
白米及び玄米の外観品位測定方法
【課題】白米又は玄米試料が供給されると、コンピューターシステムが自動的に試料の外観品位を判別して、その個数及び構成割合を表示する、白米等の外観品位の判別において、数十個の試料を連続的に供給しても、それぞれの試料一粒ずつの品位を判別することができる、白米等の外観品位を測定する方法を提供すること。
【手段】試料台の上に置かれた白米等をカメラで撮影する工程と;原画像をフレームグラバーによってRGB又はYUVモデルに該当するデータ形態で保存する工程と;保存された画像を二進化する工程と;二進化された画像を等高線形の2次元画像を作る工程と;前記2次元画像を3次元化して、境界線を抽出する工程と;前記境界線を基準にして接している白米等の画像を分離し、それぞれの画像に対してラベリングをする工程と;ラベリングされた各画像を分析して完全米、粉状質の米、屑米、ひびわれ米、着色米等の中の一つ以上の割合及び個数を判定する工程とからなることを特徴とする白米及び玄米の外観品位測定方法。
【手段】試料台の上に置かれた白米等をカメラで撮影する工程と;原画像をフレームグラバーによってRGB又はYUVモデルに該当するデータ形態で保存する工程と;保存された画像を二進化する工程と;二進化された画像を等高線形の2次元画像を作る工程と;前記2次元画像を3次元化して、境界線を抽出する工程と;前記境界線を基準にして接している白米等の画像を分離し、それぞれの画像に対してラベリングをする工程と;ラベリングされた各画像を分析して完全米、粉状質の米、屑米、ひびわれ米、着色米等の中の一つ以上の割合及び個数を判定する工程とからなることを特徴とする白米及び玄米の外観品位測定方法。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、白米と玄米の外観品位を評価する方法に関するものであって、特に、一定量の米に含まれた完全米と、粉状質の米、屑米、着色米及びひび割れ米などの割合と玄米に含まれた完全玄米と粉状質玄米、屑米、着色玄米、未熟玄米などの割合を自動的に判定できるようにした白米及び玄米の外観品位測定方法に関する。
【背景技術】
【0002】
大韓民国は、長年の稲栽培の歴史を持っていながらも米を思う存分食べることができるようになったのは、僅か20年余前からである。ところが、最近は絶対的な米消費量の減少と共に毎年のような豊作及びミニマムアクセス(MMA:Minimum Market Access)の輸入物量の増加などによって大韓民国内の米在庫量が急激に増加しているのが実情である。これによって2005年末には大韓民国の米在庫量が千万俵を超えるようになった。また、大韓民国の米は米国や中国などで生産する米に比べて生産費が顕著に高くて価格競争力が低下している。
【0003】
一方、最近大韓民国の国家経済の発展と国民の食生活の変化により上質米に対する選好度が高くなって、高品質な米の生産の必要性が増大している。特に、大韓民国の米が外国産の米に比べて価格競争力が低いという状況から、大韓民国の米を守るためには何よりも消費者の嗜好に合う高品質米を生産することが重要な課題として提起された。
【0004】
米の品質は最終的に栄養と味などが重要視されるが、米の利用方法や米を取り扱う主体によっては米の外観を品質評価の対象とする場合が多い。このような米の外観品質と関連するものは、米に含まれた完全米、屑米、粉状質の米、着色米などの割合である。これらは、米の商品性は勿論、ご飯の味にも影響を与えるものとして知られている。そして、大韓民国の農林部では米の品質を3つの等級に分けている(農林部告示第2005-59号)。各等級は、水分、屑米、粉状質の米、被害粒、熱損粒及び異物の含量等の、米の外観品質を基準にして区分されている。
【0005】
一方、米の外観品質の評価は一般的に試験者の目視によって行われている。しかしながら、目視による判定に基づいて得られる結果は、一般的に検査者の熟練度及び個人的な偏見、疲労、照明の種類及び明るさなどによって影響を受ける。これらが理由となり、判定の客観性が低く、迅速な判定が難しいばかりでなく、多くの労力と時間が消費される。よって、迅速且つ客観的に米の外観品質を評価することができる機械装置の開発が要求されている。
【0006】
現在外国では、米を1粒ずつ供給しながら米の画像を撮影し、その画像をコンピューターで分析して外観品質を評価する機械装置が使用されており、韓国国内にも多数普及している。しかし、これらの装置は、目視判定よりは早いものの、比較的所要時間が長く、精度が低い上、価格が高いという問題がある。
【0007】
マシンビジョン(Machine Vision)は画像処理技術及びパターン認識技術をコンピユーター技術と合成させてなるものである。マシンビジョンは農食品加工工程に利用され得る潜在力の高い技術であって、マシンビジョンを農食品の品質検査と等級化に応用するための多くの研究が行なわれている。従来、農食品の品質検査は目視検査に依存してきたが、殆どの場合、目視検査は長時間を必要とし、多くの人員を必要とする上、作業の精度も低下する傾向にある。これとは対照的にマシンビジョンを利用した農食品の検査は遥かに一貫的で便利であり、費用効率が高いことが証明された(Lu et at.,2000;Tao et al.,1995)。
【0008】
マシンビジョンを利用する場合、カメラで画像を撮影して、これをコンピユーターが認識できるデジタル画像に変換させる画像撮影過程、及びデジタル画像を分析して必要な情報を抽出する画像分析過程とに大きく分けることができる。
【0009】
画像撮影が成功するか否かは、基本的に適切な照明に係っている。照明の特性などは対象物及び使用される画像撮影装置の特性によって変わる。照明装置としては、蛍光灯、ハロゲン灯、LED等の多様な形態のものを使用でき、対象物に光を当てて照らす方向によって正面照明、後面照明、傾斜照明などの方法が使用される。画像装置は、フォトダイオード又はCCD(Charge Coupled Device)などの光学装置を使用した点センサー、線センサー、面センサー等の、センサー上に結像する画像を走査して画像を電気信号に変換する。ここで得られたアナログ画像信号は、x及びy方向に空間サンプリングされた後、A/D変換によってデジタル画像信号に変換される。A/D変換後の画像データは、一つの画像フレームとしてフレームバッフアー(Frame buffer)に保存される。フレームバッフアーはリアルタイムで画像化してデイスプレーすることができる。
【0010】
マシンビジョンを応用する目的は、得られた画像から必要な情報を抽出することにある。このために、マシンビジョンによって得られた原画像を、所望する信号に関連する形式に処理する作業が行われる。これを画像処理(Image Processing)という。即ち、画像内に含まれているノイズの除去、画像が有する特徴の抽出などのために種々の操作を行なうことである。このような画像処理過程においては、画像が有する情報を変換せず、対比強調、角強調、ノイズ除去、尖鋭化、拡大などの技法を使用し、画像が有する重要な特徴を強調する。
【0011】
画像分割(Image Segmentation)とは、画像から必要な情報を抽出するために対象物体を背景から分離させる作業である。例えば、米の画像から背景を分離し、米の画像のみを抽出することである。画像分割が終わった画像は、後処理に適合した形態で表現される。表現方法には外的特性(境界)の表現と内的特性(画素)の表現方法がある。これらの方法においては、画像を2次元的な数式や関数又は特別な表示子を利用して表示する。2次元空間における画像は、領域、境界線又は輪郭線などで表示することができる。領域は、輪郭、木目、色などの性質が類似又は同一の部分を区分して表示した、画像の一部分である。境界線とは、物体の輪郭を求める過程から浮き彫りになるか又は種々の区画方法によって得られる境界線を言う。
【0012】
画像処理装置(Image Processor)は、特定の画像処理を高速で実行する専用のハードウエアーであって、画像取り込み、画像保存、低級画像の処理、画像展示のような基本機能を行なう。画像処理、多数個の画像を処理したり、又は、正確かつ高速で画像を処理したりするのに必要である。殆どの画像処理は、一つの画面を単位フレーム時間(約1/30秒)でデジタル化する。
【0013】
穀物に対してマシンビジョンを利用して形態的・光学的・組織的特性を測定・分類するために多くの研究がなされてきた。Zayas(1996)らは小麦の品種識別に、Ruan(1997)らは小麦の腐敗病感染程度の測定に、Ni(1997)らはとうもろこし粒子のサイズ計測に、XieとPaulsen(1997)はとうもろこしの白色度測定に、Niら(1997)はとうもろこしの完全粒と屑粒の識別に、SteenhoekとPrecetti(2000)はとうもろこしサイズの等級化に、Liuら(1997)は米の搗精度測定に、YadavとJindal(2001)は米の搗精品質測定に、Majumdar(1997)らは小麦・麦・オート麦・ライ麦の識別のためにマシンビジョンを応用する研究を行なった。
【0014】
しかしながら、これらの研究では、個々の穀粒が互いに接触しないで広く散らばるようにするために、手作業で穀粒をカメラの下に揃えながら外観を撮影した。このような問題を解決するために、CasadyとPaulsen(1989)、Jayas(1999)らは穀粒を一個ずつ自動で供給する装置を開発したが、測定装置が複雑且つ高価であり、測定に長時間かかるという問題がある。
【0015】
このような問題の解決のために、互いに接触している状態で供給された穀粒の外観を、カメラで撮影した後、全体的な画像から個々の穀粒の画像をソフトウェア(software)的に分離することにより必要な情報を抽出・分析するための、画像処理アルゴリズムの開発が模索されている。このようなアルゴリズムの開発は、マシンビジョンを利用した穀粒検査装置の自動化と単純化に寄与するものと期待されている。
【0016】
これに関する研究として、Shatadalら(1995)は、穀粒の画像を浸食(Erision)させた後に、膨張(Dilation)させることにより、接触部分の境界線を求める数学的形態学(Mathematical Morphology)を利用する画像処理アルゴリズムを開発した。このアルゴリズムによれば、個々の粒を分離して認識する割合が、HRSとDurum小麦では95%、麦では94%、ライ麦では89%、オート麦では79%と表われ、穀粒の形が細く先が尖っているほど、又は、穀粒が長さ方向に多数接触していると、個々の粒の認識の精度が低くなると言われている。
【0017】
また、Shashidharら(1997)は、楕円フィッティング(Ellipse Fitting)法を用いて穀粒の形状に最も近似する楕円を作図し、それぞれの楕円を穀粒として認識する、コンピユーターアルゴリズムを開発した。そして、Visenら(2001)は、Shashidharらが開発した楕円フィッティング(Ellipse Fitting)法を使って、互いに接触している穀粒同士を、接触している楕円として認識させた後に、接触した楕円の外郭の曲率変化を比較・分析して接触点を見出し、分離させることによって個々の穀粒を認識するようにする、アルゴリズムを開発した。これを、小麦・麦・ライ麦・オート麦に対して実験した結果、平均98.6%の成功率を得た。
【0018】
