
疲労損傷監視装置
【課題】信頼性の高い健全性評価を簡易かつ小型の装置で行うことができる、建築物の疲労損傷監視装置を提供すること。
【解決手段】建築物の疲労損傷監視装置10は、疲労損傷の評価対象となる建築物に取り付けられる装置であって、建築物の変位を測定する変位センサ13と、建築物の疲労損傷値を記憶する記憶部14と、変位センサ13にて測定された変位に基づいて疲労損傷値を算定し、当該算定した疲労損傷値を記憶部14に記憶させる算定部18aと、記憶部14に記憶された疲労損傷値を疲労損傷評価装置20に出力する送受信部15とを備える。
【解決手段】建築物の疲労損傷監視装置10は、疲労損傷の評価対象となる建築物に取り付けられる装置であって、建築物の変位を測定する変位センサ13と、建築物の疲労損傷値を記憶する記憶部14と、変位センサ13にて測定された変位に基づいて疲労損傷値を算定し、当該算定した疲労損傷値を記憶部14に記憶させる算定部18aと、記憶部14に記憶された疲労損傷値を疲労損傷評価装置20に出力する送受信部15とを備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、建築物の疲労損傷の監視を行う疲労損傷監視装置に関する。
【背景技術】
【0002】
従来、各種の建築物の健全性監視(ヘルスモニタリング)を行うため、様々な装置が提案されている。例えば、建築物の所定位置に設置した最大値記憶型センサと、この最大値記憶型センサに接続されたRFセンサタグを備える建築物の状態検査システムが提案されている。このシステムでは、最大値記憶型センサを用いて変位や歪みを測定し、これら変位や歪みをRFセンサタグが取得し、このRFセンサタグにおいて、現時点における建築物の状態量の最大値と建築物の状態量の許容値とを比較して、建築物の健全性を評価していた(例えば特許文献1参照。特に健全性評価方法は段落0012参照)。
【0003】
また、建築物に加速度センサを設置し、このセンサで計測した加速度を、当該センサと同一基板上のCPU(Central Processing Unit)で加速度のゼロクロス点数、加速度最大値、及び振幅累積値に変換し、これら変換後の各値を、中継局を介して親局に送信するシステムが開示されている(例えば非特許文献1参照)。さらに、この非特許文献1に記載のシステムによれば、計測データの加速度最大値等の損傷指標への変換を加速度センサの内部で行うことで、加速度センサから外部装置へのデータ転送量を低減することが可能となっている。
【0004】
【特許文献1】特開2005−207867号公報
【非特許文献1】圓幸史朗、池ヶ谷靖、中村充、柳瀬高仁、「スマートセンサと無線ネットワークを用いた構造ヘルスモニタリングシステムの開発」、日本地震工学会論文集、第7巻、第6号、2007
【発明の開示】
【発明が解決しようとする課題】
【0005】
ここで、建築物の健全性評価においては、建築物の疲労と損傷の両側面を評価することが好ましい。しかしながら、特許文献1に記載のシステムでは、現時点における建築物の状態量の最大値のみを用いて建築物の健全性を評価していたので、建築物の損傷をある程度は評価できるものの、繰り返し応力等による建築物の疲労を評価することはできず、信頼性の高い健全性評価を行うことはできなかった。
【0006】
一方、非特許文献1に記載のシステムによれば、加速度最大値に加えて振幅累積値を用いて建築物の健全性を評価していたので、建築物の疲労についてもある程度の評価を行うことが可能となる。しかしながら、この非特許文献1に記載のシステムでは、加速度最大値や振幅累積値を単に個別的に取り扱っており、疲労と損傷を統合した総合的な評価は行っていなかったので、依然として信頼性に欠けるものであった。
【0007】
また、信頼性の高い健全性評価を行うためには、センサのサンプリング周期を短くすることが好ましく、センサによって多量のデータが取得されることになる。このため、非特許文献1に記載されているように、単に損傷指標への変換を加速度センサの内部で行うこととしても、加速度センサの内部に多量のデータを記憶する記憶領域を確保する必要が生じることには変わりがなく、建築物の健全性を長期間に渡って評価するためには、加速度センサが大型化するといった問題が生じる。
【0008】
本発明は、上記に鑑みてなされたものであって、信頼性の高い健全性評価を簡易かつ小型の装置で行うことができる、建築物の疲労損傷監視装置を提供することを目的とする。
【課題を解決するための手段】
【0009】
上述した課題を解決し、目的を達成するために、請求項1に記載の建築物の疲労損傷監視装置は、疲労損傷の評価対象となる建築物に取り付けられる装置であって、前記建築物の変位を測定する変位測定手段と、前記建築物の疲労損傷値を記憶する記憶手段と、前記変位測定手段にて測定された変位に基づいて前記疲労損傷値を算定し、当該算定した疲労損傷値を前記記憶手段に記憶させる算定手段と、前記記憶手段に記憶された前記疲労損傷値を所定の外部機器に出力する出力手段とを備えることを特徴とする。
【0010】
請求項2に記載の建築物の疲労損傷監視装置は、請求項1に記載の建築物の疲労損傷監視装置において、前記記憶手段は、変位累積値及び変位最大値を記憶し、前記算定手段は、前記変位測定手段にて測定された変位に基づいて前記変位累積値、前記変位最大値、及び前記疲労損傷値を算定し、当該算定した変位累積値、変位最大値、及び疲労損傷値を前記記憶手段に記憶させ、前記出力手段は、前記記憶手段に記憶された前記変位累積値、前記変位最大値、及び前記疲労損傷値を前記外部機器に出力することを特徴とする。
【0011】
請求項3に記載の建築物の疲労損傷監視装置は、請求項1又は2に記載の建築物の疲労損傷監視装置において、前記記憶手段は、前記変位測定手段にて測定された変位を記憶し、前記算定手段は、前記変位測定手段にて測定された変位に基づく算定を行った後、当該算定に用いた変位を前記記憶手段から消去することを特徴とする。
【0012】
請求項4に記載の建築物の疲労損傷監視装置は、請求項1から3のいずれか一項に記載の建築物の疲労損傷監視装置において、前記出力手段は、無線通信手段であることを特徴とする。
【発明の効果】
【0013】
請求項1に記載の建築物の疲労損傷監視装置によれば、疲労損傷値を算定して外部機器に出力するので、この疲労損傷値を用いて、疲労と損傷を統合した総合的な評価を行うことが可能となり、建築物の健全性評価の信頼性を向上させることが可能となる。
【0014】
また、請求項2に記載の建築物の疲労損傷監視装置によれば、疲労損傷値に加えて、変位累積値及び変位最大値を算定して外部機器に出力するので、疲労損傷値に併せて変位累積値及び変位最大値を用いて建築物の健全性評価を行うことが可能となり、一層信頼性の高い健全性評価を行うことが可能となる。
【0015】
また、請求項3に記載の建築物の疲労損傷監視装置によれば、変位測定手段にて測定された変位に基づく算定を行った後、当該算定に用いた変位を記憶手段から消去するので、疲労損傷監視装置における記憶容量を低減できるため、疲労損傷監視装置の小型化や低コスト化を図ることができ、また外部機器へのデータ通信量を削減することで、データ通信に要する電力や時間を低減できる。
【0016】
また、請求項4に記載の建築物の疲労損傷監視装置によれば、出力手段を無線通信手段としたので、例えば疲労損傷監視装置を評価対象となる建築物に設置した後、この疲労損傷監視装置の周囲を仕上げ材等で覆うことで当該疲労損傷監視装置への直接的なアクセスが困難になった場合であっても、疲労損傷値等を容易に取得することが可能となる。
【発明を実施するための最良の形態】
【0017】
〔実施の形態〕
以下に添付図面を参照して、この発明に係る建築物の疲労損傷監視装置の一実施の形態を詳細に説明する。ただし、この実施の形態によって本発明が限定されるものではない。
【0018】
(構成)
最初に、本実施の形態に係る疲労損傷監視システムの構成について説明する。図1は本実施の形態に係る疲労損傷監視システムを模式的に示す説明図である。この疲労損傷監視システム1は、疲労損傷監視装置10と疲労損傷評価装置20を備えて構成されている。
【0019】
疲労損傷監視装置10は、疲労損傷の評価対象となる建築物に取り付けられ、この建築物における各種のデータの測定から解析までを行う。建築物の具体的種類は任意であるが、ここでは、免震装置を備える建築物を対象とし、この免震装置のダンパー100に疲労損傷監視装置10が取り付けられているものとする。このように免震装置や制振装置が取り付けられた建築物においては、これら免震装置や制振装置のダンパー100に荷重が集中する構造となっているため、これらダンパー100の疲労損傷を監視することにより、建築物の健全性を確実に効率よく評価することが可能となる。
【0020】
一方、疲労損傷評価装置20は、疲労損傷監視装置10から出力された各種のデータに基づいて、建築物の疲労損傷を評価する。
【0021】
(構成−疲労損傷監視装置)
