
監視カメラシステム
【課題】ライン露光方式のCMOSセンサ及び回転台を備えた監視カメラシステムにおいて、カメラの回転動作による水平方向の映像歪みを補正する監視カメラシステムを得ることを目的とする。
【解決手段】監視対象を撮像する撮像部、撮像部の撮像出力を映像信号処理する信号処理部、信号処理部の映像出力を保持する記憶部及び信号処理部による映像信号処理を制御する制御部を有する監視カメラと、監視カメラを回転自在に支持し、制御部によって回転が制御される回転台とを備え、制御部は、回転台の回転速度に応じた映像出力の歪みを補正するための第1の補正係数を保持するデータテーブルを有し、信号処理部は、制御部によりデータテーブルから読み出された第1の補正係数に基づいて、記憶部に保持された映像の切り出しを補正して表示映像として出力する
【解決手段】監視対象を撮像する撮像部、撮像部の撮像出力を映像信号処理する信号処理部、信号処理部の映像出力を保持する記憶部及び信号処理部による映像信号処理を制御する制御部を有する監視カメラと、監視カメラを回転自在に支持し、制御部によって回転が制御される回転台とを備え、制御部は、回転台の回転速度に応じた映像出力の歪みを補正するための第1の補正係数を保持するデータテーブルを有し、信号処理部は、制御部によりデータテーブルから読み出された第1の補正係数に基づいて、記憶部に保持された映像の切り出しを補正して表示映像として出力する
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、映像歪みを補正する機能を備えた監視カメラシステムに関するものである。
【背景技術】
【0002】
従来から撮像した映像の歪みを補正する機能を持つ監視カメラシステムの技術が開発されており、例えば特許文献1には、撮像素子の前に配置されるレンズ歪曲によって発生する映像歪みを補正するものが開示されている。
【0003】
【特許文献1】特開2007−228531号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
しかしながら、従来の監視カメラシステムにおいてライン露光のCMOSセンサを有するカメラは、各画素の蓄積期間が撮像信号の出力されるタイミングに同期するため、撮像部を搭載した回転台が動いた場合、回転速度に応じて映像が歪んでしまうという課題があった。
また、近年、監視カメラの回転台回転速度の高速化に伴い、ライン露光方式のCMOSセンサを使用したカメラにおいて、回転時の映像乱れが大きくなっているという課題があった。
【0005】
この発明は上記のような課題を解消するためになされたもので、ライン露光方式のCMOSセンサ及び回転台を備えた監視カメラシステムにおいて、カメラの回転動作による水平方向の映像歪みを補正する監視カメラシステムを得ることを目的とする。
【課題を解決するための手段】
【0006】
この発明に係る監視カメラシステムは、監視対象を撮像する撮像部、撮像部の撮像出力を映像信号処理する信号処理部、信号処理部の映像出力を保持する記憶部及び信号処理部による映像信号処理を制御する制御部を有する監視カメラと、監視カメラを回転自在に支持し、制御部によって回転が制御される回転台とを備え、制御部は、回転台の回転速度に応じた映像出力の歪みを補正するための第1の補正係数を保持するデータテーブルを有し、信号処理部は、制御部によりデータテーブルから読み出された第1の補正係数に基づいて、記憶部に保持された映像の切り出しを補正して表示映像として出力するものである。
【発明の効果】
【0007】
この発明によれば、回転台の回転速度に応じた補正係数に基づいて撮像信号を切り出して映像歪みを補正することができるように構成したので、被写体と等価な映像信号を出力することができ、映像の不自然さを解消することができる。
【発明を実施するための最良の形態】
【0008】
以下、この発明の実施の形態を、図面を参照しながら詳細に説明する。
実施の形態1.