しかしながら、このアルゴリズムによれば接触点での曲率の変化が明らかでなかったり、境界面が不規則で接触面が明確でなかったりすると、互いに接触した穀粒の画像から個々の穀粒を分離するときに、識別精度が劣ると言われている。また、これらの方法では、形状が似ている穀粒に対しては適用性が高いが、形状の異なる異種穀粒や割れた穀粒などが混入するか、穀粒が接している形が不規則で複雑であると、個々の穀粒を分離・認識する精度が低くなると言われている。
【発明の概要】
【発明が解決しようとする課題】
【0019】
本発明の目的は、前記した従来の問題点を解決するために案出されたものであって、白米及び玄米の外観品位を評価するに当って短い時間で高い判定精度を得るために、白米又は玄米を一粒ずつ供給する代りに数十粒の白米又は玄米をまとめて供給し、その白米又は玄米を一枚の画像に収めてコンピューター画像処理によってソフトウェア的に一粒ずつの外観品位を分析する方法を提供することにある。
【0020】
稲を玄米又は米に加工すると、玄米には完全玄米、腹白玄米、着色玄米、割れ玄米、ひび割れ玄米などが含まれ、米には完全米、腹白米、着色米、割れ米、ひび割れ米などが含まれる。完全米又は完全玄米の割合の高いほど品位が優秀である。従って本発明は、白米又は玄米試料が供給されると、コンピューターシステムが自動的に試料の外観品位を判別して、その個数及び構成割合を表示する、白米又は玄米の外観品位の判別において、試料を1粒ずつ供給して判別する既存のシステムとは異なり、数十個の試料を連続的に供給しても、それぞれの試料一粒ずつの品位を判別することができる、白米及び玄米の外観品位を測定する方法を提供することを目的とする。
【課題を解決するための手段】
【0021】
即ち本発明は、試料台の上に置かれた白米又は玄米をカメラで撮影する工程と;該前記カメラによって撮影された白米又は玄米の原画像をフレームグラバーによってRGB又はYUVモデルに該当するデータ形態で保存する工程と;保存された画像を二進化する工程と;
二進化された画像を最短距離に距離変換(Distance Transform)して等高線形の2次元画像を作る工程と;前記2次元画像を3次元化して、分岐点変換(Watershed Transform)を通じて境界線を抽出する工程と;前記境界線を基準にして接している白米又は玄米を分離し、それぞれの白米又は玄米に対してラベリングをする工程と;前記工程でラベリングされた各白米又は玄米を分析して完全米、粉状質の米、屑米、ひびわれ米、着色米、又は、完全玄米、粉状質の玄米、屑米、ひびわれ玄米、着色玄米の中の一つ以上の割合及び個数を判定する工程とからなることを特徴とする白米及び玄米の外観品位測定方法である。
【0022】
また、本発明の白米及び玄米の外観品位測定方法によれば、前記保存された画像を二進化する工程は、白米又は玄米と背景とを区分するための濃度の閾値を能動的に計算できるように、大津アルゴリズムを利用することを特徴とする。
【発明の効果】
【0023】
本発明の白米及び玄米の外観品位測定方法によって、機械的基準によって判別することにより、目視で判別するときに所要される労力と時間を節減すると共に、判別の客観性を確保することができるという効果がある。
【0024】
また、本発明の白米及び玄米の外観品位測定方法に従って白米及び玄米の外観品位を判別する場合には、白米又は玄米を一粒ずつ供給して判別する既存のシステムの場合とは異なり、数十個の白米又は玄米を連続的に供給しても、それぞれの白米又は玄米の粒の品位を判別できる。更に、白米又は玄米を一粒ずつ供給する装置が不要になるので、測定装置の製品価格を画期的に節減することができる上、数十個の米粒又は玄米粒を供給しながらリアルタイムで判別するので、判別時間も短縮できるという効果がある。
【図面の簡単な説明】
【0025】
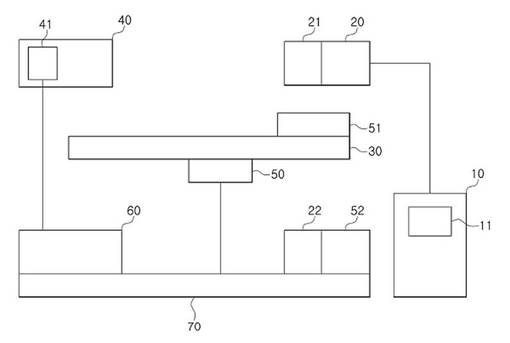
【図1】図1は、本発明による白米及び玄米の外観品位測定方法に使用する装置を概略的に示す構成図である。
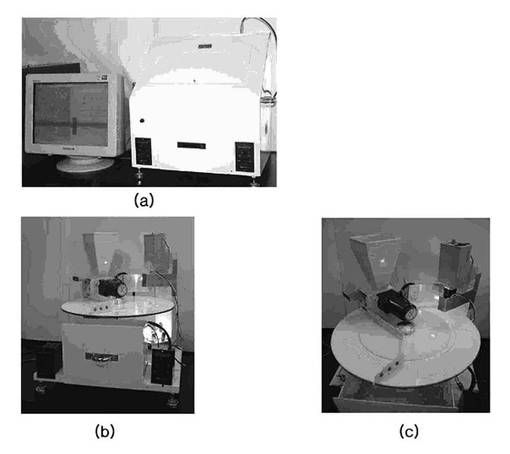
【図2】図2は、本発明の白米及び玄米の外観品位測定方法に使用する装置の試作機を示す実物写真である。
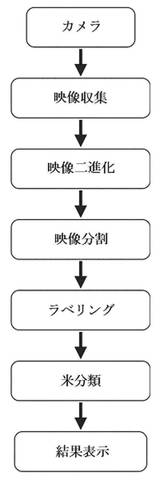
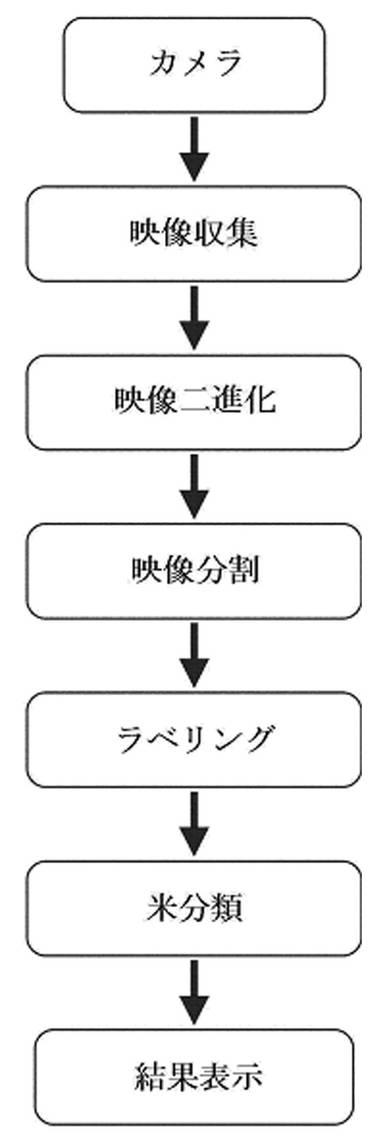
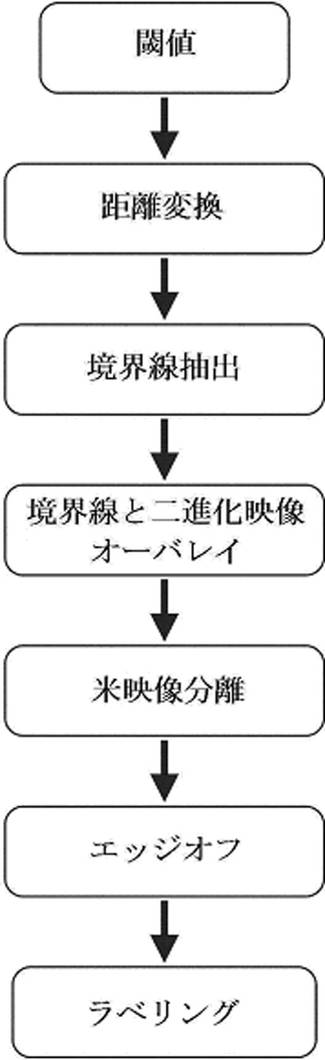
【図3】図3は、本発明の画像処理過程が示された順序図である。
【図4】図4は、本発明によるデジタル画像の濃度ヒストグラムが示されたグラフである。
【図5】図5は、接している試料の分離過程が示された順序図である。
【図6】図6は、大津アルゴリズムを使わないで二進化する過程が示された図面である。
【図7】図7は、大津アルゴリズムを使って二進化する過程が示された図面である。
【図8】図8は、距離変換過程が示された図面である。
【図9】図9は、接している試料の境界線を探していく過程が示された図面である。
【図10】図10は、接している試料の境界分離によるマップライン化過程が示された図面である。
【図11】図11は、割れた米の画像が示された図面である。
【図12】図12は、着色米と粉状質の米の画像が示された図面である。
【図13】図13は、完全米の画像が示された図面である。
【図14】図14は、ひびを探す過程が示された図面である。
【図15】図15は、割れた米の分析結果が示された図面である。
【図16】図16は、粉状質の米の分析結果が示された図面である。
【図17】図17は、着色米の分析結果が示された図面である。
【図18】図18は、完全米の分析結果が示された図面である。
【発明を実施するための形態】
【0026】
以下、添付された図面を参照して本発明に係る、白米及び玄米の外観品位測定方法について詳しく説明する。
【0027】
図1は、本発明に係る白米及び玄米の外観品位測定方法に使用する装置を概略的に示した構成図である。図2は、本発明の白米及び玄米の外観品位測定方法に使用する試作機の実物写真である。図3は、本発明の画像処理過程を示した順序図である。図4は、本発明に係るデジタル画像の濃度ヒストグラムを示したグラフである。図5は、接している米の分離過程が示された順序図である。図6は、大津アルゴリズムを使用しないで二進化する過程を示した図面である。図7は、大津アルゴリズムを使用して二進化する過程を示した図面である。図8は、距離変換過程を示した図面である。図9は、接している米の境界線を探していく過程を示した図面であり、図10は、接している米の境界分離によるマップライン化過程を示した図面である。
【0028】
本発明に係る白米及び玄米の外観品位測定方法に使用する装置は、透明又は半透明材質からなる、上面に白米又は玄米試料が置かれる試料台30と;前記試料台30の下部に設置され、前記試料台30を回転させる回転円板50と;前記試料台30の上部に設置され、試料台30に白米又は玄米を供給する供給筒40及び前記供給筒40の内部に設けられて前記試料台30に供給される白米又は玄米の量を調節する回転ロール41と;前記試料台30の上下側に、それぞれ前記試料台30から離間して設置され、白米又は玄米を照明する上部照明21及び下部照明22と;前記試料台30から上部側に離間して設置され、前記試料台30上の白米又は玄米を撮影するCCDカメラ20と;画像処理プログラムを利用して、前記カメラ20によって撮影された画像を処理して、外観品位を判定するコンピューター10と;前記コンピューター10の内部に設けられ、前記カメラ20を制御するフレームグラバー11と;前記フレームグラバー11から前記カメラ20の作動状態に関する信号を受けて、前記供給筒40からの白米又は玄米供給速度及び前記回転円板50の回転速度を制御する速度調節機60と;前記試料台30の上面に設置された前記カメラ20によって撮影を終えた白米又は玄米を分離する排出分離板51と;前記試料台30の下部に設けられて前記排出分離板51によって分離された白米又は玄米を回収する収集筒52及びこれらの装置などを支持する支持台70を含んでなる。
【0029】
前記上部照明21は、前記下部照明22に比べて照度が高い。前記カメラ20は、レンズを調整して焦点距離を変化させることができると供に、上下方向に移動可能に設けられる。前記フレームグラバー11は、前記上部照明21及び下部照明22による明るさによって前記カメラ20のレンズを調節すると供に、前記供給筒40内部の回転ロール41を制御して白米又は玄米供給量を調節する。また、前記コンピューター10は、完全米、粉状質の米、屑米、ひび割れ米、着色米又は完全玄米、粉状質の玄米、屑米、ひび割れ玄米、着色玄米、未熟玄米の内の一種以上の割合又は個数を測定して、白米及び玄米全体の外観品位を自動で判定する。
【0030】
前記コンピューター10が白米及び玄米の外観品位を判定する過程は次の通りである。
【0031】
試料台30上に置かれた白米又は玄米の試料を、カメラで撮影する。前記カメラ20によって撮影された試料の原画像を、フレームグラバー11によってRGB又はYUVモデルに該当するデータ形態で保存する。保存された画像を二進化する。二進化された画像を最短距離に距離変換(Distance Transform)して、等高線形の2次元画像を作成する。前記2次元画像を3次元化し、分岐点変換(Watershed Transform)を通じて境界線を抽出する。前記境界線を基準にして接している試料等を分離させ、それぞれの試料に対するラベリングを実施し、ラベリングされた各試料を分析して、完全米、粉状質の米、屑米、ひび割れ米、着色米又は完全玄米、粉状質の玄米、屑米、ひび割れ玄米、着色玄米、未熟玄米の内の一種以上の割合及び個数を判定する。
【0032】
前記保存された画像を二進化するためには、試料と背景とを区分するための濃度の閾値を能動的に計算できるように、大津アルゴリズムを利用することが好ましい。
【0033】
以下に、前記の一般的な構成を具体化して、本発明の白米及び玄米の外観品位測定方法の実験例について説明する。
【0034】
1.実験材料
実験に使う米として、米穀総合処理場で加工された米(2002年産)を、加工現場で目視検査によって、完全粒(Sound kernel)、屑米(Broken kernel)、粉状の粒(Chalky kernel)、着色粒(Colored kernel)に分類して採取した。米品位区分の基準は、大韓民国農林部で告示した標準規格に基づく。完全粒は、米の外観特性上、割れていない米と、割れた米であっても完全粒の平均長さの3/4以上の形態を有しているものの内、粉状質の粒、熱損粒、被害粒を除いたものとし、個々の粒の平均長さは完全粒15個以上を計測して算出した。屑米は、韓国産業規格KS A 5101標準篩の内、呼び寸法1.7mmの網篩でふるって篩の上に残るものの中、完全粒の平均長さの3/4未満に割れた粒とした。粉状質の粒は体積の1/2以上が粉状質状態の粒とした。着色粒は、被害粒、熱損粒等、及び、粒長さの1/4以上が着色された粒とした。
【0035】
2.外観品位判定装置
米の外観品位測定のため、照明装置、画像処理装置及び米供給/排出装置を有する外観品質判定装置を製作した。図1と図2を参照して装置の構成について説明する。
【0036】
A.照明装置
分析する米を載せる試料台30の上部に、上部照明21として12W容量の白熱燈1個を設置し、前記試料台30の下部に、下部照明22として4W容量の蛍光燈2個を設置した。前記米を、照明装置で照明した。この時、前記試料台30の下部から照射される下部照明22の光量を調節するために、試料台30を白色の半透明アクリル板で製作した。ここで、前記試料台30は透明又は半透明であることが好ましく、測定時の照明の明るさが変わると、測定結果に誤差が生ずることがあるので、測定の前に照明の明るさを測定して基準値と異なる場合にはカメラ20のレンズを調整して、明るさを基準値に合わせた。