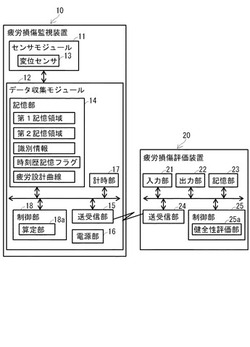
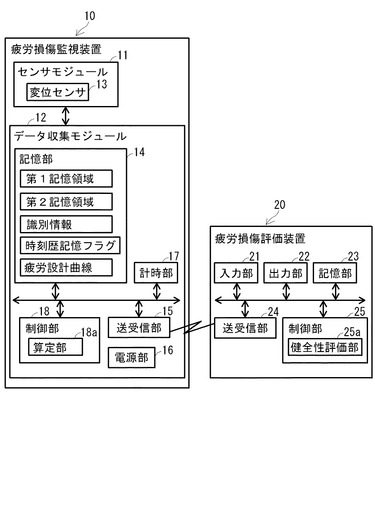
図2は、疲労損傷監視装置10と疲労損傷評価装置20を機能概念的に示すブロック図である。疲労損傷監視装置10は、センサモジュール11とデータ収集モジュール12を備えて構成されている。これらセンサモジュール11とデータ収集モジュール12は、相互に同一の筐体に収容されており、内部バスにて電気的に接続されてスマートセンサを構成する。ただし、これらセンサモジュール11とデータ収集モジュール12を相互に分離した上で有線又は無線にて相互に接続し、センサモジュール11のみをダンパー100に取り付けてもよい。
【0022】
(構成−疲労損傷監視装置−センサモジュール)
まず、センサモジュール11の構成について説明する。このセンサモジュール11は、具体的には変位センサ13を備える。この変位センサ13は、建築物の変位(免震装置のダンパー100の走行距離)を測定する変位測定手段であり、例えば、歪みセンサ、接触式変位センサ、超音波式変位センサ、光変位センサ、あるいはポテンショメータを用いることができる。なお、本実施の形態では、変位センサ13にて測定された変位に基づいて地震による加速度を算定することとしているが、加速度センサを別途設けてもよく、あるいは、センサモジュール11には、これら歪み及び加速度以外の物理量を測定するセンサを付加してもよく、例えば温度センサを設けてもよい。
【0023】
(構成−疲労損傷監視装置−データ収集モジュール)
次に、データ収集モジュール12の構成について説明する。このデータ収集モジュール12は、記憶部14、送受信部15、電源部16、計時部17、及び制御部18を備える。
【0024】
記憶部14は、センサモジュール11にて測定された変位、変位最大値、及び疲労損傷値の如き各種のデータを記憶する記憶手段であり、その具体的構成は任意であるが、例えばRAM(Random Access Memory)やフラッシュメモリを用いて構成される。ここでは、記憶部14の記憶領域として、第1記憶領域と第2記憶領域を設けており、第1記憶領域には疲労損傷データ(変位累積値、変位最大値、及び疲労損傷値)を記憶し、第2記憶領域には時刻歴データ(変位を、その測定時刻と対応付けたデータ)を記憶する。また、記憶部14は、疲労損傷監視装置10を一意に識別するための識別情報、時刻歴データの記憶の要否を特定するための時刻歴記憶フラグ、及び疲労設計曲線を記憶する。識別情報及び疲労設計曲線は任意の方法で記憶部14に予め記憶され、時刻歴記憶フラグは後述する時刻歴記憶開始処理で設定される。
【0025】
送受信部15は、疲労損傷評価装置20からの送信要求信号を受信し、疲労損傷評価装置20に対して記憶部14に記憶されたデータを送信するものであって、特許請求の範囲における出力手段に対応する。この送受信部15は、疲労損傷評価装置20との間で有線にて通信を行う有線通信手段として構成することもできるが、ここでは、疲労損傷評価装置20との有線接続が困難な環境下で遠隔的に送受信を行うことを想定しているため、送受信部15は無線通信を行う無線通信手段として構成されている。この無線通信手段としての送受信部15の具体的構成は任意であるが、例えば、図示しない送受信変換部及びアンテナを備えて構成されている。
【0026】
電源部16は、データ収集モジュール12の各部に電力を供給する電源手段である。この電源部16は、商用電源から電力を受電してデータ収集モジュール12の各部に配電する受配電手段として構成することもできるが、ここでは、商用電源が存在しない環境下で疲労損傷監視装置10を使用することを想定しているため、電源部16として、例えばボタン型のリチウム電池が採用されている。
【0027】
計時部17は、現在の時刻情報を公知の方法で取得して制御部18に出力する計時手段である。
【0028】
制御部18は、データ収集モジュール12の各部を制御する制御手段であり、例えば、CPUと、このCPU上で解析実行される各種のプログラムにより構成される(制御部25において同じ)。この制御部18は、機能概念的に算定部18aを備える。この算定部18aは、特許請求の範囲における算定手段に対応するものであり、その具体的機能については後述する。この算定部18aは、疲労損傷監視プログラムをネットワークや任意の記憶媒体を介してデータ収集モジュール12にインストールすることにより構成される。
【0029】
(構成−疲労損傷評価装置)
次に、疲労損傷評価装置20の構成について説明する。図2に示すように、疲労損傷評価装置20は、入力部21、出力部22、記憶部23、送受信部24、及び制御部25を備える。
【0030】
入力部21は、疲労損傷評価装置20に対する任意の情報を入力するための入力手段であり、例えば、図示しないキーボードやマウスによって構成されている。
【0031】
出力部22は、疲労損傷評価装置20から任意の情報を出力するための出力手段であり、例えば、図示しないディスプレイやスピーカによって構成されている。
【0032】
記憶部23は、データ収集モジュール12から送信されたデータを記憶する記憶手段であり、その具体的構成は任意であるが、例えばHD(Hard Disk)の如き不揮発性記憶媒体を用いて構成される。
【0033】
送受信部24は、データ収集モジュール12に対して送信要求信号を送信し、疲労損傷評価装置20から送信されたデータを受信する送受信手段である。この送受信部24は、データ収集モジュール12の送受信部15と同様に、有線にて通信を行う有線通信手段として構成することもできるが、ここでは、無線通信を行う無線通信手段として構成されており、例えば、図示しない送受信変換部及びアンテナを備えて構成されている。
【0034】
制御部25は、疲労損傷評価装置20の各部を制御する制御手段である。この制御部25は、機能概念的に健全性評価部25aを備える。この健全性評価部25aの具体的機能については後述する。この健全性評価部25aは、健全性評価プログラムをネットワークや任意の記憶媒体を介して疲労損傷評価装置20にインストールすることにより構成される。なお、このデータ収集モジュール12は、実際には公知のパーソナルコンピュータを用いて構成することができる。
【0035】
(処理)
次に、このように構成された疲労損傷監視システム1における疲労損傷監視処理について説明する。この疲労損傷監視処理は、リセット処理、時刻歴記憶開始処理、疲労損傷データ取得処理、疲労損傷データ送信要求処理、及び時刻歴データ送信要求処理に大別される。
【0036】
(処理−リセット処理)
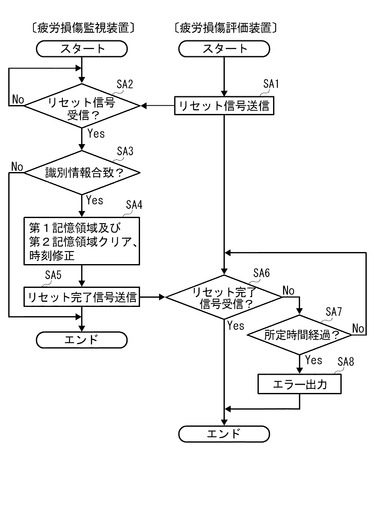
最初に、リセット処理について説明する。このリセット処理は、疲労損傷監視装置10の設置後に行われる処理であって、疲労損傷評価装置20からの指示により疲労損傷監視装置10をリセット(初期化)する処理である。このリセット処理のフローチャートを図3に示す。管理者は、疲労損傷評価装置20を疲労損傷監視装置10に対する通信範囲内に配置し(以降の他の処理においても同じ)、入力部21を介した所定方法によりリセットを指示する。疲労損傷評価装置20の制御部25は、所定形式のリセット信号を送受信部24を介して疲労損傷監視装置10に無線送信する(SA1)。このリセット信号には、リセット対象とする疲労損傷監視装置10の識別情報と、現在時刻を示す時刻データを含める。例えば、識別情報は、管理者が入力部21を介して入力してもよく、あるいは記憶部23に予め記憶させておいた各疲労損傷監視装置10の識別情報の中から所望の識別情報を管理者が入力部21を介して選択するようにしてもよい(以降の他の処理においても同じ)。時刻データは、疲労損傷評価装置20の図示しない内部時計から取得することができる。
【0037】
疲労損傷監視装置10の制御部18は、リセット信号を送受信部15を介して受信すると(SA2、Yes)、このリセット信号に含まれる識別情報が記憶部14に記憶された識別情報に合致するか否かを判定し(SA3)、合致しない場合には(SA3,No)、何ら処理を行うことなくリセット処理を終了し、合致する場合には(SA3,Yes)、記憶部14の第1記憶領域及び第2記憶領域をクリアすると共に、リセット信号に含まれる時刻データに基づいて計時部17の時刻を修正した後(SA4)、記憶部14に記憶された識別情報を含んだ所定形式のリセット完了信号を送受信部15を介して発信する(SA5)。
【0038】
疲労損傷評価装置20の制御部25は、リセット信号に含めたものと同一の識別情報を含んだリセット完了信号の受信を確認し(SA6)、リセット信号の送信から所定時間以上経過しても、当該リセット完了信号を受信しない場合には(SA6、No)(SA7、Yes)、エラー出力を出力部22を介して行うことで(SA8)、管理者に異常発生を報知する。一方、所定時間以上経過する前にリセット完了信号を送受信部24を介して受信した場合(SA6、Yes)、リセット処理を終了する。
