
疑似目標除去装置および移動体自動識別装置
【目的】本発明は、目標からレーダに到来した受信波を処理し、実質的に同じ目標による重複した反射に起因して識別される複数の目標を一本化する疑似目標除去装置と、搭載された移動体の識別情報に併せて上記一本化の拠り所となる情報を無線伝送路を介して外部に通知する移動体自動識別装置とに関し、ハードウェアの構成が大幅に変更されることなく、目標の識別精度を高め、かつ安定に維持することを目的とする。
【解決手段】目標が位置する領域を識別する領域識別手段と、レーダが受信した受信波で示される目標の内、前記領域に位置する目標を一本化し、1つの目標として検出する目標検出手段とを備える。
【解決手段】目標が位置する領域を識別する領域識別手段と、レーダが受信した受信波で示される目標の内、前記領域に位置する目標を一本化し、1つの目標として検出する目標検出手段とを備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、目標からレーダに到来した受信波を処理し、実質的に同じ目標による重複した反射に起因して識別される複数の目標を一本化する疑似目標除去装置と、搭載された移動体の識別情報に併せて上記一本化の拠り所となる情報を無線伝送路を介して外部に通知する移動体自動識別装置とに関する。
【背景技術】
【0002】
近年、船舶等の移動体には、高度に進展した航法、電子技術および情報処理技術が適用され、運行等に関連する安全性の確保や省力化に併せて、環境対策およびコストの削減が多様に図られつつある。
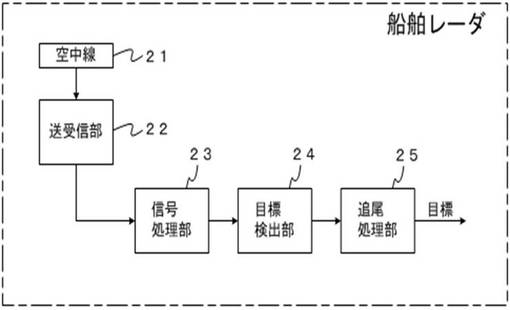
従来の船舶レーダは、図4に示すように、以下の要素から構成される。
(1) 空中線21
(2) 目標が位置し得る方向およびレンジの範囲に、空中線21を介して所定の送信波を送信し、その送信波が目標で反射することに生じた受信波を空中線21を介して受信する送受信部22
(3) 送受信部22によって上記受信波が復調されることによって生成されたビデオ信号に海面反射の除去等の信号処理を施す信号処理部23
(4) 信号処理部23が上記信号処理の結果として出力するディジタル信号から個々の目標を検出し、これらの目標の位置情報を出力する目標検出部24
(5) 目標検出部24によって出力された位置情報に基づいて、PPI(Plan Position Indicator)スコープ上の所望のレンジ内に位置する目標を追尾する追尾処理部25
なお、本発明に関連する先行技術としては、以下に列記されるものがある。
(1) レーダセンサを用いて目標を追尾するために、ビデオ信号を2値化してターゲットテーブルを生成し、そのターゲットテーブルに形成されるエッジを検出すると共に、検出されたエッジに基づいて検出される目標の機影から目標の重心を求め、その機影から抽出される目標の機首の動きに基づいて目標の旋回状態を判定する点に特徴がある「目標追尾装置」および「目標追尾方法」
(2) 複数の目標をグループ化して追尾し、かつグループ情報と追尾情報とを比較することによって追尾対象毎に適切な情報を選択すると共に、適切なトラックデータを作成する点に特徴がある「レーダ追尾装置」
(3) 部分領域毎に観測時刻における目標の航跡を予測し、予測値に基づいて航跡のゲートを算出すると共に、全領域の観測が終了するまで、部分領域毎の観測時刻に併せてゲート判定した結果をゲート内判定行列に反映させ、全領域の観測が終了した場合に、現サンプリング区間に対応させる仮説および航跡の更新処理を実行することにより、観測領域内の観測値が同一時刻に得られない場合にも、精度のよい追尾を可能とする点に特徴がある「目標追尾装置」
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開平11−304915号公報
【特許文献2】特開2003−248057号公報
【特許文献3】特開2004−233136号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
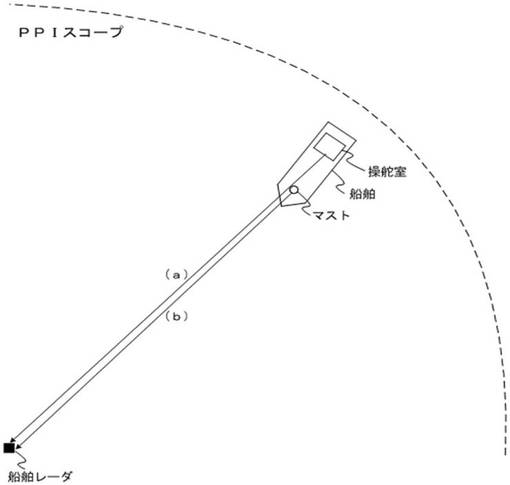
ところで、上述した従来の船舶レーダでは、遠距離に位置する巨大船舶から到来する反射波は、その巨大船舶の船首の向きによっては、図5(a),(b)に示すように、甲板上にあるマスト等の複数の反射体によって個別に発生する。
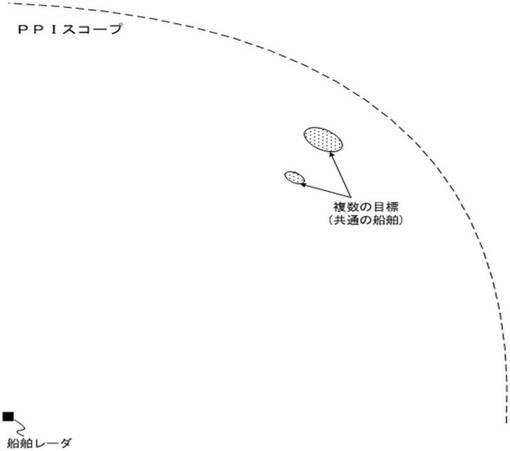
したがって、このような巨大船舶は、物理的には単一であるにもかかわらず、船舶レーダのPPIスコープ上では、図6に示すように、複数の目標として識別される場合があった。
【0005】
また、このような現象は、特に、錨泊地に投錨し、かつ船首方向が潮の流れに応じて絶え間なく変化する巨大船舶で頻繁に発生する場合が多かった。
しかし、このような現象が発生すると、追尾処理部25は、追尾処理の過程では、船首の向きに応じて、単一の船舶が異なる複数の船舶と識別し、あるいは単一の船舶と識別する。
したがって、追尾処理の精度が頻繁に劣化し、観測者がPPIスコープ上で誤った認識を行う可能性があった。
【0006】
なお、上記反射波が生じる船舶にAISトランスポンダが搭載されている場合には、そのAISトランスポンダによって得られた情報と、既述の追尾処理の結果として得られた情報とが重複して表示されることを防止するために、これらの情報の統合が図られる場合がある。
【0007】
しかし、このような情報の統合は、AISトランスポンダによって得られた情報との統合が追尾処理の対象となる目標毎に行われる。
したがって、単一の船舶であっても複数の目標として表示され、観測者が誤った認識を行う可能性は解消されなかった。
【0008】
本発明は、ハードウェアの構成が大幅に変更されることなく目標の識別精度を高め、かつ安定に維持できる疑似目標除去装置および移動体自動識別装置を提供することを目的とする。
【課題を解決するための手段】
【0009】
請求項1に記載の発明では、領域識別手段は、目標が位置する領域を識別する。目標検出手段は、レーダが受信した受信波で示される目標の内、前記領域に位置する目標を一本化し、1つの目標として検出する。
すなわち、共通の目標で生じた複数の反射波に対応して個別に識別され得る目標は、その共通の目標が位置する領域内で生じた反射波の何れか1つに対応する1つの目標に一本化されて識別される。
【0010】
請求項2に記載の発明では、測位手段は、レーダが受信した受信波で示される個々の目標の位置を求める。目標検出手段は、前記個々の目標の位置に対応してデータベースに登録されている目標を一本化し、1つの目標として検出する。
すなわち、共通の目標で生じた複数の反射波に対応して個別に識別され得る目標は、その共通の目標が位置する領域内で生じた反射波の何れか1つに対応する1つの目標に一本化されて識別される。
【0011】
請求項3に記載の発明では、測位手段は、移動体の位置を特定する。報知手段は、前記移動体の位置およびサイズに併せて、前記移動体の形状を前記無線伝送路を介して外部に報知する。
すなわち、本発明に係る移動体自動識別装置が備えられた移動体は、測距や測位がその移動体の位置およびサイズだけではなく、形状にも基づいて精度よく実現可能となる。
【発明の効果】
【0012】
本発明によれば、大きな目標であっても、その目標の形状、姿勢および状態の如何にかかわらず、精度よく安定に1つの目標として識別される。
本発明では、目標は、反射体としての形状や寸法がその目標の姿勢に応じて変化し、あるいは形状が複雑である場合であっても、実体とは異なる複数の目標として識別され難くなる。
【0013】
本発明によれば、多様な目標の測位が精度よく実現される。
本発明によれば、確保されるべき処理量が無用に大きくなり、あるいは応答性が過度に低下することが回避される。
本発明に係る移動体自動識別装置が備えられた移動体は、形状が複雑であっても、実体とは異なる複数の目標として識別され難くなる。
【0014】
したがって、本発明が適用された移動体は、形状、寸法、姿勢、速度、種類、進路、状態、積載物の如何にかかわらず、他の移動体との相互の測距や測位を精度よく行うことができ、かつ運行や移動の安全性が高められると共に、高く維持される。
【図面の簡単な説明】
【0015】
【図1】本発明の一実施形態を示す図である。
【図2】本実施形態の動作フローチャートである。
【図3】本実施形態の動作を説明する図である。
【図4】従来の船舶レーダの構成例を示す図である。
【図5】甲板上にある複数の反射体によって反射波が個別に発生するメカニズムを示す図である。
【図6】PPIスコープ上に表示される複数の目標を示す図である。
【発明を実施するための形態】
【0016】
以下、図面に基づいて本発明の実施形態について詳細に説明する。
図1は、本発明の一実施形態を示す図である。
図において、図4に示すものと機能が同じものについては、図4と同じ符号を付与して示し、ここでは、説明を省略する。
【0017】
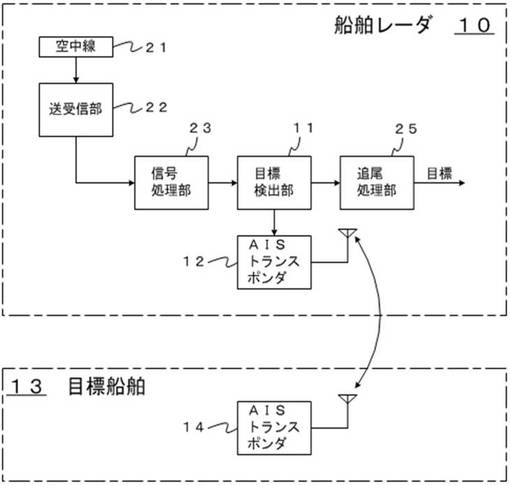
本実施形態と図4に示す従来例との構成の相違点は、以下の点にある。
(1) 本実施形態に係る船舶レーダ10は、目標検出部24に代えて目標検出部11が備えられ、その目標検出部11のモニタ入力にAISトランスポンダ12の出力が接続されることによって構成される。
【0018】
(2) 船舶レーダ10が搭載された船舶(以下、「自船舶」という。)とは異なる船舶であって、既述の大型船舶に該当する船舶(以下、「目標船舶」という。)13には、構成および機能が上記AISトランスポンダ12と同じであるAISトランスポンダ14が備えられる。
【0019】
図2は、本実施形態の動作フローチャートである。
図3は、本実施形態の動作を説明する図である。
以下、図1〜図3を参照して本実施形態の動作を説明する。
【0020】
目標船舶13に備えられたAISトランスポンダ14は、通常のAISトランスポンダとは異なり、例えば、以下の項目に併せて、所定の無線回線を介して所定の頻度で他の船舶や海岸局宛に目標船舶13の「形状」を示す情報を通知する。
【0021】
(A) 船首方位θ、船位、センサ位置、船体長L、船幅W、船種、航海の状態、積載物、対地進路、対地船速、目的地
(B) 船名、MMSI(Maritime Mobile Service Identity)番号、IMO(International Maritime Organization)番号、呼び出し符号、UTC(Coordinated
Universal Time)、回頭角速度、喫水
【0022】
なお、上記目標船舶13の形状を示す情報については、以下では、その形状を多角形で近似されることと仮定し、「ポリゴンデータ」と称する。
また、上記(B) に列記される項目については、本実施例では、本発明の特徴とは密接な関係がないため、以下では、詳細な説明を省略する。
【0023】
さらに、以下では、目標船舶が追尾の対象となる程度の船速で航行していることを前提とし、AISトランスポンダ14が上記項目および「ポリゴンデータ」を他の船舶や海岸局宛に通知する周期については、例えば、「2秒」であると仮定する。