【0037】
B.画像処理装置
画像処理装置は、カラーCCDカメラ20(LGハニウェル、GC-450NA-G)とフレームグラバー11(WDM方式、BT878chip使用、自作)及びPC10(ぺンティアムIV 2.0G、DDR-RAM 512MB)で構成した。検査に用いる画像処理装置は、供給された米の画像を、CCDカメラ20とPC10内に設けられたフレームグラバー11を用いて撮影し、撮影された画像を、PC10の画像処理プログラムで分析して保存するようにした。
【0038】
前記CCDカメラ20は、上下方向に移動して高さを調節できるようにし、焦点距離6mm、明るさF1.2のレンズを装着した。カメラ20の位置やレンズの変更等で米粒画像のサイズが変わると、測定結果に誤差が生ずる。よって、測定前にコインのサイズを測定し、基準サイズと異なる場合にはカメラ20の位置とレンズを調整して、サイズを基準値に合わせるようにした。
【0039】
前記フレームグラバー11は、Windows(登録商標)98に比べてRAMの認識限界がない(メインボードの仕様によって異なるが、最近DDR-RAM 4GB程度まで認識する)Windows(登録商標) 2000、及び、Windows(登録商標) XPのOSで使用可能になるように、WDM(Windows(登録商標) Driver Model)方式のBT878チップ(chip)を使って、自作したものを使用した。即ち、通常のフレームグラバーは、Windows(登録商標)98のOSを使い、128MB以上のRAMを使っても、128MBまでしか認識できないので、前記カメラ20から伝送された高容量(640×480×3=921600 Bytes)の画像データを処理するには、長時間を要する。
【0040】
また、一般の安価なTVカードの撮影機能を利用したVFW(Video For Window)方式でも撮影することが可能であるが、研究用に適合した640×480の解像度を有する画像を撮影するには時間が更にかかる。従って、VxD方式にのみ制限されたドライバーが提供されなければならない。ドライバーがVxD方式でない場合、320×240の解像度及びそれ以下の解像度で撮影が可能である。320×240以上の解像度を必要とする場合には、カード製造会社のAPIを知らなければならないので、実際に使用することは不可能である。そして、前記PC10の画像処理プログラムはMFC(Microsoft foundation Class Library)方式でビジュアル(Visual)C++言語を使用して作成した。
【0041】
C.米供給及び排出装置
試料を連続的に供給するための米供給装置は、回転ロール41によって一定量ずつ米を排出する米供給筒40と、供給された試料をカメラ20の下側に移送する回転円板50と、撮影が終わった試料を分離する排出分離板51と、これを収集する収集筒52とで構成した。このとき、前記カメラ20で画像を撮影する間に米が動くと、正確な画像を撮影することができなくなる。よって、画像を撮影する間は米の供給を止め、撮影が終わると再び供給するようにした。即ち、前記フレームグラバー11を、カメラ20の作動状態を感知して、電源供給リレーを0.001秒単位の間隔で開閉するように構成した。このために、米供給筒40の回転ロール41と米を移送する回転円板50を駆動するモーターの作動を制御した。供給される米の量を調節するために、速度調節機(speed controller)60で、米供給筒40の回転ロール41と移送回転円板50を駆動するモーターの回転数を、手動で調節するようにした。この場合、前記下部照明22、速度調節機60、収集筒52を支持台70の上に装着した。
【0042】
3.画像処理
画像処理とは、デジタル画像に対する最も基本的な処理であり、画像内に含まれているノイズの除去、画像が有する特徴の抽出及び各種基本操作を行なうフイルタリング操作等を行うものである。画像処理技法は、応用対象によって種々の形態に分類することが可能である。本発明では図3に示された手順によって画像処理を行い、一度に多数個ずつ供給される米の画像から一個ずつの米粒を分離して識別し、必要な情報を抽出した。
【0043】
A. 画像撮影
カラーCCDカメラ20で撮影された米の原画像は、フレームグラバー11によって640×480ピクセルのYUV2モデルに該当するデータ形態でメモリーに保存した。YUV2モデルのデータは、RGB24モデルのデータに変換されてバッファーに保存した。通常、カラー画像は、RGBの成分で表示するが、YUV形式で表示した理由は、画像を輝度成分と色差成分で表示すればRGBよりメモリーを效率的に使うことができ、また早い速度で処理することができるからである。YUV形式の場合にメモリーを效率的に使うことができる理由は、色差成分がそれぞれピクセルに対して与えられるものではなく、4個のピクセル当り1個の色差成分が与えられるからである。すなわち4:1:1のYUV形式の場合、画像を構成するピクセルを4個ずつ束ね、それぞれの輝度(Y)をサンプリングし、色差(U、V)としては4個のピクセルの平均値を取る。従って、ピクセルに4個の輝度と各1個ずつの色差(U、V)があるので、全体で6個のサンプルが得られる。従って、4個のピクセルにそれぞれ3個ずつの、全体で12個のサンプルがあるRGBの場合と比べると、メモリーを1/2に減らすことができる。ここで4:1:1ではなく、4:2:2であればYUV2モデルになる。
【0044】
B.二進化
これは、撮影された画像から、背景と分析対象物を分離することにより、特定情報を抽出するために、デジタル画像を黒色0と白色255の二つの値だけで表現する技法である。背景と分析対象物の特徴を分けるとき、明度の閾値(Threshold)を置く。閾値以下の値を0、閾値以上の値を1にすることにより、物体を容易に識別することができる。閾値の設定は、使用者の判断によって決まる場合もあり、動的閾値を判別する技法が利用される場合もある。前記外観品位判定装置においては、数十個の米をまとめて供給して一つの画像を撮影するので、供給される米の個数によって画像の明度が変わる。
【0045】
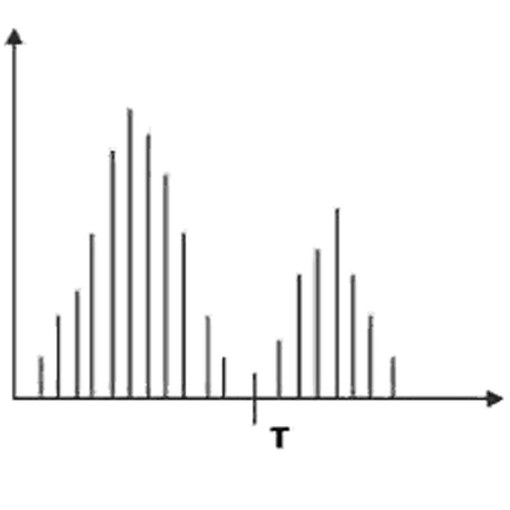
従って、固定された閾値を使うと、二進化に誤差が発生する。よって、大津(Otsu)法を使って動的閾値を判別するようにした。大津法は、大津が1979年に提案したアルゴリズムであり、今までにも多く参照されるアルゴリズムの一つであって、動的なイメージのヒストグラムから自動的に閾値を探し出す。大津法を概略的に説明すると次の通りである。0からL-1までのグレーレベル(Grey level)を有する画像のイメージが、図2のヒストグラムのような分布を表す時、0からL-1間の任意のグレーレベルをkとすると、kを基準にして、0からk点までの左側領域と、k+1からL-1までの右側領域に分けることができる。この時k値は、二つの領域の間の分散(σ2B(k))が最大になる点として決定される。
【数1】

【数2】
【0046】
ここで、kは任意の閾値、μTはヒストグラムの平均値、ω(k)は0次累積モーメント、μ(k)は1次累積モーメント、p(i)はヒストグラムの正規確率密度関数、n(i)はグレーレベルiにおけるピクセル(Pixel:画素)数、Nは総ピクセル数をそれぞれ意味する。
【0047】
この方法は、照明及びノイズなど外部的な要因から起因したヒストグラムの変化に従ってではなく、測定しようとする米の量が変わって米粒の明るさが変化する場合に変化するヒストグラムに従って、能動的に閾値を検出することができる。
【0048】
C.接している米の境界分離
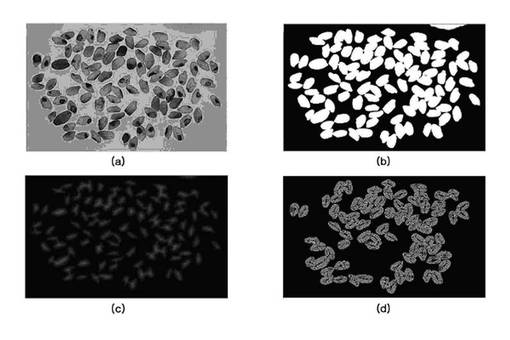
デジタル画像において、米を背景から分離しても多数個の米が互いに接している状態にあるので、個々の米粒の情報を抽出するためには、接している米を全て分離させて認識しなければならない。互いに接している米の境界を探して分離させるために、図3のように分岐点(Watershed)アルゴリズムを適用した。先ず、二進化された画像を3×3ユークリッドマスクを使って、外郭からの最短距離に距離変換(Distance Transform)した等高線状の画像を作る。
【0049】
分岐点変換(Watershed Transform)をするために、2次元の画像を3次元化した。3次元化した画像から接している米の稜線を判別して、追加の画像を作り、これを2進化された原画像と合成して、米が接している部分における境界線を付け、接している米粒を分離して、それぞれの米粒の画像を抽出した。
【0050】
次に、画像端部が擦り切れて破壊された画像、又は、小さい塵及び普通の米より大きい異物質等の、不必要な画像を消去(Edge off)した。選択された米粒の画像について、それぞれの米粒に、独立して区分するための認識番号を付与(Labeling)した。
【0051】
D.米の外観品質判定
米の外観品質の判定のための標準試料として活用するために、米を目視により、完全米、屑米、着色米、粉状質の米、ひびわれ米に分類した。これらの標準試料を、前記米外観品質判定装置を使用して画像を撮影し、外観品質判定に使う画像データを抽出した。本発明においては、米の外観品質判定のために、長軸長さ、短縮長さ、幅、面積、周囲の長さ、赤色(Red)、緑色(Green)、青色(Blue)、青緑色(Cyan)、赤紫色(Magenta)、黄色(Yellow)、黒色(Black)、色相(Hue Value)、彩度(Saturation)、濃度(Intensity)の平均及び標準偏差などの画像データを抽出して用いた。
【0052】
3.米の外観品質判定アルゴリズム
A.画像の二進化と米の明るさ変化の補正
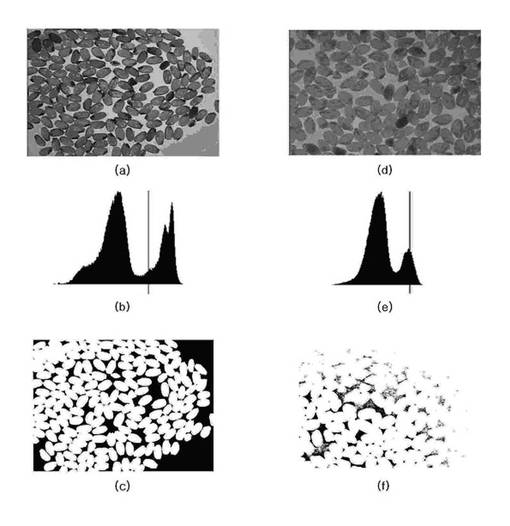
デジタル画像から米と背景とを分離するときに、図4に示すように、明るさが互いに異なる2つの画像に対して閾値T=165を適用して二進化すると明るさが変化するので、米と背景とが明確に分離されなくなるため、明るさの変化に従って閾値を変更しなければならない。これは、供給される米の量に依存する各米の明るさの変化によって、強度ヒストグラムが変化して生じる現象である。
【0053】
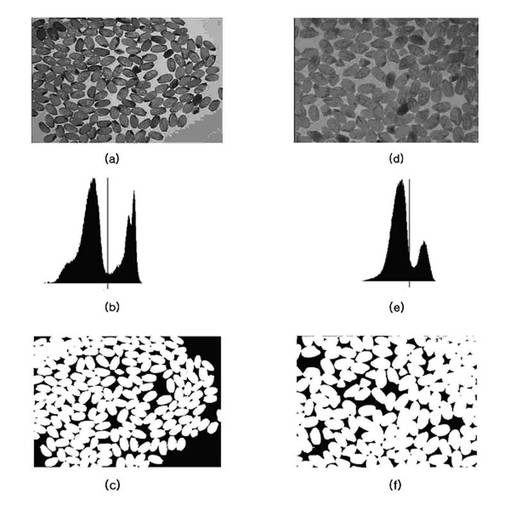
これを防止するために、大津アルゴリズムを利用して、米と背景とを区分するための濃度の閾値を能動的に計算するコンピュータープログラムを作成した。図7は、大津アルゴリズムを利用して、明るさが互いに異なる2個の画像に対して計算された閾値と、二進化された結果を表わしたものである。大津アルゴリズムを利用することにより、米と背景とを区分するための濃度閾値を能動的に計算することができる。大津アルゴリズムを使わないで二進化した結果を表した図6と比べると、二進化の性能が改善されたことを確認することができる。
【0054】
B.接している米の境界分離
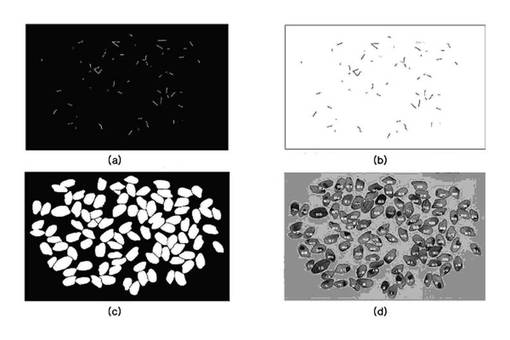
デジタル画像で米を背景から分離させても、多数個の米が互いに接している状態である。よって、個々の米粒の情報を抽出するためには、接している米をすべて分離させて認識する必要がある。接している米の境界を探して分離させるために、距離変換(Distance transform)及び分岐点変換(Watershed transform)アルゴリズムを適用した。図8は距離変換の過程を表わしたものである。図8(b)のような二進化画像から、図8(d)のような等高線状をした距離マップ(Distance map)を作成した。
