限定をする意図はなく、いかなる構成のものを用いても良い。また、殺菌装置10においては、キャッパ40で装着するキャップに対し、容器と並行して電子線照射による殺菌を行うこともできる。
【0018】
異物除去装置20は、殺菌装置10とともに電子線殺菌システムを構成するもので、直前工程の殺菌装置10と、直後工程の充填装置30との間に配置されている。
図3は、異物除去装置20の概略構成を示すための図であり、平面視円形の異物除去装置20を展開して側面視したものである。
異物除去装置20には、円盤状のホイール21が設けられている。このホイール21は、モーターなどの駆動源(図示せず)によって、ほぼ水平面内で回転駆動される。ホイール21の外周部には、容器100を倒立状態で保持するグリッパ22がホイール21の周方向に一定間隔ごとに配置されている。なお、図3においては、グリッパ22を5組のみ図示しているが、これはあくまでも動作説明のためであり、実際には多数のグリッパ22がホイール21の外周部に設けられる。
【0019】
各グリッパ22に対向した位置には、倒立状態の容器100内にエアを噴出するためのノズル31が設けられている。このノズル31は、シャフト32の上端部に設けられている。図4に示すように、シャフト32は、ホイール21の外周側に向けて延出するアーム33の先端部に、上下方向に昇降可能に支持されている。シャフト32の下方には、ノズル駆動機構として、ホイール21と同心状に設けられた、環状のカム34が設けられている。カム34は、その上端面34aの高さが、ホイール21の周方向の一部において高く形成されている。シャフト32の下端部には、カム34の上端面34aに沿って摺動するカムフォロワ36が設けられている。
ホイール21が回転すると、カムフォロワ36がカム34の上端面34aに倣って上下方向に変位し、これによってシャフト32が昇降する。シャフト32の上端部に設けられたノズル31は、当初は、グリッパ22に保持されて倒立状態にある容器100に対し、容器100の口部100aよりも下方に位置している。ホイール21の回転によりカム34に沿ってシャフト32が上昇すると、ノズル31が容器100内に挿入され、シャフト32が下降すると、ノズル31は容器100内から外に出る。
このとき、ノズル31の容器100内への挿入高さの最大値H(すなわち、カム34の最大リフト量)は、容器100のサイズ等に応じて適宜設定される。
【0020】
図5に示すように、ノズル31には、その外周側に向けて気体を噴出するためのノズル孔37が複数形成されている。このノズル孔37は、少なくとも、その外周側全周に気体を噴出できるよう、ノズル31の周方向に間隔を隔てて複数設けるのが好ましい。
このノズル31には、シャフト32の内部に形成された流路、あるいはシャフト32に沿って配設された供給管により、図示しない気体供給源から気体が供給される。この気体としては、無菌のものであればよく、空気、窒素などを用いることができる。
【0021】
このような異物除去装置20においては、以下のようにして異物除去工程を行う。
まず、前工程側のスターホイール50から移載された容器100の口部をグリッパ22で保持する。このとき、ホイール21は、スターホイール50と等しい周速度で回転しながら容器100の移載が行われる。なお、容器100は、前工程で上下が倒立状態とされている場合には倒立状態のまま、正立状態であるときには図示しない反転機構により倒立状態とする。
【0022】
等速度で回転するホイール21とともに、グリッパ22に保持された容器100は、ホイール21の周方向に搬送される。その搬送過程において、カムフォロワ36がカム34の上端面34aに倣って変位することでシャフト32が上昇し、ノズル31が容器100内に挿入される。
ノズル31が容器100内に挿入されている間に、気体供給源から供給された気体をノズル孔37から噴出する。噴出された気体は、容器100の内周面に吹き付けられ、容器100の口部100aから外部に吹き出される。
このとき、ノズル31は、気体を噴出しながら、カム34のプロファイル形状に沿って、容器100の口部100aから容器100の内部の所定位置まで移動する(これをスキャンと称する)。ここでは、カムフォロワ36がカム34の最高部分に至ると、ノズル31は、底部100b近傍に到達するものとする。