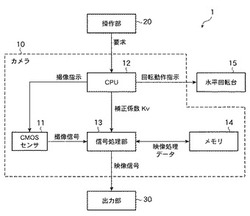
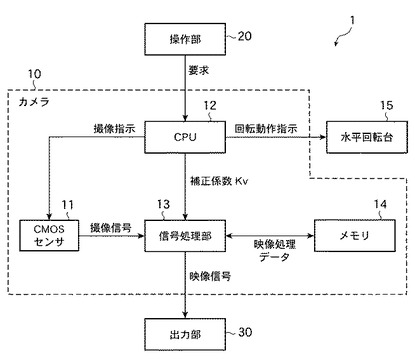
図1は、本実施の形態1の監視カメラシステム1の構成を示すブロック図であり、監視カメラシステム1は、カメラ装置、操作部20、出力部30から構成されている。
カメラ装置は、撮像して映像信号を出力するカメラ部(監視カメラ)10とこのカメラ部10を回転可能に支持する水平回転台(回転台)15とに大きく分けられ、カメラ部10はCMOSセンサ(撮像部)11、CPU(制御部)12、信号処理部13、メモリ(記憶部)14とで構成される。
CMOSセンサ11が受光素子からの信号電荷をCMOS(Complementary Metal Oxide Semiconductor)によりライン露光方式で撮像信号として出力すると、信号処理部13が撮像信号に対して所定の演算処理を行い映像信号に変換して出力する。この際、信号処理部13は、メモリ14にCMOSセンサ11からの撮像信号を一時保存させて演算処理を行う。
水平回転台15は、例えば天井や壁などに固定され、固定される面に水平な方向へ回転可能にカメラ部10を支持している。
CPU12は、これらカメラ装置全体の制御を行っている。
操作部20は、ユーザによるキーボード入力やプログラム等によりカメラ装置の操作要求を行うものであり、出力部30は、カメラ装置からの映像信号を映像として表示するモニタや映像の解析を行うコンピュータなどである。
【0009】
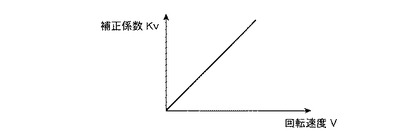
ここで、CPU12には水平回転台15の回転速度Vに応じた映像の歪みを補正する補正係数Kv(第1補正係数)が予め記憶されており、水平回転台15の回転速度Vと撮像信号の補正係数Kvとの関係は回転速度Vが速くなると補正係数Kvの値も大きくなる比例関係がデータテーブルとして記憶されている。特にCMOSセンサ11が常に一定のシャッタスピードで撮像をする場合、回転速度Vと補正係数Kvとの関係は、図2のように直線性の比例関係を示す。
【0010】
次に監視カメラシステム1の処理について説明する。
CPU12は、操作部20から撮像の開始を要求されると、CMOSセンサ11に撮像を開始するように指示する。撮像を開始する指示に従い、CMOSセンサ11が図示しないレンズを介して入ってくる光を電気信号に変換して撮像信号を出力する。
【0011】
また、CPU12は、操作部20からカメラ部10を回転させるよう操作が要求されると、要求された速度Vで回転するよう水平回転台15に指示するとともに水平回転台15に指示した回転速度Vに対応する補正係数Kvを信号処理部13に通知する。
【0012】
CPU12からの指示に従い、水平回転台15が速度Vで回転してカメラ部10の撮像方向を移動させるとともに、CMOSセンサ11が撮像信号を出力する。
【0013】
信号処理部13は、CMOSセンサ11から撮像信号が入力されると、メモリ14に撮像信号を記憶させて、この撮像信号と補正係数Kvとに基づいて撮像信号を演算処理により変換した映像信号を出力部30に出力する。
【0014】
ここで、信号処理部13及びメモリ14が行う演算処理について図3〜5を用いて説明する。
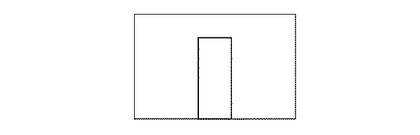
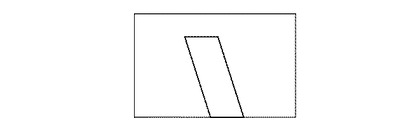
図3は撮像被写体を示す図であり、図4はカメラ部10が回転している状態でCMOSセンサ11が出力する撮像信号を表す図であり、図5は1フレーム分の撮像信号の補完処理を説明する図である。
【0015】
例えば、図3に示すような長方形の物体を撮像対象した場合を考える。
CMOSセンサ11は、ライン露光の原理によって図示しない各受光素子の信号電荷の蓄積期間がCMOSセンサ11の撮像信号を出力するタイミングに同期されるため、撮像した映像は水平回転台15の回転速度Vが速ければ速いほど映像の流れ度合いが大きい。
撮像する際に水平回転台15が画面右方向に回転すると、CMOSセンサ11が出力する撮像信号に基づく映像は、図4に示すように上部が左方向に流れた平行四辺形の形状になる。
【0016】