【0039】
(処理−時刻歴記憶開始処理)
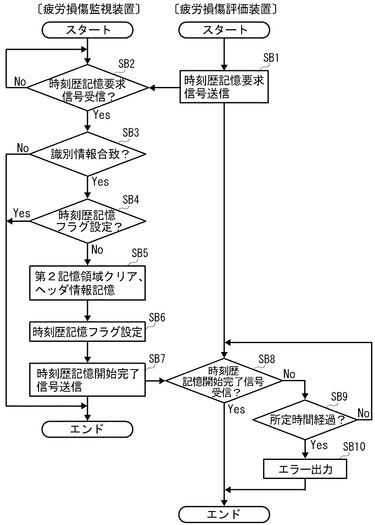
次に、時刻歴記憶開始処理について説明する。この時刻歴記憶開始処理は、疲労損傷評価装置20からの指示により疲労損傷監視装置10における時刻歴データの記憶を開始させる処理である。この時刻歴記憶開始処理のフローチャートを図4に示す。管理者は、疲労損傷評価装置20の入力部21を介した所定方法により時刻歴データの記憶開始を指示する。疲労損傷評価装置20の制御部25は、所定形式の時刻歴記憶要求信号を送受信部24を介して疲労損傷監視装置10に無線送信する(SB1)。この時刻歴記憶要求信号には、リセット処理と同様に、時刻歴データの記憶開始の指示対象とする疲労損傷監視装置10の識別情報を含める。
【0040】
疲労損傷監視装置10の制御部18は、時刻歴記憶要求信号を送受信部15を介して受信すると(SB2、Yes)、リセット処理と同様に識別情報の合致を確認した後(SB3)、時刻歴記憶フラグが既に記憶部14に設定されているか否かを判定し(SB4)、既に設定されている場合には(SB4、Yes)、何ら処理を行うことなくリセット処理を終了し、未だ設定されていない場合には(SB4、No)、記憶部14の第2記憶領域をクリアすると共に、この第2記憶領域にヘッダ情報を記憶させる(SB5)。このヘッダ情報としては、例えば、計時部17から取得した現在時刻を時刻歴データの記憶開始時間として含めたり、時刻歴データのサンプリング間隔ΔTを含めることができる。次いで、制御部18は、記憶部14に時刻歴記憶フラグを設定し(SB6)、記憶部14に記憶された識別情報を含んだ所定形式の時刻歴記憶開始完了信号を送受信部15を介して発信する(SB7)。
【0041】
疲労損傷評価装置20の制御部25は、時刻歴記憶要求信号に含めたものと同一の識別情報を含んだ時刻歴記憶開始完了信号の受信を確認し(SB8)、時刻歴記憶要求信号の送信から所定時間以上経過しても、当該時刻歴記憶開始完了信号を受信しない場合には(SB8、No)(SB9、Yes)、エラー出力を出力部22を介して行うことで(SB10)、管理者に異常発生を報知する。一方、所定時間以上経過する前に時刻歴記憶開始完了信号を送受信部24を介して受信した場合(SB8、Yes)、時刻歴記憶開始処理を終了する。
【0042】
(処理−疲労損傷データ取得処理)
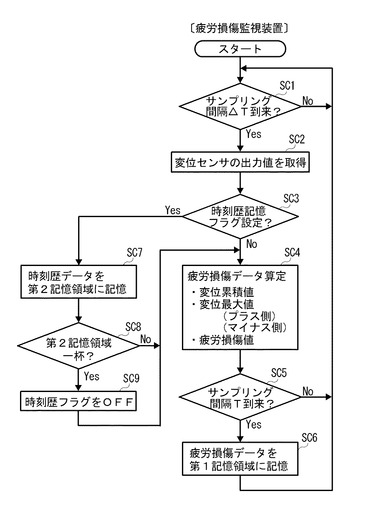
次に、疲労損傷データ取得処理について説明する。この疲労損傷データ取得処理は、疲労損傷監視装置10において各種のデータの収集及び算定を行う処理である。この疲労損傷データ取得処理のフローチャートを図5に示す。この処理では、所定のサンプリング間隔T(例えば100Hzや200Hz)による割り込み処理によって疲労損傷データの記憶を行い、所定のサンプリング間隔ΔT(<T)による割り込み処理によって時刻歴データの記憶を行う。ただし、時刻歴データの記憶は、上述した時刻歴記憶開始処理によって記憶部14に時刻歴記憶フラグが設定されている場合にのみ実行される。
【0043】
具体的には、算定部18aは、サンプリング間隔ΔTの到来の有無を監視し(SC1)、サンプリング間隔ΔTが到来した場合には(SC1、Yes)、センサモジュール11の変位センサ13からの出力値(例えば16bitの電圧値)を取得する(SC2)。次いで、算定部18aは、記憶部14に時刻歴記憶フラグが設定されているか否かを判定し(SC3)、設定されていない場合には(SC3、No)、SC2で取得した出力値に基づいて疲労損傷データを所定方法にて算定する(SC4)。
【0044】
例えば、算定部18aは、変位センサ13からの出力値に所定の校正値を乗ずることで、当該出力値を物理量(すなわち免震装置のダンパー100の走行距離=変位)に変換して変位を得る。また、算定部18aは、当該取得した変位を、その時点において記憶部14の第1記憶領域に記憶されている変位累積値に加算することで、変位累積値を更新する(第1回目の処理では当該取得した変位を変位累積値とする)。また、算定部18aは、当該取得した変位を、その時点において第1記憶領域に記憶されている変位最大値と比較し、当該取得した変位が変位最大値より大きい場合には、当該取得した変位で変位最大値を上書きすることで、変位最大値を更新する。なお、変位最大値としては、変位ゼロを基準としてプラス側の最大値とマイナス側の最大値を取得する。
【0045】
さらに、算定部18aは、当該取得した変位に基づいて疲労損傷値を算定する。ここで、疲労損傷値とは、評価対象の疲労と損傷を統合した総合的な評価指標であり、例えば、マイナー則(累積損傷則:Miner’s Rule)によって算定する。マイナー則とは、金属部材の疲労損傷を評価する手法の一つであり、一定振幅の繰り返し荷重下での疲労試験の結果を元に、評価対象(ここではダンパー100)の歪み振幅と損傷に至るまでの加力回数との関係を示す疲労曲線を予め求め、この疲労曲線を用いて、実際に生ずる変動歪み振幅に対する累積的な疲労損傷を評価する手法である。例えば、繰り返し歪み振幅εと、評価対象が損傷する疲労寿命回数Nを用いた場合、疲労設計曲線は図6に示すように表され、この関係式はb=log(ε+Na)となる。ここで、図6におけるε0は疲労損傷に寄与する歪み振幅の下限値であり、この下限値以下の歪み振幅については疲労照査の必要がないことを示す。また、疲労損傷値Dは、各歪み振幅εiの繰り返し回数niを以下の式で累積することで算出される。ここで、Niは歪み振幅εiでの疲労寿命回数である。
D=Σ(ni/Ni)・・・式(1)
【0046】
より具体的には、算定部18aは、変位センサ13からの出力値に基づいて取得した変位が、予め決定された歪み振幅の下限値ε0以下であるか否かを判定し、下限値ε0以下である場合には、当該取得した変位に基づく疲労損傷値の算出は行わず、下限値ε0を超える場合には、当該取得した変位に基づいて疲労損傷値の算出を行う。この算出や更新では、当該取得した変位(マイナー則における歪み振幅)と、記憶部14に予め記憶された疲労設計曲線とに基づいて、式(1)におけるni/Niを算定し、このni/NiをSC4を繰り返す毎に累積することで、式(1)における疲労損傷値Dを算出する。ここで、算定部18aは、疲労損傷データを記憶部14の第1記憶領域に記憶する際、当該疲労損傷データの算定に使用した変位センサ13からの出力値や当該出力値に基づいて取得した変位については、記憶部14に記憶させることなく消去する(あるいは、一時的に記憶させた後、疲労損傷データの算定後に消去する)。
【0047】
算定部18aは、このように算定した各種の疲労損傷データを、記憶部14の記憶領域1に記憶する(SC6)。ただし、ここでは疲労損傷データの記憶をサンプリング間隔Tで行うこととしているので、算定部18aは、当該サンプリング間隔Tの到来有無を判定し(SC5)、サンプリング間隔Tが到来した場合にのみ(SC5、Yes)、疲労損傷データの記憶を行う。以降、これらSC1からSC6を繰り返し、サンプリング間隔Tが到来する毎に、疲労損傷データが記憶部14に記憶される。
【0048】
この疲労損傷データの記憶は、第1記憶領域の先頭レコードから順に行い、第1記憶領域の最後尾レコードへの記憶が終了した後には、再び先頭レコードに戻って上書きを行う。また、第1記憶領域には所定のヘッダ情報を付加することができ、このヘッダ情報はSC6を行う毎に必要に応じて更新することができる。このヘッダ情報としては、例えば、その時点において最後に疲労損傷データを記憶させたレコードのアドレス、当該最後の疲労損傷データを記憶させた時刻、及び記憶部14に記憶させた識別情報を含めることができる。最後に疲労損傷データを記憶させたレコードのアドレスは、次に疲労損傷データを記憶させる際において記憶位置を特定するために参照される。最後の疲労損傷データを記憶させた時刻は、計時部17から取得した時刻を記憶する。識別情報は、疲労損傷データの取得元を疲労損傷評価装置20において特定する際に参照される。
【0049】
一方、算定部18aは、図5のSC3において時刻歴記憶フラグが設定されていると判定した場合(SC3、Yes)、時刻歴データを記憶部14の第2記憶領域に記憶する(SC7)。具体的には、SC4と同様に、変位センサ13からの出力値に基づいて取得した変位と、計時部17から取得した現在時刻とを、相互に対応付けて第2記憶領域に記憶する。この記憶は、第2記憶領域の先頭から行うが、第2記憶領域が一杯になった場合には(SC8、Yes)、時刻歴データを上書きすることなく、記憶部14の時刻歴記憶フラグをOFFにすることによってその後の時刻歴データの記憶を停止し(SC9)、SC4に移行する。
【0050】
(処理−疲労損傷データ送信要求処理)
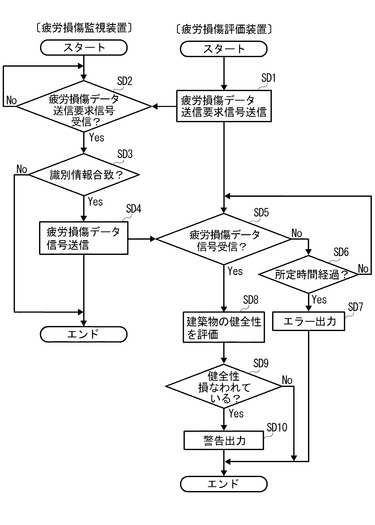
