
発電を制御するためのシステム及び装置
【課題】発電機コントローラを含む発電を制御するためのシステム及び装置を提供する。
【解決手段】コントローラ50は、フィルタ要素204、周波数応答スケジュール要素206、及び速度制限装置要素208を含むことができる。フィルタ要素204は、電力グリッド周波数信号202を受け取り、周波数信号が周波数帯域外であるとき、周波数信号を出力することができる。周波数応答スケジュール要素は、フィルタリングされた周波数信号を使用して最終目標寄与電力を決定することができるが、最終目標寄与電力は、発電機が1次周波数応答において提供すべき最終電力寄与量を表す。速度制限装置要素は、時間と共に変化し、最終目標寄与電力に接近する即時目標寄与電力信号210を決定することができる。したがって、コントローラは、電力グリッド周波数外乱に対する1次周波数応答の接近速度、到達時間などを制御することができる。
【解決手段】コントローラ50は、フィルタ要素204、周波数応答スケジュール要素206、及び速度制限装置要素208を含むことができる。フィルタ要素204は、電力グリッド周波数信号202を受け取り、周波数信号が周波数帯域外であるとき、周波数信号を出力することができる。周波数応答スケジュール要素は、フィルタリングされた周波数信号を使用して最終目標寄与電力を決定することができるが、最終目標寄与電力は、発電機が1次周波数応答において提供すべき最終電力寄与量を表す。速度制限装置要素は、時間と共に変化し、最終目標寄与電力に接近する即時目標寄与電力信号210を決定することができる。したがって、コントローラは、電力グリッド周波数外乱に対する1次周波数応答の接近速度、到達時間などを制御することができる。
【発明の詳細な説明】
【技術分野】
【0001】
本明細書に開示する主題は、概略的には、発電ユニットに関し、より具体的には、発電機を制御するためのシステム及び装置に関する。
【背景技術】
【0002】
発電ユニットは、通常、公称周波数(例えば、50Hz又は60Hz)で電力グリッドに交流を提供する。しかし、時々、電力グリッド周波数は、揺動し、公称周波数から変化する場合がある。例えば、発電ユニットが突然追加され、もしくは電力グリッドから除去されるとき、又は、電力グリッドに接続される負荷が突然追加もしくは除去されるとき、そうした周波数外乱が起こる可能性がある。電力グリッドの安定性を維持するために、発電ユニットは、それに応じて出力を増加又は減少させることにより、周波数外乱に応答することができる。例えば、電力グリッド周波数の変化が、不感帯域周波数として知られる閾値(例えば、最小周波数変化)を超えるとき、個々の発電ユニットは、1次周波数応答を実行し、各発電ユニットにより発生する電力量を周波数変化に比例して増加及び減少させることができる。異なる発電ユニットは、異なる容量及び特性を有する可能性があるので、いくつかの発電ユニットは、周波数変化に応答して出力を迅速に変化させる可能性があるが、他の発電ユニットは、より緩やかに応答する可能性がある。さらに、周波数応答用の、発電ユニットの最終目標寄与電力を制御することができるが、配電時間、速度、及び形状を制御することができない。それに加えて、電力グリッドの安定性を維持するために、電力グリッド周波数外乱に応答して時間と共に特定の出力を提供するように、いくらかのグリッドオペレータを規制することができ、規制に合わない1次周波数応答を提供する発電ユニットの使用を除外することができる。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】米国特許出願公開第2007/0290507号明細書
【発明の概要】
【0004】
特許請求されている当初の発明と範囲が整合するいくつかの実施形態を以下に要約する。これらの実施形態は、特許請求されている発明の範囲を限定するものではなく、むしろ、これらの実施形態は、本発明の可能な形態の概要のみを提供することを意図している。実際、本発明は、以下に記載する実施形態と同様であるか又はそれらと異なる可能性がある様々な形態を含むことができる。
【0005】
第1の実施形態では、発電機コントローラは、電力グリッド周波数信号を受け取り、周波数信号が周波数帯域外であるとき、この周波数信号を出力するように構成されるフィルタ要素を含む。コントローラは、フィルタリングされた周波数信号に少なくとも部分的に基づいて最終目標寄与電力を決定するように構成される周波数応答スケジュール要素をさらに含む。最終目標寄与電力は、発電機が1次周波数応答において提供すべき最終電力寄与量を表す。コントローラは、時間と共に変化し、速度制限スケジュールに少なくとも部分的に基づいて最終目標寄与電力に接近する即時目標寄与電力信号を決定するように構成される可変速度制限装置要素を含む。即時目標寄与電力信号は、発電機が、即時目標寄与電力信号に対応する量だけ発電機により出力される電力を増加又は減少させるようにするように構成される。
【0006】
第2の実施形態では、システムは、トルクを発生させるように構成されるガスタービンと、ガスタービンに結合する発電機とを含む。発電機は、トルクに基づいて電力グリッドに電力を提供するように構成される。システムは、ガスタービンと結合するコントローラも含む。コントローラは、複数の即時目標寄与電力信号の1つに少なくとも部分的に基づき、電力グリッドの周波数信号に対する1次周波数応答として、ガスタービンがトルクを変化させるようにするように構成される。コントローラは、周波数信号を受け取り、周波数信号が周波数帯域外であるとき、この周波数信号を出力するように構成される、1つ又は複数の周波数フィルタを含む。コントローラは、周波数信号を受け取り、それぞれの最終目標寄与電力信号を出力するようにそれぞれが構成される、1つ又は複数の周波数応答スケジュール要素をさらに含む。最終目標寄与電力信号のそれぞれは、発電機が1次周波数応答において提供すべき最終電力寄与量を表す。コントローラは、それぞれの最終目標寄与電力信号を受け取り、速度制限スケジュールに少なくとも部分的に基づいて複数の即時目標寄与電力信号の1つを決定するようにそれぞれが構成される、1つ又は複数の速度制限装置要素を含む。複数の即時目標寄与電力信号のそれぞれは、発電機が、発電機により出力される電力を、この即時目標寄与電力信号により指示されるレベルまで増加又は減少させるようにするように構成される。
【0007】
第3の実施形態では、製造物品は、上にプロセッサ実行可能命令をエンコードした、1つ又は複数の有体の機械読取可能媒体を含む。命令は、電力グリッド周波数信号を受け取る命令と、電力グリッド周波数信号が電力グリッドの公称周波数の周りの不感帯域よりも高いか、又はそれよりも低いかを判定することにより、周波数外乱がいつ起こったかを判定する命令とを含む。命令は、周波数外乱が起こったとき、電力グリッドの公称周波数と電力グリッド周波数信号との間の差に少なくとも部分的に基づいて最終目標寄与電力を決定する命令も含む。最終目標寄与電力は、周波数外乱に対する発電機の1次周波数応答と関連する最終電力寄与量を表す。命令は、周波数応答が起こったとき、最終目標寄与電力及び周波数外乱が起こった後の時間に少なくとも部分的に基づいて、即時目標寄与電力信号を決定する命令を含む。即時目標寄与電力は、周波数外乱に対する発電機の1次周波数応答と関連する即時寄与電力量を表す。最終目標寄与電力、又は即時目標寄与電力、又はその両方を決定する命令は、現時刻、現日付、電力グリッド周波数信号、発電機の現出力、オペレータの嗜好、動作仕様、又は電力グリッドに関連する規則もしくは規制、又はそれらのいくつかの組合せに少なくとも部分的に基づいて変化するように構成される。
【0008】
本発明のこれら及び他の特徴、態様、及び利点は、図面を通して同様の文字が同様の部品を表す、添付の図面を参照して以下の詳細な説明を読めば、より十分に理解されよう。
【図面の簡単な説明】
【0009】
【図1】発電ユニットが汎用性周波数コントローラを含むことができる電気システムの実施形態のブロック図である。
【図2】汎用性周波数コントローラを含むタービン発電機システムの実施形態のブロック図である。
【図3】汎用性周波数コントローラの実施形態の概略図である。
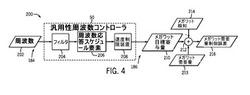
【図4】汎用性周波数コントローラにより使用される制御システムの実施形態を説明する流れ図である。
【図5】汎用性周波数コントローラの周波数応答スケジュールの実施形態の図である。
【図6】汎用性周波数コントローラの速度制限スケジュールの実施形態の図である。
【図7】汎用性周波数コントローラの速度制限スケジュールの別の実施形態の図である。
【図8】汎用性周波数コントローラにより使用される制御システムの別の実施形態の流れ図である。
【発明を実施するための形態】
【0010】
本発明の1つ又は複数の特定の実施形態を以下に説明する。これらの実施形態を簡潔に説明するために、本明細書には、実際の実施形態のすべての特徴部を説明しない可能性がある。任意の工学的プロジェクト又は設計プロジェクトなどの任意の実際の実施形態の開発では、実施形態により変化する可能性がある、システム関連及びビジネス関連の制約との適合などの、開発者の特定の目標を達成するのに、多くの実施形態に固有の決定を行わなければならないことを理解されたい。さらに、そうした開発努力は、複雑で時間がかかる可能性があるが、それでも、本開示の利益を享受する当業者にとっては、設計、加工、及び製造の日常的な仕事であることを理解されたい。
【0011】
本発明の様々な実施形態の要素を紹介するとき、冠詞「a(1つの)」、「an(1つの)」、「the(その)」、及び「said(前記)」は、1つ又は複数の要素が存在することを意味するものとする。用語「comprising(備える)」、「including(含む)」、及び「having(有する)」は、包括的で、列挙した要素以外の付加的な要素が存在する可能性があることを意味するものとする。
【0012】
本実施形態は、電力グリッド周波数信号の変化に応答して、発電機を制御することに関する。具体的には、以下に開示する実施形態は、単なる目標最終出力ではなく、発電機出力の接近速度及び/又は到達時間を制御することを含む可能性がある。これらの実施形態は、適当な任意の発電機を制御することを含む可能性がある。具体的には、いくつかの実施形態は、電力グリッドの周波数外乱に対して比較的感受性が高い可能性があるが、そうした外乱に比較的迅速に応答することもできる、航空機転用タービン発電機などの低慣性発電機の周波数応答を制御することに適用する。本明細書に使用する用語「flexible frequency controller(汎用性周波数コントローラ)」は、周波数応答シーケンス中に、出力の接近速度及び/又は到達時間を制御することができる発電機コントローラを指す。
【0013】
電力グリッドの周波数を公称周波数(例えば、通常50Hz又は60Hz)から変化させる、周波数外乱が電力グリッドで起こるとき、そうした汎用性周波数コントローラにより、発電機は、制御された方法で出力をもたらすことができる。具体的には、公称周波数からの偏差が、不感帯域として知られる最小閾値を上回るとき、汎用性周波数コントローラは、電力グリッドを安定化するために、1次周波数応答を開始することができる。1次周波数応答は、制御された接近速度及び/又は到達時間に応じて、発電機の出力を増加又は減少させることができる。1次周波数応答の後、通常はより長期性の2次周波数応答は、電力グリッド周波数が安定しながら、一定時間、一定の出力を維持することを含むことができる。本開示は、1次周波数応答に焦点を当てる。
【0014】
具体的には、汎用性周波数コントローラは、周波数応答スケジュール、速度制限スケジュール、及び/又は電力需要量制御誤差を使用して、発電機の1次周波数応答を制御することができる。周波数応答スケジュールは、周波数偏差量に応じて、最終目標寄与電力を特定することができる。この最終目標寄与電力は、発電機が1次周波数応答において最終的にもたらすべき、全寄与電力の増加量又は減少量を表す。しかし、発電機が、寄与電力のすべてを直ちにもたらさないように、発電機を、最終目標寄与電力のみに基づいて制御することはできない。むしろ、最終目標寄与電力を決定したとき、周波数外乱が起こった後、最終目標寄与電力及び/又は時間量に基づいて即時目標寄与電力を決定するのに、その際、速度制限スケジュールを使用することができる。即時目標寄与電力は、時間と共に変化し、最終的に最終目標寄与電力に達することができる。即時目標寄与電力を使用して発電機を制御することにより、時間と共に、発電機は、寄与電力を発生させ、寄与電力に制御された接近速度及び/又は到達時間をもたらすことができる。
【0015】
このように、周波数応答スケジュール、速度制限スケジュール、及び/又は電力需要量制御誤差を使用して、汎用性周波数コントローラは、電力グリッドの安定性を改善することができる方法で、周波数外乱に応答することができる。すなわち、電力グリッドの安定性を改善するために、電力グリッドオペレータは、周波数応答が特定の方法で実行されるように要求することができる。例えば、電力グリッドオペレータは、より速い発電機からの電力がより遅い発電機内に逆流するとき、シーソー効果などを防ぐために、周波数外乱中に、すべての発電機が同様の方法で動作するように要求することができる。具体的には、電力グリッドオペレータは、発電機が、一定の時間にわたり、特定の速度で増加又は減少する出力をもたらすように要求することができる。例えば、一実施形態では、所望の出力変化は、線形変化を有する周波数応答スケジュールにより表すことができるが、発電機による可能な最大変化速度は、指数関数的変化により表すことができる。汎用性周波数コントローラは、単に、発電機を可能な最大速度で応答させるのではなく、発電機が周波数変化に応答する速度を制御することができる。
【0016】
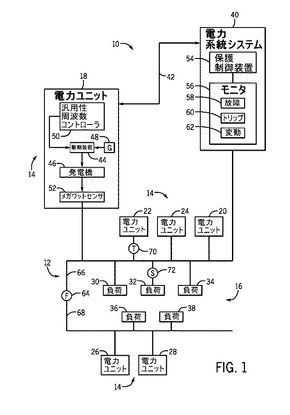
以上を考慮に入れて、図1は、電力グリッド12の周波数ベースの外乱に応答するために、汎用性周波数コントローラを用いて構成することができる電力ユニット14により供給される電力グリッド12を含む電気システム10の実施形態のブロック図である。図示するように、電気システム10は、分散電力ユニット14及び分散負荷16に結合する電力グリッド12を含む。分散電力ユニット14は、電力ユニット18、20、22、24、26、及び28を含むことができる。これらの分散電力ユニット14のそれぞれは、電力グリッド12の分配用の電力を発生させるように構成される。分散負荷16は、負荷30、32、34、36、及び38を含むことができる。これらの分散負荷16のそれぞれは、機械、建築物、及び他のシステムを動作させるために、電力グリッド12から電力を抽出するように構成される。
【0017】
図示する電気システム10は、電力グリッド12に結合する電力系統システム40も含む。電力系統システム40は、電力グリッド12に一定の制御を与えることができ、電力グリッド12内の過渡安定性揺動などの様々なグリッド不安定化現象を検出することができる。これらの過渡安定性揺動は、周波数、又は電力グリッド12にかかる負荷の激しい変化に対応する可能性がある。それに加えて、そうした現象が起こるとき、電力系統システム40は、電力ユニット14の1つ又は複数から電力設備信号42を受け取ることができる。電力設備信号42は、電力ユニット14に関する、状態及び/又はヘルスデータなどのデータを電力オペレータに提供することができる。