【0055】
米粒同士が重なっている場合、その境界を分けるために図8(d)のような距離マップの画像から分岐点変換によって図9(a)のように境界線を抽出する。これを流域分割と言い、距離変換を利用した分割、傾きを利用した分割、マーカー制御を利用した分割があるが、本発明では距離変換による流域分割(valley segmentation)を用いた。このように得られた流域稜線(valley ridge)の画像を反転(Inverse)させた後、二進画像と接合(And)させれば、接している米の境界線が離れて認識される。図9は、接している米の境界線を探し出す過程を示した図である。
【0056】
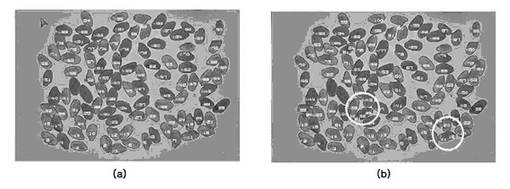
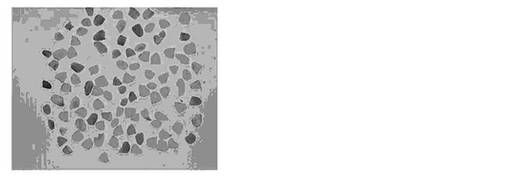
流域稜線(valley ridge)を探し出す正確度は、距離マップの間隔からも多くの影響を受ける。即ち、距離マップの間隔があまり大きいと、流域稜線の検出が困難になる。距離マップの間隔があまり詰まっていると、図10(b)のように、正常な米の画像を幾つかに分離する結果をもたらす。
【0057】
ここで、それぞれの米粒を分析するために、図9(d)のように、米粒を独立に区分して名前を与えることをラベリングと言う。 このために各ピクセルが互いに離れているのか接しているのかを判断し、離れている画素には違う名前を、接しているピクセルには同じ名前を付与する。
本発明では繰り返し(recursive)成分ラベリングアルゴリズムを用いた。
【0058】
C.米の外観品位判定
ラべリング(labeling)で米に番号が付与され、それぞれの米の面積を計算するが、屑米であるか否かは、米の面積を基準に判定した。一般的に米の面積は米の画像が占めるピクセルの個数をすべて合わせたものと同じである。従って、米のピクセル数が米の面積となり、本発明では、米の画像のピクセル数が1,000以下である場合に屑米と判定した。図11は、本実施例における米外観品位判定装置で撮影した屑米の画像を示した図である。
【0059】
粉状質の米と着色米は、米の画像の色情報を比べて判定した。まず、粉状質の米はRGB色座標において、Red値>Blue値であると共に、Red値>Yellow値である場合に粉状質の米として区分した。しかしながら、完全米の一部が粉状質の米に判別される場合がある。そこで、粉状質の米の中でGreen値-Black値>6,000である場合は、完全米として区分した。一方、着色米はRed値>Blue値でありながらRed値<Yellow値であるか着色ピクセル数が30以上であれば、着色米として区分した。しかしながら、一部の粉状質の米の中でも着色米として判別される場合がある。そこで、着色米の中でYellow値-Red値が5000以上であり、(着色ピクセル数)X3<(白ピクセル数)である場合は、粉状質米として区分した。
【0060】
図12は、本発明の米外観品位判定装置で撮影した、粉状質の米と着色米の画像を示す図である。割れ米、着色米又はひび割れ米でないものは、完全米として判別した。また完全米の中で、ひびがある米をひびわれ米として判定した。
【0061】
ひびわれ米の判定にはエッジ(edge)判別法を用いた。すなわち、ひびわれ米は、米表面にひびがある部分の明るさが、他の部分の明るさと差があることを利用して識別した。このため、カメラで撮った画像からそれぞれの米粒の画像を分離して、米一粒ごとに一つの画像を作った。そして、米の長軸が水平方向に対して傾いた角度(orientation angle)を計算した後に、長軸が水平になるように米粒を回転させて配列させ、垂直エッジ判別演算子を利用して、垂直エッジ成分を抽出した。
【0062】
しかしながら、抽出された垂直エッジ成分のすべてがひびの成分であるということはないので、垂直成分を厚くするために、垂直強化フイルタリングを行った。ひびの成分を分離するために、平均−標準偏差値を使って二進化した。次に、シニング(thinning)を行って、厚いひびの成分を薄くした。純粋なひびの画像を作成するために、小さいひびを取り除いた。原画像とひびの画像を合成して、米にひびを示した。
【0063】
図13は、本発明の米外観品位判定装置で撮影した、完全米の画像を表わしたものである。この場合に、ひびを検出するために作成されたアルゴリズムによって処理する過程を、図14に表わした。
【0064】
4.搗精品位自動判定機の製作
A.搗精品位自動判定機の構造
図1及び図2に示した構成の米搗精品位自動判定機を製作した。本発明の米の搗精品位測定装置は、米を供給して画像を撮影する駆動部と、撮影された画像を分析するコンピューターで構成されている。駆動部は、回転ロール41を具備して米を一定量ずつ供給する米供給筒40と、供給された米を、CCDカメラ20の下部に移送させる半透明アクリルで作った回転円板(Φ500mm)50で構成された。前記回転円板50の上に試料台30が装着され、上部照明21として米を照明する12W容量の白熱燈1個、及びCCDカメラ20(LGハニウェル、GC-450NA-G)が装着された。
【0065】
前記CCDカメラ20には、前面に焦点距離6mm、明るさF1.2のレンズが取り付けられており、焦点と光量を調節することができる。前記CCDカメラ20は、上下方向に高さを調節できるように製作した。また、画像撮影が終わった米を排出するための排出分離板51と収集筒52を設置し、前記回転円板50の下部にも、下部照明22として4W容量の照明用蛍光燈2個を設けた。前記米供給筒40の回転ロール41及び前記回転円板50の速度を調節するために、速度調節機60を取り付けた。
【0066】
試作機に使われたコンピューター10はペンティアム(登録商標)IV(2,0G、DDR2-RAM512M)であり、O/SとしてはWindows(登録商標) XPを使った。試作機の作動方法は、米供給筒40に測定する米を入れた後、回転円板(50)の作動スィッチを押して、一番前に供給された米がCCDカメラ20の下部に供給された後、回転円板50の作動を止める。そして、コンピューターモニターで明るさ測定モードを押して明るさが基準範囲内にあるかを確認する。その後、開始ボタンを押すと、自動で米が供給されながら分析される。測定される間、米の画像と分析結果がリアルタイムでモニターに表示される。分析が終わると、結果値をモニターに表示しながら、テキストファイルでデータがコンピューターの保存装置に保存される。コンピューター内に内蔵したフレームグラバー11は、Windows(登録商標) 2000、Windows(登録商標) XPのOSで使用可能になるように、WDM(Windows(登録商標) Driver Model)方式のBT878チップ(chip)を使って自作した。画像処理プログラムは、MFC(Microsoft Foundation Class Library)方式でビジュアル(Visual)C++言語を使って作成した。
【0067】
B.米外観品位判定性能
多様な形態と色の米を任意に調合し、供給された米を試作機を使って分析した結果、接している米等を、ソフトウェア的に分離させて個別に認識する精度は98%であった。この精度は、Visenら(2001)が楕円合わせ法(ellipse fitting method)を使って、小麦・麦・ライ麦・オート麦に関して、接触している穀粒などを、個々の穀粒に認識した時の精度が平均98.6%であったという研究結果と比べて、はるかに改善されたと判断された。即ち、Visenらの研究結果は、接触点での曲率変化が明確でなかった場合、又は、互いに接触した穀粒の画像から個々の穀粒を分離する時に、境界面が不規則で接触面が明確でなかった場合には、識別精度が下がり、また、これらの方法は、形状が似ている穀粒に対しては適用させることができるが、形状が異なる異種穀粒又は割れた穀粒などが混入すると、又は、穀粒が接している形が不規則的で複雑になると、個々の穀粒を分離・認識する精度が低下したりしたからである。
【0068】
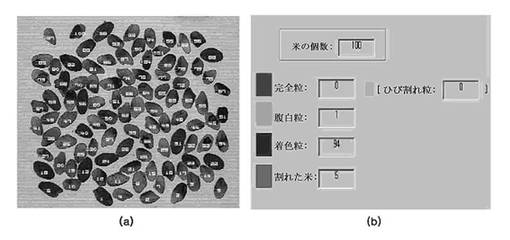
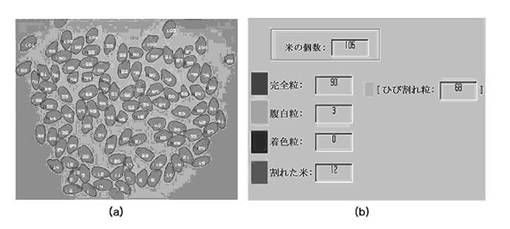
試作機は屑米を100%判定することができた。図15に割れた米を分析した結果を表わした。図16に粉状質の米94個と屑米6個を分析した結果を表わした。粉状質の米の中で、1個が完全米と判別されたことから、判別正確度は98.9%であった。図17は着色米95個と屑米5個を分析した結果を表わし、着色米の中で1個が粉状質の米と判別されたことから、判別正確度は98.9%であった。図18は完全米93個と割れた米12個を分析した結果を表わす。完全米の中で3個が粉状質の米と判別されたことから、判別の正確度は96.8%であった。また、完全粒の目視判別によると、ひび割れ米の個数は73個であったのに対し、試作機による判別結果は68個であり、判別正確度は93.2%であった。
【0069】
また、100粒の米粒を判定するのに所要された時間は約15秒であった。これは、既存の判定方法による時間に比べて非常に短く、優秀である。本発明の判定方法を使用することにより、既存の製品より構成が簡単であり、製作費用も安価な装置とすることができる。
【産業上の利用可能性】
【0070】
本発明の白米及び玄米の外観品位測定方法によれば、目視で判別する時の労力と時間を節減することができるだけでなく、機械的基準によって判別するので、判別の客観性を確保することができるという効果がある。
【0071】
また、本発明の白米及び玄米の外観品位測定方法によれば、白米又は玄米を1粒ずつ供給して判別する既存のシステムとは異なり、数十個の白米又は玄米を連続的に供給してそれぞれの白米又は玄米の粒の品位が判別できる上、白米又は玄米を1粒ずつ供給する装置が不必要になるので、製品価格を画期的に低減することができると供に、数十個の米粒又は玄米粒を供給しながらリアルタイムで判別するので、判別時間も短縮することができるという効果がある。
【0072】
以上、本発明の好ましい実施例を説明したが、本発明は、玄米は勿論、小麦や麦、オート麦及びライ麦等、その他の穀物の外観品位判定にも適用することができる。そして、本発明の範囲はこのような特定の実施例によって限定されず、該当分野で通常の知識を有する者であれば、本発明の特許請求範囲内に記載された範疇で、適切に変更することが可能である。
【符号の説明】
【0073】
10:コンピューター
11:フレームグラバー
20:CCDカメラ
21:上部照明
22:下部照明
30:試料台
40:供給筒
41:回転ロール
50:回転円板
51:排出分離板
52:収集筒
60:スピードコントロール
【技術分野】
【0001】
本発明は、白米と玄米の外観品位を評価する方法に関するものであって、特に、一定量の米に含まれた完全米と、粉状質の米、屑米、着色米及びひび割れ米などの割合と玄米に含まれた完全玄米と粉状質玄米、屑米、着色玄米、未熟玄米などの割合を自動的に判定できるようにした白米及び玄米の外観品位測定方法に関する。
【背景技術】
【0002】
大韓民国は、長年の稲栽培の歴史を持っていながらも米を思う存分食べることができるようになったのは、僅か20年余前からである。ところが、最近は絶対的な米消費量の減少と共に毎年のような豊作及びミニマムアクセス(MMA:Minimum Market Access)の輸入物量の増加などによって大韓民国内の米在庫量が急激に増加しているのが実情である。これによって2005年末には大韓民国の米在庫量が千万俵を超えるようになった。また、大韓民国の米は米国や中国などで生産する米に比べて生産費が顕著に高くて価格競争力が低下している。