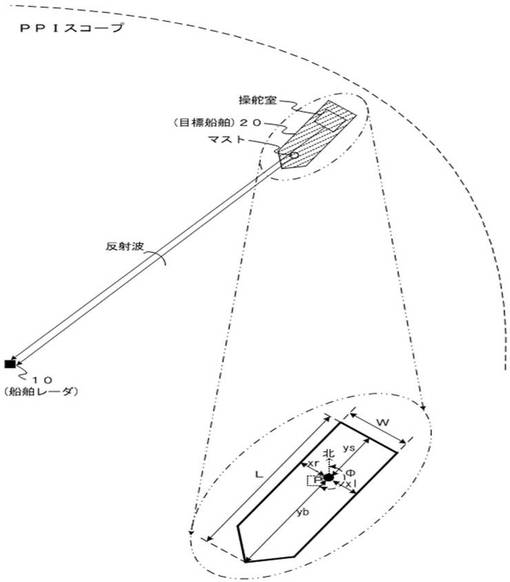
また、上記「センサ位置」は、図3に示すように、船位の計測に供されるGPSアンテナが設置された目標船舶13上の位置(以下、「基準点」という。)Pを基準として予め設定された以下の4つの距離の組み合わせとして与えられる。
【0024】
(1) 基準点Pから左舷側までの距離xl
(2) 基準点Pから右舷側までの距離xr
(3) 基準点Pから船首までの距離yb
(4) 基準点Pから船首までの距離ys
【0025】
一方、船舶レーダ10では、空中線21、送受信部22および信号処理部23は、従来例と同様に連係することにより、自船舶の周囲に位置する船舶(目標船舶13を含む。)の測位および測距の処理を行い、その処理の結果としてディジタル信号を出力する。
なお、以下では、空中線21を介して行われるスキャンの周期は、例えば、上記「2秒」の周期と大幅には異ならない「3秒」であると仮定する。
【0026】
本発明の特徴は、本実施形態では、目標検出部11がAISトランスポンダ12と連係して行う以下の処理にある。
AISトランスポンダ12は、目標船舶13に備えられたAISトランスポンダ14から無線伝送された船首方位θ、船位、センサ位置、船体長L、船幅W、船種、航海の状態、積載物、対地進路、対地船速、目的地およびポリゴンデータを取得する。
【0027】
目標検出部11は、これらの船首方位θ、船位、センサ位置、船体長L、船幅W、船種、航海の状態、積載物、対地進路、対地船速、目的地およびポリゴンデータに基づいて以下の処理を行う。
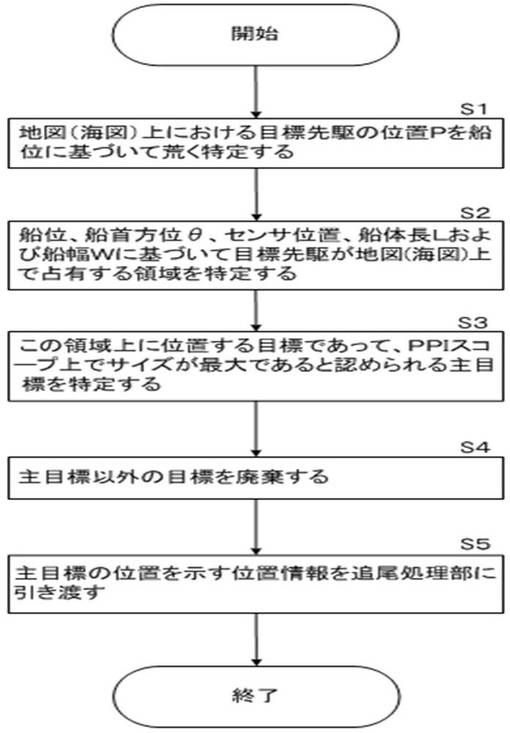
(1) 地図(海図)上における目標船舶13の位置Pを図3に示すように上記船位に基づいて荒く特定する(図2ステップS1)。
(2) この船位に併せて、既述の船首方位θ、センサ位置(xl、xr、yb、ys)、船体長Lおよび船幅Wに基づいて、図3のハンチング部に示すように、目標船舶13が地図(海図)上で占有する領域を特定する(図2ステップS2)。
【0028】
(3) 上記ディジタル信号で示される目標の内、このような領域上に位置する目標であってPPIスコープ上でのサイズが最大であると認められる目標(以下、「主目標」という。)を特定する(図2ステップS3)。
(4) このような主目標以外の目標を廃棄する(図2ステップ4)。
(5) 主目標の位置を示す位置情報を追尾処理部25に引き渡す(図2ステップ5)。
【0029】
すなわち、追尾処理部25は、目標船舶13の甲板上にあるマスト等の複数の反射体から空中線21に反射波が個別に到来しても、その目標船舶13の主要な反射体から到来した1つの反射波で特定される位置情報に基づいて、PPIスコープ上に表示されるべき目標の追尾を行うことができる。
したがって、本実施形態によれば、観測者が上記PPIスコープ上で誤った認識を行う可能性が確度高く排除され、かつ追尾処理の精度が安定に高く維持される。
【0030】
なお、本実施形態では、目標船舶13の船首方位θ、船位、センサ位置、船体長L、船幅WおよびポリゴンデータがAISトランスポンダ14によって通知されている。しかし、これらの船首方位θ、船位、センサ位置、船体長L、船幅Wおよびポリゴンデータは、以下のどのような形態で自船舶の目標検出部11に与えられてもよい。
【0031】
(1) AISトランスポンダ14に代わる多様な航行援助装置あるいは航行援助システム
(2) 目標船舶13に搭載され、自船舶の空中線21から到来した送信波に応答するトランスポンダ
(3) 自船舶との間に形成された何らかの通信手段を介してアクセスが可能であり、かつ目標船舶13から通知されたMMSI番号等のユニークな識別情報に基づいて検索することが可能であるデータベース
【0032】
また、本発明は、既述の船舶用レーダに限定されず、航空機や車両等の様々な移動体の測位や測距を安定に精度よく実現するための多様なレーダにも同様に適用可能である。
さらに、本実施形態では、船首方位θ、船位、センサ位置(xl、xr、yb、ys)、船体長L、船幅Wおよびポリゴンデータに基づいて、地図(海図)上で目標船舶13が占有する領域が特定されている。しかし、このような領域は、目標船舶の形状が正方形、矩形、円形等と見なすことができ、あるいは精度の低下が許容される場合には、以下の組み合わせ(1)、(2)の何れかに基づいて求められてもよい。
【0033】
(1) 船位、船首方位θ、船体長L、船幅W
(2) 船位、船体長L、船幅W
また、このような領域の特定は、近距離では、二次元の直行座標系に基づいて特定可能であるが、例えば、球面座標系その他の多様な三次元の座標系に基づいて特定されてもよい。
【0034】
さらに、既述の主目標は、「領域上に位置する目標であってPPIスコープ上でのサイズが最大である目標」でなくてもよく、例えば、ディジタル信号で示される目標の内、「空中線21に到来した受信波の電力の総和が最大である目標」であってもよく、「ラベリングシステムが適用されることによって特定される上記領域の重心に位置する(と見なすことが可能である)目標」であってもよい。
【0035】
また、本実施形態では、既述の領域の特定および主目標の特定を実現する処理は、目標の属性の如何にかかわらず行われている。しかし、このような処理の優先度が以下の通りに設定されることにより、必要な処理量や消費電力の削減、あるいは応答性の向上が図られてもよい。
【0036】
(1) 主目標の選択の必要性がない小型船等を「船種」に基づいて識別し、優先度を低く設定し、あるいは上記処理の対象外とする。
(2) 「対地進路」に基づいて、自船舶の進路との共通性が高く、かつ衝突の危険性が高い船舶の優先度を高く設定する。
【0037】
(3) 「目的地」と自船舶の目的地との地理的な隔たりが小さく、かつ衝突の危険性が高い船舶の優先度を高く設定する。
(4) 「対地船速」が速く、自船舶との衝突の危険性が高い船舶の優先度を高く設定する。
【0038】
(5) 「航海の状態」に基づきアンカリング中や接岸中と予測される船舶のように、主目標を特定する必要性が高い船舶の優先度を高く設定する。
(6) 衝突等に際して被る危険性が高い「積載物」を積載している船舶の優先度を高く設定する。
【0039】
また、本発明は、上述した実施形態に限定されず、本発明の範囲において多様な実施形態の構成が可能であり、構成要素の全てまたは一部に如何なる改良が施されてもよい。
【0040】
以下、本願に開示された発明を整理し、「特許請求の範囲」および「課題を解決するための手段」の欄の記載に準じた様式により列記する。
【0041】
[請求項1] 目標が位置する領域を識別する領域識別手段と、
レーダが受信した受信波で示される目標の内、前記領域に位置する目標を一本化し、1つの目標として検出する目標検出手段と
を備えたことを特徴とする疑似目標除去装置。
このような構成の疑似目標除去装置では、領域識別手段は、目標が位置する領域を識別する。目標検出手段は、レーダが受信した受信波で示される目標の内、前記領域に位置する目標を一本化し、1つの目標として検出する。
すなわち、共通の目標で生じた複数の反射波に対応して個別に識別され得る目標は、その共通の目標が位置する領域内で生じた反射波の何れか1つに対応する1つの目標に一本化されて識別される。
したがって、大きな目標であっても、その目標の形状、姿勢および状態の如何にかかわらず、精度よく安定に1つの目標として識別される。
【0042】
[請求項2] 請求項1に記載の疑似目標除去装置において、
前記領域識別手段は、
前記1つの目標によって間欠的に通知された前記1つの目標の寸法に基づいて前記領域を識別する
ことを特徴とする疑似目標除去装置。
このような構成の疑似目標除去装置では、請求項1に記載の疑似目標除去装置において、前記領域識別手段は、前記1つの目標によって間欠的に通知された前記1つの目標の寸法に基づいて前記領域を識別する。
すなわち、実質的な1つの目標が占める領域は、その1つの目標の寸法に基づいて精度よく識別される。
したがって、このような実質的な1つの目標が実体とは異なる複数の目標として識別され難くなる。
【0043】
[請求項3] 請求項1に記載の疑似目標除去装置において、
前記領域識別手段は、
前記1つの目標によって間欠的に通知された前記1つの目標の姿勢および寸法に基づいて前記領域を識別する
ことを特徴とする疑似目標除去装置。
このような構成の疑似目標除去装置では、請求項1に記載の疑似目標除去装置において、前記領域識別手段は、前記1つの目標によって間欠的に通知された前記1つの目標の姿勢および寸法に基づいて前記領域を識別する。
すなわち、実質的な1つの目標が占める領域は、その1つの目標の寸法だけではなく、姿勢にも基づいて精度よく識別される。
したがって、このような実質的な1つの目標は、反射体としての形状や寸法が上記姿勢に応じて変化する場合であっても、実体とは異なる複数の目標として識別され難くなる。
【0044】
[請求項4] 請求項1に記載の疑似目標除去装置において、
前記領域識別手段は、
前記1つの目標によって間欠的に通知された前記1つの目標の姿勢、形状および寸法に基づいて前記領域を識別する
ことを特徴とする疑似目標除去装置。
このような構成の疑似目標除去装置では、請求項1に記載の疑似目標除去装置において、前記領域識別手段は、前記1つの目標によって間欠的に通知された前記1つの目標の姿勢、形状および寸法に基づいて前記領域を識別する。
すなわち、実質的な1つの目標が占める領域は、その1つの目標の姿勢および寸法だけではなく、形状にも基づいて精度よく識別される。
したがって、このような実質的な1つの目標は、形状が複雑であっても、実体とは異なる複数の目標として識別され難くなる。
【0045】
[請求項5] 請求項1に記載の疑似目標除去装置において、
前記領域識別手段は、
前記レーダに対する応答として前記1つの目標から通知された前記1つの目標の寸法に基づいて前記領域を識別する
ことを特徴とする疑似目標除去装置。
このような構成の疑似目標除去装置では、請求項1に記載の疑似目標除去装置において、前記領域識別手段は、前記レーダに対する応答として前記1つの目標から通知された前記1つの目標の寸法に基づいて前記領域を識別する。
すなわち、実質的な1つの目標が占める領域は、その1つの目標の寸法に基づいて精度よく識別される。
したがって、このような実質的な1つの目標が実体とは異なる複数の目標として識別され難くなる。
【0046】
[請求項6] 請求項1に記載の疑似目標除去装置において、
前記領域識別手段は、
前記レーダに対する応答として前記1つの目標から通知された前記1つの目標の姿勢および寸法に基づいて前記領域を識別する
ことを特徴とする疑似目標除去装置。
このような構成の疑似目標除去装置では、請求項1に記載の疑似目標除去装置において、前記領域識別手段は、前記レーダに対する応答として前記1つの目標から通知された前記1つの目標の姿勢および寸法に基づいて前記領域を識別する。