【0018】
分散電力ユニット14は、電力グリッド12に電力を分配するように構成される、様々な発電システムを含むことができる。例えば、そうした分散電力ユニット14は、往復動燃焼エンジン、ガスタービンエンジン、蒸気タービンエンジン、水力タービン、風力タービンなどにより駆動される発電機を含むことができる。これらの分散電力ユニット14のサイズは、ユニットにより様々である可能性もある。例えば、ある電力ユニット14は、電力グリッド12に対して、別の電力ユニット14よりも大幅に大きい慣性を有する可能性がある。大きい慣性を有する電力ユニット14は、低慣性の電力ユニット14よりも、周波数変化に応答するのに、より多くの時間がかかる可能性がある。
【0019】
図示する実施形態では、電力ユニット18は、比較的低慣性の電力ユニット14を表し、発電機46に結合する駆動装置44を含む。電力ユニット18は、駆動装置44の比例動作制御をもたらすことができる調速機48も含む。駆動装置44は、調速機48及び/又は他の内部制御機構による制御に応答して、発電用の発電機46を回転させるように構成される。いくつかの実施形態では、駆動装置44は、ガスタービンエンジンなどの低回転慣性エンジンを含むことができる。例えば、駆動装置44は、General Electric Company、Schenectady、New Yorkにより製造される、LM1600、LM2500、LM6000、又はLMS100航空機転用ガスタービンエンジンなどの航空機転用ガスタービンエンジンを含むことができる。しかし、駆動装置44は、発電機46を回転させるのに適した任意の装置とすることができる。以下にさらに詳細に説明するように、駆動装置44は、電力グリッド12にかかる負荷の激しい変化に応答して速度が迅速に変化し、それにより、電力グリッド12に対する発電機46からの出力の周波数の迅速な変化をもたらす可能性がある。
【0020】
分散負荷16は、電力グリッド12に関する、様々な装置及び設備を含むことができる。例えば、分散負荷16は、住宅、商業ビル、工業施設、輸送システム、及び個々の装置を含むことができる。一般に、これらの分散負荷16は、24時間の各周期内で電気需要量を緩やかに変化させる可能性がある。例えば、最大需要量は、通常、真昼に生じるが、最小需要量は、通常、真夜中に生じる可能性がある。1日の間に、これらの分散負荷16による電気需要量は、通常、午前の時間帯に増加し、続いて午後の時間帯に減少する可能性がある。分散電力ユニット14は、通常、電力グリッド12に対する電気需要量のこれらの緩やかな変化に応答することができる。不都合なことに、電力グリッド12にかかる急激な負荷変動は、分散電力ユニット16により供給される電力と、分散負荷16による電気需要量との間の大きい差をもたらす可能性がある。その結果、大きい負荷減少により、電力ユニット14は加速し、それにより、電力グリッド12の周波数を増加させる可能性がある。同様に、大きい負荷増加により、電力ユニットは減速し、それにより、電力グリッド12の周波数を減少させる可能性がある。
【0021】
以下にさらに詳細に説明するように、電力グリッド12の周波数を公称周波数から逸脱させる、そうした周波数ベースのグリッド外乱が起こるとき、駆動装置44は、それに応じて、周波数を増加又は減少させることができる。そうした状態が、不感帯域として知られる最小閾値(例えば、1mHz、2mHz、5mHz、10mHz、20mHzなど)を上回る周波数を含むとき、電力グリッド12を安定化するのを助けることを目的とする、汎用性周波数コントローラ50は、駆動装置44などに制御信号をもたらすことができる。さらに、汎用性周波数コントローラ50は、周波数応答スケジュールに応じて、駆動装置44が発電機46へのトルクを追加又は除去するようにする信号をもたらすことができる。そうすることにより、他の分散電力ユニット14と共同で、電力グリッド12の周波数をその公称周波数に戻すことができる電力を追加又は除去することができる。図示する実施形態では、電力ユニット18内のメガワットセンサ52は、発電機46により発生するメガワットを実時間で監視し、汎用性周波数コントローラ50にフィードバックをもたらすように構成される。
【0022】
それに加えて、図示するように、電力系統システム40は、いくつかのシステム全体の現象を監視するように構成することができる。例えば、電力系統システム40は、保護制御装置54及びグリッドモニタ56を含むことができ、これらは共同で、電力グリッド12全体の様々なグリッド不安定化現象に基づいて、迅速な現象特定及び修正動作をもたらす。例えば、グリッドモニタ56は、故障モニタ58、トリップモニタ60、及び変動モニタ62を含むことができる。故障モニタ58は、電力グリッド12内の送電線故障64などの故障を迅速に特定するように構成することができる。故障64は、電力グリッド12の第1及び第2の部分66及び68の断線を表す可能性がある。その結果、送電線故障64は、電力グリッド12の第1の部分66から、負荷36及び38と、電力ユニット26及び28とを切断する可能性がある。
【0023】
トリップモニタ60は、電力ユニット22のトリップ70などの、分散電力ユニット14の1つ又は複数のトリップを特定するように構成することができる。トリップ70の結果、分散負荷16による電力需要量は、分散電力ユニット14によりもたらされる利用可能な電力を突然上回る可能性がある。変動モニタ62は、負荷32の変動72などの、分散負荷16の1つ又は複数による電気需要量の急激な変化を特定するように構成することができる。例えば、変動72は、ある装置、工業施設などの電気需要量の急激な増加又は減少を表す可能性がある。
【0024】
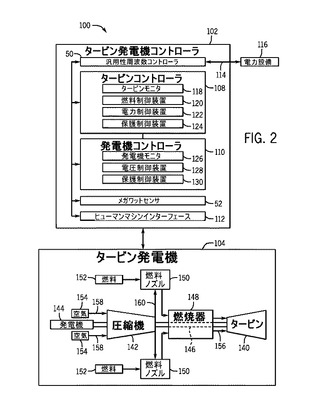
図2は、タービン発電機104に結合するタービン発電機コントローラ102を有するタービン発電機システム100の実施形態のブロック図である。図示するように、タービン発電機コントローラ102は、汎用性周波数コントローラ50、タービンコントローラ108、発電機コントローラ110、メガワットセンサ52、及びヒューマンマシンインターフェース112を含む。以下にさらに詳細に説明するように、汎用性周波数コントローラ50は、1つ又は複数の周波数応答スケジュールなどを使用することなどにより、タービン発電機104に供給される目標電力信号を制御することができる。タービンコントローラ108は、タービンモニタ118、燃料制御装置120、電力制御装置122、及び保護制御装置124などの、様々なモニタ及び制御装置を含むことができる。図示する発電機コントローラ110は、電力設備116(電力設備40など)から電力設備信号114(電力設備信号42など)を受け取ることもでき、発電機モニタ126、電圧制御装置128、及び保護制御装置130などの、様々なモニタ及び制御装置を含むことができる。タービンコントローラ108及び発電機コントローラ110のモニタ及び制御装置は、タービン発電機104のいくつかの特性を監視及び制御するように構成することができる。
【0025】
図示する実施形態では、タービン発電機104は、1つ又は複数のシャフト146を介して圧縮機142及び発電機144に結合するタービン140を含む。理解されるように、図示するタービン140は、1つ又は複数のタービン段を含むことができ、圧縮機142は、1つ又は複数の圧縮機段を含むことができる。タービン発電機104は、燃料152及び空気154の混合物を燃焼し、高温燃焼ガス156をタービン140に供給するように構成される、1つ又は複数の燃焼器148及び燃料ノズル150をさらに含む。具体的には、圧縮機142は、タービン140により駆動され、上流吸気口158で空気154を圧縮し、次いで、1つ又は複数の燃焼器148及び燃料ノズル150に圧縮空気160を供給する。例えば、燃料ノズル150は、燃焼器148に圧縮空気160及び燃料152を燃焼用に適当に混合して送出することができる。
【0026】
次いで、燃料と空気との混合物は、燃焼器148内で燃焼し、それにより、タービン140に流れ込む高温燃焼ガス156を発生させる。高温燃焼ガス156は、シャフト146を回転させるために、タービン140内のタービンブレードを駆動し、それにより、圧縮機142及び発電機144のどちらも駆動する。いくつかの実施形態では、タービンエンジンは、General Electric Company、Schenectady、New Yorkにより製造される、LM1600、LM2500、LM6000、又はLMS100航空機転用ガスタービンエンジンなどの航空機転用ガスタービンエンジンとすることができる。したがって、タービン発電機104は、約14〜100MW、35〜65MW、又は40〜50MWまでの電気を発生させるように構成することができる。例えば、LM2500エンジンは、約18〜35MWまでを発生させるように構成することができ、LM6000エンジンは、約40〜50MWまでを発生させるように構成することができ、LMS100エンジンは、約100MWまでを発生させるように構成することができる。
【0027】
タービン発電機コントローラ102は、タービン発電機104の様々な特性の監視及び制御をもたらす。例えば、タービンコントローラ108のタービンモニタ118は、回転速度、振動、温度、圧力、流量、ノイズ、及びタービン140、圧縮機142、燃焼器148などの他のパラメータを監視することができる。
【0028】
タービンコントローラ108の燃料制御装置120は、1つ又は複数の燃料ノズル150への燃料流量を増加又は減少させるように構成され、それにより、燃焼器148内の燃焼力学、次いでタービン140の動作を変化させることができる。例えば、燃料制御装置120は、燃料ノズル150への燃料流速を低減し、燃焼器148内の燃焼を低減し、したがって、タービン140の速度を低減することができる。同様に、燃料制御装置120は、燃料ノズル150への燃料流速を増加させて、燃焼器148内の燃焼を増加させ、したがって、タービン140の速度を増加させることができる。燃料制御装置120は、燃料ノズル150の数及び構成に応じて、燃料注入の他の特性を変化させることもできる。例えば、燃料制御装置120は、異なる燃料ノズル150への複数の独立した燃料ラインを調整し、燃焼器148内の燃焼特性を変化させることができる。図2に示すように、ブロック152は、共通又は独立した燃料ライン、マニホールド、又は燃料調節器に対応する可能性がある。グリッド不安定化現象に応答して、汎用性周波数コントローラ50は、燃料制御装置120の様々な項目を制御することができる。
【0029】
タービンコントローラ108の電力制御装置122は、タービン140の出力を増加又は減少させるように構成することができる。例えば、電力制御装置122は、圧縮機142、燃料ノズル150、燃焼器148、タービン140、及び外部負荷(発電機144など)の様々な動作パラメータを監視及び/又は制御することができる。具体的には、電力制御装置122は、燃料制御装置120と協働して、燃料流量を調整し、それにより、燃焼を調整することができる。電力制御装置122は、性能、排出物などを含む様々な理由から、複数の燃料(ガス及び/又は液体燃料など)、空気、水、窒素、又は他の様々な流体の流量を制御することもできる。例えば、電力制御装置122は、様々な条件及び利用可能な燃料に応じて、ガス燃料流、液体燃料流、又はその両方を選択可能とすることができる。別の例では、電力制御装置122は、電力要求に応じて、低熱量(BTU)燃料又は高熱量(BTU)燃料を選択可能とすることができる。同様に、電力制御装置122は、排出物を制御するために、水流、窒素流、又は他の流れを選択可能とすることができる。タービン発電機コントローラ102は、周波数ベースのグリッド外乱に応答して、電力制御装置122の様々な項目を制御し、汎用性周波数コントローラ50により制御されるように、出力を調整することができる。
【0030】
タービンコントローラ108の保護制御装置124は、潜在的損傷、過剰な摩耗、又は動作閾値を示す現象に応答して、修正動作を実行することができる。例えば、タービンモニタ118が、過剰な振動、ノイズ、又は潜在的損傷の他の指標を特定するとき、保護制御装置124は、速度を低減し、又はタービン発電機104を運転停止し、さらなる損傷の可能性を低減することができる。いくつかの実施形態では、タービンコントローラ108の保護制御装置124は、例えばタービン140及び/又は圧縮機142において、回転要素と固定要素との間の間隙を制御することができる間隙制御装置を含むことができる。例えば、間隙制御装置は、タービン140又は圧縮機142を通る冷却材流量を増加又は減少させ、固定要素の熱膨張又は収縮を変化させ、それにより、回転ブレードの周りの固定要素(シュラウド部分など)を膨張又は収縮させることができる。このように、間隙制御装置は、タービン140及び圧縮機142内の回転ブレードと固定要素との間の間隙を増加又は減少させることができる。その代わりに、間隙制御装置は、タービン140又は圧縮機142内の回転ブレードの周りに配置される固定要素に結合する駆動装置などの、タービン140又は圧縮機142内の他の間隙装置を制御することができる。
【0031】
発電機コントローラ110は、様々なモニタ制御装置を有し、タービン発電機104からの出力の性能及び信頼性を改善することもできる。例えば、発電機モニタ126は、電圧、電流、及び周波数などの、発電機144の様々な電力特性を監視することができる。発電機モニタ126は、振動、ノイズ、又は巻線故障などの、摩耗又は疲労を示す様々な特性を監視することもできる。電圧制御装置128は、発電機144からの電気出力を処理及びフィルタリングするように構成され、それにより、電力グリッド12に所望の電気出力をもたらすことができる。
【0032】
保護制御装置130は、発電機モニタ126からのフィードバックに応答して修正動作を行うように構成され、それにより、発電機144又はタービン発電機104の疲労又は劣化の可能性を全体的に低減することができる。例えば、保護制御装置130は、発電機モニタ126により特定される過剰な振動又はノイズに応答して、タービン発電機104から発電機144を切断し、発電機144から負荷を切断し、又はタービン発電機104を運転停止することができる。
【0033】
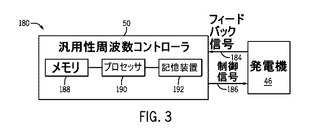
タービン発電機104などの発電機46の1次周波数応答を制御することができる汎用性周波数コントローラ50の実施形態の概略図180を図3に示す。図3は、発電機46と連絡する汎用性周波数コントローラ50を概略的に示すが、汎用性周波数コントローラ50は、発電ユニット18の一部品(駆動装置44など)である、発電ユニット18の他の要素を介して発電機46と連絡することができることを理解されたい。図示するように、汎用性周波数コントローラ50は、特に電力グリッド12の周波数を含むことができる、発電機46から(1つ又は複数の)フィードバック信号184を受け取る。(1つ又は複数の)フィードバック信号184に少なくとも部分的に基づいて、汎用性周波数コントローラ50は、発電機46が特定の速度で電力を出力するようにする(1つ又は複数の)制御信号186を決定することができる。例えば、(1つ又は複数の)制御信号186は、電力(MW)目標寄与量、電力(MW)需要量制御誤差、及び/又は所望の電力増加の他の任意の適当な表示を含むことができる。