【0003】
一方、最近大韓民国の国家経済の発展と国民の食生活の変化により上質米に対する選好度が高くなって、高品質な米の生産の必要性が増大している。特に、大韓民国の米が外国産の米に比べて価格競争力が低いという状況から、大韓民国の米を守るためには何よりも消費者の嗜好に合う高品質米を生産することが重要な課題として提起された。
【0004】
米の品質は最終的に栄養と味などが重要視されるが、米の利用方法や米を取り扱う主体によっては米の外観を品質評価の対象とする場合が多い。このような米の外観品質と関連するものは、米に含まれた完全米、屑米、粉状質の米、着色米などの割合である。これらは、米の商品性は勿論、ご飯の味にも影響を与えるものとして知られている。そして、大韓民国の農林部では米の品質を3つの等級に分けている(農林部告示第2005-59号)。各等級は、水分、屑米、粉状質の米、被害粒、熱損粒及び異物の含量等の、米の外観品質を基準にして区分されている。
【0005】
一方、米の外観品質の評価は一般的に試験者の目視によって行われている。しかしながら、目視による判定に基づいて得られる結果は、一般的に検査者の熟練度及び個人的な偏見、疲労、照明の種類及び明るさなどによって影響を受ける。これらが理由となり、判定の客観性が低く、迅速な判定が難しいばかりでなく、多くの労力と時間が消費される。よって、迅速且つ客観的に米の外観品質を評価することができる機械装置の開発が要求されている。
【0006】
現在外国では、米を1粒ずつ供給しながら米の画像を撮影し、その画像をコンピューターで分析して外観品質を評価する機械装置が使用されており、韓国国内にも多数普及している。しかし、これらの装置は、目視判定よりは早いものの、比較的所要時間が長く、精度が低い上、価格が高いという問題がある。
【0007】
マシンビジョン(Machine Vision)は画像処理技術及びパターン認識技術をコンピユーター技術と合成させてなるものである。マシンビジョンは農食品加工工程に利用され得る潜在力の高い技術であって、マシンビジョンを農食品の品質検査と等級化に応用するための多くの研究が行なわれている。従来、農食品の品質検査は目視検査に依存してきたが、殆どの場合、目視検査は長時間を必要とし、多くの人員を必要とする上、作業の精度も低下する傾向にある。これとは対照的にマシンビジョンを利用した農食品の検査は遥かに一貫的で便利であり、費用効率が高いことが証明された(Lu et at.,2000;Tao et al.,1995)。
【0008】
マシンビジョンを利用する場合、カメラで画像を撮影して、これをコンピユーターが認識できるデジタル画像に変換させる画像撮影過程、及びデジタル画像を分析して必要な情報を抽出する画像分析過程とに大きく分けることができる。
【0009】
画像撮影が成功するか否かは、基本的に適切な照明に係っている。照明の特性などは対象物及び使用される画像撮影装置の特性によって変わる。照明装置としては、蛍光灯、ハロゲン灯、LED等の多様な形態のものを使用でき、対象物に光を当てて照らす方向によって正面照明、後面照明、傾斜照明などの方法が使用される。画像装置は、フォトダイオード又はCCD(Charge Coupled Device)などの光学装置を使用した点センサー、線センサー、面センサー等の、センサー上に結像する画像を走査して画像を電気信号に変換する。ここで得られたアナログ画像信号は、x及びy方向に空間サンプリングされた後、A/D変換によってデジタル画像信号に変換される。A/D変換後の画像データは、一つの画像フレームとしてフレームバッフアー(Frame buffer)に保存される。フレームバッフアーはリアルタイムで画像化してデイスプレーすることができる。
【0010】
マシンビジョンを応用する目的は、得られた画像から必要な情報を抽出することにある。このために、マシンビジョンによって得られた原画像を、所望する信号に関連する形式に処理する作業が行われる。これを画像処理(Image Processing)という。即ち、画像内に含まれているノイズの除去、画像が有する特徴の抽出などのために種々の操作を行なうことである。このような画像処理過程においては、画像が有する情報を変換せず、対比強調、角強調、ノイズ除去、尖鋭化、拡大などの技法を使用し、画像が有する重要な特徴を強調する。
【0011】
画像分割(Image Segmentation)とは、画像から必要な情報を抽出するために対象物体を背景から分離させる作業である。例えば、米の画像から背景を分離し、米の画像のみを抽出することである。画像分割が終わった画像は、後処理に適合した形態で表現される。表現方法には外的特性(境界)の表現と内的特性(画素)の表現方法がある。これらの方法においては、画像を2次元的な数式や関数又は特別な表示子を利用して表示する。2次元空間における画像は、領域、境界線又は輪郭線などで表示することができる。領域は、輪郭、木目、色などの性質が類似又は同一の部分を区分して表示した、画像の一部分である。境界線とは、物体の輪郭を求める過程から浮き彫りになるか又は種々の区画方法によって得られる境界線を言う。
【0012】
画像処理装置(Image Processor)は、特定の画像処理を高速で実行する専用のハードウエアーであって、画像取り込み、画像保存、低級画像の処理、画像展示のような基本機能を行なう。画像処理、多数個の画像を処理したり、又は、正確かつ高速で画像を処理したりするのに必要である。殆どの画像処理は、一つの画面を単位フレーム時間(約1/30秒)でデジタル化する。
【0013】
穀物に対してマシンビジョンを利用して形態的・光学的・組織的特性を測定・分類するために多くの研究がなされてきた。Zayas(1996)らは小麦の品種識別に、Ruan(1997)らは小麦の腐敗病感染程度の測定に、Ni(1997)らはとうもろこし粒子のサイズ計測に、XieとPaulsen(1997)はとうもろこしの白色度測定に、Niら(1997)はとうもろこしの完全粒と屑粒の識別に、SteenhoekとPrecetti(2000)はとうもろこしサイズの等級化に、Liuら(1997)は米の搗精度測定に、YadavとJindal(2001)は米の搗精品質測定に、Majumdar(1997)らは小麦・麦・オート麦・ライ麦の識別のためにマシンビジョンを応用する研究を行なった。
【0014】
しかしながら、これらの研究では、個々の穀粒が互いに接触しないで広く散らばるようにするために、手作業で穀粒をカメラの下に揃えながら外観を撮影した。このような問題を解決するために、CasadyとPaulsen(1989)、Jayas(1999)らは穀粒を一個ずつ自動で供給する装置を開発したが、測定装置が複雑且つ高価であり、測定に長時間かかるという問題がある。
【0015】
このような問題の解決のために、互いに接触している状態で供給された穀粒の外観を、カメラで撮影した後、全体的な画像から個々の穀粒の画像をソフトウェア(software)的に分離することにより必要な情報を抽出・分析するための、画像処理アルゴリズムの開発が模索されている。このようなアルゴリズムの開発は、マシンビジョンを利用した穀粒検査装置の自動化と単純化に寄与するものと期待されている。
【0016】
これに関する研究として、Shatadalら(1995)は、穀粒の画像を浸食(Erision)させた後に、膨張(Dilation)させることにより、接触部分の境界線を求める数学的形態学(Mathematical Morphology)を利用する画像処理アルゴリズムを開発した。このアルゴリズムによれば、個々の粒を分離して認識する割合が、HRSとDurum小麦では95%、麦では94%、ライ麦では89%、オート麦では79%と表われ、穀粒の形が細く先が尖っているほど、又は、穀粒が長さ方向に多数接触していると、個々の粒の認識の精度が低くなると言われている。
【0017】
また、Shashidharら(1997)は、楕円フィッティング(Ellipse Fitting)法を用いて穀粒の形状に最も近似する楕円を作図し、それぞれの楕円を穀粒として認識する、コンピユーターアルゴリズムを開発した。そして、Visenら(2001)は、Shashidharらが開発した楕円フィッティング(Ellipse Fitting)法を使って、互いに接触している穀粒同士を、接触している楕円として認識させた後に、接触した楕円の外郭の曲率変化を比較・分析して接触点を見出し、分離させることによって個々の穀粒を認識するようにする、アルゴリズムを開発した。これを、小麦・麦・ライ麦・オート麦に対して実験した結果、平均98.6%の成功率を得た。
【0018】
しかしながら、このアルゴリズムによれば接触点での曲率の変化が明らかでなかったり、境界面が不規則で接触面が明確でなかったりすると、互いに接触した穀粒の画像から個々の穀粒を分離するときに、識別精度が劣ると言われている。また、これらの方法では、形状が似ている穀粒に対しては適用性が高いが、形状の異なる異種穀粒や割れた穀粒などが混入するか、穀粒が接している形が不規則で複雑であると、個々の穀粒を分離・認識する精度が低くなると言われている。
【発明の概要】
【発明が解決しようとする課題】
【0019】
本発明の目的は、前記した従来の問題点を解決するために案出されたものであって、白米及び玄米の外観品位を評価するに当って短い時間で高い判定精度を得るために、白米又は玄米を一粒ずつ供給する代りに数十粒の白米又は玄米をまとめて供給し、その白米又は玄米を一枚の画像に収めてコンピューター画像処理によってソフトウェア的に一粒ずつの外観品位を分析する方法を提供することにある。
【0020】
稲を玄米又は米に加工すると、玄米には完全玄米、腹白玄米、着色玄米、割れ玄米、ひび割れ玄米などが含まれ、米には完全米、腹白米、着色米、割れ米、ひび割れ米などが含まれる。完全米又は完全玄米の割合の高いほど品位が優秀である。従って本発明は、白米又は玄米試料が供給されると、コンピューターシステムが自動的に試料の外観品位を判別して、その個数及び構成割合を表示する、白米又は玄米の外観品位の判別において、試料を1粒ずつ供給して判別する既存のシステムとは異なり、数十個の試料を連続的に供給しても、それぞれの試料一粒ずつの品位を判別することができる、白米及び玄米の外観品位を測定する方法を提供することを目的とする。
【課題を解決するための手段】
【0021】
即ち本発明は、試料台の上に置かれた白米又は玄米をカメラで撮影する工程と;該前記カメラによって撮影された白米又は玄米の原画像をフレームグラバーによってRGB又はYUVモデルに該当するデータ形態で保存する工程と;保存された画像を二進化する工程と;
二進化された画像を最短距離に距離変換(Distance Transform)して等高線形の2次元画像を作る工程と;前記2次元画像を3次元化して、分岐点変換(Watershed Transform)を通じて境界線を抽出する工程と;前記境界線を基準にして接している白米又は玄米を分離し、それぞれの白米又は玄米に対してラベリングをする工程と;前記工程でラベリングされた各白米又は玄米を分析して完全米、粉状質の米、屑米、ひびわれ米、着色米、又は、完全玄米、粉状質の玄米、屑米、ひびわれ玄米、着色玄米の中の一つ以上の割合及び個数を判定する工程とからなることを特徴とする白米及び玄米の外観品位測定方法である。
【0022】
また、本発明の白米及び玄米の外観品位測定方法によれば、前記保存された画像を二進化する工程は、白米又は玄米と背景とを区分するための濃度の閾値を能動的に計算できるように、大津アルゴリズムを利用することを特徴とする。