すなわち、実質的な1つの目標が占める領域は、その1つの目標の寸法だけではなく、姿勢にも基づいて精度よく識別される。
したがって、このような実質的な1つの目標は、反射体としての形状や寸法が上記姿勢に応じて変化する場合であっても、実体とは異なる複数の目標として識別され難くなる。
【0047】
[請求項7] 請求項1に記載の疑似目標除去装置において、
前記領域識別手段は、
前記レーダに対する応答として前記1つの目標から通知された前記1つの目標の姿勢、形状および寸法に基づいて前記領域を識別する
ことを特徴とする疑似目標除去装置。
このような構成の疑似目標除去装置では、請求項1に記載の疑似目標除去装置において、前記領域識別手段は、前記レーダに対する応答として前記1つの目標から通知された前記1つの目標の姿勢、形状および寸法に基づいて前記領域を識別する。
すなわち、実質的な1つの目標が占める領域は、その1つの目標の姿勢および寸法だけではなく、形状にも基づいて精度よく識別される。
したがって、このような実質的な1つの目標は、形状が複雑であっても、実体とは異なる複数の目標として識別され難くなる。
【0048】
[請求項8] 請求項1に記載の疑似目標除去装置において、
前記領域識別手段は、
前記レーダに対する応答として前記1つの目標から通知された識別情報に対応してデータベースに登録されている前記1つの目標の寸法を取得し、前記寸法に基づいて前記領域を識別する
ことを特徴とする疑似目標除去装置。
このような構成の疑似目標除去装置では、請求項1に記載の疑似目標除去装置において、前記領域識別手段は、前記レーダに対する応答として前記1つの目標から通知された識別情報に対応してデータベースに登録されている前記1つの目標の寸法を取得し、前記寸法に基づいて前記領域を識別する。
すなわち、実質的な1つの目標が占める領域は、その1つの目標の寸法に基づいて精度よく識別される。
したがって、このような実質的な1つの目標が実体とは異なる複数の目標として識別され難くなる。
【0049】
[請求項9] 請求項1に記載の疑似目標除去装置において、
前記領域識別手段は、
前記レーダに対する応答として前記1つの目標から通知された識別情報に対応してデータベースに登録されている前記1つの目標の姿勢および寸法を取得し、前記姿勢および寸法に基づいて前記領域を識別する
ことを特徴とする疑似目標除去装置。
このような構成の疑似目標除去装置では、請求項1に記載の疑似目標除去装置において、前記領域識別手段は、前記レーダに対する応答として前記1つの目標から通知された識別情報に対応してデータベースに登録されている前記1つの目標の姿勢および寸法を取得し、前記姿勢および寸法に基づいて前記領域を識別する。
すなわち、実質的な1つの目標が占める領域は、その1つの目標の寸法だけではなく、姿勢にも基づいて精度よく識別される。
したがって、このような実質的な1つの目標は、反射体としての形状や寸法が上記姿勢に応じて変化する場合であっても、実体とは異なる複数の目標として識別され難くなる。
【0050】
[請求項10] 請求項1に記載の疑似目標除去装置において、
前記領域識別手段は、
前記レーダに対する応答として前記1つの目標から通知された識別情報に対応してデータベースに登録されている前記1つの目標の姿勢、形状および寸法を取得し、前記姿勢、形状および寸法に基づいて前記領域を識別する
ことを特徴とする疑似目標除去装置。
このような構成の疑似目標除去装置では、請求項1に記載の疑似目標除去装置において、前記領域識別手段は、前記レーダに対する応答として前記1つの目標から通知された識別情報に対応してデータベースに登録されている前記1つの目標の姿勢、形状および寸法を取得し、前記姿勢、形状および寸法に基づいて前記領域を識別する。
すなわち、実質的な1つの目標が占める領域は、その1つの目標の姿勢および寸法だけではなく、形状にも基づいて精度よく識別される。
したがって、このような実質的な1つの目標は、形状が複雑であっても、実体とは異なる複数の目標として識別され難くなる。
【0051】
[請求項11] 請求項1ないし請求項10の何れか1項に記載の疑似目標除去装置において、
前記目標検出手段は、
前記領域の重心として前記1つの目標の位置を特定する
ことを特徴とする疑似目標除去装置。
このような構成の疑似目標除去装置では、請求項1ないし請求項10の何れか1項に記載の疑似目標除去装置において、前記目標検出手段は、前記領域の重心として前記1つの目標の位置を特定する。
すなわち、複数の反射波の源となった目標の位置は、その目標の姿勢、形状、寸法が一定でなくても、精度よく安定に特定される。
したがって、多様な目標の測位が精度よく実現される。
【0052】
[請求項12] 請求項1ないし請求項10の何れか1項に記載の疑似目標除去装置において、
前記目標検出手段は、
前記領域に位置する目標の内、サイズが最大である目標を前記1つの目標として検出する
ことを特徴とする疑似目標除去装置。
このような構成の疑似目標除去装置では、請求項1ないし請求項10の何れか1項に記載の疑似目標除去装置において、前記目標検出手段は、前記領域に位置する目標の内、サイズが最大である目標を前記1つの目標として検出する。
すなわち、複数の反射波の源となった目標の位置は、その目標の姿勢、形状、寸法が一定でなくても、上記反射波が生じる最大の反射体の位置として特定される。
したがって、多様な目標の測位が精度よく実現される。
【0053】
[請求項13] 請求項1ないし請求項10の何れか1項に記載の疑似目標除去装置において、
前記目標検出手段は、
前記領域に位置する目標の内、前記受信波のレベルが最大である目標を前記1つの目標として検出する
ことを特徴とする疑似目標除去装置。
このような構成の疑似目標除去装置では、請求項1ないし請求項10の何れか1項に記載の疑似目標除去装置において、前記目標検出手段は、前記領域に位置する目標の内、前記受信波のレベルが最大である目標を前記1つの目標として検出する。
すなわち、複数の反射波の源となった目標の位置は、その目標の姿勢、形状、寸法が一定でなくても、上記反射波が生じる最大の反射体の位置として特定される。
したがって、多様な目標の測位が精度よく実現される。
【0054】
[請求項14] 請求項1ないし請求項13の何れか1項に記載の疑似目標除去装置において、
前記領域識別手段は、
前記1つの目標によって通知された前記1つの目標の種類を取得し、前記1つの目標の一本化に必要な処理の優先度を前記種類に応じて設定する
ことを特徴とする疑似目標除去装置。
このような構成の疑似目標除去装置では、請求項1ないし請求項13の何れか1項に記載の疑似目標除去装置において、前記領域識別手段は、前記1つの目標によって通知された前記1つの目標の種類を取得し、前記1つの目標の一本化に必要な処理の優先度を前記種類に応じて設定する。
すなわち、既述の一本化の処理は、その処理の必要性が目標の種類に基づく識別の下で他の目標より優先的にあるいは非優先的に行われる。
したがって、本発明の適用のために確保されるべき処理量が無用に大きくなり、あるいは応答性が過度に低下することが回避される。
【0055】
[請求項15] 請求項1ないし請求項13の何れか1項に記載の疑似目標除去装置において、
前記領域識別手段は、
前記1つの目標によって通知された前記1つの目標の進路を取得し、前記進路と前記疑似目標除去装置が搭載された移動体の進路との相関性に応じて、前記1つの目標の一本化に必要な処理の優先度を設定する
ことを特徴とする疑似目標除去装置。
このような構成の疑似目標除去装置では、請求項1ないし請求項13の何れか1項に記載の疑似目標除去装置において、前記領域識別手段は、前記1つの目標によって通知された前記1つの目標の進路を取得し、前記進路と前記疑似目標除去装置が搭載された移動体の進路との相関性に応じて、前記1つの目標の一本化に必要な処理の優先度を設定する。
すなわち、既述の一本化の処理は、本発明が適用された移動体との進路の相関性に基づいて他の目標より優先的にあるいは非優先的に行われる。
したがって、本発明の適用のために確保されるべき処理量が無用に大きくなり、あるいは応答性が過度に低下することが回避される。
【0056】
[請求項16] 請求項1ないし請求項13の何れか1項に記載の疑似目標除去装置において、
前記領域識別手段は、
前記1つの目標によって通知された前記1つの目標の速度を取得し、前記1つの目標への一本化に必要な処理の優先度を前記速度に応じて設定する
ことを特徴とする疑似目標除去装置。
このような構成の疑似目標除去装置では、請求項1ないし請求項13の何れか1項に記載の疑似目標除去装置において、前記領域識別手段は、前記1つの目標によって通知された前記1つの目標の速度を取得し、前記1つの目標への一本化に必要な処理の優先度を前記速度に応じて設定する。
すなわち、既述の一本化の処理は、目標毎の速度に基づいて他の目標より優先的にあるいは非優先的に行われる。
したがって、本発明の適用のために確保されるべき処理量が無用に大きくなり、あるいは応答性が過度に低下することが回避される。
【0057】
[請求項17] 請求項1ないし請求項13の何れか1項に記載の疑似目標除去装置において、
前記領域識別手段は、
前記1つの目標によって通知された前記1つの目標の状態を取得し、前記1つの目標への一本化に必要な処理の優先度を前記状態に応じて設定する
ことを特徴とする疑似目標除去装置。
このような構成の疑似目標除去装置では、請求項1ないし請求項13の何れか1項に記載の疑似目標除去装置において、前記領域識別手段は、前記1つの目標によって通知された前記1つの目標の状態を取得し、前記1つの目標への一本化に必要な処理の優先度を前記状態に応じて設定する。
すなわち、既述の一本化の処理は、目標毎の状態に基づいて他の目標より優先的にあるいは非優先的に行われる。
したがって、本発明の適用のために確保されるべき処理量が無用に大きくなり、あるいは応答性が過度に低下することが回避される。
【0058】
[請求項18] 請求項1ないし請求項13の何れか1項に記載の疑似目標除去装置において、
前記領域識別手段は、
前記1つの目標によって通知された前記1つの目標の積載物を取得し、前記1つの目標への一本化に必要な処理の優先度を前記積載物の属性に応じて設定する
ことを特徴とする疑似目標除去装置。
このような構成の疑似目標除去装置では、請求項1ないし請求項13の何れか1項に記載の疑似目標除去装置において、前記領域識別手段は、前記1つの目標によって通知された前記1つの目標の積載物を取得し、前記1つの目標への一本化に必要な処理の優先度を前記積載物の属性に応じて設定する。
すなわち、既述の一本化の処理は、目標毎の積載物の属性に基づいて他の目標より優先的にあるいは非優先的に行われる。
したがって、本発明の適用のために確保されるべき処理量が無用に大きくなり、あるいは応答性が過度に低下することが回避される。
【0059】
[請求項19] レーダが受信した受信波で示される個々の目標の位置を求める測位手段と、