【0034】
図3に示すように、汎用性周波数コントローラ50は、メモリ188、プロセッサ190、及び記憶装置192を含む。メモリ188は、ランダムアクセスメモリ(RAM)などの揮発性メモリ、及び/又はリードオンリーメモリ(ROM)などの不揮発性メモリを含むことができる。メモリ188は、汎用性周波数コントローラ50が本明細書に開示する技法を実行することができるように、汎用性周波数コントローラ50用のプロセッサ実行可能命令(例えば、ファームウェア又はソフトウェア)を記憶することができる。プロセッサ190は、汎用性周波数コントローラ50を制御する命令を実行することができる。プロセッサ190は、1つ又は複数の「汎用」マイクロプロセッサ、1つ又は複数の特定目的マイクロプロセッサ及び/もしくはASICS、又はそれらのいくつかの組合せなどの、1つ又は複数のマイクロプロセッサを含むことができる。例えば、プロセッサ190は、1つ又は複数の縮小命令セット(RISC)プロセッサを含むことができる。図に示されている本実施形態の汎用性周波数コントローラ50の不揮発性記憶装置192は、ROM、フラッシュメモリ、ハードドライブ、又は他の任意の適当な光、磁気、もしくはソリッドステートの記憶媒体、あるいはそれらの組合せを含むことができる。記憶装置192は、データファイル(例えば、1次周波数応答の接近速度及び/又は時間を制御する、周波数応答スケジュール及び/又は速度制限スケジュール)、命令(例えば、汎用性周波数コントローラ50の機能を実行する、ソフトウェア又はファームウェア)、及び他の任意の適当なデータを記憶することができる。
【0035】
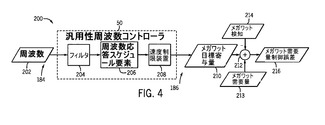
電力グリッド12の周波数外乱が起こるとき、汎用性周波数コントローラ50は、図4の流れ図200により全体的に示すように、周波数応答スケジュール及び/又は速度制限スケジュールに応じて、発電機46がその出力を増加又は減少させることにより応答するようにすることができる。流れ図200は、発電機46の出力を制御するために周期的に(例えば、1ミリ秒、5ミリ秒、10ミリ秒、30ミリ秒、1秒、5秒、10秒、30秒、1分、5分、10分、30分、1時間毎など、又は周波数外乱が起こったとみなされるときはいつでも)反復することができる反復処理を示す。したがって、汎用性周波数コントローラ50は、図3を参照して上述した(1つ又は複数の)フィードバック信号184を表すことができる周波数信号202を受け取ることができる。周波数信号202は、電力グリッド12の周波数を表し、標準動作状態の下で、ほぼ一定の公称値(例えば、通常50Hz又は60Hz)を維持すべきである。電力グリッド12の周波数外乱が起こったことを周波数信号202が示すかどうか、及び/又は周波数外乱が起こった範囲に少なくとも部分的に基づいて、汎用性周波数コントローラ50は、発電機46が1次周波数応答を実行するようにすることができる。以下に説明するように、汎用性周波数コントローラ50は、最終目標寄与電力だけでなく、接近速度及び/又は到達時間も制御する方法で、周波数外乱に対する1次周波数応答を制御することができる。
【0036】
具体的には、汎用性周波数コントローラ50は、フィルタ要素204、周波数応答スケジュール要素206、及び可変速度制限装置要素208を介して、流れ図の図4により表される処理を実行することができ、フィルタ要素204、周波数応答スケジュール要素206、及び可変速度制限装置要素208は共同で、1次周波数応答中の発電機46により出力される電力が、必ずしも最大可能速度で増加又は減少するのではなく、特定のパターンに従うようにさせる。すなわち、フィルタ要素204、周波数応答スケジュール要素206、及び速度制限装置要素208は、発電機46が、例えば同じもしくは異なるタイプの別の発電機46、電圧低下応答、又は緊急応答などをシミュレートすることにより、周波数外乱に応答することを可能にすることができる。さらに、フィルタ要素204、周波数応答スケジュール要素206、及び速度制限装置要素208は、ハードウェア、プロセッサ実行可能命令、又はハードウェアとプロセッサ実行可能命令との組合せを使用して、汎用性周波数コントローラ50内に実装することができる。フィルタ要素204は、周波数信号202を受け取り、周波数信号202が周波数帯域(例えば不感帯域)内又はその外にあるかどうかを判定することができる。したがって、フィルタ要素204は、ある周波数帯域内の周波数を遮断し、不感帯域外の周波数のみを通過させる不感帯域フィルタとして機能することができる。例えば、不感帯域周波数範囲は、約60Hz+/−10mHz、60Hz+/−20mHz、60Hz+/−25mHz、もしくは60Hz+/−30mHz、又は他の任意の適当な不感帯域範囲とすることができる。したがって、不感帯域周波数範囲が、約60Hz+/−20mHzであるとき、60Hz+/−20mHzの範囲内のどの周波数も、フィルタにより汎用性周波数コントローラ50を通過することを遮断される。
【0037】
周波数信号202が、フィルタ要素204により遮断されないとき、周波数応答スケジュール要素206は、周波数信号202を応答電力信号と関連付ける。周波数応答スケジュール要素206は、例えば、周波数信号202の可能な値に対応する応答電力信号を含む、参照表又はリストを含むことができる。周波数応答スケジュール要素206は、発電機46及び電力系統40に固有の変数(例えば、最大発電機出力、現発電機出力、パーセント寄与量など)の組合せを使用して計画することができる。
【0038】
それに加えて、周波数応答スケジュール要素206は、汎用性周波数コントローラ50の異なる実施形態で異なる可能性がある。いくつかの実施形態では、周波数が不感帯域周波数範囲外にあるとき、周波数応答スケジュール要素206は、示された最終目標寄与電力に周波数を線形的に関連付けることができる。例えば、周波数応答スケジュール要素206が周波数を最終目標寄与電力に関連付けることができる1つの方法のグラフ表示を含む、図5及び以下のその関連説明を参照されたい。さらに、電圧低下状態などの特定の状態が起こるとき、特定の周波数応答スケジュール206を使用することができる。いくつかの実施形態では、汎用性周波数コントローラ50は、複数の周波数応答スケジュール要素206を含むことができることに留意されたい。
【0039】
周波数応答スケジュール要素206が、最終目標出力を決定すると、速度制限装置要素208は、速度制限スケジュールに応じて、応答電力信号の変化速度を制限する。したがって、速度制限装置要素208は、周波数応答スケジュール要素206からの最終目標寄与電力、及び周波数外乱が最初に検出されて以降に経過した時間量に少なくとも部分的に基づき、目標電力信号210を指示する速度制限スケジュール(速度表など)に応じて動作することができる。それに加えて、又はその代わりに、速度制限装置要素208の速度制限スケジュールは、目標電力信号210を生成するために、利用可能な総寄与電力のパーセンテージとしての最終目標寄与電力を時間スケジュールに関連付けることができる。
【0040】
いくつかの例を提供すれば、特定の状態(電圧低下状態など)が起こるとき、又は特定の発電機46(電力グリッド12の別の発電機46など)の1次周波数応答をシミュレートするとき、特定の速度制限スケジュールを使用する特定の速度制限装置要素208を使用することができる。いくつかの実施形態では、汎用性周波数コントローラ50は、複数の速度制限装置要素208を含むことができ、及び/又は、速度制限装置要素208は、複数の速度制限スケジュールを含むことができる。
【0041】
上述のように、速度制限装置要素208は、即時目標寄与電力210を出力する。システムにより要求される電力を表す即時目標寄与電力210及びメガワット需要量213が、発電機46の現出力を表す、メガワット検知214の信号に加算212されるとき、メガワット需要量制御誤差216の信号が生じる。このメガワット需要量制御誤差216の信号は、発電機46の出力を制御するのに使用される。具体的には、メガワット需要量制御誤差216の信号は、発電機46の出力に対する増加量又は減少量を表す。
【0042】
上述のように、図4の流れ図の動作は、周期ベースで反復的に繰り返すことができる。したがって、各反復回で、周波数信号202が同じままで、したがって、周波数応答スケジュール要素206により示される最終目標寄与電力が同じままであることができても、時間が変化するとき、速度制限装置要素208は、異なる値の即時目標寄与電力210を出力することができる。具体的には、図6及び7を参照して以下に説明するように、速度制限装置要素208は、変化する値の即時目標寄与電力210を出力して、制御された接近速度及び/又は到達時間を有する1次周波数応答を発電機46がもたらすようにすることができる。
【0043】
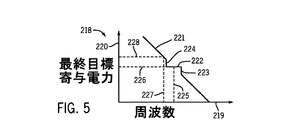
図5は、最終目標寄与電力値を決定する、汎用性周波数コントローラ50の周波数応答スケジュール要素206が使用することができる周波数応答スケジュール218の一例の図である。図5の周波数応答スケジュール218では、x軸は、グリッド周波数219を表すが、y軸は、最終目標寄与電力220を表す。したがって、線221は、グリッド周波数219に応じて提供するように発電機46を制御することができる最終目標寄与電力220を表す。線221は、全体的に垂直な領域223及び224により境界を付けられる、全体的に水平な領域222を含む。線221は、領域222、223、及び224を取り囲む、線221の両側では全体的に直線的に示されるが、いくつかの実施形態では、線221は、直線的でない可能性がある。
【0044】
全体的に水平な領域222は、周波数219が領域223と224との間の周波数範囲内(例えば、不感帯域内)であるとき、通常示される寄与電力220を表す。したがって、不感帯域周波数範囲内で、最終目標寄与電力220は、約0MWとすることができる。すなわち、電力グリッドの公称周波数(例えば、50Hz又は60Hz)に等しい周波数219に対応する入力グリッド周波数225では、最終目標寄与電力226は、0MWとすることができる。不感帯域周波数範囲外の入力グリッド周波数227であれば、対応する最終目標寄与電力228は、0MW未満又は0MWを上回ることができる。
【0045】
言い換えれば、図5の周波数応答スケジュール218は、周波数外乱が起こるとき、寄与電力降下としてもたらす、最終目標寄与電力を表す。例えば、周波数応答スケジュール218は、番号225で示される公称周波数(例えば、50Hz又は60Hz)と共に、様々な周波数の、示された最終目標寄与電力を表すことができる。図5の周波数応答スケジュール218は、特定の周波数(例えば、公称周波数225の±2.5%、±5%、±10%、又は±16%)において到達する、最大及び最小の最終目標寄与電力を指示することができる。すなわち、電力グリッド12の周波数が、ある値又はパーセンテージだけ降下したとき、(発電機46が出力する電力の増加量を表す)最大最終目標寄与電力を示し、電力グリッドの周波数が、ある値又はパーセンテージだけ上昇したとき、(発電機46が出力する電力の減少量を表す)最小最終目標電力を指示することができる。
【0046】
一例を提供すれば、例えば、発電機46の総出力容量が100MWであり、現公称出力が50MWであるとき、周波数降下が起これば、発電機46は、50MWの追加に寄与する能力を有することができる。周波数応答スケジュール218は、例えば5%の周波数降下が起こるとき、最大最終目標寄与電力を指示することができる。したがって、周波数219が5%以上降下するとき、周波数応答スケジュール218は、50MWの最大最終目標寄与電力(つまり、50MWの増加量、すなわち合計100MW)を指示することができる。周波数が他のある量227(例えば1%だけ)降下するとき、周波数応答スケジュール218は、最終目標寄与電力228(例えば、最大値の1/5、すなわち10MWの最終目標寄与電力)を指示することができる。同様に、周波数が2%だけ降下するとき、周波数応答スケジュール218は、20MWの最終目標寄与電力などを指示することができる。周波数応答スケジュール218の他の実施形態は、線形又は非線形である可能性があることを理解されたい。
【0047】
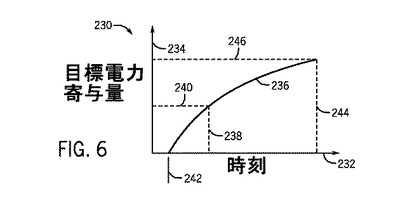
汎用性周波数コントローラ50の速度制限装置要素208により使用される速度制限スケジュール230の実施形態は、図6に表す。速度制限スケジュール230は、周波数応答スケジュール要素206により決定される時間及び最終目標寄与電力の関数としての即時目標寄与電力210(すなわち、特定の接近速度及び/又は到達時間に対応するように、所与の瞬間にもたらされる寄与電力量)を表す。すなわち、速度制限スケジュール230は、周波数応答スケジュール要素206からの最終目標寄与電力に少なくとも部分的に基づいて、時間の関数として即時目標寄与電力210を指示することができる。速度制限スケジュール230では、y軸234は、メガワット目標寄与量を表し、x軸232は、最後に検出された周波数外乱の開始以降の時刻を表す。したがって、曲線236は、発電機46に提供される即時目標寄与電力210を、周波数外乱の開始時に始まる時刻と関連付ける。図6の例では、曲線236は、開始時刻242から比較的急激に増加し、終了時刻244まで緩やかに最終目標寄与電力に接近し、終了時点を超えて、周波数外乱が続く限り、即時目標寄与電力210は、通常、最終目標寄与電力に等しくなる可能性がある。例えば、時刻238では、速度制限スケジュール230は、最大許容寄与電力240の即時目標寄与電力210を指示する。時刻244では、速度制限スケジュール230は、最終目標寄与電力に等しくなる可能性がある、最大許容寄与電力246の即時目標寄与電力210を指示する。
【0048】
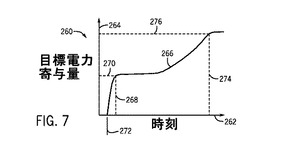
速度制限装置要素208は、様々な形状、接近速度、及び/又は到達時間を有する、他の機能的形態の速度制限スケジュールを使用することができる。実際に、図7に示すように、緊急状態の下で緊急応答を提供する緊急応答速度表に、速度制限スケジュール260を使用することができる。あるいは、発電機46が蒸気発電機などの他の発電機の1次周波数応答を模倣するようにするのに、速度制限スケジュール260を使用することができる。速度制限スケジュール260は、速度制限スケジュール230と同様に、周波数応答スケジュール要素206により決定される時間及び最終目標寄与電力の関数として速度制限装置要素208により出力される、即時目標寄与電力210を表す。すなわち、速度制限スケジュール230は、周波数応答スケジュール要素206からの最終目標寄与電力に少なくとも部分的に基づいて、時間の関数として即時目標寄与電力210を指示することができる。
【0049】