【発明の効果】
【0023】
本発明の白米及び玄米の外観品位測定方法によって、機械的基準によって判別することにより、目視で判別するときに所要される労力と時間を節減すると共に、判別の客観性を確保することができるという効果がある。
【0024】
また、本発明の白米及び玄米の外観品位測定方法に従って白米及び玄米の外観品位を判別する場合には、白米又は玄米を一粒ずつ供給して判別する既存のシステムの場合とは異なり、数十個の白米又は玄米を連続的に供給しても、それぞれの白米又は玄米の粒の品位を判別できる。更に、白米又は玄米を一粒ずつ供給する装置が不要になるので、測定装置の製品価格を画期的に節減することができる上、数十個の米粒又は玄米粒を供給しながらリアルタイムで判別するので、判別時間も短縮できるという効果がある。
【図面の簡単な説明】
【0025】
【図1】図1は、本発明による白米及び玄米の外観品位測定方法に使用する装置を概略的に示す構成図である。
【図2】図2は、本発明の白米及び玄米の外観品位測定方法に使用する装置の試作機を示す実物写真である。
【図3】図3は、本発明の画像処理過程が示された順序図である。
【図4】図4は、本発明によるデジタル画像の濃度ヒストグラムが示されたグラフである。
【図5】図5は、接している試料の分離過程が示された順序図である。
【図6】図6は、大津アルゴリズムを使わないで二進化する過程が示された図面である。
【図7】図7は、大津アルゴリズムを使って二進化する過程が示された図面である。
【図8】図8は、距離変換過程が示された図面である。
【図9】図9は、接している試料の境界線を探していく過程が示された図面である。
【図10】図10は、接している試料の境界分離によるマップライン化過程が示された図面である。
【図11】図11は、割れた米の画像が示された図面である。
【図12】図12は、着色米と粉状質の米の画像が示された図面である。
【図13】図13は、完全米の画像が示された図面である。
【図14】図14は、ひびを探す過程が示された図面である。
【図15】図15は、割れた米の分析結果が示された図面である。
【図16】図16は、粉状質の米の分析結果が示された図面である。
【図17】図17は、着色米の分析結果が示された図面である。
【図18】図18は、完全米の分析結果が示された図面である。
【発明を実施するための形態】
【0026】
以下、添付された図面を参照して本発明に係る、白米及び玄米の外観品位測定方法について詳しく説明する。
【0027】
図1は、本発明に係る白米及び玄米の外観品位測定方法に使用する装置を概略的に示した構成図である。図2は、本発明の白米及び玄米の外観品位測定方法に使用する試作機の実物写真である。図3は、本発明の画像処理過程を示した順序図である。図4は、本発明に係るデジタル画像の濃度ヒストグラムを示したグラフである。図5は、接している米の分離過程が示された順序図である。図6は、大津アルゴリズムを使用しないで二進化する過程を示した図面である。図7は、大津アルゴリズムを使用して二進化する過程を示した図面である。図8は、距離変換過程を示した図面である。図9は、接している米の境界線を探していく過程を示した図面であり、図10は、接している米の境界分離によるマップライン化過程を示した図面である。
【0028】
本発明に係る白米及び玄米の外観品位測定方法に使用する装置は、透明又は半透明材質からなる、上面に白米又は玄米試料が置かれる試料台30と;前記試料台30の下部に設置され、前記試料台30を回転させる回転円板50と;前記試料台30の上部に設置され、試料台30に白米又は玄米を供給する供給筒40及び前記供給筒40の内部に設けられて前記試料台30に供給される白米又は玄米の量を調節する回転ロール41と;前記試料台30の上下側に、それぞれ前記試料台30から離間して設置され、白米又は玄米を照明する上部照明21及び下部照明22と;前記試料台30から上部側に離間して設置され、前記試料台30上の白米又は玄米を撮影するCCDカメラ20と;画像処理プログラムを利用して、前記カメラ20によって撮影された画像を処理して、外観品位を判定するコンピューター10と;前記コンピューター10の内部に設けられ、前記カメラ20を制御するフレームグラバー11と;前記フレームグラバー11から前記カメラ20の作動状態に関する信号を受けて、前記供給筒40からの白米又は玄米供給速度及び前記回転円板50の回転速度を制御する速度調節機60と;前記試料台30の上面に設置された前記カメラ20によって撮影を終えた白米又は玄米を分離する排出分離板51と;前記試料台30の下部に設けられて前記排出分離板51によって分離された白米又は玄米を回収する収集筒52及びこれらの装置などを支持する支持台70を含んでなる。
【0029】
前記上部照明21は、前記下部照明22に比べて照度が高い。前記カメラ20は、レンズを調整して焦点距離を変化させることができると供に、上下方向に移動可能に設けられる。前記フレームグラバー11は、前記上部照明21及び下部照明22による明るさによって前記カメラ20のレンズを調節すると供に、前記供給筒40内部の回転ロール41を制御して白米又は玄米供給量を調節する。また、前記コンピューター10は、完全米、粉状質の米、屑米、ひび割れ米、着色米又は完全玄米、粉状質の玄米、屑米、ひび割れ玄米、着色玄米、未熟玄米の内の一種以上の割合又は個数を測定して、白米及び玄米全体の外観品位を自動で判定する。
【0030】
前記コンピューター10が白米及び玄米の外観品位を判定する過程は次の通りである。
【0031】
試料台30上に置かれた白米又は玄米の試料を、カメラで撮影する。前記カメラ20によって撮影された試料の原画像を、フレームグラバー11によってRGB又はYUVモデルに該当するデータ形態で保存する。保存された画像を二進化する。二進化された画像を最短距離に距離変換(Distance Transform)して、等高線形の2次元画像を作成する。前記2次元画像を3次元化し、分岐点変換(Watershed Transform)を通じて境界線を抽出する。前記境界線を基準にして接している試料等を分離させ、それぞれの試料に対するラベリングを実施し、ラベリングされた各試料を分析して、完全米、粉状質の米、屑米、ひび割れ米、着色米又は完全玄米、粉状質の玄米、屑米、ひび割れ玄米、着色玄米、未熟玄米の内の一種以上の割合及び個数を判定する。
【0032】
前記保存された画像を二進化するためには、試料と背景とを区分するための濃度の閾値を能動的に計算できるように、大津アルゴリズムを利用することが好ましい。
【0033】
以下に、前記の一般的な構成を具体化して、本発明の白米及び玄米の外観品位測定方法の実験例について説明する。
【0034】
1.実験材料
実験に使う米として、米穀総合処理場で加工された米(2002年産)を、加工現場で目視検査によって、完全粒(Sound kernel)、屑米(Broken kernel)、粉状の粒(Chalky kernel)、着色粒(Colored kernel)に分類して採取した。米品位区分の基準は、大韓民国農林部で告示した標準規格に基づく。完全粒は、米の外観特性上、割れていない米と、割れた米であっても完全粒の平均長さの3/4以上の形態を有しているものの内、粉状質の粒、熱損粒、被害粒を除いたものとし、個々の粒の平均長さは完全粒15個以上を計測して算出した。屑米は、韓国産業規格KS A 5101標準篩の内、呼び寸法1.7mmの網篩でふるって篩の上に残るものの中、完全粒の平均長さの3/4未満に割れた粒とした。粉状質の粒は体積の1/2以上が粉状質状態の粒とした。着色粒は、被害粒、熱損粒等、及び、粒長さの1/4以上が着色された粒とした。
【0035】
2.外観品位判定装置
米の外観品位測定のため、照明装置、画像処理装置及び米供給/排出装置を有する外観品質判定装置を製作した。図1と図2を参照して装置の構成について説明する。
【0036】
A.照明装置
分析する米を載せる試料台30の上部に、上部照明21として12W容量の白熱燈1個を設置し、前記試料台30の下部に、下部照明22として4W容量の蛍光燈2個を設置した。前記米を、照明装置で照明した。この時、前記試料台30の下部から照射される下部照明22の光量を調節するために、試料台30を白色の半透明アクリル板で製作した。ここで、前記試料台30は透明又は半透明であることが好ましく、測定時の照明の明るさが変わると、測定結果に誤差が生ずることがあるので、測定の前に照明の明るさを測定して基準値と異なる場合にはカメラ20のレンズを調整して、明るさを基準値に合わせた。
【0037】
B.画像処理装置
画像処理装置は、カラーCCDカメラ20(LGハニウェル、GC-450NA-G)とフレームグラバー11(WDM方式、BT878chip使用、自作)及びPC10(ぺンティアムIV 2.0G、DDR-RAM 512MB)で構成した。検査に用いる画像処理装置は、供給された米の画像を、CCDカメラ20とPC10内に設けられたフレームグラバー11を用いて撮影し、撮影された画像を、PC10の画像処理プログラムで分析して保存するようにした。
【0038】
前記CCDカメラ20は、上下方向に移動して高さを調節できるようにし、焦点距離6mm、明るさF1.2のレンズを装着した。カメラ20の位置やレンズの変更等で米粒画像のサイズが変わると、測定結果に誤差が生ずる。よって、測定前にコインのサイズを測定し、基準サイズと異なる場合にはカメラ20の位置とレンズを調整して、サイズを基準値に合わせるようにした。
【0039】
前記フレームグラバー11は、Windows(登録商標)98に比べてRAMの認識限界がない(メインボードの仕様によって異なるが、最近DDR-RAM 4GB程度まで認識する)Windows(登録商標) 2000、及び、Windows(登録商標) XPのOSで使用可能になるように、WDM(Windows(登録商標) Driver Model)方式のBT878チップ(chip)を使って、自作したものを使用した。即ち、通常のフレームグラバーは、Windows(登録商標)98のOSを使い、128MB以上のRAMを使っても、128MBまでしか認識できないので、前記カメラ20から伝送された高容量(640×480×3=921600 Bytes)の画像データを処理するには、長時間を要する。
【0040】
また、一般の安価なTVカードの撮影機能を利用したVFW(Video For Window)方式でも撮影することが可能であるが、研究用に適合した640×480の解像度を有する画像を撮影するには時間が更にかかる。従って、VxD方式にのみ制限されたドライバーが提供されなければならない。ドライバーがVxD方式でない場合、320×240の解像度及びそれ以下の解像度で撮影が可能である。320×240以上の解像度を必要とする場合には、カード製造会社のAPIを知らなければならないので、実際に使用することは不可能である。そして、前記PC10の画像処理プログラムはMFC(Microsoft foundation Class Library)方式でビジュアル(Visual)C++言語を使用して作成した。
【0041】
C.米供給及び排出装置