【0023】
この後、ノズル31は、気体を噴出し続けながら、カム34のプロファイル形状に沿って、容器100の底部100b近傍から口部100aに戻り、そのまま容器100の口部100aから外に出る。
【0024】
このようにして、ノズル31から気体を噴出しながら、容器100の口部100aから底部100b近傍までの区間を往復動させてスキャンすることにより、容器100内の、特に容器100の内周面に付着している異物を吹き飛ばし、容器100の口部100aから外部に排出することができる。
【0025】
なお、異物の除去を確実に行うために、ノズル31から噴出する気体は、たとえば0.2MPa以上の圧縮空気とするのが好ましい。
【0026】
上述したように、水を用いずに異物の除去が行えるので、当然ながら、水の使用量が大幅に削減でき、ランニングコストも低減できる。
なお、殺菌工程と異物除去工程とからなる容器殺菌処理を、このように水を用いずに行えるのは、殺菌工程を上述したように電子線殺菌により行うからである。殺菌工程に殺菌液による殺菌方法を採用していた場合、やはり殺菌液の「すすぎ」工程が必須となる。このように、電子線照射による殺菌工程と、気体吹き付けによる異物除去工程により容器殺菌処理を行うことで、水を用いない完全にドライなシステムを実現することが可能となる。
【0027】
〔第二の実施形態〕
なお、上記第一の実施形態において、異物除去装置20の構成を示したが、これに限るものではない。以下にその変形例を示す。なお、以下の説明においては、上記第一の実施形態と異なる構成のみを説明し、共通する構成については同符号を伏してその説明を省略する。
【0028】
例えば、上記第一の実施形態では、ノズル31を、気体を噴出しながら容器100内を往復動させてスキャンする構成としたが、以下のようにすることも可能である。
すなわち、ノズル31から気体を噴出しながら、容器100の口部100aから底部100b近傍までスキャンさせた後、底部100bから口部100aを経て容器100外に戻るときには、ノズル31からの気体の噴出を停止してもよい。
【0029】
また逆に、ノズル31を、気体を停止させたまま容器100の口部100aから底部100b近傍まで移動させた後、ノズル31から気体を噴出させ、そのまま底部100bから口部100aを経て容器100外までスキャンしてもよい。
【0030】
ただしこの場合、片道のスキャンによっても十分な異物除去性能を確保するために、ノズル31から噴出する気体は、たとえば0.3MPa以上と、上記実施形態よりも高い圧力の圧縮空気とするのが好ましい。
【0031】
このようにしても、容器100内の異物除去を行うことは可能であり、上記と同様の効果を奏することができる。
これにより、気体の噴射圧力が高くても、噴射時間は上記実施形態に対して半減できるので、気体の使用量を低減でき、さらにランニングコストを低減することができる。
【0032】
〔第三の実施形態〕
上記第一、第二の実施形態において、ノズル31から噴出する気体を加湿するのも有効である。
すなわち、ノズル31に供給する気体を、事前に、図6に示すように、加湿装置(加湿手段)70の槽71内に溜めた液体L中にバブリングさせて通過させる等すればよい。このときに用いる液体Lは、無菌水とするのが好ましい。
【0033】
このようにして、加湿した気体をノズル31から容器100内に吹き付けることで、容器100の表面に静電気が発生するのを抑制し、異物の除去効果を高めることができる。
【0034】
〔第四の実施形態〕
上記第一〜第三の実施形態において、容器100を静電気除去装置80により除電するのも有効である。
すなわち、図7に示すように、静電気により帯電している容器100に発生しているイオンの対イオンを、静電気除去装置80としてのイオン発生器81により発生させる。そして、この、イオン発生器81で発生させた対イオンを、ノズル31に供給する気体に添加するのである。
【0035】
これにより、ノズル31からは、気体とともに、容器100に発生しているイオンの対イオンが供給されるため、電気的に中和され、容器100の静電気を除電することができる。
【0036】