前記個々の目標の位置に対応してデータベースに登録されている目標を一本化し、1つの目標として検出する目標検出手段と
を備えたことを特徴とする疑似目標除去装置。
このような構成の疑似目標除去装置では、測位手段は、レーダが受信した受信波で示される個々の目標の位置を求める。目標検出手段は、前記個々の目標の位置に対応してデータベースに登録されている目標を一本化し、1つの目標として検出する。
すなわち、共通の目標で生じた複数の反射波に対応して個別に識別され得る目標は、その共通の目標が位置する領域内で生じた反射波の何れか1つに対応する1つの目標に一本化されて識別される。
したがって、大きな目標であっても、その目標の形状、姿勢および状態の如何にかかわらず、精度よく安定に1つの目標として識別される。
【0060】
[請求項20] 請求項19に記載の疑似目標除去装置において、
前記目標検出手段は、
前記レーダが受信した受信波で示される個々の目標に最寄りの目標の寸法をデータベースより取得し、前記最寄りの目標の寸法に基づいて前記領域を識別する
ことを特徴とする疑似目標除去装置。
このような構成の疑似目標除去装置では、請求項19に記載の疑似目標除去装置において、前記目標検出手段は、前記レーダが受信した受信波で示される個々の目標に最寄りの目標の寸法をデータベースより取得し、前記最寄りの目標の寸法に基づいて前記領域を識別する。
すなわち、実質的な1つの目標が占める領域は、その1つの目標の寸法に基づいて精度よく識別される。
したがって、このような実質的な1つの目標が実体とは異なる複数の目標として識別され難くなる。
【0061】
[請求項21] 請求項19に記載の疑似目標除去装置において、
前記目標検出手段は、
前記レーダが受信した受信波で示される個々の目標に最寄りの目標の姿勢および寸法をデータベースより取得し、前記最寄りの目標の姿勢および寸法に基づいて前記領域を識別する
ことを特徴とする疑似目標除去装置。
このような構成の疑似目標除去装置では、請求項19に記載の疑似目標除去装置において、前記目標検出手段は、前記レーダが受信した受信波で示される個々の目標に最寄りの目標の姿勢および寸法をデータベースより取得し、前記最寄りの目標の姿勢および寸法に基づいて前記領域を識別する。
すなわち、実質的な1つの目標が占める領域は、その1つの目標の寸法だけではなく、姿勢にも基づいて精度よく識別される。
したがって、このような実質的な1つの目標は、反射体としての形状や寸法が上記姿勢に応じて変化する場合であっても、実体とは異なる複数の目標として識別され難くなる。
【0062】
[請求項22] 請求項19に記載の疑似目標除去装置において、
前記目標検出手段は、
前記レーダが受信した受信波で示される個々の目標の位置に最寄りの目標の姿勢、形状および寸法をデータベースより取得し、前記最寄りの目標の姿勢、形状および寸法に基づいて前記領域を識別する
ことを特徴とする疑似目標除去装置。
このような構成の疑似目標除去装置では、請求項19に記載の疑似目標除去装置において、前記目標検出手段は、前記レーダが受信した受信波で示される個々の目標の位置に最寄りの目標の姿勢、形状および寸法をデータベースより取得し、前記最寄りの目標の姿勢、形状および寸法に基づいて前記領域を識別する。
すなわち、実質的な1つの目標が占める領域は、その1つの目標の姿勢および寸法だけではなく、形状にも基づいて精度よく識別される。
したがって、このような実質的な1つの目標は、形状が複雑であっても、実体とは異なる複数の目標として識別され難くなる。
【0063】
[請求項23] 請求項19ないし請求項22の何れか1項に記載の疑似目標除去装置において、
前記目標検出手段は、
前記1つの目標の寸法に併せて、前記1つの目標の種類を前記データベースより取得し、前記1つの目標への一本化に必要な処理の優先度を前記1つの目標の種類に応じて設定する
ことを特徴とする疑似目標除去装置。
このような構成の疑似目標除去装置では、請求項19ないし請求項22の何れか1項に記載の疑似目標除去装置において、前記目標検出手段は、前記1つの目標の寸法に併せて、前記1つの目標の種類を前記データベースより取得し、前記1つの目標への一本化に必要な処理の優先度を前記1つの目標の種類に応じて設定する。
すなわち、既述の一本化の処理は、その処理の必要性が目標の種類に基づく識別の下で他の目標より優先的にあるいは非優先的に行われる。
したがって、本発明の適用のために確保されるべき処理量が無用に大きくなり、あるいは応答性が過度に低下することが回避される。
【0064】
[請求項24] 請求項19ないし請求項22の何れか1項に記載の疑似目標除去装置において、
前記目標検出手段は、
前記1つの目標の寸法に併せて、前記1つの目標の進路を前記データベースより取得し、前記進路と前記疑似目標除去装置が搭載された移動体の進路との相関性に応じて、前記1つの目標への一本化に必要な処理の優先度を設定する
ことを特徴とする疑似目標除去装置。
このような構成の疑似目標除去装置では、請求項19ないし請求項22の何れか1項に記載の疑似目標除去装置において、前記目標検出手段は、前記1つの目標の寸法に併せて、前記1つの目標の進路を前記データベースより取得し、前記進路と前記疑似目標除去装置が搭載された移動体の進路との相関性に応じて、前記1つの目標への一本化に必要な処理の優先度を設定する。
すなわち、既述の一本化の処理は、本発明が適用された移動体との進路の相関性に基づいて他の目標より優先的にあるいは非優先的に行われる。
したがって、本発明の適用のために確保されるべき処理量が無用に大きくなり、あるいは応答性が過度に低下することが回避される。
【0065】
[請求項25] 請求項19ないし請求項22の何れか1項に記載の疑似目標除去装置において、
前記目標検出手段は、
前記1つの目標の寸法に併せて、前記1つの目標の速度を前記データベースより取得し、前記1つの目標への一本化に必要な処理の優先度を前記1つの目標の速度に応じて設定する
ことを特徴とする疑似目標除去装置。
このような構成の疑似目標除去装置では、請求項19ないし請求項22の何れか1項に記載の疑似目標除去装置において、前記目標検出手段は、前記1つの目標の寸法に併せて、前記1つの目標の速度を前記データベースより取得し、前記1つの目標への一本化に必要な処理の優先度を前記1つの目標の速度に応じて設定する。
すなわち、既述の一本化の処理は、目標毎の速度に基づいて他の目標より優先的にあるいは非優先的に行われる。
したがって、本発明の実現のために確保されるべき処理量が無用に大きくなり、あるいは応答性が過度に低下することが回避される。
【0066】
[請求項26] 請求項19ないし請求項22の何れか1項に記載の疑似目標除去装置において、
前記目標検出手段は、
前記1つの目標の寸法に併せて、前記1つの目標の状態を前記データベースより取得し、前記1つの目標への一本化に必要な処理の優先度を前記1つの目標の状態に応じて設定する
ことを特徴とする疑似目標除去装置。
このような構成の疑似目標除去装置では、請求項19ないし請求項22の何れか1項に記載の疑似目標除去装置において、前記目標検出手段は、前記1つの目標の寸法に併せて、前記1つの目標の状態を前記データベースより取得し、前記1つの目標への一本化に必要な処理の優先度を前記1つの目標の状態に応じて設定する。
すなわち、既述の一本化の処理は、目標毎の状態に基づいて他の目標より優先的にあるいは非優先的に行われる。
したがって、本発明の適用のために確保されるべき処理量が無用に大きくなり、あるいは応答性が過度に低下することが回避される。
【0067】
[請求項27] 請求項19ないし請求項22の何れか1項に記載の疑似目標除去装置において、
前記目標検出手段は、
前記1つの目標の寸法に併せて、前記1つの目標の積載物を前記データベースより取得し、前記1つの目標への一本化に必要な処理の優先度を前記積載物の属性に応じて設定する
このような構成の疑似目標除去装置では、請求項19ないし請求項22の何れか1項に記載の疑似目標除去装置において、前記目標検出手段は、前記1つの目標の寸法に併せて、前記1つの目標の積載物を前記データベースより取得し、前記1つの目標への一本化に必要な処理の優先度を前記積載物の属性に応じて設定する。
すなわち、既述の一本化の処理は、目標毎の積載物の属性に基づいて他の目標より優先的にあるいは非優先的に行われる。
したがって、本発明の適用のために確保されるべき処理量が無用に大きくなり、あるいは応答性が過度に低下することが回避される。
【0068】
[請求項28] 移動体の位置を特定する測位手段と、
無線伝送路を介して外部に前記移動体の位置およびサイズを報知する報知手段と
を備えた移動体自動識別装置において、
前記報知手段は、
前記移動体の位置およびサイズに併せて、前記移動体の形状を前記無線伝送路を介して外部に報知する
ことを特徴とする移動体自動識別装置。
このような構成の移動体自動識別装置では、測位手段は、移動体の位置を特定する。報知手段は、前記移動体の位置およびサイズに併せて、前記移動体の形状を前記無線伝送路を介して外部に報知する。
すなわち、本発明に係る移動体自動識別装置が備えられた移動体は、測距や測位がその移動体の位置およびサイズだけではなく、形状にも基づいて精度よく実現可能となる。
したがって、本発明に係る移動体自動識別装置が備えられた移動体は、形状が複雑であっても、実体とは異なる複数の目標として識別され難くなる。
【0069】
[請求項29] 請求項28に記載の移動体自動識別装置において、
前記報知手段は、
前記無線伝送路を介して外部から与えられた要求に応じて、前記移動体の位置およびサイズに併せて、前記移動体の形状を前記無線伝送路を介して外部に報知する
ことを特徴とする移動体自動識別装置。
このような構成の移動体自動識別装置では、請求項28に記載の移動体自動識別装置において、前記報知手段は、前記無線伝送路を介して外部から与えられた要求に応じて、前記移動体の位置およびサイズに併せて、前記移動体の形状を前記無線伝送路を介して外部に報知する。
すなわち、本発明に係る移動体自動識別装置が備えられた移動体は、測距や測位がその移動体の位置およびサイズだけではなく、形状にも基づいて精度よく実現可能となる。
したがって、本発明に係る移動体自動識別装置が備えられた移動体は、形状が複雑であっても、実体とは異なる複数の目標として識別され難くなる。
【符号の説明】
【0070】
10 船舶レーダ
11,24 目標検出部
12,14 AISトランスポンダ
13 目標船舶
21 空中線
22 送受信部
23 信号処理部
25 追尾処理部
【技術分野】
【0001】
本発明は、目標からレーダに到来した受信波を処理し、実質的に同じ目標による重複した反射に起因して識別される複数の目標を一本化する疑似目標除去装置と、搭載された移動体の識別情報に併せて上記一本化の拠り所となる情報を無線伝送路を介して外部に通知する移動体自動識別装置とに関する。
【背景技術】
【0002】
近年、船舶等の移動体には、高度に進展した航法、電子技術および情報処理技術が適用され、運行等に関連する安全性の確保や省力化に併せて、環境対策およびコストの削減が多様に図られつつある。