試料を連続的に供給するための米供給装置は、回転ロール41によって一定量ずつ米を排出する米供給筒40と、供給された試料をカメラ20の下側に移送する回転円板50と、撮影が終わった試料を分離する排出分離板51と、これを収集する収集筒52とで構成した。このとき、前記カメラ20で画像を撮影する間に米が動くと、正確な画像を撮影することができなくなる。よって、画像を撮影する間は米の供給を止め、撮影が終わると再び供給するようにした。即ち、前記フレームグラバー11を、カメラ20の作動状態を感知して、電源供給リレーを0.001秒単位の間隔で開閉するように構成した。このために、米供給筒40の回転ロール41と米を移送する回転円板50を駆動するモーターの作動を制御した。供給される米の量を調節するために、速度調節機(speed controller)60で、米供給筒40の回転ロール41と移送回転円板50を駆動するモーターの回転数を、手動で調節するようにした。この場合、前記下部照明22、速度調節機60、収集筒52を支持台70の上に装着した。
【0042】
3.画像処理
画像処理とは、デジタル画像に対する最も基本的な処理であり、画像内に含まれているノイズの除去、画像が有する特徴の抽出及び各種基本操作を行なうフイルタリング操作等を行うものである。画像処理技法は、応用対象によって種々の形態に分類することが可能である。本発明では図3に示された手順によって画像処理を行い、一度に多数個ずつ供給される米の画像から一個ずつの米粒を分離して識別し、必要な情報を抽出した。
【0043】
A. 画像撮影
カラーCCDカメラ20で撮影された米の原画像は、フレームグラバー11によって640×480ピクセルのYUV2モデルに該当するデータ形態でメモリーに保存した。YUV2モデルのデータは、RGB24モデルのデータに変換されてバッファーに保存した。通常、カラー画像は、RGBの成分で表示するが、YUV形式で表示した理由は、画像を輝度成分と色差成分で表示すればRGBよりメモリーを效率的に使うことができ、また早い速度で処理することができるからである。YUV形式の場合にメモリーを效率的に使うことができる理由は、色差成分がそれぞれピクセルに対して与えられるものではなく、4個のピクセル当り1個の色差成分が与えられるからである。すなわち4:1:1のYUV形式の場合、画像を構成するピクセルを4個ずつ束ね、それぞれの輝度(Y)をサンプリングし、色差(U、V)としては4個のピクセルの平均値を取る。従って、ピクセルに4個の輝度と各1個ずつの色差(U、V)があるので、全体で6個のサンプルが得られる。従って、4個のピクセルにそれぞれ3個ずつの、全体で12個のサンプルがあるRGBの場合と比べると、メモリーを1/2に減らすことができる。ここで4:1:1ではなく、4:2:2であればYUV2モデルになる。
【0044】
B.二進化
これは、撮影された画像から、背景と分析対象物を分離することにより、特定情報を抽出するために、デジタル画像を黒色0と白色255の二つの値だけで表現する技法である。背景と分析対象物の特徴を分けるとき、明度の閾値(Threshold)を置く。閾値以下の値を0、閾値以上の値を1にすることにより、物体を容易に識別することができる。閾値の設定は、使用者の判断によって決まる場合もあり、動的閾値を判別する技法が利用される場合もある。前記外観品位判定装置においては、数十個の米をまとめて供給して一つの画像を撮影するので、供給される米の個数によって画像の明度が変わる。
【0045】
従って、固定された閾値を使うと、二進化に誤差が発生する。よって、大津(Otsu)法を使って動的閾値を判別するようにした。大津法は、大津が1979年に提案したアルゴリズムであり、今までにも多く参照されるアルゴリズムの一つであって、動的なイメージのヒストグラムから自動的に閾値を探し出す。大津法を概略的に説明すると次の通りである。0からL-1までのグレーレベル(Grey level)を有する画像のイメージが、図2のヒストグラムのような分布を表す時、0からL-1間の任意のグレーレベルをkとすると、kを基準にして、0からk点までの左側領域と、k+1からL-1までの右側領域に分けることができる。この時k値は、二つの領域の間の分散(σ2B(k))が最大になる点として決定される。
【数1】
【数2】
【0046】
ここで、kは任意の閾値、μTはヒストグラムの平均値、ω(k)は0次累積モーメント、μ(k)は1次累積モーメント、p(i)はヒストグラムの正規確率密度関数、n(i)はグレーレベルiにおけるピクセル(Pixel:画素)数、Nは総ピクセル数をそれぞれ意味する。
【0047】
この方法は、照明及びノイズなど外部的な要因から起因したヒストグラムの変化に従ってではなく、測定しようとする米の量が変わって米粒の明るさが変化する場合に変化するヒストグラムに従って、能動的に閾値を検出することができる。
【0048】
C.接している米の境界分離
デジタル画像において、米を背景から分離しても多数個の米が互いに接している状態にあるので、個々の米粒の情報を抽出するためには、接している米を全て分離させて認識しなければならない。互いに接している米の境界を探して分離させるために、図3のように分岐点(Watershed)アルゴリズムを適用した。先ず、二進化された画像を3×3ユークリッドマスクを使って、外郭からの最短距離に距離変換(Distance Transform)した等高線状の画像を作る。
【0049】
分岐点変換(Watershed Transform)をするために、2次元の画像を3次元化した。3次元化した画像から接している米の稜線を判別して、追加の画像を作り、これを2進化された原画像と合成して、米が接している部分における境界線を付け、接している米粒を分離して、それぞれの米粒の画像を抽出した。
【0050】
次に、画像端部が擦り切れて破壊された画像、又は、小さい塵及び普通の米より大きい異物質等の、不必要な画像を消去(Edge off)した。選択された米粒の画像について、それぞれの米粒に、独立して区分するための認識番号を付与(Labeling)した。
【0051】
D.米の外観品質判定
米の外観品質の判定のための標準試料として活用するために、米を目視により、完全米、屑米、着色米、粉状質の米、ひびわれ米に分類した。これらの標準試料を、前記米外観品質判定装置を使用して画像を撮影し、外観品質判定に使う画像データを抽出した。本発明においては、米の外観品質判定のために、長軸長さ、短縮長さ、幅、面積、周囲の長さ、赤色(Red)、緑色(Green)、青色(Blue)、青緑色(Cyan)、赤紫色(Magenta)、黄色(Yellow)、黒色(Black)、色相(Hue Value)、彩度(Saturation)、濃度(Intensity)の平均及び標準偏差などの画像データを抽出して用いた。
【0052】
3.米の外観品質判定アルゴリズム
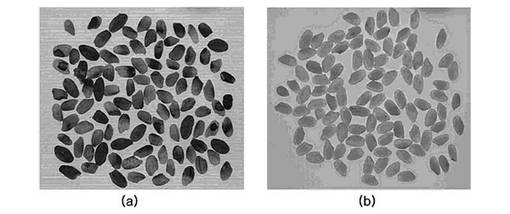
A.画像の二進化と米の明るさ変化の補正
デジタル画像から米と背景とを分離するときに、図4に示すように、明るさが互いに異なる2つの画像に対して閾値T=165を適用して二進化すると明るさが変化するので、米と背景とが明確に分離されなくなるため、明るさの変化に従って閾値を変更しなければならない。これは、供給される米の量に依存する各米の明るさの変化によって、強度ヒストグラムが変化して生じる現象である。
【0053】
これを防止するために、大津アルゴリズムを利用して、米と背景とを区分するための濃度の閾値を能動的に計算するコンピュータープログラムを作成した。図7は、大津アルゴリズムを利用して、明るさが互いに異なる2個の画像に対して計算された閾値と、二進化された結果を表わしたものである。大津アルゴリズムを利用することにより、米と背景とを区分するための濃度閾値を能動的に計算することができる。大津アルゴリズムを使わないで二進化した結果を表した図6と比べると、二進化の性能が改善されたことを確認することができる。
【0054】
B.接している米の境界分離
デジタル画像で米を背景から分離させても、多数個の米が互いに接している状態である。よって、個々の米粒の情報を抽出するためには、接している米をすべて分離させて認識する必要がある。接している米の境界を探して分離させるために、距離変換(Distance transform)及び分岐点変換(Watershed transform)アルゴリズムを適用した。図8は距離変換の過程を表わしたものである。図8(b)のような二進化画像から、図8(d)のような等高線状をした距離マップ(Distance map)を作成した。
【0055】
米粒同士が重なっている場合、その境界を分けるために図8(d)のような距離マップの画像から分岐点変換によって図9(a)のように境界線を抽出する。これを流域分割と言い、距離変換を利用した分割、傾きを利用した分割、マーカー制御を利用した分割があるが、本発明では距離変換による流域分割(valley segmentation)を用いた。このように得られた流域稜線(valley ridge)の画像を反転(Inverse)させた後、二進画像と接合(And)させれば、接している米の境界線が離れて認識される。図9は、接している米の境界線を探し出す過程を示した図である。
【0056】
流域稜線(valley ridge)を探し出す正確度は、距離マップの間隔からも多くの影響を受ける。即ち、距離マップの間隔があまり大きいと、流域稜線の検出が困難になる。距離マップの間隔があまり詰まっていると、図10(b)のように、正常な米の画像を幾つかに分離する結果をもたらす。
【0057】
ここで、それぞれの米粒を分析するために、図9(d)のように、米粒を独立に区分して名前を与えることをラベリングと言う。 このために各ピクセルが互いに離れているのか接しているのかを判断し、離れている画素には違う名前を、接しているピクセルには同じ名前を付与する。
本発明では繰り返し(recursive)成分ラベリングアルゴリズムを用いた。
【0058】
C.米の外観品位判定
ラべリング(labeling)で米に番号が付与され、それぞれの米の面積を計算するが、屑米であるか否かは、米の面積を基準に判定した。一般的に米の面積は米の画像が占めるピクセルの個数をすべて合わせたものと同じである。従って、米のピクセル数が米の面積となり、本発明では、米の画像のピクセル数が1,000以下である場合に屑米と判定した。図11は、本実施例における米外観品位判定装置で撮影した屑米の画像を示した図である。
【0059】
粉状質の米と着色米は、米の画像の色情報を比べて判定した。まず、粉状質の米はRGB色座標において、Red値>Blue値であると共に、Red値>Yellow値である場合に粉状質の米として区分した。しかしながら、完全米の一部が粉状質の米に判別される場合がある。そこで、粉状質の米の中でGreen値-Black値>6,000である場合は、完全米として区分した。一方、着色米はRed値>Blue値でありながらRed値<Yellow値であるか着色ピクセル数が30以上であれば、着色米として区分した。しかしながら、一部の粉状質の米の中でも着色米として判別される場合がある。そこで、着色米の中でYellow値-Red値が5000以上であり、(着色ピクセル数)X3<(白ピクセル数)である場合は、粉状質米として区分した。
【0060】
図12は、本発明の米外観品位判定装置で撮影した、粉状質の米と着色米の画像を示す図である。割れ米、着色米又はひび割れ米でないものは、完全米として判別した。また完全米の中で、ひびがある米をひびわれ米として判定した。
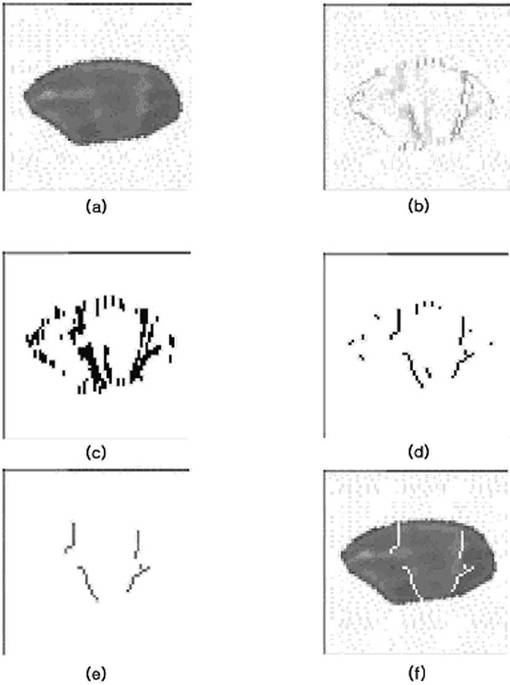
【0061】
ひびわれ米の判定にはエッジ(edge)判別法を用いた。すなわち、ひびわれ米は、米表面にひびがある部分の明るさが、他の部分の明るさと差があることを利用して識別した。このため、カメラで撮った画像からそれぞれの米粒の画像を分離して、米一粒ごとに一つの画像を作った。そして、米の長軸が水平方向に対して傾いた角度(orientation angle)を計算した後に、長軸が水平になるように米粒を回転させて配列させ、垂直エッジ判別演算子を利用して、垂直エッジ成分を抽出した。