このようにして、容器100に発生しているイオンの対イオンが添加された気体をノズル31から容器100内に吹き付けることで、容器100の表面に静電気が発生するのを抑制し、異物の除去効果を高めることができる。
【実施例】
【0037】
本発明の効果を確認するための検証を行ったので、その結果をここに示す。
(実施例1)
ノズル31には、図5に示したものを用い、このノズル31を、0.2MPaの圧力で空気を噴出しながら、容器100の口部100aから、底部100bの7mm手前までの範囲を、往復1.5secをかけてスキャンさせた(往復スキャン)。
(実施例2)
また、同じノズル31を用い、0.3MPaの圧力で空気を噴出しながら、容器100の底部100bから7mm手前の位置から口部100aまで、片道0.75secをかけてスキャンさせた(片道スキャン)。
【0038】
(比較例1)
比較のため、実施例と同じノズル31を用い、このノズル31を、容器100の口部100aから50mmの位置に固定し、0.3MPaの圧力で空気を1.5sec噴出させた。
(比較例2)
また、シャワー状のノズルを用い、容器100の口部100aから10mmの位置に固定し、4L/minの流量で、水を1.5sec×2回噴出させた。
【0039】
上記のように条件の異なる実施例1、2、比較例1、2のそれぞれにおいて、以下のようにして評価を行った。
容器100は、容量が異なるものを複数種用意した。それぞれの容量の容器100に、所定量の異物を投入し、上記の条件でそれぞれ異物除去処理を行い、処理後に容器100内に残存する異物を計数した。ここで、異物としては、容器100の材料であるPET樹脂、キャップ材料であるPE(ポリエチレン)樹脂、髪の毛を用いた。PET樹脂、PE樹脂については、100〜250メッシュサイズの微細片を、耳掻き1杯分投入した。髪の毛については、5mmの長さのものを3本投入した。
その結果を表1に示す。
【0040】
【表1】
【0041】
表1に示したように、往復スキャンを行った実施例1、圧力を高めて片道スキャンを行った実施例2は、99.9%以上の異物除去が行えており、水を用いた比較例2と同等の結果が得られた(表中「○」印)。つまり、水を用いずとも、気体により異物が十分に除去できることが確認された。
一方、ノズル31をスキャンせずに固定した比較例1においては、残留異物が容易に目視可能であるほど、異物除去が不完全であった(表中「×」印)。つまり、単に気体を噴出したのでは異物除去効果が低く、気体を噴出させながら容器内を移動させてスキャンさせることが重要であることがわかった。
【0042】
なお、上記実施形態においては、ノズル31を容器100に対して昇降させる構成としたが、ノズル31の高さは固定とし、容器100側を昇降させる構成とすることも可能である。
また、ノズル31を、カムフォロワ36により昇降させる構成としたが、これは一例に過ぎず、例えば、エアシリンダ等によりノズル31を昇降させる構成とすることも可能であるのは言うまでもない。
これ以外にも、異物除去装置20以外の殺菌装置10や充填装置30、キャッパ40等については、いかなる構成としてもよいし、それ以外の構成についても、本発明の主旨を逸脱しない限り、上記実施の形態で挙げた構成を取捨選択したり、他の構成に適宜変更することが可能である。
【符号の説明】
【0043】
10…殺菌装置(電子線殺菌装置)、20…異物除去装置、21…ホイール、22…グリッパ、30…充填装置、31…ノズル、32…シャフト、34…カム、34a…上端面、36…カムフォロワ、37…ノズル孔、40…キャッパ、70…加湿装置(加湿手段)、80…静電気除去装置、81…イオン発生器、100…容器、100a…口部、100b…底部
【特許請求の範囲】
【請求項1】
気体を外周側に向けて噴出するノズル孔を有したノズルと、
倒立状態に保持された容器に対し、前記ノズルを前記容器内に相対的に進入させるノズル駆動機構と、を備え、
前記ノズルを前記容器内に進入させ、前記ノズル孔から気体を噴出させながら前記容器の高さ方向に沿って移動させることで、前記容器内の異物を除去することを特徴とする異物除去装置。
【請求項2】
前記ノズルを、前記ノズル孔から前記気体を噴出させながら、前記容器の口部から底部に向けて移動させた後、前記底部から前記口部に向けて移動させることを特徴とする請求項1に記載の異物除去装置。