次に、疲労損傷データ送信要求処理について説明する。この疲労損傷データ送信要求処理は、疲労損傷監視装置10から疲労損傷評価装置20に疲労損傷データを送信する処理である。この疲労損傷データ送信要求処理のフローチャートを図7に示す。管理者は、疲労損傷評価装置20の入力部21を介した所定方法により疲労損傷データの送信を指示する。疲労損傷評価装置20の制御部25は、所定形式の疲労損傷データ送信要求信号を送受信部24を介して疲労損傷監視装置10に無線送信する(SD1)。この疲労損傷データ送信要求信号には、疲労損傷データの送信要求対象とする疲労損傷監視装置10の識別情報を含める。
【0051】
疲労損傷監視装置10の制御部18は、疲労損傷データ送信要求信号を送受信部15を介して受信すると(SD2、Yes)、リセット処理と同様に識別情報の合致を確認した後(SD3、Yes)、その時点において記憶部14の第1記憶領域に記憶されている全ての疲労損傷データとヘッダ情報を含んだ疲労損傷データ信号を、送受信部15を介して疲労損傷評価装置20に送信する(SD4)。
【0052】
疲労損傷評価装置20の制御部25は、疲労損傷データ送信要求信号に含めたものと同一の識別情報を含んだ疲労損傷データ信号の受信を確認し(SD5)、疲労損傷データ送信要求信号の送信から所定時間以上経過しても、当該疲労損傷データ信号を受信しない場合には(SD5、No)(SD6、Yes)、エラー出力を出力部22を介して行うことで(SD7)、管理者に異常発生を報知する。一方、所定時間以上経過する前に疲労損傷データ信号を送受信部24を介して受信した場合(SD5、Yes)、制御部25は、この疲労損傷データ信号に含まれる疲労損傷データとヘッダ情報を記憶部23に記憶すると共に、この疲労損傷データを健全性評価部25aに出力する。
【0053】
健全性評価部25aは、疲労損傷データに基づいて建築物の健全性を評価する(SD8)。例えば、変位累積値や変位最大値を記憶部23に予め記憶させた閾値と比較し、これら変位累積値や変位最大値が閾値を越えている場合には、建築物の健全性が損なわれているものと判定する(変位累積値により疲労判定を行ない、変位最大値による損傷判定を行なう)。あるいは、疲労損傷値を、マイナー則において建築物の寿命を示す基準値(=1)と比較し、疲労損傷値が基準値に対して所定範囲以内である場合には、建築物の健全性が損なわれているものと判定する。そして健全性評価部25aは、建築物の健全性が損なわれているものと判定した場合(SD9、Yes)、健全性が損なわれている旨の所定の警告出力を出力部22を介して行うことで、管理者に報知する(SD10)。
【0054】
(処理−時刻歴データ送信要求処理)
最後に、時刻歴データ送信要求処理について説明する。この時刻歴データ送信要求処理は、疲労損傷監視装置10から疲労損傷評価装置20に時刻歴データを送信する処理である。この時刻歴データ送信要求処理のフローチャートを図8に示す。ただし、この処理におけるSE1からSE7は、上述した図7のSD1からSD7の説明において、「疲労損傷データ」を「時刻歴データ」に読み替えると共に、「第1記憶領域」を「第2記憶領域」に読み替えたものと同様であるため、その説明を省略する。所定時間以上経過する前に時刻歴データ信号を送受信部24を介して受信した場合(SE5、Yes)、制御部25は、この時刻歴データ信号に含まれる時刻歴データとヘッダ情報を記憶部23に記憶する(SE8)。このように記憶された時刻歴データ等は、例えば管理者が建築物の健全性の毀損の進行状態を確認する際に参照される。
【0055】
(効果)
このように本実施の形態に係る疲労損傷監視装置10によれば、疲労損傷値を算定して疲労損傷評価装置20に出力するので、この疲労損傷値を用いて、疲労と損傷を統合した総合的な評価を行うことが可能となり、建築物の健全性評価の信頼性を向上させることが可能となる。
【0056】
また、疲労損傷値に加えて、変位累積値及び変位最大値を算定して疲労損傷評価装置20に出力するので、疲労損傷値に併せて変位累積値及び変位最大値を用いて建築物の健全性評価を行うことが可能となり、一層信頼性の高い健全性評価を行うことが可能となる。
【0057】
また、変位センサ13にて測定された変位に基づく算定を行った後、当該算定に用いた変位を疲労損傷監視装置10の記憶部14から消去するので、疲労損傷監視装置10における記憶部14の記憶容量を低減できるため、疲労損傷監視装置10の小型化や低コスト化を図ることができ、また疲労損傷評価装置20へのデータ通信量を削減することで、データ通信に要する電力や時間を低減できる。
【0058】
また、送受信部15を無線通信手段としたので、例えば疲労損傷監視装置10を評価対象となる建築物に設置した後、この疲労損傷監視装置10の周囲を仕上げ材等で覆うことで当該疲労損傷監視装置10への直接的なアクセスが困難になった場合であっても、疲労損傷値等を容易に取得することが可能となる。
【0059】
〔実施の形態に対する変形例〕
以上、本発明に係る一実施の形態について説明したが、本発明の具体的な構成及び手段は、特許請求の範囲に記載した各発明の技術的思想の範囲内において、任意に改変及び改良することができる。以下、このような変形例について説明する。
【0060】
(解決しようとする課題や発明の効果について)
まず、発明が解決しようとする課題や発明の効果は、前記した内容に限定されるものではなく、本発明によって、前記に記載されていない課題を解決したり、前記に記載されていない効果を奏することもでき、また、記載されている課題の一部のみを解決したり、記載されている効果の一部のみを奏することがある。
【0061】
(データ収集のトリガについて)
上記実施の形態では、所定のサンプリング間隔に基づいて疲労損傷データや時刻歴データを記憶部14に記憶させているが、他のトリガに基づいて記憶を行ってもよい。例えば、地震による揺れが検知された場合に、所定時間(例えば数分間)のみ疲労損傷データを記憶部14に記憶させるようにしてもよく、この場合には、記憶部14の記憶容量を一層低減できる。地震による揺れは、センサモジュール11に地震センサを追加してもよいが、変位センサ13からの出力に基づいて算定された変位を微分することで加速度を算定し、当該算定した加速度に基づいて地震の有無を判定するようにしてもよく、この場合にはセンサの数を低減できる点で好ましい。
【0062】
(データ出力のトリガについて)
上記実施の形態では、疲労損傷データ送信要求信号を受信した場合や、時刻歴データ要求信号を受信した場合に、疲労損傷データや時刻歴データを疲労損傷監視装置10から疲労損傷評価装置20に送信しているが、他のトリガに基づいて送信を行ってもよい。例えば、記憶部14に疲労損傷値の閾値を予め記憶させておき、疲労損傷値を算定する毎に、当該算定した疲労損傷値を閾値と比較し、疲労損傷値が閾値を超える場合には、疲労損傷監視装置10が能動的に疲労損傷値を送信するようにしてもよい。この場合には、疲労損傷データ送信要求信号の受信を待つことなく疲労損傷値を送信できるので、建築物の健全性評価を一層迅速に行うことができる。
【図面の簡単な説明】
【0063】
【図1】本発明の実施の形態に係る疲労損傷監視システムを模式的に示す説明図である。
【図2】疲労損傷監視装置と疲労損傷評価装置を機能概念的に示すブロック図である。
【図3】リセット処理のフローチャートである。
【図4】時刻歴記憶開始処理のフローチャートである。
【図5】疲労損傷データ取得処理のフローチャートである。
【図6】疲労設計曲線を示す図である。
【図7】疲労損傷データ送信要求処理のフローチャートである。
【図8】時刻歴データ送信要求処理のフローチャートである。
【符号の説明】
【0064】
1 疲労損傷監視システム
10 疲労損傷監視装置
11 センサモジュール
12 データ収集モジュール
13 変位センサ
14、23 記憶部
15、24 送受信部
16 電源部
17 計時部
18、25 制御部
18a 算定部
20 疲労損傷評価装置
21 入力部
22 出力部
25a 健全性評価部
100 ダンパー
【技術分野】
【0001】
本発明は、建築物の疲労損傷の監視を行う疲労損傷監視装置に関する。
【背景技術】
【0002】
従来、各種の建築物の健全性監視(ヘルスモニタリング)を行うため、様々な装置が提案されている。例えば、建築物の所定位置に設置した最大値記憶型センサと、この最大値記憶型センサに接続されたRFセンサタグを備える建築物の状態検査システムが提案されている。このシステムでは、最大値記憶型センサを用いて変位や歪みを測定し、これら変位や歪みをRFセンサタグが取得し、このRFセンサタグにおいて、現時点における建築物の状態量の最大値と建築物の状態量の許容値とを比較して、建築物の健全性を評価していた(例えば特許文献1参照。特に健全性評価方法は段落0012参照)。
【0003】