従来の船舶レーダは、図4に示すように、以下の要素から構成される。
(1) 空中線21
(2) 目標が位置し得る方向およびレンジの範囲に、空中線21を介して所定の送信波を送信し、その送信波が目標で反射することに生じた受信波を空中線21を介して受信する送受信部22
(3) 送受信部22によって上記受信波が復調されることによって生成されたビデオ信号に海面反射の除去等の信号処理を施す信号処理部23
(4) 信号処理部23が上記信号処理の結果として出力するディジタル信号から個々の目標を検出し、これらの目標の位置情報を出力する目標検出部24
(5) 目標検出部24によって出力された位置情報に基づいて、PPI(Plan Position Indicator)スコープ上の所望のレンジ内に位置する目標を追尾する追尾処理部25
なお、本発明に関連する先行技術としては、以下に列記されるものがある。
(1) レーダセンサを用いて目標を追尾するために、ビデオ信号を2値化してターゲットテーブルを生成し、そのターゲットテーブルに形成されるエッジを検出すると共に、検出されたエッジに基づいて検出される目標の機影から目標の重心を求め、その機影から抽出される目標の機首の動きに基づいて目標の旋回状態を判定する点に特徴がある「目標追尾装置」および「目標追尾方法」
(2) 複数の目標をグループ化して追尾し、かつグループ情報と追尾情報とを比較することによって追尾対象毎に適切な情報を選択すると共に、適切なトラックデータを作成する点に特徴がある「レーダ追尾装置」
(3) 部分領域毎に観測時刻における目標の航跡を予測し、予測値に基づいて航跡のゲートを算出すると共に、全領域の観測が終了するまで、部分領域毎の観測時刻に併せてゲート判定した結果をゲート内判定行列に反映させ、全領域の観測が終了した場合に、現サンプリング区間に対応させる仮説および航跡の更新処理を実行することにより、観測領域内の観測値が同一時刻に得られない場合にも、精度のよい追尾を可能とする点に特徴がある「目標追尾装置」
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開平11−304915号公報
【特許文献2】特開2003−248057号公報
【特許文献3】特開2004−233136号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、上述した従来の船舶レーダでは、遠距離に位置する巨大船舶から到来する反射波は、その巨大船舶の船首の向きによっては、図5(a),(b)に示すように、甲板上にあるマスト等の複数の反射体によって個別に発生する。
したがって、このような巨大船舶は、物理的には単一であるにもかかわらず、船舶レーダのPPIスコープ上では、図6に示すように、複数の目標として識別される場合があった。
【0005】
また、このような現象は、特に、錨泊地に投錨し、かつ船首方向が潮の流れに応じて絶え間なく変化する巨大船舶で頻繁に発生する場合が多かった。
しかし、このような現象が発生すると、追尾処理部25は、追尾処理の過程では、船首の向きに応じて、単一の船舶が異なる複数の船舶と識別し、あるいは単一の船舶と識別する。
したがって、追尾処理の精度が頻繁に劣化し、観測者がPPIスコープ上で誤った認識を行う可能性があった。
【0006】
なお、上記反射波が生じる船舶にAISトランスポンダが搭載されている場合には、そのAISトランスポンダによって得られた情報と、既述の追尾処理の結果として得られた情報とが重複して表示されることを防止するために、これらの情報の統合が図られる場合がある。
【0007】
しかし、このような情報の統合は、AISトランスポンダによって得られた情報との統合が追尾処理の対象となる目標毎に行われる。
したがって、単一の船舶であっても複数の目標として表示され、観測者が誤った認識を行う可能性は解消されなかった。
【0008】
本発明は、ハードウェアの構成が大幅に変更されることなく目標の識別精度を高め、かつ安定に維持できる疑似目標除去装置および移動体自動識別装置を提供することを目的とする。
【課題を解決するための手段】
【0009】
請求項1に記載の発明では、領域識別手段は、目標が位置する領域を識別する。目標検出手段は、レーダが受信した受信波で示される目標の内、前記領域に位置する目標を一本化し、1つの目標として検出する。
すなわち、共通の目標で生じた複数の反射波に対応して個別に識別され得る目標は、その共通の目標が位置する領域内で生じた反射波の何れか1つに対応する1つの目標に一本化されて識別される。
【0010】
請求項2に記載の発明では、測位手段は、レーダが受信した受信波で示される個々の目標の位置を求める。目標検出手段は、前記個々の目標の位置に対応してデータベースに登録されている目標を一本化し、1つの目標として検出する。
すなわち、共通の目標で生じた複数の反射波に対応して個別に識別され得る目標は、その共通の目標が位置する領域内で生じた反射波の何れか1つに対応する1つの目標に一本化されて識別される。
【0011】
請求項3に記載の発明では、測位手段は、移動体の位置を特定する。報知手段は、前記移動体の位置およびサイズに併せて、前記移動体の形状を前記無線伝送路を介して外部に報知する。
すなわち、本発明に係る移動体自動識別装置が備えられた移動体は、測距や測位がその移動体の位置およびサイズだけではなく、形状にも基づいて精度よく実現可能となる。
【発明の効果】
【0012】
本発明によれば、大きな目標であっても、その目標の形状、姿勢および状態の如何にかかわらず、精度よく安定に1つの目標として識別される。
本発明では、目標は、反射体としての形状や寸法がその目標の姿勢に応じて変化し、あるいは形状が複雑である場合であっても、実体とは異なる複数の目標として識別され難くなる。
【0013】
本発明によれば、多様な目標の測位が精度よく実現される。
本発明によれば、確保されるべき処理量が無用に大きくなり、あるいは応答性が過度に低下することが回避される。
本発明に係る移動体自動識別装置が備えられた移動体は、形状が複雑であっても、実体とは異なる複数の目標として識別され難くなる。
【0014】
したがって、本発明が適用された移動体は、形状、寸法、姿勢、速度、種類、進路、状態、積載物の如何にかかわらず、他の移動体との相互の測距や測位を精度よく行うことができ、かつ運行や移動の安全性が高められると共に、高く維持される。
【図面の簡単な説明】
【0015】
【図1】本発明の一実施形態を示す図である。
【図2】本実施形態の動作フローチャートである。
【図3】本実施形態の動作を説明する図である。
【図4】従来の船舶レーダの構成例を示す図である。
【図5】甲板上にある複数の反射体によって反射波が個別に発生するメカニズムを示す図である。
【図6】PPIスコープ上に表示される複数の目標を示す図である。
【発明を実施するための形態】
【0016】
以下、図面に基づいて本発明の実施形態について詳細に説明する。
図1は、本発明の一実施形態を示す図である。
図において、図4に示すものと機能が同じものについては、図4と同じ符号を付与して示し、ここでは、説明を省略する。
【0017】
本実施形態と図4に示す従来例との構成の相違点は、以下の点にある。
(1) 本実施形態に係る船舶レーダ10は、目標検出部24に代えて目標検出部11が備えられ、その目標検出部11のモニタ入力にAISトランスポンダ12の出力が接続されることによって構成される。
【0018】
(2) 船舶レーダ10が搭載された船舶(以下、「自船舶」という。)とは異なる船舶であって、既述の大型船舶に該当する船舶(以下、「目標船舶」という。)13には、構成および機能が上記AISトランスポンダ12と同じであるAISトランスポンダ14が備えられる。
【0019】
図2は、本実施形態の動作フローチャートである。
図3は、本実施形態の動作を説明する図である。
以下、図1〜図3を参照して本実施形態の動作を説明する。
【0020】
目標船舶13に備えられたAISトランスポンダ14は、通常のAISトランスポンダとは異なり、例えば、以下の項目に併せて、所定の無線回線を介して所定の頻度で他の船舶や海岸局宛に目標船舶13の「形状」を示す情報を通知する。
【0021】
(A) 船首方位θ、船位、センサ位置、船体長L、船幅W、船種、航海の状態、積載物、対地進路、対地船速、目的地
(B) 船名、MMSI(Maritime Mobile Service Identity)番号、IMO(International Maritime Organization)番号、呼び出し符号、UTC(Coordinated
Universal Time)、回頭角速度、喫水
【0022】
なお、上記目標船舶13の形状を示す情報については、以下では、その形状を多角形で近似されることと仮定し、「ポリゴンデータ」と称する。
また、上記(B) に列記される項目については、本実施例では、本発明の特徴とは密接な関係がないため、以下では、詳細な説明を省略する。
【0023】
さらに、以下では、目標船舶が追尾の対象となる程度の船速で航行していることを前提とし、AISトランスポンダ14が上記項目および「ポリゴンデータ」を他の船舶や海岸局宛に通知する周期については、例えば、「2秒」であると仮定する。
また、上記「センサ位置」は、図3に示すように、船位の計測に供されるGPSアンテナが設置された目標船舶13上の位置(以下、「基準点」という。)Pを基準として予め設定された以下の4つの距離の組み合わせとして与えられる。
【0024】
(1) 基準点Pから左舷側までの距離xl
(2) 基準点Pから右舷側までの距離xr
(3) 基準点Pから船首までの距離yb
(4) 基準点Pから船首までの距離ys
【0025】
一方、船舶レーダ10では、空中線21、送受信部22および信号処理部23は、従来例と同様に連係することにより、自船舶の周囲に位置する船舶(目標船舶13を含む。)の測位および測距の処理を行い、その処理の結果としてディジタル信号を出力する。
なお、以下では、空中線21を介して行われるスキャンの周期は、例えば、上記「2秒」の周期と大幅には異ならない「3秒」であると仮定する。
【0026】
本発明の特徴は、本実施形態では、目標検出部11がAISトランスポンダ12と連係して行う以下の処理にある。
AISトランスポンダ12は、目標船舶13に備えられたAISトランスポンダ14から無線伝送された船首方位θ、船位、センサ位置、船体長L、船幅W、船種、航海の状態、積載物、対地進路、対地船速、目的地およびポリゴンデータを取得する。
【0027】
目標検出部11は、これらの船首方位θ、船位、センサ位置、船体長L、船幅W、船種、航海の状態、積載物、対地進路、対地船速、目的地およびポリゴンデータに基づいて以下の処理を行う。
(1) 地図(海図)上における目標船舶13の位置Pを図3に示すように上記船位に基づいて荒く特定する(図2ステップS1)。
(2) この船位に併せて、既述の船首方位θ、センサ位置(xl、xr、yb、ys)、船体長Lおよび船幅Wに基づいて、図3のハンチング部に示すように、目標船舶13が地図(海図)上で占有する領域を特定する(図2ステップS2)。