速度制限スケジュールでは、y軸264は、メガワット目標を表し、x軸262は、周波数外乱の開始以降の時刻を表す。したがって、曲線266は、発電機46に提供される即時目標寄与電力210を、周波数外乱の開始時に始まる時刻と関連付ける。図7の例では、曲線266は、通常、1次周波数応答中に蒸気発電機により実行される、同じパターンの出力に全体的に従う。しかし、その代わりに、曲線266は、他の形状、接近速度、及び/又は到達時間を有することができることを理解されたい。図7からわかるように、曲線266は、終了時刻274で最終目標寄与電力に到達するまで、開始時刻272から特定の関数に従って増加し、終了時点を超えて、周波数外乱が続く限り、即時目標寄与電力210は、通常、最終目標寄与電力に等しくなる可能性がある。例えば、時刻268では、速度制限スケジュール260は、最大許容寄与電力270の即時目標寄与電力210を指示する。時刻274では、速度制限スケジュール260は、最終目標寄与電力に等しくなる可能性がある、最大許容寄与電力276の即時目標寄与電力210を指示する。
【0050】
速度制限装置要素208が使用することができる速度制限スケジュールのさらに他の例は、他のパターン及び/又は関数に従う可能性がある。具体的には、速度制限スケジュールの少なくとも1つの実施形態では、即時目標寄与電力210は、最終目標寄与電力の特定の値に関係なく、時間と共に線形的に最終目標寄与電力に向かって増加する可能性がある。そうした速度制限スケジュールは、周波数応答スケジュール要素206により決定される最終目標寄与電力に関係なく、一定の勾配(MW/s)を有する即時目標寄与電力210を指示することができる。他の実施形態は、最終目標寄与電力に応じて変化する勾配(MW/s)を有することができる。
【0051】
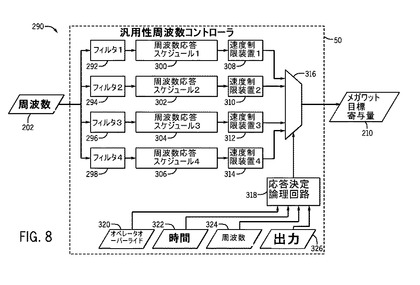
汎用性周波数コントローラ50は、様々な環境の下で使用することができる、様々な異なる1次周波数応答をもたらすことができる場合がある。例えば、図8は、汎用性周波数コントローラ50が少なくとも4つの異なる1次周波数応答をもたらすことができる、別の流れ図290を表す。他の実施形態は、より多い又はより少ない1次周波数応答をもたらすことができることを理解されたい。図4の流れ図200と同様に、流れ図290は、汎用性周波数コントローラ50が発電機46の出力を制御するために周期的に(例えば、1ミリ秒、5ミリ秒、10ミリ秒、30ミリ秒、1秒、5秒、10秒、30秒、1分、5分、10分、30分、1時間毎など、又は周波数外乱が起こったとみなされるときはいつでも)反復することができる反復処理を表す。流れ図290の様々な要素は、ハードウェア、プロセッサ実行可能命令、又はハードウェアとプロセッサ実行可能命令との組合せを使用して、汎用性周波数コントローラ50内に実装することができる。
【0052】
図8からわかるように、流れ図290は、フィルタ要素292、294、296、及び298と、周波数応答スケジュール要素300、302、304、及び306と、速度制限装置要素308、310、312、及び314とを含み、これらはそれぞれ、発電機46により出力される電力が、必ずしも単に最大可能速度で増加又は減少するのではなく、特定の1次周波数応答パターンに従うようにする。すなわち、フィルタ要素292、294、296、及び298と、周波数応答スケジュール要素300、302、304、及び306と、速度制限装置要素308、310、312、及び314とは、それらが同じ又は異なるそれぞれの不感帯域、周波数応答スケジュール、及び/又は速度制限スケジュールを使用することを除けば、図4のフィルタ要素204、周波数応答スケジュール要素206、及び速度制限装置要素208と全体的に同じ方法で、それぞれ機能することができる。
【0053】
したがって、速度制限装置要素308、310、312、及び314は、マルチプレクサ316に異なる即時目標寄与電力210の信号を提供することができる。応答決定論理回路318は、マルチプレクサ316を介して、適当な任意の数の因子に基づき、汎用性周波数コントローラ50により最終的に出力される目標メガワット寄与信号210を選択することができる。例えば、応答決定論理回路318は、オペレータオーバーライド320、時間322、周波数324、又は出力326などに少なくとも部分的に基づいて、どの即時目標寄与電力210を選択すべきかを決定することができる。他の任意の適当な因子を使用することができる。
【0054】
オペレータオーバーライド320の因子は、オペレータが特定のフィルタ要素、周波数応答スケジュール要素、及び速度制限装置要素をいつ選択したいかを指示することができる。そうした選択は、電力グリッド12の予測負荷、機能テスト、又はオペレータにより決定される他のいくつかの理由に基づいて決定することができる。応答決定論理回路318は、1日又は1年の別々の時間中(例えば、使用頻度がより低い時間に対する最大エネルギー使用時間中)に、フィルタ要素、周波数応答スケジュール要素、及び速度制限装置要素の異なる組合せを適用することができるように、時間322を使用することができる。例えば、フィルタ要素、周波数応答スケジュール要素、及び速度制限装置要素のある組合せを夜間に使用し、別の組合せを昼間に使用することができる。同様に、フィルタ要素、周波数応答スケジュール要素、及び速度制限装置要素のある組合せを、冬などの1年のある季節の間に使用することができるが、別の組合せは、夏などの1年の別に季節の間に使用される。
【0055】
それに加えて、どの組合せを使用すべきかを決定するために、グリッドの周波数324を使用することができる。例えば、周波数324が、急激に増加又は減少するとき、フィルタ、周波数応答スケジュール、及び速度制限装置のある組合せを使用することができるが、緩やかな周波数変化には、別の組合せを使用することができる。例えば、周波数324が閾値未満まで降下するとき、電圧低下状態が存在する可能性がある。したがって、電圧低下状態に適したフィルタ要素、周波数応答スケジュール要素、及び速度制限装置要素は、即時目標寄与電力210の信号を提供することができる。同様に、発電機46から利用可能な寄与電力量に少なくとも部分的に基づいて選択することができる、使用すべきフィルタ要素、周波数応答スケジュール要素、及び速度制限装置要素の組合せを決定するのに、発電機46の出力326を使用することができる。例えば、発電機46が、その最大容量近傍で電力を発生させているとき、ある組合せを使用することができるが、発電機46が最小容量近傍にあるとき、別の組合せを使用することができる。さらに、使用される組合せは、ベース負荷(例えば最小負荷)、中間負荷(例えば、標準動作負荷)、又はピーク負荷(例えば、最大負荷)などの負荷レベルに依存する可能性がある。
【0056】
本開示の技術的効果は、カスタマイズされた1次周波数応答をもたらすために、発電機を制御することを含む。例えば、電力グリッド周波数外乱が起こると直ちに、発電機コントローラは、最終目標寄与電力に到達するまで、時間と共に安定した速度(例えば、線形又は非線形速度)で増加する即時目標寄与電力を決定することができる。このように、発電機コントローラは、1次周波数応答の接近速度及び/又は到達時間を制御することができ、したがって、発電機の1次周波数応答が要望通りに変化するようにすることができる。例えば、発電機の1次周波数応答は、蒸気発電機などの別の発電機をシミュレートすることができ、又は、電力グリッドに存在する別の発電機と同じ応答パターンに全体的に従うことができる。
【0057】
この記載した説明は、最良の形態を含めて、本発明を開示し、さらに、当業者が、任意の装置又はシステムを作成及び使用し、組み込まれた任意の方法を実施することを含めて、本発明を実施することができるように、実施例を使用する。本発明の特許範囲は、特許請求の範囲により規定され、当業者が想到する他の実施例を含むことができる。そうした他の実施例は、それらが特許請求の範囲の文言と異ならない構成要素を有するとき、又は、それらが特許請求の範囲の文言と実質的な差がない均等な構成要素を含むとき、特許請求の範囲の範囲内にあるものとする。
【符号の説明】
【0058】
10 電気システム
12 電力グリッド
14 電力ユニット
16 分散負荷
18 電力ユニット
20 電力ユニット
22 電力ユニット
24 電力ユニット
26 電力ユニット
28 電力ユニット
30 負荷
32 負荷
34 負荷
36 負荷
38 負荷
40 電力系統システム
42 電力設備信号
44 駆動装置
46 発電機
48 調速機
50 汎用性周波数コントローラ
52 メガワットセンサ
54 保護制御装置
56 グリッドモニタ
58 故障モニタ
60 トリップモニタ
62 変動モニタ
64 送電線故障
66 第1の部分
68 第2の部分
70 トリップ
72 変動
100 タービン発電機システム
102 タービン発電機コントローラ
104 タービン発電機
108 タービンコントローラ
110 発電機コントローラ
112 ヒューマンマシンインターフェース
114 電力設備信号
116 電力設備
118 タービンモニタ
120 燃料制御装置
122 電力制御装置
124 保護制御装置
126 発電機モニタ
128 電圧制御装置
130 保護制御装置
140 タービン
142 圧縮機
144 発電機
146 シャフト
148 燃焼器
150 燃料ノズル
152 燃料
154 空気
156 高温燃焼ガス
158 上流吸気口
160 圧縮空気
180 概略図
188 メモリ
190 プロセッサ
192 記憶装置
200 流れ図
202 周波数信号
204 フィルタ要素
206 周波数応答スケジュール要素
208 可変速度制限装置要素
210 目標電力信号
212 加算
213 メガワット需要量
214 メガワット検知
216 メガワット需要量制御誤差
218 周波数応答スケジュール
219 グリッド周波数
220 最終目標寄与電力
221 線
222 水平な領域
223 垂直な領域
224 垂直な領域
225 入力グリッド周波数
226 最終目標寄与電力
227 入力グリッド周波数
228 目標電力寄与量
230 速度制限スケジュール
232 x軸
234 y軸
236 曲線
238 時刻
240 最大許容寄与電力
242 開始時刻
244 終了時刻
246 最大許容寄与電力
260 速度制限スケジュール
262 x軸
264 y軸
266 曲線
268 時刻
270 最大許容寄与電力
272 開始時刻
274 終了時刻
276 最大許容寄与電力
290 別の流れ図
292 フィルタ要素
294 フィルタ要素
296 フィルタ要素
298 フィルタ要素
300 周波数応答スケジュール要素
302 周波数応答スケジュール要素
304 周波数応答スケジュール要素
306 周波数応答スケジュール要素
308 速度制限装置要素
310 速度制限装置要素
312 速度制限装置要素
314 速度制限装置要素
316 マルチプレクサ
318 応答決定論理回路
320 オペレータオーバーライド
322 時間
324 周波数
326 出力
【技術分野】
【0001】
本明細書に開示する主題は、概略的には、発電ユニットに関し、より具体的には、発電機を制御するためのシステム及び装置に関する。
【背景技術】
【0002】
発電ユニットは、通常、公称周波数(例えば、50Hz又は60Hz)で電力グリッドに交流を提供する。しかし、時々、電力グリッド周波数は、揺動し、公称周波数から変化する場合がある。例えば、発電ユニットが突然追加され、もしくは電力グリッドから除去されるとき、又は、電力グリッドに接続される負荷が突然追加もしくは除去されるとき、そうした周波数外乱が起こる可能性がある。電力グリッドの安定性を維持するために、発電ユニットは、それに応じて出力を増加又は減少させることにより、周波数外乱に応答することができる。例えば、電力グリッド周波数の変化が、不感帯域周波数として知られる閾値(例えば、最小周波数変化)を超えるとき、個々の発電ユニットは、1次周波数応答を実行し、各発電ユニットにより発生する電力量を周波数変化に比例して増加及び減少させることができる。異なる発電ユニットは、異なる容量及び特性を有する可能性があるので、いくつかの発電ユニットは、周波数変化に応答して出力を迅速に変化させる可能性があるが、他の発電ユニットは、より緩やかに応答する可能性がある。さらに、周波数応答用の、発電ユニットの最終目標寄与電力を制御することができるが、配電時間、速度、及び形状を制御することができない。それに加えて、電力グリッドの安定性を維持するために、電力グリッド周波数外乱に応答して時間と共に特定の出力を提供するように、いくらかのグリッドオペレータを規制することができ、規制に合わない1次周波数応答を提供する発電ユニットの使用を除外することができる。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】米国特許出願公開第2007/0290507号明細書
【発明の概要】
【0004】
特許請求されている当初の発明と範囲が整合するいくつかの実施形態を以下に要約する。これらの実施形態は、特許請求されている発明の範囲を限定するものではなく、むしろ、これらの実施形態は、本発明の可能な形態の概要のみを提供することを意図している。実際、本発明は、以下に記載する実施形態と同様であるか又はそれらと異なる可能性がある様々な形態を含むことができる。
【0005】
第1の実施形態では、発電機コントローラは、電力グリッド周波数信号を受け取り、周波数信号が周波数帯域外であるとき、この周波数信号を出力するように構成されるフィルタ要素を含む。コントローラは、フィルタリングされた周波数信号に少なくとも部分的に基づいて最終目標寄与電力を決定するように構成される周波数応答スケジュール要素をさらに含む。最終目標寄与電力は、発電機が1次周波数応答において提供すべき最終電力寄与量を表す。コントローラは、時間と共に変化し、速度制限スケジュールに少なくとも部分的に基づいて最終目標寄与電力に接近する即時目標寄与電力信号を決定するように構成される可変速度制限装置要素を含む。即時目標寄与電力信号は、発電機が、即時目標寄与電力信号に対応する量だけ発電機により出力される電力を増加又は減少させるようにするように構成される。
【0006】
第2の実施形態では、システムは、トルクを発生させるように構成されるガスタービンと、ガスタービンに結合する発電機とを含む。発電機は、トルクに基づいて電力グリッドに電力を提供するように構成される。システムは、ガスタービンと結合するコントローラも含む。コントローラは、複数の即時目標寄与電力信号の1つに少なくとも部分的に基づき、電力グリッドの周波数信号に対する1次周波数応答として、ガスタービンがトルクを変化させるようにするように構成される。コントローラは、周波数信号を受け取り、周波数信号が周波数帯域外であるとき、この周波数信号を出力するように構成される、1つ又は複数の周波数フィルタを含む。コントローラは、周波数信号を受け取り、それぞれの最終目標寄与電力信号を出力するようにそれぞれが構成される、1つ又は複数の周波数応答スケジュール要素をさらに含む。最終目標寄与電力信号のそれぞれは、発電機が1次周波数応答において提供すべき最終電力寄与量を表す。コントローラは、それぞれの最終目標寄与電力信号を受け取り、速度制限スケジュールに少なくとも部分的に基づいて複数の即時目標寄与電力信号の1つを決定するようにそれぞれが構成される、1つ又は複数の速度制限装置要素を含む。複数の即時目標寄与電力信号のそれぞれは、発電機が、発電機により出力される電力を、この即時目標寄与電力信号により指示されるレベルまで増加又は減少させるようにするように構成される。