信号処理部13及びメモリ14は、入力された撮像信号と補正係数Kvとに基づいて補完処理を行う。補完処理とは、演算処理により撮像信号の切り出し及び拡大を行い所定のフォーマットを持つ映像信号に変換して出力することである。
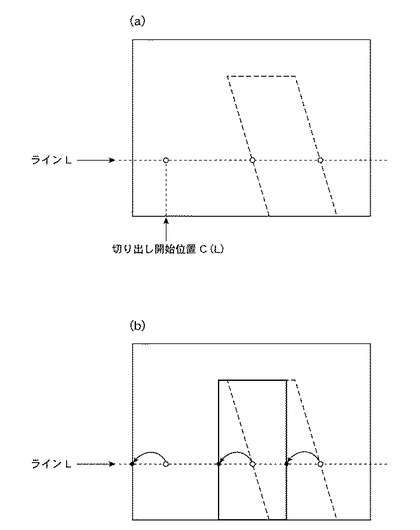
撮像信号からの切り出しは、以下の(1)式を用いて行われ、補正係数Kvにライン段数Lを変数として乗じて算出したC(L)を切り出し開始位置(左端画素からの数え位置)として撮像信号を切り出す。
C(L)=Kv×L ・・・(1)
【0017】
図5(a)に示すように1フレーム分の撮像信号のラインLにおいて、(1)式で求めた位置C(L)から信号の切り出しを開始すると、図5(b)に示すように撮像信号の流れが補完され、被写体と等価な映像信号が出力される。
【0018】
また、撮像信号の拡大は、例えば所定の画像サイズがSXVGAサイズ(1280×960)で、撮像信号の切り出しはVGAサイズ(640×480)で行われる場合、切り出した撮像信号の画素を2倍に拡大しSXVGAサイズにする処理である。
このようにして、信号処理部13は、所定のフォーマットを持つ映像信号に変換して出力する。
【0019】
以上のように、この実施の形態1によれば、信号処理部は水平回転台15の回転速度Vに応じた補正係数Kvに基づいて撮像信号を補正するようにしたので、カメラ部10が動かされて撮像映像の変形があったとしても、カメラ部10の静止時と同様に被写体と等価な映像信号を出力することができ、映像の不自然さを解消することができる。
【0020】
なお、本実施の形態において、CPU12には水平回転台15の回転速度Vに応じた補正係数Kvが予め記憶されていると述べたが、補正係数Kvをプログラム等で随時求めるものや操作部20から補正係数Kvを調整できるような構成であっても同様の効果を得ることができる。
【0021】
実施の形態2.
実施の形態1の監視カメラシステム1は、水平回転台15の回転速度Vに応じた映像歪みを補正する補正係数Kvに基づいて撮像信号を補正したが、さらにカメラ装置にズーム倍率を可変にするズームレンズ46を備え、ズーム倍率Zに応じた映像の歪みを補正する補正係数Kz(第2補正係数)を用いて撮像信号を補正するようにしてもよい。
【0022】
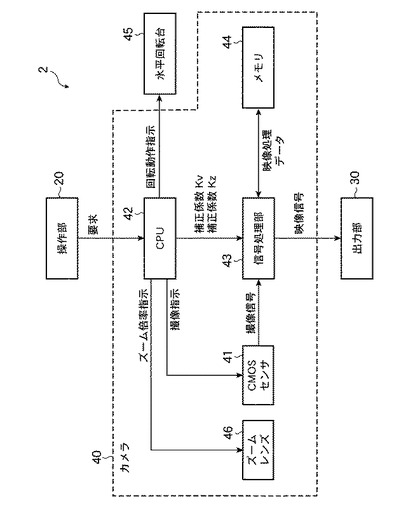
図5は、実施の形態2の監視カメラシステム2の構成を示すブロック図である。
監視カメラシステム2は、図示しない被写体とCMOSセンサ41との間にCPU42で制御されるズームレンズ46を備えた構成であり、他の構成は実施の形態1で示した監視カメラシステム1の構成と同様であり他の構成の説明は省略する。
ズームレンズ46は、CPU42からの指示に従いズーム倍率Zを変更する図示しないモータ及びレンズ等で構成される。
【0023】
CPU42は、操作部20からズームレンズ46のズーム倍率Zを変更するよう要求されると、要求されたズーム倍率Zにするようカメラ部40のズームレンズ46に指示するとともにズームレンズ46に指示したズーム倍率(焦点距離)Zに対応する補正係数Kzを信号処理部43に通知する。
【0024】
このとき、水平回転台45の回転速度Vだけではなく、ズーム倍率ZによってもCMOSセンサ41による撮像の流れ度合いが変化する。言い換えると、CMOSセンサ41が撮像する映像の被写体の移動速度が変化する。
具体的にはズームレンズ46のズーム倍率Zが小さい(焦点距離が短い)場合は、水平回転台45の回転速度Vに対して出力映像画面内の被写体速度が小さくなるが、ズームレンズ46のズーム倍率Zが大きい(焦点距離が長い)場合は水平回転台45の回転速度Vに対して出力映像画面内の被写体速度が大きくなる。
そこで、水平回転台45の回転速度Vに応じた補正係数Kvとズーム倍率Zに応じた補正係数Kzとを用いて補完処理を行う。
【0025】
ここで、補正係数Kzについて説明する。
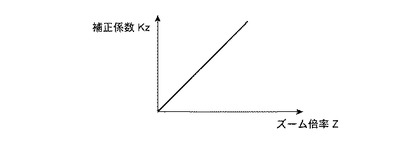
図7はズームレンズ46のズーム倍率Zと補正係数Kzとの関係を示す図である。
CPU42にはズームレンズ46のズーム倍率Zに応じた補正係数Kzが予め記憶されており、ズームレンズ46のズーム倍率Zと撮像信号の補正係数Kzとの関係は図7のようにズーム倍率Zが大きくなると補正係数Kzの値も大きくなる比例関係がデータテーブルとして記憶されている。なお、補正係数Kzは、レンズ仕様及び信号処理方式により、補完処理が適切にされるように設定されている。