また、建築物に加速度センサを設置し、このセンサで計測した加速度を、当該センサと同一基板上のCPU(Central Processing Unit)で加速度のゼロクロス点数、加速度最大値、及び振幅累積値に変換し、これら変換後の各値を、中継局を介して親局に送信するシステムが開示されている(例えば非特許文献1参照)。さらに、この非特許文献1に記載のシステムによれば、計測データの加速度最大値等の損傷指標への変換を加速度センサの内部で行うことで、加速度センサから外部装置へのデータ転送量を低減することが可能となっている。
【0004】
【特許文献1】特開2005−207867号公報
【非特許文献1】圓幸史朗、池ヶ谷靖、中村充、柳瀬高仁、「スマートセンサと無線ネットワークを用いた構造ヘルスモニタリングシステムの開発」、日本地震工学会論文集、第7巻、第6号、2007
【発明の開示】
【発明が解決しようとする課題】
【0005】
ここで、建築物の健全性評価においては、建築物の疲労と損傷の両側面を評価することが好ましい。しかしながら、特許文献1に記載のシステムでは、現時点における建築物の状態量の最大値のみを用いて建築物の健全性を評価していたので、建築物の損傷をある程度は評価できるものの、繰り返し応力等による建築物の疲労を評価することはできず、信頼性の高い健全性評価を行うことはできなかった。
【0006】
一方、非特許文献1に記載のシステムによれば、加速度最大値に加えて振幅累積値を用いて建築物の健全性を評価していたので、建築物の疲労についてもある程度の評価を行うことが可能となる。しかしながら、この非特許文献1に記載のシステムでは、加速度最大値や振幅累積値を単に個別的に取り扱っており、疲労と損傷を統合した総合的な評価は行っていなかったので、依然として信頼性に欠けるものであった。
【0007】
また、信頼性の高い健全性評価を行うためには、センサのサンプリング周期を短くすることが好ましく、センサによって多量のデータが取得されることになる。このため、非特許文献1に記載されているように、単に損傷指標への変換を加速度センサの内部で行うこととしても、加速度センサの内部に多量のデータを記憶する記憶領域を確保する必要が生じることには変わりがなく、建築物の健全性を長期間に渡って評価するためには、加速度センサが大型化するといった問題が生じる。
【0008】
本発明は、上記に鑑みてなされたものであって、信頼性の高い健全性評価を簡易かつ小型の装置で行うことができる、建築物の疲労損傷監視装置を提供することを目的とする。
【課題を解決するための手段】
【0009】
上述した課題を解決し、目的を達成するために、請求項1に記載の建築物の疲労損傷監視装置は、疲労損傷の評価対象となる建築物に取り付けられる装置であって、前記建築物の変位を測定する変位測定手段と、前記建築物の疲労損傷値を記憶する記憶手段と、前記変位測定手段にて測定された変位に基づいて前記疲労損傷値を算定し、当該算定した疲労損傷値を前記記憶手段に記憶させる算定手段と、前記記憶手段に記憶された前記疲労損傷値を所定の外部機器に出力する出力手段とを備えることを特徴とする。
【0010】
請求項2に記載の建築物の疲労損傷監視装置は、請求項1に記載の建築物の疲労損傷監視装置において、前記記憶手段は、変位累積値及び変位最大値を記憶し、前記算定手段は、前記変位測定手段にて測定された変位に基づいて前記変位累積値、前記変位最大値、及び前記疲労損傷値を算定し、当該算定した変位累積値、変位最大値、及び疲労損傷値を前記記憶手段に記憶させ、前記出力手段は、前記記憶手段に記憶された前記変位累積値、前記変位最大値、及び前記疲労損傷値を前記外部機器に出力することを特徴とする。
【0011】
請求項3に記載の建築物の疲労損傷監視装置は、請求項1又は2に記載の建築物の疲労損傷監視装置において、前記記憶手段は、前記変位測定手段にて測定された変位を記憶し、前記算定手段は、前記変位測定手段にて測定された変位に基づく算定を行った後、当該算定に用いた変位を前記記憶手段から消去することを特徴とする。
【0012】
請求項4に記載の建築物の疲労損傷監視装置は、請求項1から3のいずれか一項に記載の建築物の疲労損傷監視装置において、前記出力手段は、無線通信手段であることを特徴とする。
【発明の効果】
【0013】
請求項1に記載の建築物の疲労損傷監視装置によれば、疲労損傷値を算定して外部機器に出力するので、この疲労損傷値を用いて、疲労と損傷を統合した総合的な評価を行うことが可能となり、建築物の健全性評価の信頼性を向上させることが可能となる。
【0014】
また、請求項2に記載の建築物の疲労損傷監視装置によれば、疲労損傷値に加えて、変位累積値及び変位最大値を算定して外部機器に出力するので、疲労損傷値に併せて変位累積値及び変位最大値を用いて建築物の健全性評価を行うことが可能となり、一層信頼性の高い健全性評価を行うことが可能となる。
【0015】
また、請求項3に記載の建築物の疲労損傷監視装置によれば、変位測定手段にて測定された変位に基づく算定を行った後、当該算定に用いた変位を記憶手段から消去するので、疲労損傷監視装置における記憶容量を低減できるため、疲労損傷監視装置の小型化や低コスト化を図ることができ、また外部機器へのデータ通信量を削減することで、データ通信に要する電力や時間を低減できる。
【0016】
また、請求項4に記載の建築物の疲労損傷監視装置によれば、出力手段を無線通信手段としたので、例えば疲労損傷監視装置を評価対象となる建築物に設置した後、この疲労損傷監視装置の周囲を仕上げ材等で覆うことで当該疲労損傷監視装置への直接的なアクセスが困難になった場合であっても、疲労損傷値等を容易に取得することが可能となる。
【発明を実施するための最良の形態】
【0017】
〔実施の形態〕
以下に添付図面を参照して、この発明に係る建築物の疲労損傷監視装置の一実施の形態を詳細に説明する。ただし、この実施の形態によって本発明が限定されるものではない。
【0018】
(構成)
最初に、本実施の形態に係る疲労損傷監視システムの構成について説明する。図1は本実施の形態に係る疲労損傷監視システムを模式的に示す説明図である。この疲労損傷監視システム1は、疲労損傷監視装置10と疲労損傷評価装置20を備えて構成されている。
【0019】
疲労損傷監視装置10は、疲労損傷の評価対象となる建築物に取り付けられ、この建築物における各種のデータの測定から解析までを行う。建築物の具体的種類は任意であるが、ここでは、免震装置を備える建築物を対象とし、この免震装置のダンパー100に疲労損傷監視装置10が取り付けられているものとする。このように免震装置や制振装置が取り付けられた建築物においては、これら免震装置や制振装置のダンパー100に荷重が集中する構造となっているため、これらダンパー100の疲労損傷を監視することにより、建築物の健全性を確実に効率よく評価することが可能となる。
【0020】
一方、疲労損傷評価装置20は、疲労損傷監視装置10から出力された各種のデータに基づいて、建築物の疲労損傷を評価する。
【0021】
(構成−疲労損傷監視装置)
図2は、疲労損傷監視装置10と疲労損傷評価装置20を機能概念的に示すブロック図である。疲労損傷監視装置10は、センサモジュール11とデータ収集モジュール12を備えて構成されている。これらセンサモジュール11とデータ収集モジュール12は、相互に同一の筐体に収容されており、内部バスにて電気的に接続されてスマートセンサを構成する。ただし、これらセンサモジュール11とデータ収集モジュール12を相互に分離した上で有線又は無線にて相互に接続し、センサモジュール11のみをダンパー100に取り付けてもよい。
【0022】
(構成−疲労損傷監視装置−センサモジュール)
まず、センサモジュール11の構成について説明する。このセンサモジュール11は、具体的には変位センサ13を備える。この変位センサ13は、建築物の変位(免震装置のダンパー100の走行距離)を測定する変位測定手段であり、例えば、歪みセンサ、接触式変位センサ、超音波式変位センサ、光変位センサ、あるいはポテンショメータを用いることができる。なお、本実施の形態では、変位センサ13にて測定された変位に基づいて地震による加速度を算定することとしているが、加速度センサを別途設けてもよく、あるいは、センサモジュール11には、これら歪み及び加速度以外の物理量を測定するセンサを付加してもよく、例えば温度センサを設けてもよい。
【0023】
(構成−疲労損傷監視装置−データ収集モジュール)
次に、データ収集モジュール12の構成について説明する。このデータ収集モジュール12は、記憶部14、送受信部15、電源部16、計時部17、及び制御部18を備える。
【0024】
記憶部14は、センサモジュール11にて測定された変位、変位最大値、及び疲労損傷値の如き各種のデータを記憶する記憶手段であり、その具体的構成は任意であるが、例えばRAM(Random Access Memory)やフラッシュメモリを用いて構成される。ここでは、記憶部14の記憶領域として、第1記憶領域と第2記憶領域を設けており、第1記憶領域には疲労損傷データ(変位累積値、変位最大値、及び疲労損傷値)を記憶し、第2記憶領域には時刻歴データ(変位を、その測定時刻と対応付けたデータ)を記憶する。また、記憶部14は、疲労損傷監視装置10を一意に識別するための識別情報、時刻歴データの記憶の要否を特定するための時刻歴記憶フラグ、及び疲労設計曲線を記憶する。識別情報及び疲労設計曲線は任意の方法で記憶部14に予め記憶され、時刻歴記憶フラグは後述する時刻歴記憶開始処理で設定される。