【0007】
第3の実施形態では、製造物品は、上にプロセッサ実行可能命令をエンコードした、1つ又は複数の有体の機械読取可能媒体を含む。命令は、電力グリッド周波数信号を受け取る命令と、電力グリッド周波数信号が電力グリッドの公称周波数の周りの不感帯域よりも高いか、又はそれよりも低いかを判定することにより、周波数外乱がいつ起こったかを判定する命令とを含む。命令は、周波数外乱が起こったとき、電力グリッドの公称周波数と電力グリッド周波数信号との間の差に少なくとも部分的に基づいて最終目標寄与電力を決定する命令も含む。最終目標寄与電力は、周波数外乱に対する発電機の1次周波数応答と関連する最終電力寄与量を表す。命令は、周波数応答が起こったとき、最終目標寄与電力及び周波数外乱が起こった後の時間に少なくとも部分的に基づいて、即時目標寄与電力信号を決定する命令を含む。即時目標寄与電力は、周波数外乱に対する発電機の1次周波数応答と関連する即時寄与電力量を表す。最終目標寄与電力、又は即時目標寄与電力、又はその両方を決定する命令は、現時刻、現日付、電力グリッド周波数信号、発電機の現出力、オペレータの嗜好、動作仕様、又は電力グリッドに関連する規則もしくは規制、又はそれらのいくつかの組合せに少なくとも部分的に基づいて変化するように構成される。
【0008】
本発明のこれら及び他の特徴、態様、及び利点は、図面を通して同様の文字が同様の部品を表す、添付の図面を参照して以下の詳細な説明を読めば、より十分に理解されよう。
【図面の簡単な説明】
【0009】
【図1】発電ユニットが汎用性周波数コントローラを含むことができる電気システムの実施形態のブロック図である。
【図2】汎用性周波数コントローラを含むタービン発電機システムの実施形態のブロック図である。
【図3】汎用性周波数コントローラの実施形態の概略図である。
【図4】汎用性周波数コントローラにより使用される制御システムの実施形態を説明する流れ図である。
【図5】汎用性周波数コントローラの周波数応答スケジュールの実施形態の図である。
【図6】汎用性周波数コントローラの速度制限スケジュールの実施形態の図である。
【図7】汎用性周波数コントローラの速度制限スケジュールの別の実施形態の図である。
【図8】汎用性周波数コントローラにより使用される制御システムの別の実施形態の流れ図である。
【発明を実施するための形態】
【0010】
本発明の1つ又は複数の特定の実施形態を以下に説明する。これらの実施形態を簡潔に説明するために、本明細書には、実際の実施形態のすべての特徴部を説明しない可能性がある。任意の工学的プロジェクト又は設計プロジェクトなどの任意の実際の実施形態の開発では、実施形態により変化する可能性がある、システム関連及びビジネス関連の制約との適合などの、開発者の特定の目標を達成するのに、多くの実施形態に固有の決定を行わなければならないことを理解されたい。さらに、そうした開発努力は、複雑で時間がかかる可能性があるが、それでも、本開示の利益を享受する当業者にとっては、設計、加工、及び製造の日常的な仕事であることを理解されたい。
【0011】
本発明の様々な実施形態の要素を紹介するとき、冠詞「a(1つの)」、「an(1つの)」、「the(その)」、及び「said(前記)」は、1つ又は複数の要素が存在することを意味するものとする。用語「comprising(備える)」、「including(含む)」、及び「having(有する)」は、包括的で、列挙した要素以外の付加的な要素が存在する可能性があることを意味するものとする。
【0012】
本実施形態は、電力グリッド周波数信号の変化に応答して、発電機を制御することに関する。具体的には、以下に開示する実施形態は、単なる目標最終出力ではなく、発電機出力の接近速度及び/又は到達時間を制御することを含む可能性がある。これらの実施形態は、適当な任意の発電機を制御することを含む可能性がある。具体的には、いくつかの実施形態は、電力グリッドの周波数外乱に対して比較的感受性が高い可能性があるが、そうした外乱に比較的迅速に応答することもできる、航空機転用タービン発電機などの低慣性発電機の周波数応答を制御することに適用する。本明細書に使用する用語「flexible frequency controller(汎用性周波数コントローラ)」は、周波数応答シーケンス中に、出力の接近速度及び/又は到達時間を制御することができる発電機コントローラを指す。
【0013】
電力グリッドの周波数を公称周波数(例えば、通常50Hz又は60Hz)から変化させる、周波数外乱が電力グリッドで起こるとき、そうした汎用性周波数コントローラにより、発電機は、制御された方法で出力をもたらすことができる。具体的には、公称周波数からの偏差が、不感帯域として知られる最小閾値を上回るとき、汎用性周波数コントローラは、電力グリッドを安定化するために、1次周波数応答を開始することができる。1次周波数応答は、制御された接近速度及び/又は到達時間に応じて、発電機の出力を増加又は減少させることができる。1次周波数応答の後、通常はより長期性の2次周波数応答は、電力グリッド周波数が安定しながら、一定時間、一定の出力を維持することを含むことができる。本開示は、1次周波数応答に焦点を当てる。
【0014】
具体的には、汎用性周波数コントローラは、周波数応答スケジュール、速度制限スケジュール、及び/又は電力需要量制御誤差を使用して、発電機の1次周波数応答を制御することができる。周波数応答スケジュールは、周波数偏差量に応じて、最終目標寄与電力を特定することができる。この最終目標寄与電力は、発電機が1次周波数応答において最終的にもたらすべき、全寄与電力の増加量又は減少量を表す。しかし、発電機が、寄与電力のすべてを直ちにもたらさないように、発電機を、最終目標寄与電力のみに基づいて制御することはできない。むしろ、最終目標寄与電力を決定したとき、周波数外乱が起こった後、最終目標寄与電力及び/又は時間量に基づいて即時目標寄与電力を決定するのに、その際、速度制限スケジュールを使用することができる。即時目標寄与電力は、時間と共に変化し、最終的に最終目標寄与電力に達することができる。即時目標寄与電力を使用して発電機を制御することにより、時間と共に、発電機は、寄与電力を発生させ、寄与電力に制御された接近速度及び/又は到達時間をもたらすことができる。
【0015】
このように、周波数応答スケジュール、速度制限スケジュール、及び/又は電力需要量制御誤差を使用して、汎用性周波数コントローラは、電力グリッドの安定性を改善することができる方法で、周波数外乱に応答することができる。すなわち、電力グリッドの安定性を改善するために、電力グリッドオペレータは、周波数応答が特定の方法で実行されるように要求することができる。例えば、電力グリッドオペレータは、より速い発電機からの電力がより遅い発電機内に逆流するとき、シーソー効果などを防ぐために、周波数外乱中に、すべての発電機が同様の方法で動作するように要求することができる。具体的には、電力グリッドオペレータは、発電機が、一定の時間にわたり、特定の速度で増加又は減少する出力をもたらすように要求することができる。例えば、一実施形態では、所望の出力変化は、線形変化を有する周波数応答スケジュールにより表すことができるが、発電機による可能な最大変化速度は、指数関数的変化により表すことができる。汎用性周波数コントローラは、単に、発電機を可能な最大速度で応答させるのではなく、発電機が周波数変化に応答する速度を制御することができる。
【0016】
以上を考慮に入れて、図1は、電力グリッド12の周波数ベースの外乱に応答するために、汎用性周波数コントローラを用いて構成することができる電力ユニット14により供給される電力グリッド12を含む電気システム10の実施形態のブロック図である。図示するように、電気システム10は、分散電力ユニット14及び分散負荷16に結合する電力グリッド12を含む。分散電力ユニット14は、電力ユニット18、20、22、24、26、及び28を含むことができる。これらの分散電力ユニット14のそれぞれは、電力グリッド12の分配用の電力を発生させるように構成される。分散負荷16は、負荷30、32、34、36、及び38を含むことができる。これらの分散負荷16のそれぞれは、機械、建築物、及び他のシステムを動作させるために、電力グリッド12から電力を抽出するように構成される。
【0017】
図示する電気システム10は、電力グリッド12に結合する電力系統システム40も含む。電力系統システム40は、電力グリッド12に一定の制御を与えることができ、電力グリッド12内の過渡安定性揺動などの様々なグリッド不安定化現象を検出することができる。これらの過渡安定性揺動は、周波数、又は電力グリッド12にかかる負荷の激しい変化に対応する可能性がある。それに加えて、そうした現象が起こるとき、電力系統システム40は、電力ユニット14の1つ又は複数から電力設備信号42を受け取ることができる。電力設備信号42は、電力ユニット14に関する、状態及び/又はヘルスデータなどのデータを電力オペレータに提供することができる。
【0018】
分散電力ユニット14は、電力グリッド12に電力を分配するように構成される、様々な発電システムを含むことができる。例えば、そうした分散電力ユニット14は、往復動燃焼エンジン、ガスタービンエンジン、蒸気タービンエンジン、水力タービン、風力タービンなどにより駆動される発電機を含むことができる。これらの分散電力ユニット14のサイズは、ユニットにより様々である可能性もある。例えば、ある電力ユニット14は、電力グリッド12に対して、別の電力ユニット14よりも大幅に大きい慣性を有する可能性がある。大きい慣性を有する電力ユニット14は、低慣性の電力ユニット14よりも、周波数変化に応答するのに、より多くの時間がかかる可能性がある。
【0019】
図示する実施形態では、電力ユニット18は、比較的低慣性の電力ユニット14を表し、発電機46に結合する駆動装置44を含む。電力ユニット18は、駆動装置44の比例動作制御をもたらすことができる調速機48も含む。駆動装置44は、調速機48及び/又は他の内部制御機構による制御に応答して、発電用の発電機46を回転させるように構成される。いくつかの実施形態では、駆動装置44は、ガスタービンエンジンなどの低回転慣性エンジンを含むことができる。例えば、駆動装置44は、General Electric Company、Schenectady、New Yorkにより製造される、LM1600、LM2500、LM6000、又はLMS100航空機転用ガスタービンエンジンなどの航空機転用ガスタービンエンジンを含むことができる。しかし、駆動装置44は、発電機46を回転させるのに適した任意の装置とすることができる。以下にさらに詳細に説明するように、駆動装置44は、電力グリッド12にかかる負荷の激しい変化に応答して速度が迅速に変化し、それにより、電力グリッド12に対する発電機46からの出力の周波数の迅速な変化をもたらす可能性がある。
【0020】
分散負荷16は、電力グリッド12に関する、様々な装置及び設備を含むことができる。例えば、分散負荷16は、住宅、商業ビル、工業施設、輸送システム、及び個々の装置を含むことができる。一般に、これらの分散負荷16は、24時間の各周期内で電気需要量を緩やかに変化させる可能性がある。例えば、最大需要量は、通常、真昼に生じるが、最小需要量は、通常、真夜中に生じる可能性がある。1日の間に、これらの分散負荷16による電気需要量は、通常、午前の時間帯に増加し、続いて午後の時間帯に減少する可能性がある。分散電力ユニット14は、通常、電力グリッド12に対する電気需要量のこれらの緩やかな変化に応答することができる。不都合なことに、電力グリッド12にかかる急激な負荷変動は、分散電力ユニット16により供給される電力と、分散負荷16による電気需要量との間の大きい差をもたらす可能性がある。その結果、大きい負荷減少により、電力ユニット14は加速し、それにより、電力グリッド12の周波数を増加させる可能性がある。同様に、大きい負荷増加により、電力ユニットは減速し、それにより、電力グリッド12の周波数を減少させる可能性がある。
【0021】
以下にさらに詳細に説明するように、電力グリッド12の周波数を公称周波数から逸脱させる、そうした周波数ベースのグリッド外乱が起こるとき、駆動装置44は、それに応じて、周波数を増加又は減少させることができる。そうした状態が、不感帯域として知られる最小閾値(例えば、1mHz、2mHz、5mHz、10mHz、20mHzなど)を上回る周波数を含むとき、電力グリッド12を安定化するのを助けることを目的とする、汎用性周波数コントローラ50は、駆動装置44などに制御信号をもたらすことができる。さらに、汎用性周波数コントローラ50は、周波数応答スケジュールに応じて、駆動装置44が発電機46へのトルクを追加又は除去するようにする信号をもたらすことができる。そうすることにより、他の分散電力ユニット14と共同で、電力グリッド12の周波数をその公称周波数に戻すことができる電力を追加又は除去することができる。図示する実施形態では、電力ユニット18内のメガワットセンサ52は、発電機46により発生するメガワットを実時間で監視し、汎用性周波数コントローラ50にフィードバックをもたらすように構成される。
【0022】
それに加えて、図示するように、電力系統システム40は、いくつかのシステム全体の現象を監視するように構成することができる。例えば、電力系統システム40は、保護制御装置54及びグリッドモニタ56を含むことができ、これらは共同で、電力グリッド12全体の様々なグリッド不安定化現象に基づいて、迅速な現象特定及び修正動作をもたらす。例えば、グリッドモニタ56は、故障モニタ58、トリップモニタ60、及び変動モニタ62を含むことができる。故障モニタ58は、電力グリッド12内の送電線故障64などの故障を迅速に特定するように構成することができる。故障64は、電力グリッド12の第1及び第2の部分66及び68の断線を表す可能性がある。その結果、送電線故障64は、電力グリッド12の第1の部分66から、負荷36及び38と、電力ユニット26及び28とを切断する可能性がある。
【0023】
トリップモニタ60は、電力ユニット22のトリップ70などの、分散電力ユニット14の1つ又は複数のトリップを特定するように構成することができる。トリップ70の結果、分散負荷16による電力需要量は、分散電力ユニット14によりもたらされる利用可能な電力を突然上回る可能性がある。変動モニタ62は、負荷32の変動72などの、分散負荷16の1つ又は複数による電気需要量の急激な変化を特定するように構成することができる。例えば、変動72は、ある装置、工業施設などの電気需要量の急激な増加又は減少を表す可能性がある。
【0024】