【0026】
信号処理部43は、入力された撮像信号と補正係数Kvと補正係数Kzとにより実施の形態1と同様に補完処理を行う。
撮像信号からの切り出しは、以下の(2)式を用いて行われ、補正係数Kvと補正係数Kzとライン段数Lとを乗じて算出したC(L)を切り出し開始位置(左端画素からの数え位置)として撮像信号を切り出す。
C(L)=Kz×Kv×L ・・・(2)
実施の形態1と同様に、各ラインLにおいてC(L)の画素位置から指定の撮像信号を切り出すことで、回転動作による撮像信号の歪みがズームレンズによるズーム倍率を考慮して補完処理され、静止時と同様に歪みの無い映像が出力される。
【0027】
以上のように、実施の形態2によれば、水平回転台45の回転速度Vに応じた補正係数Kvに加え、ズームレンズ46のズーム倍率Zに応じた補正係数Kzを用いて、撮像信号を補完処理するようにしたので、どのようなズーム倍率Zの場合にカメラ部40が動かされて撮像信号の変形があったとしても、CMOSセンサ41の静止時と同様に被写体と等価な映像信号を出力することができ、映像の不自然さを解消することができる。
【0028】
なお、本実施の形態において、信号処理部43はズームレンズ46のズーム倍率Zに応じた補正係数Kzを用いて補完処理を行ったが、さらに単位画素を拡大することでズームを実現して映像信号を出力する機能(以下電子ズームと述べる)を備えた監視カメラシステムにおいても電子ズーム倍率Z´に応じた映像歪みを補正する補正係数Kz´(第3補正係数)を用いることで同様の補完処理を行うことができる。
【0029】
さらに、本実施の形態では、信号処理部13,43が行う演算処理は撮像信号の切り出しを行い撮像映像の流れを補完する補完処理であると述べたが、信号処理部13,43で行う演算処理は、撮像素子で得たアナログ信号をデジタル化する際に発生したノイズやモアレなどを除去するデジタル処理等、補完処理とともにデジタル技術を使用して信号の処理を行うものであってもよい。
【図面の簡単な説明】
【0030】
【図1】実施の形態1による監視カメラシステムの構成を示すブロック図である。
【図2】水平回転台の回転速度Vと補正係数Kvの関係を表す図である。
【図3】水平回転台静止している場合の撮像を表す図である。
【図4】水平回転台が画面右方向へ回転した場合の撮像を表す図である。
【図5】撮像信号の補完処理を説明する図である。
【図6】実施の形態2による監視カメラシステムの構成を示すブロック図である。
【図7】ズームレンズのズーム倍率Zと補正係数Kzの関係を表す図である。
【符号の説明】
【0031】
1,2 監視カメラシステム、10,40 カメラ部(監視カメラ)、11,41 CMOSセンサ(撮像部)、12,42 CPU(制御部)、13,43 信号処理部、14,44 メモリ(記憶部)、15,45 水平回転台(回転台)、20 操作部、30 出力部、46 ズームレンズ。
【技術分野】
【0001】
この発明は、映像歪みを補正する機能を備えた監視カメラシステムに関するものである。
【背景技術】
【0002】
従来から撮像した映像の歪みを補正する機能を持つ監視カメラシステムの技術が開発されており、例えば特許文献1には、撮像素子の前に配置されるレンズ歪曲によって発生する映像歪みを補正するものが開示されている。
【0003】
【特許文献1】特開2007−228531号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
しかしながら、従来の監視カメラシステムにおいてライン露光のCMOSセンサを有するカメラは、各画素の蓄積期間が撮像信号の出力されるタイミングに同期するため、撮像部を搭載した回転台が動いた場合、回転速度に応じて映像が歪んでしまうという課題があった。
また、近年、監視カメラの回転台回転速度の高速化に伴い、ライン露光方式のCMOSセンサを使用したカメラにおいて、回転時の映像乱れが大きくなっているという課題があった。
【0005】
この発明は上記のような課題を解消するためになされたもので、ライン露光方式のCMOSセンサ及び回転台を備えた監視カメラシステムにおいて、カメラの回転動作による水平方向の映像歪みを補正する監視カメラシステムを得ることを目的とする。