【0025】
送受信部15は、疲労損傷評価装置20からの送信要求信号を受信し、疲労損傷評価装置20に対して記憶部14に記憶されたデータを送信するものであって、特許請求の範囲における出力手段に対応する。この送受信部15は、疲労損傷評価装置20との間で有線にて通信を行う有線通信手段として構成することもできるが、ここでは、疲労損傷評価装置20との有線接続が困難な環境下で遠隔的に送受信を行うことを想定しているため、送受信部15は無線通信を行う無線通信手段として構成されている。この無線通信手段としての送受信部15の具体的構成は任意であるが、例えば、図示しない送受信変換部及びアンテナを備えて構成されている。
【0026】
電源部16は、データ収集モジュール12の各部に電力を供給する電源手段である。この電源部16は、商用電源から電力を受電してデータ収集モジュール12の各部に配電する受配電手段として構成することもできるが、ここでは、商用電源が存在しない環境下で疲労損傷監視装置10を使用することを想定しているため、電源部16として、例えばボタン型のリチウム電池が採用されている。
【0027】
計時部17は、現在の時刻情報を公知の方法で取得して制御部18に出力する計時手段である。
【0028】
制御部18は、データ収集モジュール12の各部を制御する制御手段であり、例えば、CPUと、このCPU上で解析実行される各種のプログラムにより構成される(制御部25において同じ)。この制御部18は、機能概念的に算定部18aを備える。この算定部18aは、特許請求の範囲における算定手段に対応するものであり、その具体的機能については後述する。この算定部18aは、疲労損傷監視プログラムをネットワークや任意の記憶媒体を介してデータ収集モジュール12にインストールすることにより構成される。
【0029】
(構成−疲労損傷評価装置)
次に、疲労損傷評価装置20の構成について説明する。図2に示すように、疲労損傷評価装置20は、入力部21、出力部22、記憶部23、送受信部24、及び制御部25を備える。
【0030】
入力部21は、疲労損傷評価装置20に対する任意の情報を入力するための入力手段であり、例えば、図示しないキーボードやマウスによって構成されている。
【0031】
出力部22は、疲労損傷評価装置20から任意の情報を出力するための出力手段であり、例えば、図示しないディスプレイやスピーカによって構成されている。
【0032】
記憶部23は、データ収集モジュール12から送信されたデータを記憶する記憶手段であり、その具体的構成は任意であるが、例えばHD(Hard Disk)の如き不揮発性記憶媒体を用いて構成される。
【0033】
送受信部24は、データ収集モジュール12に対して送信要求信号を送信し、疲労損傷評価装置20から送信されたデータを受信する送受信手段である。この送受信部24は、データ収集モジュール12の送受信部15と同様に、有線にて通信を行う有線通信手段として構成することもできるが、ここでは、無線通信を行う無線通信手段として構成されており、例えば、図示しない送受信変換部及びアンテナを備えて構成されている。
【0034】
制御部25は、疲労損傷評価装置20の各部を制御する制御手段である。この制御部25は、機能概念的に健全性評価部25aを備える。この健全性評価部25aの具体的機能については後述する。この健全性評価部25aは、健全性評価プログラムをネットワークや任意の記憶媒体を介して疲労損傷評価装置20にインストールすることにより構成される。なお、このデータ収集モジュール12は、実際には公知のパーソナルコンピュータを用いて構成することができる。
【0035】
(処理)
次に、このように構成された疲労損傷監視システム1における疲労損傷監視処理について説明する。この疲労損傷監視処理は、リセット処理、時刻歴記憶開始処理、疲労損傷データ取得処理、疲労損傷データ送信要求処理、及び時刻歴データ送信要求処理に大別される。
【0036】
(処理−リセット処理)
最初に、リセット処理について説明する。このリセット処理は、疲労損傷監視装置10の設置後に行われる処理であって、疲労損傷評価装置20からの指示により疲労損傷監視装置10をリセット(初期化)する処理である。このリセット処理のフローチャートを図3に示す。管理者は、疲労損傷評価装置20を疲労損傷監視装置10に対する通信範囲内に配置し(以降の他の処理においても同じ)、入力部21を介した所定方法によりリセットを指示する。疲労損傷評価装置20の制御部25は、所定形式のリセット信号を送受信部24を介して疲労損傷監視装置10に無線送信する(SA1)。このリセット信号には、リセット対象とする疲労損傷監視装置10の識別情報と、現在時刻を示す時刻データを含める。例えば、識別情報は、管理者が入力部21を介して入力してもよく、あるいは記憶部23に予め記憶させておいた各疲労損傷監視装置10の識別情報の中から所望の識別情報を管理者が入力部21を介して選択するようにしてもよい(以降の他の処理においても同じ)。時刻データは、疲労損傷評価装置20の図示しない内部時計から取得することができる。
【0037】
疲労損傷監視装置10の制御部18は、リセット信号を送受信部15を介して受信すると(SA2、Yes)、このリセット信号に含まれる識別情報が記憶部14に記憶された識別情報に合致するか否かを判定し(SA3)、合致しない場合には(SA3,No)、何ら処理を行うことなくリセット処理を終了し、合致する場合には(SA3,Yes)、記憶部14の第1記憶領域及び第2記憶領域をクリアすると共に、リセット信号に含まれる時刻データに基づいて計時部17の時刻を修正した後(SA4)、記憶部14に記憶された識別情報を含んだ所定形式のリセット完了信号を送受信部15を介して発信する(SA5)。
【0038】
疲労損傷評価装置20の制御部25は、リセット信号に含めたものと同一の識別情報を含んだリセット完了信号の受信を確認し(SA6)、リセット信号の送信から所定時間以上経過しても、当該リセット完了信号を受信しない場合には(SA6、No)(SA7、Yes)、エラー出力を出力部22を介して行うことで(SA8)、管理者に異常発生を報知する。一方、所定時間以上経過する前にリセット完了信号を送受信部24を介して受信した場合(SA6、Yes)、リセット処理を終了する。
【0039】
(処理−時刻歴記憶開始処理)
次に、時刻歴記憶開始処理について説明する。この時刻歴記憶開始処理は、疲労損傷評価装置20からの指示により疲労損傷監視装置10における時刻歴データの記憶を開始させる処理である。この時刻歴記憶開始処理のフローチャートを図4に示す。管理者は、疲労損傷評価装置20の入力部21を介した所定方法により時刻歴データの記憶開始を指示する。疲労損傷評価装置20の制御部25は、所定形式の時刻歴記憶要求信号を送受信部24を介して疲労損傷監視装置10に無線送信する(SB1)。この時刻歴記憶要求信号には、リセット処理と同様に、時刻歴データの記憶開始の指示対象とする疲労損傷監視装置10の識別情報を含める。
【0040】
疲労損傷監視装置10の制御部18は、時刻歴記憶要求信号を送受信部15を介して受信すると(SB2、Yes)、リセット処理と同様に識別情報の合致を確認した後(SB3)、時刻歴記憶フラグが既に記憶部14に設定されているか否かを判定し(SB4)、既に設定されている場合には(SB4、Yes)、何ら処理を行うことなくリセット処理を終了し、未だ設定されていない場合には(SB4、No)、記憶部14の第2記憶領域をクリアすると共に、この第2記憶領域にヘッダ情報を記憶させる(SB5)。このヘッダ情報としては、例えば、計時部17から取得した現在時刻を時刻歴データの記憶開始時間として含めたり、時刻歴データのサンプリング間隔ΔTを含めることができる。次いで、制御部18は、記憶部14に時刻歴記憶フラグを設定し(SB6)、記憶部14に記憶された識別情報を含んだ所定形式の時刻歴記憶開始完了信号を送受信部15を介して発信する(SB7)。
【0041】
疲労損傷評価装置20の制御部25は、時刻歴記憶要求信号に含めたものと同一の識別情報を含んだ時刻歴記憶開始完了信号の受信を確認し(SB8)、時刻歴記憶要求信号の送信から所定時間以上経過しても、当該時刻歴記憶開始完了信号を受信しない場合には(SB8、No)(SB9、Yes)、エラー出力を出力部22を介して行うことで(SB10)、管理者に異常発生を報知する。一方、所定時間以上経過する前に時刻歴記憶開始完了信号を送受信部24を介して受信した場合(SB8、Yes)、時刻歴記憶開始処理を終了する。
【0042】
(処理−疲労損傷データ取得処理)