【0028】
(3) 上記ディジタル信号で示される目標の内、このような領域上に位置する目標であってPPIスコープ上でのサイズが最大であると認められる目標(以下、「主目標」という。)を特定する(図2ステップS3)。
(4) このような主目標以外の目標を廃棄する(図2ステップ4)。
(5) 主目標の位置を示す位置情報を追尾処理部25に引き渡す(図2ステップ5)。
【0029】
すなわち、追尾処理部25は、目標船舶13の甲板上にあるマスト等の複数の反射体から空中線21に反射波が個別に到来しても、その目標船舶13の主要な反射体から到来した1つの反射波で特定される位置情報に基づいて、PPIスコープ上に表示されるべき目標の追尾を行うことができる。
したがって、本実施形態によれば、観測者が上記PPIスコープ上で誤った認識を行う可能性が確度高く排除され、かつ追尾処理の精度が安定に高く維持される。
【0030】
なお、本実施形態では、目標船舶13の船首方位θ、船位、センサ位置、船体長L、船幅WおよびポリゴンデータがAISトランスポンダ14によって通知されている。しかし、これらの船首方位θ、船位、センサ位置、船体長L、船幅Wおよびポリゴンデータは、以下のどのような形態で自船舶の目標検出部11に与えられてもよい。
【0031】
(1) AISトランスポンダ14に代わる多様な航行援助装置あるいは航行援助システム
(2) 目標船舶13に搭載され、自船舶の空中線21から到来した送信波に応答するトランスポンダ
(3) 自船舶との間に形成された何らかの通信手段を介してアクセスが可能であり、かつ目標船舶13から通知されたMMSI番号等のユニークな識別情報に基づいて検索することが可能であるデータベース
【0032】
また、本発明は、既述の船舶用レーダに限定されず、航空機や車両等の様々な移動体の測位や測距を安定に精度よく実現するための多様なレーダにも同様に適用可能である。
さらに、本実施形態では、船首方位θ、船位、センサ位置(xl、xr、yb、ys)、船体長L、船幅Wおよびポリゴンデータに基づいて、地図(海図)上で目標船舶13が占有する領域が特定されている。しかし、このような領域は、目標船舶の形状が正方形、矩形、円形等と見なすことができ、あるいは精度の低下が許容される場合には、以下の組み合わせ(1)、(2)の何れかに基づいて求められてもよい。
【0033】
(1) 船位、船首方位θ、船体長L、船幅W
(2) 船位、船体長L、船幅W
また、このような領域の特定は、近距離では、二次元の直行座標系に基づいて特定可能であるが、例えば、球面座標系その他の多様な三次元の座標系に基づいて特定されてもよい。
【0034】
さらに、既述の主目標は、「領域上に位置する目標であってPPIスコープ上でのサイズが最大である目標」でなくてもよく、例えば、ディジタル信号で示される目標の内、「空中線21に到来した受信波の電力の総和が最大である目標」であってもよく、「ラベリングシステムが適用されることによって特定される上記領域の重心に位置する(と見なすことが可能である)目標」であってもよい。
【0035】
また、本実施形態では、既述の領域の特定および主目標の特定を実現する処理は、目標の属性の如何にかかわらず行われている。しかし、このような処理の優先度が以下の通りに設定されることにより、必要な処理量や消費電力の削減、あるいは応答性の向上が図られてもよい。
【0036】
(1) 主目標の選択の必要性がない小型船等を「船種」に基づいて識別し、優先度を低く設定し、あるいは上記処理の対象外とする。
(2) 「対地進路」に基づいて、自船舶の進路との共通性が高く、かつ衝突の危険性が高い船舶の優先度を高く設定する。
【0037】
(3) 「目的地」と自船舶の目的地との地理的な隔たりが小さく、かつ衝突の危険性が高い船舶の優先度を高く設定する。
(4) 「対地船速」が速く、自船舶との衝突の危険性が高い船舶の優先度を高く設定する。
【0038】
(5) 「航海の状態」に基づきアンカリング中や接岸中と予測される船舶のように、主目標を特定する必要性が高い船舶の優先度を高く設定する。
(6) 衝突等に際して被る危険性が高い「積載物」を積載している船舶の優先度を高く設定する。
【0039】
また、本発明は、上述した実施形態に限定されず、本発明の範囲において多様な実施形態の構成が可能であり、構成要素の全てまたは一部に如何なる改良が施されてもよい。
【0040】
以下、本願に開示された発明を整理し、「特許請求の範囲」および「課題を解決するための手段」の欄の記載に準じた様式により列記する。
【0041】
[請求項1] 目標が位置する領域を識別する領域識別手段と、
レーダが受信した受信波で示される目標の内、前記領域に位置する目標を一本化し、1つの目標として検出する目標検出手段と
を備えたことを特徴とする疑似目標除去装置。
このような構成の疑似目標除去装置では、領域識別手段は、目標が位置する領域を識別する。目標検出手段は、レーダが受信した受信波で示される目標の内、前記領域に位置する目標を一本化し、1つの目標として検出する。
すなわち、共通の目標で生じた複数の反射波に対応して個別に識別され得る目標は、その共通の目標が位置する領域内で生じた反射波の何れか1つに対応する1つの目標に一本化されて識別される。
したがって、大きな目標であっても、その目標の形状、姿勢および状態の如何にかかわらず、精度よく安定に1つの目標として識別される。
【0042】
[請求項2] 請求項1に記載の疑似目標除去装置において、
前記領域識別手段は、
前記1つの目標によって間欠的に通知された前記1つの目標の寸法に基づいて前記領域を識別する
ことを特徴とする疑似目標除去装置。
このような構成の疑似目標除去装置では、請求項1に記載の疑似目標除去装置において、前記領域識別手段は、前記1つの目標によって間欠的に通知された前記1つの目標の寸法に基づいて前記領域を識別する。
すなわち、実質的な1つの目標が占める領域は、その1つの目標の寸法に基づいて精度よく識別される。
したがって、このような実質的な1つの目標が実体とは異なる複数の目標として識別され難くなる。
【0043】
[請求項3] 請求項1に記載の疑似目標除去装置において、
前記領域識別手段は、
前記1つの目標によって間欠的に通知された前記1つの目標の姿勢および寸法に基づいて前記領域を識別する
ことを特徴とする疑似目標除去装置。
このような構成の疑似目標除去装置では、請求項1に記載の疑似目標除去装置において、前記領域識別手段は、前記1つの目標によって間欠的に通知された前記1つの目標の姿勢および寸法に基づいて前記領域を識別する。
すなわち、実質的な1つの目標が占める領域は、その1つの目標の寸法だけではなく、姿勢にも基づいて精度よく識別される。
したがって、このような実質的な1つの目標は、反射体としての形状や寸法が上記姿勢に応じて変化する場合であっても、実体とは異なる複数の目標として識別され難くなる。
【0044】
[請求項4] 請求項1に記載の疑似目標除去装置において、
前記領域識別手段は、
前記1つの目標によって間欠的に通知された前記1つの目標の姿勢、形状および寸法に基づいて前記領域を識別する
ことを特徴とする疑似目標除去装置。
このような構成の疑似目標除去装置では、請求項1に記載の疑似目標除去装置において、前記領域識別手段は、前記1つの目標によって間欠的に通知された前記1つの目標の姿勢、形状および寸法に基づいて前記領域を識別する。
すなわち、実質的な1つの目標が占める領域は、その1つの目標の姿勢および寸法だけではなく、形状にも基づいて精度よく識別される。
したがって、このような実質的な1つの目標は、形状が複雑であっても、実体とは異なる複数の目標として識別され難くなる。
【0045】
[請求項5] 請求項1に記載の疑似目標除去装置において、
前記領域識別手段は、
前記レーダに対する応答として前記1つの目標から通知された前記1つの目標の寸法に基づいて前記領域を識別する
ことを特徴とする疑似目標除去装置。
このような構成の疑似目標除去装置では、請求項1に記載の疑似目標除去装置において、前記領域識別手段は、前記レーダに対する応答として前記1つの目標から通知された前記1つの目標の寸法に基づいて前記領域を識別する。
すなわち、実質的な1つの目標が占める領域は、その1つの目標の寸法に基づいて精度よく識別される。
したがって、このような実質的な1つの目標が実体とは異なる複数の目標として識別され難くなる。
【0046】
[請求項6] 請求項1に記載の疑似目標除去装置において、
前記領域識別手段は、
前記レーダに対する応答として前記1つの目標から通知された前記1つの目標の姿勢および寸法に基づいて前記領域を識別する
ことを特徴とする疑似目標除去装置。
このような構成の疑似目標除去装置では、請求項1に記載の疑似目標除去装置において、前記領域識別手段は、前記レーダに対する応答として前記1つの目標から通知された前記1つの目標の姿勢および寸法に基づいて前記領域を識別する。
すなわち、実質的な1つの目標が占める領域は、その1つの目標の寸法だけではなく、姿勢にも基づいて精度よく識別される。
したがって、このような実質的な1つの目標は、反射体としての形状や寸法が上記姿勢に応じて変化する場合であっても、実体とは異なる複数の目標として識別され難くなる。
【0047】
[請求項7] 請求項1に記載の疑似目標除去装置において、
前記領域識別手段は、
前記レーダに対する応答として前記1つの目標から通知された前記1つの目標の姿勢、形状および寸法に基づいて前記領域を識別する
ことを特徴とする疑似目標除去装置。
このような構成の疑似目標除去装置では、請求項1に記載の疑似目標除去装置において、前記領域識別手段は、前記レーダに対する応答として前記1つの目標から通知された前記1つの目標の姿勢、形状および寸法に基づいて前記領域を識別する。
すなわち、実質的な1つの目標が占める領域は、その1つの目標の姿勢および寸法だけではなく、形状にも基づいて精度よく識別される。
したがって、このような実質的な1つの目標は、形状が複雑であっても、実体とは異なる複数の目標として識別され難くなる。
【0048】
[請求項8] 請求項1に記載の疑似目標除去装置において、
前記領域識別手段は、
前記レーダに対する応答として前記1つの目標から通知された識別情報に対応してデータベースに登録されている前記1つの目標の寸法を取得し、前記寸法に基づいて前記領域を識別する
ことを特徴とする疑似目標除去装置。
このような構成の疑似目標除去装置では、請求項1に記載の疑似目標除去装置において、前記領域識別手段は、前記レーダに対する応答として前記1つの目標から通知された識別情報に対応してデータベースに登録されている前記1つの目標の寸法を取得し、前記寸法に基づいて前記領域を識別する。
すなわち、実質的な1つの目標が占める領域は、その1つの目標の寸法に基づいて精度よく識別される。
したがって、このような実質的な1つの目標が実体とは異なる複数の目標として識別され難くなる。
【0049】
[請求項9] 請求項1に記載の疑似目標除去装置において、