【0062】
しかしながら、抽出された垂直エッジ成分のすべてがひびの成分であるということはないので、垂直成分を厚くするために、垂直強化フイルタリングを行った。ひびの成分を分離するために、平均−標準偏差値を使って二進化した。次に、シニング(thinning)を行って、厚いひびの成分を薄くした。純粋なひびの画像を作成するために、小さいひびを取り除いた。原画像とひびの画像を合成して、米にひびを示した。
【0063】
図13は、本発明の米外観品位判定装置で撮影した、完全米の画像を表わしたものである。この場合に、ひびを検出するために作成されたアルゴリズムによって処理する過程を、図14に表わした。
【0064】
4.搗精品位自動判定機の製作
A.搗精品位自動判定機の構造
図1及び図2に示した構成の米搗精品位自動判定機を製作した。本発明の米の搗精品位測定装置は、米を供給して画像を撮影する駆動部と、撮影された画像を分析するコンピューターで構成されている。駆動部は、回転ロール41を具備して米を一定量ずつ供給する米供給筒40と、供給された米を、CCDカメラ20の下部に移送させる半透明アクリルで作った回転円板(Φ500mm)50で構成された。前記回転円板50の上に試料台30が装着され、上部照明21として米を照明する12W容量の白熱燈1個、及びCCDカメラ20(LGハニウェル、GC-450NA-G)が装着された。
【0065】
前記CCDカメラ20には、前面に焦点距離6mm、明るさF1.2のレンズが取り付けられており、焦点と光量を調節することができる。前記CCDカメラ20は、上下方向に高さを調節できるように製作した。また、画像撮影が終わった米を排出するための排出分離板51と収集筒52を設置し、前記回転円板50の下部にも、下部照明22として4W容量の照明用蛍光燈2個を設けた。前記米供給筒40の回転ロール41及び前記回転円板50の速度を調節するために、速度調節機60を取り付けた。
【0066】
試作機に使われたコンピューター10はペンティアム(登録商標)IV(2,0G、DDR2-RAM512M)であり、O/SとしてはWindows(登録商標) XPを使った。試作機の作動方法は、米供給筒40に測定する米を入れた後、回転円板(50)の作動スィッチを押して、一番前に供給された米がCCDカメラ20の下部に供給された後、回転円板50の作動を止める。そして、コンピューターモニターで明るさ測定モードを押して明るさが基準範囲内にあるかを確認する。その後、開始ボタンを押すと、自動で米が供給されながら分析される。測定される間、米の画像と分析結果がリアルタイムでモニターに表示される。分析が終わると、結果値をモニターに表示しながら、テキストファイルでデータがコンピューターの保存装置に保存される。コンピューター内に内蔵したフレームグラバー11は、Windows(登録商標) 2000、Windows(登録商標) XPのOSで使用可能になるように、WDM(Windows(登録商標) Driver Model)方式のBT878チップ(chip)を使って自作した。画像処理プログラムは、MFC(Microsoft Foundation Class Library)方式でビジュアル(Visual)C++言語を使って作成した。
【0067】
B.米外観品位判定性能
多様な形態と色の米を任意に調合し、供給された米を試作機を使って分析した結果、接している米等を、ソフトウェア的に分離させて個別に認識する精度は98%であった。この精度は、Visenら(2001)が楕円合わせ法(ellipse fitting method)を使って、小麦・麦・ライ麦・オート麦に関して、接触している穀粒などを、個々の穀粒に認識した時の精度が平均98.6%であったという研究結果と比べて、はるかに改善されたと判断された。即ち、Visenらの研究結果は、接触点での曲率変化が明確でなかった場合、又は、互いに接触した穀粒の画像から個々の穀粒を分離する時に、境界面が不規則で接触面が明確でなかった場合には、識別精度が下がり、また、これらの方法は、形状が似ている穀粒に対しては適用させることができるが、形状が異なる異種穀粒又は割れた穀粒などが混入すると、又は、穀粒が接している形が不規則的で複雑になると、個々の穀粒を分離・認識する精度が低下したりしたからである。
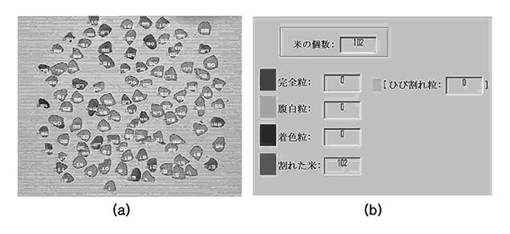
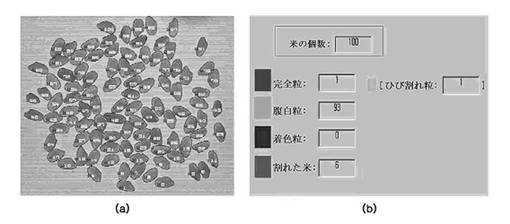
【0068】
試作機は屑米を100%判定することができた。図15に割れた米を分析した結果を表わした。図16に粉状質の米94個と屑米6個を分析した結果を表わした。粉状質の米の中で、1個が完全米と判別されたことから、判別正確度は98.9%であった。図17は着色米95個と屑米5個を分析した結果を表わし、着色米の中で1個が粉状質の米と判別されたことから、判別正確度は98.9%であった。図18は完全米93個と割れた米12個を分析した結果を表わす。完全米の中で3個が粉状質の米と判別されたことから、判別の正確度は96.8%であった。また、完全粒の目視判別によると、ひび割れ米の個数は73個であったのに対し、試作機による判別結果は68個であり、判別正確度は93.2%であった。
【0069】
また、100粒の米粒を判定するのに所要された時間は約15秒であった。これは、既存の判定方法による時間に比べて非常に短く、優秀である。本発明の判定方法を使用することにより、既存の製品より構成が簡単であり、製作費用も安価な装置とすることができる。
【産業上の利用可能性】
【0070】
本発明の白米及び玄米の外観品位測定方法によれば、目視で判別する時の労力と時間を節減することができるだけでなく、機械的基準によって判別するので、判別の客観性を確保することができるという効果がある。
【0071】
また、本発明の白米及び玄米の外観品位測定方法によれば、白米又は玄米を1粒ずつ供給して判別する既存のシステムとは異なり、数十個の白米又は玄米を連続的に供給してそれぞれの白米又は玄米の粒の品位が判別できる上、白米又は玄米を1粒ずつ供給する装置が不必要になるので、製品価格を画期的に低減することができると供に、数十個の米粒又は玄米粒を供給しながらリアルタイムで判別するので、判別時間も短縮することができるという効果がある。
【0072】
以上、本発明の好ましい実施例を説明したが、本発明は、玄米は勿論、小麦や麦、オート麦及びライ麦等、その他の穀物の外観品位判定にも適用することができる。そして、本発明の範囲はこのような特定の実施例によって限定されず、該当分野で通常の知識を有する者であれば、本発明の特許請求範囲内に記載された範疇で、適切に変更することが可能である。
【符号の説明】
【0073】
10:コンピューター
11:フレームグラバー
20:CCDカメラ
21:上部照明
22:下部照明
30:試料台
40:供給筒
41:回転ロール
50:回転円板
51:排出分離板
52:収集筒
60:スピードコントロール
【特許請求の範囲】
【請求項1】
試料台の上に置かれた白米又は玄米をカメラで撮影する工程と;
該カメラによって撮影された白米又は玄米の原画像をフレームグラバーによってRGB又はYUVモデルに該当するデータ形態で保存する工程と;
保存された画像を二進化する工程と;
二進化された画像を最短距離に距離変換(Distance Transform)して等高線形の2次元画像を作る工程と;
前記2次元画像を3次元化して、分岐点変換(Watershed Transform)を通じて境界線を抽出する工程と;
前記境界線を基準にして接している白米又は玄米の画像を分離し、それぞれの白米又は玄米の画像に対してラベリングをする工程と;
前記工程でラベリングされた各白米又は玄米の画像を分析して完全米、粉状質の米、屑米、ひびわれ米、着色米又は完全玄米、粉状質の玄米、屑米、ひびわれ玄米、着色玄米の中の一つ以上の割合及び個数を判定する工程とからなることを特徴とする白米及び玄米の外観品位測定方法。
【請求項2】
前記保存された画像を二進化する工程が、白米又は玄米と背景とを区分するための濃度の閾値を能動的に計算することができるように、大津(Otsu)アルゴリズムを用いる、請求項1に記載された白米又は玄米の外観品位測定方法。
【請求項1】
試料台の上に置かれた白米又は玄米をカメラで撮影する工程と;
該カメラによって撮影された白米又は玄米の原画像をフレームグラバーによってRGB又はYUVモデルに該当するデータ形態で保存する工程と;
保存された画像を二進化する工程と;
二進化された画像を最短距離に距離変換(Distance Transform)して等高線形の2次元画像を作る工程と;
前記2次元画像を3次元化して、分岐点変換(Watershed Transform)を通じて境界線を抽出する工程と;
前記境界線を基準にして接している白米又は玄米の画像を分離し、それぞれの白米又は玄米の画像に対してラベリングをする工程と;
前記工程でラベリングされた各白米又は玄米の画像を分析して完全米、粉状質の米、屑米、ひびわれ米、着色米又は完全玄米、粉状質の玄米、屑米、ひびわれ玄米、着色玄米の中の一つ以上の割合及び個数を判定する工程とからなることを特徴とする白米及び玄米の外観品位測定方法。
【請求項2】
前記保存された画像を二進化する工程が、白米又は玄米と背景とを区分するための濃度の閾値を能動的に計算することができるように、大津(Otsu)アルゴリズムを用いる、請求項1に記載された白米又は玄米の外観品位測定方法。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】

【図14】
【図15】
【図16】
【図17】
【図18】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【公開番号】特開2013−29520(P2013−29520A)
【公開日】平成25年2月7日(2013.2.7)
【国際特許分類】
【出願番号】特願2012−216963(P2012−216963)
【出願日】平成24年9月28日(2012.9.28)
【分割の表示】特願2010−527882(P2010−527882)の分割
【原出願日】平成20年9月30日(2008.9.30)
【出願人】(599151282)大韓民国農村振興庁 (16)
【氏名又は名称原語表記】REPUBLIC OF KOREA(MANAGEMENT RURAL DEVELOPMENT ADMINISTRATION)
【住所又は居所原語表記】250 Seodundong,Kwonseongu,Suwon,Gyeongido 441−707,Republic of Korea
【Fターム(参考)】
【公開日】平成25年2月7日(2013.2.7)
【国際特許分類】
【出願日】平成24年9月28日(2012.9.28)
【分割の表示】特願2010−527882(P2010−527882)の分割
【原出願日】平成20年9月30日(2008.9.30)
【出願人】(599151282)大韓民国農村振興庁 (16)
【氏名又は名称原語表記】REPUBLIC OF KOREA(MANAGEMENT RURAL DEVELOPMENT ADMINISTRATION)
【住所又は居所原語表記】250 Seodundong,Kwonseongu,Suwon,Gyeongido 441−707,Republic of Korea
【Fターム(参考)】
[ Back to top ]