図2は、タービン発電機104に結合するタービン発電機コントローラ102を有するタービン発電機システム100の実施形態のブロック図である。図示するように、タービン発電機コントローラ102は、汎用性周波数コントローラ50、タービンコントローラ108、発電機コントローラ110、メガワットセンサ52、及びヒューマンマシンインターフェース112を含む。以下にさらに詳細に説明するように、汎用性周波数コントローラ50は、1つ又は複数の周波数応答スケジュールなどを使用することなどにより、タービン発電機104に供給される目標電力信号を制御することができる。タービンコントローラ108は、タービンモニタ118、燃料制御装置120、電力制御装置122、及び保護制御装置124などの、様々なモニタ及び制御装置を含むことができる。図示する発電機コントローラ110は、電力設備116(電力設備40など)から電力設備信号114(電力設備信号42など)を受け取ることもでき、発電機モニタ126、電圧制御装置128、及び保護制御装置130などの、様々なモニタ及び制御装置を含むことができる。タービンコントローラ108及び発電機コントローラ110のモニタ及び制御装置は、タービン発電機104のいくつかの特性を監視及び制御するように構成することができる。
【0025】
図示する実施形態では、タービン発電機104は、1つ又は複数のシャフト146を介して圧縮機142及び発電機144に結合するタービン140を含む。理解されるように、図示するタービン140は、1つ又は複数のタービン段を含むことができ、圧縮機142は、1つ又は複数の圧縮機段を含むことができる。タービン発電機104は、燃料152及び空気154の混合物を燃焼し、高温燃焼ガス156をタービン140に供給するように構成される、1つ又は複数の燃焼器148及び燃料ノズル150をさらに含む。具体的には、圧縮機142は、タービン140により駆動され、上流吸気口158で空気154を圧縮し、次いで、1つ又は複数の燃焼器148及び燃料ノズル150に圧縮空気160を供給する。例えば、燃料ノズル150は、燃焼器148に圧縮空気160及び燃料152を燃焼用に適当に混合して送出することができる。
【0026】
次いで、燃料と空気との混合物は、燃焼器148内で燃焼し、それにより、タービン140に流れ込む高温燃焼ガス156を発生させる。高温燃焼ガス156は、シャフト146を回転させるために、タービン140内のタービンブレードを駆動し、それにより、圧縮機142及び発電機144のどちらも駆動する。いくつかの実施形態では、タービンエンジンは、General Electric Company、Schenectady、New Yorkにより製造される、LM1600、LM2500、LM6000、又はLMS100航空機転用ガスタービンエンジンなどの航空機転用ガスタービンエンジンとすることができる。したがって、タービン発電機104は、約14〜100MW、35〜65MW、又は40〜50MWまでの電気を発生させるように構成することができる。例えば、LM2500エンジンは、約18〜35MWまでを発生させるように構成することができ、LM6000エンジンは、約40〜50MWまでを発生させるように構成することができ、LMS100エンジンは、約100MWまでを発生させるように構成することができる。
【0027】
タービン発電機コントローラ102は、タービン発電機104の様々な特性の監視及び制御をもたらす。例えば、タービンコントローラ108のタービンモニタ118は、回転速度、振動、温度、圧力、流量、ノイズ、及びタービン140、圧縮機142、燃焼器148などの他のパラメータを監視することができる。
【0028】
タービンコントローラ108の燃料制御装置120は、1つ又は複数の燃料ノズル150への燃料流量を増加又は減少させるように構成され、それにより、燃焼器148内の燃焼力学、次いでタービン140の動作を変化させることができる。例えば、燃料制御装置120は、燃料ノズル150への燃料流速を低減し、燃焼器148内の燃焼を低減し、したがって、タービン140の速度を低減することができる。同様に、燃料制御装置120は、燃料ノズル150への燃料流速を増加させて、燃焼器148内の燃焼を増加させ、したがって、タービン140の速度を増加させることができる。燃料制御装置120は、燃料ノズル150の数及び構成に応じて、燃料注入の他の特性を変化させることもできる。例えば、燃料制御装置120は、異なる燃料ノズル150への複数の独立した燃料ラインを調整し、燃焼器148内の燃焼特性を変化させることができる。図2に示すように、ブロック152は、共通又は独立した燃料ライン、マニホールド、又は燃料調節器に対応する可能性がある。グリッド不安定化現象に応答して、汎用性周波数コントローラ50は、燃料制御装置120の様々な項目を制御することができる。
【0029】
タービンコントローラ108の電力制御装置122は、タービン140の出力を増加又は減少させるように構成することができる。例えば、電力制御装置122は、圧縮機142、燃料ノズル150、燃焼器148、タービン140、及び外部負荷(発電機144など)の様々な動作パラメータを監視及び/又は制御することができる。具体的には、電力制御装置122は、燃料制御装置120と協働して、燃料流量を調整し、それにより、燃焼を調整することができる。電力制御装置122は、性能、排出物などを含む様々な理由から、複数の燃料(ガス及び/又は液体燃料など)、空気、水、窒素、又は他の様々な流体の流量を制御することもできる。例えば、電力制御装置122は、様々な条件及び利用可能な燃料に応じて、ガス燃料流、液体燃料流、又はその両方を選択可能とすることができる。別の例では、電力制御装置122は、電力要求に応じて、低熱量(BTU)燃料又は高熱量(BTU)燃料を選択可能とすることができる。同様に、電力制御装置122は、排出物を制御するために、水流、窒素流、又は他の流れを選択可能とすることができる。タービン発電機コントローラ102は、周波数ベースのグリッド外乱に応答して、電力制御装置122の様々な項目を制御し、汎用性周波数コントローラ50により制御されるように、出力を調整することができる。
【0030】
タービンコントローラ108の保護制御装置124は、潜在的損傷、過剰な摩耗、又は動作閾値を示す現象に応答して、修正動作を実行することができる。例えば、タービンモニタ118が、過剰な振動、ノイズ、又は潜在的損傷の他の指標を特定するとき、保護制御装置124は、速度を低減し、又はタービン発電機104を運転停止し、さらなる損傷の可能性を低減することができる。いくつかの実施形態では、タービンコントローラ108の保護制御装置124は、例えばタービン140及び/又は圧縮機142において、回転要素と固定要素との間の間隙を制御することができる間隙制御装置を含むことができる。例えば、間隙制御装置は、タービン140又は圧縮機142を通る冷却材流量を増加又は減少させ、固定要素の熱膨張又は収縮を変化させ、それにより、回転ブレードの周りの固定要素(シュラウド部分など)を膨張又は収縮させることができる。このように、間隙制御装置は、タービン140及び圧縮機142内の回転ブレードと固定要素との間の間隙を増加又は減少させることができる。その代わりに、間隙制御装置は、タービン140又は圧縮機142内の回転ブレードの周りに配置される固定要素に結合する駆動装置などの、タービン140又は圧縮機142内の他の間隙装置を制御することができる。
【0031】
発電機コントローラ110は、様々なモニタ制御装置を有し、タービン発電機104からの出力の性能及び信頼性を改善することもできる。例えば、発電機モニタ126は、電圧、電流、及び周波数などの、発電機144の様々な電力特性を監視することができる。発電機モニタ126は、振動、ノイズ、又は巻線故障などの、摩耗又は疲労を示す様々な特性を監視することもできる。電圧制御装置128は、発電機144からの電気出力を処理及びフィルタリングするように構成され、それにより、電力グリッド12に所望の電気出力をもたらすことができる。
【0032】
保護制御装置130は、発電機モニタ126からのフィードバックに応答して修正動作を行うように構成され、それにより、発電機144又はタービン発電機104の疲労又は劣化の可能性を全体的に低減することができる。例えば、保護制御装置130は、発電機モニタ126により特定される過剰な振動又はノイズに応答して、タービン発電機104から発電機144を切断し、発電機144から負荷を切断し、又はタービン発電機104を運転停止することができる。
【0033】
タービン発電機104などの発電機46の1次周波数応答を制御することができる汎用性周波数コントローラ50の実施形態の概略図180を図3に示す。図3は、発電機46と連絡する汎用性周波数コントローラ50を概略的に示すが、汎用性周波数コントローラ50は、発電ユニット18の一部品(駆動装置44など)である、発電ユニット18の他の要素を介して発電機46と連絡することができることを理解されたい。図示するように、汎用性周波数コントローラ50は、特に電力グリッド12の周波数を含むことができる、発電機46から(1つ又は複数の)フィードバック信号184を受け取る。(1つ又は複数の)フィードバック信号184に少なくとも部分的に基づいて、汎用性周波数コントローラ50は、発電機46が特定の速度で電力を出力するようにする(1つ又は複数の)制御信号186を決定することができる。例えば、(1つ又は複数の)制御信号186は、電力(MW)目標寄与量、電力(MW)需要量制御誤差、及び/又は所望の電力増加の他の任意の適当な表示を含むことができる。
【0034】
図3に示すように、汎用性周波数コントローラ50は、メモリ188、プロセッサ190、及び記憶装置192を含む。メモリ188は、ランダムアクセスメモリ(RAM)などの揮発性メモリ、及び/又はリードオンリーメモリ(ROM)などの不揮発性メモリを含むことができる。メモリ188は、汎用性周波数コントローラ50が本明細書に開示する技法を実行することができるように、汎用性周波数コントローラ50用のプロセッサ実行可能命令(例えば、ファームウェア又はソフトウェア)を記憶することができる。プロセッサ190は、汎用性周波数コントローラ50を制御する命令を実行することができる。プロセッサ190は、1つ又は複数の「汎用」マイクロプロセッサ、1つ又は複数の特定目的マイクロプロセッサ及び/もしくはASICS、又はそれらのいくつかの組合せなどの、1つ又は複数のマイクロプロセッサを含むことができる。例えば、プロセッサ190は、1つ又は複数の縮小命令セット(RISC)プロセッサを含むことができる。図に示されている本実施形態の汎用性周波数コントローラ50の不揮発性記憶装置192は、ROM、フラッシュメモリ、ハードドライブ、又は他の任意の適当な光、磁気、もしくはソリッドステートの記憶媒体、あるいはそれらの組合せを含むことができる。記憶装置192は、データファイル(例えば、1次周波数応答の接近速度及び/又は時間を制御する、周波数応答スケジュール及び/又は速度制限スケジュール)、命令(例えば、汎用性周波数コントローラ50の機能を実行する、ソフトウェア又はファームウェア)、及び他の任意の適当なデータを記憶することができる。
【0035】
電力グリッド12の周波数外乱が起こるとき、汎用性周波数コントローラ50は、図4の流れ図200により全体的に示すように、周波数応答スケジュール及び/又は速度制限スケジュールに応じて、発電機46がその出力を増加又は減少させることにより応答するようにすることができる。流れ図200は、発電機46の出力を制御するために周期的に(例えば、1ミリ秒、5ミリ秒、10ミリ秒、30ミリ秒、1秒、5秒、10秒、30秒、1分、5分、10分、30分、1時間毎など、又は周波数外乱が起こったとみなされるときはいつでも)反復することができる反復処理を示す。したがって、汎用性周波数コントローラ50は、図3を参照して上述した(1つ又は複数の)フィードバック信号184を表すことができる周波数信号202を受け取ることができる。周波数信号202は、電力グリッド12の周波数を表し、標準動作状態の下で、ほぼ一定の公称値(例えば、通常50Hz又は60Hz)を維持すべきである。電力グリッド12の周波数外乱が起こったことを周波数信号202が示すかどうか、及び/又は周波数外乱が起こった範囲に少なくとも部分的に基づいて、汎用性周波数コントローラ50は、発電機46が1次周波数応答を実行するようにすることができる。以下に説明するように、汎用性周波数コントローラ50は、最終目標寄与電力だけでなく、接近速度及び/又は到達時間も制御する方法で、周波数外乱に対する1次周波数応答を制御することができる。
【0036】
具体的には、汎用性周波数コントローラ50は、フィルタ要素204、周波数応答スケジュール要素206、及び可変速度制限装置要素208を介して、流れ図の図4により表される処理を実行することができ、フィルタ要素204、周波数応答スケジュール要素206、及び可変速度制限装置要素208は共同で、1次周波数応答中の発電機46により出力される電力が、必ずしも最大可能速度で増加又は減少するのではなく、特定のパターンに従うようにさせる。すなわち、フィルタ要素204、周波数応答スケジュール要素206、及び速度制限装置要素208は、発電機46が、例えば同じもしくは異なるタイプの別の発電機46、電圧低下応答、又は緊急応答などをシミュレートすることにより、周波数外乱に応答することを可能にすることができる。さらに、フィルタ要素204、周波数応答スケジュール要素206、及び速度制限装置要素208は、ハードウェア、プロセッサ実行可能命令、又はハードウェアとプロセッサ実行可能命令との組合せを使用して、汎用性周波数コントローラ50内に実装することができる。フィルタ要素204は、周波数信号202を受け取り、周波数信号202が周波数帯域(例えば不感帯域)内又はその外にあるかどうかを判定することができる。したがって、フィルタ要素204は、ある周波数帯域内の周波数を遮断し、不感帯域外の周波数のみを通過させる不感帯域フィルタとして機能することができる。例えば、不感帯域周波数範囲は、約60Hz+/−10mHz、60Hz+/−20mHz、60Hz+/−25mHz、もしくは60Hz+/−30mHz、又は他の任意の適当な不感帯域範囲とすることができる。したがって、不感帯域周波数範囲が、約60Hz+/−20mHzであるとき、60Hz+/−20mHzの範囲内のどの周波数も、フィルタにより汎用性周波数コントローラ50を通過することを遮断される。
【0037】
周波数信号202が、フィルタ要素204により遮断されないとき、周波数応答スケジュール要素206は、周波数信号202を応答電力信号と関連付ける。周波数応答スケジュール要素206は、例えば、周波数信号202の可能な値に対応する応答電力信号を含む、参照表又はリストを含むことができる。周波数応答スケジュール要素206は、発電機46及び電力系統40に固有の変数(例えば、最大発電機出力、現発電機出力、パーセント寄与量など)の組合せを使用して計画することができる。
【0038】
それに加えて、周波数応答スケジュール要素206は、汎用性周波数コントローラ50の異なる実施形態で異なる可能性がある。いくつかの実施形態では、周波数が不感帯域周波数範囲外にあるとき、周波数応答スケジュール要素206は、示された最終目標寄与電力に周波数を線形的に関連付けることができる。例えば、周波数応答スケジュール要素206が周波数を最終目標寄与電力に関連付けることができる1つの方法のグラフ表示を含む、図5及び以下のその関連説明を参照されたい。さらに、電圧低下状態などの特定の状態が起こるとき、特定の周波数応答スケジュール206を使用することができる。いくつかの実施形態では、汎用性周波数コントローラ50は、複数の周波数応答スケジュール要素206を含むことができることに留意されたい。