前記領域識別手段は、
前記レーダに対する応答として前記1つの目標から通知された識別情報に対応してデータベースに登録されている前記1つの目標の姿勢および寸法を取得し、前記姿勢および寸法に基づいて前記領域を識別する
ことを特徴とする疑似目標除去装置。
このような構成の疑似目標除去装置では、請求項1に記載の疑似目標除去装置において、前記領域識別手段は、前記レーダに対する応答として前記1つの目標から通知された識別情報に対応してデータベースに登録されている前記1つの目標の姿勢および寸法を取得し、前記姿勢および寸法に基づいて前記領域を識別する。
すなわち、実質的な1つの目標が占める領域は、その1つの目標の寸法だけではなく、姿勢にも基づいて精度よく識別される。
したがって、このような実質的な1つの目標は、反射体としての形状や寸法が上記姿勢に応じて変化する場合であっても、実体とは異なる複数の目標として識別され難くなる。
【0050】
[請求項10] 請求項1に記載の疑似目標除去装置において、
前記領域識別手段は、
前記レーダに対する応答として前記1つの目標から通知された識別情報に対応してデータベースに登録されている前記1つの目標の姿勢、形状および寸法を取得し、前記姿勢、形状および寸法に基づいて前記領域を識別する
ことを特徴とする疑似目標除去装置。
このような構成の疑似目標除去装置では、請求項1に記載の疑似目標除去装置において、前記領域識別手段は、前記レーダに対する応答として前記1つの目標から通知された識別情報に対応してデータベースに登録されている前記1つの目標の姿勢、形状および寸法を取得し、前記姿勢、形状および寸法に基づいて前記領域を識別する。
すなわち、実質的な1つの目標が占める領域は、その1つの目標の姿勢および寸法だけではなく、形状にも基づいて精度よく識別される。
したがって、このような実質的な1つの目標は、形状が複雑であっても、実体とは異なる複数の目標として識別され難くなる。
【0051】
[請求項11] 請求項1ないし請求項10の何れか1項に記載の疑似目標除去装置において、
前記目標検出手段は、
前記領域の重心として前記1つの目標の位置を特定する
ことを特徴とする疑似目標除去装置。
このような構成の疑似目標除去装置では、請求項1ないし請求項10の何れか1項に記載の疑似目標除去装置において、前記目標検出手段は、前記領域の重心として前記1つの目標の位置を特定する。
すなわち、複数の反射波の源となった目標の位置は、その目標の姿勢、形状、寸法が一定でなくても、精度よく安定に特定される。
したがって、多様な目標の測位が精度よく実現される。
【0052】
[請求項12] 請求項1ないし請求項10の何れか1項に記載の疑似目標除去装置において、
前記目標検出手段は、
前記領域に位置する目標の内、サイズが最大である目標を前記1つの目標として検出する
ことを特徴とする疑似目標除去装置。
このような構成の疑似目標除去装置では、請求項1ないし請求項10の何れか1項に記載の疑似目標除去装置において、前記目標検出手段は、前記領域に位置する目標の内、サイズが最大である目標を前記1つの目標として検出する。
すなわち、複数の反射波の源となった目標の位置は、その目標の姿勢、形状、寸法が一定でなくても、上記反射波が生じる最大の反射体の位置として特定される。
したがって、多様な目標の測位が精度よく実現される。
【0053】
[請求項13] 請求項1ないし請求項10の何れか1項に記載の疑似目標除去装置において、
前記目標検出手段は、
前記領域に位置する目標の内、前記受信波のレベルが最大である目標を前記1つの目標として検出する
ことを特徴とする疑似目標除去装置。
このような構成の疑似目標除去装置では、請求項1ないし請求項10の何れか1項に記載の疑似目標除去装置において、前記目標検出手段は、前記領域に位置する目標の内、前記受信波のレベルが最大である目標を前記1つの目標として検出する。
すなわち、複数の反射波の源となった目標の位置は、その目標の姿勢、形状、寸法が一定でなくても、上記反射波が生じる最大の反射体の位置として特定される。
したがって、多様な目標の測位が精度よく実現される。
【0054】
[請求項14] 請求項1ないし請求項13の何れか1項に記載の疑似目標除去装置において、
前記領域識別手段は、
前記1つの目標によって通知された前記1つの目標の種類を取得し、前記1つの目標の一本化に必要な処理の優先度を前記種類に応じて設定する
ことを特徴とする疑似目標除去装置。
このような構成の疑似目標除去装置では、請求項1ないし請求項13の何れか1項に記載の疑似目標除去装置において、前記領域識別手段は、前記1つの目標によって通知された前記1つの目標の種類を取得し、前記1つの目標の一本化に必要な処理の優先度を前記種類に応じて設定する。
すなわち、既述の一本化の処理は、その処理の必要性が目標の種類に基づく識別の下で他の目標より優先的にあるいは非優先的に行われる。
したがって、本発明の適用のために確保されるべき処理量が無用に大きくなり、あるいは応答性が過度に低下することが回避される。
【0055】
[請求項15] 請求項1ないし請求項13の何れか1項に記載の疑似目標除去装置において、
前記領域識別手段は、
前記1つの目標によって通知された前記1つの目標の進路を取得し、前記進路と前記疑似目標除去装置が搭載された移動体の進路との相関性に応じて、前記1つの目標の一本化に必要な処理の優先度を設定する
ことを特徴とする疑似目標除去装置。
このような構成の疑似目標除去装置では、請求項1ないし請求項13の何れか1項に記載の疑似目標除去装置において、前記領域識別手段は、前記1つの目標によって通知された前記1つの目標の進路を取得し、前記進路と前記疑似目標除去装置が搭載された移動体の進路との相関性に応じて、前記1つの目標の一本化に必要な処理の優先度を設定する。
すなわち、既述の一本化の処理は、本発明が適用された移動体との進路の相関性に基づいて他の目標より優先的にあるいは非優先的に行われる。
したがって、本発明の適用のために確保されるべき処理量が無用に大きくなり、あるいは応答性が過度に低下することが回避される。
【0056】
[請求項16] 請求項1ないし請求項13の何れか1項に記載の疑似目標除去装置において、
前記領域識別手段は、
前記1つの目標によって通知された前記1つの目標の速度を取得し、前記1つの目標への一本化に必要な処理の優先度を前記速度に応じて設定する
ことを特徴とする疑似目標除去装置。
このような構成の疑似目標除去装置では、請求項1ないし請求項13の何れか1項に記載の疑似目標除去装置において、前記領域識別手段は、前記1つの目標によって通知された前記1つの目標の速度を取得し、前記1つの目標への一本化に必要な処理の優先度を前記速度に応じて設定する。
すなわち、既述の一本化の処理は、目標毎の速度に基づいて他の目標より優先的にあるいは非優先的に行われる。
したがって、本発明の適用のために確保されるべき処理量が無用に大きくなり、あるいは応答性が過度に低下することが回避される。
【0057】
[請求項17] 請求項1ないし請求項13の何れか1項に記載の疑似目標除去装置において、
前記領域識別手段は、
前記1つの目標によって通知された前記1つの目標の状態を取得し、前記1つの目標への一本化に必要な処理の優先度を前記状態に応じて設定する
ことを特徴とする疑似目標除去装置。
このような構成の疑似目標除去装置では、請求項1ないし請求項13の何れか1項に記載の疑似目標除去装置において、前記領域識別手段は、前記1つの目標によって通知された前記1つの目標の状態を取得し、前記1つの目標への一本化に必要な処理の優先度を前記状態に応じて設定する。
すなわち、既述の一本化の処理は、目標毎の状態に基づいて他の目標より優先的にあるいは非優先的に行われる。
したがって、本発明の適用のために確保されるべき処理量が無用に大きくなり、あるいは応答性が過度に低下することが回避される。
【0058】
[請求項18] 請求項1ないし請求項13の何れか1項に記載の疑似目標除去装置において、
前記領域識別手段は、
前記1つの目標によって通知された前記1つの目標の積載物を取得し、前記1つの目標への一本化に必要な処理の優先度を前記積載物の属性に応じて設定する
ことを特徴とする疑似目標除去装置。
このような構成の疑似目標除去装置では、請求項1ないし請求項13の何れか1項に記載の疑似目標除去装置において、前記領域識別手段は、前記1つの目標によって通知された前記1つの目標の積載物を取得し、前記1つの目標への一本化に必要な処理の優先度を前記積載物の属性に応じて設定する。
すなわち、既述の一本化の処理は、目標毎の積載物の属性に基づいて他の目標より優先的にあるいは非優先的に行われる。
したがって、本発明の適用のために確保されるべき処理量が無用に大きくなり、あるいは応答性が過度に低下することが回避される。
【0059】
[請求項19] レーダが受信した受信波で示される個々の目標の位置を求める測位手段と、
前記個々の目標の位置に対応してデータベースに登録されている目標を一本化し、1つの目標として検出する目標検出手段と
を備えたことを特徴とする疑似目標除去装置。
このような構成の疑似目標除去装置では、測位手段は、レーダが受信した受信波で示される個々の目標の位置を求める。目標検出手段は、前記個々の目標の位置に対応してデータベースに登録されている目標を一本化し、1つの目標として検出する。
すなわち、共通の目標で生じた複数の反射波に対応して個別に識別され得る目標は、その共通の目標が位置する領域内で生じた反射波の何れか1つに対応する1つの目標に一本化されて識別される。
したがって、大きな目標であっても、その目標の形状、姿勢および状態の如何にかかわらず、精度よく安定に1つの目標として識別される。
【0060】
[請求項20] 請求項19に記載の疑似目標除去装置において、
前記目標検出手段は、
前記レーダが受信した受信波で示される個々の目標に最寄りの目標の寸法をデータベースより取得し、前記最寄りの目標の寸法に基づいて前記領域を識別する
ことを特徴とする疑似目標除去装置。
このような構成の疑似目標除去装置では、請求項19に記載の疑似目標除去装置において、前記目標検出手段は、前記レーダが受信した受信波で示される個々の目標に最寄りの目標の寸法をデータベースより取得し、前記最寄りの目標の寸法に基づいて前記領域を識別する。
すなわち、実質的な1つの目標が占める領域は、その1つの目標の寸法に基づいて精度よく識別される。
したがって、このような実質的な1つの目標が実体とは異なる複数の目標として識別され難くなる。
【0061】
[請求項21] 請求項19に記載の疑似目標除去装置において、
前記目標検出手段は、
前記レーダが受信した受信波で示される個々の目標に最寄りの目標の姿勢および寸法をデータベースより取得し、前記最寄りの目標の姿勢および寸法に基づいて前記領域を識別する
ことを特徴とする疑似目標除去装置。
このような構成の疑似目標除去装置では、請求項19に記載の疑似目標除去装置において、前記目標検出手段は、前記レーダが受信した受信波で示される個々の目標に最寄りの目標の姿勢および寸法をデータベースより取得し、前記最寄りの目標の姿勢および寸法に基づいて前記領域を識別する。