次に、疲労損傷データ取得処理について説明する。この疲労損傷データ取得処理は、疲労損傷監視装置10において各種のデータの収集及び算定を行う処理である。この疲労損傷データ取得処理のフローチャートを図5に示す。この処理では、所定のサンプリング間隔T(例えば100Hzや200Hz)による割り込み処理によって疲労損傷データの記憶を行い、所定のサンプリング間隔ΔT(<T)による割り込み処理によって時刻歴データの記憶を行う。ただし、時刻歴データの記憶は、上述した時刻歴記憶開始処理によって記憶部14に時刻歴記憶フラグが設定されている場合にのみ実行される。
【0043】
具体的には、算定部18aは、サンプリング間隔ΔTの到来の有無を監視し(SC1)、サンプリング間隔ΔTが到来した場合には(SC1、Yes)、センサモジュール11の変位センサ13からの出力値(例えば16bitの電圧値)を取得する(SC2)。次いで、算定部18aは、記憶部14に時刻歴記憶フラグが設定されているか否かを判定し(SC3)、設定されていない場合には(SC3、No)、SC2で取得した出力値に基づいて疲労損傷データを所定方法にて算定する(SC4)。
【0044】
例えば、算定部18aは、変位センサ13からの出力値に所定の校正値を乗ずることで、当該出力値を物理量(すなわち免震装置のダンパー100の走行距離=変位)に変換して変位を得る。また、算定部18aは、当該取得した変位を、その時点において記憶部14の第1記憶領域に記憶されている変位累積値に加算することで、変位累積値を更新する(第1回目の処理では当該取得した変位を変位累積値とする)。また、算定部18aは、当該取得した変位を、その時点において第1記憶領域に記憶されている変位最大値と比較し、当該取得した変位が変位最大値より大きい場合には、当該取得した変位で変位最大値を上書きすることで、変位最大値を更新する。なお、変位最大値としては、変位ゼロを基準としてプラス側の最大値とマイナス側の最大値を取得する。
【0045】
さらに、算定部18aは、当該取得した変位に基づいて疲労損傷値を算定する。ここで、疲労損傷値とは、評価対象の疲労と損傷を統合した総合的な評価指標であり、例えば、マイナー則(累積損傷則:Miner’s Rule)によって算定する。マイナー則とは、金属部材の疲労損傷を評価する手法の一つであり、一定振幅の繰り返し荷重下での疲労試験の結果を元に、評価対象(ここではダンパー100)の歪み振幅と損傷に至るまでの加力回数との関係を示す疲労曲線を予め求め、この疲労曲線を用いて、実際に生ずる変動歪み振幅に対する累積的な疲労損傷を評価する手法である。例えば、繰り返し歪み振幅εと、評価対象が損傷する疲労寿命回数Nを用いた場合、疲労設計曲線は図6に示すように表され、この関係式はb=log(ε+Na)となる。ここで、図6におけるε0は疲労損傷に寄与する歪み振幅の下限値であり、この下限値以下の歪み振幅については疲労照査の必要がないことを示す。また、疲労損傷値Dは、各歪み振幅εiの繰り返し回数niを以下の式で累積することで算出される。ここで、Niは歪み振幅εiでの疲労寿命回数である。
D=Σ(ni/Ni)・・・式(1)
【0046】
より具体的には、算定部18aは、変位センサ13からの出力値に基づいて取得した変位が、予め決定された歪み振幅の下限値ε0以下であるか否かを判定し、下限値ε0以下である場合には、当該取得した変位に基づく疲労損傷値の算出は行わず、下限値ε0を超える場合には、当該取得した変位に基づいて疲労損傷値の算出を行う。この算出や更新では、当該取得した変位(マイナー則における歪み振幅)と、記憶部14に予め記憶された疲労設計曲線とに基づいて、式(1)におけるni/Niを算定し、このni/NiをSC4を繰り返す毎に累積することで、式(1)における疲労損傷値Dを算出する。ここで、算定部18aは、疲労損傷データを記憶部14の第1記憶領域に記憶する際、当該疲労損傷データの算定に使用した変位センサ13からの出力値や当該出力値に基づいて取得した変位については、記憶部14に記憶させることなく消去する(あるいは、一時的に記憶させた後、疲労損傷データの算定後に消去する)。
【0047】
算定部18aは、このように算定した各種の疲労損傷データを、記憶部14の記憶領域1に記憶する(SC6)。ただし、ここでは疲労損傷データの記憶をサンプリング間隔Tで行うこととしているので、算定部18aは、当該サンプリング間隔Tの到来有無を判定し(SC5)、サンプリング間隔Tが到来した場合にのみ(SC5、Yes)、疲労損傷データの記憶を行う。以降、これらSC1からSC6を繰り返し、サンプリング間隔Tが到来する毎に、疲労損傷データが記憶部14に記憶される。
【0048】
この疲労損傷データの記憶は、第1記憶領域の先頭レコードから順に行い、第1記憶領域の最後尾レコードへの記憶が終了した後には、再び先頭レコードに戻って上書きを行う。また、第1記憶領域には所定のヘッダ情報を付加することができ、このヘッダ情報はSC6を行う毎に必要に応じて更新することができる。このヘッダ情報としては、例えば、その時点において最後に疲労損傷データを記憶させたレコードのアドレス、当該最後の疲労損傷データを記憶させた時刻、及び記憶部14に記憶させた識別情報を含めることができる。最後に疲労損傷データを記憶させたレコードのアドレスは、次に疲労損傷データを記憶させる際において記憶位置を特定するために参照される。最後の疲労損傷データを記憶させた時刻は、計時部17から取得した時刻を記憶する。識別情報は、疲労損傷データの取得元を疲労損傷評価装置20において特定する際に参照される。
【0049】
一方、算定部18aは、図5のSC3において時刻歴記憶フラグが設定されていると判定した場合(SC3、Yes)、時刻歴データを記憶部14の第2記憶領域に記憶する(SC7)。具体的には、SC4と同様に、変位センサ13からの出力値に基づいて取得した変位と、計時部17から取得した現在時刻とを、相互に対応付けて第2記憶領域に記憶する。この記憶は、第2記憶領域の先頭から行うが、第2記憶領域が一杯になった場合には(SC8、Yes)、時刻歴データを上書きすることなく、記憶部14の時刻歴記憶フラグをOFFにすることによってその後の時刻歴データの記憶を停止し(SC9)、SC4に移行する。
【0050】
(処理−疲労損傷データ送信要求処理)
次に、疲労損傷データ送信要求処理について説明する。この疲労損傷データ送信要求処理は、疲労損傷監視装置10から疲労損傷評価装置20に疲労損傷データを送信する処理である。この疲労損傷データ送信要求処理のフローチャートを図7に示す。管理者は、疲労損傷評価装置20の入力部21を介した所定方法により疲労損傷データの送信を指示する。疲労損傷評価装置20の制御部25は、所定形式の疲労損傷データ送信要求信号を送受信部24を介して疲労損傷監視装置10に無線送信する(SD1)。この疲労損傷データ送信要求信号には、疲労損傷データの送信要求対象とする疲労損傷監視装置10の識別情報を含める。
【0051】
疲労損傷監視装置10の制御部18は、疲労損傷データ送信要求信号を送受信部15を介して受信すると(SD2、Yes)、リセット処理と同様に識別情報の合致を確認した後(SD3、Yes)、その時点において記憶部14の第1記憶領域に記憶されている全ての疲労損傷データとヘッダ情報を含んだ疲労損傷データ信号を、送受信部15を介して疲労損傷評価装置20に送信する(SD4)。
【0052】
疲労損傷評価装置20の制御部25は、疲労損傷データ送信要求信号に含めたものと同一の識別情報を含んだ疲労損傷データ信号の受信を確認し(SD5)、疲労損傷データ送信要求信号の送信から所定時間以上経過しても、当該疲労損傷データ信号を受信しない場合には(SD5、No)(SD6、Yes)、エラー出力を出力部22を介して行うことで(SD7)、管理者に異常発生を報知する。一方、所定時間以上経過する前に疲労損傷データ信号を送受信部24を介して受信した場合(SD5、Yes)、制御部25は、この疲労損傷データ信号に含まれる疲労損傷データとヘッダ情報を記憶部23に記憶すると共に、この疲労損傷データを健全性評価部25aに出力する。
【0053】
健全性評価部25aは、疲労損傷データに基づいて建築物の健全性を評価する(SD8)。例えば、変位累積値や変位最大値を記憶部23に予め記憶させた閾値と比較し、これら変位累積値や変位最大値が閾値を越えている場合には、建築物の健全性が損なわれているものと判定する(変位累積値により疲労判定を行ない、変位最大値による損傷判定を行なう)。あるいは、疲労損傷値を、マイナー則において建築物の寿命を示す基準値(=1)と比較し、疲労損傷値が基準値に対して所定範囲以内である場合には、建築物の健全性が損なわれているものと判定する。そして健全性評価部25aは、建築物の健全性が損なわれているものと判定した場合(SD9、Yes)、健全性が損なわれている旨の所定の警告出力を出力部22を介して行うことで、管理者に報知する(SD10)。
【0054】
(処理−時刻歴データ送信要求処理)