【0039】
周波数応答スケジュール要素206が、最終目標出力を決定すると、速度制限装置要素208は、速度制限スケジュールに応じて、応答電力信号の変化速度を制限する。したがって、速度制限装置要素208は、周波数応答スケジュール要素206からの最終目標寄与電力、及び周波数外乱が最初に検出されて以降に経過した時間量に少なくとも部分的に基づき、目標電力信号210を指示する速度制限スケジュール(速度表など)に応じて動作することができる。それに加えて、又はその代わりに、速度制限装置要素208の速度制限スケジュールは、目標電力信号210を生成するために、利用可能な総寄与電力のパーセンテージとしての最終目標寄与電力を時間スケジュールに関連付けることができる。
【0040】
いくつかの例を提供すれば、特定の状態(電圧低下状態など)が起こるとき、又は特定の発電機46(電力グリッド12の別の発電機46など)の1次周波数応答をシミュレートするとき、特定の速度制限スケジュールを使用する特定の速度制限装置要素208を使用することができる。いくつかの実施形態では、汎用性周波数コントローラ50は、複数の速度制限装置要素208を含むことができ、及び/又は、速度制限装置要素208は、複数の速度制限スケジュールを含むことができる。
【0041】
上述のように、速度制限装置要素208は、即時目標寄与電力210を出力する。システムにより要求される電力を表す即時目標寄与電力210及びメガワット需要量213が、発電機46の現出力を表す、メガワット検知214の信号に加算212されるとき、メガワット需要量制御誤差216の信号が生じる。このメガワット需要量制御誤差216の信号は、発電機46の出力を制御するのに使用される。具体的には、メガワット需要量制御誤差216の信号は、発電機46の出力に対する増加量又は減少量を表す。
【0042】
上述のように、図4の流れ図の動作は、周期ベースで反復的に繰り返すことができる。したがって、各反復回で、周波数信号202が同じままで、したがって、周波数応答スケジュール要素206により示される最終目標寄与電力が同じままであることができても、時間が変化するとき、速度制限装置要素208は、異なる値の即時目標寄与電力210を出力することができる。具体的には、図6及び7を参照して以下に説明するように、速度制限装置要素208は、変化する値の即時目標寄与電力210を出力して、制御された接近速度及び/又は到達時間を有する1次周波数応答を発電機46がもたらすようにすることができる。
【0043】
図5は、最終目標寄与電力値を決定する、汎用性周波数コントローラ50の周波数応答スケジュール要素206が使用することができる周波数応答スケジュール218の一例の図である。図5の周波数応答スケジュール218では、x軸は、グリッド周波数219を表すが、y軸は、最終目標寄与電力220を表す。したがって、線221は、グリッド周波数219に応じて提供するように発電機46を制御することができる最終目標寄与電力220を表す。線221は、全体的に垂直な領域223及び224により境界を付けられる、全体的に水平な領域222を含む。線221は、領域222、223、及び224を取り囲む、線221の両側では全体的に直線的に示されるが、いくつかの実施形態では、線221は、直線的でない可能性がある。
【0044】
全体的に水平な領域222は、周波数219が領域223と224との間の周波数範囲内(例えば、不感帯域内)であるとき、通常示される寄与電力220を表す。したがって、不感帯域周波数範囲内で、最終目標寄与電力220は、約0MWとすることができる。すなわち、電力グリッドの公称周波数(例えば、50Hz又は60Hz)に等しい周波数219に対応する入力グリッド周波数225では、最終目標寄与電力226は、0MWとすることができる。不感帯域周波数範囲外の入力グリッド周波数227であれば、対応する最終目標寄与電力228は、0MW未満又は0MWを上回ることができる。
【0045】
言い換えれば、図5の周波数応答スケジュール218は、周波数外乱が起こるとき、寄与電力降下としてもたらす、最終目標寄与電力を表す。例えば、周波数応答スケジュール218は、番号225で示される公称周波数(例えば、50Hz又は60Hz)と共に、様々な周波数の、示された最終目標寄与電力を表すことができる。図5の周波数応答スケジュール218は、特定の周波数(例えば、公称周波数225の±2.5%、±5%、±10%、又は±16%)において到達する、最大及び最小の最終目標寄与電力を指示することができる。すなわち、電力グリッド12の周波数が、ある値又はパーセンテージだけ降下したとき、(発電機46が出力する電力の増加量を表す)最大最終目標寄与電力を示し、電力グリッドの周波数が、ある値又はパーセンテージだけ上昇したとき、(発電機46が出力する電力の減少量を表す)最小最終目標電力を指示することができる。
【0046】
一例を提供すれば、例えば、発電機46の総出力容量が100MWであり、現公称出力が50MWであるとき、周波数降下が起これば、発電機46は、50MWの追加に寄与する能力を有することができる。周波数応答スケジュール218は、例えば5%の周波数降下が起こるとき、最大最終目標寄与電力を指示することができる。したがって、周波数219が5%以上降下するとき、周波数応答スケジュール218は、50MWの最大最終目標寄与電力(つまり、50MWの増加量、すなわち合計100MW)を指示することができる。周波数が他のある量227(例えば1%だけ)降下するとき、周波数応答スケジュール218は、最終目標寄与電力228(例えば、最大値の1/5、すなわち10MWの最終目標寄与電力)を指示することができる。同様に、周波数が2%だけ降下するとき、周波数応答スケジュール218は、20MWの最終目標寄与電力などを指示することができる。周波数応答スケジュール218の他の実施形態は、線形又は非線形である可能性があることを理解されたい。
【0047】
汎用性周波数コントローラ50の速度制限装置要素208により使用される速度制限スケジュール230の実施形態は、図6に表す。速度制限スケジュール230は、周波数応答スケジュール要素206により決定される時間及び最終目標寄与電力の関数としての即時目標寄与電力210(すなわち、特定の接近速度及び/又は到達時間に対応するように、所与の瞬間にもたらされる寄与電力量)を表す。すなわち、速度制限スケジュール230は、周波数応答スケジュール要素206からの最終目標寄与電力に少なくとも部分的に基づいて、時間の関数として即時目標寄与電力210を指示することができる。速度制限スケジュール230では、y軸234は、メガワット目標寄与量を表し、x軸232は、最後に検出された周波数外乱の開始以降の時刻を表す。したがって、曲線236は、発電機46に提供される即時目標寄与電力210を、周波数外乱の開始時に始まる時刻と関連付ける。図6の例では、曲線236は、開始時刻242から比較的急激に増加し、終了時刻244まで緩やかに最終目標寄与電力に接近し、終了時点を超えて、周波数外乱が続く限り、即時目標寄与電力210は、通常、最終目標寄与電力に等しくなる可能性がある。例えば、時刻238では、速度制限スケジュール230は、最大許容寄与電力240の即時目標寄与電力210を指示する。時刻244では、速度制限スケジュール230は、最終目標寄与電力に等しくなる可能性がある、最大許容寄与電力246の即時目標寄与電力210を指示する。
【0048】
速度制限装置要素208は、様々な形状、接近速度、及び/又は到達時間を有する、他の機能的形態の速度制限スケジュールを使用することができる。実際に、図7に示すように、緊急状態の下で緊急応答を提供する緊急応答速度表に、速度制限スケジュール260を使用することができる。あるいは、発電機46が蒸気発電機などの他の発電機の1次周波数応答を模倣するようにするのに、速度制限スケジュール260を使用することができる。速度制限スケジュール260は、速度制限スケジュール230と同様に、周波数応答スケジュール要素206により決定される時間及び最終目標寄与電力の関数として速度制限装置要素208により出力される、即時目標寄与電力210を表す。すなわち、速度制限スケジュール230は、周波数応答スケジュール要素206からの最終目標寄与電力に少なくとも部分的に基づいて、時間の関数として即時目標寄与電力210を指示することができる。
【0049】
速度制限スケジュールでは、y軸264は、メガワット目標を表し、x軸262は、周波数外乱の開始以降の時刻を表す。したがって、曲線266は、発電機46に提供される即時目標寄与電力210を、周波数外乱の開始時に始まる時刻と関連付ける。図7の例では、曲線266は、通常、1次周波数応答中に蒸気発電機により実行される、同じパターンの出力に全体的に従う。しかし、その代わりに、曲線266は、他の形状、接近速度、及び/又は到達時間を有することができることを理解されたい。図7からわかるように、曲線266は、終了時刻274で最終目標寄与電力に到達するまで、開始時刻272から特定の関数に従って増加し、終了時点を超えて、周波数外乱が続く限り、即時目標寄与電力210は、通常、最終目標寄与電力に等しくなる可能性がある。例えば、時刻268では、速度制限スケジュール260は、最大許容寄与電力270の即時目標寄与電力210を指示する。時刻274では、速度制限スケジュール260は、最終目標寄与電力に等しくなる可能性がある、最大許容寄与電力276の即時目標寄与電力210を指示する。
【0050】
速度制限装置要素208が使用することができる速度制限スケジュールのさらに他の例は、他のパターン及び/又は関数に従う可能性がある。具体的には、速度制限スケジュールの少なくとも1つの実施形態では、即時目標寄与電力210は、最終目標寄与電力の特定の値に関係なく、時間と共に線形的に最終目標寄与電力に向かって増加する可能性がある。そうした速度制限スケジュールは、周波数応答スケジュール要素206により決定される最終目標寄与電力に関係なく、一定の勾配(MW/s)を有する即時目標寄与電力210を指示することができる。他の実施形態は、最終目標寄与電力に応じて変化する勾配(MW/s)を有することができる。
【0051】
汎用性周波数コントローラ50は、様々な環境の下で使用することができる、様々な異なる1次周波数応答をもたらすことができる場合がある。例えば、図8は、汎用性周波数コントローラ50が少なくとも4つの異なる1次周波数応答をもたらすことができる、別の流れ図290を表す。他の実施形態は、より多い又はより少ない1次周波数応答をもたらすことができることを理解されたい。図4の流れ図200と同様に、流れ図290は、汎用性周波数コントローラ50が発電機46の出力を制御するために周期的に(例えば、1ミリ秒、5ミリ秒、10ミリ秒、30ミリ秒、1秒、5秒、10秒、30秒、1分、5分、10分、30分、1時間毎など、又は周波数外乱が起こったとみなされるときはいつでも)反復することができる反復処理を表す。流れ図290の様々な要素は、ハードウェア、プロセッサ実行可能命令、又はハードウェアとプロセッサ実行可能命令との組合せを使用して、汎用性周波数コントローラ50内に実装することができる。
【0052】
図8からわかるように、流れ図290は、フィルタ要素292、294、296、及び298と、周波数応答スケジュール要素300、302、304、及び306と、速度制限装置要素308、310、312、及び314とを含み、これらはそれぞれ、発電機46により出力される電力が、必ずしも単に最大可能速度で増加又は減少するのではなく、特定の1次周波数応答パターンに従うようにする。すなわち、フィルタ要素292、294、296、及び298と、周波数応答スケジュール要素300、302、304、及び306と、速度制限装置要素308、310、312、及び314とは、それらが同じ又は異なるそれぞれの不感帯域、周波数応答スケジュール、及び/又は速度制限スケジュールを使用することを除けば、図4のフィルタ要素204、周波数応答スケジュール要素206、及び速度制限装置要素208と全体的に同じ方法で、それぞれ機能することができる。
【0053】
したがって、速度制限装置要素308、310、312、及び314は、マルチプレクサ316に異なる即時目標寄与電力210の信号を提供することができる。応答決定論理回路318は、マルチプレクサ316を介して、適当な任意の数の因子に基づき、汎用性周波数コントローラ50により最終的に出力される目標メガワット寄与信号210を選択することができる。例えば、応答決定論理回路318は、オペレータオーバーライド320、時間322、周波数324、又は出力326などに少なくとも部分的に基づいて、どの即時目標寄与電力210を選択すべきかを決定することができる。他の任意の適当な因子を使用することができる。
【0054】
オペレータオーバーライド320の因子は、オペレータが特定のフィルタ要素、周波数応答スケジュール要素、及び速度制限装置要素をいつ選択したいかを指示することができる。そうした選択は、電力グリッド12の予測負荷、機能テスト、又はオペレータにより決定される他のいくつかの理由に基づいて決定することができる。応答決定論理回路318は、1日又は1年の別々の時間中(例えば、使用頻度がより低い時間に対する最大エネルギー使用時間中)に、フィルタ要素、周波数応答スケジュール要素、及び速度制限装置要素の異なる組合せを適用することができるように、時間322を使用することができる。例えば、フィルタ要素、周波数応答スケジュール要素、及び速度制限装置要素のある組合せを夜間に使用し、別の組合せを昼間に使用することができる。同様に、フィルタ要素、周波数応答スケジュール要素、及び速度制限装置要素のある組合せを、冬などの1年のある季節の間に使用することができるが、別の組合せは、夏などの1年の別に季節の間に使用される。
【0055】
それに加えて、どの組合せを使用すべきかを決定するために、グリッドの周波数324を使用することができる。例えば、周波数324が、急激に増加又は減少するとき、フィルタ、周波数応答スケジュール、及び速度制限装置のある組合せを使用することができるが、緩やかな周波数変化には、別の組合せを使用することができる。例えば、周波数324が閾値未満まで降下するとき、電圧低下状態が存在する可能性がある。したがって、電圧低下状態に適したフィルタ要素、周波数応答スケジュール要素、及び速度制限装置要素は、即時目標寄与電力210の信号を提供することができる。同様に、発電機46から利用可能な寄与電力量に少なくとも部分的に基づいて選択することができる、使用すべきフィルタ要素、周波数応答スケジュール要素、及び速度制限装置要素の組合せを決定するのに、発電機46の出力326を使用することができる。例えば、発電機46が、その最大容量近傍で電力を発生させているとき、ある組合せを使用することができるが、発電機46が最小容量近傍にあるとき、別の組合せを使用することができる。さらに、使用される組合せは、ベース負荷(例えば最小負荷)、中間負荷(例えば、標準動作負荷)、又はピーク負荷(例えば、最大負荷)などの負荷レベルに依存する可能性がある。
【0056】