すなわち、実質的な1つの目標が占める領域は、その1つの目標の寸法だけではなく、姿勢にも基づいて精度よく識別される。
したがって、このような実質的な1つの目標は、反射体としての形状や寸法が上記姿勢に応じて変化する場合であっても、実体とは異なる複数の目標として識別され難くなる。
【0062】
[請求項22] 請求項19に記載の疑似目標除去装置において、
前記目標検出手段は、
前記レーダが受信した受信波で示される個々の目標の位置に最寄りの目標の姿勢、形状および寸法をデータベースより取得し、前記最寄りの目標の姿勢、形状および寸法に基づいて前記領域を識別する
ことを特徴とする疑似目標除去装置。
このような構成の疑似目標除去装置では、請求項19に記載の疑似目標除去装置において、前記目標検出手段は、前記レーダが受信した受信波で示される個々の目標の位置に最寄りの目標の姿勢、形状および寸法をデータベースより取得し、前記最寄りの目標の姿勢、形状および寸法に基づいて前記領域を識別する。
すなわち、実質的な1つの目標が占める領域は、その1つの目標の姿勢および寸法だけではなく、形状にも基づいて精度よく識別される。
したがって、このような実質的な1つの目標は、形状が複雑であっても、実体とは異なる複数の目標として識別され難くなる。
【0063】
[請求項23] 請求項19ないし請求項22の何れか1項に記載の疑似目標除去装置において、
前記目標検出手段は、
前記1つの目標の寸法に併せて、前記1つの目標の種類を前記データベースより取得し、前記1つの目標への一本化に必要な処理の優先度を前記1つの目標の種類に応じて設定する
ことを特徴とする疑似目標除去装置。
このような構成の疑似目標除去装置では、請求項19ないし請求項22の何れか1項に記載の疑似目標除去装置において、前記目標検出手段は、前記1つの目標の寸法に併せて、前記1つの目標の種類を前記データベースより取得し、前記1つの目標への一本化に必要な処理の優先度を前記1つの目標の種類に応じて設定する。
すなわち、既述の一本化の処理は、その処理の必要性が目標の種類に基づく識別の下で他の目標より優先的にあるいは非優先的に行われる。
したがって、本発明の適用のために確保されるべき処理量が無用に大きくなり、あるいは応答性が過度に低下することが回避される。
【0064】
[請求項24] 請求項19ないし請求項22の何れか1項に記載の疑似目標除去装置において、
前記目標検出手段は、
前記1つの目標の寸法に併せて、前記1つの目標の進路を前記データベースより取得し、前記進路と前記疑似目標除去装置が搭載された移動体の進路との相関性に応じて、前記1つの目標への一本化に必要な処理の優先度を設定する
ことを特徴とする疑似目標除去装置。
このような構成の疑似目標除去装置では、請求項19ないし請求項22の何れか1項に記載の疑似目標除去装置において、前記目標検出手段は、前記1つの目標の寸法に併せて、前記1つの目標の進路を前記データベースより取得し、前記進路と前記疑似目標除去装置が搭載された移動体の進路との相関性に応じて、前記1つの目標への一本化に必要な処理の優先度を設定する。
すなわち、既述の一本化の処理は、本発明が適用された移動体との進路の相関性に基づいて他の目標より優先的にあるいは非優先的に行われる。
したがって、本発明の適用のために確保されるべき処理量が無用に大きくなり、あるいは応答性が過度に低下することが回避される。
【0065】
[請求項25] 請求項19ないし請求項22の何れか1項に記載の疑似目標除去装置において、
前記目標検出手段は、
前記1つの目標の寸法に併せて、前記1つの目標の速度を前記データベースより取得し、前記1つの目標への一本化に必要な処理の優先度を前記1つの目標の速度に応じて設定する
ことを特徴とする疑似目標除去装置。
このような構成の疑似目標除去装置では、請求項19ないし請求項22の何れか1項に記載の疑似目標除去装置において、前記目標検出手段は、前記1つの目標の寸法に併せて、前記1つの目標の速度を前記データベースより取得し、前記1つの目標への一本化に必要な処理の優先度を前記1つの目標の速度に応じて設定する。
すなわち、既述の一本化の処理は、目標毎の速度に基づいて他の目標より優先的にあるいは非優先的に行われる。
したがって、本発明の実現のために確保されるべき処理量が無用に大きくなり、あるいは応答性が過度に低下することが回避される。
【0066】
[請求項26] 請求項19ないし請求項22の何れか1項に記載の疑似目標除去装置において、
前記目標検出手段は、
前記1つの目標の寸法に併せて、前記1つの目標の状態を前記データベースより取得し、前記1つの目標への一本化に必要な処理の優先度を前記1つの目標の状態に応じて設定する
ことを特徴とする疑似目標除去装置。
このような構成の疑似目標除去装置では、請求項19ないし請求項22の何れか1項に記載の疑似目標除去装置において、前記目標検出手段は、前記1つの目標の寸法に併せて、前記1つの目標の状態を前記データベースより取得し、前記1つの目標への一本化に必要な処理の優先度を前記1つの目標の状態に応じて設定する。
すなわち、既述の一本化の処理は、目標毎の状態に基づいて他の目標より優先的にあるいは非優先的に行われる。
したがって、本発明の適用のために確保されるべき処理量が無用に大きくなり、あるいは応答性が過度に低下することが回避される。
【0067】
[請求項27] 請求項19ないし請求項22の何れか1項に記載の疑似目標除去装置において、
前記目標検出手段は、
前記1つの目標の寸法に併せて、前記1つの目標の積載物を前記データベースより取得し、前記1つの目標への一本化に必要な処理の優先度を前記積載物の属性に応じて設定する
このような構成の疑似目標除去装置では、請求項19ないし請求項22の何れか1項に記載の疑似目標除去装置において、前記目標検出手段は、前記1つの目標の寸法に併せて、前記1つの目標の積載物を前記データベースより取得し、前記1つの目標への一本化に必要な処理の優先度を前記積載物の属性に応じて設定する。
すなわち、既述の一本化の処理は、目標毎の積載物の属性に基づいて他の目標より優先的にあるいは非優先的に行われる。
したがって、本発明の適用のために確保されるべき処理量が無用に大きくなり、あるいは応答性が過度に低下することが回避される。
【0068】
[請求項28] 移動体の位置を特定する測位手段と、
無線伝送路を介して外部に前記移動体の位置およびサイズを報知する報知手段と
を備えた移動体自動識別装置において、
前記報知手段は、
前記移動体の位置およびサイズに併せて、前記移動体の形状を前記無線伝送路を介して外部に報知する
ことを特徴とする移動体自動識別装置。
このような構成の移動体自動識別装置では、測位手段は、移動体の位置を特定する。報知手段は、前記移動体の位置およびサイズに併せて、前記移動体の形状を前記無線伝送路を介して外部に報知する。
すなわち、本発明に係る移動体自動識別装置が備えられた移動体は、測距や測位がその移動体の位置およびサイズだけではなく、形状にも基づいて精度よく実現可能となる。
したがって、本発明に係る移動体自動識別装置が備えられた移動体は、形状が複雑であっても、実体とは異なる複数の目標として識別され難くなる。
【0069】
[請求項29] 請求項28に記載の移動体自動識別装置において、
前記報知手段は、
前記無線伝送路を介して外部から与えられた要求に応じて、前記移動体の位置およびサイズに併せて、前記移動体の形状を前記無線伝送路を介して外部に報知する
ことを特徴とする移動体自動識別装置。
このような構成の移動体自動識別装置では、請求項28に記載の移動体自動識別装置において、前記報知手段は、前記無線伝送路を介して外部から与えられた要求に応じて、前記移動体の位置およびサイズに併せて、前記移動体の形状を前記無線伝送路を介して外部に報知する。
すなわち、本発明に係る移動体自動識別装置が備えられた移動体は、測距や測位がその移動体の位置およびサイズだけではなく、形状にも基づいて精度よく実現可能となる。
したがって、本発明に係る移動体自動識別装置が備えられた移動体は、形状が複雑であっても、実体とは異なる複数の目標として識別され難くなる。
【符号の説明】
【0070】
10 船舶レーダ
11,24 目標検出部
12,14 AISトランスポンダ
13 目標船舶
21 空中線
22 送受信部
23 信号処理部
25 追尾処理部
【特許請求の範囲】
【請求項1】
目標が位置する領域を識別する領域識別手段と、
レーダが受信した受信波で示される目標の内、前記領域に位置する目標を一本化し、1つの目標として検出する目標検出手段と
を備えたことを特徴とする疑似目標除去装置。
【請求項2】
レーダが受信した受信波で示される個々の目標の位置を求める測位手段と、
前記個々の目標の位置に対応してデータベースに登録されている共通の目標を一本化し、1つの目標として検出する目標検出手段と
を備えたことを特徴とする疑似目標除去装置。
【請求項3】
移動体の位置を特定する測位手段と、
無線伝送路を介して外部に前記移動体の位置およびサイズを報知する報知手段と
を備えた移動体自動識別装置において、
前記報知手段は、
前記移動体の位置およびサイズに併せて、前記移動体の形状を前記無線伝送路を介して外部に報知する
ことを特徴とする移動体自動識別装置。
【請求項1】
目標が位置する領域を識別する領域識別手段と、
レーダが受信した受信波で示される目標の内、前記領域に位置する目標を一本化し、1つの目標として検出する目標検出手段と
を備えたことを特徴とする疑似目標除去装置。
【請求項2】
レーダが受信した受信波で示される個々の目標の位置を求める測位手段と、
前記個々の目標の位置に対応してデータベースに登録されている共通の目標を一本化し、1つの目標として検出する目標検出手段と
を備えたことを特徴とする疑似目標除去装置。
【請求項3】
移動体の位置を特定する測位手段と、
無線伝送路を介して外部に前記移動体の位置およびサイズを報知する報知手段と
を備えた移動体自動識別装置において、
前記報知手段は、
前記移動体の位置およびサイズに併せて、前記移動体の形状を前記無線伝送路を介して外部に報知する
ことを特徴とする移動体自動識別装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図2】
【図3】
【図4】
【図5】
【図6】
【公開番号】特開2010−190620(P2010−190620A)
【公開日】平成22年9月2日(2010.9.2)
【国際特許分類】
【出願番号】特願2009−33141(P2009−33141)
【出願日】平成21年2月16日(2009.2.16)
【出願人】(000004330)日本無線株式会社 (1,186)
【Fターム(参考)】
【公開日】平成22年9月2日(2010.9.2)
【国際特許分類】
【出願日】平成21年2月16日(2009.2.16)
【出願人】(000004330)日本無線株式会社 (1,186)
【Fターム(参考)】
[ Back to top ]