【請求項3】
前記ノズルを、前記ノズル孔から前記気体を噴出させながら、前記容器の口部から底部、または前記底部から前記口部に向けて移動させることを特徴とする請求項1に記載の異物除去装置。
【請求項4】
前記ノズルから噴出する前記気体を加湿する加湿手段をさらに備えることを特徴とする請求項1から3のいずれかに記載の異物除去装置。
【請求項5】
前記容器に発生しているイオンの対イオンを発生させ、前記ノズルから噴出する前記気体に添加するイオン発生器をさらに備えることを特徴とする請求項1から4のいずれかに記載の異物除去装置。
【請求項6】
容器に電子線を照射することで前記容器を殺菌する電子線殺菌装置と、
前記電子線殺菌装置で殺菌された前記容器内に気体を吹き付けることで前記容器内の異物を除去する異物除去装置と、を備え、
前記異物除去装置は、
前記気体を外周側に向けて噴出するノズル孔を有したノズルと、
倒立状態に保持された前記容器に対し、前記ノズルを前記容器内に相対的に進入させるノズル駆動機構と、を備えることを特徴とする電子線殺菌システム。
【請求項7】
前記ノズルを前記容器内に進入させ、前記ノズル孔から前記気体を噴出させながら前記容器の高さ方向に沿って移動させることで、前記容器内の異物を除去することを特徴とする請求項6に記載の電子線殺菌システム。
【請求項1】
気体を外周側に向けて噴出するノズル孔を有したノズルと、
倒立状態に保持された容器に対し、前記ノズルを前記容器内に相対的に進入させるノズル駆動機構と、を備え、
前記ノズルを前記容器内に進入させ、前記ノズル孔から気体を噴出させながら前記容器の高さ方向に沿って移動させることで、前記容器内の異物を除去することを特徴とする異物除去装置。
【請求項2】
前記ノズルを、前記ノズル孔から前記気体を噴出させながら、前記容器の口部から底部に向けて移動させた後、前記底部から前記口部に向けて移動させることを特徴とする請求項1に記載の異物除去装置。
【請求項3】
前記ノズルを、前記ノズル孔から前記気体を噴出させながら、前記容器の口部から底部、または前記底部から前記口部に向けて移動させることを特徴とする請求項1に記載の異物除去装置。
【請求項4】
前記ノズルから噴出する前記気体を加湿する加湿手段をさらに備えることを特徴とする請求項1から3のいずれかに記載の異物除去装置。
【請求項5】
前記容器に発生しているイオンの対イオンを発生させ、前記ノズルから噴出する前記気体に添加するイオン発生器をさらに備えることを特徴とする請求項1から4のいずれかに記載の異物除去装置。
【請求項6】
容器に電子線を照射することで前記容器を殺菌する電子線殺菌装置と、
前記電子線殺菌装置で殺菌された前記容器内に気体を吹き付けることで前記容器内の異物を除去する異物除去装置と、を備え、
前記異物除去装置は、
前記気体を外周側に向けて噴出するノズル孔を有したノズルと、
倒立状態に保持された前記容器に対し、前記ノズルを前記容器内に相対的に進入させるノズル駆動機構と、を備えることを特徴とする電子線殺菌システム。
【請求項7】
前記ノズルを前記容器内に進入させ、前記ノズル孔から前記気体を噴出させながら前記容器の高さ方向に沿って移動させることで、前記容器内の異物を除去することを特徴とする請求項6に記載の電子線殺菌システム。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2010−179927(P2010−179927A)
【公開日】平成22年8月19日(2010.8.19)
【国際特許分類】
【出願番号】特願2009−23550(P2009−23550)
【出願日】平成21年2月4日(2009.2.4)
【出願人】(505193313)三菱重工食品包装機械株式会社 (146)
【出願人】(000006208)三菱重工業株式会社 (10,378)
【Fターム(参考)】
【公開日】平成22年8月19日(2010.8.19)
【国際特許分類】
【出願日】平成21年2月4日(2009.2.4)
【出願人】(505193313)三菱重工食品包装機械株式会社 (146)
【出願人】(000006208)三菱重工業株式会社 (10,378)
【Fターム(参考)】
[ Back to top ]