最後に、時刻歴データ送信要求処理について説明する。この時刻歴データ送信要求処理は、疲労損傷監視装置10から疲労損傷評価装置20に時刻歴データを送信する処理である。この時刻歴データ送信要求処理のフローチャートを図8に示す。ただし、この処理におけるSE1からSE7は、上述した図7のSD1からSD7の説明において、「疲労損傷データ」を「時刻歴データ」に読み替えると共に、「第1記憶領域」を「第2記憶領域」に読み替えたものと同様であるため、その説明を省略する。所定時間以上経過する前に時刻歴データ信号を送受信部24を介して受信した場合(SE5、Yes)、制御部25は、この時刻歴データ信号に含まれる時刻歴データとヘッダ情報を記憶部23に記憶する(SE8)。このように記憶された時刻歴データ等は、例えば管理者が建築物の健全性の毀損の進行状態を確認する際に参照される。
【0055】
(効果)
このように本実施の形態に係る疲労損傷監視装置10によれば、疲労損傷値を算定して疲労損傷評価装置20に出力するので、この疲労損傷値を用いて、疲労と損傷を統合した総合的な評価を行うことが可能となり、建築物の健全性評価の信頼性を向上させることが可能となる。
【0056】
また、疲労損傷値に加えて、変位累積値及び変位最大値を算定して疲労損傷評価装置20に出力するので、疲労損傷値に併せて変位累積値及び変位最大値を用いて建築物の健全性評価を行うことが可能となり、一層信頼性の高い健全性評価を行うことが可能となる。
【0057】
また、変位センサ13にて測定された変位に基づく算定を行った後、当該算定に用いた変位を疲労損傷監視装置10の記憶部14から消去するので、疲労損傷監視装置10における記憶部14の記憶容量を低減できるため、疲労損傷監視装置10の小型化や低コスト化を図ることができ、また疲労損傷評価装置20へのデータ通信量を削減することで、データ通信に要する電力や時間を低減できる。
【0058】
また、送受信部15を無線通信手段としたので、例えば疲労損傷監視装置10を評価対象となる建築物に設置した後、この疲労損傷監視装置10の周囲を仕上げ材等で覆うことで当該疲労損傷監視装置10への直接的なアクセスが困難になった場合であっても、疲労損傷値等を容易に取得することが可能となる。
【0059】
〔実施の形態に対する変形例〕
以上、本発明に係る一実施の形態について説明したが、本発明の具体的な構成及び手段は、特許請求の範囲に記載した各発明の技術的思想の範囲内において、任意に改変及び改良することができる。以下、このような変形例について説明する。
【0060】
(解決しようとする課題や発明の効果について)
まず、発明が解決しようとする課題や発明の効果は、前記した内容に限定されるものではなく、本発明によって、前記に記載されていない課題を解決したり、前記に記載されていない効果を奏することもでき、また、記載されている課題の一部のみを解決したり、記載されている効果の一部のみを奏することがある。
【0061】
(データ収集のトリガについて)
上記実施の形態では、所定のサンプリング間隔に基づいて疲労損傷データや時刻歴データを記憶部14に記憶させているが、他のトリガに基づいて記憶を行ってもよい。例えば、地震による揺れが検知された場合に、所定時間(例えば数分間)のみ疲労損傷データを記憶部14に記憶させるようにしてもよく、この場合には、記憶部14の記憶容量を一層低減できる。地震による揺れは、センサモジュール11に地震センサを追加してもよいが、変位センサ13からの出力に基づいて算定された変位を微分することで加速度を算定し、当該算定した加速度に基づいて地震の有無を判定するようにしてもよく、この場合にはセンサの数を低減できる点で好ましい。
【0062】
(データ出力のトリガについて)
上記実施の形態では、疲労損傷データ送信要求信号を受信した場合や、時刻歴データ要求信号を受信した場合に、疲労損傷データや時刻歴データを疲労損傷監視装置10から疲労損傷評価装置20に送信しているが、他のトリガに基づいて送信を行ってもよい。例えば、記憶部14に疲労損傷値の閾値を予め記憶させておき、疲労損傷値を算定する毎に、当該算定した疲労損傷値を閾値と比較し、疲労損傷値が閾値を超える場合には、疲労損傷監視装置10が能動的に疲労損傷値を送信するようにしてもよい。この場合には、疲労損傷データ送信要求信号の受信を待つことなく疲労損傷値を送信できるので、建築物の健全性評価を一層迅速に行うことができる。
【図面の簡単な説明】
【0063】
【図1】本発明の実施の形態に係る疲労損傷監視システムを模式的に示す説明図である。
【図2】疲労損傷監視装置と疲労損傷評価装置を機能概念的に示すブロック図である。
【図3】リセット処理のフローチャートである。
【図4】時刻歴記憶開始処理のフローチャートである。
【図5】疲労損傷データ取得処理のフローチャートである。
【図6】疲労設計曲線を示す図である。
【図7】疲労損傷データ送信要求処理のフローチャートである。
【図8】時刻歴データ送信要求処理のフローチャートである。
【符号の説明】
【0064】
1 疲労損傷監視システム
10 疲労損傷監視装置
11 センサモジュール
12 データ収集モジュール
13 変位センサ
14、23 記憶部
15、24 送受信部
16 電源部
17 計時部
18、25 制御部
18a 算定部
20 疲労損傷評価装置
21 入力部
22 出力部
25a 健全性評価部
100 ダンパー
【特許請求の範囲】
【請求項1】
疲労損傷の評価対象となる建築物に取り付けられる装置であって、
前記建築物の変位を測定する変位測定手段と、
前記建築物の疲労損傷値を記憶する記憶手段と、
前記変位測定手段にて測定された変位に基づいて前記疲労損傷値を算定し、当該算定した疲労損傷値を前記記憶手段に記憶させる算定手段と、
前記記憶手段に記憶された前記疲労損傷値を所定の外部機器に出力する出力手段と、
を備えることを特徴とする建築物の疲労損傷監視装置。
【請求項2】
前記記憶手段は、変位累積値及び変位最大値を記憶し、
前記算定手段は、前記変位測定手段にて測定された変位に基づいて前記変位累積値、前記変位最大値、及び前記疲労損傷値を算定し、当該算定した変位累積値、変位最大値、及び疲労損傷値を前記記憶手段に記憶させ、
前記出力手段は、前記記憶手段に記憶された前記変位累積値、前記変位最大値、及び前記疲労損傷値を前記外部機器に出力すること、
を特徴とする請求項1に記載の建築物の疲労損傷監視装置。
【請求項3】
前記記憶手段は、前記変位測定手段にて測定された変位を記憶し、
前記算定手段は、前記変位測定手段にて測定された変位に基づく算定を行った後、当該算定に用いた変位を前記記憶手段から消去すること、
を特徴とする請求項1又は2に記載の建築物の疲労損傷監視装置。
【請求項4】
前記出力手段は、無線通信手段であること、
を特徴とする請求項1から3のいずれか一項に記載の建築物の疲労損傷監視装置。
【請求項1】
疲労損傷の評価対象となる建築物に取り付けられる装置であって、
前記建築物の変位を測定する変位測定手段と、
前記建築物の疲労損傷値を記憶する記憶手段と、
前記変位測定手段にて測定された変位に基づいて前記疲労損傷値を算定し、当該算定した疲労損傷値を前記記憶手段に記憶させる算定手段と、
前記記憶手段に記憶された前記疲労損傷値を所定の外部機器に出力する出力手段と、
を備えることを特徴とする建築物の疲労損傷監視装置。
【請求項2】
前記記憶手段は、変位累積値及び変位最大値を記憶し、
前記算定手段は、前記変位測定手段にて測定された変位に基づいて前記変位累積値、前記変位最大値、及び前記疲労損傷値を算定し、当該算定した変位累積値、変位最大値、及び疲労損傷値を前記記憶手段に記憶させ、
前記出力手段は、前記記憶手段に記憶された前記変位累積値、前記変位最大値、及び前記疲労損傷値を前記外部機器に出力すること、
を特徴とする請求項1に記載の建築物の疲労損傷監視装置。
【請求項3】
前記記憶手段は、前記変位測定手段にて測定された変位を記憶し、
前記算定手段は、前記変位測定手段にて測定された変位に基づく算定を行った後、当該算定に用いた変位を前記記憶手段から消去すること、
を特徴とする請求項1又は2に記載の建築物の疲労損傷監視装置。
【請求項4】
前記出力手段は、無線通信手段であること、
を特徴とする請求項1から3のいずれか一項に記載の建築物の疲労損傷監視装置。
【図1】



【図2】
【図3】
【図4】
【図5】
【図6】

【図7】
【図8】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【公開番号】特開2010−78370(P2010−78370A)
【公開日】平成22年4月8日(2010.4.8)
【国際特許分類】
【出願番号】特願2008−244691(P2008−244691)
【出願日】平成20年9月24日(2008.9.24)
【出願人】(000003621)株式会社竹中工務店 (1,669)
【Fターム(参考)】
【公開日】平成22年4月8日(2010.4.8)
【国際特許分類】
【出願日】平成20年9月24日(2008.9.24)
【出願人】(000003621)株式会社竹中工務店 (1,669)
【Fターム(参考)】
[ Back to top ]