【課題を解決するための手段】
【0006】
この発明に係る監視カメラシステムは、監視対象を撮像する撮像部、撮像部の撮像出力を映像信号処理する信号処理部、信号処理部の映像出力を保持する記憶部及び信号処理部による映像信号処理を制御する制御部を有する監視カメラと、監視カメラを回転自在に支持し、制御部によって回転が制御される回転台とを備え、制御部は、回転台の回転速度に応じた映像出力の歪みを補正するための第1の補正係数を保持するデータテーブルを有し、信号処理部は、制御部によりデータテーブルから読み出された第1の補正係数に基づいて、記憶部に保持された映像の切り出しを補正して表示映像として出力するものである。
【発明の効果】
【0007】
この発明によれば、回転台の回転速度に応じた補正係数に基づいて撮像信号を切り出して映像歪みを補正することができるように構成したので、被写体と等価な映像信号を出力することができ、映像の不自然さを解消することができる。
【発明を実施するための最良の形態】
【0008】
以下、この発明の実施の形態を、図面を参照しながら詳細に説明する。
実施の形態1.
図1は、本実施の形態1の監視カメラシステム1の構成を示すブロック図であり、監視カメラシステム1は、カメラ装置、操作部20、出力部30から構成されている。
カメラ装置は、撮像して映像信号を出力するカメラ部(監視カメラ)10とこのカメラ部10を回転可能に支持する水平回転台(回転台)15とに大きく分けられ、カメラ部10はCMOSセンサ(撮像部)11、CPU(制御部)12、信号処理部13、メモリ(記憶部)14とで構成される。
CMOSセンサ11が受光素子からの信号電荷をCMOS(Complementary Metal Oxide Semiconductor)によりライン露光方式で撮像信号として出力すると、信号処理部13が撮像信号に対して所定の演算処理を行い映像信号に変換して出力する。この際、信号処理部13は、メモリ14にCMOSセンサ11からの撮像信号を一時保存させて演算処理を行う。
水平回転台15は、例えば天井や壁などに固定され、固定される面に水平な方向へ回転可能にカメラ部10を支持している。
CPU12は、これらカメラ装置全体の制御を行っている。
操作部20は、ユーザによるキーボード入力やプログラム等によりカメラ装置の操作要求を行うものであり、出力部30は、カメラ装置からの映像信号を映像として表示するモニタや映像の解析を行うコンピュータなどである。
【0009】
ここで、CPU12には水平回転台15の回転速度Vに応じた映像の歪みを補正する補正係数Kv(第1補正係数)が予め記憶されており、水平回転台15の回転速度Vと撮像信号の補正係数Kvとの関係は回転速度Vが速くなると補正係数Kvの値も大きくなる比例関係がデータテーブルとして記憶されている。特にCMOSセンサ11が常に一定のシャッタスピードで撮像をする場合、回転速度Vと補正係数Kvとの関係は、図2のように直線性の比例関係を示す。
【0010】
次に監視カメラシステム1の処理について説明する。
CPU12は、操作部20から撮像の開始を要求されると、CMOSセンサ11に撮像を開始するように指示する。撮像を開始する指示に従い、CMOSセンサ11が図示しないレンズを介して入ってくる光を電気信号に変換して撮像信号を出力する。
【0011】
また、CPU12は、操作部20からカメラ部10を回転させるよう操作が要求されると、要求された速度Vで回転するよう水平回転台15に指示するとともに水平回転台15に指示した回転速度Vに対応する補正係数Kvを信号処理部13に通知する。
【0012】
CPU12からの指示に従い、水平回転台15が速度Vで回転してカメラ部10の撮像方向を移動させるとともに、CMOSセンサ11が撮像信号を出力する。
【0013】
信号処理部13は、CMOSセンサ11から撮像信号が入力されると、メモリ14に撮像信号を記憶させて、この撮像信号と補正係数Kvとに基づいて撮像信号を演算処理により変換した映像信号を出力部30に出力する。
【0014】
ここで、信号処理部13及びメモリ14が行う演算処理について図3〜5を用いて説明する。