本開示の技術的効果は、カスタマイズされた1次周波数応答をもたらすために、発電機を制御することを含む。例えば、電力グリッド周波数外乱が起こると直ちに、発電機コントローラは、最終目標寄与電力に到達するまで、時間と共に安定した速度(例えば、線形又は非線形速度)で増加する即時目標寄与電力を決定することができる。このように、発電機コントローラは、1次周波数応答の接近速度及び/又は到達時間を制御することができ、したがって、発電機の1次周波数応答が要望通りに変化するようにすることができる。例えば、発電機の1次周波数応答は、蒸気発電機などの別の発電機をシミュレートすることができ、又は、電力グリッドに存在する別の発電機と同じ応答パターンに全体的に従うことができる。
【0057】
この記載した説明は、最良の形態を含めて、本発明を開示し、さらに、当業者が、任意の装置又はシステムを作成及び使用し、組み込まれた任意の方法を実施することを含めて、本発明を実施することができるように、実施例を使用する。本発明の特許範囲は、特許請求の範囲により規定され、当業者が想到する他の実施例を含むことができる。そうした他の実施例は、それらが特許請求の範囲の文言と異ならない構成要素を有するとき、又は、それらが特許請求の範囲の文言と実質的な差がない均等な構成要素を含むとき、特許請求の範囲の範囲内にあるものとする。
【符号の説明】
【0058】
10 電気システム
12 電力グリッド
14 電力ユニット
16 分散負荷
18 電力ユニット
20 電力ユニット
22 電力ユニット
24 電力ユニット
26 電力ユニット
28 電力ユニット
30 負荷
32 負荷
34 負荷
36 負荷
38 負荷
40 電力系統システム
42 電力設備信号
44 駆動装置
46 発電機
48 調速機
50 汎用性周波数コントローラ
52 メガワットセンサ
54 保護制御装置
56 グリッドモニタ
58 故障モニタ
60 トリップモニタ
62 変動モニタ
64 送電線故障
66 第1の部分
68 第2の部分
70 トリップ
72 変動
100 タービン発電機システム
102 タービン発電機コントローラ
104 タービン発電機
108 タービンコントローラ
110 発電機コントローラ
112 ヒューマンマシンインターフェース
114 電力設備信号
116 電力設備
118 タービンモニタ
120 燃料制御装置
122 電力制御装置
124 保護制御装置
126 発電機モニタ
128 電圧制御装置
130 保護制御装置
140 タービン
142 圧縮機
144 発電機
146 シャフト
148 燃焼器
150 燃料ノズル
152 燃料
154 空気
156 高温燃焼ガス
158 上流吸気口
160 圧縮空気
180 概略図
188 メモリ
190 プロセッサ
192 記憶装置
200 流れ図
202 周波数信号
204 フィルタ要素
206 周波数応答スケジュール要素
208 可変速度制限装置要素
210 目標電力信号
212 加算
213 メガワット需要量
214 メガワット検知
216 メガワット需要量制御誤差
218 周波数応答スケジュール
219 グリッド周波数
220 最終目標寄与電力
221 線
222 水平な領域
223 垂直な領域
224 垂直な領域
225 入力グリッド周波数
226 最終目標寄与電力
227 入力グリッド周波数
228 目標電力寄与量
230 速度制限スケジュール
232 x軸
234 y軸
236 曲線
238 時刻
240 最大許容寄与電力
242 開始時刻
244 終了時刻
246 最大許容寄与電力
260 速度制限スケジュール
262 x軸
264 y軸
266 曲線
268 時刻
270 最大許容寄与電力
272 開始時刻
274 終了時刻
276 最大許容寄与電力
290 別の流れ図
292 フィルタ要素
294 フィルタ要素
296 フィルタ要素
298 フィルタ要素
300 周波数応答スケジュール要素
302 周波数応答スケジュール要素
304 周波数応答スケジュール要素
306 周波数応答スケジュール要素
308 速度制限装置要素
310 速度制限装置要素
312 速度制限装置要素
314 速度制限装置要素
316 マルチプレクサ
318 応答決定論理回路
320 オペレータオーバーライド
322 時間
324 周波数
326 出力
【特許請求の範囲】
【請求項1】
発電機(46)用のコントローラ(50)であって、
電力グリッド周波数信号(202)を受け取り、前記周波数信号(202)が周波数帯域外であるとき、前記周波数信号(202)を出力するように構成されるフィルタ要素(204)と、
前記フィルタリングされた周波数信号(202)に少なくとも部分的に基づいて最終目標寄与電力を決定するように構成される周波数応答スケジュール要素(206)であって、前記最終目標寄与電力は、前記発電機(46)が1次周波数応答において提供すべき最終電力寄与量を表す、周波数応答スケジュール要素(206)と、
時間と共に変化し、速度制限スケジュールに少なくとも部分的に基づいて前記最終目標寄与電力に接近する即時目標寄与電力信号(210)を決定及び提供するように構成される可変速度制限装置要素(208)であって、前記即時目標寄与電力信号は、前記発電機(46)が、前記即時目標寄与電力信号に対応する量だけ前記発電機(46)により出力される電力を増加又は減少させるようにするように構成される、可変速度制限装置要素(208)とを備える、コントローラ(50)。
【請求項2】
前記発電機(46)は、航空機転用タービン発電機を含む、請求項1記載のコントローラ。
【請求項3】
前記フィルタ要素(204)は、前記周波数信号(202)が不感帯域周波数範囲外であるとき、前記周波数信号(202)を出力するように構成される不感帯域フィルタを含む、請求項1記載のコントローラ。
【請求項4】
前記周波数応答スケジュール要素(206)、前記速度制限装置要素(208)、又はその両方は、前記即時目標寄与電力信号(210)が前記発電機(46)に前記電力グリッドの別の発電機をシミュレートさせるように構成される、請求項1記載のコントローラ。
【請求項5】
前記周波数応答スケジュール要素(206)、前記速度制限装置要素(208)、又はその両方は、前記即時目標寄与電力信号(210)が前記発電機(46)に蒸気発電機をシミュレートさせるように構成される、請求項1記載のコントローラ。
【請求項6】
前記即時目標寄与電力信号(210)をメガワット需要信号(213)に加算し、メガワット検知信号(214)を差し引き、メガワット需要量制御誤差信号(216)をもたらすように構成される加算装置(212)を含む、請求項1記載のコントローラ。
【請求項7】
前記可変速度制限スケジュールは、前記即時目標寄与電力信号(210)、前記最終目標寄与電力、及び前記周波数信号(202)の変化が前記周波数帯域外になった後の時間を関連付ける、請求項1記載のコントローラ。
【請求項8】
トルクを発生させるように構成されるガスタービン(140)と、
前記ガスタービン(140)に結合する発電機(144)であって、前記トルクに基づいて電力グリッド(40)に電力を提供するように構成される、発電機(144)と、
前記ガスタービン(140)と結合するコントローラ(102)であって、複数の即時目標寄与電力信号(210)の1つに少なくとも部分的に基づき、前記電力グリッド(40)の周波数信号(202)に対する1次周波数応答として、前記ガスタービン(140)が前記トルクを変化させるようにするように構成される、コントローラ(102)と
を含む、システムであって、前記コントローラ(102)が、
前記周波数信号(202)を受け取り、前記周波数信号(202)が周波数帯域外であるとき、前記周波数信号(202)を出力するように構成される、1つ又は複数の周波数フィルタ要素(292、294、296、298)と、
前記周波数信号(202)を受け取り、それぞれの最終目標寄与電力信号を出力するようにそれぞれが構成される、1つ又は複数の周波数応答スケジュール要素(300、302、304、306)であって、最終目標寄与電力信号のそれぞれは、前記発電機(144)が1次周波数応答において提供すべき最終電力寄与量を表す、1つ又は複数の周波数応答スケジュール要素(300、302、304、306)と、
それぞれの最終目標寄与電力信号を受け取り、速度制限スケジュールに少なくとも部分的に基づいて前記複数の即時目標寄与電力信号(210)の1つを決定するようにそれぞれが構成される、1つ又は複数の速度制限装置要素(308、310、312、314)であって、前記複数の即時目標寄与電力信号のそれぞれは、前記発電機(144)が、前記発電機(144)により出力される電力を、この即時目標寄与電力信号(210)により指示されるレベルまで増加又は減少させるようにするように構成される、1つ又は複数の速度制限装置要素(308、310、312、314)とを含む、システム。
【請求項9】
前記コントローラ(102)は、前記発電機(144)の前記1次周波数応答が少なくとも部分的に基づく前記複数の即時目標寄与電力信号(210)の1つのユーザ選択(320)を可能にするように構成される選択要素(316)を含む、請求項8記載のシステム。
【請求項10】
前記コントローラ(102)は、前記発電機(144)の前記1次周波数応答が少なくとも部分的に基づく前記複数の即時目標寄与電力信号(210)の1つの選択を、応答決定論理回路(318)を介して可能にするように構成される選択要素(316)を含む、請求項8記載のシステム。
【請求項1】
発電機(46)用のコントローラ(50)であって、
電力グリッド周波数信号(202)を受け取り、前記周波数信号(202)が周波数帯域外であるとき、前記周波数信号(202)を出力するように構成されるフィルタ要素(204)と、
前記フィルタリングされた周波数信号(202)に少なくとも部分的に基づいて最終目標寄与電力を決定するように構成される周波数応答スケジュール要素(206)であって、前記最終目標寄与電力は、前記発電機(46)が1次周波数応答において提供すべき最終電力寄与量を表す、周波数応答スケジュール要素(206)と、
時間と共に変化し、速度制限スケジュールに少なくとも部分的に基づいて前記最終目標寄与電力に接近する即時目標寄与電力信号(210)を決定及び提供するように構成される可変速度制限装置要素(208)であって、前記即時目標寄与電力信号は、前記発電機(46)が、前記即時目標寄与電力信号に対応する量だけ前記発電機(46)により出力される電力を増加又は減少させるようにするように構成される、可変速度制限装置要素(208)とを備える、コントローラ(50)。
【請求項2】
前記発電機(46)は、航空機転用タービン発電機を含む、請求項1記載のコントローラ。
【請求項3】
前記フィルタ要素(204)は、前記周波数信号(202)が不感帯域周波数範囲外であるとき、前記周波数信号(202)を出力するように構成される不感帯域フィルタを含む、請求項1記載のコントローラ。
【請求項4】
前記周波数応答スケジュール要素(206)、前記速度制限装置要素(208)、又はその両方は、前記即時目標寄与電力信号(210)が前記発電機(46)に前記電力グリッドの別の発電機をシミュレートさせるように構成される、請求項1記載のコントローラ。
【請求項5】
前記周波数応答スケジュール要素(206)、前記速度制限装置要素(208)、又はその両方は、前記即時目標寄与電力信号(210)が前記発電機(46)に蒸気発電機をシミュレートさせるように構成される、請求項1記載のコントローラ。
【請求項6】
前記即時目標寄与電力信号(210)をメガワット需要信号(213)に加算し、メガワット検知信号(214)を差し引き、メガワット需要量制御誤差信号(216)をもたらすように構成される加算装置(212)を含む、請求項1記載のコントローラ。
【請求項7】
前記可変速度制限スケジュールは、前記即時目標寄与電力信号(210)、前記最終目標寄与電力、及び前記周波数信号(202)の変化が前記周波数帯域外になった後の時間を関連付ける、請求項1記載のコントローラ。
【請求項8】
トルクを発生させるように構成されるガスタービン(140)と、
前記ガスタービン(140)に結合する発電機(144)であって、前記トルクに基づいて電力グリッド(40)に電力を提供するように構成される、発電機(144)と、
前記ガスタービン(140)と結合するコントローラ(102)であって、複数の即時目標寄与電力信号(210)の1つに少なくとも部分的に基づき、前記電力グリッド(40)の周波数信号(202)に対する1次周波数応答として、前記ガスタービン(140)が前記トルクを変化させるようにするように構成される、コントローラ(102)と
を含む、システムであって、前記コントローラ(102)が、
前記周波数信号(202)を受け取り、前記周波数信号(202)が周波数帯域外であるとき、前記周波数信号(202)を出力するように構成される、1つ又は複数の周波数フィルタ要素(292、294、296、298)と、
前記周波数信号(202)を受け取り、それぞれの最終目標寄与電力信号を出力するようにそれぞれが構成される、1つ又は複数の周波数応答スケジュール要素(300、302、304、306)であって、最終目標寄与電力信号のそれぞれは、前記発電機(144)が1次周波数応答において提供すべき最終電力寄与量を表す、1つ又は複数の周波数応答スケジュール要素(300、302、304、306)と、
それぞれの最終目標寄与電力信号を受け取り、速度制限スケジュールに少なくとも部分的に基づいて前記複数の即時目標寄与電力信号(210)の1つを決定するようにそれぞれが構成される、1つ又は複数の速度制限装置要素(308、310、312、314)であって、前記複数の即時目標寄与電力信号のそれぞれは、前記発電機(144)が、前記発電機(144)により出力される電力を、この即時目標寄与電力信号(210)により指示されるレベルまで増加又は減少させるようにするように構成される、1つ又は複数の速度制限装置要素(308、310、312、314)とを含む、システム。
【請求項9】
前記コントローラ(102)は、前記発電機(144)の前記1次周波数応答が少なくとも部分的に基づく前記複数の即時目標寄与電力信号(210)の1つのユーザ選択(320)を可能にするように構成される選択要素(316)を含む、請求項8記載のシステム。
【請求項10】
前記コントローラ(102)は、前記発電機(144)の前記1次周波数応答が少なくとも部分的に基づく前記複数の即時目標寄与電力信号(210)の1つの選択を、応答決定論理回路(318)を介して可能にするように構成される選択要素(316)を含む、請求項8記載のシステム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【公開番号】特開2013−48541(P2013−48541A)
【公開日】平成25年3月7日(2013.3.7)
【国際特許分類】
【外国語出願】
【出願番号】特願2012−153242(P2012−153242)
【出願日】平成24年7月9日(2012.7.9)
【出願人】(390041542)ゼネラル・エレクトリック・カンパニイ (6,332)
【Fターム(参考)】
【公開日】平成25年3月7日(2013.3.7)
【国際特許分類】
【出願番号】特願2012−153242(P2012−153242)
【出願日】平成24年7月9日(2012.7.9)
【出願人】(390041542)ゼネラル・エレクトリック・カンパニイ (6,332)
【Fターム(参考)】
[ Back to top ]