図3は撮像被写体を示す図であり、図4はカメラ部10が回転している状態でCMOSセンサ11が出力する撮像信号を表す図であり、図5は1フレーム分の撮像信号の補完処理を説明する図である。
【0015】
例えば、図3に示すような長方形の物体を撮像対象した場合を考える。
CMOSセンサ11は、ライン露光の原理によって図示しない各受光素子の信号電荷の蓄積期間がCMOSセンサ11の撮像信号を出力するタイミングに同期されるため、撮像した映像は水平回転台15の回転速度Vが速ければ速いほど映像の流れ度合いが大きい。
撮像する際に水平回転台15が画面右方向に回転すると、CMOSセンサ11が出力する撮像信号に基づく映像は、図4に示すように上部が左方向に流れた平行四辺形の形状になる。
【0016】
信号処理部13及びメモリ14は、入力された撮像信号と補正係数Kvとに基づいて補完処理を行う。補完処理とは、演算処理により撮像信号の切り出し及び拡大を行い所定のフォーマットを持つ映像信号に変換して出力することである。
撮像信号からの切り出しは、以下の(1)式を用いて行われ、補正係数Kvにライン段数Lを変数として乗じて算出したC(L)を切り出し開始位置(左端画素からの数え位置)として撮像信号を切り出す。
C(L)=Kv×L ・・・(1)
【0017】
図5(a)に示すように1フレーム分の撮像信号のラインLにおいて、(1)式で求めた位置C(L)から信号の切り出しを開始すると、図5(b)に示すように撮像信号の流れが補完され、被写体と等価な映像信号が出力される。
【0018】
また、撮像信号の拡大は、例えば所定の画像サイズがSXVGAサイズ(1280×960)で、撮像信号の切り出しはVGAサイズ(640×480)で行われる場合、切り出した撮像信号の画素を2倍に拡大しSXVGAサイズにする処理である。
このようにして、信号処理部13は、所定のフォーマットを持つ映像信号に変換して出力する。
【0019】
以上のように、この実施の形態1によれば、信号処理部は水平回転台15の回転速度Vに応じた補正係数Kvに基づいて撮像信号を補正するようにしたので、カメラ部10が動かされて撮像映像の変形があったとしても、カメラ部10の静止時と同様に被写体と等価な映像信号を出力することができ、映像の不自然さを解消することができる。
【0020】
なお、本実施の形態において、CPU12には水平回転台15の回転速度Vに応じた補正係数Kvが予め記憶されていると述べたが、補正係数Kvをプログラム等で随時求めるものや操作部20から補正係数Kvを調整できるような構成であっても同様の効果を得ることができる。
【0021】
実施の形態2.
実施の形態1の監視カメラシステム1は、水平回転台15の回転速度Vに応じた映像歪みを補正する補正係数Kvに基づいて撮像信号を補正したが、さらにカメラ装置にズーム倍率を可変にするズームレンズ46を備え、ズーム倍率Zに応じた映像の歪みを補正する補正係数Kz(第2補正係数)を用いて撮像信号を補正するようにしてもよい。
【0022】
図5は、実施の形態2の監視カメラシステム2の構成を示すブロック図である。
監視カメラシステム2は、図示しない被写体とCMOSセンサ41との間にCPU42で制御されるズームレンズ46を備えた構成であり、他の構成は実施の形態1で示した監視カメラシステム1の構成と同様であり他の構成の説明は省略する。
ズームレンズ46は、CPU42からの指示に従いズーム倍率Zを変更する図示しないモータ及びレンズ等で構成される。
【0023】
CPU42は、操作部20からズームレンズ46のズーム倍率Zを変更するよう要求されると、要求されたズーム倍率Zにするようカメラ部40のズームレンズ46に指示するとともにズームレンズ46に指示したズーム倍率(焦点距離)Zに対応する補正係数Kzを信号処理部43に通知する。
【0024】
このとき、水平回転台45の回転速度Vだけではなく、ズーム倍率ZによってもCMOSセンサ41による撮像の流れ度合いが変化する。言い換えると、CMOSセンサ41が撮像する映像の被写体の移動速度が変化する。
具体的にはズームレンズ46のズーム倍率Zが小さい(焦点距離が短い)場合は、水平回転台45の回転速度Vに対して出力映像画面内の被写体速度が小さくなるが、ズームレンズ46のズーム倍率Zが大きい(焦点距離が長い)場合は水平回転台45の回転速度Vに対して出力映像画面内の被写体速度が大きくなる。
そこで、水平回転台45の回転速度Vに応じた補正係数Kvとズーム倍率Zに応じた補正係数Kzとを用いて補完処理を行う。
【0025】
ここで、補正係数Kzについて説明する。
図7はズームレンズ46のズーム倍率Zと補正係数Kzとの関係を示す図である。
CPU42にはズームレンズ46のズーム倍率Zに応じた補正係数Kzが予め記憶されており、ズームレンズ46のズーム倍率Zと撮像信号の補正係数Kzとの関係は図7のようにズーム倍率Zが大きくなると補正係数Kzの値も大きくなる比例関係がデータテーブルとして記憶されている。なお、補正係数Kzは、レンズ仕様及び信号処理方式により、補完処理が適切にされるように設定されている。
【0026】
信号処理部43は、入力された撮像信号と補正係数Kvと補正係数Kzとにより実施の形態1と同様に補完処理を行う。
撮像信号からの切り出しは、以下の(2)式を用いて行われ、補正係数Kvと補正係数Kzとライン段数Lとを乗じて算出したC(L)を切り出し開始位置(左端画素からの数え位置)として撮像信号を切り出す。
C(L)=Kz×Kv×L ・・・(2)
実施の形態1と同様に、各ラインLにおいてC(L)の画素位置から指定の撮像信号を切り出すことで、回転動作による撮像信号の歪みがズームレンズによるズーム倍率を考慮して補完処理され、静止時と同様に歪みの無い映像が出力される。
【0027】
以上のように、実施の形態2によれば、水平回転台45の回転速度Vに応じた補正係数Kvに加え、ズームレンズ46のズーム倍率Zに応じた補正係数Kzを用いて、撮像信号を補完処理するようにしたので、どのようなズーム倍率Zの場合にカメラ部40が動かされて撮像信号の変形があったとしても、CMOSセンサ41の静止時と同様に被写体と等価な映像信号を出力することができ、映像の不自然さを解消することができる。
【0028】
なお、本実施の形態において、信号処理部43はズームレンズ46のズーム倍率Zに応じた補正係数Kzを用いて補完処理を行ったが、さらに単位画素を拡大することでズームを実現して映像信号を出力する機能(以下電子ズームと述べる)を備えた監視カメラシステムにおいても電子ズーム倍率Z´に応じた映像歪みを補正する補正係数Kz´(第3補正係数)を用いることで同様の補完処理を行うことができる。
【0029】
さらに、本実施の形態では、信号処理部13,43が行う演算処理は撮像信号の切り出しを行い撮像映像の流れを補完する補完処理であると述べたが、信号処理部13,43で行う演算処理は、撮像素子で得たアナログ信号をデジタル化する際に発生したノイズやモアレなどを除去するデジタル処理等、補完処理とともにデジタル技術を使用して信号の処理を行うものであってもよい。
【図面の簡単な説明】
【0030】
【図1】実施の形態1による監視カメラシステムの構成を示すブロック図である。
【図2】水平回転台の回転速度Vと補正係数Kvの関係を表す図である。
【図3】水平回転台静止している場合の撮像を表す図である。
【図4】水平回転台が画面右方向へ回転した場合の撮像を表す図である。
【図5】撮像信号の補完処理を説明する図である。
【図6】実施の形態2による監視カメラシステムの構成を示すブロック図である。
【図7】ズームレンズのズーム倍率Zと補正係数Kzの関係を表す図である。
【符号の説明】
【0031】
1,2 監視カメラシステム、10,40 カメラ部(監視カメラ)、11,41 CMOSセンサ(撮像部)、12,42 CPU(制御部)、13,43 信号処理部、14,44 メモリ(記憶部)、15,45 水平回転台(回転台)、20 操作部、30 出力部、46 ズームレンズ。
【特許請求の範囲】
【請求項1】
監視対象を撮像する撮像部、上記撮像部の撮像出力を映像信号処理する信号処理部、上記信号処理部の映像出力を保持する記憶部及び上記信号処理部による映像信号処理を制御する制御部を有する監視カメラと、
上記監視カメラを回転自在に支持し、上記制御部によって回転が制御される回転台とを備え、
上記制御部は、上記回転台の回転速度に応じた映像出力の歪みを補正するための第1の補正係数を保持するデータテーブルを有し、
上記信号処理部は、上記制御部により上記データテーブルから読み出された第1の補正係数に基づいて、上記記憶部に保持された映像の切り出しを補正して表示映像として出力する監視カメラシステム。
【請求項2】
撮像部のズーム倍率を可変にするズームレンズ光学系を備え、
制御部は、データテーブルに第1の補正係数に加え、上記ズームレンズ光学系のズーム倍率と回転台の回転速度とに応じた映像出力の歪みを補正するための第2の補正係数を保持し、
上記信号処理部は、上記制御部により上記データテーブルから読み出された上記第1の補正係数及び上記第2の補正係数に基づいて、記憶部に保持された映像の切り出しを補正して表示映像として出力することを特徴とする請求項1記載の監視カメラシステム。
【請求項3】
信号処理部は、映像のズーム倍率を可変にする電子ズーム機能を有し、
制御部は、データテーブルに第1の補正係数に加え、上記電子ズーム機能によるズーム倍率と回転台の回転速度とに応じた映像出力の歪みを補正するための第3の補正係数を保持し、
上記信号処理部は、上記制御部により上記データテーブルから読み出された上記第1の補正係数及び上記第3の補正係数に基づいて、記憶部に保持された映像の切り出しを補正して表示映像として出力することを特徴とする請求項1記載の監視カメラシステム。
【請求項4】
信号処理部は、制御部によりデータテーブルから読み出された補正係数を用いて、1フレーム分の映像のライン毎に記憶部からの切り出し開始位置を算出し、この切り出し開始位置から切り出して表示映像として出力することを特徴とする請求項1から請求項3のうちのいずれか1項記載の監視カメラシステム。
【請求項1】
監視対象を撮像する撮像部、上記撮像部の撮像出力を映像信号処理する信号処理部、上記信号処理部の映像出力を保持する記憶部及び上記信号処理部による映像信号処理を制御する制御部を有する監視カメラと、
上記監視カメラを回転自在に支持し、上記制御部によって回転が制御される回転台とを備え、
上記制御部は、上記回転台の回転速度に応じた映像出力の歪みを補正するための第1の補正係数を保持するデータテーブルを有し、
上記信号処理部は、上記制御部により上記データテーブルから読み出された第1の補正係数に基づいて、上記記憶部に保持された映像の切り出しを補正して表示映像として出力する監視カメラシステム。
【請求項2】
撮像部のズーム倍率を可変にするズームレンズ光学系を備え、
制御部は、データテーブルに第1の補正係数に加え、上記ズームレンズ光学系のズーム倍率と回転台の回転速度とに応じた映像出力の歪みを補正するための第2の補正係数を保持し、
上記信号処理部は、上記制御部により上記データテーブルから読み出された上記第1の補正係数及び上記第2の補正係数に基づいて、記憶部に保持された映像の切り出しを補正して表示映像として出力することを特徴とする請求項1記載の監視カメラシステム。
【請求項3】
信号処理部は、映像のズーム倍率を可変にする電子ズーム機能を有し、
制御部は、データテーブルに第1の補正係数に加え、上記電子ズーム機能によるズーム倍率と回転台の回転速度とに応じた映像出力の歪みを補正するための第3の補正係数を保持し、
上記信号処理部は、上記制御部により上記データテーブルから読み出された上記第1の補正係数及び上記第3の補正係数に基づいて、記憶部に保持された映像の切り出しを補正して表示映像として出力することを特徴とする請求項1記載の監視カメラシステム。
【請求項4】
信号処理部は、制御部によりデータテーブルから読み出された補正係数を用いて、1フレーム分の映像のライン毎に記憶部からの切り出し開始位置を算出し、この切り出し開始位置から切り出して表示映像として出力することを特徴とする請求項1から請求項3のうちのいずれか1項記載の監視カメラシステム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2009−253434(P2009−253434A)
【公開日】平成21年10月29日(2009.10.29)
【国際特許分類】
【出願番号】特願2008−96206(P2008−96206)
【出願日】平成20年4月2日(2008.4.2)
【出願人】(000006013)三菱電機株式会社 (33,312)
【Fターム(参考)】
【公開日】平成21年10月29日(2009.10.29)
【国際特許分類】
【出願日】平成20年4月2日(2008.4.2)
【出願人】(000006013)三菱電機株式会社 (33,312)
【Fターム(参考)】
[ Back to top ]